Типы автомобильных двигателей
Двигатель – это сердце автомобиля, он является движущей силой машины. Он служит для преобразования энергии топлива в механическую энергию, которая используется для выполнения полезной работы.
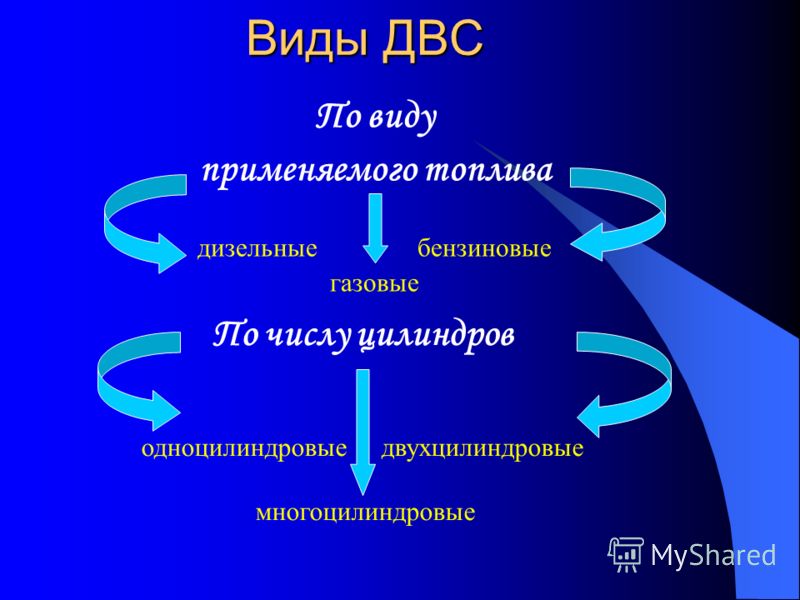
Классификация двигателей по типу
Принцип работы силового агрегата основывается на преобразования тепловой энергии в механическую. Повторяющиеся процессы в моторе являют собой рабочий цикл двигателя. Зависимо от того, сколько поршень делает ходов, двигатели делятся на четырехтактные и двухтактные. Двигатели внутреннего сгорания, которые применяются в машинах, работают по 4-тактному циклу. Сюда входит впуск топлива, рабочий ход (туда-назад) и выпуск отработанных газов.
В двухтактном моторе за один цикл происходит всего 2 хода поршня: рабочий ход и сжатие. Наполнение цилиндров и очистка происходит во время этих 2-х тактов. У двигателей этого типа есть существенные недостатки, например высокий уровень выброса выхлопных газов. Главный минус – это высокий расход топлива, из-за чего двухтактные двигатели не используются в современных автомобилях.
Инжекторный тип двигателя
Ижекторный двигатель работает немного иначе: топливо подается в воздушную среду способом мелкого впрыска. Под давлением через форсунку распыляется горючая жидкость, что значительно снижает расход топлива, потому как количество дозируют специальные устройства. По этой причине инжекторные двигатели более экономичные, а оптимальная пропорция горючей смеси позволяет увеличить чистоту выхлопа и повысить КПД силового агрегата.
Инжекторные двигатели делятся на механические и электронные. В механическом двигателе устанавливается дозировка топлива с помощью рычагов, а в электронном силовом агрегате применяется специальная система управления дозировкой топлива. При использовании таких систем более тщательно перегорает топливо и снижаются вредные выбросы.
Тип двигателя карбюраторный
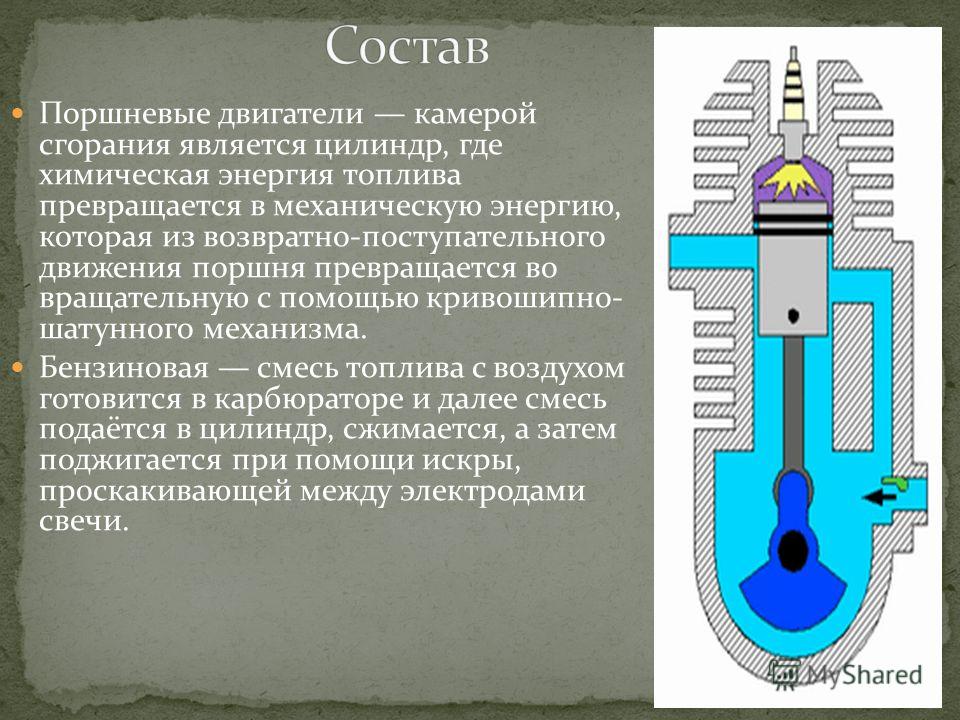
Бензин, который проходит через топливную систему, попадает в карбюратор или впускной коллектор. В него же поступает воздух, который в дальнейшем смешивается с топливом и получается готовая смесь. Она подается в цилиндры и там поджигается искрой, которую дают свечи зажигания.
Она подается в цилиндры и там поджигается искрой, которую дают свечи зажигания.
Автомобили с карбюраторным типом двигателем на данный момент считаются устаревшими. Сейчас широко используются двигатели инжекторного типа. Распыление топлива производится форсунками или через впускной коллектор.
Дизельный тип двигателя
Отдельного внимания достойны дизельные двигатели. Их принцип работы основывается на воспламенении рабочей смеси при сжатии. Когда втягивается воздух, процесс происходит под высоким давлением, в результате чего смесь самовоспламеняется. После воспламенения происходит рабочий ход поршня, который потом вытесняет отработавшие газы.
Данный тип двигателя имеет более низкий расход топлива и небольшое количество вредных веществ в выбросах. КПД этого силового агрегата тоже намного выше. Дизельные двигатели сейчас продолжают совершенствоваться и даже заморозки уже не помеха к запуску мотора.
Разные виды двигателей, работающих на дизельном топливе, отличаются характеристиками, которые зависят от времени года. Эти силовые агрегаты не имеют системы зажигания, потому как топливо загорается из-за высокого давления, что дает движение поршня.
Эти силовые агрегаты не имеют системы зажигания, потому как топливо загорается из-за высокого давления, что дает движение поршня.
