Как работает система курсовой устойчивости в экстремальной ситуации
Всем привет! На обсуждении у нас сегодня система курсовой устойчивости. Предлагаю поговорить о том, что это такое, для чего нужно, как работает и насколько сильно помогает в экстренных ситуациях.
Система имеет множество названий, в зависимости от автопроизводителей. Но суть везде одна. Она предназначена для обеспечения автоматического изменения, а точнее для корректировки, курсового положения транспортного средства в условиях, когда его начинает заносить.
Если говорить просто, то дополнительная электроника в машине позволяет при совершении маневра не выехать на встречную полосу и не оказаться в кювете. А ведь это сделать не так сложно, если на мокрой или скользкой дороге на высокой скорости выкрутить рулевое колесо.
У системы курсовой устойчивости (СКУ) богатая история, которая насчитывает около 20 лет. За это время электронная начинка улучшалась и модернизировалась. В итоге, как гласит Википедия, установка СКУ теперь предусмотрена практически на каждой машине.
Актуальные синонимы
Система стабилизации есть практически на всех авто. Это мы уже определили. Идентифицировать наличие СКУ можно по специальному значку приборной панели, который горит при активации. Хотя возможна ошибка, и тогда лампа не горит вовсе, либо горит постоянно. Это уже другой вопрос.
Система поддержания курсовой устойчивости пригодится для любого автомобиля. Мы разобрались уже, что такое СКУ и для чего она нужна. Подобная динамическая система курсовой устойчивости может быть установлена на:
- Киа Рио;
- Форд Фокус 3;
- Тойота Камри 40;
- Toyota Corolla;
- Лада Веста;
- Лада Гранта;
- Рено Дастер;
- Ниссан Кашкай;
- Шкода Фабия;
- Митсубиси Лансер и пр.
Интересен и тот факт, что довольно часто автомобилисты заявляют об отсутствии ESP, несмотря на соответствующий значок, загорающийся на приборной панели.
Здесь есть доля юмора. Надеюсь, вы поймете. Вместо ESP, как утверждают некоторые водители, у них стоит система VSC. Есть и те, у которых ESP заменили системой под названием DCS. Якобы она еще лучше стандартной СКУ. И такие отзывы в сети найти не составит большого труда.
Давайте по факту. Все озвученные аббревиатуры относятся к одной и той же системе. Просто именно ESP является самой популярной и распространенной. Ее использует большинство автопроизводителей из Европы и США.
Хотя стоит отметить, что на некоторых авто встречается другой значок, отвечающий за систему контроля курсовой устойчивости. Это не более чем синонимы. Но знать о них нужно, дабы не паниковать, что вас лишили ESP. Она наверняка есть, только под другим названием.
- ESC. Та же система, только называется несколько иначе. Такое понятие принято использовать корейскими автопроизводителями в лице Хендай и Киа, а еще японской фирмой Хонда;
- DSC. Такое обозначение динамического стабилизатора вы увидите на автомобилях производства БМВ, Лэнд Ровер и Ягуар;
- DTSC.
 Свое собственное обозначение, отличное от других фирм, используют в некогда полностью шведской компании Вольво;
Свое собственное обозначение, отличное от других фирм, используют в некогда полностью шведской компании Вольво; - Также некоторые модели Хонда и Акура используют в качестве названия СКУ аббревиатура VSA;
- Автомобили, выпускаемые под маркой Тойота, ESP не лишены. Только называется она у японцев VSC;
- Если вы встретили название VDC, то наверняка у вас что-нибудь из модельного ряда Субару, Ниссан или Инфинити.
Вне зависимости от названия, суть везде остается одной и той же.
Нельзя не отметить, что на некоторых машинах стоят более совершенные и улучшенные системы стабилизации. Это уже вопрос к нововведениям и повышению уровня безопасности.
Как это работает
Когда машину заносит в сторону при повороте, это не неисправность, а естественное поведение автомобиля, обусловленное законами физики. Потому каждый должен знать, что совершать маневры на высокой скорости очень опасно. Вращая руль в одну сторону, вас понесет в совершенно другую.
Главной задачей СКУ является предотвращение срыва машины в заносы или скольжения. Это происходит путем изменения момента вращения на одной из колес, которое относится к ведущим. За счет такой работы дальнейший занос предотвращается, машина возвращается в стабильное положение, маневр идет по плану. И тут дело не в мастерстве самого водителя, поскольку многие новички совершают одни и те же ошибки, банально не сбрасывая скорость перед поворотом.
Стоит понимать, что СКУ имеет огромное количество датчиков, которые определяют положение, скорость движения, развороты руля и многие другие параметры. Потому контроллер постоянно получает большое количество информации, которая анализируется и передается на органы управления. Тем самым удается быстро корректировать работу ведущих колес и тормозных цилиндров.
Экстремальной ситуацией можно считать занос при разгоне, во время наката или торможения на скользкой дороге. Подобное чаще происходит зимой, но также возможно при наличии небольшой лужи на дороге. Она провоцирует аквапланинг, водитель теряет частично управление. За счет системы стабилизации зачастую удается вернуться в исходное положение, продолжив движение по заданной траектории.
Приведем пример. Машина поворачивает влево на высокой скорости, и ее начинает заносить. В это мгновение активируется датчик заноса, что заставляет сократить подачу топлива и снизить скорость. Если это не помогает, СКУ автоматически подтормаживает правое заднее колесо. Система прекрасно адаптирована под работу на автомобилях со всеми видами коробок передач.
Способы стабилизации
Так уж произошло, что водитель частично потерял управление, либо выехал на скользкий участок дороги. Тут система начинает автоматически реагировать и воспринимать ситуацию как аварийную. Для этого производится анализ действий водителя и реальные параметры движения. Если намерения автомобилиста не совпадают с движением машины, ESP на это реагирует и включается в работу.
Есть несколько способов, с помощью которых удается достичь стабилизации:
- подтормаживание определенными колесами;
- изменение параметров крутящего момента;
- изменения в работе двигателя;
- внесение изменений в тормозные цилиндры;
- изменение демпфирования колесных амортизаторов;
- иные методы разных автопроизводителей.

Если система фиксирует недостаточную поворачиваемость, она не дает машине уйти в сторону за пределы заданной траектории. Для этого происходит подтормаживание внутреннего колеса и меняется текущий крутящий момент без участия самого водителя.
Если поворачиваемость недостаточная, чтобы предотвратить занос транспортного средства происходит подтормаживание уже наружного переднего колеса. Также корректируется крутящий момент. Чтобы подтормозить колеса, электроника запускает в работу дополнительные системы безопасности. Функционирует все по циклическому принципу. То есть повышается давление, удерживается давление или сбрасывается. Аналогично корректируется крутящий момент. Здесь активируется дроссельная заслонка, меняется пропуск в системы впрыска топлива, отменяется переключение передачи на автомате, пропускаются импульсы зажигания и пр.
Не скрою, что иногда СКУ срабатывает тогда, когда это не нужно. В результате водитель не может набрать быстро скорость или совершить иные безопасные маневры, поскольку электроника воспринимает их как угрозу. Потому на многих авто есть кнопка, решающая проблему того, как отключить систему. Злоупотреблять отключение ESP я не советую. В сети много примеров видео, где ESP не работало, и к чему это привело.
Потому на многих авто есть кнопка, решающая проблему того, как отключить систему. Злоупотреблять отключение ESP я не советую. В сети много примеров видео, где ESP не работало, и к чему это привело.
А на этом у меня все. Спасибо всем, кто с нами!
Подписывайтесь, оставляйте комментарии и задавайте вопросы!
Как работает система курсовой устойчивости VSA в автомобиле?
На чтение 4 мин. Просмотров 334
Система VSA – это устройство, которое позволяет с легкостью стабилизировать курс автомобиля. При этом водителю нужно приложить минимум усилий.
Если говорить коротко и упрощенно, то система VSA – это техника, с помощью которой можно стабилизировать курс автомобиля. Однако в любом случае необходимо следить за дорогой. Ведь она сама по себе, без помощи водителя, не сможет следить за устойчивостью автомобиля. Вряд ли даже неопытному автомобилисту нужно долго говорить о важности курсовой устойчивости. Поэтому крайне важным является то, чтобы установленная в вашем автомобиле система VSA была качественной.
Поэтому следует выбирать устройство, находящееся в среднем ценовом диапазоне, так как слишком дешевая техника не блещет высоким качеством.
Система курсовой устойчивости vsaВпервые VSA была опробована в 1995 году. Не сразу все водители могли ее себе позволить, да и они не оценили ее эффективность. Прошло немало времени, пока ее достоинства были признаны в полной мере. Сейчас же она является просто необходимым элементом для безопасности практически любого автомобиля.
Подробнее об устройстве VSA
VSA представляет собой довольно сложную электронную систему, которая состоит из двух основных частей – ABS и антипробуксовочную систему. Взаимосвязь VSA с автомобилем, которая заключается в получении информации об его работе, которую можно свести к данным об угрозах курсовой устойчивости, осуществляется через датчики. Главным образом датчики контролируют то, как работает трансмиссия. Также в их специализацию входит и контроль работы мотора, давления в тормозах, поперечного ускорения, угла, под которым поворачивается руль, мощности двигателя, скорости вращения каждого колеса.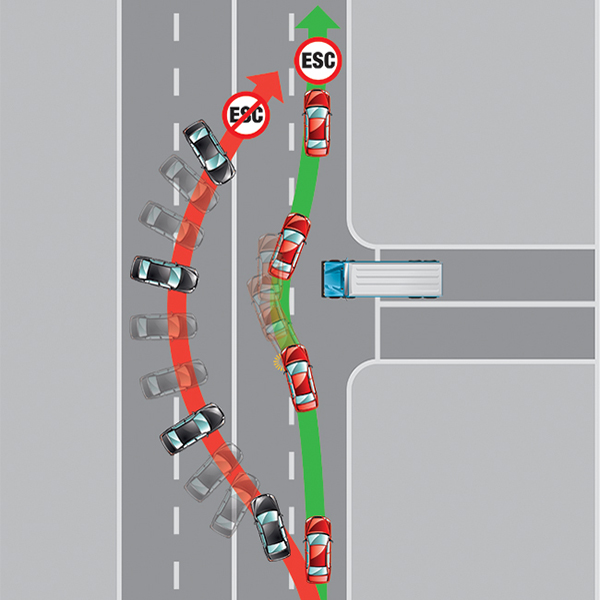 Таким образом, через датчики система получает практически всю сколько-нибудь значимую информацию об угрозах курсовой устойчивости движения автомобиля. Такая слежка осуществляется 25 раз в секунду. Синтез всей этой информации производится в вычислительном блоке, которым обладает система VSA.
Таким образом, через датчики система получает практически всю сколько-нибудь значимую информацию об угрозах курсовой устойчивости движения автомобиля. Такая слежка осуществляется 25 раз в секунду. Синтез всей этой информации производится в вычислительном блоке, которым обладает система VSA.
Синтез этой информации позволяет уловить потенциальное изменение направления движения автомобиля. Одним из важнейших факторов курсовой устойчивости является возникающая при движении по кривой траектории центробежная сила.
При отсутствии корректировки движения автомобиля, если машина движется на большой скорости, то он может оказаться в кювете. Впрочем, не только высокая скорость может оказаться угрозой курсовой устойчивости на поворотах, но и излишне резкое торможение автомобиля.
Регулировку курсовой устойчивости VSA производит с помощью обратной связи с автомобилем – за счет своих исполнительных механизмов система распределяет тормозное усилие автомобиля на каждое колесо индивидуально по алгоритму, который запрограммирован в процессоре системы. Рассматриваемая система имеет множество функций при распределении тормозного усилия на каждое из колес, но главная из них: сопротивление поперечной силе, которая без наличия противодействия развернула бы машину вокруг вертикальной оси, в сочетании с обеспечением плавности необходимого торможения.
Рассматриваемая система имеет множество функций при распределении тормозного усилия на каждое из колес, но главная из них: сопротивление поперечной силе, которая без наличия противодействия развернула бы машину вокруг вертикальной оси, в сочетании с обеспечением плавности необходимого торможения.
Система VSA: устройство и предназначение
Система VSA незаменима в случае, если на дороге возникает непредвиденное препятствие. В этом случае угроза курсовой устойчивости является еще большей, чем в случае запланированного поворота. Ведь в таком случае психологическое состояние водителя оставляет желать лучшего: только что он ехал по прямой в расслабленном состоянии, и вот внезапно он должен концентрироваться и принимать быстрое решение. Таким образом, какой-нибудь камень или нечто ему подобное могут послужить причиной аварии. К счастью, новейшие модели системы VSA позволяют машине с помощью, условно говоря, интеллектуальной реакции на действия водителя быстро сориентироваться и сохранить свою устойчивость.
Таким образом, какой-нибудь камень или нечто ему подобное могут послужить причиной аварии. К счастью, новейшие модели системы VSA позволяют машине с помощью, условно говоря, интеллектуальной реакции на действия водителя быстро сориентироваться и сохранить свою устойчивость.
Главные преимущества и недостатки системы
Устройство VSA очень важно для обеспечения благоприятных условий на дороге. С его помощью можно справиться даже с самыми непредвиденными ситуациями.
Еще раз перечислим достоинства VSA:
- Контроль за практически всеми процессами, происходящими в машине;
- Частота этого контроля, позволяющая видеть в динамике изменения в работе машины;
- Синтез различных информационных сигналов, поступающих в процессор;
- Возможность быстрой реакции системы на действия водителя для сохранения курсовой устойчивости, контролируемого системой автомобиля;
- Нахождение нужного баланса между тормозной силой, которая должна быть распределена на каждое колесо автомобиля;
- Возможность изменить крутящий момент двигателя с помощью регулировки импульса зажигания или впрыска горючего;
- Возможность отмены переключения передачи для регуляции тормозной силы;
- Угол, с помощью которого производится опережение зажигания, может быть изменен.

Система курсовой устойчивости — что это такое в машине
С 2010 года в Израиле, Америке и ЕС обязательным стало оснащать продаваемые машины системой курсовой устойчивости. Ее относят к одной из вспомогательных систем безопасности, поскольку позволяет предотвратить занос благодаря тому, что компьютерные программы контролируют момент вращения колеса.
Любой водитель еще со времен учебы в автошколе знает, что вписаться в поворот на высокой скорости практически невозможно. Если решиться на такой маневр, то автомобиль обязательно занесет, со всеми исходящими последствиями: выезд на встречную, опрокидывание, заезд в кювет, столкновение с преградами в виде дорожных знаков, других машин или ограждений.
Основная опасность, подстерегающая водителя на любом повороте, — центробежная сила. Она направлена в противоположную сторону от поворота. То есть, если вы на скорости захотите повернуть направо, то с большой долей вероятности можно утверждать, что автомобиль сместится влево от намеченной траектории. Таким образом, начинающий автовладелец должен научиться учитывать габариты своего авто и выбирать оптимальную траекторию поворота.
То есть, если вы на скорости захотите повернуть направо, то с большой долей вероятности можно утверждать, что автомобиль сместится влево от намеченной траектории. Таким образом, начинающий автовладелец должен научиться учитывать габариты своего авто и выбирать оптимальную траекторию поворота.
Система курсовой устойчивости как раз и придумана для того, чтобы контролировать перемещение машины в таких потенциально опасных ситуациях. Благодаря ей авто находится четко в рамках наиболее подходящей для данных обстоятельств траектории.
Устройство и принцип работы системы курсовой устойчивости
На сегодняшний день эта система, которую также называют системой динамической стабилизации, является наиболее эффективной системой безопасности. Если бы ею были оснащены все без исключения автомобили, то аварийность на дорогах удалось бы снизить на треть.
