Типы привода автомобиля и их преимущества
Сегодня мировой автомобильный рынок имеет 3 разновидности привода автомобиля: передний, задний и полный.
Различие разновидностей приводов автомобиля зависит от того, какая ось является ведущей.
Переднеприводные автомобилиПереднеприводными автомобилями называются автомобили, в которых передняя ось является ведущей, соответственно передние колеса тоже ведущие. Это означает, что двигатель создает крутящий момент и передает его на переднюю ось и на ведущие колеса.
Первые данные о переднеприводных автомобилях были представлены в 30х годах 20 столетия, но данная технология зарекомендовала себя в лучшем образе, поэтому переднеприводные автомобили очень популярны сегодня.
Преимущества переднеприводных автомобилей:Устройство переднеприводных автомобилей значительно проще, чем полноприводных (например, отсутствие карданного вала). Переднеприводные автомобили имеют меньше деталей, чем полноприводные, что значительно облегчает их эксплуатацию и улучшает ремонтопригодность. К тому же КПД двигателя в переднеприводном автомобиле значительно выше, что обеспечивается малым расстоянием между двигателем и ведущими колесами. Одним из основных преимуществ переднеприводного автомобиля можно назвать лучшую управляемость и точную чувствительность
Переднеприводные автомобили имеют меньше деталей, чем полноприводные, что значительно облегчает их эксплуатацию и улучшает ремонтопригодность. К тому же КПД двигателя в переднеприводном автомобиле значительно выше, что обеспечивается малым расстоянием между двигателем и ведущими колесами. Одним из основных преимуществ переднеприводного автомобиля можно назвать лучшую управляемость и точную чувствительность
За счет уменьшения механизмов и деталей при использовании технологии переднеприводных автомобилей можно выиграть в пространственном отношении.
Но как и у всех технологий и деталей у переднеприводного автомобиля есть свои минусы.
Минусы переднеприводного автомобиля:— Сложная конструкция переднего привода;
— Дорогое техническое обслуживание;
— Слышимая вибрация от двигателя;
— Пробуксовка передних колес при резком разгоне автомобиля.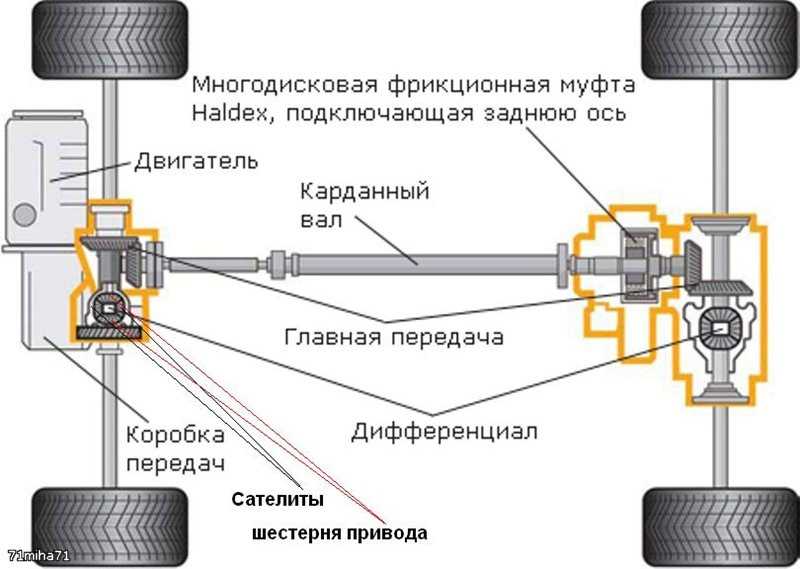
Заднеприводные автомобили
Заднеприводные автомобили отличаются от переднеприводных тем, что ведущей является задняя ось и задние колеса. Привод задних ведущих колес осуществляется за счет передачи крутящего момента от двигателя через коробку передач, карданную передачу, главную передачу на задний мост к главной передаче, которая распределяет крутящий момент по ведущим осям. Заднеприводная конструкция автомобиля обеспечивает динамическую нагрузку на заднюю ось, что дает положительные ходовые качества при движении автомобиля по плохим дорогам (заднеприводные автомобили более проходимые). Правда на скользкой и заснеженной дороге заднеприводные автомобили значительно уступают переднеприводным. А вот при возникновении заноса задний привод поведет себя лучше, и управлять им будет удобнее. Задний привод автомобиля может похвастаться своей надежностью и ремонтопригодностью.
