Конструкция и техобслуживание роботизированной коробки передач Тойота Королла
________________________________________________________________________________________
Роботизированная коробка передач (коробка-робот) автомобилей Тойота Королла, Тойота Аурис разработана на основе пятиступенчатой механической коробки передач.
Для управления на картере коробки передач установлены электроприводы выключения сцепления, выбора и переключения передач. Электроприводами по сигналам датчиков управляет блок управления коробки-робот.
За основу КПП робот Тойота Королла, Тойота Аурис была взята традиционная «механика» оснащенная электроприводами.
Другое известное название этой коробки передач Freetronic — ММТ (Multimode). Роботизированная трансмиссия может работать как в автоматическом режиме, так и в ручном.
Переключение передач в роботизированной коробке происходит при помощи
трех электродвигателей. Один из них отвечает за выключение (выжим)
сцепления, а два других за смену передач.
Один из них отвечает за выключение (выжим)
сцепления, а два других за смену передач.
Работой приводов управляет электронный блок управления (ТСМ), путем обработки сигналов с бесконтактных датчиков.
Рис.8. Общее устройство коробки робот Тойота Королла, Тойота Аурис
1 — индикатор в автомобиле, 2 — концевой выключатель рычага КПП, 3 — привод, 4 — датчик 1-2, 5 — датчик заднего хода, 6 — датчик нейтрали, 7 — датчик частоты вращения (КПП), 8 — датчик положения сцепления, 9 — электронный блок управления MMT — Фритроник.
Выключение и включение сцепления TFT в трансмиссии Freetronic происходит путем управления величиной давления жидкости, которая подводится к главному цилиндру сцепления.
Коробка робот Тойота Королла оснащена датчиками, одни из которых следят
за реальным положением селектора передач, а другие измеряют частоту
вращения первичного вала КПП.
Рычаг переключения оснащен концевыми выключателями упреждающими блок управления о намерениях водителя задействовать рычаг коробки переключения передач.
При наличии неисправностей на панели приборов начинает мигать индикатор. Индикатор также сигнализирует водителю при его попытке неверного переключения.
Принцип работы роботизированной коробки Тойота Королла
До запуска двигателя сцепления всегда включено.
Пуск
— После поворота ключа в положение зажигание (положение КПП – нейтраль) блок ММТ выполняет «выжим» сцепления и можно запускать двигатель.
Начало движения
— При включении первой передачи или передачи заднего хода и нажатии
педали газа, блок ММТ КПП робот Toyota Corolla, Toyota Auris мгновенно
получает
информацию об этом путем сигнала от датчиков и выдает команду
золотниковому клапану на понижение давления, что ведет к включению
сцепления и
автомобиль трогается.
— Для плавного включения сцепления клапан золотника открывается постепенно, и полное его включение происходит после выравнивания частоты вращения коленвала и первичного вала коробки робот.
— Блок в этот момент дает команду на полное открытие канала главного цилиндра сцепления на слив.
Смена передач
— При отпускании педали газа и изменении положения рычага коробки передач робот коробки робот Тойота Королла, соответствующие датчики сообщают об этом в блок ММТ.
— Блок дает команду на «выжим» сцепления. Дальнейшее включение сцепления происходит после получения сигналов от датчиков нейтрали и «концевиков» рычага.
Остановка
— В момент торможения автомобиля входной вал КПП робот начинает вращаться с меньшим числом оборотов (ниже заданной нормы) и блок управления TFT выполняет «выжим» сцепления.
Зуммер
— Включается при возникновении внештатных ситуаций: ошибка при
переключении вниз, попытка начала движения с передачи выше 3-й,
чрезмерная
нагрузка на сцепление, попытка запуска при включенной передаче, открыта
дверь водителя при запущенном двигателе и положении рычага селектора
соответствующее движению вперед или назад ( не нейтраль).
Роботизированная механическая коробка передач Toyota Corolla, Toyota Auris имеет пять передач для движения вперед и одну передачу заднего хода. Выбранная передача отображается на левом информационном дисплее.
Коробка передач оборудована системой блокировки передач для предотвращения неправильного управления коробкой, т.е. переместить рычаг из положения «N» можно лишь нажав на педаль тормоза (ключ зажигания должен находиться в положении «ON»).
На накладке тоннеля пола выполнена шкала режима управления. Выбранный режим управления отображается на левом информационном дисплее.
На шкалу нанесены следующие обозначения: М — движение в ручном режиме.