Первые разработки появились еще в конце 1980-х годов, а с 1995 года систему ESP (Electronic Stability Programme) стали устанавливать на большинстве серийных автомобилей Европы и Америки.
ESP состоит из:
- входных датчиков;
- блока управления;
- исполнительного устройства — блока гидравлики.
Входные датчики контролируют различные параметры: угол поворота руля, давление в тормозной системе, продольное и поперечное ускорение, скорость автомобиля, частоту вращения колес.
Блок управления анализирует все эти параметры. Программное обеспечение способно принимать решение буквально за 20 миллисекунд (1 миллисекунда — это тысячная доля секунды). И если возникает потенциально опасная ситуация блок подает команды на исполнительное устройство, которое способно:
- притормозить одно или все колеса за счет повышения давления в тормозной системе;
- изменить крутящий момент двигателя;
- повлиять на угол поворота колес;
- изменить степень демпфирования амортизаторов.
Кроме всего перечисленного, ESP способна взаимодействовать и с другими активными системами безопасности:
- антиблокировка тормозов;
- блокировка дифференциала;
- распределение тормозных усилий;
- антипробуксовка.

Самые распространенные ситуации, в которых система курсовой стабилизации вступает в работу. Если система замечает, что параметры движения отличаются от расчетных, решение принимается, исходя из ситуации. Например водитель, вписываясь в поворот, недостаточно повернул руль в нужную сторону, не сбросил скорость или не переключился на нужную передачу. В таком случае произойдет подтормаживание задних колес и одновременное изменение крутящего момента.
Если же водитель, наоборот, слишком сильно вывернул руль, произойдет подтормаживание переднего колеса, находящегося с наружной стороны (при повороте направо — переднего левого) и одновременное увеличение момента силы — за счет увеличения мощности удастся стабилизировать автомобиль и спасти его от заноса.
Стоит отметить, что опытные водители иногда отключают ESP, когда она мешает проявить им все свое умение, например хотят погонять по заснеженному маршруту с заносами и пробуксовками. Дело, как говорится, хозяйское. Кроме того, при выходе из заноса на заснеженной трассе нужно вывернуть руль в сторону заноса, затем резко повернуть в обратном направлении и поддать газу. Электроника же не даст это сделать. К счастью для таких лихачей ESP можно отключать.
Кроме того, при выходе из заноса на заснеженной трассе нужно вывернуть руль в сторону заноса, затем резко повернуть в обратном направлении и поддать газу. Электроника же не даст это сделать. К счастью для таких лихачей ESP можно отключать.
Мы бы не рекомендовали этого делать, поскольку система курсовой устойчивости довольно часто действительно спасает водителя от аварийных ситуаций.
Видео о системах курсовой устойчивости автомобилей VSC и EPS.
Загрузка…Поделиться в социальных сетях
Зачем нужна система курсовой устойчивости / Автобегиннер.ру
Главная цель системы курсовой устойчивости (ESC) — не позволить машине отклониться от намеченной траектории при проведении маневров. Ее первое название — управляющее устройство. Именно так она называлась, когда в конце пятидесятых годов была презентована компанией Daimler-Benz.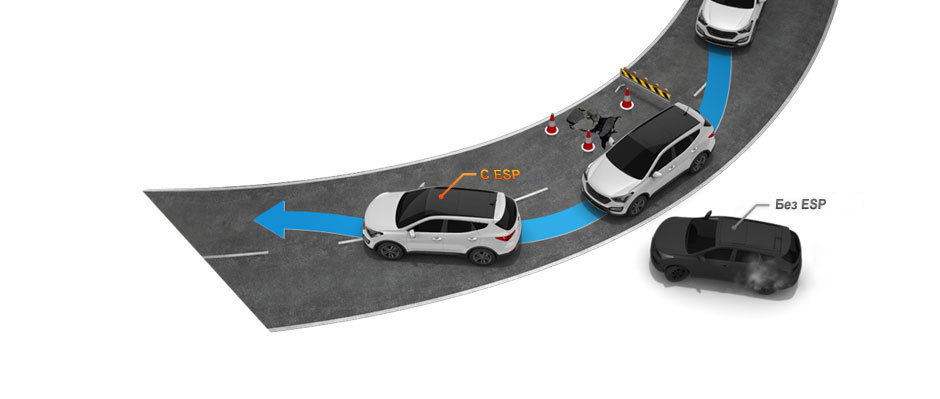 Однако система несколько раз модернизировалась, пока приобрела те качества, которыми она обладает сегодня.
Однако система несколько раз модернизировалась, пока приобрела те качества, которыми она обладает сегодня.
Как работает ESC
Системой стабилизации может быть оснащен практически любой современный автомобиль. Она работает в связке с ESP (система автоматической блокировки колес) и с управляющим блоком силового агрегата. ESC постоянно выполняет антиаварийные действия, хотя они и далеко не всегда могут ощущаться водителем.
Принцип действия системы заключается в том, что она выборочно притормаживает колеса автомобиля во время нестандартной ситуации на дороге. В результате этих манипуляций машина возвращается в начальное положение. Необходимость регулировки колес определяется автоматикой. Выбор колес, которые необходимо притормозить, совершает гидромодулятор, создающий давление в системе тормозов.
Происходит это следующим образом: блок управления мотора получает сигнал о необходимости сократить подачу горючего, а значит — и на снижение частоты вращения колесных пар. Таким образом авто не может уйти за намеченную траекторию поворота. Если автоматика выявит, что наметился слишком крутой поворот, она подтормозит определенное колесо и сократит крутящий момент мотора. При подтормаживании система взаимодействует с ABS. В результате этого происходит повышение давления в тормозной системе, после чего оно начинает поддерживаться на должном уровне, а затем давление сбрасывается.
Таким образом авто не может уйти за намеченную траекторию поворота. Если автоматика выявит, что наметился слишком крутой поворот, она подтормозит определенное колесо и сократит крутящий момент мотора. При подтормаживании система взаимодействует с ABS. В результате этого происходит повышение давления в тормозной системе, после чего оно начинает поддерживаться на должном уровне, а затем давление сбрасывается.
Стабилизирующая система может работать как при разгоне, так и во время торможения. Алгоритм выполняемых действий диктуется конкретной ситуацией. Основная задача ESC — вовремя выявить опасный момент. Автоматика все время соизмеряет действия водителя и управляемой им машины. Система активируется, когда действия человека отличаются от параметров движения авто.
Стабилизация движения машины происходит следующими способами:
- выборочное подтормаживание колес;
- регулирование частоты оборотов силового агрегата;
- регулирование поворота колес;
- изменение уровня демпфирования амортизаторной системы.

Частота оборотов мотора может быть изменена отменой перехода на другую передачу, изменением угла наклона дроссельной затворки или пропуском впрыска горючего. Если речь идет о полноприводном автомобиле, то изменения могут происходить путем распределения крутящего момента по осям.
Как устроена система
Стабилизирующая система состоит из нескольких блоков: ABS (не дает заблокировать тормозную систему), EBD (занимается распределением тормозной силы), EDS (блокирует механизм передачи мощности) и TCS (не дает колесам пробуксовывать). В систему включены несколько датчиков, ЭБУ и гидроблок.
Назначение датчиков — отслеживание параметров движения машины с последующей их передачей на ЭБУ. Также эта умная система способна отслеживать действия водителя. Для этого происходит задействование некоторых специальных датчиков. Отслеживанием параметров движения авто занимаются датчики давления, частоты оборотов колесных пар и угловой скорости автомобиля.
БУ получает сигналы от датчиков, на основе которых он, в свою очередь, начинает подавать сигналы следующим исполнительным устройствам:
- дросселям системы антиблокировки;
- дросселям противобуксовочной системы;
- тормозам;
- контрольным лампам.
Во время активации ЭБУ происходит ее взаимодействие с АКП и блоком, занимающимся управлением мотором. Кроме приема сигналов от этих узлов, управляющий блок еще создает команды для их элементов.
Как отключить ESC и когда это нужно делать
Иногда система стабилизации может создавать водителю определенные неудобства, и ее можно отключить. После этого машина продолжит двигаться в обычном режиме без поддержки электроники. Отключить систему можно с помощью специальной кнопки, которая размещена на приборной панели.
Отключение ESC может иметь смысл, если на авто установлены колеса с различными диаметрами или когда используется задняя докатка. Также использование системы теряет целесообразность во время езды по траве, песку и прочему бездорожью. Если машина застряла в снегу или в грязи, и ее приходится раскачивать, то в этом случае ESC тоже лучше отключить. То же самое нужно сделать и при тестировании автомобиля на стенде.
Также использование системы теряет целесообразность во время езды по траве, песку и прочему бездорожью. Если машина застряла в снегу или в грязи, и ее приходится раскачивать, то в этом случае ESC тоже лучше отключить. То же самое нужно сделать и при тестировании автомобиля на стенде.
Положительные и отрицательные стороны
К неоспоримым преимуществам ESC можно отнести:
- удерживание машины на заданной траектории;
- предотвращение возможной аварии при создании нестандартной ситуации;
- стабилизация движения транспортного средства с прицепом;
- предотвращение аварийных ситуаций.
Есть здесь и свои минусы, к которым, прежде всего, можно отнести невысокую эффективность системы на больших скоростях и при незначительном радиусе поворота. Также водители в качестве минусов приводят необходимость отключения системы в определенные моменты.
Некоторые автолюбители отмечают, что система будет только мешать, если на дороге во время движения возникнет реальная аварийная ситуация.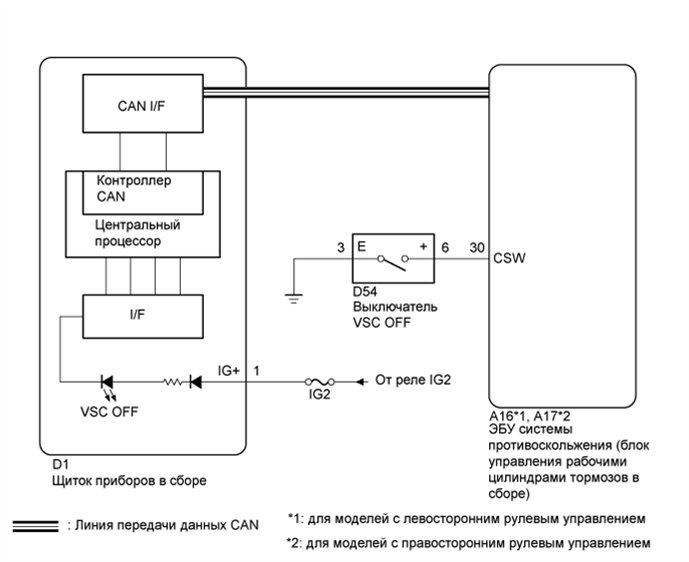 Например, машина попала в занос, и в этом случае приходится усиленно газовать, а система, наоборот, мешает этому, блокируя подачу горючего. И все же специалисты рекомендуют держать систему включенной. Особенно это касается неопытных водителей, так как им ее использование поможет избежать создания аварийного момента.
Например, машина попала в занос, и в этом случае приходится усиленно газовать, а система, наоборот, мешает этому, блокируя подачу горючего. И все же специалисты рекомендуют держать систему включенной. Особенно это касается неопытных водителей, так как им ее использование поможет избежать создания аварийного момента.
Кстати, если экстрим — это ваше все, не нужно думать, что система обязательно будет вам мешать хулиганить. ESC имеет несколько рабочих режимов, один из которых активируется, только когда наступит критический момент.
Заключение
Система курсовой устойчивости призвана помогать водителям при разрешении нестандартных ситуаций на дороге. Однако не нужно забывать, что возможности электроники ограничены, и управляющий транспортным средством человек не должен терять бдительности ни при каких обстоятельствах.
19 Курсовая устойчивость автомобиля
Свойство
автомобиля двигаться прямолинейно без
корректирующих
действий водитель
при неизменном положении рулевого
колеса, называется курсовой устойчивостью.
Нарушение курсовой устойчивости при прямолинейном движении автомобиля может быть из-за бокового ветра, ударов колес о неровности дороги, разных по величине тяговых или тормозных сил на колесах правой и левой стороны. Это может быть вызвано и неправильными приемами вождения (резким торможением или разгоном), а также техническими неисправностями (неправильная регулировка тормозных механизмов, прокол или разрыв шины и т.п.).
Часто предпосылкой потери курсовой устойчивости является скорость автомобиля, не соответствующая дорожным условиям, когда тяговая сила Рт на ведущих колесах приближается к силе сцепления Рсц и возможно их буксование. Условие отсутствие буксования для заднеприводного автомобиля
РТ<Рсц2
Сила тяги при ускоренном движении:
Поэтому
большая скорость сама по себе не может
нарушить курсовую устойчивость, но она
усиливает вероятность опасных
последствий.
Вместе с тем водитель имеет возможность уменьшить силу тяги, уменьшив подачу топлива. Поэтому начавшееся буксование колес может привести к аварии, только в результате неправильных или несвоевременных действий водителя. При движении автомобиля по неровной дороге со скоростью близкой к Vбукс. наезд колеса на выступ или впадину приводит к изменению вертикальной и соответственно касательной реакции на одном из ведущих колес автомобиля, что приводит к заносу
20 Устойчивость автомобиля при криволинейном движении
При криволинейном движении автомобиля поперечной силой, вызывающей его занос или опрокидывание, является центробежная сила. Для ее определения рассмотрим схему
Из
рисунка видно, что на участке 1-2
автомобиль движется прямолинейно и его
управляемые колеса находятся в нейтральном
положении. На участке 2-3 водитель
поворачивает рулевое колесо, и автомобиль
движется по кривой уменьшающегося
радиуса. На участке 3-4 управляемые колеса
остаются повернутыми на угол и,
а автомобиль движется по дуге постоянного
радиуса. На участке 4-5 водитель поворачивает
рулевое колесо в обратном направлении
и радиус траектории движения увеличивается.
На участке 5-6 управляемые колеса находятся
в нейтральном положении, и автомобиль
снова движется прямолинейно.
На участке 2-3 водитель
поворачивает рулевое колесо, и автомобиль
движется по кривой уменьшающегося
радиуса. На участке 3-4 управляемые колеса
остаются повернутыми на угол и,
а автомобиль движется по дуге постоянного
радиуса. На участке 4-5 водитель поворачивает
рулевое колесо в обратном направлении
и радиус траектории движения увеличивается.
На участке 5-6 управляемые колеса находятся
в нейтральном положении, и автомобиль
снова движется прямолинейно.
Суммарная боковая сила, действующая на автомобиль при криволинейном движении:
Сила Ру действует только во время поворота передних колес. При входе автомобиля в поворот скорость положительна, и сила Ру, складываясь с силой Ру, увеличивает опасность опрокидывания или заноса.
Как
видно из схем на рисунке 21, под действием
центробежной силы Ру, автомобиль
может опрокинуться относительно оси,
проходящей через центры контактов шин
наружных (по отношению к центру поворота)
колес с дорогой.
Для обеспечения безопасности движения автомобиля по кривым малого радиуса на дороге устраивают виражи, на которых проезжая часть и обочины имеют поперечный наклон к центру кривой.
Смстемы активной безопасности автомобиля | Автошкола в Сочи
СИСТЕМА КУРСОВОЙ УСТОЙЧИВОСТИ (ДИНАМИЧЕСКОЙ СТАБИЛИЗАЦИИ) (ESP)
Система курсовой устойчивости (другое наименование — система динамической стабилизации) предназначена для сохранения устойчивости и управляемости автомобиля за счет заблаговременного определения и устранения критической ситуации.
Что делать водителю, чтобы не вмешаться в работу системы? Что делать водителю, если такой системы в автомобиле нет? Как не потерять устойчивость при движении? Что делать, если устойчивость потеряна и автомобиль уходит в занос?
