Типы приводов — Журнал «Лодка»
Говоря о характеристиках моторной яхты или катера, чаще всего упоминают число лошадиных сил. Но, помимо двигателя, лодке нужен движитель, например гребной винт. А «промежуточное звено» между ними — привод. Для разных типов судов используются разные типы привода, поскольку от их конструкции напрямую зависят ходовые и эксплуатационные характеристики яхты. Вот самые популярные типы приводов на современном яхтенном рынке.
ПРИВОД НА ВАЛ (Shaft drive)
Наиболее простой и, пожалуй, самый распространенный тип привода. Двигатель вращает вал, на конце которого закреплен гребной винт. Позади винта находится перо руля, направляющее поток воды. Самый элементарный вариант вального привода – прямой (direct drive), когда вал идет в корму по прямой от двигателя, расположенного на миделе – ближе к центру корпуса. В плюсе — простота, надежность и достаточно эффективный расход топлива. Недостаток такого решения: на небольших и среднеразмерных яхтах машинное отделение занимает самый широкий и «вкусный» участок нижней палубы, где логично размещать мастер-каюту.
Прямой привод на вал (direct drive)
Эту проблему можно решить угловым приводом (V-drive): двигатель устанавливается в корме, а вал разделен на 2 части: первая идет вперед, соединяясь с редуктором, вторая идет назад от редуктора и заканчивается винтом. Таким образом внутри корпуса освобождается больше полезного обитаемого пространства, но за счет усложнения конструкции КПД падает, и яхта для достижения нужной скорости потребляет больше топлива.
Угловой привод на вал (V-drive)
Из-за конструкции вального привода у таких яхт довольно большая осадка, хотя некоторые производители снижают ее, «утапливая» валолинию в полутуннелях корпуса. А для защиты вала и винтов от столкновения с препятствием на тихоходных водоизмещающих судах нередко можно увидеть скег.
Привод на вал с одинаковым успехом применяется как на водоизмещающих, так и на быстрых глиссирующих яхтах самых разных размеров. На фото: Sunseeker 88 Yacht (26 м)
Плюсы:
- Простота и надежность
- Нетребовательность к сервису
- Широкий диапазон использования — от небольших до очень крупных яхт разных типов: глиссирующих, водоизмещающих и полуводоизмещающих
- Высокий КПД на низких скоростях
- Хорошая курсовая устойчивость и ощущение «сцепления» с водой
Минусы:
- Уязвимость валолинии при столкновении с подводными препятствиями и плавающими объектами
- Приличная осадка судна
- Снижение КПД по мере увеличения скорости
ПОВОРОТНО-ОТКИДНЫЕ КОЛОНКИ (Sterndrive)
По сути, это гибрид стационарного и подвесного мотора. Двигатель устанавливается внутри корпуса, но максимально близко к транцу (срез кормы) – именно поэтому такие колонки называют еще «транцевыми». Вращение передается на колонку, напоминающую «ногу» подвесного мотора. Рули в такой конструкции не нужны: вся колонка с винтом может поворачиваться и откидываться вверх – не так высоко, как подвесной мотор, но все же достаточно, чтобы обезопасить винты на мелководье или заменить винт прямо на воде, без подъема яхты.
Двигатель устанавливается внутри корпуса, но максимально близко к транцу (срез кормы) – именно поэтому такие колонки называют еще «транцевыми». Вращение передается на колонку, напоминающую «ногу» подвесного мотора. Рули в такой конструкции не нужны: вся колонка с винтом может поворачиваться и откидываться вверх – не так высоко, как подвесной мотор, но все же достаточно, чтобы обезопасить винты на мелководье или заменить винт прямо на воде, без подъема яхты.
Поворотно-откидные колонки (Sterndrives)
Поворотно-откидные колонки используются как с бензиновыми, так и с дизельными двигателями. С первыми, в основном, ассоциируется продукция Merсury, со вторыми – Volvo Penta, хотя и бензиновые, и дизельные варианты существуют у обеих компаний (как и собственные линейки совместимых колонок). При выборе варианта следует учитывать габариты и скорость катера. Поскольку поворотно-откидными колонками не оснащают крупные яхты – только среднеразмерные катера и круизеры (примерно до 45 футов/13 м), они довольно чувствительны к весу.
Чаще всего поворотно-откидные колонки можно встретить на прогулочных катерах. На фото: Bayliner 742R
Следует помнить, что катера и яхты с поворотно-откидными колонками (как, кстати, и с подвесными моторами) нельзя использовать для буксировочных видов водного спорта (водные лыжи, вейкборд и особенно вейксерф) из-за опасной для райдеров близости винтов. Исключение составляют колонки с впередсмотрящими тянущими винтами (к примеру, Volvo Penta Forward Drive или Bravo Four S Forward-Facing Drive от Mercury Marine).
Колонка Volvo Penta Forward Drive с впередсмотрящим тянущим винтом
Плюсы
- Отличная маневренность и управляемость
- Расход топлива ниже, чем с валами
- Можно ходить по мелководью
- Компактный моторный отсек
- Устанавливается с бензиновыми и дизельными двигателями
- Богатый выбор гребных винтов, идеально подходящих конкретной лодке
Минусы
- Небольшой ресурс
- Не подходят для водоизмещающих судов — только глиссирующих небольшого и среднего размера
ДНИЩЕВЫЕ КОЛОНКИ (Pod Drive)
Пионером этой технологии стала компания Volvo Penta, первой разработавшая колонки IPS. В отличие от поворотно-откидных, они устанавливаются не на транце, а на днище яхты. Каждая из пары колонок поворачивается независимо, и, что еще интереснее, колонки Volvo Penta IPS располагаются не позади двигателя, а впереди него, поскольку оборудованы не толкающими, а тянущими винтами. Суть такого решения в том, что винты врезаются в спокойную воду: как заявляет производитель, это увеличивает максимальную скорость на 15-20%, при этом снижая расход топлива до 30% по сравнению с яхтой аналогичной длины и энерговооруженности, но оборудованной приводом на вал.
В отличие от поворотно-откидных, они устанавливаются не на транце, а на днище яхты. Каждая из пары колонок поворачивается независимо, и, что еще интереснее, колонки Volvo Penta IPS располагаются не позади двигателя, а впереди него, поскольку оборудованы не толкающими, а тянущими винтами. Суть такого решения в том, что винты врезаются в спокойную воду: как заявляет производитель, это увеличивает максимальную скорость на 15-20%, при этом снижая расход топлива до 30% по сравнению с яхтой аналогичной длины и энерговооруженности, но оборудованной приводом на вал.
Днищевые колонки (Pod drives)
А вот ближайший конкурент Volvo Penta – компания Cummins – считает, что тянущие винты увеличивают профильное сопротивление, создаваемое трением при обтекании привода водой, так что с ростом скорости нарастает и сопротивление. Поэтому свои днищевые колонки Zeus она оснащает более привычными толкающими винтами и также обещает рост скорости на 15% и снижение расхода топлива на треть. Видимо, можно заключить, что похожие результаты обусловлены компромиссом между эффективностью винтов и ростом профильного сопротивления.