В этом режиме управление движением автомобиля Тойота Королла происходит
либо с помощью рычага переключения передач (положение«+» — повышение
передачи, положение «-» — понижение передачи), либо с помощью подрулевых
переключателей: R — задний ход.
Переводите рычаг в это положение только после полной остановки автомобиля.
Для перевода рычага селектора из положения «М» или «Е» в положение «R» необходимо нажать на педаль тормоза; Е — движение в режиме Easy.
Оптимальная передача выбирается автоматически в зависимости от положения педали акселератора и скорости автомобиля.
Кроме режима Easy, можно включить режим Es, который обеспечивает более быстрое ускорение автомобиля, чем в режиме Easy.
Чтобы включить режим Es, нажмите на клавишу «М-МТ Es»; чтобы отключить режим, нажмите на клавишу еще раз.
Замена сцепления для автомобиля Тойота Королла с коробкой робот
Механическая неисправность — это повреждение компонентов сцепления. Как правило, это износ и перегрев сцепления, при которых оно теряет свои рабочие функции.
Основной признак износа сцепления — это пробуксовка, которая
ведет к потере крутящего момента на больших скоростях или при резком
старте.
При механических поломках система входит в аварийный режим, переводит передачу на нейтраль, при которой загорается код ошибки. Для устранения неисправности рекомендуется провести замену сцепления в сборе.
Неисправности электросистемы коробки робот Toyota Corolla, Toyota Auris могут быть нескольких видов:
— неисправности в настройке или инициализации сцепления. Характерный показатель — машина дергается при трогании с места.
— сброс в нейтраль при перегреве сцепления. Загорается на табло красный значок в виде шестерни, указывающей на неисправность в трансмиссии.
— Через некоторое время ожидания система опять начинает работать. При проведении диагностики можно узнать характер неисправности по коду ошибки.
Работы по замене сцепления для коробки робот Тойота Королла:
— Снимаем верхнюю часть воздушного фильтра.
— Откручиваем нижнюю часть корпуса воздушного фильтра.
— Отсоединяем разъем датчика массового расхода воздуха, хомуты
воздуховодов и защелки крышки корпуса воздушного фильтра.
— Отвинчиваем нижнюю часть корпуса воздушного фильтра.
— Вынимаем болт крепления подушки коробки-робот коробки робот Тойота Королла, Тойота Аурис.
— Откручиваем верхние болты крепления КПП.
— Откручиваем болт крепления подушки коробки, но не вынимаем его.
— Отсоединяем все разъемы от КПП робот Тойота Королла. Затем откручиваем верхние болты крепления.
— Демонтируем ступичные гайки для снятия приводов. Откручиваем болт и две гайки крепления шаровой опоры.
— Откручиваем ступичные гайки и крепления шаровой опоры к рычагу для снятия приводных валов. Предварительно сливаем масло из КПП.
— Устанавливаем упорные стойки на коробку и двигатель для того, чтобы он не провисал и немного приподнимаем коробку для демонтажа верхнего болта крепления коробки, который уже откручен сверху.
— Откручиваем болты крепления по кругу и отодвигаем коробку от
двигателя.
— Снимаем неисправное сцепление с коробки робот Тойота Королла.
— Проверяем маховик на износ. Износ не должен превышать 0,3-0,5 мм. И его поверхность должна быть ровной и гладкой.
— Проводим замену выжимного подшипникам сцепления.
— Устанавливаем новое сцепление на маховик и центруем диск сцепления.
— Монтируем коробку в обратном порядке.
Снятие и установка селектора управления роботизированной коробкой передач Toyota Corolla, Toyota Auris
— Снимите облицовку тоннеля пола.
— Выверните четыре болта крепления селектора управления роботизированной коробкой передач.
— Сожмите фиксатор и отсоедините колодку жгута проводов от датчика положения селектора управления роботизированной коробкой передач.
— Сожмите фиксатор и отсоедините колодку жгута проводов от лампы подсветки селектора управления роботизированной коробкой передач.
— Снимите селектор управления роботизированной коробкой передач.
— Установите все снятые детали в порядке, обратном снятию.
