1. Назначение, устройство и работа ГРМ. Ремонт и техническое обслуживание газораспределительного механизма двигателя внутреннего сгорания
Ремонт и техническое обслуживание газораспределительного механизма двигателя внутреннего сгорания
курсовая работа
Газораспределительный механизм — механизм своевременного распределения впуска горючей смеси и выпуска отработавших газов в цилиндрах двигателя внутреннего сгорания. Осуществляется путём перекрытия и открытия поршнями продувочных окон цилиндров в двухтактных двигателях, либо открытия и закрытия впускных и выпускных клапанов в четырехтактных двигателях, имеющих привод от распределительного вала, распредвала и кулачкового механизма. Распредвал имеет жёсткую синхронизацию вращения с коленвалом, реализованную с помощью шестерёнчатой, зубчато-ремённой или цепной передачи.
Основными элементами газораспределительного механизма являются:
· распределительный вал;
· рычаги;
· ремень газораспределительного механизма или цепь;
· клапаны с мощными пружинами впускные и выпускные;
· впускные и выпускные каналы.
Распределительный вал двигателя внутреннего сгорания находится в головке блока цилиндров, а точнее — вдоль ее верхней части. Ключевыми элементами распределительного вала являются кулачки, число которых равно общему количеству впускных и выпускных клапанов. Распределительный вал расположен относительно клапанов таким образом, что каждому клапану соответствует свой кулачок. При вращении вала кулачки поочередно давят на соответствующие клапаны, благодаря чему те своевременно открываются. Когда кулачок перестает давить на клапан, распределительный вал вращается с большой скоростью, и давление очень скоротечно, он под воздействием мощной пружины возвращается на место, плотно закрывая отверстие.
В целом распределительный вал с кулачками предназначен для своевременного и согласованного с движением поршней в цилиндрах открытия и закрытия впускных и выпускных клапанов. Иначе говоря, посредством распредвала впускной клапан открывается в самом начале первого такта, когда поршень еще находится в верхней мертвой точке, и закрывается сразу, как только поршень достигнет нижней мертвой точки. Выпускной клапан открывается именно в конце третьего такта, когда поршень находится в НМТ, и закрывается по достижении им ВМТ, то есть когда выхлопные газы будут выдавлены поршнем через отверстие выпускного клапана.
Выпускной клапан открывается именно в конце третьего такта, когда поршень находится в НМТ, и закрывается по достижении им ВМТ, то есть когда выхлопные газы будут выдавлены поршнем через отверстие выпускного клапана.
Распределительный вал получает энергию вращения от коленчатого вала, с которым он соединен либо цепью, либо зубчатым ремнем газораспределительного механизма. Для этого на конце распредвала закреплена соответствующая шестерня, а на конце коленчатого вала — зубчатый шкив или звездочка. Например, в автомобиле ВАЗ-2106 используется цепь, а в ВАЗ-2108, «Форд-Эскорт», «Опель — Вектра» — ремень ГРМ.
Чтобы цепь постоянно находилась в требуемом натяжении, применяется натяжитель, установленный в комплекте с башмаком. Если в машине используется ремень ГРМ, то для его натяжения предусмотрен специальный натяжной ролик (рис. 1).
Ремень ГРМ и цепь являются весьма важными деталями. Цепь считается более надежной, но и ремень выдерживает пробег в среднем до 60 000 км. Разрыв ремня ГРМ чреват катастрофическими последствиями для двигателя будут погнуты клапаны и др: придется делать сложный и дорогостоящий капитальный ремонт. Кстати, разрыв ремня ГРМ на водительском сленге называется «встречей поршней с клапанами» в результате чего ломается и то, и другое.
Кстати, разрыв ремня ГРМ на водительском сленге называется «встречей поршней с клапанами» в результате чего ломается и то, и другое.
Поэтому, когда вы покупаете подержанный автомобиль, сразу поменяйте в нем ремень ГРМ, даже если продавец будет уверять в том, что «все заменено и все новое». Замена ремня обойдется намного дешевле капитального ремонта двигателя. Тем более что лопнуть ремень может в самое неподходящее время, например, в дороге.
Рис. 1. Схема ременного привода распределительного вала
Иногда одновременно с ремнем следует заменить и его ролики, которые со временем заметно изнашиваются. Развалившийся ролик приводит к таким же фатальным для двигателя последствиям, как и лопнувший ремень ГРМ.
Иногда из газораспределительного механизма доносится характерный металлический стук. Причиной могут быть износ кулачков распределительного вала, слишком большие зазоры клапанного механизма, поломка клапанных пружин либо износ рычагов. При наличии больших зазоров клапанного механизма их следует отрегулировать, в остальных случаях неисправные запчасти подлежат замене.
Главным критерием, по которому определяют чрезмерное увеличение зазоров у клапанов, является частый металлический стук, хорошо слышимый при работе двигателя на холостых оборотах с малой частотой вращения коленчатого вала. Данная неисправность приводит к повышенному износу торцов стержней клапанов, наконечников стержней или регулировочных шайб, а также потере мощности двигателя, поскольку время пребывания клапанов в открытом положении уменьшается и, как следствие, ухудшается наполняемость цилиндров горючей смесью и полнота их очистки на четвертом такте работы. Детали клапанного механизма (рис. 2):
Если появляются характерные хлопки из карбюратора или из глушителя — значит, зазор у клапанов чересчур маленький и его также необходимо отрегулировать. Такая неисправность является причиной неплотного прилегания клапанов к своим седлам, в результате чего снижается компрессия в цилиндрах и двигатель теряет мощность.
Рис. 2
При сильном износе клапанов следует выполнить их притирку к седлам либо вообще заменить. В некоторых случаях цепь газораспределительного механизма работает очень шумно, что, как правило, обусловлено ее удлинением за счет износа шарнирных соединений звеньев. Цепь необходимо натянуть или просто заменить.
В некоторых случаях цепь газораспределительного механизма работает очень шумно, что, как правило, обусловлено ее удлинением за счет износа шарнирных соединений звеньев. Цепь необходимо натянуть или просто заменить.
Делись добром 😉
Двухпролетный балластер ЭЛБ-3ТС
1 Назначение, работа и устройство машины ЭЛБ-3ТС
Электробалластер ЭЛБ-3ТС предназначен для подъемки железнодорожного пути с рельсами всех типов на деревянных и железобетонных шпалах, сдвижки пути одновременно с подъемкой, подборки щебня с обочин пути…
Карбюратор К-88
1.1. Назначение, устройство и работа карбюратора
Карбюратор предназначен для приготовления смеси бензина с воздухом, которая называется горючей смесью. На восьми цилиндровом двигателе автомобиля ЗИЛ-130 установлен карбюратор К-88А, имеющий две смесительные камеры…
Коробка передач автомобиля
1.1 Назначение, устройство и работа коробки передач
Назначение коробки передач.
Коробка передач служит для изменения крутящего момента по величине и направлению и длительного отсоединения двигателя от трансмиссии.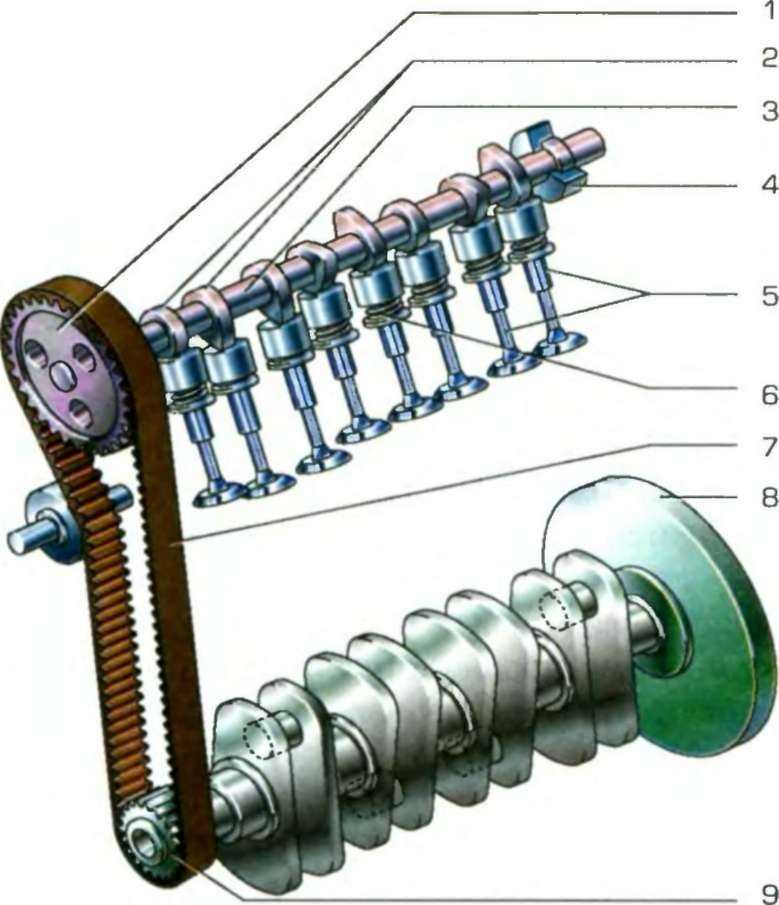 ..
..
Машина для балластировки пути. Машина ЭЛБ
1 Назначение, работа и устройство машины, общий вид
Электробалластер ЭЛБ-4С-машина непрерывного действия, предназначенная для постановки на балластное основание при выполнении работ по строительству и техническому обслуживанию пути…
Организация работы контрольного пункта автосцепки на поточно-конвейерной линии
1. Автосцепка: назначение, устройство, работа
…
Разработка средств технологического оснащения производственно-технологического комплекса изготовления механизма рулевого управления грузовых автомобилей
4.1.1 Назначение, устройство и работа
Зажимное приспособление предназначено для базирования и закрепления вала сошки на операциях протягивания и шлифования зубчатого сектора. Приспособление состоит из цангового патрона…
Разработка технологического процесса восстановления коленчатого вала ЯМЗ-236
1.1 Назначение, устройство и работа детали
коленчатый вал ремонт неисправность
Коленчатый вал воспринимает усилия, передаваемые от поршней шатунами, и преобразует их в крутящий момент, который затем через маховик передается агрегатам трансмиссии.
Разработка технологического процесса на ремонт вилки переключения заднего хода коробки передач автомобиля ГАЗ-3307, деталь №52-1702092
2.1 Назначение, устройство и работа
Назначение: Приспособление предназначается преимущественно для установки и закрепления детали при восстановлении или для механизации работ по нескольким из операций проектируемого технологического процесса. Устройство приспособления: 1…
Реконструкция участка по ремонту агрегатов ООО «Транспорт-К». Ремонт коробки передач
3.3 Назначение, устройство, работа коробки передач ЗИЛ-130
Коробка передач служит для изменения крутящего момента, передаваемого от коленчатого вала двигателя к карданному валу…
Ремонт и техническое обслуживание газораспределительного механизма двигателя внутреннего сгорания
1. Назначение, устройство и работа ГРМ
Газораспределительный механизм — механизм своевременного распределения впуска горючей смеси и выпуска отработавших газов в цилиндрах двигателя внутреннего сгорания.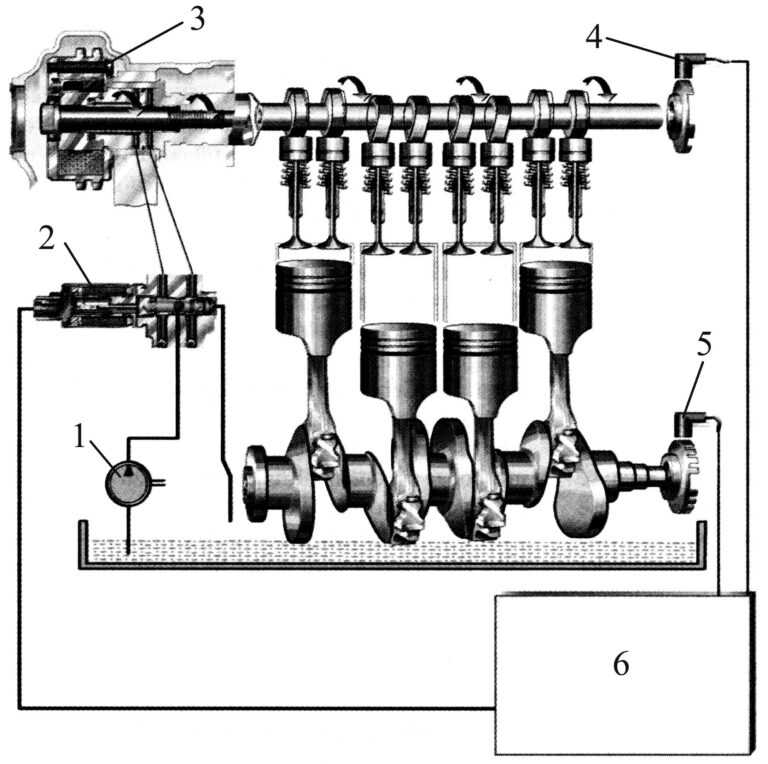 ..
..
Система смазки двигателя автомобиля
1. Назначение, устройство и работа аппарата
Смазочной называется система, обеспечивающая подачу масла к трущимся деталям двигателя. Смазочная система служит для уменьшения трения и износа деталей двигателя, охлаждения от коррозии трущихся деталей…
Технологический процесс ремонта валика насоса гидравлического усилителя руля автомобиля
2.1 Назначение, устройство и работа приспособления
Приспособление предназначено для притирки клапанов. Данное приспособление применимо ко всем типам клапанов легковых автомобилей и грузовых автомобилей малой грузоподъемности…
Трансмиссия и ходовая ГАЗ-3102
1.2 Назначение, устройство и работа трансмиссии
Трансмиссия трактора (автомобиля) объединяет агрегаты и механизмы, передающие крутящий момент двигателя ведущим колесам и изменяющие крутящий момент и частоту вращения по величине и направлению. Трансмиссия необходима по следующим причинам…
Устройство тормозной системы ВАЗ-2110
1.
 3 Назначение, характеристика, устройство и работа вакуумного усилителя
3 Назначение, характеристика, устройство и работа вакуумного усилителяВакуумный усилитель тормозов является самым распространенным видом усилителя, который применяется в системе современного автомобиля. Он создает дополнительное усилие на педали тормоза за счет разряжения…
Устройство, техническое обслуживание и ремонт системы охлаждения двигателя (5S-FE) автомобиля Toyota Camri XV-30
Раздел 1. Назначение, устройство и работа
…
1. Устройство и работа газораспределительного механизма
двигателя Ваз-21126.
Назначение и характеристика ГРМ.
ГРМ предназначен для своевременного впуска горючей смеси и выпуска отработанных газов.
Тип газораспределительного механизма – клапанный, с верхним расположением клапанов и распределительных валов.
Число клапанов на цилиндр — ——————— 4.
Привод
распределительных валов ——————
ремённый.
Привод клапанов ————————————— гидротолкателями.
ГРМ состоит из:
Распределительный вал впускных клапанов.
Распределительный вал выпускных клапанов.
Привод распределительных валов .
Гидротолкатели.
Клапанный узел:
— впускные и выпускные клапаны;
— пружины клапанов с опорными шайбами;
— тарелка пружины;
— разрезной сухарь;
— направляющая втулка;
— сёдла клапанов;
а) Распределительные валы. (рис.5.9)
Установлены
в опорах, выполненных в верхней части
головки блока, и в одном общем корпусе
подшипников, закреплённом болтами на
головке блока. (рис. 5.9) Валы изготовлены
из чугуна. Каждый распределительный
вал имеет по пять опорных шеек и по
четыре пары кулачков.
Для уменьшения износа рабочие поверхности кулачков и поверхности под сальник термообработаны – отбелены. От осевых перемещений валы удерживаются упорными буртиками, расположенными по обе стороны от
передней опоры. Распределительный вал впускных клапанов снабжён отличительным пояском ( позиция А на рис.5.9)
б) Привод распределительных валов.
В состав привода распределительных валов входят: (рис.2)
Рис.2 Схема привода распределительных валов.
1 – зубчатый шкив коленчатого вала; 2-
зубчатый ремень; 3- шкив водяного насоса;
4- натяжной ролик; 5- шкив распределительного
вала выпускных клапанов; 6- задняя
защитная крышка зубчатого ремня; 7- шкив
распределительного вала впускных
клапанов; 8- кольцо ( диск синхронизации)
для датчика фаз; 9- опорный ролик; А- метка
ВМТ на зубчатом шкиве коленчатого вала;
В- установочная метка на крышке масляного
насоса; C, F
– установочные метки на задней защитной
крышке зубчатого ремня; D-
установочная метка на шкиве
распределительного вала выпускных
клапанов; Е- установочная метка на шкиве
распределительного вала впускных
клапанов.
Распределительные валы приводятся во вращение от шкива 1 (рис.2) посредством ремённой передачи с зубчатым ремнём. Под шкивами распределительных валов находятся два ролика: слева натяжной 4, справа опорный 9. У опорного ролика отверстие для крепления выполнено по центру внутренней обоймы, у натяжного ролика оно расположено эксцентрично ( смещено от центра на 6 мм). Поэтому, поворачивая натяжной ролик относительно болта крепления, можно регулировать натяжение ремня.
Шкивы распределительных валов отличаются тем, что к шкиву 7 распределительного вала впускных клапанов приварен диск синхронизации 8, обеспечивающий работу датчика фаз.
Для установки фаз газораспределения предусмотрены установочные метки A, D, E на шкивах, В на крышке масляного насоса, а также C и F на задней крышке ремня привода. При правильно установленных фазах метка А должна совпадать с меткой В, а метки D и E – с метками С и F.
в)
Гидротолкатели.
Гидротолкатели двигателя ВАЗ- 21126, выполнены в виде цилиндрических толкателей, расположенных между распределительным валом и клапанами, совмещают две функции: передачи усилия от распредвала к клапанам и устранения зазоров в их приводе.
Рис.3. Устройство и схема работы гидротолкателя.
Устройство гидротолкателя: ( рис.3)
1.Толкатель (6).
2.Гильза (9).
