Типы подвесок остова гусеничных тракторов
Подвеска соединяет остов гусеничного трактора с опорными катками, обеспечивая плавность хода. Широкое применение для гусеничных тракторов сельскохозяйственного назначения нашли полужёсткая и упругая балансирная подвески [рис. 1].
Рис. 1. Типы подвесок гусеничных тракторов.
А) – Полужёсткая подвеска;
Б) – Полужёсткая подвеска;
В) – Упругая балансирная подвеска;
1) – Ось;
2) – Рессора;
3) – Рама гусеничной тележки;
4) – Опорные катки;
5) – Рычаги подвески с торсионами;
6) – Рычаги подвески с торсионами;
7) – Опорные катки;
8) – Амортизатор.
Полужёсткая трёхточечная подвеска [рис. 1, А] используется на тракторах Т-4А, Т-130, Т-100М. Остов данных гусеничных тракторов опирается на гусеничные тележки через общую ось (1) в задней части (общая точка), а в передней части – через листовую рессору (2), которая крепится к остову трактора перпендикулярно его оси и опирается на каждую из тележек (вторая и третья точки подвески).
Оси опорных катков в полужёсткой подвеске жёстко крепятся к рамам гусеничных тележек. Данное крепление позволяет максимально сократить расстояние между остями катков, за счёт чего улучшается равномерность распределения давлений на мягких грунтах. Однако большая жёсткость подвески ограничивает транспортные и рабочие скорости движения гусеничного трактора (не превышают 7-10 км/ч).
Упругая балансирная подвеска смонтирована на тракторах Т-150, ДТ-175, ДТ-75Б. При данной подвеске рама гусеничного трактора опирается на четыре подрессоренные каретки. В состав каждой каретки входит пара балансиров (12) [рис. 2, А], смонтированных на цапфах поперечных брусьев рамы.
Рис. 1. Ходовая часть гусеничного трактора Т-150.
А) – Устройство;
Б) – Рама;
В) – Схема регулировки натяжения гусеничной цепи;
Г) – Схема работы гидроамортизатора;
1) – Лонжерон рамы трактора;
2) – Направляющее колесо;
3) – Кронштейн направляющего колеса;
4) – Коленчатая ось направляющего колеса;
5) – Цилиндр гидронатяжителя гусеницы;
6) – Опорные катки;
7) – Гидроамортизатор;
8) – Кронштейн промежуточного звена амортизатора;
9) – Поддерживающий ролик;
10) – Большая и малая пружины балансира;
11) – Кронштейн поддерживающего ролика;
12) – Балансир;
13) – Большая и малая пружины амортизатора;
14) – Поперечный брус рамы трактора;
15) – Защитный козырёк;
16) – Упорный кронштейн амортизатора;
17) – Ведущее колесо;
18) – Конечная передача;
19) – Звено гусеницы;
20) – Беговая дорожка звена гусеницы;
21) – Направляющая реборда звена гусеницы;
22) – Палец гусеницы;
23) – Стопорное кольцо;
24) – Шайба;
25) – Шток;
26) – Уплотнение штока;
27) – Дроссельное отверстие;
28) – Перепускной клапан;
29) – Кожух;
30) – Цилиндр;
31) – Подводящий канал;
32) – Клапан;
33) – Дроссельное отверстие;
34) – Компенсационный бачок.
На тракторе Т-150 балансиры изготовлены одинаковыми и смонтированы на паре осей, которые установлены в поперечном брусе рамы. Каретки вверху распираются пружинами (10), поглощающими все толчки, которые в процессе движения трактора воспринимают опорные катки и не передают их на остов трактора. Однако при этом происходит возникновение собственных колебаний пружин каретки, ухудшающих плавность движения гусеничного трактора. С целью устранения данного недостатка в балансирах устанавливаются гидроамортизаторы (7), схема функционирования которых показана на [рис. 2, Г]. Поглощение энергии колебания пружин осуществляется за счёт перетекания жидкости через маленькие отверстия из одной полости амортизатора в другую.
Находящаяся в полости (А) жидкость, при растяжении амортизатора испытывает сжатие и перетекает в полость (Б) через дроссельные отверстия (27). За счёт формирующегося разряжения в полости (Б) компенсационный клапан (32) открывается, и жидкость по маслопроводящему каналу (31) из полости (П) компенсационного бачка (34) поступает в полость (Б) цилиндров в объёме, равном объёму той части штока (25), которая в данный момент выводится из рабочего цилиндра.
При сжатии гидроамортизатора (нагружении каретки) шток (25) движется в обратную сторону и находящаяся в полости (Б) жидкость перетекает в полость (А) через те же дроссельные отверстия (27). При этом жидкость в объёме, равном объёму вводимой части штока, вытесняется в полость (П) через отверстие (33).
Перепускной клапан (28), установленный в штоке, при больших усилиях сжатия дополнительно открывает ряд отверстий для перепуска жидкости из полости (А) в полость (Б).
Катки в упругой подвеске перемещаются в вертикальной плоскости относительно остова, за счёт чего обеспечивается лучшее подрессоривание гусеничного трактора, дающее возможность работать на больших скоростях (до 16 км/ч и выше), а также улучшаются сцепные свойства на твёрдых грунтах. Однако вследствие увеличенного шага расстановки опорных катков происходит неравномерное распределение силы тяжести гусеничного трактора по длине опорной поверхности движителя, за счёт чего повышается удельное давление на грунт.
17*
Похожие материалы:
Классификация и назначение экскаваторов
Главная / Информация / Классификация и назначение экскаваторовЭкскаваторы по назначению и мощности можно разделить на несколько групп. Если такая машина как экскаватор может производить все операции упорядоченно, определенными циклами через некоторые временные промежутки, – это машины цикличного, т.е. прерывного действия, они бывают одноковшовые. Если же экскаватор может производить все операции одновременно, то его относят к машинам непрерывного действия, они бывают фрезерные, скребковые, многоковшовые.
Много- и одноковшовые экскаваторы могут быть плавучие и сухопутные. Последние производят с гусеничным, пневмоколесным, рельсовым и шагающим ходовым устройством. В движение механизмы экскаватора приводит двигатель, который может быть электрическим, паровым, карбюраторным, дизельным.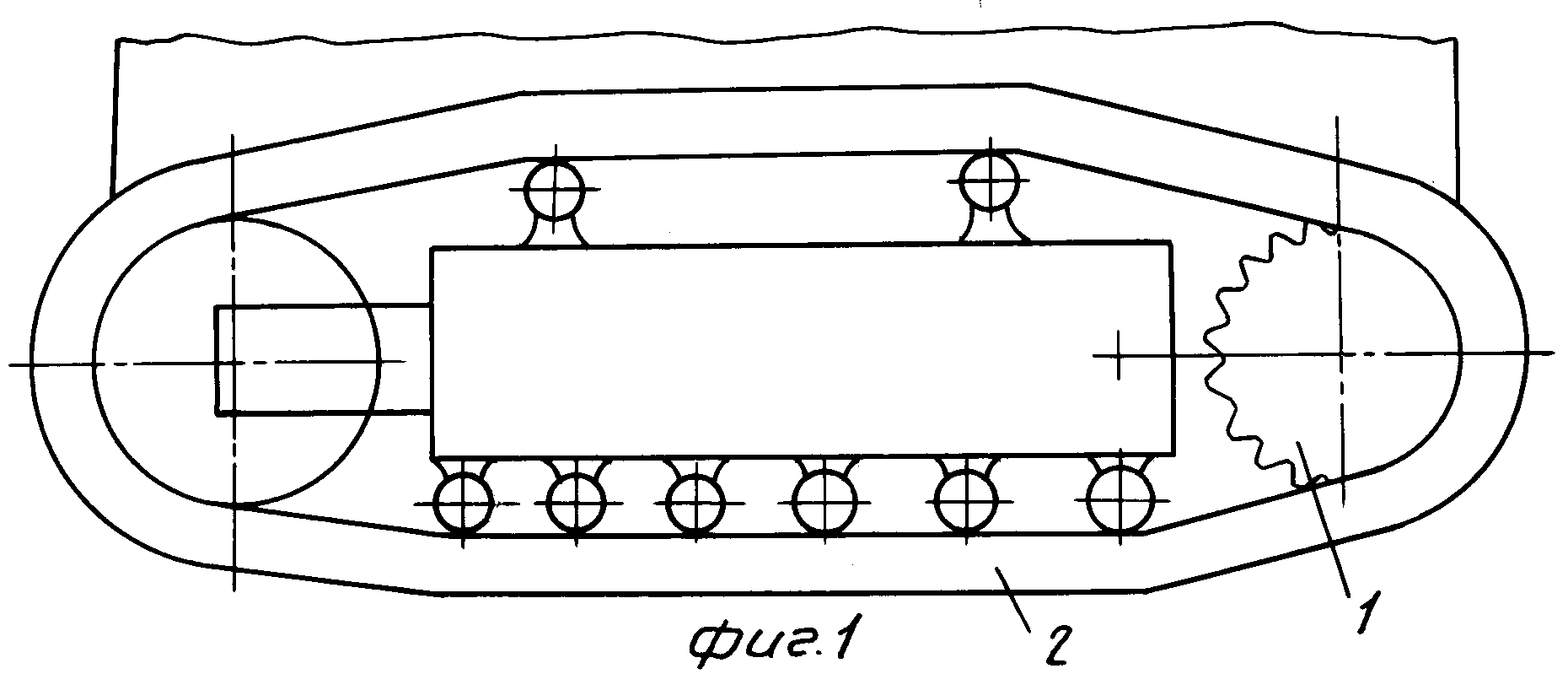 Выбор двигателя будет зависеть от условий, в которых предстоит эксплуатация машины. Привод в экскаваторе может быть одно- и многомоторный, а также приводы подразделяют на: гидравлические, механические, гидромеханические, электрические, смешанные.
Выбор двигателя будет зависеть от условий, в которых предстоит эксплуатация машины. Привод в экскаваторе может быть одно- и многомоторный, а также приводы подразделяют на: гидравлические, механические, гидромеханические, электрические, смешанные.
Одноковшовые экскаваторы бывают строительно-универсальные с емкостью ковша до 3 кубических метров, их используют для земляных работ. У карьерных экскаваторов емкость ковша 2-8 кубических метра, они применяются при разработке угольных и рудных месторождений. И еще одна категория – вскрышные экскаваторы с ковшами более 6 метров кубических, используемые для вскрыши, т.е. для разработки верхних слоев пород. Также одноковшовые экскаваторы применяют с различным дополнительным оборудованием. Это может быть лопата (обратная или прямая), драглайн, крановая стрела с грейфером или крюковой подвеской, копрами для забивания свай и т.п.
Одноковшовый универсальный экскаватор используют для выемки и перемещения грунта и прочих материалов, погрузочных сваебойных и иных работ с помощью навесного оборудования. Высокая проходимость и хорошая устойчивость обеспечиваются за счет гусеничного ходового оборудования. Продажа гусеничных экскаваторов стала пользоваться повышенным спросом, особенно после того, как появились модели на пневмоколесном ходу, оснащенные небольшим ковшом и обладающие повышенной подвижностью и маневренностью.
Высокая проходимость и хорошая устойчивость обеспечиваются за счет гусеничного ходового оборудования. Продажа гусеничных экскаваторов стала пользоваться повышенным спросом, особенно после того, как появились модели на пневмоколесном ходу, оснащенные небольшим ковшом и обладающие повышенной подвижностью и маневренностью.
От того, на какой угол способно поворачиваться в горизонтальной плоскости ходовое оборудование, экскаватор будет полноповоротным и неполноповоротным. У первой модели этот угол может составлять 360°. В зависимости от того, какое рабочее навесное оборудование будет применяться, используют гибкую или жесткую подвеску рабочего органа. Выбор инструментов будет зависеть от характера предполагаемых работ. Лопата у экскаватора может быть прямой и обратной. Первой работают с грунтом выше уровня, на котором стоит экскаватор, а второй – если ниже уровня.
Немного о том, какая система индексации используется для основной  Аренда экскаватора»>характеристики экскаваторов. Четырьмя основными цифрами обозначаются размерная группа машины, тип ходового устройства экскаватора, конструктивное исполнение рабочего оборудования, номер по порядку.
Аренда экскаватора»>характеристики экскаваторов. Четырьмя основными цифрами обозначаются размерная группа машины, тип ходового устройства экскаватора, конструктивное исполнение рабочего оборудования, номер по порядку.
Производительность одноковшового экскаватора будет зависеть от конструкции машины, уровня организации производства работ с землей, состоянием и качеством забоя и грунта, квалификации машиниста, технического состояния машины.
Многоковшовый экскаватор – это землеройная машина, у которой в качестве рабочего органа установлена цепь многоковшовая или роторное колесо с ковшами. Его используют для дорожно-строительных работ, для рытья каналов, траншей, котлованов, прокладке трубопроводов. Если сравнивать роторные экскаваторы с цепными траншейными, то у первых производительность и КПД намного больше.
Корпоративные новости · Группа компаний «УЛК»
Виктор Кулаков, начальник цеха сортировки сухих пиломатериалов №1 и №2 Устьянского ЛПК – о семейном хобби, карьере в УЛК и первом опыте руководителя
Группа компаний УЛК дает отличный шанс для карьерного роста молодым и талантливым специалистам, которые по-настоящему любят свое дело и разбираются в нем. Один из ярких примеров – Виктор Кулаков, который за 10 лет прошел путь от обычного рабочего цеха строжки до начальника цеха сортировки сухих пиломатериалов.
Один из ярких примеров – Виктор Кулаков, который за 10 лет прошел путь от обычного рабочего цеха строжки до начальника цеха сортировки сухих пиломатериалов.
– Виктор, расскажите, откуда вы родом?
– Я родился и вырос в Устьянском районе в селе Шангалы. Там окончил 11 классов Устьянской средней школы, после чего отправился в армию для прохождения военной службы.
– Как вы связали свою жизнь с ГК УЛК?
– Из Армии я пришел зимой 2010 года, а уже 3 января 2011 года устроился на завод Устьянского ЛПК специалистом цеха строжки – это была моя первая серьезная работа. Занимался торцовкой и раскладкой пило- материалов по сортам – трудился так примерно год. Затем принимал участие в строительстве цеха сортировки сухих пиломатериалов №1, где после запуска меня назначили оператором сортировочной линии на участке ШФМ. Работа мне очень нравилась, с головой погружался во все производственные процессы.
– Откуда у вас такая увлеченность лесной промышленностью?
– Любовь к лесу мне привил мой отец – Александр Витальевич. Он работал у одного из частных предпринимателей, был мастером в лесу и руководил целой бригадой. С юношеских лет брал меня с собой на делянку, где познакомил со всеми процессами заготовки древесины. Там я заработал свои первые деньги. Время прошло, а сфера деятельности, можно сказать, не изменилась.
Он работал у одного из частных предпринимателей, был мастером в лесу и руководил целой бригадой. С юношеских лет брал меня с собой на делянку, где познакомил со всеми процессами заготовки древесины. Там я заработал свои первые деньги. Время прошло, а сфера деятельности, можно сказать, не изменилась.
– Правда, что первый раз вы стали начальником цеха сортировки в 22 года? Такой шанс дается не каждому. Какие чувства вы испытали в тот момент?
– Больше года я успешно отработал оператором сортировочной линии. Руководство заметило меня. В 2013 году я, молодой и «зеленый», впервые попробовал свои силы в должности руководителя. Представьте, в 22 года у меня в подчинении было более 100 человек, колоссальная ответственность для молодого, хоть и знающего свое дело, парня. В итоге возраст и неопытность все-таки сыграли свою роль, и через год я покинул должность начальника цеха.
– После этого вы успели поработать на погрузке пиломатериалов и даже водителем фронтального погрузчика. Этот опыт, когда вы вернулись к должности начальника цеха сортировки, как-то помог в управлении цехом?
Этот опыт, когда вы вернулись к должности начальника цеха сортировки, как-то помог в управлении цехом?
– Да, я на собственном опыте прошел все этапы работы в цехе, и теперь, как никто другой, понимаю все нюансы трудовой деятельности своих подчиненных. Много общаюсь с операторами – это мой основной принцип в управлении коллективом. Интересуюсь, как складывается их работа, а если моя помощь нужна молодому специалисту, то участвую в процессе обучения. Такой подход позволяет добиться взаимопонимания и слаженности в трудовом коллективе, помогает избежать конфликтов и обеспечить хорошую производительность.
– Какими, на ваш взгляд, личными качествами должен обладать хороший руководитель?
