Что представляют собой данные лазерной съемки?—Справка
- Отражения лазерных импульсов лидара
- Атрибуты точек лидара
- Что такое облако точек?
Лидар (Lidar — Light Identification, Detection and Ranging) — это технология получения и обработки информации дистанционного зондирования с помощью активных оптических систем (лазеров), использующих, в том числе, явления отражения света от поверхности Земли с проведением высокоточных измерений X, Y, Z координат. Лидар, изначально использовался в приложениях воздушной лазерной съемки, является с экономической точки зрения прекрасной альтернативой традиционной съемке с использованием фотограмметрической обработки данных. Данные лидарной съемки представляют собой наборов данных, содержащих облака точек, которые могут управляться, отображаться, анализироваться и совместно использоваться с помощью ArcGIS.
Основными компонентами аппаратного обеспечения лидара являются: транспортное средство или устройство (самолет, вертолет, штатив), система лазерного сканирования, GPS (Глобальная система позиционирования) и INS (Внутренняя система позиционирования).
Лидар — это активный оптический сенсор, испускающий лазерные лучи в сторону цели во время движения транспортного средства по специальным съемочным маршрутам. Отражение лазера от объекта принимается и анализируется сенсором. Приемники записывают точное время, прошедшее с момента испускания лазерного импульса системой до момента его возвращения, для того чтобы вычислить расстояние между сенсором и целью. Совместно с информацией о внутреннем и внешнем позиционировании (GPS и INS), эти расстояния преобразуются в трехмерные точки, отображающие поверхность отражения лазерных импульсов.
Точечные данные подвергаются последующей обработке после сбора с учетом диапазона времени работы лазера, угла сканирования, координат GPS, информации о внутреннем позиционировании (INS), что позволяет получить точные координаты x,y,z.
Отражения лазерных импульсов лидара
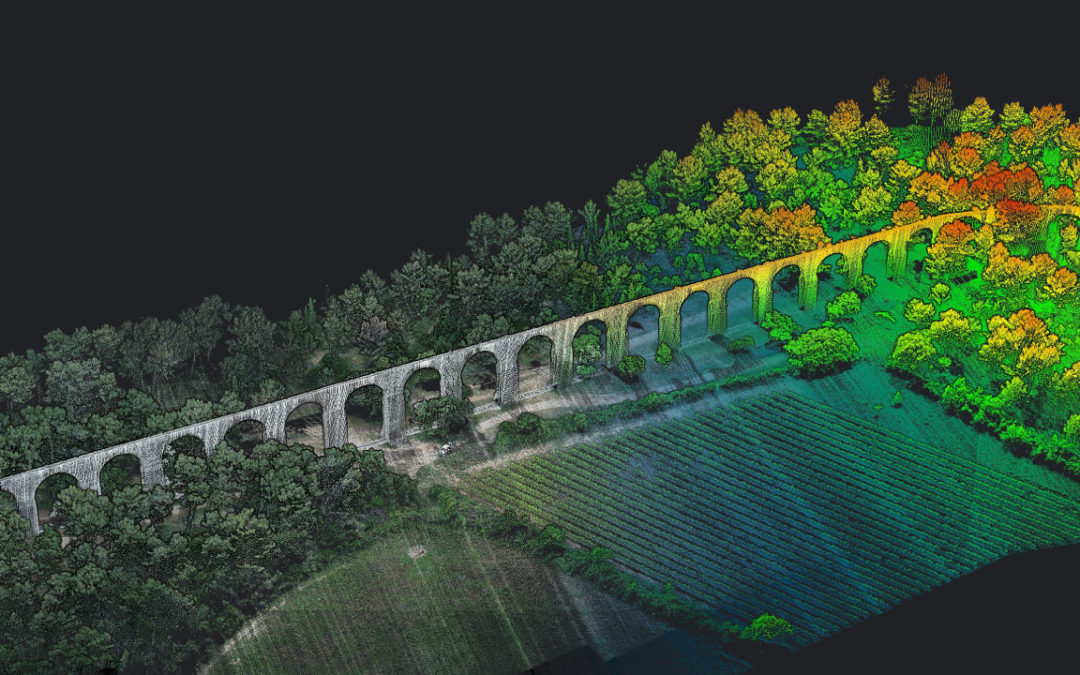
Лазерные импульсы, испускаемые лидаром, отражаются как от находящихся на поверхности земли, так и от находящихся над землей объектов: от растительного покрова, строений, мостов и т.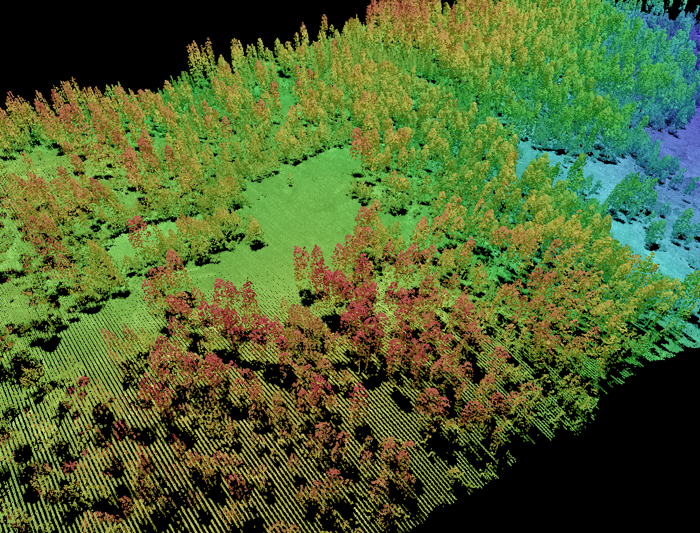 д. Один лазерный импульс может отражаться и возвращаться к сенсору как один раз, так и несколько. Любой лазерный импульс претерпевает несколько отражений при его движении к земной поверхности, разделяясь на столько частей, от какого количества поверхностей он отразился.
