Механизм • Карданный вал в деталях • Kardan-valtehcno.ru —
Карданные валы нашли широкое применение в автомобильной индустрии, промышленности, железнодорожном и морском транспорте.
Механизм, состоящий из одного или нескольких карданных валов и карданных шарниров, предназначенный для передачи силы крутящего момента от силового агрегата к исполнительному механизму пространственно удаленных друг от друга, оси которых не совпадают и могут изменять свое положение, называется карданной передачей.
Конструкция карданного вала в независимости от его применения, остается неизменной, в основе которой лежит карданный шарнир.
Карданный вал, может состоять из:
Крестовина карданного валаНабор деталей крестовины карданного вала, включает в себя, саму крестовину (крестообразный шарнир), тавотницу для смазки, четыре опорных подшипника. Крестовина кардана, обеспечивает соосность элементов. Установленные подшипники крестовины, фиксируются стопорными кольцами, тем самым не дают им смещаться в проушинах вилок.
Крестовины карданных валов, изготавливаются путем горячей штамповки. В качестве исходного материала для заготовки крестовины используют легированную сталь.
После механической обработки тела крестовины, рабочие поверхности (шип крестовины) под игольчатый подшипник, проверяются геометрические параметры и шероховатость поверхностей.
Размеры крестовины зависят от размеров и предназначения машины, мощности силового агрегата, крутящего момента.
Отдельно можно выделить, крестовины промышленных валов. Требования к изготовлению промышленных крестовин, в разы выше, чем у крестовин, применяемых в автомобилестроении.
Крестовина промышленного кардана, имеет более габаритные размеры, так ка она призвана передавать более высокие нагрузки, до 1300 кНм. Наличие смазочных ниппелей, могут присутствовать на торцах всех четырех подшипников крестовины и на самом теле креста.
Схожие по размеру крестовины промышленного кардана, могут отличатся по функциональности и температурных показателях, в которых она применяется.
Фланец карданного вала (фланец-вилка).
Фланцы карданных валов, изготавливаются методом горячей штамповки. После заготовки фланцев, обрабатываются до нужных форм и размеров на металлорежущем оборудовании. Посадочные отверстия под крестовину и центровочная посадка фланца, протачивается за одну установку. Канавки под стопорные кольца, протачиваются с использованием высокоточного метода координатных измерений.
Поскольку карданный вал должен быть точно установлен, между ведущими и ведомыми элементами машины, фланец-вилка выполняет функцию связывающего звена.
Виды стандартных фланцев для карданных валов:
- Фланец с посадкой DIN.
 Фланцевое соединение с внутренней проточкой для соединительных фланцев, изготовленных в соответствии со стандартом ISO 7646.
Фланцевое соединение с внутренней проточкой для соединительных фланцев, изготовленных в соответствии со стандартом ISO 7646. - Фланец с посадкой SAE. Фланцевое соединение с наружной проточкой для соединительных фланцев, изготовленных в соответствии со стандартом ISO 7647.
- Фланец с посадкой KV / XS. Фланцевое исполнение с разнонаправленными зубьями (крестообразные шлицы Х) в соответствии со стандартом ISO 12667для соединительных фланцев, изготовленных согласно стандарту ISO 8667. Часто данный тип фланца называют, «евро фланец».
Карданный вал для промышленного оборудования, имеет более высокие нагрузки и может иметь отдельное исполнение центровочной, фиксирующей посадки фланца от стандартных исполнений, так же отличается способ фиксации крестовины. Отличительными чертами промышленных карданов, является их габаритные размеры деталей, несущие способность передавать, высокую силу крутящего момента до 1300 кНм.
В большинстве случаев фланцы карданных валов промышленного оборудования, имеют исполнение:
- Фланец с торцевой шпонкой
- Четырехгранный фланец
- Фланец с торцевыми шлицами
Безусловно, карданные валы могут быть оснащены любыми возможными формами соединительных фланцев.
Вилки карданного шарнира.
Заготовки вилок, протачиваются на металлорежущих станках до получения нужной формы, требуемой точности размеров и шероховатости поверхности деталей.
Вилки шлицевых валов, приварные вилки под трубу, а так же фланец-вилка карданного вала, имеют проточенные отверстия, используемые в качестве посадочных мест опорных подшипников крестовины. Кольцевые пазы (канавки) под стопорные кольца, протачиваются на высокоточных координатно-расточных станках.
Вилка кардана, является неотъемлемым элементом карданного шарнира
Подвижное шлицевое соединение ( шлицевая пара ).
Шлицевое соединение на карданном валу, служит для компенсации изменяющейся длины, между агрегатами.
Подвижная шлицевая пара, включает в себя:
- вилку с шлицевым валом
- шлицевую втулку
- грязезащитный пыльник
Детали шлицевой пары, изготавливаются методом горячей штамповки с последующей обработкой резанием. Профиль шлицевой втулки, изготавливается путем протягивания поверхности на протяжном станке. Шлицевой профиль вала прокатывается роликами, без снятия стружки. Так же, шлицевой профиль вала, изготавливают путем резания на зубообрабатывающих станках. Эвольвентный профиль обеспечивает минимизированную удельную нагрузку.
В зависимости от исполнения, шлицевая втулка либо шлицевой вал, могут быть покрыты полимерным покрытием «рильсан». Данное покрытие обеспечивает защиту профиля, позволяет свести к минимуму зазор в шлицах и уменьшить силы трения.
Подвижное шлицевое соединение, может иметь систему смазки (наличие тавотницы в шлицевой втулке или металлическом пыльнике), так же существуют шлицевые пары не требующие обслуживания.
Грязезащитный пыльник шлицевого соединения. Большинство карданных валов, особенно предназначенных для тяжелых условий эксплуатации (спецтехника, агротехника, лесозаготовительные машины), имеют в конструкции защитный элемент подвижной шлицевой пары. Металлический пыльник карданного вала, закрывает всю рабочую поверхность шлицевой и имеет на окончании, резиновое уплотнительное кольцо. Материал и форма уплотнительного кольца, подбираются в зависимости от используемой системы смазки и области применения. Пыльник шлицевого соединения, предназначен для защиты подвижного элемента от проникающей снаружи грязи и выкидывания смазки из шлицевой пары. На карданных валах, могут применятся, трубообразные металлические пыльники или же резиновые гофры.
Неподвижное шлицевое соединение под подвесной подшипник.
Шлицевой комплект под подвесной подшипник широко применяется на карданных валах, состоящих из нескольких частей. Конструкции длиннобазных карданных валов, могут включать в себя применение одного или нескольких подвесных подшипников.
Неподвижное шлицевое соединение состоит из:
- шлицевого вала (пальца) с посадкой под подвесной подшипник
- фланца, стандартов DIN, SAE, KV
- подвесного подшипника
- контргайки
Промежуточные опоры карданного вала (подвесной подшипник).
Поддерживающие опоры, используются в качестве узла крепления карданной передачи. Подвесной подшипник, является неотъемлемой частью карданных валов, в длиннобазных конструкциях. Посадочные места деталей карданного вала, должны точно соответствовать размерам подшипников качения и другим составляющим подшипниковой опоры.
Виды подвесных подшипников подразделяются:
- стандартная промежуточная опора, применяется на карданных валах тяжелой техники и спец. техники
- эластичная промежуточная опора, применяется на более легких автомобилях и коммерческом транспорте
- промежуточная опора для тяжелых нагрузок, применяется исключительно для промышленных карданов
В машиностроении и производстве промышленного оборудования, стандартные подшипниковые опоры кардана, за частую выполнены в виде фиксированных или плавающих подшипников.
В автомобилестроении применяются в основном подшипники с эластичной опорой. В данном случае подшипник качения, запрессовывается в металлическую обойму резинового корпуса.
Резиновый элемент подвесного подшипника выполняет следующие функции
- подавление колебаний и шумов (для лучшей регулировки вибро и шумо изоляции, возможно применение резины различной жесткости)
- восприятие осевых перемещений
- восприятие угловых перемещений и наклонных положений
Труба карданного вала, представляет собой бесшовную, цельнотянутую, высокоточную калиброванную деталь.
Труба кардана, соединяет между собой разные узлы карданного вала в зависимости от конструкции (шлицевую втулку, вилку, неподвижное шлицевое соединение, подвижную шлицевую пару). Перед сварочными работами, торцы труб обрабатываются металлорежущим инструментом, протачивается фаска под сварной шов. Сварка труб с деталями карданного вала, осуществляется на станках круговой сварки.
Кардан Валтехно, надежный поставщик карданных валов и комплектующих к ним запчастей с 2014 г.
В нашем ассортименте, присутствуют детали карданных валов от мировых производителей DANA SPICER, GWB, KLEEN, INA, SKF, KN.
Ежемесячные поставки запчастей для карданов и карданных валов в сборе из Европы.
У нас всегда можно, купить крестовину (крестовины) по выгодной цене, купить карданный вал (кардан), фланец карданного вала, подвесной подшипник, шлицевое соединение.
Региональные поставки запчастей. Отправка карданов и комплектующих запчастей, осуществляется транспортными компаниями Деловые Линии, ПЭК, Байкал Сервис, РАТЭК.
