Позиционные регуляторы и двухпозицонное регулирование
Содержание
Позиционный регулятор
У позиционных регуляторов регулирующий орган может занимать два или три определенных положения. Наибольшее применение получили так называемые двух — и трехпозиционные регуляторы.
Действие позиционного регулятора происходит следующим образом. Контактный датчик регулятора связан с пером прибора при помощи рычажного механизма. При отклонении температуры от заданного значения подвижной контакт датчика приходит в соприкосновение с одним из боковых неподвижных контактов.
| Схема позиционного регулятора ПР1. 5. |
Действие позиционного регулятора основано на сравнении давления сжатого воздуха в пределах 19 6 — 98 кН / м2 ( 0 2 — 1 кгс / см2), поступающего на вход и пропорционального измеряемому параметру, и давления, устанавливаемого задатчиком, встроенным в прибор.
Схема установки для поверки позиционного регулятора ПР1. 5. 5. |
Поверку позиционного регулятора выполняют при 5 — 6 значениях заданного значения РЗ, устанавливаемых равномерно по шкале манометра 4 при работе регулятора на минимум. Затем по полученным данным определяют абсолютные и относительные погрешности прибора в поверяемых точках.
Среди позиционных регуляторов наиболее часто применяют двух-и трехпозиционные регуляторы, в которых регулирующий орган в зависимости от знака отклонения регулируемого параметра может занимать одно из двух или трех фиксированных положений.
Выбор релейного позиционного регулятора основан на характеристиках, определяющих частоту и период автоколебаний в зависимости от зоны нечувствительности. Если последние не превосходят допустимых, то тогда для рассматриваемой системы регулирования пригоден двухпозиционный регулятор.
В позиционных регуляторах зону нечувствительности называют дифференциалом регулятора. Здесь зона нечувствительности обусловлена не только трением и технологическими зазорами, но и конструкцией регулятора. Величина дифференциала может быть изменена при настройке регулятора.
Здесь зона нечувствительности обусловлена не только трением и технологическими зазорами, но и конструкцией регулятора. Величина дифференциала может быть изменена при настройке регулятора.
В позиционном регуляторе регулирующий орган может занимать, в зависимости от значения регулируемого параметра, только несколько вполне определенных положений, например в двухпозиционном регуляторе положения открыто, закрыто, причем перемещение из одного положения в другое происходит практически мгновенно.
В позиционных регуляторах зону нечувствительности называют дифференциалом регулятора. Здесь зона нечувствительности зависит от конструкции регулятора. Зачастую величина дифференциала может быть изменена при настройке.
В позиционных регуляторах и сигнализаторах давления используются те же чувствительные элементы, которые служат для измерения давления в манометрах, вакуумметрах и дифманометрах: мембраны, сильфоны и трубчатые пружины. Характерным примером позиционного регулятора давления может служить сигнализатор падения давления сильфонный — СПДС. Он применяется для сигнализации падения давления неагрессивных газов и жидкостей ниже заданной величины. Чувствительным элементом является сильфон, развивающий определенное усилие под действием измеряемого давления и воздействующий на ртутный контакт.
Характерным примером позиционного регулятора давления может служить сигнализатор падения давления сильфонный — СПДС. Он применяется для сигнализации падения давления неагрессивных газов и жидкостей ниже заданной величины. Чувствительным элементом является сильфон, развивающий определенное усилие под действием измеряемого давления и воздействующий на ртутный контакт.
В позиционных регуляторах и сигнализаторах уровня в качестве чувствительных элементов применяют поплавок или мембрану. Принцип действия мембранных чувствительных элементов основан на воздействии давления контролируемого вещества на резиновую мембрану, вмонтированную в стенку емкости. Для сигнализации уровня сыпучих материалов в качестве чувствительного элемента используются электрические проводники, действие которых основано на зависимости проводимости электрической цепи от изменения степени погружения проводников ( электродов) в слой сыпучего материала.