Видео типы двигателей
В нижнеклапанном двигателе (в США известном как L-head или Flathead) клапаны расположены в блоке, по бокам цилиндров в один ряд, тарелками вверх. Распредвал тоже находится в блоке под клапанами, на одном уровне с коленчатым валом. Такая конструкция наиболее простая в изготовлении и обслуживании; двигатель достаточно надёжный, работает тихо и имеет легко съёмную головку блока. В то же время нижнеклапанный мотор из-за длинных подходов для топливной смеси и сложной формы камеры сгорания является низкооборотным и не может иметь высокой степени сжатия (следовательно, бывает только бензиновым). Это существенно снижает его мощность и экономичность в сравнении с верхнеклапанными силовыми агрегатами. Нижнеклапанные ДВС устанавливались на большинство довоенных автомобилей (кроме спортивных), а в 50-е гг. полностью исчезли в связи с появлением топлива с высоким октановым числом. Нижнеклапанные ДВС устанавливались на большинство довоенных автомобилей (кроме спортивных), а в 50-е гг. полностью исчезли в связи с появлением топлива с высоким октановым числом.
Разновидностью нижнеклапанного типа ГРМ является схема T-head, когда впускные клапаны расположены с одной стороны блока цилиндров, а выпускные — с другой, при этом распределительных вала два. Также существовали двигатели со смешанным расположением клапанов (F-head), с верхними впускными, боковыми выпускными клапанами и одним распредвалом в блоке. |
В верхнеклапанном двигателе типа OHV клапаны находятся в головке блока цилиндров, а распредвал — в самом блоке; привод клапанов осуществляется штангами-толкателями и коромыслами. Как правило, эта схема применяется только с двумя клапанами на цилиндр. В рядных двигателях распредвал установлен сбоку, в V-образных — в зазоре между блоками цилиндров. Преимущества такого ГРМ — в простоте конструкции, долговечности и компактных размерах, недостатки — в низких оборотах, крутящем моменте и мощности двигателя. Традиционно моторы OHV были распространены в США, где недостаток удельной мощности обычно компенсировался большим рабочим объёмом двигателя. В наше время механизм OHV уже практически не используется на легковых автомобилях. Традиционно моторы OHV были распространены в США, где недостаток удельной мощности обычно компенсировался большим рабочим объёмом двигателя. В наше время механизм OHV уже практически не используется на легковых автомобилях. |
В двигателях типа OHC (Overhead Camshaft) клапаны и распределительный вал расположены в головке блока цилиндров. В качестве привода клапанов используются цилиндрические толкатели, рычаги (рокеры) или коромысла. Из-за удалённости распредвала от коленчатого вала его привод (ременной или цепной) имеет ограниченный ресурс. Схема SOHC предполагает один верхний распределительный вал, который управляет как впускными, так и выпускными клапанами. Применяется на моторах с двумя клапанами на цилиндр. Если двигатель имеет V-образную или оппозитную конфигурацию, он комплектуется двумя распредвалами (по одному на каждый блок). | Разновидность верхнеклапанной системы OHC с двумя распределительными валами в головке блока цилиндров. Самая сложная и высокотехнологичная схема, обеспечивающая максимальную производительность. Существует несколько вариантов двигателей DOHC: с двумя клапанами на цилиндр, когда один распредвал действует на впускные клапаны, второй — на выпускные; или с тремя, четырьмя, пятью или шестью клапанами на цилиндр, когда каждый распредвал приводит в движение свой ряд клапанов. В V-образных и оппозитных двигателях система DOHC означает наличие четырёх распредвалов (по два на каждый блок), в W-образных — шести или восьми распредвалов. Сегодня большинство легковых автомобилей оснащаются двигателями DOHC с четырьмя клапанами на цилиндр. Существует несколько вариантов двигателей DOHC: с двумя клапанами на цилиндр, когда один распредвал действует на впускные клапаны, второй — на выпускные; или с тремя, четырьмя, пятью или шестью клапанами на цилиндр, когда каждый распредвал приводит в движение свой ряд клапанов. В V-образных и оппозитных двигателях система DOHC означает наличие четырёх распредвалов (по два на каждый блок), в W-образных — шести или восьми распредвалов. Сегодня большинство легковых автомобилей оснащаются двигателями DOHC с четырьмя клапанами на цилиндр. |
Типы поршневых двигателей внутреннего сгорания: виды
Автопроизводители с каждым годом разрабатывают все больше новых моторов. Они отличаются по размерам, объему и мощности.
Линейки моторов, устанавливающихся на конкретный автомобиль, пестрят ассортиментом. На одну модель производитель может предлагать до 15 вариантов двигателей.
Вкратце о принципе работы самого распространенного четырехтактного поршневого двигателя внутреннего сгорания. В таком двигателе цикл делится на 4 такта (4 хода поршня):
- Поршень идет вниз от верхней мертвой точки, освобождая камеру сгорания (цилиндр) и засасывая смесь из открытого впускного клапана.
- Поршень движется к верхней мертвой точке, сдавливая смесь. Когда поршень приближается к ней, в камеру сгорания подается искра.
- Свободный ход поршня. После подачи искры смесь детонирует и выдавливает поршень из камеры сгорания.
- Когда поршень совершает свой четвертый ход, открывается выпускной клапан, через который поршень выдавливает отработанные газы из камеры сгорания.
4 такта работы одного цилиндра ДВС
Рядный двигатель
Ход поршней в рядном ДВС (R6 — 6 цилиндров)
Один из самых простых типов двигателя. Он обозначается буквой «R» (R3, R4, R5 и так далее). В таком моторе цилиндры расположены в ряд. Их может быть от двух до шести. Самый распространенный из рядных двигателей — 4-х цилиндровый. Но в истории есть автомобили и с рядными 8-ми цилиндровыми моторами. Их перестали устанавливать из-за большой длины. Рядные «четверки» устанавливаются почти на все машины, объем которых находится в диапазоне от 1 до 2,4 литра. «Пятерки» начали устанавливать еще в 1974 году на Mercedes-Benz W123. Позже они начали появляться на Audi, а в конце 80-х — на автомобилях Volvo и Fiat. Касаемо рядной шестерки, самым ярким носителем данного мотора является Volvo S80, с объемом 3,2 литра.
V-образный двигатель
Ход поршней в V-образном двигателе (V8 — 8 цилиндров)
Следующий по популярности после рядного мотора. В таком двигатели цилиндры расположены друг напротив друга под углом от 10° до 120° (наиболее часто 45°, 60° и 90°) в форме латинской буквы «V», с равным количеством «котлов» на обоих сторонах. В таких моторах поршни вращают один общий коленчатый вал. На шильдике буква «V» обозначает тип двигателя, а следующие за ней цифры — количество цилиндров. Такие моторы бывают V6, V8, V10, V12. (не путать с 16V или 20V, в случае когда буква «V» расположена после цифр, она обозначает количество клапанов «Valve»). Почти всегда это машины с объемом двигателя более 3-х литров. Но бывают и меньше, например 2,8 v6 или 2,6 v6.
В таком двигатели цилиндры расположены друг напротив друга под углом от 10° до 120° (наиболее часто 45°, 60° и 90°) в форме латинской буквы «V», с равным количеством «котлов» на обоих сторонах. В таких моторах поршни вращают один общий коленчатый вал. На шильдике буква «V» обозначает тип двигателя, а следующие за ней цифры — количество цилиндров. Такие моторы бывают V6, V8, V10, V12. (не путать с 16V или 20V, в случае когда буква «V» расположена после цифр, она обозначает количество клапанов «Valve»). Почти всегда это машины с объемом двигателя более 3-х литров. Но бывают и меньше, например 2,8 v6 или 2,6 v6.