– В первую очередь хороший руководитель обязан быть трудолюбивым. Он должен с головой погрузиться в производство, которым управляет, чтобы знать каждый агрегат и каждый болтик.
Во-вторых, хорошее качество для руководителя – это коммуникабельность и справедливое отношение к подчиненным. Если это есть, то коллектив всегда будет поддерживать тебя.
Если это есть, то коллектив всегда будет поддерживать тебя.
– Какое самое важное решение вы приняли, находясь на должности руководителя цеха?
– В том году с работниками цеха решили реализовать совместную идею, которая позволила значительно увеличить объемы сортировки продукции. Чтобы уменьшить ручной труд операторов и автоматизировать работу цеха, мы внедрили на линию дополнительную штабелеформирующую машину.
– Расскажите немного о своей семье. Как познакомились с супругой?
– Со своей будущей женой я познакомился еще в школе. Мы много общались, пересекались на сельских дискотеках. А после армии в 2011 году сыграли свадьбу. Быстро время пролетело, совсем недавно в июле отметили годовщину – 10 лет совместной жизни. Супруга, как и я, работает в ГК УЛК. Вместе мы воспитываем двух сыновей, построили дом на моей родине в селе Шангалы.
– Чем занимаетесь в свободное время?
– С семьей предпочитаем не сидеть дома, а активно проводить время.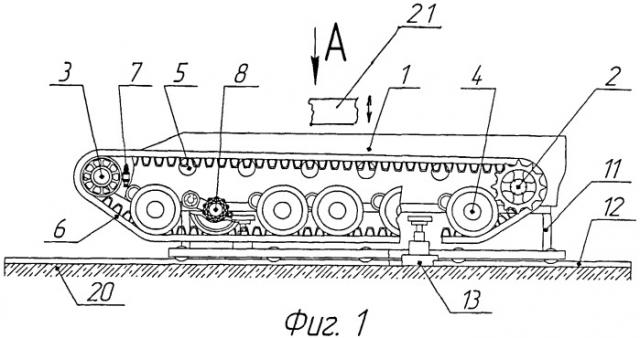 Когда появляется возможность, выбираемся на природу. Наше любимое место – это Васильевское озеро, которое расположено в 15 километрах от Шангал. Уезжаем туда на пару дней, рыбачим, катаемся на лодке и отдыхаем. Иногда удается поохотиться. Также вся семья активно занимается спортом, на выходных зимой катаемся на лыжах, ватрушках и снегоходах. С женой два раза в неделю ездим в фитнес-зал в Березнике, держим себя в форме.
Когда появляется возможность, выбираемся на природу. Наше любимое место – это Васильевское озеро, которое расположено в 15 километрах от Шангал. Уезжаем туда на пару дней, рыбачим, катаемся на лодке и отдыхаем. Иногда удается поохотиться. Также вся семья активно занимается спортом, на выходных зимой катаемся на лыжах, ватрушках и снегоходах. С женой два раза в неделю ездим в фитнес-зал в Березнике, держим себя в форме.
Еще после свадьбы, когда возник жилищный вопрос, передо мной встал выбор – квартира или дом. Мы с женой выбрали второй вариант и не пожалели ни разу. Почти каждый день после работы стараюсь уделять этому хотя бы час.
Каких-то далеких планов не привык строить. Я хожу на любимую работу, путешествую и активно провожу время со своей семьей. Что еще нужно для счастья!
границ | Осведомленность о местности с помощью гусеничного автомобиля с бортовым поворотом и пассивной независимой подвеской
1.
 Введение
Введение В течение последнего десятилетия было разработано несколько роботизированных решений для поддержки людей, занятых в сельскохозяйственной и промышленной деятельности, например, при опрыскивании, добыче полезных ископаемых, уборке урожая, удобной транспортировке и мониторинге растений при тяжелых режимах работы. Более того, использование большого набора датчиков, таких как камеры RGB, лазеры, GPS и инерционные датчики, позволяет роботам адаптировать свою систему к окружающей среде, обрабатывая входные данные по большому набору данных (Narvaez et al., 2017). В любом случае, хотя большинство предыдущих исследований внедорожных мобильных роботов сосредоточено на обнаружении препятствий (Schaefer et al., 2005), планировании пути (Elfes et al., 1999) и оценке положения (Henson et al., 2008), не так много внимания было уделено взаимодействию между роботом и ландшафтом и тому, как это взаимодействие влияет на производительность транспортного средства во время обычных операций. Несомненно, в большинстве суровых условий эксплуатации вне помещений классификация и характеристика местности являются ключом к автономности и безопасности робота: правильная оценка особенностей местности позволяет транспортному средству оптимизировать скорость и крутящий момент и, в частности, избегать опасных ситуаций. условия, которые могут повредить его двигательную систему или поставить под угрозу сам автомобиль.В качестве примечательного примера, определение типа местности имеет решающее значение для безопасности марсоходов для исследования планет, таких как марсоходы NASA / JPL (Rothrock et al., 2016). Подходы, описанные в литературе, используемые для определения характеристик местности, обычно требуют автономной обработки и специальных датчиков и устройств, которые могут быть дорогими и сложными в обращении в суровых условиях (Ojeda et al., 2006). Примеры экстероцептивного восприятия можно найти у Milella et al. (2015), где была представлена комбинация радара и монокулярного зрения в рамках самообучающейся статистической системы для классификации сельскохозяйственных угодий.
Несомненно, в большинстве суровых условий эксплуатации вне помещений классификация и характеристика местности являются ключом к автономности и безопасности робота: правильная оценка особенностей местности позволяет транспортному средству оптимизировать скорость и крутящий момент и, в частности, избегать опасных ситуаций. условия, которые могут повредить его двигательную систему или поставить под угрозу сам автомобиль.В качестве примечательного примера, определение типа местности имеет решающее значение для безопасности марсоходов для исследования планет, таких как марсоходы NASA / JPL (Rothrock et al., 2016). Подходы, описанные в литературе, используемые для определения характеристик местности, обычно требуют автономной обработки и специальных датчиков и устройств, которые могут быть дорогими и сложными в обращении в суровых условиях (Ojeda et al., 2006). Примеры экстероцептивного восприятия можно найти у Milella et al. (2015), где была представлена комбинация радара и монокулярного зрения в рамках самообучающейся статистической системы для классификации сельскохозяйственных угодий. Локальный дескриптор, полученный в результате реконструкции трехмерной среды, был предложен Bellone et al. (2018) для оценки неровностей местности. Лазерные дальномеры и спектральные датчики изображения также были предложены для наземной идентификации, соответственно, в Broten et al. (2012) и Jin et al. (2015).
Локальный дескриптор, полученный в результате реконструкции трехмерной среды, был предложен Bellone et al. (2018) для оценки неровностей местности. Лазерные дальномеры и спектральные датчики изображения также были предложены для наземной идентификации, соответственно, в Broten et al. (2012) и Jin et al. (2015).
Другие исследователи исследовали методы классификации местности с использованием проприоцептивного зондирования. Например, методы классификации местности на основе ускорения были введены для планетарных вездеходов (Brooks and Iagnemma, 2005) и роботов для пересеченной местности (DuPont et al., 2008). Однако автомобили, принятые для испытаний, основаны на колесах и, как правило, не оснащены системами подвески (Masha et al., 2017; Reina et al., 2017a). Этот последний аспект можно рассматривать как ограничивающий фактор, поскольку неровности, с которыми можно столкнуться на такой местности, как вспаханная и каменистая почва или гравий, могут создавать непреднамеренные механические нагрузки на раму робота и датчики.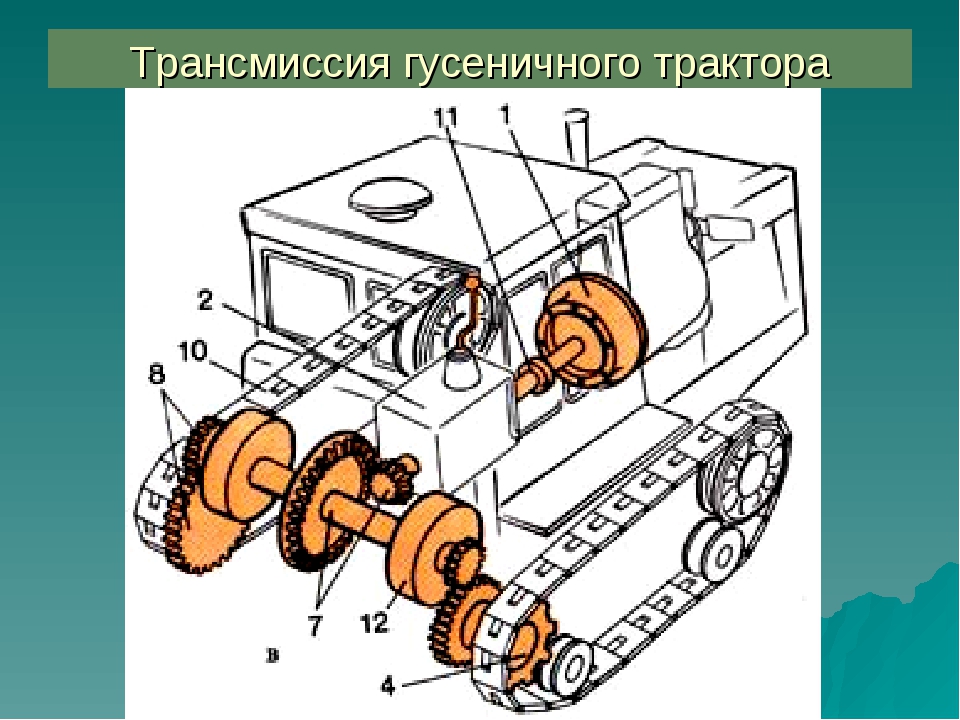
В этом исследовании предлагается метод определения характеристик местности с использованием гусеничного транспортного средства с бортовым поворотом и пассивной подвеской и путем определения набора параметров, основанных на физическом понимании механизмов, лежащих в основе взаимодействия транспортного средства с местностью, а именно, токов приводных двигателей, эквивалентная дорожка скольжения и спектральная плотность мощности, связанная с электрическими токами и вертикальными ускорениями тела.Первые два параметра жестко связаны с мощностью, необходимой транспортному средству для движения по конкретной местности, т.е. песок создает большее сопротивление движению, чем асфальт; эквивалентная гусеница скольжения может использоваться для измерения величины проскальзывания, связанного с транспортным средством с противоскользящим управлением во время маневра рулевого управления. Расширенный фильтр Калмана (EKF) используется для поддержки оценки на основе модели, чтобы обеспечить онлайн-оценку скольжения; фильтр использует в качестве входных данных разницу между скоростями левого и правого гусениц, полученную с помощью поворотных энкодеров, установленных на обеих звездочках гусениц, и скорость движения транспортного средства, измеренную инерциальным блоком.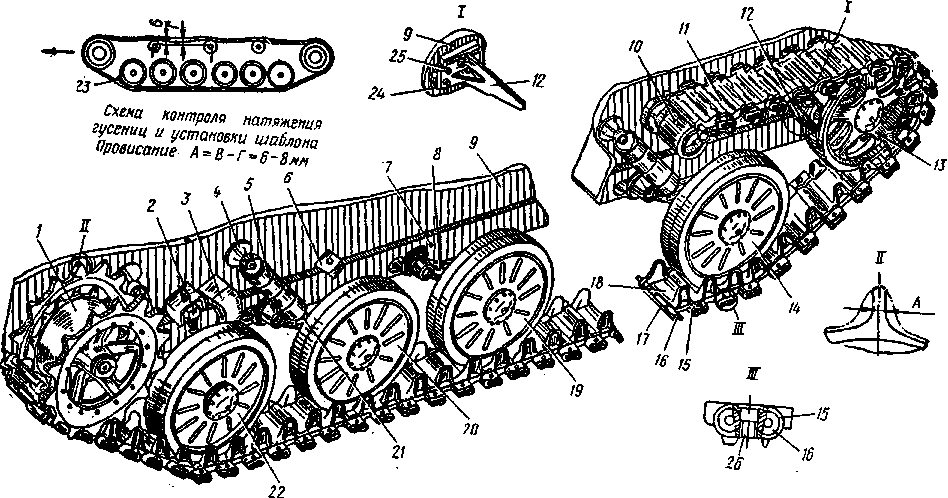 Спектральная плотность мощности (PSD) вертикального ускорения описывает мощность сигнала как функцию частоты на единицу частоты (Li and Sandu, 2013). В нашем исследовании вертикальное движение робота контролируется амортизатором, установленным на каждом рычаге подвески.
Спектральная плотность мощности (PSD) вертикального ускорения описывает мощность сигнала как функцию частоты на единицу частоты (Li and Sandu, 2013). В нашем исследовании вертикальное движение робота контролируется амортизатором, установленным на каждом рычаге подвески.
Следуя бумажной организации, раздел 2 иллюстрирует модель транспортного средства, использованную для этого исследования. В разделе 3 исследуется, как транспортное средство взаимодействует со своей опорной поверхностью при прямом и поворотном движении, и дается описание метода PSD.В разделе 4 представлены соображения и экспериментальные результаты, полученные на различных поверхностях с использованием гусеничного вездехода для проверки предлагаемого подхода. Раздел 5 завершает статью.
2. Материалы и методы
2.1. Аппаратная архитектура
Автомобиль, использованный для этой исследовательской работы, представляет собой гусеничный робот с бортовым поворотом под названием «maXXII», который разрабатывается в Университете Саленто. Он оснащен пассивной подвеской, как показано на рисунке 1. Вес автомобиля составляет Вт, = 40 кг, а его номинальная ширина колеи равна 0.95 м. Каждая гусеница (A) имеет ширину около 0,18 м и высоту 0,16 м и состоит из непрерывной полосы протекторов из синтетической резины для бездорожья, усиленной стальной проволокой для обеспечения хорошего сцепления. практически на всех поверхностях. Каждая ходовая часть имеет форму параллелограмма с более продвинутым верхним передним колесом, чтобы помочь транспортному средству преодолевать препятствия и подниматься по лестнице. Каждая гусеничная звездочка (B) приводится в движение двигателем постоянного тока 12 В с коробкой передач с максимальным выходным крутящим моментом 40 Нм и максимальной угловой скоростью 70 об / мин для общей выходной мощности около 400 Вт.Набор датчиков включает в себя два оптических энкодера, установленных на каждом валу коробки передач, два датчика тока, RTK GPS и инерциальный измерительный блок с 3-осевым гироскопом, акселерометром и магнитометром для ориентации в соответствии с системой отсчета NED (север, восток, вниз).
Он оснащен пассивной подвеской, как показано на рисунке 1. Вес автомобиля составляет Вт, = 40 кг, а его номинальная ширина колеи равна 0.95 м. Каждая гусеница (A) имеет ширину около 0,18 м и высоту 0,16 м и состоит из непрерывной полосы протекторов из синтетической резины для бездорожья, усиленной стальной проволокой для обеспечения хорошего сцепления. практически на всех поверхностях. Каждая ходовая часть имеет форму параллелограмма с более продвинутым верхним передним колесом, чтобы помочь транспортному средству преодолевать препятствия и подниматься по лестнице. Каждая гусеничная звездочка (B) приводится в движение двигателем постоянного тока 12 В с коробкой передач с максимальным выходным крутящим моментом 40 Нм и максимальной угловой скоростью 70 об / мин для общей выходной мощности около 400 Вт.Набор датчиков включает в себя два оптических энкодера, установленных на каждом валу коробки передач, два датчика тока, RTK GPS и инерциальный измерительный блок с 3-осевым гироскопом, акселерометром и магнитометром для ориентации в соответствии с системой отсчета NED (север, восток, вниз).
Рисунок 1 . Первая версия машины «maXXII», использованная для этой исследовательской работы.
