виды, устройство, принцип работы, применение
Датчик — это миниатюрное, сложное устройство, которое преобразует физические параметры в сигнал. Подает он сигнал в удобной форме. Основной характеристикой датчика является его чувствительность. Датчики положения осуществляют связь между механической и электронной частью оборудования. Пользуются им для автоматизации процессов. Используются эти устройства во многих отраслях производства.
Описание и назначение
Датчики положения могут быть разными по форме. Изготавливают их для определенных целей. С помощью прибора можно определить месторасположение объекта. Причем физическое состояние не имеет значение. Объект может иметь твердое тело, быть в жидком состоянии, либо даже сыпучим.
При помощи прибора можно решить разные задачи:
- Измеряют положение и перемещение (угловое и линейное) органов в рабочих машинах, механизмах. Измерение может совмещаться с передачей данных.
- В АСУ, робототехнике может быть звеном обратной связи.

- Контроль степени открытия/закрытия элементов.
- Регулировка направляющих шкивов.
- Электропривод.
- Определение данных расстояния до предметов без привязки к ним.
- Проверку функций механизмов в лабораториях, то есть провести испытания.
Классификация, устройство и принцип действия
Датчики положения бывают бесконтактные и контактные.
- Бесконтактные, это приборы являются индуктивными, магнитными, емкостными, ультразвуковыми и оптическими. Они при помощи магнитного, электромагнитного или электростатического поля образуют связь с объектом.
- Контактные. Самым распространенным из этой категории, является энкодер.
Бесконтактный
Бесконтактные датчики положения или сенсорный выключатель, срабатывают без контакта с подвижным объектом. Они способны быстро реагировать и часто включаться.
По прицепу действия бесконтактные бывают:
- емкостными,
- индуктивными,
- оптическими,
- лазерные,
- ультразвуковые,
- микроволновые,
- магниточувствительные.

Бесконтактные могут применяться для перехода на частоту вращения ниже, или остановки.
Индуктивные
Индуктивный датчик бесконтактный работает за счет изменений в электромагнитном поле.
Основные узлы индуктивного датчика изготовлены из латуни либо полиамида. Узлы связанны между собой. Конструкция надежна, способна выдерживать большие нагрузки.
- Генератор создает электромагнитное поле.
- Триггер Шмидта перерабатывает информацию, и передает другим узлам.
- Усилитель способен передавать сигнал на большие расстояния.
- Светодиодный индикатор помогает контролировать его работу и отслеживать изменение настроек.
- Компаунд — фильтр.
Работа индуктивного прибора начинается с момента включения генератора, создается электромагнитное поле. Поле влияет на вихревые токи, которые меняют амплитуду колебаний генератора. Но генератор первый реагирует на изменения. Когда в поле попадает двигающийся металлический предмет, сигнал подается на блок управления.
После поступления сигнала, происходит его обработка. Величина сигнала зависит от объема предмета, и от расстояния, разделяющего предмет и прибор. Затем происходит преобразование сигнала.
Емкостные
Емкостной датчик внешне может иметь обычный плоский или цилиндрический корпус, внутри которого штыревые электроды, и диэлектрическая прокладка. Одна из пластин стабильно отслеживает перемещение предмета в пространстве, в результате изменяется емкость. С помощью этих приборов измеряют угловое и линейное перемещение предметов, их размеры.
Емкостные изделия простоты, обладают высокой чувствительностью и малой инерционностью. Внешнее влияние электрических полей влияет на чувствительность прибора.
Оптические
Оптические датчики называют глазами авторизованного производства. В основном это фотодатчики, работающие в инфракрасной области. Они способны:
- Измерять положение, перемещение предметов, после концевых выключателей.
- Выполнять бесконтактное измерение.
- Выявить положение предметов двигающихся на большой скорости.
Барьерный
Барьерный оптический датчик обозначают латинской буквой «Т». Этот оптический прибор двухблочный. Используется для обнаружения предметов попавших в зону обзора между передатчиком и приемником. Зона действия до 100м.
Рефлекторный
Буквой «R» обозначается рефлекторный оптический датчик. Изделие рефлекторное вмещает в одном корпусе передатчик и приемник. Рефлектор служит отражением луча. Чтобы обнаружить предмет с зеркальной поверхностью в датчике устанавливают поляризационный фильтр. Дальность действия до 8м.
Диффузионный
Датчик диффузионный обозначается буквой «D». Корпус прибора моноблочный. Этим приборам не требуется точная фокусировка. Конструкция рассчитана на работу с предметами, находящиеся на близком расстоянии. Дальность действия 2 м.
Лазерные
Лазерные датчики обладают высокой точностью. Они могут определить место, где происходит движение и дать точные размеры объекта. Приборы эти небольших габаритов. Потреблении энергии приборами минимальное. Изделие моментально способно выявить чужого и сразу включить сигнализацию.
Приборы эти небольших габаритов. Потреблении энергии приборами минимальное. Изделие моментально способно выявить чужого и сразу включить сигнализацию.
Основа работы лазерного прибора — измерить расстояние до предмета с помощью треугольника. Излучается лазерный луч из приемника с высокой параллельностью, попадая на поверхность предмета, отражается. Отражение происходит под определенным углом. Величина угла зависит от расстояния, на котором находится предмет. Отраженный луч возвращается в приемник. Считывает информацию интегрированный микроконтроллер – он определяет параметры объекта и его расположение.
Ультразвуковые
Ультразвуковые датчики – это сенсорные приборы, которые используются для преобразования электрического тока в волны ультразвука. Их работа основана на взаимодействии колебаний ультразвука с контролируемым пространством.
Работают приборы по принципу радара — улавливают объект по отраженному сигналу. Звуковая скорость постоянная величина. Прибор способен вычислить расстояние до объекта в соответствии с диапазоном времени, когда вышел сигнал и вернулся.
Микроволновые
Микроволновые датчики движения излучают высокочастотные электромагнитные волны. Изделие чувствительно к изменению отражаемых волн, которые создаются объектами в контролируемой зоне. Объект же может быть теплокровным, живым, или просто предметом. Важно чтобы объект отражал радиоволны.
Используемый принцип радиолокации, позволяет обнаружить объект и вычислить скорость его перемещения. При движении срабатывает прибор. Это эффект Допплера.
Магниточувствительные
Этот вид приборов изготавливают двух видов:
- на основе механических контактов;
- на основе эффекта Холла.
Первый может работать при переменном и постоянном токе до 300V или при напряжении близком к 0.
Изделие на основе эффекта Холла чувствительным элементом отслеживает изменение характеристик при действии внешнего магнитного поля.
Контактный
Контактные датчики — это изделия параметрического типа. Если наблюдаются трансформации механической величины, у них изменяется электрическое сопротивление. В конструкции изделия два электрода, которые обеспечивают контакт входа приемника с грунтом. Емкостной преобразователь состоит из двух металлических пластин, держат они два оператора, установленных на удалении друг от друга. Одной пластиной может быть корпус приемника.
В конструкции изделия два электрода, которые обеспечивают контакт входа приемника с грунтом. Емкостной преобразователь состоит из двух металлических пластин, держат они два оператора, установленных на удалении друг от друга. Одной пластиной может быть корпус приемника.
Контактный угловой датчик называют энкодер, используется для определения угла поворота вращающегося предмета. Нейтральный отвечает за режимом работы двигателя.
Ртутный
Ртутные датчики положения имеют стеклянный корпус и по размерам схожи с неоновой лампой. Имеется два вывода-контакта с капелькой ртутного шарика внутри стеклянной вакуумной, запаянной колбы.
Используется автомобилистами для контроля угла наклона подвески, открытия капота, багажника. Используют его и радиолюбители.
Сферы применения
Области использования миниатюрных устройств обширны:
- Используют в машиностроении для сборки, тестирования, упаковки, сварки, заклепки.

- В лабораториях применяют для контроля, измерения.
- Автомобильной технике, в транспортной промышленности, подвижной технике. Наиболее популярен датчик нейтральной передачи для МКПП. Во многих системах управления автомобилей присутствуют датчики. Они есть в механизме рулевого управления, клапана, педали, в подкапотных системах, в системах управления зеркалами, креслами, откидными крышами.
- Применяют их в конструкциях роботов, в научной сфере и сфере образования.
- Медицинской технике.
- Сельском хозяйстве и спецтехнике.
- Деревообрабатывающей промышленности.
- Металлообрабатывающей области, в станках металлорежущих.
- Проволочном производстве.
- Конструкциях прокатных станов, в станках с программным управлением.
- Системы слежения.
- В охранных системах.
- Гидравлических и пневматических системах.
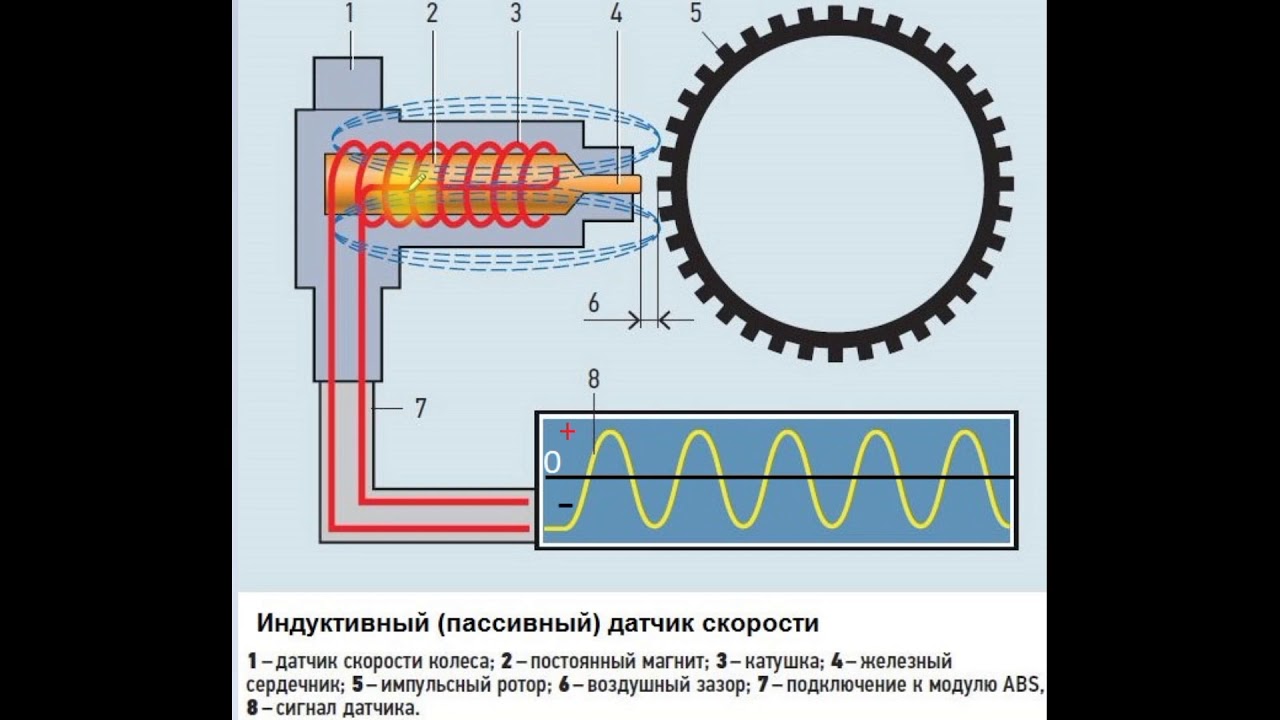
Индуктивный датчик — принцип работы, устройство, фото и видео обзор
Автор Aluarius На чтение 5 мин. Просмотров 3.1k. Опубликовано
Просмотров 3.1k. Опубликовано
Различного типа датчики сегодня широко применяются в промышленности. Без них ни один технологический процесс не обходится. Существует несколько их видов, нас же в этой статье будет интересовать индуктивный датчик. Поэтому разберемся, для чего он необходим, где применяется, его устройство и принцип работы.
Бесконтактные индуктивные датчикиПо сути, датчик данного типа – это прибор, принцип работы которого основан на изменениях индуктивности катушки и сердечника. Кстати, отсюда и само название. Изменения индукции происходят из-за того, что в магнитное поле катушки проникает металлический предмет, изменяя его. А соответственно и изменяется схема подключения, в которой основную роль играет компаратор. Он при изменении индукции подает сигнал на реле или конечный транзистор (выключатель), что приводит к отключению подачи электрического тока.
Поэтому основное предназначение данного прибора – это измерять перемещение части оборудования. И при превышении пределов проходимости отключать его. При этом у датчиков есть свои пределы перемещения, которые варьируются в диапазоне от 1 микрона до 20 миллиметров. Кстати, именно поэтому этот прибор называют и индуктивным датчиком положения.
Достоинства и недостатки
Начнем с достоинств:
- Простота конструкции, достаточно высокая его надежность. Полное отсутствие скользящих контактов, которые быстро выходят из строя.
- Можно использовать для подключения в электрические сети с промышленной частотой.
- Высокая чувствительность.
- Может выдерживать большую выходную мощность.
Недостатки:
- Напряжение и точность работы датчика взаимосвязаны, поэтому нестабильное напряжение в сети становится причиной разброса пределов реагирования.
