Управление автомобилем
Я Вас приветствую на этой страничке, где мы начнем изучать материальную часть автомобиля.
Чтобы начать пользоваться каким либо прибором или начать игру, необходимо прочитать и изучить инструкцию.
Управление автомобилем — игрой, конечно, не назовешь, но научиться управлять автомобилем играючи, это возможно. И я вам в этом помогу.
Работа рычагами управления
Самая главная проблема у всех, даже «опытных» водителей, научиться правильно работать рычагами управления.
Все начинается с того, как хорошо вы изучили материальную часть автомобиля.
Прежде всего надо понять, как работают основные механизмы и рычаги управления автомобиля:
сцепление
педаль газа
педаль тормоза
Главную роль в управлении движением автомобиля играют конечно педали.
Многие в начале обучения думают, что педаль надо отпускать или нажимать на определенное расстояние или с определенной силой, чтобы автомобиль плавно трогался или останавливался, вот в этом и есть главная ошибка.
Каждая педаль это только привод для передачи работы на тот или иной механизм автомобиля. Это своего рода джойстик, как в плейстейщен. Только здесь немного своя специфика.
Роль джойстика играют педали, сколько педалей — столько “джойстиков”.
Но надо учитывать, что здесь все происходит реально по-настоящему, а управлять рычагами надо будет ногами и руками одновременно.
Первая слева педаль сцепления, которую нажимают только левой ногой. Две остальные только правой ногой. ( на механике)
Подробную работу основных рычагов мы разберем на следующих страничках, переходи по ссылкам
Их совсем не много — всего пять:
№1 – педаль тормоза ( уметь вовремя среагировать для предотвращения ДТП, главное соблюдать дистанцию)
№2 – рулевое колесо (умение направлять автомобиль в нужном и безопасном направлении и чувствовать габариты автомобиля)
№3 – сцепление (самый главный элемент трансмиссии, служит для кратковременного отключения трансмиссии от двигателя при трогании с места, переключении передач и остановке).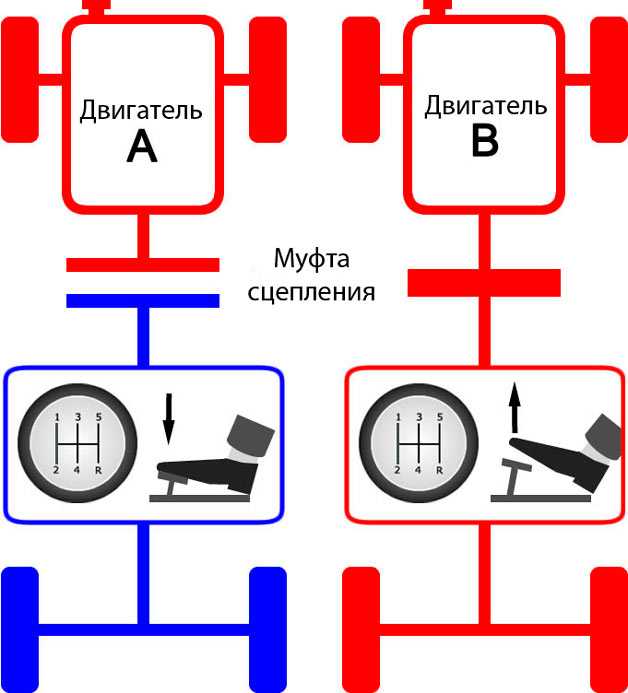 Нужно научиться работать ногами, чтобы плавно передавать обороты двигателя на колеса
Нужно научиться работать ногами, чтобы плавно передавать обороты двигателя на колеса
№4 — педаль «газа» ( привод для подачи топлива в цилиндры двигателя, в результате чего, происходит увеличение или уменьшение оборотов и мощности двигателя, акселератор)
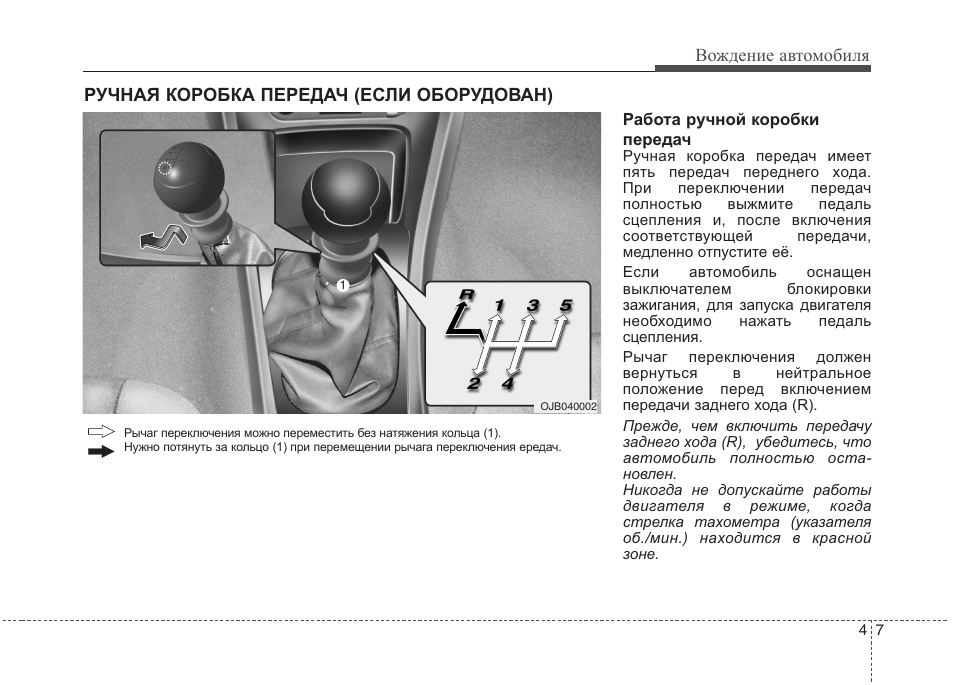
№5–рычаг переключения передач (коробка передач, выбрать нужную передачу в нужное время)
Все эти рычаги, так или иначе, связаны и дополняют друг друга.
