Сила тяги
Сила тяги: определение
Определение 1
Силой тяги называют силу, прикладываемую к телу для поддержании его в постоянном движении.
Прекращение действия силы тяги приводит к остановке вследствие трения, вязкости окружающей среды и других противодействующих движению сил.
Тело, на которое не действуют силы, движется с постоянной скоростью $v = const$ (первый закон Ньютона). Частным случаем такого движения является состояние покоя ($v = 0$). Движение с постоянной скоростью называют состоянием инерции. Чтобы вывести тело из такого состояния, нужно приложить к нему силу. Скорость тела в этом случае изменится, т.е. оно получит ускорение (либо замедление, которое можно считать отрицательным ускорением).
Величина ускорения обратнопропорциональна массе тела (чем оно массивнее, тем труднее его вывести из состояния инерции) и прямопропорциональна интенсивности приложенной силы. Таким образом:
$F = m \cdot a$,
где:
- $F$ — сила,
- $m$ — масса,
- $a$ — ускорение.


Замечание 1
Эта формула отражает Второй закон Ньютона.
Формулы для расчета
В качестве примера силы тяги, выводящей тело из состояния покоя, можно рассмотреть спортсмена, поднимающего штангу. В исходном состоянии штанга находится в состоянии инерции (остается неподвижной). Когда спортсмен отрывает ее от земли, его мышцы должны сокращаться с такой силой, чтобы она превысила вес штанги, т.е. силу, с которой ее притягивает гравитационное поле Земли. Если штангисту удастся оторвать штангу от пола — значит она переместится вверх на некоторое расстояние, т.е. получит ускорение. Т.е. силой тяги, двигающей данный снаряд, является сила сокращающихся мышц спортсмена. При этом должно соблюдаться условие:
$F_м$ > $F_т$, т.е. $F_м$ >$ m \cdot g$,
где $F_м$ — сила мышц (в данном случае сила тяги), $F_т$ — сила тяжести (гравитация), $m$ — масса, $g$ — ускорение свободного падения.
Состояние движения по инерции следует отличать от равномерного движения, когда сила тяги уравновешивается противодействующими силами.
$F = m \cdot \frac{v}{t}$
Здесь ускорение выражено как частное от деления скорости на время разгона.
Силу тяги можно также выразить через мощность — способность некоторого источника энергии совершать работу. Чем мощность выше — тем за меньшее время этот источник разовьет силу, способную разогнать тело массой $m$ до требуемой скорости $v$. Работа же прямопропорциональна силе, которая ее совершила:
$A = F \cdot s$,
где $s$ — расстояние, на которое сила переместила данное тело.
Поскольку расстояние можно выразить через скорость и время,
$s = v \cdot t$,
а мощность есть работа, выполняемая в единицу времени
$N = \frac{A}{t}$
можно составить уравнения:
$\frac{A}{t} = \frac{F \cdot v \cdot t}{t} \implies N = F \cdot v \implies F = \frac{N}{v}$
Пример 1
Вычислить силу тяги автомобиля, движущегося с ускорением $3 м/с^2$, если его масса составляет 1,5 тонны, а сила трения — 10% от силы тяжести.
Рассмотрим силу тяги как сумму двух сил:
- разгоняющей автомобиль с заданным ускорением: $F_1 = m \cdot a$, где $m$ — масса, $a$ — ускорение;
- преодолевающей силу трения: $F_2 = \mu \cdot m \cdot g$, где $\mu$ — коэффициент силы трения, $g$ — ускорение свободного падения.
Подставив числовые значения в формулу
$F = F_1 + F_2 = m \cdot a + \mu \cdot m \cdot g$
получим, попутно переведя тонны в единицы СИ килограммы,
$F = 1500 \cdot 3 + 0,1 \cdot 9,8 \cdot 1500 = 1500 \cdot (3 + 0,98) = 5970$
Ответ: 5970 ньютонов.
Как летает квадрокоптер, пропеллеры и двигатель в подробностях
Чтобы понимать, как работает квадрокоптер, надо разобраться в его конструкции, двигателях и направление вращения пропеллеров.
Научиться управлять дроном в любом направлении сегодня очень легко. Они также способны плавно зависать в воздухе на одном месте. Конструктивные особенности его дизайна и полетных характеристик сильно отличаются от самолета или вертолета.
В этом статье мы рассмотрим, как летает квадрокоптер, требуемое направление двигателей, их конфигурацию, настройку, конструкцию пропеллеров, а также тягу двигателя квадрокоптера и необходимые расчеты. Также покажем несколько отличных и интересных видео на эти темы.