Параметры индуктивного датчика
Один из параметров уже описывался выше – это диапазон срабатывания.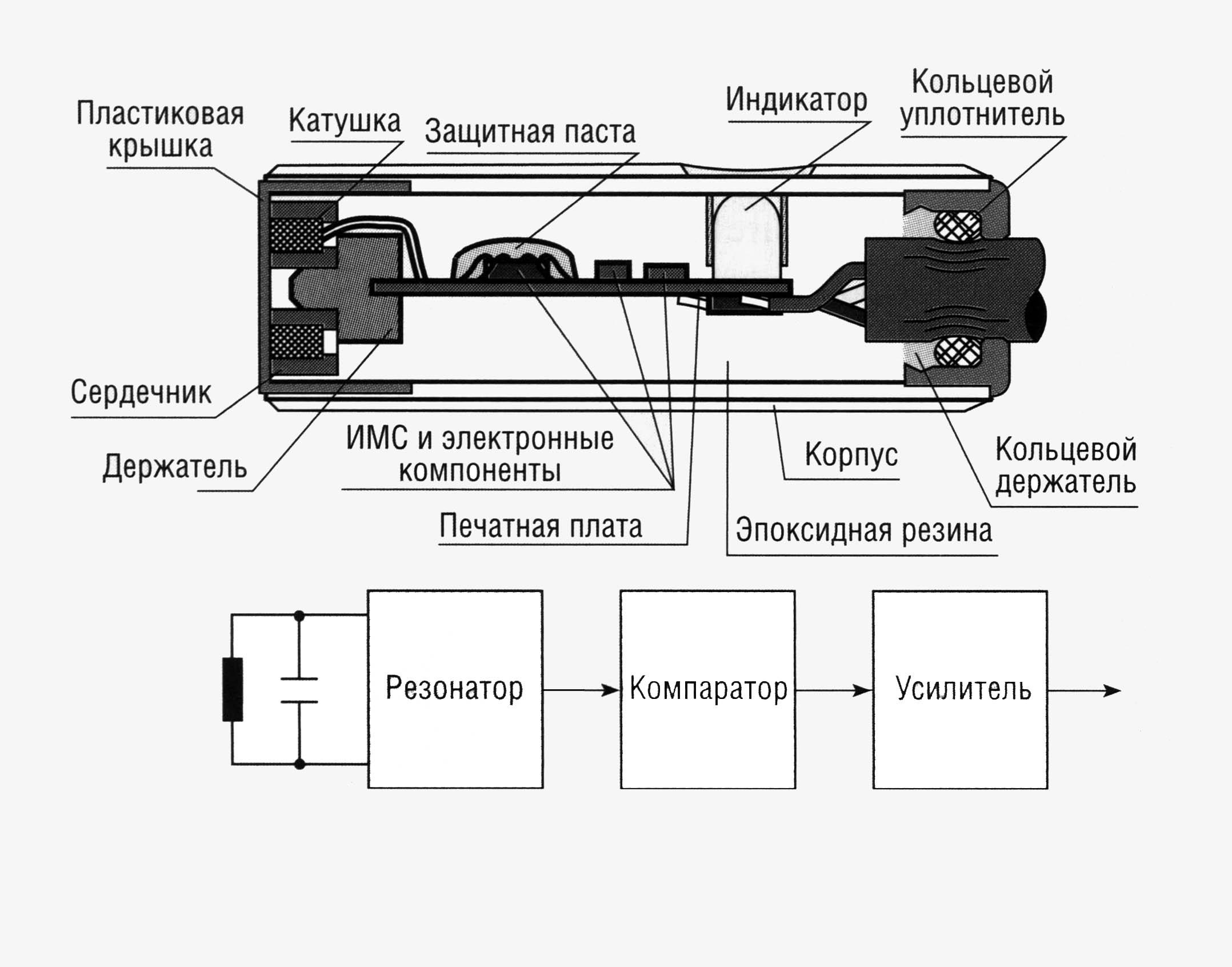 Хотя, как утверждают специалисты, он не является важным, но именно по нему и делают выбор. Все дело в том, что в паспорте изделия указываются номинальные параметры напряжения при работе прибора в температурном режиме +20С. Постоянное напряжение составляет 24 вольт, переменное – 230 вольт. Как вы понимаете, в таких условиях индукционный датчик обычно не работает, а если и работает, то редко. При этом в качестве объекта, который будет изменять индуктивность катушки прибора, должна выступать стальная пластина, ее ширина должна быть равна трем диапазонам срабатывания и толщиною 1 мм.
Хотя, как утверждают специалисты, он не является важным, но именно по нему и делают выбор. Все дело в том, что в паспорте изделия указываются номинальные параметры напряжения при работе прибора в температурном режиме +20С. Постоянное напряжение составляет 24 вольт, переменное – 230 вольт. Как вы понимаете, в таких условиях индукционный датчик обычно не работает, а если и работает, то редко. При этом в качестве объекта, который будет изменять индуктивность катушки прибора, должна выступать стальная пластина, ее ширина должна быть равна трем диапазонам срабатывания и толщиною 1 мм.
На практике же за основу выбора берут два показателя диапазона срабатывания:
- Эффективный.
- Полезный.
Показания первого отличаются от номинального параметра в пределах ±10%. При этом температурный диапазон расширяется от +18С до +28С. Второй определяется, как ±10% от первого при температурном режиме от 25 до 70С. И если при первом параметре используется номинальное напряжение в сети, то при втором присутствует разброс от 85% до 110% от номинала.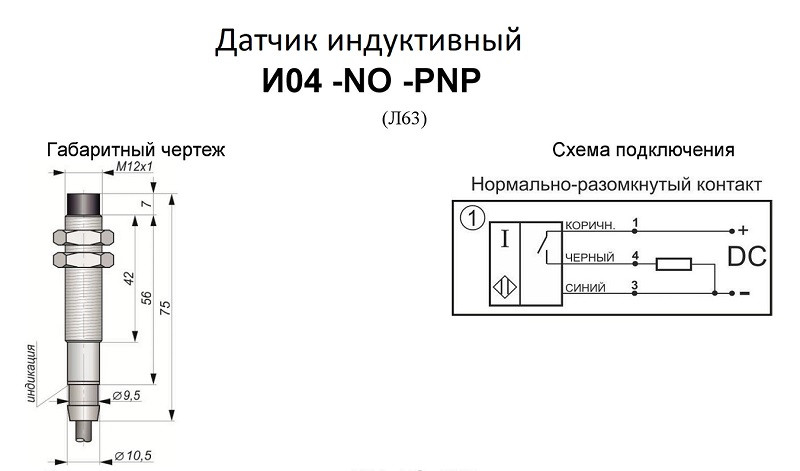
Есть еще один параметр, который связан с зоной срабатывания. Это гарантированный предел. Его нижняя часть равна «0», а верхняя 81% от номинального диапазона.
Необходимо учитывать и такие параметры, как гистерезис и повторяемость. Что такое гистерезис в этом случае? По сути, это расстояние между дальними позициями срабатывания датчика. Оптимальное его значение – это 20% от эффективного диапазона срабатывания.
Не последнее значение имеет и материал, из которого изготавливается объект слежения (перемещения). Оптимальный вариант – сталь 37, ее коэффициент редукции равен «1». Все остальные металлы имеют меньший коэффициент. К примеру, нержавейка – 0,85, медь – 0,3. Как понять, на что влияет коэффициент редукции? Для примера возьмем медную пластину. То есть, получается так, что диапазон срабатывания будет равно 0,3, умноженному на полезный диапазон срабатывания. Достаточно низкий показатель.
Перечислим и другие не столь важные параметры6
- Постоянное напряжение имеет диапазоны: 10-30, 10-60, 5-60 вольт.
 Переменное 98-253 вольт.
Переменное 98-253 вольт.
Индуктивные прямоугольные датчики серии RNВнимание! Производители сегодня предлагают так называемые универсальные индукционные датчики, которые могут работать и от сети переменного тока, и от сети постоянного.
- Ток нагрузки (номинальный) – 200 мА. Сегодня производители иногда производят датчики с токовой нагрузкой 500 мА. Это так называемое специсполнение.
- Частота отклика. Суть этого параметра заключается в том, что он показывает максимальное значение возможности переключаться. Измеряется данный параметр в герцах. Так для основных промышленных датчиков этот показатель равен 1000 Гц.
Способ подключения
Существует несколько разновидностей индуктивных датчиков, которые имеют разное количество проводов подключения.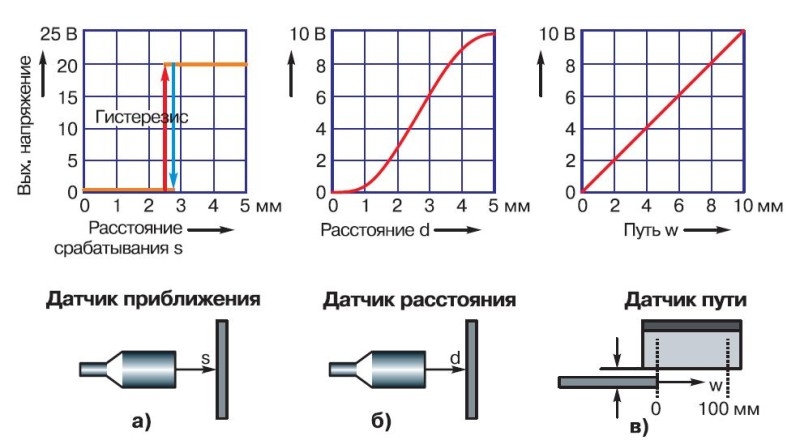
- Двухпроводные. Включаются прямо в цепь токовой нагрузки. Самый простой вариант, но очень капризный. Для него нужен номинальное сопротивление нагрузке. Если он снижается или увеличивается, прибор начинает работать некорректно. При подключении к сети постоянного тока, необходимо соблюдать полярность.
- Трехпроводной. Это самые распространенные индукционные датчики, в которых два провода подключаются к напряжению, один к нагрузке.
- Четырех-, пятипроводные. В них два провода подключаются к нагрузке. Пятый провод – это возможность выбора режима работы.
Цветовая маркировка выводов
Все, что связано с электрическими сетями, особенно проводниками, обязательно обозначается цветовой маркировкой. Делается это для удобства проведения монтажа и обслуживания. Индуктивный датчик этого также не избежал. В нем выходы обозначены определенными стандартными цветами:
- Минус – синий цвет.
- Плюс – красный.
- Выход – черный.

- Бывает и второй выход, он белого цвета, который может быть и входом в систему управления. Об этом производитель обязательно информирует в инструкции.
И последнее – это конструктивные особенности, которые касаются корпуса датчика. Он может иметь цилиндрическую или прямоугольную форму. Изготавливается из металлических сплавов или пластика. Чаще всего в промышленности используются цилиндрические приборы диаметром 12 или 18 мм. Хотя есть в этой размерной линейке и другие параметры: 4, 8, 22 и 30 мм.
Индуктивные датчики. Виды. Устройство. Параметры и применение
Индуктивные датчики – преобразователи параметров. Их работа заключается в изменении индуктивности путем изменения магнитного сопротивления датчика.
Большую популярность индуктивные датчики получили на производстве для измерения перемещений в интервале от 1 микрометра до 20 мм. Индуктивный датчик можно применять для замера уровней жидкости, газообразных веществ, давлений, различных сил. В этих случаях диагностируемый параметр преобразуется чувствительными компонентами в перемещение, далее эта величина поступает на индуктивный преобразователь.
В этих случаях диагностируемый параметр преобразуется чувствительными компонентами в перемещение, далее эта величина поступает на индуктивный преобразователь.
Для замера давления применяются чувствительные элементы. Они играют роль датчиков приближения, предназначенные для выявления разных объектов бесконтактным методом.
Виды и устройство
Индуктивные датчики разделяются по схеме построения на 2 вида:
- Одинарные датчики.
- Дифференциальные датчики.
Первый вид модели имеет одну ветвь измерения, в отличие от дифференциального датчика, у которого две измерительные ветви.
В дифференциальной модели при изменении диагностируемого параметра изменяются индуктивности 2-х катушек. При этом изменение осуществляется на одинаковое значение с противоположным знаком.
Индуктивность катушки вычисляется по формуле: L = WΦ/I
Где W– количество витков; Ф – магнитный поток; I – сила тока, протекающего по катушке. Сила тока взаимосвязана с магнитодвижущей силой следующим отношением: I = Hl/W
Сила тока взаимосвязана с магнитодвижущей силой следующим отношением: I = Hl/W
Из этой формулы получаем: L = W²/Rm
Где R m = H*L/Ф – магнитное сопротивление.
Работа одинарного датчика заключается в свойстве дросселя, изменять индуктивность при увеличении или уменьшении воздушного промежутка.
Конструкция датчика включает в себя ярмо (1), витки обмотки (2), якорь (3), который фиксируется пружинами. По сопротивлению поступает переменный ток на обмотку. Сила тока в нагрузочной цепи вычисляется:
L – индуктивность датчика, rd – активное дроссельное сопротивление. Оно является постоянной величиной, поэтому изменение силы тока I может осуществляться только путем изменения составляющей индуктивности XL=IRн, зависящей от размера воздушного промежутка δ.
Каждой величине зазора соответствует некоторое значение тока, определяющего падение напряжения на резисторе Rн: Uвых=I*Rн – является сигналом выхода датчика.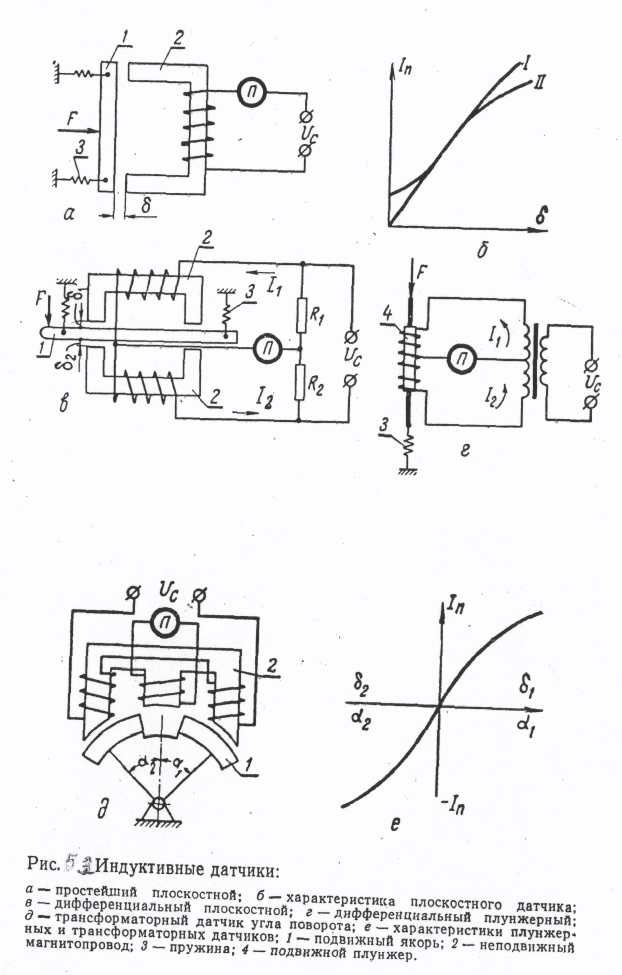 Можно определить следующую зависимость U вых = f (δ), при одном условии, что зазор очень незначительный и потоки рассеивания можно не учитывать, как и магнитное сопротивление металла Rмж в сравнении с магнитным сопротивлением зазора воздуха Rмв.
