Адаптация сцепления на роботизированной коробке Тойота ✅
Владельцам японских автомобилей с роботизированными коробками знакомы подергивания, скачки с передачи на передачу и задумчивость при переключении. С таким поведением не обязательно мириться, сделайте чип-тюнинг.
Кроме улучшения эластичности, у прошивки есть другие плюсы:
- Увеличиваются мощность и крутящий момент;
- Пропадает задумчивость педали газа;
- Сглаживает провал при разгоне;
- Коробка передач переключается мягко и без рывков;
- Снижается расход топлива, при условии, что вы сохраните манеру вождения;
- Оптимизируется общая динамика автомобиля;
- Повышается тяга на низких оборотах;
- Улучшается работа двигателя с включенным кондиционером.
Перед процедурой проведите инициализацию или адаптацию сцепления робота Тойоты в условиях сервиса. Обычно проблемы с коробкой имеют модели Королла, Ярис и Аурис.
Примерно к 35 000–54 000 км пробега на роботе изнашивается сцепление, что проявляется в характерном поведении КПП.
Когда необходима инициализация и что это такое
Адаптация или инициализация — это согласование узлов и механизмов РКПП с учетом степени износа, такая процедура необходима при каждом обслуживании РКПП. При этом есть ряд признаков, которые говорят о некорректной работе коробки передач:
- Вой, жужжание, повышенный шум;
- Коробка пробуксовывает;
- Передачи переключаются с рывками, скачками и ударами;Загорается «Check Engine». Диагностика выдает ошибки P0919, P0810, P0949;
- Нулевая реакция на нажатие педали газа: обороты выше, а скорость на прежнем уровне;
- Произвольно отключается трансмиссия.
Если перед чип-тюнингом проблем в работе РКПП нет, кроме подергиваний, задумчивости и провалов при переключении передач, все равно советуем провести адаптацию робота. После перепрошивки коробка самостоятельно подстроится и исчезнут баги с задумчивостью.
Инициализация робота Тойота Королла
Сбои в работе коробки исправляются по-разному:
- Ремонтируются механизмы приводов переключения КПП и включения сцепления;
- Прокачивается или адаптируется сцепление через обучение момента трогания;
- С помощью специального оборудования проводится настройка приводов РКПП и адаптация сцепления Тойоты Королла;
- Проводится замена пакета сцепления с обязательной инициализацией КПП робота Тойота Королла;
- Меняется проводка, если причина в потере контакта.

Не рекомендуем проводить процедуру самостоятельно. Без полной диагностики неисправностей неосторожные действия могут привести к поломке, ремонт которой обойдется дорого. В автосервисах есть необходимое оборудование и опытные специалисты, которые проведут процедуру качественно.
Регулярная диагностика и обслуживание продлит срок службы коробки. Придерживайтесь правила: каждые 50 000 км проводить инициализацию РКПП Тойоты, а не дожидаться первых признаков неисправности.
Рекомендуем посмотреть
Toyota corola, не проходит адаптация робота
Проверьте, правильно ли Вы выполнили адаптацию роботизированной коробки передач, выполняется она следующим образом:
— переключаем рычаг передач в состояние N, выключаем зажигание, ставим авто на ручник;
— перемыкаем контактоы в диагностическом разъеме DLC3;
— включение зажигания (тормоз отпущен, машину пока не заводим).
— 3 секунды жмем на педаль тормоза;
— ждем двух звуковых сигналов зуммеров;
— жмем на педаль тормоза;
— оставляем тормоз нажатым и перемещаем рычаг переключения передач в следующем порядке: N – E – M – плюс – М – плюс – М – плюс – М – плюс – М – Е – N;
— педаль тормоза отпускаем;
— жмем педаль тормоза опять;
— ждем, пока зуммер издаст серию из звуковых сигналов с интервалом 0,5 сек;
— нажимаем на тормоз, переключаем рычаг передач в положение «-», не отпуская педаль тормоза;
— отпускаем тормоз;
— выключаем зажигание и ждем не менее 10 сек;
— отсоединяем контакты диагностического разъема DLC3.

Далее при запуске ДВС начнет мигать индикатор N также как и у Вас. После того, как индикатор перестанет мигать, некоторое время, заглушите двигатель. После того, как индикатор перестанет мигать, адаптация завершена.
Ниже также загрузил для Вас выдержку из руководства по ремонту, в ней описано, как производить замену сцепления, проверьте также, правильно ли заменили.
Балаково, LADA (ВАЗ) 2108
Ремонт роботизированной КПП, а также её отличия и недостатки от автоматической трансмиссии.
Коробка передач, робот или автомат:
в чём разница и каковы преимущества каждой из трансмиссий и на чём в итоге остановить свой выбор?
Чтобы понять, чем отличается АКПП от робота, нужно разобраться с принципом работы каждой из указанных трансмиссий.
По сути робот — это механическая КПП дополненная автоматическим управлением с исполнительными механизмами, которые отвечают за переключение передач и работу сцепления.
Переключение передач происходит также как и в случае с механической трансмиссией, но водитель в этом процессе не участвует.
Первостепенной целью создания роботизированной КПП являлось снижение стоимости трансмиссии и одновременное слияние всех преимуществ механики и автомата.
Принципиальные отличия :
- В случае с роботом это механика с блоком управления, устройство АКПП абсолютно иное.
- Двигатель передает крутящий момент на РКПП через сцепление, на АКПП через гидротрансформатор.

- Плавность и скорость переключений у АКПП на порядок выше.
- Положительное отличие робота от автоматической трансмиссии заключается в бюджетном ремонте и обслуживании первого.
- В роботизированной КПП значительно меньше объем масла.
- Робот требует периодического обслуживания и адаптации точек схватывания.
- Вес и габариты АКПП значительно больше его роботизированного аналога.
Плюсы и минусы роботизированной КПП
| Преимущества | Недостатки |
|
|

Ремонт роботизированных трансмиссий в «МИР GM«.
Преимущества ремонта РКПП вашего авто у нас:
- Мы ремонтируем роботизированные КПП по самым низким ценам и с гарантией.
- Опыт работы по ремонту РКПП более 12 лет.
- Прием авто в работу без записи.
- Результат диагностики и полной дефектовки в течении дня.
- Только оригинальные запасные части.
- Использование запасных частей заказчика.
- При ремонте мы используем современное ремонтное и диагностическое оборудование.
- Скидки по карте постоянного клиента до 20%.
Мы ремонтируем РКПП таких марок:
• Easytronic от Opel;
• Allshift от Mitsubishi;
• Dualogic от Fiat;
• Durashift EST от Ford;
• MultiMode от Toyota;
• SensoDrive от Citroen;
• 2-Tronic от Peugeot.
• Quickshift от Renault;
• R-Tronic от Audi;
• Selespeed от Alfa Romeo;
• SMG от BMW.
Адаптация точек схватывания.
Еще одним важнейшим пунктом работ для роботизированной КПП является замена рабочей жидкости сцепления и адаптация механизма выжима сцепления РКПП.
Она представляет собой настройку работы системы сцепления.
Также эта процедура называется перепрограммированием РКПП.
Учитывая особенность конструкции РКПП, необходимо регулярно выполнять адаптацию, благодаря этому вы значительно продлите срок службы сцепления.
Процесс приема автомобиля на диагностику РКПП и его ремонт выглядит следующим образом:
- консультирование по вашей неисправности с мастером- приемщиком
- прием автомобиля на диагностику
- полная диагностика РКПП; проверка электрических цепей, проверка уровня масла в КПП и рабочей жидкости сцепления, проверка работоспособности сцепления
- проверка масла РКПП на наличие металлической стружки
- вскрытие поддона и дефектовка РКПП
- дефектовка электронного блока управления сцеплением
- разборка, промывка деталей и узлов
- согласование стоимости ремонта
- получения запасных частей
- сборка
- замена сцепления (при необходимости)
- установка РКПП на автомобиль
- диагностика и тест- драйв
- выдача готового автомобиля клиенту
Прайс по ремонту РКПП:
Диагностика РКПП — 1200 р.
Замена рабочей жидкости сцепления* — от 1600 р.
Адаптация — от 1200 р.
Замена масла в РКПП* — от 1800 р.
Снятие эл. привода сцепления — от 1600 р.
Снятие/установка КПП — от 7000 р.
Дефектовка механической части РКПП — от 8000 р.
Дефектовка эл. привода сцепления — от 2000 р.
Замена комплекта сцепления* — от 2000 до 8000 р.
Ремонт эл. привода сцепления* — от 10000 р.
Переборка механической части КПП* — от 12000 р.
* цены указаны без учета запасных частей и ГСМ.
Если у вас появились описанные ниже симптомы не тяните с диагностикой, т.к. электроника робота может перевести автомобиль в аварийный режим и его транспортировка будет возможна только на эвакуаторе:
- периодически при запуске двигателя на панели бортового компьютера загорается лампа «F» или лампа неисправности КПП;
- появились рывки при переключении режимов;
- присутствует пробуксовка при разгоне;
- не включается задняя передача;
Наш телефон для консультации при неисправности РКПП:
8-917-551-8880 Приемка сервиса
Роботизированная коробка передач ремонт робот
 org/ListItem»>Коробка автомат ремонт АКПП
org/ListItem»>Коробка автомат ремонт АКПП- Ремонт роботизированных коробок передач
Ремонт роботизированных коробок передач всех моделей
диагностика | замена | адаптация | купить | обмен роботизированной кпп
преселективная кпп | замена сцепления
Артем 8 965 126 13 83 Вадим 8 925 675 78 75
Производим качественный ремонт роботизированных кпп и преселекторных коробок передач, легковых и грузовых автомобилей, таких производителей как: Ауди, БМВ, Форд, Фиат, Ситроен, Тойота, Пежо, Рено, Хонда, Мицубиси, ЛАДА и других марок автомобилей. Производим замену сцепления, диагностику и адаптацию электронных блоков управления.
Полная диагностика автомобиля при ремонте – бесплатно!
Если Вы владелец автомобиля с роботизированной коробкой передач возможно после квалифицированной диагностики профессиональным оборудованием, считывания кодов неисправностей и их удаления с электронного блока управления (ЭБУ), ваш ремонт будет ограничен устранением неисправности в электронной части системы управления отвечающего за соответствующую работу вашей трансмиссии. Проблемы в механической части показывают себя отказом движения автомобиля вперед или назад (периодическое или постоянное).
|
Работа по роботизированной КПП |
Цена |
|
Ремонт |
5.000 |
|
Снятие и установка |
5.000 |
|
Адаптация |
5.000 |
|
Ремонт электронного блока управления |
от 12. |
|
Замена сцепления (при снятой кпп) |
6.000 |
|
Замена трансмиссионного масла и диагностика |
2.000 |
 000
000Комплекс услуг по ремонту роботизированной коробки переключения передач:
- консультирование мастером по ремонту /по телефону бесплатно/
- доставка автомобиля в ремонт /в пределах г.Москва 3 000р.. С московской области и др. регионов РФ — по договоренности/
- комплексная диагностика автомобиля /определение наличия неисправности двигателя, кпп, АБС, тормозной системы; проверка электрических цепей автомобиля на наличие коррозии, проверка кинематических разрушений агрегата, проверка уровня трансмиссионного масла, проверка работоспособности гидросистемы сцепления/ — при ремонте бесплатно
- визуальный осмотр, проверка целостности корпуса
- проверка содержания трансмиссионного масла на наличие стальной, алюминиевой или бронзовой крошки
- вскрытие поддона /при необходимости/
- снятие с автомобиля
- разборка, промывка деталей и узлов
- дефектовка /присутствие автовладельца — обязательно/
- согласование с автовладельцем стоимости полного ремонта и даты окончания ремонта
- получения со склада запчастей /рем.
 комплекта, расходных материалов, узлов/
комплекта, расходных материалов, узлов/ - ремонт /аргонная сварка/ корпуса коробки передач при необходимости
- сборка
- замена сцепления /по просьбе автовладельца/
- установка на автомобиль
- заправка трансмиссионным маслом
- выходная диагностика и тестированный заезд автомобиля
Гарантия от 1 до 6 месяца или 30 000 км. пробега.
| Телефон мастера приемщика по ремонту: | Артем 8 /965/ 126 13 83 Вадим 8 /925/ 675 78 75 |
| Помощь эвакуатора /круглосуточно/, диспетчер: | 8 /926/ 167 15 40 8 /985/ 888 68 14 |
Свой склад запчастей необходимых для ремонта роботизированных коробок передач. Подшипники, сальники, шестерни, синхронизаторы, муфты передач, валы, дифференциалы в наличии и под заказ на все марки автомобилей.