Как работает квадрокоптер
Как квадрокоптер зависает или летит в любом направлении, поднимается или опускается в одно мгновение, от прикосновений к ручке пульта дистанционного управления. Дроны способны летать автономно через запрограммированное программное обеспечение для навигации по маршрутным точкам и летать в любом направлении от точки к точке. Давайте рассмотрим используемые технологии в мультикоптерах в подробностях.
Направление вращения пропеллеров наряду со скоростью двигателя дрона, что делает возможным его полет и маневренность. Пульт радиоуправления квадрокоптером отправляет информацию контроллеру на беспилотнике, и передает данные двигателям через их электронные схемы управления скоростью (ESC) о тяге, оборотах, и направлении. Контроллер полета объединяет данные IMU (инерциального измерительного модуля), гироскопа и GPS перед подачей сигналов двигателям квадрокоптера о тяге и скорости вращения ротора.
Контроллер полета объединяет данные IMU (инерциального измерительного модуля), гироскопа и GPS перед подачей сигналов двигателям квадрокоптера о тяге и скорости вращения ротора.
Несмотря на то, что современные технологии беспилотных летательных аппаратов и квадрокоптеров являются современными, они все еще используют старые принципы парного полета, гравитации, действия и реакции.
При изготовлении квадрокоптеров, винтов и конструкции двигателя учитываются основные 4 силы, влияющие на весь полет: вес, подъем, тяга и также являются важными факторами. Математика используется для расчета тяги двигателя квадрокоптера, в то время как аэродинамика самолета используется для расчета винта и движения воздуха над, под и вокруг квадрокоптера.
Важность понимания того, как летает и работает квадрокоптер
С небольшим опытом управления полетом, квадрокоптер становится практически автоматическим. Вы перемещаете джойстики на пульте радиоуправления, направляющие дрон в любом направлении, в котором вы хотите, чтобы он летел. Нам не нужно думать о том, что делают двигатели или пропеллеры.
Нам не нужно думать о том, что делают двигатели или пропеллеры.
Теперь предположим, что мультикоптер полетел неправильно. Может быть, его тянет в каком-то направлении, и он не зависает на одном месте. Хорошее понимание того, как летает и работает квадрокоптер, поможет вам найти проблему с двигателем или пропеллером, особенно если визуальный осмотр не выявил неисправности.
Когда вы понимаете конструкцию пропеллеров (винтов) квадрокоптера и тягу двигателя, у вас появляется возможность внести изменения в свой дрон. Например, снять камеру и установить что-то другое, например датчик времени полета или лидар. Полеты с дополнительным весом влияют на контроль, полет и баланс беспилотника.
Если вы проектируете или создаете свой собственный квадрокоптер, то понимание конструкции двигателя и винта является важной информацией. Вам нужно подобрать правильную конфигурацию двигателя квадрокоптера, соответствующие пропеллеры, электронные схемы управления скоростью, а также IMU и GPS вместе с соответствующим корпусом.
Объяснение направления вращения двигателя и гребного винта Quadcopter
Как летает квадрокоптер
Изменения на пульте дистанционного управления, посылают сигналы на центральный полетный полета. Центральный контроллер полета передает эту информацию в электронные регуляторы скорости (ESC) каждого двигателя, которые, направляют каждый двигатель на увеличение или уменьшение скорости.
Движение ручки дистанционного управления → Центральный контроллер полета → Электронные схемы управления скоростью (ESC) → Двигатели и пропеллеры → Движение квадрокоптера или зависание.
Центральный полетный контроллер
Теперь центральный полетный контроллер также получает информацию от IMU, гироскопа, модулей GPS и датчиков обнаружения препятствий, если они установлены на квадрокоптере. Он выполняет вычислительные расчеты с использованием запрограммированных параметров полета и алгоритмов, а затем отправляет эти данные в электронные контроллеры скорости.
Фактически, большинство полетных контроллеров включают в себя IMU, GPS, гироскоп и множество других функций для контроля полета и стабильности квадрокоптера. Довольно часто они имеют второй резервный инерциальный измерительный модуль и другие функций безопасности, такие как возврат на точку взлета.
Довольно часто они имеют второй резервный инерциальный измерительный модуль и другие функций безопасности, такие как возврат на точку взлета.
Примером полетного контроллера послужит новый DJI N3 Flight Controller. Он имеет множество функций и может работать с различными двигателями.