2.2. Подвесная система
Пассивная система подвески автомобиля выполняет несколько задач, таких как поддержание контакта между резиновыми гусеницами и поверхностью местности, обеспечение устойчивости автомобиля и защита рамы автомобиля от всех ударов, вызванных неровностями местности.Он работает вместе с резиновой прокладкой, холостыми колесами гусеницы, рамой и рычагами подвески, обеспечивая устойчивость и каким-то образом физически отделяя корпус транспортного средства от резиновой прокладки транспортного средства. Каждая гусеница включает пять холостых колес (A) и четыре однорычажных рычажных механизма подвески (B), поворотные шарниры которых ( O 1 , O 2 , O 3 ) устанавливаются непосредственно на Рама робота с четырьмя независимыми амортизаторами, которые позволяют одному колесу двигаться вверх и вниз с минимальным воздействием на другое колесо, как показано на рисунке 2. Система подвески была разработана для обеспечения достаточного вертикального движения колес, чтобы автомобиль мог преодолевать неровности местности. Когда холостое колесо соприкасается с неровностями, механизм подвески может допускать достаточное вертикальное движение, чтобы колесо не продолжало двигаться вверх, захватывая раму с такой же высокой скоростью, что вызывает большое вертикальное ускорение вдоль оси z; этот аспект очень важен, потому что он снижает шум и вибрацию во время захвата датчика.На рисунке 3 представлен случай, когда холостое колесо движется в вертикальном направлении и достигает максимальных значений в грани (вверх), где H, = 0,10 м, и отбоя (вниз), при H, = — 0,05 м. Типичная конфигурация подвески представлена на рисунке 4, где можно увидеть, что происходит, когда транспортное средство пересекает небольшую неровность S ; в этом случае, как только транспортное средство сталкивается с неровностью, холостое колесо A, вынуждено двигаться вверх, а затем второе холостое колесо B .
Система подвески была разработана для обеспечения достаточного вертикального движения колес, чтобы автомобиль мог преодолевать неровности местности. Когда холостое колесо соприкасается с неровностями, механизм подвески может допускать достаточное вертикальное движение, чтобы колесо не продолжало двигаться вверх, захватывая раму с такой же высокой скоростью, что вызывает большое вертикальное ускорение вдоль оси z; этот аспект очень важен, потому что он снижает шум и вибрацию во время захвата датчика.На рисунке 3 представлен случай, когда холостое колесо движется в вертикальном направлении и достигает максимальных значений в грани (вверх), где H, = 0,10 м, и отбоя (вниз), при H, = — 0,05 м. Типичная конфигурация подвески представлена на рисунке 4, где можно увидеть, что происходит, когда транспортное средство пересекает небольшую неровность S ; в этом случае, как только транспортное средство сталкивается с неровностью, холостое колесо A, вынуждено двигаться вверх, а затем второе холостое колесо B . Чтобы гусеничный ремень оставался натянутым, колесо T тянется вперед под действием пружинного натяжителя, в то время как колесо C опускается, чтобы удерживать ремень в своем положении. Другая типичная конфигурация подвески представлена также на фиг. 5, когда транспортное средство проезжает небольшой неровность S ; в этой ситуации холостое колесо A очень близко к своему нормальному положению, поскольку оно движется в горизонтальной плоскости, в то время как холостые колеса B и C диаметрально противоположны, потому что они пытаются натянуть гусеничный ремень под действием своего удара. поглотители.Ролик натяжителя кажется смещенным наружу, чем в предыдущей конфигурации, потому что холостое колесо D перемещается вверх и снижает натяжение гусеницы впереди, поскольку транспортное средство движется вперед.
Чтобы гусеничный ремень оставался натянутым, колесо T тянется вперед под действием пружинного натяжителя, в то время как колесо C опускается, чтобы удерживать ремень в своем положении. Другая типичная конфигурация подвески представлена также на фиг. 5, когда транспортное средство проезжает небольшой неровность S ; в этой ситуации холостое колесо A очень близко к своему нормальному положению, поскольку оно движется в горизонтальной плоскости, в то время как холостые колеса B и C диаметрально противоположны, потому что они пытаются натянуть гусеничный ремень под действием своего удара. поглотители.Ролик натяжителя кажется смещенным наружу, чем в предыдущей конфигурации, потому что холостое колесо D перемещается вверх и снижает натяжение гусеницы впереди, поскольку транспортное средство движется вперед.
Рисунок 2 . Пассивная подвеска, используемая для каждой гусеницы, состоит из четырех рычагов и четырех амортизаторов.
Рисунок 3 . Однорычажные рычаги подвески с амортизаторами.
Рисунок 4 . Пример конфигурации подвески.
Рисунок 5 . Еще один пример конфигурации подвески.
При рассмотрении упрощенной системы подвески, показанной на рисунке 6, где наличие подрессоренной массы не учитывается и амортизатор имеет жесткость пружины k = 37,27 Н / мм, рычажный механизм имеет массу M 1 = 0,9 кг и длиной L = 0,1 м, холостое колесо имеет радиус r = 0,04 м, массу м = 0,5 кг и жесткость k p , можно записать уравнения для описания поведения подсистемы:
Iθ¨ = -gLcosθ (M12 + m) -k (L0cosα) 2sinθ-L2kpsinθ (1) I = M13L2 + m2r2 + mL2 (2)Рисунок 6 .Простая подсистема, состоящая из однорычажной навески с амортизатором.
Где I — выражение инерции для узла, состоящего из рычажного механизма подвески и холостого колеса, θ — это угол, связанный с угловым смещением рычага, θ¨ его вторая производная, а O — точка поворота для вращения. движение рычажного механизма. Учитывая небольшие колебания, можно переписать выражение в (1) как:
Iθ¨ = -gL (M12 + m) -k (L0cosα) 2θ-L2kpθ (3) fn = 12π6 (k (L0cosα) 2 + kpL2) 2M1L2 + 3mr2 + 6mL2 (4)Последнее уравнение в (4) используется для выражения собственной частоты, связанной с системой подвески.
2.3. Архитектура программного обеспечения
ROS (Операционная система роботов) ROS (2007) используется как для управления транспортным средством, так и для считывания данных со всех датчиков, поскольку позволяет пользователю легко использовать большой набор библиотек, фильтров и инструментов для сбора и обработки поступающих данных. от датчиков; кроме того, пользователь может отправлять команды Twist на транспортное средство и заставлять его двигаться в зависимости от линейных составляющих для скоростей (x, y, z) и от угловых составляющих для угловой скорости для осей (x, y, z).Система работает на процессоре AMD x86 на базе архитектуры SOC и объединяет мощный графический процессор для графической обработки и карту Wi-Fi для удаленного подключения; Операционная система, используемая для экспериментальных тестов, была Ubuntu с сервером ROS для обмена сообщениями с удаленной машиной, используемой в качестве клиента. На рисунке 7 представлена функциональная блок-схема, которая показывает аппаратный уровень, используемый для этой исследовательской работы, который включает инерционный датчик, Mti-300 от XSens, лазерные датчики, LMS-111 от SICK, два оптических энкодера, два датчика Холла, два датчика напряжения. датчики и RTK GPS), модуль Wi-Fi, необходимый для удаленной связи с автомобилем, приемник Bluetooth, который позволяет управлять автомобилем вручную, и двухканальный контроллер двигателя.Конкретный узел ROS был разработан на C ++, чтобы позволить транспортному средству обмениваться данными с датчиками, в то время как другой был разработан для отправки инструкций по перемещению на контроллер двигателя и для отправки полученных значений от датчиков по сети Wi-Fi.
Рисунок 7 . Функциональная блок-схема подержанного автомобиля.
3. Взаимодействие транспортных средств с местностью
3.1. Кинематическая модель автомобиля
Системы вождения, основанные на методе противоскольжения, обычно используются на гусеничных машинах, таких как гусеницы и военные танки для бездорожья.Для этого типа транспортных средств левая и правая гусеницы могут двигаться с разной скоростью как в прямом, так и в обратном режиме в зависимости от угловой скорости и направления звездочки. Из-за сложных площадок гусениц и взаимодействия с рельефом очень сложно точно описать правильную кинематическую модель для мобильных транспортных средств с бортовым поворотом. В этом случае правильное изучение пробуксовки колес играет ключевую роль в кинематическом и динамическом моделировании мобильных транспортных средств с бортовым поворотом; это потому, что информация о проскальзывании может описывать соотношение между угловой скоростью колеса и линейным движением платформы транспортного средства.Приложения для определения местоположения транспортных средств с бортовым поворотом, такие как расчет точного счета, строго полагаются на определение информации о проскальзывании, даже если эту информацию также можно использовать для извлечения и исследования условий местности. На рисунке 8 показаны принципы кинематики транспортного средства с бортовым поворотом при повороте по часовой стрелке с учетом фиксированной системы координат, расположенной справа от транспортного средства, начало которой находится в центре масс транспортного средства. Используя аналогичные свойства треугольника, можно получить уравнение для измерения радиуса поворота, учитывая соотношение между каждой стороной двух треугольников AFC и ADE , как в уравнениях (5) и (6).
v0vi = R + B2R − B2; R = B2 (V0Vi + 1 (v0vi − 1) = B2 (v0 + viv0 − vi) (5) ωz = vo + vi2R = vi (VoV-i-1) B (6)Рисунок 8 . Кинематика гусеничного транспортного средства с противоскользящим управлением во время маневра рулевого управления по часовой стрелке, где B — ширина кузова транспортного средства, V 0 — скорость для внешней колеи, а Vi — скорость для внутренней колеи.
Следует отметить, что радиус поворота, вычисленный в уравнении (5), учитывается в предположении, что не возникают эффекты проскальзывания между холостыми колесами и резиновой гусеницей, а также между резиновыми накладками и землей во время маневра поворота.Однако в реальном мире эффекты заноса и проскальзывания между холостыми колесами, резиновыми гусеницами и поверхностью земли могут наблюдаться для всех транспортных средств с бортовым поворотом, поскольку скольжение необходимо, когда необходимо изменить направление движения транспортного средства. Как следствие, даже при низкой угловой скорости рулевого управления традиционного кинематического подхода недостаточно для правильного описания положения автомобиля в окружающей среде. Разница между скоростью движения транспортного средства и угловой скоростью звездочки может быть получена в результате эффекта продольного скольжения и , который можно хорошо описать как:
i = (1-Vrω) 100; (7) R ′ = B2 (v0 (1-i0) + vi (1-ii) v0 (1-io) -vi (1-ii)) (8), тогда как новая оценка скорости рыскания будет такой, как показано в следующем уравнении (9):
ωz ′ = vi (vo (1-i0) vi- (1-ii)) B (9)3.2. Расширенный фильтр Калмана для эквивалентной дорожки
Несмотря на то, что некоторые исследования полагаются на оценку заноса для определения местоположения транспортного средства (Martinez et al., 2005) и планирование пути (Pentzer et al., 2014), точной связи между эффектом продольного заноса и поведением транспортного средства не установлено. приобрел еще. Конечно, можно учесть почти все эффекты заноса и скольжения как результат взаимодействия между левой и правой резиновыми гусеницами и поверхностью земли; Стоит даже отметить, что эффекты скольжения вносят ошибку в показания кодировщика, которые нельзя использовать для расчета положения транспортного средства.В этой работе понятие эквивалентной гусеницы, ранее введенное авторами (Reina, Galati, 2016), используется в качестве параметра для описания условий местности и классификации его в зависимости от величины проскальзывания, вносимого в систему транспортного средства. Выразив угловую скорость транспортного средства ω z как:
, где B s — оценочная эквивалентная дорожка, можно реализовать наблюдатель состояния, используя EKF, расширив уравнение (10) на модель пространства состояний с дискретным временем (Reina et al., 2017b), где значения параметров меняются как при случайном блуждании:
xk + 1 = xk + ωk; zk + 1 = Hk + 1xk + 1 + vk + 1; (11), где x k = 1/ B s — это переменная состояния в момент времени k , а z k +1 — это наблюдение, т. Е. Ω, и H k +1 — коэффициент измерения, то есть Δ V , в момент времени (k + 1) . k + 1 — это обновленный вектор состояния, а P k +1 — обновленная оценка ковариации ошибки.Оценка пробуксовки рассчитывается только при поворотах, поскольку фильтр отключается при прямолинейном движении из-за отсутствия возбуждения. Следует отметить, что измерение дорожки скольжения остается ограниченным. Когда транспортное средство движется по прямой, числитель и знаменатель в уравнении Bs = ΔVωz-1 являются бесконечно малыми величинами одного и того же порядка, и это приводит к конечным значениям B s .
3.3. Анализ токов двигателя
В отличие от колесных транспортных средств, где часть протектора шины, которая касается поверхности местности, очень мала, в то время как давление на грунт может достигать очень высоких значений, гусеничные транспортные средства характеризуются большим отпечатком пальца на поверхности почвы и более низким уровнем грунта. давление.Кроме того, значение максимального тягового усилия F max , которое может быть создано гусеничным транспортным средством, определяется напряжением сдвига местности, τ max , и площадью контакта A, как показано на следующее уравнение:
Fmax = Aτmax = Ac + Wtanϕ (17), где A = 0,220 м 2 — площадь контакта для обоих путей, а W = 392 N — нормальная нагрузка, а c и ϕ строго связаны с типом местности.Поскольку в электромобилях тяговое усилие, тяга и крутящий момент можно рассматривать как примерно пропорциональные току двигателя постоянного тока:
, где T r — постоянный крутящий момент двигателя, а τ = 60 — передаточное число редуктора. Таким образом, измеряя токи левого и правого электродвигателей при прямолинейном движении с постоянной скоростью, можно получить косвенную оценку сопротивления движению для конкретных условий местности, учитывая геометрию пути и вертикальную нагрузку.Из-за особой конструкции трассы стоит отметить, что амплитуда пиков тока и их период изменяются в соответствии с физическими характеристиками каждой местности. Неровности местности создают различную передачу мощности на гусеницы, требуя большего или меньшего крутящего момента двигателя. На асфальте значения тока двигателя имеют регулярные пики и периоды, так как поверхность почти плоская и не включает шероховатости; в этом случае ограничивается амплитуда электрического тока. На гравийных или каменных почвах значения тока имеют несколько высоких пиков из-за наличия обломков и неровностей, в то время как песчаная местность характеризуется низкими пиками, но наибольшей амплитудой тока.Это происходит потому, что песок имеет более высокую деформируемость, чем асфальт, и обеспечивает большую площадь контакта с гусеницами.
3.4. Вертикальные ускорения
Вибрация гусеничного транспортного средства на местности сильно отличается от реакции транспортного средства на колесах. Итак, для определения точной динамической модели гусеничного транспортного средства очень важно изучить реакцию транспортного средства на вибрацию. В линейных системах существует прямая линейная зависимость между входными и выходными сигналами.Обычно система транспортного средства, которая определяется своей передаточной функцией, учитывает входные данные, представляющие неровности местности, и генерирует выходные данные, представляющие вибрацию транспортного средства. В этом случае функция частотной характеристики может быть определена как отношение выходного сигнала к входному в установившихся условиях. Если можно рассмотреть упрощенную модель с одной степенью свободы для транспортного средства, и входные и выходные значения могут быть выражены в терминах перемещений и вибрации подрессоренной массы, когда выходная мощность рассчитывается в терминах ускорений, тогда модуль передаточной функции H ( f ) выражается следующим образом:
| (H (f) | = (2πf) 211− (ffn) 2 (19), где f — частота возбуждения, а f n — собственная частота системы.Коэффициент демпфирования не включен в уравнение (19), поскольку амортизатор, используемый транспортным средством, работает только с пружиной без амортизаторов. Если передаточная функция конкретной системы известна, то можно выразить соотношение между спектральной плотностью мощности на входе S g ( f ) и спектральной плотностью мощности на выходе S v ( f ) всей системы следующим образом:
Sv (f) = | H (f) 2 | Sg (f) (20)При рассмотрении линейных систем это соотношение показывает, как спектральная плотность выходной мощности связана со спектральной плотностью входной мощности через квадрат модуля передаточной функции.Спектральная плотность мощности определяет, как мощность сигнала распределяется по частоте, и она строго коррелирует с взаимодействием между профилем местности и гусеничной лентой, а также между лентой и гусеничной звездочкой. В отличие от колесных транспортных средств, которые обычно показывают только один пик в частотном ответе, транспортное средство, используемое для этого исследования, показало четыре различных и отдельных пика и четыре нечетных гармоники в целом. Изучение этого важного аспекта позволяет найти правильный отпечаток для каждого профиля местности.
Функция спектральной плотности мощности также использовалась для изучения поведения тока двигателя в установившемся режиме, когда транспортное средство движется прямо в течение не менее 30 с и с максимальной скоростью по разным местностям. Это дает общее представление о спектральном распределении энергии и текущей сигнатуре для каждого профиля местности.
