Ошибка
- Автомобиль — модели, марки
- Устройство автомобиля
- Ремонт и обслуживание
- Тюнинг
- Аксессуары и оборудование
- Компоненты
- Безопасность
- Физика процесса
- Новичкам в помощь
- Приглашение
- Официоз (компании)
- Пригородные маршруты
- Персоны
- Наши люди
- ТЮВ
- Эмблемы
- А
- Б
- В
- Г
- Д
- Е
- Ё
- Ж
- З
- И
- Й
- К
- Л
- М
- Н
- О
- П
- Р
- С
- Т
- У
- Ф
- Х
- Ц
- Ч
- Ш
- Щ
- Ъ
- Ы
- Ь
- Э
- Ю
- Я
Навигация
- Заглавная страница
- Сообщество
- Текущие события
- Свежие правки
- Случайная статья
- Справка
Личные инструменты
- Представиться системе
Инструменты
- Спецстраницы
Пространства имён
- Служебная страница
Просмотры
Перейти к: навигация, поиск
Запрашиваемое название страницы неправильно, пусто, либо неправильно указано межъязыковое или интервики название. Возможно, в названии используются недопустимые символы.
Возможно, в названии используются недопустимые символы.
Возврат к странице Заглавная страница.
Если Вы обнаружили ошибку или хотите дополнить статью, выделите ту часть текста статьи, которая нуждается в редакции, и нажмите Ctrl+Enter. Далее следуйте простой инструкции.
Архив Приложение к журналу Ключевые слова Пароль ВХОД регистрация Другие журналы
| Обоснование параметров конструкции рулевого привода задних управляемых колес трехосных машин # 07, июль 2012 DOI: 10.  7463/0712.0544251 Файл статьи:
Мурог_2_P.pdf
(426.50Кб) 7463/0712.0544251 Файл статьи:
Мурог_2_P.pdf
(426.50Кб)автор: Мурог И. А. УДК. 629.33 Россия, ФГБОУ ВПО «ЮУрГУ» (НИУ)
Рулевой привод обеспечивает кинематическую связь управляемых колес автомобиля между собой и с управляющим устройством. Одним из важных требований, предъявляемых к рулевым приводам, являются кинематические связи между колесами, рациональные с точки зрения управляемости, устойчивости и маневренности [1]. Особенное значение имеет требования обеспечения устойчивости движения для рулевых приводов автомобилей с передними и задними управляемыми колесами, наличие которых определяет существенные особенности динамики автомобиля. Кроме того, конструкция рулевого привода должна быть согласована с конструкцией подвески автомобиля, обладать высоким КПД, достаточной жесткостью, эффективно демпфировать возникающие колебания [2]. На основе проведенных ранее исследований установлено, что для устранения недостатков, присущих транспортным средствам с передними и задними управляемыми колесами (УК) необходимо, чтобы угловая скорость поворота задних колес была меньше угловой скорости поворота автомобиля, и боковая реакция на задней оси не меняла свой знак.
1 Определение соотношения угловой скорости поворота задних управляемых колес и угловой скорости автомобиля
Для обеспечения необходимого соотношения угловой скорости поворота задних управляемых колес и угловой скорости автомобиля для изменения угла поворота задних колес примем зависимость , (1) где а, b, с – постоянные коэффициенты, при этом с < 0, b > 0; x– угол поворота передних колес; y– угол поворота задних колес; е – основание натуральных логарифмов. График, описываемый зависимостью (1), в общем виде представлен на рисунке 1. Для реализации зависимости изменения угла поворота задних колес, близкой по характеру к запаздыванию относительно передних, точка перегиба должна находиться на уровне значения угла запаздывания. Для обеспечения кинематического согласования при максимальных углах поворота управляемых колес вторая производная в точке экстремума (точка b) зависимости должна быть равна нулю, а значение функции должно быть равно максимальному углу поворота передних управляемых колес.
Рисунок 1 – Соотношение углов (рад) поворота управляемых колес
Таким образом, для нахождения значений коэффициентов а, b и с необходимо решение системы уравнений
где значения коэффициентов q и p определяются из выражений
Решая полученную систему уравнений, получим формулы (3), (6), (7) для расчета значений коэффициентов b, c и a в зависимости от максимального угла поворота передних колес и угла запаздывания, выбираемого для конкретного автомобиля. Численные значения коэффициентов для угла запаздывания Өα = 0,07 рад и максимального угла поворота управляемых колес Өlmax 0,3 рад равны: а = 383,6; b = 2,55; с = -13,5. При использовании зависимостей (1)…(7), возможен расчет значения угла поворота задних управляемых колес в зависимости от передних колес при различных значениях максимальных углов поворота передних управляемых колес (УК) и для запаздывания поворота задних колес от передних.
2 Анализ влияния чувствительности автомобиля к повороту рулевого колеса на максимальную скорость движения
Изменение чувствительности к повороту рулевого колеса для автомобиля, имеющего рулевой привод с запаздыванием, при изменении передаточного числа рулевого механизма особенно заметно на малых скоростях движения. При увеличении скорости эта разница постепенно уменьшается и при увеличении передаточного числа с 25 до 27 на скорости движения 17 м/с чувствительность автомобиля к повороту рулевого колеса практически не изменяется. При использовании в рулевом управлении привода с переменным передаточным числом уменьшение передаточного числа рулевого механизма вызывает увеличение чувствительности автомобиля к повороту рулевого колеса в рассматриваемом диапазоне изменения скоростей движения автомобиля. При использовании в рулевом приводе устройства запаздывания, максимальная скорость выполнения маневра при минимальном передаточном числе рулевого механизма, равном 17, выше, чем для рулевого привода с переменным передаточным числом (14 м/с и 12 м/с соответственно). Необходимо также отметить, что значения максимальной скорости, полученной для рулевого привода с устройством запаздывания при выполнении маневра «рывок руля», получены благодаря малому углу поворота задних УК в заданных условиях. Кроме того, данный маневр позволяет оценить главным образом, устойчивость движения автомобиля.
3 Схема рулевого управления транспортного средства с передними и задними управляемыми колесами
На рисунке 2 представлена схема рулевого управления транспортного средства с передними и задними управляемыми колесами [4]. Рулевое управление транспортного средства с передними и задними управляемыми колесами содержит рулевое колесо 3, кинематически связанное через рулевой механизм 2 с корпусом распределителя 4, золотник которого кинематически связан с исполнительным цилиндром 1. рулевым приводом передних управляемых колес и с кривошипами мальтийского механизма 9. Механизм 9 кинематически связан с корпусом распределителя 7 задних управляемых колес, золотник которого связан с исполнительным гидроцилиндром 6 и рулевым приводом задних управляемых колес.