На эти и другие вопросы Вы узнаете ответы в нашей автошколе на предмете «Основы управления транспортным средством»
С 2011 года оснащение системой курсовой устойчивости новых легковых автомобилей является обязательным в США, Канаде, странах Евросоюза.
В зависимости от производителя различают следующие названия системы курсовой устойчивости:
- ESP (Electronic Stability Programme) на большинстве автомобилей в Европе и Америке;
- ESC (Electronic Stability Control) на автомобилях Honda, Kia, Hyundai;
- DSC (Dynamic Stability Control) на автомобилях BMW, Jaguar, Rover;
- DTSC (Dynamic Stability Traction Control) на автомобилях Volvo;
- VSA (Vehicle Stability Assist) на автомобилях Honda, Acura;
- VSC (Vehicle Stability Control) на автомобилях Toyota;
- VDC (Vehicle Dynamic Control) на автомобилях Infiniti, Nissan, Subaru.
Устройство и принцип действия системы курсовой устойчивости рассмотрены на примере самой распространенной системы ESP, которая выпускается с 1995 года.
Устройство системы курсовой устойчивости
Система курсовой устойчивости является системой активной безопасности более высокого уровня и включает антиблокировочную систему тормозов (ABS), систему распределения тормозных усилий (EBD), электронную блокировку дифференциала (EDS), антипробуксовочную систему (ASR).
Система курсовой устойчивости объединяет входные датчики, блок управления и гидравлический блок в качестве исполнительного устройства.
Входные датчики фиксируют конкретные параметры автомобиля и преобразуют их в электрические сигналы. С помощью датчиков система динамической стабилизации оценивает действия водителя и параметры движения автомобиля.
Используются в оценке действий водителя датчики угла поворота рулевого колеса, давления в тормозной системе, выключатель стоп-сигнала. Оценивают фактические параметры движения датчики частоты вращения колес, продольного и поперечного ускорения, угловой скорости автомобиля, давления в тормозной системе.
Блок управления системы ESP принимает сигналы от датчиков и формирует управляющие воздействия на исполнительные устройства подконтрольных систем активной безопасности:
- впускные и выпускные клапаны системы ABS;
- переключающие и клапаны высокого давления системы ASR;
- контрольные лампы системы ESP, системы ABS, тормозной системы.

В своей работе блок управления ESP взаимодействует с системой управления двигателем и автоматической коробки передач (через соответствующие блоки). Помимо приема сигналов от этих систем блок управления формирует управляющие воздействия на элементы системы управления двигателем и АКПП.
Для работы системы динамической стабилизации используется гидравлический блок системы ABS/ASR со всеми компонентами.
Принцип работы системы курсовой устойчивости
Определение наступления аварийной ситуации осуществляется путем сравнения действий водителя и параметров движения автомобиля. В случае, когда действия водителя (желаемые параметры движения) отличаются от фактических параметров движения автомобиля, система ESP распознает ситуацию как неконтролируемую и включается в работу.
Стабилизация движения автомобиля с помощью системы курсовой устойчивости может достигаться несколькими способами:
При недостаточной поворачиваемости система ESP предотвращает увод автомобиля наружу за пределы траектории поворота, подтормаживая заднее внутреннее колесо и изменяя крутящий момент двигателя.
При избыточной поворачиваемости занос автомобиля в повороте предотвращается подтормаживанием переднего наружного колеса и изменением крутящего момента двигателя.
Подтормаживание колес производится путем включения в работу соответствующих систем активной безопасности. Работа при этом носит циклический характер: увеличение давления, удержание давления и сброс давления в тормозной системе.
Изменение крутящего момента двигателя в системе ESP может осуществляться несколькими путями:
- изменением положения дроссельной заслонки;
- пропуском впрыска топлива;
- пропуском импульсов зажигания;
- изменением угла опережения зажигания;
- отменой переключения передачи в АКПП;
- перераспределением крутящего момента между осями (при наличии полного привода).
Система, объединяющая систему курсовой устойчивости, рулевое управление и подвеску носит название интегрированной системы управления динамикой автомобиля.
Система позволяет удерживать автомобиль в пределах заданной водителем траектории при различных режимах движения (разгоне, торможении, движении по прямой, в поворотах и при свободном качении).
Антиблокировочная система тормозов (ABS)
При экстренном торможении автомобиля возможна блокировка одного или нескольких колёс. В этом случае весь запас по сцеплению колеса с дорогой используется в продольном направлении. Заблокированное колесо перестает воспринимать боковые силы, удерживающие автомобиль на заданной траектории, и скользит по дорожному покрытию. Автомобиль теряет управляемость, и малейшее боковое усилие приводит его к заносу.
Вместе с тем, система АБС не лишена недостатка. На рыхлой поверхности (песок, гравий, снег) применение антиблокировочной системы увеличивает тормозной путь. На таком покрытии наименьший тормозной путь обеспечивается как раз при заблокированных колесах. При этом, перед каждым колесом формируется клин из грунта, который и приводит к сокращению тормозного пути. В современных конструкциях ABS этот недостаток почти устранен — система автоматически определяет характер поверхности и для каждой реализует свой алгоритм торможения.
В современных конструкциях ABS этот недостаток почти устранен — система автоматически определяет характер поверхности и для каждой реализует свой алгоритм торможения.
Антиблокировочная система тормозов (АБС, ABS, Antilock Brake System) предназначена предотвратить блокировку колес при торможении и сохранить управляемость автомобиля. Антиблокировочная система повышает эффективность торможения, уменьшает длину тормозного пути на сухом и мокром покрытии, обеспечивает лучшую маневренность на скользкой дороге, управляемость при экстренном торможении. В актив системы можно записать меньший и равномерный износ шин.
Система электронной блокировки дифференциала (ESD)Дифференциал ведущего моста автомобиля предназначен для перераспределения крутящего момента двигателя между правым и левым ведущими колесами. Плантетарный механизм дифференциала позволяет ведущим колесам, оставаясь под равномерной нагрузкой, вращаться с неодинаковой скоростью при прохождении автомобилем крутых поворотов. Это повышает устойчивость движения и защищает колесную резину от чрезмерного износа.
Это повышает устойчивость движения и защищает колесную резину от чрезмерного износа.
При движении автомобиля по сухой дороге в прямом направлении дифференциал работает как обычный понижающий редуктор и ведущие колеса вращаются с одинаковой скоростью.
Но наряду с положительными качествами дифференциал обладает и отрицательными: он является причиной значительного падения тягового усиления и потери устойчивости движения при страгивании автомобиля с места или при езде по скользкой дороге. В этих условиях ведущее колесо, которое имеет меньшее сцепление с дорогой, начинает пробуксовывать, т.е. вращаться быстрее всех остальных. Особенно отчетливо это проявляется, если автомобиль попал в грязь, в глубокий снег, в пески или на обледенелый участок дороги. Тогда при попытке начать движение одно колесо вращается, а другое стоит на месте. Но более опасна ситуация, когда на асфальтированной обледенелой дороге встречается поворот, подъем или уклон. В этом случае увеличение или уменьшение оборотов двигателя посредством педали газа могут привести к развороту автомобиля поперек движения или к его сносу в совершенно непредсказуемую сторону.
Механический дифференциал.
Чтобы в указанных тяжелых дорожных условиях обеспечить одновременное и равномерное вращение ведущих колес, на грузовых автомобилях применяют механическую блокировку дифференциала заднего ведущего моста. При механической блокировке происходит жесткая фиксация полуосей относительно главной шестерни планетарного механизма и колеса начинают вращаться с одинаковой скоростью. Однако механическая блокировка имеет три принципиальных недостатка: с ее помощью нельзя блокировать дифференциал переднего ведущего моста; конструктивное исполнение механической блокировки — достаточно сложное техническое мероприятие; но главное — в управление механической блокировкой невозможно ввести обратную связь от степени нагрузки каждого ведущего колеса в отдельности. Последнее обстоятельство есть следствие того, что после включения механической блокировки ведущие колеса не могут вращаться с различной скоростью, т.е. при включенной механической блокировке невозможно осуществить автоматическое перераспределение крутящего момента двигателя между правым и левым ведущими колесами.
Для того чтобы блокировка дифференциала была более эффективной, она должна быть мягкой, т.е. выравнивать скорости вращения ведущих колес не жесткой сцепкой полуосей, как при механической блокировке, а по мере нарастания разности тяговых усилий под ведущими колесами. Такую блокировку дифференциала можно реализовать с помощью автоматического притормаживания того ведущего колеса, которое за счет пробуксовки начинает вращаться быстрее всех остальных. При этом автоматика управления должна быть достаточно быстродействующей, чтобы не допускать излишнего затормаживания управляемого колеса. Этим требованиям в полной мере отвечает система автоматической антиблокировки колес (система ABS), дополненная функциями автоматической блокировки дифференциала (EDS).
Для реализации автоматической блокировки дифференциала с помощью системы ABS достаточно гидромагистраль «L», по которой подается тормозная жидкость от главного тормозного цилиндра (ГТЦ) через центральный исполнительный механизм (ЦИМ) к колесным тормозным цилиндрам (КГЦ), отключить от ГТЦ и через редукционный клапан (РК) подсоединить к автономному гидронагнетателю (АГН), а в ЭБУ-Т предусмотреть функцию торможения буксующего колеса не от ГТЦ, а от АГН.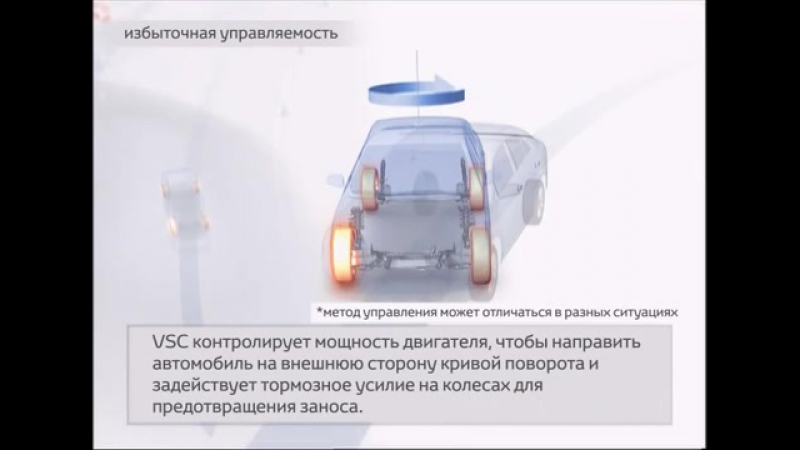 Тогда ГТЦ будет работать только в системе ABS, а АГН — только в системе EDS. Переключение тормозной системы с функций ABS на функции EDS реализуется с помощью поршня (ПВ) дополнительного гидроклапана (ДГК) с электроуправлением сигналом S от ЭБУ-Т.
Тогда ГТЦ будет работать только в системе ABS, а АГН — только в системе EDS. Переключение тормозной системы с функций ABS на функции EDS реализуется с помощью поршня (ПВ) дополнительного гидроклапана (ДГК) с электроуправлением сигналом S от ЭБУ-Т.
В реальных вариантах исполнения автономный гидронагнетатель АГН одновременно является и гидроусилителем тормозов. В этом случае в систему добавляется еще один дополнительный электрогидрок-лапан (ДГК) для переключения гидронагнетателя АГН. Давление а АГН поддерживается постоянным вначале за счет напора на упругую диафрагму (УД) со стороны пневморес-сивера (ПР), наполненного азотом под высоким давлением (не менее 160 бар). Когда тормозной жидкости в АГН становится мало, упругий виток монометрического выключателя (ММК) сворачивается, контакты KB включают электродвигатель (ЭД) гидронасоса высокого давления (НВД) и начинается перекачка тормозной жидкости из резервного бачка (РБ) в полость АГН. Когда давление в АГН поднимается до нормы, упругий виток ММК снова распрямляется и контакты KB выключают электродвигатель наноса.
В результате работы системы EDS возникает реактивный момент в дифференциале, который по проявлению схож с механической блокировкой. При этом колесо, имеющее лучшее сцепление с дорогой, способствует увеличению тягового усиления автомобиля. Наличие электронной блокировки дифференциала увеличивает тяговое усилие в 5-6 раз.
Материалы с сайта http://systemsauto.ru/active/esp.html
Рено Логан обзор и описание модели, обзор автомобиля Renault Logan
КОМФОРТНЫЙ
Багажное отделение и складные сидения
Новый Renault Logan имеет невероятно вместительный багажник. Только представьте, — 510 л. Это рекордный показатель в сегменте доступных автомобилей. Задние сидения легко складываются, что позволяет увеличить багажное пространство. Это на тот случай, если вам потребуется перевезти габаритный груз.
Вместительный салон
Еще одна отличительная особенность нового Renault Logan, что выгодно отличает модель от конкурентов, — комфортный и вместительный салон. Стоит ли напоминать, что именно Renault Logan на протяжении многих лет является в своем сегменте неким эталоном по ширине на уровне локтей как в передней (1417 мм), так и в задней (1434 мм) частях салона
Очень просторно будет и пассажирам на заднем ряду. Там с комфортом смогут разместиться три взрослых человека. А что касается перевозки маленьких пассажиров, то благодаря специальным креплениям на заднем сидении нового Renault Logan вы сможете установить три детских сиденья.
Вещевые отделения
Обратите внимания, в салоне прибавилось места для хранения вещей. Перчаточный ящик теперь имеет объем 5,7 л, а в дополнение к карманам в передних дверях (для бутылок объемом 1,5 л) появились карманы и в задних дверях (для бутылок 0,5 л). Над центральной консолью теперь есть вещевое отделение.*
*Обратите внимание, что доступность оборудования зависит от выбранной вами комплектации.
Активная безопасность (ESP и ABS)
За рулем нового Renault Logan вы будете чувствовать себя уверенно и спокойно, потому что автомобиль оборудован самыми современными системами безопасности. Причем некоторые стали доступны только в новом автомобиле.
Причем некоторые стали доступны только в новом автомобиле.
Так, на новом Renault Logan 2016 и 2017 впервые появляется система стабилизации курсовой устойчивости (ESP). Когда нужно резко сманеврировать перед препятствием или на крутых поворотах, особенно когда скользко и плохое сцепление с дорогой, система ESP обеспечивает устойчивость автомобиля.
Антиблокировочная система тормозов (ABS) теперь работает в паре с системой экстренного торможения, которая срабатывает в нужный момент. Автомобиль теперь оснащен дневными ходовыми огнями, которые улучшают видимость в любое время суток. И еще важная особенность — включаются они автоматически, вместе с двигателем.*
*Доступность оборудования зависит от выбранной вами комплектации.
Пассивная безопасность
Инженеры-конструкторы компании Renault при разработке этого автомобиля использовали самые современные наработки в области защиты пассажиров. Для вашей безопасности – передние и боковые подушки водителя и пассажира. Передние ремни безопасности дополнены ограничителями усилий, это защитит грудную клетку при ударе в случае ДТП. Кстати, если вдруг вы забыли пристегнуться, то звуковой сигнал вам напомнит об этом.
Передние ремни безопасности дополнены ограничителями усилий, это защитит грудную клетку при ударе в случае ДТП. Кстати, если вдруг вы забыли пристегнуться, то звуковой сигнал вам напомнит об этом.
Кузов Renault Logan имеет запрограммированные зоны деформации. Форма, толщина и жесткость бампера и капота спроектированы для оптимального поглощения силы ударов. Это значительно увеличивает защиту пассажиров и пешеходов в случае аварий.