Можно определить следующую зависимость U вых = f (δ), при одном условии, что зазор очень незначительный и потоки рассеивания можно не учитывать, как и магнитное сопротивление металла Rмж в сравнении с магнитным сопротивлением зазора воздуха Rмв.
Окончательно получается выражение:
На практике активное сопротивление цепи несравнимо ниже индуктивного. Поэтому формула принимает вид:
Из недостатков одинарных можно отметить:
- При эксплуатации датчика на якорь воздействует сила притяжения к сердечнику. Эта сила не уравновешена никакими методами, поэтому она снижает точность функционирования датчика, и вносит некоторый процент погрешности.
- Сила нагрузочного тока зависит от амплитуды напряжения и ее частоты.
- Чтобы измерить перемещение в двух направлениях, нужно установить первоначальное значение зазора, что доставляет определенные неудобства.
Дифференциальные индуктивные датчики объединяют в себе два нереверсивных датчика и изготавливаются в виде некоторой системы, которая состоит из 2-х магнитопроводов, имеющих два отдельных источника напряжения. Для этого чаще всего применяется разделительный трансформатор (5).
Для этого чаще всего применяется разделительный трансформатор (5).
Дифференциальные датчики классифицируются по форме сердечника:
- Индуктивные датчики с Ш-образной формой магнитопровода, выполненного в виде листов электротехнической стали. При частоте более 1 килогерца для сердечника используют пермаллой.
- Цилиндрические индуктивные датчики с круглым магнитопроводом.
Форму датчика выбирают в зависимости от конструкции и ее сочетания с механизмом. Использование магнитопровода Ш-образной формы является удобным для сборки катушки и снижения габаритных размеров индуктивного датчика.
Для функционирования дифференциального датчика применяют питание от трансформатора (5), который имеет вывод от средней точки. Между этим выводом и общим проводом катушек подключают прибор (4). При этом воздушный промежуток находится в пределах от 0,2 до 0,5 мм.
При расположении якоря в средней позиции при равных промежутках индуктивные сопротивления обмоток (3 и 3′) равны. Значит, значения токов катушек также одинаковы, и общий полученный ток в устройстве равен нулю.
Значит, значения токов катушек также одинаковы, и общий полученный ток в устройстве равен нулю.
При малом отклонении якоря в любую сторону изменяется значение воздушных промежутков и индуктивностей. Поэтому прибор определяет ток разности I1-I2, который определен функцией перемещения якоря от средней позиции. Разность токов чаще всего определяется магнитоэлектрическим устройством (4), выполненным по типу микроамперметра со схемой выпрямления (В) на входе.
Полярность тока не зависит от изменения общего сопротивления катушек. При применении фазочувствительных схем выпрямления можно определить направление перемещения якоря от средней позиции.
Параметры
- Одним из параметров индуктивных датчиков является диапазон срабатывания. По этому параметру выбирают датчики, однако он не настолько важен. В инструкции по датчику даны номинальные параметры питания при эксплуатации устройства при температуре +20 градусов.
 Постоянное напряжение для датчика – 24 В, а переменное 230 В. Обычно датчик работает в совершенно других условиях.
Постоянное напряжение для датчика – 24 В, а переменное 230 В. Обычно датчик работает в совершенно других условиях.
На практике при подборе датчика важны два показателя интервала срабатывания:
— Полезный.
— Эффективный.
Показания первого вычисляются как +10% от 2-го при температуре 25-70 градусов. Показания 2-го отличаются от номинала на 10%. Интервал температуры при этом увеличивается с 18 до 28 градусов. Если при втором параметре применяется номинальное напряжение, то при первом есть разброс 85-110%.
- Другим параметром является гарантированный предел срабатывания. Он колеблется от нуля до 81% от номинала.
- Также следует учитывать параметры: повторяемость и гистерезис, который равен расстоянию между конечными позициями работы датчика. Его оптимальная величина равна 20% от эффективного интервала срабатывания.
- Нагрузочный ток. Изготовители иногда производят датчики специального исполнения на 500 миллиампер.

- Частота отклика. Этот параметр определяет наибольшую величину возможности переключения в герцах. Основные промышленные датчики имеют частоту отклика 1000 герц.
Методы подключения на схемах
Имеется несколько видов индуктивных датчиков с различным числом проводов для подключения. Рассмотрим основные виды подключений разных индуктивных датчиков.
- Двухпроводные индуктивные датчики подключаются непосредственно в нагрузочную цепь. Это наиболее простой способ, однако в нем есть особенности. Для такого способа для нагрузки требуется номинальное сопротивление. Если это сопротивление будет больше или меньше, то устройство функционирует некорректно. При включении датчика на постоянный ток нельзя забывать о полярности выводов.
- Трехпроводные индуктивные датчики наиболее популярны. В них имеется два проводника для подключения питания, а один для нагрузки.
- Четырехпроводные и пятипроводные индуктивные датчики.
 У них два провода на питание, другие два на нагрузку, пятый проводник для выбора режима эксплуатации.
У них два провода на питание, другие два на нагрузку, пятый проводник для выбора режима эксплуатации.
Цветовая маркировка
Маркировка проводников цветом является очень удобной для осуществления обслуживания и монтажа датчиков. Их выходные проводники промаркированы определенным цветом:
- Минус – синий.
- Плюс – красный.
- Выход – черный цвет.
- Второй проводник выхода – белый цвет.
Погрешности
Погрешность преобразования диагностируемого параметра влияет на способность выдачи информации индуктивным датчиком. Суммарная погрешность состоит из множества различных погрешностей.
- Электромагнитная погрешность является случайной величиной. Она появляется вследствие индуцирования ЭДС в катушке датчика наружными магнитными полями. На производстве возле силовых электрических устройств существуют магнитные поля чаще всего частотой 50 герц.
- Погрешность от температуры также является случайным значением, так как работа большого количества элементов датчика зависит от температуры и является значительной величиной, учитываемой при проектировании датчиков.

- Погрешность магнитной упругости. Она появляется от нестабильности деформаций сердечника при сборке прибора, а также из-за изменения деформаций при работе. Влияние нестабильности напряжений в магнитопроводе образует нестабильность сигнала на выходе.
- Погрешности устройства появляются по причине влияния измеряющей силы на деформации элементов датчика, а также влияния скачка усилия измерения на нестабильность деформации. Также на погрешность влияют люфты и зазоры в подвижных частях конструкции датчика.
Погрешность кабеля образуется от непостоянной величины сопротивления, деформации кабеля и его температуры, наводок электродвижущей силы в кабеле от внешних полей.
- Тензометрическая погрешность случайная величина и зависит от качества намотки витков провода. При намотке возникают механические напряжения, изменение которых при функционировании датчика приводит к изменению сопротивления обмотки постоянному току, а значит, изменению сигнала на выходе. Чаще всего в качественных датчиках эту погрешность не учитывают.
- Погрешность старения датчика появляется от износа движущихся частей устройства датчика, а также постоянного изменения электромагнитных свойств магнитопровода. Такую погрешность считают также случайным значением. При определении погрешности износа учитывается кинематика устройства датчика. При проектировании датчика рекомендуется определять его срок эксплуатации в нормальном режиме, за период которого погрешность от износа не превзойдет заданного значения.
- Погрешность технологии появляется при отклонениях от техпроцесса изготовления датчика, разброса параметров катушек и элементов при сборке, от влияния натягов и зазоров при сопряжении деталей. Оценка погрешности технологии производится простыми механическими измерителями.
Электромагнитные параметры материалов и их свойства со временем меняются. Чаще всего процессы изменения свойств материалов происходят в первые 200 часов после термообработки сердечника магнитопровода. Далее эти свойства остаются теми же, и не влияют на полную погрешность датчика.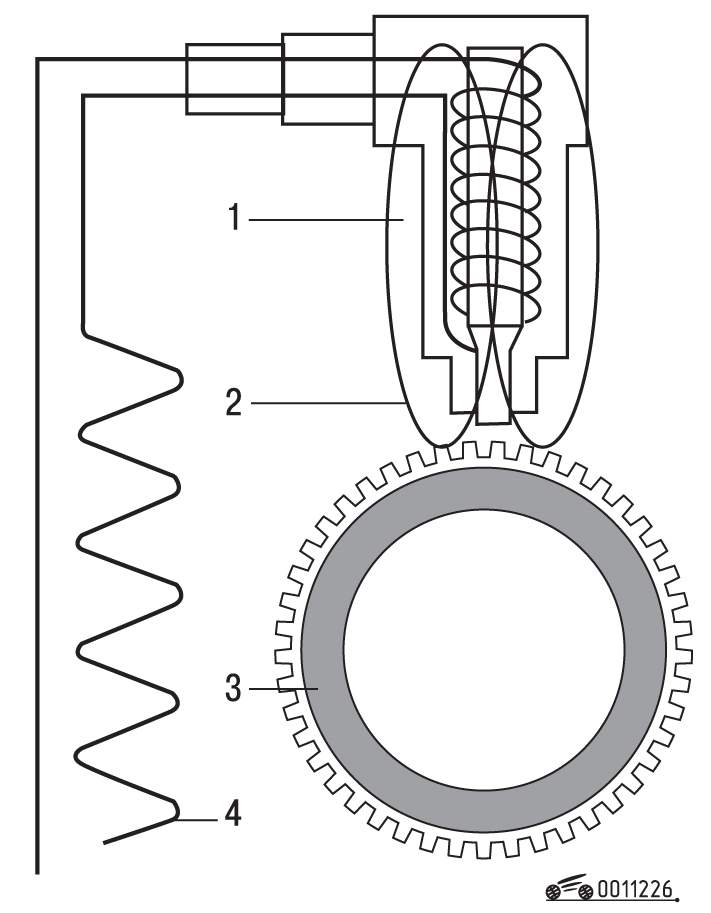
Достоинства
- Большая чувствительность.
- Повышенная мощность выхода, до нескольких десятков Вт.
- Возможность подключения к промышленным источникам частоты.
- Прочное и простое устройство.
- Нет трущихся контактов.
Недостатки
- Способны функционировать только на переменном напряжении.
- Стабильность питания и частота влияют на точность работы датчика.
Сфера использования
- Медицинские аппараты.
- Бытовая техника.
- Автомобильная промышленность.
- Робототехническое оборудование.
- Промышленная техника регулирования и измерения.
Похожие темы:
«Принцип работы индуктивных датчиков?» – Яндекс.Кью
Чтобы понять принцип работы индуктивного датчика, разберём его составляющие.
Состоит индуктивный датчик:
1. Электромагнитная система → 2. Генератор → 3. Демодулятор → 4. Пороговое устройство → 5. Выходной усилитель
1 – электромагнитная система.
Её также называют чувствительным элементом датчика. Электромагнитная система является частью генератора.
Она представляет собой катушку индуктивности, помещенную в магнитопровод. Чаще всего это круглая ферритовая чашка. Чашки в зависимости от габаритов датчика могут иметь диаметр от 3,3 мм до 150 мм.
С внешней стороны ферритовый сердечник закрыт диэлектрическим колпачком. Его торцевая часть называется чувствительной поверхностью.
Область перед чувствительной поверхностью является зоной чувствительности датчика. Там сконцентрировано магнитное поле. Оно распространяется примерно на половину диаметра датчика.
2 — генератор.
Это та часть электронной схемы датчика, которая вырабатывает электрические колебания. Генератор формирует переменное электромагнитное поле, в сечении напоминающее букву М.
Катушка индуктивности и конденсатор (устройство для накопления заряда и энергии электрического поля) образуют колебательный контур. Генератор вырабатывает незатухающие синусоидальные колебания. При попадании металлического объекта в зону чувствительности датчика в нём образуются вихревые токи. Они создают встречный магнитный поток, демпфирующий колебания контура. Другими словами, происходит затухание электромагнитных колебаний, уменьшается их амплитуда. Чем ближе металлический объект к чувствительной поверхности датчика и чем больше его размер, тем сильнее затухание.
Генератор вырабатывает незатухающие синусоидальные колебания. При попадании металлического объекта в зону чувствительности датчика в нём образуются вихревые токи. Они создают встречный магнитный поток, демпфирующий колебания контура. Другими словами, происходит затухание электромагнитных колебаний, уменьшается их амплитуда. Чем ближе металлический объект к чувствительной поверхности датчика и чем больше его размер, тем сильнее затухание.
3 — демодулятор или детектор, он же выпрямитель.
Преобразует изменение высокочастотных колебаний генератора в изменение постоянного напряжения.
4 — пороговое устройство сравнивает переданное демодулятором напряжение с заранее установленным порогом срабатывания.