4. Результаты экспериментов
4.1. Полевые эксперименты
Для проверки метода и сбора данных было проведено несколько тестов на различных поверхностях местности: песке, гравии, грязи и асфальте.На рисунке 9 показан аэрофотоснимок испытательного поля, полученного с помощью Google Earth (40 ° 7 ‘56,0856 ″ с.ш., 18 ° 30’ 2,2356 ″ в.д.), используемого для экспериментальных кампаний (слева), которое находится в Отранто, Италия, и вид автомобиля, движущегося по небольшим естественным неровностям (справа). Во всех экспериментах машина «maXXII» была вынуждена выполнять два основных движения примитивов и, в частности, прямолинейное движение с постоянной скоростью 0,75 м / с, за которым следовал маневр рулевого управления с постоянной скоростью поворота 45 град / с. . Во время каждого теста с помощью утилиты rosbag, предоставляемой ROS, регистрировался набор данных, включая токи двигателя, угловые скорости для звездочек гусеницы и ускорения вдоль вертикальной оси с частотой F с = 120 Гц.Для каждой местности был определен «отпечаток пальца» путем объединения конкретных значений электрических токов, эквивалентного трека и спектральной плотности мощности как электрических токов, так и вертикальных ускорений; после этого для обучения модели классифицированным данным использовался инструмент обучения классификации.
Рис. 9. (A) Аэрофотоснимок испытательного поля в бокситовом карьере, (B) транспортное средство, движущееся по естественным неровностям.
4.2. Оценка местности
Зарегистрированные значения для эквивалентного пути показаны на Рисунке 10, где можно проверить поведение транспортного средства при поворотах по песку, гравию, грязи и асфальту.Все основные значения представлены в Таблице 1, а максимальная эквивалентная колея 1,329 м была зафиксирована во время испытания по грязи, где влажная поверхность создает самый высокий эффект скольжения, а асфальт показал самое низкое среднее значение — всего 1,159 м.
Рисунок 10 . Эквивалентные значения дорожек для песка, гравия, грязи и асфальта.
Таблица 1 . Эквивалентные значения треков для разных ландшафтов.
Кроме того, токи двигателя демонстрируют различное поведение на каждой местности, показывая широкие и узкие пики тока на асфальте и гравии и почти плоскую тенденцию на грязи и песке.В этих двух последних случаях амплитуда тока была выше, чем на асфальте и гравии, поскольку песок и грязь являются более гибкими и предлагают большую площадь контакта для гусениц, что вызывает запрос на более высокое тяговое усилие, как показано на рисунке 11, где синий линия относится к току левого двигателя, а красная линия относится к току правого двигателя; смещение между обоими токами происходит из-за различных внутренних характеристик двигателя и рассеиваемой мощности. Средние значения тока приведены в таблице 2 и относятся к прямым путям.
Рисунок 11 . Значения тока двигателя для песка, гравия, грязи и асфальта.
Таблица 2 . Эквивалентные значения треков для разных ландшафтов.
Спектральная плотность мощности была вычислена по выборке с длительностью t = 10 с с использованием ускорений вдоль оси Z транспортного средства, записанных с инерциального датчика, и показывает, как треки взаимодействуют с профилем местности, как есть. можно увидеть на рисунке 12.
Рисунок 12 .Значения спектральной плотности мощности для песка, гравия, грязи и асфальта.
В частности, стоит отметить, что более высокое значение спектральной плотности мощности было зарегистрировано на уровне около 10 Гц для всех тестов, показывая своего рода внутреннюю периодичность транспортного средства, как показано в таблице 3. Конкретная конструкция дорожки генерирует в общей сложности четыре гармоники. для каждого ландшафта: первый центрируется на частоте 10 Гц для всех ландшафтов, кроме грязи. Третья гармоника находится примерно на 30 Гц, пятая — на 50 Гц и седьмая гармоника — на 70 Гц.Густая грязь снижает подвижность всей трассы, и это вызывает очень медленную частотную характеристику, в то время как асфальт обеспечивает гораздо более отзывчивый и реактивный профиль местности.
Таблица 3 . Типичные значения PSD вертикального ускорения тела.
Предыдущий метод, основанный на функции спектральной плотности мощности, был применен также к токам двигателя при прямолинейном движении, чтобы добавить и улучшить информацию о сигнатуре профиля для каждой местности.
Для этой конкретной ситуации спектральная плотность мощности была вычислена с использованием метода Велча, который основывается на концепции использования оценок спектра периодограммы в результате преобразования сигнала из временной области в частотную для уменьшения шума в оцениваемой области. спектры мощности в обмен на уменьшение разрешения по частоте. Метод применяется как к левому, так и к правому мотору; среднее значение их СПМ-амплитуд рассматривается как дополнительный параметр для характеристики местности.В таблице 4 приведены некоторые типичные значения амплитуд PSD, применяемых к токам двигателя на различных участках.
Таблица 4 . Спектральная плотность мощности.
4.3. Алгоритм классификации
После 100 реальных кампаний испытаний были зарегистрированы средние значения тока двигателей и спектральной плотности мощности как для ускорений по оси Z, так и для тока двигателей для каждого профиля местности путем выполнения тестов для т. = 40 с в течение прямая линия на определенной местности, в то время как эквивалентный путь был получен во время маневра рулевого управления на той же местности, с t = 10 с, чтобы создать реляционную базу данных, в которой каждая местность формально описывается диапазоном средних значений.На рисунке 13 показаны образцы средних значений, относящиеся к некоторым основным профилям местности. Данные были сохранены в текстовом файле, где каждый массив отсчетов состоял из четырех числовых значений (эквивалентная дорожка, ток двигателей, PSD по ускорениям, PSD по токам). Впоследствии вероятностная графическая модель, основанная на байесовской сети, представляющая группу переменных и их условных зависимостей с использованием направленного ациклического графа (DAG), была разработана для узла ROS для сравнения полученных в режиме онлайн данных датчиков с набором данных, хранящимся в базе данных.Этот узел ROS использовался для вывода оценок профиля местности в режиме онлайн путем запуска вероятностного алгоритма данных в реальном времени, поступающих от датчиков транспортного средства.
Рисунок 13 . Справочные значения для некоторых профилей местности.
5. Заключение
В этой статье был представлен метод определения характеристик местности, в котором использовался гусеничный автомобиль с бортовым поворотом и независимой пассивной подвеской. Он основан на оценке трех параметров, которые зависят от местности: токов двигателя, эквивалентного пути и спектральной плотности мощности.Эти параметры можно измерить во время нормального вождения, отслеживая движение автомобиля, токи двигателя и ускорения по вертикальной оси. Наблюдатель Калмана на основе модели был введен для оценки скольжения, в то время как функция спектральной плотности мощности использовалась для изучения вибрационной реакции транспортного средства для различных профилей местности. Эксперименты показывают, что классификатор может эффективно различать четыре типа профилей местности, включая асфальт, гравий, грязь и песок с высокой точностью более 89% для гравия и песка, как показано на рисунке 14.Обнаружение грязи представляет собой показатель успеха около 72% и требует дальнейших исследований из-за его непредсказуемости, в основном на гусеничных транспортных средствах. Дальнейшее продолжение этого исследования также рассмотрит смещение и положение подвески путем считывания данных с линейных потенциометров, установленных параллельно на каждом амортизаторе, чтобы исследовать частотную характеристику для каждой подвески.
Рисунок 14 . Точность предлагаемого метода классификации.
Доступность данных
Наборы данных, созданные для этого исследования, доступны по запросу соответствующему автору.
Авторские взносы
Оба автора внесли значительный вклад в концепцию и дизайн исследования. Они в равной степени занимались анализом и интерпретацией данных, а также написанием рукописи.
Финансирование
Исследование, приведшее к этим результатам, получило финансирование от Европейской комиссии Horizon 2020 в соответствии с соглашением о гранте n. 821988 ADE.
Заявление о конфликте интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могут быть истолкованы как потенциальный конфликт интересов.
Список литературы
Беллоне, М., Рейна, Г., Кальтаджироне, Л., и Вад, М. (2018). Изучение проходимости из облаков точек в сложных сценариях. IEEE Trans. Intell. Транспорт. Syst. 19, 296–305. DOI: 10.1109 / TITS.2017.2769218
CrossRef Полный текст | Google Scholar
Брукс, К. и Ягнемма, К. (2005). Классификация местности на основе вибрации для планетоходов. IEEE Trans. Робот. 21, 1185–1191. DOI: 10.1109 / TRO.2005.855994
CrossRef Полный текст | Google Scholar
Бротен, Г. Д., Маккей, Д., и Коллиер, Дж. (2012). «Вероятностное обнаружение препятствий с использованием карт местности размером 2 1/2 D», в материалах Труды 9-й конференции 2012 г. по компьютерному зрению и зрению роботов (CRV) (Торонто, Онтарио), 17–23.
Google Scholar
DuPont, E., Moore, C., Collins, E., and Coyle, E. (2008). Метод частотной характеристики для классификации местности в автономных наземных транспортных средствах. Автономные роботы 24, 337–347.DOI: 10.1007 / s10514-007-9077-0
CrossRef Полный текст | Google Scholar
Эльфес, А., Бергерман, М., Карвалью, Дж. Р. Х., Пайва, Э., Рамос, Дж., И Буэно, С. (1999). «Робототехнические комплексы« воздух-земля »для совместных приложений: концепции и предварительные результаты», в 2nd International Conference on Field and Service Robotics (Pittsburgh, PA), 75–80.
Google Scholar
Хенсон Г., Мейнард М., Димитоглоу Г. и Лю X. (2008). «Алгоритмы и анализ производительности для навигации по пути автономных роботов, управляемых Акерманом», в Труды 8-го семинара по показателям производительности для интеллектуальных систем (Гейтерсбург, Мэриленд), 230–235.DOI: 10.1145 / 1774674.1774710
CrossRef Полный текст | Google Scholar
Цзинь, П., Ли, П., Ван, К., и Пу, З. (2015). Разработка и применение новых параметров спектральных характеристик для классификации типов почвенных солей на засушливых землях. Ecol. Индикат. 54, 116–123. DOI: 10.1016 / j.ecolind.2015.02.028
CrossRef Полный текст | Google Scholar
Ли, Л. и Санду, К. (2013). Стохастическое моделирование одномерных и двухмерных профилей местности с использованием подхода полиномиального хаоса. Внутр. J. Vehicle Des. 63, 305–326. DOI: 10.4271 / 2005-01-3559
CrossRef Полный текст | Google Scholar
Мартинес, Дж., Мандоу, А., Дж. Моралес, С. П., и Гарка-Сересо, А. (2005). Приближенная кинематика гусеничных мобильных роботов. Внутр. J. Робот. Res. , 24, 867–878. DOI: 10.1177 / 0278364
8239CrossRef Полный текст | Google Scholar
Маша Д., Берк М. и Твала Б. (2017). «Методы оценки скольжения для проприоцептивной классификации местности с использованием гусеничных мобильных роботов», в Ассоциация распознавания образов Южной Африки и робототехники и мехатроники (PRASARobMech) (Блумфонтейн), 1–7.
Google Scholar
Милелла А., Рейна Г. и Андервуд Дж. (2015). Самообучающаяся структура для статистической классификации местности с использованием радара и монокулярного зрения. J. Полевой робот. 32, 20–41. DOI: 10.1002 / rob.21512
CrossRef Полный текст | Google Scholar
Нарваез Ф., Рейна Г. и др. (2017). Обзор методов ранжирования и визуализации для фенотипирования точного земледелия. IEEE ASME Trans. Мехатрон. 22, 2428–2439.DOI: 10.1109 / TMECH.2017.2760866
CrossRef Полный текст | Google Scholar
Охеда, Л., Боренштейн, Дж., Витус, Г., и Карлсен, Р. (2006). Характеристика и классификация местности с помощью мобильного робота. J. Полевой робот. 23, 103–122. DOI: 10.1002 / rob.20113
CrossRef Полный текст | Google Scholar
Пентцер, Дж., Бреннан, С., Райхард, К. (2014). Прогнозирование кинематики роботов с бортовым поворотом на основе моделей с использованием онлайн-оценки мгновенных центров вращения гусениц. J. Полевой робот. 31, 455–476. DOI: 10.1002 / rob.21509
CrossRef Полный текст | Google Scholar
Рейна, Г., Пайано, М., и Бланко-Кларако, Дж. (2017b). Оценка параметров транспортного средства с использованием оценщика на основе модели. мех. Syst. Сигнальный процесс , 87, 227–241. DOI: 10.1016 / j.ymssp.2016.06.038
CrossRef Полный текст | Google Scholar
Рейна Г. и Галац Р. (2016). Оценка местности на основе скольжения с бортовым поворотом. Vehicle Syst.Dynam. 54, 1384–1404. DOI: 10.1080 / 00423114.2016.1203961
CrossRef Полный текст | Google Scholar
Рейна Г., Милелла А. и Галати Р. (2017a). Оценка местности для точного земледелия с использованием динамического моделирования транспортных средств. Биос. Англ. 162, 124–139. DOI: 10.1016 / j.biosystemseng.2017.06.025
CrossRef Полный текст | Google Scholar
Ротрок, Б., Папон, Дж., Кеннеди, Р., Оно, М., и Хеверли, М. (2016). «SPOC: классификация местности на основе глубокого обучения для миссий марсохода», в AIAA Space Forum (Лонг-Бич, Калифорния), 1–12.
Google Scholar
Шефер, Х., Лукш, Т., и Бернс, К. (2005). «Обнаружение и предотвращение препятствий для мобильной наружной робототехники», конференция EOS по промышленной визуализации и машинному зрению, 13–15 июня, (Мюнхен).