Карданная передача и карданный вал – в чём разница? — Информация о запчастях
«Карданная передача» многозначна. Так, часто в определенных каталожных
номерах трансмиссии путают понятие механизма «карданная передача» и непосредственно автодетали «карданная передача».
В общем смысле «карданная передача» — это один из механизмов (способов) передачи крутящего момента (трансмиссии), как правило, от силового агрегата (двигатель) на рабочий орган (движитель: колесо, шестерня, шнек, винт, муфта, …).
Карданная передача встречается также во всех случаях, где необходимо передать крутящий
момент под углом (например, рулевые карданные валы от рулевого колеса водителя до
рулевого или углового редуктора).
Иногда этот способ называют еще «шарнир Гука», «ШНРУС (шарнир НЕравных угловых скоростей)» и даже «крестовина» (примечание: помимо «карданной передачи» существуют также другие механизмы трансмиссии, например, «шарнир Рцеппа — ШРУС (шарнир равных угловых скоростей)», «трипод», «зубчатая муфта», «механизм Олдема (кулачково-дисковая муфта)» и другие).
В наиболее распространенном виде карданная передача как автодеталь (в народе «кардан«) представляет собой карданные шарниры с крестовинами, объединенные одним или несколькими валами (трубными либо беструбными, как неподвижными, так и с возможностью изменения длины).
В узком смысле «карданный вал» представляет собой
два таких шарнира, соединенные между собой трубой и/или механизмом изменения длины
(«скользящая шлицевая»), часто также обозначается как «2-опорный».
В свою очередь «карданная передача» (автодеталь) представляет собой совокупность двух и более карданных валов, дополнительно оборудованных подвесным подшипником на каждый дополнительный неподвижный вал, часто также обозначается как «3-опорная, 4-опорная, …». Разбиение «карданной передачи» обусловлено ограничением максимальной длины трубы одного карданного вала при необходимости передачи трансмиссии на большие расстояния.
Принцип работы карданного вала
Принцип работы карданного вала
Карданный вал, построен на физических принципах работы так называемого универсального шарнира, который был изобретен много веков назад. Универсальные шарниры обычно используются для передачи механической энергии между двумя валами, когда их оси находятся под углом друг к другу.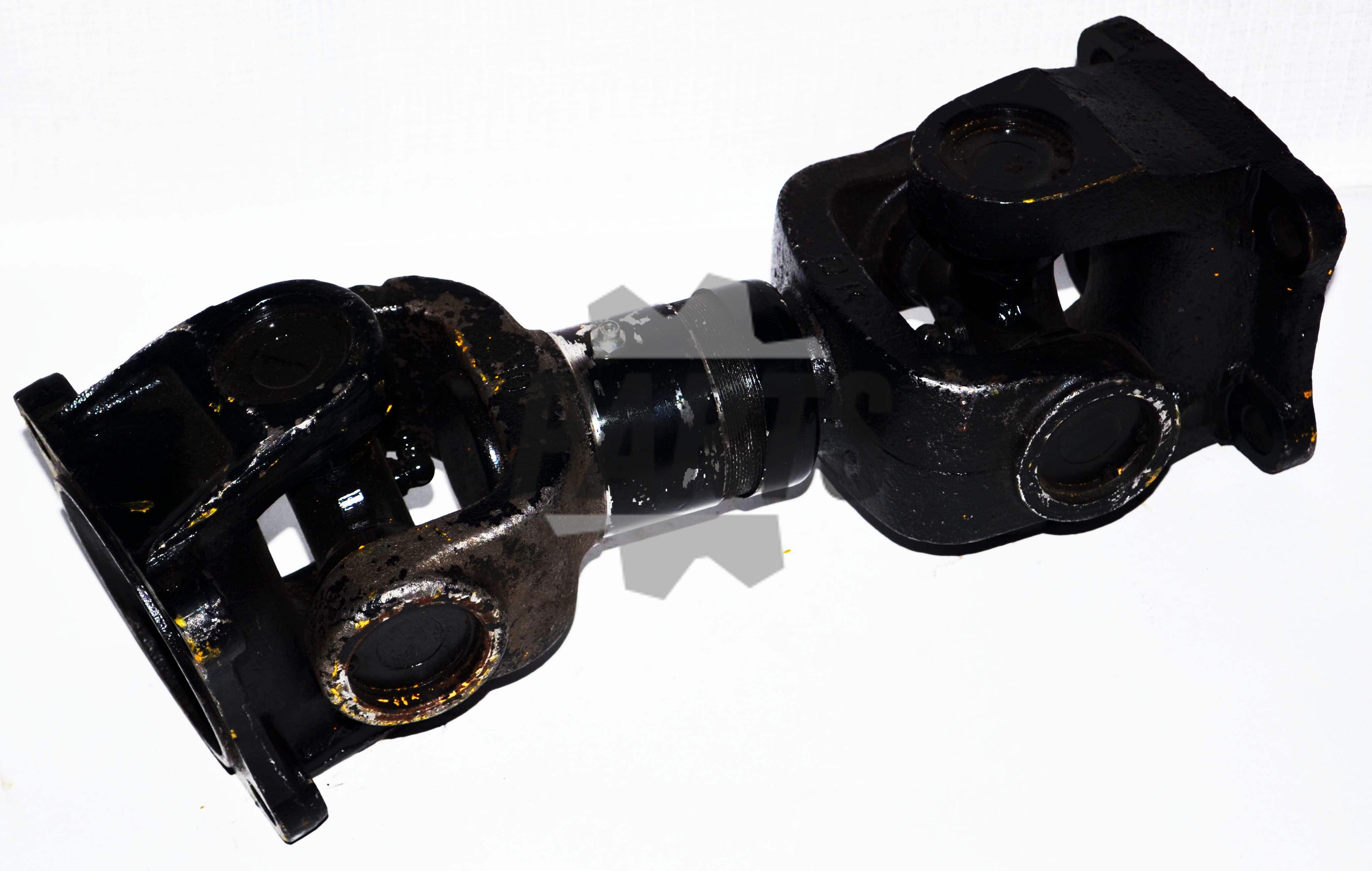 Несмотря на то, что механизм универсальных шарниров кажется простым, физическая основа этого механизма довольно сложная и интересная.
Несмотря на то, что механизм универсальных шарниров кажется простым, физическая основа этого механизма довольно сложная и интересная.
Что бы понять как работает карданный вал необходимо разделить его на три составные части. Первая часть карданного вала это так называемая ведущая часть, после которой идет промежуточная часть карданного вала и наконец третью часть карданного вала можно назвать ведомой. Части кардана соединены между собой крестовиной, образно говоря давайте назовем ее просто четырьмя маркерами, по которым мы и будем оценивать угловые скорости вращения. При вращении карданного вала скорость вращения ведущей части постоянная и ведущая и ведомая части карданного вала расположены параллельно относительно друг друга, в то время как промежуточная часть расположена к ним под углом 30 (тридцать) градусов. Скорость вращения с ведущей части карданного вала на промежуточную передается не постоянная. Скорость вращения промежуточной части постоянно меняется с запаздывания на опережение по отношению к вращению ведущей части карданного вала. Так же с промежуточной части карданного вала на ведомую часть, скорость вращения передается не постоянная, поочередно сменяясь с запаздывания на опережение. Но сопоставив скорость вращения маркеров ведущей и ведомой части карданного вала мы увидим, что их скорости вращения будут оставаться постоянными, хотя скорость вращения промежуточной части будет переменной, как мы указывали выше.
Так же с промежуточной части карданного вала на ведомую часть, скорость вращения передается не постоянная, поочередно сменяясь с запаздывания на опережение. Но сопоставив скорость вращения маркеров ведущей и ведомой части карданного вала мы увидим, что их скорости вращения будут оставаться постоянными, хотя скорость вращения промежуточной части будет переменной, как мы указывали выше.
Если изменить угол вращения ведомой части относительно ведущей на 15 (пятнадцать) градусов и сопоставить маркера то мы увидим, что скорость вращения ведущей части карданного вала постоянная, а скорость вращения ведомой части так же как и промежуточной станет переменной, относительно скорости вращения ведущей части.
Из выше указанного можно сделать вывод, что неправильная работа карданного вала приводит к вибрации и неравномерному износу механизмов.
Доверяйте ремонт и балансировку карданных валов только специалистам!
Возврат к списку
Виды карданных валов:с крестовинами, со шрусами, с подвесными подшипниками и без них, компания КарданБаланс отремонтирует и изготовит любой из них в Москве.
 | КарданБаланс
| КарданБалансТипы карданных валов различаются не только от производителя к производителю, но и зачастую от одной модели автомобиля к другой.
Исходя из наличия подвесных подшипников, выделяют следующие виды карданных валов:
•карданные валы без подвесного подшипника (двухопорные), •трехопорные карданные валы (с одним подвесным подшипником), •четырехопорные карданные валы (с двумя подшипниками). На большинстве автомобилей применяются трехопорные карданные валы. Четырехопорные обычно ставят на некоторые внедорожники, например Lexus, Chrysler.
По типу крепления карданные валы подразделяются на:
Карданы с крестовиной. Крестовина представляет собой крестообразный шарнир, который отвечает за совпадение осей вращения крутящихся элементов карданного вала.