На раннем этапе внедрения днищевых колонок считалось, что они подходят для яхт длиной не более 50 футов (около 15 м), но с выпуском все более мощных колонок ими стали оборудовать и значительно более крупные яхты, а также устанавливать не 2, а 3 или даже 4 колонки.
25-метровая модель Dutch Falcon голландской верфи Van der Valk c тройной установкой Volvo Penta IPS 1050
Но самая привлекательная особенность днищевых колонок – возможность легко управлять яхтой при помощи джойстика, что доступно даже новичкам. Больше никаких проблем при швартовке или маневрировании в переполненной марине: яхта легко разворачивается на месте и движется под любым углом – даже боком! Естественно, что при оснащении днищевыми колонками полностью отпадает необходимость в носовых и кормовых подруливающих устройствах.
Плюсы:
- Впечатляющая маневренность и скорость
- Экономичный расход топлива
- Низкий уровень шума и вибрации
- Суперкомпактный моторный отсек: больше обитаемого пространства
Минусы:
- Довольно дорогое обслуживание и требовательность к уровню сервиса
- Осадка больше, чем у поворотно-откидных колонок
- Требуют особой конфигурации днища: нельзя поставить на уже построенную яхту, ориентированную другой тип привода
ВОДОМЕТ (Water Jet)
Эффективность у водомета ниже, чем у гребного винта, однако водометы незаменимы в мелководных и каменистых акваториях, где можно с большой вероятностью остаться без винтов – они первыми принимают на себя удар с подводным или плавучим препятствием.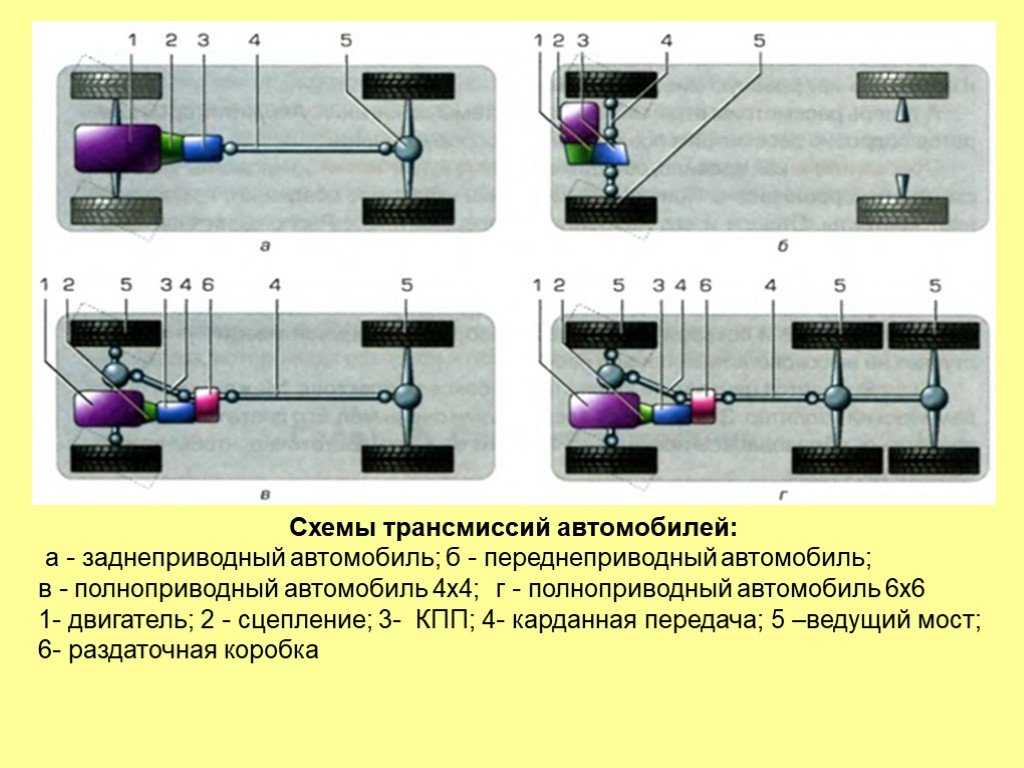 В случае с водометом безопасность вашей лодки ограничена лишь прочностью ее днища.
В случае с водометом безопасность вашей лодки ограничена лишь прочностью ее днища.
Водомет (Waterjet)
Также это популярное решение для водных видов спорта: отсутствие винтов и любых других выступающих вращающихся частей гарантирует безопасность райдера во время буксировки. Почему же тогда множество даже профессиональных буксировочных лодок оборудованы гребными винтами? Дело в том, что у специализированных буксировщиков они находятся глубоко под корпусом — далеко от кормы. А вот буксировка лыжников, вейкбордистов или серферов за обычными прогулочными лодками с подвесными моторами или поворотно-откидными колонками (не Forward Drive), как уже говорилось выше, категорически запрещена.
Среди верфей, строящих крупные яхты, водометам отдает предпочтение итальянская ISA Yachts. На фото: 30-метровая Aldabra (ISA Super Sportivo 100 GTO) с тремя водометными двигателями по 2000 л.с. развивает скорость 55 узлов
Плюсы:
- Отличная управляемость и маневренность
- Возможность экстренного торможения
- Безопасность для людей в воде
- Малая осадка: можно ходить на мелководье и высаживаться на необорудованный берег
- Не передает вибрацию на корпус
Минусы:
- Может забиваться водорослями и мелкими камнями
- К управлению нужно привыкнуть, особенно на низких скоростях
- Если лодка не используется, внутренности водомета быстро обрастают, что приводит к значительной потере скорости
ПРИВОД АРНЕСОНА (Arneson Drive, surface drive)
Этот довольно экзотический привод используется для высокоростных лодок – именно для них он был разработан известным спортсменом-водномоторником Ховардом Арнесоном. Простыми словами суть его конструкции в том, что вал гребного винта помещается в туннеле в корпусе судна и выходит за транец, заканчиваясь большим винтом с особой профилировкой лопастей. Подвижная часть привода крепится к транцу системой цилиндров, позволяющих регулировать положение привода по вертикали (заглубляя или поднимая винты) и по горизонтали, позволяя судну поворачивать. Таким образом, отпадает необходимость в рулях.
Простыми словами суть его конструкции в том, что вал гребного винта помещается в туннеле в корпусе судна и выходит за транец, заканчиваясь большим винтом с особой профилировкой лопастей. Подвижная часть привода крепится к транцу системой цилиндров, позволяющих регулировать положение привода по вертикали (заглубляя или поднимая винты) и по горизонтали, позволяя судну поворачивать. Таким образом, отпадает необходимость в рулях.
Привод Арнесона (Arneson surface drive)
Привод Арнесона – самый популярный, хотя и не единственный вариант аэрируемого привода с полупогружными винтами, работающими не в воде, а на границе воды и воздуха, из-за чего резко падает сопротивление. Скорость при этом возрастает на 15-30%, а расход топлива снижается. За счет того, что винты уходят не под днище, а за корму, уменьшается осадка судна.
