Устройство и принцип работы рулевого управления
Общее устройство и принцип работы системы рулевого управления автомобиля, как и многих других современных транспортных средств, можно описать следующим образом. Рулевое управление имеет рулевые тяги, рулевой механизм с реечной или червячной передачей и рулевую колонку, оканчивающуюся рулевым колесом. Функционирует система довольно просто: при воздействии на руль усилие через рулевой механизм передается на рулевые тяги, которые шарнирно связаны с рычагами подвески, что приводит к изменению траектории движения авто. Кроме того, рулевое колесо информирует водителя о состоянии дорожного покрытия, определяемое по величине усилия, приложенных к рулю. Если не брать во внимание размер рулевого колеса у спорткаров, диаметр руля для большинства автомобилей находится в пределах 38-42,5 см.
Рулевое колесо соединяется с рулевым механизмом посредством травмобезопасной рулевой колонки, которая имеет несколько карданных соединений. Травмобезопасность заключается в том, что при лобовом столкновении на большой скорости она (колонка) складывается, снижая таким образом степень тяжести нанесенных водителю травм. Современные автомобили снабжены электрической или механической регулировкой адаптации рулевой колонки под рост водителя. Изменение осуществляется как в вертикальном направлении, так и по длине, либо в двух направлениях. Также предусмотрена противоугонная защита путем блокирования рулевой колонки электрическим или механическим способом.
Травмобезопасность заключается в том, что при лобовом столкновении на большой скорости она (колонка) складывается, снижая таким образом степень тяжести нанесенных водителю травм. Современные автомобили снабжены электрической или механической регулировкой адаптации рулевой колонки под рост водителя. Изменение осуществляется как в вертикальном направлении, так и по длине, либо в двух направлениях. Также предусмотрена противоугонная защита путем блокирования рулевой колонки электрическим или механическим способом.
Рулевой механизм выполняет роль множителя усилий, приложенных водителем к рулевому колесу с последующим распространением нагрузки на рулевой привод. Самым применяемым типом редуктора рулевого механизма в автомобилях является червячная и реечная его конструкции, причем первый вариант чаще использовался в автомобилях прошлого столетия. Реечный вариант представляет собой цилиндрическую шестерню, составляющую одно целое с валом и перемещающуюся по зубчатой рейке, которая шарнирно связана с рулевыми тягами. При изменении положения руля на определенный угол рейка совершает движение в горизонтальной плоскости и через тяги поворачивает колеса. Пара шестерня-рейка находится в корпусе редуктора, который расположен в подрамнике подвески.
При изменении положения руля на определенный угол рейка совершает движение в горизонтальной плоскости и через тяги поворачивает колеса. Пара шестерня-рейка находится в корпусе редуктора, который расположен в подрамнике подвески.
Некоторые автомобили снабжены рулевым механизмом с переменным передаточным отношением, где применена зубчатая рейка с различным профилем зубьев: в околонулевой зоне зубья имеют форму треугольника, а ближе к краям – вид трапеции. Конструкция рейки с различной геометрией зубьев способствует изменению передаточного числа в паре шестерня-рейка, уменьшая угол поворота рулевого колеса. Благодаря этой схеме управлять автомобилем намного удобнее, динамичнее, и требуется меньше усилий, прилагаемых к рулевому колесу.
Отдельные производители авто используют на автомобилях рулевые механизмы с управлением на четыре колеса. Конструкция позволяет добиться более эффективного управления и обеспечивает стабильность машины при движении на высокой скорости. Благодаря такому техническому решению передние и задние колеса авто получили синхронизацию при повороте в ту или иную сторону.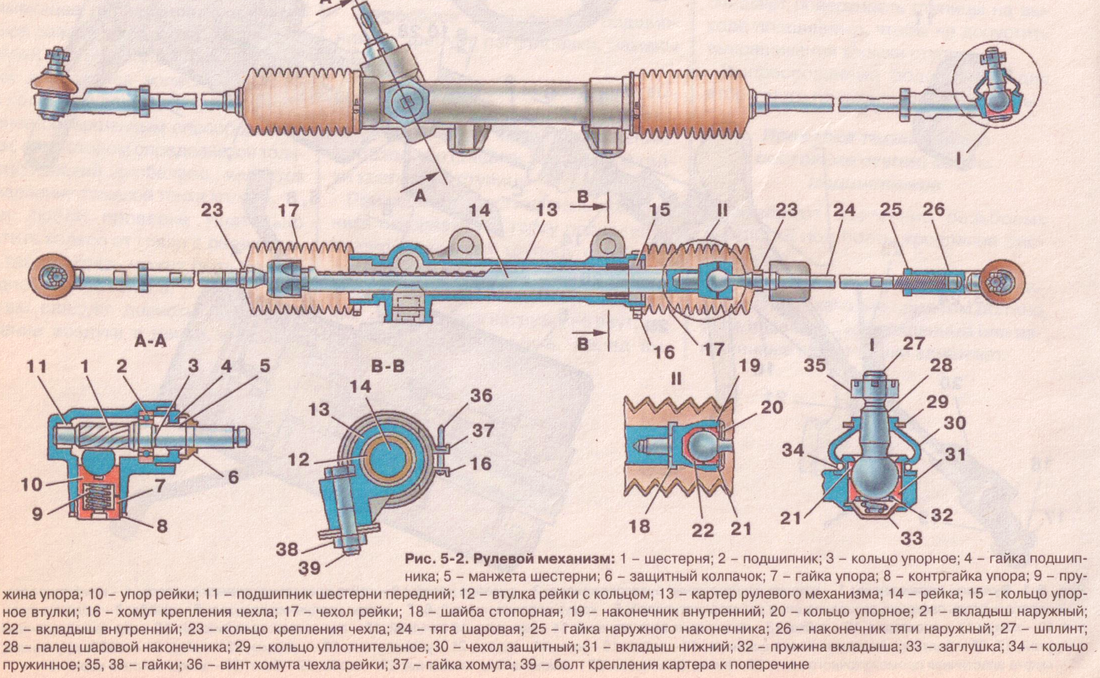 Кроме того, улучшилась маневренность в случае, когда автомобиль движется с малой скоростью: передние и задние колеса могут быть повернуты в разном направлении. Это достигается за счет того, что при большой скорости автомобиля сайлентблоки, установленные на задней подвеске, под воздействием сил во время поворота авто деформируются, не давая колесам существенно изменить угол поворота.
Кроме того, улучшилась маневренность в случае, когда автомобиль движется с малой скоростью: передние и задние колеса могут быть повернуты в разном направлении. Это достигается за счет того, что при большой скорости автомобиля сайлентблоки, установленные на задней подвеске, под воздействием сил во время поворота авто деформируются, не давая колесам существенно изменить угол поворота.
Рулевой привод представляет собой шарнирно-рычажную конструкцию, посредством которой усилия, прилагаемые к рулю, передаются напрямую колесам, обеспечивая при этом устойчивость автомобиля при повороте. Кроме этого, конструкция удерживает колеса при работе подвески, тип которой зависит от устройства рулевого привода.