В настоящее время большинство заднеприводных автомобилей оснащаются карданными валами с крестовиной, однако, среди автолюбителей (в особенности тех, кому часто приходится ездить по бездорожью) практикуется их смена на карданы с шарнирами равных угловых скоростей с целью уменьшения вибрации. Особенно это актуально в автомобилях отечественного производства.
Выделяют также карданы рулевого механизма, которые оснащаются несколькими крестовинами.
Карданные валы со ШРУС. Кардан с шарниром равных угловых скоростей, или ШРУС, считается наиболее удачным вариантом. Поскольку ШРУС способен перемещаться при передаче крутящего момента в любой плоскости, он исключает появление вибрации трансмиссии и предотвращает быстрый износ узлов и агрегатов. Кроме того, в карданах со ШРУС отсутствуют подвижные шлицевые соединения, которые нуждаются в регулярном обслуживании.
По материалу изготовления карданные валы бывают алюминиевые, чугунные и стальные. Последние встречаются в современных автомобилях наиболее часто.
На некоторых автомобилях применяются сдвоенные карданы – то есть карданные соединения, состоящие из двух или более частей. Такая конструкция позволяет избежать биения и вибрации вала на высоких скоростях. Обычные длинные межосевые карданные валы на большой скорости могут изгибаться и давать дисбаланс, на составных механизмах этой проблемы нет.
Особенно это актуально в автомобилях отечественного производства.
Выделяют также карданы рулевого механизма, которые оснащаются несколькими крестовинами.
Карданные валы со ШРУС. Кардан с шарниром равных угловых скоростей, или ШРУС, считается наиболее удачным вариантом. Поскольку ШРУС способен перемещаться при передаче крутящего момента в любой плоскости, он исключает появление вибрации трансмиссии и предотвращает быстрый износ узлов и агрегатов. Кроме того, в карданах со ШРУС отсутствуют подвижные шлицевые соединения, которые нуждаются в регулярном обслуживании.
По материалу изготовления карданные валы бывают алюминиевые, чугунные и стальные. Последние встречаются в современных автомобилях наиболее часто.
На некоторых автомобилях применяются сдвоенные карданы – то есть карданные соединения, состоящие из двух или более частей. Такая конструкция позволяет избежать биения и вибрации вала на высоких скоростях. Обычные длинные межосевые карданные валы на большой скорости могут изгибаться и давать дисбаланс, на составных механизмах этой проблемы нет. Составные валы чаще всего можно встретить, опять же, на внедорожниках и других автомобилях, рассчитанных на высокие скорости.
Отдельно следует выделить карданные валы с эвольвентными шлицами. Карданы со стандартным подвижным шлицевым соединением быстро изнашиваются и способствуют износу других агрегатов трансмиссии. Эвольвентные шлицы специальной формы исключают появление вибрации и продлевают срок службы кардана.
Составные валы чаще всего можно встретить, опять же, на внедорожниках и других автомобилях, рассчитанных на высокие скорости.
Отдельно следует выделить карданные валы с эвольвентными шлицами. Карданы со стандартным подвижным шлицевым соединением быстро изнашиваются и способствуют износу других агрегатов трансмиссии. Эвольвентные шлицы специальной формы исключают появление вибрации и продлевают срок службы кардана.
Карданный вал автомобиля — Blumaq Russia 2021
Проблемы, связанные с эксплуатацией карданного вала. Карданный вал остается наиболее простым передаточным механизмом между двигателем автомобиля и его ведущим мостом.
Активная эксплуатация автомобиля приводит к появлению проблем карданного вала. Карданная передача является механизмом, с помощью которого крутящий момент передается между валами. Карданная передача используется для взаимного углового перемещения валов. Передача применяется для сохранения взаимного расположения осей вращающихся элементов. В конструкциях автомобилей крестовина карданного вала обеспечивает передачу крутящего момента от раздаточной коробки (коробки передач) к ведущему мосту. В зависимости от количества ведущих мостов автомобиля, изменяется количество установленных карданных валов. Дополнительные валы носят название промежуточных карданных валов.
В конструкциях автомобилей крестовина карданного вала обеспечивает передачу крутящего момента от раздаточной коробки (коробки передач) к ведущему мосту. В зависимости от количества ведущих мостов автомобиля, изменяется количество установленных карданных валов. Дополнительные валы носят название промежуточных карданных валов.
В состав конструкции карданного вала входит:
- карданный вал, который представляет собой стальную трубу, выполненную из высоколегированной стали;
- подвесной подшипник карданного вала;
- опора карданного кала;
- муфта карданного вала;
- крестовина карданного вала.
Труба карданного вала в сборе состоит из скользящей или стационарной вилки, фланца-вилки и крестовины, которая устанавливается в ушках вилок с помощью игольчатых подшипников.
С появлением автомобилей с передним приводом, карданный вал начали применять только на грузовой тяжелой технике, для которой важно движение заднего ведущего моста.
Проблемы карданного вала
Проблемы карданного вала автомобиля начинают проявляться постепенно – появляются посторонние стуки, скрипы и биения. Затем образуются люфты в соединениях пальцев крестовин, которые влекут за собой появление дополнительных посторонних звуков. Если смазка карданного подшипника и пальцев карданной крестовины не дала результата – это сигнал водителю, что пора начать ремонт карданного вала.
Затем образуются люфты в соединениях пальцев крестовин, которые влекут за собой появление дополнительных посторонних звуков. Если смазка карданного подшипника и пальцев карданной крестовины не дала результата – это сигнал водителю, что пора начать ремонт карданного вала.
Ремонт карданных валов состоит из следующих элементов:
- замены крестовины карданного вала;
- замены подвесного подшипника;
- замена опоры карданного вала;
- замена игольчатых подшипников.
Замена всего карданного вала производится крайне редко, так как она выполняется из высокопрочной стали, которая рассчитывается на весь срок эксплуатации автомобиля. Кардан может быть поврежден только во время аварии автомобиля.
Произвести ремонт кардана автомобиля можно с помощью оригинальных и неоригинальных запасных частей, продажу которых предлагает компания Blumaq. Компания специализируется на продажах недорогих запчастей для автомобилей отечественного и импортного производства.
Обозначение | Применение | Аналог ОАО «Аксайкардандеталь» ОАО»Белкард» |
вал К10. 016.043.056.115.115 016.043.056.115.115 | Платформа подборщика «Дон-680» после 2001г. | 10.016.2000-15 |
| вал К10.016.043.056.115.265 | Разбрасыватель удобрений РУН-1 | 10.016.2000-12.04 |
| вал К10.016.050.070.115.115 | Сеялка СПБ, Платформа подборщика «Дон-680» до 2001г. | 10.016.2000-02, 10.016.2000-08 |
| вал К10.016.053.076.115.113 | Опрыскиватели прицепные ОС-1000-12., ОС-2000А-12 | 10.016.2000-04.05, 10.016.3000-110 |
| вал К10.016.053.076.115.115 | Привод сеялки СТВ-8 (пр-во Гомсельмаш), Поливная бочка ОПМ-3,5 | 10.016.2000-04, 10.016.3000-50 |
| вал К10.016.053.076.115.264 | Кормораздатчик КМП | 10.016.2000-01.03 |
| вал К10.016.053.076.115.265 | Косилка роторная КРН пр-во «Сальсксельмаш» | 10.016.2000-08.04 |
| вал К10.016.057.082.115.115 | Грабли ворошилки ГВР-4. 2, УД-1, ОЛ-1 (пр-во Бобруйскагромаш) 2, УД-1, ОЛ-1 (пр-во Бобруйскагромаш) | 10.016.2000-05, 10.016.3000-90 |
| вал К10.016.058.087.115.113 | Машина для внесения удобрений МВУ-08 пр-во ОАО «Корммаш» | 10.016.2000-14.05 |
| вал К10.016.058.087.115.265 | Разбрасыватель удобрений РУС-0,7 | 10.016.2000-16.04, 10.016.3000-100 |
| вал К10.016.063.093.115.113 | Опрыскиватели импортного производства | 10.016.2000-08.05 |
| вал К10.016.063.096.115.265 | Сеялка (пр-во Лидасельмаш), Опрыскиватели, Оборачиватель валков РОС-Ф-1, Привод сеялки СПУ-6, СПУ-4, СПУ-3 (пр-во Лидасельмаш) | 10.016.2000-21.04М, 10.016.2000-03.04, 10.016.2000-09.04, 10.016.3000-140 |