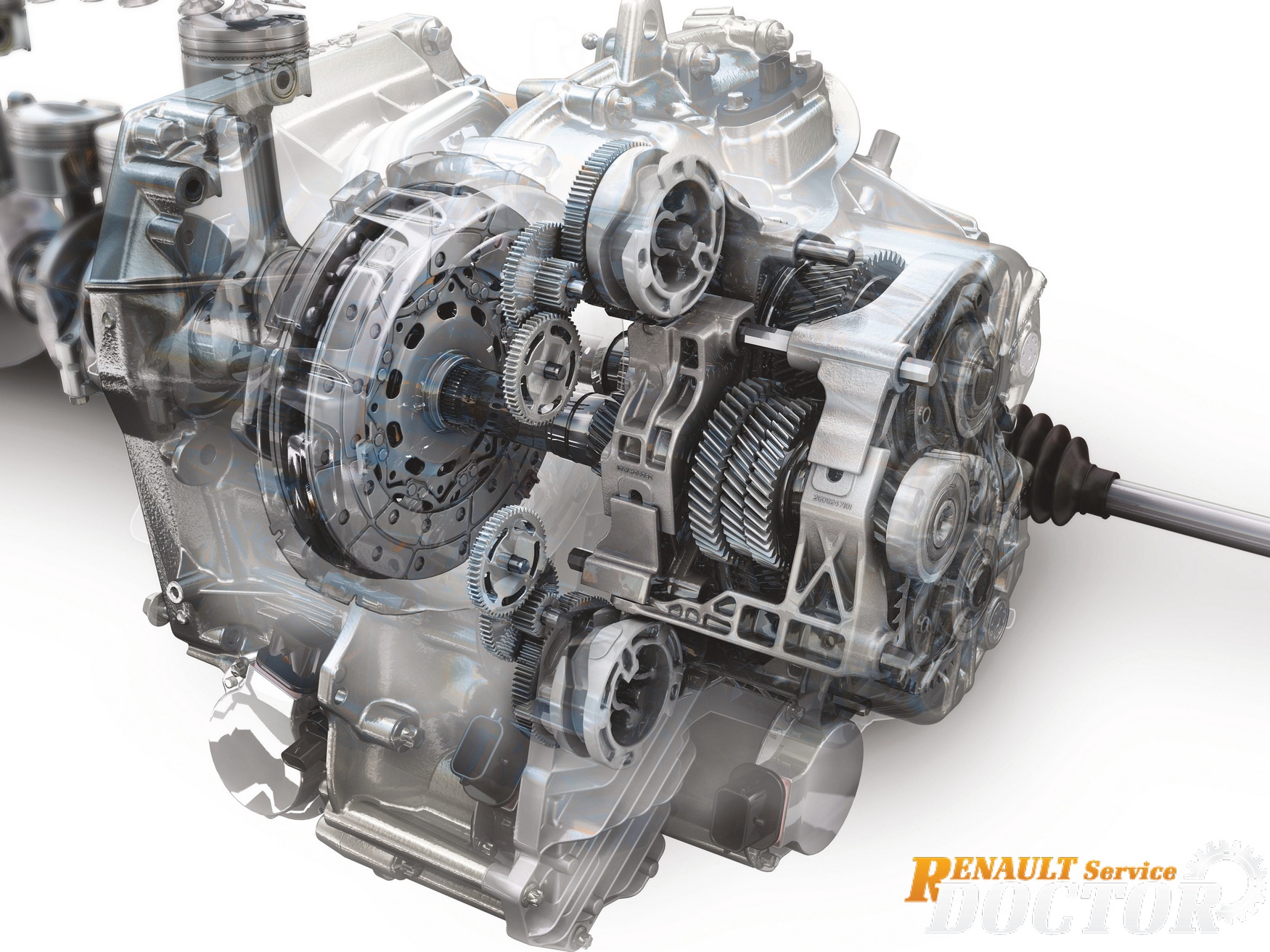
РОБОТИЗИРОВАННАЯ КОРОБКА ПЕРЕДАЧ (в разрезе)
Схема роботизированной коробки передач (пример)
Ремонт роботизированной КПП
Многие ведущие производители автомобильной техники комплектуют свои модели роботизированными коробками, обеспечивающими переключение передач. Конструктивно они компонуются на платформе механических КПП с автоматизацией процесса выключения/включения сцепления и выбора оптимального передаточного усилия. Электронный блок, на который возложены функции по управлению работой агрегата, анализирует действия водителя, учитывает условия движения транспортного средства и по установленному алгоритму обеспечивает работу исполнительных устройств для включения соответствующей передачи.
Предлагаем вам два видео, на первом будет показан электронный блок выбора передач, на втором включения и выключения сцепления:
- Актуатор переключения передач Toyota Corolla — Auris
- Привод включения сцепления Toyota Corolla — Verso — Yaris — Auris
Роботизированная КПП предоставляет водителю и пассажирам комфорт как и автоматическая трансмиссия, а также отличается надежностью и позволяет экономно расходовать топливо по типу механической коробки. По цене коробка-робот дешевле АКПП, поэтому такие агрегаты устанавливаются как на транспортные средства бюджетного, так и премиум класса.
Особенности конструкции
В отличие от агрегатов механического типа коробка робот предусматривает в своем составе электронику, управляющую сцеплением и передаточными ступенями. Для передачи усилия от коленвала мотора конструктивно предусматриваются фрикционы, состоящие из одного или нескольких дисков. Более совершенные модели роботов комплектуются сцеплением двойного типа, благодаря которому обеспечивается неразрывная передача вращательного момента.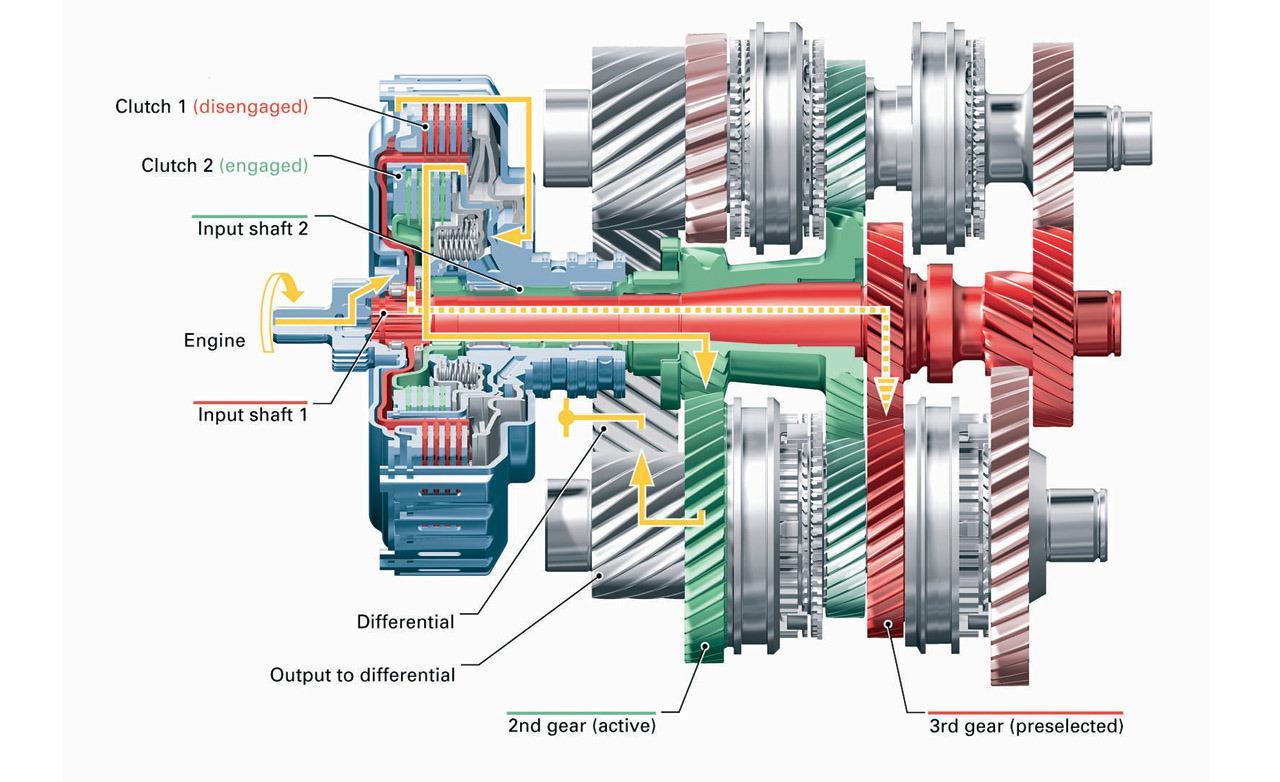
КПП робот независимо от модификации изготавливается на базе готовых механических коробок. Выключение сцепления обеспечивается с помощью гидравлики или электропривода. Функции исполнительных устройств в электроприводе выполняют электромоторы, а в гидроприводе цилиндры с электромагнитными клапанами. Гидропривод благодаря постоянному давлению в системе обеспечивает более быстрый выбор скоростей за время, составляющее в современных моделях до 0,05 секунды.
Электрический привод характеризуется медленной работой по выбору требуемого передаточного числа (0,5 сек.), но отличается меньшим потреблением энергии. Поэтому роботизированная КПП с электроприводом устанавливается в основном на автомобили бюджетного класса, а дорогие авто комплектуются роботом с гидроприводом.
Принцип работы агрегата
Электронная система, на которую возложены функции по обеспечению управления процессом переключения передач, включает ЭБУ, а также исполнительные устройства. К блоку управления с целью получения необходимой для принятия решения информации подключаются специальные входные датчики. Они создают импульсы, благодаря которым кодируются требуемые для управления параметры:
Они создают импульсы, благодаря которым кодируются требуемые для управления параметры:
- частота вращения вала на входе и выходе агрегата;
- положение селектора включения передач;
- давление и уровень технической жидкости и пр.
Блок управления на основе полученной информации генерирует управляющие импульсы, передающиеся на механизмы исполнения, работа которых организуется строго с учетом заложенного алгоритма. При этом обеспечивается взаимодействие ЭБУ коробки робота с управляющим модулем силового агрегата и блоком управления антиблокировочной тормозной системой. В качестве недостатка роботизированной КПП можно выделить большое время на переключение передач. На практике это проявляется рывками и провалами при динамичном разгоне, что приводит к ухудшению комфорта при управлении авто.
Роботизированная коробка, состоящая из двойного сцепления, лишена этих недостатков. Главное преимущество такого технического решения в обеспечении оперативного переключения ступеней без разрыва мощности крутящего момента. Водителю предоставляется возможность выбирать и включать следующую передачу без перерыва на выключение предыдущей ступени. Такие коробки получили название преселективные. Кроме того КПП робот, оснащенный двумя сцеплениями, отличается:
Водителю предоставляется возможность выбирать и включать следующую передачу без перерыва на выключение предыдущей ступени. Такие коробки получили название преселективные. Кроме того КПП робот, оснащенный двумя сцеплениями, отличается:
- высокой скоростью переключения передач;
- компактными размерами, что является большим плюсом для малолитражек;
- отличной разгонной динамикой авто;
- возможностью сэкономить топливо.
Типичные неисправности
Профессиональный ремонт коробки робота выполняется специалистами нашей мастерской. Роботизированная трансмиссия отличается сложной конструкцией. В процессе эксплуатации агрегат подвержен различным неисправностям. Поломки возникают по причине нарушения правил эксплуатации технологичного агрегата, естественного износа вследствие длительной эксплуатации, а также конструктивных особенностей.
Узлом, который наиболее подвержен поломкам и чаще других требует ремонта, является сцепление. Изнашивается ведомый диск, корзина, а также выжимной подшипник с направляющими. Такие неисправности проявляются в пробуксовке при резком старте и динамичном разгоне. При износе сцепления до критического значения электроника переводит робот в аварийный режим. Опытные мастера выполняют квалифицированный демонтаж изношенных дисков и устанавливают оригинальные детали.
Ремонт коробок роботов может потребоваться также по причине неисправности актуаторов, представляющих собой электромеханические приводы, выполняющие выключение сцепления и переключение передач. Механизмы подвергаются интенсивной эксплуатации, поэтому происходит интенсивный износ щеток, зубчатых колес, возникают обрывы цепей электромоторов и пр. Данные неисправности можно определить по рывкам машины при старте с места.
Двойное сцепление, которым оборудуются современные роботизированные модели, также является проблемным узлом. По причине конструктивных особенностей диски подвергаются интенсивному износу. При трогании с места и в моменты переключения передач начинают ощущаться рывки и повышенная вибрация. Устраняется неисправность заменой узла сцепления. Выполняя рекомендации производителей относительно перевода селектора в нейтраль при необходимости выполнить остановку на протяжении более пяти секунд, можно существенно продлить срок службы этого узла. Многими производителями устанавливается продолжительный период гарантийной эксплуатации, составляющий 5 лет.
По причине конструктивных особенностей диски подвергаются интенсивному износу. При трогании с места и в моменты переключения передач начинают ощущаться рывки и повышенная вибрация. Устраняется неисправность заменой узла сцепления. Выполняя рекомендации производителей относительно перевода селектора в нейтраль при необходимости выполнить остановку на протяжении более пяти секунд, можно существенно продлить срок службы этого узла. Многими производителями устанавливается продолжительный период гарантийной эксплуатации, составляющий 5 лет.
Необходимость в проведении ремонта коробок роботов возникает также по причине засорения каналов гидроблока продуктами износа дисков и прочих элементов. Электронные датчики притягивают металлическую стружку, которая нарушает их нормальное функционирование. При разгоне и во время движения наблюдается пробуксовка, ощущаются рывки, удары или происходит полное прекращение движения. Конструктивные элементы, расположенные в коробке, постоянно подвергаются термическим нагрузкам вследствие изменения температуры рабочей жидкости, поэтому часто нарушаются (выгорают) контакты, выходят из строя клапаны и датчики.
В процессе эксплуатации роботизированной коробки может потребоваться ремонт вилки, с помощью которой осуществляется выбор требуемой передачи в результате ее износа. При появлении сильного постороннего гула причина кроется в подшипниках качения.
Квалифицированный ремонт
Множество неисправностей, из-за которых требуется ремонт коробки робота, определяются с помощью диагностики на компьютерном оборудовании. Благодаря расшифровке кодов предоставляется возможность точно вычислить неисправности электронных модулей системы управления, а также выявить механические поломки.
Определить, какой ремонт коробки робота необходимо выполнить, смогут специалисты автомастерской после компьютерной диагностики и считывания кодов ошибок. Во многих случаях требуется разборка агрегата для визуального осмотра составных элементов. На специализированном автосервисе в наличии все необходимое оборудование для качественного выполнения операций. Мастера прошли специальную подготовку и в совершенстве знают конструкцию и принцип работы как современных роботизированных коробок, так и снятых с производства.
Организована поставка оригинальных запасных частей от надежных производителей, поэтому клиентам предлагаются качественные детали по приемлемой стоимости. При выполнении ремонта роботизированной трансмиссии мастерами соблюдается вся технологичная последовательность, определенная производителем. Специалисты нашей мастерской устранят любые проблемы и выполнят все операции на высоком уровне с гарантией качества.