Наиболее популярна механическая конструкция рулевого привода, включающая в себя рулевые тяги и шаровые опоры (рулевые шарниры). В свою очередь, шаровой шарнир, защищенный от износа вкладышами, находится в корпусе с закрытым резиновым пыльником, который препятствует проникновению пыли и грязи в шарнирное соединение.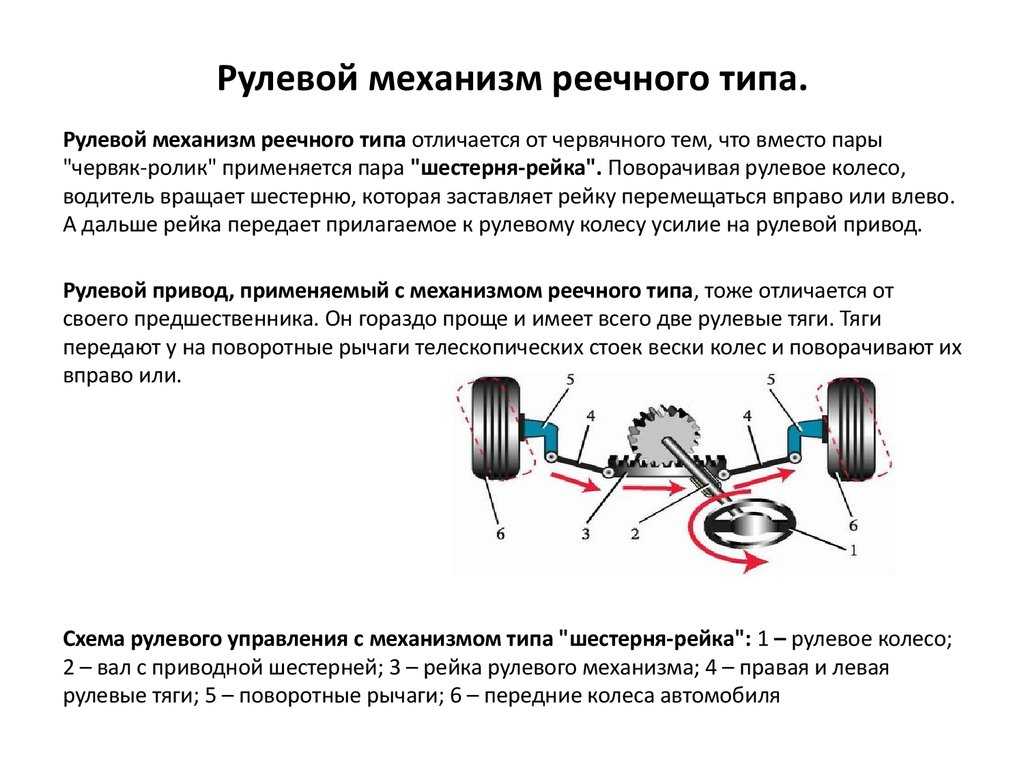 Шаровой шарнир изготовлен как одно целое с шаровым пальцем, который служит наконечником для рулевых тяг и составляет с ними дополнительный рычаг подвески.
Шаровой шарнир изготовлен как одно целое с шаровым пальцем, который служит наконечником для рулевых тяг и составляет с ними дополнительный рычаг подвески.
Для регулировки рулевого управления существует несколько параметров, влияющих на устойчивость автомобиля во время движения, и на усилие, прилагаемое к рулю. Четыре наиболее важных из них касаются угловых регулировок: развал, схождение, угол продольного и поперечного наклона поворотной ступицы колеса, а также две регулировки плеча (стабилизация и обкатка). Стоит заметить, что все регулировки связаны между собой и оказывают важное влияние на работу всего рулевого управления.
Современные автомобили уже не обходятся без усилителя рулевого управления, которое значительно уменьшает усилие, приложенное к рулю, позволяет точно и быстро реагировать на окружающую обстановку при движении. Благодаря усилителю руля водитель меньше утомляется, да и передаточное число шестерен в редукторе можно уменьшить, что делает его более компактным. По своему типу привод усилителя делится на электрический, гидравлический или пневматический. Последний больше относится к автомобилям грузового класса.
По своему типу привод усилителя делится на электрический, гидравлический или пневматический. Последний больше относится к автомобилям грузового класса.
В большинстве своем автомобили нынешнего поколения снабжены гидравлическим усилителем рулевого управления, называемым для простоты «гидроусилитель руля». Кроме этого, существует его вариант – электрогидравлический усилитель, в котором жидкость нагнетается насосом с приводом от электродвигателя. Однако прогрессивным считается применяемый сегодня электрический усилитель руля, в котором крутящий момент вала электродвигателя подается непосредственно на карданный вал рулевого колеса или прямо на рулевой редуктор. А использование электроники делает возможным применение электроусилителя при парковке в автоматическом режиме или в системе, которая помогает удерживать автомобиль на полосе движения.
Инновационным усилителем руля можно считать адаптивный усилитель рулевого управления, благодаря которому усилие, прилагаемое при повороте колеса, зависит от скорости движения.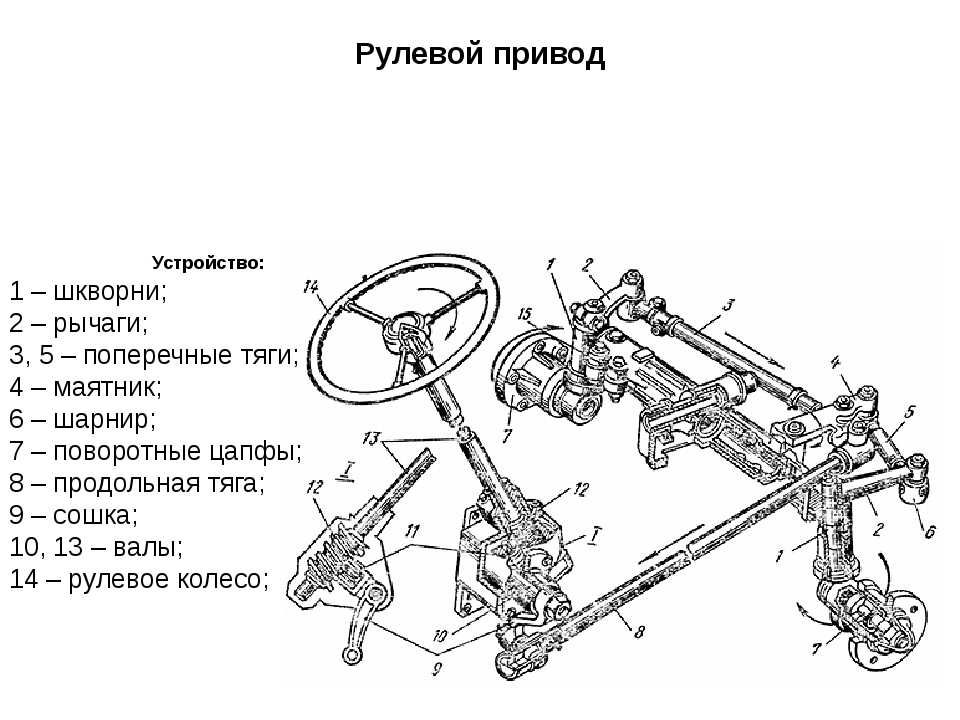 Как пример подобной конструкции можно привести известный адаптивный гидравлический усилитель Servotronic. К новинке можно отнести и систему активного рулевого управления BMW, а также систему динамического рулевого управления от Audi, в котором передаточное число редуктора рулевого механизма зависит от скорости движения автомобиля.
Как пример подобной конструкции можно привести известный адаптивный гидравлический усилитель Servotronic. К новинке можно отнести и систему активного рулевого управления BMW, а также систему динамического рулевого управления от Audi, в котором передаточное число редуктора рулевого механизма зависит от скорости движения автомобиля.
Устройство и работа рулевого гидроусилителя автомобиля МАЗ. — Студопедия
Поделись
Рисунок 3 — Рулевое управление автомобиля МАЗ-5335.
1 — продольная рулевая тяга; 2 — гидроусилитель рулевого привода; 3 — сошка; 4 — рулевой механизм; 5 — карданный шарнир привода рулевого управления; 6 — рулевой вал; 7 — рулевое колесо; 8 — поперечная рулевая тяга; 9 — левый рычаг поперечной рулевой тяги; 10 — поворотный рычаг.
Устройство гидроусилителя. Гидроусилитель рулевого механизма состоит из силового цилиндра и распределителя в сборе (рис. 4).