Это значит уловить логическую цепочку профессионального вождения автомобиля.
Читайте так же:
Уроки вождения
Теория вождения автомобиля
Трогание с места
Вождение с механической коробкой передач
На главную
Проектирование автомобилей и подъемно-транспортных машин
Доцент, Доцент Асанбеков Кыдыкбек Кандидат технических наук
- «Конструкция транспортных двигателей», «Силовые агрегаты», «Теория транспортных двигателей», «Теория автомобиля и трактора», «Конструкция и эксплуатационные свойства автомобилей», «Проектирование АТП», «Энергетические силовые установки ТССН»,»Эксплуатационные свойства автомобилей», «Теория двигателя внутреннего сгорания автомобилей и тракторов»
Подробнее
Ведущий специалист, Старший преподаватель, Магистр Булатова Дарья Сергеевна
- Сертификация и лицензирование
- Управление качеством
Подробнее
Доцент Жегульский Владимир Павлович кандидат технических наук
- Специальные краны
- Основы проектирования транспортно-складских систем
- Строительные машины
- Моделирование процессов транспортно-технологических комплексов
Подробнее
Доцент Ильин Александр Васильевич кандидат технических наук
- «Конструкция автомобиля и трактора», «Техническое обслуживание и ремонт», «Техническая эксплуатация автомобилей», «Специализированный подвижной состав», «Правила дорожного движения», «автомобильная электроника», «Основы научных исследований», «Испытания автомобилей», «Тюнинг автомобилей».

Подробнее
Профессор Кожушко Герман Георгиевич Доктор технических наук
- Машины непрерывного транспорта
- Подвесные канатные дороги
Подробнее
Ведущий инженер, Старший преподаватель Летнев Константин Юрьевич
- Программное обеспечение
- Промышленные роботы
- Основы автоматизированного проектирования
- Управление техническими системами
- Грузоподъемные машины
- Машины непрерывного транспорта
Подробнее
Заведующий кафедрой, Доцент Лукашук Ольга Анатольевна кандидат технических наук
- Грузоподъемные машины
- Машины непрерывного транспорта
- Подъемно-транспортные машины
- Подъемно-транспортное оборудование машиностроительных предприятий
- Организация инженерных исследований и проектирования
- Проектирование грузоподъемных машин
Подробнее
Доцент Ляхов Сергей Владимирович Кандидат технических наук
- Ремонт и утилизация автомобилей и тракторов
- Конструкция двигателей внутреннего сгорания автомобилей и тракторов
Подробнее
Доцент, Начальник отдела
Маркина Анастасия Александровна
к. т.н.
т.н.
- Консрукция автомобилей и тракторов;
- Теория наземных трансортно-технологических комплексов;
- Основы эргономики и дизайна;
- Специализированный и специальный подвижной состав.
