1.3 Виды механизмов
Исходя из кинематических, конструктивных и функциональных свойств, механизмы подразделяют на рычажные, кулачковые, фрикционные, зубчатые и др.
Рычажные механизмы. Рычажными называют механизмы с геометрическим замыканием (запиранием) звеньев во вращательных и поступательных кинематических парах.
Благодаря этому они могут передавать большие усилия и мощности, чем другие механизмы в аналогичных условиях. Звенья механизмов сравнительно просты в изготовлении.
Механизмы применяют в основном для преобразования вращательного движения входного звена в качательное и возвратно-поступательное движение выходного звена.
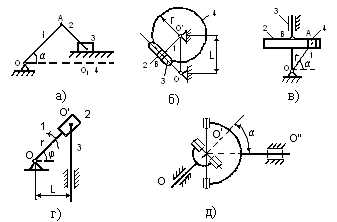
Рычажные механизмы делятся на плоские и пространственные. Среди этого типа механизмов наибольшее распространение получили кривошипно-шатунные (рис.4,а,б) и кулисные (рис.4,в) механизмы. На рис.4 показаны схемы аксиального (рис.4,а) и дезаксиального (рис.4,б) кривошипно-шатунного механизма, используемого для преобразования вращательного движения кривошипа
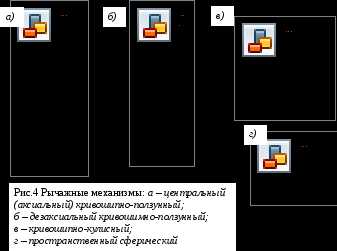
На рис.4, в изображен кривошипно-кулисный механизм. Он состоит из кривошипа 1, кулисы 3, представляющей собой подвижное направляющее звено, и звена 2, называемого кулисным камнем. Если l>r, то вращательное движение кривошипа 1 преобразуется в возвратно-вращательное движение кулисы 3. Когда l<r, то при равномерном вращении кривошипа 1 кулиса 3 вращается с переменной угловой скоростью.
На рис.4,г представлен пространственный сферический механизм с низшими кинематическими парами, который служит для передачи движения между пересекающимися осями под углом α. Этот механизм известен под названием карданной передачи.
Кулачковые механизмы. Механизмы образуются путем силового замыкания звеньев: кулачка и толкателя (коромысла).
Кулачок обычно представляет собой диск (реже цилиндр), профиль которого очерчен определенной кривой, которая строго задает движение толкателю (коромыслу). В зависимости от вида движения сопряженное с кулачком звено называется либо толкателем (рис.5,а,б), либо коромыслом (рис.5,в,г). Кулачок и коромысло соединяют со стойками с помощью вращательных пар, толкатель — поступательной парой. Для уменьшения потерь на трение толкатель и коромысло снабжают цилиндрическими роликами.
Конструктивно силовое замыкание звеньев осуществляют за счет сил упругости (например, от предварительно деформированной пружины), реже — сил тяжести.
Механизмы используют для преобразования вращательного (рис.5,а,в) или возвратно-поступательного движения (рис.5,б) входного звена (ведущего звена) 1 в возвратно-поступательное (рис.5,а,б) или возвратно-вращательное (рис.5,в) движение выходного (ведомого) звена 2 даже с остановками заданной продолжительности.
В механизмах применяют также сложные плоские и пространственные механизмы в комбинациях с рычажными и зубчатыми механизмами.
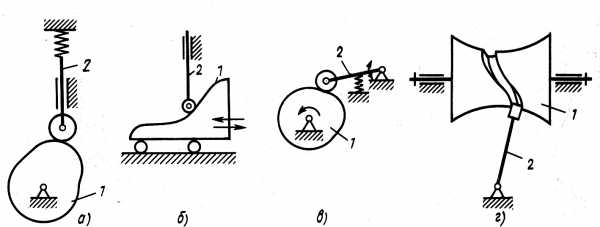
Рис.5. Кулачковые механизмы: а – вращающийся кулачок и толкатель, движущийся возвратно-поступательно; б – возвратно-поступательно движущиеся кулачок и толкатель,; в – вращающийся кулачок и качающийся толкатель; г – пространственный кулачковый механизм
Фрикционные механизмы. В этих механизмах движение от ведущего звена к ведомому передается за счет сил трения, возникающих в результате контакта этих звеньев.
Простейшая фрикционная передача (механизм) показана на рис.6,а. Она состоит из двух цилиндрических катков 1, 2 и стойки 3. Один каток прижимается к другому силой упругости пружины. К фрикционным механизмам относятся и вариаторы (рис.6,б), которые обеспечивают плавное изменение угловой скорости ведомого звена 2 при равномерном вращении ведущего звена 1 и его перемещении вдоль оси. Вариаторы называются бесступенчатыми передачами.
Фрикционный механизм может быть выполнен и с гибкими звеньями. Его применяют для передачи вращения между валами при больших межосевых расстояниях.
Под гибкими звеньями понимают ремни, канаты, цепи, нити. На рис.6, в приведена простейшая передача гибкой связью.
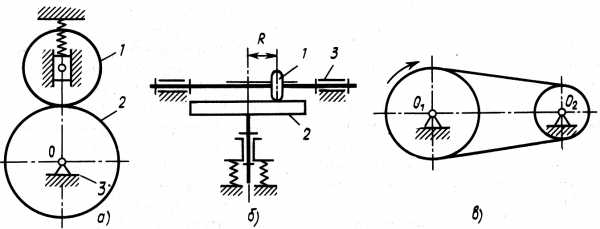
Рис.6. Фрикционные механизмы: а – фрикционная передача; б – лобовой вариатор; г – механизм с гибким звеном
Зубчатые механизмы. Зубчатыми называют механизмы (передачи), образованные с помощью зубчатых колес 1 и 2 — цилиндрических или конических дисков, снабженных выступами — зубьями (рис.7,а).
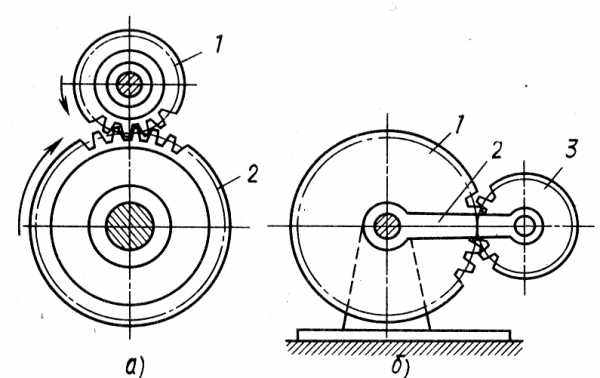
Рис.7. Зубчатые механизмы: а — обычный; б — планетарный
Передача нагрузки и движения между колесами осуществляется за счет воздействия зубьев друг на друга (силового замыкания — зацепления зубьев). В отличие от фрикционной передачи здесь исключено проскальзывание звеньев.
Механизмы широко применяют в машинах для передачи вращения между неподвижными и подвижными осями. В последнем случае механизмы называют планетарными. На рис.7,б показан простейший планетарный механизм. Ось колеса 3, соединенная водилом 2 с осью колеса 1, совершает вращательное движение. Колесо 1 в этом случае называется центральным, а колесо 3 — сателлитом.
Волновые передачи (рис.8) по существу можно было бы назвать планетарными механизмами с гибким сателлитом.
Рис. 8. Схема волновой передачи
В волновых передачах поток мощности распределяется по зонам зацепления с большим числом зубьев по сравнению с другими зубчатыми механизмами. Ролики генератора волн 2 деформируют гибкое колесо 1 при сборке и вводят его зубья в зацепление с зубьями жесткого колеса 3 по большой оси эллипса и выводят из зацепления по малой оси. Движение передается за счет «бегущей волны» деформации гибкого колеса. Число зубьев гибкого колеса меньше, чем у жесткого.
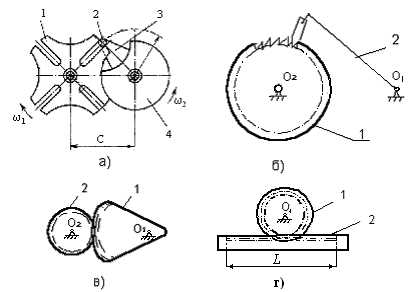
Крестовидный (мальтийский) механизм (рис.9) состоит из трех звеньев. Звено 1 несет на себе цевку, центр А которой удален от оси вращения О на расстояние r, а замок В представлен сектором, очерченным окружностью радиуса
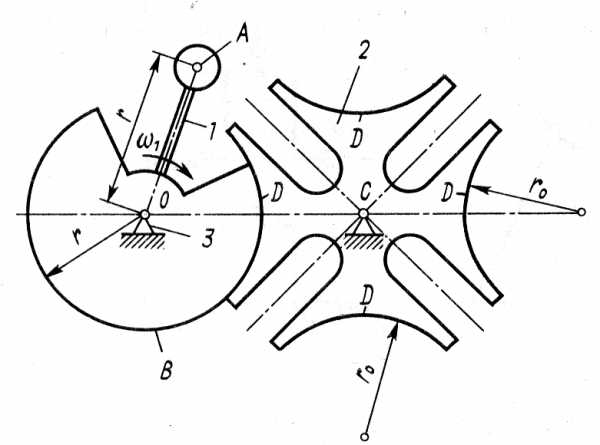
Рис.9. Мальтийский механизм
Гидравлическими и пневматическими механизмами называются такие, в каждом из которых преобразование движения происходит посредством твердых и жидких или твердых и воздушных тел.
