Рулевые машины и рулевые приводы
Рулевое устройство предназначено для изменения направления движения судна и удержания его на заданном курсе. В состав рулевого устройства входят: руль — для восприятия давления воды и поворота судна; рулевой привод — для связи с рулевой машиной и передачи вращающего момента на баллер; рулевая машина (двигатель) — для обеспечения работы рулевого привода; телединамическая передача (теледвигатель) — для связи рулевой машины с постом управления судна.
Таким образом, рулевая машина является составной частью рулевого устройства.
Рулевые машины по виду используемой энергии делятся на ручные, паровые, электрические и гидравлические. Часто применяют различные комбинации этих основных типов: пароручные, парогидравлические, ручные гидравлические и электрогидравлические.
Ручные и пароручные рулевые машины устанавливают только на небольших судах. Их обычно комбинируют со штур-тросовой проводкой или валиковой передачей. Конструкция этих машин довольно проста; она включает штурвальную тумбу, внутри которой располагается зубчатая передача (ведущая и ведомая шестерни), тяговый барабан (при шгуртросовой проводке) или звездочки (при цепном штуртросе).
На рис. 1 показана схема пароручной рулевой машины, управляемой с поста управления. Она состоит из трех валов: рабочего 11, промежуточного 15 и валика 17 серводвигателя. Пусковой золотник 1 соединен рычагом 2 с валиком серводвигателя. На этом валике на скользящей шпонке насажена коническая шестерня 16, находящаяся в зацеплении с конической шестерней 3 валиковой передачи 4, идущей от штурвала 7, расположенного на ходовом мостике. На правом конце валика серводвигателя навинчена шестерня 5, ступица которой лежит в подшипнике 6. На промежуточном валу находится червячное колесо 14, получающее вращение от машины через червячный вал 13, промежуточную шестерню 9 и ручной штурвал 8.
На рабочем валу жестко закреплены штуртросовый барабан 12 и шестерня 10.
Рис. 1. Схема пароручной рулевой машины.
Вращение штурвала через валиковую передачу 4 передается валику серводвигателя. При вращении валик будет передвигаться вдоль оси, ввинчиваясь в нарезку шестерни 5. Рычагом 2 валик выведет пусковой золотник из среднего положения, и пар поступит в цилиндры паровой машины, которая начнет работать, вращая промежуточный и рабочий валы и тем самым перекладывая руль. Одновременно при работе машины промежуточная шестерня вращает шестерню 5, которая стремится передвинуть валик серводвигателя в обратную сторону.
При вращении валик будет передвигаться вдоль оси, ввинчиваясь в нарезку шестерни 5. Рычагом 2 валик выведет пусковой золотник из среднего положения, и пар поступит в цилиндры паровой машины, которая начнет работать, вращая промежуточный и рабочий валы и тем самым перекладывая руль. Одновременно при работе машины промежуточная шестерня вращает шестерню 5, которая стремится передвинуть валик серводвигателя в обратную сторону.
При остановке штурвала рулевая машина продолжает работать. Поэтому шестерня, вращаясь, передвинет валик серводвигателя и поставит пусковой золотник машины в среднее положение. В результате машина остановится, и перекладка руля прекратится.
Для ручной перекладки руля необходимо ручной штурвал соединить с промежуточным валиком, включить червячную шестерню и разъединить валик сервомотора с валиковой передачей.
- Электрические и электрогидравлические рулевые машины
- Рулевые машины лопастные, электрогидравлические и с винтовым приводом
Рулевые приводы и передачи на морских судах
Рулевые приводы. Для передачи усилия рулевого двигателя баллеру или обеспечения поворота руля вручную применяются рулевые приводы, типы и конструкции которых определяются в основном размерами судна и расположением рулевого двигателя.
Для передачи усилия рулевого двигателя баллеру или обеспечения поворота руля вручную применяются рулевые приводы, типы и конструкции которых определяются в основном размерами судна и расположением рулевого двигателя.
Секторный рулевой привод со штуртросом (рис. 62) встречается только на небольших судах.Перекладка руля осуществляется вручную штурвалом или рулевым двигателем при помощи штуртросовой передачи и сектора. На барабан 1 штурвала или двигателя намотано несколько шлагов короткозвенной цепи 2.
Ее концы, проведенные через направляющие блоки — роульсы 3, присоединены к стальным штангам 4, проложенным по палубе на роликах или деревянных вкладышах. Концы штанг присоединены к корпусам жестких стальных пружин — амортизаторов 5. На головке баллера 10 жестко закреплена ступица сектора 9, имеющего на ободе два желоба для штуртросной цепи.
Цепи 6 и 11 одними концами присоединены к шайбам, сжимающим пружины, а другими — проведены через направляющие роульсы по желобам сектора и присоединены соответственно к талрепам 8, закрепленным на ступице. Талрепы служат для обтягивания штуртроса.
Талрепы служат для обтягивания штуртроса.
Перекладка руля на угол более 35° ограничивается приваренными к палубе кницами 7. В местах прохода по грузовой палубе штуртрос защищен металлическим кожухом. При повороте барабана штурвалом или рулевым двигателем одна ветвь штуртроса ослабляется, а другая выбивается, сектор разворачивается и поворачивает баллер.