уменьшение пространства в салоне автомобиля за счет необходимости установки тоннеля.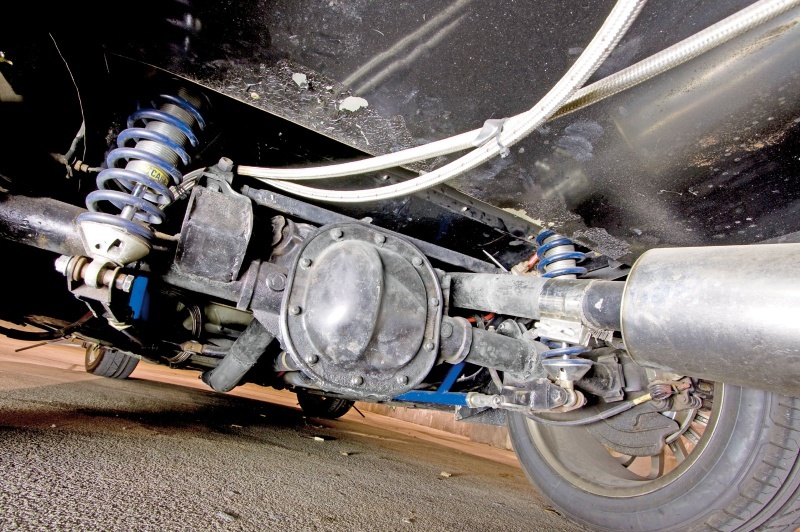
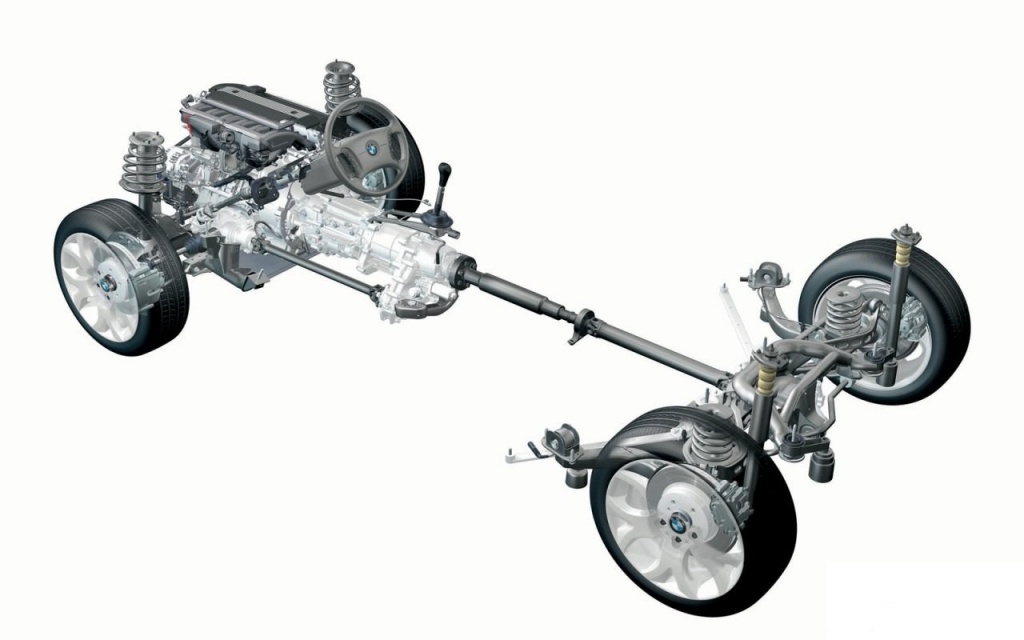
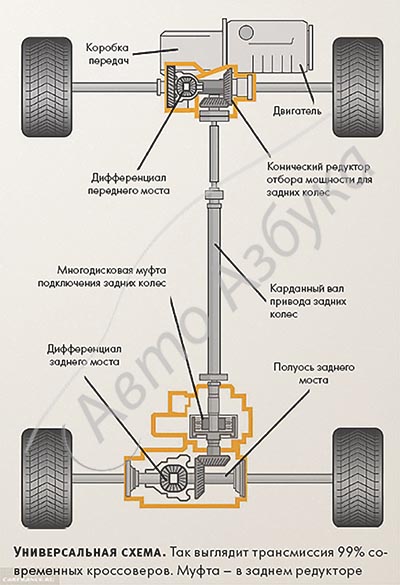
Полноприводные автомобили отличаются, как от переднеприводных, так и от заднеприводных автомобилей. В переднеприводных автомобилях ведущими являются и передний и задний мосты. Можно сказать, что полноприводные автомобили имеют все ведущие колеса.
Существует подключаемый полный привод, что очень удобно, так как, при обычном режиме эксплуатации можно задействовать только одну ось (переднюю). В случае необходимости можно задействовать вторую ось, что обеспечит полный привод. Постоянный полный привод подразумевает использование всех колес в качестве ведущих при всех режимах эксплуатации.
Серединой между постоянным полным приводом и подключаемым выступает полный привод по требованию, который включается автоматически.
Плюсы полноприводного типа автомобилей:— Повышенная проходимость;
— Повышенная устойчивость.
— Повышенный расход топлива;
— Cложное устройствополноприводного автомобиля.
Отличительной особенностью автомобилей с задним и полным приводом является их скорость (более быстрые). Поэтому спортивные автомобили чаще всего выполняются на базе заднеприводного и полноприводного шасси.