1 – цилиндр; 2 – рулевой механизм; 3 – рулевое колесо; 4 – распределитель передних управляемых колес; 5 – насос; 6 – гидроцилиндр; 7 – распределитель задних управляемых колес; 9 – мальтийский механизм; 10 – фильтр; 11 — бак
Рисунок 2 – Рулевое управление с передними и задними управляемыми колесами
Рулевое управление работает следующим образом. При отсутствии управляющих воздействий на рулевое колесо и прямолинейном движении транспортного средства золотники распределителей 4 и 7 находятся в нейтральном положении, сообщая напорные магистрали насоса 5 со сливом. Фиксация креста мальтийского механизма 9 в неподвижном положении при отсутствии управляющих воздействий осуществляется запирающими дугами. При повороте рулевого колеса 3 управляющее воздействие передается через рулевой механизм 2 распределителю 4, смещая его корпус относительно золотника, открывая доступ рабочей жидкости, закачиваемой из бака 11 насосом 5 к рабочим полостям гидроцилиндра 1. Одна из полостей гидроцилиндра 1 сообщается с напорной магистралью насоса, другая со сливом, в результате чего перемещается шток гидроцилиндра 1, вызывая поворот передних управляемых колес, перемещение золотника распределителя 4 и кривошипов механизма 9. Цевка одного из кривошипов (в зависимости от направления поворота) входит в зацепление с крестом механизма 9, вызывая его поворот относительно своей оси, что ведет к смещению корпуса распределителя 7 относительно его золотника, открывая доступ рабочей жидкости, к рабочим полостям гидроцилиндра б. Одна из полостей гидроцилиндра 6 сообщается с напорной магистралью насоса, другая – со сливом, в результате чего перемещается шток гидроцилиндра 6, вызывая поворот задних управляемых колес и перемещение золотника распределителя 7, обеспечивая обратную связь по перемещению.
Выводы
Применение механического рулевого привода, реализующего предложенный закон регулирования угловой скорости поворота задних управляемых колес, позволяет повысить критическую скорость выполнения маневра «рывок руля». Предложенный рулевой привод с переменным передаточным числом обеспечивает более высокую чувствительность к повороту рулевого колеса при небольших углах его поворота. Плавное изменение чувствительности рулевого управления при повороте рулевого колеса и более высокая жесткость привода обеспечивают лучшие эргономические характеристики рулевого привода с переменным передаточным числом.
Список литературы
1. Аксенов П.В. Многоосные автомобили: теория общих конструктивных решений. М.: Машиностроение, 1980. 207 с. 2. Гладов Г.И., Вихров А.В., Зайцев С.В., Кувшинов В.В., Павлов В.В. Конструкции многоцелевых гусеничных и колесных машин: учебник для студ. 3. Проектирование полноприводных колесных машин: учебник для вузов. В 3 т. Т. 3 / Б.А. Афанасьев, Б.Н. Белоусов, Л.Ф. Жеглов и др.; под ред. А.А. Полунгяна. М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. 432 с. 4. Мурог И.А., Трач С.И. Рулевое управление транспортного средства с передними и задними управляемыми колесами: пат. № 2160205 РФ. 2001. Поделиться: |
| ||||||||||||||||||
| ||||||||||||||||||||




 высших учеб. заведений / под ред. Г.И. Гладова. М.: Издательский центр «Академия», 2010. 400 с.
высших учеб. заведений / под ред. Г.И. Гладова. М.: Издательский центр «Академия», 2010. 400 с. 05.2022
05.2022Тесла может внедрить электронное управление в следующем году
Кевин Армстронг
Рулевое колесо Tesla в Model S
Tesla
Развитие систем управления по проводам или электропривода быстро делает традиционное рулевое колесо устаревшим. Эти системы устраняют прямую механическую связь между рулевым колесом и шинами, вместо этого посылая сигналы для управления.
Это достижение было в поле зрения Tesla в течение некоторого времени, и известный наблюдатель за Tesla полагает, что они представят его в своих Model S и Model X в 2023 году.
Крис Чжэн, у которого есть представление о цепочке поставок Tesla, теперь считает, что Tesla, возможно, хочет внедрить электронное управление в Model S и Model X. Он написал в Твиттере: «Похоже, Tesla получит электронное управление в 2023 году, по крайней мере, в Model S». /ИКС? Рассмотрим их рулевое колесо Yoke.
Электронное управление
Рулевое колесо было представлено вместе с новой моделью S летом 2021 года. Хотя оно имеет уникальный внешний вид и может повысить крутость автомобиля, многие наблюдатели не были поклонниками этого колеса. Форма не позволяет управлять рулем вручную, и это может привести к полному скрещиванию рук водителя на крутых поворотах.
Хотя оно имеет уникальный внешний вид и может повысить крутость автомобиля, многие наблюдатели не были поклонниками этого колеса. Форма не позволяет управлять рулем вручную, и это может привести к полному скрещиванию рук водителя на крутых поворотах.
Тем не менее, эта конструкция была бы идеальной для системы управления по проводам, и это, возможно, было планом Теслы все время.
Электронная система управления по сравнению с традиционной механической системой
Илон Маск ответил на критику ига, обратившись к системе привода по проводам. В твите от 17 июня 2021 года он написал в Твиттере: Я некоторое время езжу с игом, и это здорово, имхо. Прогрессивное рулевое управление потребует сложной передачи или электропривода без прямой механической связи. Буду стремиться к этому через несколько лет.
Многое произошло с тех пор, как был опубликован этот твит. Конкуренция в секторе электромобилей значительно возросла, и Toyota, которая отстает на рынке электромобилей, первой получила электропривод. Система появилась на рендерах позже в 2021 году и теперь используется в Toyota bZ4x 2022 года и Lexus RZ450e 2023 года. Конечно, это сдвинуло цель Маска «несколько лет» на год или два.
Система появилась на рендерах позже в 2021 году и теперь используется в Toyota bZ4x 2022 года и Lexus RZ450e 2023 года. Конечно, это сдвинуло цель Маска «несколько лет» на год или два.
Преимущества электронного управления
Есть много причин, по которым Telsa наращивает производство электроуправления. Во-первых, компания постоянно ищет способы уменьшить количество деталей в автомобиле и, следовательно, сократить время производства. Снятие рулевой колонки, которая соединяется с универсальным шарниром перед тем, как перейти к реечной системе, сэкономило бы время изготовления.
Во-вторых, электронное управление обеспечивает гораздо более плавное движение, поскольку рулевое колесо больше не связано с чем-то, что находится на дороге. Колесо не вибрировало и не тянуло на неровных поверхностях, что делало управление автомобилем более безопасным для многих водителей, особенно для людей с ограниченными возможностями или пожилых людей.
Наконец, усовершенствованная система реагирует на несколько переменных для получения точного передаточного числа рулевого управления. Это означает, что если вы выполняете крутой поворот на низкой скорости, например, на стоянке, вам не придется так сильно вращать руль; на самом деле, это полностью устранило бы ручное управление.
Это означает, что если вы выполняете крутой поворот на низкой скорости, например, на стоянке, вам не придется так сильно вращать руль; на самом деле, это полностью устранило бы ручное управление.
Несмотря на то, что колесо в форме бугеля не было удачным для начала, оно идеально подходит для системы электронного управления. В связи с усилением конкуренции на рынке электромобилей Tesla обязательно внедрит эту инновационную технологию раньше, чем позже.
Обсудите эту историю на нашем форуме
Леннон Цихак
Полностью автономное вождение Tesla наконец-то будет обновлено до версии 11
MKBHD/Twitter
По словам генерального директора Tesla Илона Маска, 11-я бета-версия Tesla FSD ожидается на следующей неделе. Это произошло через несколько дней после того, как Tesla начала выпускать FSD Beta 10.69..3.3.
