Компания Ford внедрит адаптивное рулевое колесо в 2015 году — ДРАЙВ
Необычный узел был разработан Фордом в кооперации с компанией Takata.
Переменное передаточное отношение в рулевом механизме облегчает управление автомобилем на малой скорости, но не нервирует водителя излишней резкостью на шоссейных скоростях. В отличие от простых систем с переменным шагом зубьев рейки, в которых передаточное число меняется только в зависимости от угла поворота баранки, аналогичная коррекция в зависимости от скорости требует куда более сложного механизма. И такие серийные системы выпускаются уже целое десятилетие. А вот изюминка свежей фордовской разработки заключается в том, что адаптивный механизм тут размещён непосредственно в рулевом колесе.
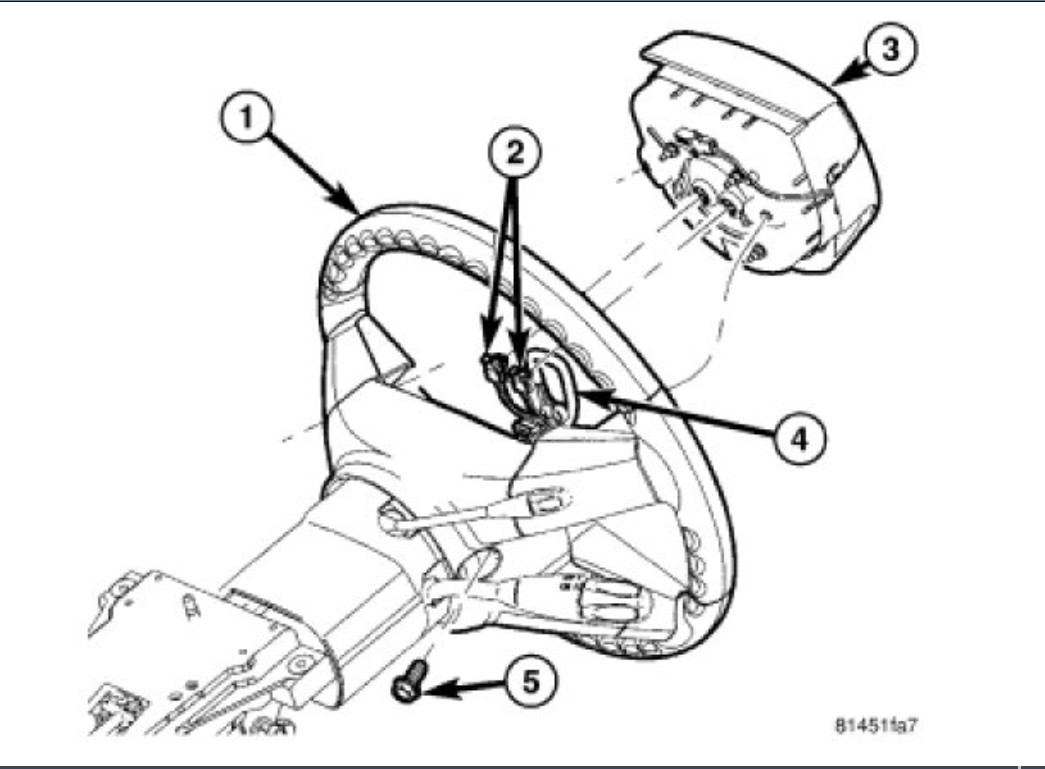
В системе Adaptive Steering небольшой электромотор, спрятанный в баранке, дополнительно подкручивает рулевой вал в нужную сторону при помощи червячной передачи.
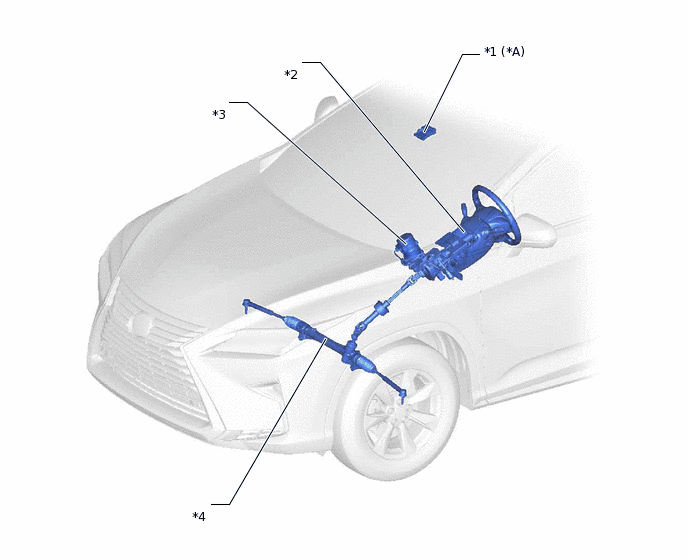
Поскольку установка системы Adaptive Steering не требует изменений в первоначальном рулевом механизме, а только лишь замены баранки, компания Ford намеревается довольно быстро, в течение следующего года, внедрить новый механизм сразу на нескольких моделях. На каких именно, американцы не говорят, рассказывая, что устройство пригодно для установки на машины разных классов.
С новой системой водителю не нужно перехватывать рулевое колесо, выполняя упражнение «Змейка». А вот на большой скорости такая резкость была бы излишней, так что рулевой механизм переходит в нормальный режим с исходным передаточным отношением, заданным параметрами рулевой рейки.
История
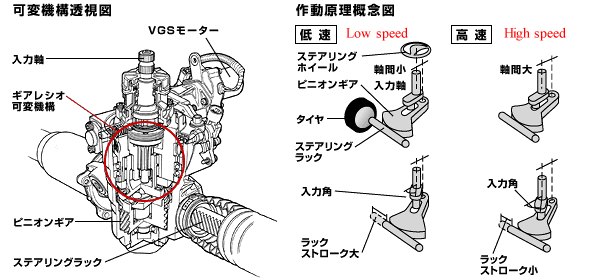
Первый в мире серийный рулевой механизм с изменяемым передаточным отношением внедрила компания Honda на родстере S2000 Type V в 2000 году. Узел VGS (Variable Gear ratio Steering) менял передаточное число в зависимости не только от угла поворота баранки, но и от скорости автомобиля. Наиболее острым руль был на малых скоростях, а на высоких снижал чувствительность. При парковке руль приходилось вращать всего на 1,4 оборота от упора до упора. Такая версия родстера продавалась только в Японии. От обычных S2000 её отличали также перенастроенная подвеска и специально разработанный дифференциал повышенного трения. Визуально Type V можно было отличить по оригинальному рулевому колесу и шильдику VGS сзади.
В родстере S2000 Type V электромотор сдвигал ось рулевого вала по отношению к оси ведущей шестерни, входившей в зацепление с рулевой рейкой. В шестерне был сделан вырез, куда попадал штифт на рулевом валу. При максимальном сближении двух осей управление делалось острее, а при их удалении друг от друга рейка смещалась заметно медленнее.
При максимальном сближении двух осей управление делалось острее, а при их удалении друг от друга рейка смещалась заметно медленнее.
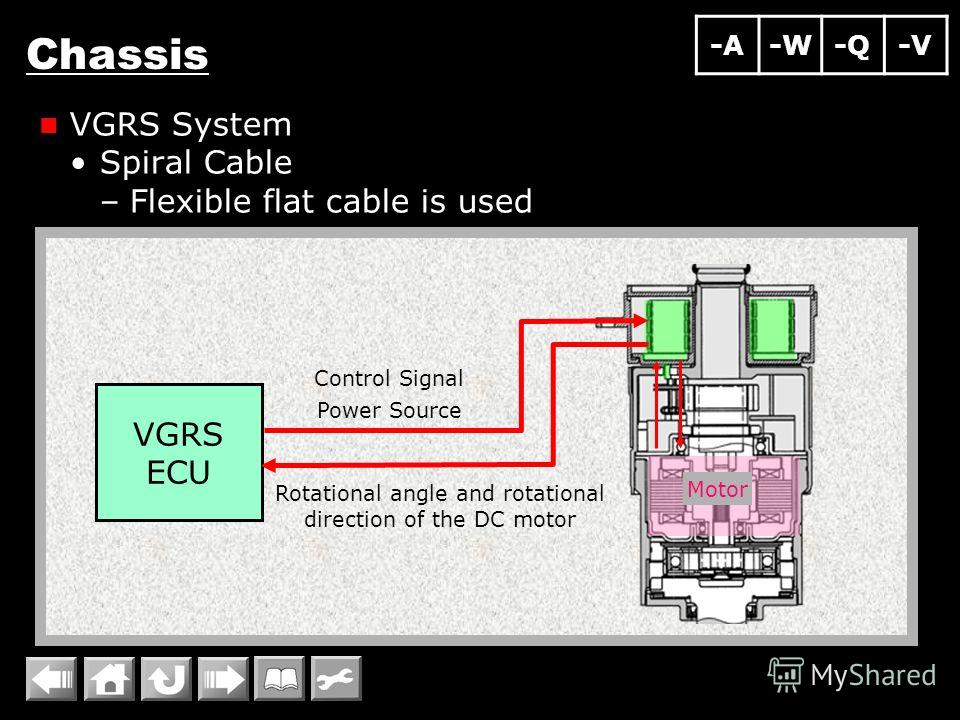
 Последний деформировал эластичное стальное колесо со 100 зубьями, соединённое с выходным валом. Оно обкатывалось по внутренней поверхности статора и немного поворачивало выходной рулевой вал по отношению к рулевому колесу, играя на опережение или отставание. Позже система VGRS перешла на некоторые другие модели Лексуса, в частности GS. Аварийный блокирующий механизм, напрямую соединявший выходной вал и баранку, использовался при сбое в управляющей системе.
Последний деформировал эластичное стальное колесо со 100 зубьями, соединённое с выходным валом. Оно обкатывалось по внутренней поверхности статора и немного поворачивало выходной рулевой вал по отношению к рулевому колесу, играя на опережение или отставание. Позже система VGRS перешла на некоторые другие модели Лексуса, в частности GS. Аварийный блокирующий механизм, напрямую соединявший выходной вал и баранку, использовался при сбое в управляющей системе.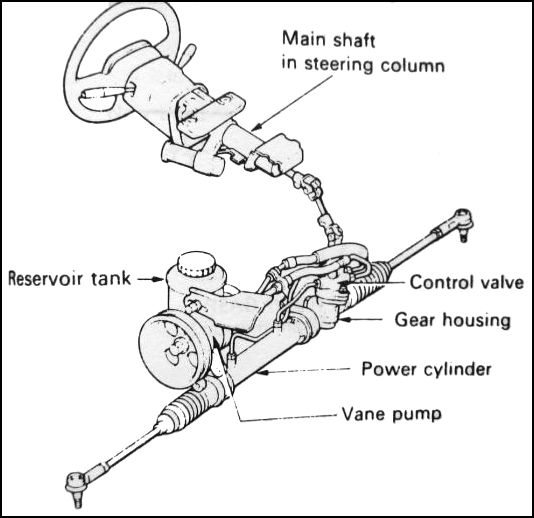 Передаточное отношение здесь фактически может быть любым, произвольно программируемым в зависимости от ситуации. Лишь при сбое электроники срабатывает аварийное сцепление, восстанавливающее механическую связь руля и рулевой рейки.