Секторный привод со штуртросом имеет существенные недостатки: сложная и громоздкая проводка штуртроса, быстрый износ цепи и других трущихся частей, неудобство ухода за ним при перевозке палубного груза и др.
рис. 63 Секторно-румпельный привод
Поэтому более широкое применение получили секторно- румпельные приводы (рис. 63) с рулевым двигателем, установленным вблизи от сектора руля. Сектор, свободно насаженный на баллер, имеет зубчатый обод 1, входящий в зацепление с зубчатой шестерней 2 рулевого двигателя. Через буферные пружины — амортизаторы 3 сектор связан с румпелем 4, жестко насаженным на головку баллера.
Перекладка руля осуществляется рулевым электродвигателем, который поворачивает сектор, а он через пружины поворачивает румпель и баллер руля. Электрогидравлические рулевые приводы получили широкое применение на судах любого тоннажа.
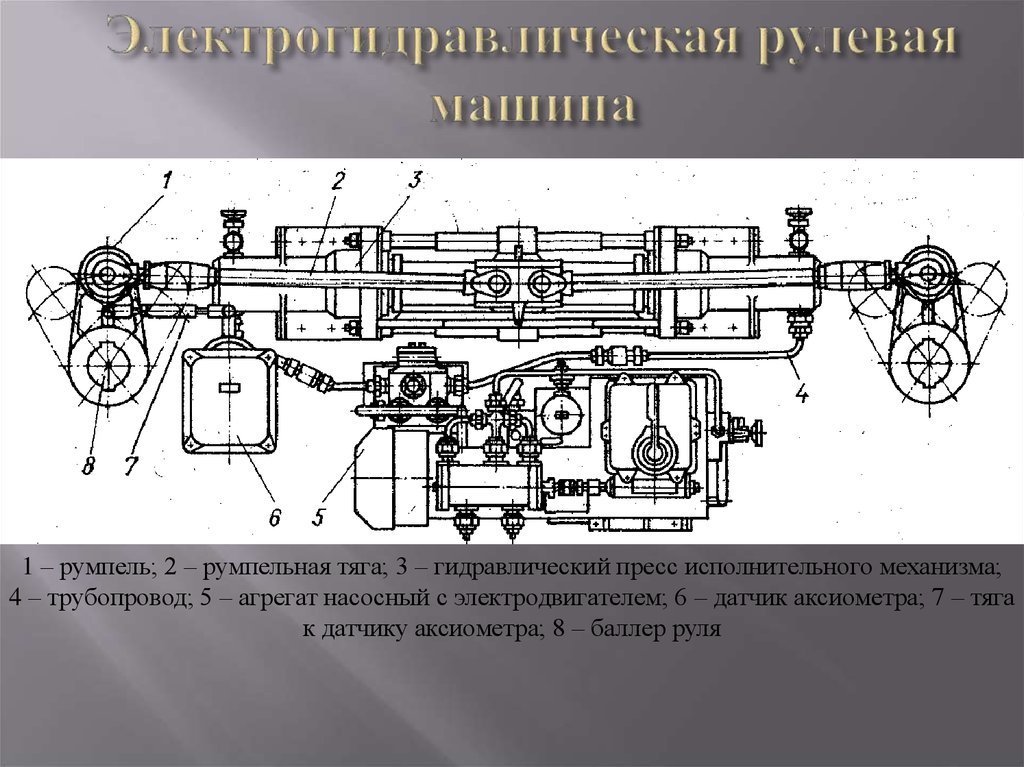
Такой привод в комплексе с электродвигателем представляет собой электрогидравлическую рулевую машину. На судах обычно устанавливаются плунжерные двух- или четырехцилиндровые электрогидравлические машины.
рис. 64 Схема двухцилиндровой рулевой машины
Схема устройства двухцилиндровой рулевой машины довольно проста (рис. 64). На головку баллера руля 1 жестко насажен румпель 2, на котором установлен ползун 3, имеющий с боков сферические углубления. В них входят и свободно упираются штоки 4 от плунжеров 5 двух гидроцилиндров 6. Цилиндры соединены трубопроводами 7 с насосом 9, который приводится в действие электромотором 10 Вся система заполняется маслом.
При работе электромотора насос отсасывает масло из одного цилиндра и нагнетает в другой, в результате чего плунжер цилиндра, находящегося под давлением, своим штоком давит на ползун и через него поворачивает румпель и баллер руля. Оба цилиндра соединяются между собой дополнительным трубопроводом с перепускным клапаном 8, который является амортизатором.
Оба цилиндра соединяются между собой дополнительным трубопроводом с перепускным клапаном 8, который является амортизатором.
При ударах волн о перо руля давление в одном из цилиндров повышается, перепускной клапан открывается и перепускает часть масла в другой цилиндр. Кроме электрогидравлического привода плунжерного типа, нашли применение лопастные и винтовые гидравлические приводы.