Откровенный генеральный директор ответил на комментарий от аккаунта владельцев Tesla в Силиконовой долине с вопросом о выпуске FSD Beta версии 11. На что Маск ответил: «На следующей неделе».
На что Маск ответил: «На следующей неделе».
Автомобильная компания из Остина постепенно начала развертывать бета-версию FSD v11 для избранных сотрудников, но теперь, по слухам, она является частью праздничного обновления Tesla. Обновление, которое, возможно, является одним из крупнейших на сегодняшний день для Tesla, изобилует захватывающими функциями, такими как интеграция Steam и Apple Music, новые медиа-карты и элементы управления, и, надеюсь, единый стек для полной бета-версии для самостоятельного вождения.
Ожидается, что объединение движения по шоссе и городу в один стек значительно улучшит использование автопилота на шоссе. В технологии единый стек означает использование одних и тех же технологий для нескольких приложений вместо использования отдельных технологий для разных функций или услуг. Применение гораздо более совершенной новейшей бета-технологии FSD к вождению по шоссе позволит Tesla объединить все данные, собранные во время вождения по городу, и применить их к своей функции «Навигация на автопилоте».
Эта интеграция между всеми технологиями Tesla, вероятно, будет означать более плавное слияние, смену полосы движения и повороты на шоссе. Ожидается, что визуальные эффекты вождения по городу будут применяться и к вождению по шоссе.
Одна из последних сборок FSD Beta v11 была замечена в прошлом месяце, и недавно просочились примечания к выпуску, показывающие, что эта новая бета-версия фактически объединит движение по шоссе и городу. Этой единственной внутренней версией была версия 2022.40.5, и ожидается, что она не станет общедоступной сборкой.
Объединение бета-версии FSD и рабочих обновлений
Когда на следующей неделе бета-версия FSD v11 выйдет для бета-тестеров, ожидается, что она станет частью праздничного обновления, а это означает, что бета-версия FSD и обычные рабочие сборки будут наконец объединены, и бета-тестеры больше не останутся на отдельном пути.
Для владельцев, которые не участвуют в бета-версии FSD, это означает, что они, наконец, получат доступ к бета-версии FSD, просто включив опцию в автомобиле. FSD Beta больше не будет отдельной версией или обновлением.
FSD Beta больше не будет отдельной версией или обновлением.
Для существующих бета-тестеров это также будет иметь большое значение. Бета-тестеры теперь будут в курсе последних обновлений и функций, и им не придется ждать месяцев между обновлениями.
Один стек Теслы ожидался еще этим летом, но сроки, указанные Илоном, вероятно, были чрезмерно оптимистичными.
Но теперь, когда он расширяется примерно через неделю, ожидание почти закончилось. И мы, вероятно, увидим серьезные улучшения в навигации на автопилоте и FSD в 2023 году и далее, особенно с учетом того, что Tesla готовится добавить радар HD в следующем месяце, анонс аппаратного обеспечения 4 и обновленную модель 3 2023 года.
Мы ожидаем, что 2023 год станет важным годом для Tesla.
Подписаться
Подписаться
Кевин Армстронг
Tesla добавила мини-плеер в Model 3 и Model Y
Teslamaniacs
Праздничное обновление Tesla, а именно обновление 2022. 44.25.1, переполнено вкусностями, многие из которых требуют второго взгляда. Есть существенные изменения для владельцев Model 3 и Model Y. Кроме того, некоторые функции, которые водители используют для повседневной работы, изменили расположение, размер и функциональность.
44.25.1, переполнено вкусностями, многие из которых требуют второго взгляда. Есть существенные изменения для владельцев Model 3 и Model Y. Кроме того, некоторые функции, которые водители используют для повседневной работы, изменили расположение, размер и функциональность.
Музыкальный плеер
К этому может потребоваться некоторое время, чтобы привыкнуть. Теперь есть новый мини-плеер, который разделяет музыкальную область на две части. Меньший модуль для управления мультимедиа находится в левом нижнем углу экрана. Это позволяет наиболее часто используемым кнопкам быть ближе к водителю.
Пользователи могут провести пальцем вверх по мини-медиаплееру, чтобы открыть источники, включая Apple Music, Spotify, Bluetooth и т. д. После выбора источника в правой части экрана открываются подробные сведения, чтобы пользователи могли выбирать песни или плейлисты.
Мини-медиаплеер также позволяет пользователям прокручивать до последних, а избранное, настройки и функцию поиска также можно найти в этом маленьком, перенастроенном плеере. Мини-плеер автоматически свернется через несколько секунд, если оставить его развернутым.
Мини-плеер автоматически свернется через несколько секунд, если оставить его развернутым.
Кроме того, Tesla вновь представила карты, которые можно найти, проведя пальцем по медиаплееру в левом нижнем углу. Карты позволяют просматривать одометр, счетчик пройденного пути и давление в шинах. Вы можете увидеть новые карты пользовательского интерфейса в действии, которые мы подробно рассмотрели ранее на этой неделе.
Наличие медиаплеера в центре
Однако медиаплеер все еще можно вернуть на прежнее место. Если вы предпочитаете, чтобы медиаплеер располагался ближе к центру экрана, в верхней части экрана выбора песни вы можете свернуть мини-плеер, и элементы управления мультимедиа автоматически отобразятся в центре.
Если вы просматриваете давление в шинах или одометр в новых карточках пользовательского интерфейса, медиаплеер также вернется в центральную область.
Интерфейс навигации
Тесла улучшил расположение навигационной информации
Тесламаньяки
Tesla переработала макет пользовательского интерфейса (UI) навигации, что улучшило размещение направлений, таких как следующий поворот и другие доступные параметры. Tesla разделила навигационный интерфейс на две части. В верхней части экрана будет отображаться важная информация о маршруте, в том числе направления следующего поворота.
Tesla разделила навигационный интерфейс на две части. В верхней части экрана будет отображаться важная информация о маршруте, в том числе направления следующего поворота.
Остальная информация, ранее находившаяся в верхней части экрана, перемещается вниз. Эти сведения включают время в пути, сведения о пункте назначения и варианты изменения или отмены навигации.
Оба этих модуля можно расширить, чтобы показать больше информации. Например, смахивание вниз по верхнему модулю покажет дополнительные повороты на вашем маршруте, а смахивание вверх по нижнему модулю или нажатие трех точек отобразит дополнительные параметры маршрута, такие как добавление остановки или изменение настроек навигации.
Ваше текущее местоположение/город также немного изменилось. Раньше он располагался внизу по центру экрана, но теперь он немного смещен и находится в дальнем углу дисплея.
Элементы управления вентилятором
Теперь вы можете нажать, чтобы изменить скорость вентилятора и остаться в автоматическом режиме
Teslamaniacs
Когда ваша климатическая система настроена на автоматический режим, Tesla теперь использует скорость вращения вентилятора «LO», «MED» и «HI» вместо предыдущей шкалы от 1 до 10. Ползунок теперь исчез и заменен кнопками для уменьшения или увеличения скорости вращения вентилятора.