При достижении порога формируется логический сигнал «0 или 1» (т. е. «выключение / или включение»). Таким образом, пороговое устройство преобразует аналоговый сигнал детектора в «цифровой»выходной, его ещё называют дискретным.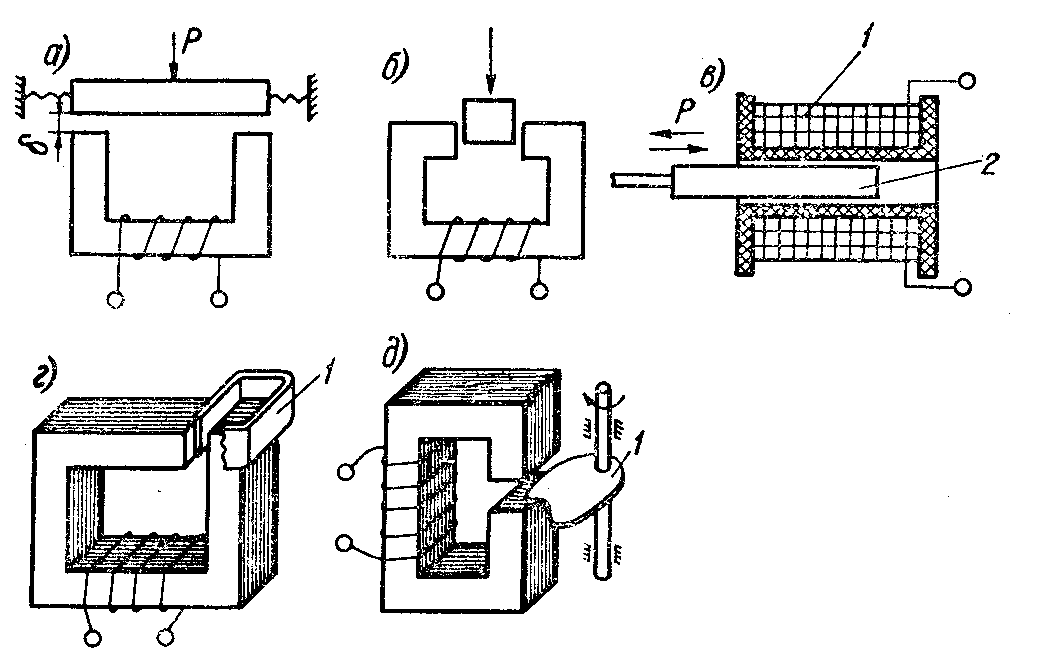
В качестве порогового устройства используются как транзисторные, так и микросхемные варианты компараторов и триггеров Шмитта.
Особенностью порогового устройства является то, что пороги переключения из «0» в «1» и из «1» в «0» не совпадают. Это делается преднамеренно для повышения помехоустойчивости датчика. Данное свойство называют гистерезисом.
5 — выходной усилитель увеличивает мощность выходного сигнала до необходимого значения для передачи последующим устройствам.
Выходной усилитель часто называют выходным ключом, так как он оперирует логическими значениями 0 и 1.
В качестве выходного ключа могут использоваться транзисторы разных типов, тиристоры (симисторы), реле электромагнитные, реле твердотельные, оптроны, специализированные микросхемы (интеллектуальные ключи).
Электромагнитная система, генератор, демодулятор, пороговое устройство и выходной усилитель являются основой индуктивных датчиков.
Подытожим:
Принцип действия индуктивного датчика основан на изменении параметров электромагнитного поля при вхождении металлического объекта в зону чувствительности. Эти изменения фиксируются электронной схемой датчика и изменяют его состояние. В результате этого происходит коммутация выходных цепей: размыкание нормально замкнутого, замыкание нормально разомкнутого или переключение контактов.
измеряем линейное перемещение и вращение
18 августа 2016
Бесконтактные датчики обеспечивают повышенную надежность и долговечность при определении местоположения объекта и получении информации об его перемещении. Компания Texas Instruments выпускает линейку надежных и современных микросхем цифровых преобразователей для индуктивных датчиков, а также разработала ряд типовых решений на их основе.
В системах промышленной и автомобильной электроники довольно часто используются датчики для предоставления информации, связанной с анализом металлических предметов и поверхностей. Например, это может быть информация, подтверждающая присутствие предмета в определенном месте и частоту возникновения определенного события, информация о точном месторасположении интересующего объекта. Если при этом эксплуатация изделия происходит при наличии в окружающей среде грязи, пыли, машинного масла, повышенной влажности, то выбор технологии измерения индуктивности для реализации конечного изделия будет вполне обоснован. Принцип действия индуктивных датчиков основывается на реакции магнитного поля, излучаемого датчиком, на токопроводящий объект, попадающий в него. Магнитное поле создается током, протекающим в катушке индуктивности, и не требует наличия дополнительного внешнего магнита. Конструкция катушки индуктивности определяется необходимыми параметрами датчика и конструктивными особенностями изделия. Для создания магнитного поля может быть использован любой тип катушки: готовая моточная катушка, катушка, реализованная на печатной плате или даже простая металлическая пружина (рисунок 1).
Например, это может быть информация, подтверждающая присутствие предмета в определенном месте и частоту возникновения определенного события, информация о точном месторасположении интересующего объекта. Если при этом эксплуатация изделия происходит при наличии в окружающей среде грязи, пыли, машинного масла, повышенной влажности, то выбор технологии измерения индуктивности для реализации конечного изделия будет вполне обоснован. Принцип действия индуктивных датчиков основывается на реакции магнитного поля, излучаемого датчиком, на токопроводящий объект, попадающий в него. Магнитное поле создается током, протекающим в катушке индуктивности, и не требует наличия дополнительного внешнего магнита. Конструкция катушки индуктивности определяется необходимыми параметрами датчика и конструктивными особенностями изделия. Для создания магнитного поля может быть использован любой тип катушки: готовая моточная катушка, катушка, реализованная на печатной плате или даже простая металлическая пружина (рисунок 1).
Рис. 1. Различные варианты катушки индуктивности в датчиках
Технология измерения параметров системы с помощью индуктивности существует не одно десятилетие. Ранее для ее реализации требовалась сложная аналоговая схемотехника, что делало ее слишком дорогой для применения за пределами промышленных изделий и портативных металлодетекторов. На сегодняшний день существующие специализированные микросхемы и универсальные микроконтроллеры позволяют реализовать простые бюджетные индуктивные датчики.
Основные особенности, которые позволяют активно использовать индуктивные датчики – это простота конструкции, высокая точность, линейность и надежность. Последняя обусловлена тем, что попадание загрязнения между датчиком и исследуемым объектом не влияет на результаты измерения. Измерение индуктивности позволяет получить исключительные характеристики и надежность при относительно низкой себестоимости в сравнении с альтернативными решениями. Технология измерения с помощью индуктивности может быть использована для точного определения линейного и углового месторасположения предмета, величины сжатия пружин, силы вибрации, для определения состава металла. На ее основе возможна реализация различных органов управления (кнопки, регуляторы, переключатели), турбинных расходомеров, драйверов двигателей и так далее. Области применения индуктивных датчиков достаточно разнообразны и включают в себя различные сегменты рынка: автомобильный, рынок товаров широкого потребления, мобильных устройств, промышленный и медицинский.
Измерение индуктивности позволяет получить исключительные характеристики и надежность при относительно низкой себестоимости в сравнении с альтернативными решениями. Технология измерения с помощью индуктивности может быть использована для точного определения линейного и углового месторасположения предмета, величины сжатия пружин, силы вибрации, для определения состава металла. На ее основе возможна реализация различных органов управления (кнопки, регуляторы, переключатели), турбинных расходомеров, драйверов двигателей и так далее. Области применения индуктивных датчиков достаточно разнообразны и включают в себя различные сегменты рынка: автомобильный, рынок товаров широкого потребления, мобильных устройств, промышленный и медицинский.
Основные принципы работы индуктивных датчиков
Переменный ток, протекающий через катушку, создает переменное магнитное поле. При помещении в него проводящего материала, например, любого предмета, в состав которого входит железо, часть энергии магнитного поля передается на металлический объект.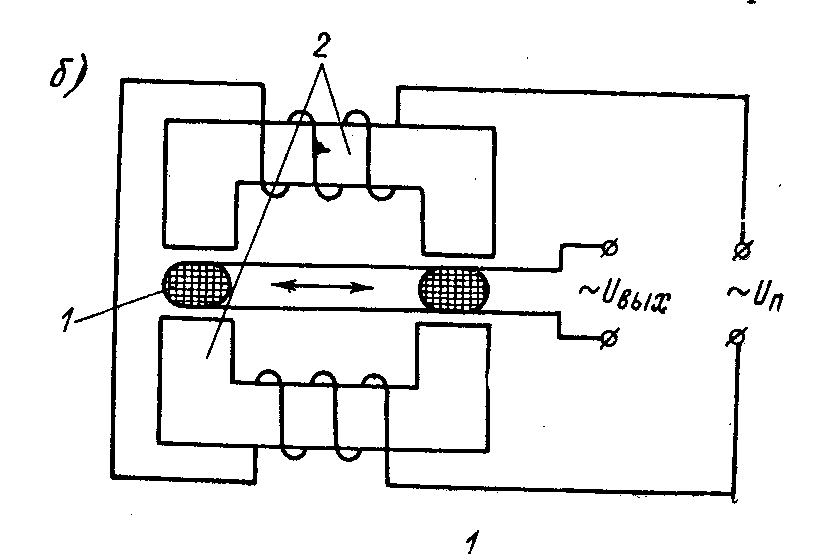 Эта переданная энергия индуцирует на поверхности объекта вихревые токи, известные как токи Фуко. Их величина зависит от размера и состава метала, а также расположения объекта относительно магнитного поля. Индуцированные вихревые токи в металлическом объекте создают собственное магнитное поле (встречное поле или вторичное поле), которое взаимодействует с первичным полем, генерируемым катушкой. За счет воздействий уменьшается эффективная индуктивность катушки, тем самым изменяя резонансную частоту контура, в который включена индуктивность.
Эта переданная энергия индуцирует на поверхности объекта вихревые токи, известные как токи Фуко. Их величина зависит от размера и состава метала, а также расположения объекта относительно магнитного поля. Индуцированные вихревые токи в металлическом объекте создают собственное магнитное поле (встречное поле или вторичное поле), которое взаимодействует с первичным полем, генерируемым катушкой. За счет воздействий уменьшается эффективная индуктивность катушки, тем самым изменяя резонансную частоту контура, в который включена индуктивность.
Для создания L-C-резонатора (L-C-контура), который используется для генерации электромагнитного поля, необходимо всего два элемента – индуктивность и конденсатор. Изменение магнитного поля LC-резонатора, вызванное попаданием в него токопроводящего объекта, проявляется как смещение резонансной частоты. Такое смещение обусловлено изменением величины эффективной индуктивности катушки контура.
Для упрощения процесса разработки индуктивных датчиков компания Texas Instruments c 2013 года выпускает семейство цифровых преобразователей LDC. Микросхемы цифровых преобразователей LCD производят измерение импеданса и резонансной частоты L-C-контура. (рисунок 2, таблица 1). Выходными данными в преобразователях является цифровое значение, пропорциональное частоте. Значение частоты может быть преобразовано в значение эквивалентной индуктивности.
Микросхемы цифровых преобразователей LCD производят измерение импеданса и резонансной частоты L-C-контура. (рисунок 2, таблица 1). Выходными данными в преобразователях является цифровое значение, пропорциональное частоте. Значение частоты может быть преобразовано в значение эквивалентной индуктивности.
Рис. 2. Линейка индуктивных интерфейсов
Таблица 1. Краткие характеристики индуктивных интерфейсов
| Параметры | Наименование | ||||||
| LDC0851 | LDC1101 | LDC1612/ LDC1612-Q1 | LDC1314/ LDC1314-Q1 | LDC1312/ LDC1312-Q1 | LDC1614/ LDC1614-Q1 | LDC1000-Q1 | |
| Количество каналов | 1 | 1 | 2 | 4 | 2 | 4 | 1 |
Ток потребления, тип. , мА , мА | – | 2 | 2,1 | 2,1 | 2,1 | 2,1 | 1,7 |
| Напряжение аналогового питания, мин., В | 1,,8 | 1,71 | 2,7 | 2,7 | 2,7 | 2,7 | 4,75 |
| Напряжение аналогового питания, макс., В | 3,3 | 3,46 | 3,6 | 3,6 | 3,6 | 3,6 | 5,25 |
| Напряжение цифрового питания, мин., В | – | – | – | – | – | – | 1,8 |
| Напряжение цифрового питания, макс., В | – | – | – | – | – | – | 5,25 |
| Интерфейс | Двухтактный выход | SPI | I2C | I2C | I2C | I2C | SPI |
| L-разрешающая способность, бит | – | 24 | 28 | 12 | 12 | 28 | 24 |
Амплитуда сигнала, макс.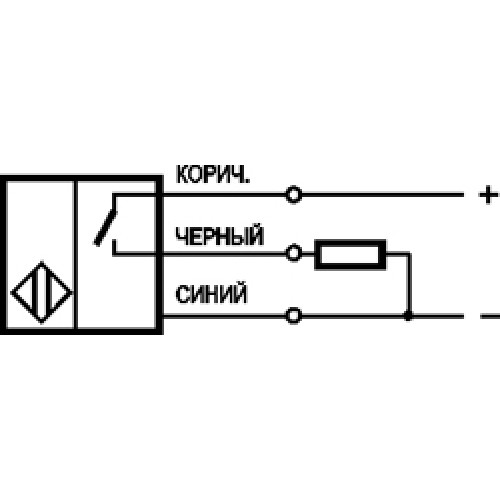 , В , В | – | – | 1,8 | 1,8 | 1,8 | 1,8 | 4 |
| Частота датчика, MГц | 0,3…19 | 0,5…10 | 0,001…10 | 0,001…10 | 0,001…10 | 0,001…10 | 0,005…5 |
| Ток в режиме ожидания, тип., мкА | – | 150 | 35 | 35 | 35 | 35 | 250 |
| Рабочий диапазон температур, °С | -40…125 | -40…125 | -40…125 | -40…125 | -40…125 | -40…125 | -40…125; -40…150 |
| Корпус | WSON | VSON | WSON | WQFN | WSON | WQFN | TSSOP |
| Размер корпуса, мм2 (ШхД) | 4 (2×2) | 9 (3×3) | 16 (4×4) | 16 (4×4) | 16 (4×4) | 16 (4×4) | 32 (6,4×5) |
Микросхемы в выпускаемой на сегодняшний день линейке индуктивных преобразователей Texas Instruments можно разделить на следующие группы: переключатели, одноканальные преобразователи, многоканальные преобразователи.