________________________________________________________________________________________
________________________________________________________________________________________
_________________________________________________________________________________________
_________________________________________________________________________________________
_________________________________________________________________________________________
- Сигнализация Starline A6
- Сигнализация Starline A8
- Сигнализация Starline A63
- Сигнализация Starline A92
- Сигнализация Starline A94
- Сигнализация Starline B6
- Сигнализация Starline B92
- Сигнализация Starline B94
- Сигнализация Starline E90 E91
_________________________________________________________________________________________
- Двигатель Toyota 3S-FE
- Двигатель Toyota 3S-GE
- Двигатель Toyota 4A-FE, 5A-FE
- Двигатель Toyota 4A-GE
- Двигатель Toyota 1AZ-FE
- Двигатель Mitsubishi 4G63
- Двигатель Mitsubishi 4G69
- Двигатель Mitsubishi 4G15
- Двигатель Mitsubishi 4G18
- Двигатель Mitsubishi 4M40
- АКПП ZF 5HP19
- АКПП ZF 6HP26 Ауди
- АКПП ZF 6HP19
- АКПП U250E
- АКПП Mitsubishi A4BF3
- Вариатор CVT
- АКПП Aisin Warner AW60-40LE
- АКПП Mitsubishi A4BF3
- Ремонт Kia Rio
- Ремонт Nissan Almera
- Ремонт Opel Astra
- Ремонт Renault Duster
- Ремонт Renault Logan
- Ремонт Renault Megane
- Ремонт Renault Megane 2
- Ремонт Renault Sandero Stepway
- Ремонт Renault Scenic
- Ремонт Toyota Corolla
- Ремонт Volkswagen Polo
- Ремонт Ford Focus
- Ремонт Ford Focus 2
- Ремонт Ford Fusion
- Ремонт Ford Mondeo
- Ремонт ВАЗ-2110
- Ремонт Лада Гранта
- Ремонт Лада Калина
Роботизированная МКПП для Peugeot и Citroёn
07. 09.2021
09.2021
2607
В 2006 году на автомобилях Peugeot и Citroёn появилась роботизированная трансмиссия EGS. EGS – это аббревиатура, расшифровывается как electronic gear shift. Электронное переключение передач.
Данная трансмиссия является типичным «роботом». По сути это 6-ступенчатая двухвальная механическая коробка передач, оснащенная автоматикой, которая управляет однодисковым сцеплением и выбором передач.
Данный робот предлагался для дизельных моторов 1.6 HDI и 2.0 HDI, также для 2,0-литрового бензинового двигателя (EW10A), а позже и для 1,6-литрового турбомотора (EP6).
Трансмиссия EGS получила широкое распространение на Citroёn C3, C4, С5, на минивэнах Picasso, также она появилась на Berlingo и Citroёn DS3 и DS5. Разумеется, этот «робот» устанавливали почти на всех моделях Peugeot: 207 и 208, 308 и 3008, 5008 и 508, RCZ и Partner.
На нашем YouTube-канале вы можете посмотреть разборку роботизированной КПП EGS6, снятой с Citroёn C4 Picasso.
Выбрать и купить роботизированную КПП для Peugeot, КПП-робот для Citroёn, вы можете в нашем каталоге контрактных КПП.
Идентификация трансмиссии EGS
Трансмиссия EGS имеет 3 варианта передаточных чисел передач в зависимости от двигателя, для которого она предназначена. Передаточные числа для дизельных моторов 1.6 HDI и 2.0 HDI абсолютно одинаковые, а для бензиновых 2.0 и 1.6 THP набор пар оригинальный. Обозначение коробки передач находится снизу на ее картере, рядом с бачком гидравлической жидкости.
|
Обозначение двигателя |
DV6TED4 / 9HZ |
EW10A / RFJ |
DW10BTED4 / RHR |
EP6DT / 5FX |
||
|
Диапазон коробки передач |
|
МСР/С |
|
МСР/А |
МСР / D |
МСР / B |
|
Обозначение коробки передач |
|
20DS03 |
|
20DS05 |
20DS04 |
20DS16 |
|
|
20DS08 |
|
20DS09 |
20DS10 |
20DS39 |
|
|
|
20DS12 |
|
20DS14 |
20DS13 |
20DS48 |
|
|
|
20DS18 |
|
20DS20 |
20DS19 |
|
|
|
|
20DS22 |
|
20DS24 |
20DS23 |
|
|
|
|
20DS26 |
|
20DS28 |
20DS27 |
|
|
|
|
20DS32 |
|
20DS34 |
20DS33 |
|
|
|
|
20DS36 |
|
20DS38 |
20DS37 |
|
|
|
|
20DS41 |
|
20DS43 |
20DS42 |
|
|
|
|
20DS45 |
|
20DS47 |
20DS46 |
|
|
Замена масла
В данной трансмиссии используется 2 типа масла. Шестеренки и валы передач смазываются трансмиссионной минералкой с вязкостью 75W-80. А в сервоприводе используется специальное полусинтетическое масло для гидроприводов, которое выпускают несколько производителей. Эти масла недорогие. Масло в трансмиссионной части меняется элементарно: сливная пробка внизу, а заливная сверху – это отверстие сообщения с атмосферой.