Ползунок теперь исчез и заменен кнопками для уменьшения или увеличения скорости вращения вентилятора.
Tesla больше не будет автоматически отключать автоматический климат, когда вы регулируете интенсивность вентилятора. Даже при изменении скорости вентилятора система HVAC останется в автоматическом режиме.
Ручной режим
Вы по-прежнему можете использовать скорости вентилятора 1-10 в ручном режиме
Walgermo/Twitter
Если вы отключите Auto в своей климатической системе, у вас все равно будет детальный доступ к элементам управления скоростью вентилятора со старой шкалой от 1 до 10. Теперь у вас также есть возможность коснуться или использовать ползунок для регулировки скорости вращения вентилятора. Новый ползунок появится над разделом климата, или вы можете нажимать стрелки, чтобы отрегулировать скорость вентилятора, как в режиме «Авто».
HomeLink
Tesla усовершенствовала пользовательский интерфейс HomeLink
Walgermo/Twitter
Tesla также внесла улучшения в HomeLink. Когда вы находитесь рядом с домом, значок HomeLink теперь будет отображаться в строке состояния в верхней части экрана с кнопкой «Активировать» или «Отмена».
Когда вы находитесь рядом с домом, значок HomeLink теперь будет отображаться в строке состояния в верхней части экрана с кнопкой «Активировать» или «Отмена».
Выпадающий список HomeLink автоматически исчезнет, если вы включите передачу заднего хода, но возможность активировать дверь гаража останется.
Кроме того, если у вас включено автоматическое открытие или автоматическое закрытие, в строке состояния теперь будет отображаться количество футов или метров до открытия или закрытия двери гаража.
Видео об обновлениях пользовательского интерфейса
В последнем обновлении есть еще много дополнений и изменений, но они больше всего повлияют на пользователя. Владельцы Tesla обычно любят водить машину и привыкли видеть информацию, отображаемую одинаково в точном месте на экране. Поэтому не забудьте дать себе немного дополнительного времени, чтобы ознакомиться с новым макетом.
Поэтому не забудьте дать себе немного дополнительного времени, чтобы ознакомиться с новым макетом.
Обсудите эту историю на нашем форуме
Подписаться
Подпишитесь на нашу еженедельную рассылку новостей.
Хотя мы публикуем официальные примечания к выпуску Tesla, мы не связаны с Tesla Motors. Мы поклонники и сторонники Tesla.
Усовершенствованная адаптация рулевого управления и привода модифицированных игрушечных машинок для улучшения управления направлением движения у очень маленьких детей с тяжелыми множественными нарушениями развития
Введение
Развитие самостоятельного исследования играет решающую роль в развитии , эмоциональные и сенсомоторные способности у типично развивающихся детей (1). В частности, по мере того, как ребенок исследует окружающую среду и взаимодействует с ней посредством целенаправленной, самостоятельной локомоции, обучение ускоряется, а понимание социальных и пространственных отношений улучшается (2–4). Benson и Užgiris (2) продемонстрировали, что младенцы, которые искали спрятанный предмет с помощью самостоятельной локомоции, находили его чаще, чем младенцы, которых пассивно транспортировали в места поиска, предполагая, что существует связь между самостоятельной независимой мобильностью и обучением пространственному восприятию и Память. Эта концепция особенно важна при разработке технологий, расширяющих возможности детей с тяжелыми формами инвалидности участвовать в жизнедеятельности за счет самостоятельной силовой мобильности.
Benson и Užgiris (2) продемонстрировали, что младенцы, которые искали спрятанный предмет с помощью самостоятельной локомоции, находили его чаще, чем младенцы, которых пассивно транспортировали в места поиска, предполагая, что существует связь между самостоятельной независимой мобильностью и обучением пространственному восприятию и Память. Эта концепция особенно важна при разработке технологий, расширяющих возможности детей с тяжелыми формами инвалидности участвовать в жизнедеятельности за счет самостоятельной силовой мобильности.
Дети с отклонениями в развитии часто имеют сопутствующие физические нарушения, которые приводят к ограниченному самостоятельному исследованию окружающей их среды (5, 6). Эта ограниченная самостоятельная независимая мобильность и исследование окружающей среды ограничивают обучение и социальное участие, что, как показали исследования, может привести к циклу снижения любопытства, социальной изоляции, депрессии и «выученной беспомощности» (7, 8). Кроме того, исследования показали, что дети с ограниченной самостоятельной мобильностью реже участвуют в жизненных ситуациях, что приводит к более низкому качеству жизни (9). , 10).
, 10).
Устройства силовой мобильности (PMD), предоставляемые маленьким детям с двигательными нарушениями, предотвращают некоторые из этих негативных последствий, не вызывая ухудшения существующих двигательных навыков и не препятствуя развитию новых (11–15). Несмотря на эти зарегистрированные положительные эффекты, PMD обычно не рекомендуется для детей в возрасте до 3 лет (16–18). Хотя существует множество факторов, влияющих на использование силовой мобильности, таких как социальная стигматизация традиционных устройств механизированной мобильности и взгляды родителей/врачей/социума на инвалидность, наиболее распространенная причина, о которой сообщается в ходе опроса лиц, назначающих силовую мобильность, не рекомендует ПМД для маленьких детей. с ограниченными возможностями не было документации об успешном испытании силовой мобильности, требуемой источниками финансирования (18). Это особенно верно для детей, нуждающихся в расширенном опыте, таких как дети с когнитивными нарушениями в дополнение к сенсомоторным нарушениям (18).
Одним из новых вариантов устройства мобильности с электроприводом (PMD), получившим признание в качестве средства для рентабельного испытания мобильности с электроприводом для маленьких детей, является модифицированный игрушечный автомобиль с питанием от батареи (19). Многие группы на национальном и международном уровнях модифицировали игрушечные машинки с питанием от батареи, добавляя опору для сидения и большой кнопочный переключатель, расположенный в центре, для активации двигателя. Эти адаптированные игрушки для катания эффективны для обучения причинно-следственным связям, но ограничены в том, что они позволяют детям контролировать направление и скорость/ускорение движения (20). Пропорциональный джойстик представляет собой систему управления активацией, позволяющую осуществлять направленное движение с регулированием скорости. Исследование, проведенное с участием детей со значительными когнитивными и физическими нарушениями, показало, что способность понимать причинно-следственные связи при использовании джойстика для перемещения кресла-коляски с электроприводом развивается в более раннем возрасте, чем понимание того, что нажатие одного переключателя вызывает активацию движений кресла-коляски (21).
Традиционно дети с тяжелыми физическими и когнитивными нарушениями исключаются из рекомендаций по силовой мобильности (22). Если у ребенка были дополнительные сенсорные нарушения, такие как зрительные, это исключение усиливалось (22). Однако исследования показали, что эти дети также способны управлять силовыми мобильными устройствами. Nilsson и Nyberg сообщили об исследовании двух детей с глубокими когнитивными нарушениями и дополнительными зрительными и двигательными нарушениями, которые обучались с использованием инвалидной коляски с электроприводом, управляемой джойстиком (23). Этим детям было 4 и 5 лет, и оба смогли продемонстрировать преднамеренную активацию джойстика, проведя длительное время в инвалидных колясках с электроприводом.