д. Один лазерный импульс может отражаться и возвращаться к сенсору как один раз, так и несколько. Любой лазерный импульс претерпевает несколько отражений при его движении к земной поверхности, разделяясь на столько частей, от какого количества поверхностей он отразился.
Первый возвращенный сигнал является наиболее показательным и будет соответствовать самому высокому объекту ландшафта, такому как, например, верхушка дерева либо крыша здания. Первый отраженный сигнал может также соответствовать и земной поверхности. В этом случае лидаром будет захвачено только одно отражение.
Большое количество возвратов используется для получения высот нескольких объектов, находящихся на пути лазерного импульса. Отраженные сигналы из середины «спектра» обычно соответствуют растительности, а последние отраженные сигналы используются для моделей собственно поверхности земли.
Последнее отражение, однако, не всегда будет соответствовать земле. К примеру, рассмотрим случай, когда импульс попадает в толстую ветку и не достигает земной поверхности. В этом случае последнее отражение произошло не от земли, а от ветки.
В этом случае последнее отражение произошло не от земли, а от ветки.
Атрибуты точек лидара
Помимо позиционных значений x, y и z системой сохраняется также дополнительная информация. Для каждого лазерного импульса записываются и сохраняются следующие атрибуты: интенсивность, номер отражения, количество отраженных сигналов, значения классификации точки, крайние точки линии полета, значения RGB, время GPS, угол и направление сканирования. В следующей таблице описаны атрибуты, которые можно получить для каждой точки.
Примечание:
Перечисленные ниже атрибуты лидара не всегда сохраняются в итоговых выходных файлах. Используйте Набор данных LAS (LAS dataset) для просмотра атрибутов и классификации лидарных данных.
| Атрибут лидара | Описание |
|---|---|
Интенсивность | Сила отражения лазерного импульса, соответствующего лидарной точке. |
Номер отраженного сигнала | Испускаемый лазерный импульс может создать до пяти отраженных сигналов в зависимости от объектов, от которых он отражается и возможностей лазерного сканера. Первый возвращенный импульс будет помечен как отраженный сигнал номер один, второй — как номер два и т.д. |
Количество отраженных сигналов | Количество возвращенных сигналов — это общее число отражений данного импульса. К примеру, точка лазерных данных может быть вторым отраженным сигналом из пяти отражений. |
Классификация точек | Каждая в дальнейшем обработанная точка лидара может содержать значение классификации, которое определяет тип объекта, отразившего лазерный импульс. Лидарные точки могут быть классифицированы на несколько категорий, таких, в том числе, как поверхность земли, верхняя граница купола леса и водная поверхность. |
Ребро линии полета | Точки отображаются в зависимости от значения, которое равно 0 либо 1. Точки, находящиеся на линии полета, имеют значение, равное 1, остальные — равное 0. |
RGB | Данным лидара может быть присвоен атрибут RGB. Эта атрибутивная информация часто берется из изображений, которые получаются одновременно с лазерной съемкой. |
GPS-время | Время GPS, соответствующее моменту испускания импульса. Значение времени соответствует числу прошедших секунд в неделе. |
Угол сканирования | Угол сканирования — это значение в градусах из диапазона от -90 до +90. При 0 градусов лазерный импульс испускается перпендикулярно и осуществляется съемка в надир. |
Направление сканирования | Направление сканирования — это направление движения зеркала сканирующей системы в момент испускания системой лазерного сигнала. Значение, равное 1, соответствует положительному направлению сканирования, а равное 0 — отрицательному. Положительное направление означает, что сканер двигается слева направо по направлению полета, а отрицательное — наоборот. |

 Классам присваиваются целочисленные значения кодов, хранящиеся в файлах LAS.
Классам присваиваются целочисленные значения кодов, хранящиеся в файлах LAS. При значении, равном -90 градусов, лазер испускает импульсы влево, а при +90 — вправо от самолета в направлении полета. Большинство систем лазерного сканирования работают в диапазоне от -30 до +30 градусов.
При значении, равном -90 градусов, лазер испускает импульсы влево, а при +90 — вправо от самолета в направлении полета. Большинство систем лазерного сканирования работают в диапазоне от -30 до +30 градусов.Что такое облако точек?
Обработанные в дальнейшем пространственно организованные данные лазерной съемки называют облаком точек. Исходные облака точек — это огромные наборы высотных 3D точек, имеющих значения x, y, z, а также дополнительную атрибутику, например, время GPS. Конкретные поверхности, отразившие сигнал, классифицируются после начальной обработки облака точек. Высоты земной поверхности, строений, покрова леса, путепроводов и других объектов, с которыми сталкивается лазерный луч, составляют данные облака точек.
Высоты земной поверхности, строений, покрова леса, путепроводов и других объектов, с которыми сталкивается лазерный луч, составляют данные облака точек.
Для получения более подробной информации см. раздел Классификация лидарных точек.
Облака точек лидара в ArcGIS чаще всего представляют собой набор растров или поверхностей TIN, Набор данных LAS, Набор данных представления поверхностей (terrain) или Набор данных мозаики.
Связанные разделы
Как работает беспилотный 3D LiDAR мэппинг? — Ресурсы и знания
Как LiDARработает?
Что это за лазерная технология, делающая возможным картирование через растительность,
в условиях низкой контрастности или тени?
7 августа 2018 года
Обнаружение и звонок света
Light Detection And Ranging (LiDAR) — это технология дистанционного зондирования на основе лазера. Идея LiDAR довольно проста: направьте небольшой лазер на поверхность и измерьте время, которое требуется лазеру, чтобы вернуться к источнику.
Эта технология используется в географических информационных системах (ГИС) для создания цифровой модели рельефа (ЦМР) или цифровой модели рельефа (ЦМР) для трехмерного картирования.
LiDAR принцип действия
- излучение лазерного импульса
- Запись отражённого сигнала
- Измерение расстояния (время движения х скорость света).