Относительно новой позицией в линейке индуктивных преобразователей Texas Instruments является микросхема индуктивного переключателя LDC0851. Это твердотельный переключатель, в котором уровень выходного сигнала на выходе зависит от величины индуктивности на входе.
Датчик линейного перемещения
Одним из распространенных способов определения линейного месторасположения объекта является реализация системы с использованием редкоземельных магнитов. Использование микросхем линейки LDCxxxx позволяет упростить задачу и уменьшить стоимость конечного решения за счет исключения из конструкции магнита. Примером может быть решение Texas Instruments – TIDM-INDUCTIVELINEAR на базе LDC1612. (рисунки 3, 4)
Рис. 3. LDC1612 в датчике линейного перемещения (TIDM-INDUCTIVELINEAR)
Рис. 4. Блок-схема LDC1612
Представленное решение (рисунок 5) позволяет реализовать индуктивное измерение линейного местоположения металлического предмета с помощью двух микросхем: микропроцессора MSP430 с ESI-интерфейсом и LDC1612. Особенностью предложенного решения является использование для детектирования наличия объекта специального модуля микроконтроллера ESI (Extended Scan Interfacе – расширенный интерфейс сканирования), а для более точных измерений – возможности переключаться на использование данных от LDC1612. Такое решение позволяет значительно сократить энергопотребление системы. Таким образом, совмещая преимущества ESI, реализованного в микроконтроллере MSP430, с технологией преобразования индуктивности в код, можно реализовать бюджетное решение для определения линейного месторасположения с низким энергопотреблением.
Особенностью предложенного решения является использование для детектирования наличия объекта специального модуля микроконтроллера ESI (Extended Scan Interfacе – расширенный интерфейс сканирования), а для более точных измерений – возможности переключаться на использование данных от LDC1612. Такое решение позволяет значительно сократить энергопотребление системы. Таким образом, совмещая преимущества ESI, реализованного в микроконтроллере MSP430, с технологией преобразования индуктивности в код, можно реализовать бюджетное решение для определения линейного месторасположения с низким энергопотреблением.
Рис. 5. Блок-схема TIDM-INDUCTIVELINEAR
Преобразователь LDC1612 состоит из входных драйверов резонатора, подсоединенных к мультиплексору, через который активные каналы подсоединяются к основному ядру. С помощью основного ядра происходит измерение и преобразование в цифровой код частоты датчика. В качестве опорной частоты в преобразователе используется частота либо внутреннего генератора, либо внешнего.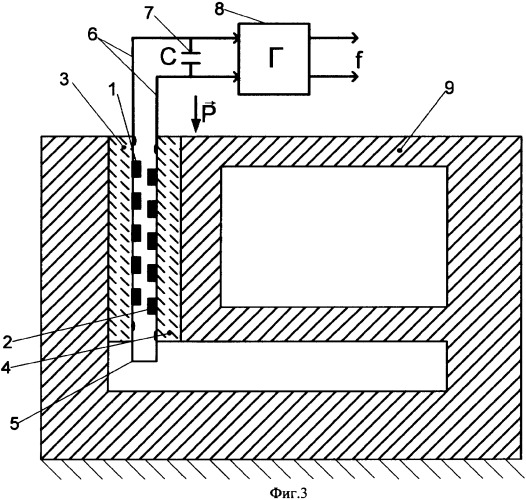 Получаемый цифровой код пропорционален отношению измеренной частоты датчика к частоте опорного генератора. Для управления режимом работы микросхемы и передачи данных к внешнему микроконтроллеру используется интерфейс I2C (рисунок 5).
Получаемый цифровой код пропорционален отношению измеренной частоты датчика к частоте опорного генератора. Для управления режимом работы микросхемы и передачи данных к внешнему микроконтроллеру используется интерфейс I2C (рисунок 5).
Для определения линейного месторасположения предмета, кроме придания определенной формы самому предмету, можно придать определенную форму переменному магнитному полю, генерируемому катушкой индуктивности. Основная идея – это создание неоднородного магнитного поля в зоне измерения. В зависимости от горизонтального положения вдоль катушки сила поля должна меняться. При использовании прямоугольного объекта катушка должна иметь неоднородное поле. Это может быть достигнуто за счет растягивания катушки так, чтобы поле было более сильным с одного ее конца.
На рисунке 6 показан пример такой системы, где прямоугольный объект перемещается вдоль оси Х датчика с сохранением постоянного воздушного зазора. Перемещение создает на выходе преобразователя LDC-сигнал, который можно использовать для определения месторасположения объекта. Преимущества использования вытянутой катушки индуктивности (прямоугольной PCB-катушки с уменьшающимся количеством витков на секцию) в паре с прямоугольным объектом по сравнению с обычной круглой катушкой в паре с треугольным объектом заключается в том, что объект может быть значительно меньше самой катушки. Для многих применений, где пространство для движущихся объектов ограничено, решение с использованием растянутой катушки позволяет обойти эти ограничения.
Рис. 6. Горизонтальное перемещение прямоугольного объекта вдоль PCB-катушки
В представленном типовом проекте используется катушка с 23 витками на слой, выполненная в четырех слоях. Переменное магнитное поле наиболее сильно со стороны самых удаленных витков и ослабевает при перемещении влево, поэтому наибольшую силу переменное магнитное поле имеет справа от геометрического центра катушки. Компания Texas Instruments предлагает скрипт для создания вытянутой катушки для применений, где требуется определение горизонтального месторасположения.
При использовании вытянутой катушки индуктивности следует учитывать, что длина и ширина объекта влияют на полученную разрешающую способность и диапазон измерения. Чем длиннее объект, тем большую разрешающую способность можно получить, при этом ограничивается диапазон измерения. Ширина объекта при этом должна перекрывать катушку для обеспечения максимального влияния металла на магнитное поле катушки.
Благодаря широкому диапазону частот генерации и выходных токов LDC1612 дает дополнительную гибкость при выборе размера индуктивности, которая наилучшим образом подходит под механические требования системы. Тем не менее, следует учитывать, что частота резонаторного контура должна быть в диапазоне 1 кГц…10 МГц. И хотя нет абсолютных требований к величине индуктивности катушки, необходимо гарантировать, чтобы резонансная частота и потери на параллельном сопротивлении не превышали заданные в спецификации значения. Также рекомендуется размещать емкость LC-контура как можно ближе к катушке индуктивности для уменьшения влияния паразитного сопротивления и индуктивности проводников на плате. Длина проводников между контуром и микросхемой не столь критична, так как не влияет на резонансную частоту.
Использование индуктивности, которая работает на максимально возможной частоте для прецизионных применений предпочтительно, так как в таких сенсорах будет меньше витков, что позволяет уменьшить температурный дрейф из-за изменения сопротивления объекта.
Дополнительными факторами, которые могут повлиять на ошибку при определении месторасположения объекта, могут быть неправильно рассчитанные полиноминальные коэффициенты. Для получения достоверных коэффициентов необходимо собрать данные по всей длине индуктивности при различной величине воздушного зазора и рассчитать полином 3-го порядка, чтобы получить наилучшую аппроксимацию.
На рисунке 7 приведен результат измерения индуктивности в зависимости от линейного положения объекта. Нулевой отметке (0 мм) соответствует положение объекта на стороне с наименьшей плотностью витков, а отметке 100 мм – область с наибольшей плотностью витков (рисунок 6). Из полученного графика видно, что наиболее оптимальным для использования является средний участок – 20…90 мм. На данном участке мы имеем почти линейную зависимость индуктивности от месторасположения объекта и можем получить максимальную точность. Участок 0…20 мм также может быть использован для определения месторасположения. Однако из-за малой величины изменения индуктивности точность измерения здесь будет минимальна. Область выше 90 мм, которая соответствует переходу через центр катушки индуктивности, не пригодна для нахождения месторасположения, так как имеет немонотонную зависимость.
Рис. 7. Изменение индуктивности при линейном перемещении металлического объекта
Счетчик событий
Счетчик событий используется для определения скорости и положения ротора вентилятора, расходомера и тому подобного. Зачастую такие счетчики событий строятся с использованием датчиков Холла или оптических датчиков. И то, и другое решение позволяет реализовать бесконтактное измерение со своими особенностями. Необходимость использования магнита в решении на базе датчика Холла ведет к дополнительному удорожанию изделия. Решения, использующие оптические датчики, подвержены влиянию грязи и пыли, что сказывается на времени жизни изделия. Применение катушки индуктивности позволяет реализовать надежную систему с рядом дополнительных преимуществ, а именно – повторяемым порогом срабатывания, невосприимчивостью к таким внешним факторам как температура и влажность. Более того, данная технология чрезвычайно устойчива при работе в жестких условиях и может использоваться там, где необходимо обеспечить водозащищенное решение.
Рис. 8. Функциональная блок-схема решения TIDA-00851-LDC0851
Представленное решение TIDA-00851-LDC0851 (рисунок 8) на базе индуктивного датчика не требует использования дополнительного магнита. Разработанный прибор обеспечивает надежную работу в среде с повышенной загрязненностью, влажностью или при наличии смазки, что является непростой задачей при использовании альтернативных датчиков. Применение индуктивного датчика упрощает задачу и увеличивает долговременную надежность для таких задач как подсчет количества зубьев, определение скорости вращения и тому подобного для промышленных и автомобильных систем. И если для большинства систем, где для обнаружения используется индуктивный датчик, проводящий объект должен быть расположен параллельно катушке индуктивности, то в предложенном варианте объект располагается перпендикулярно измерительной катушке. Индуктивность катушки будет увеличиваться или уменьшаться в зависимости от положения проводящего объекта. Соответственно, частота датчика увеличивается, когда объект приближается к катушке датчика, что вызвано уменьшением индуктивности. В приведенном примере в качестве детектируемых объектов применены медные полоски, прикрепленные к лопастям вентилятора. Полоски проходят около катушки при вращении вентилятора (рисунок 9).
Рис. 9. LDC0851 в схеме измерения числа оборотов вентилятора
При работе с объектами, которые имеют малую поверхностную площадь, например, такими как край вентилятора, применяются специальные решения. Это обусловлено необходимостью обнаруживать небольшое отклонение индуктивности при прохождении объекта рядом с сенсором. Объект, обладающий площадью большей или равной площади измерительной катушки, создает максимальный сдвиг частоты, поэтому в представленном решении для гарантирования того, что объект с малой поверхностной площадью может быть обнаружен на расстоянии до 3 мм, используется специальный подход. В разводку платы преднамеренно введено рассогласование между измерительной и опорной индуктивностью. Оно введено таким образом, что при отсутствии металлического объекта индуктивность измерительного датчика меньше опорной индуктивности, а когда объект присутствует – наоборот, опорная индуктивность меньше измерительной. Для этого в измерительной индуктивности могут использоваться короткие проводники или уменьшена индуктивность на половину витка. Это позволяет увеличить диапазон чувствительности при использовании LDC0851 для заданного объекта.
Для надежной работы необходимо, чтобы диаметр индуктивности был хотя бы в три раза больше измеряемого расстояния. Больший диаметр обеспечивает лучшие параметры системы. Тем не менее, следует учитывать некоторые ограничения. Если диаметр индуктивности превышает размер объекта, то минимальное воздействие малого объекта ослабит максимально возможный сдвиг по частоте. Использование большего объекта значительно увеличивает чувствительность системы, что может быть использовано либо для увеличения измеряемого диапазона, либо для улучшения точности измерения. Однако увеличение диаметра объекта до величины значительно больше размера катушки не дает пропорциональное улучшение отклика.
Дополнительно при использовании LDC08051 следует учитывать ограничения, накладываемые характеристиками микросхемы: частота датчика должна находиться в диапазоне 300 кГц…19 МГц; минимальная емкость датчика должна быть более 33 пФ; ток датчика не должен превышать 6 мА при питании 3,3 В.
В данном приложении LDC0851 постоянно измеряет основную и опорную катушки. При обнаружении объекта преобразователь вызывает прерывание микроконтроллера MSP430F5528. Алгоритм микроконтроллера сравнивает метку времени текущего события с предыдущей для определения скорости вращения. Для компенсации минимальных вариаций скорости вращения вентилятора метки времени обрабатываются с помощью фильтра со скользящим усреднением.
З2-позиционный датчик угла поворота
Традиционно датчики угла поворота выполняются с использованием систем с механическими контактами. Вследствие присутствия контактов такие системы имеют проблемы с долговременной надежностью, что приводит к необходимости их замены из-за износа движущихся частей. Альтернативным решением является использование оптических датчиков, но такое решение подвержено негативному влиянию грязи и пыли, что уменьшает время наработки на отказ во многих автомобильных и промышленных системах. Вариант использования магнитных датчиков позволяет решить проблемы с грязью и пылью, но несвободен от воздействия внешних магнитных полей, что уменьшает надежность изделия. Индуктивный датчик позволяет реализовать надежный вращающийся бесконтактный управляющий элемент. Более того, данная технология обладает повышенной устойчивостью при работе в жестких внешних условиях и может быть выполнена в водостойком варианте.
Предложенное решение шагового датчика угла поворота TIDA-00828 позволяет реализовать надежный круговой регулятор для различных промышленных, потребительских и автомобильных применений. Использование индуктивных датчиков обеспечивает надежную работу в среде с повышенным загрязнением/влажностью и не требует дополнительных магнитов. Основным узлом регулятора являются две микросхемы LDC0851 (рисунок 10).