Адаптация коробки передач DS085, ошибка 12 RTFM в VW Lupo 3L
Коробка передач типа DS085 устанавливалась на автомобили:
Volkswagen Lupo 3L / Фольксваген Лупо 3Л (6E1) 1999 — 2006
Audi A2 / Ауди А2 (8Z0) 2000 — 2005
SEAT Arosa / Сеат Ароса (6B1) 2001
Всем привет, возникла проблема с адаптацией ЭБУ.
На сервисе говорят, что адаптацию надо делать каждый год или каждые 30 000 км. так как сцепление изнашевается…
так как сцепление изнашевается…
Проблему решил механическим способом, то есть чтоб авто не дергалось когда едешь и при переключении передач нужно потенциометр адаптировать под сцепление. НО если такой возможности нет то делаем наоборот сцепление подстраиваем под потенциометр, для этого нужно всего лишь укоротить тросик сцепления, но не перестарайтесь.
Мой Фольксваген Лупо так дергался, что при заднем ходе глох от рывка, когда укоротил тросик на (3) оборота, то все стало супер.
VWLUPO 3L a в этой машины методика калибровки одна и та же, так как на всех стоят 5-ти скоросные изитроники то есть
The DS085 Electronic Manual Gearbox.
The 085 electronic manual gearbox was developed specially for the Lupo 3L and is operated by means of an electronic gate selector lever.
Адаптация с помощью диагостического адаптера:
5-Speed Electronic Manual Transmission (085)
Special Procedures
Prerequisites:
Transmission Oil Level correct.
No Fault Codes stored.
Supply voltage at least 12V.
Selector Lever in Tiptronic Mode.
The following Basic Settings need to be carried out when:
Every 30000 km / 19000 mi
Engine has been removed/replaced
Transmission has been removed/replaced
Engine Control Module has been replaced
Transmission Control Module has been replaced
Clutch has been removed/adjusted/replaced
Gear Selector or Actuator has been removed/adjusted/replaced
Selector Lever has been removed/adjusted/replaced
Common issues:
The connection to the control module may be interrupted after starting the engine, as long as you do NOT switch of the ignition the cntrol module will continue at exactly the same position where the connection got interrupted. Step back into the basic setting as usual.
The following 3 Adaptations need to be carried out in a row!
Clutch Travel Sender Adaptation
[Select]
[02 — Transmission]
[Measuring Blocks — 08]
Block 002
[Go!]
Remove connector from hydraulic unit.
Check field 2, specification is 1.8…2.0 V.
If the specification is not reached, adjust the Clutch Travel Sender (G162).
Re-attach connector to hydraulic unit.
[Done, Go Back]
[Close Controller, Go Back — 06]
Cycle ignition OFF/ON.
[Select]
[02 — Transmission]
[Fault Codes — 08]
[Clear Codes — 05]
[Done, Go Back]
Gear Actuator Adaptation
[Basic Setting — 04]
Block 014
[Go!]
1st field should change from WAIT to ADJUST.
Loosen the gear actuator nut and tighten it with zero-potential.
Switch selector lever in E or D and back to Tiptronic Mode.
1st field should show WAIT now, tansmission now does some shifts, you can monitor them in field 2 (Range: 0…28).
1st field should change from WAIT to (-), pull the selector lever to Minus and hold it for 5 seconds.
1st field should show STOP now, put the selector lever in position STOP and wait 5 seconds.
1st field should show KickDown now, floor the accelerator pedal completely (to kick down) and wait 5 seconds.
1st field should show N now, put the selector lever in position N.
1st field should show StartMot now, start the engine and let it idle 15 seconds.
1st field should change from SEARCHNG to IGN.OFF, put the selector lever in Position STOP.
Switch ignition off and wait 15 seconds.
In case there is an Error during the Basic Setting, the Measuring Value Blocks (MVB) will show RTFM! followed by a Number which describes the Reason why it failed.
7 = Potentiometer 2 for Gear Recognition (G240)
Check Switches and Wiring/Connectors using Measuring Value Blocks (MVB) and Wiring Diagram.
8 = Potentiometer 1 for Gear Recognition (G239)
Check Switches and Wiring/Connectors using Measuring Value Blocks (MVB) and Wiring Diagram.
9 = Reverse Light Switch (F4)
Check Switches and Wiring/Connectors using Measuring Value Blocks (MVB) and Wiring Diagram.
10 = Potentiometer Values fluctuating during Measurement
Check the corresponding Potentiometers in Measuring Value Blocks (MVB) 015 to 018
Check Fault Codes (repair if necessary) and Perform Basic Setting again
11 = Potentiometer Values
Check the corresponding Potentiometers in Measuring Value Blocks (MVB) 015 to 018
Check Fault Codes (repair if necessary) and Perform Basic Setting again
12 = Gear Actuator incorrectly adjusted or measured values out of specification.
Potentiometer, Valves and Selector Finger at the Ball Heads for correct assembly and seating
Perform Basic Setting again after adjusting the Gear Actuator
Creep Point Adaptation
[Select]
[02 — Transmission]
[Measuring Blocks — 08]
Block 025
[Go!]
Start the engine, engage the handbrake and press the foot brake.
Put the selector lever in position E or D.
You can determine the number of creep points left in field 3. It should start at 5 and count down to 0.
Release the brake pedal for at least 3 seconds, press the brake pedal again and hold it for at least 3 seconds.
Repeat the last step until field 3 shows 0.
If the specified value in field 3 is not reached, check fault codes and perform basic setting again.
[Done, Go Back]
[Close Controller, Go Back — 06]
Наиболее часто задаваемый вопрос это почему при адаптации коробки выскакивает ошибка 12 и пишет RTFM
12 = Gear Actuator incorrectly adjusted or measured values out of specification.
Potentiometer, Valves and Selector Finger at the Ball Heads for correct assembly and seating
Perform Basic Setting again after adjusting the Gear Actuator .
износ цилиндра и поршня на самой верхней картинке этой темы вызывал ошубку 12
НО будьте крайне внимательны при разборке робота — шлицы очень мелкие и нету *слепоцо* шлица
шат в этой тяге тоже вызывает ошибку 12
на наличие люфта проще проверять когда делается адаптация и во втором окне стоит ADJUST просто в это время робот стопорится внутри и при этом люфт легко ощутим
В этом случае нужно зажать болтик с обратной её стороны, если не помогло тогда разобрать робот и шлицы намазать клеем тот что для резбовых соединений или посадки втулок и максимум но с умом зажать болтик. Еще раз напоминаю шлицы мелкие и очень легко сбить заводские настройки
вот этот болтик, звездочка помоему 25
так же возникает ошибка 12 если неправильно совмещены отверствия
Loosen the gear actuator nut and tighten it with zero-potential.
Так же ошибка 12 выскакивала когда выходило со строя реле гидронасоса, номер его 53 стоит под панелью за предохранителями, верхний ряд второе слева + к нему предохраниталь номер 40 (но это для первого поколения лупиков для тех у кого на кулисе стоит Е у кого Д то там немного подругому, НО НЕ зацикливайтесь над реле, если у вас гидронасос заводится при открытии двери или при вкл. зажигания
P.S. это только часть ошибок 12 те которые мне встречались на практике. Если логически подумать то при выходе со строя одного из двух потенциометров которые стоят на роботе или одного из четырёх клапанов то это тоже вызовет ошибку 12. но мне такое ещё не встречалось. Клапана проверить легко, снять 4 фишки и подавать поочерёдно напряжение равное 12в. В это время, при наличии давления в гидроакуме, робот должен двигатся
Вот такого плана задали вопрос:
как должны быть подключены нижние элекроклапана? С длинным проводом ближе к двигателю?
Ответ:
Наченая с верху в низ
1-белый, серый
2-белый, белый
3-красный,жолтый
4-синий, фиолетовый (длинный)
это цвет проводов которые подходят к розёмам, НО на каждом есчё есть коричневая полоска я её не указовал
Ещё немного полезной информацеи как бороться с самой тупой ошибкой номер 12.
в прошлом месяце приезжало два ЛУПИКА на адаптацию, то есть их притягивали)))))) . При попытке адаптировать постоянно заканчивалось вот так: RTFM, то есть ошыбка в роботе 12.
Пришлось снимать робот, (проще всего вытаскивать всю гидравлику не розьединяя шланги), проделать всё выше мною написанное, НО этого было мало, все равно 12.
Тогда я заметил, что имеется люфт в нижней части робота, снял робот, замерил диаметр шайб, и был в шоке вместо 20мм. там осталось около 18 мм. Этого было достаточно чтобы не пройти адаптацию. После того как я поменял шайбы (делал их сам) адаптация пролетает просто на УРА, (для опыта пробовал раз 8 и каждый раз всё ОК.) и это с обоими Фольксваген Лупо.
Если кто не понял о чём я, то эти шайбы видно на четвёртй фотке вверху.
Ещё одна проблема в LUPO 3L:
Перелом вилки 3-4 передач Лично мне эта проблема встречалась уже у трёх клиентов.
СИМПТОМ — при переходе с второй передачи на третью слышен небольшой скрежет в коробке, включение не происходит и лупик уходит сам в себя, и на газ не реагирует.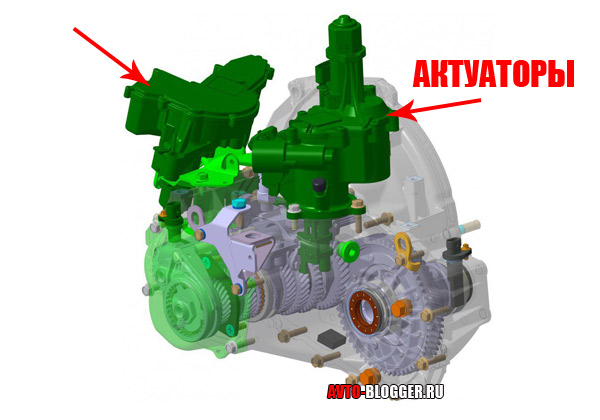
РЕШЕНИЕ ПРОБЛЕМЫ:
Стaвим новую вилочку или завариваем старую. Или можно просто ездить на ручном управлении (типтроне), при этом нужно двойным щелчком перескакивать третью передачу
Кому интересно — весь процес по замене вилки занимает 8 часов
Дополнение от: suhar2
Всем привет!
Хочу поделиться своим первым опытом знакомства с немецким чудом техники под названием ДС085. Не вдаваясь в подробности — оказался у меня в ремонте лупик, остановившийся год назад и безрезультатно протаскавшийся по «автосервисам» все это время, где его окончательно добили. После них он уже даже не заводился.
Беглого осмотра робота хватило, чтобы заявить человеку о гарантированной замене жгута проводов: обломанные и слетающие разъемы (ВСЕ!), пайки и скрутки без изоляции (конечно, не так впечатляет, если не видеть эту картину вживую) и вдогонку более 5 ошибок по обрывам цепей. Заказали, заменили.
Заказали, заменили.
Следующим этапом была проверка показаний потенциометров включения и выбора, вот тут то и поджидала засада. Как оказалось, оба шлицевых соединения на коромыслах были сбиты, так что даже «капельку» (ну это которая сидит на шлицевом валу и цепляет лапку потенциометра) провернуло относительно вала. Так что про адаптацию речи не шло. Для выставления коромысел в нужное положение пришлось снимать и ставить гидроблок не менее 10 раз, т.к. даже пометить как стояли шлицы практически невозможно, т.е. ставил каждый раз можно сказать наугад (ну и наверное потому, что это был первый мой изитроник).
Долгими мучениями результат был получен и вместо RTFM! появился значек (-)!. Ура! Но…. Опять засада. После проверки положений селектора в первом поле SEARCHING не менялось на IGN OFF даже после 15 минут работы движка. Пошарив в Вагкоме по группам пришел к выводу, что не до конца выжимается сцепление. Давление? Было решено изготовить передодник-одним концом хвост как у датчика давления, другим под резьбу манометра от баллона с углекислотой на 100 очков.
Замеры показали, что установленный датчик давления не соответствует нужному номиналу (по словам хозяина он был от какого-то вариатора какой то ауди. хорошо что остался старый датчик, приговоренный сервисменами). Испытания старого ДД показали его полную исправность. Но сцепление-то все равно не выжималось, хотя после замены ДД робот стал щелкать заметно шустрее. Сразу-то не обратил внимания, но потом заметил, что ток на клапане сцепления вместо положенных 0.9А был 1.3А. Получается межвитковое…
И клапан как ремонтная единица не поставляется, а в сборе стоит около 300 евро (б/у конечно). Вскрываем? Да, а что еще остается… Развальцевал, выпотрошил. Вся обмотка в масле. Взял у перемотчиков 0,45 проволоки метров 100 и тупо убил вечер на перемотку катушки. Собрал, воткнул, залил масло. Оооооп! Потенциометр сцепления кажет 4,5!!! Последний этап — регулировка на самом клапане этого значения до 4В. После того, как и это было сделано — лупик завелся и поехал без всяких адаптаций.
Для себя сделал вывод, что данная модель робота сырая в плане защиты от дураков. Ну вот нафига например надо было делать так лекко разборными эти шлицевые соединения? Им никогда ничего не будет если без аварий. Сбить настройки элементарно, а восстановить… Ну да ладно. Все равно у немцев машины лучшие
PS: Огромное спасибо форуму и Сергею1. Без этой информации возможно ничего бы не получилось.
Продолжение и все обсуждения отчета здесь
Спасибо: SERGEY1
Как здесь найти нужную информацию?
Расшифровка заводской комплектации автомобиля (англ.)
Расшифровка заводской комплектации VAG на русском!
Диагностика Фольксваген, Ауди, Шкода, Сеат, коды ошибок.
Если вы не нашли информацию по своему автомобилю — посмотрите ее на автомобили построенные на платформе вашего авто.