ESC — электронные регуляторы скорости (оборотов)
Электронный регулятор скорости (ESC) — это электронная схема, установленная на каждом двигателе и предназначенная для изменения оборотов электродвигателя, его направления, а также торможения.
Электронные регуляторы скорости являются важным компонентом современных квадрокоптеров. Они предоставляют высокую мощность, высокую частоту и 3-фазный переменный ток для двигателей. Одновременно с этим, ESC очень маленькие и компактные. Квадрокоптеры и дроны полностью зависят от переменной скорости двигателей, приводящих в движение пропеллеры.
Направление пропеллеров и двигателей квадрокоптера
Направление пропеллеров для вертикального подъем
Вертикальный подъем зависит от направления вращения пропеллеров. Для того чтобы дрон поднялся в воздух, необходимо создать подъемную силу, равной силе гравитации или превышающей ее. Это основная идея взлета самолетов, которая сводится к контролю восходящей и нисходящей силы.
Для того чтобы дрон поднялся в воздух, необходимо создать подъемную силу, равной силе гравитации или превышающей ее. Это основная идея взлета самолетов, которая сводится к контролю восходящей и нисходящей силы.
Квадрокоптеры используют конструкцию двигателя и направление вращения винта для создания требуемой тяги, чтобы управлять силой тяжести, воздействующей на летательный аппарат.
Вращение винтов приводит к вытеснению воздуха. Все силы приходят парами (Третий Закон Ньютона), что означает, для каждой силы действия существует равная (по размеру) и противоположная (по направлению) сила противодействия. Поэтому, когда ротор толкает воздух вниз, воздух толкает ротор вверх. Чем быстрее вращаются роторы, тем больше подъемная сила и наоборот.
Дрон может делать три вещи в вертикальной плоскости: зависать, подниматься или опускаться.
Зависание на месте – для зависания, тяга четырех роторов толкает дрон вверх и должна быть точно равна силе гравитации, притягивающей его вниз.
Подъем вверх – достигается путем увеличения тяги (скорости) четырех роторов квадрокоптера так, чтобы сила, направленная вверх, была больше веса и силы тяжести.
Вертикальный спуск или падение вниз — требует выполнения полной противоположности подъему. Уменьшается тяга, чтобы сила была направлена вниз.
Направление пропеллеров — рыскание, тангаж, крен
Прежде чем углубиться в настройку двигателя и пропеллеров квадрокоптера, давайте немного объясним терминологию, используемую, когда он летит вперед, назад, вбок или вращается при зависании.
Рыскание (Yaw)— это вращение или поворот квадрокоптера вправо или влево. Это основное движение для вращения мультикоптера. На большинстве дронов это достигается с помощью левой ручки газа влево или вправо.
Тангаж (Pitch)— это движение квадрокоптера вперед или назад. Подача вперед обычно достигается нажатием ручки газа вперед, что заставляет квадрокоптер наклоняться и двигаться вперед от вас. Шаг назад достигается перемещением ручки газа назад.
Шаг назад достигается перемещением ручки газа назад.
Крен (Roll)— Большинство людей путают крен с рысканием. Крен заставляет квадрокоптер лететь вбок, влево или вправо. Он управляется правой ручкой газа, заставляя его летать слева направо.
Большинство высокотехнологичных дронов, таких как квадрокоптер Yuneec Q500 4k, позволяют управлять им двумя различными способами. Вы можете летать на дроне, как будто вы пилот и на самом деле в квадрокоптере. Вы управляете ручками по-разному относительно крена, в зависимости от того, приближается ли дрон к вам или улетает от вас.
Вот короткое видео, которое очень просто показывает вам, каковы движения крена, тангажа и рыскания.
Направление двигателя для рыскания
На квадрокоптере, таком как DJI Mavic Pro или последняя версия Mavic 2 Pro, рыскание управляется правой ручкой управления на пульте дистанционного радиоуправления. Перемещение джойстика влево или вправо приведет к повороту квадрокоптера влево или вправо.
Перемещение джойстика влево или вправо приведет к повороту квадрокоптера влево или вправо.
Движение на пульте передают сигналы на полетный контроллер, который отправляет данные на регуляторы скорости квадрокоптера, управляющие конфигурацией и скоростью каждого двигателя.