На рис.10 приведена схема гидравлического механизма, предназначенного для привода в движение поршня1 с помощью распределителя 2. Жидкость в цилиндр 5 поступает из распределителя в результате поочередного включения электромагнитов 3 и 4. Гидравлическая схема включает в себя также насос 6, бак 7 и клапан 8. В пневматическом механизме насос заменяют источником сжатого воздуха.
studfile.net
Виды механизмов —
Виды механизмов (по функциональному признаку)
1. Механизмы двигателей и преобразователей
2. Передаточные
3. Исполнительные
4. Механизмы управления, контроля
5. Механизмы транспортировки, подачи питания, сортировки.
6. Механизмы автоматического счета, взвешивания и упаковки
готовой продукции.
Несмотря на разницу в функциональных назначениях механизмов отдельных видов, в их строении, кинематике и динамике много общего.
Строение механизмов
Всякий механизм состоит из отдельных деталей (тел). Одни детали являются неподвижными, другие – движутся относительно их.
Каждая подвижная деталь или группа деталей, образующих одну жесткую подвижную систему, носит название подвижного звена механизма.
______ q Деталь – это изделие,
Деталь- это изделие изготовленное из одноименного по марке и названию материала.
Рис.1.8
Все неподвижные детали образуют одну жесткую неподвижную систему тел, называемую стойкой.
Рис1.9
Подвижное соединение двух звеньев называется кинематической парой.
Поверхности, линии, точки звена, по которым это звено может соприкасаться с другим звеном, образуя кинематическую пару, называются элементами звена.
В структурном отношении машина представляет собой единый комплекс механизмов, обеспечивающий выполнение присущих ей функций.
Механизмом называется совокупность звеньев, соединенных кинематическими парами, предназначенными для преобразования одного вида движения в другой..
Звеном механизма называется одна или. несколько жестко соединенных деталей, входящих в состав механизма.
Звено, принимаемое за неподвнжное, называется стойкой. В зависимости от характера движения относительно стойки звенья имеют следующие названия;
кривошип — звено рычажного механизма, совершающее полный оборот вокруг неподвижной оси;
коромысло — вращающееся звено рычажного механизма, которое совершает неполный оборот вокруг неподвижной оси;
шатун — звено рычажного механизма, образующее кинематические пары только с подвижными звеньями;
ползун
кулиса — звено рычажного механизма, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару;
кулачок— звено, профиль которого, имея переменную кривизну, определяет движение ведомого звена.
Входным звеном называют звено, которому сообщается движение, преобразуемое механизмом в движения других звеньев.
Выходным звеном называют звено, совершающее движение, для выполнения которого предназначен механизм.
Между входным и выходным звеньями могут, быть расположены промежуточные звенья.
В каждой паре совместно работающих звеньев в направлении силового потока различают ведущее и ведомое.
В современном машиностроении широкое применение получили механизмы, в состав которых входят упругие (пружины, мембраны и др.) и гибкие (ремни, цепи, канаты и др.) звенья.
Кинематической парой называют соединение двух соприкасающихся звеньев, допускающее их относительное движение. Поверхности, линии, точки звена, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару, называются элементами кинематической пары. Связанная система звеньев, образующих между собой кинематические пары, называется кинематической цепью.
Связанная система звеньев, образующих между собой кинематические пары, называется кинематической цепью.
Цепи могут быть:
а) простые и сложные;
б) открытые и замкнутые;
в) плоские и пространственные.
Механизмы образуются только замкнутыми кинематическими цепями.
einsteins.ru
МАШИНЫ И МЕХАНИЗМЫ | Энциклопедия Кругосвет
Содержание статьиМАШИНЫ И МЕХАНИЗМЫ, механические устройства, облегчающие труд и повышающие его производительность. Машины могут быть разной степени сложности – от простой одноколесной тачки до лифтов, автомобилей, печатных, текстильных, вычислительных машин. Энергетические машины преобразуют один вид энергии в другой. Например, генераторы гидроэлектростанции преобразуют механическую энергию падающей воды в электрическую энергию. Двигатель внутреннего сгорания преобразует химическую энергию бензина в тепловую, а затем в механическую энергию движения автомобиля (см. также ЭЛЕКТРОМАШИННЫЕ ГЕНЕРАТОРЫ И ЭЛЕКТРОДВИГАТЕЛИ; ДВИГАТЕЛЬ ТЕПЛОВОЙ; ТУРБИНА). Так называемые рабочие машины преобразуют свойства или состояние материалов (металлорежущие станки, транспортные машины) либо информацию (вычислительные машины).
Машины состоят из механизмов (двигательного, передаточного и исполнительного) – многозвенных устройств, передающих и преобразующих силу и движение. Простой механизм, называемый полиспастом (см. БЛОКИ И ПОЛИСПАСТЫ), увеличивает силу, приложенную к грузу, и за счет этого позволяет вручную поднимать тяжелые предметы. Другие механизмы облегчают работу, увеличивая скорость. Так, велосипедная цепь, входящая в зацепление со звездочкой, преобразует медленное вращение педалей в быстрое вращение заднего колеса. Однако механизмы, увеличивающие скорость, делают это за счет уменьшения силы, а увеличивающие силу – за счет уменьшения скорости. Увеличить одновременно и скорость и силу невозможно. Механизмы могут также просто изменять направление силы. Пример – блок на конце флагштока: чтобы поднять флаг, тянут за шнур вниз. Изменение направления может сочетаться с увеличением силы или скорости. Так, тяжелый груз можно приподнять, нажимая на рычаг вниз.
ОСНОВНЫЕ ПРИНЦИПЫ РАБОТЫ МАШИН И МЕХАНИЗМОВ
Основной закон.
Хотя механизмы и позволяют получить выигрыш в силе или скорости, возможности такого выигрыша ограничиваются законом сохранения энергии. В применении к машинам и механизмам он гласит: энергия не может ни возникать, ни исчезать, она может быть лишь преобразована в другие виды энергии или в работу. Поэтому на выходе машины или механизма не может оказаться больше энергии, чем на входе. К тому же в реальных машинах часть энергии теряется из-за трения. Поскольку работа может быть превращена в энергию и наоборот, закон сохранения энергии для машин и механизмов можно записать в виде
Работа на входе = Работа на выходе + Потери на трение.
Отсюда видно, в частности, почему невозможна машина типа вечного двигателя: из-за неизбежных потерь энергии на трение она рано или поздно остановится.
Выигрыш в силе или скорости.
Механизмы, как указывалось выше, могут применяться для увеличения силы или скорости. Идеальный, или теоретический, выигрыш в силе или скорости – это коэффициент увеличения силы или скорости, который был бы возможен в отсутствие потерь энергии, обусловленных трением. Идеальный выигрыш на практике недостижим. Реальный выигрыш, например в силе, равен отношению силы (называемой нагрузкой), которую развивает механизм, к силе (называемой усилием), которая прикладывается к механизму.
Механический КПД.
Коэффициентом полезного действия машины называется процентное отношение работы на ее выходе к работе на ее входе. Для механизма КПД равен отношению реального выигрыша к идеальному. КПД рычага может быть очень высоким – до 90% и даже больше. В то же время КПД полиспаста из-за значительного трения и массы движущихся частей обычно не превышает 50%. КПД домкрата может составлять лишь 25% из-за большой площади контакта между винтом и его корпусом, а следовательно, большого трения. Это приблизительно такой же КПД, как у автомобильного двигателя. См. АВТОМОБИЛЬ ЛЕГКОВОЙ.
КПД можно в известных пределах повысить, уменьшив трение за счет смазки и применения подшипников качения. См. также СМАЗКА.
ПРОСТЕЙШИЕ МЕХАНИЗМЫ
Простейшие механизмы можно найти почти в любых более сложных машинах и механизмах. Их всего шесть: рычаг, блок, дифференциальный ворот, наклонная плоскость, клин и винт. Некоторые авторитетные специалисты утверждают, что на самом деле можно говорить всего лишь о двух простейших механизмах – рычаге и наклонной плоскости, – так как нетрудно показать, что блок и ворот представляют собой варианты рычага, а клин и винт – варианты наклонной плоскости.
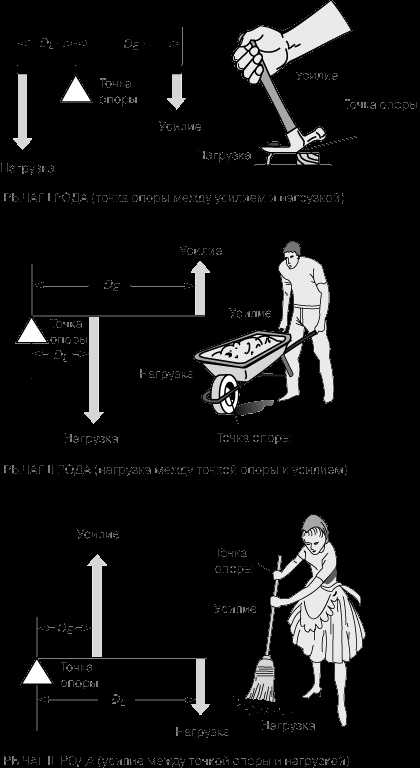
Рычаг.
Это жесткий стержень, который может свободно поворачиваться относительно неподвижной точки, называемой точкой опоры. Примером рычага могут служить лом, молоток с расщепом, тачка, метла.
Рычаги бывают трех родов, различающихся взаимным расположением точек приложения нагрузки и усилия и точки опоры (рис. 1). Идеальный выигрыш в силе рычага равен отношению расстояния DE от точки приложения усилия до точки опоры к расстоянию DL от точки приложения нагрузки до точки опоры. Для рычага I рода расстояние DE обычно больше DL, а поэтому идеальный выигрыш в силе больше 1. Для рычага II рода идеальный выигрыш в силе тоже больше единицы. Что же касается рычага III рода, то величина DE для него меньше DL, а стало быть, больше единицы выигрыш в скорости.