3.Плунжер 7 с пружиной 8.
4. Обратный клапан 3 (шарик) с пружиной 2.
5. Корпус обратного клапана 10.
Принцип действия.
Работа
гидротолкателя основана на несжимаемости
моторного масла, постоянно заполняющего
при работе двигателя внутреннюю полость
гидротолкателя и перемещающего его
плунжер при появлении зазора в приводе
клапана. Таким образом, обеспечивается
постоянный контакт толкателя с кулачком
распределительного вала без зазора.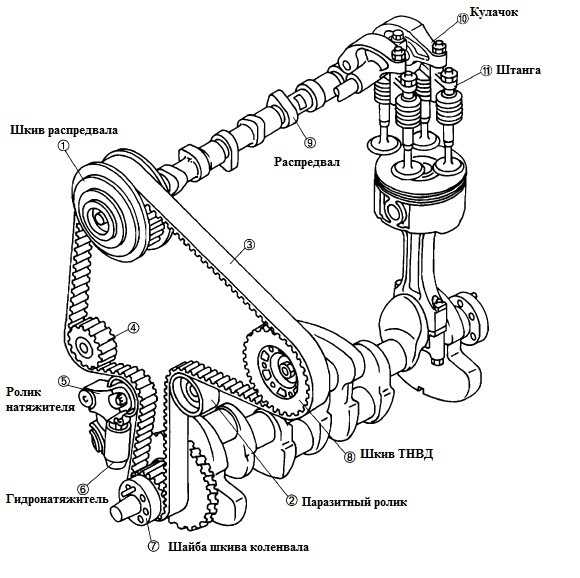 Благодаря этому отпадает необходимость
регулировки клапанов при техническом
обслуживании. Принцип действия
гидротолкателя показан на рисунке 3.
Благодаря этому отпадает необходимость
регулировки клапанов при техническом
обслуживании. Принцип действия
гидротолкателя показан на рисунке 3.
Масло под давлением, необходимым для работы гидротолкателя, подаётся во внутренние полости А и Б из канала В системы смазки двигателя через боковое отверстие в толкателе 6, выполненное в кольцевой проточке его цилиндрической поверхности. При закрытом клапане 1 толкатель 6 (через плунжер 7) и гильза 9 распирающим усилием пружины 8 прижаты соответственно к кулачку 5 распределительного вала и торцу стержня клапана. Давление в полостях А и Б одинаково, обратный клапан 3 ( шарик) гидротолкателя прижат к седлу в плунжере 7 пружиной 2 – зазоры в клапанном механизме отсутствуют.
При вращении
распределительного вала (рис.3а) кулачок
5 набегает на толкатель 6, перемещая его
и связанный с ним плунжер 7. Перемещение
плунжера 7 в гильзе 9 приводит к резкому
повышению давления в полости Б. Несмотря
на небольшие утечки масла через зазор
между плунжером и гильзой, толкатель 6
и гильза 9 перемещаются как одно целое
и открывают клапан 1.
При дальнейшем вращении распределительного вала (рис. 3б) кулачок 5 уменьшает давление на толкатель 6 и давление масла в полости Б становится ниже, чем в полости А. Обратный клапан 3 открывается и пропускает масло из полости А, соединённой с масляной магистралью двигателя, в полость Б. Давление в полости Б возрастает, гильза 9 и плунжер 7, перемещаясь относительно друг друга, выбирают зазор в клапанном механизме. Так работают гидротолкатели.
г) Клапанный узел.
Клапаны открывают
и закрывают впускные и выпускные каналы.
Клапан состоит из головки и стержня, на
конце которого имеются кольцевые
проточки. Клапаны расположены V-
образно в два ряда: с одной стороны
впускные, с другой – выпускные. Диаметр
головки впускного клапана составляет
29 мм, а выпускного – 25,5 мм. Головки
клапанов плоские. Они проще в изготовлении
и обладают необходимой жёсткостью.
Головки выпускных клапанов нагреваются
до 850 градусов Цельсия, а впускных – до
400 градусов Цельсия.
Клапанный узел состоит из самого клапана 1 (рис.4) , вставленного в направляющую втулку 2, стопорного кольца 3, маслосъёмного
Рис.4. Клапанный узел.
колпачка 4, опорной шайбы пружины 5, пружины клапана 7, тарелки пружины 8, разрезного сухаря 9.
Стержень клапана перемещается в латунной направляющей втулке 2. Направляющие втулки запрессованы в головку, снабжены стопорными кольцами, которые удерживают их . На втулки установлены маслосъёмные колпачки 4, уменьшающие попадание масла в цилиндры.
Пружины 7
служат для закрытия клапанов и плотной
посадки их в сёдла, воспринимают
инерционные усилия, возникающие при
работе механизма газораспределения.
Длина пружины в свободном состоянии
составляет 38,19 мм. Для образования
опорной поверхности концевые витки
пружины при изготовлении сближают до
соприкосновения и сошлифовывают. Нижним
концом пружина упирается в опорную
шайбу 5, расположенную на головке
цилиндров.
Устройство, Принцип Работы и Назначении, Основные Неисправности, Способы Диагностики и Ремонта
Основой любых силовых агрегатов и главной составляющей двигателей внутреннего сгорания является сложный газораспределительный механизм (ГРМ). Назначение газораспределительного механизма состоит в управлении впускными и выпускными клапанами двигателя. На такте впуска он открывает впускной клапан, смесь, состоящая из воздуха и топлива или воздуха (для дизельных двигателей), попадает в камеру сгорания. На такте выпуска — открытием выпускного клапана из камеры сгорания ГРМ удаляет отработанные газы.
Устройство газораспределительного механизма
Газораспределительный механизм состоит из следующих элементов:
- Распределительный вал — изготовляется из чугуна или стали — в задачу которого входит открывание/закрывание клапанов газораспределительного механизма при работе цилиндров.
 Он монтируется в картере, который перекрывает крышка газораспределительного механизма, или в головке блока цилиндра. При вращении вала на цилиндрических шейках происходит воздействие на клапан. На него воздействуют кулачки, расположенные на распределительном валу. На каждый клапан воздействует свой кулачек.
Он монтируется в картере, который перекрывает крышка газораспределительного механизма, или в головке блока цилиндра. При вращении вала на цилиндрических шейках происходит воздействие на клапан. На него воздействуют кулачки, расположенные на распределительном валу. На каждый клапан воздействует свой кулачек. - Толкатели, изготовленные также из чугуна или стали. В их задачу входит передача усилия от кулачков на клапаны.
- Клапаны впускные и выпускные. В их задачу входит подача топливно-воздушное смеси в камеру сгорания и удаления отработочных газов. Клапан представляет из себя стержень с плоской головкой. Основным отличием впускных и выпускных клапанов является диаметр головки. Впускной состоит из стали с хромированным покрытием, а выпускной — из жаропрочной стали. Клапанный стержень изготавливается в виде цилиндра с канавкой, необходимой для фиксирования пружины. Клапана двигаются только по направлению ко втулкам. Чтоб масло не попадало в камеру сгорания цилиндра, производят установку уплотнительного колпачка.
 Его изготавливают из маслостойкой резины. На каждый клапан крепятся внутренняя и наружная пружина, для крепления используют шайбы, тарелки.
Его изготавливают из маслостойкой резины. На каждый клапан крепятся внутренняя и наружная пружина, для крепления используют шайбы, тарелки. - Штанги. Они необходимы для передачи усилия от толкателей к коромыслу.
- Привод газораспределительного механизма. Он передает вращение коленвала на распредвал и тем самым приводит его в движения, причем движется он со скоростью в 2 раза меньше, чем скорость коленвала. На 2 вращения коленвала распредвал делает 1 вращение — это и называется рабочим циклом, при котором происходит 1 открытие клапанов.
Схема устройства ГРМ
Таково устройство ГРМ и общая схема газораспределительного механизма. Теперь следует разобраться, каков принцип работы газораспределительного механизма.
Коромысла клапанов и ось коромысла
Коромысло служит для передачи усилия от штанги (кулачка при верхнем распределительном вале) к стержню клапана. В дизельных двигателях встречается, так называемое, форсуночное коромысло, которое служит не только для преобразования движения штанги толкателя в движение стержня клапана, но и для сжатия насос-форсунки. Кроме того, коромысло предназначено для уменьшения хода толкателя при сохранении необходимой высоты подъема клапана или хода сжатия насос-форсунки.
Кроме того, коромысло предназначено для уменьшения хода толкателя при сохранении необходимой высоты подъема клапана или хода сжатия насос-форсунки.
Коромысло представляет собой неравноплечий рычаг (рис. 4, д, е, ж), качающийся вокруг неподвижной оси (ось коромысел). Для уменьшения высоты подъема толкателей и штанг и уменьшения инерционных нагрузок на эти детали, плечи коромысла выполняются неодинаковыми. Передаточное число коромысла (соотношение между плечом стержня клапана и плечом штанги) составляет примерно 1,5:1. В этом случае высота подъема клапана в полтора раза превышает высоту подъема штанги толкателя клапана. При таком передаточном числе клапанное коромысло получается достаточно компактным, что позволяет сократить габариты двигателя. Это также приводит к снижению скорости относительного скольжения вершины кулачка по торцу толкателя клапана.
Для регулировки теплового зазора в газораспределительном механизме в один конец коромысла, обычно обращенный к штанге, ввертывается регулировочный винт 3 с контргайкой. В зависимости от типа наконечника штанги головка винта может быть сферической или с внутренней сферической поверхностью. Сферическая часть головки винта закаливается, цементируется и шлифуется. В теле винта высверливаются осевой и радиальный каналы для подвода смазочного материала к трущимся поверхностям штанги и винта от оси коромысла и наоборот, от штанги к втулке оси коромысла. Иногда в длинном плече коромысла выполняют канал для подвода масла к торцу стержня клапан. Носок коромысла, опирающийся на стержень клапана, тоже подвергается термической обработке.
В зависимости от типа наконечника штанги головка винта может быть сферической или с внутренней сферической поверхностью. Сферическая часть головки винта закаливается, цементируется и шлифуется. В теле винта высверливаются осевой и радиальный каналы для подвода смазочного материала к трущимся поверхностям штанги и винта от оси коромысла и наоборот, от штанги к втулке оси коромысла. Иногда в длинном плече коромысла выполняют канал для подвода масла к торцу стержня клапан. Носок коромысла, опирающийся на стержень клапана, тоже подвергается термической обработке.
Работа газораспределительного механизма
Работа системы газораспределения поделена на четыре фазы:
- Впрыск топлива в камеру сгорания цилиндра.
- Сжатие.
- Рабочий ход.
- Удаления газов из камеры сгорания цилиндра.
Рассмотрим подробнее принцип действия газораспределительного механизма.
- Подача топлива в камеру сгорания цилиндра происходит за счет движения коленвала, который передает свое усилие на поршень и он начинает движения из так называемой ВМТ (это точка, выше которой поршень не поднимается) в НМТ (это точка, соответственно, ниже которой поршень не опускается).
 При этом движении поршня одновременно открывается впускной клапан и топливно-воздушная смесь заполняет камеру сгорания цилиндра. Впрыснув положенное количество топливно-воздушной смеси клапан закрывается. При этом коленвал поворачивается на 180 градусов от своего начального положения.
При этом движении поршня одновременно открывается впускной клапан и топливно-воздушная смесь заполняет камеру сгорания цилиндра. Впрыснув положенное количество топливно-воздушной смеси клапан закрывается. При этом коленвал поворачивается на 180 градусов от своего начального положения. - Сжатие. Дойдя до НМТ поршень продолжает свое движение. Меняя свое направление в ВМТ, в этот момент в цилиндре и происходит сжатие топливно-воздушной смеси. При подходе поршня к высшей точке фаза сжатия заканчивается. Коленчатый вал продолжает свое движения и поворачивается на 360 градусов. И на этом фаза сжатия закончена.
- Рабочий ход. Воздушно-топливная смесь воспламеняется свечей зажигания, когда поршень находится в высшей точке цилиндра. При этом достигается максимальный момент сжатия. Затем поршень начинает двигаться к нижней точке цилиндра, так как на поршень оказывают огромное давление газы, образовавшиеся при горении воздушно-топливной смеси. Это движение и есть рабочий ход. При опускании поршня до НМТ фаза рабочего хода считается завершенной.

- Удаления газов из камеры сгорания цилиндра. Поршень движется к высшей точке цилиндра, все это происходит при усилии, которое оказывает коленчатый вал газораспределительного механизма двигателя. При этом открывается выпускной клапан и поршень начинает избавлять камеру сгорания цилиндра от газов, которые образовались после сгорания топливно-воздушной смеси в камере сгорания цилиндра. После достижения высшей точки и освобождения ее от газов. Поршень начинает свое движение в низ. Когда поршень доходит да НМТ, то рабочая фаза удаления газов из камеры сгорания цилиндра считается законченной, а коленчатый вал совершает оборот на 720 градусов от своего начального положения.
Для точной работы клапанов газораспределительной системы происходит синхронизация с работой коленчатого вала двигателя.
Автомобили с цепным приводом ГРМ
Список современных автомобилей некоторых марок с цепной передачей газораспределительного механизма:
- Мазда 6.
- Шкода Рапид.

- Тойота Авенсис.
- Ниссан. Например, двигатель SR20det имеет цепь, но, если цепь вовремя не заменить, то клапана погнутся о поршни или клапан сломается, перевернется в цилиндре и пробьет поршень.
- Хонда.
- Мерседес-Бенц.
- Ауди.
- БМВ.
- Волга, Москвич, классические модели Ваз.
0
Автор публикации
не в сети 2 месяца
Неисправности ГРМ
Основные неисправности газораспределительного механизма:
- Уменьшение компрессии и хлопки в трубопроводах. Как правило, происходит после появления нагара, раковин на поверхности клапана, их прогорания, причиной чего является не плотное прилегания впускных и выпускных клапанов к седлам. Также оказывают влияние такие факторы, как деформации ГБЦ, поломка или износ пружин, заедание клапанного стержня во втулке, полное отсутствие промежутка между коромыслом и клапанами.
- Уменьшение мощности, троение мотора, а также металлические стуки. Появляются эти признаки, потому что впускные и выпускные клапана не полностью открываются, и часть воздушно-топливной смеси не попадает в камеру сгорания цилиндра.
 Следствием этого является большой тепловой зазор или поломка гидрокомпенсатора, что и становится причиной неполадки и не штатной работы клапанов.
Следствием этого является большой тепловой зазор или поломка гидрокомпенсатора, что и становится причиной неполадки и не штатной работы клапанов. - Механический износ деталей, таких как: направляющих втулок коленвала, шестерни распредвала, а также смещение распредвала. Механический износ деталей, как правило, происходи при достаточном сроке работы мотора и работы двигателя в критических пределах.
- Так же происходит выход из строя двигателя по причине износа зубчатого ремня, который имеет свой гарантийный срок службы, цепи, которая при длительном сроке работы и постоянном на нее воздействии становится менее работоспособной, успокоителя цепи и натяжителя зубчатого ремня.
В данных случаях не редко заменяют газораспределительный механизм, однако возможен и ремонт поврежденной детали газораспределительного механизма.
Через сколько км нужно менять ремень ГРМ
Причиной остановки работоспособности двигателя может стать обрыв ремня. Поэтому, желательно заблаговременно узнать, на каких двигателях гнет клапана. Положено менять ремень через каждые 60-70 тысяч км. Но, к сожалению, многие водители не успевают заменить ремень газораспределительного механизма. На машинах с 16-ти клапанными двигателями обрыв ремня не нанесет вреда клапанам, а на 8-ми клапанных происходит деформация клапана, который называется «погнуло клапана». Но на 8-ми клапанных двигателях тоже может не сгибать клапана, если двигатель расточен, на поршнях выточены специальные углубления, рассчитанные специально под размер не поднятого клапана.
Поэтому, желательно заблаговременно узнать, на каких двигателях гнет клапана. Положено менять ремень через каждые 60-70 тысяч км. Но, к сожалению, многие водители не успевают заменить ремень газораспределительного механизма. На машинах с 16-ти клапанными двигателями обрыв ремня не нанесет вреда клапанам, а на 8-ми клапанных происходит деформация клапана, который называется «погнуло клапана». Но на 8-ми клапанных двигателях тоже может не сгибать клапана, если двигатель расточен, на поршнях выточены специальные углубления, рассчитанные специально под размер не поднятого клапана.
Диагностика ГРМ
Газораспределительный механизм имеет 2 свойственные неполадки — неплотное примыкание клапанов к гнездам и невозможность полностью открыть клапаны.
Неплотное примыкание клапанов к гнездам обнаруживается по таким показателям: хлопки, возникающие иногда во впускной либо выпускной трубе, уменьшение мощности мотора. Факторами неплотного закрытия клапанов могут быть:
- возникновение нагара на поверхности клапанов и гнезд;
- формирование раковин на рабочих фасках и искривление головки клапана;
- неисправность пружин клапанов.

Неполное открытие клапанов сопровождается стуком в троящем моторе и уменьшением его мощности. Данная поломка возникает в следствии значительного промежутка меж стержнем клапана и носком коромысла. К характерным поломкам для ГРМ нужно причислить кроме того изнашивание шестерен распредвала, толкателей, направляющих клапана, смещение распредвала и изнашивание втулок и осей коромысел.
Практика демонстрирует, что на газораспределительный механизм приходится примерно четвертая часть всех отказов мотора, а уже на предотвращение этих отказов и восстановление ГРМ уходит 50% трудоёмкости обслуживания и ремонтных работ. Для диагностирования поломок применяют следующие параметры:
- определяют фазы газораспределительного механизма автомобиля;
- измеряют тепловой зазор между клапаном и коромыслом;
- измеряют промежуток между клапаном и седлом.
Измерение фаз газораспределения
Подобное диагностирование ГРМ двигателя выполняется на заглушенном моторе с помощью особого набора устройств, среди которых имеются указатель, моментоскоп, малка-угломер и прочие дополнительные приборы. Для того, чтобы фиксировать период раскрытия впускного клапана на 1-ом цилиндре, необходимо покачивать вокруг своей оси коромысло, а далее направить коленвал мотора до момента появления зазора меж клапаном и коромыслом. Малка-угломер для замера разыскиваемого зазора ставится прямо на шкив коленвала.