Google Scholar
Скоростные внедорожники: подвески, гусеницы, колеса и динамика
СерияПредисловие xiii
Благодарности xv
Введение xvii
1 Ходовая часть и системы подвески гусеничных транспортных средств 1
1.1 Общее устройство 1
1.2 Поперечные торсионные стержни 2
1.3 Винтовые пружины 6
1.4 Гидрогазовые подвески 8
1.4.1 Гидрогазовая установка Challenger MBT 8
1.4.2 Измеренные характеристики установки Challenger 9
1.4.2.1 Характеристики пружины 9
1.4.2.2 Характеристики демпфера 11
1.4.2.3 Перепад давления на демпферном клапане 11
1.4.2.4 Контур силы / смещения 11
1.4.2.5 Проточная установка 12
1.4.2.6 Демпфирование подвески многоцелевого транспортного средства 13
1.4.3 Влияние температуры 13
1.4.3.1 Двухступенчатые блоки 15
1.4.3.2 Пружинные блоки счетчика] 17
1.4.4 Другие типы гидрогазовой подвески 18
1.4.4.1 Блоки с двумя] цилиндрами 18
1.4.4.2 Блоки с рычагами дюймовые] 18
1,5 Демпферы 20
1.5.1 Гидравлические демпферы 20
1,5 .2 Демпферы трения 20
Справочная информация 22
2 Гусеничные системы транспортных средств 23
2.Дорожки с 1 звеном 23
2.1.1 Дорожки для одиночных] штифтов 26
2.1.1.1 Дорожки для сухих] штифтов 26
2.1.1.2 Гусеницы с резиновыми] втулками 27
2.1.2 Дорожки с двойными] штифтами 28
2.1.3 Резиновые накладки гусениц, дорожные колеса и натяжители гусениц 31
2.1.3.1 Резиновые накладки гусениц 31
2.1.3.2 Дорожные колеса 32
2.1.3.3 Натяжители гусениц 33
2.1.4 Нагрузки на гусеницы 33
2.1. 4.1 Центробежное натяжение 34
2.1.4.2 Измерение крутящего момента главной] передачи 34
2.1.4.3 Боковая рупорная нагрузка 35
2.1.5 Сопротивление качению: аналитические методы 35
2.1.5.1 На металлической дорожке колеса 35
2.1.5.2 На резиновой дорожке колеса 36
2.1.6 Сопротивление качению: экспериментальные измерения 37
2.1.6.1 Chieftain 38
2.1.6.2 FV 432 39
2.1.6.3 Scorpion and Spartan 40
2.1.6.4 Резюме 42
2.1.7 Шум и вибрация 42
2.1.8 Подходы к снижению шума и вибрация 43
2.1.8.1 Анализ методом конечных элементов и экспериментальные звездочки 43
2.1.8.2 Полностью развязанная ходовая часть 44
2.1.8.3 Гибкие резиновые гусеницы 44
2.1.9 Снижение шума и вибрации 44
2.1.9.1 Этап (a): установка Основные источники шума 45
2.1.9.2 Этап (b): проектирование и производство упругих опор 46
2.1.9.3 Этап (c): результаты испытаний упругих опор 47
2.2 Гибкие гусеницы 48
2.2.1 Ранние гибкие дорожки 49
2.2.2 Современные гибкие дорожки 50
2.2.3 «Доказательство] принципа» Гибкие дорожки для Spartan APC 51
2.2.3.1 Отметка 1 дорожек 53
2.2.3.2 Отметка 2 гусеницы 54
2.2.3.3 Отметка 3 гусениц 55
2.2.3.4 Испытания на долговечность 57
2.2.4 Дальнейшие разработки 57
Ссылки 58
3 Характеристики подвески гусеничного транспортного средства: моделирование и тестирование 59
3.1 Реакция человека на вибрацию всего тела (WBV) и шок 59
3.1.1 BS 6841: 1987 и ISO 2631] 1 (1997) 59
3.1.2 Дополнительные стандарты, касающиеся WBV 61
3.1.2.1 Потребляемая мощность 61
3.1.2.2 Европейская директива о физических агентах (вибрация) 2002/44 / EC 64
3.1.2.3 ISO 2631] 5 (2004) 64
3.2 Профили местности 64
3.2.1 Характеристики 64
3.2.2 Курсы испытаний подвески DERA 65
3.2.3 Реакция мульти] колесных транспортных средств 66
3.2.4 Четверть] Модель автомобиля 68
3.2.5 Компьютерное моделирование 71
3.2.5.1 Спецификация параметров 73
3.2.5.2 Допущения 74
3.5.2.3 Примеры Использование модели 74
3.5.2.4 Сравнение с данными испытаний 75
3.5.2.5 Повышение характеристик подвески автомобилей семейства Scorpion 76
3.2.6 Испытания ходовых характеристик испытательной машины подвески Challenger 76
3.2.7 Отклик по тангажу на торможение и ускорение 79
3.2.7.1 Компенсация холостого хода 83
3.2.8 Испытательный автомобиль с подвеской на холостом ходу (SITV) 85
Ссылки 88
4 Управляемые подвески 89
4.1 Регулировка высоты и положения 89
4.1.1 Гусеничные автомобили 89
4.1.2 Колесные автомобили 91
4.2 Активно контролируемое демпфирование (полу] активная подвеска) 91
4.2.1 Адаптивное демпфирование 91
4.3 Активные системы подвески 91
4.4 Машины для испытаний активной подвески DERA 93
4.4.1 Узкополосные системы 93
4.4.1.1 Колесное транспортное средство 95
4.4.1.2 Гусеничное транспортное средство 97
4.4.1.3 Лабораторная испытательная установка 97
4.4.2 Широкополосная система 97
4.5 Выводы 100
Ссылки 101
5 Трансмиссии и подвески колесных транспортных средств 103
5.1 Небронированные автомобили 103
5.1.1 Leyland DAF DROPS 8 × 6 Грузовой перевозчик 103
5.1.2 MAN SX 8 × 8 High] Мобильный грузовой транспорт 105
5.1.3 Pinzgauer Легкие грузовики 4 × 4 и 6 × 6 105
5.1.4 Диапазон Rover 106
5.1.5 Alvis Stalwart 107
5.1.6 Самосвал / карьерный самосвал Caterpillar 108
5.1.7 Карьерный самосвал Euclid (позже Hitachi) 110
5.2 Бронированные автомобили 112
5.2.1 H] Привод 112
5.2.2 I] Привод 113
5.3 взаимосвязанные подвески 116
5.3.1 Методы взаимосвязи 116
Ссылки 122
Характеристики подвески 6 колесных транспортных средств 123
6,1 квартал] Модель автомобиля 123
6.2 Фильтр колесной базы 126
6.3 Измерения DROPS на грузовиках 127
Ссылка 132
7 Характеристики рулевого управления гусеничных и колесных транспортных средств 133
7.1 Гусеничные машины 133
7.1.1 Механизмы управления с бортовым поворотом 133
7.1.2 Модели с бортовым поворотом 136
7.1.3 Волшебная формула 139
7.1.4 Получение параметров волшебной формулы для трека 140
7.1.5 Модель характеристик рулевого управления 144
7.1.6 Результаты модели 146
7.1 .6.1 Устройства управления водителем 146
7.1.6.2 Поворотный поворот 146
7.1.6.3 Влияние радиуса поворота на поворотный момент 147
7.1.6.4 Вождение на повороте с радиусом 15 м с различной скоростью для демонстрации влияния натяжения гусеницы и подвесная система 148
7.1.6.5 Движение по повороту с радиусом 15 м с разной скоростью с новыми и изношенными колодками и по поверхности с низким] трением 150
7.1.6.6 Движение со скоростью 15 мс – 1 на поворотах с разным радиусом 152
7.1.6.7 Эффект положения центра тяжести (CG) 154
7.1.6.8 Проверка модели 156
7.2 Сравнение колесных транспортных средств с салазками и управляемыми колесами Ackermann 156
7.2.1 Данные о силе скольжения в шинах 157
7.2.2 Выбор модели шины 158
7.2.2.1 Транспортное средство с салазками: модель 159
7.2.3 Результаты для модели 159
7.2.3.1 Нейтральный разворот 159
7.2.3.2 Изменение момента поворота в зависимости от радиуса поворота 161
7.2.3.3 Повороты на поворотах с радиусом 15 м и 30 м с разной скоростью 162
7.2. 4 Модель управляемого транспортного средства Ackermann 163
7.2.5 Результаты модели 163
7.2.5.1 Характеристики рулевого управления 163
7.2.5.2 Требования к питанию 165
7.2.5.3 Износ шин 165
7.2.6 Векторизация крутящего момента 166
7.2.6.1 Управление двигателем отдельных колес 169
7.2.6.2 Транспортные средства с шарнирно-сочлененной рамой 169
Приложение A: Уравнения движения 170
Приложение B: Уравнения движения 173
Ссылки 175
8 Характеристики мягких] грунтов колес и Гусеничные машины 177
8.1 Основные требования 177
8.1.1 Грунты 177
8.1.2 Основные определения 178
8.1.3 Модели грунтовых машин 179
8.2 Модели для мягких связных грунтов 180
8.2.1 Индекс подвижности транспортного средства (VCI), модель 180
8.2.1.1 Индекс подвижности для гусеничных транспортных средств 181
8.2.1.2 Индекс подвижности для колесных транспортных средств 181
8.2.2 Номер подвижности WES Модель 182
8.2.3 Среднее максимальное давление ( MMP) 182
8.2.4 Индекс ограничивающего конуса транспортного средства (VLCI) 183
8.2.4.1 Шины 184
8.2.4.2 Гусеницы 187
8.3 Модели для сухих фрикционных грунтов 189
8.3.1 Номер подвижности WES для колесных транспортных средств 189
8.3.2 Испытания DERA 190
8.3.3 Гусеничные машины 193
8.4 Пространственная эффективность систем ходовой части для бронированных машин 194
8.5 Взаимосвязь тягового усилия и скольжения для шин в мягких связных грунтах 197
8.5.1 Описание характеристик силы и скольжения 197
8.5.1.1 Прямоугольные гиперболы 197
8.5.1.2 Экспоненты 197
8.5.2 Магическая формула 198
8.5.3 Разработка модифицированной магической формулы 199
Ссылки 202
9 Эффект свободного, заблокированного and Limited] Дифференциалы проскальзывания тяги и рулевого управления 203
9.1 Типы блокируемых и ограниченных] дифференциалов скольжения 203
9.1.1 Блокируемые дифференциалы 203
9.1.2 Использование тормозной системы 204
9.1.3 Скорость] зависимая ограниченная] дифференциалы скольжения 204
9.1.4 Фрикционные Limited] Дифференциалы скольжения 205
9.2 Взаимосвязи для Frictional Limited] Дифференциалы скольжения 206
9.3 Тяговые характеристики 209
9.3.1 Тяговые характеристики 209
9.3.2 Результаты моделей 210
9.3.2.1 Влияние переноса веса на ось 210
9.3.2.2 Различная прочность грунта под шинами 212
9.3.2.3 На разделенной μ-поверхности 214
9.4 Характеристики рулевого управления на дорожном покрытии 214
9.4.1 Рулевое управление Модель производительности 214
9.4.2 Результаты модели 214
Ссылка 216
10 Сочлененные транспортные средства 217
10.1 Гусеничные автомобили с сочлененной рамой 217
10.1.1 Тяговое усилие с заносом и шарнирно-сочлененным рулевым управлением 221
10.2 сочлененных колесных транспортных средства 222
10.2.1 Поведение рулевого управления с системой Ackermann, с заносом и шарнирно-сочлененным рулевым управлением 225
10.2.1.1 Твердые поверхности 225
10.2.1.2 Мягкие грунты 225
Ссылки 226
11 Поведение при опрокидывании автомобиля 225 9000
11.1 Основные соображения 227
11.2 Методы снижения вероятности опрокидывания 229
11.2.1 Системы предупреждений 229
11.2.2 Электронные программы стабилизации 230
11.2.3 Активные стабилизаторы поперечной устойчивости 230
11.3 Опрокидывание самосвала: пример 230
11.3.1 Расчет угла опрокидывания 231
Ссылки 233
Обозначения 235
Сокращения 243
Библиография 245
900 245 Оптимизация системы подвески и анализ чувствительности для повышения устойчивости тяжелого автомобиля среднего размера https://doi.org/10.1016/j.jestch.2017.03.007Получить права и содержание
Аннотация
В данной статье представлен метод систематических исследований статические и динамические характеристики качения и улучшение динамики устойчивости за счет увеличения поперечной жесткости подвески.Одним из основных отличий этого исследования от предыдущей работы является то, что оно включает параметрический анализ чувствительности с целью увеличения запаса прочности от порогового значения угла крена с использованием статических и динамических испытаний, а также сравнение результатов внутри самих себя. Поскольку испытание стола физического наклона не может быть продолжено до фактического опрокидывания транспортного средства, это испытание было выполнено в моделировании с проверенной моделью транспортного средства с использованием Adams / Car. Во время испытаний использовались три различных передних стабилизатора поперечной устойчивости и две разные передние листовые рессоры, чтобы выполнить параметрический анализ чувствительности и изучить влияние компонентов на характеристики устойчивости.
Таким образом, в объем данной работы, в отличие от предыдущих исследований, включены эксперименты, включающие физические испытания (например, наклонный стол, рыболовный крючок и прохождение поворотов) и численные расчеты. Кроме того, выполняется проверка виртуальной модели, параметрический анализ чувствительности и сравнение виртуального теста и физического теста. Благодаря тщательной проверке, анализу чувствительности и валидации результаты могут быть более надежными по сравнению с предыдущими исследованиями.
Сокращения
RCHвысота центра крена подвески
Køжесткость подвески
hвысота центра тяжести
Jфункция стоимости алгоритма оптимизации
Ключевые слова
Динамика автомобиля
Оптимизация подвески
Анализ чувствительности
Анализ чувствительности Автобус Midi
Рекомендуемые статьиЦитирующие статьи (0)
© 2017 Karabuk University. Издательские услуги Elsevier BV
Рекомендуемые статьи
Цитирующие статьи
Активная подвеска в железнодорожных транспортных средствах: обзор литературы
Колесные пары с цельной осью и независимо вращающиеся колеса
Для обычных транспортных средств с пассивной системой подвески компромисс между устойчивостью и поворотом -согласованное поведение должно быть выполнено, даже если реализованы пассивные механизмы управления [90].Напротив, управление кинематикой колесной пары с помощью активной подвески может обеспечить гибкие решения для обеспечения устойчивости и хорошего поведения при повороте одновременно. Ожидается, что реализация активной первичной подвески принесет большую денежную выгоду, чем активная вторичная подвеска, из-за ее связи с контактом колеса с рельсом. Износ между колесом и рельсом будет значительно снижен, а усталостная усталость при качении, как правило, будет снижена, что будет способствовать снижению затрат как на транспортные средства, так и на инфраструктуру [91].
Колесные пары в целом можно разделить на два типа в зависимости от их механической конструкции: колесные пары с цельной осью и независимо вращающиеся колеса. Для колесных пар с неразъемной осью два колеса, жестко закрепленные на одной оси, будут иметь одинаковую скорость вращения. Следовательно, продольный путь утечки обеспечивает возможность наведения и самоцентрирования. Однако продольная утечка вызывает нестабильность и нежелательный износ колеса и рельса во время прохождения кривой. Напротив, независимо вращающиеся колеса могут иметь разные скорости вращения, что приводит к фактическому отсутствию продольного пути утечки, что в конечном итоге приводит к потере направляющей и самоцентрирующейся способности и увеличению риска контакта с фланцем.
В целом, при проектировании активной первичной подвески для жестких колесных пар необходимо учитывать «устойчивость» и «рулевое управление», в то время как для независимо вращающихся колес также требуется «наведение».
Из-за естественного различия между колесными парами со сплошной осью и независимо вращающимися колесами интуитивно понятно разделить активную первичную часть подвески на две части. В разд. 5.2 представлены активные решения для одноосных колесных пар, а решения для независимо вращающихся колес описаны в разд.5.3. Всего рассмотрено шесть конфигураций, которые приведены в таблице 1.
Таблица 1 Шесть концепций активной первичной подвескиАктивная первичная подвеска для колесных пар с неразъемной осью
Принципы и конфигурации
- а)
Приводная жестко-осевая колесная пара (ASW)
Для колесных пар со сплошной осью ASW является наиболее изученной конфигурацией, в которой либо крутящий момент рыскания, либо поперечная сила прикладываются непосредственно к колесной паре для управления рысканием и поперечными движениями, так что прохождение кривой и стабильность будут улучшены [3].Этот принцип может быть реализован с помощью трех основных механических устройств. Крутящий момент по рысканью может быть приложен непосредственно одним приводом рыскания, установленным между тележкой и колесной парой, как показано на фиг. 22а, или, что более практично, с использованием двух исполнительных механизмов в продольном направлении на концах колесной пары, как показано на фиг. 22b. Поскольку рыскание колесной пары и боковое движение взаимосвязаны, реализация боковых приводов (см. Рис. 22c) является еще одним способом достижения управления движением колесной пары. Однако исследование [92], основанное на упрощенной модели двухосного транспортного средства, пришло к выводу, что для бокового срабатывания требуется большее усилие для достижения такой же устойчивости транспортного средства, чем для привода рыскания.Более того, при использовании этой схемы можно ожидать ухудшения качества езды, и возникнет проблема с местом для установки боковых приводов.
Рис. 22Общие механические устройства для приводной твердоосной колесной пары (ASW)
Среди трех схем расположение (b) является наиболее подходящей идеей, на основе которой были предложены некоторые новые конкретные схемы, показанные на рис.
Рис. 23Примеры схем рулевого управления: тележка с активным рулевым управлением с двумя приводами [93] (слева) и тележка с активным рулевым управлением с одним приводом [94] (справа)
В левой схеме, показанной на рис.23, представленный Park et al. [93] каждая колесная пара имеет один продольный привод. Механические рычаги предназначены для передачи взаимно противоположного усилия срабатывания на левый и правый концы каждой колесной пары. Следовательно, для каждой колесной пары реализован только один привод. На правой схеме, представленной Umehara et al. [94], более тщательно спроектированный набор шатунов связывает движение передней и задней колесной пары, так что для каждой тележки требуется только один привод для достижения эффекта рулевого управления.Уменьшение количества приводов за счет использования шарнирно-сочлененных механических рычагов может сэкономить место для установки и снизить затраты на систему привода. Однако реализация меньшего количества приводов означает более высокие требования к характеристикам для каждого привода, такие как более высокая максимальная сила и максимальное давление, но все же есть потенциал для повышения надежности всей системы. При уменьшении количества приводов можно сэкономить место для установки и затраты на отказоустойчивые приводы с дублирующими конструкциями.Это важный аспект в процессе практического проектирования [95].
В концепции «ослабления рыскания» [96], как показано на рис. 24, пружина расположена последовательно с продольным приводом, соединяющим ось с рамой тележки. На касательной трассе устойчивость обеспечивается пассивной пружиной и высокой жесткостью исполнительной системы, работающей в низкополосном частотном диапазоне или в пассивном режиме. На поворотах привод работает в активном режиме и может управлять колесной парой с небольшим усилием.