Передаточное отношение здесь фактически может быть любым, произвольно программируемым в зависимости от ситуации. Лишь при сбое электроники срабатывает аварийное сцепление, восстанавливающее механическую связь руля и рулевой рейки.
Замена рулевого механизма (ZF)
Замена рулевого механизма (TRW)
| Рулевое управление Усилитель рулевого управления Неисправности рулевого управления Разъёмы проводов усилителя руля Рулевой механизм Чехлы рулевого механизма Люфт рулевого колеса Проверка усилия на руле Прокачка усилителя руля Проверка ШРУСов Герметичность гидроусилителя Жидкость гидроусилителя Прокачка гидроусилителя Рулевая колонка Кожух рулевой колонки Блок рулевой колонки Наконечник рулевой тяги Рулевая тяга Трубопровод гидросистемы рулевого управления Моменты затяжки |

 23).
23).




 29).
29).

| Размеры | |
| Количество мест | 3 |
| Количество рядов сидений | 1 |
| Снаряженная масса автомобиля | 1080 кг |
| Допустимая полная масса | 1845 кг |
| Длина | 4360 мм |
| Ширина | 1670 мм |
| Высота | 1775 мм |
| Колесная база | 2230 мм |
| Длина задней оси, мм | 1370 |
| Длина передней оси, мм | 1425 |
| Диаметр разворота | 9 м |
| Максимальная грузоподъёмность | 600 |
| Объем топливного бака | 55 л |
| Размеры кровати | — |
| Двигатель / Коробка передач / Рулевое управление | |
| Модель двигателя | 5K |
| Объем двигателя | 1500 см³ |
| Количество цилиндров | 4 |
| Топливо | Бензин АИ-92, АИ-95 |
| Расположение двигателя | Переднее |
| Механизм изменения объёма цилиндров | — |
| Тип КПП | Механическая |
| Количество передач | 5 |
| Блокировка центрального дифференциала | — |
| Дифференциал повышенного трения (LSD) | — |
| Тип рулевого управления | Шестернярейка |
| Расположение руля | Правый руль |
| Гидроусилитель руля | + |
| Подвеска / Ходовая часть / Тормозная система | |
| Тип передней подвески | Рычажная |
| Тип задней подвески | Зависимая рессорная |
| Заниженная подвеска | — |
| Пневматическая подвеска | — |
| Спортивная подвеска | — |
| Передние тормоза | Дисковые вентилируемые |
| Задние тормоза | Дисковые |
| Размер шин | 165R13-6PRLT |
| Алюминиевые колесные диски | — |
| Диски из магниевого сплава | — |
| Самонесущие шины | — |
| Экстерьер и внешнее оснащение | |
| Омыватели передних фар | — |
| Зеркала с функцией автоподстройки на заднем ходу | — |
| Электропривод багажника | — |
| Хардтоп | — |
| Т-образная крыша | — |
| Скользящая дверь с одной стороны | — |
| Скользящие двери с обеих сторон | + |
| Скользящая дверь с электроприводом с одной стороны | — |
| Скользящие двери с электроприводом с обеих сторон | — |
| Тарга | — |
| Люк | — |
| Большой люк | — |
| Рейлинги | — |
| Передний спойлер | — |
| Задний спойлер | — |
| Внутреннее оснащение | |
| Кнопка запуска двигателя | — |
| Ключ ДУ (дистанционный ключ) | — |
| Система старт-стоп | — |
| Обогрев рулевого колеса | — |
| Электрические стеклоподъемники | — |
| Спортивные сиденья | — |
| Регулировка высоты сиденья | — |
| Память расположения сиденья | — |
| Электроподогрев передних сидений | — |
| Электропривод передних сидений | — |
| Электропривод водительского сиденья | — |
| Полностью раскладывающиеся сиденья | — |
| Убирающиеся сиденья | — |
| Доводчик двери | — |
| Подогрев задних сидений | — |
| Электропривод третьего ряда сидений | — |
| Проход между водительским и пассажирским сиденьями | — |
| Проход между сиденьями 2го ряда | — |
| Встроенное детское кресло | — |
| Оттоманка | — |
| Разъем электропитания | — |
| Датчики дождя | — |
| Динамики | + |
| Передний диван | — |
| Кожаные сиденья | — |
| Водоотталкивающая обивка | — |
| Ящик в багажнике | — |
| Кондиционер | — |
| Поглотитель запахов | — |
| Очиститель воздуха | — |
| Увлажнитель | — |
| Антибактериальная обработка | — |
| Салонный фильтр | — |
| Остекление с защитой от ультрафиолета | — |
| Расположение селектора передач | На рулевой колонке |
| Заводская тонировка | — |
| Электронные системы помощи водителю | |
| Круиз-контроль | — |
| Радарный круиз-контроль (ACCS) | — |
| Система автоматической оплаты платных дорог (ETC) | — |
| Система предотвращения столкновения | — |
| Система предотвращения выезда из полосы движения (LKA) | — |
| Система ночного видения | — |
| Система электронного контроля устойчивости (ESP) | — |
| Антиблокировочная система (ABS) | — |
| Антипробуксовочная система (TCS) | — |
| Вспомогательная система торможения (BAS) | — |
| Система помощи при спуске с горы (DAC) | — |
| Система полного привода SH-4WD | — |
| Система 4WS | — |
| Active Yaw Control (AYC) | — |
| Изменение передаточного отношения руля (VGS/VGRS) | — |
коробка передач для изменения передаточного отношения без разрыва потока мощности — патент РФ 2063565
Использование в машиностроении: коробку передач можно использовать в трансмиссии транспортных средств, станков и различных передач в которых необходимо изменить режим работы механизма или машины под нагрузкой.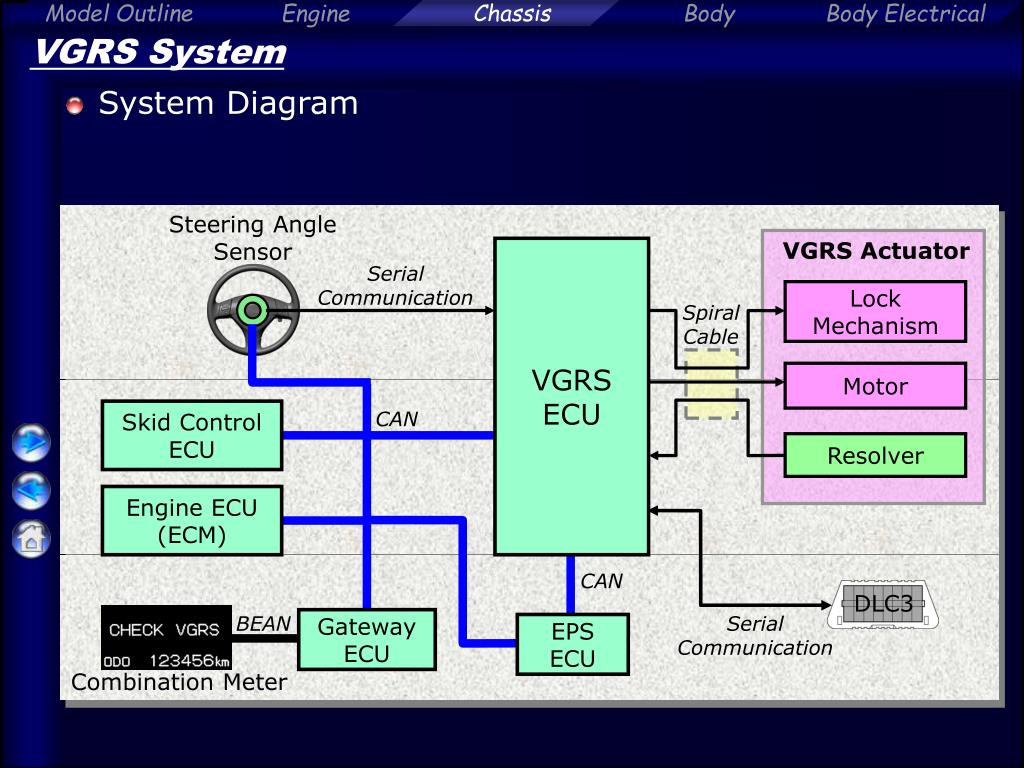 Это достигается путем применения бочкообразных элементов, расположенных между коническими шестернями каждой ступени и нарезанными одной левозаходной впадины или зубьев на соответствующих, бочкообразных элементах ведущего, ведомого и промежуточного блоков шестерен, являющихся продолжением впадины или зуба конической шестерни. Обкатывание бочкообразных элементов друг относительно друга осуществляется одновременно с осевым перемещением ведущего и ведомого блоков противоположных направлениях и углового отклонения промежуточного блока шестерен. 2 з.п. ф-лы, 6 ил.
Рисунок 1, Рисунок 2, Рисунок 3, Рисунок 4, Рисунок 5, Рисунок 6
Это достигается путем применения бочкообразных элементов, расположенных между коническими шестернями каждой ступени и нарезанными одной левозаходной впадины или зубьев на соответствующих, бочкообразных элементах ведущего, ведомого и промежуточного блоков шестерен, являющихся продолжением впадины или зуба конической шестерни. Обкатывание бочкообразных элементов друг относительно друга осуществляется одновременно с осевым перемещением ведущего и ведомого блоков противоположных направлениях и углового отклонения промежуточного блока шестерен. 2 з.п. ф-лы, 6 ил.
Рисунок 1, Рисунок 2, Рисунок 3, Рисунок 4, Рисунок 5, Рисунок 6Формула изобретения
1. Коробка передач для изменения передаточного отношения без разрыва потока мощности, содержащая корпус, ведущий, промежуточный и ведомый валы с установленными на них шестернями разного диаметра, отличающаяся тем, что она снабжена установленными с возможностью продольного перемещения на ведущем и ведомом валах шестернями, жестко соединенными с последними бочкообразными элементами с разными диаметрами оснований, упомянутые шестерни выполнены коническими со спиралевидными зубьями, промежуточный вал установлен с возможностью поворота относительно неподвижной оси, перпендикулярной плоскости, проходящей через оси валов, причем на поверхности бочкообразных элементов, установленных на ведущем и ведомом валах, выполнены две винтовые впадины разной заходности с началом в одной точке и углом обхвата 180°, каждая из которых является продолжением одной из впадин зубьев соответствующей шестерни, а на поверхности бочкообразного элемента, установленного на промежуточном валу, выполнены два винтовых зуба разной заходности с началом в одной точке и углом обхвата 180°, каждая из которых является продолжением одного из зубьев соответствующей шестерни. 2. Коробка передач по п.1, отличающаяся тем, что промежуточный вал смонтирован на крестовине, качающейся относительно неподвижной оси, перпендикулярной плоскости, проходящей через оси валов. 3. Коробка передач по пп. 1 и 2, отличающийся тем, что ведущий и ведомый валы имеют фотодатчики, выполненные в виде дисков с пазом и фотоэлементами, включенными последовательно в электрическую цепь исполнительного механизма.