Распределитель состоит из корпуса распределителя 13 с золотником 30. На внутренней поверхности корпуса и на золотнике выполнены кольцевые канавки. Они предназначены для соединения с нагнетательной магистралью насоса, бачком насоса и с реактивными камерами силового цилиндра. В корпусе шарниров 6 находятся два шаровых пальца 9 и 10. К пальцу 10 присоединена рулевая сошка, а к пальцу 9 — продольная рулевая тяга. Палец 10 со стаканом 36 может перемещаться в корпусе 6 в осевом направлении на 4 мм. Вместе со стаканом перемещается и золотник 30, так как он жестко связан со стаканом при помощи болта и гайки.
На внутренней поверхности корпуса и на золотнике выполнены кольцевые канавки. Они предназначены для соединения с нагнетательной магистралью насоса, бачком насоса и с реактивными камерами силового цилиндра. В корпусе шарниров 6 находятся два шаровых пальца 9 и 10. К пальцу 10 присоединена рулевая сошка, а к пальцу 9 — продольная рулевая тяга. Палец 10 со стаканом 36 может перемещаться в корпусе 6 в осевом направлении на 4 мм. Вместе со стаканом перемещается и золотник 30, так как он жестко связан со стаканом при помощи болта и гайки.
Силовой цилиндр 1 соединен с другим концом корпуса 6 шарниров при помощи резьбового соединения и законтрен гайкой. В цилиндр помещен поршень 4, закрепленный на штоке 2 и уплотненный кольцами. С одной стороны цилиндр закрыт пробкой 5, а с другой — крышкой 21. Шток уплотнен в крышке резиновым кольцом и защищен от загрязнения гофрированным чехлом. На наружном конце штока закреплена головка 24.
Поршень делит цилиндр на две части: подпоршневую и надпоршневую. Эти полости соединены трубопроводами 15 и 17 с каналами в корпусе распределителя, которые заканчиваются каналами, выходящими в полость корпуса между кольцевыми канавками. Подпоршневая и надпоршневая полости сообщаются через клапан 35, состоящий из шарика и пружины.
Эти полости соединены трубопроводами 15 и 17 с каналами в корпусе распределителя, которые заканчиваются каналами, выходящими в полость корпуса между кольцевыми канавками. Подпоршневая и надпоршневая полости сообщаются через клапан 35, состоящий из шарика и пружины.
Рисунок 4 — Гидроусилитель рулевого управления автомобиля МАЗ-5335.
1 — силовой цилиндр; 2 — шток; 3 — нагнетательный трубопровод; 4 — поршень; 5, 31 — пробки; 6 — корпус шаровых шарниров; 7- регулировочная гайка люфта шарового шарнира продольной тяги; 8 — толкатель; 9- шаровой палец продольной тяги; 10 — шаровой палец рулевой сошки; 11 — сливной трубопровод; 12 — крышка; 13 — корпус распределителя; 14 — фланец; 15- трубопровод к надпоршневой полости сливного цилиндра; 16 — хомут крепления уплотнителя; 17 — трубопровод к подпоршневой полости силового цилиндра; 18- масленка; 19- штифты фиксации сухарей; 20 — стопорный винт; 21 — крышка силового цилиндра; 22 — винт; 23- внутренняя шайба крепления чехла; 24 — головка штока; 25- шплинт; 26 — штуцер сливной магистрали; 27 — штуцер нагнетательной магистрали; 28 — держатель шлангов; 29 — регулировочная пробка люфта шарового шарнира рулевой сошки; 30 — золотник; 32 — пробка золотника; 33 — стяжной болт; 34 — соединительный канал; 35 — обратный клапан; 36 — стакан.
Работа гидроусилителя (рис. 5). При работающем двигателе автомобиля шестеренчатый насос 21 постоянно подает масло в гидроусилитель 22, и в зависимости от направления движения автомобиля масло либо возвращается в бачок 20, либо подается в одну из рабочих полостей силового цилиндра 8через трубопроводы 5 и 6. Другая полость при этом соединена через сливную магистраль 14 с бачком 20.
Рисунок 5 – Схема работы гидроусилителя рулевого управления.
а — при прямолинейном движении; б и г- при повороте влево; в и д — при повороте вправо.
1 — реактивная камера; 2 — золотник; 3 — каналы; 4 — корпус распределителя; 5, 6 — трубопроводы; 7 — поршень; 8 — силовой цилиндр; 9 — шток поршня; 10 — продольная рулевая тяга; 77, 12 — шаровые пальцы; 13 — рулевая сошка; 14 — сливная магистраль; 15 — нагнетательная полость; 16 — нагнетательный шланг; 17 — сливная полость; 18 — обратный клапан; 19 — рулевое колесо; 20 — бачок; 21 — насос; 22 – гидроусилитель.
Давление масла через каналы 3 в золотнике 2 всегда передается в реактивные камеры 1 и стремится установить золотник в нейтральное по отношению к корпусу положение.
При прямолинейном движении автомобиля (рис. 5, а) масло подается по нагнетательной линии в клапан управления и через золотник по сливной магистрали 14 возвращается в бачок 20.
При повороте рулевого колеса влево (рис. 5:б,г) или вправо (рис. 5:в,д) рулевая сошка 13 через шаровой палец 12 сдвигает золотник в сторону от нейтрального положения. При этом нагнетательная 15 и сливная 17 полости в корпусе золотника разобщаются, и жидкость начинает поступать в соответствующую полость силового цилиндра, перемещая цилиндр 8 относительно поршня 7, закрепленного на штоке 9. Движение цилиндра передается управляемым колесам через шаровой палец 11 и связанную с ним продольную рулевую тягу 10.
Если прекратить вращение рулевого колеса 19, золотник останавливается, корпус надвигается на него, устанавливаясь в нейтральное положение. Начинается слив масла в бачок, и поворот колес прекращается.
С повышением сопротивления повороту колес увеличивается и давление масла в рабочей полости силового цилиндра.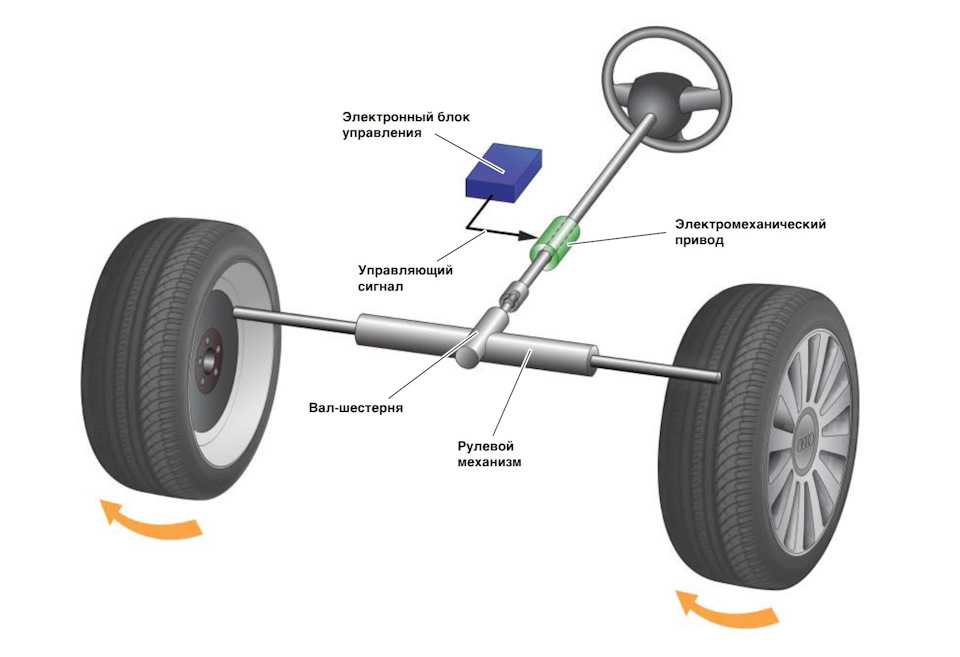 Это давление передается в реактивные камеры и стремится установить золотник в нейтральное положение.
Это давление передается в реактивные камеры и стремится установить золотник в нейтральное положение.