В позиционном регуляторе изменения регулируемого параметра влияют лишь на знак регулирующего воздействия.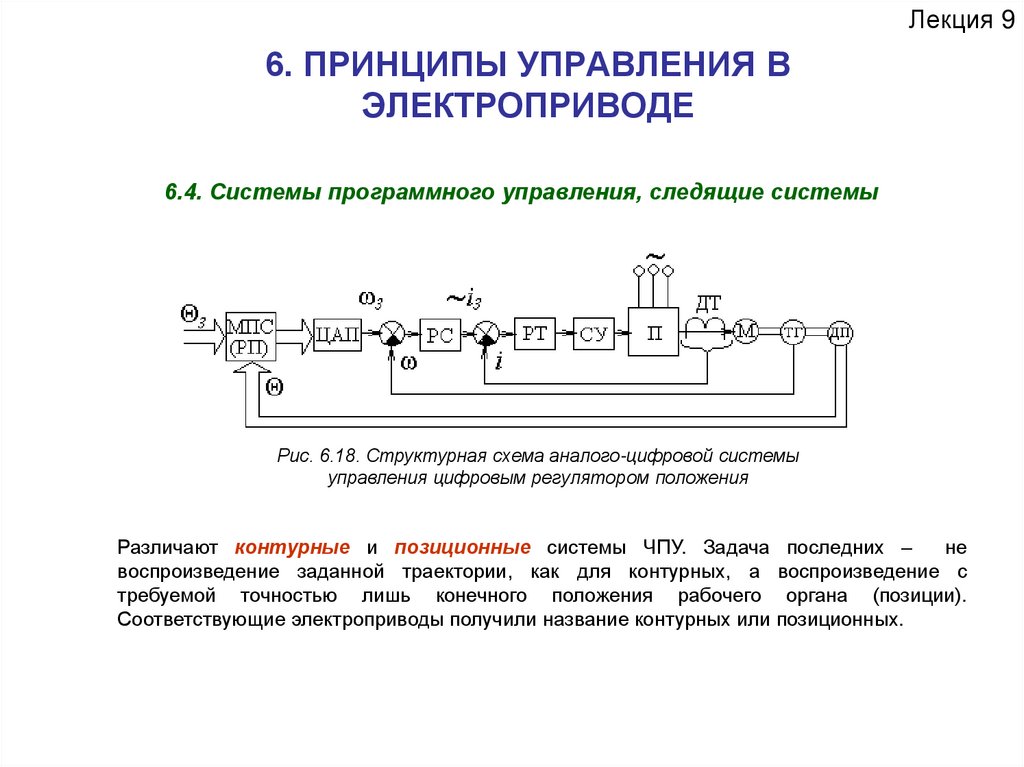 Скорость и характер перемещения регулирующего органа постоянны. В зависимости от числа возможных положений регулирующего органа позиционные регуляторы делятся на двух — и трехпозиционные.
Скорость и характер перемещения регулирующего органа постоянны. В зависимости от числа возможных положений регулирующего органа позиционные регуляторы делятся на двух — и трехпозиционные.
В позиционном регуляторе изменения регулируемого параметра влияют лишь на знак регулирующего воздействия. Скорость и характер перемещения регулирующего органа постоянны. В зависимости от числа возможных положений регулирующего органа позиционные регуляторы делятся на двух — и трехпозиционные. В двухпозиционных регуляторах регулирующий орган может занимать только два положения: открыто — закрыто, включено — выключено.