VR-образный двигатель
Так располагаются поршни в VR-образном двигателе
Знаменитый двигатель VR6 от Volkswagen, «V-образно-рядный» мотор (об этом и говорит обозначение VR). На таких двигателях применяется очень маленький развал блока, всего в 15°. Угол настолько мал, что такой мотор называют еще «смещённо-рядным». Самыми известными авто с таким мотором являются Golf VR6 и Passat VR6.
W-образный двигатель.
Ход поршней в W-образном двигателе (W16 — 16 цилиндров)
Этот мотор также разрабатывался компанией Volkswagen. Суть двигателя заключается в слиянии двух VR-образных моторов в один под углом 72°. Мотор W12 был презентован на концепт каре W12 Roadster. Он состоял из двух моторов VR6. Позже Volkswagen презентовал топовую версию Passat B5 с двигателем W8. Он компоновался из тех же двух VR6 моторов, только с «обрезанными» двумя цилиндрами с каждого. Самый известный W-образный мотор установлен на Bugatti Veyron. Его объем достигает 16,4 литра, а сделан он из двух моторов VR8.
Оппозитный двигатель
Ход поршней в оппозитном двигателе
Двигатель внутреннего сгорания, в котором угол между цилиндрами составляет 180°. Отличается от V-образного с развалом в 180° тем, что стоящие напротив поршни достигают верхней мертвой точки одновременно, а не поочередно. Оппозитный мотор очень активно устанавливается в автомобили марки Subaru.
Рекомендуем посмотреть наш репортаж с чемпионата по дрифту. Он прошел в Киеве на автодроме «Чайка».
Он прошел в Киеве на автодроме «Чайка».
Какие типы двигателей бывают — МОЙ МОТОЦИКЛ
При выборе мотоцикла покупатель чаще всего смотрит на единственный параметр — максимальную мощность. То есть сколько «лошадей» в нем. А на остальное особо внимания не обращает, конечно если это не особо опытный по этой части человек. И зачастую рождаются мифы о том, что мотор имеющий менее 100 л.с. «не едет» и прочая туфта.
Прежде чем сделать покупку, рекомендуем более внимательно изучить то, что ты хочешь и определиться конкретно для каких целей нужен мотоцикл и где на нем будешь ездить.
Итак поговорим о типах двигателей для мотоциклов:
На мототехнику в основном ставят бензиновые двигатели, хотя сейчас все чаще выпускают байки с електродвигателями — прогресс есть прогресс. Бывают еще и с дизельными движками, но их очень мало, эксклюзив.
Бывают еще и с дизельными движками, но их очень мало, эксклюзив.
«Несмотря на примитивность конструкции, 1-цилиндровый 4-тактный мотор воздушного охлаждения не сдает позиций на фоне более мощных и более продвинутых конкурентов. Причина – дешевизна в разработке и производстве. Недаром большинство китайских мотоциклов оснащают именнно такими агрегатами»
Бензиновые двигатели внутреннего сгорания бывают 2-тактными и 4-тактными. Двухтактники до сих пор используются в производстве малокубатурной техники. Благодаря простоте конструкции и отличному соотношению вес/мощность они заслуженно пользуются любовью в кругах скутеристов, любителей оффроуда и шоссейно-кольцевых гонок. Гражданские 2-тактные мотоциклы практически не выпускаются, за исключением некоторых 50- и 125-кубовых моделей. В целом, это неплохой выбор как для первого мотоцикла. Так как на них легче обучаться и привыкать к езде чем с кубатурой побольше, это для тех, у кого опыта, или нет или мало.
4-тактные двигатели технически более современны, у них сложнее конструкция, меньше вредных выбросов и ниже уровень потребления топлива. Их проще обслуживать, чем двухтактники. Современному 4-тактному мотору достаточно регулярной замены масла – и он будет безотказно служить тебе многие тысячи километров. Такими ДВС оснащаются 99% современных мотоциклов.
В отличие от автомобильного мира, в мотопроме существует намного большее количество вариантов компоновки моторов. Большинство авто оснащают 3- или 4-цилиндровым рядником, реже – 4-цилиндровым оппозитом. Все остальные вариации находятся за гранью финансовых возможностей большинства автолюбителей. С мотоциклами все интереснее. В диапазоне $10-20 тыс. доступны байки с самыми разными движками. Но как же выбрать и что будет полезнее?
Мощность или крутящий
«Для мотоцикла крайне важно наличие тахометра, чтобы райдер мог контролировать оптимальные обороты двигателя, где мощность и крутящий достигают максимальных значений»
Мы не будем рассматривать каждый движок до мелочей. Просто посмотрим, чем примечателен тот или иной механизм, какие у него есть достоинства и недостатки.
Просто посмотрим, чем примечателен тот или иной механизм, какие у него есть достоинства и недостатки.
Крутящий – это произведение силы на длину плеча ее действия (измеряется в ньютон-метрах). Мощность – это произведение момента на его угловую скорость, то есть количество работы, произведенное на определенных оборотах (измеряется в лошадиных силах). Крутящий момент, создаваемый движком, зависит от площади поршня, радиуса кривошипа коленвала, давления внутри цилиндра и других параметров. Мощность – прежде всего от оборотов движка.
Чтобы получить одновременно мощный и моментный двигатель, нужно заставить большие поршни двигаться очень быстро, вращая длинные рычаги коленвала. К сожалению, это вещи взаимоисключающие. Намного проще раскрутить до бешеных оборотов маленькие поршни с коротким рабочим ходом.
Что важнее: высокая мощность или классный крутящий? Важны не их пиковые значения, которые указывает производитель в ТТХ мотоцикла, а распределение «лошадей» и ньютон-метров в рабочем диапазоне.
«Два диаметрально противоположных примера распределения мощности и крутящего. На первом графике изображены кривые 1584-кубовой воздушной вэшки Harley-Davidson, на втором – 4-цилиндрового жидкостного рядника Honda CBR1000RR. Большая вэшка Харли крайне неохотно крутится, достигая скромных 65 л.с. при 5000 об/мин. Зато у этого мотора очень много крутящего – целых 113 Нм! Правда, все ньютон-метры доступны в узком рабочем диапазоне, оптимальный режим работы движка – 2000-4000 об/мин. Рядник Хонды напротив очень любит, чтобы его крутили. На низких оборотах крутящего мало, мощности – еще меньше. Обе кривые растут в диапазоне от 2500 до 10000 об/мин, самый «сок» движка – отрезок от 7000 до 12000, когда он выдает максимум и «лошадей», и ньютон-метров. В любом случае, оптимальный рабочий режим мотора Хонды намного шире, чем у Харли»
Типы двигателей:
Моноцилиндр.
Самый простой и самый популярный вариант устройства мотоциклетного движка. Чаще всего его можно увидеть на различных эндуро, мотардах и кроссачах. Преимущества одноцилиндрового мотора: компактность, простота конструкции и обслуживания, хороший крутящий момент на низких и средних оборотах. Недостатки: ограничение по объему цилиндра, вибрации, ограниченный рабочий диапазон.
Чаще всего его можно увидеть на различных эндуро, мотардах и кроссачах. Преимущества одноцилиндрового мотора: компактность, простота конструкции и обслуживания, хороший крутящий момент на низких и средних оборотах. Недостатки: ограничение по объему цилиндра, вибрации, ограниченный рабочий диапазон.
Параллельный твин.
Двигатель с двумя цилиндрами, установленными в ряд, можно встретить на круизерах, шоссейниках и кроссоверах. Преимущества: относительная простота обслуживания, эффективное охлаждение, хороший крутящий момент на средних оборотах. Недостатки: ограниченный рабочий диапазон, невысокая максимальная мощность.