- Получение высоты и положения в плоскости
- Вычисление точного положения эха
LiDAR для беспилотников идеально сочетается с:
- Small areas to fly over (<10 sq. km or 100 km linear)
- Картирование под растительностью
- труднодоступные зоны
- Данные, необходимые в режиме реального времени или часто
- Требуемый диапазон точности от 2,5 до 10 cm
Как это LiDARработает?
Возможно, вы уже слышали о LiDAR но понятия не имею об этой технологии. Вы узнаете, в чем заключаются основные принципы. LiDAR. Вы также откроете для себя несколько приложений для трехмерной лазерной картографии с помощью беспилотных летательных аппаратов (также известных как БПЛА, UAS или беспилотные летательные аппараты).
Вы также откроете для себя несколько приложений для трехмерной лазерной картографии с помощью беспилотных летательных аппаратов (также известных как БПЛА, UAS или беспилотные летательные аппараты).
1. Понимание того, как работает LiDAR
Light Detection and Ranging (LiDAR) — это технология, похожая на радар, использующая лазер вместо радиоволн.
LiDAR Принцип довольно легко понять:
- он излучает лазерный импульс на поверхность
- улавливает отраженный лазер обратно к источнику LiDARимпульса с помощью датчиков
- измеряет время прохождения лазера
- вычисляет расстояние от источника по формуле «Расстояние = (Скорость света х Прошедшее время) / 2
Этот процесс повторяется LiDARприборами миллион раз и в результате получается сложная карта обследованного района, известная как трехмерное облако точек.
2. Понимание того, как построена система LiDAR
Оборудование, необходимое для измерения миллиона расстояний от датчиков до точек поверхности, — это системаLiDAR .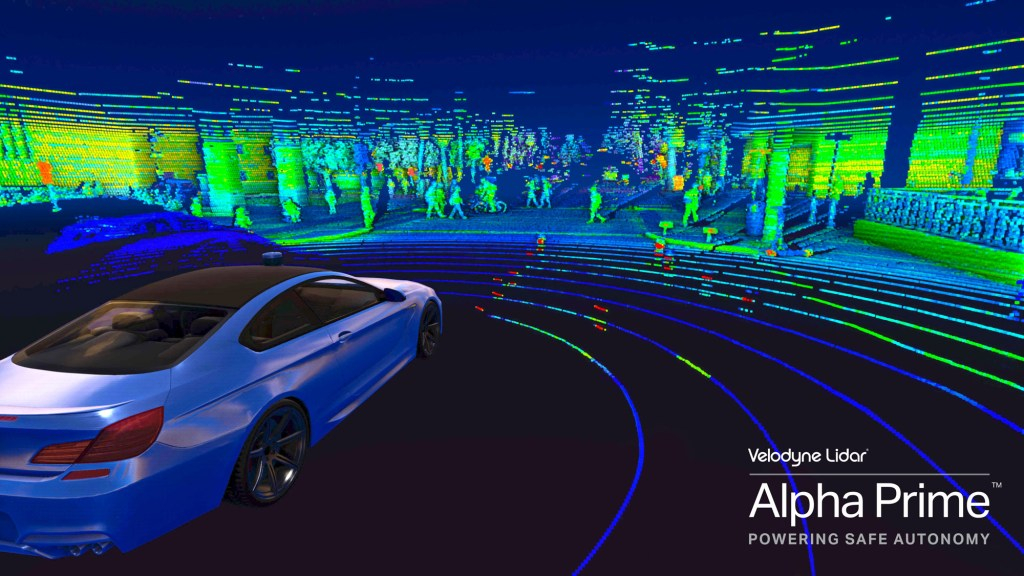 Эта передовая технология работает очень быстро, поскольку она способна вычислять расстояние между датчиками LiDAR и целью (напомним, что скорость света составляет 300 000 километров в секунду). Системы LiDAR включают в себя 3 основных компонента, независимо от того, установлены ли они на автомобилях, самолетах или БПЛА:
Эта передовая технология работает очень быстро, поскольку она способна вычислять расстояние между датчиками LiDAR и целью (напомним, что скорость света составляет 300 000 километров в секунду). Системы LiDAR включают в себя 3 основных компонента, независимо от того, установлены ли они на автомобилях, самолетах или БПЛА:
1. Лазерный сканер
LiDAR Системы лазерного сканирования излучают лазерный свет из различных мобильных систем (автомобили, самолеты, беспилотники…) через воздух и растительность (воздушный лазер) и даже воду (батиметрический лазер). Сканер принимает свет обратно (эхо-сигналы), измеряя расстояния и углы. Скорость сканирования влияет на количество точек и эхосигналов, измеряемых системой LiDAR . Выбор оптики и сканера в значительной степени влияет на разрешение и диапазон, в котором вы можете работать с системой LiDAR .
2. Системы навигации и позиционирования
Независимо от того, установлен ли датчик LiDAR на самолете, автомобиле или UAS (беспилотных воздушных системах), крайне важно определить абсолютное положение и ориентацию датчика, чтобы убедиться, что полученные данные пригодны для использования. Глобальные навигационные спутниковые системы (GNSS) предоставляют точную географическую информацию о положении датчика (широта, долгота, высота), а инерциальный измерительный блок (IMU) определяет в этом месте точную ориентацию датчика (тангаж, крен, рыскание). Данные, записанные этими двумя устройствами, затем используются для генерации данных в статические точки — основу облака точек 3D-картографии.
Глобальные навигационные спутниковые системы (GNSS) предоставляют точную географическую информацию о положении датчика (широта, долгота, высота), а инерциальный измерительный блок (IMU) определяет в этом месте точную ориентацию датчика (тангаж, крен, рыскание). Данные, записанные этими двумя устройствами, затем используются для генерации данных в статические точки — основу облака точек 3D-картографии.