Двухпозиционный регулятор
Двухпозиционный регулятор — наиболее дешевый и поэтому наиболее распространенный тип регулятора. Устройства такого типа используются в системах отопления, холодильниках, водяных резервуарах. Если текущее значение переменной меньше заданного значения, то регулятор включен и его выходной сигнал максимальный.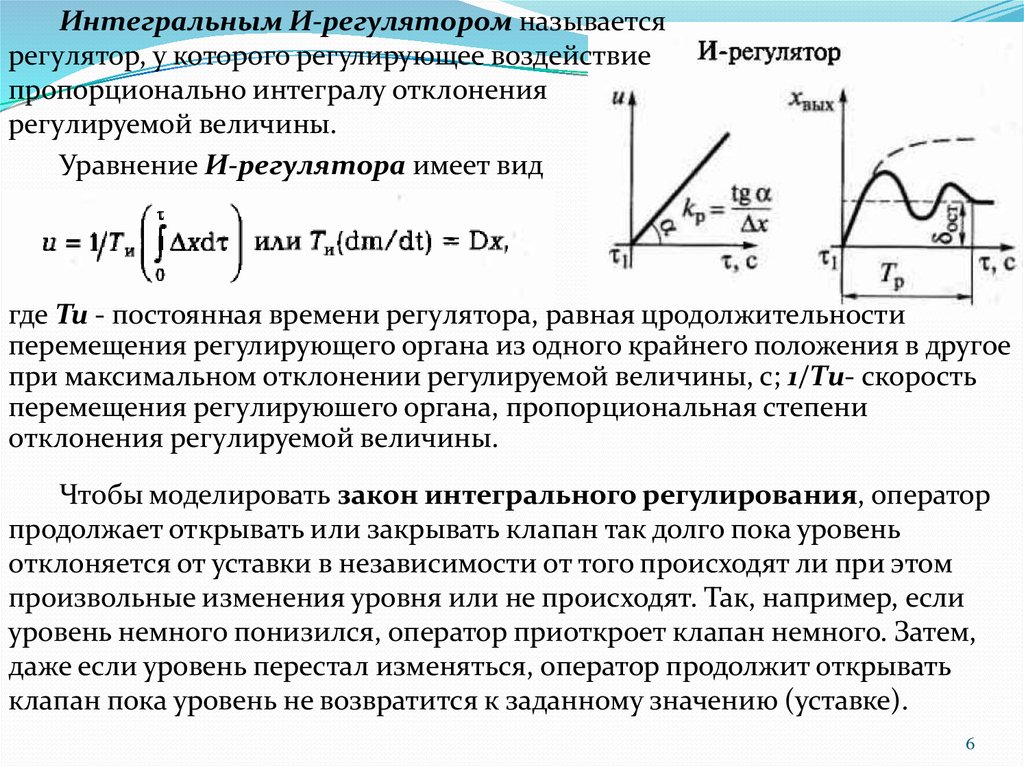 Если регулируемая переменная превышает заданное значение, то регулятор выключен и его выходной сигнал равен нулю. Из-за наличия механического трения или искрения электрических контактов переключение регулятора фактически происходит после некоторого отклонения регулируемой переменной ниже или выше заданного значения. Этот интервал ( зона нечувствительности) может быть по желанию увеличен, что приведет к уменьшению частоты включений регулятора и, следовательно, к меньшему его износу.
Если регулируемая переменная превышает заданное значение, то регулятор выключен и его выходной сигнал равен нулю. Из-за наличия механического трения или искрения электрических контактов переключение регулятора фактически происходит после некоторого отклонения регулируемой переменной ниже или выше заданного значения. Этот интервал ( зона нечувствительности) может быть по желанию увеличен, что приведет к уменьшению частоты включений регулятора и, следовательно, к меньшему его износу.
| Зависимость коэффициента передачи контура регулирования от амплитуды возмущающего воздействия при ПИ-регулировании. |
Двухпозиционные регуляторы теоретически формируют выходной сигнал, равный либо 0 % ( выключено), либо 100 % ( включено) в зависимости от знака рассогласования. Независимо от амплитуды синусоидального отклонения параметра от заданного значения такие регуляторы образуют прямоугольную волну с амплитудой, равной единице. Для определения численного значения коэффициента передачи любого устройства его выходной сигнал выражают в той же форме, что и входной. Так, 100 % — ную прямоугольную волну представляют в виде синусоиды, амплитуда которой в 4 / я раз больше амплитуды прямоугольной волны.
Для определения численного значения коэффициента передачи любого устройства его выходной сигнал выражают в той же форме, что и входной. Так, 100 % — ную прямоугольную волну представляют в виде синусоиды, амплитуда которой в 4 / я раз больше амплитуды прямоугольной волны.