Усилие на рулевом колесе в начале поворота колес не превышает 50 Н. Максимальное усилие на ободе рулевого колеса достигает 200 Н.
Вопросы для самопроверки:
1. Объясните назначение и перечислите типы усилителей рулевого управления;
2. Объясните общее устройство и принцип работы рулевого управления с гидроусилителем;
3. объясните, какие бывают схемы компоновки гидроусилителей рулевого управления;
4. Объясните устройство рулевого гидроусилителя автомобиля МАЗ;
5. Объясните работу рулевого гидроусилителя автомобиля МАЗ;
6. Объясните устройство и работу насоса гидроусилителя рулевого привода автомобилей ЗИЛ – 130;
7. Объясните устройство и работу усилителя рулевого привода автомобиля ГАЗ – 4301.
Литература:
1. Тур Е.Я. Устройство автомобиля. – М.: Машиностроение, 1990.
2. Михайловский Е. В. Устройство автомобиля. – М.: Машиностроение, 1985.
В. Устройство автомобиля. – М.: Машиностроение, 1985.
3. Роговцев В.Л. Устройство и эксплуатация автотранспортных средств. – М.: Транспорт, 1989.
4. Пехальский А.П. Устройство автомобилей. – М.: «Академия», 2005.
Лекция
AutoInfoMe: Автомобильное рулевое управление
3.1 Введение
Автомобиль был изобретен более 100 лет назад. В качестве
важная часть автомобиля, автомобильная система рулевого управления была создана с
эволюция автомобиля в конфигурации, функциях и внешнем виде. Рулевое управление
системы в основном представляет собой механическую связь или механизм, с помощью которого водитель может
контролирует и управляет движением или направлением движения автомобиля. Вместе с
разработка самой автомобильной техники и производительности, автомобильное рулевое управление
система нуждается в инновациях за счет увеличения динамизации и управляемости системы
шаг за шагом. Чтобы адаптироваться к мутативной среде, необходимо
точка для системы рулевого управления, как повысить ее гибкость и изменчивость.
Чтобы адаптироваться к мутативной среде, необходимо
точка для системы рулевого управления, как повысить ее гибкость и изменчивость.
Раньше, когда автомобиль был просто
изобрели, водитель поворачивал ручку или рельс с рулевым валом в его
рука для вождения. Рулевой механизм автомобиля был шестеренчато-рейочным.
самый ранний предок автомобильного рулевого механизма. Передаточное отношение рулевого механизма
было 1 к 1. Для движения требовалось много энергии. Когда автомобильный предварительно положительный двигатель
были разработаны в 1891 году, был увеличен вес головы автомобиля,
таким образом, вибрация системы рулевого управления может передаваться водителю при повороте рукоятки.
или рельс, и это заставляло водителя чувствовать себя слишком усталым. Как одношарнирный механизм,
исходную ручку или рейку с рулевым валом следует усовершенствовать, а ее
гибкость должна быть увеличена, чтобы избежать недостатка. В ранние времена,
системы ручки или рельса с рулевым валом все просты, и они только
имеют функцию поворота вправо или влево.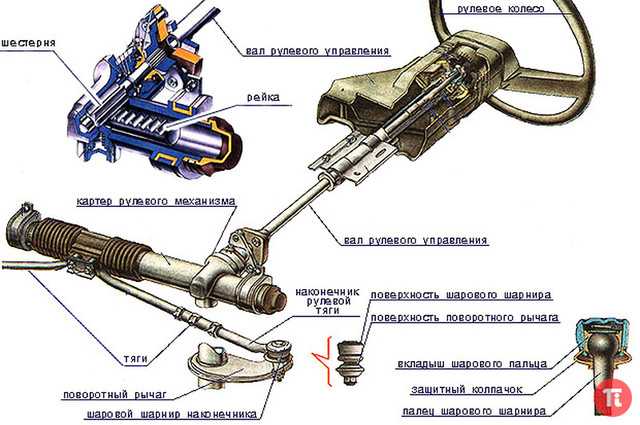
3.2 Функции системы рулевого управления:
Функции рулевой системы: позволять
качание колес влево или вправо для поворота автомобиля по желанию
водитель (позволить водителю вести транспортное средство). Он преобразует вращательное движение
руля в угловой поворот передних колес. Это обеспечивает
курсовая устойчивость с помощью правильной геометрии рулевого управления.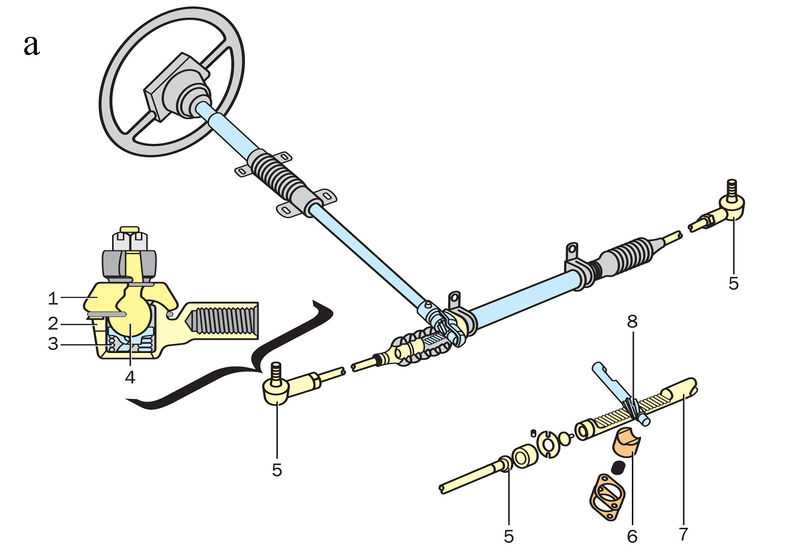
3.3 Требования к системе рулевого управления:
1. Правильно
разработанная система рулевого управления, работает хорошо и направляет транспортное средство в правильном направлении
направление.
2. Это
должно удовлетворять условию Аккермана.
3. Когда
рулевое колесо отпущено, колеса должны автоматически вернуться в исходное положение.
прямолинейном положении и должен оставаться устойчивым в этом положении.
 умение обращаться.
умение обращаться. Рулевое управление механизм должен быть очень точным, простым в установке и обращении или усилия должны быть минимальными, чтобы управлять.
5. Это должна обеспечивать максимальную курсовую устойчивость автомобиля. Дорога потрясает колеса не передаются в руки водителя; он должен поглощать дорожные толчки.
6. Это должен постоянно держать колесо в движении, не натирая его. Дорога.
7. Эта система должна ассоциироваться с контролем скорости.
8. Это должен быть легким и стабильным. Он должен легко эксплуатироваться с меньшими затратами на техническое обслуживание.
9. Это должен иметь самоцентрирующееся действие в некоторой степени.
10. на систему рулевого управления не должны воздействовать боковые тяги, силы на поворотах и эффекты ветра.
11. Хороший рулевой механизм должен быть сконструирован таким образом, чтобы он не допускал бокового проскальзывания передних колес при управлении.
12. Во время руления должно быть истинное качение колес.
 Передние колеса должны позволять поворачиваться влево и вправо для управления транспортным средством.
Передние колеса должны позволять поворачиваться влево и вправо для управления транспортным средством. 13. Должна быть определенная степень необратимости, чтобы удары дорожного покрытия не передаются на руки водителя.
3.4 Принцип правильного управления:
Автомобильный рулевой механизм на основе «Акермана».
Принцип рулевого управления», в то время как «Принцип правильного рулевого управления» является
основу этой связи. В механизме состоит из поперечной связи, соединенной
на короткие оси и передние колеса через короткие рычаги. Они образуют коленчатый рычаг
рычаг. При прямолинейном движении автомобиля поперечина остается параллельной
короткие звенья оба составляют угол α от горизонтальной оси шасси. Этот
система обеспечивает изменение направления движения автомобиля и
поддерживать положение по решению водителя, не напрягая его.