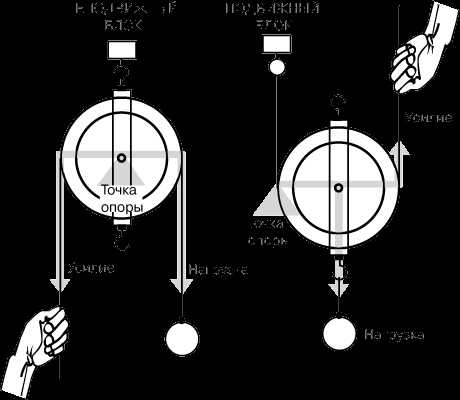
Блок.
Это колесо с желобом по окружности для каната или цепи. Блоки применяются в грузоподъемных устройствах. Система блоков и тросов, предназначенная для повышения грузоподъемности, называется полиспастом. Одиночный блок может быть либо с закрепленной осью (уравнительным), либо подвижным (рис. 2). Блок с закрепленной осью действует как рычаг I рода с точкой опоры на его оси. Поскольку плечо усилия равно плечу нагрузки (радиус блока), идеальный выигрыш в силе и скорости равен 1. Подвижный же блок действует как рычаг II рода, поскольку нагрузка расположена между точкой опоры и усилием. Плечо нагрузки (радиус блока) вдвое меньше плеча усилия (диаметр блока). Поэтому для подвижного блока идеальный выигрыш в силе равен 2.
Более простой способ определения идеального выигрыша в силе для блока или системы блоков – по числу параллельных концов каната, удерживающих нагрузку, как это нетрудно сообразить, взглянув на рис. 2.
Уравнительные и подвижные блоки можно сочетать по-разному для увеличения выигрыша в силе. В одной обойме можно установить два, три или большее число блоков, а конец троса можно прикрепить либо к неподвижной, либо к подвижной обойме.
Дифференциальный ворот.
Это, в сущности, два колеса, соединенные вместе и вращающиеся вокруг одной оси (рис. 3), например, колодезный ворот с ручкой.
Дифференциальный ворот может давать выигрыш как в силе, так и в скорости. Это зависит от того, где прилагается усилие, а где – нагрузка, поскольку он действует как рычаг I рода. Точка опоры расположена на закрепленной (фиксированной) оси, а поэтому плечи усилия и нагрузки равны радиусам соответствующих колес. Пример такого устройства для выигрыша в силе – отвертка, а для выигрыша в скорости – шлифовальный круг.
Зубчатые колеса.
Система двух находящихся в зацеплении зубчатых колес, сидящих на валах одинакового диаметра (рис. 4), в какой-то мере аналогична дифференциальному вороту (см. также ЗУБЧАТАЯ ПЕРЕДАЧА). Скорость вращения колес обратно пропорциональна их диаметру. Если малая ведущая шестерня A (к которой приложено усилие) по диаметру вдвое меньше большого зубчатого колеса B, то она должна вращаться вдвое быстрее. Таким образом, выигрыш в силе такой зубчатой передачи равен 2. Но если точки приложения усилия и нагрузки поменять местами, так что колесо B станет ведущим, то выигрыш в силе будет равен 1/2, а выигрыш в скорости – 2.
Наклонная плоскость.
Наклонная плоскость применяется для перемещения тяжелых предметов на более высокий уровень без их непосредственного поднятия. К таким устройствам относятся пандусы, эскалаторы, обычные лестницы, а также конвейеры (с роликами для уменьшения трения).
Идеальный выигрыш в силе, обеспечиваемый наклонной плоскостью (рис. 5), равен отношению расстояния, на которое перемещается нагрузка, к расстоянию, проходимому точкой приложения усилия. Первое есть длина наклонной плоскости, а второе – высота, на которую поднимается груз. Поскольку гипотенуза больше катета, наклонная плоскость всегда дает выигрыш в силе. Выигрыш тем больше, чем меньше наклон плоскости. Этим объясняется то, что горные автомобильные и железные дороги имеют вид серпантина: чем меньше крутизна дороги, тем легче по ней подниматься.
Клин.
Это, в сущности, сдвоенная наклонная плоскость (рис. 6). Главное его отличие от наклонной плоскости в том, что она обычно неподвижна, и груз под действием усилия движется по ней, а клин вгоняют под нагрузку или в нагрузку. Принцип клина используется в таких инструментах и орудиях, как топор, зубило, нож, гвоздь, швейная игла.
Идеальный выигрыш в силе, даваемый клином, равен отношению его длины к толщине на тупом конце. Реальный выигрыш клина, в отличие от других простейших механизмов, трудно определить. Сопротивление, встречаемое им, непредсказуемо меняется для разных участков его «щек». Из-за большого трения его КПД столь мал, что идеальный выигрыш не имеет особого значения.
Винт.
Резьба винта (рис. 7) – это, в сущности, наклонная плоскость, многократно обернутая вокруг цилиндра. В зависимости от направления подъема наклонной плоскости винтовая резьба может быть левой (A) или правой (B). Сопрягающаяся деталь, естественно, должна иметь резьбу такого же направления. Примеры простых устройств с винтовой резьбой – домкрат, болт с гайкой, микрометр, тиски.
Поскольку резьба – наклонная плоскость, она всегда дает выигрыш в силе. Идеальный выигрыш равен отношению расстояния, проходимого точкой приложения усилия за один оборот винта (длины окружности), к расстоянию, проходимому при этом нагрузкой по оси винта. За один оборот нагрузка перемещается на расстояние между двумя соседними витками резьбы (a и b или b и c на рис. 7), которое называется шагом резьбы. Шаг резьбы обычно значительно меньше ее диаметра, так как иначе слишком велико трение.
КОМБИНИРОВАННЫЕ МЕХАНИЗМЫ
Комбинированный механизм состоит из двух или большего числа простых. Это не обязательно сложное устройство; многие довольно простые механизмы тоже можно считать комбинированными. Например, в мясорубке имеются ворот (ручка), винт (проталкивающий мясо) и клин (нож-резак). Стрелки наручных часов поворачиваются системой зубчатых колес разного диаметра, находящихся в зацеплении друг с другом. Один из наиболее известных несложных комбинированных механизмов – домкрат.
Домкрат (рис. 8) представляет собой комбинацию винта и ворота. Головка винта подпирает нагрузку, а другой его конец входит в резьбовую опору. Усилие прилагается к рукоятке, закрепленной в головке винта. Таким образом, расстояние усилия равно длине окружности, описываемой концом ручки. Длина окружности дается выражением 2pr, где p = 3,14159, а r – радиус окружности, т.е. в данном случае длина ручки. Очевидно, что чем длиннее ручка, тем больше идеальный выигрыш в силе. Расстояние, проходимое нагрузкой за один оборот ручки, равно шагу резьбы. В идеале можно получить очень большой выигрыш в силе, если длинную ручку сочетать с малым шагом резьбы. Поэтому несмотря на малый КПД домкрата (около 25%) он дает большой реальный выигрыш в силе.
Выигрыш в силе, создаваемый комбинированным механизмом, равен произведению выигрышей отдельных механизмов, входящих в его состав. Так, идеальный выигрыш в силе (ИВС) для домкрата равен отношению длины окружности, описываемой ручкой, к шагу резьбы. Для входящего в состав домкрата ворота ИВС равен отношению длины окружности, описываемой ручкой (расстояние усилия), к длине окружности винта (расстояние нагрузки). Для винта домкрата ИВС равен отношению длины окружности винта (расстояния усилия) к шагу резьбы винта (расстоянию нагрузки). Перемножая ИВС отдельных механизмов домкрата, получаем для комбинированного механизма
ИВС = (Окружность ручки/Окружность винта) ґ
(Окружность винта/Шаг резьбы) = (Окружность ручки/Шаг резьбы).
Для более сложных комбинированных механизмов вычислить ИВС труднее. Поэтому для них обычно указывают лишь реальный выигрыш. См. также КУЛАЧКОВЫЙ МЕХАНИЗМ; ДИНАМИКА; СТАНКИ МЕТАЛЛОРЕЖУЩИЕ; МЕХАНИКА.
www.krugosvet.ru
Основные виды механизмов — Лекции и примеры решения задач технической механики
Механизмы, входящие в состав машины, весьма разнообразны. Одни из них представляют собой сочетание только твердых тел, другие имеют в своем составе гидравлические, пневматические тела или электрические, магнитные и другие устройства. Соответственно такие механизмы называются гидравлическими, пневматическими, электрическими и т.д.
С точки зрения их функционального назначения механизмы обычно делятся на следующие виды:
- механизмы двигателей и преобразователей
- передаточные механизмы
- исполнительные механизмы
- механизмы управления, контроля и регулирования
- механизмы подачи, транспортировки, питания и сортировки обрабатываемых сред и объектов
- механизмы автоматического счета, взвешивания и упаковки готовой продукции.
Механизмы двигателей осуществляют преобразование различных видов энергии в механическую работу (например, механизмы двигателей внутреннего сгорания, паровых машин, электродвигателей, турбин и др.).
Механизмы преобразователей (генераторов) осуществляют преобразование механической работы в другие виды энергии (например, механизмы насосов, компрессоров, гидроприводов и др.).
Передаточный механизм (привод) имеет своей задачей передачу движения от двигателя к технологической машине или исполнительному механизму, преобразуя это движение в необходимое для работы данной технологической машины или исполнительного механизма.
Исполнительный механизм – это механизм, который непосредственно воздействует на обрабатываемую среду или объект. В его задачу входит изменение формы, состояния, положения и свойств обрабатываемой среды или объекта (например, механизмы металлообрабатывающих станков, прессов, конвейеров, прокатных станов, экскаваторов, грузоподъемных машин и др.).