Для того, чтобы фиксировать период раскрытия впускного клапана на 1-ом цилиндре, необходимо покачивать вокруг своей оси коромысло, а далее направить коленвал мотора до момента появления зазора меж клапаном и коромыслом. Малка-угломер для замера разыскиваемого зазора ставится прямо на шкив коленвала.
Измерение теплового промежутка между клапаном и коромыслом
Тепловой зазор измеряют при помощи набора щупов либо иного особого устройства. Это набор из металлических пластинок длиной в 100мм, толщина которых обязана быть не больше 0,5мм. Коленвал мотора поворачивают вплоть до верхней предельной точки, в период такта сжатия подобранного для контроля цилиндра. Непосредственно благодаря щупам разной толщины, поочередно вставляемым в сформировавшееся отверстие, и измеряется зазор.
Данный метод не может дать результата при диагностировании ГРМ, когда неравномерен износ торца штока и бойка коромысла, а трудоемкость этого метода весьма значительная. Увеличить точность замеров позволяет особое устройство, которое состоит из корпуса и индикатора по типу часов.
Подпружиненная подвижная рама содержит персональное соединение с ножкой этого индикатора. Раму фиксируют между коромыслом и клапанной пружиной. Когда открывается клапан, в период поворота коленвала, на индикаторе ставят 0. Распознает тепловой зазор последующее показание прибора, снимаемое в период поворота коленвала.
Определение промежутка между клапаном и седлом
Его можно оценить по объему воздуха, который будет выходить через уплотнитель перекрытых клапанов. Эта процедура прекрасно объединяется с чисткой форсунок. Когда они уже сняты, убирают валики коромысел и прикрывают все клапаны. Затем в камеру сгорания под большим давлением происходит подача сжатого воздуха. Поочередно на любом из контролируемых клапанов ставят устройство, которое позволяет измерить расход воздуха. Если потеря воздуха превысит разрешенную, выполняется ремонт газораспределительного механизма.
Толкатели
Усилия от кулачков распределительного вала передается непосредственно клапанам или штангам через толкатели, которые воспринимают боковые нагрузки от кулачков и разгружают детали ГРМ. При работе толкатели клапанов следуют по контуру или профилю кулачков распределительного вала, тем самым обеспечивая преобразование вращения кулачка в возвратно-поступательное движение клапанного механизма. Боковая поверхность толкателя изнашивается из-за трения в направляющих, а торцевые поверхности – под действием контактных напряжений, создаваемых кулачком распределительного вала и наконечником штанги либо пяткой стержня клапана.
При работе толкатели клапанов следуют по контуру или профилю кулачков распределительного вала, тем самым обеспечивая преобразование вращения кулачка в возвратно-поступательное движение клапанного механизма. Боковая поверхность толкателя изнашивается из-за трения в направляющих, а торцевые поверхности – под действием контактных напряжений, создаваемых кулачком распределительного вала и наконечником штанги либо пяткой стержня клапана.
Для обеспечения подвижного контакта со штангой в толкателях выполняется сферическое гнездо радиусом r1 на 0,2…0,3 мм больше радиуса головки штанги r2 (рис. 1, г).
В зависимости от схемы привода применяют толкатели различных конструкций. Наибольшее распространение получили грибковые толкатели с плоской или сферической опорной поверхностью; цилиндрические толкатели со сферической или роликовой опорной поверхностью; рычажные выпуклые или роликовые толкатели.
Для обеспечения равномерного изнашивания опорной поверхности толкателя обеспечивают его вращение вокруг своей оси путем смещения продольной оси толкателя относительно оси симметрии кулачка (рис. 1, б). С этой же целью опорная поверхность толкателя выполняется сферической, а опорная поверхность кулачка – концентрической с углом наклона образующей к оси вала 7’…15′.
1, б). С этой же целью опорная поверхность толкателя выполняется сферической, а опорная поверхность кулачка – концентрической с углом наклона образующей к оси вала 7’…15′.
Толкатели старых конструкций, в большинстве своем, имеют плоскую или выпуклую контактную поверхность, по которой скользит кулачок. Однако, в ряде конструкций толкателей используется ролик, перекатывающийся по поверхности кулачка (рис. 1, д). Роликовые толкатели используют в двигателях главным образом для снижения потерь на трение в клапанном механизме (эффект от снижения потерь достигает 8%). Снижение затрат на трение увеличивает экономичность двигателей и оправдывает повышение стоимости производства толкателей такой конструкции.
Роликовый цилиндрический толкатель обеспечивает меньшее изнашивание кулачка распределительного вала, чем грибковый или цилиндрический толкатель со сферической опорной поверхностью. Однако изнашивание боковых поверхностей роликового толкателя больше, так как такой толкатель не может вращаться вокруг своей оси, и боковые нагрузки всегда воспринимаются одними и теми же сопрягаемыми поверхностями.
Для предотвращения от поворачивания вокруг оси роликовые толкатели должны быть закреплены с помощью специальных держателей, удерживающих ролики в одной плоскости с кулачками распределительного вала. При поломке держателя роликовый толкатель получает свободу вращения вокруг своей оси, при этом разрушается как сам толкатель, так и распределительный вал.
Рычажные толкатели (рис. 1, ж), установленные на одной общей оси, не имеют направляющих, и, следовательно, трение скольжения в них отсутствует.
Общим недостатком роликовых толкателей является сложность конструкции и большая масса подвижных деталей, которая у рычажно-выпуклого толкателя несколько меньше.
Цилиндрические толкатели устанавливаются в направляющих, которые выполняются обычно в блок-картере.
Наличие зазоров в механизме газораспределения приводит к ударам движущихся деталей и ускорению их изнашивания. Для устранения этого недостатка могут применяться так называемые гидравлические толкатели (гидрокомпенсаторы) (рис. 1, з), работающие без зазора. Принцип действия конструкции, показанной на рисунке, заключается в следующем: штанга привода клапана упирается в головку 2 плунжера 3, расположенного внутри корпуса толкателя. Плунжер постоянно прижат пружиной 5 к штанге, а его внутренняя полость сообщается с масляной магистралью, и при открытом пластинчатом клапане 4 давление в ней равно давлению в масляной магистрали, которое создается насосом смазочной системы двигателя.
1, з), работающие без зазора. Принцип действия конструкции, показанной на рисунке, заключается в следующем: штанга привода клапана упирается в головку 2 плунжера 3, расположенного внутри корпуса толкателя. Плунжер постоянно прижат пружиной 5 к штанге, а его внутренняя полость сообщается с масляной магистралью, и при открытом пластинчатом клапане 4 давление в ней равно давлению в масляной магистрали, которое создается насосом смазочной системы двигателя.
В начале подъема толкателя давление под плунжером резко увеличивается, что вызывает закрытие клапана 4, и усилие передается на штангу. Такие толкатели требуют для работы только чистое масло с высоким индексом вязкости.
Для изготовления толкателей используются специальные чугуны и стали. В чугунных толкателях опорная поверхность отбеливается, в стальных ее закаливают токами высокой частоты, наплавляют легированным отбеленным чугуном. Боковые и внутренние поверхности толкателей цементируют и закаливают. Ролики в роликовых и качающихся рычажных толкателях выполняются из шарикоподшипниковой стали, а втулки роликов – из бронзы.
При замене распределительного вала толкатели желательно поменять на новые. Если предполагается повторно использовать толкатели, бывшие в употреблении, то, вынимая их из двигателя, нужно обязательно помечать, из каких направляющих они вынимаются и после ремонта устанавливать их в те же направляющие. Такие (бывшие в употреблении) толкатели должны быть тщательно очищены и осмотрены; в случае обнаружения выработки на роликах или (в зависимости от конструкции) вогнутости на поверхности днища — толкатель полежит замене.
***
Процесс ремонта ГРМ
Частенько необходимо производить техническое обслуживание газораспределительного механизма. Основной проблемой являются износ шеек, кулачков вала и увеличение зазоров в подшипниках. Для того, чтобы устранить зазор в подшипниках коленчатого вала, производят его ремонт путем шлифовки опорных шеек и углубления канавок для подачи масла. Шейки нужно отшлифовать под ремонтный размер. После завершения ремонтных работ по восстановлению коленвала, нужно произвести проверку высоты кулачков.
На опорных поверхностях под шейки коленвала не должно быть никаких даже самых незначительных повреждений, а корпуса подшипников обязаны быть без трещин. После чистки и промывки распредвала обязательно нужно проверить зазор между его шейками и отверстием опоры головки цилиндра.
Для определения точного зазора требуется знать диаметр шейки распредвала, это позволит произвести установку соответствующего ей подшипника. Установив его на корпус, замерьте внутренний диаметр подшипника, затем отнимите его от диаметра шейки и таким образом найдете величину зазора. Он не может превышать 0,2мм.
Цепь не должна иметь никаких механических повреждений, быть растянутой более чем на 4мм. Цепь газораспределительного механизма можно регулировать: отверните стопорный болт на пол оборота, поверните коленвал на 2 оборота, затем стопорный болт нужно повернуть до упора.
Если у вас возникли вопросы — оставляйте их в комментариях под статьей. Мы или наши посетители с радостью ответим на них
Синхронизация нескольких устройств для Интернета
Аннотация
Механизмы синхронизации позволяют выполнять операции в нужное время. В Интернете уже есть несколько механизмов, поддерживающих синхронизированные операции, в том числе setTimeout и setInterval, а также контроллеры для медиа-фреймворков и анимации. Однако в Интернете отсутствует поддержка синхронизации нескольких устройств. Механизм синхронизации с несколькими устройствами позволил бы синхронизировать операции на веб-страницах, размещенных на разных устройствах. Синхронизация нескольких устройств особенно важна для индустрии вещания, поскольку она является ключевым фактором, позволяющим предлагать вторичные веб-устройства. В более общем плане синхронизация с несколькими устройствами имеет широкое применение в общении, совместной работе и многоэкранных презентациях. Эта группа сообщества стремится определить общий механизм синхронизации для нескольких устройств и практическую модель программирования. Это улучшит Интернет как платформу для чувствительных ко времени веб-приложений для нескольких устройств.
В Интернете уже есть несколько механизмов, поддерживающих синхронизированные операции, в том числе setTimeout и setInterval, а также контроллеры для медиа-фреймворков и анимации. Однако в Интернете отсутствует поддержка синхронизации нескольких устройств. Механизм синхронизации с несколькими устройствами позволил бы синхронизировать операции на веб-страницах, размещенных на разных устройствах. Синхронизация нескольких устройств особенно важна для индустрии вещания, поскольку она является ключевым фактором, позволяющим предлагать вторичные веб-устройства. В более общем плане синхронизация с несколькими устройствами имеет широкое применение в общении, совместной работе и многоэкранных презентациях. Эта группа сообщества стремится определить общий механизм синхронизации для нескольких устройств и практическую модель программирования. Это улучшит Интернет как платформу для чувствительных ко времени веб-приложений для нескольких устройств.
Синхронизация нескольких устройств
Механизмы синхронизации позволяют выполнять операции в нужное время. Синхронизация имеет много целей, таких как правильный порядок времени, задержка, параллелизм/синхронизация, периодичность или, возможно, корректировка скорости выполнения или обработки.
Синхронизация имеет много целей, таких как правильный порядок времени, задержка, параллелизм/синхронизация, периодичность или, возможно, корректировка скорости выполнения или обработки.
Конечно, в Сети уже есть несколько механизмов, поддерживающих синхронизированные операции. Наиболее известные setTimeout и setInterval обеспечивают довольно точное синхронизированное выполнение JavaScript и являются основой для синхронизированной анимации. HTML5MediaElement также считается механизмом синхронизации, поскольку он обеспечивает синхронизированное представление непрерывного мультимедиа и элементы управления воспроизведением. Точно так же HTMLTrackElement предлагает выравнивание по времени субтитров и информации о главах. WebAnimations — это фреймворк для анимации с контролем воспроизведения.
Однако в Интернете отсутствует поддержка синхронизации нескольких устройств. Все описанные выше механизмы синхронизации ограничены одной веб-страницей. Напротив, механизм синхронизации с несколькими устройствами позволил бы выполнять синхронизированные операции на веб-страницах, размещенных на разных устройствах.
Напротив, механизм синхронизации с несколькими устройствами позволил бы выполнять синхронизированные операции на веб-страницах, размещенных на разных устройствах.
Цели
Группа сообщества стремится определить общий механизм синхронизации для нескольких устройств и практическую модель программирования для чувствительных ко времени веб-приложений для нескольких устройств.
Видение
Мы предполагаем, что ресурсы времени для нескольких устройств, такие как часы, секундомеры, тайм-ауты или контроллеры, должны быть явно представлены как объекты сети. Это означает, что временные ресурсы идентифицируются по URL-адресам и размещаются на выделенных веб-серверах или службах. Таким образом, несколько устройств могут совместно использовать ресурсы времени, подключаясь к одному и тому же URL-адресу. Кроме того, устройства могут осуществлять контроль над временными ресурсами, взаимодействуя с серверным объектом. Например, приложения будут иметь возможность запрашивать ресурсы синхронизации для замедления или ускорения, а также запрашивать у контроллеров паузу, возобновление или возврат к началу.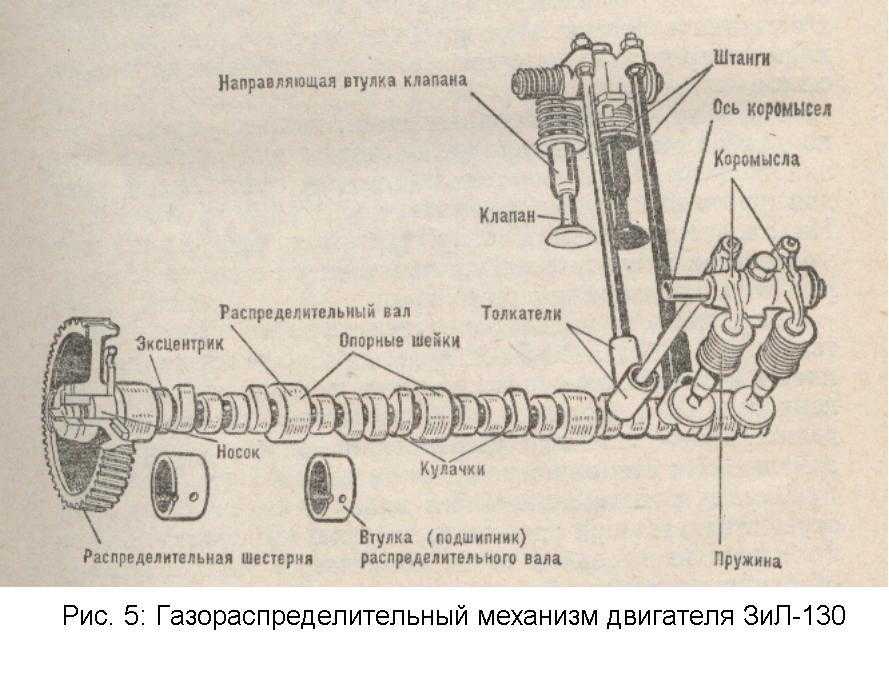 Эффекты управления таймингом будут одинаково доступны для всех подключенных устройств. Наконец, поскольку ресурсы синхронизации с несколькими устройствами являются настоящими объектами Интернета, применяются традиционные концепции владения и контроля доступа, которые могут обеспечиваться серверами. Таким образом, разные разрешения (например, только чтение, чтение-запись) могут быть предоставлены разным конечным пользователям и/или разным компонентам приложения.
Эффекты управления таймингом будут одинаково доступны для всех подключенных устройств. Наконец, поскольку ресурсы синхронизации с несколькими устройствами являются настоящими объектами Интернета, применяются традиционные концепции владения и контроля доступа, которые могут обеспечиваться серверами. Таким образом, разные разрешения (например, только чтение, чтение-запись) могут быть предоставлены разным конечным пользователям и/или разным компонентам приложения.
Это видение соответствует классической клиент-серверной архитектуре Интернета. Это видение также позволяет использовать модель программирования, в которой веб-приложения могут определять и использовать ресурсы синхронизации на уровне приложения (например, часы, секундомеры, тайм-ауты или контроллеры) для конкретных целей приложения. Эти временные ресурсы затем управляют выполнением соответствующих, чувствительных ко времени аспектов этого приложения. По сути, срочным выполнением можно управлять удаленно из любой точки мира через сервер, на котором размещены ресурсы синхронизации.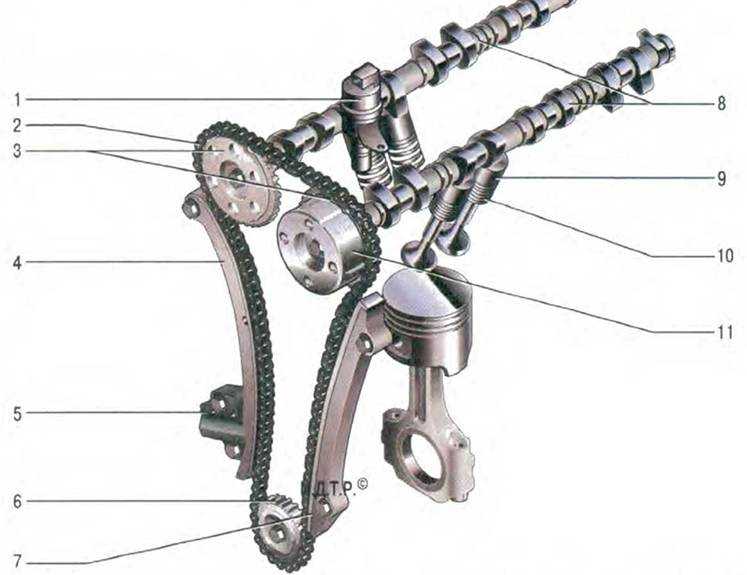 Этот подход естественным образом соответствует характеру современных веб-приложений, управляемому событиями.