Двухпозиционный регулятор обеспечивает высокий коэффициент передачи контура регулирования при больших отклонениях параметра. Очевидно, в контур регулирования нужно одновременно устанавливать двухпозиционный и линейный регуляторы. Дополнительным доводом в пользу установки двухпозиционных регуляторов в контур с большим отклонением параметра, а линейных — с малым является то, что первые лучше реагируют на изменение заданного значения параметра, а вторые — на изменение нагрузки.
Двухпозиционный регулятор воздействует на контур регулирования с максимальной скоростью, но вызывает перерегулирование параметра, возрастающее с увеличением емкости элементов контура. При этом растет и время демпфирования колебаний параметра. На рисунке приведены кривые изменения во времени регулируемой и промежуточной переменных, а также выходного сигнала регулятора при увеличении заданного значения параметра. Из графика следует, что для получения минимального времени регулирования необходимо уменьшить выходной сигнал регулятора от 100 % до величины, соответствующей номинальной нагрузке q, в момент, когда промежуточная переменная достигнет заданного значения.
На рисунке приведены кривые изменения во времени регулируемой и промежуточной переменных, а также выходного сигнала регулятора при увеличении заданного значения параметра. Из графика следует, что для получения минимального времени регулирования необходимо уменьшить выходной сигнал регулятора от 100 % до величины, соответствующей номинальной нагрузке q, в момент, когда промежуточная переменная достигнет заданного значения.
Двухпозиционные регуляторы могут успешно применяться для регулирования объектов, обладающих малым запаздыванием своего действия, значительной емкостью и небольшой чувствительностью. В других случаях они не могут обеспечить удовлетворительного качества регулирования вследствие больших переходных отклонений температуры от предписанного значения.
Двухпозиционный регулятор пилот, установленный в ГРП котельных, позволяет приспособить к нему приборы телемеханического управления.
Двухпозиционные регуляторы называют регуляторами открыто — закрыто. В трехпозиционных регуляторах регулятор может, кроме двух крайних, занимать еще одно промежуточное фиксированное положение, а в многопозиционных — несколько промежуточных положений.
В трехпозиционных регуляторах регулятор может, кроме двух крайних, занимать еще одно промежуточное фиксированное положение, а в многопозиционных — несколько промежуточных положений.
| Принципиальная схема пропорционального регулятора пневматического действия, а — схема регулятора. б — схема действия механизма пропорциональности. |
Двухпозиционные регуляторы имеют сравнительно ограниченную область применения. Многие технологические процессы требуют регуляторов с пропорциональной или статической характеристикой.
Двухпозиционный регулятор позволяет применять форсунки с менее широким диапазоном регулирования, так как при этом они должны хорошо работать только при двух режимах подачи мазута и воздуха, а не во всем диапазоне регулирования производительности форсунки.