| вал К10.016.063.098.115.115 | Машина для внесения удобрений МВУ-2, Косилка КСФ-2,1, Сеялка СЗБ-9, Опрыскиватель ОПВ-2000 (пр-во Львовсельмаш), Грабли ГВЦ | Н081.10.016.2000-01, 10.016.2000-07, 10. 016.3000-80 016.3000-80 |
| вал К10.016.065.100.115.113 | Опрыскиватель РАУ | 10.016.2000-13.05, 10.016.3000-130 |
| вал К10.016.065.100.115.264 | Жатка ЖВП-4,9 привод от ВОМ | 10.016.2000-13.03 |
| вал К10.016.080.120.115.113 | Машина для внесения удобрений МВУ, Сеялка СТВ-12 | 10.016.2000-07.05 |
| вал К10.016.080.130.115.265 | Кормораздатчик КТУ-10, Коммунальная машина МКШ, МКС | 10.016.2000-20.04 |
| вал К10.016.085.140.115.113 | Опрыскиватели | 10.016.2000-06.05 |
| вал К10.016.090.100.264.264 | Жатка ЖКС-4,1 комбайн СК-5 «Нива» | 10.016.2000-08.33 |
| вал К10.016.090.125.115.115 | Универсальная жатка 5м нового образца Комбайны ОАО «РСМ» | 10.016.2000-34 |
| вал К10.016.095.150.115.115 | Коммунальная щетка МШУ-1,8 | 10.016.2000-13 |
вал К10. 016.095.150.115.265 016.095.150.115.265 | Кормораздатчик КПП-6 | 10.016.2000-10.04 |
| вал К10.016.118.202.113.265 | Кормораздатчик КТУ-10 для импортных тракторов | 10.016.2000-01.54 |
| вал К10.016.118.202.115.265 | Кормораздатчик КТУ-10 для МТЗ | 10.016.2000-01.04 |
| вал К10.016.135.170.115.115 | Универсальная жатка 6м нового образца Комбайны ОАО «РСМ» | 10.016.2000-35 |
| вал К10.016.138.150.264.264 | Жатка ЖКС-5 комбайны «Енисей-1200» и СК-5 «Нива» | 10.016.2000-05.33 |
| вал К10.016.144.169.206.206 | Комбайн «Дон-1500» жатка 6м старого образца | 10.016.2000-03.4343 |
| вал К10.016.160.195.115.115 | Жатка 8,6мм Комбайны ОАО «РСМ» | 10.016.2000-37 |
| вал К10.016.185.220.115.115 | Универсальная жатка 7м нового образца Комбайны ОАО «РСМ» | 10.016.2000-36 |
вал К10. 016.197.230.206.206 016.197.230.206.206 | Комбайн «Дон-1500» жатка 7м старого образца | 10.016.2000-04.4343 |
| вал С10.040.050.073.115.115 | Грабли ГВР-6.0, Подборщик ПФ-350, машина для внесения удобрений МВУ-5, (пр. Бобруйскагромаш), Грабли ворошилки ГВЦ-3, Сеноподборщик СП-3, Ботвоуборочная машина МБУ-2,8, Зернопогрузчик ПЗН-150 | 10.040.3000-06, 10.040.3000-х, 10.040.3000-07, 10.040.3000-60 |
| вал С10.040.050.078.113.113 | Грабли ГВР-6.0 | 10.040.3000-02.55 |
| вал С10.040.060.083.113.113 | Машины для внесения жидких удобрений МЖТ-10 | 10.040.3000-00.55 |
| вал С10.040.060.083.115.115 | Оборачиватель ленточный ОЛ-1, Машины для внесения удобрений МЖТ-6, МЖТ-10, МЖТ-11 Пресподборщик ПР-Ф-110, ПР-Ф-145, ПР-Ф-750 (пр-во Бобруйскагромаш), ППК-6, КИН-Ф-1500 «Полесье-1» (пр-во Гомсельмаш) | 10.040.3000 |
вал С10.040._Teh_perevod_Iin_yaz_022900_2006/Image129.jpg) 063.098.115.115 063.098.115.115 | Машина для внесения удобрений МВУ-5 (пр-во Лидасельмаш), Агрегат для внесения удобрений АВУ-0,7, Жатка ЖВП-7, | 10.040. 3000-11, 10.040.3000-30 |
| вал С10.040.063.098.115.265 | Картофелекопатель навесной КТН-2В, Картофелесожалка КСМ-4 (пр-во Лидасельмаш) | 10.040. 3000-11.03, 10.040.3000-40 |
| вал С10.040.065.090.115.113 | Опрыскиватели | 10.040. 3000-02.05 |
| вал С10.040.067.106.115.105 | Косилка роторная КРР под обгонную муфту | 10.040.3000-03.06 |
| вал С10.040.067.106.115.115 | Косилк ротационная КРН-2.1, Косилка КРС-20, Косилка КРР | 10.040. 3000-12, 10.040.3000-70 |
| вал С10.040.072.117.115.115 | Ботвоуборочный агрегат, Косилка КДН-2.1 (пр-во Бобруйскагромаш) | 10.040. 3000-13, 10.040.3000-80 |
| вал С10.040.075.110.115.113 | Опрыскиватель навесной ОZ-600-11 | 10.040.3000-07.05, 10.016.3000-120 |
| вал С10.040.080.118.266.266 | Свекпогрузчик СПО-4,2 | |
| вал С10.040.080.125.115.115 | Полесье-20 (пр-во Гомсельмаш) | 10.040.3000-19, 10.040.3000-50 |
| вал С10.040.085.133.115.115 | Кормораздатчик КРФ-10, Грабли-ворошилки ГВР-630, Машина для внесения удобрений МЖТ-16 (пр-во Бобруйскагромаш) | 10.040.3000-21, 10.040.3000-04, 10.040.3000-20 |
| вал С10.040.090.140.115.266 | Измельчитель КИР-1,5, Измельчитель ИКМ-1.3 | 10.040.2000-05.04 |
| вал С10.040.100.138.266.266 | Грабли ворошилки ГВР | 10.040.3000-05.33 |
| вал С10.040.110.190.115.115 | Пресс-подборщик Кыргызстан | |
| вал С10.040.120.160.115.115 | КИР-1,5 «Енисей», КПН-5 «Дон-680» | 10.040.2000-04 |
| вал С10.040.120.170.115.113 | Разбрасыватель удобрений ПТУ-14 (пр-во Латвия) | 10.040. 3000-11.05М |
Электровелосипеды с карданным механизмом: история появления карданных велосипедов
Видео: обзор Patrol Cardan
Сложно представить велосипед без цепи, тем более что цепная передача так популярна сегодня. Тем не менее, существуют и альтернативные способы приведения этот двухколесный транспорт в движение. Например, карданный механизм. Думаете, это новинка? А вот и нет: велосипеды с карданным и цепным механизмом появились в XIX веке.
В то время карданный механизм не был какой-то экзотикой. И даже существовали фирмы, которые серийно выпускали такие велосипеды. Однако в XXвеке цепной механизм почти вытеснил карданный, несмотря на все преимущества второго. А достоинства, главным образом, заключаются вот в чем.
- Нет цепи – нет необходимости постоянного ухода за ней (смазка, замена звеньев), нет испачканной маслом и зажеванной цепью одежды.
- Меньшее количество элементов механизма – выше надежность, ремонт потребуется реже.
- Долгий срок службы – все важные элементы конструкции закрыты, они защищены от попадания воды и грязи, поэтому служат дольше.
- Можно уверенно передвигаться по горкам – карданный механизм расположен выше звездочки цепной передачи, просвет получается больше, шанс задеть кочку ниже.
Однако у карданного механизма есть и недостатки. Среди них – невозможность самостоятельного ремонта, починить его получится только в сервисе. Да и вес у таких велосипедов несколько выше: как правило, он больше всего на 1-3 кг. Но это не критично.
Электровелосипеды с карданным механизмом
Мы предлагаем вам карданные электровелосипеды, которые уникальны в своем роде. Большинство из них отличается небольшим весом, несмотря на то, что, обычно вес таких велогибридов несколько больше. Например, электровелосипед Eltreco Кардан PREMIUM весит всего 19 кг! Он легкий, быстрый, маневренный.
Eltreco Patrol Cardan – новинкасезона2014! Модель представлена с колесами 26 и 28 дюймов. Электровелосипед складной, он не занимает много места при хранении, его можно сложить и убрать на зиму. Оснащен электродвигателем 350 Вт, аккумулятором 10,4 Ач, дисковыми механическими тормозами.
Eltreco Master Cardan – еще одна новинка этого года. Электровелосипед с колесами 20 дюймов, складной рамой и двигателем 350 Вт. Для города просто идеальный вариант!
Электровелосипеды с карданным механизмом давно зарекомендовали себя. Велогибриды надежны, просты в эксплуатации и уходе, по характеристикам ничуть не уступают моделям с цепной передачей, а в чем-то даже превосходят их. Они полностью оправдают ваши надежды!
Новые статьи:
Тренды и новинки электровелосипедов 2019 года
Электровелосипед – какой лучше купить?
2019: Характеристики электровелосипеда
Нужны ли права на электровелосипед?
Запчасти для электровелосипеда
How Ornithopters Fly — Карданный механизм
Карданный механизм
моделей орнитоптеров от EV1 до EV6
1. Карданный кривошипно-шатунный механизм в целом
Карданный кривошипно-шатунный механизм — это способ преобразования вращательного движения в прямое. линейное движение. Он был изобретен в 16 веке итальянским математиком. Джироламо Кардано.
Механизм карданной передачи с шатунной шейкой, в частности, состоит из внутреннего шестерня и планетарная передача с кривошипом.Внутренняя шестерня имеет диаметр ровно в два раза больше планетарной передачи. Каждый шатун планетарного механизма делительный диаметр шестерни движется по прямой внутреннего диаметра шестерни.
Бессердечным двигателем приводится в движение только главное колесо в центре устройства. Ось планетарной передачи соединена с этим колесом.
Для создания движения закрылка крыла нужен только один шатун.