Для удержания пера руля в фиксированном положении на случай ремонта или перехода с одного привода на другой рулевое устройство имеет стопоры. В гидравлических приводах стопорение руля обеспечивается перекрытием масляных трубопроводов при помощи специальных клапанов.
Ручные рулевые приводы (гидравлические, секторные с валиковой передачей и винтовые) применяются как, запасные или аварийные. Широкое применение на судах получил ручной поперечно-румпельный с винтовым механизмом перекладки руля привод Дэвиса.
рис. 65 Винтовой рулевой привод Дэвиса
Привод Дэвиса (рис. 65) устанавливается в румпельном отделении в непосредственной близости от румпеля. Винтовой шпиндель 4, приводимый во вращение штурвалом 6, имеет на одной половине винта правую нарезку, на другой левую. На шпиндель навинчены два ползуна 5 и 7, имеющих в приливах отверстия, через которые проходят гладкие направляющие стержни 3 и 8, укрепленные в станине. Стержни обеспечивают перемещение ползунов вдоль шпинделя без перекосов.
65) устанавливается в румпельном отделении в непосредственной близости от румпеля. Винтовой шпиндель 4, приводимый во вращение штурвалом 6, имеет на одной половине винта правую нарезку, на другой левую. На шпиндель навинчены два ползуна 5 и 7, имеющих в приливах отверстия, через которые проходят гладкие направляющие стержни 3 и 8, укрепленные в станине. Стержни обеспечивают перемещение ползунов вдоль шпинделя без перекосов.
Стальными тягами 2 и 9 ползуны соединены с поперечным румпелем 1, жестко насаженным на головку баллера. При вращении штурвала ползуны перемещаются по шпинделю в разные стороны и через тяги поворачивают румпель. Винтовой привод повышает усилие, передаваемое от штурвала на баллер, в 25 — 30 раз.
Рулевые передачи. Существуют механические1 (валиковые, штуртросовые, стержневые и др.), гидравлические и электрические рулевые передачи.
Гидравлическая передача применяется для управления пусковым устройством электрогидравлического рулевого привода. Она представляет собой систему из поршневого насоса, приемника гидравлической передачи — цилиндра и тонких медных трубок, соединяющих между собой соответствующие полости цилиндров насоса, и приемника.
Поршень насоса получает движение от штурвала, с которым он связан непосредственно, а поршень цилиндра приемника связан через тяги с пусковым устройством гидравлического рулевого привода. Вся система цилиндров и трубопроводов заполнена незамерзающей смесью воды с глицерином или минеральным маслом.
Поворот штурвала приводит в движение поршень насоса, который сжимает рабочую жидкость в одной из полостей, в результате чего поршень приемника перемещается и через тяги вводит в действие электрогидравлический рулевой привод.
Электрическая передача, как наиболее совершенная, получила широкое применение в судовых рулевых устройствах. Она предназначена для дистанционного управления рулевым электродвигателем. В зависимости от устройства последнего на судах применяются различные схемы электрической передачи. Подробное описание схем и инструкция по обслуживанию передачи приводится в технической документации рулевого устройства.
Что такое рулевой механизм на кораблях?
Система рулевого управления представляет собой группу оборудования, работающего вместе с единственной целью обеспечения направления судна во время его движения в море. Система рулевого управления позволяет кораблю поворачиваться с левого борта (слева) на правый (правый), с правого (правый) на левый (левый) или удерживать определенный курс к лодке в соответствии с указаниями.
Система рулевого управления позволяет кораблю поворачиваться с левого борта (слева) на правый (правый), с правого (правый) на левый (левый) или удерживать определенный курс к лодке в соответствии с указаниями.
В настоящее время суда оснащаются либо гидравлической системой, либо комбинацией электрической и гидравлической систем (электрогидравлической).
Судовой рулевой механизм Принцип работы
Обычно система рулевого управления судна приводится в действие в рулевой рубке или на мостике, а на некоторых малых судах также на флайбридже.
В экстренных случаях управление рулевым приводом также осуществляется локально – помещение рулевого управления представляет собой помещение лодки, в котором находится силовая установка рулевого устройства, цилиндры телемотора, шток руля и т.п. Помещение рулевого управления обычно расположено на первой переборке прямо над пером руля.