Подробнее
Доцент Миронов Владимир Иванович кандидат технических наук
- Строительная механика подъемно-транспортных, строительных и дорожных машин
- Проектирование металлоконструкций подъемно-транспортных, строительных и дорожных машин
Подробнее
Доцент, Доцент Огнев Игорь Геннадьевич кандидат технических наук
- «Динамика ДВС», «Динамика и конструирование ДВС», «Основы надежности технических систем», «Инженерные сооружения», «Экологическая безопасность на предприятиях автомобильного сервиса», «гибридные и комбинированные силовые установки»
Подробнее
Доцент, Доцент Строганов Юрий Николаевич кандидат технических наук
- «Эксплуатация и ремонт автомобилей и тракторов»; «Техническая эксплуатация автомобилей и тракторов»; «Типаж и эксплуатация технологического оборудования для предприятий автосервиса»; «Защита интеллектуальной собственности»; «Эксплуатация автомобилей и тракторов»; «Производственно-техническая инфраструктура предприятий автомобильного транспорта»
Подробнее
Управление машиной 101 | Construction Equipment
Для тех читателей, которые еще не используют управление машинами или были слишком заняты, чтобы следить за развитием событий, я подумал, что может быть полезно сделать общий обзор того, что это такое и почему вам следует об этом думать.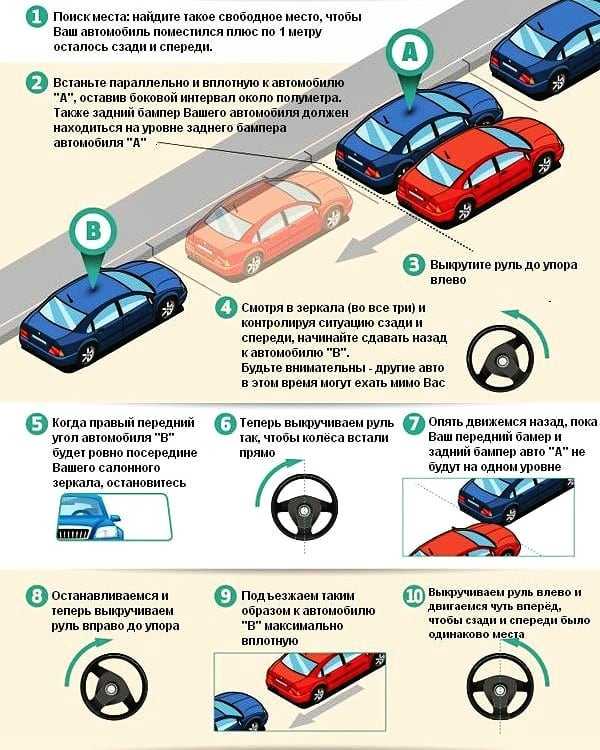
В своей простейшей форме управление машиной представляет собой использование различных датчиков позиционирования и дисплея, чтобы предоставить оператору ссылку между положением ковша или отвала и заданным уклоном. Целевой уклон может быть как сложным, как 3D-модель проекта, так и простым, как вертикальное смещение от известного уровня. В зависимости от конфигурации, системы управления машиной могут просто предоставить оператору простое визуальное руководство по положению ковша или отвала, или они могут автоматически перемещать отвал для профилирования, напрямую «общаясь» с гидравликой машины.
Датчик, который позиционирует машину относительно уклона, обычно представляет собой вращающийся лазер, тахеометр, звуковой трассировщик или усовершенствованный GPS. Большинство систем также используют датчики наклона, угла и вращения для измерения перемещений отвала или ковша относительно корпуса машины, обеспечивая оператору точность на уровне миллиметра. Дисплей оператора может быть таким же простым, как большая стрелка вверх/вниз на лазерном приемнике, или более продвинутым, как графический дисплей в кабине, показывающий различные виды положения отвала или ковша машины в реальном времени по сравнению с конструкцией.
Установка системы на вашу машину может быть очень быстрой и простой для более простых систем или немного сложнее для установок, которые подключаются к гидравлике машины. Чтобы помочь, многие производители машин предлагают машины, которые поставляются «предварительно подключенными» для установки систем управления машиной. Поговорите со своим дистрибьютором технологий и дилером машин, чтобы узнать больше о конкретных вариантах.
Существуют системы управления практически для любой имеющейся у вас техники: грейдеров, бульдозеров, экскаваторов, грунтовых и асфальтовых катков, скреперов, триммеров, фрез и асфальтоукладчиков. Причина быстрого расширения как приложений, так и отрасли связана с мощными преимуществами технологии, которые включают в себя:
• Повышение производительности и эффективности машины
• Снижение эксплуатационных расходов (топливо, техническое обслуживание, ремонт, лезвия, зубья, шины)
• Снижение затрат на геодезию — меньше разбивки
• Снижение затрат на материалы
• Повышение общей эффективности работы
• Высочайшая точность работы
• Уменьшение переделок
По отдельности каждый из них может обеспечить значительные затраты и конкурентные преимущества, но в совокупности они представляют собой настолько убедительные доводы, что они полностью меняют то, как работает строительная отрасль.