ТИПЫ ПРИВОДОВ И ДВИГАТЕЛИ В современной технике у подавляющего числа машин движение рабочих органов является вращательным. К ним относятся транспортные машины, разнообразное станочное оборудование, вспомогательные устройства и средства механизации различных работ (стенды, установки, приспособления с машинным приводом) и т. п. Приводы большей части этих машин допускают применение стандартных двигателей и однотипных механических передач, в том числе стандартных редукторов, что позволяет отнести эти приводы к категории общего назначения. Рациональное проектирование приводов общего назначения должно способствовать снижению их массы, габаритных размеров, повышения к. п. д. и надежности. Машинные приводы общего назначения классифицируются по ряду признаков. Основными из них являются: число двигателей и схема соединения их с передачами; тип двигателей; тип передачи. Особую группу составляют приводы, в которых используются встраиваемые двигатели или встраиваемые механические передачи — мотор-редукторы. 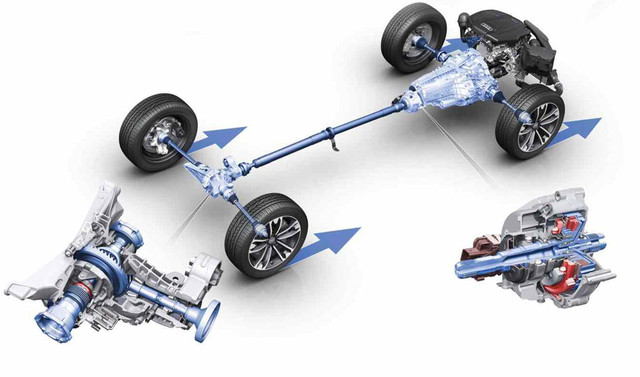 По числу двигателей различаются приводы: групповой, однодвигательный и многодвигательный. Групповым называют привод, при котором от одного двигателя посредством механических передач приводится в движение несколько отдельных механизмов или машин. Привод этого типа применяется в различных строительных и погрузочно-разгрузочных машинах. Групповой привод имеет низкий к. п. д., громоздок и сложен по конструкции.  Гидропривод в этом случае является вторичным в отличие от основного, первичного, привода гидронасоса. Гидропривод в этом случае является вторичным в отличие от основного, первичного, привода гидронасоса. По типу двигателей различаются приводы: электрические; с двигателями внутреннего сгорания; с паровыми двигателями; гидродвигатели; пневмодвигатели. Приводы могут иметь следующие типы передач: цилиндрические и конические зубчатые; червячные; планетарные; волновые; комбинированные; ременные; цепные; винт—гайка; гидродинамические. По расположению механизма привода в пространстве различают приводы с горизонтальным и вертикальным тихоходными выходными валами. В зависимости от расположения привода конструируются элементы передач и выбирается тип и исполнение двигателя. 1.2. ВЫБОР ТИПА И ОПРЕДЕЛЕНИЕ МОЩНОСТИ ДВИГАТЕЛЯ ПРИВОДА Тип двигателя выбирается с учетом ряда факторов, в том числе: 1) назначения механизма или машины, для которой проектируется данный привод; 2) наличия того или иного источника энергии; 3) величины потребной мощности; 4) ограничений по массе, габаритным размерам и условиям работы привода; 5) режима работы привода и обеспечения соответствующей механической характеристики.  Назначение машины обусловливает основные требования к приводу, специфику его работы и параметрические характеристики. При этом учитываются мобильность, внешняя среда, температурные условия, географические особенности и т. п. Наличие электроэнергии предопределяет выбор электропривода как наиболее простого и надежного. В зависимости от потребной мощности, а также от ограничений по массе и габаритным размерам выбирается тот или иной тип электродвигателя либо двигателя внутреннего сгорания. Выбранный двигатель должен удовлетворять следующим условиям: 1) обеспечивать момент, достаточный для разгона механизма с заданным ускорением, а при торможении двигателем — замедление заданной величины; 2) при работе в заданном режиме не должен испытывать длительных перегрузок, ведущих к перегреву электродвигателя или ускоренному износу двигателя внутреннего сгорания. Мощность двигателя всегда относят к определенному режиму работы. При проектировании привода внешние сопротивления и режим работы являются заданными.  Различают три номинальных режима работы двигателей: продолжительный, кратковременный и повторно-кратковременный. При продолжительном режиме работы двигатель нагревается до установившейся температуры в отличие от кратковременного, при котором этого не происходит. При повторно-кратковременном режиме происходят пуск и остановка двигателя, при этом нагрев электродвигателя и возможность реализации заданной мощности определяется продолжительностью включения ПВ по относительному времени за цикл, равный 10 мин. По величине ПВ различают четыре основных повторно-кратковременных режима работы (табл. 1.1). Различают три номинальных режима работы двигателей: продолжительный, кратковременный и повторно-кратковременный. При продолжительном режиме работы двигатель нагревается до установившейся температуры в отличие от кратковременного, при котором этого не происходит. При повторно-кратковременном режиме происходят пуск и остановка двигателя, при этом нагрев электродвигателя и возможность реализации заданной мощности определяется продолжительностью включения ПВ по относительному времени за цикл, равный 10 мин. По величине ПВ различают четыре основных повторно-кратковременных режима работы (табл. 1.1). |
Понимание электронных приводов двигателей | Конструкция машины
Дэйв Полька
Группа продуктов Drives & Power
АББ Инк.
Нью-Берлин, Висконсин
Привод ACS 160 от АББ представляет собой модульный блок, предназначенный как для настенного монтажа, так и для монтажа на электродвигатель IEC. |
Ротор и статор работают за счет магнитного взаимодействия. Количество полюсов и применяемая частота определяют скорость. |
Привод обеспечивает множество различных частотных выходов. Любая заданная выходная частота привода создает уникальную кривую крутящего момента. |
Плата управления привода подает сигнал схемам управления на включение положительной или отрицательной половины сигнала силового устройства. Чередование положительных и отрицательных переключателей воссоздает трехфазный выход. |
Выход привода не является точной копией входного синусоидального сигнала переменного тока. Вместо этого он обеспечивает импульсы напряжения постоянной величины. |
Все приводы с ШИМ содержат входной преобразователь, шину постоянного тока и выходной инвертор. Для простоты показаны только одна фаза входа и выхода для трехфазного привода. |
 Микропривод NEMA-4X (IP65) подходит для приложений, в которых требуется надежная и эффективная работа двигателя в опасных условиях или в условиях промывки водой. Он реагирует на изменения входного сигнала всего за 5 мс, охватывает диапазон от 0,5 до 3 л.с. и диапазон входного напряжения от 380 до 500 В переменного тока, три фазы.
Микропривод NEMA-4X (IP65) подходит для приложений, в которых требуется надежная и эффективная работа двигателя в опасных условиях или в условиях промывки водой. Он реагирует на изменения входного сигнала всего за 5 мс, охватывает диапазон от 0,5 до 3 л.с. и диапазон входного напряжения от 380 до 500 В переменного тока, три фазы. Чем дольше силовое устройство остается включенным, тем выше выходное напряжение. Чем дольше он выключен, тем ниже выходная частота.