3. Вычислительная технология
Для того чтобы максимально использовать данные : вычисления необходимы для работы системы LiDAR путем определения точного положения эхо-сигнала. Они также необходимы для визуализации данных в полете или их постобработки для повышения точности и достоверности облака точек трехмерного картирования.
3. Определение соответствия между потребностями вашего проекта и спецификациями LiDAR .
Лазерный сканер: Какой уровень точности, уровень точности, плотность точек, диапазон, прокосы, которые соответствуют вашим потребностям проекта?
GNSS: совместима ли используемая опорная станция GNSS (наземная) + приемник GNSS (подвижная) с используемыми GNSS (GPS, GLONASS, BEiDOU или Galileo) ? Нужна ли мне наземная станция или нет?
Батарейки: Батареи внутренние или внешние ? Какая автономия требуется для покрытия поверхности, которую вы хотите отобразить на карте?
Монтаж: Можно ли легко установить LiDARсистему на используемую вами антенную (самолет, беспилотник) или автомобильную (автомобиль) платформу?
Файл данных: Каков формат файла сгенерированных данных ?
Постобработка данных: Как легко использовать данные и доставить лучшее 3D облако точек отображения для вашего конечного клиента? Классификация, окраска, генерация DTM, orl ? Что делать с постобработанными данными ?
4.
 Открытие приложений для беспилотных летательных аппаратов LiDAR
Открытие приложений для беспилотных летательных аппаратов LiDARКоммунальное хозяйство: обследование линий электропередач для выявления проблем с провисанием линий или планирования работ по обрезке деревьев
Горное дело: расчет поверхности/объема для оптимизации работы шахты (отвал, выемка) или принятия решения о расширении шахты
Гражданское строительство: картографирование для выравнивания, планирования и оптимизации инфраструктуры (дороги, железные дороги, мосты, трубопроводы, поля для гольфа) или реконструкции после стихийных бедствий, исследование эрозии пляжей для создания плана действий в чрезвычайных ситуациях
Археология: картографирование через полог леса для ускорения открытий
Лесное хозяйство: картографирование лесов для оптимизации деятельности или помощи в подсчете деревьев
Экологические исследования: измерение скорости роста, распространение болезней
5.
 Открытие беспилотного летательного аппарата для картографирования LiDAR
Открытие беспилотного летательного аппарата для картографирования LiDARУзнайте больше о БПЛА DJI для картографирования LiDAR например, DJI M600 или DJI M300.
Выбрать подходящий БПЛА для ваших следующих съемок LiDAR не так-то просто. Подробнее о
Узнайте, что делает хороший Интеграция БПЛА LiDAR .
Последние знания
Что нового в ЙеллоуСкане
9 ноября 2022 г.|
В чем заключалась задача? Целью данного проекта было создание модели пеллетного завода Huasco в Чили, принадлежащего государственной компании…
12 октября 2022 |
Этот проект LiDAR , возглавляемый нашим клиентом Ventus-Tech, был направлен на определение исходных данных и регистрацию состояния Цепного моста в Будапеште.
27 июля 2022 |
Узнайте, как система YellowScan Mapper LiDAR была использована в Антарктиде для изучения пространственного распределения пингвинов в их среде обитания.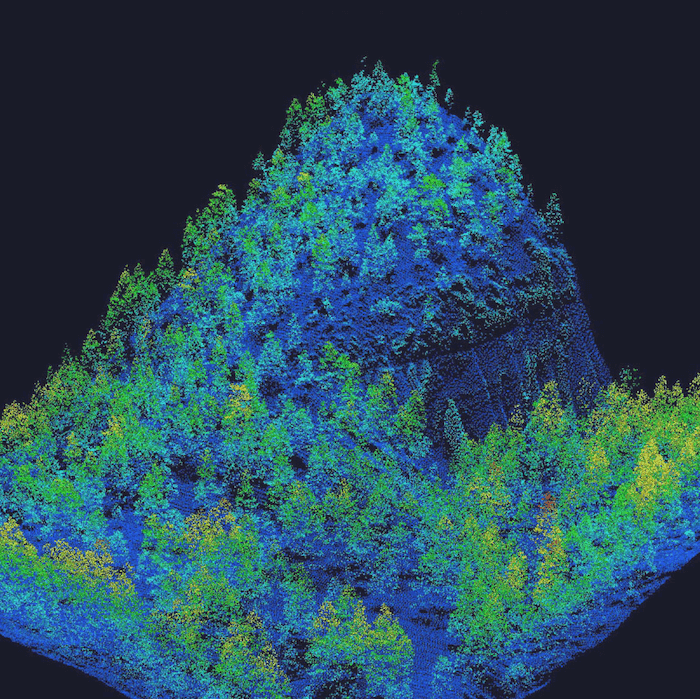
ОТКРЫТЬ БОЛЬШЕ РЕСУРСОВ
Лидар — один из самых крутых трюков с iPhone и iPad Pro: вот что еще он может сделать
Apple настроена оптимистично на лидар, технологию, которая используется в iPhone 12 Pro и iPhone 13 Pro, а также в моделях Apple iPad Pro с 2020 года. Присмотритесь внимательно на массивах задних камер на этих устройствах, и вы увидите маленькую черную точку возле объективов камеры, примерно такого же размера, как вспышка. Это датчик лидара, и он обеспечивает новый тип определения глубины, который может иметь значение для фотографий, AR, 3D-сканирования и, возможно, даже больше.
Подробнее: Лидарная технология iPhone 12 не только улучшает качество фотографий. Попробуйте этот крутой трюк для вечеринок
Если Apple добьется своего, лидар — это термин, который вы будете слышать постоянно. Это уже фактор в гарнитурах дополненной реальности и в автомобилях. Тебе это надо? Возможно, нет. Давайте разберем, что мы знаем, для чего Apple использует это и куда эта технология может пойти дальше.