Рис. 10. LDC0851 в cхеме энкодера
(TIDA-00828)
Решение представляет собой набор из нескольких элементов: индуктивного датчика, платы с проводящими детектируемыми элементами, ручки управления. Индуктивный датчик со всеми необходимыми элементами выполнен в виде платы. Плата с детектируемыми проводящими элементами присоединяется к ручке управления и вращается на определенном расстоянии над уровнем платы с индуктивными датчиками (рисунок 11). Плата с детектируемыми элементами содержит только набор медных проводников и не требует никаких дополнительных элементов. При вращении ручки сигнал на выходах LDC0851 изменяется, тем самым передавая микроконтроллеру сигнал о смене положения и количестве измененных позиций. Две микросхемы необходимы для определения направления поворота. Каждая имеет свой датчик и опорную индуктивность. Датчики и детектируемые элементы расположены так, что данные на выходе микросхем выдают сигнал в виде кода Грея. Таким образом, исходя из полученной последовательности, можно вычислить, в какую сторону двигалась ручка управления. В данном дизайне последовательность «00_01_11_10_00» соответствует повороту по часовой стрелке, тогда как обратная последовательность – «00_10_11_01_00», – соответствует повороту против часовой стрелки. Предложенный вариант расположения датчиков и детектируемых элементов позволяет обеспечить 32-позиционную систему определения кругового месторасположения (рисунок 12).
Рис. 11. Конфигурация датчика и платы с детектируемыми элементами
Реализация малогабаритного многопозиционного сенсора накладывает свои ограничения на размеры используемых датчиков. Такие датчики обладают малой индуктивностью, величина которой может быть недостаточна для корректной работы индуктивного компаратора LDC0851. Для того чтобы получить максимальную индуктивность в заданном пространстве, в TIDA-00828 реализован трапециевидный датчик вместо обычного круглого. Дополнительно индуктивность датчика выполнена в четырех слоях с 7-ю витками на каждом слое (рисунок 13).
Рис. 12. Функциональная блок-схема 32-позиционного кругового регулятора
Рис. 13. Трапециевидная конструкция датчика, выполненного в четырех слоях
Предложенный дизайн рассчитан на работу от USB-интерфейса 5 В и регулируемого напряжения 3,3 В для питания микроконтроллера и LDC0851. И хотя представленный дизайн датчика угла поворота разрабатывался для реализации интерфейса «человек-машина», он с успехом может быть использован для применений, где необходимо измерение скорости. В данном случае следует учитывать, что максимальная измеряемая скорость будет зависеть от времени преобразования микросхемы и необходимости дополнительной передискретизации для достижения надежных показаний. Измеряемую максимальную скорость можно оценить по формуле (1):
(1)
где RPMмакс – максимально возможная измеряемая скорость вращения, tмин – время преобразования с учетом передискретизации. В предлагаемом решении с использованием LDC08051, с частотой датчика 16,73 МГц и с учетом того, что для надежной работы производится усреднение по трем значениям, максимальная измеряемая скорость составляет 2415 об/мин.
Прецизионный регулятор
Другим примером реализации датчика угла поворота является типовой проект TIDA-00508. В проекте показано, как с помощью индуктивных преобразователей Texas Instruments можно реализовать прецизионный диск управления, который позволяет определять угол поворота с точностью до 1° с разрешающей способностью 0,1° без использования дополнительных магнитов. Получаемые результаты не зависят от температуры и позволяют автоматически скорректировать качание по оси z. В качестве преобразователя индуктивности в проекте используется LDC1314 (рисунок 14). Использование индуктивного датчика позволяет реализовать бесконтактный узел управления и получить все выгоды от его использования, такие же, как и в предыдущих проектах: устойчивость к загрязнениям, надежность, отсутствие магнита и тому подобное, что позволяет использовать его в различных промышленных, автомобильных, потребительских применениях. Для реализации индуктивного датчика используется стандартная технология изготовления печатных плат, что позволяет получить недорогое решение. И хотя в примере применяется LDC1314, при необходимости вместо нее также могут быть использованы LDC1312, LDC1614, LDC1612.
Рис. 14. LDC1314 в cхеме прецизионного регулятора
Особенностью реализации прецизионного кругового регулятора является специальная конструкция сенсора и токопроводящего детектируемого объекта. Предложенная конструкция обеспечивает линейную зависимость перекрытия при повороте. Для достижения линейности измерений рисунок проводящего материала представляет собой форму, в которой ширина проводника линейно меняется в зависимости от угла (рисунок 15). При этом сам диск выполнен из стандартного материала FR4.
Рис. 15. Форма проводника для проводящего объекта
Дополнительно применение дифференциальной конструкции сенсора позволяет минимизировать нежелательное воздействие изменения температуры, точности сопряжения в пространстве и уменьшить различие между платами до 3° без дополнительной калибровки (рисунок 16). Данные об изменении частоты с LDC1314 передаются на микроконтроллер MSP430, который в данном проекте является мостом между I2C-интерфейсом LDC1314 и USB-интерфейсом. Вся обработка данных и их отображение производятся с помощью ПК. С помощью ПК также производится необходимая калибровка. Применяемый для обработки и калибровки алгоритм может быть легко перенесен в микроконтроллер для самостоятельных применений.
Рис. 16. Конструкция дифференциальных индуктивных датчиков с проводящим объектом над ним
Используемая микросхема LDC1314 является четырехканальным цифровым преобразователем индуктивности (рисунок 17). Четыре входных канала (от IN0A/IN0B до IN3A/IN3B) подсоединяются к четырем датчикам, реализованным в виде LC-контура. Выход каждого канала преобразования представлен в виде 12 бит информации о частоте LC-контура. Получение информации об измеренной частоте, а также настройка параметров преобразователя осуществляются при помощи I2C-интерфейса (рисунок 18).
Рис. 17. Функциональная блок-схема LDC1314
Рис. 18. Функциональная блок-схема прецизионного кругового регулятора
Для измерения резонансной частоты LC-контура в качестве опорного сигнала может быть использован как внутренний, так и внешний генератор.
При определении угла поворота с помощью измерения индуктивности возможно появление систематической ошибки. Величина данной ошибки зависит от точности согласования используемых катушек индуктивности, емкости, наличия механических девиаций системы и внешних металлических поверхностей. Калибровка может значительно уменьшить ошибки измерения, связанные со встроенными ошибками. В текущем проекте применяются три вида калибровки: калибровка по четырем точкам, калибровка полного поворота, автоматическая калибровка (калибровка во время работы).
Заключение
Применение цифровых преобразователей «индуктивность-код» производства компании Texas Instruments существенно упрощает процесс разработки и использования индуктивных датчиков. Широкая номенклатура имеющихся преобразователей в семействе LDC позволяет реализовать все преимущества бесконтактных индуктивных датчиков, не усложняя конструкцию и не используя дорогостоящих внешних элементов. Рассмотренные практические примеры применения показывают, что использование индуктивных датчиков позволяет реализовать надежные решения, которые являются достойной альтернативой оптическим и магнитным датчикам.
Получение технической информации, заказ образцов, заказ и доставка.
•••
Наши информационные каналы
назначение и принцип работы, устройство индуктивного датчика
Что представляет собой индуктивный датчик?
Этот датчик по своим особенностям работы относится к бесконтактному оборудованию, то есть, ему не требуется наличие физического контакта с объектом, чтобы определить его местоположение в пространстве. Индуктивный датчик обычно применяется в тех случаях, когда необходимо провести работу с металлическими объектами и предметами.
На другие материалы, соответственно, этот прибор не реагирует и пропускает их мимо своего поля деятельности. Основное направление использования этих устройств — всевозможные автоматизированные линии и системы. У них может присутствовать как замкнутый, так и разомкнутый контакт. Принцип действия у подобных устройств осуществляется за счет присутствия специальной катушки, которая создает магнитное поле, позволяющее взаимодействовать с металлами. У такой работы есть свои особенности и принципы, которые играют важную роль.
Как действует датчик?
Индуктивный датчик за счет своего внутреннего устройства имеет определенный принцип действия. В нем используется специальный генератор, который выдает определенную амплитуду колебаний. Когда в поле действия агрегата попадает объект, состоящий из металлического или ферромагнитного материала, то колебания начинают меняться, что и сигнализирует о наличии предмета. Из-за этого датчики работают только с подобными материалами и бесполезны в других случаях.
- При начале работы на конечный выключатель подается питание, что способствует образованию магнитного поля. Именно оно влияет на вихревые токи, которые, в свою очередь, меняют амплитуду колебаний у работающего генератора.
- Результат всех этих преобразований — получение выходного сигнала, который может варьироваться, в зависимости от расстояния между работающим датчиком и исследуемым предметом. Затем при помощи специального устройства аналоговый сигнал преображается в логический.
- Индуктивный датчик также нужен, чтобы распознавать положение металлических предметов. Это может играть важную роль на производстве. Если по линии следуют изделия, на которых металлические детали должны быть расположены в определенном порядке, то датчики проконтролируют правильность этого расположения. В случае обнаружения ошибки устройство подаст сигнал на конвейер, и программа предпримет дальнейшие действия для устранения проблемы.
Конструкция устройства
Индуктивный датчик положения имеет своеобразное устройство и состоит из нескольких важных узлов, которые обеспечивают полноценную работу этого агрегата.
- Важной деталью является генератор, именно он создает электромагнитное поле, которое помогает анализировать металлические предметы и определять их положение. Без этого поля работа была бы невозможной.
- Также в работе используется такой специальный элемент, как триггер Шмидта – в его задачу входит преобразование сигнала, чтобы датчики могли взаимодействовать с другими элементами в системе и передавать информацию дальше.
- Может использоваться усилитель – он нужен, чтобы получаемый сигнал достиг необходимого уровня для дальнейшей передачи.
- В работе датчика применяются индикаторы на светодиодах, они помогают контролировать работу устройства, сигнализируя о том, что оно включилось, а также лампочки могут загораться при выполнении различных настроек системы.
- Такое приспособление как компаунд защищает датчик от попадания внутрь воды и всяческих мелких частиц. Поскольку посторонние субстанции могут негативно сказаться на работе прибора и даже привести к его поломке, качественная защита является важным моментом.
- Корпус — в нем помещаются все перечисленные внутренние элементы, которые собираются в единое целое. Сам корпус монтируется в нужном месте при помощи специальных креплений, позволяющих расположить его так, как это требуется для правильной и эффективной работы на линии. Кроме того, оболочка защищает детали от механических воздействий и повреждений, которые могут быть получены таким путем. Для этого корпуса датчиков изготавливают из латуни, либо полиамида — они являются достаточно надежными материалами.
Что следует знать о работе датчика?
Индуктивный датчик положения — это устройство со своей спецификой, поэтому в описании его работы и принципа действия часто используются специализированные определения:
- Активная зона означает область, где степень воздействия магнитного поля проявляется в наибольшей степени. Она находится перед чувствительной поверхностью самого датчика, там уровень концентрации является самым высоким. Как правило, по размеру эта зона равна диаметру самого устройства.
- Номинальное расстояние переключения. Такой параметр считается теоретическим, поскольку он не учитывает производственных особенностей, режим температуры, уровень напряжения и прочие факторы.
- Рабочий зазор. Так обозначается тот диапазон параметров, который гарантирует эффективную и нормальную работу прибора без возникновения каких-либо проблем с его функционированием на производстве.
- Поправочный коэффициент. Этот момент связан с тем, из какого материала сделан металлический объект, обследуемый датчиком, поскольку в зависимости от этого может быть скорректировано значение рабочего зазора.
Принцип работы
и его применение
В настоящее время мы не можем представить автоматизацию без использования индуктивного датчика. Когда используется автоматизация для определения бесконтактного положения металлических предметов, износостойкость обязательна, будь то в производстве электроники, машиностроении, автомобилестроении, производстве пластмасс или пищевой промышленности. Во многих отраслях промышленности предлагается широкий спектр датчиков различной конструкции практически для любого применения. У некоторых датчиков есть дополнительное керамическое покрытие, чтобы их можно было сваривать.Используя эти датчики, мы можем отслеживать, автоматизировать и контролировать условия и процессы с максимальным качеством даже в суровых условиях.
Что такое индуктивный датчик?
В настоящее время индуктивный датчик является важным компонентом машин. Эти датчики являются надежными устройствами и в основном разработаны в зависимости от требований датчика приближения. Эти датчики обнаруживают токопроводящие, в противном случае металлические части, где контакт затруднен. Эти датчики используются в гигиенических и наружных применениях.
индуктивный датчик
Эти датчики могут быть спроектированы в зависимости от конкретного применения. Например, мультивольтные и высокотемпературные датчики. Эти датчики выдают подходящие сигналы для пределов и положений, которые работают как датчик импульсов, используемый для проверки задач подсчета, а также скорости вращения. Когда эти датчики используются в бесконтактной форме, они могут прослужить долго, потому что они не ориентированы на какой-либо механический износ. Кроме того, эти датчики работают в тяжелых условиях окружающей среды, таких как пыль, вибрация и влага, что делает их идеальным выбором для использования во многих отраслях промышленности.
Принцип работы
Принцип работы индуктивного датчика в основном зависит от принципа электромагнитной индукции для обнаружения или измерения объектов. Индуктивный датчик в основном включает в себя индукционную петлю, которой достаточно для обнаружения электромагнитного поля. Работа этих датчиков может осуществляться путем генерации колеблющегося электромагнитного поля, которое формируется магнитным объектом, когда он находится в движении. Движущийся объект активирует ток в индукционной петле аналогично закону индукции Фарадея.Так что изменения произойдут в электромагнитном поле. Так что это можно обнаружить по цепи датчиков. Подходящий сигнал может быть выходным, когда замечен магнитный металл.
Применение индуктивного датчика
Применение этих датчиков включает следующее.
- Эти датчики широко используются в промышленности, военной, робототехнической, железнодорожной, аэрокосмической и т. Д.