Чем дольше силовое устройство остается включенным, тем выше выходное напряжение. Чем дольше он выключен, тем ниже выходная частота. Выбор правильного привода имеет важное значение для получения максимальной производительности и эффективности электродвигателя. Моторный привод управляет скоростью, крутящим моментом, направлением и результирующей мощностью двигателя. Приводы постоянного тока обычно управляют двигателем постоянного тока с параллельной обмоткой, который имеет отдельные цепи якоря и возбуждения. Приводы переменного тока управляют асинхронными двигателями переменного тока и, как и их аналоги постоянного тока, регулируют скорость, крутящий момент и мощность.
Приводы переменного тока управляют асинхронными двигателями переменного тока и, как и их аналоги постоянного тока, регулируют скорость, крутящий момент и мощность.
Например, возьмем простое применение двигателя с фиксированной скоростью вращения вентилятора. Замена трехфазного пускателя двигателя частотно-регулируемым приводом (VFD) позволяет вентилятору работать с переменной скоростью. Одним из преимуществ является экономия энергии, поскольку система изменяет поток воздуха, контролируя скорость двигателя, а не с помощью воздушной заслонки.
Основы привода
Привод может управлять двумя основными выходами трехфазного асинхронного двигателя: скоростью и крутящим моментом. Чтобы понять, как привод управляет этими двумя элементами, давайте рассмотрим асинхронные двигатели. Две основные части двигателя, ротор и статор, работают за счет магнитного взаимодействия. Двигатель содержит пары полюсов — железные компоненты в статоре, намотанные по определенной схеме, чтобы обеспечить магнитное поле с севера на юг.
С одной изолированной парой полюсов в двигателе ротор (вал) вращается с определенной скоростью, базовой скоростью. Количество полюсов и применяемая частота определяют эту скорость. Частота вращения вала, V , встречается с
В = 120 Ж ⁄ П – С
где F = частота двигателя, P = число полюсов двигателя и S = скольжение.
Скольжение — это разница между скоростью вращения ротора и вращающимся магнитным полем в статоре. Когда магнитное поле проходит через проводники ротора, ротор приобретает собственные магнитные поля. Эти магнитные поля ротора пытаются поймать вращающиеся поля статора. Однако они никогда этого не делают, и эта разница является проскальзыванием. Думайте о скольжении как о расстоянии между борзыми и зайцем, которого они преследуют по трассе. Пока они не догонят зайца, они будут продолжать вращаться по дорожке. Скольжение — это то, что позволяет двигателю вращаться.
Например, скольжение для двигателя NEMA-B составляет от 3 до 5% от базовой скорости, что составляет 1800 об/мин при полной нагрузке. Скорость вала в этом случае будет В = 120(60)⁄4 – 54 = 1746 об/мин.
Скорость вала в этом случае будет В = 120(60)⁄4 – 54 = 1746 об/мин.
Удобным и экономичным методом регулировки скорости является изменение частоты, подаваемой на двигатель. Изменение количества полюсов также изменит скорость двигателя, но это физическое изменение потребует перемотки двигателя и приведет к ступенчатому изменению скорости.
Отношение напряжения к частоте (В/Гц) определяет характеристику развития крутящего момента двигателя. Изменение этого соотношения изменяет крутящий момент двигателя. Например, асинхронный двигатель, подключенный к источнику 460 В, 60 Гц, имеет коэффициент 7,67. Пока это соотношение остается постоянным, двигатель развивает номинальный крутящий момент. Привод обеспечивает множество различных частотных выходов и, следовательно, множество различных кривых крутящего момента.
Изменение скорости
Давайте теперь посмотрим, как привод обеспечивает выходную частоту и напряжение, необходимые для изменения скорости двигателя. Все приводы с ШИМ содержат входной преобразователь, шину постоянного тока и выходной инвертор с небольшими различиями в аппаратном и программном обеспечении от одного продукта к другому. В небольших частотно-регулируемых приводах один блок питания может содержать преобразователь и инвертор.
Все приводы с ШИМ содержат входной преобразователь, шину постоянного тока и выходной инвертор с небольшими различиями в аппаратном и программном обеспечении от одного продукта к другому. В небольших частотно-регулируемых приводах один блок питания может содержать преобразователь и инвертор.
Хотя некоторые приводы принимают однофазное питание, мы сосредоточимся на трехфазном приводе. Но для упрощения сопутствующей иллюстрации формы сигналов на рисунках привода показывают только одну фазу входа и выхода.
Входной частью привода является преобразователь. Он содержит шесть диодов, расположенных в виде электрического моста. Диоды преобразуют мощность переменного тока в мощность постоянного тока. Следующий участок — шина постоянного тока — видит фиксированное постоянное напряжение.
Шина постоянного тока фильтрует и сглаживает форму сигнала. Диоды фактически восстанавливают отрицательные половины сигнала в положительную половину. В блоке на 460 В среднее напряжение шины постоянного тока составляет от 650 до 680 В, рассчитанное как линейное напряжение, умноженное на 1,414. Катушка индуктивности (L) и конденсатор (C) работают вместе, чтобы отфильтровать любую переменную составляющую сигнала постоянного тока. Чем более плавная форма сигнала постоянного тока, тем чище выходной сигнал привода.
Катушка индуктивности (L) и конденсатор (C) работают вместе, чтобы отфильтровать любую переменную составляющую сигнала постоянного тока. Чем более плавная форма сигнала постоянного тока, тем чище выходной сигнал привода.
Шина постоянного тока питает инвертор, конечную часть привода. Как следует из названия, эта секция инвертирует постоянное напряжение обратно в переменное. Но это происходит при переменном напряжении и частоте на выходе. Как это происходит, зависит от того, какие силовые устройства использует привод.
Коммутация с IGBT
Справедливо задействованная схема управления координирует переключение силовых устройств, как правило, через плату управления, которая определяет включение силовых компонентов в правильной последовательности. Микропроцессор или цифровой сигнальный процессор (DSP) отвечает всем требованиям к внутренней логике и принятию решений.