Для активного контроля кручения или качки машущего крыла с двумя ступенями в шахматном порядке. кривошипные штифты необходимы. Главный шатунный штифт генерирует взмахами и сдвигом по фазе движения пальца шатунной рукоятки скручивание или качание крыла.
Здесь при силовом полете штифт управляющей кривошипа всегда идет впереди главный шатун — как передняя кромка крыла по сравнению с основной запасной пока машет.
Вертикальное движение обоих шатунов передается с помощью кулис. к машущему крылу (рычаги см. в приводном механизме EV4).
В планирующем полете обе скотч-хомуты находятся в своих центр хода и, соответственно, угол поворота и угол установки крыла.
При остановке привода в планирующем полете в мертвая точка кривошипа способна воспринимать любые силы крыла в вертикальном положении направление.Следовательно, тормоз не нужен.
Кривошип кардана
изготовлен для
EV1.
Этот специальный планетарный механизм преобразует вращательное движение
электродвигатель (номинальная входная мощность 85 Вт) в прямую линию
возвратно-поступательное движение шатунной шейки. Скотч
ярмо использовалось только для переключения между планирующим и двигательным полетом.
- Скольжение достигается за счет ориентации линии траектории главного шатунного пальца по горизонтали.
- Полет с приводом достигается за счет ориентации линии траектории главного шатунного шатуна по вертикали.
На верхней части коробки передач находятся два триггера для двух разных настроек скольжения. позиции. Двигатель остановился в мертвой точке кривошипа. Таким образом положение глиссирования было заблокировано.
Шаг 2 мм между главной и управляющей рукояткой булавка видна на фотографии.
Чертеж кривошипно-шатунного привода в сборе
Для получения дополнительной информации и технических данных, пожалуйста, см .:
Хомуты
в приводном механизме EV4.
Хорошо видно горизонтальное прорезное основное ярмо (со стальным ползунком).
По-прежнему узнаваем наклонный сдвиг рычага управления скотчем сзади.
2.Переход между планирующим и силовым полетом путем реверсирования вращения в От EV1 до EV4
При каждом реверсе вращения внутренняя шестерня вращается на 90 градусов между двумя соответствующими блоками. Он может свободно перемещаться между остановки.
Предпосылки для переключения и сохранения силового полета положение внутренней шестерни — постоянное тормозное усилие на на основной шатун или на кулису.
Траектория меньшего пальца шатунной ручки (шатун управления сиреневый, штифт главного шатуна синий) наклониться в планирующем полете хорошо, чтобы заметить его по его скотч-коромысле.
3. Переход от планирующего полета к силовому. ступенчатой системой переключения с сервоприводом в EV5 и EV6
Переделка карданного механизма
Переключение между планирующим и силовым полетом на EV5
и на EV6 больше не влияло реверсирование
направление вращения, но с помощью сервоуправляемой ступенчатой системы переключения
внутренняя шестерня карданного механизма. Стопорный болт внутреннего
передача приводилась в действие простым сервоприводом с дистанционным управлением.Также эта вариация
прилагается к планам
отдельных компонентов (PDF 1,4 MB) с 18 карандашами
рисунки на немецком языке.
Только при переключении между планирующим и силовым полетом постоянное тормозное усилие необходим на главном шатунном шатуне или на кулисной вилке. Впоследствии установка внутренней шестерни будет заблокировано.
Только при переключении между планирующим и силовым полетом постоянное тормозное усилие необходим на главном шатунном шатуне или на кулисной вилке.Впоследствии установка внутренней шестерни будет заблокировано.
4. Прямая регулировка
угол поворота с сервоприводом
В дополнение к главному приводу только с одним направлением вращения необходим сервопривод с реверсивным направлением вращения.
Производительность сервопривода зависит от возникающих сил кривошипа. и желаемый контроль скорости. Предназначен для краткосрочного использования.
Угол взмахов крыльев регулируется бесступенчато.
Для одиночных ступеней представлена линия траектории главного пальца кривошипа. как белая пунктирная линия.
В данном случае двигатель внутреннего сгорания проектировался как основной привод и электродвигатель в качестве сервопривода. Эта концепция привода для орнитоптеров это очень надежно, ведь переход на глиссирование полет также можно использовать при выходе из строя главного привода.
Такой привод с изменяемым ходом пока не построен.
5. Ссылки по теме
- Здесь вы можете найти информацию о моем патентном описании.
механизма карданной передачи с реверсом направления вращения (как п.2):
https://depatisnet.dpma.de/DepatisNet/depatisnet?action=pdf&docid=DE000002628846C2
Оба других варианта кривошипа я не подавал на патент. - Корнельский университет, Кинематические модели для дизайна, гипоциклоида
Прямолинейный механизм:
http: // kmoddl.library.cornell.edu/model.php?m=137
К моделям орнитоптеров EV5 и EV6
Образец механизма связи | Блог Дэйва
Загрузите образцы и эксперименты для разработчика и симулятора механизма связи.Круг Хобермана | |
Механизм основан на хорошо известном механизме Hoberman Sphere Чака Хобермана.
Загрузите файл: hoberman.linkage2
Посмотрите видео:
Сова Pussycat Mechanism | |
Механизм обратной инженерии на основе Owl и Pussycat Automaton Кейта Ньюстеда, которые можно увидеть здесь. Кейт, если вы не хотите, чтобы это публиковалось, дайте мне знать, и я удалю его.
Загрузите файл: owlpussycat.linkage2
Посмотрите видео:
Осциллятор с изменяемой скоростью | |
Этот колебательный механизм изменяет скорость во время колебания.Вращающийся вход обычно изменяет скорость осциллятора, но добавленный механизм быстрого возврата Whitworth изменяет ее двумя способами.
Скачайте файл: speedchangeoscillator.linkage2
Посмотрите видео:
Стол с подвижным уровнем | |
Это механизм выравнивания стола с цепным соединением. Стол перемещается влево и вправо, оставаясь на одном уровне с исходным положением.
Загрузите файл: leveltable.linkage2
Посмотрите видео:
Соединительная апертура | |
Это простой механизм апертуры с использованием звеньев.
Загрузите файл: aperature.linkage2
Посмотрите видео:
Раздвижная апертура | |
Это сложный апертурный механизм, использующий скользящие соединения изогнутой траектории.
Загрузите файл: aperture3.linkage2
Посмотрите видео:
Сдвинуть к слайдеру | |
Это пара скользящих звеньев, положение которых контролируется другим скользящим соединителем. Это только недавно поддерживается в программе Linkage.
Загрузите файл: slideslide.linkage2
Посмотрите видео:
Фронтальный погрузчик | |
Модель ковшового механизма фронтального погрузчика.На самом деле я никогда не пытался использовать ввод «Всегда вручную» во время экспорта видео, но он работал нормально, даже если анимация работала медленнее, чем в реальном времени.
Загрузите файл: bucket.linkage2
Посмотрите видео:
Альтернативный фронтальный погрузчик | |
Еще одна модель ковшового механизма фронтального погрузчика. Геометрия этого мне нравится больше, чем другого.
Загрузите файл: bucket2.linkage2
Посмотрите видео:
Испытание шестерен и цепей | |
Это тестовый механизм, который я создал, когда впервые добавил элементы шестерни и цепи. Я только что обновил видео, чтобы показать движущиеся цепи, что есть в последней (3.2.10) версии программного обеспечения.
Скачайте файл: rockinggears.linkage2
Посмотрите видео:
Механизм транспортировки коробки | |
Пользователь хотел построить механизм транспортировки ящиков, но в конструкции использовалась проблемная связь; симулятор не может имитировать какой-либо механизм.Это переработка этого механизма.
Скачайте файл: boxtransport.linkage2
Посмотрите видео:
Механизм быстрого возврата Whitworth | |
Два механизма быстрого возврата Уитворта или что-то в этом роде.
Загрузите файл: whitworth.linkage2
Посмотрите видео:
Карданный прямой механизм | |
Карданный прямой механизм.Для рисования прямых линий используются шестеренки.
Скачайте файл: cardan.linkage2
Посмотрите видео:
Четырех стержневой рычажный механизм | |
Простая четырехстворчатая навеска с моторизованным якорем.
Загрузите файл: fourbar.linkage2
Посмотрите видео:
Механизм улыбки | |
Нарисуйте улыбку.
Скачайте файл: smile.linkage2
Посмотрите видео:
Прямой механизм Hoeken | |
Механизм прямой линии Hoeken Карла Хёкена. Механизм по какой-то причине появляется в сети с альтернативным написанием его имени. На странице в Википедии об этом механизме, кажется, есть вариант, который не так точен, как механизм, показанный здесь и в других местах в Интернете.
Загрузите файл: hoeken.linkage2
Посмотрите видео:
Механизм параллельного перемещения | |
Этот механизм показывает, как может работать заводской механизм перемещения деталей.
Скачайте файл: parallel.linkage2
Посмотрите видео:
Верхний механизм складывания автомобиля | |
Механизм складывания крыши кабриолета.
Скачать файл: foldtop.linkage2
Посмотрите видео:
Простой механизм скольжения | |
Простой скользящий механизм, который использует скользящий соединитель для перемещения ссылки.
Скачайте файл: Sling.linkage2
Посмотрите видео:
Простой механизм скольжения 2 | |
Простой скользящий механизм, который использует связь для перемещения скользящего соединения.