Механизмами управления, контроля и регулирования называются различные механизмы и устройства для обеспечения и контроля размеров обрабатываемых объектов (например измерительные механизмы по контролю размеров, давления, уровней жидкости; регуляторы, реагирующие на отклонение угловой скорости главного вала машины и устанавливающие заданную скорость этого вала; механизм, регулирующий постоянство расстояния между валками прокатного стана, и т.д.).
К механизмам подачи транспортировки, питания и сортировки обрабатываемых сред и объектов относятся механизмы винтовых шнеков, скребковых и ковшевых элеваторов для транспортировки и подачи сыпучих материалов, механизмы загрузочных бункеров для штучных заготовок, механизмы сортировки готовой продукции по размерам, весу, конфигурации и т.д.
Механизмы автоматического счета, взвешивания и упаковки готовой продукции применяются во многих машинах, в основном выпускающих массовую штучную продукцию. Надо иметь в виду, что эти механизмы могут быть и исполнительными механизмами, если они входят в специальные машины, предназначенные для этих целей.
Данная классификация показывает лишь многообразие функционального применения механизмов, которая может быть еще значительно расширена. Однако для выполнения различных функций часто применяются механизмы, имеющие одинаковое строение, кинематику и динамику. Поэтому для изучения в теории механизмов и машин выделяются механизмы, имеющие общие методы их синтеза и анализа работы, независимо от их функционального предназначения. С этой точки зрения выделяются следующие виды механизмов:
В пределах данного небольшого курса в основном рассматриваются общие вопросы анализа и синтеза рычажных, зубчатых и кулачковых механизмов. Частично рассматриваются вопросы, связанные с выбором пневмо- и гидропривода.
Механизмы с гибкими связями (ременные и цепные передачи), а также частично фрикционные механизмы и волновые передачи рассматриваются в курсе «Детали машин и основы конструирования»
Определение числа степеней свободы кинематической цепи >
Курсовой проект по ТММ >
isopromat.ru
2. Основные виды механизмов
Исходя из кинематических, конструктивных и функциональных свойств, механизмы подразделяют на рычажные, кулачковые, фрикционные, зубчатые и механизмы прерывистого движения. Рычажными называют механизмы с геометрическим замыканием звеньев во вращательных и поступательных парах /1-5/. К рычажным механизмам относятся кривошипно-ползунный, кулисный, синусный, тангенсный, и пространственно-сферический (рис.2.1).
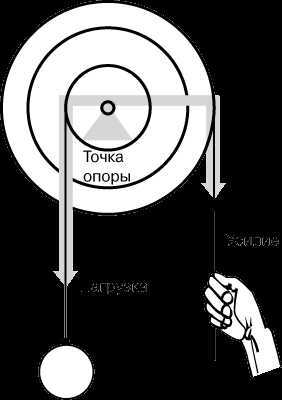
Рис. 2.1. Виды рычажных механизмов
Кривошипно-ползунный
механизм, используемый для преобразования
вращательного движения кривошипа 1
(рис. 2.1.а) в возвратно-поступательное
движение ползуна 3. Ползун и кривошип
соединяются с помощью звена 2, а сам
ползун 3 совершает движение и оказывает
давление на неподвижное звено 4.
Кривошипно-кулисный механизм состоит
из кривошипа 1 (рис. 2.1.б) и кулисы 3,
представляющей собой подвижное
направляющее звено, и звено 2, называемое
кулисным камнем. Если 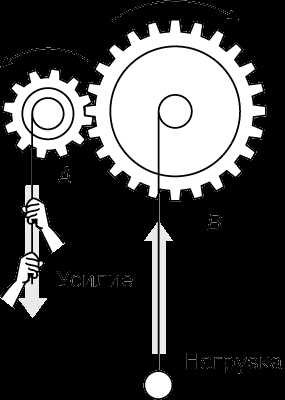 ,
то вращательное движение кривошипа 1
преобразуется в возвратно-вращательное
движение кулисы 3. Когда
,
то вращательное движение кривошипа 1
преобразуется в возвратно-вращательное
движение кулисы 3. Когда ,
то при равномерном вращении кривошипа
1 кулиса 3 вращается с переменной угловой
скоростью. Для синусного механизма
(рис. 2.1.в) при вращении кривошипа 1, точка
А кривошипа двигается по окружности
радиусом
,
то при равномерном вращении кривошипа
1 кулиса 3 вращается с переменной угловой
скоростью. Для синусного механизма
(рис. 2.1.в) при вращении кривошипа 1, точка
А кривошипа двигается по окружности
радиусом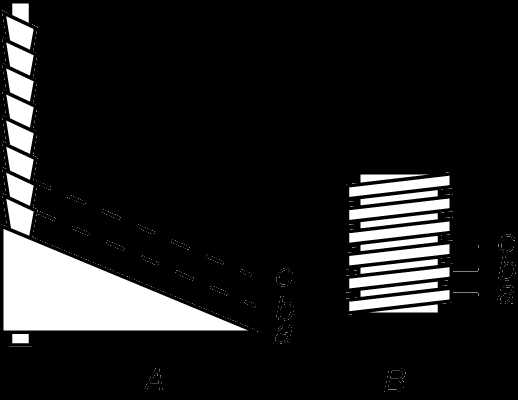 .
Ползун 4 синусного механизма шарнирно
соединен с кривошипом и может перемещаться
по направляющей звена 2, которое в свою
очередь, двигается в неподвижной
прямолинейной направляющей 3. Любая
точка звена 2 совершает возвратно-прямолинейное
движение. Для тангенсного механизма
(рис. 2.1 г) при движении кривошипа 1 ползун
3 совершает возвратно-поступательное
движение. Пространственно-сферический
механизм (рис. 2.1 .д) служит для передачи
движения между пересекающимися осями
под углом,
часто называемый карданной передачей.
Кулачковые механизмы образуются путем
силового замыкания звеньев кулачка 1 и
толкателя (коромысла) 2. Кулачок обычно
представляет собой диск или цилиндр,
профиль которого очерчен определенной
кривой, которая строго задает движение
толкателю (рис. 2.2).
.
Ползун 4 синусного механизма шарнирно
соединен с кривошипом и может перемещаться
по направляющей звена 2, которое в свою
очередь, двигается в неподвижной
прямолинейной направляющей 3. Любая
точка звена 2 совершает возвратно-прямолинейное
движение. Для тангенсного механизма
(рис. 2.1 г) при движении кривошипа 1 ползун
3 совершает возвратно-поступательное
движение. Пространственно-сферический
механизм (рис. 2.1 .д) служит для передачи
движения между пересекающимися осями
под углом,
часто называемый карданной передачей.
Кулачковые механизмы образуются путем
силового замыкания звеньев кулачка 1 и
толкателя (коромысла) 2. Кулачок обычно
представляет собой диск или цилиндр,
профиль которого очерчен определенной
кривой, которая строго задает движение
толкателю (рис. 2.2).
Рис. 2.2. Кулачковые механизмы
В зависимости от вида движения соединенное с кулачком звено называют толкателем (рис. 2.2 а, в). Механизмы используют для преобразования вращательного (рис. 2.2 а, б) или возвратно-поступательного движения (рис. 2.2 в) входного звена в возвратно-поступательное (рис. 2.2 а, в), угловое перемещение (рис 2.2 б) или для движения по сложной пространственной траектории (рис. 2.2 г) выходного звена.
В фрикционных механизмах движение от ведущего звена к ведомому передается за счет сил трения, возникающих в результате контакта этих звеньев. Различают фрикционные передачи с жесткой связью (рис 2.3 а, б) и с гибкими связями (рис. 2.3 в).
Рис. 2.3. Фрикционные механизмы
Простейшая фрикционная передача состоит из двух цилиндрических дисков 1 и 2 (рис. 2.3 а), один из которых прижимается к другому силой упругости пружины, либо из трех дисков с торцевым зацеплением одного из них (рис. 2.3 б). Фрикционный механизм может быть выполнен и с гибкой связью (рис. 2.3 в) для передачи вращательного движения от одного диска к другому, находящемуся на большом расстоянии. Под гибкой связью понимают прямоугольные, клиновидные и круглые ремни, тросы, нити и ленты.
Зубчатыми называют механизмы, образованные зацеплением выступов или зубов, а передача нагрузки и движения между колесами осуществляется за счет воздействия зубьев друг на друга. В отличие от фрикционной передачи здесь исключено проскакивание звеньев.
Зубчатые механизмы состоят из двух колес (рис. 2.4 а) обеспечивающих внешнее зацепление или из двух колес 1 и 2 и дополнительного звена 3, получившего название водила (рис. 2.4 б), обеспечивающего планетарное движение колеса-сателлита 2. Передача, представленная на рис. 2.4 а, представляет простую зубчатую передачу, а на рис. 2.4 б – сложную планетарную зубчатую передачу. Возможны зубчатые механизмы с внутренним зацеплением колес и планетарные передачи, содержащие до трех колес-сателлитов. Планетарную передачу с гибким сателлитом называют волновой и движение в такой передаче передается за счет «бегущей волны» деформации гибкого колеса. К механизмам прерывистого движения относятся, мальтийский механизм, секторная зубчатая передача, реечная зубчатая передача и храповой механизм.
Рис. 2.4. Зубчатые механизмы (а, б) и вид зацепления (в) двух колес
Мальтийские механизмы используют для преобразования непрерывного вращательного движения во вращательное движение с остановками. Такой механизм состоит из мальтийского креста 1 (рис. 2.5 а) и кривошипа 3 с цевкой 2 и фиксатором 4, где ведущим звеном является кривошип с цевкой. Секторный зубчатый механизм состоит ведущего неполнозубого 1 и ведомого полнозубого колеса 2 (рис. 2.5 б).