Шестеренки и валы передач смазываются трансмиссионной минералкой с вязкостью 75W-80. А в сервоприводе используется специальное полусинтетическое масло для гидроприводов, которое выпускают несколько производителей. Эти масла недорогие. Масло в трансмиссионной части меняется элементарно: сливная пробка внизу, а заливная сверху – это отверстие сообщения с атмосферой.
Для замены масла в гидроприводе нужно использовать диагностическое ПО для выполнения обязательных процедур. Для работы гидропривода используется около литра масла, но при замене удается выкачать только половину этого объема. Т.к. масло недорогое, а процедура замены несложная, то многие владельцы делают две замены масла подряд, чтобы максимально разбавить старое масло, остающееся в гидроприводе.
Надёжность «робота» Peugeot и Citroёn EGS
Что можно сказать о надёжности данной трансмиссии? На зависть всем конкурентам этот «робот» оказался вполне надёжным и беспроблемным. Он неплохо настроен, переключает передачи бодро и практически не ломается. Многие проблемы в виде толчков при смене передач и откровенных ударов, напоминающих брошенную педаль сцепления, можно решить заменой масла в сервоприводе. Производитель не регламентирует замену масла в нем, только упоминает о необходимости проверки его уровня. Со временем масло накапливает влагу, также система немного завоздушивается, что и приводит к нервным переключениям передач. Также восстановить плавную смену передач помогает процедура инициализации, в ходе которой адаптируется точка касания сцепления.
Он неплохо настроен, переключает передачи бодро и практически не ломается. Многие проблемы в виде толчков при смене передач и откровенных ударов, напоминающих брошенную педаль сцепления, можно решить заменой масла в сервоприводе. Производитель не регламентирует замену масла в нем, только упоминает о необходимости проверки его уровня. Со временем масло накапливает влагу, также система немного завоздушивается, что и приводит к нервным переключениям передач. Также восстановить плавную смену передач помогает процедура инициализации, в ходе которой адаптируется точка касания сцепления.
Данная трансмиссия прекрасно диагностируется – практически по любой неисправности фиксируются конкретные ошибки. Главная проблема этого робота в том, что специалистов по его ремонту и обслуживанию мало. Мы постараемся рассказать о проблемах, которые возникают с этой трансмиссией.
Выход из строя гидропривода
Гидравлический привод робота EGS чувствителен к уровню масла.![]() Его уровень может снизится из-за утечки в выжимном подшипнике, в гидравлической линии, по датчику давления масла и даже через отверстия в маслозаливной горловике. В этом случае увеличивается нагрузка на электрический гидронасос. Она начинает работать практически постоянно, не выдерживает нагрузки, перегревается, выходит из строя. В результате «робот» не может включить нужную передачу, остается на нейтральной передаче. Но трансмиссия может оживать после перезапуска мотора. Но в таком случае лучше ехать на СТО на эвакуаторе, т.к. работа с недостаточным уровнем масла может прикончить гидравлический узел или электромотор. Электромотор можно отремонтировать – если в нем удачно вышли из строя угольные щетки или сгорел якорь, который можно перемотать. А вообще работоспособность «робота» EGS можно восстановить доливкой масла.
Его уровень может снизится из-за утечки в выжимном подшипнике, в гидравлической линии, по датчику давления масла и даже через отверстия в маслозаливной горловике. В этом случае увеличивается нагрузка на электрический гидронасос. Она начинает работать практически постоянно, не выдерживает нагрузки, перегревается, выходит из строя. В результате «робот» не может включить нужную передачу, остается на нейтральной передаче. Но трансмиссия может оживать после перезапуска мотора. Но в таком случае лучше ехать на СТО на эвакуаторе, т.к. работа с недостаточным уровнем масла может прикончить гидравлический узел или электромотор. Электромотор можно отремонтировать – если в нем удачно вышли из строя угольные щетки или сгорел якорь, который можно перемотать. А вообще работоспособность «робота» EGS можно восстановить доливкой масла.