Рулевое устройство на большом танкере При типичной эксплуатации корабля капитан или пилот задает курс, судно должно идти по курсу, затем рулевой поворачивает/устанавливает угол пера руля через рулевой контроллер в этом приказе и удерживает его до следующего приказ дан.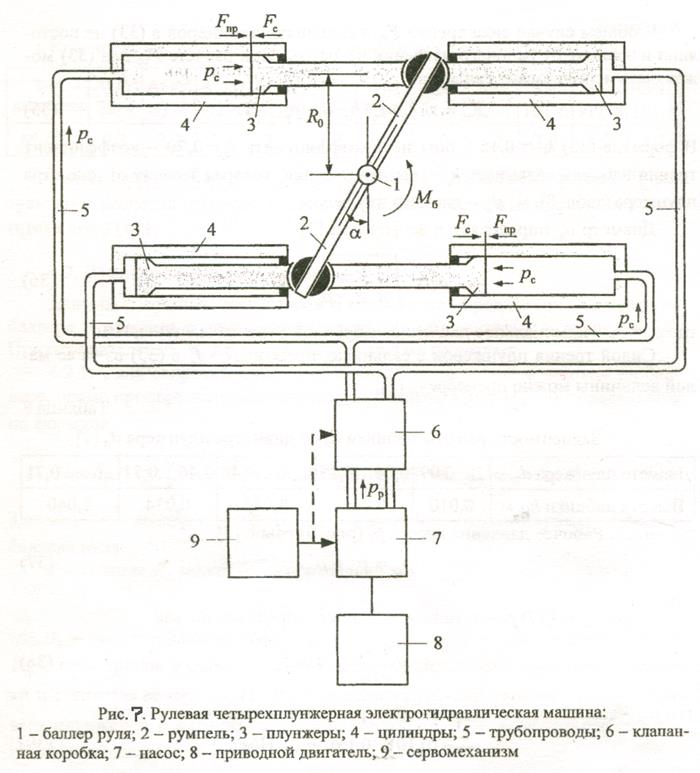 Угол поворота руля подтверждается повторителем угла поворота руля, также расположенным в рулевой рубке.
Угол поворота руля подтверждается повторителем угла поворота руля, также расположенным в рулевой рубке.
В аварийной ситуации рулевой управляет системой рулевого управления локально с помощью штурвала ручного управления или электромагнитного клапана, который нажимается в любом направлении, чтобы переместить руль левого или правого борта. Приказ капитана отдается по телефону, доступному на местном рабочем посту.
Рулевой механизм на маленьком балкереКак и другие корабли, самолеты и даже некоторые автомобили, судно оснащено автопилотами. Эти автопилоты берут на себя рулевое управление после активации всякий раз, когда судно выходит в открытое море. Автопилот — это электронное оборудование, которое управляет движением руля, чтобы следовать путевым точкам, намеченным для завершения рейса.
Судовой рулевой механизм Требование SOLAS
Система рулевого управления является критически важной системой на борту, как объяснялось выше, система рулевого управления жизненно важна для маневрирования судна..jpg) Международная конвенция по охране человеческой жизни на море (СОЛАС) издала требования и правила, которые должны соблюдаться каждым судном, чтобы оно считалось мореходным. В техническом примечании несколько моментов, касающихся системы рулевого управления корабля, следующие:
Международная конвенция по охране человеческой жизни на море (СОЛАС) издала требования и правила, которые должны соблюдаться каждым судном, чтобы оно считалось мореходным. В техническом примечании несколько моментов, касающихся системы рулевого управления корабля, следующие:
- Помещение рулевого управления должно быть отделено от механизмов судна и всегда/легкодоступно.
- Судно должно быть оборудовано основным и вспомогательным рулевым приводом
- Главный и вспомогательный рулевые приводы должны быть способны работать независимо в случае отказа одной системы судно все еще имеет средства для маневрирования в море
- Система основного рулевого привода должна иметь возможность перемещать руль направления от 35 до 30 градусов либо с левого на правый борт, либо с правого на левый борт в течение 28 секунд при полной скорости и полной нагрузке. Те же критерии применимы к полному движению назад 9.0024
- Вспомогательная система рулевого управления должна быть способна перемещать руль направления с 15 градусов на 15 градусов влево или наоборот в течение 60 секунд на скорости не менее 7 узлов при полной загрузке.

Как работает система управления судном?
Как правило, рулевой механизм работает за счет связи между тремя его основными частями – телемотором, блоком управления и силовым агрегатом. Приказ об изменении угла руля с помощью телемотора, который имеет передающую и приемную части.
Конец передатчика аналогичен вводу команды, где задается желаемый угол поворота руля. Затем телемотор передает этот заказ на принимающую сторону, которая подключена к блоку управления. Блок управления, как следует из названия, управляет силовым агрегатом, который перемещает руль направления из одного положения в другое, и блок управления получает команду до следующего. Этот силовой агрегат создает силу для перемещения руля/рулей направления, при котором блоку управления приказано.
Силовой агрегат соединен со штоком/ами руля, который синхронизирует движение пера руля и силового агрегата. Руль направления также связан с датчиком угла поворота руля, который подавал информацию на повторитель угла поворота руля на каждом посту управления рулевым устройством (рулевой пост, рулевая рубка и флайбридж), а в некоторых конструкциях даже на кабинете/каюте капитана.
В уточнении, принцип работы рулевого привода, рассматриваемого до этого момента, представляет собой следящий режим (FU) рулевого механизма, используемый на корабле. Чтобы подчеркнуть, режим рулевого механизма FU поворачивает руль направления на заданный угол и остается в этом положении, в то время как другой режим называется режимом без следования (NFU).
В режиме NFU руль перемещается на угол, на который он направлен, но при достижении заданного положения угол руля переходит в исходное положение или положение на миделе.
Типы рулевых механизмов на корабле
На кораблях есть два типа рулевых механизмов. Типы классифицируются в зависимости от используемой силовой установки или движущей силы. Они могут быть как полностью гидравлическими, так и электрогидравлическими.