Храповые механизмы (рис.2.5 в) используют для преобразования вращательного движения во вращательное движение с остановками ведомого звена. Возможно также преобразование возвратно-поступательного движения во вращательное с остановками. Содержат зубчатое колесо 1 и собачку 2. К механизмам прерывистого движения относится реечная зубчатая передача, состоящая из зубчатого колеса 1 и рейки 2 (рис 2.5 г) и осуществляющее движение с остановками.
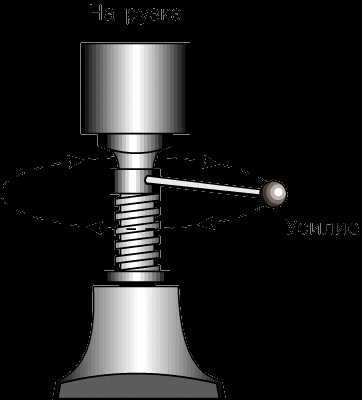
Рис. 2.5. Механизмы прерывистого движения
Реечный механизм служит для преобразования вращательного движения колеса в возвратно-поступательное перемещение рейки.
Данный механизм вместе с зубчатыми передачами и секторным механизмом получили широкое применение в конструкциях современных персональных компьютеров в качестве основных для обеспечения установки и возврата CD- и DVD-дисков и для дальнейшего считывания информации с этих дисков объемом памяти до 4 Гбайт.
Контрольные вопросы
1. Какие существуют основные виды механизмов?
Охарактеризуйте основные звенья рычажных,
кулачковых и фрикционных механизмов?
Какие существуют основные типы кулачковых
механизмов?
Чем определяются различные зубчатые механизмы и
какие звенья образуют кинематические пары?
Какие существуют основные виды механизмов РЭС
прерывистого движения?
В чем различие зубчатых механизмов прерывистого
движения от передаточных механизмов
Какие существуют основные типы рычажных
механизмов?
Для чего предназначены мальтийские механизмы и
какие звенья определяют структуру этих механизмов?
Охарактеризуйте назначение реечной передачи и ее
применение в современных конструкциях РЭС.
Какие существуют основные типы фрикционных
механизмов РЭС?
В чем различие простой и сложной зубчатых передач?
studfile.net
Рычажные механизмы: анализ, типы, применение: устройство, классификация, расчеты
За длительный период было создано просто огромное количество различных механизмов, предназначенных для передачи усилия. Довольно большое распространение получил рычаг. Он характеризуется огромным количеством различных характеристик, которые должны учитываться. Провести точный расчет можно только при рассмотрении всех сил и моментов.

Структурный анализ рычажных механизмов
Проводя исследование рычажного механизма следует уделять внимание возможности выбора двух основных направлений, одно из которых связано с непосредственным анализом, другой синтезом. Оба понятия существенно отличаются друг от друга, что нужно учитывать. Структурный анализ – процесс определения структурных особенностей, который может заключаться в следующем:
- Определении кинематической пары.
- Изучение структур групп.
- Определение особенностей связи кинематической цепи.
Сегодня анализ проводится для определения дефектов структуры, которые в дальнейшем при необходимости могут устраняться.
Каждый случай исследования по-своему уникален. В рассматриваемом случае уделим внимание плоскому рычажному механизму, характеризующийся нерациональной структурой. Его особенности заключаются в нижеприведенных моментах:
- Работоспособность механизма сохраняется исключительно при определенном соотношении длины звеньев. Образующаяся фигура в ходе построения напоминает параллелограмм.
- Для исключения вероятности эксплуатации устройства с дефектами следует точно знать о наличии или отсутствии избыточных взаимосвязях, возможности пассивного распространения и их количества. Стоит учитывать, что они могут возникать исключительно в кинематических цепях замкнутого контура.
- На сегодняшний день выделяют два основных типа контуров: замкнутые и зависимые. Независимым считается вариант исполнения, у которого хотя бы один элемент контура отличается от других.
Зависимые варианты исполнения дублируют друг друга. Для определения числа контура применяется специальная формула.
Также для исключения вероятности появления дефекта проводится расчет количества структурных групп и некоторые другие моменты. В общем можно сказать, что проводимый анализ направлен на достижение следующих задач:
- Построение различных механизмов. При этом проводится определение подвижности и маневренности, так как подобные параметры считаются основными.
- Создание плоских механизмов. Процедура подразумевает анализ состава структуры, а также определяет подвижности.
В целом можно сказать, что преследуемые цели зачастую направлены на определение возможной деформации структуры. Провести полноценный анализ можно только при всестороннем рассмотрении механизма.
Классификация рычажных механизмов
Все рычажные механизмы классифицируются по достаточно большому количеству различных признаков. При этом общими свойствами можно назвать высокий показатель КПД и повышенную нагрузочную способность, простоту функционирования. Простейшие рычажные механизмы встречаются в самых различных областях промышленности. Основная классификация проводится по принципу действия:
- Четырехзвенники.
- Кривошипно-шатунный.
- Кулисные механизмы.
Приведенные примеры могут устанавливаться для достижения самых различных целей.
Примером можно назвать установку для вертикального подъема различных грузов или устройств.
Большое распространение получил коленно-рычажный механизм по причине простоты конструкции и длительного эксплуатационного срока.
Качественные показатели рычажных механизмов
Для формирования общего описания устройства применяются различные качественные показатели, которые могут касаться самых различных моментов. Наиболее распространенными можно назвать:
- КПД считается наиболее важным параметром, который рассматривается при создании самых различных механизмов. Эта безразмерная величина определяет количество энергии, которая применяется для достижения поставленных целей с учетом потерь. Стоит учитывать тот момент, что подобный показатель рычажного механизма находится всегда меньше единицы, то есть при работе возникают потери. При приближении значения КПД к единице существенно снижаются потери, а также повышается качество рычажного механизма. Провести расчет рассматриваемого показателя достаточно сложно, так как для этого требуются самые различные формулы.
- Ход механизма также учитывается при проектировании подходящего устройства. Ход определяется начальной и конечной точкой. При этом стоит учитывать, что в некоторых случаях провести расчеты достаточно сложно, так как траектория движения может быть криволинейной.
- Угол размаха коромысла измеряется путем вычитания двух крайних точек положения на момент работы. В большинстве случаев устройство совершает повторяющееся цикличное движение.
- Коэффициент, отражающий неравномерность распределения средней скорости. Этот показатель определяется соотношением времени холостого хода к рабочему. Провести соответствующие расчеты можно только при применении формул, а также построении чертежа.
- Угол давления и передачи. Подобный параметр представлен соотношением острого угла между векторной активной силы, которая действует на предшествующем звене.
Каждый параметр рассматриваемые в отдельности, после чего составляется оценочный анализ, отражающий общее состояние механизма.
Коленно-рычажный механизм
Современный коленно-рычажный механизм применяется в тех случаях, когда на исполнительный орган следует передать большое усилие, но при этом движущая сила не должна быть большой. При этом часто в качестве привода применяется гидравлика, которая во многом определяет основные свойства конструкции. Достоинствами можно назвать нижеприведенные моменты:
- Высокая скорость перемещения при холостом ходе. За счет этого возникает возможность проводить установку устройства в случае, когда нужно обеспечить быстрый ход подвижного элемента. Примером можно назвать оборудование, предназначенное для фрезерования или точения, так как оно имеет большое количество подвижных узлов, которые должны периодически менять свое положение.
- Небольшие линейные размеры рабочего гидравлического цилиндра. Это свойство определяет возможность создания компактной конструкции. В последнее время больше всего цениться именно компактность, так как оборудование становится все легче и меньше. За счет этого упрощается установка и обслуживание.
- Низкий показатель количества рабочей жидкости в системе. За счет этого существенно снижаются расходы при обслуживании. Время от времени приходится проводить пополнение объема жидкости, так как работа конструкции приводит к его расходу.

Однако, у подобного варианта исполнения есть довольно большое количество недостатков, среди которых отметим:
- Довольно высокая стоимость привода и необходимость в периодическом обслуживании. Именно поэтому устройство устанавливается в том случае, когда нужно провести передачу большого усилия. При производстве рычажного механизма подобного типа применяются материалы с высокой устойчивостью к воздействию окружающей среды.
- Есть вероятность повреждения магистрали, что становится причиной вытекания рабочей жидкости и возникновения других проблем. Конструктивные особенности конструкции определяют то, что есть вероятность возникновения самых различных проблем, к примеру, проскок максимального положения.
Выделяют несколько разновидностей рассматриваемого устройства, все они характеризуются определенными эксплуатационными характеристиками.
Устройство и принцип действия одинарного механизма смыкания
Подобный агрегат представлен сочетанием нескольких конструктивных элементов, за счет которых обеспечивается передача и увеличение усилия. Основными деталями можно назвать:
- Две неподвижные траверсы. Их соединение проводится при помощи цилиндрической колонны.
- Крепление проводится при помощи гаек и контргаек, которые существенно повышают прочность конструкции.
- Передача усилия осуществляется за счет гидравлического цилиндра. Его крепление проводится при помощи шарниров.
- Также есть серьги.
Принцип действия механизма достаточно сложный. Характеризуется он следующим образом:
- Смещение поршня вниз в гидравлическом блоке происходит выпрямление серьги, она совмещается с горизонтальной осью.
- В результате совмещения осей происходит соединение шарниров.
- Шарниры монтируются так, чтобы при контакте расстояние между ними было меньше, чем суммарная длина обеих серег.
- Выпрямление серег происходит за счет распорного усилия.
Приведенная выше информация определяет то, что главным недостатком конструкции становятся нескомпенсированные боковые усилия, которая возникают из-за нагрузки втулок и колонн. Именно поэтому рекомендуется использовать подобный вариант исполнения только в случае передачи небольшого усилия.