Загрузите файл: Sling2.linkage2
Посмотрите видео:
Эллиптический тренажер | |
Эллиптический тренажер с обзором левой и правой ноги, а также с видом на обе ноги внахлест.
Загрузите файл: elliptical.linkage2
Посмотрите видео:
Машина с несколькими слайдерами | |
Несколько скользящих соединителей.
Загрузите файл: Sling3.linkage2
Посмотрите видео:
Линейный привод машины | |
Пример привода, перемещающего скользящий соединитель, который затем перемещает связь.
Загрузите файл: actator2.linkage2
Посмотрите видео:
Странный сложный механизм | |
Это образец различных ссылок, соединителей и входов, которые в совокупности образуют необычный рисунок рисунка.
Скачать файл: complex.linkage2
Посмотрите видео:
Ножничный подъемник | |
Ножничный подъемник простой.
Загрузите файл: scissor.linkage2
Посмотрите видео:
Механизм переменной скорости | |
Механизм быстрого возврата Whitworth, используемый для создания вращающегося механизма с переменной скоростью вращения.
Загрузите файл: varyspeed.linkage2
Посмотрите видео:
Ваттный прямолинейный механизм | |
Ваттный прямолинейный механизм в вертикальной паровой машине.
Загрузите файл: watt.linkage2
Посмотрите видео:
Линейный привод Thow Distance Test | |
Механизм для проверки расстояния выброса линейных приводов.Используется обратно, и впервые была добавлена функция линейного привода.
Скачайте файл: throwtest.linkage2
Посмотрите видео:
Поршневой механизм | |
У поршневого механизма все части механизма нарисованы светлым цветом, чтобы слой рисунка был более заметным.
Скачать файл: поршневой.linkage2
Посмотрите видео:
Механизм с изогнутой направляющей | |
Раздвижной соединитель по изогнутой траектории.
Загрузите файл: curvedsliding.linkage2
Посмотрите видео:
Изогнутая направляющая скольженияМеханизм 2 | |
Раздвижной соединитель по изогнутой траектории.
Загрузите файл: curvedsliding2.linkage2
Посмотрите видео:
Механизм изогнутого пути | |
Раздвижные соединения для перемещения ссылки по изогнутой траектории.
Загрузите файл: curvedpath.linkage2
Посмотрите видео:
Механизм подъема шарика | |
Это механизм подъема шарика для кинетической скульптуры катящегося шарика, также известной как мраморная дорожка. Эта конструкция была использована для создания физической версии механизма, как показано в одном из видео ниже.
Скачать файл: balllifter.linkage2
Посмотрите видео:
Посмотрите видео:
Зубчатый механизм | |
Четыре последовательных шестерни.Фактически это шесть шестерен на четырех валах. Когда редуктор находится в зацеплении с двумя другими шестернями, это может создать единый цельный редуктор с двумя шестернями, работающими как единое целое.
Загрузите файл: fourgears.linkage2
Посмотрите видео:
Орбитальный механизм | |
Комбинация цепи и шестерни для создания орбитальной машины типа солнце-планета-луна.
Скачайте файл: orbit.linkage2
Посмотрите видео:
Усиленный колебательный механизм | |
Линейные и вращающиеся входы могут напрямую создавать колебательные механизмы, которые вращаются почти на 180 градусов. Используя шестерни для преобразования колебаний с повышением частоты, колеблющиеся части могут перемещаться за пределы 180 градусов.
Скачать файл: ampified.linkage2
Посмотрите видео:
Механизм клапана локомотива Stephenson | |
Это вариант клапанного механизма Стефенсона.В моделировании прямое-нейтральное-обратное управление дополняется линейным приводом с ручным вводом. На видео показано, как его перемещают в разные положения.
Загрузите файл: stephenson.linkage2
Посмотрите видео:
Ползунок пересечения | |
Ползунок перемещается в положение на пересечении двух вращающихся звеньев. Второе вращающееся звено приводится в движение концом первого вращающегося звена, что приводит к неравномерной скорости во время вращения.Скользящее звено имеет два скользящих соединителя, скользящих по одному из вращающихся звеньев, и один скользящий соединитель, чтобы разместить его на другом вращающемся звене.
Скачайте файл: crossction3.linkage2
Посмотрите видео:
Мое модельное портфолио: Мэтт Папазян из Cardan Capital Partners
Мэтт Папазян
Партнер-учредитель
Cardan Capital Partners
Какова ваша общая инвестиционная философия?
На основе постоянного анализа экономического цикла и его силы или отсутствия таковой мы распределяем активы между рисковыми активами и долгосрочными казначейскими облигациями.Мы начнем с относительной оценки акций и облигаций, чтобы определить распределение между ними, исходя из терпимости клиента к риску.
В рамках фиксированного дохода, если экономические и рыночные индикаторы сигнализируют об устойчивости, мы будем направлять на высокую доходность больше, чем казначейские облигации. Что касается капитала, то — опять же, в зависимости от тенденций в экономических и рыночных данных — мы будем перевешивать либо ростовые, либо стоимостные сегменты рынка.
По сравнению с другими классами активов с фиксированным доходом, высокая доходность обеспечивает возможность получения конкурентоспособной прибыли при высоких темпах экономического роста, учитывая ее традиционную корреляцию с рынками акций.Казначейские облигации исторически обеспечивали надежную защиту во время приступов падений фондового рынка как внутри, так и за пределами рецессии. Сегменты стоимости и роста в долгосрочной перспективе демонстрируют превосходство по сравнению с широким рыночным индексом, таким как S&P 500.
Мы используем то, что мы называем «четырьмя сигналами», для поддержки большинства наших управляемых портфелей. Их:
- Сигнал распределения, который обеспечивает механизм, который может стать более агрессивным или защитным при распределении между акциями и фиксированным доходом.
- Сигнал наклона стиля, который обеспечивает механизм перехода между растущими или стоимостными акциями
- Сигнал рецессии, который обеспечивает механизм, позволяющий стать более защитным в периоды, когда рецессия более вероятна, чем нет.
- Сигнал волатильности, который обеспечивает механизм, позволяющий стать более защитным в периоды, когда волатильность фондового рынка вспыхивает и увеличивается потенциал рыночных спадов.
Какие модели вы предлагаете клиентам?
Мы сами управляем моделями. Они варьируются от агрессивных и умеренных портфелей акций до облагаемых налогом и не облагаемых налогами стратегий с фиксированным доходом, а также тактических моделей распределения. В зависимости от модели основными целями могут быть прирост капитала, доход и / или сохранение капитала. В сочетании с целями и задачами клиента модели собираются вместе, чтобы создать распределение домохозяйств.
Как вы видите выбор менеджера?
Мы не занимаемся активным подбором менеджеров, потому что в основном используем пассивные инвестиции через ETF.Как показали исследования, наиболее активным менеджерам трудно постоянно превосходить свои относительные показатели после учета гонораров. Есть менеджеры, которые превосходят. Задача состоит в том, чтобы найти их на основе потенциала, а не результатов.
Мы активно изучаем пассивные инвестиции, используя количественный и качественный анализ. Поскольку пассивные продукты построены на методологии индексации, мы тестируем данные на исторических данных, чтобы лучше понять, как разные индексы ведут себя в разных средах.Это помогает нам понять такие факторы, как стоимость и рост, а также в какие периоды экономического цикла они работают лучше всего.
С какими типами клиентов вы работаете?
Мы работаем в основном с состоятельными людьми и семьями из нескольких поколений. Среди наших клиентов — предприниматели, руководители компаний и профессионалы в таких областях, как право, медицина и архитектура. Мы также работаем с некоммерческими фондами. Наши новые клиенты — это, как правило, рекомендации от существующих клиентов и деловых партнеров.
Как вы используете активные и пассивные средства?
В основном мы активно используем пассивные фонды, то есть мы принимаем решения о распределении активов, используя экономические, рыночные данные и данные о настроениях, либо для ориентации на рискованные активы (акции и высокодоходные), либо для того, чтобы стать более оборонительными (казначейские облигации). Мы выражаем наши взгляды, инвестируя в пассивные ETF, которые, по нашему мнению, лучше всего отражают эти взгляды.
Есть ли у вас большие убеждения в менеджерах?
Себя.В конце концов, наши клиенты доверяют нам размещение своих денег таким образом, чтобы наилучшим образом сохранить и приумножить их благосостояние. Доллар здесь останавливается.
Какие-либо изменения в распределении или менеджерах по сравнению с прошлым годом?
Волатильность и падение рынка в четвертом квартале прошлого года переориентировали нас больше на акции по сравнению с фиксированным доходом. Кроме того, мы увеличили долю в стоимостных акциях. Что касается фиксированного дохода, мы ориентировались на высокую доходность и увеличили дюрацию в Treasurys.
Низкопрофильный механизм наведения антенны (APM)
Карданный механизм был разработан для точечных антенн Ka-диапазона и других устройств, его низкопрофильная конструкция оптимизирует размер антенны и радиочастотные характеристики. Конструкция исключает необходимость использования прижимных и отпускающих механизмов, сводя к минимуму вес и стоимость системы, одновременно повышая ее надежность.