Сообщалось, что только 40% клиницистов имеют доступ к инвалидным коляскам с электроприводом напрокат для необходимого расширенного практического опыта (18). Кроме того, доступный и постоянный доступ к пробному PMD имеет решающее значение для детей с тяжелыми физическими, зрительными и когнитивными нарушениями, чтобы приобрести основные навыки, необходимые для финансирования утверждения инвалидной коляски с электроприводом. Модифицированные игрушечные машинки могут стать промежуточным решением для преодоления этих барьеров и предоставить этим детям критически важные возможности для экспериментов. Цель этого технического отчета состоит в том, чтобы (1) описать новые экономически эффективные модификации активации джойстика пропорционального управления и рулевого управления, сделанные для модифицированных игрушечных машинок с питанием от батареи, и (2) предоставить доказательства того, что очень маленькие дети с тяжелыми множественными нарушениями развития могут научиться использовать эту усовершенствованную технологию.
Модифицированные игрушечные машинки могут стать промежуточным решением для преодоления этих барьеров и предоставить этим детям критически важные возможности для экспериментов. Цель этого технического отчета состоит в том, чтобы (1) описать новые экономически эффективные модификации активации джойстика пропорционального управления и рулевого управления, сделанные для модифицированных игрушечных машинок с питанием от батареи, и (2) предоставить доказательства того, что очень маленькие дети с тяжелыми множественными нарушениями развития могут научиться использовать эту усовершенствованную технологию.
Методы
Участниками этой серии клинических случаев были семь детей в возрасте до пяти лет со сложными тяжелыми формами инвалидности. Местные детские физиотерапевты, работающие в реабилитационных амбулаторных учреждениях, программах раннего вмешательства и системах государственных школ, определили, что эти дети нуждаются в доступе к расширенному испытанию с PMD, чтобы оценить их потенциал для обучения использованию инвалидной коляски с электроприводом. Все дети имели первичный диагноз детский церебральный паралич, выраженные когнитивные нарушения и были невербальными. Способность человека следовать указаниям и понимать «причинно-следственные» связи представлены в таблице 1. Их уровни по классификации общей двигательной функции (GMFCS) варьировались от III до V. У шести детей был плохой контроль над верхними конечностями, а у четырех — корковая зрительная нарушения.
Все дети имели первичный диагноз детский церебральный паралич, выраженные когнитивные нарушения и были невербальными. Способность человека следовать указаниям и понимать «причинно-следственные» связи представлены в таблице 1. Их уровни по классификации общей двигательной функции (GMFCS) варьировались от III до V. У шести детей был плохой контроль над верхними конечностями, а у четырех — корковая зрительная нарушения.
Таблица 1 . Характеристики участников и данные скрининга.
У каждого ребенка было два визита в течение 3 месяцев. Во время первого визита были получены все необходимые формы и согласия в соответствии с утвержденным Институциональным наблюдательным советом (IRB № 6980116-11). Также проводилась оценка, аналогичная той, что проводилась при назначении системы сидения для инвалидной коляски. Поездка на игрушечных машинках была разработана и изготовлена специально для каждого ребенка с учетом целей родителей, терапевта и потребностей ребенка. Второй визит был посвящен доставке модифицированной игрушки для катания и семейному обучению/инструктажу.
Второй визит был посвящен доставке модифицированной игрушки для катания и семейному обучению/инструктажу.
Модификации
Были выбраны и модифицированы коммерчески доступные игрушечные машинки с питанием от 12-вольтовой батареи от Best Choice Products (Тастин, Калифорния). Большинство детей/семей, которые получили эти модифицированные игрушки для катания, просили, чтобы они хорошо себя чувствовали на открытом воздухе в штате Флорида, США (например, в травянистой местности). Следовательно, игрушки для катания на 12 В были выбраны вместо 6-В из-за их большего размера и мощности, что позволяет им работать в помещении и на улице, а также на многих участках. Модификации были разделены на две категории, которые касались физиологических, анатомических соображений и соображений безопасности: (1) посадка и механическая поддержка (туловище, верхние/нижние конечности, шея/голова) и (2) механизмы управления и активации (электрическое переключение и система привода).
Сиденья
Обычные модификации сидений и механических опор включали приподнятые спинки сидений, подголовники, нагрудные ремни, тазовые ремни, тазовый поясной ремень и боковые опоры туловища. Простые в обращении, безопасные и готовые материалы обычно используются для обеспечения экономической жизнеспособности этих приспособлений. Предпочтительные материалы состояли из трубы из поливинилхлорида (ПВХ) сортамента 40 (диаметром 1 дюйм) для поддержки рамы и лапши для бассейна, пенопластовых прокладок или неопреновой резины для прокладки.
Простые в обращении, безопасные и готовые материалы обычно используются для обеспечения экономической жизнеспособности этих приспособлений. Предпочтительные материалы состояли из трубы из поливинилхлорида (ПВХ) сортамента 40 (диаметром 1 дюйм) для поддержки рамы и лапши для бассейна, пенопластовых прокладок или неопреновой резины для прокладки.
Адаптация рулевого управления и привода
Модификации рулевого управления для улучшенного управления модифицированными игрушками для катания были основаны на изменениях в рулевой колонке и внедрении микроконтроллера Arduino (Somerville, MA) и Sabertooth (Dimension Engineering, Hudson, ОН) контроллер двигателя (рис. 1). Микроконтроллер был запрограммирован на получение сигнала от джойстика и передачу желаемого действия на контроллер двигателя, который, в свою очередь, подает на двигатели необходимое напряжение (M 1 и М 2 ). Кроме того, у Arduino было много других периферийных устройств ввода-вывода, которые позволяли активировать сенсорные действия, помогающие ребенку увлечься игрушкой, такие как свет и музыка.
Рисунок 1 . Блок-схема схемы, включая джойстик, микроконтроллер, контроллер двигателя и двигатели (M1 и M2).