V-твин.
«Воздушными» вэшками такого формата оснащают все Харли и прочие круизеры. Почему? Во-первых, такой движок красив. Также V-твины, правда, жидкостные, традиционно любят итальянские мотопроизводители, которые научились выжимать из них нешуточные ТТХ. Поэтому следует разделять «воздушники» и «водянки», которые очень сильно отличаются. Преимущества первых: отличный крутящий на низких оборотах, эстетичный внешний вид, простота конструкции. Недостатки: узкий рабочий диапазон, вибрации, недостаточное охлаждение заднего цилиндра. Жидкостные вэшки имеют такие плюсы: широкий рабочий диапазон, высокие мощность и крутящий, узость конструкции. Их минусы: сложность и часто дороговизна обслуживания.
Преимущества первых: отличный крутящий на низких оборотах, эстетичный внешний вид, простота конструкции. Недостатки: узкий рабочий диапазон, вибрации, недостаточное охлаждение заднего цилиндра. Жидкостные вэшки имеют такие плюсы: широкий рабочий диапазон, высокие мощность и крутящий, узость конструкции. Их минусы: сложность и часто дороговизна обслуживания.
V4.
Достаточно редкий и высокотехнологичный мотор, который очень любят в гонках MotoGP. Впрочем, используется не только на спортбайках, но и туристах. Преимущества: компактность, высокие мощность и крутящий, равномерная отдача ньютон-метров. Недостатки: навороченность конструкции, сложное ТО, высокая стоимость самого агрегата.
3-цилиндровый рядник.
Этот движок – экзотика в наших краях. Его используют Triumph, Benelli и MV Agusta (с недавних пор и Yamaha), комплектуя им свои стриты, спортбайки и туристы. Трехцилиндровый мотор – разумный компромисс между не очень мощным параллельным твином и мощным, но сложным 4-цилиндровым рядником. Преимущества: относительная компактность, небольшие вибрации, хорошие мощность и крутящий. Недостатки: отсутствие сервиса в Украине.
Преимущества: относительная компактность, небольшие вибрации, хорошие мощность и крутящий. Недостатки: отсутствие сервиса в Украине.
4-цилиндровый рядник.
Этот мотор устанавливают на быстрые байки. Главная особенность рядника – любовь к высоким оборотам. Такой двигатель можно и нужно крутить, только тогда он покажет все, на что способен. Преимущества: высокая мощность, минимум вибраций, эластичность, широкий выбор кубатуры – от 400 до 1450 см3. Недостатки: широта конструкции, сложное ТО, мало крутящего на низких оборотах.
Оппозит.
Эта компоновка и аббревиатура BMW – близнецы-братья. По сути, тот же V-твин, но с развернутыми на 180° цилиндрами. На самом деле немцы позаимствовали такую компоновку у англичан. В свою очередь, СССР украл ее у BMW, выпустив на просторы нашей бывшей необъятной родины популярные до сих пор «Днепры» и «Уралы». Преимущества оппозита: высокий крутящий момент, эффективное охлаждение цилиндров, низкий центр тяжести. Недостатки: ширина и сложность конструкции (в частности системы ГРМ).
Недостатки: ширина и сложность конструкции (в частности системы ГРМ).
Отдельно нужно сказать о единственном в своем роде 6-цилиндровом оппозите, который устанавливается на Honda Gold Wing. Этот 1832-кубовый мотор жидкостного охлаждения считается идеально сбалансированным (то есть в нем почти отсутствуют вибрации), у него низкий центр тяжести и отличный крутящий момент на низких и средних оборотах. Впрочем, такой рабочий объем делает движок почти автомобильным по своим характеристикам.
Виды и типы электродвигателей / Статьи и обзоры / Элек.ру
Электрический двигатель
Электродвигатель представляет собой электрическую машину, которая преобразовывает электроэнергию в энергию вращения вала с незначительными тепловыми потерями. Главный принцип работы любого электродвигателя заключается в использовании электромагнитной индукции в качестве основной движущей силы. Для этого конструкция электродвигателя включает:
- Неподвижную часть (статор или индуктор).
- Подвижную часть (ротор или якорь).
В зависимости от предназначения, применяемого рода тока и конструктивных особенностей электрические двигатели имеют большое количество разновидностей.
Двигатели постоянного тока
Электродвигатели постоянного тока объединяют широкий ассортимент устройств, обеспечивающих высокий КПД при трансформации электрической энергии в механическую. Для надежного соединения электрической цепи подвижной и неподвижной части электропривода постоянного тока используют щеточно-коллекторный узел. В зависимости от конструктивных особенностей щеточно-коллекторного узла, все электрические машины постоянного тока подразделяют на следующие группы:
- Коллекторные.
- Бесколлекторные.
В свою очередь коллекторные электродвигатели условно разделяют на следующие виды:
- Самовозбуждающиеся.
- С возбуждением от электромагнитов постоянного действия.
Устройства с независимым возбуждением характеризуются низкой мощностью, поэтому данные электроприводы используют для не ответственных операций с низкой нагрузкой. Машины с самовозбуждением подразделяют на:
Машины с самовозбуждением подразделяют на:
- Устройства с последовательным возбуждением, где якорь подключается последовательно обмотке возбуждения.
- Электродвигатели с параллельным возбуждением, где якорь включается параллельно обмотке возбуждения.
- Электропривод смешанного возбуждения, который характеризуется наличием параллельных и последовательных соединений.
Двигатели переменного тока
Электродвигатели переменного тока представлены широкой номенклатурой устройств, которые различают по многочисленным конструктивным и эксплуатационным характеристикам. В зависимости от скорости вращения ротора выделяют электрические машины синхронного и асинхронного типа.
Синхронные двигатели характеризуются одинаковой скоростью вращения ротора и магнитного поля питающего напряжения. Подобный тип электрических двигателей используют для изготовления устройств с высокой мощностью. Кроме этого существует еще одна разновидность синхронного привода — шаговые двигатели. Они имеют строго заданное в пространстве положение ротора, которое фиксируется подачей питания на обмотку статора. При этом переход из одного положения в другое осуществляется посредством подачи напряжения на требуемую обмотку.
Они имеют строго заданное в пространстве положение ротора, которое фиксируется подачей питания на обмотку статора. При этом переход из одного положения в другое осуществляется посредством подачи напряжения на требуемую обмотку.
Асинхронный электрический двигатель имеет частоту вращения ротора отличную от частоты вращения магнитного поля питающего напряжения. В настоящее время этот тип электродвигателей получил самое широкое распространение как на производстве, так и в быту.
В зависимости от количества фаз питающего напряжения электропривод принадлежит к одной из групп:
- 1-нофазные;
- 2-хфазные;
- 3-хфазные;
- многофазные.
Категория размещения и климатическое исполнение
Все электродвигатели производят с учетом воздействия во время эксплуатации определенных факторов окружающей среды. По этой причине все электрические машины подразделяют на следующие категории размещения:
- Для помещений с высоким уровнем влажности.

- Для помещений закрытого типа с вентиляцией естественного типа без искусственного регулирования климатических параметров. При этом ограничено воздействие пыли, влаги и УФ- излучения.
- В условиях открытого пространства.
- Для помещений закрытого типа с искусственным регулированием климатических параметров. При этом ограничено воздействие пыли, влаги и УФ-излучения.
- Для помещений с изменением влажности и температуры, которые не отличаются от изменений на улице.
В зависимости от климатического исполнения в соответствии с требованиями ГОСТ 15150 — 69 все электрические двигатели подразделяют на следующие типы исполнения:
- Все возможные макроклиматические районы (В).