СОВРЕМЕННЫЙ
Внешний дизайн
Renault Logan 2016 и 2017 изменился до неузнаваемости! Автомобиль теперь выполнен в новой дизайн-стилистике компании Renault. Передняя часть кузова с крупной эмблемой и массивной решеткой, классические формы седана, четкие горизонтальные линии и ярко выделенные колесные арки создают современный и динамичный образ.
Еще более привлекательный изнутри
Интерьер нового Logan — это шаг вперед по сравнению с первым поколением модели. Продуманная эргономика и новые детали отделки создают уникальное ощущение комфорта.
Команда дизайнеров Renault сделала акцент на качестве отделочных материалов. В автомобиле представлена современная приборная панель с хромированной окантовкой воздуховодов. Хромированная эмблема на руле гармонирует с отделкой хромом рычага переключения передач. Для нового Renault Logan предлагаются новые интересные обивки, а также кожаная оплетка рулевого колеса и рычага переключения передач.
Мультимедийная система Media NAV
Мультимедийная система MEDIA NAV включает в себя все необходимое оборудование для комфортного вождения.
Эта многофункциональная система позволяет управлять радио, прослушивать музыку со смартфона или плеера по протоколу Bluetooth®, использовать навигацию по 2D- и 3D-картам и общаться по телефону, не отрывая от вождения автомобиля.*
*Доступность оборудования зависит от выбранной вами комплектации.
Аудиосистема
В зависимости от версии Renault Logan может быть оборудован аудиосистемой 2DIN *.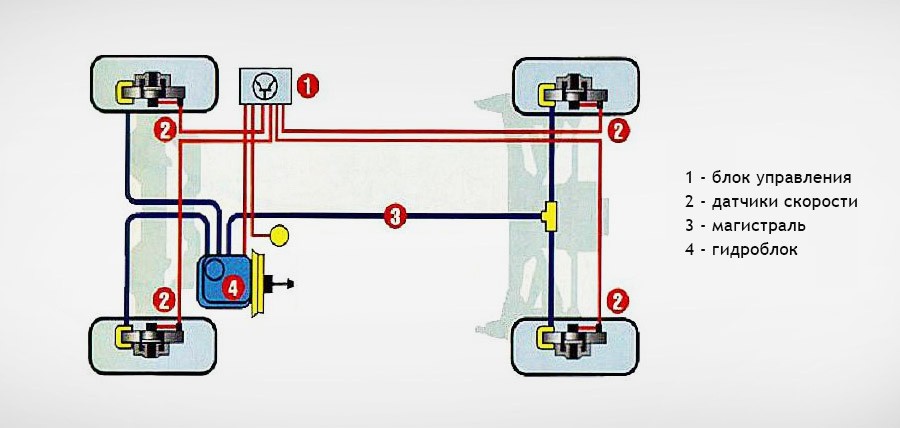
- Улучшенное звучание — 4 динамика, усовершенствованная обработка звука
- Современные возможности подключения устройств: USB, Jack, Bluetooth®, аудиопоток
- Легкость в управлении: возможность управления магнитолой с помощью подрулевого джойстика
- Привлекательный внешний вид: аудиосистема органично вписана в центральную панель
Климат-контроль
Новый Renault Logan оснащен теперь круиз-контролем с ограничителем скорости. С помощью специальной кнопки на руле вы сможете легко и удобно управлять этой системой.
*Доступность оборудования зависит от выбранной вами комплектации.
Задний парктроник
В некоторых комплектациях Renault Logan 2016 и 2017 доступны задние парковочные датчики. Установленные на заднем бампере они подают водителю звуковой сигнал, когда сзади есть препятствие. Использовать эту функцию очень удобно, тем более что она автоматически начинает работать, стоит вам только включить заднюю передачу.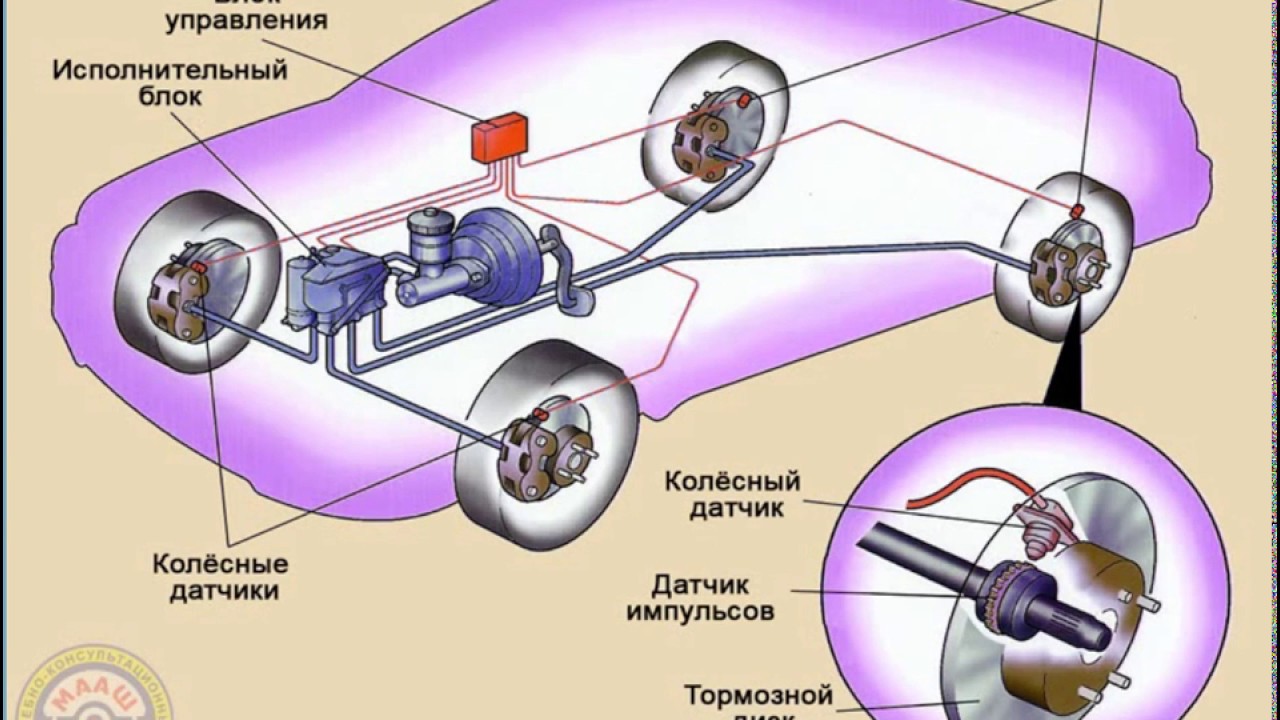 Но при необходимости вы можете отключить парктроник.
Но при необходимости вы можете отключить парктроник.
*Доступность оборудования зависит от выбранной вами комплектации.
АДАПТАЦИЯ ДЛЯ РОССИИ
Новый Renault Logan
Renault Logan успешно продается во многих странах, где и климатические условия, и дорожное покрытие очень отличается. Поэтому изначально требования к его техническим характеристикам были достаточно высокими.
Что касается нашей страны, то в России Renault Logan продается уже много лет. И все это время автомобиль постоянно усовершенствовался и дорабатывался. Конструкторы компании Renault максимально адаптируют автомобиль для наших климатических условий. Компания Renault по праву гордится достижениями своих инженеров, а сотни тысяч водителей Logan ценят его надежность в самых сложных ситуациях.
Адаптация к дорожным условиям
Renault Logan полностью адаптирован для российских климатических и дорожных условий. Вот лишь некоторые особенности модели.
- Защита двигателя стальными листами
- Защита топливопроводов пластиковыми листами
- Антигравийное покрытие днища
- Большой дорожный просвет — 155 мм под нагрузкой
Усовершенствованная подвеска
Про мягкую, энергоемкую и непробиваемую подвеску Renault Logan ходят легенды! И это, без сомнения, — одно из главных преимуществ автомобилей французской марки. Что касается нового Renault Logan 2016 и 2017, то он не только сохранил все лучшие характеристики предшественника, но и стал еще более надежным. Так, на новом автомобилей увеличена жесткость пружин подвески и изменен стабилизатор поперечной устойчивости.
Адаптация к климатическим условиям
Новый Renault Logan идеально адаптирован к российским климатическим условиям. Теперь на Renault Logan появилась очень полезная функция – обогрев лобового стекла. Специально для непредсказуемых русских зим конструкторы Renault предусмотрели:
- Легкий запуск двигателя в холодном климате
- Калибровка блока управления двигателем к качеству топлива и к морозам
- Адаптация технических жидкостей к эксплуатации при низких температурах
- Uенератор повышенной мощности
- АКБ увеличенной емкости
- Обогрев зеркал и передних сидений
*Доступность оборудования зависит от выбранной вами комплектации.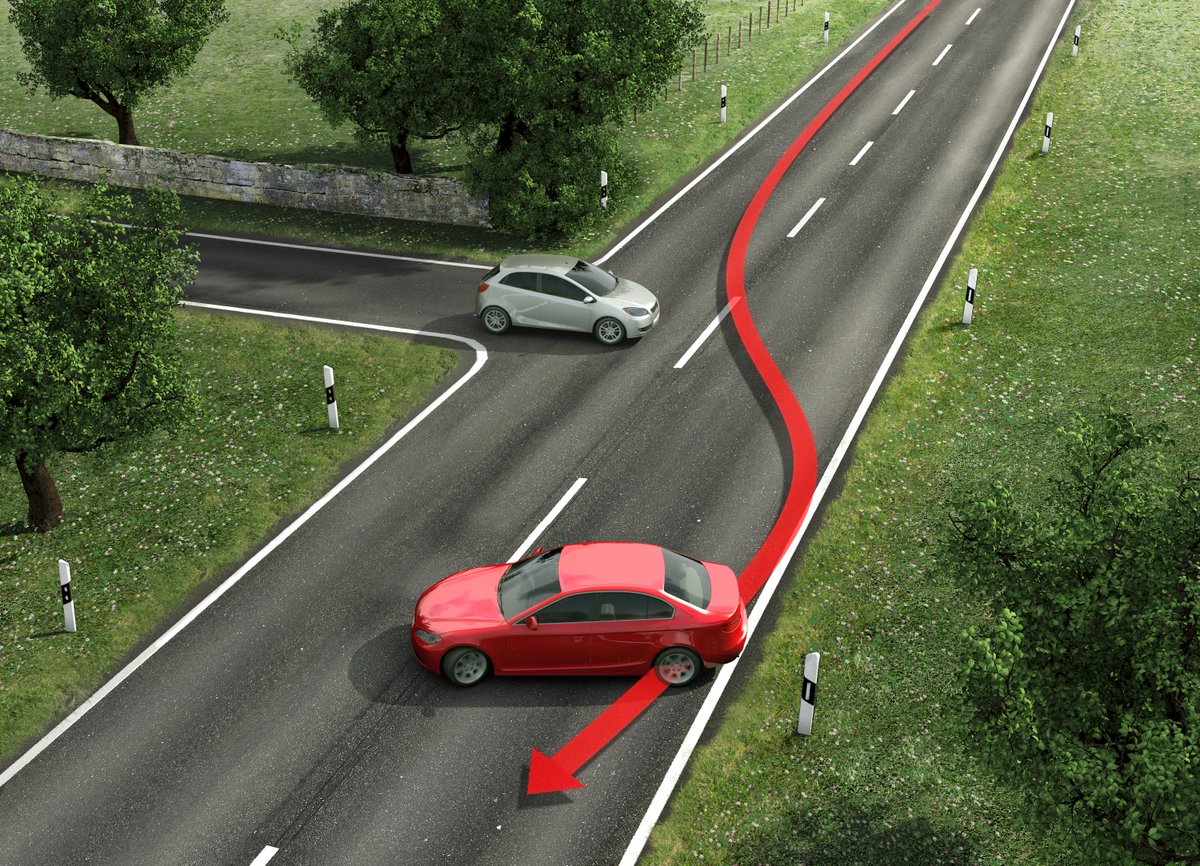
Новые настройки двигателей
Renault Logan второго поколения доступен с двумя типами бензиновых двигателей, которые теперь полностью соответствуют стандартам Евро-5:
- 8-клапанный, 1,6 л, 82 л.с. в паре с 5-ступенчатой механической коробкой передач (за счет измененных настроек крутящий момент этого двигателя увеличился с 124 Нм до 134 Нм и достигается при более низких оборотах в 2800 об/мин, что позволило улучшить динамические характеристики автомобиля)
- 16-клапанный, 1,6 л, 102 л.с. в паре с 5-ступенчатой механической коробкой передач
Шумоизоляция
Большое внимание при разработке модели уделили и улучшению шумоизоляции салона.
Новая форма кузова уже позволила устранить некоторые резонансы, но инженеры Renault на этом не остановились. Вы сразу почувствуете, что при движении в салоне стало значительно тиши.
- Увеличение площади поверхности звукоизоляционных компонентов между моторным отсеком и салоном
- Снижение шума от потока воздуха благодаря дополнительной аэродинамической звукоизоляции в дверных проемах
- Обновление выхлопной системы
- Изменение формы воздухозаборника
Адаптивный усилитель рулевого управления
Какой бы скоростной режим вы не выбрали, с усилителем рулевого управления вы будете чувствовать себя значительно комформнее.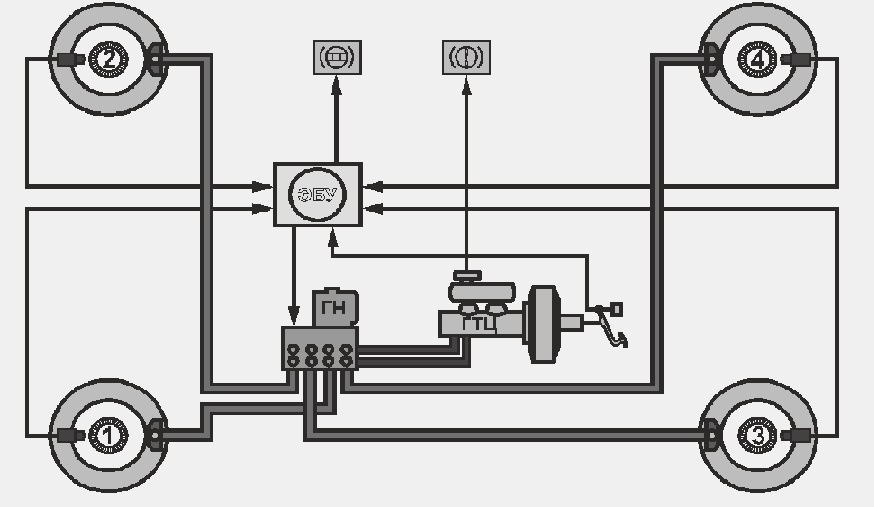 Так, для повышения устойчивости на высоких скоростях в затяжных поворотах коэффициент усиления уменьшается, а необходимое для поворота рулевого колеса усилие — увеличивается. А для повышения маневренности, например при парковке, коэффициент усиления наоборот увеличивается, обеспечивая большие углы поворота.
Так, для повышения устойчивости на высоких скоростях в затяжных поворотах коэффициент усиления уменьшается, а необходимое для поворота рулевого колеса усилие — увеличивается. А для повышения маневренности, например при парковке, коэффициент усиления наоборот увеличивается, обеспечивая большие углы поворота.
Мультимедийная система
Навигатор
Новый Renault Logan оснащен мультимедийной системой с сенсорным 7-дюймовым экраном и удобным простым интерфейсом. Вы можете пользоваться навигацией в режиме 2D или 3D, а также слушать радио или музыкальные файлы с внешних носителей (Bluetooth). Также доступна опция звонки в режиме «свободные руки».
Повышение курсовой устойчивости автомобиля при прохождении поворотов на основе управления моментом рыскания
Дугофф, Х., Фанчер, П.С. и Сегель, Л., 1970, «Анализ тяговых свойств шин и их влияния на динамические характеристики автомобиля», SAE 700377.