Устройство и принцип действия сдвоенного механизма
Наибольшее распространение получила конструкция коленно-рычажный механизма сдвоенного типа. Она состоит из следующих элементов:
- Неподвижной траверсы.
- Гидравлического цилиндра.
- Четыре колоны, служащие для соединения основной части к плите.
- Подвижная плита.
- Пятишарнирный механизм.
- Серьги.
- Шарниры.
- Салазки.
Отличительной особенностью можно назвать наличие пятишарнирного механизма. Он состоит из нижеприведенных деталей:
- Коромысла.
- Короткой серьги.
- Рычага.
- Штока.
- Траверсы.
Гидравлический выталкиватель обеспечивается удаление отлитых изделий из формы. При этом применение пятишарнирного механизма обеспечивает передачу высокого усилия для открытия формы. Увеличить ход плиты при открытии можно за счет изменения передней серьги. Также может проводится изменение расстояния между шарнирами, которые также расположены на неподвижной траверсе. Особые конструктивные особенности конструкции определяют практически полное отсутствие бокового усилия, которое полностью компенсируется. Именно поэтому устройство устанавливается намного чаще, так как вероятность потери груза существенно снижается.
Салазки можно назвать важной частью конструкции. Они требуются для разгрузки колонн от оказываемой нагрузки подвижной плиты. При их изготовлении применяется материал, который характеризуется высокой износостойкостью и другими привлекательными качествами. Точность размеров салазок позволяет исключить существенно отклонение при передвижении подвижного элемента.
Возможные проблемы и важные особенности
При работе рассматриваемого механизма велика вероятность возникновения самых различных проблем. Примером можно назвать проскок положения максимума и многие другие. Для предотвращения проблем следует:
- Проводить своевременное обслуживание.
- Соблюдать технику безопасности.
- Выполнять периодическую замену различных деталей.

Также следует уделять внимание тому, какой период смазки коленно-рычажного механизма. Только при своевременной подаче смазывающего вещества можно существенно снизить степень износа основных элементов. Стоит учитывать, что для рассматриваемого рычажного механизма требуется специальная жидкость, обладающая особыми свойствами.
Проскок положения максимума
Как выше было указано, довольно большое распространение получил случай проскока положения максимума. Среди особенностей этого момента отметим следующее:
- На момент, когда все три шарнира находится на одной линии оказывается наибольшее усилие смыкания.
- В данном положении шток вытянут максимально, неосторожные действия могут стать причиной повреждения конструкции.
- Если конструкция была настроено неправильно, то серьги проскакивают положение крайней точки. Подобное явление становится причиной, по которой шток не может вернуться в первоначальное положение.
На момент максимального перемещения штока оказывается сильное давление, за счет чего возникает вероятность деформации основных элементов. Именно поэтому проскок положения максимума приводит к механическому повреждения станка.
Оверлок
Проблема может возникать также в случае неправильной регулировки рычажного механизма. Примером можно назвать случай, когда усилия цилиндра недостаточно для открытия основных элементов. Особенности проблемы следующие:
- На колонны в большинстве случаев надеваются ленточные нагреватели.
- За счет нагрева до определенной температуры происходит удлинение колонны, за счет чего снижается степень оказываемой нагрузки.
В подобном случае запрещается открывать форму до полного открытия колонн. Это связано с тем, что возникающая нагрузка может стать причиной деформации направляющих элементов. Если они потеряют свою форму, то в дальнейшем существенно усложниться ход подвижных элементов.
Шарнирно-рычажные механизмы
Подобный тип механизма также получил весьма широкое распространение. При этом за его длительный срок эксплуатации было изобретено несколько вариантов исполнения, которые характеризуются своими определенными свойствами. Выделяют следующие виды шарнирно рычажных механизмов:
- С двумя кривошипами.
- Кривошипно-коромысловые.
- Двух коромысловые.
Примером использования варианта исполнения с двумя кривошипами можно назвать перенос тяжелой заготовки с тележки на обрабатывающий станок. Его конструкция характеризуется следующими особенностями:
- В качестве основы применяется две четырехлучевые звездочки, которые фиксируются на валу.
- Также фиксация осуществляется за счет шарнирного соединения с осью и четырьма ложементами. На момент воздействия усилия они создают двухкривошпный механизм, который принимает часть нагрузки.
- Валы фиксируются на подшипниках скольжения, которые расположены в корпусе. При помощи кронштейна они устанавливаются на общей раме, принимающую основную нагрузку.
Именно конструктивные особенности во многом определяют то, где и каким образом может применяться устройство.
Как рассчитать простой рычажный механизм самостоятельно?
Перед непосредственным созданием механизма следует провести расчеты основных показателей, а также построить схему распределения нагрузок. Силовой расчет рычажного механизма проводится после определения исходных данных:
- Создается кинематическая схема массы и моментов, инерции звеньев и положения центров массы.
- Учитывается закон движения механизма.
- Определяется внешнее силовое нагружение.
- Рассчитывается угол перекрытия рычажном механизме.
Проводимый кинематический и силовой предусматривает создание системы координат, которая используется для расчета кинематических характеристик. Кулисно-рычажный вариант исполнения проектируется при создании системы координат и обозначением всех сил. Для проектирования требуется большое количество различных формул, при этом в конце следует выполнить проверку.
Как правило, рассматриваемая работа выполняется инженерами, который учитывают ГОСТ проектирование. Это связано с тем, что структурная формула плоских рычагов выбирается в зависимости от области их применения.
Требования безопасности
При проектировании и монтаже рычажного механизма учитываются требований безопасности. Они во многом зависят от области применения устройства, а также особенностей самого механизма.

Среди особенностей этого момента можно отметить следующее:
- При изготовлении должен подбираться материал, который будет соответствовать всем требованиям. Примером можно назвать высокую коррозионную стойкость. При проектировании указывается то, какой именно материал должен применяться при изготовлении устройства. Часто отдается предпочтение углеродистой стали и легированным сплавам. Некоторые элементы могут быть изготовлены из уплотнительных и других материалов, все зависит то конкретного случая.
- При проектировании учитывается то, каким образом происходит перераспределение нагрузки. Это связано с тем, что в некоторых местах она будет критической.
- Под активным элементом при подъеме тяжелых объектов не должно находится людей, другого оборудования, а также частей самого рычажного механизма. Это связано с высокой вероятностью падения переносимого груза.
- Перед непосредственным применением оборудования следует проводить визуальный осмотр, который позволяет определить наличие или отсутствие повреждений. Кроме этого, должно проводится периодическое обслуживание. Даже незначительный дефект может стать причиной существенного снижения прочности рычажного механизма. Периодическое обслуживание позволяет существенно продлить срок службы устройства.
- Запрещается применять механизм не по предназначению. Перед каждым его использованием проверяется надежность крепления. Нагрузка должна оказываться на конструкцию соответствующим образом, так как в противном случае происходит неправильное перераспределение силы. Именно поэтому при проектировании указывается то, каким образом устройство должно устанавливаться и как использоваться.
- При применении учитывается то, на какую максимальную нагрузку рассчитано оборудование. Слишком высокий показатель может стать причиной, по которой происходит повреждение основных элементов. При проектировании учитывается то, какая нагрузка может оказываться на конструкцию.
Как правило, соответствующее руководство по применению устройства составляется непосредственно на месте его эксплуатации в соответствии с установленными нормами. Это связано с тем, что рычажные механизмы получили весьма широкое распространение, могут устанавливаться в качестве составного узла другого оборудования.
Как показывает практика, механизм смыкания является наиболее травмоопасной частью ТПА. Именно поэтому при его использовании следует уделять больше внимания моменту обеспечения безопасности.
При этом узел оборудован тремя важными независимыми системами:
- Гидравлическая. Эта часть устанавливается в большинстве случаев для передачи усилия. Гидравлика получила весьма широкое распространение, так как она предназначена для непосредственной передачи усилия. Гидравлическая часть основана на подаче специальной жидкости, при помощи которой проводится передача усилия. Гидравлика несет с собой опасность по причине того, что подвижный элементы могут передавать усилие. Поэтому все основные элементы должны быть защищены от воздействия окружающей среды, для чего проводится установка различных кожухов.
- Механическая. Механика отвечает за непосредственную передачу усилия и достижения других целей. Неправильная работа устройства может стать причиной повреждения и деформации. Механика также защищается специальными кожухами, так как попадание посторонних элементов запрещается.
- Электрическая. Для управления механизмом проводится установка электрической части. Она должна быть защищена от воздействия окружающей среды, так как даже незначительное механическое воздействие может стать причиной повреждения магистрали электроснабжения.
Опасность с собой несет и электрическая часть, которая состоит из конечных выключателей. Схема подключения предусматривает использование как минимум двух выключателей, устройство должно обесточиваться в случае выхода из строя одного из них.
Механическая система защиты действует путем прерывания подачи масла в гидравлический цилиндр. При этом проводится слив масла с цилиндра в общую емкость. Подобная система срабатывает даже при незначительном повреждении устройства.
Область применения
Рычажные механизмы получили весьма широкое применение, что прежде всего можно связать с их преимуществами перед другими устройствами, которые устанавливаются для транспортировки грузов и иной передачи усилия. Рассматривая область применения следует уделить внимание следующим моментам:
- Чаще всего рычаг устанавливается для подъема груза. Он является неотъемлемым элементом достаточно большого количества различных устройств, которые приводятся в движение ручной силой.
- Встречаются в производственных цехах, в химической промышленности, в машиностроении и многих других отраслях.
- Область применения ограничивается типом применяемого материала при изготовлении основных частей, принципом действия, а также максимальной возможной нагрузкой, которая оказывается на рабочий орган.