Элегантный и простой механизм, приближенный к идеальному рулевому управлению, был запатентован в Англии в 1818 году Рудольфом Акерманом, и хотя он назван в его честь,
Фактическим изобретателем был немецкий каретный строитель по имени Георг Ланкенспергер, который
разработал его двумя годами ранее.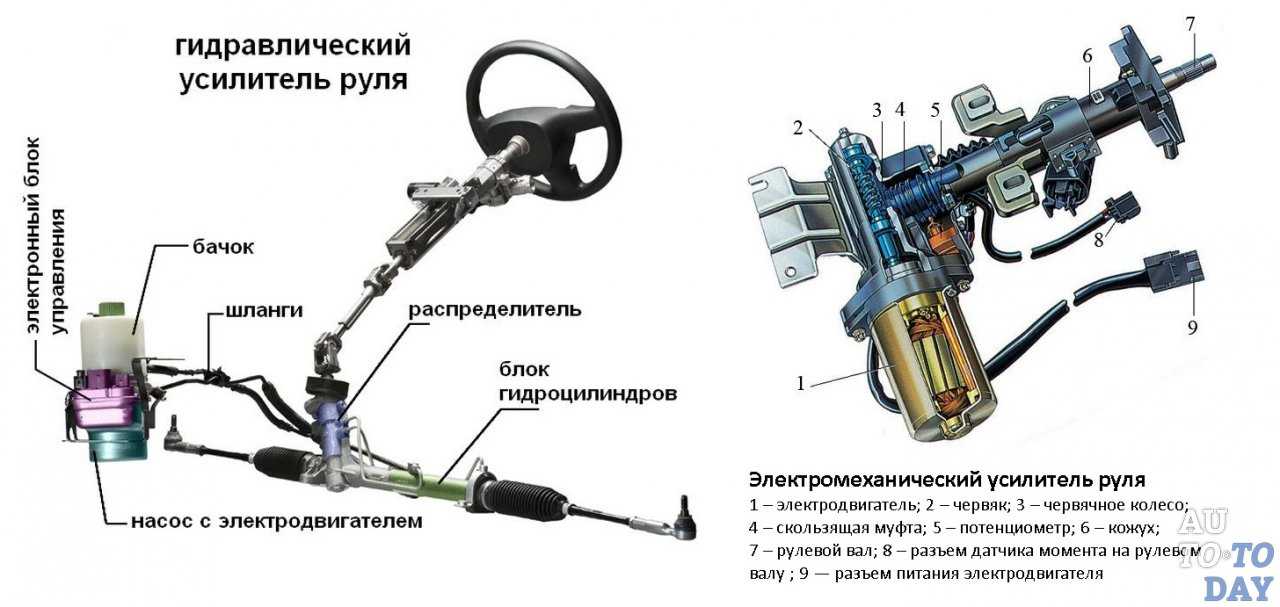
Правильное рулевое управление достигается, когда все четыре колеса отлично катятся при любых условиях эксплуатации. Принимая витков (рис. 3.1) условие идеальной прокатки выполняется, если оси передние колеса при изготовлении встречаются с осью заднего колеса в одной точке. Тогда эта точка — мгновенный центр (I) геометрии рулевого управления. Видно, что внутреннее колесо должно повернуться на больший угол, чем внешнее колесо. Чем больше угол поворота, тем меньше радиус поворота. Однако есть максимум, на который мы можем пойти в отношении угла поворота рулевого колеса. Это было найдено что угол поворота (внутреннего колеса) может иметь максимальное значение около 44º. Крайние положения с обеих сторон называются положениями блокировки. диаметр наименьшего круга, который может пройти внешнее переднее колесо автомобиля и получается, когда колеса находятся в крайнем положении, называется поворотный круг.
Рис. |
 3.1: Принцип правильного рулевого управления
3.1: Принцип правильного рулевого управления Для правильного управления,
cot φ = y+c / b, (φ=угол внутренней
замок)
= y/b + c/b
= cotθ + c/b, (θ= угол внешнего замка)
cot φ ₋ cotθ = с/б …. (уравнение правильное рулевое управление).
Вышеупомянутое уравнение представляет основное условие для рулевой механизм для идеального качения всех колес.
Условием правильного рулевого управления является то, что все
четыре колеса должны вращаться вокруг одного и того же мгновенного центра I, лежащего на
оси задних колес. Ось внутренних колес составляет больший угол θ
чем угол φ, образуемый осью внешнего колеса; это «принцип
механизма правильного рулевого управления». И этот принцип следует гораздо более известному «принципу Аккермана».
Управляемая геометрия». Термин «геометрия рулевого управления» (также известный как «передняя часть
геометрия») относится к угловому соотношению между подвеской и рулевым управлением.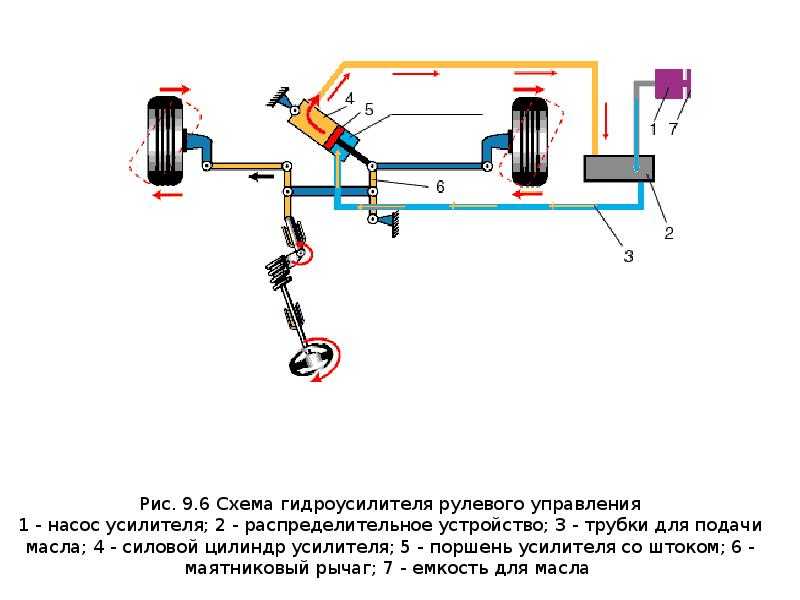 детали, передние колеса и дорожное покрытие. Поскольку выравнивание имеет дело с углами
и влияет на рулевое управление, метод описания измерений центровки называется
геометрия руля. Существует пять углов геометрии рулевого управления: развал, кастер.
,Схождение, Наклон оси рулевого управления и Схождение на поворотах. Намерение Аккермана
геометрия заключается в том, чтобы избежать необходимости бокового скольжения шин при следовании по
путь вокруг кривой. И за тем же кривым путем оба задних колеса также
вращаться с немного отличающейся скоростью друг от друга, чтобы удовлетворить правильное
состояние рулевого управления, чтобы принцип Аккермана работал идеально.
переход задних колес и их регулирование поддерживаются
«дифференциальная единица», которая играет жизненно важную, но скрытую роль в правильном
рулевой механизм. И поэтому это самый скрытый компонент для рулевого управления
геометрия из системы главной передачи. Линия траектории кривой передних колес и
центральная линия осей задних колес всегда пересекается в одной общей точке, называемой «I».
детали, передние колеса и дорожное покрытие. Поскольку выравнивание имеет дело с углами
и влияет на рулевое управление, метод описания измерений центровки называется
геометрия руля. Существует пять углов геометрии рулевого управления: развал, кастер.
,Схождение, Наклон оси рулевого управления и Схождение на поворотах. Намерение Аккермана
геометрия заключается в том, чтобы избежать необходимости бокового скольжения шин при следовании по
путь вокруг кривой. И за тем же кривым путем оба задних колеса также
вращаться с немного отличающейся скоростью друг от друга, чтобы удовлетворить правильное
состояние рулевого управления, чтобы принцип Аккермана работал идеально.