Фурукава Ю. и Масато А., 1997, «Усовершенствованная система управления шасси для управления транспортными средствами и активной безопасности», Vehicle System Dynamics 28, стр. 59–86.
и Масато А., 1997, «Усовершенствованная система управления шасси для управления транспортными средствами и активной безопасности», Vehicle System Dynamics 28, стр. 59–86.
Гиллеспи, Т.D., 1992, Основы динамики транспортного средства , SAE International, стр. 7–14, стр. 195–208.
Хиб, Г. и Ван Зантен, А.Т., «Системный подход к динамическому управлению транспортным средством», SAE 885107.
Икусима, Ю. и Савасе, К., 1995, «Исследование эффектов активного контроля момента рыскания », SAE 950303.
Ким, С.И. и Чанг, HW, 1996,« Алгоритм системы контроля тяги с помощью контроля давления в тормозной системе », Proc.Ежегодного весеннего собрания KSME , Vol. А, стр. 447–452.
Google Scholar
Койбучи, К., Ямамото, М., Фукада, Ю. и Инагаки, С., 1996, «Контроль устойчивости транспортного средства при прохождении поворотов с помощью активного торможения», SAE 960487.
Шибахата Ю., Шимада, К., Томари, Т., 1993, «Улучшение маневренности транспортного средства за счет прямого управления моментом рыскания», Vehicle System Dynamics 22, стр. 465–481.
Артикул Google Scholar
Сонг, Дж. Б. и Ча, С. Х., 1999, «Разработка алгоритма управления вращением для обеспечения устойчивости автомобиля на поворотах», транзакций на KSAE , Vol. 7, № 3, с. 248–260.
Google Scholar
Сонг, Дж. Б. Ким, Б. К. и Шин, Д. К., 1999, «Разработка логики управления проскальзыванием TCS на основе управления дроссельной заслонкой двигателя», KSME International Journal , Vol.13, № 1. С. 74–81.
Google Scholar
Ван Зантен, А.Т., Эрхард, Р., Ландесфейнд, К., и Пфафф, Г., 1998, «Разработка и перспективы систем VDC», SAE 980235.
Вонг, JY, 1993, Теория наземных транспортных средств , 2-е изд. , John Wiley & Sons, стр. 285–298.
, John Wiley & Sons, стр. 285–298.
Ясуи, Ю., Тозу, К., Хаттори, Н. и Сугисава, М., 1996, «Повышение курсовой устойчивости автомобиля для переходных маневров рулевого управления с использованием активного контроля торможения», SAE 960485.
(PDF) Контроль курсовой устойчивости транспортного средства с использованием бифуркационного анализа равновесия скорости рыскания
International Journal of Automotive Engineering Vol. 6, номер 1, март 2016 г.
Контроль курсовой устойчивости транспортного средства с использованием бифуркации
Анализ равновесия скорости рыскания
M.H. ШоджаиФард, С. Эбрахими Неджад М. Масджеди
1- профессор факультета машиностроения Иранского университета науки и технологий, Тегеран, Иран 2- Факультет
Автомобильная инженерия, Иранский университет науки и технологий, Тегеран, Иран
Abstract
В этой статье была исследована устойчивость автомобиля на поворотах и стабилизация тормозов с помощью бифуркационного анализа
.Для вывода определяющих уравнений движения была разработана модель нелинейного четырехколесного транспортного средства
с двумя степенями свободы. Используя программный пакет продолжения MatCont, был проведен анализ устойчивости
, основанный на анализе фазовой плоскости и бифуркации равновесия, и был предложен оптимальный контроллер
. Наконец, моделирование было выполнено в программном обеспечении Matlab-Simulink с учетом синусоидального сигнала
с вводом угла поворота при задержке, а эффективность предложенного контроллера на вышеупомянутой модели
была подтверждена с помощью модели Карсима.
Ключевые слова: компенсация момента рыскания, фазовая плоскость, анализ бифуркаций, оптимальное управление
1. Введение
Значительные исследования и последовательные
разработки были проведены для улучшения управляемости и устойчивости транспортного средства
. Среди них контроль рысканья
доказал свое влияние на улучшение управляемости и устойчивости
обычных и электрических транспортных средств в тяжелых условиях движения
[1,2].Необходимость в
развивающемся управлении моментом рыскания может быть замечена с помощью
, исследующего неопытность водителя в управлении динамикой направления
транспортного средства во время критических маневров
. Например, в маневре поворота с высоким поперечным ускорением
, когда поперечные силы шины равны
на пределе сцепления с дорогой, поперечная скорость транспортного средства
увеличивается, а мощность шины
, создающая момент рыскания, значительно уменьшено
из-за насыщения поперечной силы шины.Уменьшение на
генерирующего момента рыскания может вызвать неустойчивое движение
транспортного средства, то есть раскручивание.
Таким образом, обеспечение необходимого компенсирующего момента рыскания
восстановит устойчивость автомобиля.
Для управления динамикой транспортного средства, управление моментом рыскания
изучается как подход к управлению направленным движением
транспортного средства во время жестких маневров вождения
.Для достижения этой цели требуется стратегия управления
на основе сигналов обратной связи по динамике транспортного средства, а также система срабатывания
. В соответствии с существующей технологией
, характеристики исполнительных механизмов управления динамикой транспортного средства
основаны на
управлении тормозной силой на каждом колесе
, индивидуально известном как дифференциальное торможение, которое может быть достигнуто
с использованием основных частей общий антиблокировочный замок
тормозных систем [3,4].
В общем, разработка требуемой системы управления
на основе измеренных или оцененных переменных для достижения желаемой производительности
является привлекательной областью исследований
. Многие исследователи за последнее десятилетие
сообщили о прямом управлении моментом рыскания как один из наиболее эффективных методов
, который может значительно восстановить устойчивость и управляемость автомобиля. Они
предложили различные методы управления, в том числе,
оптимальное управление [5,6], нечеткое логическое управление [7],
управление моментом рыскания [8], внутреннее управление моделью [9],
multi -объективное управление [10], линейно-квадратичный регулятор
(LQR) и скользящее управление [11] и т. д.
В данной статье рассматривается оптимальная конструкция контроллера
для нелинейной модели направленной динамики транспортного средства с двумя степенями свободы (2–
DOF) с учетом поперечной скорости транспортного средства
и скорости рыскания в качестве переменных обратной связи по состоянию
. Основное внимание в статье уделяется разработке закона управления с обратной связью состояния
на основе областей устойчивости
, полученных из бифуркационных диаграмм. Таким образом, этот документ
организован следующим образом.В разделе 2, чтобы
оценить динамическое поведение транспортного средства, строится нелинейная модель транспортного средства
с 2 степенями свободы. Затем,
, программный пакет продолжения MatCont используется в разделе 3
для выполнения анализа стабильности на основе анализа фазовой плоскости
и бифуркации равновесий, а
областей устойчивости определяются для различных скоростей транспортного средства
. Затем задача управления формулируется в разделе 4
, учитывая линейную модель транспортного средства с 2 степенями свободы
* 1 2, 2
* Ответственный автор
Направленная устойчивость — обзор
7.5 Летные качества и управляемость
Как и в случае с продольной устойчивостью, характеристики поперечной устойчивости самолета критически важны для определения летных качеств и управляемости, и нет сомнений в том, что они должны быть правильными. Традиционно акцент на полет в поперечном направлении и управляемость делался гораздо меньше, чем на продольный полет и управляемость. В отличие от качества полета и управляемости в продольном направлении, характеристики полета в поперечном направлении и управляемости обычно существенно не меняются в зависимости от условий полета, особенно в контексте моделирования малых возмущений.Таким образом, после того как они зафиксированы аэродинамической конструкцией планера, они имеют тенденцию оставаться более или менее постоянными независимо от условий полета. Любые серьезные отклонения в боковом направлении от номинально малых возмущений дифферента, вероятно, будут временными под полным контролем пилота и, следовательно, вряд ли вызовут серьезные проблемы с управлением. Однако это не обязательно является безопасным предположением при рассмотрении самолета с высокими техническими характеристиками, тема которого выходит за рамки настоящего обсуждения.
В работе с качествами постоянно встречается тема, что краткосрочная динамика должным образом контролируется дизайном. Типичные частоты, участвующие в краткосрочной динамике, аналогичны частотам пилот-сигнала человека, и их непреднамеренное несовпадение — верный рецепт потенциальных проблем с управлением. Таким образом, по причинам, аналогичным тем, которые обсуждались более подробно в разделе 6.5, относящемся к продольной динамике, поэтому не менее важно, чтобы режимы короткопериодической устойчивости в поперечном направлении находились под надлежащим контролем.Это может быть истолковано как означающее, что демпфирование как режима оседания валка, так и режима холостого крена должно быть адекватным.
Режим оседания крена кажется пилоту задержкой в реакции на управление и, очевидно, если постоянная времени становится слишком большой, реакция крена на управление становится слишком вялой. Большая постоянная времени режима крена является прямым результатом низкой устойчивости крена, хотя режим обычно стабилен, как описано в разделе 7.2.1. Как правило, приемлемые уровни устойчивости режима крена приводят к постоянной времени или запаздыванию реакции на крен, которая почти незаметна для пилота.Однако довольно часто встречаются летательные аппараты с недостаточным демпфированием в режиме крена, но редко встречаются воздушные суда с избыточным демпфированием.
Спиральный режим, будучи долгопериодическим режимом, обычно не оказывает значительного влияния на краткосрочное управление. Когда он стабилен и его постоянная времени достаточно велика, он практически не влияет на летные качества и управляемость, но когда он нестабилен, это проявляется как проблема дифферента, поскольку самолет постоянно пытается отклониться в сторону.Когда его постоянная времени мала, режим становится более нестабильным, и скорость расхождения увеличивается с соответствующим увеличением рабочей нагрузки пилота. Поскольку режим обычно развивается очень медленно, связанные с ним сигналы движения могут быть незаметны для пилота. Таким образом, опасная ситуация может легко возникнуть, если внешние визуальные сигналы, доступные пилоту, плохие или отсутствуют вообще, например, в условиях полета по метеорологическим условиям по приборам (IMC). Нередко неопытные пилоты теряют ориентацию в таких условиях с неизбежным исходом! Следовательно, общее требование состоит в том, чтобы спиральный режим был устойчивым; однако, поскольку на многих самолетах этого трудно достичь, в нестабильном состоянии постоянная времени должна быть больше определенного минимума.
Поскольку голландский режим крена является короткопериодическим режимом и является направленным эквивалентом продольного короткопериодического режима, его важность для управляемости также имеет решающее значение. Как правило, важно, чтобы режим холостого крена был стабильным и чтобы его демпфирование превышало определенный минимум. Столь же жесткие ограничения накладываются на допустимый диапазон комбинаций частоты и затухания. Однако допустимый уровень демпфирования ниже, чем у продольной короткопериодической моды.Возможно, это удобно, но более вероятно, что это является результатом конфликта конструкции со спиральной модой, которая не должна иметь более чем ограниченную степень нестабильности.
[PDF] курсовая устойчивость автомобиля — Скачать бесплатно PDF
1 Курсовая устойчивость автомобиля Prof. R.G. Лонгория Кафедра машиностроения Техасский университет в Ост …
Краткое описаниеВведение
Одноосное транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Курсовая устойчивость транспортного средства Проф.R.G. Лонгория Кафедра машиностроения Техасский университет в Остине
7 апреля 2015 г.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Ссылки
Схема
Введение
Одноосное транспортное средство
Боковое скольжение и сила
1
Введение
2
Одноосное транспортное средство
3
Боковое скольжение и сила
4
Направленная устойчивость Модель Рокарда Модель велосипеда Направленная устойчивость при устойчивом повороте Комбинированные силы на колесах
5
Каталожные номера
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Направленная устойчивость
Каталожные номера
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Справочная информация
Справочная информация режим наземного транспортного средства относится к как ходовая часть (колеса, гусеницы и т. д.) управляются и контролируются для достижения мобильности, так что мобильность может быть достигнута надежно. Все больше транспортных средств оснащаются элементами управления и различными уровнями автономности. Необходимо учитывать курсовую устойчивость, потому что наземная техника не движется просто по прямой. Кинематические модели движения используются для описания основных поворотов и рулевого управления транспортного средства, но предполагают отсутствие бокового проскальзывания колес. Следует понимать, когда ограничение бокового скольжения является разумным и когда следует применять модели динамики и скольжения для более полного понимания характеристик устойчивости и управляемости транспортного средства.Обсуждаемые ниже концепции относятся к устойчивости транспортного средства для широкого диапазона типов и размеров транспортных средств, но должно быть ясно, что конкретное определяющее поведение, особенно для сил, возникающих на стыке ходовой части и местности, имеет значительную изменчивость и неопределенность.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Устойчивость по направлению
Ссылки
«Брызги в шинах» В кадре из Bourne Борн спрашивает Мари: «Ты позаботишься об этой машине?»…. шины чувствовали себя немного забрызганными по дороге сюда «.
Поскольку он готовился ускользнуть от полиции, Борну, вероятно, нужно было понять, как он может довести Mini Cooper до пределов управляемости и производительности без потери контроля. ME 379M / 397 Cyber Vehicle Systems (Longoria)
Совершенно очевидно, что «брызги» не имеют ничего общего с тем, как вода вылетает из машины.
О чем он говорил?
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Каталожные номера
Рассмотрим одноосное динамическое транспортное средство без бокового скольжения. U, с незначительным сопротивлением качению в колесах и в точке A (шарнир с низким коэффициентом трения, ролики и т. Д.).
Эта модель должна быть знакомой, напоминая ранее изученные кинематические модели. Однако сейчас учитываются силы, поскольку могут иметь значение динамические эффекты. Начните с рассмотрения колес, которые катятся без продольного или поперечного скольжения.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Ссылки
Некоторые комментарии к одноосной модели
1
В отличие от двухмерной кинематической модели, рассмотренной ранее, теперь мы исследуем динамические уравнения.Двухмерная модель транспортного средства включает в себя уравнения динамики продольного (x), поперечного (y) и рысканого (ψ) направления, при условии отсутствия вертикального движения, крена или тангажа.2
Мы рассматриваем период, в течение которого поступательная скорость транспортного средства по существу постоянна, поэтому уравнение продольной динамики принимается как v ≈ x ≈ 0. Это упрощает исследование поперечной динамики и динамики рыскания при постоянной скорости движения. U. Это обычное допущение при оценке курсовой устойчивости автомобиля.
3
Эта первая динамическая модель предполагает отсутствие бокового проскальзывания колес, что означает наличие ограничивающей силы на границе раздела колесо-земля, которая предотвращает смещение колеса вне плоскости.Позже мы сможем оценить это предположение и смоделировать боковое скольжение.
Если бы Борн управлял этим транспортным средством, он мог бы сказать, что шины были довольно «жесткими», хотя ему может не понравиться то, что оно остается на земле (не может спускаться по ступенькам) и не имеет рулевого управления!