Двухпозиционные регуляторы являются регуляторами приборного типа. В комплект этих регуляторов входит прибор, с помощью которого измеряется значение регулируемой величины.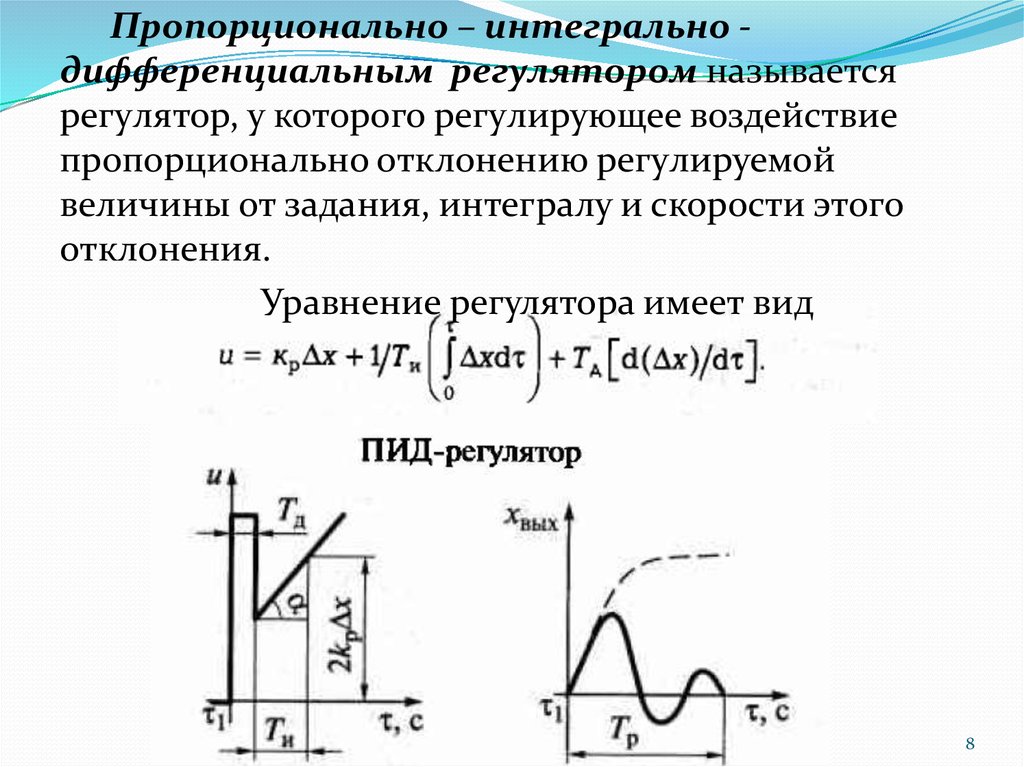 Этот же прибор содержит элементы для установки заданного значения регулируемой величины и элементы двухпозиционного регулирования.
Этот же прибор содержит элементы для установки заданного значения регулируемой величины и элементы двухпозиционного регулирования.
Двухпозиционные регуляторы могут дополняться стабилизирующими и другими устройствами, позволяющими существенно улучшить процесс регулирования.
| Схема регулятора перекладным клапаном. |
Двухпозиционные регуляторы выпускают пневматические и электрические.
Позиционное регулирование
Позиционное регулирование используют при вспашке полей с малоизменяющимся рельефом, а также при работе с навесными машинами, требующими точной установки относительно трактора.
| Схема и графики плавного регулирования производительности установки. |
Позиционное регулирование дает хорошие результаты в системах с большими емкостями, позволяющими аккумулировать холод. В этом случае увеличиваются интервалы между пуском и остановкой агрегатов и сглаживается колебание параметра.
Позиционное регулирование характеризуется скачкообразной функциональной зависимостью между отклонением регулируемого параметра от заданного значения и перемещением регулирующего органа. Каждая позиция соответствует определенной области значений регулируемого параметра. По числу позиций различают двух -, трех — и многопозиционные регуляторы. В практике наибольшее распространение получили двух — и трехпозиционные.
| Двухпдаиц иоиное регулирование температуры. |
Позиционное регулирование характеризуется скачкообразной функциональной зависимостью между отклонением регулируемого параметра от заданного значения и перемещением регулирующего органа. Каждая позиция соответствует определенной области значений регулируемого параметра. По количеству позиций различают двух -, трех — и многопозиционные регуляторы. В практике наибольшее распространение получили двух — и трехпозици-онные.
Рычага уврмлевп силовым т иозициопым регуляторам. |
Позиционное регулирование предназначено для работы с машинами-орудиями, не имеющими опорных колес, а также с машинами, работающими над поверхностью поля, например, с навесными опрыскивателями, разбрасывателями удобрений на полях с выровненным рельефом.
| Схема регулирования холодопроизводительности эжекторной холодильной машины. |
Позиционное регулирование холодопроизводительности Ъсу-ществляется путем включения и выключения главных эжекторов. При нескольких эжекторах для этого требуется герметически разделить полости испарителя и конденсатора, связанные с отдельными эжекторами, так как иначе при выключении любого эжектора давления в компрессоре и испарителе выравняются.