переход задних колес и их регулирование поддерживаются
«дифференциальная единица», которая играет жизненно важную, но скрытую роль в правильном
рулевой механизм. И поэтому это самый скрытый компонент для рулевого управления
геометрия из системы главной передачи. Линия траектории кривой передних колес и
центральная линия осей задних колес всегда пересекается в одной общей точке, называемой «I». (мгновенный центр), и это
возможно только при правильном функционировании рулевого управления и дифференциала.
(мгновенный центр), и это
возможно только при правильном функционировании рулевого управления и дифференциала.
3.5 Общее расположение системы рулевого управления:
В эволюции автомобильной системы рулевого управления два
в первую очередь применяется привод замещающего вала передних колес; рулевая рейка
конструкция зубчатой передачи стала теоретизироваться позже, и она была точно обработана, таким образом
Шестеренчато-реечный рулевой механизм применяется в автомобилях формально. С
автомобильная техника совершенствуется, автомобильная система рулевого управления также
быстро развивались. Там была тяга, которая соединяла навесное оборудование
рулевой вал друг к другу. Специальная рулевая рейка управляла рулевой тягой.
двигаясь вправо и влево, и заставляли внутреннее и внешнее колеса вращаться.
Механизм с шестеренчатым редуктором сделал автомобильную систему более гибкой к
контроль и изолированная вибрация. Ручка и рейка заменены на круглые
руль.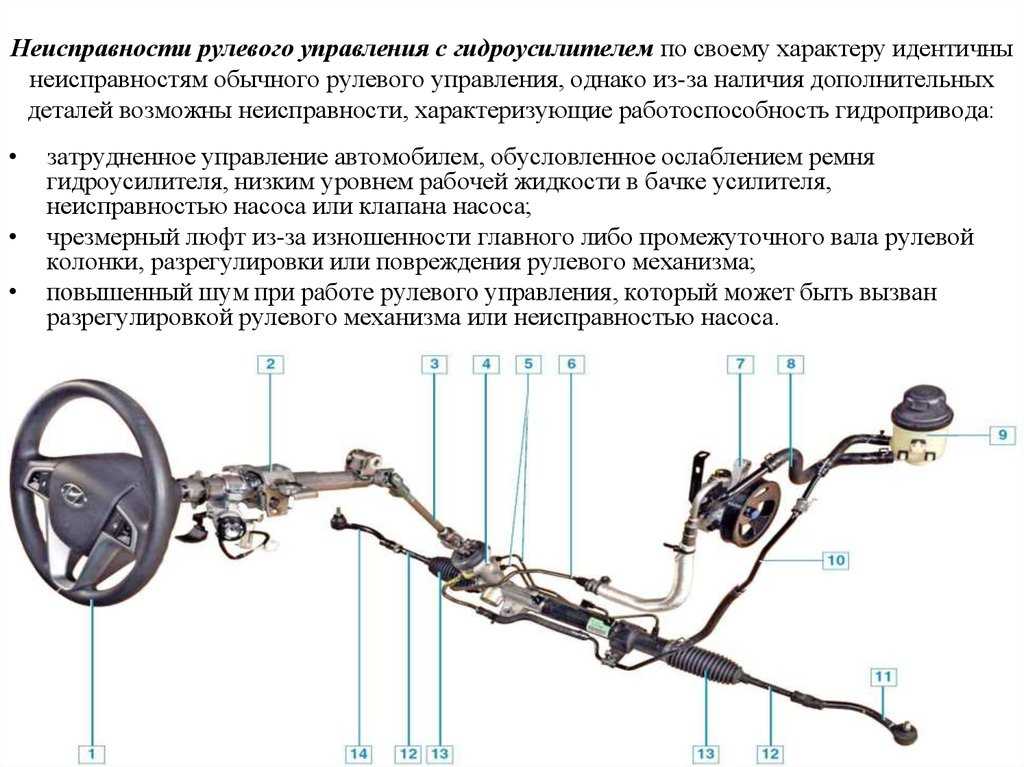 А круговой руль с рулевым валом переместился на
справа или слева. Прежняя вертикальная фиксация превратилась в градиентную фиксацию.
как для руля, так и для рулевого вала.
А круговой руль с рулевым валом переместился на
справа или слева. Прежняя вертикальная фиксация превратилась в градиентную фиксацию.
как для руля, так и для рулевого вала.
В любом транспортном средстве рулевое управление является основным компонентом. В основном рулевое управление связано с передними осями с помощью зубчатого механизма. На передней ось, установлены колеса, а с помощью руля водитель может поворачивайте автомобиль вправо, влево или прямо. Общее расположение автомобильной рулевой системы – это рулевое колесо, рулевая колонка и ее вал, рулевой редуктор и рулевые тяги. И это было показано в Рисунок 3.2.
Рис 3.2 Общее устройство рулевого управления автомобиля |
1.
Рулевое колесо : Колесо, поворачиваемое водителем
автомобиль, корабль и т. д., когда он или она хочет изменить направление движения
средство передвижения. В ранние времена существовало два вида появления автомобилей.
механизм управления. Они представляли собой простую ручку и две перекрещенные рейки. Идеи
исходил от штурвала парохода. После 1986 года появление
механизм управления автомобилем был в основном доработан под руль.
д., когда он или она хочет изменить направление движения
средство передвижения. В ранние времена существовало два вида появления автомобилей.
механизм управления. Они представляли собой простую ручку и две перекрещенные рейки. Идеи
исходил от штурвала парохода. После 1986 года появление
механизм управления автомобилем был в основном доработан под руль.
2.
Рулевая колонка и вал:
Вал, соединяющий рулевое колесо с
рулевой механизм в сборе. Его также называют рулевым валом, в совокупности называемым
система рулевого управления, рулевая колонка и вал соединяют рулевое колесо
к остальной части системы рулевого управления, расположенной рядом с колесами или в них. Самый современный
Автомобили поставляются с телескопическим рулевым валом, состоящим из двух стальных труб, одна из которых
который твердый, а другой полый. Твердая трубка скользит внутри полой
трубка, позволяющая ей разрушиться в случае столкновения. Рулевой вал
также имеет рулевую муфту, расположенную внизу, которая служит для поглощения
вибрации, а также допуская небольшие отклонения, происходящие в выравнивании
между рулевым механизмом и валом. Многим современным автомобилям не хватает клиренса
для облегчения прямого соединения рулевого вала и шестерни. Это
наклонная колонна для движения вперед и назад полностью регулируется, чтобы сделать вождение
намного удобнее.
Рулевой вал
также имеет рулевую муфту, расположенную внизу, которая служит для поглощения
вибрации, а также допуская небольшие отклонения, происходящие в выравнивании
между рулевым механизмом и валом. Многим современным автомобилям не хватает клиренса
для облегчения прямого соединения рулевого вала и шестерни. Это
наклонная колонна для движения вперед и назад полностью регулируется, чтобы сделать вождение
намного удобнее.
3.
Рулевой механизм: Шестерня установлена на нижнем конце рулевой колонки, которые используются для увеличения силы поворота водителя. Это преобразует вращательное движение руля в прямолинейное движение.
4.
Сошник: Передает движение коробки передач на рулевая тяга. Рычаг сошки приварен к коробке передач.
5.