2. Коробка передач по п.1, отличающаяся тем, что промежуточный вал смонтирован на крестовине, качающейся относительно неподвижной оси, перпендикулярной плоскости, проходящей через оси валов. 3. Коробка передач по пп. 1 и 2, отличающийся тем, что ведущий и ведомый валы имеют фотодатчики, выполненные в виде дисков с пазом и фотоэлементами, включенными последовательно в электрическую цепь исполнительного механизма.Описание изобретения к патенту
Изобретение относится к машиностроению и, в частности, к транспортным средствам. Известно устройство (1) для изменения передаточного отношения, состоящее из муфты сцепления и многоступенчатой коробки передач, в которой переключение передач осуществляется остановкой трактора. Недостатками такого устройства для изменения передаточного отношения являются: уменьшение производительности агрегата из-за частых остановок на переключение передач; износ фрикционных дисков сцепления; перегрузка двигателя в момент разгона после каждого переключения передач. Недостатком такой конструкции является трудность обеспечения четкого переключения передач, т.к. для изменения передаточного отношения промежуточная шестерня должна в начале переместиться на ширину шестерни вместе с косой направляющей и только потом перемоститься по косой направляющей по зубчатым винтовым дорожкам до совмещения с шестернями следующей передачи. Следует отметить, что в такой конструкции коробки передач изменение передаточного отношения производит не более чем за четверть оборота быстроходного вала. Малый промежуток времени изменения передаточного отношения вызывает большие динамические нагрузки при осевых перемещениях промежуточного вала. Кроме того, все шестерни выполняются прямозубыми, что снижает их долговечность, создает шум при работе и вызывает значительные динамические нагрузки на элементах передачи. Целью настоящего изобретения является повышает надежности, эффективности работы и долговечности коробки передач без разрыва потока мощности.
Недостатком такой конструкции является трудность обеспечения четкого переключения передач, т.к. для изменения передаточного отношения промежуточная шестерня должна в начале переместиться на ширину шестерни вместе с косой направляющей и только потом перемоститься по косой направляющей по зубчатым винтовым дорожкам до совмещения с шестернями следующей передачи. Следует отметить, что в такой конструкции коробки передач изменение передаточного отношения производит не более чем за четверть оборота быстроходного вала. Малый промежуток времени изменения передаточного отношения вызывает большие динамические нагрузки при осевых перемещениях промежуточного вала. Кроме того, все шестерни выполняются прямозубыми, что снижает их долговечность, создает шум при работе и вызывает значительные динамические нагрузки на элементах передачи. Целью настоящего изобретения является повышает надежности, эффективности работы и долговечности коробки передач без разрыва потока мощности. Сущность изобретения заключается в том, что конические зубчатые колеса разных передач ведущего и ведомого валов соединены бочкообразными элементами с разными диаметрами оснований, нарезанными на выпуклой поверхности бочкообразных элементов по одной левозаходной и по одной правозаходной винтовых впадин, охватывающих по 180o угла поворота ведущего и ведомого блоков шестерен с началом от одной точки, а конические шестерни разных передач промежуточного вала тоже соединены бочкообразными элементами с разными диаметрами оснований, нарезанными на них одной левозаходной и одной правозаходной винтовых зубьев, охватывающих 180o угла поворота промежуточного блока шестерен с началом из одной точки. В момент изменения передаточного отношения разнозаходные винтовые зубья на бочкообразных элементах промежуточного блока шестерен контактирует соответствующими впадинами на бочкообразных элементам ведущего и ведомого блоков шестерен. Изменение передаточного отношения достигается плавным изменением угла наклона промежуточного вала при повороте его на 180o с одновременным осевым перемещением ведущего и ведомого блоков шестерен навстречу друг к другу.
Сущность изобретения заключается в том, что конические зубчатые колеса разных передач ведущего и ведомого валов соединены бочкообразными элементами с разными диаметрами оснований, нарезанными на выпуклой поверхности бочкообразных элементов по одной левозаходной и по одной правозаходной винтовых впадин, охватывающих по 180o угла поворота ведущего и ведомого блоков шестерен с началом от одной точки, а конические шестерни разных передач промежуточного вала тоже соединены бочкообразными элементами с разными диаметрами оснований, нарезанными на них одной левозаходной и одной правозаходной винтовых зубьев, охватывающих 180o угла поворота промежуточного блока шестерен с началом из одной точки. В момент изменения передаточного отношения разнозаходные винтовые зубья на бочкообразных элементах промежуточного блока шестерен контактирует соответствующими впадинами на бочкообразных элементам ведущего и ведомого блоков шестерен. Изменение передаточного отношения достигается плавным изменением угла наклона промежуточного вала при повороте его на 180o с одновременным осевым перемещением ведущего и ведомого блоков шестерен навстречу друг к другу. Причем, изменение угла наклонам промежуточного вала производится плавно и бочкообразные элементы промежуточного блока шестерен плавно обкатываются по бочкообразным элементам ведущего и ведомого блоков шестерен. Повышение надежности, эффективности работы и долговечности коробки передач достигается применением спиралевидных зубьев на конических шестернях ведущего, промежуточного и ведомого звеньев. Кроме того, в момент изменения передаточного числа крутящий момент передается от правозаходной винтовой впадины ведущего элемента на винтовой правозаходной зуб промежуточного элемента, а оттуда через левозаходной винтовой зуб промежуточного элемента на ведомозаходную впадину ведомого элемента. Левозаходные и правозаходные винтовые впадины на ведущем и ведомом бочкообразном элементах являются продолжением одной из впадин шестерен на соответствующих валах, а винтовые зубья на бочкообразном элементе промежуточного вала продолжением по одному зубу соответствующей заходности шестерен промежуточного вала.
Причем, изменение угла наклонам промежуточного вала производится плавно и бочкообразные элементы промежуточного блока шестерен плавно обкатываются по бочкообразным элементам ведущего и ведомого блоков шестерен. Повышение надежности, эффективности работы и долговечности коробки передач достигается применением спиралевидных зубьев на конических шестернях ведущего, промежуточного и ведомого звеньев. Кроме того, в момент изменения передаточного числа крутящий момент передается от правозаходной винтовой впадины ведущего элемента на винтовой правозаходной зуб промежуточного элемента, а оттуда через левозаходной винтовой зуб промежуточного элемента на ведомозаходную впадину ведомого элемента. Левозаходные и правозаходные винтовые впадины на ведущем и ведомом бочкообразном элементах являются продолжением одной из впадин шестерен на соответствующих валах, а винтовые зубья на бочкообразном элементе промежуточного вала продолжением по одному зубу соответствующей заходности шестерен промежуточного вала. Причем для увеличения передаточного отношения используются правозаходные сопрягаемые винтовые элементы, а для уменьшения — левозаходные. Сущность изобретения поясняется чертежами: на фиг.1 принципиальная схема коробки-передач; на фиг. 2 схема механизма синхронизации углового поворота промежуточного и осевого перемещения ведущего и ведомого блоков шестерен; на фиг. 3 крепление промежуточного вала; на фиг.4 крепление ведущего и ведомого блоков шестерен на фиг.5 конструкция дисков; на фиг.6 — электрическая схема для фиксирования начала поворота промежуточного блока шестерен. Коробка передач содержит корпус 1, ведущий 2, промежуточный 3 и ведомый 4 валы с коническими шестернями разного диаметра 5,6,7, 8,9 и 10 со спиралевидными зубьями, установленными на соответствующих валах попарно с вершинами в разные стороны. Между каждой парой шестерен установлены бочкообразные элементы 11,12 и 13 с разными диаметрами оснований. На бочкообразных элементах ведущего и ведомого блоков шестерен нарезаны по две винтообразные впадины 14,15,16 и 17 разной заходности с началом из одной точки и углом обхвата 180o, переходящих впадины зубьев, а на бочкообразном элементе промежуточного блока шестерен нарезаны два винтообразных зуба 18 и 19 разной заходности с началом из одной точки с углом обхвата 180o, переходящие в спиралевидные зубья шестерен.
Причем для увеличения передаточного отношения используются правозаходные сопрягаемые винтовые элементы, а для уменьшения — левозаходные. Сущность изобретения поясняется чертежами: на фиг.1 принципиальная схема коробки-передач; на фиг. 2 схема механизма синхронизации углового поворота промежуточного и осевого перемещения ведущего и ведомого блоков шестерен; на фиг. 3 крепление промежуточного вала; на фиг.4 крепление ведущего и ведомого блоков шестерен на фиг.5 конструкция дисков; на фиг.6 — электрическая схема для фиксирования начала поворота промежуточного блока шестерен. Коробка передач содержит корпус 1, ведущий 2, промежуточный 3 и ведомый 4 валы с коническими шестернями разного диаметра 5,6,7, 8,9 и 10 со спиралевидными зубьями, установленными на соответствующих валах попарно с вершинами в разные стороны. Между каждой парой шестерен установлены бочкообразные элементы 11,12 и 13 с разными диаметрами оснований. На бочкообразных элементах ведущего и ведомого блоков шестерен нарезаны по две винтообразные впадины 14,15,16 и 17 разной заходности с началом из одной точки и углом обхвата 180o, переходящих впадины зубьев, а на бочкообразном элементе промежуточного блока шестерен нарезаны два винтообразных зуба 18 и 19 разной заходности с началом из одной точки с углом обхвата 180o, переходящие в спиралевидные зубья шестерен. Промежуточный блок шестерен установлен на оси подшипниках, которая в свою очередь жестко закреплена на крестовине 20. Крестовина имеет ось качания 21 и два пальца 22 и 23, входящие в пазы кронштейнов 24 и 25. Кронштейны жестко соединены с ведущим и ведомым блоками шестерен. На ведущем и ведомом валах жестко установлены диски 26 и 27 с пазом 28 для фиксирования одновременности подвода начал винтовых впадин к началам винтообразных зубьев разной заходности. Диски с фотоэлементом 29 и лампой 30 являются датчиком для фиксирования одновременности подвода начал винтообразных зубьев и начал винтообразных впадин к точкам сопряжения ведущего и ведомого блоков шестерен с промежуточным блоком шестерен или же датчиком исполнительного механизма устройства для изменения угла наклона промежуточного вала (условно не показано). Диски на ведущем и ведомом валах с фотодатчиками установлены для включения исполнительного механизма поворота крестовины. Для увеличения передаточного числа исполнительный механизм осуществляет поворот крестовины по часовой стрелке, а для уменьшения против часовой стрелки.