Сегодня рычажные механизмы получили весьма широкое распространение, могут применяться при создании различного оборудования. При этом если важна экономия, то рычаг можно создать своими руками.

В заключение отметим, что провести самостоятельно проектирование рычага достаточно сложно. Это связано с необходимостью применения достаточно большого количества различных формул, построением графиков соответствия и многими другими моментами. Допущенная ошибка может стать причиной повреждения механизма на момент эксплуатации, существенного снижения показателя КПД и возникновения многих других проблем.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
stankiexpert.ru
Выбираем механизмы диванов: какой вид раскладки самый надежный для использования каждый день — Мебельный комплекс Гранд

12.07.2018
Раскладной красивый диван – это не просто предмет мебели в гостиной. Это многофункциональное устройство, позволяющее решать разные задачи и компенсировать недостаток площади помещения. Но многие ли осознают, что выбрать диван — далеко не такой простой шаг, как кажется?
Здоровый сон – неотъемлемая часть жизни человека, в которой он проводит около трети всего своего времени. Вот почему спальное место человека должно полностью отвечать его нуждам и требованиям, быть максимально комфортным и надежным. К сожалению, купить качественную мягкую кровать можно не всегда. Основная тому причина – недостаток свободного пространства в помещении. Зачастую в однокомнатной квартире бывает некуда поставить кресло — не то, что кровать. Да и выглядеть в общей комнате-гостиной кровать будет неуместно. Но диван, как и всякая красивая мягкая мебель, является незаменимым элементом интерьера такого помещения. Отсюда сам собой напрашивается вывод: нужен такой диван, который днем будет частью декора гостиной, местом встречи и времяпрепровождения семьи, а ночью превратится в удобное место для отдыха. И вариант тут один — раскладной диван.
Но тут сразу же возникает вопрос: как выбрать диван в свою квартиру, чтобы он удачно вписался в интерьер и надежно прослужил долгие годы, не превратившись в орудие ночных пыток. Ведь, как мы помним, раскладывать и складывать его придется минимум дважды в сутки. Иными словами, нужно выяснить, какие механизмы зарекомендовали себя как наиболее надежные, а какие, напротив, непригодны для частых раскладываний. И какими вообще преимуществами и недостатками обладают диваны того или иного типа? На сегодняшний день мебельный ассортимент представлен огромным выбором диванов с самыми разными типами трансформации. И у каждой модели есть свои плюсы и минусы.
Рассмотрим их все.
-
Диван с механизмом Эльф
Эльф самый простой и непритязательный вид дивана. Раскладывается он при помощи простого опускания боковин-подлокотников, которые можно зафиксировать в удобном для лежащего положении. Такая возможность расположиться в позиции полулежа создает ортопедический эффект. Этот диван весьма компактен, хотя и рассчитан только на одного человека. В дополнение к этому в нем предусмотрен ящик для спальных принадлежностей.
Раскладывается он при помощи простого опускания боковин-подлокотников, которые можно зафиксировать в удобном для лежащего положении. Такая возможность расположиться в позиции полулежа создает ортопедический эффект. Этот диван весьма компактен, хотя и рассчитан только на одного человека. В дополнение к этому в нем предусмотрен ящик для спальных принадлежностей. -
Диван с механизмом Книжка
Диван книжка ясно из названия, что этот вид трансформируется по аналогии с раскрытием книги. Для превращения его в место для отдыха нужно поднять сиденье. Спинка уйдет вниз, приняв горизонтальное положение. Затем сиденье опускается обратно. Механизмы трансформации подобного типа считаются самыми выносливыми из всех существующих. К тому же, у этих моделей внизу предусмотрен ящик для спальных принадлежностей. Но есть у них и определенные недостатки. Из-за особенностей трансформации их не получится придвинуть вплотную к стене. К тому же, в разложенном состоянии они не особо просторные. Но самое неприятное, что в месте состыковки спинки и сиденья со временем образуется щель, мешающая комфортно спать. -
Диван с механизмом Евронижка
Диван-еврокнижка. Несмотря на схожесть в названии с предыдущим типом, эта модель раскладывается по-другому. Сиденье выдвигается или выкатывается вперед, а на освободившееся пространство опрокидывается мягкая спинка. В результате образуется весьма просторное место для отдыха с ящиком для спальных принадлежностей внизу. Особенности конструкции позволяют плотно придвинуть его к стене. А простота механизма делает его долговечней модели предыдущего типа. Однако в сложенном виде подобные диваны неудобны: сиденье у них слишком широкое, потому откидываться на спинку не очень комфортно. -
Диван с механизмом Танго (клик-кляк)
Танго (клик-кляк) – это стильный диван, являющийся усовершенствованной версией «книжки». Раскладывается он по тому же принципу: сиденье поднимается, опуская спинку, после чего опускается обратно. Примечательной особенностью этого вида являются удобные раскладные боковины, которые можно опускать для увеличения площади спального места или поднимать, чтобы сделать подлокотники. Другой особенностью этого дивана является возможность трансформировать спинку в полуразложенное состояние. Несмотря на кажущуюся сложность, механизм этого дивана также отличается долговечностью. Плюс внизу имеется отсек для хранения белья. Однако, как и «книжку», его нельзя придвинуть вплотную к стене. -
Диван с механизмом Пантограф
Пантограф – этот вид дивана раскладывается по принципу, схожему с «еврокнижкой», за исключением того, что для выдвижения сиденья его нужно приподнимать вверх, а затем двигать вперед. После чего на освободившееся место также опрокидывается спинка. Благодаря такой конструкции он сохраняет свои преимущества в площади поверхности, однако в сложенном виде на нем по-прежнему не очень удобно. Такой механизм хотя и обеспечивает легкость трансформации, а также абсолютно ровную поверхность места для отдыха, значительно повышает стоимость модели. Зато здесь имеется ящик для спальных принадлежностей. -
Диван с механизмом Пума
Пума – по аналогу с предыдущим типом механизма этот раскладывается по принципу приподнятия-выдвижения сиденья дивана. Одновременно с этим на освободившееся пространство снизу поднимается мягкая платформа, создавая единое место для сна и отдыха. Такие модели выгодны легким раскладыванием, но, как правило, не имеют ящика для спальных принадлежностей. К тому же, спинки таких моделей представляют собой отдельные подушки, которые в режиме места для сна вечно некуда деть. Чаще всего этот тип механизма стоит на угловых диванах.
Одновременно с этим на освободившееся пространство снизу поднимается мягкая платформа, создавая единое место для сна и отдыха. Такие модели выгодны легким раскладыванием, но, как правило, не имеют ящика для спальных принадлежностей. К тому же, спинки таких моделей представляют собой отдельные подушки, которые в режиме места для сна вечно некуда деть. Чаще всего этот тип механизма стоит на угловых диванах. -
Диван с механизмом Аккордеон
Аккордеон – пожалуй, самая универсальная модель. Раскладывается по принципу «гармошки» выдвижением сиденья, которое тащит за собой и раскладывает сложенную пополам спинку. В результате образуется просторное спальное место. Тогда как в сложенном состоянии он весьма компактный. Но подобное преимущество выливается и в существенный недостаток: места для разложенного дивана нужно очень много, что станет фатальным для комнаты небольшой площади. К тому же, подобный механизм требует приложения немалых усилий. -
Диван с механизмом Французская раскладушка
Французская раскладушка – этот вариант вряд ли подойдет для повседневного использования, однако как дополнительное гостевое место – вполне пригоден. Спинку у этой модели обычно заменяют подушки, которые перед трансформацией убирают. После этого сиденье последовательно раскладывается на три секции (по принципу раскладушки), образуя вместительное место для отдыха. Этот вид механизма не отличается надежностью. К тому же, между разложенными секциями остаются неудобные щели, мешающие комфортному отдыху. Вдобавок, нет ящика для белья. -
Диван с механизмом Американская раскладушка
Американская раскладушка – в отличие от «французского» аналога этот тип механизма более надежен и выдержит частые трансформации. Раскладывается он несколько иначе.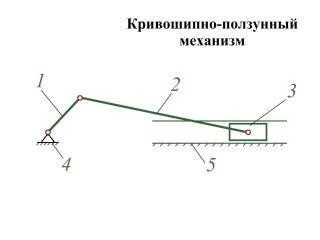 Сначала из корпуса дивана выдвигается блок со сложенной составной частью. Сиденье выдвижного блока поднимается, а составная секция раскладывается вперед по типу раскладушки и устанавливается на ножки. Получается просторное спальное место. Однако между секциями остаются не очень удобные швы. К тому же, отсутствует отсек для белья.