- Используется в датчиках приближения или переключателях
- Эти датчики используются для обнаружения черных металлов, таких как железо, сталь, никель и кобальт.
- Используется в медицине для МРТ (магнитно-резонансной томографии)
- Используется для сборки автомобильного кузова
- Эти датчики используются для определения положения движения и управления движением объекта.
- Используется в производстве трансформаторов и катушка
- Используется для обнаружения крышки и сломанной насадки
- Используется в датчиках трафика для обнаружения движущегося автомобиля
- Они используются для отслеживания взгляда и производства поисковой катушки
- Эти датчики используются для обнаружения наличия объекта в приложении как выбор и размещение во время проверок
- Используется в процедурах обработки
- Используется в металлодетекторах
- Используется в автоматизированной промышленности
- Они используются в концевых выключателях, обнаружении скорости и генерации импульсов
- Используются для передачи управления системой в противном случае
- Используется для измерения расстояния и положения инструмента
Таким образом, это все о индуктивности датчик ve.Основные преимущества индуктивных датчиков заключаются в том, что они подходят для различных областей применения, они легко переносятся, бесконтактные, в отличие от грязи и короткого замыкания. Вот вам вопрос, каковы недостатки индуктивного датчика?
Принципиальная схема, работа и применение
Принцип индукционного нагрева используется в производственных процессах с 1920-х годов. Как уже говорилось, необходимость — мать изобретений, во время Второй мировой войны необходимость в быстром процессе упрочнения деталей металлического двигателя привела к быстрому развитию технологии индукционного нагрева.Сегодня мы видим применение этой технологии в наших повседневных потребностях. В последнее время потребность в улучшенном контроле качества и безопасных производственных технологиях снова привлекла внимание к этой технологии. Благодаря современным передовым технологиям внедряются новые и надежные методы реализации индукционного нагрева.
Что такое индукционный нагрев?
Принцип работы процесса индукционного нагрева представляет собой комбинированный рецепт электромагнитной индукции и джоулева нагрева.Процесс индукционного нагрева — это бесконтактный процесс нагрева электропроводящего металла путем создания в нем вихревых токов с использованием принципа электромагнитной индукции. Поскольку генерируемый вихревой ток течет против удельного сопротивления металла, по принципу джоулева нагрева в металле генерируется тепло.
Индукционный нагрев
Как работает индукционный нагрев?
Знание закона Фарадея очень полезно для понимания работы индукционного нагрева. Согласно закону электромагнитной индукции Фарадея, изменение электрического поля в проводнике приводит к возникновению переменного магнитного поля вокруг него, сила которого зависит от величины приложенного электрического поля.Этот принцип работает и наоборот, когда в проводнике изменяется магнитное поле.
Итак, вышеуказанный принцип используется в процессе индукционного нагрева. Здесь твердотельный источник питания с высокочастотной частотой подается на катушку индуктивности, а нагреваемый материал помещается внутри катушки. Когда через катушку пропускают переменный ток, вокруг нее создается переменное магнитное поле в соответствии с законом Фарадея. Когда материал, помещенный внутри индуктора, попадает в диапазон этого переменного магнитного поля, в материале генерируется вихревой ток.
Теперь соблюдается принцип джоулева нагрева. В соответствии с этим при прохождении тока через материал в нем выделяется тепло. Таким образом, когда в материале возникает ток из-за индуцированного магнитного поля, протекающий ток выделяет тепло изнутри материала. Это объясняет процесс бесконтактного индукционного нагрева.
Индуктивный нагрев металлаСхема цепи индукционного нагрева
Установка, используемая для процесса индукционного нагрева, состоит из высокочастотного источника питания для подачи переменного тока в цепь.Медная катушка используется в качестве индуктора, и к ней подается ток. Нагреваемый материал помещается внутрь медного змеевика.
Типовая установка индукционного нагрева
Изменяя силу подаваемого тока, мы можем контролировать температуру нагрева. Поскольку вихревой ток, возникающий внутри материала, течет противоположно удельному электрическому сопротивлению материала, в этом процессе наблюдается точный и локальный нагрев.
Помимо вихревых токов, в магнитных частях также выделяется тепло из-за гистерезиса.Электрическое сопротивление, создаваемое магнитным материалом по отношению к изменяющемуся магнитному полю внутри индуктора, вызывает внутреннее трение. Это внутреннее трение создает тепло.
Поскольку процесс индукционного нагрева является процессом бесконтактного нагрева, нагреваемый материал может находиться вдали от источника питания или погружаться в жидкость, или в любую газообразную среду, или в вакууме. Этот тип процесса нагрева не требует каких-либо продуктов сгорания.
Факторы, которые необходимо учитывать при проектировании системы индукционного нагрева
Есть некоторые факторы, которые следует учитывать при проектировании системы индукционного нагрева для любого типа применения.
- Обычно индукционный нагрев используется для металлов и токопроводящих материалов. Непроводящий материал можно нагревать напрямую.
- При нанесении на магнитные материалы тепло генерируется как вихревыми токами, так и эффектом гистерезиса магнитных материалов.
- Маленькие и тонкие материалы нагреваются быстрее, чем большие и толстые.
- Чем выше частота переменного тока, тем меньше глубина проплавления.
- Материалы с более высоким сопротивлением быстро нагреваются.
- Индуктор, в который должен быть помещен нагревательный материал, должен позволять легко вводить и удалять материал.
- При расчете мощности источника питания необходимо учитывать удельную теплоемкость нагреваемого материала, массу материала и требуемое превышение температуры.
- Потери тепла из-за теплопроводности, конвекции и излучения также должны приниматься во внимание при выборе мощности источника питания.
Формула для индукционного нагрева
Глубина, на которую проникает вихревой ток в материал, определяется частотой индукционного тока.Для токоведущих слоев эффективная глубина может быть рассчитана как
D = 5000 √ρ / µf
Здесь d означает глубину (см), относительная магнитная проницаемость материала обозначена как µ, ρ — удельное сопротивление материала в Ом-см, f указывает частоту переменного тока в Гц.
Конструкция змеевика индукционного нагрева
Катушка, используемая в качестве индуктора, к которому подается питание, бывает различных форм.Индуцированный ток в материале пропорционален количеству витков в катушке. Таким образом, для эффективности и действенности индукционного нагрева важна конструкция катушки.
Обычно индукционные катушки представляют собой медные проводники с водяным охлаждением. В зависимости от наших приложений используются катушки различной формы. Чаще всего используется многооборотная спиральная катушка. Для этой катушки ширина диаграммы нагрева определяется количеством витков в катушке. Однооборотные катушки полезны в тех случаях, когда требуется нагрев узкой полосы заготовки или кончика материала.
Многопозиционный спиральный змеевик используется для нагрева более чем одной детали. Блинный змеевик используется, когда требуется нагреть только одну сторону материала. Внутренний змеевик используется для нагрева внутренних отверстий.
Области применения индукционного нагрева
- Целевой нагрев для поверхностного нагрева, плавления, пайки возможен с помощью процесса индукционного нагрева.
- Кроме металлов, индукционным нагревом возможен нагрев жидких и газовых проводников.
- Для нагрева кремния в полупроводниковой промышленности используется принцип индукционного нагрева.
- Этот процесс используется в индукционных печах для нагрева металла до температуры плавления.
- Поскольку это бесконтактный процесс нагрева, вакуумные печи используют этот процесс для производства специальной стали и сплавов, которые окисляются при нагревании в присутствии кислорода.
- Индукционный нагрев используется для сварки металлов и иногда пластиков, когда они легированы ферромагнитной керамикой.
- Индукционные плиты, используемые на кухне, работают по принципу индукционного нагрева.
- Для пайки твердым припоем к валу используется процесс индукционного нагрева.
- Для герметизации крышек бутылок и фармацевтических препаратов с защитой от несанкционированного доступа используется процесс индукционного нагрева.
- Машина для моделирования впрыска пластика использует индукционный нагрев для повышения энергоэффективности впрыска.
Для обрабатывающей промышленности индукционный нагрев обеспечивает мощный пакет стабильности, скорости и контроля.Это аккуратный, быстрый и экологически чистый процесс нагрева. Потери тепла, наблюдаемые при индукционном нагреве, могут быть решены с помощью закона Ленца. Этот закон показал способ продуктивного использования тепловых потерь, возникающих в процессе индукционного нагрева. Что из применения индукционного нагрева вас поразило?
Принцип работы, использование и области применения
В робототехнике датчик является ключевым элементом, который играет важную роль, которую нельзя игнорировать. Они очень важны из-за их функции, например, они предоставляют интерфейс для связи с окружающей средой.По этой причине они доступны в разных диапазонах для разных приложений. Есть несколько часто используемых датчиков, которые включают датчик тока, датчик напряжения, спидометр, датчик освещенности и, наконец, датчик IMU. В этой статье обсуждается обзор датчика IMU, который известен как инерциальный измерительный блок.
Что такое датчик IMU?
Датчик IMU — это электронное устройство, используемое для расчета и сообщения точной силы тела, угловой скорости, а также направления тела, что может быть достигнуто с помощью сочетания 3 датчиков, таких как гироскоп, магнитометр и акселерометр.Эти датчики обычно используются для планирования летательных аппаратов, включая беспилотные летательные аппараты (беспилотные летательные аппараты), а также нескольких других, а также космических аппаратов, включая посадочные модули и спутники. Современные разработки позволяют производить GPS-устройства на базе IMU.
imu-sensor
Эти датчики позволяют приемнику GPS работать, когда сигналы GPS недоступны, например, в зданиях, туннелях или при наличии электронных помех. WIMU — это не что иное, как беспроводной датчик IMU.
Принцип работы
Работа сенсорного блока IMU может выполняться по линейному ускорению с помощью одного или дополнительных акселерометров, а скорость вращения может быть определена с помощью одного или дополнительных гироскопов.Некоторые также содержат магнитометр, который можно использовать в качестве справочного материала. Этот датчик включает в себя некоторые обычные конфигурации, которые включают гироскоп, один акселерометр и магнитометр для каждой оси, используемой для каждой из трех осей транспортного средства, таких как крен, рыскание и тангаж.
Датчик IMU используется для?
Он измеряет силу, магнитное поле и угловую скорость. Эти датчики включают 3-осевой акселерометр и гироскоп. Таким образом, это будет измеряться как 6-осевой датчик IMU. Они также могут включать дополнительный 3-осевой магнитометр, так что его можно рассматривать как 9-осевой IMU.
Официально название IMU — это просто датчик; однако они часто связаны с программным обеспечением, таким как Sensor Fusion. Этот датчик объединяет данные от множества датчиков для определения направления и ориентации. Обычно этот датчик может использоваться для обозначения сочетания датчика и программного обеспечения для объединения датчиков, которое также может называться системой отсчета направления ориентации (AHRS).
Приложения
Применение датчика MIU включает в себя следующее.
- Этот датчик используется для определения направления в системе GPS.
- Этот датчик используется для отслеживания движения внутри пользовательской электроники, такой как сотовые телефоны, пульты управления видеоигрой.
- Этот датчик используется в промышленности для определения и расчета местоположения оборудования, например антенн.
- Эти датчики помогают самолету маневрировать без пилота или с ним.
- IMU используются в развлекательных системах полетов и в воздушном пространстве потребителей, чтобы добавить удобства в дополнение к контактам в их пультах.
- В будущем их можно будет использовать в GPS, RF, LiDAR, что позволит точно определять местонахождение граждан, оборудования и транспортных средств внутри и снаружи помещений.
Таким образом, это все о датчике IMU, который можно использовать для расчета магнитных полей, угловой скорости и ускорения путем объединения с программным обеспечением для объединения датчиков. Этот датчик может использоваться для определения курса, движения и ориентации. Они применимы как в бытовой электронике, так и в промышленности. Вот вам вопрос, каковы преимущества датчика IMU?
Основной принцип работы индуктивного датчика приближения
Вы когда-нибудь задумывались, как индуктивный датчик приближения может обнаруживать металлическую цель? Хотя лежащая в основе электротехника сложна, основной принцип работы понять нетрудно.
В основе индуктивного датчика приближения («прокс», «датчик» или «прокс-датчик» для краткости) лежит электронный генератор, состоящий из индукционной катушки, состоящей из множества витков очень тонкой медной проволоки, конденсатора для хранения электрического заряда, и источник энергии для электрического возбуждения. Размер индукционной катушки и конденсатора согласован для создания самоподдерживающихся синусоидальных колебаний с фиксированной частотой. Катушка и конденсатор действуют как две электрические пружины с грузом, подвешенным между ними, постоянно толкая электроны вперед и назад друг к другу.Электрическая энергия подается в цепь, чтобы инициировать и поддерживать колебания. Без поддержания энергии колебания исчезли бы из-за небольших потерь мощности из-за электрического сопротивления тонкой медной проволоки в катушке и других паразитных потерь.
Колебание создает электромагнитное поле перед датчиком, так как катушка расположена прямо за «лицевой стороной» датчика. Техническое название лицевой панели датчика — «активная поверхность».
Когда кусок проводящего металла входит в зону, ограниченную границами электромагнитного поля, часть энергии колебаний передается металлу цели. Эта переданная энергия проявляется в виде крошечных циркулирующих электрических токов, называемых вихревыми токами. Вот почему индуктивные датчики иногда называют вихретоковыми датчиками.
Протекающие вихревые токи сталкиваются с электрическим сопротивлением, пытаясь циркулировать. Это создает небольшую потерю мощности в виде тепла (как маленький электрический нагреватель).Потери мощности не полностью компенсируются внутренним источником энергии датчика, поэтому амплитуда (уровень или интенсивность) колебаний датчика уменьшается. В конце концов, колебания уменьшаются до такой степени, что другая внутренняя цепь, называемая триггером Шмитта, обнаруживает, что уровень упал ниже заранее определенного порога. Этот порог — это уровень, при котором присутствие металлической цели точно подтверждается. При обнаружении цели триггером Шмитта включается выход датчика.