Старые диски были основаны на SCR. SCR (первоначально называвшийся тиристором) содержит управляющий элемент, называемый затвором. Затвор действует как переключатель включения, который позволяет устройству полностью проводить напряжение до тех пор, пока полярность не изменится, а затем оно автоматически отключается. Этим переключением управляет специальная схема, для которой обычно требуется другая печатная плата и соответствующая проводка.
Затвор действует как переключатель включения, который позволяет устройству полностью проводить напряжение до тех пор, пока полярность не изменится, а затем оно автоматически отключается. Этим переключением управляет специальная схема, для которой обычно требуется другая печатная плата и соответствующая проводка.
Технология биполярных транзисторов начала вытеснять SCR в приводах в середине 1970-х годов. В начале 19В 90-х годах они уступили место технологии биполярных транзисторов с изолированным затвором (IGBT). БТИЗ включают и выключают шину постоянного тока через определенные промежутки времени. При этом инвертор фактически создает переменное напряжение переменного тока и выходную частоту.
Выходной сигнал привода не обеспечивает точной копии входного синусоидального сигнала переменного тока, как показано на рисунке «Выход ШИМ». Вместо этого он обеспечивает импульсы напряжения постоянной величины. Плата управления привода подает сигнал схемам управления силового устройства на включение положительной или отрицательной половины сигнала силового устройства. Это чередование положительных и отрицательных переключателей воссоздает трехфазный выход. Чем дольше силовое устройство остается включенным, тем выше выходное напряжение. Чем меньше времени включено силовое устройство, тем меньше выходное напряжение. И наоборот, чем дольше силовое устройство выключено, тем ниже выходная частота.
Это чередование положительных и отрицательных переключателей воссоздает трехфазный выход. Чем дольше силовое устройство остается включенным, тем выше выходное напряжение. Чем меньше времени включено силовое устройство, тем меньше выходное напряжение. И наоборот, чем дольше силовое устройство выключено, тем ниже выходная частота.
Скорость, с которой силовые устройства включаются и выключаются, является несущей частотой, также известной как частота переключения. Чем выше частота переключения, тем большее разрешение содержит каждый импульс ШИМ. Типичные частоты переключения составляют от 3000 до 4000 раз в секунду (от 3 до 4 кГц). Старые приводы на основе SCR имеют частоту переключения от 250 до 500 Гц. Очевидно, что чем выше частота переключения, тем более плавной будет форма выходного сигнала и тем выше разрешение. Однако более высокие частоты переключения снижают эффективность привода из-за повышенного нагрева силовых устройств.
Диски различаются по сложности, но каждое новое поколение, как правило, предлагает улучшенную производительность в меньших размерах. Тенденция аналогична тенденции персональных компьютеров. Однако, в отличие от ПК, надежность и простота использования накопителей значительно улучшились. А также, в отличие от компьютеров, типичный современный привод не извергает в систему распределения лишних гармоник и не влияет на коэффициент мощности. Диски все чаще становятся «подключи и работай». По мере того, как электронные силовые компоненты становятся меньше и надежнее, стоимость и размер частотно-регулируемых приводов будут продолжать снижаться, а производительность и простота использования будут только улучшаться.
Тенденция аналогична тенденции персональных компьютеров. Однако, в отличие от ПК, надежность и простота использования накопителей значительно улучшились. А также, в отличие от компьютеров, типичный современный привод не извергает в систему распределения лишних гармоник и не влияет на коэффициент мощности. Диски все чаще становятся «подключи и работай». По мере того, как электронные силовые компоненты становятся меньше и надежнее, стоимость и размер частотно-регулируемых приводов будут продолжать снижаться, а производительность и простота использования будут только улучшаться.
ОБСЛУЖИВАНИЕ ЧРП
Преобразователь частоты — это, по сути, компьютер и блок питания. Держите его в чистоте. Большинство частотно-регулируемых приводов относятся к категории NEMA-1 (боковые вентиляционные отверстия для потока охлаждающего воздуха) или NEMA 12 (герметичный пыленепроницаемый корпус). Приводы NEMA-1 подвержены загрязнению пылью. Пыль на оборудовании может ограничивать поток воздуха, снижая производительность радиаторов и циркуляционных вентиляторов. Пыль на электронных устройствах может привести к неисправности или отказу. Пыль впитывает влагу, что также способствует выходу из строя. Периодическое распыление воздуха через вентилятор радиатора является хорошей мерой профилактического обслуживания. Подача сжатого воздуха в частотно-регулируемый привод является целесообразным вариантом в некоторых условиях, но типичный заводской воздух содержит масло и воду. практика по-прежнему сопряжена с риском образования электростатических зарядов и электростатического разряда. Распылитель, не создающий статического электричества, или вакуум ESD обратного действия уменьшат накопление статического электричества. Обычные пластмассы являются основными генераторами статического электричества. Вакуумные корпуса и вентиляторы ESD изготовлены из специального пластика, не генерирующего статического электричества. Эти пылесосы и баллоны со сжатым воздухом, не генерирующим статический заряд, можно приобрести у специалистов по оборудованию для контроля статического электричества. Держите его сухим. Платы управления, находящиеся во влажной среде, могут в конечном итоге подвергнуться коррозии печатной платы, поэтому держите очевидные источники влаги подальше от частотно-регулируемого привода. Держите соединения затянутыми. Хотя это звучит просто, проверка соединений — это шаг, который многие пропускают или делают неправильно, и это требование применимо даже к чистым помещениям. Тепловые циклы и механическая вибрация могут привести к некачественным соединениям, как и стандартные методы управления проектами. Повторная затяжка винтов не рекомендуется, поскольку дальнейшее затягивание уже затянутых винтов может разрушить хорошее соединение. Дополнительные шаги. Не упускайте из виду внутренние компоненты частотно-регулируемого привода в рамках механической проверки. Проверьте циркуляционные вентиляторы на наличие