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Да, этот автомобиль похож на тележку для покупок
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Направление устойчивости
Ссылки
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Устойчивость одноосного транспортного средства
Рассмотрим два случая для этого транспортного средства. — в схематическом виде ниже.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Ссылки
Схема
Введение
Одноосный автомобиль
Боковое скольжение и сила
Направленная устойчивость
Ссылки
Одноосный автомобиль -фиксированная рама Динамические уравнения для транспортного средства взяты из общих уравнений Эйлера для твердого тела, выраженных в неподвижной раме. Обрежьте уравнения следующим образом: 1
Нет движения по вертикали, vz = 0, крен, ωy = 0 или тангаж, ωx = 0
2
Предположим, что vx = U является постоянным, поэтому на самом деле не нужно x уравнение
3
Отсутствие бокового скольжения на задней оси: vaxle = vy — l2 ωz = 0 (уравнение ограничения), Fa — сила ограничения
p˙x = mv˙ x = Fx — ωy pz + ωz py = Fx — ωy mvz + ωz mvy = 0 p˙y = mv˙ y = Fy — ωz px + ωx pz = Fy — ωz mvx + ω vxmz ˙hz = Iz ω˙ z = Tz — ωx hy + ωy hx = Tz — ω ω ω ω y + y Ix xx Iy
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Схема
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Одноосная модель (продолжение) Из фиксированного на теле уравнения для vy, mv˙ y = Fay — ωz mU ⇒ l2 Fay = ml2 v˙ y + ωz ml2 U, которое подставляется в уравнение рыскания, Iz ω˙ z = −l2 Fy = −ml2 v ˙ y — ωz ml2 U Продифференцируем уравнение связи: v˙ y = l2 ω˙ z и подставим вместо v˙ y, Iz ω˙ z = −ml22 ω˙ z — ml2 U ωz Тогда уравнение скорости рыскания принимает вид τ ω ˙ z + ωz = 0. где скорость U отображается в параметре постоянной времени системы τ = (Iz + ml22) / ml2 U, а не в качестве входных данных. ME 379M / 397 Cyber Vehicle Systems (Longoria)
Каталожные номера
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Каталожные номера
Одноосная модель (продолжение.) Характеристическое уравнение для этой системы простое, τ s + 1 = 0, и единственный корень (собственное значение) для этой системы, s = −1 / τ. Эта система всегда стабильна1, если транспортное средство не движется назад, U
1 Чтобы понять, как оценивается стабильность, просмотрите приложение. Этот материал поможет понять, как оценивается устойчивость систем автомобиля, представленных на остальных слайдах. ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Устойчивость по направлению
Ссылки
Добавление глубины резкости меняет ситуацию….много! Совершенно другая ситуация, когда вы добавляете ролл. Транспортное средство ниже — «Reliant Robin».
Смотрите в действии: http://www.youtube.com/watch?v=roAKRTR69zU&feature=related http://www.youtube.com/watch?v=QQh56geU0X8 ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Более сложная проблема с поперечным скольжением Для оценки устойчивости и контроля колесных транспортных средств нам необходимо понимать влияние скольжения как в продольном, так и в поперечном направлении.Сначала мы обсудим боковое скольжение и индуцированную силу. Затем мы рассмотрим совместное действие продольных и поперечных сил скольжения. Явление контакта колеса с землей является значительным источником неопределенности в динамике транспортного средства из-за сложности и изменчивости процессов трения. ME 379M / 397 Cyber Vehicle Systems (Longoria)
Направление устойчивости
Ссылки
Схема
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Боковое усилие при контакте колеса с землей
Угол скольжения, α, образуется между плоскостью колеса и направлением вынужденного внеплоскостного движения.Боковое усилие возникает при контакте колеса с землей только в том случае, если колесо движется в направлении, отличном от его плоскости, а не при прямом движении колеса. Боковая сила, действующая перпендикулярно плоскости колеса, позволяет автомобилю управлять и совершать повороты.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Устойчивость по направлению
Справочные данные
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Стабильность по направлению
Поперечная устойчивость
Обозначения
, силы являются функцией угла скольжения Для пневматических шин сила поворота связана с углом скольжения,
Примеры соотношений для радиальных и диагональных шин показаны на рисунке ниже.
Fyα = f (α) и для малых углов скольжения Fyα ≈ Cα α, где Cα называется жесткостью на поворотах.
Угловая сила также может зависеть от других факторов, таких как развал колеса, нормальная нагрузка, давление в накачке, передача поперечной нагрузки, размер и тип шины (например, радиальная, диагональная и т. Д.), Количество слоев, угол наклона корда, ширина колеса и протектор.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Устойчивость по направлению
Ссылки
Коэффициент прохождения поворотов
определяется как CCα = Cα / Fz, где Fz — вертикальная нагрузка.Обратите внимание, что для Cα используются единицы силы / угла (например, Н / рад), а для CCα — единицы 1 / угол. Типичный седан может иметь CCα около 8 рад − 1, а спортивный автомобиль может иметь значение около 40 рад − 1.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Покрытые брызгами шины?
From Wong [10]
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Боковое скольжение и сила
Направленная устойчивость
Каталожные номера
Схема
Введение
Одноосный автомобиль
Поперечное усилие
курсовая устойчивость
Каталожные номера
Хорошо, но как насчет колес из твердой резины?
Боковая сила по существу моделируется кулоновской силой Fy / Fz = µy, где коэффициент бокового трения µy теперь принимает более сложную функциональную форму в зависимости от угла скольжения, нормальной нагрузки и т. Д.Реальные данные о колесах из твердой резины найти сложно. Однако можно было бы ожидать, что поперечная сила будет «нарастать» от нуля по мере увеличения угла скольжения. «Жесткость» резины, вероятно, сделает колесо более жестким в поперечном направлении. (Если вы найдете какие-либо данные о силе поворота на жестких резиновых колесах, поделитесь!)
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Outline
Introduction
Одноосный автомобиль
Боковое скольжение и усилие
Направление устойчивость
Ссылки
Направленная устойчивость с учетом бокового скольжения
Прежде чем рассматривать влияние продольного скольжения, может быть исследована курсовая устойчивость транспортного средства, подверженного боковому скольжению.Например, при изучении характеристик управляемости принято предполагать, что поступательная (продольная) скорость транспортного средства постоянна (в установившемся режиме), как это было сделано для упрощенной модели, изученной ранее. Рокар (1903–1992) сообщил об одном из первых анализов курсовой устойчивости двухосного транспортного средства в 1954 году [7]. Краткое изложение его работы можно найти в Steeds [9] (поскольку оригинальную работу может быть трудно найти).
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Модель Рокарда [9] В модели Рокарда транспортное средство упрощено в виде жесткой прямоугольной рамы с колесами на каждом углу а плоскость каждого колеса вертикальна и параллельна раме.Нет (кинематического) поворота колес. Усилие рулевого управления (т. Е. Силы поворота на каждое колесо / шину) моделируется линейной зависимостью F = Kα (в современных обозначениях Fy = Cα α), где α — угол скольжения, K — жесткость на повороте и контакт предполагается, что движение транспортного средства не влияет на силы. ME 379M / 397 Cyber Vehicle Systems (Longoria)
Боковое скольжение и сила
Направленная устойчивость
Каталожные номера
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Опорная устойчивость
Результат Рокара Рокар вывел два ОДУ 2-го порядка для этой задачи и из линейных приближений нашел характеристическое уравнение, s2 + Rs h + S s2 = 0 i 2 2 R = M2V K1 1 + ka2 + K3 1 + kb 2 S =4K1 K3 (a + b) 2 (M кВ) 2
—
2 (K1 a − K3 b) M k2
, из которого он определил критическую скорость, 2
Vc2 =
2K1 K3 (a + b ) M (K1 a — K3 b)
, ниже которого автомобиль будет устойчивым по курсу.Если K3 b> K1 a, автомобиль устойчив на всех скоростях. ME 379M / 397 Cyber Vehicle Systems (Longoria)
1
Результаты определяют положение центра масс транспортного средства и характеристики усилия рулевого управления для передних и задних шин
2
При равном усилии рулевого управления обеспечивается стабильность если b больше, чем a, или если ЦТ находится перед средней точкой колесной базы.
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Каталожные номера
Классическая двухосная модель «велосипеда» (четырехколесного транспортного средства) Эта модель предполагает наличие двух колес на передней и задней оси двухосного транспортного средства имеют равные углы скольжения и нормальные нагрузки (также называемая одноколейной моделью).Влияние крена и тангажа не учитывается.
От Вонга [10] (Глава 5)
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Модель велосипеда имеет как минимум три состояния: — поступательный импульс или скорость прямого ЦТ — поперечный поступательный импульс или скорость ЦТ — рыскание угловой момент или скорость около CG
Схема
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Ссылки
Уравнения динамики модели велосипеда Приведенные ниже уравнения имеют форму / обозначение, данное Вонгом [ 10] (глава 5), но может быть получено из основных уравнений Эйлера.Это уравнения с фиксированным телом. m (v˙ x — vy ωz) = Fxf cos (δf) + Fxr — Fyf sin (δf) | {z} {z} | {z} | передний привод
задний привод
влияние поперечной силы
м (v˙ y + vx ωz) = Fyr + Fyf cos (δf) + Fxf sin (δf) Iz ω˙ z = l1 Fyf cos (δf) — l2 Fyr + l1 Fxf sin (δf) Обратите внимание, что правые части — это в основном просто «внешние» силы и моменты (здесь приложенные силами индуцированного взаимодействия шины с поверхностью). Уравнения легко адаптируются для включения управления задними колесами, а также внешних сил или крутящих моментов из-за органов управления или возмущений.Помните: продольные и поперечные силы колеса / шины являются функциями переменных состояния движения (vx, vy, ωz). ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Формулы угла скольжения
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Боковое скольжение и сила
Направление устойчивости
Ссылки
Схема
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Модель велосипеда с уменьшенной степенью свободы — 2 степени свободы, vx = постоянная В этом случае мы считаем скорость движения постоянной, поэтому : vx = V δf = δ = угол поворота (малый) mv˙ x — vy omegaz = Fxf cos (δf) + Fxr — Fyf sin (δf) | {z} | {z} | {z} задний привод
передний привод
влияние поперечной силы
Итак, уравнения приведенной модели велосипеда (опять же, фиксированные на корпусе): mv˙ y = Fyr + Fyf + Fxf δf −mvx ωz | {z} ∼0
Iz ω˙ z = l1 Fyf — l2 Fyr + l1 Fxf δf | {z} ∼0
Обратите внимание, что хотя δ выпадает при приближении малых углов, оно снова входит в поперечные силы через определения угла скольжения, поскольку αf = δf — tan − 1 (vy + l1 ωz) / vx ≈ δf — (vy + l1 ωz) / vx, а −1 αr = tan (l2 ωz — vy) / vx ≈ (l2 ωz — vy) / vx.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Ссылки
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Справочная информация
Глобальная траектория движения
Только что представленные модели велосипедов рассчитывают скорость движения вперед и в поперечном направлении, а также скорость рыскания в результате входных углов поворота, δ, относительно осей, закрепленных на корпусе. Чтобы найти траекторию и ориентацию (X, Y, ψ) транспортного средства в наземных координатах, мы используем уравнения преобразования для двумерного моделирования траектории, как и раньше, X˙ = vx cos (ψ) — vy sin (ψ) Y˙ = vx sin (ψ) + vy cos (ψ) ψ˙ = ωzME 379M / 397 Cyber Vehicle Systems (Longoria)
Схема
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Направление устойчивости
Ссылки
Примеры моделирования модели велосипеда
Следующие примеры проиллюстрированы с помощью моделирования: 1
Уменьшенная модель велосипеда моделируется на постоянной скорости с нулевым углом поворота и между моментами времени tdon и tdof fa в поперечное направление на передней оси.Сравнивается отклик стабильного автомобиля и нестабильного, поскольку жесткость заднего поворота снижается вдвое.
2
Устойчивая модель транспортного средства управляется с помощью команд рулевого управления без обратной связи для смены полосы движения.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Устойчивость по направлению
Ссылки
«Простая» модель велосипеда «Простая» модель велосипеда Код относится к уменьшенной модели велосипеда, в которой скорость движения постоянна, поэтому состояниями являются только поперечная скорость и скорость рыскания, а также глобальное положение и ориентация.2 Wf = L2 * Вт / л; % статической нагрузки на переднюю ось Wr = L1 * W / L; % статической нагрузки на заднюю ось% Обратитесь к Wong, раздел 1.4, чтобы узнать о следующих параметрах CCf = 0,171 * 180 / pi; % коэффициент жесткости лобовой части, / рад CCr = 1 * 0,181 * 180 / пи; % коэффициент жесткости заднего каркаса, / рад Cf = CCf * Wf / 2; % жесткости Corning на шину, Н / рад (перед) Cr = CCr * Wr / 2; % жесткости на повороте сзади на шину, Н / рад (задняя) ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Каталожные номера
Возмущающая сила в «простой» модели велосипеда Этот первый пример показывает, как транспортное средство реагирует на возмущающую силу, приложенную к передней оси, для двух разных случаев.
Обратите внимание на возмущающую силу, Fd vy_dot = (-m * vx * omegaz + Fyr + Fyf * cos (deltaf) + Fxf * sin (deltaf) + Fd) / m; omegaz_dot = (L1 * Fyf * cos (deltaf) — L2 * Fyr + L1 * Fxf * sin (deltaf) + Fd * L1) / Iz;
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Устойчивость по направлению
Ссылки
Стабильная реакция по сравнению с нестабильной базой
Стабильный случай
ME
379M / 397 Cyber Vehicle Systems (Longoria)
Жесткость на поворотах сзади уменьшена вдвое
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и усилие
Смена полосы движения с разомкнутым контуром Фиксированные углы поворота -определенные периоды времени для создания двойной смены полосы движения.
Входы смены полосы движения% двойной смены полосы движения if (t = 1 & t = 2 & t = 3 & t = 4 & t = 5 & t = 6) deltaf = 0; конец;
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Устойчивость по направлению
Справочные данные
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Устойчивость по направлению, устойчивость
Справочные данные
Контрольные данные и управляемость Термины «контроль», «устойчивость» и «управляемость» тщательно определены в динамике автомобиля.Диксон [2] определяет эти термины следующим образом: Управление — это действие водителя, направленное на то, чтобы повлиять на движение автомобиля. Стабильность относится к нежеланию автомобиля отклоняться от существующего пути, что обычно является желательной чертой в умеренных количествах. Управляемость — это способность автомобиля успешно проходить повороты, изучение того, как это происходит, и изучение восприятия водителями поведения автомобиля на поворотах. Использование определенных терминов для описания динамики транспортного средства должно учитывать контекст, в котором они используются.Рассмотрим термины недостаточная и избыточная поворачиваемость, которые определены ниже.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Устойчивость по направлению
Ссылки
Снижение поворачиваемости и избыточная поворачиваемость От
недостаточная и избыточная поворачиваемость относятся к восприятию водителем того, насколько автомобиль чувствителен к командам рулевого управления.Для транспортного средства с недостаточной поворачиваемостью водитель будет ощущать, что для прохождения данного поворота требуется больше рулевого управления, чем ожидалось, в то время как для транспортного средства с избыточной поворачиваемостью верно обратное. С этой точки зрения автомобиль с недостаточной поворачиваемостью будет иметь тенденцию ощущаться «вялым», в то время как автомобиль с избыточной поворачиваемостью будет чувствовать себя чрезмерно чувствительным к командам рулевого управления. Это имеет смысл, если определить с точки зрения устойчивости системы, что автомобиль с недостаточной поворачиваемостью является устойчивым, а автомобиль с избыточной поворачиваемостью может быть нестабильным. Коэффициент недостаточной поворачиваемости, или градиент, Kus, используется для количественной оценки этих характеристик: Kus> 0 ⇒ недостаточная поворачиваемость, всегда стабильная по направлению KusME 379M / 397 Cyber Vehicle Systems (Longoria)
Outline
Introduction
Одноосный автомобиль
Боковое скольжение и сила
Направленная устойчивость
Ссылки
Коэффициент или градиент недостаточной поворачиваемости Коэффициент или градиент недостаточной поворачиваемости, Kus, определяется как Wf Wr Kus = — Cαf Cαr Это выражение можно использовать двумя разными способами.1
Кус можно определить из анализа устойчивости модели велосипеда. Это не должно вызывать удивления, поскольку Рокар вывел критерий устойчивости из аналогичной модели. Фактически, можно показать, что результаты эквивалентны.