Движение обеспечивается двумя поворотными приводами из семейства продуктов SENER Aeroespacial DTA, основанных на шаговых двигателях SUM, также разработанных и изготовленных SENER Aeroespacial.
Эта электромеханическая подсистема может быть установлена на разворачиваемых антенных панелях и / или на верхнем этаже спутника.
Опыт SENER Aeroespacial в механизмах наведения антенн
За более чем 50-летний опыт работы в аэрокосмической отрасли компания SENER Aeroespacial разработала и поставила многочисленные механические подсистемы с важнейшими функциями полета.
Механизмы наведения антенны для миссий JUICE, SOLAR ORBITER и BEPI COLOMBO Европейского космического агентства — это лишь некоторые из последних передовых продуктов, разработанных SENER Aeroespacial для институционального рынка.
Исходя из этого и за счет интеграции поворотных приводов компании из семейства DTA, SENER Aeroespacial предлагает этот низкопрофильный карданный механизм для наведения антенн Ka-диапазона и других приложений.
В следующей таблице показаны некоторые технические характеристики системы.
| Характеристика | Блок | |
| Масса | кг | <6 |
| Размеры | мм (Ш x Д x В) | <310 х 290 х 240 |
| Усилие рулевого управления | град | +/- 5 (до +/- 9) |
| Угол шага на выходе | град | <0.006º |
| Жесткость (kx, ky, kz) | Н / м | > 5,00E + 06 |
| Жесткость (krx, kry, krz) | Нм / рад | > 5,00E + 04 |
| Циклы наведения | > 10.000 | |
| Потребляемая мощность | Вт | 10 |
| Масса антенны | кг | <5 |
| Диапазон рабочих температур | ºC | -45 / + 100 |
| Уровень технологических исследований (TRL) | TRL8 (2020Q3) | |
| Устройство разблокировки | Не требуется.Самонесущий | |
ВЛИЯНИЕ ОСИ В ПРОМЕЖУТОЧНОМ ВАЛЕ НА ГРУЗОПОДЪЕМНОСТЬ ПАРНОГО КАРДАННОГО МЕХАНИЗМА
Конструкция промежуточного вала с подвижным в осевом направлении шлицевым соединением должна быть адаптирована к изменяемому положению оси вала. Эта конструкция также используется для уменьшения осевых сил, вызванных неточностью изготовления и сборки карданных механизмов.Осевая сила, создаваемая трением контактных поверхностей в шлицевом соединении, является функцией величины передаваемых крутящих моментов, шлицевых размеров, условий смазки и материалов, используемых для контактных поверхностей. Это вызовет дополнительные опорные нагрузки на поперечные шейки и опоры валов, а также недопустимые вибрации и шум во время работы, что повлияет на безопасность и срок службы карданного механизма. В статье представлен теоретический и эмпирический анализ карданных механизмов, которые были исследованы с осевыми усилиями в шлицевом соединении и без них, и их влияние на долговечность элементов механизма.
- Наличие:
- Корпоративных авторов:
Загребский университет
Факультет транспорта и дорожного движения
10000 Загреб, Хорватия - Авторов:
- Павич, B
- РАДОС, J
- Персе, S
- Дата публикации: 2001
Язык
Информация для СМИ
Предмет / указатель терминов
Информация для подачи
- Регистрационный номер: 00810097
- Тип записи: Публикация
- Файлы: TRIS
- Дата создания: 11 мая 2001 00:00
— параллельный сферический механизм с избыточным приводом как новая концепция подвижного телескопа
В статье описывается новая концепция сферического механизма для подвижных телескопов.В его основе лежит параллельная кинематическая структура с дублированием. Благодаря трехкратной перевороте конструкции и применению нескольких других инновационных концепций, Hexasphere достигает 100 градусов подвижности. Это позволяет использовать гексасферу в качестве основы для крепления телескопов. Такие телескопы можно оптимизировать для минимального веса или максимальной динамики. Ожидается, что предложенный механизм будет использоваться в новых роботизированных телескопах, используемых в настоящее время во многих областях астрономии и астрофизики, с упором на автоматизированные системы для тревожных наблюдений за небесными гамма-всплесками.
1. Введение
Существует множество механизмов реализации сферических движений. Сферические механизмы, которые позволяют вращать и ориентировать объект в пространстве, используются для многих важных операций. Они находятся в механизмах поворотных головок со шпинделями для станков, составляющих основу абсолютного большинства станков для 5-осевой обработки. Сборки телескопов, то есть механизмы их движения, также являются сферическими механизмами.Другая группа состоит из механизмов поворота разных антенн. Многие применения сферических механизмов предназначены для наведения оптических лучей.
Абсолютное большинство шаровых механизмов основано на шарнире Кардана. Его преимущество — высокая подвижность, часто ±. Первый основной недостаток карданных шарниров как серийных кинематических структур состоит в том, что они состоят из последовательности последовательных вращательных движений. Это приводит к необходимости того, чтобы последующие вращения несли привод и, таким образом, увеличивали массу конструкции.Кроме того, каркас конструкции разрушительно нагружается из-за изгиба. Следствием этого является невыгодное соотношение массы и жесткости и меньшие динамические возможности механизма. Добавление ошибок в цепочку частичных перемещений приводит к снижению точности позиционирования. Второй основной недостаток шарниров кардана заключается в том, что зенитное положение является единичным, что делает невозможным выполнение непрерывной траектории между всеми положениями в рабочем пространстве.
Все эти проблемы удалось обойти за счет принятия параллельных кинематических структур [1], где единственной формой нагрузки является либо сжатие, либо напряжение, все двигатели расположены на раме машины, а длина цепочек ошибок с суммированными ошибками составляет значительно ниже.Недостатком простых параллельных кинематических структур является то, что их рабочее пространство ограничено единичными положениями и столкновениями, наиболее часто используемые сферические соединения приобретают меньшую жесткость по сравнению со скользящими или вращательными соединениями, а нелинейное кинематическое преобразование между двигателями и рабочим органом требует короткого периода выборки. , чтобы добиться требуемой точности.
Крепления традиционных телескопов как на Земле, так и на орбите (на спутниках) основаны на карданном механизме.Сферические механизмы на основе кардана как серийные механизмы страдают зенитной особенностью и большой массой из-за нагружения рамы изгибом. Это можно улучшить с помощью механизмов, основанных на параллельной кинематической структуре (например, Hexapod), где нагрузка изменяется на растяжение-сжатие. Недавно построенный телескоп HPT на основе гексапода (рис. 1) имеет только 1/5 массы традиционного телескопа, но может наклоняться только на ±, прежде чем достигнет сингулярных положений и схлопнется [2]. Это ограничение можно значительно расширить, если задействовать параллельную кинематическую структуру с резервированием [3, 4].На основе этой идеи был предложен новый сферический механизм, подходящий для опор телескопов, названный Hexasphere, и построена функциональная кинематическая лабораторная модель. Он продемонстрировал, что Hexasphere может достигать рабочего пространства под углом ± 100 градусов. Опыт работы с параллельными кинематическими структурами показывает, что они могут достигать высокой жесткости и маневренности при малых массах. Единственный недостаток ограниченного рабочего пространства, обусловленный кинематическими особенностями, может быть устранен избыточным срабатыванием, что было продемонстрировано Hexasphere.
2. Концепция гексасферы
Первоначальная мотивация пришла из [5], где был предложен сферический механизм на рисунке 2. Утверждалось, что проблема с особенностями (ловкостью) решена. Эта структура была проанализирована на ловкость.
Положение платформы в пространстве описывается координатами, а положения приводов (удлинений подкосов) описываются координатами. Эти координаты ограничены ограничениями
Ловкость определяется как
где и — якобианы ограничений (1) относительно координат z и q .Ловкость варьируется от 0 (худшее значение, соответствующее особенности) до 1 (лучшее значение). Он выражает переход между входными-выходными скоростями и входными-выходными силами механизма.
Используя этот подход, была вычислена ловкость механизма, показанного на Рисунке 2. Диапазон ловкости от 0,0065 до 0,6307 (рисунок 4). Он отличен от нуля, и рабочее пространство не имеет особенностей, но ловкость меняется в течение большого интервала (в сто раз), а минимальные значения очень близки к нулю.Это невыгодно, потому что ловкость описывает соотношение между движущей силой и действующими силами в рабочем органе.
Для решения этих проблем была предложена концепция гексасферы [6] (рисунок 3). Для повышения маневренности был применен принцип дублирующего срабатывания [1]. Резервное срабатывание устраняет проблемы, связанные с параллельной кинематикой: сингулярности не возникают, неожиданно количество столкновений может быть ограничено, жесткость и динамика значительно увеличены, кинематическая точность улучшена, и возможна онлайн-калибровка.Результатом является то, что параллельные кинематические структуры с дублированием и дублированием функционально эквивалентны машинам с серийными кинематическими структурами, но имеют значительно улучшенные механические свойства (жесткость, динамику, точность). Это было успешно продемонстрировано на машинах Trijoint 900H [7] и Sliding Star [4] для декартового поступательного движения. Остальные виды механизмов с серийной кинематической структурой — это сферические механизмы на карданных шарнирах. Хотя одним из наиболее успешных применений параллельных кинематических структур является параллельная поворотная головка для 5-осевой обработки, она обеспечивает лишь ограниченную подвижность.Поиск полнофункционального эквивалента шарниров кардана с подвижностью ± с использованием параллельных кинематических структур долгое время было открытой проблемой.