Этот подход естественным образом соответствует характеру современных веб-приложений, управляемому событиями.
Ресурсы синхронизации для нескольких устройств будут смоделированы на основе существующих концепций синхронизации, т. Е. Системных часов, секундомеров, механизмов тайм-аута и контроллеров медиа- и анимационных фреймворков. Короче говоря, CG стремится обеспечить реализацию этих концепций для нескольких устройств (с осознанием того, что это может потребовать модификации существующих концепций и API).
Синхронизация нескольких устройств подразумевает, что ресурсы синхронизации могут быть легко разделены между распределенными компонентами в веб-приложении с несколькими устройствами или даже между различными приложениями вместе. Также обратите внимание, что ресурсы синхронизации нескольких устройств поддерживают абстракцию одновременности (в реальном времени). По сути, они реализуют распределенное соглашение во времени. Итак, если медиаконтроллер для конкретного приложения используется совместно, скажем, 100 000 устройств, и все они оценивают контроллер currentTime (во время воспроизведения), в один и тот же момент времени они в идеале должны получить одинаковое смещение носителя. Кроме того, если одно устройство запрашивает у контроллера переход на 5 секунд вперед, это в идеале влияет на всех подключенных клиентов одинаково и немедленно. Реализации ресурсов синхронизации для нескольких устройств должны максимально точно аппроксимировать это идеальное поведение.
Кроме того, если одно устройство запрашивает у контроллера переход на 5 секунд вперед, это в идеале влияет на всех подключенных клиентов одинаково и немедленно. Реализации ресурсов синхронизации для нескольких устройств должны максимально точно аппроксимировать это идеальное поведение.
Кроме того, должна быть доступна точная синхронизация нескольких устройств для любой комбинации устройства, сетевого подключения, ОС или веб-браузера. Короче говоря, ресурсы синхронизации для нескольких устройств должны быть доступны всегда и везде, где доступен Интернет.
Наконец, основная цель модели программирования для нескольких устройств — облегчить и упростить комбинирование чувствительных ко времени компонентов приложения в приложениях для нескольких устройств. В частности, мы представляем общий API между веб-браузерами и поставщиками ресурсов синхронизации для нескольких устройств. Общий API был бы большим вкладом в функциональную совместимость компонентов приложения, чувствительных ко времени, и даже позволил бы независимым системам совместно использовать временные аспекты без обязательного совместного использования каких-либо данных приложения. Общий API также будет работать против разработки собственных временных решений и технологических «островов».
Общий API также будет работать против разработки собственных временных решений и технологических «островов».
Объем работ
CG будет:
- Определите общий API для ресурсов синхронизации нескольких устройств, т. е. часов, секундомеров, тайм-аутов и контроллеров.
- Просмотрите существующие концепции программирования для работы с синхронизацией, т. е. setTimeout, setInterval, HTML5MediaElement, HTMLTrackElement, WebAnimation, и предложите корректировки для упрощения интеграции с ресурсами синхронизации для нескольких устройств.
- Разработайте спецификацию протокола для общего интерфейса между веб-браузерами и поставщиками ресурсов синхронизации для нескольких устройств.
- Обсудить встроенную поддержку синхронизации нескольких устройств в веб-браузерах.
Результатом этого, вероятно, будет сочетание отчетов об ошибках, предложений API и спецификаций протокола.
В качестве отправной точки CG будет заимствовать концепции, идеи и решения из предложения Shared Motion [SMP] (также известного как Media State Vectors [MSV]). Shared Motions — это общая концепция для синхронизации нескольких устройств в Интернете, поддерживающая часы, секундомеры, тайм-ауты и широкий спектр контроллеров. В Shared Motion используется централизованный подход, при котором движения размещаются в сети специализированными службами движения. Исследование Shared Motion документирует ошибки синхронизации < 10 мс, когда Shared Motion используется для распределенной синхронизации видео и аудио HTML5 с помощью обычных неоптимизированных веб-браузеров [SYNQ]. Хотя пределы масштабируемости еще не были официально задокументированы, легкий характер Shared Motion указывает на то, что онлайн-службы синхронизации могут быть хорошо масштабируемыми.
Shared Motions — это общая концепция для синхронизации нескольких устройств в Интернете, поддерживающая часы, секундомеры, тайм-ауты и широкий спектр контроллеров. В Shared Motion используется централизованный подход, при котором движения размещаются в сети специализированными службами движения. Исследование Shared Motion документирует ошибки синхронизации < 10 мс, когда Shared Motion используется для распределенной синхронизации видео и аудио HTML5 с помощью обычных неоптимизированных веб-браузеров [SYNQ]. Хотя пределы масштабируемости еще не были официально задокументированы, легкий характер Shared Motion указывает на то, что онлайн-службы синхронизации могут быть хорошо масштабируемыми.
Вне области
- Механизмы синхронизации, основанные на предположениях о синхронизированных системных часах (например, NTP), не рассматриваются, поскольку синхронизированные системные часы не являются реалистичным предположением в веб-среде. Особенно это актуально на мобильных устройствах.

- Механизмы синхронизации, основанные на предположениях о интернет-провайдере, сетевом операторе, интрасети или другом локальном канале связи, не рассматриваются. Службы синхронизации с несколькими устройствами должны работать везде, где работает Интернет, и не могут делать никаких предположений, кроме того, что устройства подключены к Интернету, имеют внутренние часы и поддерживают связь TCP. Кроме того, он должен продолжать работать в настройках NAT без переадресации портов и т. д.
- Механизмы синхронизации, которые не могут надежно обеспечить точность синхронизации губ или лучше, выходят за рамки. Хотя во многих приложениях синхронизация губ не требуется, возможность использовать единый механизм, не зависящий от требований к точности, ценна.
- Механизмы синхронизации, основанные на многоадресной потоковой передаче или распространении импульсов, не рассматриваются, поскольку на точность влияет изменение сетевой задержки.
- Механизмы синхронизации, которые просто предоставляют часы (т.
 е. только для чтения), выходят за рамки. Механизм синхронизации для нескольких устройств для Интернета должен поддерживать модель программирования, позволяющую коду приложения взаимодействовать с аспектами синхронизации внутри приложения и управлять ими.
е. только для чтения), выходят за рамки. Механизм синхронизации для нескольких устройств для Интернета должен поддерживать модель программирования, позволяющую коду приложения взаимодействовать с аспектами синхронизации внутри приложения и управлять ими. - Механизмы синхронизации, которые плохо масштабируются, выходят за рамки. Например, синхронизация нескольких устройств в сценариях вещания может потребовать индивидуальной синхронизации миллионов устройств.
- Механизмы синхронизации, которые поддерживают только одностороннее асимметричное управление, выходят за рамки, поскольку взаимодействие и управление, как правило, не должны ограничиваться одним устройством, а должны быть доступны с нескольких устройств. Вместо этого, при желании, асимметричное управление может быть достигнуто с помощью ограничений для конкретных приложений, наложенных поверх симметричного механизма.
- Форматы данных для синхронизации мультимедиа и операции по времени выходят за рамки.
 В этой CG нас интересуют только ресурсы синхронизации нескольких устройств. CG поддерживает модель, в которой ресурсы синхронизации четко отделены от ресурсов данных. Это означает, что ресурсы синхронизации могут использоваться в сочетании с синхронизированными данными любого типа и остаются актуальными для любого выбора механизма доставки данных. Эта модель также поддерживает разделение ответственности, поскольку серверные службы могут быть специализированы только для синхронизации, что необходимо для обеспечения высокой точности и масштабируемости. Форматы данных для синхронизированных данных уже охватываются другими группами в рамках W3C, а также другими органами стандартизации.
В этой CG нас интересуют только ресурсы синхронизации нескольких устройств. CG поддерживает модель, в которой ресурсы синхронизации четко отделены от ресурсов данных. Это означает, что ресурсы синхронизации могут использоваться в сочетании с синхронизированными данными любого типа и остаются актуальными для любого выбора механизма доставки данных. Эта модель также поддерживает разделение ответственности, поскольку серверные службы могут быть специализированы только для синхронизации, что необходимо для обеспечения высокой точности и масштабируемости. Форматы данных для синхронизированных данных уже охватываются другими группами в рамках W3C, а также другими органами стандартизации.
Важность
Механизм синхронизации для нескольких устройств значительно улучшит Интернет как платформу для чувствительных к синхронизации приложений для нескольких устройств.
В частности, индустрия вещания предоставляет множество вариантов использования синхронизации с несколькими устройствами. Например, для веб-трансляций прямых спортивных трансляций может потребоваться задержка, соответствующая задержке сетей вещания. Живой веб-контент также требует представления со сдвигом во времени, чтобы соответствовать более позднему потреблению по запросу. Предложения сопутствующих веб-устройств должны быть синхронизированы с программами, которые они обогащают, как в режиме реального времени, так и в настройках по требованию. Функции специальных возможностей для телевидения могут включать в себя возможность воспроизведения звуковых дорожек на иностранном языке со смартфонов, синхронизированных (синхронизация по губам) с общим экраном. Путешествующие зрители могут предпочесть «легкий» вариант телепрограмм. Это может быть аудио плюс легкий синхронизированный HTML5 в качестве альтернативы HD-сигналам, потребляющим полосу пропускания. Интерактивная, чувствительная ко времени реклама на сопутствующих устройствах может открыть новые формы взаимодействия и дохода.
Например, для веб-трансляций прямых спортивных трансляций может потребоваться задержка, соответствующая задержке сетей вещания. Живой веб-контент также требует представления со сдвигом во времени, чтобы соответствовать более позднему потреблению по запросу. Предложения сопутствующих веб-устройств должны быть синхронизированы с программами, которые они обогащают, как в режиме реального времени, так и в настройках по требованию. Функции специальных возможностей для телевидения могут включать в себя возможность воспроизведения звуковых дорожек на иностранном языке со смартфонов, синхронизированных (синхронизация по губам) с общим экраном. Путешествующие зрители могут предпочесть «легкий» вариант телепрограмм. Это может быть аудио плюс легкий синхронизированный HTML5 в качестве альтернативы HD-сигналам, потребляющим полосу пропускания. Интерактивная, чувствительная ко времени реклама на сопутствующих устройствах может открыть новые формы взаимодействия и дохода.
В более общем плане синхронизация нескольких устройств является ключом к ряду очень важных функций в приложениях с несколькими устройствами. Представление одного и того же контента на разных устройствах по времени представляет собой совместный просмотр и может также потребовать совместного управления. Для инструментов презентации могут быть решения, основанные на удаленном управлении HTML5, в качестве альтернативы совместному использованию экрана на основе видео. Синхронизация с несколькими устройствами также позволяет использовать многоэкранные решения. Визуализация сложных моделей временных данных может быть разделена на несколько экранов, но при этом перемещаться в унисон по общей временной шкале. Синхронизация с несколькими устройствами также может использоваться для записи данных, вводимых из распределенных источников, в соответствии с общими часами, а затем позже для воспроизведения этих аспектов синхронизации при воспроизведении на нескольких устройствах.
Представление одного и того же контента на разных устройствах по времени представляет собой совместный просмотр и может также потребовать совместного управления. Для инструментов презентации могут быть решения, основанные на удаленном управлении HTML5, в качестве альтернативы совместному использованию экрана на основе видео. Синхронизация с несколькими устройствами также позволяет использовать многоэкранные решения. Визуализация сложных моделей временных данных может быть разделена на несколько экранов, но при этом перемещаться в унисон по общей временной шкале. Синхронизация с несколькими устройствами также может использоваться для записи данных, вводимых из распределенных источников, в соответствии с общими часами, а затем позже для воспроизведения этих аспектов синхронизации при воспроизведении на нескольких устройствах.
Подводя итог, синхронизация нескольких устройств имеет серьезные последствия для Интернета как общей платформы для общения, совместной работы и презентаций. Скорее всего, это затронет все области веб-активности; в частности, радиовещание, онлайн-СМИ, образование, здравоохранение, музыка, промышленность и правительство.
Скорее всего, это затронет все области веб-активности; в частности, радиовещание, онлайн-СМИ, образование, здравоохранение, музыка, промышленность и правительство.
Процесс сообщества и бизнес-группы
Условия данного устава, противоречащие условиям процесса сообщества и бизнес-группы, недействительны.
Работа ограничена рамкой устава
Группа не будет публиковать отчеты групп сообщества, которые являются спецификациями по темам, отличным от тех, которые перечислены в разделе «Отчеты групп сообщества, которые являются спецификациями» выше. Ниже описано, как изменить устав. CLA применяется к этим отчетам групп сообщества.
Механика вклада
Для этих отчетов участники группы сообщества соглашаются отправлять материалы либо в список «contrib» группы, либо в общий список группы, с темой, начинающейся с ««[short-name-for spec]». Когда обсуждение на собрании включает в себя вклады, ожидается, что участники запишут эти вклады явно в список рассылки, как описано.
Выбор стула
Участники этой группы выбирают своих Председателей и могут заменить их в любое время, используя любые средства, которые они предпочитают. Однако, если 5 участников (никаких двух из одной и той же организации) призывают к выборам, группа должна использовать следующий процесс, чтобы заменить любого действующего председателя (председателей) новым председателем, консультируясь с руководителем отдела развития сообщества по избирательным операциям (например, голосование). инфраструктуры и с использованием RFC 2777).
- Участники объявляют свои кандидатуры. У участников есть 14 дней, чтобы объявить свои кандидатуры, но этот период заканчивается, как только все участники объявят о своих намерениях. Если есть только один кандидат, он становится председателем. При наличии двух и более кандидатов проводится голосование. В противном случае ничего не меняется.
- Участники голосуют. У участников есть 21 день, чтобы проголосовать за одного кандидата, но этот период заканчивается, как только проголосуют все участники.
 Председателем избирается человек, набравший наибольшее количество голосов (не два от одной организации). В случае ничьей RFC2777 используется для разрыва ничьей. Избранный председатель может назначать сопредседателей.
Председателем избирается человек, набравший наибольшее количество голосов (не два от одной организации). В случае ничьей RFC2777 используется для разрыва ничьей. Избранный председатель может назначать сопредседателей.
Участники, недовольные результатами выборов, могут попросить вмешаться руководителя по развитию сообщества. Руководитель отдела развития сообщества после оценки результатов выборов может предпринять любые действия, в том числе бездействовать.
Процесс принятия решения
Эта группа будет стремиться принимать решения при наличии консенсуса. Когда группа обсуждает вопрос в списке рассылки и поступает призыв от группы оценить консенсус, после надлежащего рассмотрения различных мнений Председатель должен зафиксировать решение и любые возражения. Участники могут призвать к онлайн-голосованию, если они считают, что Председатель неточно определил консенсус группы или если Председатель отказывается оценивать консенсус. В объявлении о голосовании должна быть указана продолжительность голосования, которая должна составлять не менее 7 дней и не более 14 дней. Председатель должен начать голосование в течение 7 дней с момента запроса. Решение будет принято на основании большинства поданных бюллетеней. Председатель несет ответственность за то, чтобы процесс принятия решений был справедливым, соблюдал консенсус ГК и не давал необоснованного преимущества или дискриминации в отношении какого-либо участника группы или его работодателя.
Председатель должен начать голосование в течение 7 дней с момента запроса. Решение будет принято на основании большинства поданных бюллетеней. Председатель несет ответственность за то, чтобы процесс принятия решений был справедливым, соблюдал консенсус ГК и не давал необоснованного преимущества или дискриминации в отношении какого-либо участника группы или его работодателя.
Прозрачность
Всю техническую работу группа будет вести в общедоступном списке рассылки. Любые решения, принятые на любой встрече, являются предварительными. Любой участник группы может возразить против решения, принятого на онлайн-встрече, в течение 7 дней с момента публикации решения в рассылке. Затем это решение должно быть подтверждено в списке рассылки с помощью процесса принятия решения, описанного выше.
Изменения к настоящему Уставу
Группа может принять решение о работе над предложенной измененной хартией, отредактировав текст с помощью процесса принятия решения, описанного выше. Решение о принятии измененного устава принимается путем проведения 30-дневного голосования по предложенному новому уставу. Новая хартия, в случае ее утверждения, вступает в силу либо в дату, предложенную в самой хартии, либо через 7 дней после объявления результатов выборов, в зависимости от того, что наступит позднее. Новый устав должен получить 2/3 голосов, поданных в голосовании за одобрение, чтобы быть принятым. Группа может вносить простые исправления в устав, такие как даты поставки, посредством более простого группового процесса принятия решений, а не этого процесса внесения поправок в устав. Группа будет использовать процесс внесения поправок для любых существенных изменений в целях, объеме, результатах, процессе принятия решений или правилах внесения поправок в устав.
Решение о принятии измененного устава принимается путем проведения 30-дневного голосования по предложенному новому уставу. Новая хартия, в случае ее утверждения, вступает в силу либо в дату, предложенную в самой хартии, либо через 7 дней после объявления результатов выборов, в зависимости от того, что наступит позднее. Новый устав должен получить 2/3 голосов, поданных в голосовании за одобрение, чтобы быть принятым. Группа может вносить простые исправления в устав, такие как даты поставки, посредством более простого группового процесса принятия решений, а не этого процесса внесения поправок в устав. Группа будет использовать процесс внесения поправок для любых существенных изменений в целях, объеме, результатах, процессе принятия решений или правилах внесения поправок в устав.
Ссылки
[SMP] Предложение совместного движения
- https://lists.w3.org/Archives/Public/public-web-and-tv/2014Dec/0016.html/
- https://lists.w3.org/Archives/Public/public-web-and-tv/2014Dec/0017.
 html/
html/
[MSV] Ингар М. Арнтцен, Ньол Т. Борх и Кристофер П. Нидхэм. 2013. «Вектор состояния медиа: объединяющая концепция медиа-навигации на нескольких устройствах». В материалах 5-го семинара по мобильному видео (MoVid ’13). ACM, Нью-Йорк, штат Нью-Йорк, США, 61–66.
[SYNQ] Ньол Т. Борх и Ингар М. Арнцен, «Распределенная синхронизация медиа HTML5» (15/2014), http://norut.no/nb/node/3041/
Устройства памяти, модели синхронизации и иерархические блоки
Устройства памяти, модели синхронизации и иерархические блокиИнформационный бюллетень MicroSim — апрель 1997 г.