Фиг.24Схема ослабления рыскания [96]
Если первичная пружина остается параллельной с приводами рыскания в продольном направлении для обеспечения устойчивости транспортного средства, требуется более высокая сила срабатывания, чтобы нейтрализовать действие пассивной пружины на поворотах. . Однако наличие пассивной подвески параллельно исполнительному механизму является эффективным подходом, гарантирующим отказоустойчивость активной подвески, что имеет решающее значение для реализации ASW [95]. В реальной конструкции первичной подвески продольную жесткость пассивной пружины трудно полностью устранить из-за наличия либо винтовой, либо резиновой пружины, необходимой для выдерживания вертикальной нагрузки.Тем не менее, уменьшение обычной продольной жесткости является инструментом для достижения более низкой силы срабатывания, как показано в [97, 98].
- (b)
Вторичный контроль рыскания (SYC)
Вторичный контроль рыскания впервые был предложен Diana et al. с целью улучшения устойчивости на касательных путях и поворотов поворотного поезда [99, 100]. Крутящий момент рыскания от кузова автомобиля к тележке создается двумя продольными электромеханическими приводами в положении, в котором установлен исходный пассивный демпфер рыскания.Эта схема также называется активным демпфером рыскания (ADD, на немецком языке: «aktiver Drehdämpfer»). Схема этой концепции показана на рис. 25. Концепция SYC может повысить критическую скорость транспортного средства и уменьшить силы смещения гусеницы. Поскольку движение колесной пары неконтролируемое, эффект рулевого управления не так эффективен, как ASW, но улучшенная стабильность может позволить снизить первичную жесткость по рысканью и, следовательно, привести к улучшению характеристик поворота. Хотя также разумно отнести SYC к активной вторичной подвеске, целью SYC является повышение устойчивости и снижение сил смещения гусеницы на поворотах, а не улучшение качества езды.Поэтому данная схема управления ближе к природе активной первичной подвески.
Рис. 25Вторичное управление рысканием (SYC)
Разделяя аналогичную идею SYC, предлагается новое активное управление тележкой для повышения устойчивости, как это представлено в [101]. В этой работе два инерционных привода применяются в поперечном направлении на передней и задней балках рамы тележки. Результаты моделирования подтвердили повышение устойчивости, а недавно испытание на роликовой установке с масштабированием продемонстрировало уменьшение бокового смещения тележки [102].
- (c)
Тележка с управляемой силой рыскания (AY-FS)
На основе SYC Simson предложила новую активную подвеску AY-FS для тяжелых тяговых локомотивов [103,104,105]. В этой концепции рычажный механизм рулевого управления с усилием реализован с помощью SYC. Его можно рассматривать как комбинацию SYC и пассивных рулевых тяг, с помощью которых колесные пары могут быть переведены в идеальное положение в соответствии с кинематическим соотношением между тележкой и кузовом автомобиля, как показано на рис. 26. Эта концепция может значительно улучшить поведение на изгибе. тепловозов с высоким тяговым усилием.
Рис. 26Тележка с управляемой силой рыскания (AY-FS) [104]
Стратегии управления для рулевого управления и устойчивости
Стратегия управления варьируется в зависимости от целей управления, из которых различные стратегии подразделяются на две основные категории : (а) стратегии управления для рулевого управления и (б) стратегии управления для устойчивости при охоте.
- а.
Стратегии управления для рулевого управления
Основной целью внедрения активной основной подвески часто является улучшение поведения на поворотах.Число износа / индекс износа и равенство силы смещения гусеницы для разных колесных пар часто используются для оценки поведения автомобиля на повороте. Различные принципы рулевого управления, представленные в литературе, кратко описаны ниже: (a.1) Радиальное управление, (a.2) Совершенное управление, (a.3) Управление рулевым управлением в локомотивах и (a.4) Другие органы управления
- a. 1
Радиальное управление
Идея радиального управления состоит в том, чтобы управлять каждой колесной парой для достижения радиального положения на поворотах. Другими словами, угол атаки колесной пары должен быть как можно меньше.На основе этой идеи были предложены схемы управления тележками с помощью пассивной навески или сцепки колесных пар. Хорошо зарекомендовала себя, например, конструкция Тальго [106]. Однако теоретически эта концепция управления обеспечивает идеальное поведение при изгибе только тогда, когда дефицит бруса равен нулю, что редко бывает в реальной эксплуатации. Подходящий небольшой угол атаки необходим для создания боковой силы ползучести, которая может уравновесить нескомпенсированную боковую силу в нормальных случаях. Несмотря на свою простоту, было показано, что эта схема управления обеспечивает значительное улучшение поведения при изгибе [107].
- a.2
Идеальное рулевое управление
Идеальное рулевое управление, определенное Гудоллом и Мей [59], указывает на то, что продольные силы скольжения на колесах одной оси должны быть равны нулю, если отсутствует сила тяги или торможения. применяемый. При этом должна быть достигнута одинаковая поперечная сила скольжения на каждой колесной паре. Однако в процессе эксплуатации прямые измерения сил ползучести очень затруднены. Поэтому некоторые эквивалентные индикаторы, которые могут быть сформулированы для идеальных условий рулевого управления, предлагаются и резюмируются, как показано ниже.
Нулевое продольное усилие (без силы тяги и торможения) и равные поперечные силы означают чистое качение каждого колеса. Для достижения чистого качения можно применить крутящий момент рыскания для управления поперечным положением колесной пары [108, 109].
В предположении, что колесо представляет собой прямой конус [93], необходимое боковое смещение колесной пары может быть рассчитано по формуле. ( 7 ):
$$ y = \ frac {{er_ {0}}} {\ lambda R}, $$
(7)
где \ (e \) — просвет на половину пути; \ (r_ {0} \) представляет радиус качения; \ (\ lambda \) обозначает конусность колеса, а \ (R \) — радиус кривой.При таком управлении может быть трудно измерить или оценить конусность колеса и поперечные смещения колесной пары. Этот подход был использован для двухосного транспортного средства, где процедура масштабирования на основе скорости транспортного средства и расчетной кривизны применялась для повышения стабильности ПИД-регулятора в различных условиях работы [110].
Эта стратегия управления была впервые предложена в ранее упомянутом методе релаксации рыскания Шеном и Гудоллом [96], а некоторые последующие исследования были выполнены Пересом и Шеном соответственно [108, 109].
Усилие, прилагаемое к колесной паре, можно разделить на две части: силу от контакта колеса с рельсом и силу, передаваемую от тележки через первичную подвеску. Две силы ползучести, направленные в противоположном направлении на два колеса, создают крутящий момент рыскания, но в идеальных условиях рулевого управления этот крутящий момент должен быть равен нулю. Если пренебречь силой инерции колесной пары, крутящий момент, создаваемый первичной подвеской, должен быть уменьшен до нуля. Другими словами, чтобы колесная пара заняла положение чистого качения, рыскание колесной пары устанавливается на свободное.Поэтому этот контроль также известен как релаксация рыскания. Измерение этого момента рыскания может быть осуществлено путем расчета продольных сил, действующих на буксовую коробку. Сила срабатывания может быть измерена с помощью системы срабатывания, а сила пружины может быть получена путем измерения отклонения пружин и знания характеристик жесткости. Ошибка измерения может быть внесена из-за того, что жесткость изменяется при разных уровнях нагрузки.
Одинаковый идеальный угол атаки для каждой колесной пары является еще одним показателем равного бокового контактного усилия на обеих колесных парах тележки [109].Идеальный угол для каждой колесной пары определяется данными пути (кривизна и превышение высоты), недостатком наклона (скорость автомобиля) и коэффициентом проскальзывания. Управление с прогнозированием может быть реализовано, чтобы упростить конструкцию управления и избежать нестабильности системы. Однако многие неточные измерения этих параметров и неопределенность жесткости первичной подвески могут привести к неэффективности управления. Следовательно, применение управления с обратной связью повысит эффективность рулевого управления.
В этой стратегии управления не требуется ни идеального угла атаки, ни идеального бокового смещения.Вместо этого в качестве цели управления задана нулевая разница угла атаки и поперечного смещения колесных пар. Сила или прогиб первичной подвески в поперечном и продольном направлениях может быть измерена в качестве альтернативного решения для устранения разницы в движениях колесных пар.
Таким образом, все вышеупомянутые четыре стратегии основаны на одном и том же принципе в отношении сил ползучести. В идеальных условиях, когда все параметры могут быть точно измерены, все четыре стратегии управления могут обеспечить идеальный эффект рулевого управления.Если принять во внимание проблемы с зондированием и неопределенность измерения, то управляющий эффект этих стратегий управления может ухудшиться и иметь другие характеристики. В таблице 2 сравниваются приведенные выше схемы управления.
Таблица 2 Сравнение различных схем для идеального рулевого управленияВышеупомянутые четыре стратегии управления предложены из-за сложности измерения сил ползучести. С некоторыми конкретными методами фильтрации, предлагаемыми для оценки сил ползучести [111], оцененные силы ползучести могут непосредственно рассматриваться как цель управления для достижения идеального управления рулевым управлением [98].
- a.3
Рулевое управление в локомотивах
Несмотря на то, что идеальное рулевое управление в (a.2) может применяться в диапазоне железнодорожных транспортных средств за рубежом, оно может не подходить для буксировки локомотивов. Из-за значительного тягового воздействия в продольном направлении, тяжеловесные поезда на поворотах имеют продольные и поперечные силы на сцепках, которые создают момент рыскания [103]. Однако этот момент нельзя сбалансировать в концепции идеального рулевого управления, где требуются равные продольные и поперечные силы скольжения.
Учитывая это, Simson et al. предложил два принципа управления локомотивами. «Модифицированное совершенное рулевое управление локомотивом» впервые было предложено как модификация совершенного рулевого управления. Это требует равной продольной силы ползучести на каждом колесе и равной силы поперечной проскальзывания для колесных пар одной и той же тележки. Другими словами, он позволяет создавать разные поперечные силы от передней и задней тележек, так что момент рыскания может быть уравновешен. Однако равенство продольной силы ограничивает использование сцепления, поскольку вертикальная нагрузка каждого колеса изменяется во многих операциях.
Для решения этой проблемы было предложено «Идеальное рулевое управление локомотивом», в котором требование равенства продольных сил ползучести снимается, но его направление должно оставаться таким же, как сила тяги. Эта стратегия позволяет более гибко позиционировать колесную пару и может минимизировать силы проскальзывания. Более того, контакта фланцев можно эффективно избежать даже на крутых поворотах, и, как говорят, снижается риск схода с рельсов [103].
- a.4
Другие элементы управления
Для схемы SYC основной задачей управления является уменьшение / выравнивание сил смещения гусениц двух осей на одной тележке.Когда транспортное средство проходит определенный радиус кривой с определенным нескомпенсированным ускорением, эталонная сила срабатывания будет получена из справочной таблицы, полученной из большого количества имитаций с учетом различных рабочих сценариев [100].
Что касается схемы AY-FS, опорный угол рыскания тележки может быть рассчитан в соответствии с положением тележки на кривой. Для достижения заданного угла вводится ПИД-регулятор. Идею управления, основанную на измерении продольных сил, можно найти в [104, 105].
- б.
Стратегии управления устойчивостью при охоте
Самовозбуждающиеся колебания колесной пары со сплошной осью приводят к нестабильности при резком движении системы транспортного средства. Достижение стабилизации является основным интересом активной первичной подвески, помимо рулевого управления. Угол рыскания, поперечная скорость и угловая скорость рыскания колесной пары являются тремя показателями нестабильности колесной пары. Предлагаются три соответствующие стратегии управления для стабилизации кинематических режимов колесной пары.
Активное поперечное демпфирование и активное демпфирование рыскания — это две похожие стратегии управления. Первый прикладывает поперечную силу, пропорциональную скорости рыскания колесной пары, а второй — крутящий момент рыскания, пропорциональный поперечной скорости колесной пары. Эффекты стабилизации этих двух стратегий управления теоретически проверены в [3] на основе модели двухосного транспортного средства. Активное демпфирование рыскания предпочтительнее активного бокового демпфирования, поскольку оно требует меньшего усилия срабатывания и может обеспечить лучшее качество езды [92].Эффект активного демпфирования рыскания также был подтвержден тестами Pearson et al. [112].
Третья стратегия контроля устойчивости, названная «Пружина небесного крюка» (также известная как «Абсолютная жесткость по рысканию»), основана на неэффективности пассивной жесткости по рысканию [44, 113]. В пассивной первичной подвеске пружины создают рыскание, которое пропорционально относительному вращению тележки и колесной пары, но идеальное рыскание должно быть пропорционально абсолютному рысканью колесной пары. Увеличение жесткости пружины может усилить действие силы рыскания, и, таким образом, стабильность будет улучшена, но эффект все равно будет ухудшаться из-за движения тележки.Для решения этой проблемы была предложена «пружина скай-крюка» [113]. Сила рыскания, действующая на колесную пару, пропорциональна измеренному абсолютному углу рыскания колесной пары с фильтром верхних частот для удаления низкочастотного сигнала из поворота. В таблице 3 представлены три вышеуказанные стратегии контроля.
Таблица 3 Сравнение трех стратегий управления устойчивостьюВ SYC стабилизация автомобиля достигается двумя продольными приводами, имитирующими вторичные демпферы рыскания.Опорные силы приводов могут быть рассчитаны по формуле. (8):
$$ F _ {\ text {ref}} = — \ left ({c _ {\ text {v}} v _ {\ text {rel}} + m _ {\ text {v}} a _ {{ x}}} \ right), $$
(8)
где \ (v _ {\ text {rel}} \) — относительная скорость между тележкой и кузовом автомобиля, а \ (c _ {\ text {v}} \) — это усиление, подобное вязкому демпфированию. Задержки от датчиков и действия исполнительного механизма компенсируются введением члена \ (m _ {\ text {v}} a _ {{x}} \) [100].
Принципы управления устойчивостью и рулевым управлением отдельно описаны выше, в то время как управление поведением привода также может быть реализовано с помощью контроллера, такого как \ (H _ {\ infty} \).Эффективность \ (H _ {\ infty} \) была исследована для обычного транспортного средства с тележкой (Mousavi et al. [114]) и двухосного транспортного средства (Qazizadeh et al. [115]), где улучшение характеристик поворота может быть достигнуто за счет уменьшения усилия срабатывания.
Реализация
За исключением концепции SYC, нет коммерческого применения активной первичной приостановки, но значительный новый прогресс был достигнут со времени последней обзорной работы в 2007 году [4].
SYC был испытан на полномасштабной роликовой установке и гусенице [99, 100, 116] в начале 2000-х годов.Испытания подтвердили снижение направляющего усилия колесной пары и улучшенную устойчивость автомобиля. Компания Siemens внедрила активный демпфер рыскания (ADD) в электровозы (типы ES64F4 и ES64U2 [117]) и намеревается использовать эту систему для нового поколения локомотивов «Vectron».
В последнее время все больше внимания уделяется концепции ASW. Далее описываются испытания на роликовых стендах и полевые испытания, проведенные в разных странах.
Umehara et al. [94] разработали рулевую тележку по схеме, показанной на рис.23 верно. Для каждой тележки имеется только один электрогидростатический привод (EHA), который сконструирован с использованием специальной схемы и клапанов, чтобы исключить любой риск обратного управления приводами [118]. Если происходит обратное рулевое управление, привод не будет создавать усилия, то есть исполнительная система является отказоустойчивой. Испытание было проведено на скорости 10 км / ч на касательной колее для проверки отказоустойчивой функции привода EHA, показав отсутствие увеличения направляющей силы колесной пары в случае обратного рулевого управления.
Примерно в 2010 году Корейский научно-исследовательский институт железных дорог провел эксперимент по испытанию роликовой установки в масштабе 1: 5 на основе механической конструкции, показанной на рис.23 осталось [93]. Было реализовано идеальное рулевое управление, основанное на идеальном поперечном смещении колесной пары, при условии идеальной конической формы колес. В этом эксперименте применяются электромагнитные линейные приводы. Испытания показали улучшение поперечного смещения колесной пары и направляющей силы.