Полностью гидравлический рулевой механизм
Полностью гидравлический тип, ручной гидравлический насос перемещается по часовой стрелке или против часовой стрелки. Это движение перекачивает масло к электромагнитному направляющему клапану, который перемещает шток, прикрепленный к рулевому управлению.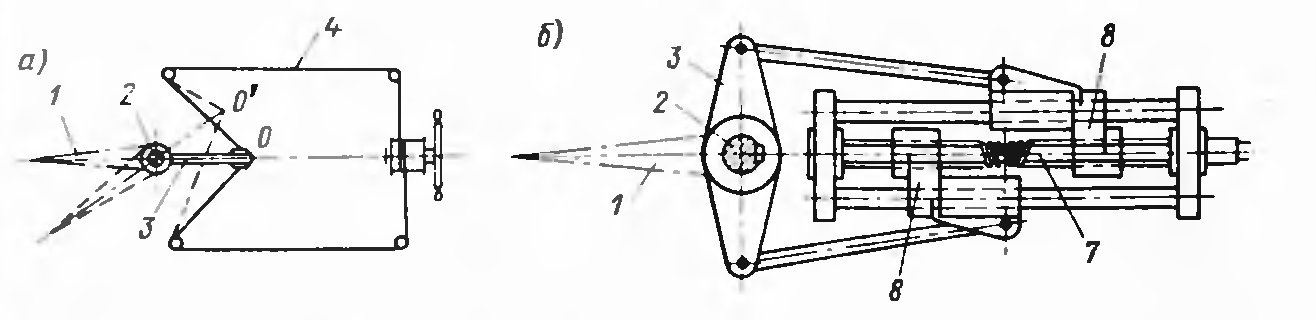
Движение тарана, параллельное рулю направления, влево или вправо, поворачивает лопасть руля на определенный угол влево и вправо. Этот тип гидравлической связи является чисто механическим по своей природе и не требует электричества для работы.
Они широко использовались в прежние времена, но до сих пор устанавливаются в качестве вспомогательных рулевых устройств на небольших судах.
Электрогидравлический рулевой привод
Электрогидравлический тип рулевого привода широко используется в настоящее время на торговых судах. Тот же принцип применим только к этой конструкции, в которой используются электродвигатели для подачи гидравлической жидкости к цилиндру и обеспечения движения лопастей руля направления.
Они обычно управляются джойстиком румпеля, установленным на рулевой рубке. Джойстик подает электрический сигнал на блок управления для открытия и закрытия гидравлических клапанов для перемещения руля направления в нужном направлении и под нужным углом.
Вспомогательное устройство таких типов подключается к аварийному источнику питания, обычно к аварийному генератору переменного тока, для питания системы и обеспечения средств управления судном даже во время отключения электроэнергии.
Основные части морской системы рулевого управления
Ранее кратко обсуждались три основные части системы морского рулевого управления. Основными частями системы морского рулевого привода являются телемотор, блок управления и силовая установка . Эти части будут подробно обсуждаться в следующем разделе этой статьи.
Телемотор рулевого механизма
Телемотор — это блок, на который задается желаемый угол. Телемотор передает информацию/команду из рулевой рубки или поста рулевого управления в рубку рулевого управления с помощью механических или электрических средств.
На рулевой рубке установлен передатчик, который передает команду на приемник, расположенный в рубке рулевого управления и напрямую связанный с блоком управления.
Телемотор в широком смысле — узел, состоящий из штурвала или румпельного джойстика и труб и электрических кабелей или механических тяг, идущих в помещение рулевого привода. Подробнее о телемоторных функциях читайте в этой статье.
Блок управления рулевым механизмом
Блок управления — это часть, которая получает и обрабатывает информацию, поступающую от телемотора. Этот блок состоит из мотопомпы, которая управляет небольшой гидравлической силовой установкой, состоящей из электромагнитного клапана бака и плунжера. Блок управления при получении команды от телемотора качает масло в определенном направлении, чтобы обеспечить движение цилиндрического плунжера. Этот цилиндрический поршень перемещается вбок и связан с плавающим или рычажным рычагом, прикрепленным к основному насосу силовой установки.
Рулевой механизм Силовой агрегат
Силовой агрегат является последней фазой системы рулевого механизма, куда доставляется заказ. Силовой агрегат обеспечивает мощность и крутящий момент, необходимые для перемещения пера руля направления на желаемый угол.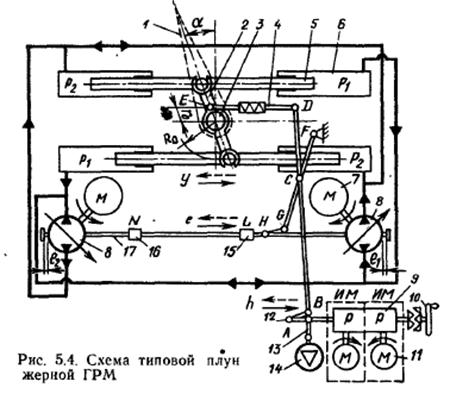 И, как уже упоминалось, в некоторых конструкциях он создает усилие, необходимое для удержания руля направления в его положении/угле.