Для этих двух двигателей можно использовать два подхода. Один состоит из использования M1 в качестве приводного двигателя (т. е. вперед и назад) и M2 в качестве рулевого двигателя (влево/вправо). Второй подход, используемый в этой рукописи, состоит в использовании комбинации обоих двигателей для одновременного управления приводом и рулевым управлением. Это было достигнуто за счет настройки системы заднего привода, при которой M1 управляет левым колесом, а M2 — правым колесом. Передние шины райдера заменены на ролики. Механизм активации представлял собой пропорциональный джойстик управления, который позволял управлять автомобилем в любом направлении с достаточной точностью, чтобы выполнить трехточечный поворот на расстоянии 6 футов. Если бы оба двигателя приводились в действие одинаково, езда на велосипеде двигалась бы вперед/назад. Если бы они срабатывали неравномерно, например М1 вкл.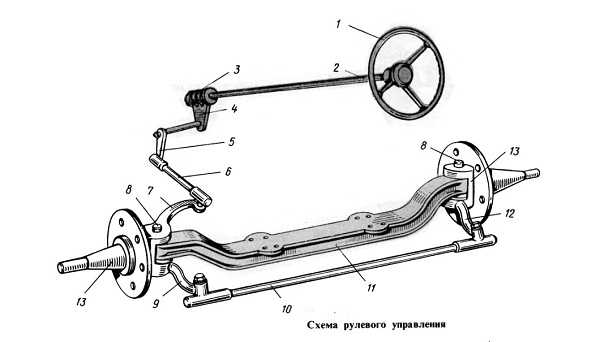 и М2 выкл., то райдер включился бы. Кроме того, использование микроконтроллера Arduino с возможностью ограничения максимальной скорости движения и добавления функции линейного изменения, которая позволит избежать быстрых внезапных или резких движений после активации двигателей. Каждая поездка также была запрограммирована с помощью выключателя дистанционного останова с отменой родительского контроля для экстренной остановки. Пример этих механических и электрических модификаций игрушечной машинки для катания показан на рисунке 2. Сводная информация о модификациях сидений и рулевого управления для каждой из машинок для катания представлена в таблице 2. Следует отметить, что механические и электрические представленные адаптации доступны для энтузиастов-самоучек (DIY) с минимальными инженерными навыками. Тем не менее, лица, заинтересованные в такой адаптации, должны быть знакомы с механическими инструментами и процессами (например, электроинструментами для резки и сверления), электрическими инструментами и процессами (например, пайкой, выбором калибра проводов) и программированием с использованием Arduino Integrated Development с открытым исходным кодом.
и М2 выкл., то райдер включился бы. Кроме того, использование микроконтроллера Arduino с возможностью ограничения максимальной скорости движения и добавления функции линейного изменения, которая позволит избежать быстрых внезапных или резких движений после активации двигателей. Каждая поездка также была запрограммирована с помощью выключателя дистанционного останова с отменой родительского контроля для экстренной остановки. Пример этих механических и электрических модификаций игрушечной машинки для катания показан на рисунке 2. Сводная информация о модификациях сидений и рулевого управления для каждой из машинок для катания представлена в таблице 2. Следует отметить, что механические и электрические представленные адаптации доступны для энтузиастов-самоучек (DIY) с минимальными инженерными навыками. Тем не менее, лица, заинтересованные в такой адаптации, должны быть знакомы с механическими инструментами и процессами (например, электроинструментами для резки и сверления), электрическими инструментами и процессами (например, пайкой, выбором калибра проводов) и программированием с использованием Arduino Integrated Development с открытым исходным кодом. Среда (IDE).
Среда (IDE).
Рисунок 2 . Модифицированный игрушечный автомобиль с сиденьем, джойстиком и колесиками.
Таблица 2 . Описание модификаций сидений и рулевого управления для каждого участника.
Безопасность
Важно отметить, что все модификации, описанные в этой рукописи, прошли двойной процесс для обеспечения безопасности. Во-первых, инженер-эксперт провел проверку безопасности, которая проводилась в соответствии со стандартным контрольным перечнем, утвержденным Институциональным наблюдательным советом. Контрольный список включал визуальные осмотры механических и электрических модификаций райдера и эксплуатационную проверку с 40 фунтами на постоянной скорости в течение 10 минут.
Во-вторых, семьям были предоставлены письменные инструкции по уходу, технике безопасности и эксплуатации, а также индивидуальное обучение в этих областях. Семьи продемонстрировали использование и регулировку привязных ремней, ремней и правильное положение своего ребенка в автомобиле, а также процедуры зарядки аккумулятора и работу аварийного выключателя дистанционного останова, прежде чем игрушки для катания были предоставлены для домашнего использования.
Обучение
Каждый ребенок обучался следующим образом: после того, как он сел в машину, ему кратко продемонстрировали «причинно-следственную» связь между джойстиком и движением автомобиля. Простые словесные метки из одного слова использовались в сочетании с тактильными указаниями, например, иди, стой и толкай. После того, как джойстик был продемонстрирован, ребенку была предоставлена возможность случайного, свободного исследования джойстика, двигательной активации и последующего движения автомобиля без дополнительных инструкций взрослого.
Результаты
За участниками наблюдали в течение всего времени их первоначального опыта в их модифицированной игрушечной машине с электроприводом. Первоначальный опыт длился менее часа для каждого ребенка. Все семеро детей смогли активировать модифицированную машину для катания и ощутить последующее движение. Их активация стала преднамеренной и самоинициированной. Участники активируют машину, останавливаются и затем повторяют активацию. Одно интересное наблюдение с использованием джойстика заключалось в том, что все дети сначала тянули джойстик к себе, что инициировало движение назад, прежде чем научиться нажимать на джойстик, чтобы двигать машину вперед.
Одно интересное наблюдение с использованием джойстика заключалось в том, что все дети сначала тянули джойстик к себе, что инициировало движение назад, прежде чем научиться нажимать на джойстик, чтобы двигать машину вперед.
Последующий телефонный звонок семьям состоялся через 3 месяца после первого визита. Опекуны сообщили, что все дети все еще использовали свои PMD. Устройства использовались для игр с другими детьми в помещении и на улице, для участия в семейных прогулках, а также для вовлечения других детей в школу и на детских площадках. Единственная механическая/электрическая неисправность PMD, о которой сообщалось, была связана с тем, что батарея не заряжалась.
Обсуждение
В этом техническом отчете о серии случаев представлены модифицированные игрушки для катания с направленным управлением и программируемой скоростью запуска и движения с помощью джойстика, а также способность детей с тяжелыми множественными нарушениями развития в возрасте до 5 лет управлять ими. Наблюдательные результаты этого исследования согласуются с другими исследованиями, в которых изучалась способность детей старшего возраста с множественными комплексными нарушениями обучаться использованию джойстика для перемещения инвалидной коляски с электроприводом (24–27). В исследовании Нильссона исследователи отметили, что участники демонстрировали прогрессивные модели поведения при обучении использованию джойстика (23). Эти шаблоны были разделены на 8 фаз или уровней формирования навыков использования джойстика. Фаза 1 показала, что ребенок не осознает использование джойстика для передвижения, а фаза 8 — функциональное использование кресла-коляски с электроприводом (23). Фаза 4 описывается как преднамеренная активация джойстика, чередующаяся с самостоятельными стартами и остановками движения (25).
Наблюдательные результаты этого исследования согласуются с другими исследованиями, в которых изучалась способность детей старшего возраста с множественными комплексными нарушениями обучаться использованию джойстика для перемещения инвалидной коляски с электроприводом (24–27). В исследовании Нильссона исследователи отметили, что участники демонстрировали прогрессивные модели поведения при обучении использованию джойстика (23). Эти шаблоны были разделены на 8 фаз или уровней формирования навыков использования джойстика. Фаза 1 показала, что ребенок не осознает использование джойстика для передвижения, а фаза 8 — функциональное использование кресла-коляски с электроприводом (23). Фаза 4 описывается как преднамеренная активация джойстика, чередующаяся с самостоятельными стартами и остановками движения (25).
В исследовании Нильссона дети с такими же сложными нарушениями, как и участники этого исследования, оценивались на этапе 1 по завершении их первоначального опыта (23). Все семеро детей в этом исследовании достигли фазы 4 во время своего первоначального опыта. Одним из объяснений этой разницы в фазовых уровнях использования джойстика после начального опыта в этих двух группах может быть средний возраст участников. Средний возраст в этом исследовании составил 3,7 года по сравнению со средним возрастом 11 лет в исследовании Нильссона (23). Возможно, изучение современных теорий сенсомоторного развития могло бы дать какое-то объяснение этому различию.