- Холодный (ХЛ).
- Все морские районы (ОМ).
- Сухой тропический (ТС).
- Общий (О).
- Умеренный (У).
- Умеренный морской (М).
- Влажный тропический (ТВ).
Категория размещения и климатическое исполнение указывают в условном обозначении электродвигателя на его бирке и в паспорте.
Степень защиты корпуса
Для условного обозначения степени защиты корпуса электрической машины от воздействия вредных факторов окружающей среды используют аббревиатуру IP. При этом на корпусе электропривода указывают следующую информацию:
- Высокий уровень защиты от пыли — IP65, IP66.
- Защищенные — не ниже IP21, IP22.
- С защитой от влаги — IP55, IP5.
- С защитой от брызг и капель — IP23, IP24.
- Закрытое исполнение — IP44 — IP54.
- Герметичные — IP67, IP68.
При подборе электрического двигателя для эксплуатации в условиях воздействия определенных вредных факторов, необходимо тщательно подходить к выбору степени защиты его корпуса.
Общие требования безопасности при монтаже и эксплуатации
При монтаже электрического двигателя необходимо придерживаться следующих требований:
- Перед подключением проверить соответствие частоты и напряжения питающей сети с информацией на паспорте электрического двигателя.
- Перед установкой электрической машины обязательно проводят измерение сопротивления электрической изоляции обмотки статора относительно корпуса. При неудовлетворительных значениях проводят просушивание изоляции до достижения требуемого значения.
- При сопряжении валов необходимо точно соблюдать соосность с допустимым отклонением не более 0,2 мм.
- Для заземления корпуса электродвигателя используют только специальные заземляющие устройства, предусмотренные инструкцией завода производителя.
- Строго запрещен монтаж электропривода под напряжением.
В процессе эксплуатации электрических машин следует придерживаться следующих основных правил:
- Регулярный осмотр состояния электродвигателя является залогом своевременного определения неисправностей.
- Регулярно на протяжении всего срока эксплуатации проводят проверку исправности токовой и тепловой защиты, чистку и смазку, проверку контактных соединений и надежности заземления.
- При наличии повышенного шума или стука, проводят вибродиагностику с целью определения состояния подшипников и других вращающихся деталей.

- Следует исключить длительную работу однофазного электродвигателя в режиме холостого хода, что негативно влияет на срок его службы.
- Запрещается эксплуатация электрического двигателя с неисправной защитой от перегрева, перегрузки или завышенным значением сопротивления контура заземления.
Крановые электродвигатели
Крановые электродвигатели представляют собой асинхронные устройства переменного тока или двигатели постоянного тока с параллельным или последовательным возбуждением.
В отличие от других категорий электродвигателей, крановые электроприводы имеют следующие особенности:
- Большинство крановых электрических двигателей имеет закрытое исполнение корпуса.
- Момент инерции на роторе составляет минимально возможное значение, что обеспечивает минимальные потери энергии во время переходных процессов.
- Кратковременная перегрузка по моменту для крановых двигателей постоянного тока составляет 2,0 — 5,0, а для электромоторов переменного тока 2,3 — 3,5.

- Класс нагревостойкости изоляционных материалов не менее F.
- У кранового электропривода переменного тока в номинальном режиме ПВ составляет не менее 80 минут.
- С целью получения большой перегрузочной способности по моменту добиваются высоких значений магнитного потока.
- Отношение максимально допустимой частоты вращения к номинальному значению для электродвигателей постоянного тока составляет 3,5 — 4,9, а для машин переменного тока 2,5.
Эксплуатация кранового привода характеризуется следующими условиями эксплуатации:
- Частые пуски, реверсы и торможения.
- Регулирование частоты вращения в широком диапазоне значений.
- Повышенная вибрация и тряски.
- Повторно-кратковременный режим работы.
- Воздействие высокой температуры, газа, пыли и пара.
- Значительная перегрузка во время работы.
Общепромышленные электрические двигатели
Электродвигатели общепромышленного исполнения применяют для привода механизмов, которые не предъявляют особых требований к показателям КПД, энергосбережения, скольжению и пусковым характеристикам. Они характеризуются повторно-кратковременным режимом работы и изоляцией с классом нагревостойкости класса F. Наиболее популярными в этой категории являются асинхронные электрические двигатели марки АИР с короткозамкнутым ротором. Благодаря многочисленным достоинствам, этот тип электропривода с успехом применяется на всех производственных предприятиях. От продукции других торговых марок его отличает:
Они характеризуются повторно-кратковременным режимом работы и изоляцией с классом нагревостойкости класса F. Наиболее популярными в этой категории являются асинхронные электрические двигатели марки АИР с короткозамкнутым ротором. Благодаря многочисленным достоинствам, этот тип электропривода с успехом применяется на всех производственных предприятиях. От продукции других торговых марок его отличает:
- Простая конструкция с отсутствием подвижных контактов.
- Низкая стоимость в сравнении с электрическими машинами других типов.
- Высокая ремонтопригодность всех главных узлов и рабочих элементов.
- Использование напряжения сети 380 В без дополнительных регуляторов или фильтров.
- Монтаж двигателя осуществляется на лапах или фланцах, поэтому происходит в минимально короткий срок.
Электрические машины общепромышленного исполнения находят применение в сферах деятельности, где нет необходимости в высоких эксплуатационных параметрах: вентиляционные системы, насосные станции, станочное оборудование, компрессорные установки и др. Эксплуатация общепромышленных электродвигателей осуществляется в двух основных режимах: генераторный и двигательный. При этом в генераторном режиме электрические двигатели являются источником электроэнергии за счет преобразования механической энергии вращения вала. В двигательном режиме привод общепромышленного исполнения потребляет электроэнергию и превращает её в механическую энергию вращения вала.
Эксплуатация общепромышленных электродвигателей осуществляется в двух основных режимах: генераторный и двигательный. При этом в генераторном режиме электрические двигатели являются источником электроэнергии за счет преобразования механической энергии вращения вала. В двигательном режиме привод общепромышленного исполнения потребляет электроэнергию и превращает её в механическую энергию вращения вала.
Электрические двигатели с электромагнитным тормозом
Электрический привод с электромагнитным тормозом предназначен для эксплуатации в повторно-кратковременном или кратковременном режиме. Он разработан специально для механизмов, которые требуют форсированной остановки в строго регламентированное время. К таким механизмам относят: электрические тали, автоматизированные складские системы, обрабатывающие станки и др. Тормозной механизм, как правило, располагают со стороны противоположной валу двигателя. Он обеспечивает быстрое торможение электрического привода при отключении питания, а при повторной подаче напряжения растормаживает его.
Электрические машины со встроенным электромагнитным тормозом работают по следующему принципу:
- Электромагнитную катушку тормоза подключают последовательно к одной из фазных обмоток электродвигателя.
- Катушка получает постоянное напряжение посредством выпрямляющего устройства, которое располагают возле коробки с выводами или переменное напряжение непосредственно с обмотки электродвигателя.
- При отсутствии фазного напряжения катушка обесточивается, и якорь прочно зажимает блокировочный механизм.
- После восстановления электрического питания катушка подтягивает якорь, что позволяет валу двигателя свободно перемещаться.
В зависимости от способа монтажа электромоторы со встроенным электромагнитным тормозом изготавливают в следующих исполнениях:
- С горизонтальным валом.
- С вертикальным валом.