Недостаточное давление масла
Внутри гидравлического блока управления находится датчик давления масла. Иногда он выходит из строя, из-за чего, как правило, электронасос начинает работать чаще и с перегрузками, при этом фиксируются ошибки по недостаточному давлению масла, коробка не будет включать передачи. Вычислить неисправный датчик можно только по сравнению фактического и измеренного датчиком давления масла.
Иногда он выходит из строя, из-за чего, как правило, электронасос начинает работать чаще и с перегрузками, при этом фиксируются ошибки по недостаточному давлению масла, коробка не будет включать передачи. Вычислить неисправный датчик можно только по сравнению фактического и измеренного датчиком давления масла.
Датчик положения выжимного подшипника
Робот EGS может прекратить включать передачи и оставаться на нейтралке из-за неисправности датчика перемещения выжимного подшипника. На это указывает соответствующая ошибка. Проблема может быть как в самом датчике, так и в его проводке или разъеме. Датчик является одной деталью с выжимным подшипником, которая стоит $115-130. На замену нужно выбирать деталь от хорошего производителя или оригинал, т.к. нередко некоторые новые подшипнки и датчики служат совсем не долго или сразу приводят к проблемам.
Датчик селектора РКПП
Робот EGS может зависать на одной из передач и не переключаться на другие. Как правило, в этом случае виноват датчик положения селектора. Более точно на виновника неполадки укажет зафиксированная ошибка.
Как правило, в этом случае виноват датчик положения селектора. Более точно на виновника неполадки укажет зафиксированная ошибка.
Датчик оборотов
Из-за неисправности датчиков оборотов входного и выходного вала этот «робот» переходит в аварийный режим, фиксируется ошибка по одному из датчиков. Но помимо выхода из строя датчика проблема может заключаться в его проводке и даже в контактах в разъеме блока управления.
Утечка гидравлической жидкости
Иногда робот EGS течёт гидравлической жидкостью из-за износа одного из гидроклапанов. В этом случае утечка хорошо видна, может появиться лужа под машиной. Для ремонта придется устанавливать новый или б/у блок клапанов.
Выход из строя ЭБУ
Также возможен выход из строя ЭБУ из-за попадания влаги в его разъемы. Обычно влага ему никак не может навредить, но если разъемы неудачно снимались, был утерян уплотнитель, то влага попадет к пинам. В этом случае блок управления будет сыпать самыми разнообразными ошибками. Иногда удается высушить блок и вернуть его в строй без ремонта.
В этом случае блок управления будет сыпать самыми разнообразными ошибками. Иногда удается высушить блок и вернуть его в строй без ремонта.
Также многие электрический неполадки в работе этой трансмиссией вызваны проблемами с электропроводкой под капотом, пропаданием контактов, а также неисправностями с тормозной системой. Эта коробка передач уходит в аварийный режим из-за поломки или отсутствия питания на концевике педали тормоза и при отсутствии сигналов с датчиков ABS.
Износ подшипников
Механическая часть робота EGS довольно надёжна, но иногда ее приходится разбирать для замены изношенных передних подшипников валов. Об износе говорит гул из трансмиссии на нескольких передачах или на всех передачах, это происходило при пробеге в 150 000 км. Есть мнение, что подшипники изнашиваются из-за разрушения дефлекторов (2106.28 и 2315.21), через которые к ним поступает смазка. Замена подшипников не сложная, они доступны в продаже единым ремкомплектом (2299. 64), в котором порядка 10 деталей, или по отдельности.
64), в котором порядка 10 деталей, или по отдельности.
Выбрать и купить АКПП для Peugeot, АКПП для Citroёn, вы можете в нашем каталоге контрактных КПП.
Здесь по ссылкам вы можете посмотреть наличие на авторазборке конкретных автомобилей Peugeot, Citroёn и заказать с них автозапчасти.
Вернуться к списку новостей
07.09.20212607
Как мне управлять своим роботом? | Сообщество RobotShop
Введение
Существует много разных способов общения с роботом. Роботы чаще всего управляются с помощью троса (проводного), беспроводного или автономного. Привязанный Самый простой способ управления роботом — это использование портативного контроллера, физически подключенного к роботу с помощью проводов или кабеля. Тумблер
- Основы: как мне управлять своим роботом? Основы
: как мне управлять своим роботом?