Одним из объяснений этой разницы в фазовых уровнях использования джойстика после начального опыта в этих двух группах может быть средний возраст участников. Средний возраст в этом исследовании составил 3,7 года по сравнению со средним возрастом 11 лет в исследовании Нильссона (23). Возможно, изучение современных теорий сенсомоторного развития могло бы дать какое-то объяснение этому различию.
Например, теория динамических систем и более поздняя теория выбора нейронной группы предполагают, что мозг проходит через критический период развития, который служит основой для будущей когнитивной и сенсомоторной функции (28, 29). Этот критический период наступает в возрасте до трех лет (29 лет). Таким образом, возможности самостоятельных сенсомоторных взаимодействий с окружающей средой в очень раннем возрасте поддерживают оптимальное моторное обучение (29). Это может объяснить более высокий уровень использования джойстика, достигнутый с начальным опытом у детей младшего возраста в текущем исследовании.
Клинические последствия
Одним из экономичных способов предоставления возможности изучения причинно-следственных связей при подготовке к началу использования силовой мобильности детьми со сложными множественными нарушениями является предоставление модифицированных игрушечных машинок, как ранее сообщалось в литературе (20). Наблюдательный случай, представленный в этой рукописи, предполагает, что замена типичного кнопочного переключателя активации пропорциональным джойстиком для обеспечения более легкой устойчивой активации и управления направлением может оказаться эффективным и экономичным решением, обеспечивающим увеличенное время практики для обучения независимому, самостоятельному управлению. подвижность силы для очень маленьких детей. Общая средняя стоимость адаптации джойстика на PMD, представленную в этой рукописи, составила ~ 540,00 долларов США на PMD. Сюда входит средняя стоимость игрушки для катания, купленной в 2018 году (250 долларов), контроллера двигателя Sabertooth со скидкой дилера (85 долларов, 120 долларов без дилерской скидки), Arduino UNO (18 долларов за комплект из 2 единиц) и около 200 долларов на расходные материалы, такие как пенопласт, ПВХ, болты и т. д. В стоимость не включены механические и ручные инструменты, применяемые для модификации игрушек-каталок. Эта сумма значительно меньше, чем средняя стоимость инвалидной коляски с электроприводом и джойстиком с регулируемой скоростью в размере 7 132 долларов США, о которой сообщают Rentschler et al. (30).
д. В стоимость не включены механические и ручные инструменты, применяемые для модификации игрушек-каталок. Эта сумма значительно меньше, чем средняя стоимость инвалидной коляски с электроприводом и джойстиком с регулируемой скоростью в размере 7 132 долларов США, о которой сообщают Rentschler et al. (30).
Наблюдения в текущем исследовании, хотя и подтверждают предыдущие исследования, предлагают новую информацию для оценки кандидата на силовую мобильность. Дети в возрасте 5 лет и младше с тяжелыми и глубокими комплексными нарушениями на ранних уровнях развития могли самостоятельно инициировать движение с помощью интерфейса джойстика за короткий период времени путем свободного исследования без специальной подготовки. Все семеро детей участвуют в продолжающемся расследовании, чтобы определить, приводит ли длительная практика в игрушечных машинках, модифицированных с помощью джойстика, к приобретению навыков, которые соответствовали бы традиционным оценкам готовности к инвалидной коляске с электроприводом.
Заявление о доступности данных
Все наборы данных, созданные для этого исследования, включены в статью/дополнительный материал.
Заявление об этике
Исследования с участием людей были рассмотрены и одобрены Советом по институциональному обзору (IRB) Университета Северной Флориды IRB № 6980116-11: Влияние игрушек с использованием технологий на самостоятельную функцию и качество жизни детей дошкольного возраста с ограниченными возможностями. Письменное информированное согласие на участие в этом исследовании было предоставлено законным опекуном/ближайшим родственником участников.
Вклад автора
Компания JA выполнила механические и электрические модификации и провела все испытания на безопасность. ML выполнили и проанализировали данные от всех детей. JA и ML написали и отредактировали рукопись. Все авторы внесли свой вклад в статью и одобрили представленную версию.
Финансирование
Эта работа была частично поддержана Национальным институтом здравоохранения (NICHD, 1R25HD087971-01).
Конфликт интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Ссылки
1. Кампос Дж.Дж., Андерсон Д.И., Барбу-Рот М.А., Хаббард Э.М., Хертенштейн М.Дж., Уитерингтон Д. Путешествия расширяют кругозор. Детство. (2000) 1:149–219. doi: 10.1207/S15327078IN0102_1
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
2. Benson JB, Užgiris IC. Влияние самостоятельной локомоции на поисковую активность младенцев. Dev Psychol. (1985) 21:923–31. doi: 10.1037/0012-1649.21.6.923
CrossRef Полный текст | Академия Google
3. Кермоян Р., Кампос Дж.Дж. Локомоторный опыт: посредник пространственного когнитивного развития. Детская разработка. (1988) 59:908–17. doi: 10.2307/1130258
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
4. Ян Дж. Х., Томас Дж. Р., Даунинг Дж. Х. Передвижение улучшает пространственный поиск детей: метааналитический обзор. Перцептивные моторные навыки. (1998) 87:67–82. doi: 10.2466/pms.1998.87.1.67
Ян Дж. Х., Томас Дж. Р., Даунинг Дж. Х. Передвижение улучшает пространственный поиск детей: метааналитический обзор. Перцептивные моторные навыки. (1998) 87:67–82. doi: 10.2466/pms.1998.87.1.67
PubMed Abstract | Полный текст перекрестной ссылки | Академия Google
5. Beckung E, Hagberg G. Нейроповреждения, ограничения активности и ограничения участия у детей с церебральным параличом. Dev Med Детский нейрол. (2002) 44:309–16. doi: 10.1111/j.1469-8749.2002.tb00816.x
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
6. Адольфссон М., Мальмквист Дж., Плесс М., Гранульд М. Идентификация детского функционирования с точки зрения МКФ-ДП: повседневные жизненные ситуации, изученные в мерах участия. Реабилитация инвалидов. (2011) 33:1230–44. doi: 10.3109/09638288.2010.526163
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
7. Майер С.Ф., Селигман М.Е. Выученная беспомощность: теория и доказательства. J Общий психологический опыт. (1976) 105:3–46. doi: 10.1037/0096-3445.105.1.3