С большой долей вероятности информация по ремонту и обслуживанию подойдет и для Вашего авто.
Гармонический редуктор | Розум Роботикс
Шестерня гармонической волны деформации в сервоприводах RDrive
Серия RDrive оснащена интегрированными редукторами для гармоник, в которых используется технология деформационно-волновой передачи. Благодаря передаточному числу 1: 100 и практически нулевому люфту эта технология улучшает характеристики наших серводвигателей. Это дает вам точное управление движением и высокий крутящий момент.
Благодаря передаточному числу 1: 100 и практически нулевому люфту эта технология улучшает характеристики наших серводвигателей. Это дает вам точное управление движением и высокий крутящий момент.
Зачем сервоприводу редуктор
При использовании в сочетании с серводвигателем коробка передач, также называемая редуктором или редуктором скорости, позволяет выполнять следующее:
- Увеличение крутящего момента привода робота.
- Снижение скорости серводвигателя.
- Уравновешивание инерции двигателя и нагрузки.
Эффект возникает из-за того, что шестерни сервопривода создают передаточное число. Применение передаточного числа 1: 100 к двигателю, создающему крутящий момент 2 Н · м, дает выходной крутящий момент 200 Н · м. Точно так же, если двигатель работает со скоростью 4000 об / мин, то же соотношение снизит скорость до 40 об / мин.
Дисбаланс между двигателем и инерцией нагрузки отрицательно влияет на работу роботизированного соединения и увеличивает эксплуатационные расходы. Согласование значений инерции, также достигаемое за счет передаточного числа редуктора, помогает избежать чрезмерного перерегулирования, оптимизировать энергопотребление и улучшить время стабилизации.
Согласование значений инерции, также достигаемое за счет передаточного числа редуктора, помогает избежать чрезмерного перерегулирования, оптимизировать энергопотребление и улучшить время стабилизации.
с редуктором имеют решающее значение для таких приложений, как промышленная робототехника и системы подбора и размещения, где требуется высокий крутящий момент при низкой скорости и превосходная точность движения.
Гармоническая передача
Существует множество доступных технологий зубчатых передач, включая, помимо прочего, прямозубые, планетарные, червячные, гармонические и циклоидальные.В наших сервоприводах RDrive используются гармонические редукторы, основанные на зубчато-волновой передаче, изобретенной в 1957 году К.В. Массером.
С тех пор технология эволюционировала, чтобы обеспечить следующие преимущества:
- Практически нулевой люфт | Повышенная производительность, повышенная точность позиционирования и длительный срок службы серводвигателей без обслуживания.

- Высокое передаточное число | Обеспечивает высокий крутящий момент и низкую скорость на выходе для двигателей меньшего размера.Также возможно изменить соотношение без изменения конструкции или размера всего механизма.
- Компактные размеры и малый вес | Позволяет уменьшить площадь, занимаемую роботизированным приводом, и, таким образом, сэкономить место в вашем приложении.
Когда мы интегрируем технологию волнового редуктора в наши серводвигатели, мы получили люфт менее 0,3 угловой минуты, что позволило достичь высокой точности управления движением. Передаточное число редуктора 1: 100 позволяет нам умножить значение выходного крутящего момента на 100, при этом наши серводвигатели остаются компактными и легкими.
Редуктор деформационной волны: принцип работы
Видео предоставляется только для ознакомления
Серводвигатели с редуктором — сила интеграции
Хотя можно использовать редуктор и сервопривод, не собирая их в единое целое, их интеграция позволяет упростить проектирование и реализацию систем управления движением. В сервоприводе с редуктором RDrive привод и зубчатый механизм уже согласованы для совместной работы и не требуют отдельных процедур проектирования и интеграции, что снижает затраты на проектирование.
В сервоприводе с редуктором RDrive привод и зубчатый механизм уже согласованы для совместной работы и не требуют отдельных процедур проектирования и интеграции, что снижает затраты на проектирование.
Общая длина нашего сервопривода с редуктором короче, чем у узла, в котором серводвигатель отсоединен от коробки передач. Более того, интегрированные узлы устраняют необходимость в дополнительных муфтах, сводя к минимуму риск выхода из строя подшипников из-за несоосности.
Объединив серводвигатель с зубчатым механизмом, мы улучшили управление мощностью и ее использование, что позволило создать лучший, более длинный и мощный сервопривод.
границ | Быстрая динамическая связь улучшает частотную адаптацию осцилляторов для управления движением роботов
1.Введение
Ритмические процессы имеют центральное значение для многих аспектов биологической жизни (Winfree, 1967; Barkai, Leibler, 2000; Goldbeter et al., 2012). Примеры включают сердечный ритм, различные циркадные ритмы и, в частности, все формы биологического передвижения, такие как ходьба, полет или плавание. Последние контролируются определенными нейронными цепями, так называемыми генераторами центральных паттернов (CPG) (Hooper, 2001; Marder and Bucher, 2001). Теоретические модели CPG варьируются от подробных биофизических моделей (Hellgren and Grillner, 1992) до чисто математических осцилляторов (Matsuoka, 1985).В целом, CPG можно описать как нелинейные осцилляторы, которые использовались во многих приложениях для различных вариантов задач управления роботами (Nakamura et al., 2007; Ijspeert, 2008; Pinto et al., 2012; Nassour et al., 2014; Santos et al., 2017). Например, по сравнению с чисто рефлексивными схемами управления (Foth and Bässler, 1985; Cruse et al., 1995), роботы, управляемые осциллятором, обеспечивают более стабильное и надежное передвижение (Kimura et al., 2001; Righetti and Ijspeert, 2008).
Последние контролируются определенными нейронными цепями, так называемыми генераторами центральных паттернов (CPG) (Hooper, 2001; Marder and Bucher, 2001). Теоретические модели CPG варьируются от подробных биофизических моделей (Hellgren and Grillner, 1992) до чисто математических осцилляторов (Matsuoka, 1985).В целом, CPG можно описать как нелинейные осцилляторы, которые использовались во многих приложениях для различных вариантов задач управления роботами (Nakamura et al., 2007; Ijspeert, 2008; Pinto et al., 2012; Nassour et al., 2014; Santos et al., 2017). Например, по сравнению с чисто рефлексивными схемами управления (Foth and Bässler, 1985; Cruse et al., 1995), роботы, управляемые осциллятором, обеспечивают более стабильное и надежное передвижение (Kimura et al., 2001; Righetti and Ijspeert, 2008).
CPG не требуют внешнего входа или обратной связи для создания базовой ритмической активности.Однако им по-прежнему требуются сигналы обратной связи для адаптации и настройки производимой ими активности, например ее частоты. Для теоретической концепции нелинейных осцилляторов универсальный механизм адаптации собственной частоты осциллятора в соответствии с частотой внешнего периодического сигнала, который связан с осциллятором, был сформулирован Ригетти и др. (2006). Эта схема частотной адаптации применима ко многим различным типам генераторов. В отличие от хорошо известного явления увлечения, которое является чисто реактивным механизмом, оказывающим только временное воздействие на колебательную систему (Buchli et al., 2006), схема частотной адаптации постоянно изменяет внутреннюю частоту системы. Генераторы с такой схемой обычно называются адаптивными частотными генераторами (AFO). Было предложено несколько приложений AFO, включая адаптивное управление совместимыми роботами (Righetti et al., 2009), проблемы качания маятника (Spong, 1995; Furuta, 2003), понимание, моделирование и поддержку передвижения человека (Ronsse et al. , 2011a; Tropea et al., 2015; Santos et al., 2017), имитируя плавание рыб (Wang et al.
Для теоретической концепции нелинейных осцилляторов универсальный механизм адаптации собственной частоты осциллятора в соответствии с частотой внешнего периодического сигнала, который связан с осциллятором, был сформулирован Ригетти и др. (2006). Эта схема частотной адаптации применима ко многим различным типам генераторов. В отличие от хорошо известного явления увлечения, которое является чисто реактивным механизмом, оказывающим только временное воздействие на колебательную систему (Buchli et al., 2006), схема частотной адаптации постоянно изменяет внутреннюю частоту системы. Генераторы с такой схемой обычно называются адаптивными частотными генераторами (AFO). Было предложено несколько приложений AFO, включая адаптивное управление совместимыми роботами (Righetti et al., 2009), проблемы качания маятника (Spong, 1995; Furuta, 2003), понимание, моделирование и поддержку передвижения человека (Ronsse et al. , 2011a; Tropea et al., 2015; Santos et al., 2017), имитируя плавание рыб (Wang et al. , 2013), частотный анализ входного сигнала (Buchli et al., 2008) и построение предельных циклов произвольной формы (Righetti et al., 2009). Однако все эти приложения страдают от очень длительного времени адаптации.
, 2013), частотный анализ входного сигнала (Buchli et al., 2008) и построение предельных циклов произвольной формы (Righetti et al., 2009). Однако все эти приложения страдают от очень длительного времени адаптации.
Для данной колебательной системы динамика стандартного AFO определяется только двумя параметрами: силой связи внешнего сигнала с осциллятором и скоростью обучения параметра, определяющего собственную частоту системы.Здесь мы показываем, что при выборе этих двух параметров нужно идти на компромисс между скоростью и точностью получаемой динамики адаптации. Кроме того, мы демонстрируем, что оптимальные параметры для определенного баланса скорости и точности сильно зависят от начальной собственной частоты генератора и целевой частоты, то есть частоты внешнего сигнала. В результате необходима точная настройка параметров в зависимости от ситуации.
Напротив, мы предлагаем расширение стандартного механизма адаптации частоты, которое обеспечивает как быструю, так и точную адаптацию для широкого диапазона исходных собственных и целевых частот без необходимости точной настройки параметров. Далее мы называем этот механизм «Адаптация посредством быстрой динамической связи» (AFDC). Он основан на динамической адаптации силы связи внешнего сигнала. Если разница между текущей собственной частотой и целевой частотой велика, сила связи увеличивается, чтобы ускорить адаптацию. Если разница между текущей собственной частотой и целевой частотой становится небольшой, сила связи уменьшается, чтобы повысить точность адаптации.Этот процесс автономен и может быть интегрирован в динамические уравнения системы. Ни текущая внутренняя, ни целевая частота не должны быть явно доступны, поскольку механизм полагается исключительно на корреляции сигналов. Мы сравниваем процессы адаптации, полученные с помощью обычных AFO, с процессами, полученными с помощью нового механизма AFDC, с помощью количественных показателей скорости и точности адаптации. Мы обнаружили, что механизм AFDC явно превосходит стандартные AFO в тестируемом частотном интервале, охватывающем два порядка величины.
Далее мы называем этот механизм «Адаптация посредством быстрой динамической связи» (AFDC). Он основан на динамической адаптации силы связи внешнего сигнала. Если разница между текущей собственной частотой и целевой частотой велика, сила связи увеличивается, чтобы ускорить адаптацию. Если разница между текущей собственной частотой и целевой частотой становится небольшой, сила связи уменьшается, чтобы повысить точность адаптации.Этот процесс автономен и может быть интегрирован в динамические уравнения системы. Ни текущая внутренняя, ни целевая частота не должны быть явно доступны, поскольку механизм полагается исключительно на корреляции сигналов. Мы сравниваем процессы адаптации, полученные с помощью обычных AFO, с процессами, полученными с помощью нового механизма AFDC, с помощью количественных показателей скорости и точности адаптации. Мы обнаружили, что механизм AFDC явно превосходит стандартные AFO в тестируемом частотном интервале, охватывающем два порядка величины.
2. Результаты
2. 1. Стандартный адаптивный генератор частоты
1. Стандартный адаптивный генератор частоты
В очень общих чертах, осциллятор — это автономная динамическая система с по крайней мере одним аттрактором предельного цикла (Buchli et al., 2006). Естественно, что любую двумерную колебательную систему ( x, y ) можно выразить в виде системы двух уравнений x˙ ( t ) = g x ( x ( t ), y ( t ), θ) и y˙ ( t ) = g y ( x ( t ), y ( t ), θ) где функции g x и g y определяют динамику системы.Мы требуем, чтобы эти две функции зависели не только от переменных состояния x и y , но также явно от переменной θ, которая определяет частоту собственных колебаний f системы. Функция f (θ) может иметь произвольную форму и во многих случаях явно не известна. Мы только предполагаем, что он монотонный. Систему можно преобразовать в генератор адаптивной частоты (AFO), подключив ее к внешнему сигналу F ( t ):
x˙ (t) = gx (x (t), y (t), θ (t)) + ϵF (t) y˙ (t) = gy (x (t), y (t), θ (t) ). (1)
(1)Здесь ϵ обозначает силу сцепления. Кроме того, вводится дополнительная динамика θ-переменной (Righetti et al., 2006):
θ˙ (t) = ± ηF (t) y (t) x (t) 2 + y (t) 2. (2) со скоростью обучения η. Знак в правой части зависит от направления колебаний реальной колебательной системы в фазовом пространстве. Обратите внимание, что в исходной публикации (Righetti et al., 2006) всегда выбирается η = ϵ, поскольку это естественно возникает при выводе правила адаптации из анализа влияния периодического внешнего сигнала F на фазовую скорость осциллятора ( Ригетти и др., 2006). Однако, помимо этого, нет никаких априорных причин, по которым этот выбор должен обеспечивать оптимальные результаты адаптации. Было показано, что, используя это правило, широкий диапазон генераторов может адаптировать свои собственные частоты к частоте практически любого внешнего периодического сигнала F ( t ). В этой статье мы рассматриваем осциллятор Хопфа (рис. 1A), который обладает гармоническим предельным циклом, и осциллятор Ван-дер-Поля (Van der Pol, 1920) (рис. 1B), который, в зависимости от выбора параметров, демонстрирует высокие показатели негармонические колебания.