Промежуточный блок шестерен установлен на оси подшипниках, которая в свою очередь жестко закреплена на крестовине 20. Крестовина имеет ось качания 21 и два пальца 22 и 23, входящие в пазы кронштейнов 24 и 25. Кронштейны жестко соединены с ведущим и ведомым блоками шестерен. На ведущем и ведомом валах жестко установлены диски 26 и 27 с пазом 28 для фиксирования одновременности подвода начал винтовых впадин к началам винтообразных зубьев разной заходности. Диски с фотоэлементом 29 и лампой 30 являются датчиком для фиксирования одновременности подвода начал винтообразных зубьев и начал винтообразных впадин к точкам сопряжения ведущего и ведомого блоков шестерен с промежуточным блоком шестерен или же датчиком исполнительного механизма устройства для изменения угла наклона промежуточного вала (условно не показано). Диски на ведущем и ведомом валах с фотодатчиками установлены для включения исполнительного механизма поворота крестовины. Для увеличения передаточного числа исполнительный механизм осуществляет поворот крестовины по часовой стрелке, а для уменьшения против часовой стрелки. Предложенное устройство работает следующим образом. При включенной передаче крутящий момент от ведущего к ведомому валу передается через соответствующие шестерни ведущего, промежуточного и ведомого блоков. При одновременном совмещении начал винтообразных впадин разноименной заходности на ведущем и ведомом блоках шестерен с началом винтообразных зубьев разноименной заходности на промежуточном блоке шестерен на фотоэлементы попадает свет от ламп через пазы на дисках и ток пойдет через цепь фотодатчика, который включает исполнительный механизм поворота крестовины. Поворот крестовины будет до тех пор, пока диск не закроет отверстие фотоэлемента. Для изменения передаточного отношения ось промежуточного вала с крестовиной наклоняются либо по, либо против часовой стрелки и под действием передаваемого момента от исполнительного механизма бочкообразные элементы ведущего, промежуточного и ведомого блоков шестерен обкатываются друг относительно друга и одновременно пальцы крестовины перемещают кронштейны в противоположных направлениях.
Предложенное устройство работает следующим образом. При включенной передаче крутящий момент от ведущего к ведомому валу передается через соответствующие шестерни ведущего, промежуточного и ведомого блоков. При одновременном совмещении начал винтообразных впадин разноименной заходности на ведущем и ведомом блоках шестерен с началом винтообразных зубьев разноименной заходности на промежуточном блоке шестерен на фотоэлементы попадает свет от ламп через пазы на дисках и ток пойдет через цепь фотодатчика, который включает исполнительный механизм поворота крестовины. Поворот крестовины будет до тех пор, пока диск не закроет отверстие фотоэлемента. Для изменения передаточного отношения ось промежуточного вала с крестовиной наклоняются либо по, либо против часовой стрелки и под действием передаваемого момента от исполнительного механизма бочкообразные элементы ведущего, промежуточного и ведомого блоков шестерен обкатываются друг относительно друга и одновременно пальцы крестовины перемещают кронштейны в противоположных направлениях. В свою очередь кронштейны перемещают на соответствующую величину в осевом направлении ведущий и ведомый блоки шестерен. При этом крутящий момент передается от левозаходной винтовой впадины ведущего блоков на левозаходный винтовой зуб промежуточного блока, оттуда через правозаходной винтовой зуб того же блока на правоза. ходную впадину ведомого блока шестерен. За половину оборота ведущего вала завершается осевое перемещение ведущего и ведомого блока шестерен. За половину оборота ведущего вала завершается осевое перемещение ведущего и ведомого блоков шестерен и обкатывание их бочкообразных элементов относительно бочкообразного элемента промежуточного блока шестерен. Таким образом, из-за применения винтообразных зубьев в конических парах обеспечивается плавность и бесшумность работы и продолжение впадины зубьев ведущего и ведомого блоков шестерен и винтообразного зуба промежуточного блока шестерен на бочкообразных элементах позволяют плавно изменять передаточное отношение в коробке передач.
В свою очередь кронштейны перемещают на соответствующую величину в осевом направлении ведущий и ведомый блоки шестерен. При этом крутящий момент передается от левозаходной винтовой впадины ведущего блоков на левозаходный винтовой зуб промежуточного блока, оттуда через правозаходной винтовой зуб того же блока на правоза. ходную впадину ведомого блока шестерен. За половину оборота ведущего вала завершается осевое перемещение ведущего и ведомого блока шестерен. За половину оборота ведущего вала завершается осевое перемещение ведущего и ведомого блоков шестерен и обкатывание их бочкообразных элементов относительно бочкообразного элемента промежуточного блока шестерен. Таким образом, из-за применения винтообразных зубьев в конических парах обеспечивается плавность и бесшумность работы и продолжение впадины зубьев ведущего и ведомого блоков шестерен и винтообразного зуба промежуточного блока шестерен на бочкообразных элементах позволяют плавно изменять передаточное отношение в коробке передач.Ошибки системы изменения усилия на рулевом колесе VGRS Lexus серии GS
Коды неисправностей системы изменения усилия на рулевом колесе VGRS, возможные причины и места неисправностей автомобилей Lexus серии GS выпускаемых с 2005 по 2011 год.
С1591 Привод — калибровка нейтрального положения не выполнена
Возможные причины и места неисправности:
-Привод рулевого управления
-Электронный блок управления усилителем рулевого управления
С1592 Привод — калибровка нейтрального положения не завершена
Возможные причины и места неисправности:
-Привод рулевого управления
-Электронный блок управления усилителем рулевого управления
С1593 Привод — неисправность номинального положения
Возможные причины и места неисправности:
-Привод рулевого управления
С1595 Потеря связи с блоком датчика положения рулевого колеса
Возможные причины и места неисправности:
-Датчик положения рулевого колеса
-Электронный блок управления усилителем рулевого управления
-Проводка и разъемы
С1597 Система VGRS / EPS — потеря связи
Возможные причины и места неисправности:
-Электронный блок управления системой EPS
-Электронный блок управления усилителем рулевого управления
-Шина данных CAN
С15А1 Привод — неисправность
Возможные причины и места неисправности:
-Проводка и разъемы
-Привод рулевого управления
-Электронный блок управления усилителем рулевого управления
С15А2 Привод — неисправность
Возможные причины и места неисправности:
-Проводка и разъемы
-Цепь источника питания
-Привод рулевого управления
-Электронный блок управления усилителем рулевого управления
С15АЗ Привод — неисправность
Возможные причины и места неисправности:
-Проводка и разъемы
-Привод рулевого управления
-Электронный блок управления усилителем рулевого управления
С15А4 Привод — неисправность
Возможные причины и места неисправности:
-Привод рулевого управления
С15А5 Привод — неисправность
Возможные причины и места неисправности:
-Привод рулевого управления
-Электронный блок управления усилителем рулевого управления
С15А6 Привод — неисправность
Возможные причины и места неисправности:
-Цепь источника питания
-Проводка и разъемы
-Привод рулевого управления
-Электронный блок управления усилителем рулевого управления
С15А9 Механизм блокировки — отклонение
Возможные причины и места неисправности:
-Привод рулевого управления
С15М Механизм блокировки — неполное освобождение
Возможные причины и места неисправности:
-Привод рулевого управления
С15АВ Механизм блокировки — неисправность включения
Возможные причины и места неисправности:
-Привод рулевого управления
С15В1 Электронный блок управления — неисправность
Возможные причины и места неисправности:
-Электронный блок управления усилителем рулевого управления
С15В2 Электронный блок управления — неисправность
Возможные причины и места неисправности:
-Электронный блок управления усилителем рулевого управления
С15ВЗ Электронный блок управления — неисправность
Возможные причины и места неисправности:
-Электронный блок управления усилителем рулевого управления
С15В4 Электронный блок управления — неисправность
Возможные причины и места неисправности:
-Электронный блок управления усилителем рулевого управления
С15С1 Датчик положения рулевого колеса — неисправность
Возможные причины и места неисправности:
-Датчик положения рулевого колеса
-Шина данных CAN
-Электронный блок управления усилителем рулевого управления
С15С2 Датчик положения рулевого колеса — неисправность цепи питания
Возможные причины и места неисправности:
-Датчик положения рулевого колеса
-Шина данных CAN
-Электронный блок управления усилителем рулевого управления
С15СЗ Электронный блок управления ABS — неисправность
Возможные причины и места неисправности:
-Электронный блок управления ABS
-Шина данных CAN
-Электронный блок управления усилителем рулевого управления
С15С4 Сигнал положения рулевого колеса
Возможные причины и места неисправности:
-Датчик положения рулевого колеса
-Электронный блок управления усилителем рулевого управления
С15С5 Сигнал положения электродвигателя привода
Возможные причины и места неисправности:
-Датчик положения рулевого колеса
-Электронный блок управления усилителем рулевого управления
С15С6 Источник питания — некорректное напряжение (IG)
Возможные причины и места неисправности:
-Предохранитель ECU-IG
-Цепь IG
-Система зарядки
-Электронный блок управления усилителем рулевого управления
С15С7 Источник питания электродвигателя — некорректное напряжение
Возможные причины и места неисправности:
-Предохранитель VGRS
-Цепь источника питания
-Электронный блок управления усилителем рулевого управления
С15С8 Реле источника питания — неисправность
Возможные причины и места неисправности:
-Предохранитель VGRS
-Электронный блок управления усилителем рулевого управления
U0100 Потеря связи с блоком управления двигателем / силовым агрегатом (А)
Возможные причины и места неисправности:
-Шина данных CAN
-Электронный блок управления двигателем
U0122 Потеря связи с блоком управления VDC
Возможные причины и места неисправности:
-Шина данных CAN
-Электронный блок управления ABS
U0123 Потеря связи с блоком датчика бокового перемещения (замедления)
Возможные причины и места неисправности:
-Датчик бокового перемещения и датчик замедления
-Шина данных CAN
U0126 Потеря связи с блоком датчика положения рулевого колеса
Возможные причины и места неисправности:
-Датчик положения рулевого колеса
-Шина данных CAN
U0131 Потеря связи с блоком управления усилителем рулевого управления
Возможные причины и места неисправности:
-Электронный блок управления системой EPS
-Шина данных CAN
определение рулевого управления с переменным передаточным числом (vgrs) и синонимы рулевого управления с переменным передаточным числом (vgrs) (английский)
Из Википедии, бесплатная энциклопедия
(перенаправлено из системы рулевого управления с переменным передаточным числом (VGRS))
Рулевое управление с усилителем (или, точнее, для большинства дорожных транспортных средств рулевое управление с усилителем ), помогает водителю автомобиля в управлении, направляя часть мощности транспортного средства на перемещение оси одного или нескольких опорных колес. На большинстве дорожных транспортных средств в качестве отказоустойчивого устройства должно быть механическое соединение. Первоначально изобретенная в начале 20 века, автомобильные инженеры реализовали эту теперь стандартную функцию с помощью различных технологий.
История
Самый ранний известный патент, связанный с гидроусилителем руля, был выдан Фредериком У. Ланчестером в Великобритании в феврале 1902 года. Его изобретение заключалось в том, чтобы «приводить в действие рулевой механизм с помощью гидравлической энергии». Следующий образец был зарегистрирован Патентным ведомством США 30 августа 1932 года Кларой Гайлис из Белмонта, штат Массачусетс.Есть еще один изобретатель, которому приписывают изобретение гидроусилителя руля по имени Чарльз Ф. Хаммонд, американец, родившийся в Детройте, который подал аналогичные патенты, первый из которых был зарегистрирован Канадским ведомством интеллектуальной собственности.