J Общий психологический опыт. (1976) 105:3–46. doi: 10.1037/0096-3445.105.1.3
Полный текст CrossRef | Google Scholar
8. Батлер С. Влияние механизированной мобильности на самостоятельное поведение очень маленьких детей с нарушениями опорно-двигательного аппарата. Dev Med Детский нейрол. (1986) 28:325–32. doi: 10.1111/j.1469-8749.1986.tb03881.x
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
9. Williams G, Willmott C. Более высокий уровень мобильности связан с более широким участием в жизни общества и лучшим качеством жизни. Черепно-мозговая травма. (2012) 26:1065–71. doi: 10.3109/02699052.2012.667586
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
10. Филд Д.А., Ливингстон Р.В. Развитие навыков силовой подвижности у детей и подростков: систематический обзор мер и их клиническое применение. Dev Med Детская неврология. (2018) 60:997–1011. doi: 10.1111/dmcn.13709
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
11. Джонс М.А., Макьюэн И.Р., Неас Б.Р. Влияние электрических инвалидных колясок на развитие и функции детей раннего возраста с тяжелыми двигательными нарушениями. Pediatr Phys Ther. (2012) 24:131–40. doi: 10.1097/PEP.0b013e31824c5fdc
Джонс М.А., Макьюэн И.Р., Неас Б.Р. Влияние электрических инвалидных колясок на развитие и функции детей раннего возраста с тяжелыми двигательными нарушениями. Pediatr Phys Ther. (2012) 24:131–40. doi: 10.1097/PEP.0b013e31824c5fdc
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
12. Rosen L, Arva J, Furumasu J, Harris M, Lange ML, McCarthy E, et al. Позиция РЕСНА по применению электрических инвалидных колясок для детей. Ассистент техн. (2009) 21:218–26. doi: 10.1080/10400430
6076
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
13. Логан С.В., Фельднер Х.А., Галлоуэй Дж.С., Хуан Х.Х. Модифицированное использование автомобиля для катания детьми со сложными медицинскими потребностями. Pediatr Phys Ther. (2016) 28:100–7. doi: 10.1097/PEP.0000000000000210
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
14. Хуан Х-х, Чен Ю-М, Хуан Х-В. Обучение езде на автомобиле для поведенческих изменений в мобильности и социализации среди маленьких детей с ограниченными возможностями.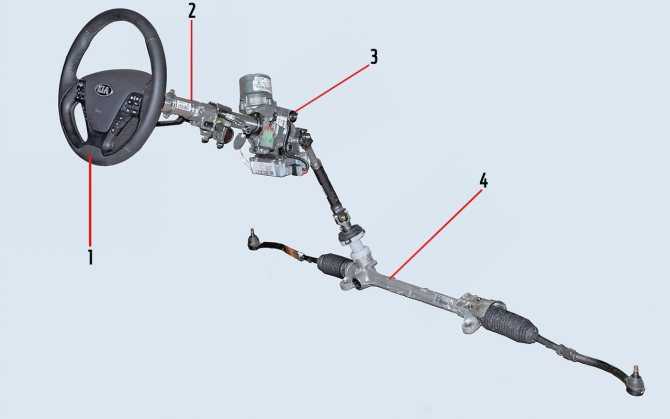 Педиатрическая физ. тер. (2017) 29:207–13. doi: 10.1097/PEP.0000000000000426
Педиатрическая физ. тер. (2017) 29:207–13. doi: 10.1097/PEP.0000000000000426
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
15. Хуан Х.Х., Чен Ю.М., Хуан Х.В., Ши М.К., Се Ю.Х., Чен К.Л. Модифицированные ездовые автомобили и маленькие дети с ограниченными возможностями: эффекты сочетания мобильности и социального обучения. Передний педиатр. (2018) 5:299. doi: 10.3389/fped.2017.00299
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
16. Линч А., Рю Дж. К., Агравал С., Галлоуэй Дж. К. Тренировка силовой подвижности для 7-месячного ребенка с расщеплением позвоночника. Педиатрическая физиотерапия. (2009) 21:362–8. doi: 10.1097/PEP.0b013e3181bfae4c
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
17. Ливингстон Р., Палег Г. Практические соображения по внедрению и использованию силовой мобильности для детей. Dev Med Детский нейрол. (2014) 56:210–21. doi: 10.1111/dmcn.12245
doi: 10.1111/dmcn.12245
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
18. Guerette P, Tefft D, Furumasu J. Детские инвалидные кресла с электроприводом: результаты национального опроса поставщиков. Ассистент техн. (2005) 17:144–58. doi: 10.1080/10400435.2005.10132104
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
19. Логан С.В., Хосподар К.М., Фельднер Х.А., Хуанг Х.Х., Галлоуэй Дж.К. Модифицированное использование автомобиля маленькими детьми с ограниченными возможностями. Pediatr Phys Ther. (2018) 30:50–6. doi: 10.1097/PEP.0000000000000468
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
20. Huang H-H, Galloway JC. Модифицированные игрушечные машинки для раннего развития мобильности: технический отчет. Педиатрическая физ. тер. (2012) 24:149–54. doi: 10.1097/PEP.0b013e31824d73f9
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
21. Нильссон Л., Найберг П. Управление одним переключателем в сравнении с инвалидной коляской с электроприводом для обучения причинно-следственным связям: тематические исследования. Технологическая инвалидность. (1999) 11:35–8. doi: 10.3233/TAD-1999-111-206
Нильссон Л., Найберг П. Управление одним переключателем в сравнении с инвалидной коляской с электроприводом для обучения причинно-следственным связям: тематические исследования. Технологическая инвалидность. (1999) 11:35–8. doi: 10.3233/TAD-1999-111-206
Полный текст CrossRef | Google Scholar
22. Нильссон Л.М., Найберг П.Дж. Обучение вождению: новая концепция обучения детей с глубокими когнитивными нарушениями в инвалидной коляске с электроприводом. Am J Оккупировать Ther. (2003) 57:229–33. doi: 10.5014/ajot.57.2.229
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
23. Nilsson L, Nyberg P, Eklund M, Dicianno BE, Finney L. Тренировочные характеристики, важные для развития осознания использования джойстика у людей с глубокими когнитивными нарушениями. Включает комментарии Dicianno BE и Finney L. Int J Тер реабилитация. (2010) 17:588–95. doi: 10.12968/ijtr.2010.17.11.79539
CrossRef Full Text | Академия Google
24. Нильссон Л., Эклунд М., Найберг П. Обучение вождению в инвалидной коляске с электроприводом: межоценочная надежность инструмента для оценки использования джойстика. Aust Occup Ther J. (2011) 58:447–54. doi: 10.1111/j.1440-1630.2011.00983.x
Нильссон Л., Эклунд М., Найберг П. Обучение вождению в инвалидной коляске с электроприводом: межоценочная надежность инструмента для оценки использования джойстика. Aust Occup Ther J. (2011) 58:447–54. doi: 10.1111/j.1440-1630.2011.00983.x
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
25. Нильссон Л., Эклунд М., Найберг П., Тулезиус Х. Обучение вождению в инвалидной коляске с электроприводом: процесс обучения использованию джойстика у людей с глубокими когнитивными нарушениями. Am J Оккупировать Ther. (2011) 65:652–60. doi: 10.5014/ajot.2011.001750
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
26. Deitz J, Swinth Y, White O. Подвижность с электроприводом и дошкольники со сложной задержкой развития. Am J Оккупируйте Ther. (2002) 56:86–96. doi: 10.5014/ajot.56.1.86
PubMed Abstract | Полный текст перекрестной ссылки | Google Scholar
27. Bottos M, Bolcati C, Sciuto L, Ruggeri C, Felicianangeli A.