И, как уже упоминалось, в некоторых конструкциях он создает усилие, необходимое для удержания руля направления в его положении/угле.
Силовой агрегат представляет собой гидравлический насос (радиально-поршневого или аксиально-поршневого типа), приводимый в действие большим электродвигателем, который, как и в блоке управления, нагнетает масло в цилиндрический блок, перемещающийся параллельно рулю направления. С помощью механической связи движение цилиндра преобразуется в движение руля направления.
Морские системы рулевого управления — Минусы…
Пожалуйста, включите JavaScript
Морские системы рулевого управления — Строительство и работа
Подготовка судового рулевого устройства и бортовые учения управление аварийным рулевым приводом корабля. О том, как он эксплуатируется и о сценарии ролевой игры в чрезвычайной ситуации. Эти учения также являются регулярным средством проверки оборудования связи между рулевым управлением и рулевой рубкой.
 А также следить за исправностью аварийного рулевого механизма.
А также следить за исправностью аварийного рулевого механизма.За двенадцать (12) часов до отплытия судна проверяются работа главного и вспомогательного рулевых приводов, управление и электропитание, и обеспечивается их исправное состояние. Правильность/калибровка угла поворота руля на местном пульте управления проверяется параллельно с обратной связью угла поворота руля на рулевой рубке.
Наконец, также проверяется, что система связи между рубкой рулевого управления и мостиком установлена и готова к работе.
За час до отправления судна также проводится контрольная проверка или проверка работоспособности. Этот тест выполняется путем включения рулевого управления и поворота руля направления на разные углы.
Заключительные слова
Описанная система обычно называется рулевым механизмом поршневого типа. Поскольку технология продолжает быстро развиваться, создается множество конструкций рулевого механизма, хотя его основной принцип остается неизменным в каждой системе. Одной из известных конструкций системы рулевого управления является система рулевого управления с вращающимися лопастями. Отличие ее от широко обсуждаемой состоит в том, что вместо плунжера в ней используются лопасти, которые вращаются в неподвижном корпусе.
Одной из известных конструкций системы рулевого управления является система рулевого управления с вращающимися лопастями. Отличие ее от широко обсуждаемой состоит в том, что вместо плунжера в ней используются лопасти, которые вращаются в неподвижном корпусе.
Кроме того, в этом обсуждении рулевого механизма как жизненно необходимого неоднократно повторяется, что он часто и регулярно обслуживается на борту.
Как работают массивные рулевые механизмы корабля!
Посмотреть это видео на YouTube
- Автор
- Последние сообщения
Дмитрий Шафран
Работал офицером палубной службы на различных типах судов, включая танкеры-химовозы, газовозы и даже рефрижератор и ТСВД в первые годы. В настоящее время работает морским сюрвейером, выполняющим грузовые, осадочные, бункерные и гарантийные обследования. Вы можете найти меня в LinkedIn.
Последние сообщения Дмитрия Шафрана (посмотреть все)
Рулевое управление на судах Работа, типы, схемы, правила
Что такое рулевое управление?
Рулевой механизм — это оборудование, предусмотренное на судах для поворота судна из левого борта (левый борт) в правый борт (правый борт) или правого борта в левый во время движения судна во время плавания.
Table of Contents
Примечание:- Работает только когда корабль движется и не работает когда корабль стоит.
Вместимость
Мощность системы рулевого управления должна быть такой, чтобы руль можно было поворачивать с 35° левого борта на 35° правого борта и наоборот, и он должен иметь возможность поворачивать руль направления с 30° в одну сторону на 35° в другую сторону в течение 28 секунд.
Примечание: — Рулевой механизм работает только тогда, когда корабль находится в движении.
Обязательно прочтите: Генератор пресной воды
Основные компоненты системы рулевого управления
В система рулевого управления , рулевой привод обеспечивает движение руля по сигналу с мостика.
3 основные части системы рулевого управления
а) Контрольное оборудование : Контрольное оборудование передает сигнал желаемого угла поворота руля от рулевой плоскости, куда он поступает, чтобы активировать силовой агрегат и систему трансмиссии до тех пор, пока не будет достигнут желаемый угол .
b) Блок питания :- блок питания обеспечивает усилие, когда требуется и с немедленным усилием перемещает руль направления на желаемый угол.
c) Блок трансмиссии к баллеру руля :- Система трансмиссии (рулевой механизм) – это средство, с помощью которого осуществляется движение руля.
Примечание. Управляющее оборудование может представлять собой гидравлическое управляющее оборудование (известное как телемотор) или электрическое электронное управляющее оборудование.
Рулевое управление (телемоторный передатчик) на ходовом мостике, которое посылает электрические сигналы на телемоторный приемник в рубке корабля.
Этот телемоторный приемник в помещении рулевого управления посылает электрические сигналы на электромагнитные клапаны управления направлением движения.
Какие типы рулевых механизмов используются на кораблях?