Рисунок 1. Адаптация двух стандартных адаптивных генераторов частоты . На верхних панелях показано изменение во времени параметра, определяющего частоту θ. Время, в течение которого к системе подается внешний сигнал, обозначено желтой заштрихованной областью. Пунктирными горизонтальными линиями обозначены значения θ 0 и θ ext , соответствующие начальной собственной частоте f 0 и целевой частоте f ext внешнего сигнала, соответственно.Панели ниже показывают переменные колеблющегося состояния x и y и внешний сигнал F в различных коротких временных окнах во время процесса адаптации. В обоих случаях начальная собственная частота генератора составляет f 0 = 4,0, а внешний сигнал представляет собой синусоидальную волну с единичной амплитудой и частотой f ext = 2,0. (A) Адаптивный частотный генератор Хопфа с μ = 1.0 и ϵ = η = 1.0 (см. Методы).Начальное значение параметра θ равно θ 0 = 2π f 0 ≈ 25,1. Соответственно, значение, соответствующее частоте внешнего сигнала, составляет θ ext = 2π f ext ≈ 12,6. Внешний сигнал применяется для 100 ≤ t <700. (B) Адаптивная частота осциллятора Ван дер Поля с μ = 100.0 и ϵ = η = 0.7 (см. Методы). Значения параметра θ, соответствующие f 0 и f ext , равны θ 0 ≈ 34.8 и θ ext ≈ 22,0 (см. Методы). Внешний сигнал применяется для 100 ≤ t <500.
(A) Адаптивный частотный генератор Хопфа с μ = 1.0 и ϵ = η = 1.0 (см. Методы).Начальное значение параметра θ равно θ 0 = 2π f 0 ≈ 25,1. Соответственно, значение, соответствующее частоте внешнего сигнала, составляет θ ext = 2π f ext ≈ 12,6. Внешний сигнал применяется для 100 ≤ t <700. (B) Адаптивная частота осциллятора Ван дер Поля с μ = 100.0 и ϵ = η = 0.7 (см. Методы). Значения параметра θ, соответствующие f 0 и f ext , равны θ 0 ≈ 34.8 и θ ext ≈ 22,0 (см. Методы). Внешний сигнал применяется для 100 ≤ t <500.
Для анализа заданного процесса адаптации мы начинаем с осциллятора с переменной начальной частоты θ 0 , соответствующей начальной собственной частоте f 0 = f (θ 0 ). Здесь функция f (θ) явно не известна, но может быть аппроксимирована численно. Обозначим целевую частоту, т.е.е., частота внешнего сигнала, на f ext . Кроме того, мы определяем целевое значение θ ext как значение θ, такое, что f ext = f (θ ext ) для данного генератора. Частотная переменная θ не изменяется правилом адаптации (уравнение 2), пока внешний сигнал F равен нулю ( t <100 на рисунке 1A). После появления внешнего сигнала θ медленно адаптируется к целевому значению θ ext (100 < t <700 на рисунке 1A).Скорость адаптации увеличивается по мере приближения θ к θ ext . Заключительная фаза адаптации обычно характеризуется небольшим выбросом θ, прежде чем она сойдется к квазипостоянному состоянию с небольшими периодическими колебаниями (600 < t <700 на Рисунке 1A). Теперь при удалении внешнего сигнала, то есть при установке F = 0, генератор поддерживает колебания на адаптированной частоте ( t > 700 на рисунке 1A). Обратите внимание, что не гарантируется, что окончательно достигнутое значение θ точно соответствует θ ext .
Обозначим целевую частоту, т.е.е., частота внешнего сигнала, на f ext . Кроме того, мы определяем целевое значение θ ext как значение θ, такое, что f ext = f (θ ext ) для данного генератора. Частотная переменная θ не изменяется правилом адаптации (уравнение 2), пока внешний сигнал F равен нулю ( t <100 на рисунке 1A). После появления внешнего сигнала θ медленно адаптируется к целевому значению θ ext (100 < t <700 на рисунке 1A).Скорость адаптации увеличивается по мере приближения θ к θ ext . Заключительная фаза адаптации обычно характеризуется небольшим выбросом θ, прежде чем она сойдется к квазипостоянному состоянию с небольшими периодическими колебаниями (600 < t <700 на Рисунке 1A). Теперь при удалении внешнего сигнала, то есть при установке F = 0, генератор поддерживает колебания на адаптированной частоте ( t > 700 на рисунке 1A). Обратите внимание, что не гарантируется, что окончательно достигнутое значение θ точно соответствует θ ext . Напротив, в некоторых случаях могут наблюдаться значительные отклонения (Рисунок 1B). Как оказалось, уменьшение этого отклонения возможно только при более длительном времени адаптации.
Напротив, в некоторых случаях могут наблюдаться значительные отклонения (Рисунок 1B). Как оказалось, уменьшение этого отклонения возможно только при более длительном времени адаптации.
2.1.1. Компромисс между скоростью и точностью
Во многих приложениях, например в роботизированных системах, обычно желательно иметь системы, которые могут быстро адаптироваться к новым ситуациям или обстоятельствам. Напротив, AFO с обычным выбором параметров требуют многих периодов колебаний для завершения заданного процесса адаптации.Время сходимости процесса адаптации, т. Е. Время между началом внешнего сигнала и квазисходимостью частотного параметра θ осциллятора, можно регулировать, манипулируя силой связи Equ в уравнении (1) или обучением коэффициент η в уравнении (2) (рисунок 2). Однако увеличение ϵ или η не только увеличивает скорость адаптации частоты, но также увеличивает общее влияние внешнего сигнала на колебательную систему. В результате изменяется и динамика параметра θ, когда он приближается к квазистабильному состоянию (рисунок 3). С одной стороны, высокие скорости обучения η приводят к повышенным колебаниям параметра θ в окончательно достигнутом состоянии. С другой стороны, более высокие значения ϵ приводят к большему смещению окончательно достигнутого среднего значения θ- от значения θ ext . Следовательно, более короткое время сходимости в стандартных системах AFO идет рука об руку с потерей точности. Естественно, такой компромисс усложняет реальное применение механизма.
С одной стороны, высокие скорости обучения η приводят к повышенным колебаниям параметра θ в окончательно достигнутом состоянии. С другой стороны, более высокие значения ϵ приводят к большему смещению окончательно достигнутого среднего значения θ- от значения θ ext . Следовательно, более короткое время сходимости в стандартных системах AFO идет рука об руку с потерей точности. Естественно, такой компромисс усложняет реальное применение механизма.
Рисунок 2. Влияние силы связи ϵ и скорости обучения η на скорость адаптации стандартных адаптивных генераторов частоты .Желтая заштрихованная область указывает время, в течение которого применяется внешний сигнал. Во всех случаях начальная собственная частота генератора составляет f 0 = 4,0, а частота синусоидального сигнала внешнего блока составляет f ext = 2,0. Для адаптивного осциллятора Хопфа мы выбираем μ = 1.0. Для адаптивного осциллятора Ван-дер-Поля мы выбираем μ = 100,0 (см.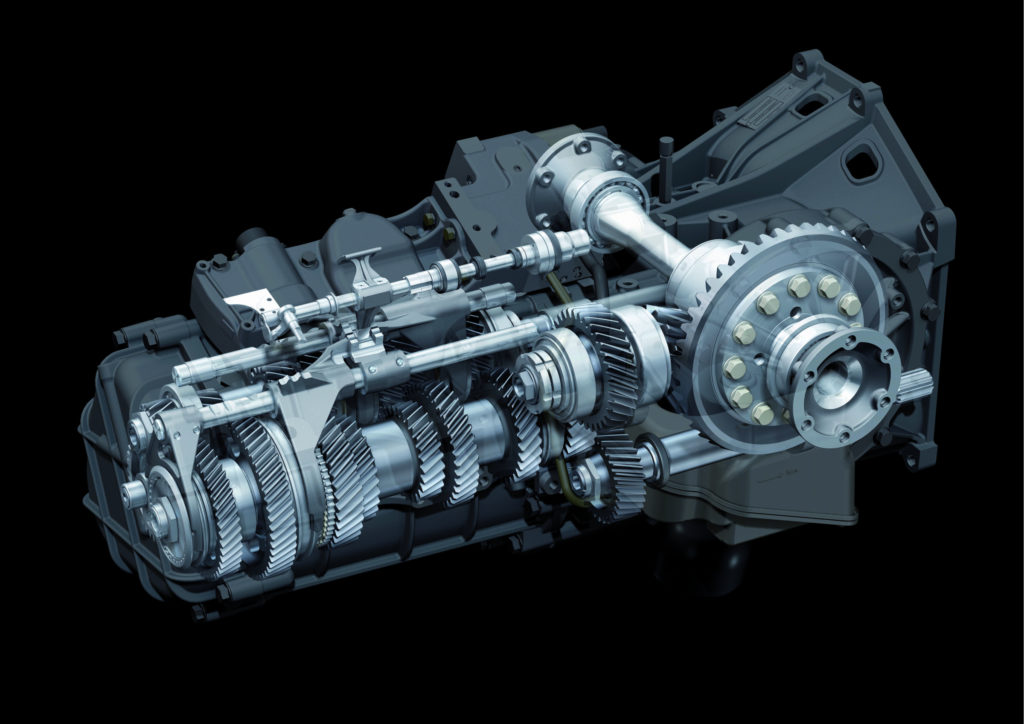 Методы).
Методы).
Рисунок 3. Количественные показатели качества процесса адаптации .Показан временной ход собственной частоты адаптивного генератора частоты во время адаптации к внешнему периодическому сигналу с высокой константой связи ϵ и высокой скоростью обучения η. Желтая заштрихованная область указывает время, в течение которого применяется внешний сигнал. На вставке крупным планом показаны данные в указанной области. Мы вводим три меры для количественной оценки качества данного процесса частотной адаптации. Время сходимости Δ — это интервал времени между началом внешнего сигнала в момент времени t 0 и последним отклонением собственной частоты осциллятора более чем на 5% (оранжевые горизонтальные линии) от окончательно достигнутого среднего значения собственной частоты. частота f-.Сдвиг частоты δ измеряет разницу между конечной средней собственной частотой f- и целевой частотой внешнего сигнала f ext . Чтобы также уловить периодические колебания собственной частоты из среднего значения f-, мы дополнительно вводим конечную флуктуацию частоты σ, заданную стандартным отклонением колебаний собственной частоты f в окончательно достигнутом состоянии (заштрихованная область на вставке светло-красным). Показанный ход собственной частоты во времени взят из адаптивного частотного осциллятора Хопфа с μ = 1.0, ϵ = 5.0, η = 5.0 и f 0 = 2.0, адаптирующегося к синусоидальному сигналу внешнего блока с частотой f доб = 1.0.
Показанный ход собственной частоты во времени взят из адаптивного частотного осциллятора Хопфа с μ = 1.0, ϵ = 5.0, η = 5.0 и f 0 = 2.0, адаптирующегося к синусоидальному сигналу внешнего блока с частотой f доб = 1.0.
2.1.2. Количественные показатели качества адаптации
Для того, чтобы количественно выявить компромисс между скоростью и точностью, мы вводим три показателя, характеризующие качество данного процесса адаптации (рис. 3).Как уже говорилось, во многих приложениях желательна быстрая адаптация. Это фиксируется временем сходимости Δ, которое измеряет интервал времени между началом внешнего сигнала и последним отклонением собственной частоты f системы (определяемой θ) более чем на 5% (10% для Van der Pol) от окончательно достигнутого среднего значения f-. Точность адаптации, в свою очередь, отражается двумя показателями. Во-первых, собственная частота, к которой сходится система, должна быть как можно ближе к частоте внешнего сигнала. Это измеряется смещением частоты δ, которое определяется смещением окончательно достигнутого среднего значения собственной частоты от частоты внешнего сигнала. Во-вторых, колебания собственной частоты вокруг ее среднего значения должны быть низкими, поскольку в противном случае значение собственной частоты при выключении внешнего сигнала зависит от точного момента времени этого события. Величина этих флуктуаций измеряется величиной σ, которая равна стандартному отклонению собственной частоты f в сведенном состоянии.
Чтобы обеспечить интерпретацию этих показателей независимо от выбранных внутренних и внешних частот, мы вводим относительные меры, масштабированные по частоте f ext или длительности цикла fext-1 внешнего сигнала, соответственно: Δ ~ = Δ / fext -1, δ ~ = δ / fext и σ ~ = σ / fext. Кроме того, мы определяем индекс качества Q , объединяющий эти три относительных показателя в одно скалярное значение:
Q = max (1 − Δ˜Δ˜max− | δ˜ | δ˜max − σ˜σ˜max, 0). (3)
(3)Здесь Δ ~ max, δ ~ max и σ ~ max — максимальные значения соответствующих мер, которые мы допускаем для достаточно хорошего процесса адаптации.Соответственно, значение Q , близкое к 1, соответствует очень быстрому, а также очень точному процессу адаптации. Значение Q = 0, напротив, означает, что Δ ~> Δ ~ max, δ ~> δ ~ max, σ ~> σ ~ max или взвешенная сумма (уравнение 3) отдельных показателей больше 1 Далее, если не указано иное, мы используем Δ ~ max = 100, δ ~ max = 0,05 и σ ~ max = 0,05.