После этой работы был проведен ряд исследований, посвященных новому рулевому механизму, от моделирования до испытаний на трассе. Стратегия управления основана на радиальном положении колесной пары в кривых, как представлено в Разд.5.2.2 (а.1). Предлагается метод оценки радиуса кривой в реальном времени, в котором единственным измерением является относительное смещение между двумя точками от кузова автомобиля и тележки соответственно [97]. Был создан специальный электромеханический привод, в котором вращение приводного двигателя используется вместе с рычагами для достижения линейного движения стержней на обоих концах, как показано на рис. 27 (слева), в отличие от обычного линейного привода. Таким образом, с каждой стороны тележки имеется только по одному исполнительному устройству.Кроме того, конструкция первичной резиновой пружины изменена для достижения меньшей продольной жесткости. На рисунке 27 (справа) представлен прототип рулевой тележки, который впервые был поставлен на рельсы для стационарного эксперимента по изучению движения исполнительной системы [119]. Сигнал кривизны, измеренный заранее, был отправлен в систему управления для моделирования реальной информации о треке, а затем были проведены измерения угла рыскания колесной пары и силы срабатывания. Принимая во внимание техническое обслуживание и стоимость системы измерения угла рыскания, для управления смещением привода применяется упреждающее управление.Следовательно, измерение угла рыскания колесной пары предназначено только для оценки движения колесной пары. Максимальная ошибка между эталонным углом поворота и измеренным составляет 8%. Кроме того, в контроллере есть функция самодиагностики. При обнаружении сигнала ошибки исполнительная система переключается в пассивный режим тележки.
Рис. 27Приводное устройство для рулевого управления [97] (слева) и прототип рулевой тележки [107] (справа)
В недавней публикации [107] представлены экспериментальные результаты, выполненные на коммерческой линии.Оценка кривизны и угла поворота удовлетворительны с максимальной погрешностью 2,4% и 4,9% соответственно. Боковое усилие колеса значительно снижено, а в общей сложности 1000 км пробных пробегов показали незначительный износ гребней на колесах.
В Китае CRRC представила прототип нового поколения метро «Cetrovo», оснащенного системой активного рулевого управления [120]. Доктор Ван Сюй, старший инженер центра исследований и разработок, CRRC Qingdao Sifang Co. Ltd., представляет нам недавний прогресс.В системе рулевого управления используются гидравлические сервоприводы. Опорное смещение привода вычисляется в соответствии с кривизной пути, полученной с помощью базы данных кривизны пути и технологии геолокации. Недавно были завершены первоначальные полевые испытания, которые показали значительное улучшение с точки зрения направляющей силы колесной пары и шума от контакта колеса с рельсом.
Компания Bombardier разработала двухэтажный поезд TWINDEXX [121], в котором реализовано активное рулевое управление.Однако до сих пор не публиковалось никакой дополнительной технической информации, и текущий статус разработки неизвестен.
Следует отметить, что при приближении к окончательной реализации активной первичной подвески следует серьезно отнестись к отказоустойчивости систем активной подвески. Хотя положительные эффекты были подтверждены, в то же время необходимо надлежащим образом решать вопросы безопасности. В вышеупомянутых работах выполнены некоторые отказоустойчивые конструкции. В будущем постоянное внимание следует уделять отказоустойчивой конструкции исполнительной системы.
Колеса с независимым вращением
Помимо активной первичной подвески для колесных пар с неразъемной осью, колеса с независимым вращением являются еще одним решением для преодоления хорошо известной проблемы компромисса между стабильностью движения и характеристиками поворота. По сравнению с колесными парами со сплошной осью изменение конфигурации колесной пары позволяет колесам одной оси независимо вращаться относительно друг друга. Таким образом устраняется зависимость между рысканием и поперечным перемещением колесной пары, что практически устраняет продольную силу скольжения на границе раздела колесо-рельс.Таким образом, чистое качение больше не зависит от бокового положения колесной пары, что значительно снижает износ, а также препятствует движению при движении (Goodall и Mei [122] и Pérez et al. [123]). Кроме того, если использование двухосных железнодорожных транспортных средств рассматривается вместе с IRW, как описано Курцеком и Валенте [124] для проекта «Поезд следующего поколения» (NGT), конфигурация двухэтажного поезда с непрерывным низким полом будет возможный. Одно из первых применений IRW было представлено в 1941 году Тальго, в котором способность пассивного рулевого управления была достигнута за счет связи между колесами [106].Первое решение Talgo показано на рис. 28. IRW также применяются в низкоскоростных приложениях, таких как трамваи [125].
Рис. 28Решение Тальго 1941 года [106]
Тем не менее, при снятии ограничения между колесами возникают некоторые недостатки. Отсутствие сцепления между колесами приводит к потере способности самонаведения [122, 123], что в конечном итоге приводит к контакту фланца. Кроме того, Гудолл и Мей [122] продемонстрировали с помощью линеаризованной модели двухосного транспортного средства, что динамическая нестабильность все еще присутствует в конфигурации IRW.Кроме того, продольные силы ползучести на границе раздела колесо-рельс не могут быть полностью устранены и все еще могут влиять на устойчивость колесной пары [126, 127]. Активные решения для IRW впервые были введены Мей и Гудоллом [3, 92]. Отсутствие возможности самонаведения и риск динамической нестабильности приведет к плохой езде, шуму и износу, и их необходимо решать либо с помощью пассивной конструкции, как это сделано Talgo, либо с помощью активного управления. Этот аспект четко указан в литературе Мей и Гудолл [92], Гудолл и Мей [122] и Гретчель и Бозе [128].
Для обеспечения наведения и стабильности могут использоваться различные типы мехатронных конфигураций IRW. По определению Bruni et al. [4, 129] и впоследствии принятые в качестве определений, можно разделить активную первичную подвеску, относящуюся к IRW, на три основные категории: AIRW [92], DIRW [128] и DSW [130].
Существуют и другие пассивные конструкции, помимо конструкции Talgo (колесная пара с дифференциальной муфтой [131], очевидно независимо вращающиеся колеса [132], обратная конусность протектора [133]), но они не рассматриваются в данной работе.
Принципы и конфигурации
- а)
Независимо вращающееся колесо с приводом (AIRW)
Концепция AIRW (рис. 29) основана на возможности управления рысканием и поперечным смещением общей оси, на которой установлены независимо вращающиеся колеса, с помощью внешнего привода.Это может быть сделано либо путем прямого приложения крутящего момента к оси (Goodall et al. [122, 134, 135] и Mei et al. [136]), либо с помощью линейного привода (Pérez et al. [123] , 137]). Пример на рис. 29 показывает эту последнюю возможность. Возможность использования полуактивного подхода была показана Mei et al. [8] где рассматриваются амортизаторы MR. Используя двухосную линейную модель, Мей и Гудолл [92] доказали, что крутящий момент, необходимый для управления AIRW, ниже, чем требуемый для автомобиля с твердой осью, из-за раннего нулевого продольного проскальзывания.Комбинация AIRW и DIRW была представлена Perez et al. [137].
Рис.29Колесо с независимым приводом (AIRW)
- (b)
Колесо с независимым вращением (DIRW)
Концепция DIRW (Рис.30) основана на возможности управления скоростью двух колес одной оси автономно. Во-первых, это было сделано путем приложения дифференциального крутящего момента, создаваемого электрическими серводвигателями через коробку передач, соединяющую два колеса, по Gretzschel et al.[128, 138]. В последнее время, благодаря достижениям в методах управления асинхронными асинхронными двигателями, каждому колесу назначается двигатель переменного тока. Затем они используются для обеспечения тяги, управления колесом и контроля устойчивости. Двигатели могут быть установлены снаружи и подключены к колесной паре через редуктор (Перес и др. [137], Лян и др. [139, 140], Ан и др. [141], Лу и др. [142] и Фархат. и др. [98, 143]), как показано на рис. 30, или встроенными в колеса (Мэй и др. [144], Джи и др. [145] и в проекте «Поезд следующего поколения» в [124], [146 147 148 149]).Отсутствие дополнительных приводов приводит к уменьшению пространства, необходимого для рамы колесной пары, и к возможности обеспечивать как тягу, так и управление в рамках одной и той же системы, снижая стоимость и повышая надежность. Таким образом, решение DIRW является привлекательным решением и в последние годы было предметом обширных исследований.
Рис.30Колесо с независимым приводом (DIRW)
- (c)
Колеса с прямым управлением (DSW)
Концепция DSW (Рис.31) включает удаление общей оси между колесами, которая заменяется рамой, на которой установлены два колеса, соединенные поперечной рулевой тягой. Таким образом, можно управлять двумя колесами напрямую. Приведение в действие может быть обеспечено путем перемещения рулевой тяги (Акнин и др. [130] и Виккенс в [150], [151]), как показано на рис. 31, или путем приложения дифференциального крутящего момента через тяговые двигатели на ступице ( Пауэлла в [152]). Конфигурация DSW с возможностью самоуправления была представлена Michitsuji et al.[153,154,155]. Викенс также показал в [151], что проблема устойчивости, достигаемая за счет активного управления, меньше зависит от трения и сцепления, чем с другими типами активного управления. Тем не менее эта идея — одна из наименее изученных.
Рис.31Колеса с прямым управлением (DSW)
Стратегии управления для устойчивости и управления
В этом разделе стратегии управления, предложенные для решения проблем устойчивости и управления, обсуждаются с точки зрения: (a) управления устойчивостью и (b) наведение и рулевое управление.
- (a)
Контроль устойчивости
Контроль устойчивости направлен на увеличение скорости движения транспортного средства за счет уменьшения возможного нестабильного движения колесной пары. При необходимости в IRW контроль устойчивости должен применяться в сочетании с контролем наведения. Фактически, как упоминалось выше, отсутствие механизма самоцентрирования в IRW делает наличие активного управления наведением настоятельно рекомендованным, когда пассивные решения отсутствуют. Проблема устойчивости особенно очевидна при снятии продольных подвесов.Хотя и AIRW, и DIRW могут совместно использовать некоторые стратегии управления, в целом это не верно для DSW из-за его особенностей.
- a.1
Дифференциальная обратная связь по скорости рыскания
Подход с разницей в скорости рыскания для стабилизации IRW относится к приводимому типу (AIRW). Тем не менее, его можно применять на различных типах IRW. Этот подход был предложен Гудоллом и Мей [122]. Здесь демпфирование рыскания для каждой колесной пары активно вводится в систему посредством обратной связи о разнице между колесной парой и скоростью рыскания тележки / кузова автомобиля.Этот выбор сделан, чтобы упростить выявление проблем при реализации концепции. Более того, в своих исследованиях Гудолл предложил адаптировать управляющее усилие в зависимости от скорости поезда [122], [135]. Впоследствии Мей и Гудолл в [134] разработали управление \ (H _ {\ infty} \) с использованием μ-синтеза, основанного на той же концепции, что описана выше. Это необходимо для преодоления проблемы изменения параметров, немоделированной динамики исполнительного механизма и необходимости простой модели для описания сложности реального поезда.Эта концепция была дополнительно исследована Mei et al. [8]. Полуактивный подход с использованием амортизаторов MR используется с учетом того, что требуемое управляющее усилие намного ниже, чем то, что требуется для неразрезной оси с той же целью управления. Более того, можно рассматривать только сигналы обратной связи, которые находятся в фазе с управляющей силой [135]. Проблема стабильности была менее важной в работе Perez et al. [123, 137] из-за рассмотрения обычной тележки с продольной подвеской.
- a.2
Абсолютная обратная связь по скорости рыскания
Абсолютная обратная связь по скорости рыскания обеспечивает стабильность DIRW за счет управления скоростью вращения двух колес через общий редуктор или дифференциальными моментами, обеспечиваемыми независимыми колесными двигателями. Первый подход был предложен Gretzschel et al. [128, 138]. В этой работе стабильность и руководство рассматриваются одновременно. Скорость рыскания ведущей оси вместе с поперечными смещениями передней и задней оси передаются обратно в общий ПИД-регулятор, который устанавливает направление и величину крутящего момента, создаваемого двигателем рулевого управления через редуктор, который соединяет два колеса на та же ось.Тот же подход был изучен Liu et al. [156], где используются каскадные ПИД-регуляторы вместо обычного ПИД-регулятора. Здесь каждая колесная пара управляется отдельной схемой каскадного управления, а управление дифференциальным крутящим моментом применяется вместо общей коробки передач.
- a.3
Абсолютная жесткость по рысканью
Абсолютная жесткость по рысканью направлена на повышение устойчивости IRW за счет активного введения жесткости по рысканью через обратную связь по углу рыскания. Этот подход основан на возможности измерения угла рыскания, что может оказаться невозможным в реальных приложениях.Абсолютная жесткость рыскания для DIRW была представлена Mei et al. [144], где используются синхронные двигатели с постоянными магнитами со встроенными колесами. Желаемая жесткость по рысканью достигается за счет дифференциального крутящего момента, создаваемого двумя двигателями. Измерение угла рыскания проходит через фильтр верхних частот, чтобы влиять только на кинематическое поведение и не мешать квазистатическому поведению, например, наведению и повороту. Основываясь на том же принципе, действие стабильности для этого контроля было проверено на испытательном стенде и сравнено с результатами моделирования Лянга и Ивницки [139, 140].
- a.4
DSW
Что касается конфигурации DSW, стабилизация достигается простым применением управления наведением с большим запасом устойчивости по отношению к скорости, как показано Виккенсом в [150, 151]. В [151] Виккенс сравнил пределы устойчивости обычного пассивного транспортного средства, контроль релаксации рыскания, ASW и DSW, показав, что только для конфигурации DSW не существует пределов устойчивости для изменения скорости и эквивалентной конусности.
Сравнение вышеупомянутых схем контроля устойчивости кратко представлено в таблице 4.
Таблица 4 Сравнение различных схем контроля устойчивости на IRW- (b)
Управление наведением и рулевым управлением
Управление наведением необходимо, когда рассматриваются высокоскоростные приложения IRW при отсутствии других пассивных решений, особенно с учетом AIRW и DIRW. Как упоминалось ранее, управление наведением направлено на активное восстановление механизма самоуправления и обеспечивает возможность управления. Часто управление наведением применяется вместе с контролем устойчивости.Как упоминалось в разделе, посвященном контролю устойчивости, конфигурация DSW основана на различных подходах по сравнению с двумя другими конфигурациями. Фактически, механические конфигурации обычно предпочтительны для DSW для восстановления способности к самоцентрированию.
- b.1
Равная скорость колес
Управление двумя колесами, чтобы иметь одинаковую скорость, будет имитировать поведение колесной пары со сплошной осью. Таким образом восстанавливаются наведение и механизм самоцентрирования, что приводит к возможности столкнуться с теми же проблемами, что и у сплошной колесной пары.Этот подход был предложен Goodall et al. [122, 135] для AIRW. Внешний привод будет управлять колесной парой IRW таким образом, чтобы разность скоростей двух колес была установлена на ноль. Также была введена проблема адаптации. Как упоминалось для части устойчивости, управление \ (H _ {\ infty} \) с использованием μ-синтеза было впоследствии развито в [134]. Что касается DIRW, тот же подход может быть использован, когда разница в скорости вращения колес регулируется непосредственно через моторы колес. Ji et al. [145] изучили зависимость между точностью управления синхронными двигателями и зазором между рельсовыми колесами и предложили оптимизированный профиль протектора для уменьшения этой зависимости.Представлена модель синхронных двигателей, в которой рассмотрены пульсации крутящего момента, создаваемые неоднородным магнитным полем и токами высших гармоник статора. Лю и др. [156] объединили абсолютную обратную связь по скорости рыскания (1.b) с управлением равной скоростью колес в каскадном ПИД-регулировании. Улучшение характеристик движения транспортного средства обнаруживается, когда каскадное управление применяется по отношению к применению только управления равной скоростью колес.
- b.2
Ненулевой боковой зазор
Что касается AIRW, подход к восстановлению наведения был предложен Pérez et al.[123, 137]. Чтобы избежать контакта фланца, боковой зазор установлен на ноль. Из-за непрактичности измерения поперечного смещения колесной пары относительно осевой линии пути выводится опорный сигнал для разницы скоростей колес на основе кривизны пути и скорости поезда. Эталонное значение получается из динамических уравнений, описывающих систему. Установлено, что разница в скорости колес связана с остальными переменными с помощью передаточной функции первого порядка с малой постоянной времени, что позволяет пренебречь этим вкладом в частотном диапазоне управления наведением.Затем соотношение упрощается за счет рассмотрения квазистатического состояния во время изгиба. Сделанные упрощения в конечном итоге приводят к ошибке полученного бокового смещения относительно центральной линии.