Полупогружные винты снижают осадку судна, но выступают далеко за транец
Кроме того, снимается проблема кавитации, актуальная для полностью погруженных винтов на скоростях свыше 40 узлов: сначала из-за высокой скорости вращения поверхность винта начинает активно разрушаться под воздействием образующихся в потоке воды пузырьков. В дальнейшем, когда эти пузырьки, сливаясь, образуют заполненные водяным паром каверны, упор снижается и КПД винта падает на 10-20%. Основным методом борьбы с кавитацией является увеличение площади лопастей и их специальная профилировка – именно этим характеризуются полупогружные винты, используемые с приводом Арнесона. Наконец, большая часть такого привода находится за бортом, освобождая дефицитное пространство внутри корпуса.
В дальнейшем, когда эти пузырьки, сливаясь, образуют заполненные водяным паром каверны, упор снижается и КПД винта падает на 10-20%. Основным методом борьбы с кавитацией является увеличение площади лопастей и их специальная профилировка – именно этим характеризуются полупогружные винты, используемые с приводом Арнесона. Наконец, большая часть такого привода находится за бортом, освобождая дефицитное пространство внутри корпуса.
Pershing 108 с тройной установкой приводов Арнесона
Ну разве не мечта? Почему же тогда привод Арнесона не устанавливается на все подряд катера и яхты? Во-первых, это недешево, в том числе в процессе эксплуатации: обилие подвижных деталей требует квалифицированного сервиса. Во-вторых, винты уязвимы при движении задним ходом. В-третьих, есть чисто психологический эффект: не все готовы купаться в опасной близости от устрашающе огромных винтов. Из-за этого верфи, оборудуя круизные яхты приводом Арнесона, стараются визуально прикрыть винты широкой купальной платформой, хотя это не всегда возможно. Тем не менее, привод Арнесона востребован у любителей высоких скоростей. Нередко «арнесонами» опционально оснащаются весьма крупные быстроходные яхты, такие как Pershing и Mangusta, что позволяет достигать скоростей свыше 50 узлов, особенно в сочетании с газотурбинными двигателями.
Тем не менее, привод Арнесона востребован у любителей высоких скоростей. Нередко «арнесонами» опционально оснащаются весьма крупные быстроходные яхты, такие как Pershing и Mangusta, что позволяет достигать скоростей свыше 50 узлов, особенно в сочетании с газотурбинными двигателями.
Плюсы:
- Высокая скорость при снижении расхода топлива
- Возможность регулировать осадку
- Из-за того, что винты вынесены за корму, уменьшается шум и передача вибраций на корпус
Минусы:
- Психологический дискомфорт: опасная близость к винтам при купании с яхты
- Высокая стоимость покупки и обслуживания
Типы приводов
Типы приводов
Для трех основных рабочих узлов погрузочных машин различают привод и систему управления: рабочего органа, механизма передвижения и передаточных конвейеров. Кроме этого погрузочные машины оборудуются вспомогательными механизмами, предназначенными для выполнения таких операций, как повороты платформы, подъем и опускание приемной плиты, подъем и повороты конвейера, отталкивание вагонеток, опрокидывание бункера и др.
Погрузочные машины с независимым питанием отличаются высокой маневренностью и отсутствием силовых коммуникаций. Поэтому, в частности, аккумуляторные погрузчики и машины с дизельным приводом широко используются на складах, в портах, на железнодорожных станциях и т. д.
Общими недостатками машин с приводом независимого питания являются высокая стоимость энергии, необходимость создания зарядного хозяйства для аккумуляторов, ограниченная емкость аккумуляторных батарей и резервуаров горючего и большие габаритные размеры машин, что ограничивает их применение в стесненных подземных условиях или в судовых трюмах.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Групповой привод погрузочных машин с механическими передачами (например, в машинах типа С-153, Е-100) значительно усложняет конструктивное исполнение машин, их управление и ремонт. Поэтому в современных конструкциях используется главным образом индивидуальный привод каждого рабочего механизма, что отчетливо видно из рассмотрения кинематической схемы мощной погрузочной машины непрерывного действия типа ПНР-1.
Привод рабочего органа I осуществлен от электродвигателя МАД-П/МГ мощностью 65 кет. Строгая синхронизация в работе правой и левой лапы достигается общей кинематической связью редукторов. Приводы приемного конвейера II и перегружателя IV осуществлены от четырех однотипных электродвигателей А051-4 с номинальной мощностью каждого 4,5 кет. Каждая гусеница оборудована индивидуальным приводом III от электродвигателя АОС63-4/2 мощностью 14 кет.
Индивидуальный привод не лишен существенных недостатков, к которым следует отнести большую установленную мощность двигателей, усложнение электрической схемы машин, повышенные требования к электрическому оборудованию, воспринимающему высокие динамические нагрузки непосредственно от рабочих механизмов. Указанные недостатки устраняются в погрузочных машинах, оборудованных групповым приводом с гидравлическими трансмиссиями. На машине типа ТПГР-1 (Торецкий машиностроительный завод) установлена гидравлическая станция, оборудованная насосами высокого давления типа Н-403 и электродвигателя типа КОФ41-4. Рабочая жидкость под давлением подводится ко всем механизмам машины (гребково-роторному рабочему органу, механизму передвижения, конвейерам и др.), осуществляя привод последних с помощью гидромоторов или гидроцилиндров.
Рабочая жидкость под давлением подводится ко всем механизмам машины (гребково-роторному рабочему органу, механизму передвижения, конвейерам и др.), осуществляя привод последних с помощью гидромоторов или гидроцилиндров.
Все отечественные шахтные погрузочные машины имеют электрический или пневматический привод; в наземных машинах преимущественно используются двигатели внутреннего сгорания. Начатые опытно-конструкторские работы указывают на полную возможность создания унифицированных ковшовых машин прямой погрузки с взаимозаменяемым электрическим и пневматическим приводом. Пневматические двигатели типа ДРП-16, которые изготовляются на заводе «Пневматика», являются взаимозаменяемыми с электрическими двигателями типа КТСВ 110/775М, применяемыми в погрузочных машинах ЭПМ. Такими двигателями снабжаются унифицированные машины типа МПУ-1.
Рис. 1. Кинематическая схема погрузочной машины типа ПНР-1.
Рис. 2. Схема рабочих механизмов погрузочной машины типа ПМС.
В связи с этим для каждой модели машин в соответствии с условиями их возможного применения должен быть рассмотрен вопрос о целесообразном типе привода и принято то или иное сочетание взаимозаменяемых типов привода (электрический, пневматический или дизельный). Как показывает опыт эксплуатации, для многих моделей шахтных погрузочных машин непрерывного действия с высокой производительностью и высокой частотой цикла работы погрузочного механизма должен быть использован только наиболее надежный и дешевый электропривод, а для наземных машин, работающих на больших складских или строительных площадках, — только дизельный привод.
Для электрического привода рабочих механизмов погрузочных машин применяются главным образом асинхронные электродвигатели общего назначения в закрытом обдуваемом исполнении с короткозамкнутым ротором. Для привода рабочих органов используются асинхронные двигатели того же исполнения с повышенным скольжением. Наземные погрузочные машины часто оборудуются электроприводом постоянного тока; при этом используются только сериесные двигатели.