2.1.3. Поиск оптимальных параметров
Для простого применения адаптивного осциллятора в данной установке не требуется точной настройки параметров системы для конкретного контекста приложения.Следовательно, необходимо найти систему, которая способна адаптировать свою собственную частоту к широкому диапазону внешних частот без необходимости адаптации каких-либо параметров, кроме параметра, определяющего частоту θ. Однако оказывается, что уже для сравнимого простого случая гармонического осциллятора Хопфа диапазон частот, для которого данный набор параметров допускает быструю и точную адаптацию, очень ограничен (рисунок 4).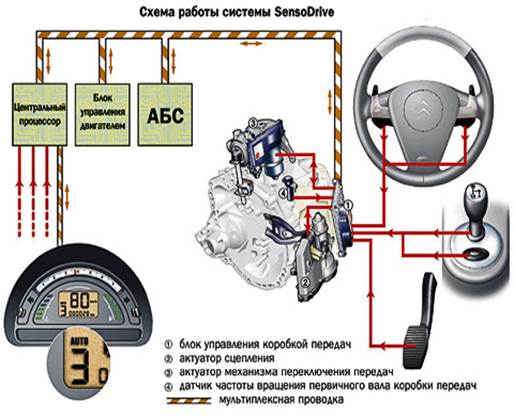 Более высокие значения ϵ и η увеличивают интервалы начальных собственных частот f 0 и внешних частот f ext , для которых достигается быстрая адаптация (левый столбец на рисунке 4).Напротив, небольшие смещения частоты δ ~ достигаются только при малых значениях силы связи ϵ (второй столбец на рисунке 4), а небольшие значения скорости обучения η допускают небольшие колебания, измеренные с помощью σ (третий столбец на рисунке 4). Компиляция этих наблюдений отражается только небольшими интервалами начальных собственных и внешних частот, для которых показатель качества Q достигает ненулевых значений (правый столбец на рисунке 4).
Более высокие значения ϵ и η увеличивают интервалы начальных собственных частот f 0 и внешних частот f ext , для которых достигается быстрая адаптация (левый столбец на рисунке 4).Напротив, небольшие смещения частоты δ ~ достигаются только при малых значениях силы связи ϵ (второй столбец на рисунке 4), а небольшие значения скорости обучения η допускают небольшие колебания, измеренные с помощью σ (третий столбец на рисунке 4). Компиляция этих наблюдений отражается только небольшими интервалами начальных собственных и внешних частот, для которых показатель качества Q достигает ненулевых значений (правый столбец на рисунке 4).
Рисунок 4. Меры качества адаптации адаптивного частотного генератора Хопфа в частотном пространстве ( f 0 , f ext ) для разных значений силы связи strength и скорость обучения η . Для каждой данной пары (, η) -параметров слева направо показаны относительное время сходимости Δ ~, относительный окончательный сдвиг частоты δ ~, окончательная относительная флуктуация частоты σ ~ и комбинированная мера качества Q . в плоскости, охватываемой начальной собственной частотой f 0 и частотой синусоидального сигнала внешнего блока f ext . Поскольку время сходимости определяется как разница во времени между началом внешнего сигнала и последним моментом времени отклонения собственной частоты от окончательного среднего значения более чем на 5%, для высоких значений σ ~ время сходимости не может быть обоснованно определено, т.е.е., принимает очень высокие значения. По той же причине, даже на диагонали f 0 = f ext , высокое время сходимости измеряется для низких значений f ext .
Для каждой данной пары (, η) -параметров слева направо показаны относительное время сходимости Δ ~, относительный окончательный сдвиг частоты δ ~, окончательная относительная флуктуация частоты σ ~ и комбинированная мера качества Q . в плоскости, охватываемой начальной собственной частотой f 0 и частотой синусоидального сигнала внешнего блока f ext . Поскольку время сходимости определяется как разница во времени между началом внешнего сигнала и последним моментом времени отклонения собственной частоты от окончательного среднего значения более чем на 5%, для высоких значений σ ~ время сходимости не может быть обоснованно определено, т.е.е., принимает очень высокие значения. По той же причине, даже на диагонали f 0 = f ext , высокое время сходимости измеряется для низких значений f ext .
Попытка найти параметры, обеспечивающие быструю и точную адаптацию для диапазона начальных собственных и внешних целевых частот, охватывающего два порядка величины, показывает, что на самом деле никакая ϵ-η-комбинация не позволяет получить средний показатель качества адаптации 〈 Q 〉 выше, чем приблизительно 0. 12 (рисунок 5). Делаем вывод, что стандартный AFO с фиксированным набором параметров не способен обеспечить быструю и точную адаптацию в широком диапазоне частот.
12 (рисунок 5). Делаем вывод, что стандартный AFO с фиксированным набором параметров не способен обеспечить быструю и точную адаптацию в широком диапазоне частот.
Рис. 5. Средний комбинированный показатель качества 〈 Q 〉 для различных значений параметров частотно-адаптивного генератора Хопфа . Для каждой пары параметров силы связи ϵ и скорости обучения η средний показатель качества адаптации 〈 Q 〉 в логарифмически дискретизированном пространстве начальных собственных частот f 0 и частот внешнего сигнала f ext отображается (0.1 < f 0 , f ext <10). Красные кружки обозначают четыре случая, показанные на рисунке 4. В каждом случае внешний сигнал представляет собой синусоидальную волну с единичной амплитудой.
2.2. Механизм быстрой динамической связи
Как обсуждалось, никакой пары фиксированных значений для силы связи ϵ и скорости обучения η недостаточно для быстрой и точной адаптации в более широком диапазоне исходных собственных и внешних целевых частот. Чтобы получить систему, не требующую точной настройки для конкретного приложения, уменьшение или увеличение силы связи и скорости обучения должно выполняться самоорганизованным образом.Здесь мы предлагаем такую систему. Вместо подключения внешнего сигнала F ( t ) непосредственно к генератору, мы теперь используем отфильтрованный сигнал P ( t ):
Соответственно, адаптация θ также основана на P ( t ):
θ˙ (t) = ± ηP (t) y (t) x (t) 2 + y (t
Основы выбора коробки передач
STOBER Drives Inc. Опубликовано 25.03.2015
Введение
Выбор коробки передач может быть довольно сложным. Клиенты могут выбирать из множества редукторов, способных удовлетворить самые разные требования. Неправильное решение могло обернуться покупкой более дорогой коробки передач. В отрасли передачи энергии может потребоваться коробка передач, которая будет выдерживать консольные нагрузки, в то время как отрасли управления движением или сервопривода могут потребоваться редуктор, который будет обрабатывать динамическое движение.
В отрасли передачи энергии может потребоваться коробка передач, которая будет выдерживать консольные нагрузки, в то время как отрасли управления движением или сервопривода могут потребоваться редуктор, который будет обрабатывать динамическое движение.
Одна из первых проблемных областей при выборе размеров возникает из-за выбора двигателя по сравнению с размером нагрузки. Подбор двигателя может быть проще, и в результате будет получена работающая коробка передач, но это приведет к покупке коробки передач большего размера, чем необходимо. Эта коробка передач также будет иметь избыточную квалификацию для применения. Тем не менее, выбор размера в зависимости от нагрузки гарантирует, что коробка передач будет соответствовать области применения и будет более экономичной, а также потенциально займет меньшую площадь.
Общие аспекты определения размеров приложений:
Существует несколько аспектов выбора коробки передач, применимых к любой ситуации. В этом разделе будут подробно описаны эти критерии и предложено понимание.
В этом разделе будут подробно описаны эти критерии и предложено понимание.
1. Коэффициент обслуживания
Перед определением размера приложения заказчик должен определить коэффициент обслуживания. Фактор обслуживания можно в целом определить как значение, требуемое для приложения, превышающее номинальное значение устройства. Коэффициент использования следует определять для таких условий, как неравномерная нагрузка, часы работы и повышенная температура окружающей среды.
Как интерпретировать фактор обслуживания? Фактор обслуживания 1.0 означает, что у устройства достаточно мощности для обработки приложения. Дополнительные требования, которые могут привести к перегреву или выходу из строя коробки передач, не допускаются. Для большинства промышленных приложений коэффициент обслуживания 1,4 является достаточным. Этот коэффициент обслуживания означает, что редуктор может справиться с нагрузкой в 1,4 раза больше, чем требуется. Если приложение требует 1000 дюйм-фунтов, редуктор будет рассчитан на 1400 дюйм-фунтов. Различные факторы будут влиять на то, какой коэффициент обслуживания следует использовать в данном приложении.Изменения коэффициента обслуживания зависят от производителя. Ознакомьтесь с техническими характеристиками производителя.
Различные факторы будут влиять на то, какой коэффициент обслуживания следует использовать в данном приложении.Изменения коэффициента обслуживания зависят от производителя. Ознакомьтесь с техническими характеристиками производителя.
2. Температура окружающей среды и окружающая среда
Более высокие температуры окружающей среды увеличивают внутреннее давление, что требует увеличения используемого эксплуатационного фактора. Высокие или низкие температуры могут потребовать различных материалов уплотнения и вязкости смазки.
Условия, в которых будет работать коробка передач, также являются важным фактором при выборе размеров.Суровые условия могут увеличить износ устройства. В пыльных или грязных помещениях часто требуется специальный материал для предотвращения коррозии или роста бактерий. Заводы по производству продуктов питания или напитков требуют специальных покрытий и масел, соответствующих требованиям FDA. Вакуумная среда потребует особых требований к смазке и рассеиванию тепла, так как не будет воздуха для охлаждения. Несоблюдение этих условий окружающей среды может привести к тому, что коробка передач не сможет должным образом поддерживать приложение. Все эти аспекты необходимо учитывать при выборе коробки передач.
Несоблюдение этих условий окружающей среды может привести к тому, что коробка передач не сможет должным образом поддерживать приложение. Все эти аспекты необходимо учитывать при выборе коробки передач.
3. Ударная нагрузка или тип нагрузки
Высокие ударные или ударные нагрузки могут вызвать повышенный износ зубьев шестерен и подшипников вала. Этот износ может вызвать преждевременный выход из строя, если не будет учтен при выборе размера. Эти нагрузки потребуют повышенного эксплуатационного фактора. Равномерные нагрузки — это нагрузки, которые остаются постоянными во время приложения, в то время как неравномерные нагрузки меняются во время приложения. Неравномерные нагрузки, даже если они небольшие, потребуют более высокого эксплуатационного фактора, чем однородные нагрузки.Примером равномерной загрузки может быть конвейер, на котором едет постоянное количество продукта. Неравномерная нагрузка — это любое прерывистое резание. Это прерывистое усилие резания вызывает периодическое увеличение крутящего момента на коробке передач, что является неравномерной нагрузкой.
4. Тип или механизм вывода
Выходные механизмы включают в себя звездочку, шкив или зубчатую шестерню, и это лишь некоторые из них. Различные выходные конфигурации, такие как двойной выходной вал или втулка, установленная на валу, уменьшают расчетную радиальную нагрузку, на которую рассчитан агрегат.Различные выходные механизмы добавляют разные нагрузки на вал, которые необходимо учитывать. Большинство механизмов вызывают высокую радиальную нагрузку, но такие вещи, как косозубая передача, также могут вызывать осевую нагрузку. Для этих выходов могут потребоваться разные подшипники, чтобы учесть повышенную радиальную или осевую нагрузку.
5. Размер выходного вала или полого отверстия
При подборе размеров выходной вал и размер отверстия должны соответствовать требованиям заказчика. Они могут включать в себя выход из нержавеющей стали на блоке, а также вал с шпонкой или без шпонки, полое отверстие под шпонку или без шпонки или фланцевый выход в сочетании с любым из предыдущих.
6. Типы корпуса
Также важно при выборе коробки передач продумать, как она будет крепиться. Устройство может иметь монтажные ножки, фланец на выходе или просто основные резьбовые отверстия с одной или нескольких сторон.Эти стили корпуса могут ограничивать способ монтажа устройства, поэтому наличие множества вариантов может помешать необходимости в нестандартных рамах или кронштейнах. Например, наличие резьбовых отверстий на нижней поверхности устройства предотвратит необходимость установки специального L-образного кронштейна вокруг выхода.
Трансмиссия:
Некоторые элементы, влияющие на процесс калибровки, зависят от отрасли. Для отрасли передачи энергии на расчет приложения влияют выходная частота вращения, мощность двигателя и размер рамы, а также радиальная нагрузка.
Для отрасли передачи энергии на расчет приложения влияют выходная частота вращения, мощность двигателя и размер рамы, а также радиальная нагрузка.
- Обороты на выходе
Заказчик должен определить передаточное число, необходимое для работы коробки передач, или указать входную / выходную скорость и рабочие герцы (Гц) для расчетов. Стандартным является входная частота вращения 1750 об / мин при 60 Гц. Любые изменения необходимо будет указать при выборе размера, так как это изменит расчет соотношения. Отсутствие учета изменений приведет к тому, что коробка передач не будет соответствовать требованиям заказчика.
- Мощность двигателя и размер корпуса
Размер редуктора и вариант входа должны быть определены до расчета коэффициента обслуживания.После того, как редуктор определен, используйте необходимое количество лошадиных сил для расчета фактического коэффициента обслуживания. Двигатели большой мощности выделяют тепло, которое может отрицательно повлиять на механические характеристики редуктора. Этот пониженный рейтинг, основанный на повышенном нагреве, известен как тепловая мощность редуктора и должен учитываться при использовании больших двигателей.
Этот пониженный рейтинг, основанный на повышенном нагреве, известен как тепловая мощность редуктора и должен учитываться при использовании больших двигателей.
- Общая нагрузка на вал
При выборе размера необходимо убедиться, что нагрузка не повредит коробку передач. Сила, измеряемая в фунтах, которую может выдержать выходной вал, известна как номинальная радиальная нагрузка.Если рейтинг меньше, чем приложение, редуктор будет поврежден.
Управление движением:
Для индустрии сервоприводов на процесс определения размеров влияют входная скорость, инерция, динамический крутящий момент, удельные нагрузки на вал и диаметр вала двигателя.
- Скорость на входе
Входная скорость не должна превышать номинальные параметры редуктора, в противном случае произойдет преждевременный износ уплотнения из-за повышенного давления. Скорость ввода может быть случайно увеличена, если есть механизм вывода с соотношением, которое не учитывается при определении размеров, что является еще одной причиной, почему так важно указать какие-либо механизмы вывода.