Устройства памяти, модели синхронизации и иерархические блоки
Арнольд Мотли
Введение
Разработчики, использующие запоминающие устройства, должны быть знакомы с их настройкой и
операция. Сегодня запоминающие устройства являются неотъемлемой частью не только личного
компьютерные системы, но и многие другие электрические устройства. Эта статья будет
продемонстрировать, как настроить и смоделировать схему, использующую произвольный доступ
Устройство памяти (ОЗУ). В этой статье также показано, как включить определяемые пользователем
временные модели и симуляция, чтобы помочь получить более реалистичные результаты.
Наконец, часть схемы контроллера памяти будет преобразована в
иерархический блок, чтобы продемонстрировать полезность иерархического дизайна. Таблица 1
содержит список терминов, используемых в этой статье, и их
определения.
Эта статья будет
продемонстрировать, как настроить и смоделировать схему, использующую произвольный доступ
Устройство памяти (ОЗУ). В этой статье также показано, как включить определяемые пользователем
временные модели и симуляция, чтобы помочь получить более реалистичные результаты.
Наконец, часть схемы контроллера памяти будет преобразована в
иерархический блок, чтобы продемонстрировать полезность иерархического дизайна. Таблица 1
содержит список терминов, используемых в этой статье, и их
определения.
| Терминология | Определение |
|---|---|
| 7404 | Инвертор |
| 7408 | 2 вход И вентиль |
| 74f112 | Триггер JK |
| 74161 | 4-битный асинхронный двоичный счетчик |
| Ram8kX8break | 8-битное запоминающее устройство 64k |
| DAC8break | 8-битный цифро-аналоговый преобразователь |
| ADC8break | 8-битный аналого-цифровой преобразователь |
| мы | Линия разрешения записи устройства ОЗУ |
| повторно | Строка разрешения чтения устройства ОЗУ |
| a0-a12 | адресные строки |
| r0-r7 | чтение строк данных |
| w0-w7 | записи строк данных |
| 0000h | шестнадцатеричное значение 0 |
| 0000b | двоичное значение 0 |
| блок | иерархический блок |
| нс | наносекунд |
| мс | микросекунд |
| мс | миллисекунды |
| вп-п | размах напряжения |
Описание схемы
Рисунок 1
иллюстрирует пример того, для чего используются запоминающие устройства.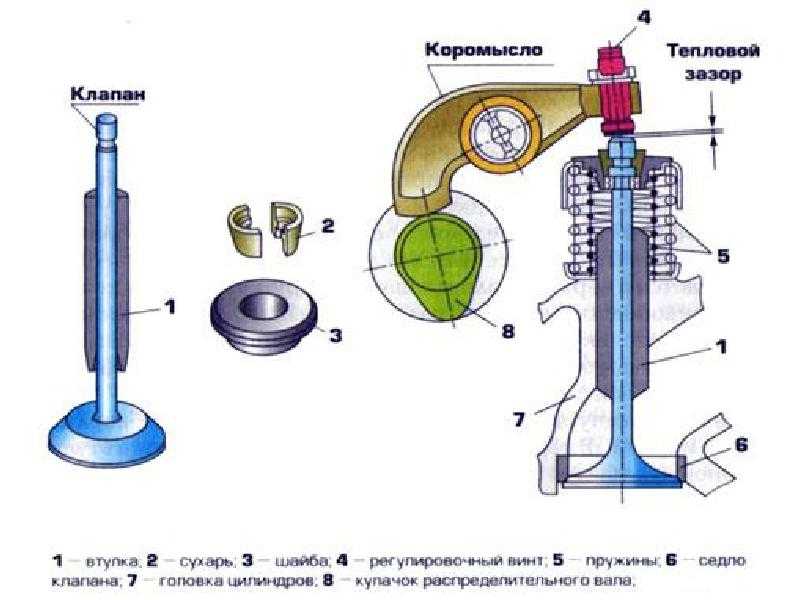 Цель
схема будет принимать 1 Гц, 1 В pp , 2,5 вольт смещения синусоида и
преобразовать его в цифровой сигнал. Затем цифровой сигнал будет записан в
Устройство RAM, которое сохранит примерно 2,5 секунды сигнала. В
В этот момент вспомогательная схема преобразует конфигурацию ОЗУ из
режим записи в режим чтения. Затем запоминающее устройство отправит сохраненные данные на
Устройство ЦАП в течение 2,5 секунд, а часть ЦАП будет преобразовывать сигнал из ОЗУ
обратно в аналоговое напряжение, которое будет падать на выходном резисторе.
частоты, рабочие циклы и временные задержки для всех источников были
рассчитывается и устанавливается для обеспечения того, чтобы часть оперативной памяти была настроена на чтение и запись
режимы цикла в нужное время.
Цель
схема будет принимать 1 Гц, 1 В pp , 2,5 вольт смещения синусоида и
преобразовать его в цифровой сигнал. Затем цифровой сигнал будет записан в
Устройство RAM, которое сохранит примерно 2,5 секунды сигнала. В
В этот момент вспомогательная схема преобразует конфигурацию ОЗУ из
режим записи в режим чтения. Затем запоминающее устройство отправит сохраненные данные на
Устройство ЦАП в течение 2,5 секунд, а часть ЦАП будет преобразовывать сигнал из ОЗУ
обратно в аналоговое напряжение, которое будет падать на выходном резисторе.
частоты, рабочие циклы и временные задержки для всех источников были
рассчитывается и устанавливается для обеспечения того, чтобы часть оперативной памяти была настроена на чтение и запись
режимы цикла в нужное время.
Рисунок 1 — Схема верхнего уровня с использованием устройств памяти (memory_1.sch)
Работа цепи
Чистый сигнал и правильное соотношение сигналов
Схема сначала преобразует аналоговый 1 Гц, 1 В p-p , 2,5 вольт
смещение синусоиды от V1 (показан в крайнем правом углу схемы) в
цифровая форма волны.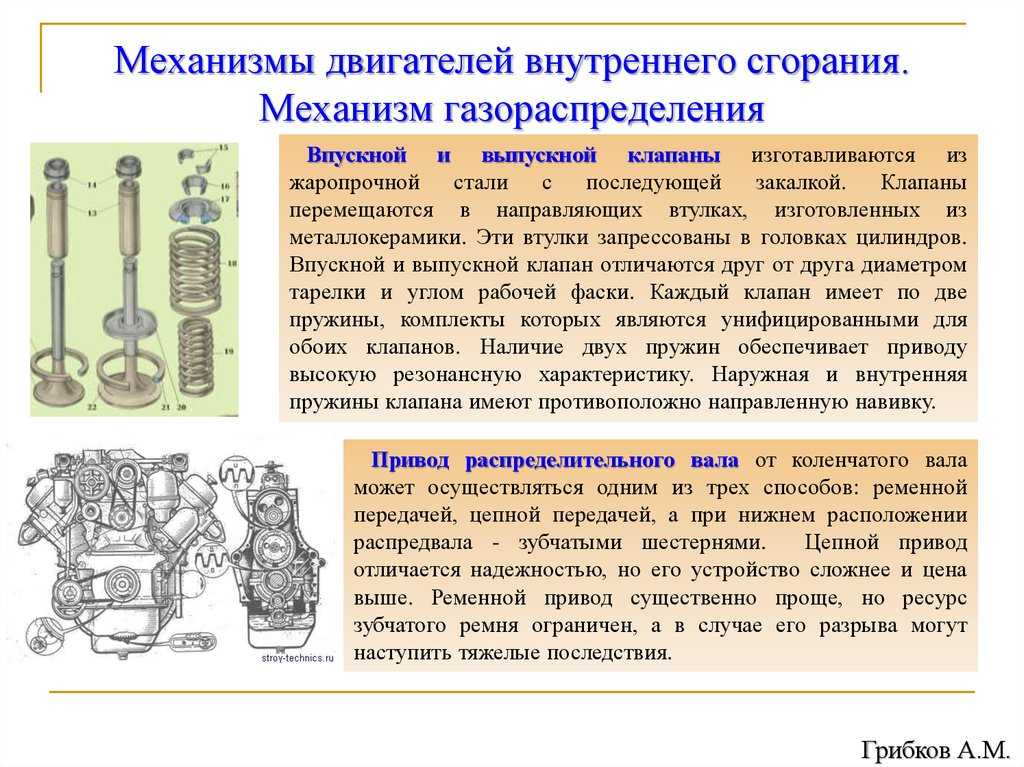 Это делается с помощью U26, части ADC8break. 8-битный цифровой
вывод U26 затем подается на входы записи ( w0-w7 * )
устройства оперативной памяти, U10.
Это делается с помощью U26, части ADC8break. 8-битный цифровой
вывод U26 затем подается на входы записи ( w0-w7 * )
устройства оперативной памяти, U10.
* имен сигналов и имен файлов будут в курсив
Чтобы настроить RAM-устройство в режиме записи (данные отправляются и сохраняются в ОЗУ), поддерживающая схема должна обеспечивать повторяющийся импульс. В последующем обсуждении будут описаны вспомогательные схемы, необходимые для выполнить это задание.
Три двоичных счетчика на рисунке
1 (U1, U2, U3) используются каскадным образом для предоставления адресных значений
для ОЗУ устройства. Четкий сигнал ( clr ) из DSTM1 используется для выполнения
две функции: он очищает три счетчика и триггеры JK (U4A, U5A,
У6А). Вторая функция, которую выполняет сигнал очистки, заключается в обеспечении
компоненты схемы находятся в известном состоянии во время включения питания. Как только ясно
сигнал сбросил счетчики, начальный адрес устанавливается в шестнадцатеричный
значение 0. Сигнал очистки также гарантирует, что логические 0 применяются к re и мы входы RAM устройства. Это удерживает устройство RAM вне
режимов чтения и записи. Это делается путем установки ре_0 и we_0 на логические 0 на входах для частей U13A и U14A.
Сигнал очистки также гарантирует, что логические 0 применяются к re и мы входы RAM устройства. Это удерживает устройство RAM вне
режимов чтения и записи. Это делается путем установки ре_0 и we_0 на логические 0 на входах для частей U13A и U14A.
После снятия сигнала сброса на оба входа
Устройство U8A. Это, в свою очередь, помещает логическую 1 на сигнал clr_1 контакта 3 на
U6A. Это позволит сигналу we_0 циклически повторяться с той же частотой, что и
сигнал clock_1 . Когда оба сигнала we_0 и cnvrt высоки, это условие будет генерировать у нас сигнал идет в ОЗУ
устройство через контакт 3 U14A. В момент генерации сигнала we это
часть аналогового сигнала, которая присутствует на линиях записи U10, будет
сохраняются в соответствующих адресных ячейках части ОЗУ. Определенный
должна быть установлена связь между адресными сигналами, данными, которые
записывается в RAM-устройство, и мы сигнализируем.
Сигналы адресной линии, идущие на микросхему ОЗУ, сначала помещаются в стабильную состояние, затем устанавливаются поступающие данные, и, наконец, сигнал мы утверждал. Как только поступающие данные записываются, три сигнала удаляются из порядке, обратном их применению. Другими словами, а1 адрес линейный импульс должен инкапсулировать импульс we, в то время как строки записи w0-w7 стабилен во время операции записи. Если эта связь сохраняется, не должно быть ошибок. Строка a0 установлена на постоянный логический 0 потому что у счетчиков двенадцать адресных строк, а у части ОЗУ тринадцать адресные строки. Как вспомогательная логика генерирует импульсы we , а затем переключает оперативную память в режим чтения.
Поддерживающая логика
Сигнал clock_in подается на контакты clk трех счетчиков.
и триггеры JK. Время задержки для сигнала clock_in установлено на
0,2 мс. Это обеспечивает начальную точку опорного времени для цепи. Высота
время для сигнала clock_in было установлено на 0,28125 мс, а минимальное время было
также установлено на 0,28125 мс. Это обеспечивает период 0,5625 мс для часы_вход сигнал. Время цикла для счетчика U1 в два раза больше clock_in период или 1,125 мс. Когда U1 переключается на 1111b, он сбрасывается на
двоичное значение 0000b и высокий импульс обеспечиваются на линии rco1 .
Это заставляет U2 считать на единицу. Этот процесс продолжается до тех пор, пока U2 не подсчитает и
сбрасывается, и на линии rco2 генерируется высокий импульс. Когда U3 сбрасывается на
0000b от 1111b, линия тумблера подаст высокий импульс на входы JK
U4A. Это приведет к Q Выход U4A для переключения с логического 0 на
логика 1.
Высота
время для сигнала clock_in было установлено на 0,28125 мс, а минимальное время было
также установлено на 0,28125 мс. Это обеспечивает период 0,5625 мс для часы_вход сигнал. Время цикла для счетчика U1 в два раза больше clock_in период или 1,125 мс. Когда U1 переключается на 1111b, он сбрасывается на
двоичное значение 0000b и высокий импульс обеспечиваются на линии rco1 .
Это заставляет U2 считать на единицу. Этот процесс продолжается до тех пор, пока U2 не подсчитает и
сбрасывается, и на линии rco2 генерируется высокий импульс. Когда U3 сбрасывается на
0000b от 1111b, линия тумблера подаст высокий импульс на входы JK
U4A. Это приведет к Q Выход U4A для переключения с логического 0 на
логика 1.
После сигнала сброса и до первого импульса переключения от U3 ОЗУ
часть будет в режиме записи. Так как вход номер 2 U8A был установлен на логическую
1 после снятия сигнала сброса логическая 1 на входе числа 1 контакт установит сигнал clr_1 на контакте 3 U8A в логическую 1. Это удалит
чистый сигнал с вывода № 15 триггера U6A JK. С высоким
сигнал снят с контакта 1 U8A, а входы JK U6A помещены в логическую 1, Q вывод U6A, we_0 , будет циклически повторяться каждые clock_1 пульс от V7.
Это удалит
чистый сигнал с вывода № 15 триггера U6A JK. С высоким
сигнал снят с контакта 1 U8A, а входы JK U6A помещены в логическую 1, Q вывод U6A, we_0 , будет циклически повторяться каждые clock_1 пульс от V7.
Временная задержка V7 была установлена на 0,4 мс, чтобы обеспечить запуск и удаление сигнала очистки и обеспечить синхронизацию сигнала clock_1 с сигналом адрес и линии данных U10. Максимальное время для сигнала clock_1 равно 1. мс, а низкое время равно 35 мс, что обеспечивает период 36 мс. мы_0 сигнал будет отражением clock_1 сигнал, и он будет отправлен на номер 1 вход У14А. Сигнал на входе номер 2 U14A: сигнал cnvrt .
Сигнал cnvrt имеет время задержки 0,4 мс. Это также самое время
0,05 мс и минимальное время 35,95 мс. Это обеспечивает период 36 мс для cnvrt сигнал. Верхняя часть сигнала cnvrt настроена на
происходят, когда clock_1 9Сигнал 0177 высокий.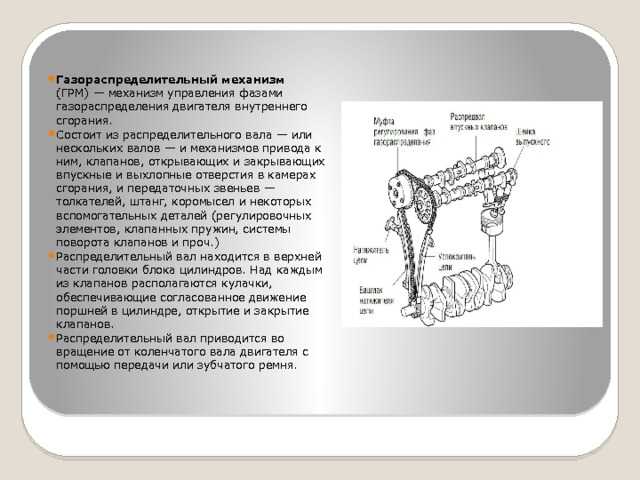 Эти два сигнала генерируют у нас сигнал на выводе 3 U14A. Каждый раз, когда сигнал we высокий, он
помещает часть оперативной памяти в режим записи. В этот момент данные в строке записи
сигналы, w0-w7 , будут отправлены на адрес, выбранный в
в этот раз по трем счетчикам.
Эти два сигнала генерируют у нас сигнал на выводе 3 U14A. Каждый раз, когда сигнал we высокий, он
помещает часть оперативной памяти в режим записи. В этот момент данные в строке записи
сигналы, w0-w7 , будут отправлены на адрес, выбранный в
в этот раз по трем счетчикам.
Вспомогательная логика также обеспечивает этот периодический мы сигнал для приблизительно 2,5 секунды. Чтобы рассчитать общее время периодического we и re сигнализирует, что использовалось следующее уравнение:
= (высокое время для clock_1 x 2 x 2 12 + 0,2) секунды
= (0,28125 мс x 2 x 2 12 + 0,2) секунды
= 2,504 секунды Максимальное время для сигнала clock_1 умножается на 2 для учета
весь период. Затем период умножается на время, необходимое для всех трех
часы для циклического прохождения и генерации переключение импульс на RCO контакт U3. Чтобы рассчитать время, необходимое для переключения U1, U2 и U3 RCO линий использовалась формула a b . Где а — количество возможных
состояния сигнала на линию, в данном случае два, либо логическая 1, либо логический 0.
количество выходов счетчика, четыре для каждого двоичного счетчика, что дает общее
из двенадцати. Мы добавляем 0,2 из-за временной задержки сигнала clr .
Где а — количество возможных
состояния сигнала на линию, в данном случае два, либо логическая 1, либо логический 0.
количество выходов счетчика, четыре для каждого двоичного счетчика, что дает общее
из двенадцати. Мы добавляем 0,2 из-за временной задержки сигнала clr .
Пока доступно временное окно для генерации у нас сигнал 2.504 секунд, фактическое утверждение сигнала мы будет отражением сигнал cnvrt . Это означает, что серия импульсов we будет примерно 0,05 мс в ширину и происходят каждые 36 мс в течение 2,504 секунды. окно. Формы сигналов, показанные на рисунке 2 показаны отношения между clock_in, clock, rco1, rco2, clr_1, clock_1, we_0, cnvrt, we и переключают сигнал .