Корпорация Chrysler представила первую коммерчески доступную систему рулевого управления с усилителем на Chrysler Imperial 1951 года под названием Hydraguide. Большинство новых автомобилей теперь оснащены усилителем рулевого управления из-за тенденции к переднему приводу, большей массе автомобиля и более широким шинам, что увеличивает необходимое усилие рулевого управления.Современным транспортным средствам будет чрезвычайно сложно маневрировать на малых скоростях.
Гидравлические системы
Основная статья: Гидравлический усилитель рулевого управленияРезервуар с гидроусилителем рулевого управления и насос с приводом от шкива
Большинство систем рулевого управления с усилителем работают за счет использования гидравлической системы для поворота колес транспортного средства. Гидравлическое давление обычно обеспечивается героторным или пластинчато-роторным насосом, приводимым в действие двигателем транспортного средства. Гидравлический цилиндр двустороннего действия прикладывает усилие к рулевому механизму, который, в свою очередь, передает крутящий момент на ось поворота ходовых колес.Подача в цилиндр регулируется клапанами, управляемыми рулевым колесом; чем больший крутящий момент водитель прикладывает к рулевому колесу и валу, к которому он прикреплен, тем больше жидкости клапаны пропускают к цилиндру, и, следовательно, тем больше силы прикладывается для поворота колес в нужном направлении.
Один из способов измерения крутящего момента, прикладываемого к рулевому колесу, — это крепление торсиона к концу рулевого вала. При вращении рулевого колеса вращается прикрепленный рулевой вал и верхний конец прикрепленного торсиона.Поскольку торсион относительно тонкий и гибкий, а нижний конец не может вращаться полностью, стержень будет поглощать часть крутящего момента; нижний конец не повернется до верхнего конца. Разница во вращении между верхним и нижним концами торсиона может использоваться для управления клапаном, который позволяет жидкости течь в цилиндр, что обеспечивает поддержку рулевого управления; чем больше «скручивается» торсион, тем больше усиливается рулевое управление.
Поскольку используемые насосы являются поршневыми, их расход прямо пропорционален скорости вращения двигателя.Это означает, что при высоких оборотах двигателя рулевое управление, естественно, будет работать быстрее, чем при низких оборотах двигателя. Поскольку это было бы нежелательно, используются ограничительное отверстие и клапан регулирования потока, чтобы направить часть выходной мощности насоса обратно в гидравлический резервуар при высоких оборотах двигателя. Клапан сброса давления также используется для предотвращения опасного повышения давления, когда поршень гидроцилиндра достигает конца цилиндра.
Клапан сброса давления также используется для предотвращения опасного повышения давления, когда поршень гидроцилиндра достигает конца цилиндра.
Некоторые современные реализации также включают электронный предохранительный клапан, который может снизить гидравлическое давление в магистралях рулевого управления с усилителем при увеличении скорости автомобиля (это известно как рулевое управление с усилителем с регулируемым усилителем).
В некоторых тяжелых машинах используются только гидравлические системы, в которых нет поддержки в случае отказа двигателя насоса.
DIRAVI
В системе DIRAVI, изобретенной Citroën, сила поворота колес создается гидравлической системой высокого давления автомобиля и всегда одинакова, независимо от скорости движения. Когда рулевое колесо поворачивается, колеса одновременно поворачиваются на соответствующий угол с помощью гидравлического поршня. Чтобы создать ощущение искусственного рулевого управления, есть отдельная система с гидравлическим приводом, которая пытается повернуть рулевое колесо обратно в центральное положение. Величина прилагаемого давления пропорциональна скорости движения, поэтому на низких скоростях рулевое управление очень легкое, а на высоких скоростях очень трудно отойти от центрального положения больше, чем на небольшую величину.
Пока в гидравлической системе автомобиля есть давление, механическое соединение между рулевым колесом и опорными колесами отсутствует. Эта система была впервые представлена в Citroën SM в 1970 году и была известна как VariPower в Великобритании и SpeedFeel в США. общее преимущество рулевого управления с регулируемой скоростью.Сила центрирующего устройства увеличивается по мере увеличения скорости автомобиля.
Электрогидравлические системы
Электрогидравлические системы рулевого управления с усилителем, иногда сокращенно EHPS, а также иногда называемые «гибридными» системами, используют ту же технологию вспомогательного гидравлического оборудования, что и стандартные системы, но гидравлическое давление обеспечивается насосом, приводимым в действие электродвигатель вместо ременного привода.
В 1965 году Ford экспериментировал с парком машин Mercury Park Lanes, оснащенных системой «мгновенного рулевого управления», которые заменили обычное большое рулевое колесо двумя 5-дюймовыми (127 мм) кольцами, быстрым передаточным числом 15: 1 и электрогидравлический насос на случай остановки двигателя. [1] [2]
Электрогидравлические системы можно найти в некоторых автомобилях Ford, Volkswagen, Audi, Peugeot, Citroen, SEAT, Skoda, Suzuki, Opel, MINI, Toyota, Honda и Mazda.
Servotronic
Servotronic предлагает действительно зависящий от скорости усилитель рулевого управления, при котором количество сервоусилителя зависит от скорости движения и, таким образом, обеспечивает еще больший комфорт для водителя. Усилитель мощности максимален на низких скоростях, например, при парковке автомобиля. Чем больше ассистент, тем легче маневрировать.На более высоких скоростях электронная сенсорная система постепенно снижает уровень мощности. Таким образом, водитель может управлять автомобилем даже точнее, чем при использовании обычного рулевого управления с гидроусилителем. Сервотроник используется рядом автопроизводителей, включая Audi, BMW, Volkswagen, Volvo и Porsche. Сервотроник является товарным знаком AM General Corp. [3]
Сервотроник используется рядом автопроизводителей, включая Audi, BMW, Volkswagen, Volvo и Porsche. Сервотроник является товарным знаком AM General Corp. [3]
Электрические системы
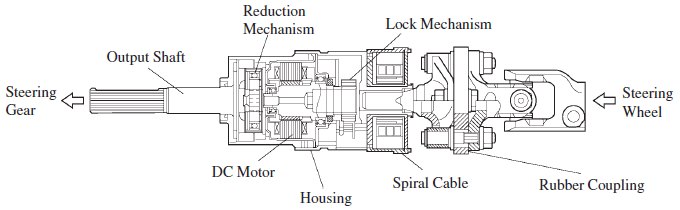
Электроусилитель руля ( EPS или EPAS ) предназначен для использования электродвигателя для уменьшения усилий за счет обеспечения рулевого управления водитель транспортного средства.Датчики определяют движение и крутящий момент рулевой колонки, а компьютерный модуль передает вспомогательный крутящий момент через электродвигатель, подключенный непосредственно к рулевому механизму или рулевой колонке. Это позволяет применять различный объем помощи в зависимости от условий вождения. Система позволяет инженерам адаптировать реакцию рулевого механизма к системам подвески с переменной скоростью и переменным демпфированием, достигая идеального сочетания плавности хода, управляемости и рулевого управления для каждого автомобиля. [4] На автомобилях группы Fiat количество помощи можно регулировать с помощью кнопки под названием «CITY», которая переключает между двумя разными кривыми помощи, в то время как большинство других систем EPS имеют переменную помощь, которая позволяет получить больше помощи, чем скорость автомобиля. автомобиль уменьшается и меньше помощи от системы во время высокоскоростных ситуаций.В случае выхода из строя компонента механическое соединение, такое как зубчатая рейка и шестерня, служит дублирующим механизмом аналогично гидравлическим системам. Рулевое управление с электроусилителем не следует путать с системами управления по проводам или по проводам, в которых для рулевого управления используются электродвигатели, но без какой-либо механической связи с рулевым колесом.
автомобиль уменьшается и меньше помощи от системы во время высокоскоростных ситуаций.В случае выхода из строя компонента механическое соединение, такое как зубчатая рейка и шестерня, служит дублирующим механизмом аналогично гидравлическим системам. Рулевое управление с электроусилителем не следует путать с системами управления по проводам или по проводам, в которых для рулевого управления используются электродвигатели, но без какой-либо механической связи с рулевым колесом.
Электрические системы имеют небольшое преимущество в топливной экономичности, поскольку в них нет постоянно работающего гидронасоса с ременным приводом, независимо от того, требуется ли помощь или нет, и это основная причина их внедрения.Другим важным преимуществом является отсутствие дополнительного оборудования двигателя с ременным приводом и нескольких гидравлических шлангов высокого давления между гидравлическим насосом, установленным на двигателе, и рулевым механизмом, установленным на шасси. Это значительно упрощает производство и обслуживание. Благодаря включению электронного контроля устойчивости системы рулевого управления с электроусилителем могут мгновенно изменять уровни крутящего момента, чтобы помочь водителю в маневрах уклонения.
Благодаря включению электронного контроля устойчивости системы рулевого управления с электроусилителем могут мгновенно изменять уровни крутящего момента, чтобы помочь водителю в маневрах уклонения.
Пиковая выходная мощность электрической системы автомобиля ограничивает возможности электрического усилителя рулевого управления.Например, 12-вольтовая электрическая система ограничена током около 80 ампер [ требуется ссылка ] , что, в свою очередь, ограничивает размер двигателя до менее 1 киловатта (12,5 вольт, умноженное на 80 ампер, равняется 1000 Вт). Этого количества мощности было бы достаточно для небольших транспортных средств. Вероятно, этого будет недостаточно для более крупных транспортных средств, таких как грузовики и внедорожники. Существуют и другие типы электрических систем, такие как электрическая система на 24 В и другие варианты, используемые для гибридных и электромобилей. Они обладают большей мощностью, что позволяет использовать многокиловатные двигатели, необходимые для больших и средних транспортных средств.
Они обладают большей мощностью, что позволяет использовать многокиловатные двигатели, необходимые для больших и средних транспортных средств.
Первые системы рулевого управления с электроусилителем появились на Honda NSX в 1990 году, Honda S2000 в 1999 году и на BMW Z4 [5] в 2002 году. Сегодня ряд производителей используют электроусилитель руля.
Обзоры в автомобильной прессе часто отмечают, что некоторые системы рулевого управления с электроусилителем не дают удовлетворительного «ощущения дороги». Ощущение дороги относится к соотношению между силой, необходимой для управления автомобилем, и силой, которую водитель прилагает к рулевому колесу.Ощущение дороги дает водителю субъективное представление о том, что он управляет автомобилем. Степень ощущения дороги контролируется компьютерным модулем, который управляет системой рулевого управления с электроусилителем. Теоретически программное обеспечение должно уметь регулировать ощущение дороги, чтобы удовлетворить водителей. На практике было трудно согласовать различные конструктивные ограничения, создавая более выраженное ощущение дороги. [ необходима цитата ] . Следует отметить, что тот же аргумент был применен и к гидроусилителю руля.
На практике было трудно согласовать различные конструктивные ограничения, создавая более выраженное ощущение дороги. [ необходима цитата ] . Следует отметить, что тот же аргумент был применен и к гидроусилителю руля.
