Датчик линейного ускорения кратко, Ардашева
Методология построения измерительных преобразователей линейного ускорения
Применение данных устройств основано на их способности преобразования статического и динамического ускорения в электрическую величину (емкость, сопротивление, напряжение и др.)
Схематично, параметры, измеряемые датчиками ускорения, можно сгруппировать в следующие классы:
-измерение вибрации: объект вибрирует, если он производит колебательные движения относительно положения равновесия
-измерение ударных ускорений: внезапное возбуждение структуры, создающее резонанс.
-измерение движения: медленное перемещение со скоростью от доли секунды до нескольких минут.
-сейсмоисследования: измерения малых перемещений и низкочастотной вибрации.
Принцип работы датчиков ускорения
можно описать следующим образом.
Датчик ускорения состоит из чувствительного элемента (ЧЭ) и подсоединенного к нему преобразователя механического смещения. ЧЭ представляет собой инерциальную массу, закрепленную на упругом подвесе на корпусе датчика.
При воздействии ускорения на датчик чувствительный элемент смещается за счет инерции.
в соответствии с законом Фарадея, магнит,
двигающийся в катушке индуктивности,
приводит к возникновению в ней напряжения.
Это напряжение пропорционально скорости
движения магнита и силе поля.
Схема пружинного акселерометра
При отсутствии ускорений натяжение пружин одинаково и масса располагается в среднем (нейтральном) положении. Если объект движется с постоянным линейным ускорением х, то масса перемещается на некоторую величину, при которой инерционная сила Рин, возникающая вследствие ускоренного движения массы в абсолютном пространстве, уравновешивается силой Рупр упругости пружин.
Для успокоения колебаний инерционной
массы в переходном режиме служит демпфер
4, создающий силу, пропорциональную
скорости перемещения массы относительно
корпуса 3. Применяют магнитоиндукционные,
жидкостные или воздушные демпферы.
Применяют магнитоиндукционные,
жидкостные или воздушные демпферы.
Интегрирующие акселерометры отличаются тем, что противодействующая сила является не позиционной, а скоростной. Интегрирующие акселерометры могут быть прямого измерения, в которых противодействующая сила создается демпфером со стабильным коэффициентом демпфирования, и компенсационные, в которых для создания противодействующей силы применяется скоростная обратная связь.
Схема однокомпонентного акселерометра
1 – инерционная масса; 2 – корпус; 3 – жидкость; 4 – направляющий стержень; 5 – усилитель; 6 – индуктивный датчик перемещения; 7 – электромагнитный привод
На схеме рис. 4 сейсмическая масса 1
подвешена на направляющей 4. Для уменьшения
трения о направляющую масса 1, помещенная
в жидкость 3, имеет нейтральную плавучесть,
что исключает сильное прижатие к
направляющей. Сигналы в рассматриваемой
схеме, пропорциональные перемещению
сейсмической массы, измеряются индуктивным
датчиком 6. После усиления в усилителе
5 сигнал поступает на электромагнитный
(силовой) привод 7. Выходным сигналом
акселерометра является падение напряжения
и на сопротивлении R, включенном
последовательно в цепь обмотки силового
привода. Демпфирование в приборе
получается за счет сопротивления при
движении сейсмической массы в жидкости.В
акселерометрах рассматриваемого типа
можно получить высокую собственную
частоту и малую зону нечувствительности.
Последнее достигается уменьшением сил
трения за счет взвешивания инерционной
массы в жидкости.
После усиления в усилителе
5 сигнал поступает на электромагнитный
(силовой) привод 7. Выходным сигналом
акселерометра является падение напряжения
и на сопротивлении R, включенном
последовательно в цепь обмотки силового
привода. Демпфирование в приборе
получается за счет сопротивления при
движении сейсмической массы в жидкости.В
акселерометрах рассматриваемого типа
можно получить высокую собственную
частоту и малую зону нечувствительности.
Последнее достигается уменьшением сил
трения за счет взвешивания инерционной
массы в жидкости.
LIS2DW12 — высокопроизводительный 3-осевой датчик линейного ускорения со сверхнизкой мощностью потребления
Автор: admin
6 Май
Устройство принадлежит к семейству «фемто» продуктов, при производстве которых используются надежные и отработанные технологические процессы, уже применяемые в изготовлении микроэлектромеханических измерителей ускорения.
Датчик LIS2DW12 предлагает пользователю несколько выбираемых шкал измерения ускорения — ±2g/±4g/±8g/±16g и способен формировать выходные цифровые данные с частотой от 1.6 Гц до 1600 Гц. Также прибор содержит 32-уровневый буфер типа FIFO, позволяющий временно сохранять данные для уменьшения количества обращений к хост-процессору.
Встроенная функция самодиагностики обеспечивает возможность тестирования прибора непосредственно в целевом приложении. LIS2DW12 имеет специализированное вычислительное ядро для обработки данных при детектировании движения и ускорения, в том числе свободного падения, пробуждения, конфигурируемого распознавания одно- и двукратного нажатия на сенсорный элемент, активации/деактивации, определения вертикальной и горизонтальной ориентации, а также 6D/4D-ориентации.
Акселерометр LIS2DW12 выпускается в компактном низкопрофильном корпусе LGA и рассчитан на эксплуатацию в расширенном диапазоне температур от -40°C до +85°C.
| Внутренняя архитектура LIS2DW12 |
Отличительные особенности:
- Сверхмалый ток потребления: 50 нА в выключенном состоянии и менее 1 мкА в режиме пониженного энергопотребления
- Чрезвычайно низкая погрешность измерения ускорения: менее 0,0013 g (скз.