Наиболее предпочтительным типом привода современных погрузочных машин является электрогидравлический как наиболее надежный, обеспечивающий плавное регулйрование усилий и скорости рабочих элементов машин и хорошо увязывающий работу основных (рабочий орган) и вспомогательных (гидроцилиндры подъема и поворота) элементов погрузочной машины. В погрузочных машинах, оборудованных гидравликой, для привода рабочих механизмов применяются гидравлические цилиндры и гидродвигатели. Так в гребковых погрузочных машинах типа ПМС цилиндры служат для подъема и опускания рукоятки цилиндры для складывания и выбрасывания гребка; цилиндры осуществляют подъем и опускание всего питателя цилиндр поворачивает платформу с питателем вправо и влево от среднего положения, что обеспечивает необходимый фронт погрузки у колесно-рельсовых машин и сокращает объем маневровых операций у машин на гусеничном ходу. Цилиндры поднимают и опускают перегружатель, а—9 поворачивают перегружатель в горизонтальной плоскости.
Размещение левого цилиндра на питателе погрузочной машины типа ПМС-2 видно на рис. 3. Корпус цилиндра укреплен шарнирно на раме конвейера, а шток закреплен на рукояти. При подаче масла в нижнюю полость цилиндра рукоять поднимается. Опускание гребка под действием собственного веса легко выполняется при помощи специальных гидравлических клапанов в системе.
Типовая конструкция гидроцилиндра (погрузчика Т-157) представлена на рис. 4. Гидроцилиндр состоит из гильзы, крышки с воздухоспускным клапаном, ступицы, уплотнительных манжет, штока с поршнем и уплотнительными манжетами
7. Манжеты изготовлены из маслостойкой резины. Цилиндры цапфами шарнирно устанавливаются в подшипниках верхней части опоры.
Рабочее давление масла в гидравлических системах погрузочных машин обычно принимается в пределах 80—120 кГ/см2, что диктуется высокими усилиями, характерными для рабочих механизмов и ограниченными габаритными размерами машин.
Для вращения рабочих механизмов (ходовой части, погрузочных органов, конвейера и т. д.) используются гидродвигатели. Гидродвигатель типа НПА-64, используемый для привода нагребающих лап погрузочной машины УП-2, состоит из разъемного корпуса, в котором размещены на подшипниках приводной вал, блок гидроцилиндров и маслораспреде-лительный механизм. Масло, подводимое под давлением к входному штуцеру, поступает в кольцевой канал распределительного механизма и далее — в рабочую полость цилиндров. Поршень со штоком перемещаясь поступательно, упирается сферической опорой в шайбу, размещенную под углом к плоскости цилиндров. Благодаря этому осуществляется поворот шайбы с валом. Распределительный механизм механически карданом связан с валом, вращается с ним вместе, и масло последовательно поступает в цилиндры, обеспечивая непрерывное вращение вала.
д.) используются гидродвигатели. Гидродвигатель типа НПА-64, используемый для привода нагребающих лап погрузочной машины УП-2, состоит из разъемного корпуса, в котором размещены на подшипниках приводной вал, блок гидроцилиндров и маслораспреде-лительный механизм. Масло, подводимое под давлением к входному штуцеру, поступает в кольцевой канал распределительного механизма и далее — в рабочую полость цилиндров. Поршень со штоком перемещаясь поступательно, упирается сферической опорой в шайбу, размещенную под углом к плоскости цилиндров. Благодаря этому осуществляется поворот шайбы с валом. Распределительный механизм механически карданом связан с валом, вращается с ним вместе, и масло последовательно поступает в цилиндры, обеспечивая непрерывное вращение вала.
Рис. 3. Размещение гидроцилиндра на питателе погрузочной машины ПМС-2.
Высокомоментные радиально-поршневые гидродвигатели типа ВГД-410 установлены на привод гусеничного хода погрузочной машины ПНБ-3 (институт Гипроуглемаш). Крутящий момент на валу двигателя при давлении масла 100 кГ/см2 достигает 480 кГм, а максимальная скорость вращения вала не превышает 110 об/мин, что позволяет использовать двигатели в упрощенной безредукторной схеме.
Крутящий момент на валу двигателя при давлении масла 100 кГ/см2 достигает 480 кГм, а максимальная скорость вращения вала не превышает 110 об/мин, что позволяет использовать двигатели в упрощенной безредукторной схеме.
Рис. 4. Гидравлический цилиндр.
Пневматический привод используется для шахтных погрузочных машин по условиям безопасности (в шахтах, особо опасных по газу) или же в тех случаях, когда весь комплекс проходческого оборудования работает на сжатом воздухе.
В погрузочных машинах применяются поршневые и ротационные пневматические двигатели. Отечественные серийные машины оборудуются поршневыми пневматическими двигателями типа МП-5 или ДР-10. Двигатель для удобства монтажа изготовляется во фланцевом исполнении. В корпусе I укреплены болтами пять рабочих цилиндров, расположенных по окружности под углом 72° друг к другу. В каждом цилиндре помещен поршень с кольцами. Для превращения возвратно-поступательного движения поршней двигатель оборудован кривошипно-шатунным механизмом, состоящим из шатунов и коленчатого вала.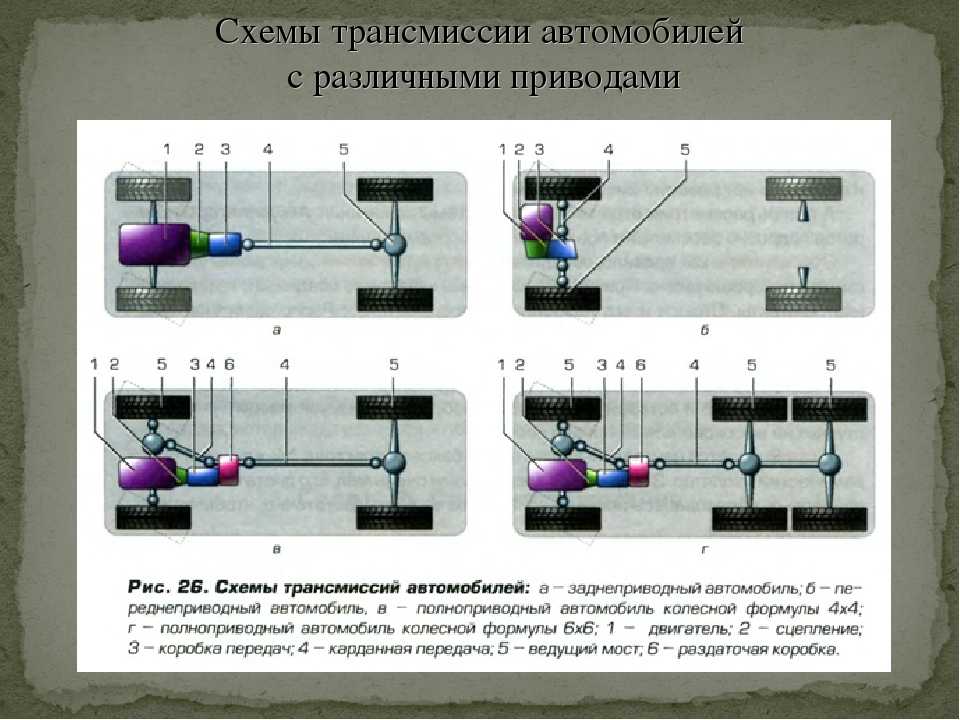 Каждый шатун головкой соединен пальцем с поршнем, а ножкой опирается на вкладыш. Коленчатый вал монтируется на двух шарикоподшипниках, укрепленных в корпусе и крышке. Конец коленчатого вала со стороны фланца имеет шлицевое отверстие, в которое входит вал редуктора погрузочной машины.