Просто экспериментирую с iPhone 12 Pro и 3D-копиями pic.twitter.com/0LiwaomYhb
— Скотт Стейн (@jetscott) 22 октября 2020 г.
Что означает лидар?
Лидар означает обнаружение света и определение дальности, и он существует уже некоторое время. Он использует лазеры, чтобы отмечать объекты и возвращаться к источнику лазера, измеряя расстояние, измеряя время перемещения или полета светового импульса.
Пробую некоторые приложения AR с поддержкой LiDAR, которые я могу найти для iPad Pro 2020 года, чтобы показать сетку. Вот один из них под названием Primer, ранняя сборка для тестирования обоев на стенах pic.twitter.com/SatibguyTm
— Скотт Стейн (@jetscott) 14 апреля 2020 г.
Как работает лидар для определения глубины?
Лидар — тип времяпролетной камеры. Некоторые другие смартфоны измеряют глубину одним световым импульсом, в то время как смартфон с технологией лидара такого типа посылает волны световых импульсов в виде брызг инфракрасных точек и может измерять каждую из них своим датчиком, создавая поле точек, отображающих расстояния. и может «связывать» размеры пространства и объекты в нем. Световые импульсы невидимы для человеческого глаза, но их можно увидеть с помощью камеры ночного видения.
Некоторые другие смартфоны измеряют глубину одним световым импульсом, в то время как смартфон с технологией лидара такого типа посылает волны световых импульсов в виде брызг инфракрасных точек и может измерять каждую из них своим датчиком, создавая поле точек, отображающих расстояния. и может «связывать» размеры пространства и объекты в нем. Световые импульсы невидимы для человеческого глаза, но их можно увидеть с помощью камеры ночного видения.
Разве это не похоже на Face ID на iPhone?
Есть, но с большей дальностью. Идея та же: камера Apple TrueDepth с поддержкой Face ID также излучает массив инфракрасных лазеров, но может работать только на расстоянии нескольких футов. Задние лидарные датчики на iPad Pro и iPhone 12 Pro работают на расстоянии до 5 метров.
pic.twitter.com/TEJTzEN0u2
— Скотт Стейн (@jetscott) 22 октября 2020 г.
Лидар уже используется во многих других технологиях
Лидар — это технология, которая распространяется повсюду. Он используется для самоуправляемых автомобилей или вспомогательного вождения. Он используется для робототехники и дронов. Гарнитуры дополненной реальности, такие как HoloLens 2, имеют аналогичную технологию, отображая пространство комнаты перед размещением в них трехмерных виртуальных объектов. Есть даже шлем виртуальной реальности с лидаром. Но у него тоже довольно длинная история.
Он используется для самоуправляемых автомобилей или вспомогательного вождения. Он используется для робототехники и дронов. Гарнитуры дополненной реальности, такие как HoloLens 2, имеют аналогичную технологию, отображая пространство комнаты перед размещением в них трехмерных виртуальных объектов. Есть даже шлем виртуальной реальности с лидаром. Но у него тоже довольно длинная история.
Старый аксессуар Microsoft для Xbox с датчиком глубины, Kinect, был камерой с инфракрасным сканированием глубины. На самом деле PrimeSense, компания, которая помогла создать технологию Kinect, была приобретена Apple в 2013 году. Теперь у нас есть датчики TrueDepth для сканирования лица Apple и датчики задней лидарной камеры.
Камеры iPhone 12 Pro и 13 Pro лучше работают с лидаром
Времяпролетные камеры на смартфонах, как правило, используются для повышения точности и скорости фокусировки, и iPhone 12 Pro сделал то же самое. Apple обещает лучшую фокусировку при слабом освещении, до шести раз быстрее в условиях слабого освещения.
Улучшенная фокусировка — это плюс, и есть вероятность, что iPhone 12 Pro также сможет добавлять к изображениям больше данных 3D-фотографий. Хотя этот элемент еще не реализован, фронтальная камера Apple TrueDepth с определением глубины используется аналогичным образом с приложениями, и сторонние разработчики могут погрузиться в нее и развить некоторые дикие идеи. Это уже происходит.
pic.twitter.com/rBfzWz8Gne
— Скотт Стейн (@jetscott) 22 октября 2020 г.
Он также значительно улучшает дополненную реальность.
Лидар позволяет iPhone и iPad Pro намного быстрее запускать приложения дополненной реальности и создавать быструю карту комнаты, чтобы добавить больше деталей. Многие основные технологии дополненной реальности Apple используют преимущества лидара, чтобы скрывать виртуальные объекты за реальными (так называемая окклюзия) и размещать виртуальные объекты в более сложных сопоставлениях помещений, например, на столе или стуле.
Многие основные технологии дополненной реальности Apple используют преимущества лидара, чтобы скрывать виртуальные объекты за реальными (так называемая окклюзия) и размещать виртуальные объекты в более сложных сопоставлениях помещений, например, на столе или стуле.
Я тестировал его в игре Hot Lava для Apple Arcade, в которой уже используется лидар для сканирования комнаты и всех ее препятствий. Я мог размещать виртуальные объекты на лестнице и прятать вещи за реальными объектами в комнате. Ожидайте гораздо больше приложений AR, которые начнут добавлять поддержку лидара, подобную этой, для более богатых возможностей.
Следующая волна линз Snapchat начнет использовать определение глубины с помощью лидара iPhone 12 Pro.