На короткой анимации справа показано влияние металлической цели на колеблющееся магнитное поле датчика. Когда вы видите, что кабель, выходящий из датчика, становится красным, это означает, что обнаружен металл и датчик был включен. Когда цель уходит, вы можете видеть, что колебания возвращаются к своему максимальному уровню, и выход датчика снова отключается.
Хотите узнать больше об основных принципах работы индуктивных датчиков приближения? Вот короткое видео на YouTube, посвященное основам:
Нравится:
Нравится Загрузка…
Генри Менке
У меня есть электротехническое образование, которое дает мне прочную техническую основу для моей нынешней должности директора по маркетингу продукции.
Бесконтактные выключатели Принцип работы
Датчик приближения — это датчик, определяющий приближение (близость) некоторого объекта. По определению, эти переключатели являются бесконтактными датчиками, использующими магнитные, электрические или оптические средства для определения близости объектов.
Бесконтактный переключатель будет находиться в «нормальном» состоянии, когда он находится на расстоянии от любого обнаруживаемого объекта.
Будучи бесконтактными по своей природе, бесконтактные переключатели часто используются вместо концевых выключателей прямого контакта с той же целью определения положения детали машины, с тем преимуществом, что они никогда не изнашиваются со временем из-за повторяющегося физического контакта.
Большинство бесконтактных переключателей имеют активную конструкцию. То есть они включают в себя электронную схему с питанием, которая определяет близость объекта. Индуктивные датчики приближения обнаруживают присутствие металлических предметов с помощью высокочастотного магнитного поля.Емкостные датчики приближения обнаруживают присутствие неметаллических объектов с помощью высокочастотного электрического поля. Оптические бесконтактные переключатели обнаруживают прерывание светового луча объектом. Ультразвуковые бесконтактные переключатели определяют присутствие плотной материи по отражению звуковых волн.
Обозначение бесконтактного переключателя
Обозначение на принципиальной схеме бесконтактного переключателя с механическими контактами такое же, как и для механического концевого выключателя, за исключением того, что символ переключателя заключен в ромбовидную форму, указывающую на включенное (активное) устройство:
Однако многие датчики приближения не имеют выходов «сухой контакт».Вместо этого их выходные элементы представляют собой транзисторы, настроенные либо на источник тока, либо на сток. Термины «источник» и «опускание» лучше всего понять, визуализируя электрический ток в направлении обычного потока, а не потока электронов.
На следующих схематических диаграммах сравниваются два режима работы переключателя. Красные стрелки показывают направление тока (условное обозначение потока). В обоих примерах нагрузка, приводимая в действие каждым бесконтактным переключателем, представляет собой светодиод (LED):
Принцип работы:
Бесконтактный переключательсостоит из схемы датчика и схемы управления.Цепь датчика используется для обнаружения любых находящихся поблизости объектов. Схема датчика отправляет выходной сигнал высокого уровня на схему транзисторного драйвера, когда какой-либо объект обнаруживается рядом со схемой датчика. Схема драйвера на основе транзисторов может использовать транзисторы NPN или PNP, и это зависит от используемого приложения.
Когда сигнал получен от цепи датчика, транзистор будет включен, а выход будет включен. Когда объект удаляется от цепи датчика, выход датчика выключен, поэтому транзистор выключен, и выход будет выключен.
Примечание: Схема датчика может содержать LC-резонансный генератор или схему на основе взаимной индукции. Резонансный генератор LC непрерывно генерирует заданные резонансные колебания. всякий раз, когда рядом с датчиками находится какой-либо металлический объект, колебания могут варьироваться, и это зависит от свойств объекта. Это изменение колебаний будет обнаружено и выдаст на выходе либо высокий, либо низкий уровень, ничего, кроме обнаруженного объекта, или нет.
Бесконтактный переключатель NPN Тип
Примечание: Красная точка в анимации обозначает поток текущего пути.
Бесконтактный переключатель PNP, тип
Обычное цветовое обозначение электронных бесконтактных переключателей — коричневый для источника питания + V, синий для заземления (- полюс источника питания) и черный для коммутируемого выходного сигнала. Это соглашение характерно как для бесконтактных переключателей, так и для источников питания.
Электронный переключатель, предназначенный для отвода тока через сигнальный провод, также называется переключателем NPN из-за типа транзистора, используемого на его выходе.И наоборот, электронный переключатель, предназначенный для подачи тока через сигнальный провод, может называться переключателем PNP.
Ключом к пониманию этих меток является понимание того, что вывод эмиттера выходного транзистора всегда подключен к шине источника питания. Для понижающего переключателя это означает, что эмиттер должен подключаться к отрицательной шине, что требует наличия NPN-транзистора для переключения. Для переключателя источника это означает, что эмиттер должен подключаться к положительной шине, и в этом случае будет достаточно только транзистора PNP.
Принцип работы, применение и ограничения ультразвуковых датчиков
Рисунок 1: Ультразвуковой датчик HC SR04. (Источник: DigikeyУльтразвуковой датчик (или преобразователь) работает по тем же принципам, что и радиолокационная система. Ультразвуковой датчик может преобразовывать электрическую энергию в акустические волны и наоборот. Сигнал акустической волны — это ультразвуковая волна, распространяющаяся с частотой выше 18 кГц. • Знаменитый ультразвуковой датчик HC SR04 генерирует ультразвуковые волны с частотой 40 кГц.
Обычно микроконтроллер используется для связи с ультразвуковым датчиком. Чтобы начать измерение расстояния, микроконтроллер отправляет сигнал запуска на ультразвуковой датчик. Рабочий цикл этого триггерного сигнала составляет 10 мкс для ультразвукового датчика HC-SR04. При срабатывании ультразвуковой датчик генерирует восемь акустических (ультразвуковых) волн и запускает счетчик времени. Как только будет получен отраженный (эхо) сигнал, таймер останавливается. Выходной сигнал ультразвукового датчика представляет собой мощный импульс той же длительности, что и разница во времени между переданными ультразвуковыми импульсами и принятым эхо-сигналом.
Рисунок 2: Представление триггерного сигнала, акустических всплесков, отраженного сигнала и выхода эхо-вывода. (Источник: Руководство пользователя HC-SR04)Микроконтроллер интерпретирует сигнал времени на расстояние, используя следующие функции:
Теоретически расстояние можно рассчитать с помощью формулы измерения TRD (время / скорость / расстояние). Поскольку рассчитанное расстояние — это расстояние, пройденное от ультразвукового преобразователя до объекта и обратно до преобразователя, это двустороннее путешествие.Разделив это расстояние на 2, вы можете определить фактическое расстояние от преобразователя до объекта. Ультразвуковые волны распространяются со скоростью звука (343 м / с при 20 ° C). Расстояние между объектом и датчиком составляет половину расстояния, пройденного звуковой волной. [Iv] Следующее уравнение рассчитывает расстояние до объекта, помещенного перед ультразвуковым датчиком:
Приложения
Ультразвуковые датчики используются во многих областях техники.«Бесконтактное» измерение расстояния очень полезно в автоматизации, робототехнике и приборостроении. Ниже мы исследуем области применения ультразвуковых датчиков:
Ультразвуковые анемометры
Рис. 3. Ультразвуковой анемометр 2D обнаруживает горизонтальную составляющую скорости и направления ветра (Источник: Biral).Метеостанции обычно используют анемометры, поскольку они эффективно определяют скорость и направление ветра. 2D-анемометры могут измерять только горизонтальную составляющую скорости и направления ветра, тогда как 3D-анемометры могут измерять также вертикальную составляющую ветра.
Помимо измерения скорости и направления ветра, ультразвуковые анемометры также могут измерять температуру, потому что скорость ультразвуковых звуковых волн зависит от изменений температуры, при этом сохраняя независимость от изменений давления. Температура рассчитывается путем измерения изменений скорости ультразвукового звука.
Ультразвуковой анемометр более долговечен по сравнению с чашечным анемометром и крыльчатым анемометром, поскольку у него нет движущихся частей и он работает с использованием ультразвуковых звуковых волн.[vi]
Рис. 4. Ультразвуковой анемометр 3D измеряет как горизонтальные, так и вертикальные компоненты скорости и направления ветра. (Источник: Biral)Датчик уровня моря
Датчик уровня моря используется для контроля уровня моря. Он также обнаруживает приливы, штормовые нагоны, цунами, волны и другие прибрежные процессы. [vii] Приливомер может использовать ультразвуковой датчик для определения уровня воды в реальном времени. Датчик часто связан с онлайн-базой данных, в которой ведется запись, и в случае рискованной ситуации система может вызвать тревогу.
Уровень в резервуаре
Измерение уровня жидкости в резервуаре аналогично манометру. Однако в этом случае текучая среда может быть чистой водой, коррозионно-активным химическим веществом или легковоспламеняющейся жидкостью. В отличие от оптических датчиков и поплавковых выключателей, ультразвуковые датчики менее подвержены коррозии, поскольку они не контактируют с жидкостью.
Функционален при солнечном свете
Солнечный свет на поверхности Земли состоит примерно на 52–55% из инфракрасного света. [Ix] Если инфракрасный датчик обнаруживает объект с использованием инфракрасного света, процесс нарушается из-за интерференции инфракрасного света, присутствующего в солнечном свете.Однако на ультразвуковые датчики не влияет инфракрасный спектр солнечного света.
Системы веб-направляющих
Системы управления полотном позиционируют плоские материалы (например, газету, пластиковую пленку) и широко используют ультразвуковые датчики. По словам Максесса, «в 1939 году Ирвин Файф изобрел первое веб-руководство в своем гараже в Оклахома-Сити, штат Оклахома, решив задачу владельца газеты по поддержанию выравнивания бумаги в его высокоскоростной газетной машине». [X] Система веб-направляющих использует бесконтактный датчик для обнаружения и отслеживания объектов на нескольких этапах.Цель состоит в том, чтобы обеспечить правильное расположение материала. Если материал движется с нарушением выравнивания, система механически помещает его обратно на рабочий тракт машины. Ультразвуковые датчики подходят для систем управления полотном, поскольку этот процесс требует бесконтактного, высокоскоростного и эффективного функционирования.
БПЛА навигационный
Рисунок 5: Ультразвуковой датчик, измеряющий высоту во время полета дрона. (Источник: RadioLink)Беспилотные летательные аппараты (БПЛА) или дроны обычно используют ультразвуковые датчики для наблюдения за любыми объектами на пути и удалении от земли.
Автономная функция определения безопасных расстояний позволяет самолету избегать столкновений. А поскольку траектория полета изменяется мгновенно, ультразвуковое определение расстояний может предотвратить падение дрона.
Рис. 6. Ультразвуковой датчик, измеряющий расстояние от объекта во время полета дрона. (Источник: RadioLink)Ограничения ультразвуковых датчиков
Ультразвуковые датчики, такие как HC-SR04, могут эффективно измерять расстояния до 400 см с небольшим допуском в 3 мм.[xiii] Однако, если целевой объект расположен так, что ультразвуковой сигнал отклоняется, а не отражается обратно в ультразвуковой датчик, вычисленное расстояние может быть неверным. В некоторых случаях целевой объект настолько мал, что отраженный ультразвуковой сигнал недостаточен для обнаружения, и расстояние не может быть правильно измерено.
Кроме того, такие предметы, как ткань и ковер, могут поглощать звуковые сигналы. Если сигнал поглощается концом целевого объекта, он не может отражаться обратно на датчик, и, следовательно, расстояние не может быть измерено.
Рисунок 7: Изображение отклонения ультразвукового сигнала из-за положения целевого объекта, что приводит к ошибке. (Источник: Macduino)Высокая чувствительность ультразвуковых датчиков делает их эффективными, но эта чувствительность также может вызывать проблемы. Ультразвуковые датчики могут обнаруживать ложные сигналы, исходящие от радиоволн, нарушенных системой кондиционирования воздуха, и импульсы, исходящие, например, от потолочного вентилятора.
Ультразвуковые датчики могут обнаруживать объекты, находящиеся в пределах их диапазона, но не могут различать разные формы и размеры.Однако это ограничение можно преодолеть, используя два датчика вместо одного. Оба датчика можно установить на некотором расстоянии друг от друга, либо они могут быть рядом. Наблюдая за перекрывающейся заштрихованной областью, можно лучше понять форму и размер целевого объекта.
Рисунок 8: Изображение перекрывающейся области при размещении двух ультразвуковых датчиков на расстоянии или рядом друг с другом. (Источник: msu.edu)Артикул:
https: // www.mouser.com/ds/2/813/HCSR04-1022824.pdf[ii] https://www.mpja.com/download/hc-sr04_ultrasonic_module_user_guidejohn.pdf
https://www.mpja.com/download/hc- sr04_ultrasonic_module_user_guidejohn.pdf
https://www.teachengineering.org/activities/view/nyu_soundwaves_activity1
https://www.arrow.com/en/research-and-events/articles/ultrasonic-sensors-how-they- и как использовать их с arduino
https://en.wikipedia.org/wiki/Anemometer
Ультразвуковые датчики ToughSonic® помогают предупреждать о цунами
Принципы термической экологии: температура, энергия и жизнь; Кларк, Эндрю.2017 г.
http://www.maxcessintl.com/fife
https://en.wikipedia.org/wiki/Web-guiding_systems
https://www.maxbotix.com/uav-ultrasonic-sensors.htm
https: //www.mouser.com/ds/2/813/HCSR04-1022824.pdf
http://cmra.rec.ri.cmu.edu/content/electronics/boe/ultrasonic_sensor/1.html
https: // www.egr.msu.edu/classes/ece480/capstone/fall09/group05/docs/ece480_dt5_application_note_nkelly.pdf
https://www.egr.msu.edu/classes/ece480/capstone/ece480/capstone/docs/docs/docs/docs/docs/docs/docs/docs/docs/docs/docs/docs/group05/docs_docs_d05pdf