Каждый шатун головкой соединен пальцем с поршнем, а ножкой опирается на вкладыш. Коленчатый вал монтируется на двух шарикоподшипниках, укрепленных в корпусе и крышке. Конец коленчатого вала со стороны фланца имеет шлицевое отверстие, в которое входит вал редуктора погрузочной машины.
Для распределения сжатого воздуха по рабочим цилиндрам на двигателе смонтировано золотниковое устройство, состоящее из втулки, распределительного валика и коробки золотника. Золотник приводится во вращение коленчатым валом, сжатый воздух через каналы и прорези поступает в цилиндры или выходит из них.
Рис. 5. Гидродвигатель НПА-64.
С 1960 г. заводом «Пневматика» серийно выпускается двигатель ДР-10у мощностью до 12 л. е., спроектированный на базе двигателя ДР-10. Все основные узлы и детали унифицированы с двигателями ДР-5у и ДР-13. Для новых погрузочных машин МПУ-1 создаются более мощные двигатели типа ДРП-16, имеющие большие сечения каналов, подводящих сжатый воздух к цилиндрам. Мощность двигателя 16 л. с. при 670 об/мин выходного вала. На заводе «Коммунист» изготовляются двигатели МП-18 мощностью 18 л. с. и номинальным числом оборотов 600 в минуту, предназначенные для ковшово-конвейерных тяжелых машин типа ПМЛ-8.
Основными тенденциями развития конструкций пневматических двигателей погрузочных машин являются увеличение мощности, усовершенствование конструкций воздухораспределения и повышение коэффициента полезного действия.
Ротационные двигатели проще по конструкции и меньше по размерам по сравнению с поршневыми, так как в них отсутствует кривошипно-шатунный механизм, а также ‘золотниковое воздухо-распределение. Недостатком ротационных двигателей является недостаточное уплотнение рабочих камер, быстрый износ лопаток и шум при работе.
Дизельный привод имеет особое значение применительно к машинам, предназначенным для геологоразведочных работ, а также для мощных ковшовых машин, работающих в камерах большого сечения, где затруднительна подводка к машине и малонадежна эксплуатация силовых коммуникаций (кабелей и воздухопроводов).
Рис. 6. Пневматический двигатель типа ДР-10.
Для наземных погрузочных машин обычно используются стандартные автотракторные двигатели внутреннего сгорания (карбюраторные или дизели). Недостатками их являются: чувствительность двигателя к неизбежным кратковременным перегрузкам, возникающим при погрузке насыпных грузов; сложность запуска двигателя при температуре ниже нуля; отсутствие плавного регулирования скорости; большая стоимость ремонта и эксплуатации.
Для подземных погрузочных машин необходимо создать специальные двигатели внутреннего сгорания левую часть приемной плиты по шарниру вместе с лапами и их приводами. Таким образом обеспечивается необходимый фронт захвата нагребающих лап при минимальной транспортной ширине машины.
Рис. 7. Привод рабочего органа погрузочной машины УП-2.
Верхняя крышка редуктора, закрепленная на болтах, открывает свободный доступ к шестерням и подшипникам, которые размещены в масляной ванне, а выходной вал внизу имеет Манжетное уплотнение. Лапы закреплены шарнирно, поэтому не наблюдается заклинивание материала при обратном движении лап.
Рис. 8. Редуктор привода лап погрузочной машины ПНР-1.
Индивидуальный гидропривод нагребающих лап значительно улучшает рабочую характеристику и позволяет уменьшить ширину машины. Однако недостатком схемы является нарушение синхронизации движения лап.
Для синхронизации движения парных рабочих органов (лап, дисков) их привод обычно осуществляется от общего редуктора. Конструкция редуктора привода правой лапы погрузочной машины типа ПНР-1 видна на рис. 8.
Аналогичный по конструкции редуктор расположен с левой стороны приемной плиты. Оба редуктора кинематически связаны общим валом, который передает движение на конические шестерни и далее через две пары цилиндрических шестерен на приводные диски лап. Редуктор размещается под приемной плитой, на уровень которой выводится лишь диск с пальцем для сообщения движения непосредственно лапе. Шестерни заключены в литой разъемный корпус.
Доступ к редуктору при такой компоновке усложняется, однако исключается опасность заклинивания кусков насыпного груза.
В связи с тем, что привод парных рабочих органов расположен в непосредственной близости к штабелю насыпного груза, повышаются требования к защите корпуса редуктора от попадания пыли и влаги. Это достигается с помощью лабиринтных и манжетных уплотнений.
Рис. 9. Кинематическая схема привода ковша погрузочной машины ПМЛ-8М.
В наиболее распространенных погрузочных машинах с ковшом; на катящейся рукояти привод рабочего органа осуществляется при помощи механических редукторов. На рис. 9 приведена кинематическая схема привода ковша погрузочной машины типа ПМЛ-8М. На закрепленном болтами к поворотной платформе корпусе редуктора прифланцован двигатель типа МП-18.
Редуктор обычно состоит из двух пар цилиндрических шестерен, снижающих число оборотов выходного вала, на котором располагается бобина на последнюю навивается многорядная пластинчатая цепь. Противоположный конец цепи закреплен к кулисам ковша; поэтому когда цепь наматывается на бобину, ковш поднимается. Опускание ковша происходит под действием силы тяжести..
Для электропривода особенно характерны динамические знакопеременные нагрузки, поэтому в электрических ковшовых погрузочных машинах применяются двигатели кранового типа, устанавливают фрикционные муфты и предусматриваются специальные пружинные предохранительные устройства.
Отмеченные недостатки отсутствуют в случае привода ковша от силовых пневматических цилиндров. На рис. 10 представлена схема привода погрузочной машины типа МПДР-0,12. Силовой пневматический цилиндр закреплен на цапфах, шток соединен с шарнирной рукоятью ковша. При включении сжатого воздуха ковш поворачивается вначале относительно нижнего шарнира, а затем — верхнего шарнира. В конце движения ковш разгружается в бункер. Подвеска цилиндра позволяет использовать его для разгрузки бункера. Ковш фиксируется в верхнем положении, открывается защелка бункера и при подаче сжатого воздуха в цилиндр бункер опрокидывается относительно шарни для разгрузки.
Рис. 10. Схема привода ковша и бункера погрузочно-доставочной машины МПДР-0,12.