Концепция Hexashere была использована в качестве основы механизма, показанного на Рисунке 2, и в нем используется принцип дублирующего срабатывания. Увеличено количество резервных стоек. Hexasphere — это комбинация Hexapod для приведения в действие и подвески платформы на пассивном сферическом шарнире. Hexasphere срабатывает с трехкратным резервированием.Влияние высокой степени резервирования привода на маневренность очень положительно. Ловкость Hexasphere была проанализирована с помощью того же подхода: его результаты показаны на рисунке 5. Ловкость колеблется только в интервале от 0,33 до 0,65. Ловкость меняется во всем рабочем пространстве всего в два раза, и ее значения довольно высоки. Требуемые усилия срабатывания всего в 2-3 раза превышают действующие силы в рабочем органе.
3. Конструкция Hexasphere
Механизм Hexasphere имеет открытую задачу параллельного сферического механизма с большими углами наклона, положительно закрытого.Это демонстрирует, что параллельная кинематическая структура с резервным приводом обеспечивает возможность сферического движения теперь с подвижностью ± и с сохранением всех преимуществ параллельных механизмов. Новые принципы решения, позволяющие создать Гексасферу, следующие. Платформа соединена с рамой центральным шаровым шарниром. Следовательно, у механизма всего 3 степени свободы, а для движения достаточно всего 3 исполнительных механизмов. Однако они допускают движение только на небольшие углы, потому что для больших движений особые положения возникают, когда платформа приобретает дополнительную неконтролируемую степень свободы и схлопывается.Таким образом, платформа подвешена на 6 стойках. Результат — не только устранение особенностей, но и очень хорошая маневренность во всем рабочем пространстве. Другой важный принцип заключается в том, что стойки размещаются на стойках, благодаря чему столкновения между стойками и платформой не происходят при больших поворотах (Рисунок 6). Остальные размеры также необходимо отрегулировать соответствующим образом.
Помимо упомянутых принципов решения Hexasphere, было необходимо использование многих инновационных компонентов.Это прежде всего шаровые шарниры с существенно повышенной подвижностью. Они реализуются либо чисто механически (но, по крайней мере, с измерением движения внутреннего шарнира для калибровки, если даже не с тормозами) [8], либо с помощью электромагнитного сферического шарнира (рисунок 7) [9].
Стойки Hexasphere могут быть реализованы разными способами. Они изображены на рисунке 8. Стойки могут быть переменной длины (просто выдвигающиеся или телескопические), с фиксированной длиной на скользящей тележке или на основе роботизированной руки с поворотными шарнирами.Выбранная концепция подкосов для изготавливаемой функциональной модели — это подкос фиксированной длины на каретке скольжения (рисунок 9). Используя эти принципы, было выполнено проектирование функциональной модели Гексасферы и была изготовлена функциональная модель (Рисунок 10).
4. Применение гексасферы для телескопов
Гексасфера — это новый сферический механизм, который может быть успешно использован для создания новых опор телескопов. Две такие возможные концепции показаны на рисунке 11.Механизмы, основанные на концепции Hexasphere, могут быть оптимизированы для минимального веса или максимальной динамики.
Другим важным свойством Hexasphere является самокалибровка, которая активируется с резервированием и, следовательно, с избыточностью измеряется, то есть способность определять размеры всего механизма, просто используя внутренние датчики, без какого-либо внешнего устройства. Это можно использовать для онлайн-компенсации тепловых деформаций.
Ожидается, что предлагаемая система будет играть роль в новых роботизированных телескопах, используемых в настоящее время во многих областях астрономии и астрофизики, с упором на автоматизированные системы для тревожных наблюдений за небесными гамма-всплесками.В этих системах существует потребность в быстром перемещении к положению на небе, которое не может быть предсказано и объявляется спутниковыми системами оповещения, основанными на спутниках, несущих мониторы гамма-всплесков. Таким образом, это положение может быть где угодно на (видимом) небе. Здесь важна как можно более быстрая реакция, поскольку в некоторых случаях мгновенное оптическое излучение, связанное с гамма-всплеском, наблюдалось одновременно с гамма-всплеском. Гексасферу можно рассматривать как для малых, так и для больших телескопов, но все же возможно ее применение для мониторов с широким полем зрения, включая камеры с контролем всего неба.Здесь Hexasphere будет оптимизирован для динамических приложений.
Другими применениями гексасферы могут быть автоматизированные телескопы / антенны, размещаемые на спутниках, на Луне или других планетах, где вес гексасферы будет оптимизирован.
В будущем планируется спроектировать, разработать и испытать прототип, несущий небольшую роботизированную телескопическую систему / камеру, чтобы более подробно изучить и протестировать ее производительность в этом приложении.
5. Выводы
В статье описан новый сферический механизм Hexasphere, пригодный для крепления телескопов.Подвижность Гексасферы составляет ± 100 градусов. Механизмы, основанные на концепции Hexasphere, могут быть оптимизированы для минимального веса или максимальной динамики.
Ожидается, что предлагаемая система будет играть роль в новых роботизированных телескопах, используемых в настоящее время во многих областях астрономии и астрофизики, с упором на автоматизированные системы для тревожных наблюдений за небесными гамма-всплесками.
Благодарности
Авторы признательны за любезную поддержку со стороны проекта MSMT MSM 6840770003, проекта GACR 101/08 / H068 и Фонда медиа-лаборатории Чешского технического университета.Рене Худек выражает признательность за поддержку со стороны Грантового агентства Чешской Республики, грант 102/08/0997.
HexaSphere — Матей Карасек
Разработка прототипа нового сферического механизма с параллельной кинематической структурой и дублированным срабатыванием, разработанного в продолжение моей магистерской диссертации с сокурсниками Чешского технического университета.
Сферический механизм HexaSphere был разработан как альтернатива традиционному карданному шарниру. Как механизм с избыточным приводом с параллельной кинематической структурой, он имеет большое рабочее пространство без сингулярностей (± 100 °) с потенциально высокой жесткостью, точностью и быстрой динамикой.В следующих видеороликах представлен прототип механизма и его доступное рабочее пространство, а также демонстрационные приложения:
Для получения дополнительных сведений посетите веб-сайт проекта HexaSphere.
Публикации по теме:
- М. Валашек, Я. Зича, М. Карасек и Р. Худец, «Гексасфера — параллельный сферический механизм с избыточным действием как новая концепция гибкого телескопа», Успехи в астрономии, вып. 2010, стр. 1–6, 2010.
[Bibtex]@article {Valasek2010a, abstract = {{\ textless} p {\ textgreater} В статье описывается новая концепция сферического механизма для подвижных телескопов.В его основе лежит параллельная кинематическая структура с дублированием. Благодаря трехкратной переэкспонированной структуре и применению нескольких других инновационных концепций, Гексасфера достигает подвижности {\ textless} math {\ textgreater} {\ textless} mo {\ textgreater} ± {\ textless} / mo {\ textgreater} {\ textless} / math {\ textgreater} 100 градусов. Это позволяет использовать гексасферу в качестве основы для крепления телескопов. Такие телескопы можно оптимизировать для минимального веса или максимальной динамики. Ожидается, что предложенный механизм будет использоваться в новых роботизированных телескопах, используемых в настоящее время во многих областях астрономии и астрофизики, с упором на автоматизированные системы для тревожных наблюдений за небесными гамма-всплесками.{\ textless} / p {\ textgreater}}, author = {Вал {\ '{a}} {\ v {s}} эк, Майкл и Зича, Йозеф и Кар {\' {a}} сек, Мат {\ v {e}} j и Худек, Рене} , doi = {10.1155 / 2010/348286}, issn = {1687-7969}, journal = {Достижения в астрономии}, pages = {1–6}, publisher = {Hindawi Publishing Corporation}, title = {{Гексасфера - параллельный сферический механизм с избыточным приводом как новая концепция гибкого телескопа}}, url = {http://www.hindawi.com/journals/aa/2010/348286/}, volume = {2010}, год = {2010} } - М.Карасек и М. Валашек, «Мехатронные сферические шарниры для повышения мобильности», в Вычислительной механике, Град Нектины, Чешская Республика, 2009, с. 8.
[Bibtex]@inproceedings {Karasek2009, address = {Град Нектины, Чешская Республика}, author = {Kar {\ '{a}} sek, Mat {\ v {e}} j и Val {\' {a}} {\ v {s}} ek, Michael}, booktitle = {Вычислительная механика}, pages = {8}, title = {{Мехатронные сферические шарниры для повышения мобильности}}, год = {2009} } - М.Валашек и М. Карасек, «Кинематический анализ гексасферы», в «Инженерная механика», 2009 г., Свратка, Чешская Республика, 2009 г., с. 8.
[Bibtex]@inproceedings {Valasek2009, адрес = {Свратка, Чешская Республика}, author = {Val {\ '{a}} {\ v {s}} ek, Майкл и Kar {\' {a}} sek, Mat {\ v {e}} j}, booktitle = {Инженерная механика 2009}, pages = {8}, title = {{Кинематический анализ HexaSphere}}, год = {2009} } - М.