Чтобы увидеть, как это на самом деле работает, взгляните на диаграмму конфигурации пропеллеров выше. На схеме изображен квадрокоптер DJI Phantom 3, вид сверху с роторами, обозначенными от 1 до 4.На приведенной схеме, вы можете видеть конфигурацию двигателя квадрокоптера: 2-й и 4-й двигатели вращаются против часовой стрелки, а 1-й и 3-й вращаются по часовой стрелке. С двумя наборами двигателей квадрокоптера, настроенными на вращение в противоположных направлениях, суммарный угловой момент равен нулю.
Угловой момент является вращательным эквивалентом линейного импульса и рассчитывается путем умножения угловой скорости на момент инерции. Какой момент инерции? Это похоже на массу, но только он имеет дело с вращением. Угловой момент зависит от того, как быстро вращаются роторы.
Угловой момент зависит от того, как быстро вращаются роторы.
Концептуально момент инерции можно рассматривать как представление сопротивления объекта изменению угловой скорости.
Если на двигателях квадрокоптера крутящий момент отсутствует, то общий угловой момент должен оставаться постоянным, равным нулю. Чтобы понять угловое движение вышеуказанного квадрокоптера, представьте, что 2-й и 4-й ротор, имеют положительный угловой момент, а 1-й и 3-й имеют отрицательный угловой момент. Назначим каждому двигателю значение -4, +4, -4, +4, что в сумме равно нулю.
Чтобы повернуть дрон вправо, нужно уменьшить угловую скорость двигателя 1, чтобы иметь угловой момент -2 вместо -4. Если бы ничего не случилось, общий момент импульса квадрокоптера теперь был бы +2. Так вот, этого не может быть. Дрон теперь будет вращаться по часовой стрелке, так что его корпус имеет момент импульса -2.
Уменьшение вращения ротора 1 действительно привело к вращению дрона, но также вызывает проблему. Это также уменьшило тягу от двигателя 1. Теперь направленная вверх сила не равна силе гравитации, и квадрокоптер опускается.
Это также уменьшило тягу от двигателя 1. Теперь направленная вверх сила не равна силе гравитации, и квадрокоптер опускается.
Кроме того, тяга двигателя квадрокоптера не одинакова, поэтому квадрокоптер становится неуравновешенным. Квадрокоптер наклонится вниз в направлении двигателя 1.
Чтобы вращать дрон без создания вышеуказанных дисбалансов, необходимо уменьшить вращение двигателей 1 и 3 с увеличением вращения вращающихся роторов 2 и 4.
Угловой момент вращения роторов по-прежнему не равен нулю, поэтому корпус дрона должен вращаться. Однако общая сила остается равной силе гравитации, и дрон продолжает зависать. Поскольку нижние упорные роторы расположены по диагонали друг от друга, дрон может оставаться в равновесии.
Направление пропеллеров квадрокоптера для тангажа и крена
Поскольку большинство квадрокоптеров симметричны (например, DJI Phantom 4 Pro v2, Autel X-Star и Holy Stone HS 100 Drone), нет никакой разницы между движением вперед или назад. То же самое относится и к движению из стороны в сторону. Как лететь вперед также объясняет, как летать назад или вбок.
Как лететь вперед также объясняет, как летать назад или вбок.
Чтобы лететь вперед, необходимо увеличить число оборотов двигателя квадрокоптера (скорость вращения) роторов 3 и 4 (задние двигатели) и уменьшить частоту вращения роторов 1 и 2 (передние двигатели). Общая сила тяги останется равной весу, поэтому дрон останется на том же вертикальном уровне.
Кроме того, поскольку один из задних роторов вращается против часовой стрелки, а другой по часовой стрелке, увеличенное вращение этих двигателей будет по-прежнему создавать нулевой угловой момент. То же самое относится и к передним роторам, поэтому дрон не вращается.
Большая сила в задней части дрона означает, что он наклонится вперед. Теперь небольшое увеличение тяги для всех роторов приведет к созданию силы тяги, которая уравновешивает вес вместе с движением вперед.
Двигатели | Как летают вещи
Смитсоновский национальный музей авиации и космонавтики
Поиск
Три типа двигателей приводят в действие большинство летательных аппаратов
Поршневые двигатели, реактивные двигатели и ракетные двигатели основаны на одних и тех же основных принципах создания тяги.
- Двигатель смешивает топливо с кислородом или другим окислителем в камере сгорания.
- Смесь воспламеняется.
- Горящая смесь создает горячие расширяющиеся газы.
- Расширяющиеся газы либо непосредственно создают тягу (в реактивных и ракетных двигателях), либо используются для толкания поршня или привода турбины.