Благодаря своим преимуществам по времени остановки вала электродвигателя, этот тип электропривода обеспечивает надежную и безопасную эксплуатацию устройств с высокими требованиями к позиционированию или аварийной остановке.
Источник: Технический отдел ЗАО «КранЭлектроМаш»
Электромоторы и аккумуляторы | HowStuffWorks
Электромобили могут использовать двигатели переменного или постоянного тока:
- Если это двигатель постоянного тока , то он может работать от напряжения от 96 до 192 вольт. Многие двигатели постоянного тока, используемые в электромобилях, производятся в вилочных электропогрузчиках.
- Если это электродвигатель переменного тока , то, вероятно, это трехфазный электродвигатель переменного тока, работающий от напряжения переменного тока 240 В с аккумулятором на 300 В.
постоянного тока обычно проще и дешевле.Типичный двигатель будет иметь диапазон от 20 000 до 30 000 ватт. Типичный контроллер будет иметь диапазон от 40 000 до 60 000 ватт (например, 96-вольтный контроллер будет выдавать максимум 400 или 600 ампер). У двигателей постоянного тока есть хорошая особенность: вы можете на перегрузить их (с коэффициентом 10: 1) на короткие периоды времени. То есть двигатель мощностью 20000 Вт будет принимать 100000 Вт в течение короткого периода времени и обеспечивать мощность в 5 раз превышающую номинальную. Это отлично подходит для кратковременных ускорений.Единственное ограничение — это перегрев двигателя. Слишком сильная перегрузка — и двигатель нагревается до точки самоуничтожения.
То есть двигатель мощностью 20000 Вт будет принимать 100000 Вт в течение короткого периода времени и обеспечивать мощность в 5 раз превышающую номинальную. Это отлично подходит для кратковременных ускорений.Единственное ограничение — это перегрев двигателя. Слишком сильная перегрузка — и двигатель нагревается до точки самоуничтожения.
Объявление
Установкипеременного тока позволяют использовать практически любой промышленный трехфазный двигатель переменного тока, что может облегчить поиск двигателя определенного размера, формы или номинальной мощности. Двигатели и контроллеры переменного тока часто имеют функцию regen . Во время торможения двигатель превращается в генератор и возвращает энергию аккумуляторам.
В настоящее время слабым звеном любого электромобиля являются аккумуляторные батареи. Существуют как минимум шесть серьезных проблем с современной технологией свинцово-кислотных аккумуляторов:
- Они тяжелые (типичный свинцово-кислотный аккумуляторный блок весит 1000 фунтов и более).

- Они громоздкие (машина, которую мы здесь рассматриваем, имеет 50 свинцово-кислотных аккумуляторов, каждая размером примерно 6 x 8 дюймов на 6 дюймов).
- Они имеют ограниченную емкость (типичный свинцово-кислотный аккумуляторный блок может вмещать 12 до 15 киловатт-часов электроэнергии, что дает автомобилю запас хода всего 50 миль или около того).
- Они медленно заряжаются (типичное время перезарядки свинцово-кислотных аккумуляторов составляет от четырех до 10 часов для полной зарядки, в зависимости от технологии аккумуляторов и зарядного устройства).
- У них короткий срок службы (от трех до четырех лет, возможно, 200 полных циклов зарядки / разрядки).
- Они дорогие (возможно, 2000 долларов за аккумулятор, показанный в образце автомобиля).
В следующем разделе мы рассмотрим больше проблем с аккумуляторной технологией.
|
 Двигатели постоянного тока бывают самых разнообразных форм и размеров: железный сердечник с постоянным магнитом, ротор без железа с постоянным магнитом, бесщеточный с постоянным магнитом, соединение с последовательным полем, шунт с соединенным полем, соединение соединения с обмоткой, шаговый двигатель с переменным магнитным сопротивлением, шаговый двигатель с постоянным магнитом и гибридные шаговые двигатели.
Двигатели постоянного тока бывают самых разнообразных форм и размеров: железный сердечник с постоянным магнитом, ротор без железа с постоянным магнитом, бесщеточный с постоянным магнитом, соединение с последовательным полем, шунт с соединенным полем, соединение соединения с обмоткой, шаговый двигатель с переменным магнитным сопротивлением, шаговый двигатель с постоянным магнитом и гибридные шаговые двигатели.
 Эти электрические обмотки создают магнитное поле, когда они возбуждаются внешним током.Магнитные полюса, создаваемые этим полем ротора, притягиваются к противоположным полюсам, создаваемым полем статора, и отталкиваются аналогичными полюсами, что заставляет ротор вращаться.
Эти электрические обмотки создают магнитное поле, когда они возбуждаются внешним током.Магнитные полюса, создаваемые этим полем ротора, притягиваются к противоположным полюсам, создаваемым полем статора, и отталкиваются аналогичными полюсами, что заставляет ротор вращаться. Это магнитное поле противостоит постоянному магниту, установленному справа от катушки
Это магнитное поле противостоит постоянному магниту, установленному справа от катушки  Таким образом, полярность приложенного напряжения определяет направление двигателя, а амплитуда напряжения определяет скорость двигателя.
Таким образом, полярность приложенного напряжения определяет направление двигателя, а амплитуда напряжения определяет скорость двигателя.
Типы двигателей | Renesas
Мотор постоянного тока с щеткой
Поскольку этот тип двигателя приводится в действие источником постоянного тока, его также называют просто двигателем постоянного тока. Чтобы отличить его от синхронного двигателя с постоянными магнитами (бесщеточный двигатель постоянного тока), мы будем называть его щеточным двигателем постоянного тока. Так как щеточный двигатель постоянного тока сравнительно экономичен и прост в управлении, он используется в широком спектре применений.
Чтобы отличить его от синхронного двигателя с постоянными магнитами (бесщеточный двигатель постоянного тока), мы будем называть его щеточным двигателем постоянного тока. Так как щеточный двигатель постоянного тока сравнительно экономичен и прост в управлении, он используется в широком спектре применений.
Щеточный двигатель постоянного тока создает крутящий момент путем механического переключения направления тока в координации с вращением с помощью коммутатора и щеток. К недостаткам щеточного двигателя постоянного тока относится необходимость технического обслуживания из-за износа щеток и возникновения электрических и механических шумов. Коэффициент заполнения ШИМ можно регулировать с помощью микроконтроллера и т. Д. Для изменения приложенного напряжения, что позволяет контролировать скорость вращения и положение.
Приложения
- Игрушки
- Электроинструменты
- Автомобильные электронные компоненты
Синхронный двигатель с постоянным магнитом (бесщеточный двигатель постоянного тока)
Уберите коллектор и щетки, которые являются недостатками щеточного двигателя постоянного тока, и вы получите синхронный двигатель с постоянными магнитами (бесщеточный двигатель постоянного тока).
Из-за отсутствия щеток бесщеточный двигатель постоянного тока имеет длительный срок службы и низкий уровень шума. Кроме того, он может обеспечить высокую эффективность, поэтому он используется в широком спектре приложений, включая энергосберегающие бытовые приборы и длительные промышленные приложения.
Есть два основных типа конструкции, различающиеся тем, как магнит установлен на роторе.
- Поверхностный постоянный магнит (SPM): Этот тип имеет постоянный магнит, прикрепленный к внешней стороне ротора, и магнитная проницаемость постоянна во всех положениях.
- Внутренний постоянный магнит (IPM): этот тип имеет постоянный магнит, встроенный в ротор, и, поскольку магнитная проницаемость изменяется в зависимости от положения, можно использовать момент сопротивления.