Рулевая тяга : Система, соединяющая
рулевое колесо к переднему колесу и позволяет колесу менять направление в
реакция на команду водителя.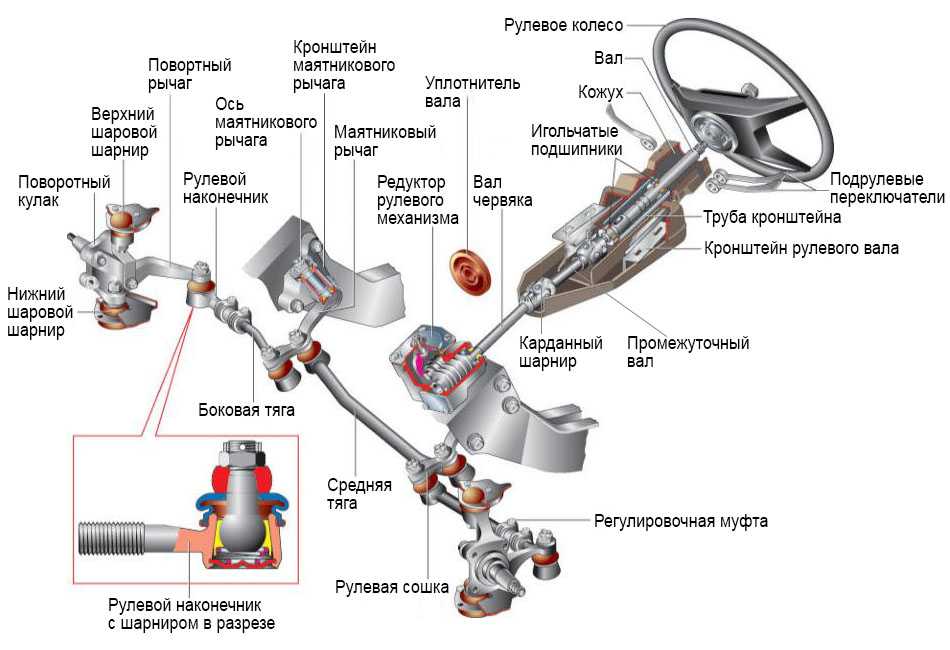 Рулевая тяга – это устройство
различные ссылки, а именно; рука питмана (перетащите руку), перетащите звено / центральное звено / нажмите или
тяга, рулевые тяги и поворотный кулак/рулевой рычаг.
Рулевая тяга – это устройство
различные ссылки, а именно; рука питмана (перетащите руку), перетащите звено / центральное звено / нажмите или
тяга, рулевые тяги и поворотный кулак/рулевой рычаг.
Техническое руководство TSPS
Техническое руководство TSPSPatriot State был учебным кораблем Массачусетской морской академии с 1986 по 1998 год.
[Следующий раздел] [Содержание] [Информация]
Модель Т.С. Система рулевого управления Patriot State предназначена для управления рулем направления в ответ на команды штурвала с мостика. Система состоит из следующих подсистем. Команды управления подаются на рулевую колонку с двойным управлением .0139 расположен на мостике корабля. В рулевом машинном отделении команды принимаются двумя линейными гидроагрегатами л и компенсационными гидронасосами и передаются на два радиально-поршневых насоса Hele Shaw . Радиально-поршневые насосы направляют гидравлическое масло под давлением к четырем гидроцилиндрам, которые перемещают руль направления. Точное управление положением руля осуществляется с помощью дифференциальной передачи и следящего механизма .. Аварийный ручной насос поставляется для использования в случае выхода из строя обычной гидравлической системы, а также для заполнения и слива системы, и все гидравлические компоненты системы связаны вместе с системами трубопроводов высокого и низкого давления . .
Точное управление положением руля осуществляется с помощью дифференциальной передачи и следящего механизма .. Аварийный ручной насос поставляется для использования в случае выхода из строя обычной гидравлической системы, а также для заполнения и слива системы, и все гидравлические компоненты системы связаны вместе с системами трубопроводов высокого и низкого давления . .
Каждый из вышеупомянутых компонентов будет подробно рассмотрен ниже.
Технические характеристики конструкции рулевого управления
Максимум. Крутящий момент руля направления вперед при угле поворота руля 35° 3 048 000 дюйм-фунтов Максимум. Крутящий момент руля направления назад при угле поворота руля 35 ° 4 370 000 дюйм-фунтов Максимум. Давление вперед при угле поворота руля 35° 735 psi Максимум. Давление на корме при угле поворота руля 35 ° 1055 фунтов на квадратный дюйм Настройка предохранительного клапана 1300 фунтов на квадратный дюйм Угол руля направления H.O. до H.O. 70° Время - Х.О. к Х.О. (работает один энергоблок) 2-1/3° в секунду Время - Х.О. к Х.О. (оба энергоблока работают) 4-2/3° в секунду Количество оборотов для трюкового колеса (70° по горизонтали до 70° по горизонтали) 9.1
Общее устройство системы рулевого управления
Подставка для руля Dual Control Gyro Pilot
Стойка управления гироскопом Sperry с двойным управлением обеспечивает три типа управления рулем направления: автоматическое управление с использованием входных данных гирокомпаса для поддержания выбранного курса, ручное управление с отслеживанием и ручное управление без отслеживания. Перемещение селекторного переключателя на рулевой стойке позволяет переключаться с одного типа управления рулем направления на другой.
Независимо от того, какой тип управления рулем используется, электрический сигнал направляется на один из двух независимых электрогидравлических органов рулевого управления, расположенных в рулевом машинном отделении.
Основой каждой системы автоматического рулевого управления (левого или правого борта) является мостик потенциометра. Каждый мост содержит два потенциометра, соединенных по схеме сбалансированного моста Уитстона. Один потенциометр каждого моста называется потенциометром управления. Он расположен на рулевой стойке и позиционируется как рулевым колесом, так и гирокомпасом, который воздействует на него через механическую дифференциальную передачу.
Другой потенциометр каждого моста Уитстона называется повторным потенциометром. Он расположен в линейных гидроагрегатах и управляется аппаратурой позиционирования рулей.
Когда потенциометр управления поворачивается рулевым колесом или гирокомпасом, сигнал постоянного тока, называемый сигналом ошибки курса, отправляется на управляемый соленоидом направляющий клапан, расположенный в каждой линейной гидравлической силовой установке. Полярность и величина этого сигнала курсовой ошибки указывают на направление и величину требуемого корректирующего действия руля направления.
Когда линейная гидравлическая силовая установка передает эту команду руля на радиально-поршневые насосы, потенциометр следящего или повторяющегося обратного хода генерирует сигнал постоянного тока, противоположный по полярности посылающему сигналу. Когда величина этого противоположного сигнала увеличивается до уровня сигнала ошибки курса, действующая команда гидравлической силовой установки становится равной нулю, и действие руля прекращается. Таким образом, обеспечивается полный последующий контроль.
Двойной кабель соединяет рулевую стойку в рулевой рубке с гидроагрегатами, расположенными в рулевом машинном отделении. Световые индикаторы на рулевой стойке показывают, какая система работает и есть ли питание в другой системе.
Линейная гидравлическая силовая установка
Линейная гидравлическая силовая установка состоит из двустороннего гидравлического цилиндра управления, направляющего и перепускного клапанов, установленных на коллекторе, параллельной рейки, внешних концевых выключателей, внутреннего концевого перепускного реле и потенциометра повторного возврата.
Блок питания получает электрические сигналы от рулевой колонки двойного управления гироскопом. В ответ на эти сигналы шток поршня позиционируется с помощью гидравлической жидкости, подаваемой под давлением агрегатами гидравлического насоса Vickers. Позиционный шток, в свою очередь, непосредственно соединен через дифференциальную передачу с плавающим кольцом радиально-поршневого насоса Hele Shaw. Величина хода поршня пропорциональна порядку рулевого управления двойного управления гироскопом. Кроме того, предусмотрены ограничения для предотвращения чрезмерного хода поршня.
Линейная гидравлическая силовая установка
Поршневая операция
Управляющим элементом линейной гидравлической силовой установки является гидрораспределитель, представляющий собой четырехходовой клапан с электромагнитным управлением и пилотным управлением. Управляющий сигнал с рулевой стойки включает один из соленоидов в клапане. Соленоид отодвигает золотник пилота от центра, таким образом направляя управляющую жидкость для смещения золотника главного клапана. Это соединяет одну сторону цилиндра с входным давлением, а другую сторону с обратной линией, заставляя шток поршня и, следовательно, плавающее кольцо насоса Hele Shaw двигаться. Направление потока и, следовательно, направление движения управляющего цилиндра будет зависеть от того, на какой соленоид подается питание от рулевого управления.