Регулируемые передаточные числа
В конце 1960-х General Motors предложила систему гидроусилителя рулевого управления с регулируемым передаточным числом в качестве опции для Pontiac и других автомобилей. В 2000 году Honda выпустила S2000 Type V, оснащенную первой в мире системой рулевого управления с регулируемым передаточным числом с электроприводом (VGS). [6] [7] В 2002 году Toyota представила свою собственную систему «Рулевое управление с переменным передаточным числом (VGRS)», внедренную на Lexus LX 470 и Landcruiser Cygnus, а также включила электронную систему контроля устойчивости для изменения передаточных чисел рулевого механизма. и уровни помощи при рулевом управлении. В 2003 году BMW представила свою систему «активного рулевого управления» на 5-й серии. [8]
В 2003 году BMW представила свою систему «активного рулевого управления» на 5-й серии. [8]
Эту систему не следует путать с усилителем рулевого управления с регулируемым усилителем, который изменяет крутящий момент усилителя рулевого управления, а не передаточными числами рулевого управления, или с системами, в которых передаточное число изменяется только в зависимости от угла поворота рулевого колеса.
Ссылки
Внешние ссылки
Производители:
Регулировка переменного передаточного числа с использованием угла скольжения кузова
Инжиниринг
Том.6 No8 (2014), номер статьи: 47765,10 стр.
DOI: 10.4236 / eng.2014.68046
Управление переменным передаточным числом с помощью угла скольжения кузова
Такахико Ёсино, Хиромити Нодзаки
Кафедра машиностроения, Университет Когакуин, Токио, Япония
Электронная почта: ad12002 @ ns. kogakuin.ac.jp
kogakuin.ac.jp
Авторские права © 2014 авторов и Scientific Research Publishing Inc.
Эта работа находится под лицензией Creative Commons Attribution International License. (CC BY).
http: // creativecommons.org / licenses / by / 4.0 /
Поступило 29.04.2014 г .; пересмотрено 30 мая 2014 г .; принята к печати 11 июня 2014 г.
АННОТАЦИЯ
Автомобили с изменяемыми характеристиками рулевого управления давно изучаются и сравниваются. с теми, которые имеют типичное рулевое управление с фиксированным передаточным числом, и переменное передаточное число
как сообщается, улучшенная маневренность и устойчивость на высоких скоростях.
при смене полосы движения и на скользком дорожном покрытии с низким коэффициентом трения.Однако не ясно
как должны быть установлены передаточные числа для индивидуальных характеристик автомобиля. Следовательно,
В настоящем исследовании изучалась регулируемая система рулевого управления с использованием проскальзывания кузова.
обратная связь по углу с целью улучшения маневренности и устойчивости в
критический диапазон прохождения поворотов и вверх, сверх критического предела, и в
диапазон встречной управляемости.Результаты эксперимента на симуляторе вождения показывают, что
улучшается эффект рулевого управления, повышается маневренность и устойчивость в критических условиях.
с теми, которые имеют типичное рулевое управление с фиксированным передаточным числом, и переменное передаточное число
как сообщается, улучшенная маневренность и устойчивость на высоких скоростях.
при смене полосы движения и на скользком дорожном покрытии с низким коэффициентом трения.Однако не ясно
как должны быть установлены передаточные числа для индивидуальных характеристик автомобиля. Следовательно,
В настоящем исследовании изучалась регулируемая система рулевого управления с использованием проскальзывания кузова.
обратная связь по углу с целью улучшения маневренности и устойчивости в
критический диапазон прохождения поворотов и вверх, сверх критического предела, и в
диапазон встречной управляемости.Результаты эксперимента на симуляторе вождения показывают, что
улучшается эффект рулевого управления, повышается маневренность и устойчивость в критических условиях. дальность прохождения поворотов и вверх, сверх критического предела, и в противодействие поворачиваемости
диапазон за счет применения линейно-переменного управления к передаточному числу рулевого управления от пробуксовки кузова
угол 5˚. Этот результат наблюдается как при смене полосы движения, так и при смене полосы движения.
уклонение, и в J-поворотах с длительным заносом.Более того, это показывает улучшение
в управляемости заносом за счет быстрого противодействия. В целом нынешняя система
может повысить способность водителя избегать опасностей.
дальность прохождения поворотов и вверх, сверх критического предела, и в противодействие поворачиваемости
диапазон за счет применения линейно-переменного управления к передаточному числу рулевого управления от пробуксовки кузова
угол 5˚. Этот результат наблюдается как при смене полосы движения, так и при смене полосы движения.
уклонение, и в J-поворотах с длительным заносом.Более того, это показывает улучшение
в управляемости заносом за счет быстрого противодействия. В целом нынешняя система
может повысить способность водителя избегать опасностей.
Ключевые слова: Управление движением, автомобиль, динамика транспортного средства, маневренность, Переменное передаточное число
1. Введение
Введение
Транспортные средства с изменяемыми характеристиками рулевого управления изучаются давно, и
В частности, показана эффективность управления переменным передаточным числом [1] — [4]. Регулировка передаточного числа
соответствует реакции автомобиля на действия водителя, что улучшает маневренность.
и стабильность, изменяя соотношение между углом поворота рулевого колеса и
угол поворота шин.Предлагаемые решения включают регулируемое передаточное число.
(VGR), где передаточное число изменяется в зависимости от угла поворота рулевого колеса, Variable
Рулевое управление с передаточным числом (VGS), при котором передаточное число изменяется в зависимости от автомобиля.
скорость и угол поворота рулевого колеса, а также рулевое управление с переменным передаточным числом (VGRS), где
передаточное число меняется в зависимости от скорости автомобиля, угловой скорости поворота,
а также расколотые дороги трения. По сравнению с обычным фиксированным передаточным числом, рулевое управление
с переменным передаточным числом, как сообщается, имеет улучшенную маневренность
и устойчивость при скоростной смене полосы движения и на скользком дорожном покрытии с низким коэффициентом трения.
[5]. Кроме того, Нозаки сообщает, что когда
задние колеса попадают в диапазон сноса, транспортным средством легче управлять (даже если
неустойчивый) за счет использования регулируемого рулевого механизма, где рулевой механизм
соотношение 7.5 — 9,0 [6]. Однако это
не обязательно ясно, как должны быть установлены передаточные числа для индивидуальных характеристик автомобиля.
Таким образом, в настоящем исследовании изучалась регулируемая система рулевого управления с
обратная связь по углу скольжения кузова для повышения маневренности и устойчивости
в критическом диапазоне прохождения поворотов и выше, превышающем критический предел, и
в диапазон противодействия.
По сравнению с обычным фиксированным передаточным числом, рулевое управление
с переменным передаточным числом, как сообщается, имеет улучшенную маневренность
и устойчивость при скоростной смене полосы движения и на скользком дорожном покрытии с низким коэффициентом трения.
[5]. Кроме того, Нозаки сообщает, что когда
задние колеса попадают в диапазон сноса, транспортным средством легче управлять (даже если
неустойчивый) за счет использования регулируемого рулевого механизма, где рулевой механизм
соотношение 7.5 — 9,0 [6]. Однако это
не обязательно ясно, как должны быть установлены передаточные числа для индивидуальных характеристик автомобиля.
Таким образом, в настоящем исследовании изучалась регулируемая система рулевого управления с
обратная связь по углу скольжения кузова для повышения маневренности и устойчивости
в критическом диапазоне прохождения поворотов и выше, превышающем критический предел, и
в диапазон противодействия.
С другой стороны, Нозаки сообщает, что дифференциальный ассистент рулевого управления (DSA) эффективен. так как это может уменьшить задержку контруправления при прохождении поворотов в заносе [7] — [9]. Мы предположили, что комбинация дифференциальных усилителей рулевого управления и регулируемой системы рулевого управления, предложенной в настоящее исследование обещает быть значительно эффективным; поэтому мы также исследовали это совместный метод управления.В настоящем исследовании рассматриваются транспортные средства, где бесплатно реализовано переменное управление характеристиками рулевого управления передними колесами, например как транспортные средства с электроприводом, которые, вероятно, станут стандартом в будущем. Мы исследовали управление переменным передаточным числом, которое улучшает способность водителя избегать опасностей за счет использования степеней свободы систем с управляемым проводом.Мы провели следственное поэкспериментируйте с симулятором вождения, который поддерживает дрифт-повороты, результаты из которых, представленные здесь, показывают, что добавление механизма управления обещает быть замечательным эффективный.
2. Экспериментальная установка
2.1. Симулятор вождения для имитации заноса на поворотах
Симулятор вождения, использованный в настоящем исследовании, реалистично воспроизводит не только сцепление в поворотах, но и в поворотах с заносом. Он может имитировать обширное рыскание. и боковое ускорение за счет трехосного управления (рыскание, крен и поперечное перемещение), и динамическое поведение, такое как вращение или дрейф в критической зоне / диапазонах поворота можно воспроизвести.Симулятор вождения состоит из трех частей — ПК для управления, устройство движения и панель управления — и выполняет трехосное управление на основе скорости рыскания и бокового ускорения, создаваемого CarSim. Вождение Конфигурация симулятора показана на рисунке 1, а Технические характеристики устройства управления движением приведены в Таблице 1. Подопытных задернуты черными занавесками, чтобы усилить ощущение реального вождение, и субъекты управляют транспортным средством на основе движущихся изображений вождения ситуации, проецируемые на дисплей.
2.2. Модель машины
CarSim, симулятор всего транспортного средства, разработанный Mechanical Simulation Corporation. (MSC, США), используется как модель транспортного средства для симулятора вождения. В таблице 2 указано количество основных компонентов автомобиля и количество степеней свободы. Технические характеристики тестового автомобиля, использованного в этом Эксперименты показаны в Таблице 3
Таблица 1.Параметры и производительность симулятора вождения.
Таблица 2. Компоненты и степени свободы модели транспортного средства [10] .
Таблица 3.Параметры для расчета.
Сконфигурирована модель автомобиля с компоновкой FR (передний двигатель, задний привод). за компоновку двигателя и систему привода.
Типичные характеристики шины, как показано на рисунке 2, были использованы для характеристик силы поворота шины.Максимальная сила поворота имеет угол скольжения 10˚, а характеристики разгона и торможения были настроены, как показано на рисунке 3. Когда угол скольжения и коэффициент скольжения применяются одновременно, они рассчитываются с использованием концепция круга трения. Окончательное поведение в настоящем исследовании демонстрирует занос задних колес.Таким образом, предел сцепления в настоящей статье дается для точка, в которой задние колеса создают максимальное усилие на повороте.