- Инерция
Несоответствие по инерции менее 10: 1 желательно для точного управления выходом. Это важно для получения высокой точности, необходимой для некоторых приложений. Размер и передаточное число редуктора являются основными факторами, влияющими на инерцию редуктора. Инженеры по контролю могут запросить меньшие несоответствия или даже конкретные количества. Часто двигатель выбирают из-за его динамических возможностей, а не из-за его крутящего момента. Обычно используется двигатель с гораздо большим крутящим моментом, чем необходимо для применения, из-за повышенной инерции ротора.Некоторые производители двигателей даже делают двигатели специально для высоких или низких значений инерции. Это позволяет лучше настроить приложение из-за меньшего несоответствия по инерции. При этом важно ограничить выходной крутящий момент двигателя, чтобы предотвратить поломку коробки передач. - Динамическое движение
Циклическое движение может потребовать использования более высокого коэффициента обслуживания, чем непрерывное движение. Это связано с тем, что постоянные пуски и остановки вызывают дополнительный износ зубьев шестерен и уплотнений.Циклическое реверсирование, которое представляет собой постоянное движение вперед и назад между двумя точками, требует еще более высокого коэффициента обслуживания, чем циклическое или непрерывное.
Это связано с тем, что постоянные пуски и остановки вызывают дополнительный износ зубьев шестерен и уплотнений.Циклическое реверсирование, которое представляет собой постоянное движение вперед и назад между двумя точками, требует еще более высокого коэффициента обслуживания, чем циклическое или непрерывное. - Удельная нагрузка на вал
Радиальные, осевые и моментные нагрузки на валу необходимо сравнивать с номинальными характеристиками агрегата. Невыполнение этого требования может привести к поломке вала или повреждению подшипников или зубьев шестерни. Как правило, к этим параметрам применяется один и тот же коэффициент обслуживания, чтобы определить достаточно прочную коробку передач.Дополнительные типы подшипников могут повысить эти характеристики, если они потребуются для применения. - Диаметр или длина вала двигателя
Вал двигателя должен входить в агрегат, а вал должен быть достаточно длинным для полного зацепления с муфтой. Без полного взаимодействия может произойти проскальзывание входного сигнала. Хотя это не повлияет на необходимый коэффициент обслуживания, это важно учитывать, чтобы избежать проблем при установке двигателя. Некоторые производители имеют конструкцию с большим входом, позволяющую редуктору приспособиться к большему двигателю без увеличения размера агрегата.
Заключение:
Чтобы получить наилучшее решение для коробки передач, покупатели должны рассчитывать размер груза. Это гарантирует, что они получат экономичное решение, соответствующее области применения. Фактор службы, окружающая среда, температура окружающей среды, ударная нагрузка, тип вывода и часы работы — все это важные аспекты для определения размеров. Чем больше информации предоставит заказчик, тем точнее будет процесс определения размеров. В конечном итоге это приведет к решению, которое соответствует требованиям заказчика! Существует множество программ выбора размеров, которые могут помочь определить, какая коробка передач наиболее подходит для вашего применения.
: 3-ступенчатая передняя коробка передач Efneo GTRO
3-ступенчатая коробка передач Efneo GTRO — это простой и надежный способ улучшить диапазон передач вашего велосипеда или избавиться от проблем, связанных с внешним передним переключателем. Если вы не хотите покупать другой велосипед, это может быть экономически эффективным решением ваших холмистых, сильно загруженных или проблем с обслуживанием.
Первое, что нужно сделать с Efneo GTRO, — это цена. Это не дешево. Розничная продажа на своем веб-сайте по цене 499 долларов США (скоро будет назначен дистрибьютор в Великобритании), что составляет около 390 фунтов стерлингов, доставленных в Великобританию.Польская компания Efneo начала свою деятельность несколько лет назад на краудфандинговом сайте Indegogo после того, как команда отцов и сыновей довела идею до стадии прототипа.
> Купите это онлайн здесь
Изготовлением каретки Efneo и деталей для коробки передач занимается Tange Seiki — японская компания, за плечами которой почти сто лет производства прецизионных велосипедных компонентов. Окончательная сборка производится в Польше. Efneo планирует в будущем версию с ременным приводом, которая проходит испытания несколькими производителями.Ременные передачи требуют идеальной цепной линии, поэтому Efneo работает над точным механизмом регулировки цепной линии.
Протестированный до -10 ° C в грязи и снегу, GTRO имеет четыре набора внутренних уплотнений и не требует обслуживания. Тем не менее, вскоре будут доступны запасные части для звездочки из «высококачественной стали» вместе с инструкциями; Обратите внимание, поскольку это сталь, она прослужит дольше по сравнению со звездочкой из сплава.
Efneo «тщательно проверила коробку передач GTRO» с полной нагрузкой 120 кг — гонщик, велосипед и багаж.Его не рекомендуется использовать, скажем, с коммерческим велосипедом, перевозящим эспрессо-машину.
Один для всех
По сути, GTRO дает вам три звезды в одной, без каких-либо проблем, связанных с открытыми передними шестернями. Вы получаете аппаратную переднюю звезду 28 зуб., А также виртуальные передние звезды 40 и 50 зуб., Доступные во время движения или неподвижности при нажатии на рычаг переключения передач.
Что касается веса, то замена тройной цепи средней мощности и переднего переключателя передач на Efneo GTRO почти нейтральна — в любом случае может быть несколько сотен граммов, в зависимости от оборудования, которое вы хотите заменить.Целевой рынок Efneo разработал GTRO для того, чтобы несколько сотен граммов сочли несущественными по сравнению с другими преимуществами, которые приносит закрытая система широкого диапазона.
Продукт, похожий на GTRO, — это любимец европейского рынка горных велосипедов начала нулевых, шатуны SRAM Hammerschmidt. Однако у Hammerschmidt всего два передаточных числа — 1: 1 и 1: 1,6 — и он имеет внушительную цену в 700 долларов вместе с его весом 1,62 кг. У него также довольно сложные требования к установке — поэтому большинство Hammerschmidts устанавливаются производителями велосипедов как неотъемлемая часть конструкции.Система GTRO весит 1,63 кг, поэтому вы получаете более широкий диапазон передач с тремя скоростями за 200 долларов меньше.
Efneo заявляет, что GTRO «не тестировался для соревнований по горному велосипеду, скоростным спускам или грязи», поэтому покупатель будет осторожен, устанавливая его на свой скоростной спуск для этой трассы в Форт-Уильям.
Другой вариант передачи на основе кривошипа — швейцарский (теперь немецкий) привод Schlumpf Drive, при котором вы переключаете передачу, используя пятку, нажимая кнопку в центре передней звезды. При цене более 400 фунтов стерлингов и необходимости фрезерования корпуса BB для установки (много времени и денег), и опять же всего с двумя вариантами передачи, это еще один продукт, который Efneo GTRO, похоже, превзошел как по цене, так и по полезности.
Внутренние выплаты
Все преимущества, очевидные для задних ступиц с внутренним зацеплением, применимы к GTRO: герметичный, защищенный механизм, мгновенное переключение передач в неподвижном состоянии или под нагрузкой, а также постоянная линия цепи, в значительной степени делающая сброшенную цепь делом прошлого. Преимущество возможности выбора нескольких скоростей или увеличения диапазона передач велосипеда, изначально разработанного как односкоростной или с задним редуктором, очевидно. Имейте в виду, что, поскольку GTRO имеет собственное внутреннее колесо свободного хода, вы не можете установить его на велосипед с задним тормозом-подкидным верхом (backpedal) и по-прежнему ожидать остановки.
В коробке вы получаете саму коробку передач с уже прикрепленным переключателем, а также каретку для Efneo. Дизайн явно олдскульный, Efneo выбрала стандартный квадратный кронштейн с резьбой BSA шириной 68 мм (скоро будет доступна версия для горного велосипеда шириной 73 мм). Хотя все это выглядит «стандартным», Efneo BB имеет волнистую шайбу и соответствующую стопорную чашку шайбы на приводной стороне, поэтому вы не можете просто надеть шатуны на имеющийся квадратный конус BB.
Шатуны имеют длину 170 мм и окрашены в серебристый или черный цвет.Бренд и дизайн явно минималистичны, а это означает, что GTRO должен дополнять практически любую раму велосипеда, от прекрасного стального односкоростного автомобиля до универсального голландского грузового гиганта.
Признавая очевидный рынок с низким передаточным числом, GTRO также доступен со 100-миллиметровым нижним кронштейном «толстого велосипеда», а также с переключателем передач с ручным переключением вместо рычага в виде весла.
Для использования на велосипеде без нижних перьев, таком как лежачий, трехколесный велосипед или аналогичный, Efneo выпускает версию с немного другим дизайном.
Также в коробке находится отдельная направляющая для замены, чтобы любой кабель заднего переключателя не попал в механизм «реактивной пластины».
Время установки
Процесс установки — это то, что должен уметь выполнять любой даже с умеренными техническими возможностями и минимальными недорогими инструментами, и любой даже полуприличный веломагазин может сделать это во сне. Если вы можете изменить каретку, вы можете установить GTRO.
Efneo сняла приличное пятиминутное видео, в котором вы пройдете через процесс настройки, с конкретными предупреждениями о шагах, которые необходимо выполнить.В зависимости от конструкции рамы вашего велосипеда вам может потребоваться отрегулировать положение «реактивной пластины» — есть отдельное короткое видео о том, как это сделать.
Рычаг переключения передач крепится к тросу и коробке передач — длина кабеля 113 см регулируется, а на веб-сайте есть видео, объясняющее процесс. Efneo, кажется, хорошо угадал стандартную длину даже для больших размеров кадра. Если вы хотите приспособить GTRO к детскому велосипеду или лежачему предмету, у вас может получиться изрядное количество лишних деталей, требующих обрезки.
Efneo утверждает, что передаточное число GTRO такое же, как и у переднего переключателя Shimano Deore, поэтому, если вы хотите оставить переключатели Shimano влево и вправо (возможно, там, где они интегрированы с тормозными рычагами), это должно быть возможно. Лучше всего сначала связаться с Efneo, чтобы убедиться, что ваша модель переключателя Deore будет работать.
Efneo скоро будет предлагать переключатели на концах руля и подседельных штырей для дуг и ультра-минималистичных установок. Он работает над решением с запрессованной кареткой, но сложность интеграции шпинделя в конструкцию против возврата на рынок резьбовых гильз BB заставляет меня усомниться в необходимости.
Стенды испытательные
Во время обзора я установил GTRO на два велосипеда — первый был гибридом Cube Editor с 11-скоростной задней втулкой Alfine и эксцентриковой кареткой для регулировки натяжения цепи, второй — голландским велосипедом Workcycles FR8 с 3 скоростями. В обоих случаях я столкнулся с одним недостатком конструкции GTRO — внутри линии цепи находится значительное количество коробок передач, которые могут засорять оболочку BB диаметром более 45,6 мм (как для эксцентричной оболочки редактора куба). или нижняя труба большого диаметра (как в Workcycles FR8, где массивная нижняя труба примерно того же диаметра, что и ширина корпуса BB 68 мм).
Думаю, мне здесь сильно не повезло, имея два мотоцикла нестандартного дизайна. Мое решение заключалось в том, чтобы отвести нижнюю часть каретки от привода на несколько миллиметров, используя проставки Shimano freehub. Эти проставки можно приобрести в любом веломагазине за несколько фунтов. У них обычно есть внутренние ключи, чтобы удерживать их на шлицевой втулке, но несколько минут работы с шлифовальным инструментом Dremel закончились набором проставок 1,85 мм, которые идеально подходили к корпусу BB. Где-то в мультивселенной велосипедных «стандартов», уходящих в глубину веков, мне улыбались призрачные фигуры.(Примечание: если у вас нет шлифовального станка Dremel или вы хотите быть более кошерным, прокладки BB размером от 0,3 до 2 мм доступны в Wheels Manufacturing или в приличном магазине велосипедов.)
Для редактора куба потребовалось три проставки (5,55 мм) и два FR8 (3,7 мм). Учитывая глубину резьбы на корпусе BB, меня не беспокоило то, что размещение приводной стороны было плохой идеей; Точно так же я не заметил какого-либо отрицательного воздействия на цепь цепи, даже для двух велосипедов, предназначенных для работы с одинарными передними звездами / звездочками.
В сумку для мелких деталей входят держатели для кабеля, которые аккуратно удерживают кабель под нижней трубкой, а также стяжки для фиксации реакционной пластины. Хотя застежка-молния может показаться неуместной для такого дорогостоящего и высокотехнологичного решения, с учетом множества возможных вариантов установки это разумный компромисс. Итак, вы рассчитываете на время менее 30 минут с необходимыми инструментами.
Работает?
GTRO работает так, как вы и надеетесь: щелчок / поездка.Не нужно думать или беспокоиться о перекрестной цепи, запуске на высокой передаче или застревании на середине хода в неправильном соотношении. От коробки передач нет заметного шума, кроме тихого мурлыканья, и нет заметного дополнительного сопротивления или усилия, необходимого для нажатия педали. Efneo проверил сопротивление при высоких нагрузках и оценил его примерно в 2% — вполне приемлемая потеря в моей книге и наравне с любым другим внутренним механизмом передачи.
Переключение на самую легкую передачу (1: 1) — это нажатие на большой нижний рычаг, ход рычага довольно длинный — конечно, дальше, чем рычаги Shimano или SRAM — но ничего неудобного.Для переключения на более высокие передачи требуется гораздо более короткое нажатие на небольшую верхнюю кнопку — преимущество короткого хода в том, что кнопка может сидеть над кронштейном тормозного рычага и продолжать работать.
Ваша эффективная передача будет зависеть от размера вашей задней ступицы и звездочки, но для моих ступиц Shimano Alfine-11 и Inter-3 низкие передаточные числа были невероятно низкими, а высокие — позволили бы вам выйти на скорость гравитации при достаточно приличном спуске . Выбрав заднюю передачу и используя только GTRO для переключения передач, я обнаружил, что все три передаточных числа являются правильными.Если вы выберете достаточно низкую передачу или заднюю звездочку для преодоления самого опасного уклона, вы должны найти две более высокие передачи, которые предлагает GTRO, чтобы вы не отставали от других покупателей или пассажиров.