Для увеличения усилий принят цилиндр со сдвоенными поршнями (рис. 11). Корпус цилиндра состоит из двух половин, соединенных жесткой перемычкой. На штоке закреплены поршень одностороннего действия и поршень двухстороннего действия. При подаче сжатого воздуха через вводы в левые полости цилиндра шток перемещается направо под действием удвоенных усилий, обеспечиваемых поршнями. Осуществляется вырыв ковша из штабеля насыпного груза. Поскольку для опускания ковша не требуется больших усилий, сжатый воздух подается через ввод в правую полость цилиндра над поршнем, левые же полости обеих половин цилиндров соединяются с атмосферой и шток под действием поршня перемещается влево.
Рис. 11. Силовой цилиндр машины МПДР-12.
В ковшовых машинах ступенчатой погрузки ковш укреплен шарнирно на рукояти при помощи двух корабельных цепей, которые наматываются на барабаны. При одновременном включении двух барабанов ковш поднимается в вертикальной плоскости. Опускание ковша происходит под действием силы тяжести.
Рис. 12. Привод рабочего органа погрузочной машины ППМ-5.
Механизм подъема ковша представляет собой два одинаковых планетарных редуктора, смонтированных на общем валу. Вращение барабану передается через ведущие шестерни, сателлитные шестерни, зубчатый венец. При торможении ленточным тормозом корпуса редуктора подъемный барабан приводится в движение. В расторможенном состоянии сателлитные шестерни совершают планетарные движения, свободно перекатываясь по внутренней шестерне зубчатого венца и ведущей шестерне.
Привод вибрационных лотков, захватывающих и транспортирующих насыпной груз, может осуществляться от гидровибраторов или от эксцентриковых механизмов. Конструкция приводного вала вибрационного лотка машины типа 2ПНВ-1 приведена на рис. 13. Приводной вал укреплен в роликовых подшипниках на опорах. Вращение от двигателя передается клиноременной передачей на шкив. Если включается фрикционная муфта при помощи механизма, то движение передается на приводной вал. На обоих концах вала размещены в подшипниках эксцентрики, сообщающие шатунам колебательные движения. Шатуны связаны непосредственно с вибрационным лотком.
Привод ходового механизма наиболее простое конструктивное решение имеет при колесно-рельсовом ходе погрузочной машины. Для получения максимальных напорных усилий все колеса рельсовых погрузочных машин выполняются приводными (ведущими), поэтому рамой машины чаще всего служит корпус редуктора. В качестве примера на рис. 14 представлен редуктор ходовой части машины 2ПНВ-1. Фланцевый электродвигатель укреплен непосредственно на корпусе редуктора. Движение от вала двигателя передается через четыре пары цилиндрических шестерен, понижающих число оборотов на приводной вал. Полускаты связаны с приводным валом закрытыми цепными передачами. Для отключения полускатов от двигателя, что бывает необходимо при транспортировании машины, редуктор снабжен кулачковыми муфтами. Эти же муфты обеспечивают включение маневровой и рабочей скорости движения машины.
Рис. 13. Привод вибрационного лотка погрузочной машины 2ПНВ-1.
В целях унификации и упрощения обслуживания мощность и марка ходового двигателя в отечественных погрузочных машинах часто принимается той же, что и для привода рабочего органа. В некоторых зарубежных конструкциях погрузочных машин мощность двигателя рабочего органа на 20—25% выше мощности двигателя ходового механизма; такое решение обеспечивает более надежное черпание и вывод ковша из штабеля.
Привод ходовой части современных гусеничных погрузочных машин осуществляется чаще отдельными двигателями на каждую гусеницу через индивидуальные редукторы, что упрощает управление при поворотах машины; кроме того, уменьшаются габариты и значительно облегчаются монтаж и ремонт машин. На рис. 15 помещена конструктивная компоновка редуктора ходовой части погрузочной машины типа УП-2.
Рис. 14. Редуктор ходовой части погрузочной машины 2ПНВ-1.
Каждая гусеница приводится от самостоятельной кинематической цепи редуктора. От приводной конической шестерни, связанной с двигателем, движение передается через две пары цилиндрических шестерен на звездочку гусеничного хода. Шестерни обеих передач размещены в общем корпусе, который используется в качестве рамы ходовой части.
Гусеничная ходовая часть малогабаритных погрузочных машин иногда компонуется в виде двух самостоятельных узлов, состоящих из двигателя, редуктора и гусеницы. При использовании общего двигателя на две гусеницы включение каждой из них производится через фрикционные муфты.
Привод пневмо-шинного хода погрузочных машин общего назначения, работающих на складах и в портах, обычно выполняется на базе серийных конструкций автомобилей или тракторов, В качестве двигателей пневмошинного хода используются электродвигатели или двигатели внутреннего сгорания. Наиболее прогрессивным решением является встроенный в колеса индивидуальный привод, отличающийся наибольшей компактностью, простотой монтажа и замены.
Привод передаточных конвейеров погрузочных машин осуществляется с отбором мощности от двигателя рабочего органа или от индивидуальных двигателей. В последних конструкциях погрузочных машин привод конвейеров обычно осуществляется от 212 двух двигателей небольшой мощности, что обеспечивает компактную конструкцию и удобное обслуживание машины.
Рис. 5. Редуктор ходовой части погрузочной машины УП-2.
Один из приводов пластинчатого конвейера погрузочной машины ПНР-1 приведен на рис. 6. Фланцевый электродвигатель мощностью 4,5 кет прикреплен болтами к корпусу редуктора. От двигателя движение передается через коническую передачу и две пары цилиндрических шестерен, снижающих число оборотов вала, который муфтой соединяется с пршюдрым валом конвейера. Редуктор размещается непосредственно на раме конвейера.
Рис. 6. Привод пластинчатого конвейера погрузочной машины ПНР-1,
При установке на машине двух тарвейеров для привода перегружателя, как правило, используется отдельной двигатель, который обычно размещается на стреле, около разгрузочной головки. Приводной барабан ленточных конвейеров иногда размещается ближе к месту крепления рамы конвейера и корпусу машины.
Приводы конвейеров работают в лучших условиях по сравнению с приводами рабочего органа и ходового механизма погрузочных машин, так как они не испытывают столь высоких динамических усилий. Механическая защита конвейерных двигателей обычно не предусматривается.
Поворот платформы с рабочим органом погрузочных машин с рельсовым перемещением осуществляется на 30—45° от продольной оси для погрузки породы с боков выработки. Платформа ковшовых погрузочных машин обычно поворачивается вручную в рабочее положение, а специальный механизм автоматически возвращает платформу с заполненным ковшом в центральное положение. Поворотный механизм состоит из барабана с профильным вырезом, рычага, соединенного с кулисой, и ролика, закрепленного на ходовой части машины. При опущенном положении ковша ролик размещен в широкой части выреза барабана, поэтому платформа может свободно поворачиваться. Одновременно с подъемом ковша ролик обегает профилированный скос барабана, поворачивая верхнюю часть машины в центральное положение.
В последних моделях ковшовых машин поворот платформы механизирован. Привод поворотного механизма состоит из 2—3 ступенчатых редукторов с пневмо- или гидроцилиндрами, а в отдельных конструкциях с индивидуальными двигателями.