3. Система управления транспортными средствами
3.1. Система регулируемого рулевого механизма с использованием обратной связи по углу скольжения кузова
В пределах диапазона сцепления адекватное передаточное число рулевого механизма для обычных автомобилей 15.0 — 18.0 эффективен. Из-за значительного количества рулевого управления, чтобы достичь контруправляемости. угол, необходимый в диапазоне дрейфа, может возникнуть временная задержка. Поэтому мы поставили гипотеза о том, что уменьшение передаточного числа рулевого механизма будет эффективным. Для переменной система рулевого механизма, используемая в настоящем исследовании, мы использовали модель, которая применяет переменные управление передаточным числом рулевого механизма с помощью угла скольжения кузова (рис. 4).VGR1 различает дрейф и захват на основе скольжения тела угол. Когда угол скольжения кузова превышает 10˚ (угол скольжения кузова на максимальном сила поворота) передаточное число рулевого механизма снижено с 18 до 6 ступеней. Другими словами, когда автомобиль дрейфует, передаточное число рулевого механизма изменяется, и задержка контррулевания уменьшена. VGR2 изменяет передаточное отношение рулевого механизма в линейный режим при угле скольжения корпуса 5 ° и более.Поворотная сила уменьшается, и эффект рулевого управления отстает в критическом диапазоне поворота. Понижение передаточное число рулевого механизма улучшает эффект рулевого управления. Передаточное число рулевого механизма равно поддерживается на уровне 6 для угла скольжения кузова 10 ° или более. Благодаря этому маневренность можно ожидать улучшения устойчивости в критическом диапазоне прохождения поворотов и выше. сверх предела и в диапазон противодействия.
3.2. Дифференциальный ассистент рулевого управления
Символов:
Рис. 2. Прохождение шины на поворотах. силовые характеристики.
Рисунок 3.Продольный силовые характеристики шин.
δ f : Фактический угол поворота передних колес
δ H : Угол поворота рулевого колеса
: Угловая скорость рулевого управления N: передаточное число рулевого механизма P: дифференциал постоянная усилителя рулевого управления
(1)
Как показано в уравнении (1), для дифференциального усилителя рулевого управления используется метод. (DSA), где сумма произведения угла поворота рулевого колеса и передаточного числа и произведение дифференцированного значения угла поворота рулевого колеса и константы DSA. P вводятся как фактический угол поворота передних колес. [11] [12].Применяя дифференциальное рулевое управление помощь в управлении, когда угол увода кузова превышает 10 °, задержка противодействия можно уменьшить. При изменении этого значения P усиливается эффект дифференциального рулевого управления. могут быть усилены или ослаблены. Фактически, блок управления дифференциальным усилителем рулевого управления (Рисунок 5) был предоставлен для управления Simulink в симуляторе вождения, обсуждаемом в разделе 2.
4. Проверочный эксперимент с использованием симулятора вождения
4.1. Экспериментальный метод
Для настоящего исследования мы провели эксперимент с двойной сменой полосы движения, например, при уклонении от опасностей и на трассе с поворотом на J. Экспериментальный курс иллюстрирован. на рисунке 6.Для смены курса с двойной полосой движения, автомобиль вошел на курс по прямой с максимальной скоростью проезда 135 км / ч и управляемый так, чтобы он не выезжал за пределы полосы движения. Для трассы J-Turn Скорость автомобиля составляла 90 км / ч, это достаточно высокая скорость, которая сопровождается заносом. Скорость автомобиля была настроена на поддержание заданной скорости. Испытуемые были проинструктированы сконцентрироваться на рулевом управлении и следовать намеченному курсу.Эксперимент был проводится по четырем вариантам: VGR1, VGR2, DSA + VGR2 (константа DSA P = 0,07) и No Control (обычные автомобили FR без управления), как описано в Таблица 4 Субъект считался выполнившим эксперимент был успешным, если они завершили курс, и провалился, если они существенно отклонился от курса или выкрутил автомобиль.Эксперимент был выполнить пять раз для каждого варианта в случайной последовательности. Темы перечислены в Таблица5 Эксперимент проводился с суммарным из четырех испытуемых: один испытуемый был относительно знаком с вождением автомобиля (Субъект A), один субъект имел водительские права, но почти никогда не водил машину (Субъект B), и два
Рисунок 4.Сравнение изменение передаточного числа VGR2 и VGR1.
Рисунок 5. Блок-схема системы дифференциального рулевого управления.
Рисунок 6.Курс (двойной смена полосы движения, поворот J).
Таблица 4. Схема эксперимента.
Таблица 5.Характеристики предмета.
субъекты иногда вели (Субъект C) и (Субъект D). Испытуемых спросили пройти 30-минутную тренировку перед экспериментом, чтобы ознакомиться с использованием симулятора вождения.
4.2.Результаты экспериментов с двойной сменой полосы движения и наблюдений на беговых данных
На рисунке 7 показаны экспериментальные результаты для субъекта. A (экспериментальные результаты для других испытуемых показали аналогичные тенденции). Путешествие траектория в эксперименте, показанном на рисунке 7 (а) проясняет, что для DSA + VGR2 траектория движения почти полностью сохраняется в пределах курса, и около выхода с курса было небольшое отклонение.Для VGR2, машина проехала точку немного за пределами трассы, но в конечном итоге вернулся на курс. Для VGR1 и No Control автомобиль не мог следовать курс в конце однополосной смены около 150 м и выезд с трассы.
На основании результатов измерения угла скольжения корпуса, показанных на Рисунке 7 (b), мы обнаружили, что угол скольжения корпуса наиболее уменьшается для DSA + VGR2.Угол скольжения был стабильным с максимумом 14˚ и быстро сходился. Для VGR2 угол скольжения увеличен максимум на 25˚, но за счет применения переменного управления на передаточном числе рулевого механизма при угле скольжения кузова 5˚ эффект рулевого управления улучшился на критическом диапазоне прохождения поворотов и начал сходиться. Для VGR1 и Нет контроля, угол скольжения корпуса превысил 10 ° с примерно 3.5 секунд, введено диапазон дрейфа и развернулся. Для VGR1 автомобиль был взят под контроль изменение передаточного числа рулевого механизма на 6, когда угол скольжения кузова достигал 10˚, но радикально изменившееся ощущение рулевого управления повлияло на дальнейшую работу водителя, и машина в конце концов закрутилась. В варианте без контроля автомобиль был не единожды взяли под контроль и раскрутили.
Скорость рыскания показана на Рисунке 7 (c). Это был в пределах от 40 до -60 град / с для DSA + VGR2 и VGR2, а поведение тела был стабильным. Для VGR1 и No Control наблюдалась значительная аберрация со всех сторон. 3,5 секунды, когда транспортное средство вошло в состояние заноса и не видно рысканья. Оцените, что автомобиль выкрутился.
Угол поворота рулевого колеса показан на Рисунке 7 (d). Рулевое колесо было повернуто примерно на 2 секунды с изменением схемы поворота, а для VGR2 и DSA + VGR2 величина рулевого управления была небольшой, и сходимость в Съезд со сменой полосы движения был быстрым и стабильным. Это связано с влиянием DSA на дрейф диапазон и эффект VGR2 в областях, связанных с диапазонами захвата-дрейфа.Для VGR1 и No Control, величина рулевого управления в значительной степени нестабильна.
Рисунок 8 иллюстрирует успешность эксперимента. Результаты показывают, что по всем предметам самый высокий показатель успеха был у DSA. + VGR2. При сравнении следующего наиболее успешного VGR2 с DSA + VGR2 эффект о наличии или отсутствии DSA становится очевидным.Показатель успеха для VGR1 был ниже, чем у VGR2, и разница в эффекте рулевого управления на критических поворотах можно сказать, что диапазон с углом скольжения 5˚ — 10˚ влияет на успех темп. Уровень успеха для варианта без контроля составил 0% для всех субъектов, и они едва умели водить машину.
(а) (б) (в) (г)
Рисунок 7.Результаты эксперимента. а) траектория бега; b) угол скольжения кузова автомобиля; c) скорость рыскания; (d) Рулевое управление угол поворота колес.
Рисунок 8. Анализ успеха (двойной курс смены полосы движения).
4.3. Результаты эксперимента по трассе J-Turn и наблюдения, основанные на беге Данные
На рисунке 9 показаны экспериментальные результаты для субъекта. A (экспериментальные результаты для других испытуемых показали аналогичные тенденции). Как есть ясно от траектории движения в эксперименте, как показано на рисунке 9 (а), курс наиболее точно соблюдался с DSA + VGR2.Для VGR2 транспортное средство унесло наружу примерно на 20 м возле курса J-поворота. но в итоге вернулся на курс. Для VGR1 автомобиль ускользнул наружу. примерно в 40 м от выхода с J-образного поворота и не смог проследовать по курсу. Для Вариант без контроля, курс не может быть пройден, и транспортное средство выехало курс.
Угол скольжения корпуса, показанный на Рисунке 9 (b), показывает поведенческие различия для всех вариантов помощи примерно от 5 секунд, когда автомобиль вошел в состояние поворота.Для DSA + VGR2 колебания угла скольжения стабилизировалась даже после входа в диапазон дрейфа, а схождение было быстрым. Следующий, максимальное значение для VGR2 практически не отличалось от значения для DSA + VGR2, но сохраняя состояние дрейфа стало затруднительным. Однако, поскольку эффект рулевого управления улучшился за счет применения переменного управления передаточным числом рулевого механизма, движение к конвергенции можно было сделать.В случае с VGR1 чувство рулевого управления претерпело радикальные изменения. через переключатель в передаточном числе рулевого механизма, и хотя автомобиль не раскручивание, оно было нестабильным, схождение задерживалось. Для варианта без контроля значение быстро увеличивалось примерно с 8 секунд, и автомобиль ни разу не был вернулся под контроль и развернулся.
Скорость рыскания показана на Рисунке 9 (c). График показывает, что для DSA + VGR2 скорость рыскания изменилась незначительно, а корпус оставалась стабильной. Для VGR2 было больше изменений в скорости рыскания, но это началось сходиться от 8 секунд. Количество вариаций для VGR1 оставалось большим до тех пор, пока конец.Вариант без контроля показал существенное отклонение при вращении автомобиля. примерно с 8 секунд.
(а) (б) (в) (г)
Рисунок 9. Результаты эксперимента. а) траектория бега; b) угол скольжения кузова автомобиля; c) скорость рыскания; (d) Рулевое управление угол поворота колес.
Угол поворота рулевого колеса показан на Рисунке 9 (d). Это показывает, что в трех случаях, когда применяется контроль, тело контролируется. через противодействие. Для варианта DSA + VGR2 эффект DSA допускал небольшие исправления кузова после того, как он вошел в диапазон дрейфа, и руль можно быстрее всего вернуться к рулевому управлению по прямой.Для VGR2 и VGR1, различия возникли в работе водителя из-за регулируемой системы рулевого управления. Для VGR2 угол поворота рулевого колеса был максимальным — около 9 секунд, а величина операции постепенно снизились. Для VGR1 угол поворота рулевого колеса был наибольшим. около 16 секунд без особого изменения количества операций для всего курс.Поскольку вариант No Control не имел вспомогательной функции, рулевое колесо реакция была медленной, и телом нельзя было управлять с помощью противодействия.
На рисунке 10 показаны показатели успешности эксперимента. Показатели успеха оказались самыми высокими при использовании DSA + VGR2 для всех субъектов. Благоприятный результаты были достигнуты за счет мультипликативного эффекта контроля DSA в диапазонах где был превышен предел прохождения поворотов, что способствовало улучшению рулевого управления эффект от VGR2 вблизи диапазона захвата.Следующие лучшие результаты достигла VGR2, VGR1 и No Control в указанном порядке.