1) Электрогидравлическая система
a) Система поршневого типа (2 или 4 поршня)
b) Система лопастного типа
2) Полностью электрическая система a) Система Ward Leonard b) Система с одним двигателем
Типы гидравлической трансмиссии или рулевого механизмаОн бывает двух типов: —
a) Рама типа (может быть 2 или 4 рамы)
b) Ротационно-лопастной тип
Здесь мы обсудим систему рулевого механизма поршневого типа
Система рулевого механизма поршневого типа Рабочая
Рабочая
) гидравлический цилиндр, будет происходить скользящее движение домкратов слева направо. Через траверсу RAM румпель будет двигаться к правому борту, а руль направления — к левому.
Через траверсу RAM румпель будет двигаться к правому борту, а руль направления — к левому.
Мгновенная прокачка наклоняется, движение рычага румпеля останавливается, а руль гидравлически блокируется в этом новом положении, так как теперь масло не имеет возможности вытекать и полностью заблокировано в гидроцилиндрах гидроцилиндров и наоборот.
Двухцилиндровый рулевой механизм РабочийНа рисунке показано расположение двухцилиндрового рулевого механизма.
При повороте руля сигнал поступает на телемоторный приемник через телемоторный передатчик, который управляет ловчим снаряжением.
Вращение охотничьего снаряжения Перемещает рабочий шпиндель насоса с регулируемой подачей (типа Hele Shaw или наклонной шайбы) из нейтрального положения.
При этом насос начинает качать в один гидроцилиндр, а из другого гидроцилиндра масло подсасывается к насосу. И таран приходит в движение и это движение передается через румпель на баллер руля и руль направления.
Движение руля заставляет охотничий механизм перемещаться таким образом, что после достижения желаемого угла поворота руля рабочий шпиндель насоса возвращается в нейтральное положение, и руль направления больше не остается в желаемом угловом положении.
4-цилиндровый рулевой механизм РабочийНа приведенной выше схеме показано устройство четырехцилиндрового рулевого механизма.
Рабочий
Когда сигнал от телемоторной системы приводит в действие охотничий механизм, он приводит в действие насосы переменной подачи в положение нагнетания, таким образом, масло течет к двум цифрам, расположенным по диагонали напротив цилиндра (скажем, 1 и 4) из двух других цилиндров (второго и третьего). масло попадает в насос.
Заставляет руль направления поворачиваться по часовой стрелке. Если из-за действия телемоторной системы поворотный механизм переместится в другую сторону, то масло будет подаваться в цилиндры 2 и 3, а из 1 и 4 масло будет поступать в насос и таким образом руль направления будет поворачиваться против часовой стрелки.
При повороте руля охотничье снаряжение перемещается таким образом, что после достижения желаемого положения рычаг управления насосом переводит насос в нейтральное положение, а желаемое положение руля сохраняется.
Каждый цилиндр оснащен запорным клапаном. Имеется два перепускных клапана и предохранительный клапан, соединяющий цилиндры 1 и 2 и цилиндры 3 и 4.
В случае избыточного давления в цилиндре (что может произойти из-за удара по рулю направления)
Подпружиненный перепускной клапан откроется автоматически приводит к обходу подключенного цилиндра.
В системе предусмотрен пополняющий бак для восполнения любых потерь гидравлического масла.
Средства безопасности в системе рулевого управления на судне
A) Запорный клапан : — запорные клапаны предусмотрены на каждом цилиндре и количестве вращающихся лопастей, которые в закрытом состоянии будут удерживать руль, удерживая масло в камерах. Насосы также оснащены запорными клапанами, поэтому что насос может быть полностью отключен от контура и удален для обслуживания, в то время как рулевое управление будет продолжаться с другими насосами.
B) Перепускной клапан :-. Перепускные клапаны обычно закрыты, но могут быть открыты на двухцилиндровом редукторе, чтобы обеспечить возможность использования аварийного рулевого управления. Одна пара цилиндров может быть перепущена на четырехцилиндровом редукторе, в то время как другая пара цилиндров обеспечивает аварийное рулевое управление при пониженном крутящем моменте.
C) Предохранительные клапаны :- Предохранительные клапаны устанавливаются между дополнительной парой цилиндров или камерами лопастных шестерен. Они настроены на подъем при давлении выше нормального максимума.
D) Амортизационные клапаны установлены в трубопроводе системы между цилиндрами для предотвращения чрезмерной ударной нагрузки от руля из-за передачи сильного волнения на гидравлическую систему.
Какие устройства безопасности для системы рулевого управления
Предохранительные устройства
- Охотничье снаряжение
- Буферная пружина
- Ограничитель угла (Концевой выключатель положения передачи)
- Двойной ударный клапан
- Предохранительный клапан
- Уровень бака сигнализация (масло)
- Сигнализация перегрузки
Как работает корабельный рулевой механизм?
«Усилие управления» для поворота срабатывает от штурвала на штурвале, которое достигает системы рулевого управления. Система рулевого управления создает крутящее усилие в определенном масштабе, которое затем, в свою очередь, передается на рулевой механизм, вращающий рулевое колесо.
Система рулевого управления создает крутящее усилие в определенном масштабе, которое затем, в свою очередь, передается на рулевой механизм, вращающий рулевое колесо.