Есть много разных способов общения с роботом. Роботы чаще всего управляются с помощью троса (проводного), беспроводного или автономного. Привязанный Самый простой способ управления роботом — это использование портативного контроллера, физически подключенного к роботу с помощью проводов или кабеля. Тумблеры на контроллере позволяют управлять роботом без использования электроники и напрямую подключать двигатели и аккумулятор. У таких роботов обычно нет интеллекта. Автономные подводные аппараты, как правило, используют для связи оптоволоконные кабели, в то время как наземные роботы используют металлическую (медную) проводку. Следующим шагом будет включение микроконтроллера в вашего робота, но продолжайте сохранять привязь. Подключив микроконтроллер к одному из портов ввода-вывода вашего компьютера (последовательному или USB), вы сможете управлять его действиями с помощью клавиатуры (клавиатуры), джойстика или другого периферийного устройства. Включение микроконтроллера в ваш проект позволяет получить опыт, который понадобится при программировании робота для дистанционного управления и впоследствии автономного управления.
Роботы чаще всего управляются с помощью троса (проводного), беспроводного или автономного. Привязанный Самый простой способ управления роботом — это использование портативного контроллера, физически подключенного к роботу с помощью проводов или кабеля. Тумблеры на контроллере позволяют управлять роботом без использования электроники и напрямую подключать двигатели и аккумулятор. У таких роботов обычно нет интеллекта. Автономные подводные аппараты, как правило, используют для связи оптоволоконные кабели, в то время как наземные роботы используют металлическую (медную) проводку. Следующим шагом будет включение микроконтроллера в вашего робота, но продолжайте сохранять привязь. Подключив микроконтроллер к одному из портов ввода-вывода вашего компьютера (последовательному или USB), вы сможете управлять его действиями с помощью клавиатуры (клавиатуры), джойстика или другого периферийного устройства. Включение микроконтроллера в ваш проект позволяет получить опыт, который понадобится при программировании робота для дистанционного управления и впоследствии автономного управления. Обратите внимание, что микроконтроллеры не способны обеспечить достаточную мощность для двигателей и поэтому нуждаются в контроллере двигателя в качестве посредника. Wireless Инфракрасные передатчики и приемники используются для перерезания кабелей, соединяющих робота с пользователем. Обычно это личная веха для начинающих роботов. Для работы инфракрасного управления требуется «прямая видимость»; приемник должен постоянно видеть передатчик. Инфракрасные пульты дистанционного управления (например, универсальные пульты дистанционного управления) часто используются для управления действиями робота. Имеющиеся в продаже устройства дистанционного управления (R/C) используют небольшие микроконтроллеры в передатчике и приемнике для отправки, получения и интерпретации данных через радиочастоту. В коробке приемника также находится контроллер серводвигателя. Для RF требуется либо передатчик, согласованный с приемником, либо приемопередатчик (который может как отправлять, так и получать данные).
Обратите внимание, что микроконтроллеры не способны обеспечить достаточную мощность для двигателей и поэтому нуждаются в контроллере двигателя в качестве посредника. Wireless Инфракрасные передатчики и приемники используются для перерезания кабелей, соединяющих робота с пользователем. Обычно это личная веха для начинающих роботов. Для работы инфракрасного управления требуется «прямая видимость»; приемник должен постоянно видеть передатчик. Инфракрасные пульты дистанционного управления (например, универсальные пульты дистанционного управления) часто используются для управления действиями робота. Имеющиеся в продаже устройства дистанционного управления (R/C) используют небольшие микроконтроллеры в передатчике и приемнике для отправки, получения и интерпретации данных через радиочастоту. В коробке приемника также находится контроллер серводвигателя. Для RF требуется либо передатчик, согласованный с приемником, либо приемопередатчик (который может как отправлять, так и получать данные). RF не требует прямой видимости, а также может обеспечить значительный диапазон. Радиочастотные устройства могут обеспечивать передачу данных между устройствами на расстоянии до нескольких километров. Bluetooth является формой RF и следует определенным протоколам для отправки и получения данных. Радиус действия Bluetooth часто ограничен, хотя у него есть то преимущество, что пользователи могут управлять своим роботом через устройства с поддержкой Bluetooth, такие как сотовые телефоны, КПК и ноутбуки (хотя может потребоваться дополнительное программирование). Bluetooth предлагает двустороннюю связь. Автономный Следующим шагом является использование микроконтроллера в вашем роботе на полную мощность и программирование его реакции на входные данные от его датчиков. Микроконтроллеры не способны обеспечить достаточную мощность двигателей и поэтому нуждаются в контроллере двигателя в качестве посредника. Микроконтроллеры необходимы для удаленного и автономного управления. Микроконтроллер считается «мозгом» настоящего робота и позволяет программировать поведение вашего робота.