Снапчат Но помимо этого есть дополнительный потенциал благодаря более длинному хвосту. Многие компании мечтают о гарнитурах, которые будут сочетать виртуальные объекты с реальными: очки дополненной реальности, над которыми работают Facebook, Qualcomm, Snapchat, Microsoft, Magic Leap и, скорее всего, Apple и другие, будут полагаться на наличие продвинутых 3D-карт мира для слой виртуальных объектов.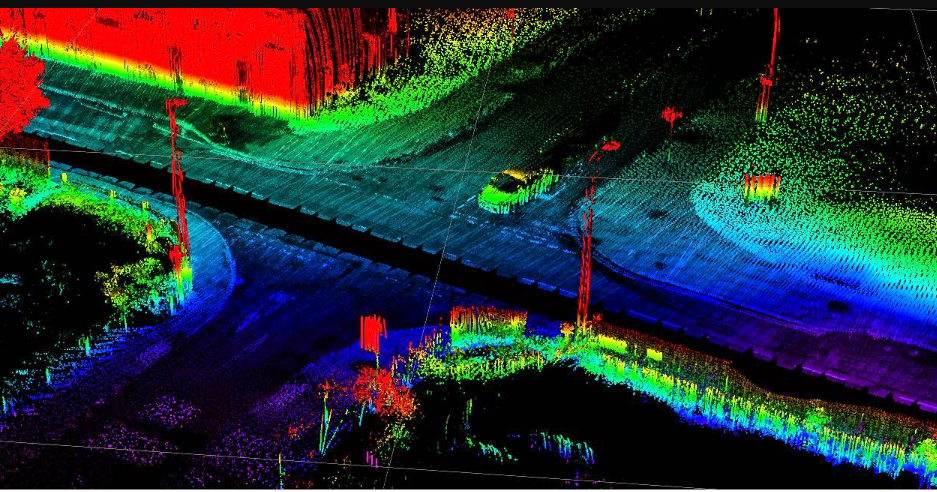
Эти 3D-карты сейчас создаются с помощью специальных сканеров и оборудования, почти как сканирующая мир версия автомобилей Google Maps. Но есть вероятность, что собственные устройства людей могут в конечном итоге помочь собрать эту информацию или добавить дополнительные оперативные данные. Опять же, гарнитуры дополненной реальности, такие как Magic Leap и HoloLens, уже предварительно сканируют вашу среду, прежде чем добавлять в нее элементы, и технология дополненной реальности Apple, оснащенная лидаром, работает точно так же. В этом смысле iPhone 12 и 13 Pro и iPad Pro похожи на гарнитуры AR без части гарнитуры… и могут проложить путь для первой гарнитуры VR/AR от Apple, ожидаемой либо в этом, либо в следующем. В качестве примера того, как это будет работать, посмотрите на высококачественную гарнитуру Varjo XR-3, которая использует лидар для смешанной реальности.
Трехмерное сканирование комнаты из приложения Occipital Canvas, полученное с помощью лидара с определением глубины на iPad Pro. Ожидайте того же от iPhone 12 Pro, а может быть, и большего.
Ожидайте того же от iPhone 12 Pro, а может быть, и большего.
3D-сканирование может стать убийственным приложением
Лидар можно использовать для создания сетки 3D-объектов и комнат, а также для наложения фотоизображений поверх них. Этот метод называется фотограмметрией. Это может быть следующая волна технологий захвата для практического использования, например, для улучшения дома или даже для социальных сетей и журналистики. Возможность захвата 3D-данных и обмена этой информацией с другими может сделать эти телефоны и планшеты с лидаром инструментами захвата 3D-контента. Лидар также можно использовать без элемента камеры для измерения объектов и пространств.
Я уже опробовал несколько первых приложений для 3D-сканирования с лидаром на iPhone 12 Pro с переменным успехом (приложение 3D-сканер, Lidar-сканер и Record3D), но их можно использовать для сканирования объектов или картирования комнат с удивительной скоростью. . 16-футового эффективного диапазона сканирования лидара достаточно, чтобы охватить большинство комнат в моем доме, но на больших открытых площадках требуется больше перемещений. Опять же, фронтальная камера Apple TrueDepth уже делает то же самое с близкого расстояния. Со временем будет интересно посмотреть, включит ли Apple функции 3D-сканирования в свои собственные приложения для камер, сделав эту технологию более приоритетной. На данный момент 3D-сканирование становится лучше, но для большинства людей оно остается более нишевой функцией.
. 16-футового эффективного диапазона сканирования лидара достаточно, чтобы охватить большинство комнат в моем доме, но на больших открытых площадках требуется больше перемещений. Опять же, фронтальная камера Apple TrueDepth уже делает то же самое с близкого расстояния. Со временем будет интересно посмотреть, включит ли Apple функции 3D-сканирования в свои собственные приложения для камер, сделав эту технологию более приоритетной. На данный момент 3D-сканирование становится лучше, но для большинства людей оно остается более нишевой функцией.
Сейчас играет: Смотри: Наш подробный обзор iPhone 12 и 12 Pro
13:48
Apple не первая, кто исследует подобные технологии на телефоне
У Google была такая же идея, когда создавался Project Tango — ранняя платформа AR, которая была только на двух телефонах. Усовершенствованный массив камер также имел инфракрасные датчики и мог отображать комнаты, создавая 3D-сканы и карты глубины для AR и для измерения внутренних пространств. Телефоны Google, оснащенные Tango, просуществовали недолго, их заменили алгоритмы компьютерного зрения, которые выполняли оценку глубины на камерах, не нуждаясь в том же оборудовании. Однако на этот раз лидар уже находит применение в автомобилях, гарнитурах дополненной реальности, робототехнике и многом другом.
Телефоны Google, оснащенные Tango, просуществовали недолго, их заменили алгоритмы компьютерного зрения, которые выполняли оценку глубины на камерах, не нуждаясь в том же оборудовании. Однако на этот раз лидар уже находит применение в автомобилях, гарнитурах дополненной реальности, робототехнике и многом другом.
Полное руководство по LiDAR: обнаружение света и определение дальности
Что такое обнаружение света и определение дальности (LiDAR)?
Как бы вы хотели взмахнуть своей волшебной палочкой и вдруг узнать, как далеко все от вас?
Волшебные палочки не нужны. Так работает LiDAR (Light Detection and Ranging). Конечно, без волшебной палочки!
Давайте демистифицируем обнаружение света и определение дальности. Надеюсь, прочитав это, вы пройдёте путь от нуля до героя LiDAR.