> Боретесь на холмах? Как получить пониженные передачи
Что подводит нас к сути Efneo: стоит ли тратить 400 фунтов стерлингов на дополнительные или более удобные механизмы?
Для двух моих семейных случаев использования Efneo GTRO определенно облегчил жизнь и добавил полезности нашим велосипедам. Наш детский велосипед для буксировки в парк — это гибрид Cube Editor + Shimano Alfine-11.Даже с заводской установкой Alfine с широким диапазоном 405%, передняя звезда 45 зубьев дает самую низкую передачу, которая все еще слишком высока, чтобы с комфортом вытащить мальчика на велосипеде по изрядным склонам в нашей деревне.
Установка коробки передач GTRO на редактор значительно упростила буксировку нашего сына (подумайте о скорости ходьбы при 70 оборотах в минуту), и без детей я мог разогнаться до 36 миль в час при сидячем положении 80 оборотов в минуту. Теоретически, на моей максимальной скорости ноги 120 об / мин я бы разогнался до 54 миль в час, но я не думаю, что на юге Англии есть холм, достаточно длинный или крутой, чтобы позволить разбег, необходимый для получения гибрида с приводом от моих ног. с такой скоростью.Конечно, я мог бы выбрать меньшую переднюю звезду, чем стандартный 45T Alfine, но тогда высококачественная передача заметно упала бы, уменьшая удовольствие от взрыва домой со станции или пробежки по пабу с попутным ветром.
Второй вариант использования, и я думаю, что GTRO теперь останется, — это наш голландский велосипед Workcycles FR8. Мы с женой используем его для поездок в местные магазины с огромными корзинами и иногда с вышеупомянутым ребенком на борту. Поездка за границу — это крутой спуск, а неизбежно загруженный обратный путь — определенно нет.
Со стандартной 3-скоростной втулкой Shimano Inter-3, 25 кг (без нагрузки) FR8 было проблемой для моей жены, чтобы вернуться домой, но когда она была оснащена коробкой передач GTRO, он стал (по ее словам): «круто — мы сохраняем это! » FR8 построен как резервуар, рассчитанный на весь срок службы и требующий почти нулевого обслуживания, но он весит как резервуар. Мы купили его подержанным и теперь считаем, что дополнительные затраты в размере 400 фунтов стерлингов на расширение зубчатой передачи будут потрачены очень хорошо. Это, конечно, несложное оценочное суждение о велосипеде, где единственный другой вариант — добавить 11-скоростную втулку (250 фунтов стерлингов), встроить ее в существующее колесо (100 фунтов стерлингов) и повозиться с передаточные числа цепочки (еще больше времени / денег), но в конечном итоге вы получите спред, близкий к доступному при использовании GTRO.
И это при условии, что ваша рама подходила для втулки Alfine и была настроена для управления торможением и переключением передач. Прелесть GTRO заключается в том, что на самом деле не имеет значения, из чего состоит задняя часть вашего велосипеда — односкоростной, с внутренним редуктором или звездочки и механизм — GTRO расширит диапазон передач для всех, обеспечивая при этом низкие эксплуатационные расходы и преимущества статического переключения. . Одна вещь, которую GTRO не может сделать, — это ездить на велосипеде с фиксированной передачей, так как передняя звезда движется вперед, так что вы теряете любое преимущество торможения.
Реальные результаты
Глядя на цифры, мы получаем следующие реальные эффекты: объединение GTRO с 3-скоростной втулкой Shimano обычного или садового назначения, звездочкой 19 зуб. И вращением педалей со скоростью 80 об / мин на самой низкой передаче, вы будете справляться со скоростью. 6,8 миль / ч. Завершите его до самого высокого комбо, и вы будете честно лететь со скоростью 22,6 миль в час — с семью из девяти возможных комбинаций, достаточно различных, чтобы быть полезными вариантами.
Сравнивая это с топовой установкой Alfine-11 и передним кольцом 40T, вы получаете диапазон от 7 до 28 миль в час для той же частоты вращения педалей — так что наверняка более высокий верхний предел, но насколько полезны эти дополнительные 6 миль в час для большинство приложений, в которых рукоятка Efneo будет считаться подходящей?
Другой возможный вариант использования — это электровелосипед с задним расположением двигателя, где GTRO позволит вам помогать двигателю в моменты низкой скорости / высокого крутящего момента, тем самым сохраняя срок службы батареи и увеличивая запас хода.
Вы можете вычислять числа, пока коровы не вернутся домой, но что мы знаем из реальных тестов деревенских покупок на холмах и перевозки детей, так это то, что добавление коробки передач Efneo GTRO к нашему любимому голландскому байку сделало его намного более управляемым и, следовательно, больше полезно и приятно.
Тролль в сети подбрасывает ряд сообщений от счастливых клиентов Efneo, которые установили коробку передач на лежачие, трехколесные, грузовые и толстые велосипеды, а также на многие другие модели двухколесного транспорта. Все комментарии перекликаются с нашими собственными выводами — коробка передач Efneo GTRO Gearbox — это хорошо продуманный и надежный вариант для улучшения вашего мотоцикла во многих отношениях.Если ваш вариант использования диктуется, вы не будете разочарованы.
Вердикт
Если вам нужны шестерни с большим шагом во внутреннем пакете, не требующем технического обслуживания, это золотой стандарт
Если вы думаете о покупке этого продукта с помощью кэшбэка, почему бы не использовать страницу road.cc Top Cashback и получить лучший кэшбэк, поддерживая ваш любимый независимый сайт о велосипедах
Марка и модель: Efneo GTRO 3-ступенчатая передняя коробка передач
Испытанный размер: 28 т [+40/50], длина кабеля 113 см
Расскажите, для чего предназначен этот продукт и для кого он предназначен.Что об этом говорят производители? Как это соотносится с вашими собственными чувствами по этому поводу?
Это для тех, кто хочет получить более широкие, более низкие или высокие передачи для любого двух- или трехколесного транспорта.
Эфнео говорит:
Коробка передач GTRO
Вы похожи на большинство людей, которым действительно не нравятся все хлопоты и проблемы, связанные с передним переключателем? Теперь у вас есть альтернатива. 3-ступенчатая передняя коробка передач GTRO от Efneo идеально подходит для треккинговых, гибридных, городских, односкоростных, городских и складных велосипедов, а также для внедорожных велосипедов, не предназначенных для соревнований, и электровелосипедов.
Преимущества для вас:
Легко заводится с первой передачи: с Efneo вы можете переключиться на первую передачу на остановке — как в автомобиле — и легко начать движение на 1-й передаче.
Немедленное переключение передач: намного быстрее и проще, чем с передним переключателем. Переключайте передачу при нажатии на педали и в состоянии покоя.
Отсутствие перекоса цепи: отсутствие перекоса цепи и падения цепи в паре с задним переключателем.
Простота установки: самый простой в установке передний редуктор.Никаких модификаций рамы не требуется. Нет необходимости в точной настройке переключателя.
Снижение затрат на техническое обслуживание: нет необходимости в утомительных, сложных настройках.
Расскажите подробнее о технических аспектах продукта?
Efneo перечисляет эти функции:
Технические характеристики
Применение: Коробка передач GTRO от Efneo предназначена для всех велосипедов, не предназначенных для соревнований, таких как туристические, городские, электронные, складные, лежачие и трехколесные. Он прошел интенсивные испытания в различных условиях (дорожные, внедорожные и лабораторные, в том числе зимние).Однако он не был протестирован для использования в соревнованиях по горному велосипеду, скоростным спускам или грязи.
Передаточное число: 1-я передача GTRO — нейтральная передача (1: 1). Вторая и третья передачи — инкрементальные. Стандартная передняя звезда GTRO — 28 зуб.
Передаточное число Эквивалент зубьев для 28 зуб.
1-я 1: 1 28 зуб. (Физический размер передней звезды)
2-я 1: 1,43 40 зуб. (Физический размер звезды)
3-й 1: 1,79 50 зуб. (Физический размер передней звезды)
Интерфейс: Коробка передач GTRO совместима с большинством велосипедных рам, использующих стандартные квадратные конические 4-х ленточные BB с корпусами BB шириной 68 мм или 100 мм, с английской резьбой.Диаметр оболочки ББ не может превышать 45,6 мм.
Переключение передач: Коробка передач GTRO Efneo поставляется со специальным триггером или ручкой переключения передач.
Совместимость с задней трансмиссией: Совместимость с любой задней трансмиссией (переключатель, ступица с редуктором, односкоростная ступица, задний двигатель), кроме фиксированного колеса. Для ступицы с внутренним зубчатым колесом, пожалуйста, проверьте спецификации производителя для наименьшей допустимой передней звезды.
Оцените товар за качество строительства:
9/10
Все кажется хорошо спроектированным и герметичным.
Оцените товар за производительность:
9/10
Он делает то, что написано на банке, и делает это очень хорошо.
Оцените долговечность продукта:
9/10
За два месяца катания он не пропустил ни одной детали.
Оцените вес продукта (если применимо)
5/10
В значительной степени соответствует более дорогим альтернативам более низкого уровня.
Оцените комфортность товара (если применимо)
8/10
Нет проблем с тем, как это влияет на педалирование; нет проблем с рычагом большого пальца, как проверено.
Оцените ценность продукта:
8/10
Это большие деньги, но если они продлят срок службы или полезность вашего велосипеда …?
Расскажите, как в целом продукт работал при использовании по прямому назначению
Не могу придраться — он просто работает, и работает хорошо.
Расскажите, что вам особенно понравилось в товаре
Простота установки, но это уникально. В основном подбадривание и улучшенная полезность.
Расскажите, что вам особенно не понравилось в данном товаре
Ничего особенного. Обнаруженные проблемы с BB принадлежали мне лично, и дизайн позволял их обойти.
Понравилось ли вам пользоваться продуктом? Есть
Вы бы подумали о покупке этого продукта? Есть
Вы бы порекомендовали этот продукт другу? Есть
Используйте это поле, чтобы указать свой результат
По сравнению с альтернативными вариантами передней коробки передач Efneo GTRO выигрывает по цене, удобству и простоте.Несмотря на цену и незначительные нюансы, связанные с зазором BB и длиной кабеля, это отличное решение.
Возраст: 43 Рост: 183 см Вес: 72 кг
Я обычно катаюсь: Merida Ride 5000 Disc Мой лучший велосипед:
Я катаюсь: Более 20 лет Катаюсь: Несколько раз в неделю Я бы назвал себя: Эксперт
Регулярно занимаюсь следующими видами катания: велокросс, клубные аттракционы, фитнес-езда, катание на горных велосипедах, голландский велосипедный спорт
China запускает роботизированную миссию по доставке лунных камней на Землю, впервые за более чем 40 лет — RT World News
Космическое агентство Пекина приступило к осуществлению проекта по сбору камней с поверхности Луны с помощью роботизированного корабля и их доставке на Землю — подвиг, совершенный всего двумя другими странами, и последняя попытка была предпринята почти 50 лет назад.
Миссия Chang’e-5 Китайского национального космического управления (CNSA) стартовала с космодрома Вэньчан в предрассветный запуск в понедельник, в результате чего был запущен усовершенствованный роботизированный корабль и его ракета-носитель Long March-5 — самая большая из такой в Китае — на Луну курсом. Если все пойдет без сучка и задоринки, корабль должен собрать космические камни с рябого спутника и отправить их домой к середине декабря.
ПРОЧИТАЙТЕ БОЛЬШЕ: Нет темной стороны Луны: Европа Юпитера светится в темноте, давая ключ к разгадке того, что лежит под ледяной поверхностью
Помимо сбора лунных материалов, чтобы помочь ученым понять происхождение и историю Луны, миссия также проверит китайскую робототехнику, используя дистанционно управляемый аппарат для захвата и хранения образцов горных пород для подготовки к более сложным задачам.
«Это то, в чем китайская космическая программа очень хороша», — сказал Verge Эндрю Джонс, журналист, внимательно следящий за космической программой Китая.
Они устанавливают дополнительные цели и задачи, основываются на достигнутом и ставят более амбициозные цели.
Если миссия будет успешной, Китай станет третьей страной наряду с США и Советским Союзом, собравшей материалы с поверхности Луны, что в последний раз было выполнено миссией СССР «Луна 24» в 1976 году.
При весе около 18 100 фунтов (8 200 кг) космический корабль, как ожидается, выйдет на орбиту вокруг Луны 28 ноября и в течение дня или двух, вероятно, отправит спускаемый аппарат и восходящий аппарат в ранее неизведанное место на поверхность, сообщает Space.com. Однако точные сроки неясны, поскольку официальные лица в Пекине скрывают некоторые детали миссии.
После достижения твердой земли робот проведет один лунный день — примерно две недели на Земле — собирая около четырех фунтов лунных камней, почвы и пыли, надеясь избежать «экстремальных ночных температур, которые могут повредить электронику», согласно Клайв Нил, геолог из Университета Нотр-Дам в Индиане.
Перед возвращением домой ценный груз будет загружен на подъемный корабль, который затем встретится с основным транспортным средством, ожидающим на орбите, как сообщил координатор исследований Европейского космического агентства (ЕКА) Джампес Карпентер «Хорошая репетиция будущих исследований человека». Для Китая это может означать отработку пилотируемого полета на Луну, назначенного на 2030 год.
Также на rt.com Космические силы США предусматривают защиту активов частного сектора, заявляя, что угрозы из России и Китая требуют боевой позицииБольшинство образцов будет храниться в Национальной астрономической обсерватории Китая при Китайской академии наук в Пекине, хотя пока неясно, будут ли какие-либо образцы отправлены исследователям за границу.Американское космическое агентство НАСА, однако, призвало Пекин поделиться своими данными с «глобальным научным сообществом», , в то время как ЕКА объявило о запуске с нетерпением, отметив, что будет отслеживать китайский корабль с помощью своей сети Estrack.