Очевидно, управление машиной — это нечто большее, чем мой простой обзор. Но это не так сложно сделать. Тысячи таких компаний, как ваша, идут по тому же пути. Лучший способ начать работу — обратиться к местному дилеру технологий. Обычно их можно найти, зайдя на веб-сайт производителя технологии.
Для дилеров Trimble или SITECH перейдите на сайт www.trimble-productivity.com и щелкните SITECH Locator.
На сайте www.trimble-productivity.com можно прочитать множество историй о том, почему и как клиенты приняли решение о внедрении технологии, и каков их опыт.0034
Основы управления движением | Machine Design
Недавно я наткнулся на простую инфографику от Power Jack Motion, которая хорошо визуализирует разницу между двигателями переменного тока (ac) и постоянного тока (dc). Эта статья будет следовать и представлять информацию, содержащуюся в ней.
Что такое управление движением?
Управление движением — это подобласть автоматизации, охватывающая системы или подсистемы, связанные с движущимися частями машин контролируемым образом. Использование компьютера для управления приводом дает преимущества, но сегодня получение данных и обратной связи становится все более важным.
Использование компьютера для управления приводом дает преимущества, но сегодня получение данных и обратной связи становится все более важным.
Некоторые компании уже видят преимущества добавления датчиков и обратной связи в производственную линию. Кроме того, эта дополнительная информация может позволить машинам взаимодействовать друг с другом и подключаться к Интернету, чтобы воспользоваться преимуществами промышленного Интернета вещей (IIoT).
Сегодня управление движением часто включает в себя смесь электронных и механических компонентов, разделенных на три части, которые считаются аналогами того, как работает человеческое тело.
Управление движением | Люди |
Процессор или контроллер движения | Мозг |
Привод | Мышцы и суставы |
Датчики | Чувства |
Чтобы уточнить это, инфографика добавила больше деталей.
Процессор или контроллер движения
Существует три типа контроллеров движения: автономные, на базе ПК и отдельные микроконтроллеры. Это становится все более и более важным фактором при настройке производственных линий. Чтобы предотвратить действующую инерцию и подготовить производственную линию к будущему, производственный мозг развивается.
Раньше программируемые логические контроллеры (ПЛК) были основным контроллером — надежным централизованным контроллером, который можно было поместить в защитный корпус и подключить к нему все необходимое. Однако по мере развития производственной линии количество кабелей, сложность и стоимость увеличивались. Сегодня ПЛК, который больше ориентирован на программное обеспечение, может лучше справляться с достижениями в области автоматизации. Программируемый контроллер автоматизации (PAC) делает именно это. Хотя это расширяет возможности ПЛК, разница в терминах спорна.
Существуют отдельные микроконтроллеры, которые позволяют производственной линии добавлять функции, не затрагивая устаревшее оборудование, или позволяют компаниям начать использовать преимущества IIoT с меньшими обязательствами. Для борьбы с устаревшим оборудованием некоторые старые ПЛК могут продолжать работать, пока добавляется новый процесс автоматизации.
Для борьбы с устаревшим оборудованием некоторые старые ПЛК могут продолжать работать, пока добавляется новый процесс автоматизации.
Например, новая система контроля может принимать или отбраковывать детали на линии. Устаревшее оборудование может этого не увидеть. Устаревшее оборудование видит только часть, входящую в одну сторону и выходящую из другой. Он может быть слеп к новому оборудованию — пока он знает, что делать с выходными данными нового оборудования, он может продолжать работать, как раньше.
Усилители и приводы
Существует множество типов усилителей и приводов, и здесь есть что разобрать. Но с точки зрения расширенной автоматизации сервоприводы выглядят так, как будто они могут добавить больше ценности и возможностей линии по сравнению с шаговыми двигателями. Однако это может увеличить стоимость и сложность. Сервоприводы и сервоусилители преобразуют ток/напряжение малой мощности, подаваемое на обмотки серводвигателя, для создания крутящего момента.
Основные характеристики двигателей переменного и постоянного тока | |
АС | DC |
Низкое потребление мощности при запуске | Простая установка |
Контролируемое ускорение | Регулирование скорости в широком диапазоне |
Регулируемая рабочая скорость | Быстрый пуск, остановка, реверс и ускорение |
Регулируемый пусковой ток | Высокий пусковой момент |
Регулируемый предел крутящего момента | Линейная кривая скорость-момент |
Синхронные двигатели переменного тока
Датчики обратной связи и механические компоненты
Датчики обратной связи определяют местоположение двигателя.