Рис. 7. Привод поворотного механизма погрузочной машины ПМЛ-5М.
На рис. 7 помещена конструкция привода поворотного механизма погрузочной машины
Привод состоит из двух пневматических цилиндров, рычага, шарнирно закрепленного на двух полуосях и стопорного цилиндра. В зависимости от того, в какой цилиндр подводится сжатый воздух, происходит поворот платформы вправо или влево. Шток стопорного цилиндра под действием пружины фиксирует положение платформы. При подаче сжатого воздуха в нижнюю полость стопорного цилиндра шток поднимается, отсоединяя поворотную платформу от ходовой части. Возврат платформы в центральное положение автоматически выполняется этими же пневмоцилиндрами благодаря специальной блокировке кранов управления.
Погрузочные машины непрерывного действия чаще имеют гидравлическую систему для выполнения вспомогательных операций, поэтому повороты платформы осуществляются гидроцилиндрами. В погрузочных машинах с колесно-рельсовым передвижением часто устанавливаются дополнительные цилиндры для отталкивания загруженных вагонеток, для разравнивания породы в кузове вагонетки и других операций.
В чем разница между типами дисков?
Транспортное средство может иметь четыре типа трансмиссии: передняя, задняя, четырехколесная и полноприводная. У каждого типа есть свой набор преимуществ и недостатков, которые могут быть единственной разницей в том, что вы решите купить, в зависимости от ваших привычек вождения. Здесь мы обсудим разницу между типами дисков, а также плюсы и минусы каждого из них.
Разница между типами привода
Проще говоря, трансмиссия вашего двигателя — это система, которая соединяет трансмиссию вашего автомобиля с его осями, передавая мощность двигателя на колеса. Термины «передний», «задний», «4-колесный» и «все колеса» относятся к тому, какие колеса получают мощность.
Передний
Большинство современных автомобилей — переднеприводные. Этот тип автомобиля оснащен трансмиссией, которая приводит в движение два колеса в передней части автомобиля. У этого типа трансмиссии есть несколько преимуществ, в том числе:
- Топливная эффективность: Ведущие мосты в переднеприводных автомобилях короче, чем их братья и сестры, поскольку их не нужно соединять с задней частью автомобиля. . Это позволяет уменьшить вес автомобилей и сократить количество поездок на заправку.
- Менее затратный: Этот тип привода менее сложен по сравнению с другими и дешевле в производстве для производителей. Кроме того, для потребителей дешевле обслуживать автомобиль в течение всего срока службы.
- Хорошо работает в различных погодных условиях: Автомобили с передним приводом сохраняют хорошее сцепление с мокрой поверхностью, снегом, песком, гравием и т. д. Этот тип привода также снижает вероятность «рыбьего хвоста» вашего автомобиля, что чаще встречается в автомобилях с задним приводом.

Несмотря на эти преимущества, у переднеприводного автомобиля есть несколько недостатков.
- Управление крутящим моментом может привести к уводу автомобиля в одну или другую сторону при быстром ускорении.
- Радиус поворота автомобиля намного больше, чем у других типов приводов, потому что под передней частью автомобиля не так много места.
- Ваши передние шины могут изнашиваться быстрее, чем другие типы приводов, поскольку они несут общий вес двигателя, трансмиссии и трансмиссии, а также должны амортизировать ежедневное торможение, ускорение и рулевое управление.
- Системы переднего привода могут работать не так долго, как приводы других типов.
Задняя часть
В заднеприводных автомобилях двигатель расположен в передней части автомобиля и передает мощность на задние колеса автомобиля или грузовика. У заднеприводных автомобилей есть несколько преимуществ, в том числе:
- Отличное ускорение с места: Заднеприводные автомобили не подвержены влиянию крутящего момента, как их переднеприводные собратья, обеспечивая превосходную управляемость при ускорении с места. полная остановка. Этот аспект делает автомобили с задним приводом лучшим выбором для автомобилей с высокими характеристиками.
- Увеличенный радиус поворота: Поскольку ведущие колеса автомобиля расположены сзади и не должны делить пространство с двигателем и передней подвеской, они могут поворачивать более резко, чем автомобили с передним приводом.
- Повышенная грузоподъемность: Дополнительный вес на задние колеса увеличивает тяговое усилие автомобиля, что идеально подходит для пикапов.
Есть некоторые недостатки, которые следует учитывать, когда речь идет о заднеприводных автомобилях.
- Эти автомобили менее эффективны в суровых условиях, особенно в снегу, так как они чаще застревают. Они также с большей вероятностью будут ловить рыбий хвост на мокрой поверхности.
- Они не так экономичны, как автомобили с передним приводом.
4-колесный
Как следует из названия, полноприводные автомобили оснащены трансмиссией, предназначенной для передачи мощности на все четыре колеса. Транспортное средство может быть спроектировано так, чтобы иметь систему полного или неполного рабочего дня; неполный рабочий день предлагает водителю дополнительный выбор для переключения между задним и полным приводом в зависимости от его потребностей. Есть несколько преимуществ полноприводных автомобилей, в том числе:
- Превосходные внедорожные качества: Эти автомобили не имеют себе равных в условиях бездорожья.
- Превосходная тяговая способность: Полноприводные автомобили оснащены усиленной подвеской, идеально подходящей для буксировки как по дорогам, так и по бездорожью.
- Превосходные характеристики в ненастную погоду: полноприводные автомобили превосходны в любых условиях вождения, особенно в снежных и влажных условиях.
При этом следует учитывать несколько недостатков полноприводных автомобилей.
- Вес автомобиля снижает расход топлива. Полноприводные автомобили
- требуют более частого обслуживания, чем автомобили с полным приводом, из-за количества компонентов в автомобиле.
- Полноприводные автомобили дороже полноприводных.
Все колеса
Хотя полноприводные и полноприводные типы могут звучать как разные термины для одного и того же, они работают немного по-разному и достаточно различны, чтобы считаться отдельной категорией.
Полноприводные (AWD) автомобили работают с бортовым компьютером для непрерывной передачи мощности между колесами в зависимости от того, где она больше всего нужна, будь то быстрое ускорение или реакция на мокрую или снежную погоду. У автомобилей с полным приводом есть несколько преимуществ, в том числе:
- Отличные характеристики в ненастную погоду: Поскольку мощность направляется туда, где она больше всего нужна, автомобили с полным приводом обеспечивают отличную производительность в плохих условиях вождения.
- Универсальность: полноприводные автомобили одинаково хорошо работают как на бездорожье, так и на городских улицах, что идеально подходит для водителей, которые регулярно используют оба типа вождения.
Однако у полноприводных автомобилей есть некоторые недостатки.
- Как и полноприводные автомобили, полноприводные автомобили тяжелее и требуют больше топлива для работы. Автомобили с полным приводом
- могут требовать более частого обслуживания, чем полноприводные автомобили. Полноприводные автомобили
- стоят дороже, чем автомобили с передним или задним приводом.