- Несколько рабочих режимов с различными диапазонами измерения ускорения
- Диапазон напряжения питания: от 1.62 В до 3.6 В
- Независимый источник питания линий ввода/вывода
- Диапазон значений полной шкалы измерения ускорения: ±2g/±4g/±8g/±16g
- Высокоскоростной выходной интерфейс: I2C/SPI
- Одноцикловое преобразование данных по запросу
- 16-битный формат представления выходных данных
- Встроенный датчик температуры
- Функция самодиагностики
- 32-уровневый буфер типа FIFO
- Максимально допустимая ударная нагрузка: 10 000 g
- Диапазон рабочих температур: от -40°C до +85°C
- 12-выводной корпус LGA размером 2 мм х 2 мм х 0.7 мм
Область применения:
- Детекторы движения в портативных устройствах
- Распознавание жестов и игровые приставки
- Реализация функций, активируемых движением, и пользовательские интерфейсы
- Функция ориентации дисплеев
- Распознавание одно- и двукратного нажатия на сенсорный элемент
- Обнаружение свободного падения
- Схемы интеллектуального управления питанием для портативных устройств
Запросить образцы, средства разработки или техническую поддержку
Документация на LIS2DW12 (англ. )
)
Лаборатория автомобильной электроники Клемсона: Датчики ускорения
Датчики ускорения
|


 Дифференциальный конденсатор образует емкостной полумост, управляемый высокочастотным генератором прямоугольных импульсов. При приложении ускорения перпендикулярно сейсмической массе дифференциальный конденсатор рассогласован и на центральной пластине появляется ненулевое напряжение. Этот сигнал предварительно усиливается, демодулируется, усиливается и выводится как напряжение, пропорциональное приложенному ускорению.
Дифференциальный конденсатор образует емкостной полумост, управляемый высокочастотным генератором прямоугольных импульсов. При приложении ускорения перпендикулярно сейсмической массе дифференциальный конденсатор рассогласован и на центральной пластине появляется ненулевое напряжение. Этот сигнал предварительно усиливается, демодулируется, усиливается и выводится как напряжение, пропорциональное приложенному ускорению.

android — В чем разница между датчиками TYPE_ACCELEROMETER и TYPE_LINEAR_ACCELERATION?
спросил
Изменено 4 года, 6 месяцев назад
Просмотрено 6к раз
Думаю, TYPE_ACCELEROMETER показывает ускорение устройств. Однако я не могу понять, когда мне следует использовать TYPE_LINEAR_ACCELERATION ?
Мне нужно рассчитать скорость перемещения устройства.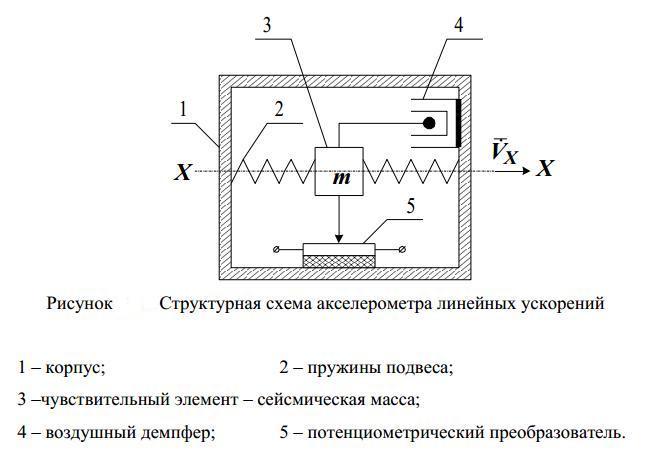 Какой датчик подходит для этого приложения?
Какой датчик подходит для этого приложения?
Кроме того, я читал, что TYPE_LINEAR_ACCELERATION использует акселерометр и ориентацию, чтобы узнать, куда направлена сила тяжести, а затем субмарины.
Как это возможно? Как Android узнает об ориентации устройства и вычитает ее?
- android
- android-sensors
Согласно http://developer.android.com/reference/android/hardware/SensorEvent.html#values TYPE_LINEAR_ACCELERATION совпадает с TYPE_9ACCELE0113 минус сила тяжести: ускорение = сила тяжести + линейное ускорение . Таким образом, с TYPE_LINEAR_ACCELERATION вы не можете определить ориентацию устройства, потому что оно не предоставляет данные о гравитации.
Ускорение является второй производной от объекта местоположение , скорость ( скорость ) является первой производной. Это означает, что вы можете вычислить относительное изменение скорости от ускорения, но вы не можете узнать из него, к каким именно значениям скорости относится это изменение, в общем случае.