признаков выхода из строя подшипников или посторонних предметов, обычно проявляющихся необычным шумом или шатанием валов. Измерьте напряжение во время работы частотно-регулируемого привода. Колебания напряжения на шине постоянного тока могут указывать на износ конденсаторов на шине постоянного тока. Одной из функций батареи конденсаторов является работа в качестве секции фильтра, сглаживающей любые пульсации переменного напряжения на шине. Аномальное напряжение переменного тока на шине постоянного тока указывает на то, что конденсаторы могут выйти из строя. Большинство производителей частотно-регулируемых приводов имеют специальную клеммную колодку для этого типа измерений, а также для подключения к резисторам динамического торможения. Напряжение более 4 В переменного тока может указывать на проблему с фильтрацией конденсатора или возможную проблему с секцией преобразователя диодного моста (перед шиной). В таких случаях проконсультируйтесь с производителем частотно-регулируемого привода, прежде чем предпринимать дальнейшие действия. Когда частотно-регулируемый привод находится в режиме пуска и на нулевой скорости, выходное напряжение должно составлять 40 В переменного тока между фазами или меньше. Более высокие показания могут указывать на утечку транзистора. При нулевой скорости силовые компоненты не должны работать. Если показания превышают 60 В переменного тока, ожидайте отказ силового компонента. Регулярно контролируйте температуру радиатора. Большинство производителей частотно-регулируемых приводов упрощают эту задачу, добавляя прямое считывание температуры на клавиатуру или дисплей. И, наконец, включайте ЧРП каждые шесть месяцев, чтобы поддерживать максимальную производительность конденсаторов звена постоянного тока. В противном случае их зарядная способность значительно снизится. Некоторые производители заявляют, что средняя наработка на отказ составляет 200 000 часов — почти 23 года. Соблюдение этих простых процедур позволяет добиться таких впечатляющих результатов. |
 Поэтому применяйте к частотно-регулируемым приводам те же меры предосторожности, что и к этим устройствам, чтобы обеспечить долгие годы бесперебойной работы. Требования к техническому обслуживанию делятся на три основные категории.
Поэтому применяйте к частотно-регулируемым приводам те же меры предосторожности, что и к этим устройствам, чтобы обеспечить долгие годы бесперебойной работы. Требования к техническому обслуживанию делятся на три основные категории. Чтобы использовать сжатый воздух для охлаждения, он должен быть безмасляным и сухим, иначе он, скорее всего, принесет больше вреда, чем пользы. Для этого требуется специализированная, специализированная и дорогая подача воздуха. это
Чтобы использовать сжатый воздух для охлаждения, он должен быть безмасляным и сухим, иначе он, скорее всего, принесет больше вреда, чем пользы. Для этого требуется специализированная, специализированная и дорогая подача воздуха. это Некоторые производители включали тип «защиты от конденсата» в более ранние ЧРП. Когда температура падала ниже 32F, программная логика не позволяла запустить привод. Сегодня частотно-регулируемые приводы редко предлагают такую защиту. При эксплуатации частотно-регулируемого привода в течение всего дня, каждый день нормальное тепловое излучение от радиатора должно предотвращать образование конденсата. Если блок не работает в непрерывном режиме, используйте кожух NEMA-12 и обогреватель с термостатическим управлением, если размещаете блок в месте, где возможна конденсация.
Некоторые производители включали тип «защиты от конденсата» в более ранние ЧРП. Когда температура падала ниже 32F, программная логика не позволяла запустить привод. Сегодня частотно-регулируемые приводы редко предлагают такую защиту. При эксплуатации частотно-регулируемого привода в течение всего дня, каждый день нормальное тепловое излучение от радиатора должно предотвращать образование конденсата. Если блок не работает в непрерывном режиме, используйте кожух NEMA-12 и обогреватель с термостатическим управлением, если размещаете блок в месте, где возможна конденсация. Осмотрите конденсаторы звена постоянного тока на вздутие и утечку. Либо это может быть признаком стресса компонента или неправильного использования электричества.
Осмотрите конденсаторы звена постоянного тока на вздутие и утечку. Либо это может быть признаком стресса компонента или неправильного использования электричества.
Ресурсы по проектированию приводов двигателей | TI.
 com
comМы продвигаем ваш инновационный дизайн управления двигателем, помогая вам создать более точное и широкополосное управление положением, крутящим моментом и скоростью. Достигните самого высокого класса энергопотребления и минимальной задержки с помощью нашей технологии управления и связи в реальном времени. Встроенные функции безопасности и доступная документация по безопасности упрощают сертификацию вашей системы функциональной безопасности в соответствии с IEC 61508 и ISO 13849.для более прочных и надежных систем моторного привода.
Разработка высокоточных, высоконадежных и более эффективных систем электропривода
С нашей технологией управления в режиме реального времени получите токовые контуры с самой низкой задержкой менее 1 мкс
Создавайте более компактные и надежные системы управления в реальном времени с помощью нашего полного набора технологий измерения, обработки, управления и связи, повышая эффективность и точность и отклик с малой задержкой для промышленных дисков. Микроконтроллеры со встроенными периферийными устройствами реального времени и математическими ускорителями, программируемыми процессорами реального времени, конфигурируемыми логическими блоками и встроенными специальными периферийными устройствами для управления двигателем обеспечивают:
Микроконтроллеры со встроенными периферийными устройствами реального времени и математическими ускорителями, программируемыми процессорами реального времени, конфигурируемыми логическими блоками и встроенными специальными периферийными устройствами для управления двигателем обеспечивают:
- Токовая петля менее 1 мкс с начала преобразования в обновление ШИМ
- Внедрение связи с малой задержкой и малым дрожанием
- Надежное и точное измерение, устраняющее необходимость во внешней ПЛИС Многоядерный микроконтроллер
- со встроенными периферийными устройствами реального времени обеспечивает параллельное выполнение алгоритмов управления и профилактического обслуживания.