2
Кус может быть получен путем объединения уравнения поперечной динамики в установившемся режиме с кинематикой поворачивающегося транспортного средства. Эти результаты дают представление о концепции нейтрального рулевого управления, поскольку Kus возникает как член в уравнении рулевого управления, δ = L / R + Kus ay / g, где δ — угол поворота, необходимый для достижения поворота радиуса R для транспортного средства. с колесной базой L и ay — поперечное ускорение в повороте.Обратите внимание, что автомобиль с нейтральным рулевым управлением имеет идеальное рулевое управление, δ = L / R.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Устойчивость по направлению
Справочные данные
Уравнение рулевого управления и Кус Наклон недостаточной поворачиваемости помогает определить величина и направление управляющих воздействий, необходимых для достижения нейтрального поворота. Это мера направленного отклика разомкнутого контура.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Устойчивость по направлению
Ссылки
Пример: влияние шин на управляемость и устойчивость
Этот плакат из сервисного центра розничной продажи шин пытается показать, как значительная разница в степени износа ваших шин может привести к нестабильности, особенно когда дорожные условия ухудшают адгезионные свойства.1«Как правило, новые шины обеспечивают повышенное сопротивление аквапланированию за счет полной глубины протектора. С новыми шинами на задних колесах легче избежать заноса из-за чрезмерной поворачиваемости ».
2
«Независимо от того, является ли ваш автомобиль передним, задним или полноприводным, если ваши задние колеса теряют сцепление с дорогой из-за аквапланирования на мокрой дороге, избыточная поворачиваемость может привести к потере управления, особенно в поворот ».
3
«Вождение автомобиля с неподходящим комплектом шин опасно.Это может серьезно повлиять на управляемость вашего автомобиля ».
Не могли бы вы оспорить существо утверждений, сделанных в этом плакате?
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Устойчивость по направлению
Каталожные номера
Нестабильность по рысканию вокруг передней оси Уменьшены поперечные шины или допустимая сила поворота, которая напрямую влияет на поперечную динамику и динамику рыскания автомобиля.Это дополнительно усугубляется тем фактом, что более низкие продольные или тяговые силы в шинах могут облегчить блокировку колеса во время торможения.
Нестабильность рыскания может возникнуть, если передние и задние колеса не блокируются одновременно. Возмущение относительно центра рыскания передней оси вызовет рыскание, которое прогрессирует с повышенным ускорением с уменьшением, когда он завершает поворот на 180 градусов. ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Устойчивость по направлению
Каталожные номера
Последствия потери поперечной силы при блокировке колеса Отличная иллюстрация На рисунке 3 показано, что происходит с силой поворота, когда колесо / шина приближается к 100% скольжению или заносу, как при блокировке.54 из Вонга [10], воспроизводится ниже.
Очевидно, почему алгоритмы контроля тяги борются за то, чтобы поддерживать пробуксовку / занос на уровне 20% или ниже, чтобы поддерживать курсовую устойчивость автомобиля. ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Устойчивость по направлению
Справочные документы
Пример: ранние испытания Брэдли и Вуд (1931 г.) Эти ранние эксперименты иллюстрируют влияние на курсовую устойчивость при блокировке одного или нескольких колес
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Ссылки
Эти результаты «предсказуемы». После того, как комбинированное моделирование продольных и поперечных сил выполнено, можно достичь относительно хорошего прогноза курсовой устойчивости транспортного средства.На приведенном ниже графике показаны результаты двух различных исследований экспериментов Брэдли и Вуда.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Устойчивость по направлению
Справочные материалы
Тяговые / тормозные силы вызывают снижение силы на поворотах Типичные тенденции Ниже показано, как сила тяги влияет на силу поворота.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
Одноосное транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Ссылки
Моделирование сочетания продольных и поперечных сил идеальный эллипс.
Как вы этим пользуетесь? 1
Учитывая состояние привода колеса / шины, вы знаете скольжение, s.
2
Вы найдете Fx при s
3
Для данной кривой µ — скольжения вы знаете Fx max
4
Значение Fy α — это максимальная сила поворота для данного значения угла скольжения α .
5
Затем, чтобы найти фактическую (приведенную) силу на повороте, Fy, при текущих условиях скольжения и угла скольжения, вы оцениваете, используя уравнение модели эллипса.
Эллипс трения выглядит следующим образом:
Fy Fyα
2
+
Fx Fx max
2 = 1
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Краткое описание
Введение
транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Ссылки
Резюме Устойчивость транспортного средства зависит не только от сил, возникающих на стыке шины / колеса с землей, и от того, как они уравновешиваются с динамикой транспортного средства, но также и от других приложенных сил и моментов , преднамеренно или нет.Можно изучить ряд различных транспортных платформ, от одноосных транспортных средств, которые обычно используются в небольших наземных роботах, до многоосных транспортных средств, более распространенных для транспортных средств, используемых для пассажирских, промышленных и т. Д. Приложений. Это понимание может быть полезно при рассмотрении того, как следует строить и развертывать автомобильные системы. Картина стабильности не является полной, так как нам необходимо изучить, как ведут себя управляемые автомобильные системы, и применить методы устойчивости для управления настройкой и внедрением и т. Д.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Outline
Introduction
Одноосное транспортное средство
Боковое скольжение и сила
Направленная устойчивость
Каталожный номер
Каталожный номер
[1]
J.П. Ден Хартог, Механика, Дуврское издание.
[2]
Дж. К. Диксон, Шины, подвеска и управление (2-е изд.), SAE, Warrendale, PA, 1996.
[3]
Д. Т. Гринвуд, Принципы динамики, Прентис-Холл, 1965. ( или любое более позднее издание).
[4]
Т.Д. Гиллеспи, Основы динамики транспортного средства, SAE, Warrendale, PA, 1992.
[5]
D.C. Karnopp and D.L. Марголис, Технические приложения динамики, John Wiley & Sons, Нью-Йорк, 2008.
[6]
J.B. Liljedahl, P.K. Тернквист, Д. Смит и М. Хоки, Тракторы и их силовые агрегаты, ASAE, Сент-Джозеф, Мичиган, 1996.
[7]
Я. Рокар, «L’instabilite en Mecanique», Masson et Cie, Paris, 1954.
[8]
Л. Сегель, «Теоретическое предсказание и экспериментальное обоснование реакции автомобиля на рулевое управление», Институт инженеров-механиков, Труды автомобильного отдела, № 7, стр. 310-330, 1956-7.
[9]
W. Steeds, Mechanics of Road Vehicles, Iliffe and Sons, Ltd., Лондон, 1960.
[10]
J.Y. Вонг Дж. Ю. Теория наземных транспортных средств, John Wiley and Sons, Inc., Нью-Йорк, 2001 г. (3-е изд.).
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости по Рау
Примеры критериев устойчивости по Рау
Определения устойчивости Мы должны уточнить наше понимание устойчивости транспортного средства.Статическая устойчивость системы относится к ее способности или тенденции искать состояние статического равновесия после того, как оно было нарушено. При небольшом отклонении от состояния равновесия оно устойчиво, если возвращается в состояние равновесия. Справа показан классический способ иллюстрации этих концепций.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Статическая устойчивость иногда измеряется, например, величиной силы (или крутящего момента), необходимой для смещения тела на определенное расстояние (или угол).
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости Рауса
Примеры критериев устойчивости Рауса
Статическая и динамическая устойчивость транспортных средств Исследование наземных транспортных средств должно учитывать как статическую, так и динамическую устойчивость движения в одной или нескольких основных степенях свобода: продольная, поперечная, рыскание, крен и т. д.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Транспортное средство, которое нестабильно статично, обычно нестабильно динамически.Однако нелегко оценить, будет ли статически устойчивая система также динамически устойчивой. Анализ с помощью линеаризованных моделей обращается к динамической устойчивости, но может быть неточным для больших движений от равновесия, когда нелинейный анализ или моделирование более точны. В любом случае полученное понимание ровно настолько хорошо, насколько хороша модель.
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости Рауса
Примеры критериев устойчивости Рауса
Устойчивость линейных систем Мы используем модели для понимания стабильности, признавая, что они несовершенны и не предназначены для включения всех эффектов, которые могут повлиять на стабильность , как известные, так и неизвестные.Например, силы, вызванные взаимодействием с землей и имеющие значительную изменчивость, играют ключевую роль и могут возникать как в результате пассивных, так и активных действий. Мы все еще можем многому научиться, используя линейные модели таких сил. Методы анализа устойчивости с использованием линейных систем дают представление, даже если они применимы только для небольшого движения относительно состояния равновесия. На следующих слайдах представлены некоторые из этих методов.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости Рауса
Примеры критериев устойчивости Рауса
От BIBO до оценки устойчивости с использованием функций s-области, графиков полюс-ноль 1
Рассмотрим постоянную силу, приложенную к массе, скажем, p˙ x = mv˙ x = Fx = F.В то время как входная сила ограничена, выходная скорость vx не ограничена. Эта система не является стабильной с ограниченным входом-ограниченным выходом (BIBO).
2
Система с импульсной характеристикой h (t) называется BIBO тогда и только тогда, когда Z ∞ | h (t) | dt
R
3
Например, массовая «система» имеет функция импульсного отклика h (t) = RR∞ ∞ −∞ | h (τ) | dτ = 0 1 · dτ = ∞ (не ограничена).
4
Передаточная функция системы G (s) может быть найдена путем преобразования Лапласа функции импульсной характеристики.
5
Преобразование Лапласа единичного шага, 1 (t), равно 1 / с.
6
Передаточная функция системы с одной массой, которая имеет входное усилие, выражается G (s) = V / F = 1 / s.
7
Передаточная функция 1 / с имеет единственный полюс (корень) в начале координат при нанесении на график полюс-ноль.
8
Любая система с одним полюсом в исходной точке не является стабильной BIBO.
9
Системы, у которых есть полюса с положительными действительными частями, нестабильны.
F dt = 1 (t), функция единичного шага. Итак,
10 Системы, у которых есть полюса с отрицательными действительными частями, являются стабильными. 11 Системы, у которых есть полюсы на воображаемой оси, называются предельно устойчивыми (они колеблются).
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости Рауса
Примеры критериев устойчивости Рауса
Стабильность системы низкого порядка
Для одной степени свободы проблемы со стабильностью могут быть легче изучать и понимать, используя «физическую» интерпретацию или анализ.Динамические системы второго порядка позволяют нам построить фундаментальное понимание определений устойчивости. В следующих примерах характеристическое уравнение из линейного дифференциального уравнения используется для понимания того, как собственные значения зависят от параметров системы.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости Рауса
Примеры критериев устойчивости Рауса
Пример линейной системы вращения Для простой системы вращения, представленной ниже, характеристическое уравнение имеет следующий вид: s2 + (b / J) s + (k / J) = 0.Корни легко найти: s 2 kbb ± j — s = — 2J J 2J
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Пока b и J положительны, эта модель говорит нам, что эта система всегда стабильный. Полюса всегда находятся справа от мнимой оси (отрицательные действительные части).
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости Рауса
Примеры критерия устойчивости Рауса
Устойчивость с различными уровнями демпфирования
График сложных корней для вращательной системы, показанный ниже, показывает, как корни изменяются в зависимости от демпфирования, б.
Случаи, когда корни находятся на мнимой оси, соответствуют чистым гармоническим колебаниям. Иногда мы говорим, что это незначительно или нейтрально. Когда b дает корни в (f), система нестабильна. Ситуации, когда затухание отрицательное, могут возникать в некоторых физических системах, хотя этот эффект может быть только временным. Тем не менее, этого может быть достаточно, чтобы вызвать автоколебания, как показано на следующем слайде.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости по Раусу
Примеры критериев устойчивости по Раусу
Неустойчивость, вызванная отрицательным демпфированием
Отрицательные демпфирующие силы
Отрицательные демпфирующие силы из-за сухого трения о ленту (вибрация)Обратите внимание, что эффективное демпфирование, обозначенное НАКЛОНОМ кривой, в обоих случаях отрицательно.Это один из способов определить вероятность нестабильности в системе. ME 379M / 397 Cyber Vehicle Systems (Longoria)
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости Рауса
Примеры критериев устойчивости Рауса
Неустойчивость, вызванная отрицательной жесткостью Отрицательная жесткость также может привести к нестабильному поведению. Работа клапана впрыска топлива, показанная ниже, специально имеет отрицательные характеристики пружины, как показано на характеристиках справа.
Возвратная сила, действующая на гирю, складывается из механической силы пружины и силы «Бернулли» из-за изменения давления на седле клапана. ME 379M / 397 Cyber Vehicle Systems (Longoria)
Кривая силы-смещения
Клавиши на клавиатуре также имеют аналогичную преднамеренно «нестабильную» конструкцию, предназначенную для изгиба.
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости Рауса
Примеры критериев устойчивости Рауса
Критерий устойчивости Рауса — 1
Для более сложных систем может быть непросто «интуитивно» оценить стабильность или легко решить корни систем низкого порядка.Мы можем оценить «абсолютную стабильность», используя критерий устойчивости Рауса. Этот метод сообщит нам, стабильна ли система, но ничего не скажет о «насколько» стабильной или относительной стабильности. Мы получаем представление об относительной стабильности, изучая конкретные положения полюсов системы на реально-воображаемой плоскости. Например, метод корневого локуса дает представление об относительной стабильности.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости Рауса
Примеры критерия устойчивости Рауса
Критерий устойчивости Рауса — 2
Критерий устойчивости Рауса позволяет определить число полюсов передаточной функции, лежащих в правой половине s-плоскости без необходимости факторизации полинома.Это относится к передаточным функциям с конечными полиномами вида G (s) =
B (s) bm sm + bm − 1 sm − 1 + · · · + b1 s + b0 = an sn + an − 1 sn− 1 + · · · + a1 s + a0 A (s)
Это полезно, чтобы помочь определить диапазон, например, который могут принимать определенные параметры без потери стабильности системы.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости Рауса
Примеры критериев устойчивости Рауса
Критерий устойчивости Рауса Таблица Рауса:
an sn + an − 1 sn − 1 + · · · + A1 s + a0 = 0 an − 1 an − 2 — an an − 3 an − 1 an − 1 an − 4 — an an − 5 b2 = an − 1
b1 =
b1 an− 3 — an − 1 b2 c1 = b1 c2 =
b1 an − 5 — an − 1 b3 b1
ME 379M / 397 Cyber Vehicle Systems (Longoria)
sn sn − 1.. . …
ан-2 ан-4. . . ан-1 ан-3 ан-5. . . b1
b2
b3. . .
c1
c2
c3. . .
Критерий: Корни имеют отрицательные действительные части тогда и только тогда, когда элементы первого столбца таблицы Рауса имеют одинаковый знак. Количество смен знака равно количеству корней с положительными действительными частями.