Что такое аварийное рулевое управление?
Аварийная система рулевого управления, как следует из названия, представляет собой систему, которая используется при выходе из строя главной системы рулевого управления корабля.
Может возникнуть ситуация, при которой дистанционное управление может не работать, и это может быть внезапная потеря управления с мостика. Это может быть связано с внезапным сбоем питания, любой электрической неисправностью в системе или системе управления, которая включает в себя неисправный телемотор или серводвигатель, который используется для передачи сигнала с мостика на блок рулевого управления.
Система аварийного рулевого управления используется для управления рулевым управлением корабля в такой аварийной ситуации путем ручного измерения его внутри рубки рулевого управления.
Википедия
Часто задаваемые вопросы (FAQ)
Для чего нужен рулевой механизм?
Предназначен для поворота корабля с левого борта на правый и наоборот. Его назначение в машине крутить руль.
Каковы 3 основные части системы рулевого управления?
Основными частями являются трансмиссия, блок питания и блок управления.
Какие существуют 2 типа систем рулевого управления?
1. Гидравлический и 2. Электрогидравлический
Что такое рулевой цилиндр?
Рулевой цилиндр, также известный как рулевой цилиндр, является наиболее важной частью гидравлической системы рулевого управления. Чтобы обеспечить правильную и точную работу, выберите подходящий гидроцилиндр рулевого управления для вашего применения.
Что такое система рулевого управления с последующим и неконтролируемым управлением?
Последующие действия : – Это стандартный метод рулевого управления, который включает обратную связь с штурвалом по углу поворота рулевого колеса.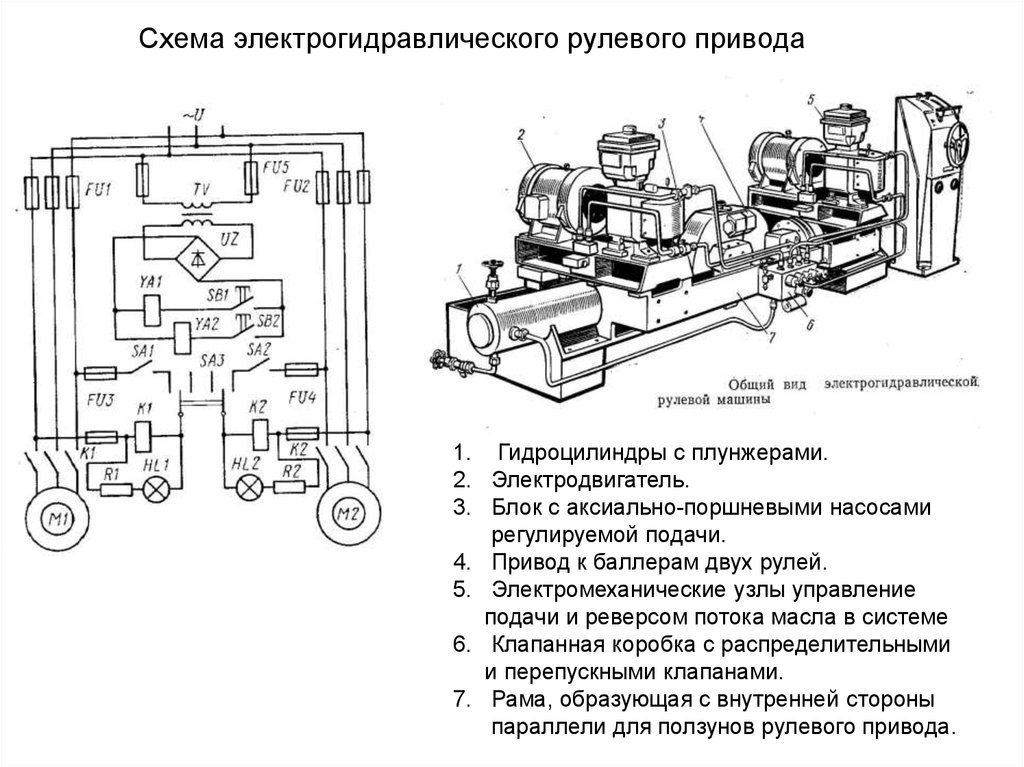 Это может осуществляться вручную или автоматически.
Это может осуществляться вручную или автоматически.
Курс корабля можно запрограммировать в автопилоте, который затем сравнит его с желаемым курсом и соответствующим образом отрегулирует угол руля.
Non Follow Up — обычно используется только для целей резервного копирования. Каждый блок рулевого управления имеет один рычаг; при перемещении рычага в одну сторону руль начинает поворачиваться; руль продолжает поворачиваться до тех пор, пока рычаг не будет отпущен или он не достигнет предела своего действия.
Как называют того, кто управляет кораблем?
Рулевой или рулевой — это человек, который управляет кораблем, парусной лодкой, подводной лодкой, морским судном или космическим кораблем другого типа.
Почему угол поворота руля при проверке рулевого управления составляет от 35 до 30 градусов?
Это потому, что точка, в которой он достигается, может быть точно определена, поскольку она пересекает 30 градусов.