Поскольку нет структуры для механического переключения направления тока, это необходимо выполнять электронным способом с использованием схемы инвертора. Путем управления схемой инвертора с помощью микроконтроллера и т.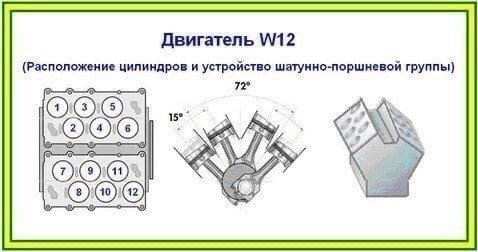 Д. К статору прикладывается трехфазное напряжение переменного тока, создавая вращающееся магнитное поле.
Д. К статору прикладывается трехфазное напряжение переменного тока, создавая вращающееся магнитное поле.
можно разделить на следующие два основных типа.
- Привод с трапецеидальной (прямоугольной) формой волны.
- Привод синусоидальной волны: управляет путем подачи напряжения синусоидальной формы для подавления вибрации, шума и пульсации крутящего момента, которые возникают при использовании привода с трапецеидальной волной. Во многих случаях векторное управление (управление, ориентированное на поля) используется для линейно независимого управления крутящим моментом и фазой.Поскольку крутящий момент пропорционален приводному току, высокоскоростное и высокоточное управление положением и скоростью возможно за счет добавления датчиков положения и скорости.
Для эффективного движения необходимо определить положение ротора (магнита). Датчики Холла, энкодеры и резольверы используются для определения положения. Из-за температурных ограничений датчиков и соображений стоимости бывают случаи, когда положение ротора (магнита) оценивается по трехфазному току или наведенному напряжению без использования датчиков (оценка положения без датчиков).
В целом, в промышленных системах в основном используется сенсорный метод, а в бытовых приборах — бессенсорный метод оценки положения.
Приложения
- Кондиционеры
- Стиральные машины
- Холодильники
- Электроинструменты
- Сервоприводы
- Роботы
- Компрессоры
- Жесткие диски (HDD)
- Автомобильные электронные компоненты
Трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель — это асинхронный двигатель, приводимый в действие трехфазным источником питания переменного тока.Вращающееся магнитное поле создается путем пропускания трехфазного переменного тока через статор, а индуцированный ток создается в роторе за счет электромагнитной индукции. Это вращающееся магнитное поле и индуцированный ток создают электромагнитную силу, которая заставляет ротор вращаться. Поскольку магнитное поле должно перемещаться относительно ротора, чтобы генерировать индуцированный ток, скорость вращения ротора всегда ниже, чем синхронная скорость вращающегося магнитного поля.Разница между частотой вращающегося магнитного поля и частотой, эквивалентной скорости вращения, называется частотой скольжения. Создаваемый крутящий момент пропорционален частоте скольжения.
Трехфазный асинхронный двигатель имеет простую и прочную конструкцию. Потому что его легко использовать для больших
Типы двигателей в Motion Control
Возможно, мы не производим двигатели на ADVANCED Motion Controls, но мы работаем с ними каждый день и создаем сервоприводы, чтобы они работали, так что вы можете сказать, что мы кое-что о них знаем.Мы очень гордимся тем, что можем обслуживать любое приложение, а это означает, что у нас есть привод практически для любого типа двигателя, который вы можете найти. Какие есть моторы и где они используются?
Серводвигатели
В целом, все серводвигатели относятся к двигателям с постоянными магнитами, у которых есть постоянные магниты либо в статоре (та часть, которая остается неподвижной), либо в роторе (часть, которая вращается в середине статора). Однако со временем границы того, что такое серводвигатель, а что нет, стали немного размытыми.Эта неоднозначность частично связана с расширением использования сервоприводов помимо сервоуправления.
Десятилетия назад сервоприводы лишь усиливали командный сигнал, отсюда и их альтернативное название — сервоусилители. По мере развития технологии управления движением инженеры обнаружили, что сервоусилители можно модифицировать и настраивать для управления другими типами двигателей так же, как они управляют серводвигателями. Сегодняшние сервоприводы гораздо более универсальны и могут быть легко сконфигурированы для самых разных типов двигателей, но при этом в их названии по-прежнему сохраняется слово «сервопривод».
Серводвигателииспользуются в миллионах приложений — от транспортных средств с дистанционным управлением до фрезерных станков с ЧПУ и хирургических роботов. Серводвигатели популярны по ряду причин, включая их энергоэффективность и небольшие размеры. Но самое главное, они могут предложить очень точное управление, когда у них есть устройство обратной связи и сервопривод. ADVANCED Приводы Motion Controls способны управлять практически любым серводвигателем, который вы можете найти.
Матовый DC (однофазный)
Щеточные двигатели постоянного тока, пожалуй, самый простой из имеющихся двигателей.У вас есть постоянные магниты, закрепленные в статоре, и витки проволоки в роторе. Когда электрический ток проходит через катушки, магнитное поле создает силу, которая заставляет ротор двигаться. Вопрос в том, как постоянно подавать постоянный ток на вращающийся объект, чтобы провода не запутались? Ответ — токопроводящие щетки и коммутатор.
Коммутатор представляет собой круглую деталь с металлическими контактными точками, подключенными к каждой петле катушки ротора. Электропроводящие щетки не похожи на щетки для волос; Обычно они представляют собой куски графитовой смеси, которые подпружинены для электрического контакта с коммутатором двигателя, когда он вращается для обеспечения электрического тока.Они предлагают отличные характеристики по экономичной цене. Однако одним из недостатков является физический контакт между щетками и коммутатором, создающий трение, которое изнашивает щетки и со временем создает множество частиц пыли. Из-за этого щеточные двигатели более подвержены затратам на техническое обслуживание в течение длительного периода времени, чем их бесщеточные аналоги, несмотря на более низкие начальные затраты. Для недорогих приложений, приложений с коротким сроком службы или приложений, где двигатель легко доступен для ремонта или замены, щеточный двигатель постоянного тока может помочь.
Управление серводвигателем— это наша игра, поэтому каждый сервопривод ADVANCED Motion Controls может работать с щеточным двигателем постоянного тока, конечно, при условии, что он находится в соответствующем диапазоне мощности.
Бесщеточный DC (трехфазный)
Бесщеточные двигатели используют противоположный подход, чем щеточные двигатели. Они помещают в ротор постоянные магниты и пропускают электричество через статор. Механического коммутатора больше нет. Вместо этого три фазы двигателя статора питаются постоянным током, и их катушки взаимодействуют с магнитным полем от магнитов ротора.Благодаря чередованию, какая из двух фаз двигателя активна одновременно, управляемым образом, магнитные поля заставляют ротор вращаться.
Бесщеточные двигателипостоянного тока обычно стоят дороже, чем их щеточные аналоги. Однако уменьшенный механический контакт (также известный как отсутствие щеток) в бесщеточных двигателях постоянного тока означает превосходное рассеивание тепла, меньшую потребность в техническом обслуживании и большую электрическую эффективность, что в конечном итоге может снизить затраты.
Для применений, в которых двигатель может быть труднодоступен для обслуживания или требуется более высокая эффективность, чем щеточный двигатель, трехфазный бесщеточный двигатель постоянного тока может быть подходящим вариантом.
Бесщеточные серводвигатели легко управляются с нашими продуктами. За некоторыми исключениями, все наши активно продаваемые сервоприводы могут работать с бесщеточными двигателями постоянного тока.