5. Заключение
В настоящем исследовании изучалась регулируемая система рулевого управления с проскальзыванием кузова. обратная связь по углу с целью улучшения маневренности и устойчивости в критический диапазон прохождения поворотов и вверх, сверх критического предела, и в диапазон встречной управляемости.Результаты показывают, что эффект рулевого управления улучшается и маневренность. и повышение устойчивости при прохождении поворотов в критическом диапазоне и выше, превышение критического предела, и в диапазон противодействия, применяя линейную переменную управление передаточным числом рулевого управления с угла увода кузова 5˚. Этот результат наблюдается как при смене полосы движения, например, при уклонении от опасностей, так и при поворотах на поворотах с долгий дрифт.Кроме того, он показал улучшение управляемости сносом за счет быстрая противодействие. Эффект мультипликации был обнаружен путем объединения существующей системы с дифференциальным усилителем рулевого управления, что упрощает управление поведением автомобиля в диапазоне дрейфа. Настоящая система может улучшить предотвращение опасности водителем. возможности.
Список литературы
- Мотояма, С.(2003) Возможности управления по проводам на динамике транспортного средства (темы: Автомобильная электроника в 21 веке). Журнал Общества автомобильных инженеров Японии, 57, 39-43.
- Ямане, К. (2004) Система активного рулевого управления (эссе). Журнал Общества автомобильных инженеров Японии, 58, 96-97.
- Амано Ю., Дои С. и Кавагути, Х.(1999) Улучшение маневра уклонения за счет активного контроля рулевого управления Угловые и крутящие характеристики. Труды Общества автомобильных инженеров of Japan, 30, 87-92.
- Симидзу, Ю., Каваи, Т., Язуриха, Дж. И Такимото, С. (1999) Эффекты и конструкция системы рулевого управления с изменяемым передаточным числом в зависимости от автомобиля Скорость и угол поворота рулевого колеса.Материалы ежегодной конференции автомобильного общества. Инженеры Японии, Иокогама, май 1999 г., 9-12.
- Симидзу Ю. (2003) Последний Приложения в технологиях управления передним рулевым управлением (Темы: Новые технологии в Активная безопасность). Журнал Общества автомобильных инженеров Японии, 57, 70-75.
- Нодзаки, Х.(2005) О влиянии передаточного числа рулевого колеса. Журнал факультета естественных наук и инженерии, Университет Кинки, 41, 37-41.
- Нодзаки, Х. (2005) Влияние дифференциального усилителя рулевого управления на характеристики дрейфующего бега. SAE Бумага, 2005-01-3472, 1-8. http://dx.doi.org/10.4271/2005-01-3472
- Нодзаки, Х.(2009) Рассмотрение управления методом рулевого управления в зависимости от дорожных ситуаций. Документ SAE, 2009-01-2866, 1-8. http://dx.doi.org/10.4271/2009-01-2866
- Нодзаки, Х., Симидзу, М., Сакуно, М. (2010) Рассмотрение критического поворота Управляющие характеристики с помощью симулятора вождения, обеспечивающего полное прохождение поворотов с дрейфом Ощущения.SAE International Journal of Commercial Vehicles, 2, 256-263. http://dx.doi.org/10.4271/2009-01-2922
- Ватанабэ Ю. и Сэйерс М.В. (2002) Расширенное программное обеспечение динамики транспортного средства для анализа, проектирования, управления и в реальном времени Тестирование. Труды АВЭК’02, 4545, 407-412.
- Нозаки, Х. (2009) Рассмотрение управления методом рулевого управления в зависимости от дорожных ситуаций. Сделки Японии Общество инженеров-механиков, C, 75, 781-788.
- Нодзаки, Х., Макита, М. и Ёшино Т. (2011) Рассмотрение метода рулевого управления, соответствующего электрическому Возраст автомобиля.Бумага SAE, 2011-01-2150, 1-6. http://dx.doi.org/10.4271/2011-01-2150
IRJET-Запрошенная вами страница не найдена на нашем сайте
IRJET приглашает статьи из различных инженерных и технологических дисциплин, для выпуска 10 (октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8 Issue 10, Октябрь 2021 г. Публикация продолжается …
Обзор статей
Получено IRJET «Импакт-фактор научного журнала: 7.529 «на 2020 г. Октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8 Выпуск 10, октябрь 2021 г. Публикация продолжается …
Обзор статей
Получено IRJET «Фактор влияния научного журнала: 7.529 «на 2020 г. Октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8 Выпуск 10, октябрь 2021 г. Публикация продолжается …
Обзор статей
Получено IRJET «Фактор влияния научного журнала: 7.529 «на 2020 г. Октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8 Выпуск 10, октябрь 2021 г. Публикация продолжается …
Обзор статей
Получено IRJET «Фактор влияния научного журнала: 7.529 «на 2020 г. Октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8 Выпуск 10, октябрь 2021 г. Публикация продолжается …
Обзор статей
Получено IRJET «Фактор влияния научного журнала: 7.529 «на 2020 г. Октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8 Выпуск 10, октябрь 2021 г. Публикация продолжается …
Обзор статей
Получено IRJET «Фактор влияния научного журнала: 7.529 «на 2020 г. Октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8 Выпуск 10, октябрь 2021 г. Публикация продолжается …
Обзор статей
Получено IRJET «Фактор влияния научного журнала: 7.529 «на 2020 г. Октябрь 2021 г.)
Отправить сейчас
IRJET Vol-8 Выпуск 10, октябрь 2021 г. Публикация продолжается …
Обзор статей
Получено IRJET «Фактор влияния научного журнала: 7.529 «на 2020 год.
Проверить здесь
IRJET получил сертификат регистрации системы менеджмента качества ISO 9001: 2008.
VGRS проблесковый маячок Lexus — YouTube
Оо, оо, оо, оо, оо6 января 2019 г., Кеннет Смит
23.03.2017 · Пожалуйста, не подписывайтесь, я продал машину, поэтому видео по ремонту от меня больше не будет. Спасибо! Индикатор Check Engine загорелся после того, как я очистил датчик массового расхода воздуха.Итак, я убедился, что все соединения …
Я получаю сообщение «проверьте видеомонтаж», и моя машина не заводится …
★ ★ ★ ★ ☆13 января 2019 г., Джозеф Кларк
3/16/2011 · У нас есть Lexus 2007 LS 460, и на приборной панели появляются 2 лампы, говорящие о проверке системы VCS и системы VGRS — отнес ее к дилеру, и они оценили стоимость ремонта рулевой тяги около 5000 долларов … читать далее
У меня проблема со светом «Проверьте VGRS» … — Ким Хорнбэк …
★ ★ ☆ ☆ ☆23 января 2019 г., Роберт Янг
28.03.2015 · Ким Хорнбэк Вашингтон в Lexus.28 марта 2015 г. · В течение последних 3-4 лет у меня на моем Lexus GS 450h 2008 года возникала проблема со светом «Check VGRS», я собираюсь заменить очень дорогую 12-вольтовую батарею в моем местном представительстве Lexus снова для 3-й раз! Я пока не знаю почему …
Lexus LS будет отозван из-за проблемы с VGRS | Лексус Энтузиаст
Оо, оо, оо, оо, оо5 января 2019 г. Автор: Кеннет Ли
Lexus готовится к отзыву моделей Lexus LS, оснащенных системой рулевого управления с регулируемым передаточным числом (VGRS): с марта этого года TMC расследует этот вопрос, и в Японии поступило около 10 жалоб.Сообщений о происшествиях, связанных с этой проблемой, не поступало, и мы …
После замены батареи, как мне заставить светиться vgrs погаснуть через …
★ ★ ☆ ☆ ☆13 января 2019 г. Дэниел Дэвис
31.07.2012 · Как мне заставить погаснуть световой индикатор vgrs в lexus lx470? — Отвечает проверенный механик Lexus … Загорается индикатор VGRS после разрядки аккумулятора, проверьте VGRS, 2007 Lexus. У моего механика нет, он сказал, что мне нужна новая батарея … ключ такой же, можем ли мы заставить систему безопасности распознать…
Prime Cuts: Рулевое управление с переменным передаточным числом Lexus — особенность …
★ ★ ★ ☆ ☆5 января 2019 г., Джордж Нельсон
2/16/2012 · Lexus утверждает, что его система более точна и работает быстрее, чем другие. VGRS можно найти на седане LS, внедорожнике LX и новом GS F Sport. Мы разрезали блок, чтобы понять, как он …
ВГРС светлый | IH8MUD Форум
Оо, оо, оо, оо, оо15 января 2019 г., Рональд Кэмпбелл
2/12/2016 · VGRS — Система рулевого управления с переменным передаточным числом На моделях, оборудованных VGRS, это регулирует угол поворота колеса на низких скоростях. .Кратковременное вождение должно включиться автоматически, и свет должен погаснуть.
Демонстрационное видео Lexus LS 2008 с регулируемым передаточным числом …
★ ★ ★ ★ ☆29 января 2019 г., Джейсон Филлипс
12/2/2011 · Как интерактивный арт-директор в Team One Advertising я отвечал за концепцию и исполнение около 20 демонстрационных видеороликов о безопасности Lexus LS. Технические подробности о VGRS на сайте Lexus …
Усилитель руля — Википедия
★ ★ ★ ★ ☆12 января 2019 г., Энтони Бейкер
В 2000 году на Honda S2000 Type V была установлена первая электрическая система рулевого управления с переменным передаточным числом (VGS).В 2002 году Toyota представила систему «Рулевое управление с переменным передаточным числом» (VGRS) на Lexus LX 470 и Landcruiser Cygnus, а также включила электронную систему контроля устойчивости для изменения передаточного числа рулевого механизма и уровней помощи при рулевом управлении.
VGRS — Что означает VGRS? Бесплатный словарь
★ ★ ★ ☆ ☆3 января 2019 г., Джозеф Джонс
Ищете онлайн-определение VGRS или что означает VGRS? VGRS внесен в крупнейшую и наиболее авторитетную словарную базу данных сокращений и акронимов в мире The Free Dictionary
.Проблемы с аккумулятором Lexus 450H 12V — Клуб владельцев Lexus
Оо, оо, оо, оо, оо22 января 2019 г., Джозеф Лопес
16.10.2015 · Больше никаких «Проверить гибридную систему»! Думаю, можно с уверенностью сказать, что предупреждение «Проверьте гибридную систему» может появиться по самым незначительным причинам! Я надеюсь, что этот пост поможет другим, кому нужно заменить батарею на 12 В, но не хотят платить Lexus £ 135 за новую (не установленную!).Ура
Отзывы Lexus GS 350 2013 года | Cars.com
★ ★ ★ ☆ ☆21 января 2019 г., Марк Робертс
TOYOTA БУДЕТ УВЕДОМЛЕНИТЬ ВЛАДЕЛЬЦЕВ, И ДИЛЕРЫ LEXUS БЕСПЛАТНО ОБНОВЛЯЮТ СИСТЕМУ VGRS. ОТЗЫВ ПО БЕЗОПАСНОСТИ НАЧАЛОСЬ 7 ИЮНЯ 2012 г. … Ознакомьтесь с нашими советами по техническому обслуживанию 101 или глоссарием терминов.