Рисунок 2 — Отношения между часами и переключающим сигналом.
После 2.504
секунды, сигнал toggle от U3 утверждается, и это
изменяет выход Q на U4A с логического 0 на логическую 1. Это помещает
Оперативное устройство в режиме чтения. Весь процесс создания мы сигнал сменяется повторным сигналом еще на 2,504 секунды. После первого переключение импульса , три счетчика сбрасываются на 0 для подготовки чтения
цикл. Это возвращает адресные строки к их адресу 0000h. Как о сигнал генерируется аналогично сигналу we , ОЗУ
устройство помещает данные, хранящиеся в его памяти, на входы U11, DAC8break
часть. Источник V5 на опорном входе ( REF ) ЦАП обеспечивает
максимальный уровень опорного напряжения для выходного сигнала на резисторе R1 .
Входной аналоговый сигнал от V1 и аналоговый выходной сигнал напряжения на R1
показаны на рисунке
3. Как показано на рис. 3, часть ОЗУ действительно сохраняла, а затем вызывала синусоидальный сигнал.
волновой сигнал.
Весь процесс создания мы сигнал сменяется повторным сигналом еще на 2,504 секунды. После первого переключение импульса , три счетчика сбрасываются на 0 для подготовки чтения
цикл. Это возвращает адресные строки к их адресу 0000h. Как о сигнал генерируется аналогично сигналу we , ОЗУ
устройство помещает данные, хранящиеся в его памяти, на входы U11, DAC8break
часть. Источник V5 на опорном входе ( REF ) ЦАП обеспечивает
максимальный уровень опорного напряжения для выходного сигнала на резисторе R1 .
Входной аналоговый сигнал от V1 и аналоговый выходной сигнал напряжения на R1
показаны на рисунке
3. Как показано на рис. 3, часть ОЗУ действительно сохраняла, а затем вызывала синусоидальный сигнал.
волновой сигнал.
Рисунок 3 — Входной аналоговый сигнал от V1 и аналоговый выходной сигнал напряжения на R1.
Временной анализ
Хотя эта схема показывает, как можно смоделировать запоминающее устройство с помощью MicroSim.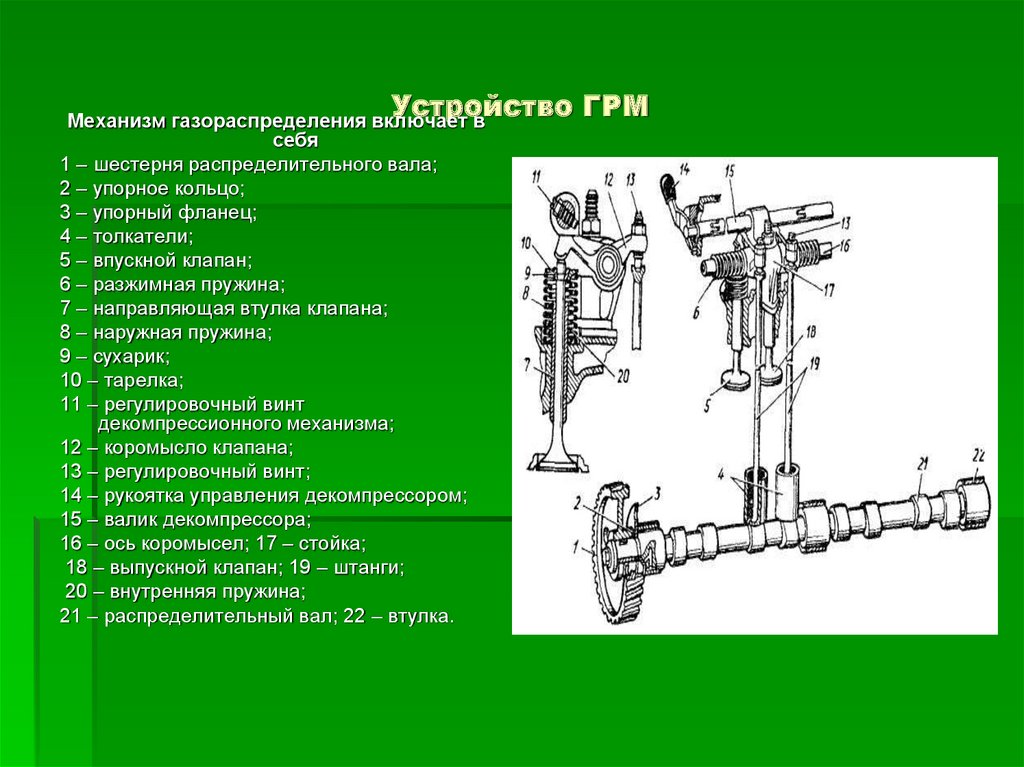 PSpice, это не совсем точно. Один из аспектов успешного моделирования
были опущены: время, связанное с каждым устройством в цепи. В других
словами, до этого момента схема и выходные сигналы отражают
идеальная схема без задержек распространения или других включенных временных параметров.
В этом разделе будет продемонстрировано, как временные параметры, такие как задержки распространения,
можно добавить время настройки и время удержания, чтобы симуляция реагировала более
реальная цепь. Также ошибка будет помещена в временные параметры на
целью показать, как MicroSim PSpice обнаруживает и указывает на такого рода проблемы.
Хотя MicroSim PSpice имеет возможность моделировать многие временные
параметры, связанные с логическими устройствами, только некоторые параметры будут
используется для каждого устройства в этой статье для краткости. Библиотека MicroSim
«dig_io.lib» содержит полные временные параметры для своих моделей. Эти
параметры были взяты из справочника TI.
PSpice, это не совсем точно. Один из аспектов успешного моделирования
были опущены: время, связанное с каждым устройством в цепи. В других
словами, до этого момента схема и выходные сигналы отражают
идеальная схема без задержек распространения или других включенных временных параметров.
В этом разделе будет продемонстрировано, как временные параметры, такие как задержки распространения,
можно добавить время настройки и время удержания, чтобы симуляция реагировала более
реальная цепь. Также ошибка будет помещена в временные параметры на
целью показать, как MicroSim PSpice обнаруживает и указывает на такого рода проблемы.
Хотя MicroSim PSpice имеет возможность моделировать многие временные
параметры, связанные с логическими устройствами, только некоторые параметры будут
используется для каждого устройства в этой статье для краткости. Библиотека MicroSim
«dig_io.lib» содержит полные временные параметры для своих моделей. Эти
параметры были взяты из справочника TI.
Первым шагом для изменения значений синхронизации является получение задержки распространения
значения из книги логических данных. MicroSim PSpice исключит временные параметры для
минимальные (MN), типовые (TY) и максимальные (MX) значения для каждого устройства. Один раз
все эти значения были добавлены в модель детали, которую предоставляет MicroSim PSpice.
возможность запускать все компоненты в цепи на их MN, TY,
или значения MX. Если определенная часть или несколько различных частей требуют, чтобы их
временные параметры моделируются на уровне, отличном от глобальных настроек,
затем эти параметры можно установить, дважды щелкнув деталь и введя
значение 1, 2 или 3 в строке атрибута «MNTYMXDLY». Эта функция будет
обсуждается далее в этой статье.
MicroSim PSpice исключит временные параметры для
минимальные (MN), типовые (TY) и максимальные (MX) значения для каждого устройства. Один раз
все эти значения были добавлены в модель детали, которую предоставляет MicroSim PSpice.
возможность запускать все компоненты в цепи на их MN, TY,
или значения MX. Если определенная часть или несколько различных частей требуют, чтобы их
временные параметры моделируются на уровне, отличном от глобальных настроек,
затем эти параметры можно установить, дважды щелкнув деталь и введя
значение 1, 2 или 3 в строке атрибута «MNTYMXDLY». Эта функция будет
обсуждается далее в этой статье.
| Часть | Параметр | Описание | МН | ТУ | МХ |
|---|---|---|---|---|---|
| ре74Ф04 | тплх | задержка распространения от низкого до высокого | 2,4 нс | 3,7 нс | 5нс |
| тфхл | задержка распространения от высокого к низкому | 1,5 нс | 3,2 нс | 4,3 нс | |
| 74F08 | тплх | задержка распространения как высокая | 3нс | 4,2 нс | 5,6 нс |
| тфхл | задержка распространения от высокого к низкому | 2,5 нс | 4нс | 5,3 нс | |
| 74F112 | thdclk | время удержания JK после часов | 0 | 0 | 0 |
| tpclkqlh | время задержки от фронта часов до q от низкого до высокого | 2нс | 5нс | 6,5 нс | |
| тпклкхл | привязать фронт тактового сигнала задержки к q от высокого к низкому | 2нс | 5нс | 6,5 нс | |
| цудклк | время установки JK на часы | 4нс | 4нс | 4 нс | |
| DAC8break | тв | изменение времени переключения данных на аналоговый выход стабильный | 0,8 мс | 1,6 мс | 2,5 мс |
| RAM8Kxbreak | тпадх | адрес задержки для чтения пакета данных до высокого | 2,9 нс | 3,7 нс | 4,2 нс |
| тпадл | адрес задержки для чтения данных с высокого на низкий | 2,6 нс | 3,1 нс | 3,7 нс | |
| цуаев | минимальное время установки адреса для разрешения записи | 2,3 нс | 3нс | 3,6 нс |
В таблице 2 приведено описание параметры, используемые при моделировании, и значение, которое использовалось для каждого из них.
 значения в столбцах MN, TY и MX добавляются к операторам модели
отдельные части, чтобы добавить эти пользовательские временные интервалы
параметры в моделировании. Определение для модели 74F08 до
добавлены пользовательские временные параметры:
значения в столбцах MN, TY и MX добавляются к операторам модели
отдельные части, чтобы добавить эти пользовательские временные интервалы
параметры в моделировании. Определение для модели 74F08 до
добавлены пользовательские временные параметры: .subct 74F08-X A B Y
+ необязательно: DPWR=$G_DPWR DGND=$G_DGND
+ параметры: MNTYMXDLY=0 IO_LEVEL=0
U1 и (2) DPWR DGND
+ А Б Я
+ D_F08 IO_F MNTYMXDLY={MNTYMXDLY}
IO_LEVEL={IO_LEVEL}
.ends |
Следующие параметры синхронизации были добавлены перед .ends
выписка:
.модель D_F08 угате * Задержка распространения от низкой до высокой + tplhmn=3n tplhty=4,2n tplhmx=5,6n *Задержка распространения от высокой к низкой + tphlmn=2,5n tphlty=4n tphlmx=5,3n |
Перед оператором «.ends» было добавлено «. model D_F08-X ugate».
D_F08-X — это название модели (как показано в первом определении), и обычно
перечислены прямо перед названием модели ввода/вывода. Ugate описывает тип ворот. За
например, низкоуровневые цифровые устройства, такие как вентили, используют тип «ugate». Если
часть была JK Flip-Flop, тогда тип ворот был бы «ueff», как описано
ниже.
model D_F08-X ugate».
D_F08-X — это название модели (как показано в первом определении), и обычно
перечислены прямо перед названием модели ввода/вывода. Ugate описывает тип ворот. За
например, низкоуровневые цифровые устройства, такие как вентили, используют тип «ugate». Если
часть была JK Flip-Flop, тогда тип ворот был бы «ueff», как описано
ниже.
Добавлено примечание для описания первого набора времени. параметры. Для создания ремарки в начале ставится звездочка линии. Он гласит: «Задержка распространения от низкого до высокого», а минимум, типичны, и указаны максимальные значения. За этой строкой идет другая замечание, и параметры задержки распространения от высокого к низкому перечислены. Наконец, оператор «.ends» завершает ввод модели. Ниже временная модель триггеров JK, используемых в схеме:
.subckt 74F112-X CLK PREBAR CLRBAR J K Q QBAR
+ необязательно: DPWR=$G_DPWR DGND=$G_DGND
+ параметры: MNTYMXDLY=0 IO_LEVEL=0
UBUF bufa(2) DPWR DGND
+ J K J_BUF K_BUF
+ D0_GATE IO_F IO_LEVEL={IO_LEVEL}
UB1 буфа(2) DPWR DGND
+ J_BUF K_BUF J1 K1
+ D_F112_1 IO_F MNTYMXDLY={MNTYMXDLY}
UB2 буфа(2) DPWR DGND
+ J_BUF K_BUF J1 K1
+ D0_GATE IO_F
U1 jkff(1) DPWR DGND
+ ПРЕДВАРИТЕЛЬНЫЙ CLRBAR CLK J1 K1 Q QBAR
+ D_F112_2 IO_F MNTYMXDLY={MNTYMXDLY}
IO_LEVEL={IO_LEVEL}
. |
 модель D_F112_2 ueff
*Время удержания для JK после часов
+ thdclkmn=0 thdclkty=0 thdclkmx=0
* Время задержки от фронта часов до q от низкого до высокого
+ tpclkqlhmn=2n tpclkqlhty=5n tpclkqlhmx=6.5n
*Время задержки от фронта часов до q от высокого до низкого
+ tpclkqhlmn=2n tpclkqhlty=5n tpclkqhlmx=6.5n
*Время установки JK на клик
+ tsudclkmn=4n tsudclkty=4n tsudclkmx=4n
.концы
модель D_F112_2 ueff
*Время удержания для JK после часов
+ thdclkmn=0 thdclkty=0 thdclkmx=0
* Время задержки от фронта часов до q от низкого до высокого
+ tpclkqlhmn=2n tpclkqlhty=5n tpclkqlhmx=6.5n
*Время задержки от фронта часов до q от высокого до низкого
+ tpclkqhlmn=2n tpclkqhlty=5n tpclkqhlmx=6.5n
*Время установки JK на клик
+ tsudclkmn=4n tsudclkty=4n tsudclkmx=4n
.концы
Аналогичные временные записи сделаны для остальных устройств. Счетчики
не было добавлено моделей синхронизации, поскольку счетчик в основном моделируется с помощью
триггеры и логические элементы, и эти типы были показаны.
Минимальные, типичные и максимальные значения были добавлены для каждого временного интервала.
моделей и должны быть выбраны в диалоговом окне Digital Options. Чтобы установить эти
значений, в MicroSim Schematics выберите Analysis/Setup, затем нажмите Digital
Настраивать. Будут показаны три варианта: режим синхронизации, аналого-цифровой интерфейс по умолчанию и
Инициализация триггера. В подокне Timing Mode есть четыре опции:
Минимум, Типичный, Максимум, Наихудший случай (Мин/Макс).
В подокне Timing Mode есть четыре опции:
Минимум, Типичный, Максимум, Наихудший случай (Мин/Макс).
Параметр, выбранный в окне Timing Mode, устанавливает глобальное время для схема. Например, если было выбрано типичное значение 2, то все устройства, которые имели временные параметры в своих моделях, будут иметь эти параметры установить типовые значения. Если по какой-то причине дизайнер хотел бы иметь глобальный параметр, установленный для «типичного» значения, но хотелось бы одно конкретное части или группе деталей, установленных на максимальные значения, это условие также может быть смоделированный. Чтобы установить время для отдельных устройств на значение, отличное от значение глобальной настройки, значение «MNTYMXDLY» в окне атрибутов отдельное устройство должно быть установлено на желаемую настройку.
Значение 1 означает минимальное значение, значение 2 означает типичный
значение, а значение 3 означает максимальное значение. Пока устройство имеет
временной модели, значение «MNTYMXDLY» для этого устройства может быть установлено равным
значение, отличное от глобальной настройки.
Поскольку все временные параметры в схеме имеют значения s или ms, а тактовая частота указана в нс, расхождений во времени не было. Чтобы показать как MicroSim PSpice обнаруживает и сообщает о расхождениях во времени, один из параметры были изменены, чтобы создать временную опасность. Изменение «thdclk» параметр (который представляет собой время удержания JK после часов) для части U4A из От 0 до 1 с создает опасность синхронизации.
После моделирования MicroSim PSpice уведомляет о наличии цифрового предупреждения. произошел. Выходной файл включает установленные и измеренные значения для предупреждения. параметр (показан ниже). В этом случае измеренное значение составило 19,8 нс, а установлено значение 1 с.
ЦИФРОВОЙ ИДЕНТИФИКАТОР сообщения №1 (предупреждение) HOLD Нарушение во время 2.5036062767 с Устройство: X_U4A.U1 Часы: clock_bar Дж: X_U4A.JI Минимальный THDCLK = 1 с Измеренное удержание J/CLOCK = 19. |
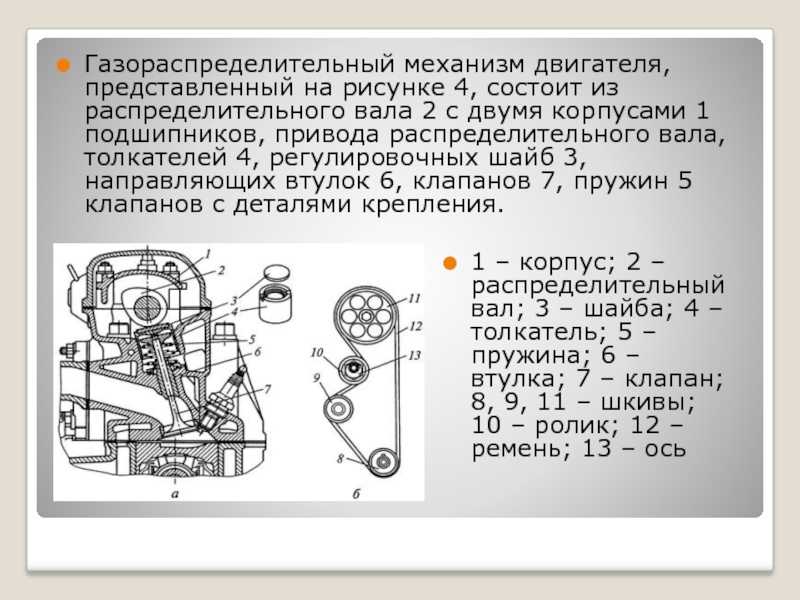 8нс
8нс Преимущества иерархического дизайна
На данный момент схема работает по плану, но взгляните на схему на рисунке 1 показывает, что здесь достаточно логики для понимания. Схемы с более сложные функции и дизайн компонентов потребовали бы еще больше времени потребляет, чтобы понять. Чтобы преодолеть эту проблему, дизайнер может реализовать иерархический дизайн. В этом разделе схема на рисунке 1 будет уменьшен за счет объединения нескольких компонентов в иерархическую блокировать.