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости Рауса
Примеры критериев устойчивости Рауса
1
Описание критерия устойчивости Рауса
2
Пример 1 — числовое характеристическое уравнение
3
— диапазон нахождения 9000 из K для устойчивости4
Пример 3 — определение диапазона K для устойчивости
5
Пример 4 — Анализ устойчивости по Routh для шимми колеса
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Примеры критериев устойчивости по Routh
Концепции устойчивости
Анализ устойчивости
Пример Рауса -1
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Критерий устойчивости Рауса
Примеры критерия устойчивости Рауса
Концепции устойчивости
Пример анализа устойчивости
2ME 379M / 397 Cyber Автомобиль Systems (Longoria)
Критерий устойчивости Рауса
Примеры критерия устойчивости Рауса
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости Рауса
Примеры критерия устойчивости Рауса
Пример Рауса — 3 Для характеристического уравнения определите K для устойчивости.Таблица Рауса: 3
2
s + 3s + 3s + 1 + K = 0 Мы требуем, чтобы оба этих условия выполнялись для устойчивости, 8 − K> 0 1 + K> 0, следовательно, −1
ME 379M / 397 Cyber Vehicle Systems (Longoria)
s3 1 3 0 … s2 3 1 + K 0 … 0 … s1 (8 — K) / 3 s0 1 + K 0 …
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости по Раусу
Примеры критериев устойчивости по Раусу
Анализ устойчивости по Раусу для регулировочной шайбы колеса — 1 На приведенном ниже рисунке показана регулировочная шайба колеса, распространенная в конструкциях осей транспортных средств 1930-х годов [1].Для объяснения требуется описание 3 степеней свободы. Это самовозбуждающаяся вибрация, но она также может быть вызвана дисбалансом шин.
Регулировочная шайба колесного типа более четко проиллюстрирована ниже.
Анализ устойчивости по Раусу (следующий слайд) показывает, что система устойчива, если mal> IG + ma2. Проблема в конечном итоге устраняется независимой подвеской передних колес.
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Концепции устойчивости
Анализ устойчивости
Критерий устойчивости по Раусу
Примеры критериев устойчивости по Раусу
Анализ устойчивости по Раусу для колесных шайб — 2
Характеристическое уравнение для колесных шайб , s3 +
amV kl2 V kl 2 s + s + = 0 2 2 IG + ma IG + ma IG + ma2
Из таблицы Рауса требуется стабильность, aml> IG + ma2 и, V kl> 0
ME 379M / 397 Cyber Vehicle Systems (Longoria)
Таблица Рауса: s3 s2 s1 s0
1 амВ / Ie (kl2 / Ie — V kl / amV) V kl / (IG + ma2)
, где Ie = IG + ma2
kl2 / Ie V kl / Ie 0 0
0 0
… … … …
Испытание курсовой устойчивости тормозной машины
Заказчик военных исследований и разработок
Глэсьер Чен, менеджер по отраслевым приложениям для электромобилей, Dewesoft China
Несмотря на усовершенствования конструкции шасси автомобиля за последние десятилетия, смещение рулевого управления во время торможения, когда водитель должен применить корректирующий крутящий момент рулевого управления для сохранения курса, все еще может наблюдаться в определенных условиях во время движения.
Заказчику, занимающемуся военными исследованиями и разработками, необходимо точно измерить эффективность торможения транспортных средств, в частности, как точно измерить смещение центральной линии тормоза.Компания Dewesoft предоставила решение, основанное как на плагине Dewesoft X Brake test, так и на плагине Polygon в сочетании с технологией GPS RTK.
Введение
Все автомобили демонстрируют некоторую нестабильность направления при прямолинейном торможении, так как реальные автомобили не являются действительно симметричными.
По сегодняшним стандартам транспортного средства, управляемости и управляемости , даже незначительное отклонение такого типа недопустимо.Если водитель не исправит ситуацию, автомобиль может съехать на определенную сторону дороги, так называемое тормозное усилие. Существует множество источников такого поведения:
- кинематический тормоз рулевого управления,
- асимметричное массовое распределение, или
- тормозной дисбаланс.
Существует три оценочных показателя эффективности торможения автомобиля:
- эффективность торможения,
- постоянство эффективности торможения, а
- курсовая устойчивость тормозящего автомобиля.
Направление устойчивости при торможении — это характеристика, при которой автомобиль не рыскает, не скользит и даже не теряет управляемость при торможении.
В дополнение к регистрации общих параметров испытания тормозов, таких как тормозной путь, начальная скорость торможения, среднее полное замедление (MFDD) и другие параметры, нашему клиенту необходимо было измерить скорость угла рыскания во время торможения и отклонение центральной линии тормоза. сумма и т. д.
Скорость рыскания может быть точно измерена гироскопом.Как точно измерить смещение центральной оси тормоза было проблемой для клиента.
Инерциальная навигационная система DS-IMU2 от Dewesoft
Заказчик
Причины отклонения рулевого управления при торможении необходимо выяснить на этапе проектирования. Заказчиком этого проекта является военных R&D , и ему требуется набор оборудования, которое может точно измерить тормозные характеристики военных автомобилей .
В Европейском стандарте ECE R13H, приложение 3 Испытания на торможение и характеристики тормозных систем, 1.2.7 предусматривает, что транспортное средство не должно отклоняться от испытательной дороги длиной 3,5 метра. В китайских стандартах GB7258-2017 также есть четкие требования к тормозам транспортных средств, согласно которым они не могут отклоняться от 2,5-метровой полосы движения при торможении.
ECE R13H Приложение 3, параграф 1.2.7. состояния:
Требуемые характеристики должны быть достигнуты без блокировки колес на скоростях, превышающих 15 км / ч, без отклонения транспортного средства от полосы движения шириной 3,5 м, без превышения угла рыскания 15 ° и без аномальных вибраций.
Следовательно, необходимо одновременно измерять эффективность торможения и курсовую устойчивость транспортного средства во время торможения.
Заказчику необходимо рассчитать следующие параметры:
- тормозной путь,
- начальная скорость торможения,
- означает полное замедление (MFDD),
- смещение осевой линии тормоза и т. Д.
Смещение центральной линии тормоза определяется как расстояние по вертикали от точки проекции центра масс испытуемого транспортного средства на землю до прямой траектории транспортного средства.Как предсказать прямолинейную траекторию автомобиля при торможении — это ключ к точному измерению смещения центральной линии тормоза.
Задача измерения
В программном обеспечении для сбора данных DewesoftX вы можете использовать модуль проверки тормозов для выполнения проверки эффективности тормозов и подключаемый модуль многоугольника для измерения смещения центральной линии тормозящего транспортного средства.
Однако плагин Polygon может измерять расстояние между конечным положением транспортного средства и выносной линией курса транспортного средства только в момент торможения.
Поскольку угол движения автомобиля при движении по прямой перед торможением может незначительно колебаться, измерения неточны. Например, при прямом измерении угол курса может колебаться до 1,51 °. Предполагая тормозной путь 45 м, погрешность измерения смещения осевой линии тормоза составляет sin (1,51 ° / 2) * 45 = 0,6 м, что, очевидно, слишком неточно.
Рисунки 1. и 2. Колебание угла курса и смещение центральной линии торможения.
Решение для измерений
Объединив реальные потребности заказчиков, мы предложили заказчику тестовое решение на основе технологии GPS RTK.
Навигационные системы Dewesoft (GPS / GNSS и IMU / INS)
В систему входят:
Рис. 3. Общая схема измерения.
Что касается расчета тестовых данных, мы предложили нашим клиентам использовать среднее значение угла курса за одну секунду до запуска теста в качестве прогнозируемого угла курса для расчета траектории движения по прямой.Следовательно, можно уменьшить количество ошибок, вызванных колебаниями угла курса или отклонениями направления движения.
Рис. 4. Угол курса за секунду до тестового триггера, используемый для расчета траектории движения по прямой.
Программные настройки
1) Использование статистической функции в математической формуле для увеличения канала вычисления среднего угла курса.
Рисунок 5. Настройка базовой статистики в программе DewesoftX DAQ.
2) Настройка виртуального транспорта в плагине Polygon. Автомобиль использует средний угол курса в качестве угла курса.
Рисунок 6. Угол курса в подключаемом модуле DewesoftX Polygon.
3) Добавление заголовка прогноза и использование функции блокировки триггера.
Рис. 7. Функция многоугольной блокировки триггера DewesoftX.
4) Добавление канала для расчета расстояния от центра транспортного средства до прогнозируемой линии курса.
Это значение представляет собой смещение осевой линии тормоза, рассчитанное с использованием среднего угла курса за 1 секунду до срабатывания спускового крючка, который является прогнозируемым углом курса.
Рисунок 8. Настройка выходных каналов Dewesoft X polygon.
Заключение
Это решение Dewesoft для испытания тормозов также можно рекомендовать клиентам, занимающимся исследованиями в области автомобильных тормозов. Помогите им участвовать в исследованиях в области автомобильного торможения и повысить устойчивость автомобиля.
Это решение было продемонстрировано заказчику, и заказчик доволен и готовится к закупке.
По сравнению с решениями конкурентов, решение Dewesoft вполне может удовлетворить потребности клиентов в тестировании, с гибкими настройками параметров и высокоточным оборудованием для сбора данных для тестирования.
Как это работает: Контроль устойчивости
Дрифт на автомобиле боком — отличное развлечение для опытного гонщика на замкнутой трассе, но это определенно не то, чем водители хотят заниматься в пробках в повседневных поездках. Чтобы помочь вам оставаться на верном пути, Transport Canada требует, чтобы каждое новое пассажирское транспортное средство, продаваемое в Канаде, начиная с 2012 модельного года, было оснащено электронной системой контроля устойчивости (ESC).
Система реагирует за миллисекунды, когда определяет, что автомобиль движется не в том же направлении, что и рулевое управление — другими словами, занос — и немедленно принимает меры, чтобы все выровнять. Считается достаточно важным то, что эта функция безопасности теперь также требуется на новых тракторных прицепах, продаваемых в Канаде, а в июне следующего года — также на междугородних и школьных автобусах.
Хотя все системы ESC в основном работают одинаково, между ними могут быть незначительные различия, поэтому автопроизводители часто присваивают им собственные имена.Вы можете увидеть, как это рекламируется под такими терминами, как система стабилизации транспортного средства (Acura), AdvanceTrac (Ford), StabiliTrak (General Motors) или Vehicle Dynamic Control (Nissan), среди многих других.
Контроль устойчивости очень помогает на наших зимних дорогах, но не на столько. Майкл Пик / Торонто СанСистема контроля устойчивости использует компоненты и датчики некоторых других функций безопасности автомобиля, включая антиблокировочную систему тормозов (ABS). Тормоза не дают колесам поворачиваться, но на самом деле именно шины, цепляющиеся за асфальт, останавливают автомобиль, и даже хорошие шины способны на многое.В транспортном средстве без АБС заклинивание тормозов приводит к блокировке колес, и шины могут скользить и превращать транспортное средство в гигантский тобогган.
До появления ABS водителей учили включать и выключать тормоза, давая шинам возможность цепляться за тротуар каждый раз, когда тормоза отпускаются. Антиблокировочная система тормозов делает то же самое, но с помощью электроники они нажимают и отпускают намного быстрее, чем это может сделать любой водитель, помогая сохранять устойчивость автомобиля при остановке. При панической остановке в автомобиле с АБС вы сильно нажимаете на тормоз и не отпускаете ногу, позволяя системе делать свое дело.Когда срабатывает АБС, вы почувствуете пульсацию педали тормоза, а также услышите скрежет или стон. Поскольку теперь шины имеют сцепление, а не скользят, вы также можете управлять автомобилем, если это помогает избежать столкновения, что невозможно, если колеса заблокированы и скользят.
Электронный контроль устойчивости также работает с антипробуксовочной системой автомобиля. Эта электронная система измеряет скорость вращения колес. Если кто-то вращается быстрее, что может указывать на то, что он на скользкой поверхности, система контроля тяги активирует тормоз на этом колесе, а также может на мгновение снизить мощность двигателя, помогая вращающейся шине восстановить сцепление с дорогой.(Иногда вам нужно немного покрутить колеса, например, когда вы пытаетесь выбраться из глубокого снега, поэтому рекомендуется выключить антипробуксовочную систему, если вы застряли.)
И ABS, и антипробуксовочная система. в первую очередь предназначены для продвижения вперед. Если что-то начинает уходить в сторону, тогда на помощь приходит ESC. Это зависит в первую очередь от трех датчиков, которые измеряют рыскание, скорость колес и угол поворота.
Датчик рыскания расположен в центре транспортного средства и, как следует из названия, измеряет рыскание — насколько транспортное средство перемещается влево или вправо от своей вертикальной оси.Затем система сравнивает это с углом поворота — направлением передних колес и тем, как далеко вы их повернули. Если вы повернули колеса влево, а машина послушно поворачивает в ту сторону, то все хорошо.
Но если датчики обнаруживают, что ваши колеса повернуты влево, а машина движется вправо, они понимают, что вы заносите боком. Чтобы помочь вам выйти из этого, он использует некоторые или все компоненты из систем ABS и контроля тяги, включая торможение определенных колес и снижение мощности двигателя, чтобы вернуть все в соответствие с направлением колес и вернуть водителя. в управлении автомобилем.Он работает, когда передние или задние колеса теряют сцепление с дорогой и автомобиль начинает заносить. Он постоянно контролирует автомобиль в любых погодных условиях и автоматически включается при необходимости. Его можно временно отключить на некоторых моделях, но он вернется к значению по умолчанию при следующем запуске двигателя.
Система очень эффективна, и исследования Министерства транспорта Канады показывают, что количество ДТП, вызванных потерей управления водителями из-за этого, снизится на 29 процентов. Но он может сделать очень многое, и пока можно только спорить с законами физики.Чтобы обеспечить безопасное вождение, убедитесь, что ваши шины в хорошем состоянии, с достаточным протектором и должным образом накачаны. Меняйте полосу движения постепенно, вместо того, чтобы поворачивать колесо, чтобы переехать. Разгоняйте автомобиль медленно и равномерно, а не резко нажимайте на педаль газа, особенно на скользкой дороге. А если вы попадете на гравий или мягкую поверхность, например, на обочину, не нажимайте на тормоза. Вместо этого медленно отпустите дроссельную заслонку и постепенно возвращайтесь на тротуар.
PBS Дискуссионный документ по курсовой устойчивости при торможении переходных договоренностей
Консультации закрыты в пятницу, 12 февраля 2021 г.Мы хотели бы поблагодарить всех, кто нашел время, чтобы оставить отзыв.
Что это?
Целью Стандарта курсовой устойчивости при торможении (DSUB) является управление рисками безопасности, связанными с неустойчивостью транспортного средства при торможении в повороте или на поперечных склонах тротуара. Транспортное средство не должно демонстрировать сильную блокировку колес при любых условиях нагрузки и должно оставаться в прямой полосе движения шириной, равной ширине, указанной в стандартной способности слежения на прямом пути для соответствующего уровня эксплуатации при торможении с расстояния 60 км. /час.Соответствие настоящему стандарту в настоящее время достигается за счет положений о том, что «считается соответствующим» (например, транспортное средство, которое имеет работающую антиблокировочную систему или тормозную систему с пропорциональной нагрузкой, которая эффективно предотвращает сильную блокировку колес на каждой группе осей, считается соответствующим стандарту. ).
Фон
При поддержке проекта PBS Marketplace Национальной транспортной комиссии были сформулированы четыре рекомендации, одна из которых заключалась в том, чтобы NHVR завершил обзор стандартов PBS.Чтобы выполнить эту рекомендацию, NHVR приступила к проекту обзора PBS и наняла консультанта доктора Джона де Понта из TERNZ Transport Research Ltd (TERNZ Transport) для проведения обзора первых трех стандартов, включая требования к характеристикам направленной устойчивости при торможении. NHVR проводил консультации, встречи и семинары с представителями отрасли и юрисдикций, чтобы получить обратную связь на протяжении всего процесса разработки Стандарта.
NHVR предоставляет рекомендованные поправки к этому Стандарту и рекомендации от TERNZ Transport и промышленности, а также ряд переходных мер для управления влиянием, которое изменение может оказать на существующий парк PBS.
Почему мы консультируемся с
Чтобы предоставить отрасли и заинтересованным сторонам достаточно времени для внесения необходимых изменений в бизнес в результате поправок к стандарту DSUB, NHVR предлагает использовать поэтапный подход к реализации.