ПОДРОБНЕЕ : 6 лучших бесплатных источников данных LiDAR
LiDAR 101
LiDAR по своей сути является дистанционной технологией . С самолета или вертолета системы LiDAR посылают свет на землю.
С самолета или вертолета системы LiDAR посылают свет на землю.
Этот импульс достигает земли и возвращается к датчику. Затем он измеряет, сколько времени требуется, чтобы свет вернулся к датчику.
Записывая время возвращения, LiDAR измеряет расстояние. Фактически, именно так LiDAR и получил свое название — Light Detection and Ranging.
Как работает LiDAR
LiDAR — это инструмент для отбора проб. Я имею в виду, что он отправляет более 160 000 импульсов в секунду. Каждую секунду на каждый 1-метровый пиксель приходится около 15 импульсов. Вот почему облака точек LiDAR создают миллионы точек.
Системы LiDAR очень точны, потому что они контролируются на платформе. Например, точность составляет всего около 15 см по вертикали и 40 см по горизонтали.
Когда самолет летит по воздуху, устройства LiDAR сканируют землю из стороны в сторону. В то время как некоторые импульсы будут проходить непосредственно под надиром, большинство импульсов распространяются под углом (вне надира). Поэтому, когда система LiDAR вычисляет высоту, она также учитывает угол.
Поэтому, когда система LiDAR вычисляет высоту, она также учитывает угол.
Как правило, линейный LiDAR имеет ширину захвата 3300 футов. Но новые технологии, такие как Geiger LiDAR, могут сканировать ширину 16 000 футов. Этот тип LiDAR может охватывать гораздо более широкие зоны охвата по сравнению с традиционным LiDAR.
Что может генерировать LiDAR?
1. Количество возвратов
Представьте, что вы идете в лес. Затем вы смотрите на небо. Если вы видите свет, это означает, что импульсы LiDAR тоже могут проходить. Также это означает, что LiDAR может поразить голую землю или короткую растительность.
Значительное количество света проникает в полог леса так же, как солнечный свет. Но LiDAR не обязательно попадет только на голую землю. В лесистой местности он может отражаться от разных частей леса, пока импульс, наконец, не достигнет земли.
Используя LiDAR для получения точек на поверхности земли, вы не просвечиваете сквозь растительность. Вместо этого вы действительно вглядываетесь в щели между листьями. Когда он попадает в ветки, вы получаете несколько попаданий или возвратов.
Когда он попадает в ветки, вы получаете несколько попаданий или возвратов.
2. Номер возврата
В лесу лазерный импульс направлен вниз. Когда свет падает на разные части леса, вы получаете «обратное число». Например, вы будете получать 1-й, 2-й, 3-й возврат, пока он, наконец, не упадет на голую землю. Если на пути нет леса, он просто ударится о поверхность земли.
Иногда импульс света не отражается ни от чего. Как и в случае с деревьями, один световой импульс может иметь несколько возвратов. Системы LiDAR могут записывать информацию, начиная с верхней части навеса через навес до земли. Это делает LiDAR ценным инструментом для интерпретации структуры леса и формы деревьев.
3. Цифровые модели рельефа
Цифровые модели рельефа (ЦМР) — это поверхностные (топографические) модели земной поверхности. Используя только отражения от земли, вы можете построить ЦМР. Но это отличается от цифровых моделей местности (DTM), потому что DTM включают в себя контуры.
С помощью ЦМР можно создавать дополнительные продукты. Например, вы можете создать:
- Наклон (увеличение или падение, выраженное в градусах или процентах)
- Экспозиция (направление наклона)
- Отмывка (заштрихованный рельеф с учетом угла освещения)
ПОДРОБНЕЕ : Бесплатные глобальные источники данных ЦМР.
4. Цифровые модели поверхности
Как вы уже знаете, LiDAR смотрит сквозь лес. В конце концов, свет достигает земли. Затем мы получаем возвращение с голой Земли. Но как насчет первого возвращения, которое попадает в дерево?
Цифровая модель поверхности (DSM) включает отметки естественных и искусственных поверхностей. Например, он добавляет высоту от зданий, крон деревьев, линий электропередач и других объектов.
5. Модель высоты навеса
Модели высоты навеса (CHM) дают вам реальную высоту топографических объектов на земле. Мы также называем этот тип модели высот нормализованной цифровой моделью поверхности (nDSM).
Во-первых, возьмите DSM, который включает в себя естественные и искусственные объекты, такие как деревья и здания. Затем вычтите эти высоты из голой Земли (ЦМР). Когда вы вычитаете два, вы получаете поверхность объектов, которая представляет реальную высоту от земли.
6. Интенсивность света
Сила возвратных сигналов LiDAR зависит от состава наземного объекта, отражающего возврат. Отражающие проценты называются интенсивностью LiDAR.
Но на интенсивность света влияют несколько факторов. Например, дальность, угол падения, луч, приемник и состав поверхности (особенно) влияют на интенсивность света. Например, когда импульс отклоняется дальше, обратная энергия уменьшается.
Интенсивность света особенно полезна для различения особенностей землепользования/покрова. Например, непроницаемые поверхности выделяются на изображениях с интенсивностью света. Вот почему интенсивность света хороша для классификации изображений, такой как анализ изображений на основе объектов.![]()
7. Классификация точек
Существует набор кодов классификации, которые Американское общество фотограмметрии и дистанционного зондирования (ASPRS) присваивает для классификации точек LiDAR.
Например, классы могут включать землю, растительность (низкую, среднюю и высокую), здания и воду и т. д. Иногда классификация точек может относиться к нескольким категориям. В этом случае поставщики обычно помечают эти точки вторичными классами.
Поставщики могут или не могут классифицировать LiDAR. Коды генерируются отраженным лазерным импульсом в полуавтоматическом режиме. Не все поставщики добавляют это поле классификации LAS. На самом деле, это обычно оговаривается в договоре заранее.