Сначала из корпуса дивана выдвигается блок со сложенной составной частью. Сиденье выдвижного блока поднимается, а составная секция раскладывается вперед по типу раскладушки и устанавливается на ножки. Получается просторное спальное место. Однако между секциями остаются не очень удобные швы. К тому же, отсутствует отсек для белья. -
Диван с механизмом Спартак
Спартак – стильный диван, механизм раскладывания которого схож с «американской раскладушкой». Перед началом трансформации с сиденья снимают подушки. После чего из корпуса поднимают диванный блок, который, в свою очередь, раскладывается еще на две секции, устанавливающиеся на ножки. Все секции изготовлены из прочного металла, что значительно уменьшает вес конструкции в сравнении со стандартными элементами других видов диванов. Однако подобная конструкция лишает диван возможности хранить внизу постельное белье. -
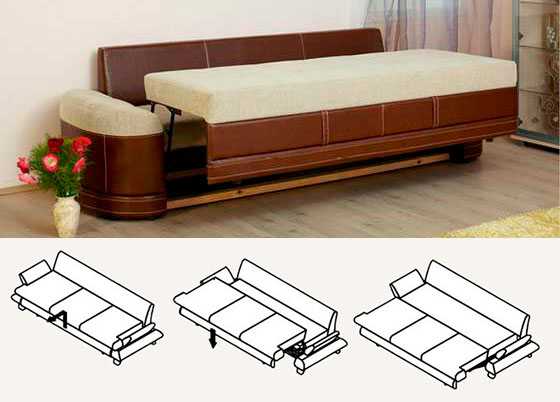
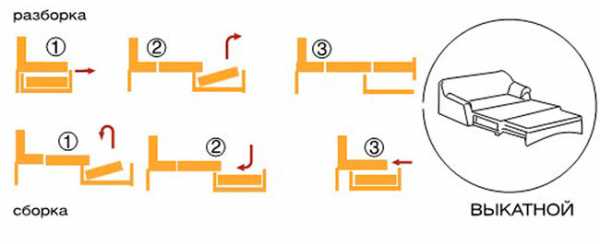
Диван с механизмом Выкатной
Выкатной – еще один вид механизма, отличающийся как простотой, так и надежностью.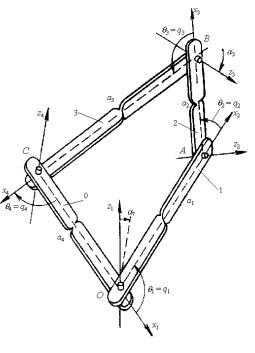 В основе трансформации его лежит выдвижная передняя часть, на которой находится сложенная вдвое подушка. Эта подушка разворачивается и укладывается на освободившееся пространство. Образуется просторное, а главное — лишенное швов спальное место. Однако высота от пола такого дивана кому-то может показаться слишком малой.
В основе трансформации его лежит выдвижная передняя часть, на которой находится сложенная вдвое подушка. Эта подушка разворачивается и укладывается на освободившееся пространство. Образуется просторное, а главное — лишенное швов спальное место. Однако высота от пола такого дивана кому-то может показаться слишком малой. -
Диван с механизмом Напольный
Напольный – пожалуй, самый простой и экономичный вид дивана.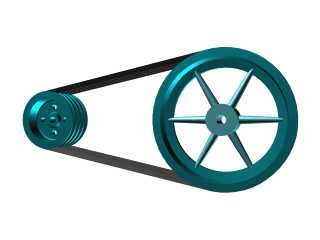 Состоящая из двух частей раскладная часть в сложенном состоянии полностью умещается в корпус дивана, образуя его сиденье. Тогда как, раскладываясь, она размещается на полу без ножек или подпорок. Конструкция проста и поэтому надежна. Но, разумеется, ни о каком ящике для белья не может быть и речи.
Состоящая из двух частей раскладная часть в сложенном состоянии полностью умещается в корпус дивана, образуя его сиденье. Тогда как, раскладываясь, она размещается на полу без ножек или подпорок. Конструкция проста и поэтому надежна. Но, разумеется, ни о каком ящике для белья не может быть и речи. -
Диван с механизмом Конрад
Конрад – модель с трехсекционным механизмом. В собранном виде это красивый и стильный диван, а в разобранном – просторное место для сна.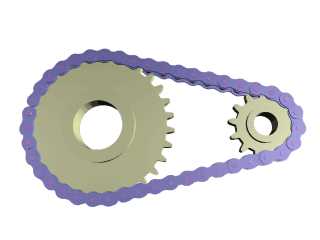 Трансформируется он при помощи вытягивания сиденья, из которого, в свою очередь, выдвигается третья секция с подъемной частью. В итоге место для отдыха получается не только большим по площади, но и высоким. Механизм этой модели хотя и отличается надежностью, но достаточно тяжелый. Зато имеются ящики для хранения спальных принадлежностей.
Трансформируется он при помощи вытягивания сиденья, из которого, в свою очередь, выдвигается третья секция с подъемной частью. В итоге место для отдыха получается не только большим по площади, но и высоким. Механизм этой модели хотя и отличается надежностью, но достаточно тяжелый. Зато имеются ящики для хранения спальных принадлежностей. -
Диван с механизмом Дельфин
Дельфин – подобный тип трансформации чаще всего встречается у угловых диванов. Принцип его действия – выдвижение нижней секции длинной стороны с последующим подъемом подушки вверх при помощи мягкой ручки.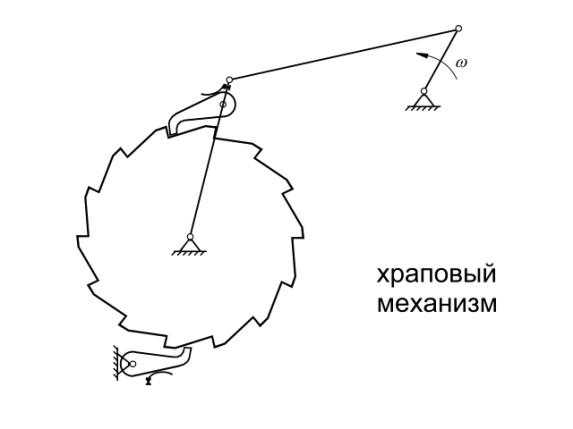 Как правило, угловой диван такой конструкции имеет состоящую из отдельных подушек спинку. Подушки приходится убирать при раскладывании спального места. Механизм отличается устойчивостью к нагрузкам, однако довольно быстро изнашивается. К тому же, постеленный на полу ковер будет сильно затруднять выдвижение секции.
Как правило, угловой диван такой конструкции имеет состоящую из отдельных подушек спинку. Подушки приходится убирать при раскладывании спального места. Механизм отличается устойчивостью к нагрузкам, однако довольно быстро изнашивается. К тому же, постеленный на полу ковер будет сильно затруднять выдвижение секции. -
Диван с механизмом Кенгуру
Кенгуру – принцип работы механизма схож с «дельфином» с той лишь разницей, что в разложенном состоянии он значительно выше над полом.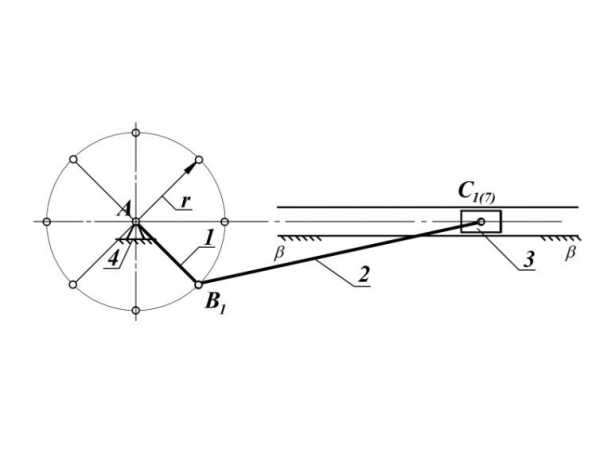 Однако от этого конструкция теряет в надежности. И, как и модели с типом трансформации «дельфин», этот диван не отличается долгим сроком эксплуатации.
Однако от этого конструкция теряет в надежности. И, как и модели с типом трансформации «дельфин», этот диван не отличается долгим сроком эксплуатации. -
Диван с механизмом Реклайнер
Реклайнер – самая современная и прогрессивная разновидность механизма трансформации. Она позволяет регулировать положение отдельных частей дивана – наклона спинки, подлокотников, подставки для ног и т.д., создавая таким образом идеальное место для релаксации. На отдельных более дорогих моделях таких диванов устанавливаются вибромассажеры, регулируемые при помощи пульта управления. К тому же, внешний вид таких диванов является самым солидным и презентабельным. Однако есть существенные недостатки и у них. Полноценное спальное место на таком диване вряд ли получится. Да и стоимость даже самых простых моделей кусается.
На отдельных более дорогих моделях таких диванов устанавливаются вибромассажеры, регулируемые при помощи пульта управления. К тому же, внешний вид таких диванов является самым солидным и презентабельным. Однако есть существенные недостатки и у них. Полноценное спальное место на таком диване вряд ли получится. Да и стоимость даже самых простых моделей кусается.
Выбор, как мы видим, огромный. Так диван с каким механизмом трансформации предпочесть? В первую очередь, следует учитывать размер семьи. На одного человека достаточно будет дивана с механизмом «эльф» или какой-нибудь «книжки». Одиночкам, не стесненным в средствах и желающим стильно и со вкусом обставить, к примеру, студию, можно потратиться на диван-реклайнер. Если семья очень большая, то лучшим вариантом станут диваны вместительные в сложенном состоянии – например, угловые. Для небольшой семьи по вместительности подойдут диваны любых других видов.
По экономии места также стоит ориентироваться на модели, которые как в сложенном, так и в разложенном виде не занимают много пространства. Также предпочтение можно отдать модели с подъемным механизмом ящика для хранения спальных принадлежностей – пространство для одеял, подушек и пледов не будет лишним. Такой вариант особенно актуален для диванов со спинками-подушками. Останавливаться на вариантах с ненадежными механизмами не стоит. Они не оправдают ваших ожиданий. Привыкшим спать на идеально ровной поверхности кровати также следует избегать диванов-раскладушек и прочих разновидностей, у которых со временем между подушками образуются неровности.
В остальном же результаты выбора будут акцентироваться на предпочтениях человека. Ведь как обычно бывает: заходишь в магазин или на сайт, видишь диван и понимаешь – он то, что тебе надо. А все эти механизмы, преимущества и недостатки отходят на второй план.
32 790 ₽
35 290 ₽
27 490 ₽
48 309 ₽
40 990 ₽
33 900 ₽
306 900 ₽
51 440 ₽
203 460 ₽
106 040 ₽
14 990 ₽
21 990 ₽
www.grandfs.ru