Бесщеточный AC
Бесщеточные серводвигатели переменного тока, также известные как синхронные двигатели с постоянными магнитами или PMAC, невероятно эффективны. Как и в бесщеточных двигателях постоянного тока, электрический ток проходит через статор, а постоянные магниты находятся в роторе.
В наши дни разница заключается не в самих двигателях при сравнении бесщеточных двигателей переменного тока с бесщеточными двигателями постоянного тока, а в том, как они управляются сервоприводом.В бесщеточном переменном токе ток постоянно проходит через три фазы, но чередуется взад и вперед по синусоиде, как если бы вы видели источник переменного тока из стены. Это явление создает чистое вращающееся магнитное поле, вращающееся гораздо более плавно, чем магнитное поле, получаемое путем включения и выключения фаз двигателя в бесщеточном двигателе постоянного тока.
Как и бесщеточные двигатели постоянного тока, они редко требуют обслуживания из-за отсутствия механических щеток. Недостатком бесщеточных двигателей переменного тока по сравнению с бесщеточными двигателями постоянного тока (и асинхронными двигателями переменного тока, которые будут обсуждены позже) является их еще большая начальная стоимость.Однако их эффективность и минимальные затраты на обслуживание могут компенсировать это в долгосрочной перспективе.
СервоприводыAMC DigiFlex Performance и FlexPro могут быть настроены для работы безщеточных двигателей переменного тока при наличии устройства обратной связи.
Другие вращательные двигатели
Шаговый
Шаговые двигатели похожи на бесщеточные двигатели, но движение определяется пошагово. Как это достигается? Ротор и статор имеют форму «зубьев», но, в отличие от шестерен, зубья не входят в зацепление — они используются для магнитной центровки.В статоре меньше зубцов, чем в роторе, поэтому не все зубья можно выровнять одновременно. При намагничивании различных фаз статора, например, северной или южной, ротор будет очень немного сдвигаться, чтобы выровнять или противодействовать активным фазам.
Даже с двумя или тремя фазами двигателя, шаговые двигатели могут двигаться с очень строго контролируемыми приращениями с каждым шагом, который может быть меньше одного градуса движения. При полушаге (чередование между использованием 1 и 2 согласованных фаз одновременно) и микрошагом (более постепенное включение и выключение фаз) разрешение можно увеличить вдвое за счет крутящего момента.Это делает шаговые двигатели идеальными для высокоточных приложений.
Вы видите управление шаговым двигателем в принтерах (2D и 3D), оптике, низкопроизводительных настольных станках с ЧПУ, компьютерных компонентах, объективах фотоаппаратов и других устройствах, которым требуется точное управление положением. ADVANCED Элементы управления движением Сервоприводы FlexPro и DigiFlexPerformance могут работать с шаговыми двигателями с обратной связью. Это означает, что двигателям необходима обратная связь от энкодера, чтобы сервоприводы могли управлять ими как серводвигателями.
Индукция переменного тока
Изобретенные Николой Тесла асинхронные двигатели, возможно, являются наиболее распространенным типом двигателей в мире.В отличие от других роторных двигателей, которые мы обсуждали, асинхронные двигатели переменного тока не используют постоянные магниты ни в статоре, ни в роторе.
Как и бесщеточные серводвигатели переменного тока, они используют трехфазную петлю переменного тока, которая создает чистое вращающееся магнитное поле. Однако вместо использования поля для перемещения постоянных магнитов в роторе магнитный поток индуцирует ток в роторе, который выполнен в виде беличьей клетки. Затем этот ток создает магнитное поле, которое взаимодействует с магнитным полем статора и заставляет ротор вращаться.В некотором смысле ротор постоянно пытается догнать вращающееся магнитное поле статора. Разница в скорости называется скольжением.
Скорость асинхронного двигателя переменного тока можно отрегулировать простым изменением частоты переменного тока. Кроме того, использование переменного тока в отличие от постоянного тока само по себе может сделать эти двигатели очень привлекательными для приложений с очень большой мощностью. В следствии. Асинхронные двигатели переменного тока обычно используются в больших устройствах, таких как краны, лифты, электромобили и другое тяжелое оборудование.Все цифровые сервоприводы ADVANCED Motion Controls могут работать с векторными двигателями с обратной связью, в основном с асинхронными двигателями переменного тока с обратной связью от энкодера.
Невращающиеся двигатели
Не все приложения для управления движением включают вращение чего-либо или сочленение суставов.
Линейные двигатели
Линейные двигатели можно рассматривать как «развернутые» бесщеточные двигатели постоянного тока, в которых статор и ротор меняются местами. Это длинная дорожка из постоянных магнитов, чередующихся по полярности, и движущаяся каретка с тремя фазами катушек.Направление тока через эти катушки намагничивает фазы на север или юг, которые соответственно тянут или толкают его по моторной дорожке.
Эти двигатели используются в приложениях, где требуется точное и высокоскоростное линейное движение, например, в промышленных 3D-принтерах или демонстрациях AMC по метанию мяча. Их можно ориентировать горизонтально, вертикально или под углом. Эти функции в буквальном смысле имеют свою цену; линейные двигатели намного дороже, чем другие типы двигателей.
Все ADVANCED Элементы управления движением Цифровые сервоприводы DigiFlex Performance и FlexPro могут работать с линейными двигателями.
Линейный привод
Линейные приводы являются альтернативой линейным двигателям. Технически это не совсем другой тип двигателя. Это роторный двигатель, такой как сервопривод, асинхронный или шаговый двигатель, соединенный с шарико-винтовым механизмом для создания линейного движения. Поскольку эта конструкция очень чувствительна к люфту, двойная обратная связь часто используется, когда требуется точность. В контурах используется одно устройство обратной связи на роторном двигателе и одно устройство на линейно-подвижном элементе.
Линейные приводы используются во многих устройствах, таких как большие торговые машины, настольные 3D-принтеры и большие портальные системы. Обычно они являются менее дорогостоящей альтернативой линейным двигателям постоянного тока, компромиссом являются более низкие максимальные скорости и большее пространство, необходимое для интеграции (из-за роторного двигателя). Однако система управления движением с линейным приводом может быть невероятно эффективной и создавать большие силы, чем системы с линейным двигателем.
Звуковые катушки
Звуковые катушки — это однофазные линейные двигатели с ограниченным ходом менее одного электрического цикла.Они полезны своей скоростью отклика, точностью и аккуратностью.
Звуковые катушки чаще всего встречаются в аудиоколонках. Возвратно-поступательное движение в сочетании с коротким диапазоном движения и точностью позволяет звуковым катушкам создавать вибрации, которые создают слышимый шум от электрических сигналов. В приложениях управления движением двигатели со звуковой катушкой используются для линейного движения на коротких расстояниях, например, в машинах для ускоренных испытаний на ресурс, где материалы могут подвергаться множеству циклов деформации контролируемым образом, в устройствах активного демпфирования, в которых груз может быстро перемещаться вперед и назад. противодействовать нежелательной вибрации или любому короткоходному позиционированию, где необходимы высокая скорость и точность.
Использование сервопривода для управления звуковой катушкой аналогично управлению щеточным серводвигателем постоянного тока, основное отличие состоит в том, что движение является линейным, а не вращательным. В случае управления серводвигателем ток пропорционален крутящему моменту, тогда как в управлении звуковой катушкой ток пропорционален силе. И поскольку все наши сервоприводы могут управлять щеточными двигателями, все они также могут управлять звуковыми катушками.
Последние мысли
Надеюсь, этот блог даст вам представление о различных типах двигателей и о том, как их можно использовать.