Где открытые и бесплатные источники LiDAR?
Данные LiDAR — редкий и ценный ресурс. Но благодаря программам открытых данных они становятся все более доступными.
Так где же данные лидара? Вот список из 6 лучших бесплатных источников данных LiDAR, которые помогут вам начать поиск.
Если вы не можете найти то, что ищете, то, скорее всего, вам придется приобрести данные LiDAR. Продавцы обычно используют LiDAR в коммерческих целях на вертолетах, самолетах и дронах.
Какие существуют типы LiDAR?
Давайте рассмотрим типы систем LiDAR. Они различаются:
- Размер зоны охвата
- Длина волны
- Позиционное выравнивание
Профилирование LiDAR
Профилирование LiDAR был первой системой, когда-либо использовавшейся еще в 1980-х годах. Он специализировался на прямолинейных объектах, таких как линии электропередач. Профилирующий LiDAR отправляет отдельный импульс в одну линию. В фиксированном надире он измеряет высоту на одном разрезе.
LiDAR малого размера
LiDAR малого размера — это то, что мы в основном используем сегодня. Он сканирует под углом около 20 градусов. Затем он перемещается назад и вперед. Если он превысит 20 градусов, инструмент LiDAR может начать видеть стороны деревьев, а не прямо вниз.
- Топографический LiDAR составляет карту земли, как правило, с использованием ближнего инфракрасного света.
- Батиметрический лидар использует проникающий в воду зеленый свет для измерения высоты морского дна и дна реки.
LiDAR с большим охватом
LiDAR с большим охватом использует полные формы волны с охватом 20 м. Но его точность низка, потому что возврат импульса может включать наклонную местность. Этот тип LIDAR использовался в двух известных экспериментах НАСА:
- SLICER (лидарное сканирование навесов с помощью восстановления эха)
- LVIS (лазерный датчик изображения растительности)
наземный LiDAR штатив и сканирует полушарие. Это особенно хорошо для сканирования зданий. Но есть также приложения в геологии, лесном хозяйстве и строительстве.
LiDAR в режиме Гейгера
LiDAR в режиме Гейгера все еще находится в экспериментальном состоянии. Но он специализируется на сканировании с большой высоты.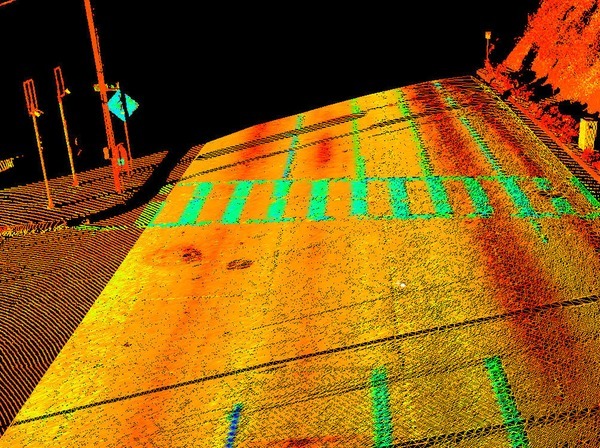 Поскольку он имеет чрезвычайно широкую полосу обзора, он может охватывать большую площадь по сравнению с другими типами LiDAR.
Поскольку он имеет чрезвычайно широкую полосу обзора, он может охватывать большую площадь по сравнению с другими типами LiDAR.
Компоненты системы LiDAR
Бортовой LiDAR состоит из 4 основных частей. Они работают вместе для получения очень точных и полезных результатов:
ДАТЧИКИ ЛИДАРА : Во время полета самолета датчики сканируют землю из стороны в сторону. Импульсы обычно находятся в зеленом или ближнем инфракрасном диапазоне.
ПРИЕМНИКИ GPS : Приемники GPS отслеживают высоту и местоположение самолета. Эти треки важны для получения точных значений рельефа и высоты.
ИНЕРЦИАЛЬНЫЕ БЛОКИ ИЗМЕРЕНИЙ (IMU) : Когда самолеты летят, IMU отслеживают их наклон. Системы LiDAR используют наклон для точного измерения угла падения импульса.
РЕГИСТРАТОРЫ ДАННЫХ : Когда LiDAR сканирует поверхность, компьютер записывает все импульсы. Затем эти записи переводятся в высоту.
Полный сигнал и дискретный
Системы LiDAR сохраняют данные LiDAR двумя способами:
- Полный сигнал
- Дискретный LiDAR
Дискретный LiDAR
Представьте, что LiDAR сканирует лесные массивы. Вы получаете 1-й, 2-й, 3-й возврат, потому что импульс попадает в несколько ветвей. Затем вы получаете большой и последний импульс от голой земли.
Вы получаете 1-й, 2-й, 3-й возврат, потому что импульс попадает в несколько ветвей. Затем вы получаете большой и последний импульс от голой земли.
Когда вы записываете данные как отдельные возвраты, это «лидар с дискретным возвратом». Короче говоря, дискретный LiDAR берет каждый пик и разделяет каждый возврат.
LiDAR с полной формой волны
Когда вы записываете весь возврат как одну непрерывную волну, это LiDAR с полной формой волны. Итак, вы просто считаете пики, это делает их дискретными.
Несмотря на то, что данные полной формы волны более сложны, LiDAR движется к системе полной формы волны.
Проекты и приложения LiDAR
Этот список применений и применений LiDAR едва ли поверхностен. Например, вот несколько способов, как мы используем LiDAR сегодня:
ЛЕСНОЕ ХОЗЯЙСТВО : Лесоводы используют LiDAR, чтобы лучше понять структуру и форму деревьев.
САМОУПРАВЛЯЕМЫЕ АВТОМОБИЛИ : Беспилотные автомобили используют сканер LiDAR для обнаружения пешеходов, велосипедистов, знаков остановки и других препятствий.