Иерархические блоки — это компоненты, обеспечивающие все функции цепи, которые они заменяют. Например, на рисунке 1, все компоненты слева от части оперативной памяти можно назвать контроллер памяти. Для проектной схемы верхнего уровня контроллер памяти может быть представлена одной частью.
Чтобы запустить этот процесс, копия раздела контроллера памяти схемы
на рисунке
1 создается с помощью функции копирования и вставки в MicroSim Schematics. Далее четыре источника: DSTM1, DSTM2, V7 и cnvrt удалены
с копии контроллера памяти. Это сделано потому, что так проще
изменить исходные параметры, когда они находятся на нижнем уровне. Если бы они были
оставлены в иерархическом блоке, не было бы возможности настроить их работу
условиях, если дизайнер не толкнул внутрь блока.
Далее четыре источника: DSTM1, DSTM2, V7 и cnvrt удалены
с копии контроллера памяти. Это сделано потому, что так проще
изменить исходные параметры, когда они находятся на нижнем уровне. Если бы они были
оставлены в иерархическом блоке, не было бы возможности настроить их работу
условиях, если дизайнер не толкнул внутрь блока.
После удаления источников копия этой части схемы который войдет в иерархический блок, затем сохраняется как inside_1.sch (Фигура 4). Следующим шагом в процедуре является создание иерархического блока. Этот выполняется либо щелчком по значку на панели инструментов, либо выбором пункта «Блокировать» в Меню рисования. Окно предложит пользователю указать схему для ссылки, в этом case inside_1.sch вводится . Как только блок установлен, файл сохранен как package_1.sch.
Рисунок 4 — Иерархический блок «inside_1.sch»
Необходимо создать ссылку
между цепью внутри блока и цепью вне блока. Этот
осуществляется иерархическими блочными штифтами. Пины на левой стороне
блок считается входом, а контакты с правой стороны блока
выходные контакты. Чтобы разместить количество выходных контактов, блок, используемый в этом
дизайн пришлось увеличить. Это было сделано с помощью следующей серии
команды:
Пины на левой стороне
блок считается входом, а контакты с правой стороны блока
выходные контакты. Чтобы разместить количество выходных контактов, блок, используемый в этом
дизайн пришлось увеличить. Это было сделано с помощью следующей серии
команды:
- Нажмите на иерархический блок, чтобы выделить его,
- Удерживайте клавишу Shift,
- Щелкните правой кнопкой мыши и переместите ее, чтобы создать новый желаемый размер для иерархический блок.
Теперь, когда размер блока изменен, необходимо разместить штифты для блока.
В основном каждая сигнальная линия, которая должна идти изнутри наружу
блок должен иметь булавку на иерархическом блоке. В этом случае каждый из
тринадцать адресных линий, идущих к запоминающему устройству, должны иметь контакт, а также
четыре исходных контакта. Чтобы создать выводы на уровне блока, необходимо создать новый провод.
начинается там, где новый штифт будет размещен на блоке. Проволока нарисована такая
что он заканчивается на блоке.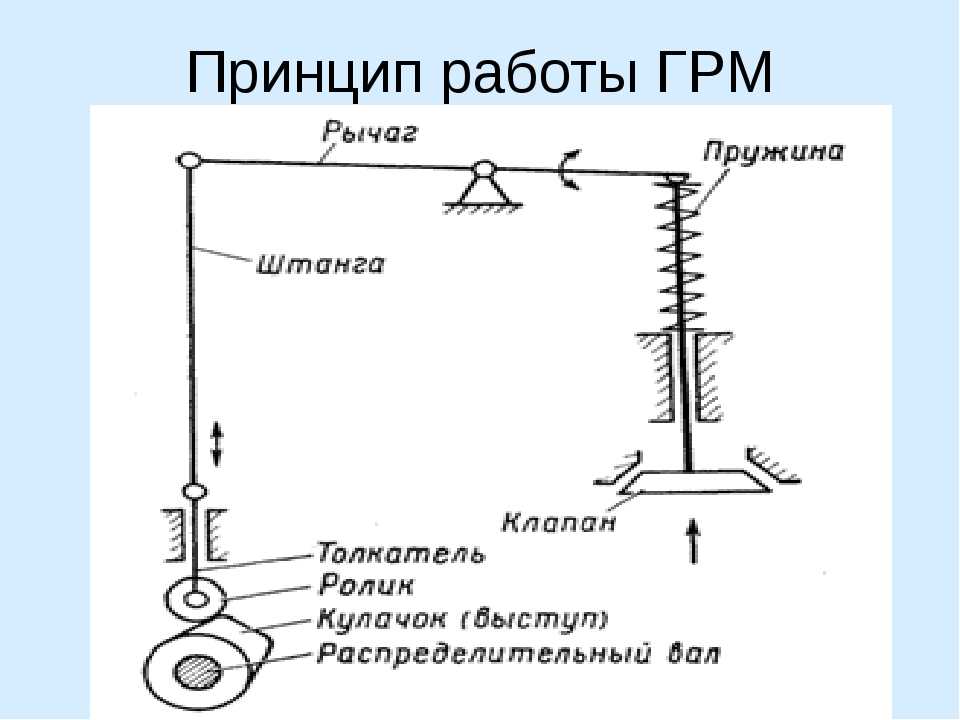 Пин создается автоматически (и нумеруется
где провод встречается с блоком). Контакты могут быть перенумерованы или переименованы
дважды щелкнув булавку, а затем введя изменение. Пины Р1 через P19 (Рисунок
5) были созданы таким образом. Это создает ссылку снаружи
блок, а чтобы создать ссылку для схемы внутри блока,
должен использоваться интерфейсный порт.
Пин создается автоматически (и нумеруется
где провод встречается с блоком). Контакты могут быть перенумерованы или переименованы
дважды щелкнув булавку, а затем введя изменение. Пины Р1 через P19 (Рисунок
5) были созданы таким образом. Это создает ссылку снаружи
блок, а чтобы создать ссылку для схемы внутри блока,
должен использоваться интерфейсный порт.
Рисунок 5 — схема final_1.sch
Для создания ссылки внутри блок, выделите блок, а затем нажмите F2 или выберите Push из Перейдите в меню, чтобы нажать на блок. Затем «интерфейсный» порт размещается на каждом линия, которая будет выходить за пределы блока. После того, как интерфейсные порты размещены внутри блока, их метки должны быть изменены, чтобы отразить соответствующие имена контактов, которые находятся на уровне блока. Схема на рисунке 4, inside_1.sch, показывает схему, содержащуюся внутри блока.
Как только иерархический блок завершен как внутри, так и снаружи, блок может
использоваться любой схемой, как если бы это была еще одна часть MicroSim PSpice
библиотека. Например раздел контроллера памяти скопирован с оригинала
схема на рисунке
1 (не включая четыре источника). Затем блок контроллера памяти
скопировано из package_1.sch в новый файл с именем final_1.sch .
Остальная часть исходной схемы, которая включает часть ОЗУ, ЦАП и
АЦП также копируются в файл final_1.sch .
Например раздел контроллера памяти скопирован с оригинала
схема на рисунке
1 (не включая четыре источника). Затем блок контроллера памяти
скопировано из package_1.sch в новый файл с именем final_1.sch .
Остальная часть исходной схемы, которая включает часть ОЗУ, ЦАП и
АЦП также копируются в файл final_1.sch .
Схема final_1.sch показана на рисунке 5. Обратите внимание, что источники напряжения были повторно подключены к левой стороне блок. Если теперь смоделировать схему final_1.sch , результаты будут быть такими же, как результаты схемы memory_1.sch . Как иерархический блок упрощает внешний вид схемы и облегчает ее следовать можно увидеть, когда final_1.sch схема сравнивается с memory_1.sch . Иерархические блоки могут включать столько немного схемы по желанию.
Иерархический блок уменьшил исходную схему примерно с 17
компонентов до примерно пяти компонентов, но исходная функция остается
такой же.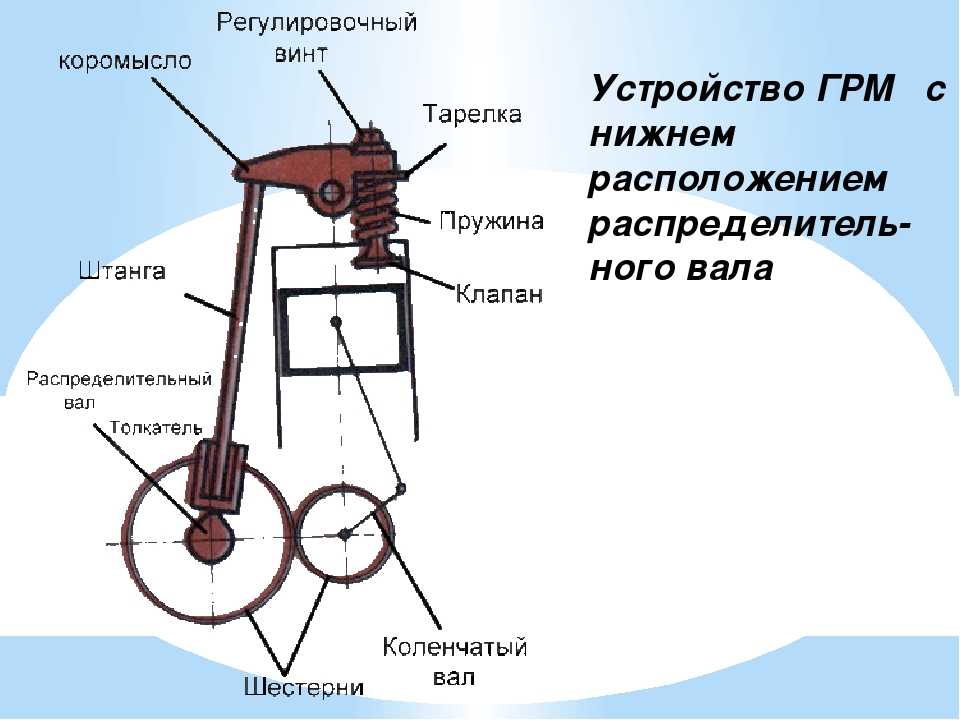 Этот блок также может быть преобразован в постоянный символ, который будет
разрешить этому дизайну или другим проектам доступ к нему непосредственно из библиотеки в
так же, как и другие компоненты библиотеки.
Этот блок также может быть преобразован в постоянный символ, который будет
разрешить этому дизайну или другим проектам доступ к нему непосредственно из библиотеки в
так же, как и другие компоненты библиотеки.
В этой статье показано несколько полезных примеров того, как использовать запоминающие устройства, как включить временные модели и как использовать иерархические блоки.
Биография:
Арнольд Мотли работает в компьютерной компании в Северной
Каролина. Он живет там со своей женой Ивонн и тремя детьми.
Группа сообщества синхронизации нескольких устройств
Механизмы синхронизации позволяют выполнять операции в нужное время. В Интернете уже есть несколько механизмов, поддерживающих синхронизированные операции, в том числе setTimeout и setInterval, а также контроллеры для медиа-фреймворков и анимации. Однако в Интернете отсутствует поддержка синхронизации нескольких устройств. Механизм синхронизации с несколькими устройствами позволил бы синхронизировать операции на веб-страницах, размещенных на разных устройствах. Синхронизация нескольких устройств особенно важна для индустрии вещания, поскольку она является ключевым фактором, позволяющим предлагать вторичные веб-устройства. В более общем плане синхронизация с несколькими устройствами имеет широкое применение в общении, совместной работе и многоэкранных презентациях. Эта группа сообщества стремится определить общий механизм синхронизации для нескольких устройств и практическую модель программирования. Это улучшит Интернет как платформу для чувствительных ко времени веб-приложений для нескольких устройств. Устав: http://webtiming.github.io
Механизм синхронизации с несколькими устройствами позволил бы синхронизировать операции на веб-страницах, размещенных на разных устройствах. Синхронизация нескольких устройств особенно важна для индустрии вещания, поскольку она является ключевым фактором, позволяющим предлагать вторичные веб-устройства. В более общем плане синхронизация с несколькими устройствами имеет широкое применение в общении, совместной работе и многоэкранных презентациях. Эта группа сообщества стремится определить общий механизм синхронизации для нескольких устройств и практическую модель программирования. Это улучшит Интернет как платформу для чувствительных ко времени веб-приложений для нескольких устройств. Устав: http://webtiming.github.io
webtiming
Общедоступная электронная почта, репозиторий и вики-активность группы с течением временичерновики / информация о лицензии
| имя |
|---|
| Проект спецификации объекта синхронизации |
Председатели, войдя в систему, могут публиковать проекты и окончательные отчеты. Пожалуйста, ознакомьтесь с требованиями к отчету.
Пожалуйста, ознакомьтесь с требованиями к отчету.
Публикация отчетов
Ингар Арнцен | Опубликовано:
Забавное использование объектов синхронизации, секвенсоров и общего движения для синхронизации тысячи мобильных телефонов, чтобы стать частью шоу. Сделано старшеклассником Дэвидом Макаллистером для мероприятия в старшей школе в Калифорнии. Хорошая работа Дэвид!
Насколько нам известно, это может быть крупнейшее в мире событие, синхронизируемое через Интернет, на сегодняшний день, что тоже довольно круто!
Комментариев нет | | КатегорияИнгар Арнцен | Опубликовано:
Привет всем.
Кристоф Гуттандин представил доклад о Timing Object под названием «The Timing Object, задающий ритм Интернету» на конференции Web Audio Conf (2018) в Берлине. Он также написал статью на ту же тему, что и презентация. Вы найдете презентацию (видео) в статье.
Отличная работа Кристоф.
Кристоф также любезно согласился поделиться некоторыми отзывами, которые он получил от веб-разработчиков на конференции, в следующем посте.
Вы можете ознакомиться с другими его работами на https://media-codings.com/
Комментариев нет | | Категория ОбъявленияИнгар Арнцен | Опубликовано:
Привет всем.
Ньол и я собираемся в IBC в этом году (4 дня, с пятницы по понедельник). Пожалуйста, свяжитесь с нами, если вы хотите встретиться, или просто подойдите к нашему стенду (Media City Bergen – 8.D10).
На IBC мы будем представлять
- Norut (интерес: партнерство в европейском исследовательском сотрудничестве в области медиа, в частности, дальнейшее исследование широких возможностей, открывших использование объектов синхронизации и совместного движения (т. е. глобальное время, синхронизация и управление медиа в медиа-системах)
- Motion Corporation (интерес: коммерческое использование общего движения)
- W3C Multi-device Timing CG (интерес: веб-стандартизация синхронизации, синхронизации и управления мультимедиа, т. е. объект синхронизации)
Мы также проведем несколько презентаций о коммерческих возможностях, открываемых глобальной синхронизацией, синхронизацией и контролем мультимедиа. Вот несколько тизеров:
Цифровая вывеска с капелькой магии (8.D10 – пятница, 15.00)
В мире, где большие экраны доступны во многих общественных местах, появляется огромное количество возможностей, если мы можем ограничить сложность, но обеспечить гибкость. Волны рекламы следуют за конвейерными лентами в аэропортах? Взаимодействие между телефонами людей и набором экранов или даже физическими объектами? Получить звуковую дорожку развлечения в поезде на свой смартфон? Создание привлекательного впечатления от просмотра с синхронизированным звуком и видео на нескольких экранах и устройствах кажется непреодолимой задачей. В этом докладе мы обсудим, как можно использовать наш веб-механизм и инструменты синхронизации, чтобы дать волю своим творческим людям, не беспокоя при этом бухгалтеров.
Волны рекламы следуют за конвейерными лентами в аэропортах? Взаимодействие между телефонами людей и набором экранов или даже физическими объектами? Получить звуковую дорожку развлечения в поезде на свой смартфон? Создание привлекательного впечатления от просмотра с синхронизированным звуком и видео на нескольких экранах и устройствах кажется непреодолимой задачей. В этом докладе мы обсудим, как можно использовать наш веб-механизм и инструменты синхронизации, чтобы дать волю своим творческим людям, не беспокоя при этом бухгалтеров.
Доступность превыше всего (8.D10 – суббота, 13.00)
Создание контента, доступного для всех, может показаться трудным, дорогостоящим и технически сложным. Как мы можем создать доступный и настраиваемый опыт, не мешая другим зрителям? Нужно ли нам смотреть телевизор в одиночестве, чтобы получить правильную адаптацию? На этом занятии мы обсудим эксперимент с норвежской общественной телекомпанией NRK и то, как мы за два дня создали самый совершенный демонстратор специальных возможностей из когда-либо созданных. Посмотрите, как мы адаптировали часть оригинального контента к личным потребностям, используя самое личное из устройств: собственный мобильный телефон.
Посмотрите, как мы адаптировали часть оригинального контента к личным потребностям, используя самое личное из устройств: собственный мобильный телефон.
F1TV, вершина покрытия OTT (8.D10 – воскресенье 13.00)
Формула-1 — это вершина автоспорта, и, вероятно, она привлекает самых заинтересованных в технологиях зрителей в мире. F1TV — это новое OTT-предложение от Формулы-1, открывающее шлюзы аудио, видео и статистики для самых активных болельщиков. На этом занятии мы обсудим некоторые удивительные возможности для будущего спортивного освещения. Теперь сверхперсонализированные впечатления, совместный просмотр и невероятно гибкие многоэкранные решения могут быть доступны с минимальными инвестициями и техническими сложностями.