RF не требует прямой видимости, а также может обеспечить значительный диапазон. Радиочастотные устройства могут обеспечивать передачу данных между устройствами на расстоянии до нескольких километров. Bluetooth является формой RF и следует определенным протоколам для отправки и получения данных. Радиус действия Bluetooth часто ограничен, хотя у него есть то преимущество, что пользователи могут управлять своим роботом через устройства с поддержкой Bluetooth, такие как сотовые телефоны, КПК и ноутбуки (хотя может потребоваться дополнительное программирование). Bluetooth предлагает двустороннюю связь. Автономный Следующим шагом является использование микроконтроллера в вашем роботе на полную мощность и программирование его реакции на входные данные от его датчиков. Микроконтроллеры не способны обеспечить достаточную мощность двигателей и поэтому нуждаются в контроллере двигателя в качестве посредника. Микроконтроллеры необходимы для удаленного и автономного управления. Микроконтроллер считается «мозгом» настоящего робота и позволяет программировать поведение вашего робота. Робот может управляться автономно (без участия пользователя) или полуавтономно (некоторый ввод пользователя). Полуавтономное управление предполагает передачу/программирование некоторых процессов принятия решений роботу. Автономное управление может осуществляться в различных формах: предварительно запрограммированное без обратной связи с окружающей средой, с ограниченной обратной связью от датчиков и, наконец, со сложной обратной связью от датчиков. Истинное «автономное управление» включает в себя множество датчиков и предварительно написанный код, позволяющий роботу самостоятельно определять наилучшие действия в любой конкретной ситуации. Самые сложные автономные мобильные роботы в настоящее время используют GPS-навигацию, системы обзора и различные бортовые датчики, помогающие им ориентироваться в окружающей среде.
Робот может управляться автономно (без участия пользователя) или полуавтономно (некоторый ввод пользователя). Полуавтономное управление предполагает передачу/программирование некоторых процессов принятия решений роботу. Автономное управление может осуществляться в различных формах: предварительно запрограммированное без обратной связи с окружающей средой, с ограниченной обратной связью от датчиков и, наконец, со сложной обратной связью от датчиков. Истинное «автономное управление» включает в себя множество датчиков и предварительно написанный код, позволяющий роботу самостоятельно определять наилучшие действия в любой конкретной ситуации. Самые сложные автономные мобильные роботы в настоящее время используют GPS-навигацию, системы обзора и различные бортовые датчики, помогающие им ориентироваться в окружающей среде.
 ARC для ПК с Windows
ARC для ПК с Windows  Видение — Обучение и распознавание объектов
Видение — Обучение и распознавание объектов 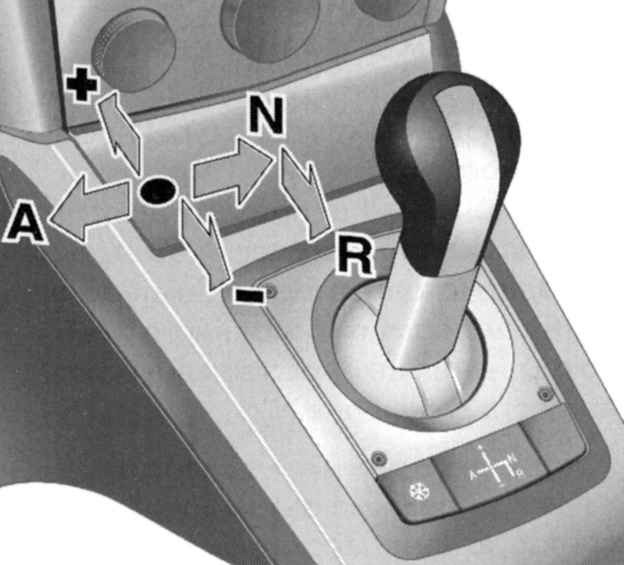 Режимы EZ-B v4 и IoTiny Wi-Fi
Режимы EZ-B v4 и IoTiny Wi-Fi  Выбор элемента управления добавит его в ваш проект.
Выбор элемента управления добавит его в ваш проект.