Если вам нужно починить трансмиссию вашего автомобиля или вы хотите получить профилактическое обслуживание, чтобы поддерживать ваш автомобиль в отличной форме, T3 Atlanta здесь и готов предоставить обслуживание, которого заслуживает ваш автомобиль. Позвоните нам в наш удобный офис в Смирне или Декейтере, и мы забронируем для вас быстрое и дружелюбное обслуживание уже сегодня.
RWD, FWD, AWD, 4WD | Объяснение автомобильных трансмиссий Блог GoMechanic
Трансмиссии — задний привод, передний привод, полный привод, полный привод, какой привод?
[yop_poll id=”4″]
Вы, наверное, много раз слышали эти жаргоны и задавались вопросом, что же они означают? Мы очень хорошо понимаем вашу нерешительность с этим беспорядочным набором слов и трансмиссий, которые действительно сбивают с толку. GoMechanic здесь, чтобы очистить воздух от Drivetrains и избавиться от любой дезинформации, окружающей его.
Для тех, кто не разбирается в автомобилях, есть 4 типа компоновки трансмиссии. Их имена ясно указывают на их ориентацию:
- RWD или Задний привод
- Передний привод или Передний привод
- Полный привод или Полный привод
- Полный привод или Полный привод
У каждой из этих трансмиссий есть свои достоинства и недостатки, и мы кратко рассмотрим их все.
Все становится просто; Двигатель передает мощность, которую необходимо передать дороге. Автопроизводители разрабатывают геометрию для конкретного типа автомобиля, скажем, хэтчбека или седана. Наконец, подходящая трансмиссия реализована для колес, получающих мощность от двигателя.
Обычно это FWD для небольших городских автомобилей и экономичных седанов, RWD для внедорожников и легковых автомобилей, AWD для высококачественных внедорожников премиум-класса и 4WD для специально созданных внедорожников, таких как Land Rover и Land Cruisers.
Каждый тип трансмиссии оказывает значительное влияние на динамику движения данного автомобиля.
Давайте обсудим четыре трансмиссии более подробно.
Переднеприводная система является наиболее распространенной в автомобильной промышленности, в которой для привода автомобиля используются передние колеса. Это наиболее практичный выбор для большинства современных водителей. Идея переднеприводной компоновки заключается в экономии места в салоне, поэтому на большинстве современных переднеприводных автомобилей вы не увидите выступа на полу. Мы можем сказать, что FWD — это самая загруженная и наиболее сложная компоновка из четырех, поскольку она должна выполнять три вещи одновременно, то есть рулевое управление, управление колесами и торможение.
Передний привод | Преимущества Конфигурация с передним приводом имеет некоторые преимущества по сравнению с задним приводом, так как полная масса автомобиля приходится на переднюю часть, что, в свою очередь, обеспечивает большее сцепление с передним колесом. мощность, следовательно, больше сцепления с дорогой.
FWD также выделяется с точки зрения производства, поскольку его производство значительно дешевле, и с каждым днем он становится все более популярным и становится все более рентабельным. 9Установка 0163 с передним приводом также легче и, в свою очередь, способствует экономии топлива. FWD обычно используется в городских автомобилях и экономичных люках.
Факт: Помешанная Honda Civic Type-R 2018 года — переднеприводной хэтчбек.
Передний привод | НедостаткиУ популярного привода FWD есть недостаток, известный как Torque Steering. Из-за характера установки, которая нагружает его тремя задачами, FWD может страдать от жесткого рулевого управления по крутящему моменту, что означает, что мощность двигателя перегружает передние колеса, что ощущается, когда автомобиль подвергается резкому ускорению, и рулевое управление выходит из строя.
Рулевое управление по крутящему моменту заставляет автомобиль самостоятельно поворачивать влево или вправо под воздействием крутящего момента, передаваемого двигателем. Но с постоянно развивающимися современными технологиями FWD становятся умнее и проворнее.
Энтузиасты поклоняются заднему приводу, это самый почитаемый из всех четырех комплектаций. RWD или то, что мы любим называть его «Правый привод», — это самая проверенная и надежная установка трансмиссии из всех. В этой геометрии заднее колесо выполняет ведущую роль, а переднее колесо берет на себя рулевое управление. Как говорит Танос: «Идеально сбалансирован».
Задний привод | ПреимуществаЗадний привод творит чудеса с автомобилем, и если вы заметите, что существует идеальная симфония между передними и задними колесами, когда задние толкают, а передние управляют, следовательно, нет рулевого управления по крутящему моменту, что обеспечивает более активное и динамичное вождение. Таким образом, RWD может выдерживать большую мощность по сравнению с FWD.
Это также обеспечивает разработку для настройки подвески и общей конфигурации автомобиля. RWD обычно используется во внедорожниках, роскошных седанах премиум-класса и спортивных автомобилях.
Есть проблемы с задним приводом. Он обеспечивает меньшее сцепление на скользких и неблагоприятных для протектора дорожных покрытиях. RWD также относительно дорог в производстве и обслуживании.
Полный привод (AWD)Полный привод выводит трансмиссию на новый уровень. Вместо того, чтобы использовать мощность двигателя на задних или передних колесах, мощность передается на все четыре колеса. С полным приводом возникает проблема, на какое колесо из четырех должна передаваться мощность и сколько?
Полный привод | Преимущества В зависимости от системы в полноприводном автомобиле мощность можно эффективно регулировать и распределять по каналам для обеспечения оптимальной тяги в любое время. В большинстве систем мощность передается на передние колеса в случае резкого ускорения и на задние, если требуется лучшая устойчивость на поворотах. Полный привод также использует систему контроля тяги, которая помогает достичь оптимальной жесткости при вождении.
Системы полного привода особенно полезны в быстро меняющихся дорожных условиях. А раздаточный узел , расположенный в середине автомобиля, отвечает за передачу мощности на каждое колесо по своему усмотрению. Собственный Audi QUATTRO — исключительный вариант полноприводной трансмиссии.
Полный привод | НедостаткиНедостатки AWD заключаются в сложности производственного процесса. Полноприводные автомобили также дороги в ремонте и обслуживании.
Полный привод (4WD)В спецификациях AWD и 4WD отображаются одинаково, и в любое время оба эти термина используются взаимозаменяемо. Обе эти конфигурации используют все четыре колеса для тяги. 4WD также известен как 4X4.
Основное различие между ними заключается в гибкости, которую предлагает 4WD. 4WD предназначен для более активного вождения. Это позволяет водителю настраивать детали характеристик вождения автомобиля, обеспечивая более увлекательный опыт, поэтому 4WD в первую очередь используется на специально построенных внедорожниках и внедорожниках, которым требуется управляемость на ходу для тяжелого бездорожья, преодоления валунов, переход вброд, крутые подъемы, низкие требования к тяге.
Большинство полноприводных автомобилей имеют высокий и низкий диапазон передач; последний используется для увеличения мощности набора высоты на малых скоростях. У некоторых есть дифференциалы (которые позволяют левому и правому колесам, а также передней и задней оси вращаться с разной скоростью), которые можно заблокировать для максимального сцепления с дорогой. Большинство 4WD работают через второе переключение передач или через кнопку в случае современных автомобилей.
4WD считается святым Граалем среди серьезного сообщества любителей бездорожья благодаря настраиваемым характеристикам вождения.