стрелка вправо Что такое контроль в реальном времени и зачем он нужен? стрелка вправо Узнайте больше о микроконтроллерах реального времени C2000 стрелка вправо Узнайте больше об управлении в реальном времени
Рекомендуемые продукты для управления в режиме реального времени
НОВЫЙ АМ2434 АКТИВНЫЙ Четырехъядерный MCU на базе Arm® Cortex®-R5F с промышленными коммуникациями и безопасностью до 800 МГц
НОВЫЙ АМ6442 АКТИВНЫЙ Двухъядерный 64-разрядный процессор Arm® Cortex®-A53, четырехъядерный процессор Cortex-R5F, PCIe, USB 3. 0 и безопасность
0 и безопасность
ТМС320Ф28384Д-К1 АКТИВНЫЙ Автомобильный 32-разрядный микроконтроллер C2000™ с менеджером подключения, 2 ЦП C28x+CLA, флэш-память 1,5 МБ, FPU64, Ethernet
Создание точных, надежных приводов двигателей и систем управления с высочайшей энергоэффективностью
Лучшая в своем классе технология изоляции с увеличенным сроком службы и характеристиками изоляции помогает вам соответствовать требованиям к изоляции IEC 61800-5-1 и обеспечивает высоконадежные приводы двигателей с длительный срок службы.
Прецизионные аналоговые технологии для точного (с точностью до 0,1%), надежного изолированного измерения тока и обратной связи с энкодером с малой задержкой помогают обеспечить более точное и быстрое управление положением, скоростью и крутящим моментом, а также высокую устойчивость к ЭМС для сокращения времени простоя.
Инновационные интегрированные решения по питанию с защитой помогают создавать более надежные и компактные приводы с высочайшей эффективностью, что позволяет уменьшить глобальное энергопотребление.
стрелка вправо Усиленный опорный датчик изолированного фазного тока стрелка вправо Трехфазный эталонный проект, 1,25 кВт, 200 В переменного тока стрелка вправо Эталонный проект трехфазного инвертора 48 В/500 Вт
Рекомендуемые продукты для измерения и преобразования энергии
UCC23513 АКТИВНЫЙ 5,7 кВ (среднеквадратичное значение), 4A/5A одноканальный опто-совместимый изолированный драйвер затвора с опциями 8 и 12V UVLO
АМС1306М25 АКТИВНЫЙ Вход ±250 мВ, прецизионный изолированный модулятор с усиленным измерением тока
ДРВ8350 АКТИВНЫЙ 102-В макс. 3-фазный драйвер интеллектуальных ворот
Соответствуют требованиям к изоляции IEC 61800-5-1 и обеспечивают более надежные приводы двигателей с длительным сроком службы
- Повышение производительности и надежности системы: Наши высоковольтные сертифицированные изолированные продукты обеспечивают малую задержку, превосходную устойчивость к синфазным переходным процессам и надежная производительность.

- Снижение стоимости системы: Наши технологии изоляции сокращают перечень материалов, снижают стоимость системы и позволяют значительно увеличить размер решения.
- Масштабируемость: Наши инновации в области упаковки и глобальное производство помогают привнести функциональные, базовые и усиленные возможности изоляции в большее количество аналоговых функций ИС.
стрелка вправо Узнайте больше о нашей технологии изоляции стрелка вправо Прочтите об изоляции в приводах переменного тока стрелка вправо Оцените наш эталонный дизайн интерфейса IPM
Рекомендуемые продукты для изоляции
НОВЫЙ ISO6760 АКТИВНЫЙ Универсальный, 50-Мбит/с, шестиканальный (6/0) цифровой изолятор
ИСО7821ЛЛС АКТИВНЫЙ Двухканальный, 1/1, 150 Мбит/с, высокопроизводительный усиленный изолированный буфер LVDS
ИСО1211 АКТИВНЫЙ Одноканальный изолированный приемник цифровых входов 24–60 В для модулей дискретных входов
Самый широкий ассортимент проводных коммуникаций и интерфейсов в режиме реального времени
Повышенная устойчивость, более высокая скорость и более широкий рабочий диапазон для серверов в промышленных и автомобильных приложениях (CAN, RS-485, Profibus, Ethernet, IO-Link, FPDlink, LVDS) .
- MCU со встроенным протоколом Ethernet реального времени и абсолютным энкодером MCU и MPU
- со встроенной чувствительной к времени сетью, интегрированным MCU функциональной безопасности для поддержки функциональной безопасности через промышленный Ethernet и энкодеры (безопасность HDSL, FSoE, Profisafe), а также программируемая логика с поддержкой настраиваемых интерфейсов и протоколов связи
- Универсальный магазин ведущих протоколов промышленного Ethernet
стрелка вправо Многопротокольные промышленные коммуникации стрелка вправо Многопротокольный цифровой датчик положения Master Int
Рекомендуемые продукты для промышленной связи
НОВЫЙ АМ2434 АКТИВНЫЙ Четырехъядерный MCU на базе Arm® Cortex®-R5F с промышленными коммуникациями и безопасностью до 800 МГц
НОВЫЙ АМ6442 АКТИВНЫЙ Двухъядерный 64-разрядный процессор Arm® Cortex®-A53, четырехъядерный процессор Cortex-R5F, PCIe, USB 3. 0 и безопасность
0 и безопасность
ТМС320Ф28388Д АКТИВНЫЙ 32-разрядный микроконтроллер C2000™ с диспетчером подключений, 2 ЦП C28x+CLA, флэш-память 1,5 МБ, FPU64, CLB, ENET, EtherCAT
Соответствие строгим требованиям стандартов функциональной безопасности IEC 61800-5-2 и ISO 13849
В наших продуктах, соответствующих требованиям функциональной безопасности, используются процессы разработки аппаратного и программного обеспечения функциональной безопасности, сертифицированные TÜV SÜD, которые помогают вам достичь высочайшего уровня полноты безопасности и уровня производительности, требуемых вашей конструкцией электропривода для создания более безопасной и эффективной среды.