Три типа двигателей
Двигатели винтовых самолетов , реактивных лайнеров, космических челноков и даже двигателя вашего семейного автомобиля работают по одним и тем же основным принципам. Хотите испачкать руки? Загляните под капот и узнайте, как работают эти двигатели.
Как двигатели создают тягу?
Третий закон движения Ньютона часто приводится как объяснение возникновения тяги. Но это объясняет эффект тяги, а не причину тяги. Давление и напряжение сдвига — единственные два способа, которыми природа воздействует на объект аэродинамической силой. Давление является основным источником тяги, создаваемой воздушным винтом, реактивным двигателем или ракетным двигателем.
Поршневой двигатель не может создавать тягу сам по себе. Он обеспечивает питание вращающегося винта, который создает тягу за счет создания разницы давлений между передней и задней частями винта, что приводит к поступательной силе. Реактивные или ракетные двигатели создают тягу за счет увеличения давления внутри двигателя. Это повышенное давление в реактивном или ракетном двигателе создает большую силу в направлении вперед, чем в направлении назад.
Выхлопные газы, производимые винтом, реактивным двигателем или ракетой, в соответствии с третьим законом Ньютона испытывают силу, противоположную и равную тяге, и поэтому перемещаются в направлении, противоположном тяге двигателя. Следовательно, выхлоп — это эффект тяги.
Узнать больше
поршневой двигатель
Реактивный двигатель
Жидкотопливный двигатель
Двигатель Сатурн V F-1
Лилиенталь 1894 Планер
Q:
В чем разница между реактивным двигателем и ракетным двигателем?
A:
Реактивные двигатели и ракеты работают по одному принципу. Они создают тягу за счет внутренней разницы давлений и, как объясняется в третьем законе движения Ньютона, выбрасывают выхлопные газы в равном и противоположном направлении. Главный
… более
Они создают тягу за счет внутренней разницы давлений и, как объясняется в третьем законе движения Ньютона, выбрасывают выхлопные газы в равном и противоположном направлении. Главный
… более
Посмотреть все вопросы и ответы
Простая английская Википедия, бесплатная энциклопедия
Из простой английской Википедии, бесплатной энциклопедии.
Кривая тяги ракетного двигателя Estes A10-PT. Кривая тяги показывает, какую тягу (в ньютонах) двигатель производит с течением времени (в секундах). Здесь также содержится информация об импульсе, количестве топлива и удельном импульсе.
Тяга — сила или толчок. Когда система толкает или ускоряет массу в одном направлении, возникает такая же большая тяга (сила) в противоположном направлении. В математике и физике это описывается вторым и третьим законами Исаака Ньютона. Тяга используется для описания того, насколько сильно двигатель толкает. Его можно использовать для многих видов транспортных средств и двигателей, таких как ракеты, моторные лодки, пропеллеры и реактивные двигатели.
Тяга используется для описания того, насколько сильно двигатель толкает. Его можно использовать для многих видов транспортных средств и двигателей, таких как ракеты, моторные лодки, пропеллеры и реактивные двигатели.
Тяга измеряется в «фунтах тяги» в США и в ньютонах в метрической системе. 4,45 ньютона тяги равняется 1 фунту тяги. Фунт тяги – это то, сколько тяги потребуется, чтобы объект весом в один фунт оставался неподвижным против силы земного притяжения.
Очень часто возникает вопрос, как сравнить число тяги двигателя самолета с механической мощностью поршневого двигателя (тип двигателя в автомобилях и во многих самолетах с воздушными винтами). Трудно сравнивать эти два. Это потому, что они не измеряют одно и то же. Поршневой двигатель не движет самолет. Он просто крутит пропеллер, который двигает самолет. Из-за этого поршневые двигатели оцениваются по мощности, которую они отдают гребному винту.