Это соединяет одну сторону цилиндра с входным давлением, а другую сторону с обратной линией, заставляя шток поршня и, следовательно, плавающее кольцо насоса Hele Shaw двигаться. Направление потока и, следовательно, направление движения управляющего цилиндра будет зависеть от того, на какой соленоид подается питание от рулевого управления.
Параллельная рейка, которая активирует потенциометр повторного возврата и концевые выключатели, прикреплена к поршню и перемещается вместе с ним.
Когда шток поршня достигает заданного положения, электрический контрольный сигнал уравновешивает сигнал приказа, тем самым обесточивая ходовой клапан.
Перепускной клапан в силовом агрегате открывается, когда автоматическое или ручное электрическое управление не используется, позволяя маслу свободно течь из одного конца цилиндра силового агрегата в другой. В этом случае рулевым механизмом корабля можно управлять с помощью отдельных средств, при этом гидравлический силовой агрегат все еще подключен. Когда система находится под напряжением, гидравлическое давление закрывает клапан, чтобы разрешить работу. Перепускной клапан представляет собой четырехходовой клапан с гидравлическим приводом и пружинным смещением, для работы которого требуется давление не менее 50 фунтов на квадратный дюйм.
Когда система находится под напряжением, гидравлическое давление закрывает клапан, чтобы разрешить работу. Перепускной клапан представляет собой четырехходовой клапан с гидравлическим приводом и пружинным смещением, для работы которого требуется давление не менее 50 фунтов на квадратный дюйм.
Хотя байпасный клапан четырехходового типа, его использование в этой системе ограничено либо открытым, либо закрытым положением. Это достигается путем блокировки одного набора портов.
Когда система не работает или в случае, если она должна выйти из строя, перепускной клапан позволяет маслу течь с одной стороны управляющего цилиндра на другую, так что шток поршня может перемещаться с помощью альтернативного средства рулевого управления, такого как как трюковое колесо или телемотор. Когда насос включается для запуска системы в работу, в системе сразу же создается давление благодаря обратному клапану. Это давление закрывает перепускной клапан, позволяя управляющему цилиндру реагировать на работу направляющего клапана.
Концевые выключатели, реле и следящий потенциометр
Гидравлический силовой агрегат содержит две пары концевых выключателей, обозначенных как внутренние концевые выключатели и внешние концевые выключатели. Внутренние концевые выключатели обычно ограничивают электрическую работу до десяти градусов движения руля в любом направлении, чтобы оптимизировать работу при автоматическом рулевом управлении. Таким образом, когда сигнал ошибки приводит к тому, что цилиндр выходит за пределы умеренных углов поворота руля, внутренний концевой выключатель размыкает цепь к возбужденному соленоиду направляющего клапана. Внешние концевые выключатели настроены на размыкание цепи соленоида в положении руля направления. Кроме того, эти переключатели всегда настроены так, чтобы поршень не ударялся о механические упоры. В ручно-электрическом режиме рулевого управления реле в силовом агрегате, управляемое с рулевого поста, замыкает цепи на внутренних концевых выключателях и допускает полный руль направления до угла, определяемого внешними концевыми выключателями.
В нормальном режиме обе пары концевых выключателей замкнуты. На тот или иной соленоид гидрораспределителя подается управляющий сигнал от С1 до С+ или от С2 до С+ в зависимости от направления перекладки руля. Клапан работает, чтобы направить масло для перемещения поршня и штока. Это также перемещает прикрепленную стойку. Рейка приводит в движение шестерню, которая через зубчатую передачу соединяется с кулачковым валом концевого выключателя. Шестерни выбираются на заводе в соответствии с ходом штока поршня, так что кулачковый вал поворачивается на 270° при перемещении штока из одного положения в другое. Кулачки устанавливаются на валу во время установки для конкретных ограничений, требуемых конкретным судном.
Концевые выключатели LHPU
Внутренние концевые выключатели
Когда шток поршня перемещается достаточно, чтобы создать угол руля около 10°ee в любую сторону от миделя, кулачок последовательно с электромагнитным клапаном, находящимся под напряжением, размыкает концевой выключатель, и рулевой механизм удерживается в этом положении до тех пор, пока не будет подан управляющий ток к другому соленоиду.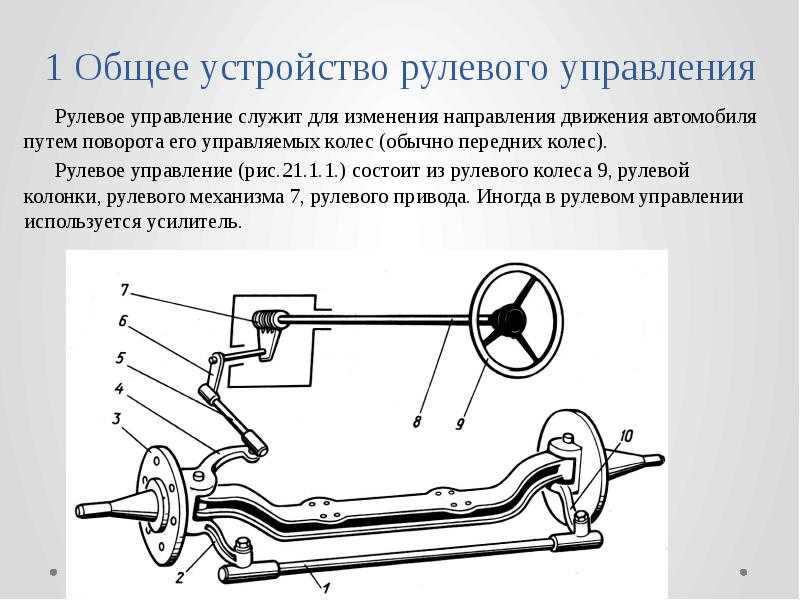 Если требуется менее 10 °ee руля, внутренний концевой выключатель не сработает.
Если требуется менее 10 °ee руля, внутренний концевой выключатель не сработает.
Внешние концевые выключатели
В ручном электрическом режиме работы кулачковый переключатель на рулевой стойке включает реле обхода внутреннего ограничения в силовом агрегате, когда рулевой подает руль примерно на 8°ee. Ток, подаваемый от LL1 к C+, заставляет катушку реле R1 замыкать контакты R1-1 и R1-2 на внутренних концевых выключателях. Таким образом, хотя кулачки размыкают внутренние концевые выключатели, каждый контур от C1 или C2 через соленоид клапана до C+ остается закрытым. За несколько секунд до максимального хода кулачок размыкает нормально замкнутый внешний концевой выключатель мгновенного действия, обесточивая соленоид гидрораспределителя и удерживая рулевой механизм в этом положении до тех пор, пока рулевой не прикажет вернуть руль на мидель. Таким образом, внешние концевые выключатели определяют жесткость руля направления и предотвращают выход силовой установки за механические пределы хода.
Распределительный вал также приводит в движение вращающийся грязесъемник маслонаполненного потенциометра с проволочной обмоткой сопротивлением 5000 Ом. Этот потенциометр точно расположен так, что, когда шток поршня находится в среднем положении, скользящий элемент потенциометра имеет среднее сопротивление. Таким образом, потенциометр выдает электрический сигнал, пропорциональный положению силового агрегата, для подключения к следящей цепи автоматического или ручного электрического рулевого управления. Другими словами, этот потенциометр повторного возврата генерирует дополнительный сигнал, который отправляется на рулевую стойку. Соленоид направляющего клапана обесточивается, когда следящий сигнал отменяет управляющий сигнал.
На обоих концах поршневого штока силового агрегата установлена вилка, одна из которых механически соединена через дифференциальную передачу с крейцкопфом роторного насоса Hele Shaw. Силовой агрегат способен передавать усилие около 6800 фунтов в виде толчка или тяги.