Наши интегрированные продукты и конструкции, одобренные TUEV, помогут вам разработать более компактные, интеллектуальные, надежные и надежные функции безопасности, такие как Safe Torque Off.
стрелка вправо Ознакомьтесь с нашим эталонным проектом безопасного отключения крутящего момента (STO) стрелка вправо Узнайте больше о функциональной безопасности
Скачать
Рекомендуемые продукты для функциональной безопасности
ДРВ8350Ф АКТИВНЫЙ 102 В, макс. 3 фазы, функциональная безопасность, управляемый качеством драйвер интеллектуальных ворот
3 фазы, функциональная безопасность, управляемый качеством драйвер интеллектуальных ворот
ТПС2660 АКТИВНЫЙ 4,2–60 В, 150 мОм, 0,1–2,23 А eFuse со встроенной защитой от обратной полярности на входе
ИСО1211 АКТИВНЫЙ Одноканальный изолированный приемник цифровых входов 24–60 В для модулей дискретных входов
Технические ресурсы
ВидеоВидео
Децентрализованное управление многоосевым двигателем
Приблизьте управление в реальном времени к действию благодаря нашей децентрализованной архитектуре многоосевого сервопривода.
видеоВидео
Реализация функциональной безопасности в электроприводах
В этом видео объединены четыре конструкции TI и показано, как функции безопасного отключения крутящего момента (STO) и безопасного управления торможением (SBC) могут быть интегрированы в приводы с регулируемой скоростью.
Информационный документ
Высокая точность в управлении приводом двигателя обеспечивает промышленный прогресс
Посмотрите видео, чтобы узнать больше о стандарте IEC 618000-3 для приводов с регулируемой скоростью, требованиях CISPR 11 / EN55011 к выбросам класса A и методах испытаний.
документ-pdfAcrobat ПДФ
Ресурсы для проектирования и разработки
Базовый вариант
Эталонный проект распределенного многоосевого сервопривода через быстрый последовательный интерфейс (FSI)
В этом эталонном проекте представлен пример распределенного или децентрализованного многоосевого сервопривода через быстрый последовательный интерфейс (FSI) с использованием контроллеров реального времени C2000™.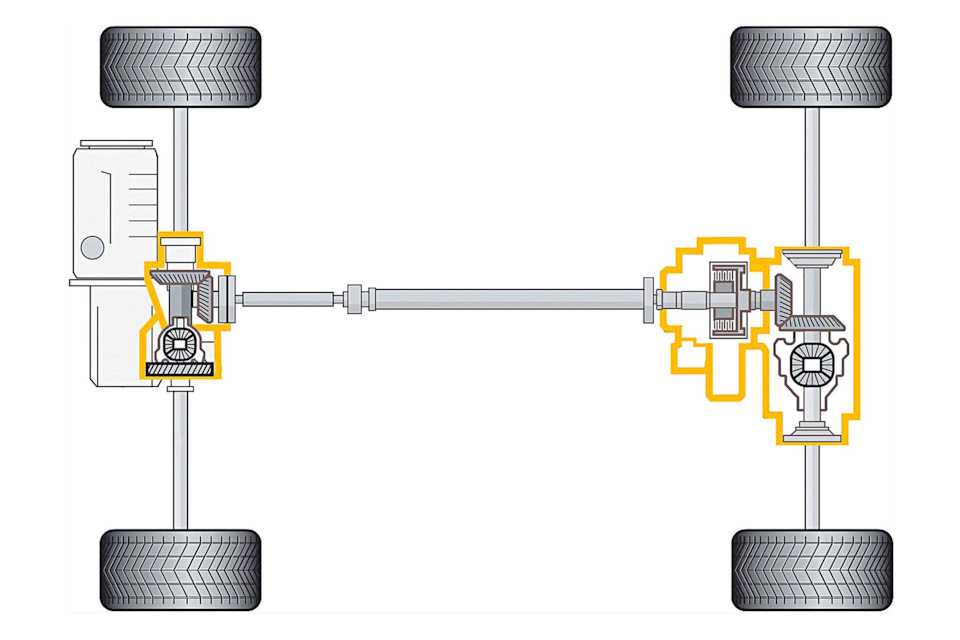 Многоосевые сервоприводы используются во многих приложениях, таких как автоматизация производства и роботы. Стоимость на ось, производительность и (…)
Многоосевые сервоприводы используются во многих приложениях, таких как автоматизация производства и роботы. Стоимость на ось, производительность и (…)
Базовый вариант
Трехфазный, 1,25 кВт, 200 В переменного тока малый форм-фактор инвертора GaN для встроенных приводов
Этот базовый проект представляет собой трехфазный инвертор с номинальной продолжительной мощностью 1,25 кВт при температуре окружающей среды 50 °C и 550 Вт при температуре окружающей среды 85 °C для привода серводвигателей на 200 В переменного тока. Он оснащен 600-вольтовыми силовыми модулями LMG3411R150 из нитрида галлия (GaN) со встроенным полевым транзистором и драйвером затвора, установленными на (…)
Базовый вариант
Эталонный проект безопасного отключения крутящего момента (STO) для промышленных приводов, оцененный TÜV SÜD (IEC 61800-5-2)
В этом базовом проекте представлена подсистема безопасного отключения крутящего момента (STO) для трехфазного инвертора с драйверами затворов IGBT с КМОП-изоляцией на входе.