Однако у реактивного двигателя нет воздушного винта — он толкает самолет, перемещая за собой горячий воздух.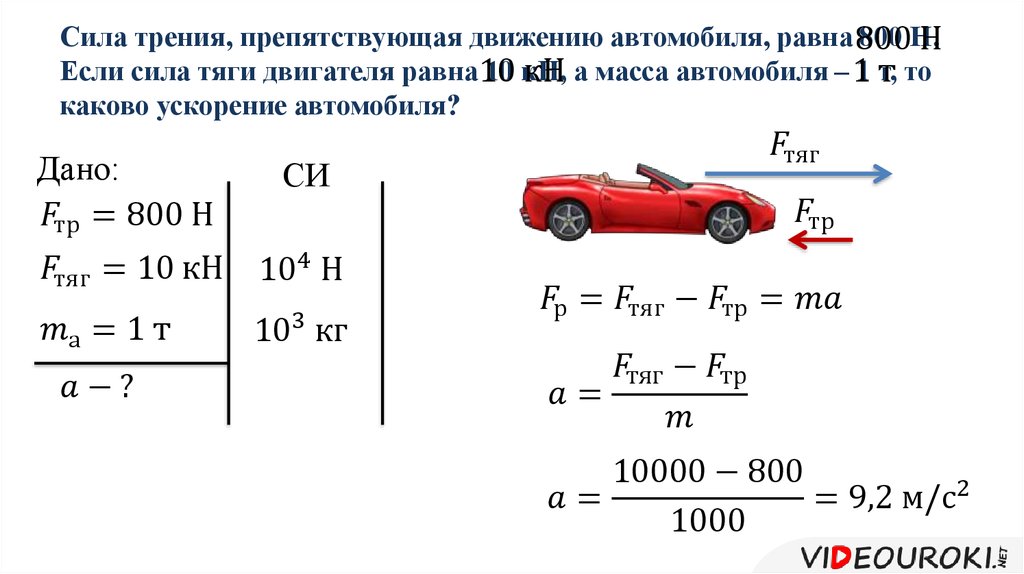
- P=Fdt{ \ displaystyle \ mathbf {P} = \ mathbf {F} {\ frac {d} {t}}},
Где P — мощность, F — сила, d — расстояние, t — время. Для ракетного или реактивного двигателя сила равна тяге, создаваемой двигателем. Расстояние, деленное на время, также называют скоростью. Таким образом, мощность равна тяге, умноженной на скорость [2]
- P = Tv {\ displaystyle \ mathbf {P} = \ mathbf {T} {v}},
Где T — тяга, а v это скорость. Это мощность, передаваемая двигателем при определенной тяге или скорости. 
Когда тягу ракеты или двигателя сравнивают с весом, это называется Тяговооружённость . Число, которое получается из этого сравнения, не имеет единиц, потому что это отношение. Соотношение в данном случае означает, что тяга двигателя (в ньютонах) делится на вес (в ньютонах). Цель этого сравнения — показать, насколько хорошо работает двигатель или транспортное средство, например, какое ускорение. Это число, которое можно использовать для сравнения различных типов двигателей, таких как авиадвигатели, реактивные двигатели, ракетные двигатели или автомобильные двигатели.
Этот сравнительный номер может изменяться во время работы двигателя. Это связано с тем, что вес двигателя уменьшается по мере использования топлива. Отношение тяги к весу используется для фактического сравнения двигателей — это число, найденное при первом запуске двигателя.
Тяга измеряется в «фунтах тяги» в США и в ньютонах в метрической системе. 4,45 ньютона тяги равняется 1 фунту тяги. Фунт тяги – это то, сколько тяги потребуется, чтобы объект весом в один фунт оставался неподвижным против силы земного притяжения.
Фунт тяги – это то, сколько тяги потребуется, чтобы объект весом в один фунт оставался неподвижным против силы земного притяжения.
Силы, воздействующие на аэродинамическое сечение
Самолет создает прямую тягу, когда воздух выталкивается в направлении, противоположном направлению полета. Тяга создается вращающимися лопастями винта. Тяга также может создаваться вращающимся вентилятором, выталкивающим воздух из задней части реактивного двигателя. Другой способ — выброс горячих газов из ракетного двигателя.
Обратная тяга противоположна прямой тяге. Таким образом, воздух толкается так же, как и движение тела. Обратная тяга может использоваться для облегчения торможения после приземления. Это можно сделать, перенаправив тягу турбовентиляторного или реактивного двигателя или изменив угол наклона лопастей винтового самолета.
Птицы обычно достигают тяги во время полета, взмахивая крыльями.
Лодка с мотором создает тягу или реверсивную тягу, когда гребные винты поворачиваются, толкая воду назад (или вперед). Создаваемая при этом тяга толкает лодку в направлении, противоположном движению воды.
Создаваемая при этом тяга толкает лодку в направлении, противоположном движению воды.
Ракету толкает вперед сила тяги, равная силе выхлопных газов, выходящих из сопла ракеты. Сила, создаваемая выхлопными газами, называется скоростью выхлопа. Скорость измеряется по сравнению с ракетой. Чтобы вертикальный пуск ракеты работал, стартовая тяга должна быть больше силы, чем вес ракеты.