- b.3
Нулевой боковой зазор
Часто применяется альтернативный подход к ненулевому боковому зазору. Здесь IRW контролируется так, чтобы он находился на центральной линии и, таким образом, имел нулевой боковой зазор. Такой подход предполагает необходимость измерения бокового смещения колесной пары или использование процедур оценки.Этот подход обычно применяется к DIRW, где могут быть введены дополнительные переменные обратной связи. В рамках проекта «Поезд следующего поколения» Курцек и др. Использовали управление частичным разрядом. [146] для реализации подхода с нулевым боковым просветом. В своем исследовании Курцек сосредоточил внимание на максимальном крутящем моменте и мощности, необходимых из-за неровностей пути. Здесь вводится ограничитель крутящего момента, и используется оптимизация поиска шаблона для настройки контроллера с целью уменьшения износа криволинейной дорожки с неровностями.Используя тот же подход к управлению, но сосредоточив внимание на управлении синхронным двигателем, Ahn et al. [141] успешно показали эффективность этой схемы управления на испытательном стенде в масштабе 1: 5. Действие прямой связи было введено Гретером в [147] для компенсации гироскопического момента, вводимого в систему на переходных кривых. Затем эту концепцию использовали Heckmann et al. [148] в сочетании с управлением с обратной связью по боковому смещению, углу рыскания и скорости рыскания колесной пары. В своей работе Хекманн также представил подход к планированию усиления, основанный на скорости транспортного средства, чтобы избежать возможной нестабильности управления, вызванной изменением скорости.Затем Grether et al. Применили предыдущий элемент управления для улучшения характеристик задней колесной пары. [149]. Информация о ведущей тележке используется для расширенного управления ведомой тележкой, что приводит к дальнейшему улучшению показателей износа.
Используя в качестве обратной связи боковое смещение и угол рыскания колесной пары IRW, Лу и др. [142] разработали надежное управление крутящим моментом с использованием μ-синтеза. Чтобы упростить модель, управление основано только на модели колесной пары IRW с использованием силы и крутящего момента тележки в качестве внешних входных данных.Затем результаты моделирования проверяются экспериментально на испытательном стенде в масштабе 1: 5.
Сравнение характеристик управления между ASW, SYC и DRIW, управляемым с нулевым боковым зазором, было предложено Farhat et al. в [98]. Проведено моделирование, показывающее, что в изученных случаях DIRW работает лучше, чем другие решения. В частности, SYC — наименее выгодный метод. Тем не менее, Farhat et al. [143] показали, что ухудшенные характеристики можно увидеть в расходящемся маршруте переключателей по сравнению со стандартными твердыми колесными парами, особенно для высокоскоростных переключателей.Однако это не относится к сквозному маршруту.
- b.4
Дифференциальный контроль тяги
Комбинацией концепций AIRW и DIRW, Pérez et al. [137] обеспечил рулевое управление с помощью концепции AIRW и руководство с помощью концепции DIRW. Чтобы облегчить задачу рулевого управления части AIRW, крутящий момент на двух колесах регулируется таким образом, чтобы он был равен части DIRW. Таким образом, контактные силы на левом и правом колесе практически одинаковы.В [137] была представлена динамическая модель синхронного двигателя. Используется метод разделения уравнений поля и обмотки якоря, а управление спроектировано с учетом постоянной тока возбуждения.
- b.5
DSW
На DSW первый подход к наведению был предложен Викенсом в [150], где колеса поворачиваются под углом, пропорциональным ошибке слежения. Ошибка отслеживания здесь определяется как ошибка положения транспортного средства относительно осевой линии пути.Впоследствии пассивная тележка с возможностью самоуправления была представлена Michitsuji и Suda в [153]. Здесь вводится действие с прямой связью для улучшения поведения транспортного средства во время перехода по кривой путем компенсации возмущений, возникающих из-за изменения кривизны пути во времени. Эффективность решения продемонстрирована результатами моделирования и экспериментальных, проведенных на испытательном стенде в масштабе 1:10.
В таблице 5 сравниваются функции различных элементов управления навигацией.
Таблица 5 Сравнение различных схем управления наведением на IRWРеализация
Управляемые независимо вращающиеся колеса представляют собой интересную концепцию, имеющую потенциальные преимущества перед активно управляемыми твердотельными колесными парами.Тем не менее, известные реализации состоят из масштабированных моделей, за исключением описанных в [157].
Первое применение концепции DIRW было разработано DLR в 1999 г. Гретчелем и Бозом [128] и получило дальнейшее развитие в [138]. На испытательном стенде в масштабе 1: 5, показанном на рис. 32, управление дифференциалом обеспечивается внешним серводвигателем, установленным непосредственно между двумя колесами через коробку передач. Примененная процедура масштабирования вместе с полученными результатами приведена в [158].
Фиг.32Первый испытательный стенд в масштабе 1: 5 для DIRW [138]
Колесная пара в масштабе 1: 5 была разработана и испытана Liang et al. [139], [140]. Рассматривались двигатели как постоянного, так и переменного тока. Испытывались только двигатели переменного тока. Применялись равные скорости вращения колес и управление с обратной связью по абсолютной скорости рыскания. Обнаружено хорошее согласие результатов моделирования и экспериментов. Кроме того, сообщается, что поведение испытательной колесной пары с и без управления абсолютной обратной связью по скорости рыскания демонстрирует значительные улучшения при применении этого управления.Другой испытательный стенд в масштабе 1: 5 был реализован Ан и др. [141], представляющий систему метро большой глубины, где было применено линейное масштабирование. Используются поверхностные синхронные двигатели с постоянными магнитами и применяется стратегия нулевого бокового зазора с использованием насыщенного ПИ-регулятора. На рис. 33 показан вышеупомянутый испытательный стенд.
Рис. 33Испытательный стенд в масштабе 1: 5 для подземной системы большой глубины [141]
Надежный подход к управлению был успешно применен Лу и др. На испытательном стенде 1: 5.[142]. Масштабируемое транспортное средство движется по реальной дороге с уменьшенной шириной колеи, в отличие от большинства приложений, которые включают испытания на экспериментальных транспортных средствах IRW. Контроль нулевого бокового зазора применяется там, где датчики смещения вихревых токов используются как на левом, так и на правом колесе. Затем эти два сигнала используются для оценки поперечного смещения колеса от рельса и угла рыскания. На рис. 34 показан экспериментальный автомобиль.
Рис. 34Транспортное средство в масштабе 1: 5 на масштабном пути [142]
Другой подход был выбран Oh et al.[159]. Вместо разработки масштабной модели транспортного средства для изучения поведения полноразмерного колесного двигателя в реальном времени используется подход аппаратного цикла (HIL). Линейная модель транспортного средства используется для моделирования поведения транспортного средства, в котором также учитывается продольная динамика. Моделирование и двигатель колеса связаны с двигателем нагрузки. Использование линейной модели оправдано необходимостью запуска модели в реальном времени, в то время как более сложная нелинейная модель может вызвать задержку во времени при вычислении динамики транспортного средства, что в конечном итоге затруднит реализацию HIL.Автомобиль управляется с использованием стратегии нулевого бокового просвета. Схема эксперимента показана на рис. 35. Те же авторы разработали обмотки якоря колесного двигателя для улучшения его характеристик [160, 161].
Рис. 35Конфигурация аппаратного тестирования в контуре [159]
Применение DSW было предложено Michitsuji et al. [153] на модели тележки EEF в масштабе 1:10 (рис. 36). Автомобиль был испытан на 25-метровой трассе с радиусом изгиба 3,3 м, что соответствует очень узкой кривой 33 м в реальном масштабе.Управляемость транспортного средства улучшена за счет упреждающего управления, которое помогает самоуправляемой способности предлагаемой конструкции во время переходных кривых. На круговой части поворота автомобиль не управляется активно. Сообщается об удовлетворительном согласии между результатами моделирования и эксперимента.
Рис. 36Испытание тележки в масштабе EEF 1:10 [153]
Оптимизация вибрационного комфорта легковых автомобилей посредством улучшения подвески и резиновых опор двигателя
Целью данной работы является разработка методологии измерения для выполнить анализ вибрации автомобиля.Он предлагает новые настройки систем подвески, включая пружины, амортизаторы и резиновые опоры системы двигателя, для повышения уровня комфорта пассажиров. Анализируется влияние каждой из этих модификаций на уровни вибрации в конкретных точках. Важность анализа человеческого взаимодействия очевидна, поскольку в прошлом его часто игнорировали. Это связано с тем, что в проектируемых транспортных средствах, как правило, подчеркивается только динамическое поведение транспортного средства. Таким образом, в этой работе подчеркивается, что опасения по поводу уровня вибрации, создаваемой человеком, приводят к созданию транспортных средств с хорошими характеристиками, а также с уровнем комфорта, уделяя особое внимание благополучию пользователей.Испытывается комбинация различных комплектов резиновых опор, пружин и амортизаторов. Предлагаемые в данной статье изменения анализируются последовательно, и по результатам предлагается лучшая комбинация.
1. Введение
При разработке транспортного средства обычно используется так называемый анализ комфорта транспортного средства (или VCA). Это включает количественную оценку уровня комфорта, воспринимаемого пользователем, сопоставление амплитуд и частот на различных поверхностях с субъективными и объективными оценками их влияния на человеческое тело.
Изменения в частях системы подвески автомобиля, таких как комплект пружин и амортизаторов, а также резиновые опоры системы двигателя, сделаны для обеспечения хорошего уровня комфорта для пользователей, как статического, так и динамического.
Многие статьи были опубликованы на основе этого типа анализа, проведенного на транспортном средстве, с упором только на их влияние на определенные части системы [1–6]. В некоторых статьях используются условия, аналогичные условиям тестового трека в этой статье [7, 8], а в других используются различные методологии [9–11].
Существуют также статьи, в которых выполняются измерения того же типа, но с акцентом на вибрации в более высокочастотном спектре, с целью изучения дискомфорта, вызываемого шумом, вибрацией и резкостью [12, 13].
Методология анализа комфорта транспортного средства (VCA) может быть использована как на этапе разработки концепции, так и при некоторых последующих ремонтах.
В этой статье предлагается использование методологии VCA для анализа уровней комфорта транспортного средства в соответствии с заданными уровнями вибрации [14].Таким образом, можно сравнивать с автомобилями конкурентов на рынке, изучать улучшения конкретных деталей, анализировать предложения, которые приводят к снижению затрат, и указывать решения для выявленных проблем, среди прочего.
Предлагаемый анализ сосредоточен не на самих вибрациях автомобиля, а на влиянии заявленных пользователем вибраций. Таким образом, важно знать, что человеческое тело имеет некоторые собственные частоты, которые при резонансе с частотами, присутствующими в транспортном средстве, могут вызывать симптомы, от небольшого дискомфорта до головокружения и тошноты [15, 16].
Затем, во время разработки транспортного средства, связь этих частот должна быть сбалансирована наилучшим образом, избегая, например, того, чтобы двигатель и подвеска работали на одних и тех же частотных уровнях, попадая в резонанс, что сделало бы водитель ощущает сильную вертикальную вибрацию на ногах.
Исследование твердого тела двигателя и собственных частот очень важно, поскольку они имеют отношение к вибрационному комфорту в транспортном средстве. Этот вызванный двигателем эффект называется сотрясением двигателя.Как следует из названия, это связано с движением двигателя, частота колебаний которого совпадает с частотным спектром некоторых возбуждений, исходящих от подвески. Следовательно, между двигателем (в режиме его работы) и подвеской автомобиля (под воздействием гусеницы) общие определенные частоты. Оба возбуждают кузов автомобиля, напрямую влияя на комфорт внутри автомобиля.
Это происходит следующим образом: (i) неподрессоренная масса возбуждается дорожкой с определенной частотой.Отклик представляет собой собственную частоту подвески, добавленную к частоте гусеницы. (Ii) Кузов автомобиля возбуждается этой неподрессоренной массой, добавляя к вышеупомянутым частотам частоты колебаний самого кузова автомобиля. (Iii) Двигатель возбуждается. кузовом автомобиля, заставляя его иметь три предыдущие частоты плюс частоты вибрации самого двигателя. (iv) Наконец, корпус автомобиля возбуждается двигателем на его частотах колебаний. Они соответствуют вибрации, исходящей от гусеницы через подвеску, вызывая увеличение амплитуды вибрации.
Резонансы в интересующем диапазоне частот получаются акселерометрами, установленными на транспортном средстве, что позволяет анализировать, приемлемы ли уровни сотрясения двигателя или превышают лимит.
Упомянутое поведение можно легко увидеть ниже в области, отмеченной желтым цветом, которая показывает разницу между движением неработающей педали и направляющей сиденья, то есть эффект сотрясения двигателя.
Такая разница возникает из-за того, что неработающая педаль находится ближе к двигателю, что делает ее более подверженной влиянию вибрации двигателя, тогда как направляющая сиденья подвергается меньшему влиянию.
Глядя на рисунок 1, можно заметить, что у направляющей сиденья амплитуды в режимах двигателя близки к 0,015 г, а в режимах подвески близки к 0,022 г, что практически одинаково, тогда как при неработающей педали колебания составляют 0,045 г для двигателя и 0,020 г для подвеса, что облегчает визуализацию.
Важно помнить, что значительная часть улучшения уровней вибрации двигателя является результатом субъективных выводов водителей-испытателей. Это связано с тем, что упомянутый резонанс выразительно воспринимается человеческим телом и из-за того, что он хорошо воспринимается, вызывает большой дискомфорт.Таким образом, всегда следует избегать сильных сотрясений двигателя.
2. Материалы и методы
Для проведения измерений вибрации и наблюдения за тем, находятся ли частоты и амплитуды в пределах ожидаемых значений, следует принять стандартную процедуру. Это включает в себя приборы, которые будут использоваться, условия трека для каждого испытания, подробности о том, как следует проводить анализ сигналов и как снять приборы с транспортного средства, не нанося какого-либо ущерба оборудованию, поскольку оно очень чувствительно к ударам.Чтобы соответствовать правилам, установленным методологией, ко всем деталям следует относиться внимательно, поскольку они несут ответственность за надежность и приемлемость этого анализа среди производителей автомобилей. Это также важно в конце сбора данных, чтобы можно было сравнить с ранее полученными данными.
В этой статье регистрация проводилась в смешанных условиях трека [8]. Их можно рассматривать как стандарты при использовании транспортных средств в Бразилии, стремясь максимально приблизить результаты к тому, что конечный пользователь воспринимает в своей повседневной деятельности.В большинстве случаев, за исключением решения конкретных проблем, чтобы получить результаты, максимально приближенные к реальному использованию автомобиля, измерения проводятся в трех условиях: ровный грунт (новый асфальт), неровный грунт (отремонтированный асфальт) и грубый грунт ( суровый асфальт) [7].
Объективные оценки подтверждаются измерением энергии уровней вибрации в определенных точках транспортного средства, которые при оснащении инструментами показывают, как автомобиль ведет себя в различных ситуациях. Субъективная оценка производится инженерами, обученными ощущать дискомфорт в автомобиле, чего в некоторых случаях обычные пользователи не замечают.
В тестах, проведенных в этой статье, уровень комфорта транспортного средства оценивается путем сравнения сигналов, полученных от прототипа с различными настройками подвески, а также от эталонного транспортного средства от того же производителя и с той же рыночной позицией.
Трехосные акселерометры используются для измерения уровней вибрации в каждой из требуемых точек автомобиля. Эти точки должны быть оснащены инструментами, чтобы зависеть от направленности анализа, и они могут быть следующими: ступицы каждого колеса; четыре точки крепления амортизатора в шасси; три резиновые опоры двигателя; сиденье; спинка; поручень сиденья; мертвая педаль; и руль.
Бывают случаи, когда для конкретных исследований используются другие точки. Однако в этих случаях собранные сигналы используются только для сравнения в этих конкретных исследованиях, поскольку они не сопоставимы со стандартными сигналами, которые регулярно используются.
Для настоящего исследования отслеживаемые точки представлены в таблице 1.
| |||||||||||||||||||||
GPS используется для получения сигналов скорости. Скорость транспортного средства собирается и записывается по всем трекам сбора данных, чтобы иметь возможность проверить сигнал. Это должно быть достигнуто при постоянной скорости, предварительно определенной для каждого трека. Важно проверить давление в шинах, положение оси акселерометров вдоль автомобиля и исключить смещение используемых датчиков.
По окончании контрольно-измерительной аппаратуры следует проверить работу датчиков, чтобы убедиться в качестве сигнала.Программное и аппаратное обеспечение, используемое для оцифровки и сбора данных, в случае данной статьи, — это Catman® [17] и MGCplus® [18], соответственно. Используемая прогнозируемая частота сбора данных составляла 1200 Гц, что в 10 раз превышает желаемую частоту 120 Гц, чтобы предотвратить потерю качества сигнала.
В этой работе используются три типа трасс, и по каждой из них выполняется не менее пяти прогонов, чтобы гарантировать получение как минимум трех допустимых прогонов.
В таблице 2 представлено описание данных для используемых стандартных треков.