Экстренные службы работают в нескольких направлениях (8.D10 – понедельник 13.00)
Эксперимент по освещению спортивных событий любительской камерой нашел применение в реальном мире. В этом выступлении мы покажем и расскажем, как пожарно-спасательные службы используют нашу службу синхронизации для создания специальной онлайн-студии с дронами, автомобильными и нательными камерами, датчиками и мобильными телефонами населения в качестве источников входных данных. Чрезвычайная гибкость открывает новые способы общения в очень сложных ситуациях, используя возможности самого доступного ресурса: людей поблизости.
Чрезвычайная гибкость открывает новые способы общения в очень сложных ситуациях, используя возможности самого доступного ресурса: людей поблизости.
До встречи в IBC,
Ингар Арнцен
Комментариев нет | | Категория ОбъявленияИнгар Арнцен | Опубликовано:
Рад объявить о новой публикации от Multi-device Timing CG. Совсем недавно на Springer было опубликовано новое руководство по синхронизации мультимедиа. Ньола Т. Борха, Франсуа Дауста и меня попросили написать главу, основанную на наших исследованиях в этой области.
Синхронизация мультимедиа в Интернете
В этой главе объясняется, как выполнить синхронизацию мультимедиа в Интернете, и как правильно выполненная синхронизация мультимедиа является ключевым фактором для новой и очень привлекательной модели мультимедиа для синхронизированных веб-медиа на нескольких устройствах.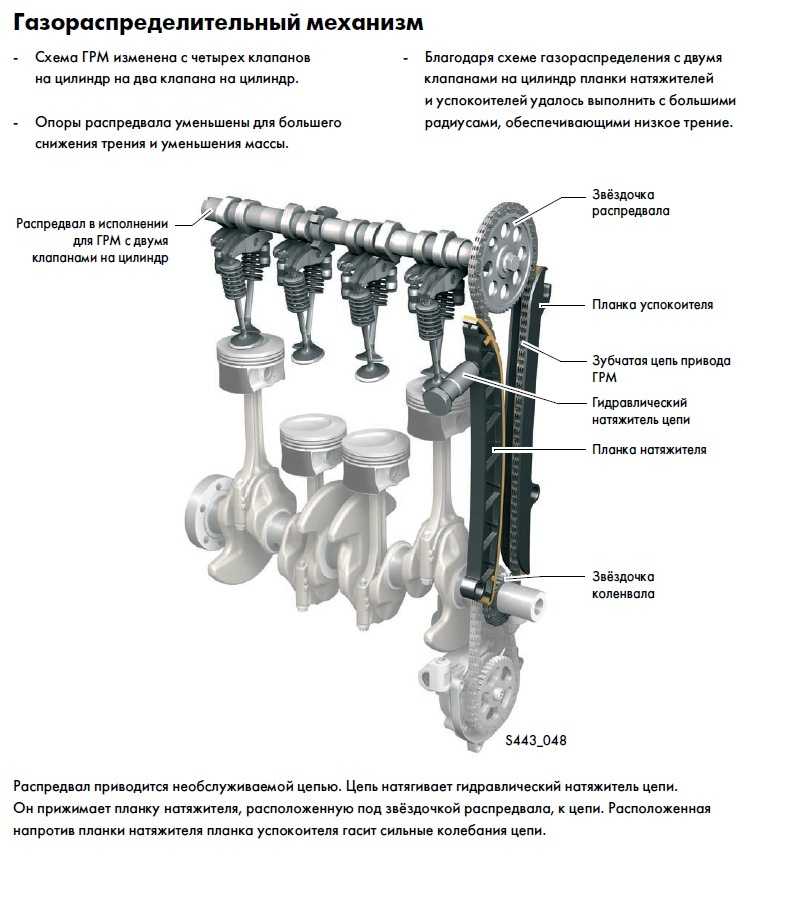
Я также думаю, что эта глава является наиболее подробным введением в идеи и предложения, выдвинутые в рамках CG Multi-device Timing CG на данный момент.
Авторская версия этой главы доступна здесь. Пожалуйста, цитируйте оригинальную главу, опубликованную Springer. Вы также можете запросить версию главы Springer, отправив электронное письмо авторам напрямую или запросив доступ через ResearchGate 9.0009
Ингар
Комментариев нет | | Категория ОбъявленияИнгар Арнцен | Опубликовано:
Для наиболее точной синхронизации мультимедиа HTML5 и лучшего взаимодействия с пользователем (избегая аудиовизуальных артефактов) мы зависим от динамической настройки переменной скорости воспроизведения. Это работает во всех браузерах, но мы обнаружили небольшую ошибку в реализации variablePlaybackRate в Safari, которая приводит к ужасным результатам.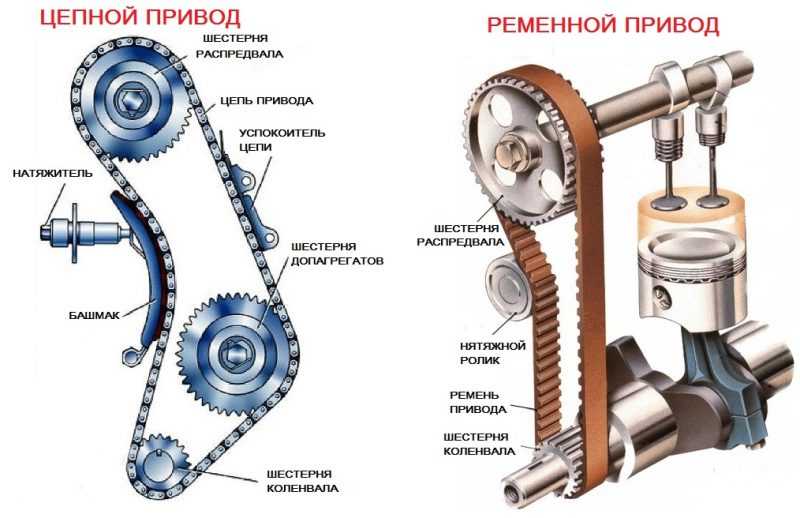
Кажется, есть побочный эффект, когда переменная playbackrate изменяется, что приводит к приостановке значения currentTime на короткий интервал времени, примерно 0,1–0,3 секунды.
Мы сообщили об ошибке в Apple. Надеюсь, они смогут это исправить.
https://bugs.webkit.org/show_bug.cgi?id=163433
Ингар и Ньол
Комментариев нет | | КатегорияИнгар Арнцен | Опубликовано:
Привет всем.
Компьютерная графика с несколькими устройствами настроена для сеанса на TPAC в этом году в Лиссабоне. Заседание запланировано на четверг, 22 сентября, с 15:30 до 17:30 [1].
Сессию будем вести Франсуа Дауст (W3C) и я.
Повестка дня довольно проста. Я начну с презентации и, возможно, нескольких демонстраций, охватывающих:
- Статус КГ
- введение в синхронизацию нескольких устройств
- реальность и цели для тайминга на веб-платформе Предложение
- — объект синхронизации + онлайн-поставщики времени
- приложений/вариантов использования
Затем мы обсудим следующие шаги
- необходимость стандартизации
- привлечение поддержки
- отношение к родственным инициативам
- Организация/деятельность CG
С уважением,
Ингар Арнцен, председатель.
[1] https://www.w3.org/2016/09/TPAC/schedule.html
Комментариев нет | | Категория ОбъявленияИнгар Арнцен | Опубликовано:
Привет всем.
Ньол, Франсуа и я публикуем новую статью о синхронизации нескольких устройств на IBC 2016. Документ озаглавлен (довольно смело;)) «Время: маленький шаг для разработчиков, гигантский скачок для медиаиндустрии» и включен в качестве вспомогательного документ на бумажной сессии: «Улучшение многоэкранного опыта с помощью синхронизации и персонализации». Для тех, кто присутствует на IBC в этом году, детали сессии можно найти здесь ссылка на сессию.
Этот документ не является слишком техническим, но вместо этого фокусируется на том, как в настоящее время отрасль работает с синхронизацией, а также указывает на возможности, которые появятся в результате принятия подхода синхронизации с несколькими устройствами (т.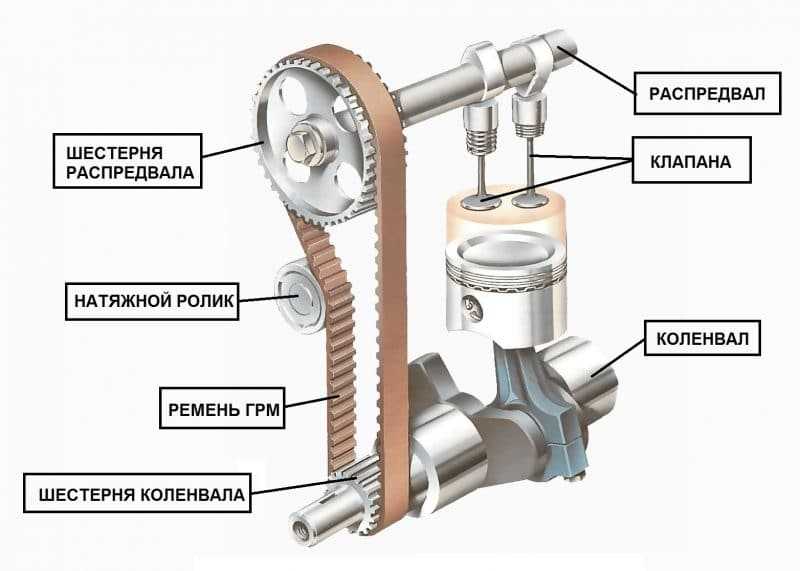 е. объект синхронизации + совместное движение).
е. объект синхронизации + совместное движение).
PDF здесь Borch_IBC2016-final
Njål будет представлять CG Multi-device Timing CG на IBC, так что с ним можно поговорить.
Бест, Ингар
1 комментарий | | Объявления категории, Без рубрикиИнгар Арнцен | Опубликовано:
Ньол и я только что вернулись с выставки NABShow 2016, которая проходила 16–21 апреля в Лас-Вегасе, где партнеры MediaScape, Norut и Vicomtech, продвигали объект синхронизации и группу сообщества W3C по синхронизации нескольких устройств.
Ньол Борх на стенде Timing Object – NABShow 2016Вы можете найти нашу основную брошюру здесь: Кратко об объекте времени
Синхронизация нескольких устройств Наша установка в киоске Futures Park была довольно простой; четыре разных ноутбука и два смартфона. Как вы можете видеть на картинке, мы использовали ноутбуки для показа подборки видео HTML5, синхронизируемых на разных экранах (с использованием Shared Motion и библиотеки MediaSync). Два ноутбука подключены по кабелю, два по WiFi. Мы использовали браузеры Firefox и Chrome. Один смартфон использовался для управления (воспроизведение, пауза, сдвиг объектов времени, а также переключение между видео). Для озвучивания видео использовался другой смартфон. Мы также взяли с собой две пары наушников, одна из которых была подключена к ноутбуку, а другая — к смартфону. Таким образом, используя оба наушника вместе, наша аудитория могла проверить безэховую синхронизацию между смартфоном и ноутбуком. Мы также позаботились о перезагрузке веб-браузеров, чтобы продемонстрировать, насколько быстро восстанавливается синхронизация — доли секунды, пока доступны видеоданные. Демонстрации работали идеально синхронно в течение четырех дней подряд без каких-либо сбоев. Это впечатляет, особенно учитывая плохие сетевые условия в выставочном зале NAB!
Два ноутбука подключены по кабелю, два по WiFi. Мы использовали браузеры Firefox и Chrome. Один смартфон использовался для управления (воспроизведение, пауза, сдвиг объектов времени, а также переключение между видео). Для озвучивания видео использовался другой смартфон. Мы также взяли с собой две пары наушников, одна из которых была подключена к ноутбуку, а другая — к смартфону. Таким образом, используя оба наушника вместе, наша аудитория могла проверить безэховую синхронизацию между смартфоном и ноутбуком. Мы также позаботились о перезагрузке веб-браузеров, чтобы продемонстрировать, насколько быстро восстанавливается синхронизация — доли секунды, пока доступны видеоданные. Демонстрации работали идеально синхронно в течение четырех дней подряд без каких-либо сбоев. Это впечатляет, особенно учитывая плохие сетевые условия в выставочном зале NAB!
Реакция на демонстрации была исключительно положительной. Многие люди выразили удовлетворение по поводу инициативы, направленной на улучшение поддержки синхронизации на веб-платформе.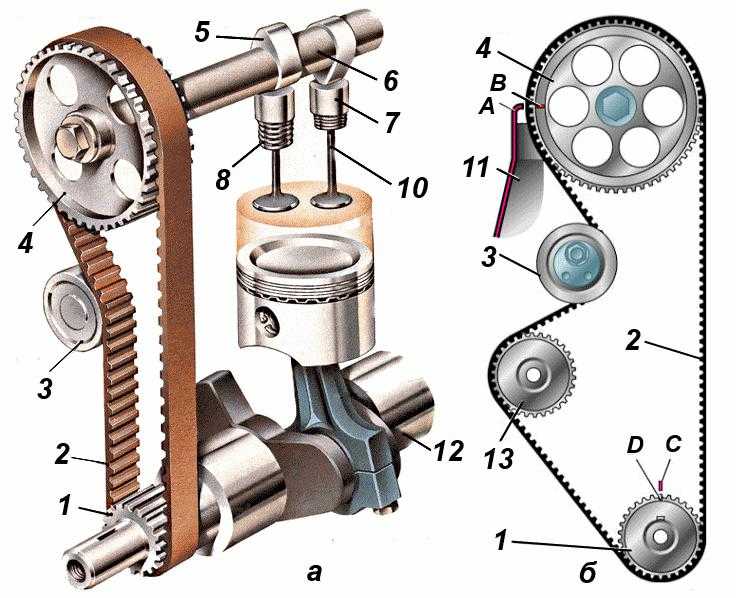 Люди также были ошеломлены качеством синхронизации, а также перспективой сделать это глобально. Некоторым было интересно узнать о вариантах использования, в то время как другие сразу осознали необходимость хронометража и синхронизации в различных приложениях для вещания, будь то прямая трансляция, вставка рекламы, мозаичные настройки экрана, синхронизированный пользовательский контент, совместный просмотр, удаленное управление или что-то еще. Мы упомянули конкретные варианты использования, такие как приложения для вторичных устройств, альтернативные звуковые дорожки на вторичных устройствах (доступность и т. д.). Мы также представили более ценные обещания более высокого уровня, такие как постоянство времени в UX и важную роль времени в отношении интеграции и взаимодействия между разнородными медиа-системами. Наконец, у нас были очень конкретные интересы от очень центральных игроков. Мы сообщим вам, когда интерес материализуется.
Люди также были ошеломлены качеством синхронизации, а также перспективой сделать это глобально. Некоторым было интересно узнать о вариантах использования, в то время как другие сразу осознали необходимость хронометража и синхронизации в различных приложениях для вещания, будь то прямая трансляция, вставка рекламы, мозаичные настройки экрана, синхронизированный пользовательский контент, совместный просмотр, удаленное управление или что-то еще. Мы упомянули конкретные варианты использования, такие как приложения для вторичных устройств, альтернативные звуковые дорожки на вторичных устройствах (доступность и т. д.). Мы также представили более ценные обещания более высокого уровня, такие как постоянство времени в UX и важную роль времени в отношении интеграции и взаимодействия между разнородными медиа-системами. Наконец, у нас были очень конкретные интересы от очень центральных игроков. Мы сообщим вам, когда интерес материализуется.
Итак, большое спасибо Norut, Vicomtech и MediaScape за отличное выступление на NAB!
Следующим важным событием для Multi-device Timing CG, вероятно, станет F2F в Лиссабоне на TPAC 2016 в сентябре.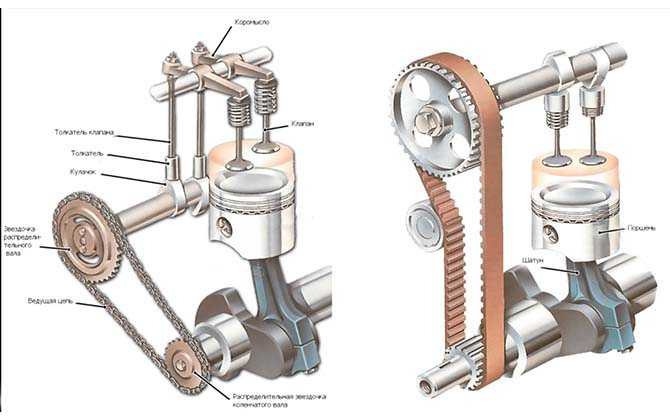
С уважением, Ингар
Комментариев нет | | Категория ОбъявленияИнгар Арнцен | Опубликовано:
Объект времени 2-страничный буклет.
PDF здесь TimingObject.pdf
Этот буклет был создан для стенда Multi-device Timing Community Group на выставке NABShow 2016 в Лас-Вегасе.
1 комментарий | | КатегорияИнгар Арнцен | Опубликовано:
Мы только что опубликовали статью о секвенировании в веб-мультимедиа. Последовательность — это активация и деактивация элементов мультимедиа в нужное время во время воспроизведения мультимедиа. В документе подчеркивается важность отделения логики последовательности от форматов данных, синхронизации/управления и пользовательского интерфейса в мультимедиа в Интернете.
- Независимая от данных последовательность предполагает широкую полезность, а также простую интеграцию различных типов данных и методов доставки в мультимедийные приложения.
- Независимая от пользовательского интерфейса последовательность упрощает интеграцию новых типов данных в визуальные и интерактивные компоненты.
- Интеграция с объектом синхронизации обеспечивает простую синхронизацию задач последовательности и дистанционное управление ими как в одностраничных мультимедийных презентациях, так и в глобальных мультимедиа-приложениях (например, с помощью Shared Motion).
Короче говоря, мы видим точную распределенную последовательность в качестве фундаментального строительного блока мультимедиа с синхронизацией по времени на нескольких устройствах.
Sequencer представлен как универсальный инструмент программирования для синхронизированных веб-мультимедиа, реализованный на JavaScript и основанный на setTimeout. Хотя ошибки синхронизации в пределах пары миллисекунд часто допустимы в веб-приложениях, это также указывает на то, что будущие улучшения setTimeout будут полезны.