Позиционное регулирование СКЗ осуществляют, задавая край-1 ние значения величин тока СКЗ или разности потенциалов труба — земля, которые являются точками регулировки. Изменения режима СКЗ, при которых величины не достигают крайних значений, не вызывают включений регулирующего органа.
Позиционным регулированием называется такое регулирование, когда при непрерывном изменении параметра регулирующий орган начинает действовать только при достижении этим параметром крайних заданных значений. Применяемый в этом случае регулятор носит название позиционного регулятора. Позиционные регуляторы применяются для регулирования температуры мазута и теплоносителя в емкостях.
Закон позиционного регулирования предусматривает дискретные воздействия на объект путем задания определенных положений исполнительному органу.
Процессы позиционного регулирования являются процессами автоколебательными. Основными параметрами автоколебательных процессов являются их амплитуды и периоды колебаний.
Для позиционного регулирования и сигнализации в приборы встраивают контактные устройства. Модификации приборов имеют также пневматические устройства. Корпуса приборов обеспечивают настенный или щитовой монтаж.
Помогла ли вам статья?
Задать вопрос
Пишите ваши рекомендации и задавайте вопросы в комментариях
позиционное регулирование и с постоянной скоростью перемещения регулирующего органа. (стр 15 рис 18)
Нелинейные алгоритмы регулирования. Наиболее употребительны с релейной статической характеристикой: двухпозиционный и трехпозиционный. Автоматические регуляторы, у которых при непрерывном изменении вх величины регулирующий орган занимает ограниченное число определенных, заранее известных, положений – позиционными. Входной величиной позиционного регулятора явл рассогласование ε между заданным узд и текущим у значениями регулируемой величины (ε= узд-у), а выходной – управляющее воздействие u.
Двухпозиционные
регуляторы. Выходная величина регулятора может
принимать только два значения: минима
и мах. Статические характеристики:
допустим, что текущее значение у
регулируемой величины меньше заданного
узд,
т. е. ε>0, тогда выходная величина u
регулятора принимает мах значение
umax.
Если ε<0, то u
е. ε>0, тогда выходная величина u
регулятора принимает мах значение
umax.
Если ε<0, то u
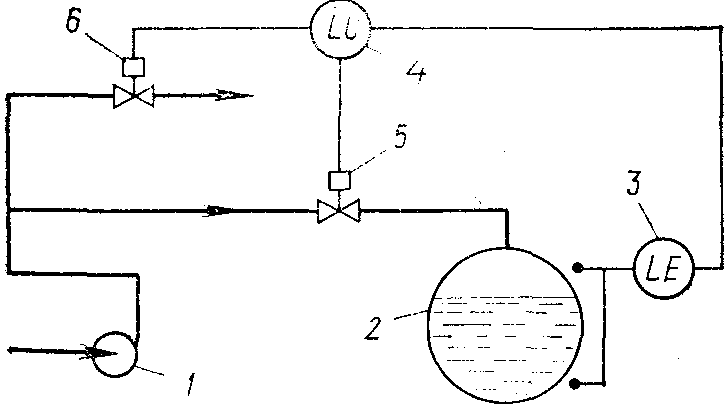
Пример: электроконтактный термометр, электроконтактный манометр.
По рисунку: 1 – термометр, 2 – термический шкаф, 3 – нагреватель, К1 – реле.
Если Т<Tзад, то контура а-в не замкнут – ток не течет, если К1-1 замкнут то течет через нагреватель.
При
выборе закона регулирования непрерывного
действия необходимо принимать во
внимание следующее. П-регуляторы могут применяться для управления
объектами с самовыравниванием и без
самовыравнивания при небольших
изменениях нагрузок, если технологическим
режимом допустимо остаточное отклонение
параметра от заданного значения
(статическая ошибка).
Выбор
того или иного закона управления
определяется в первую очередь
динамическими свойствами объекта
управления, величиной и характером
возмущающих воздействий, а также
заданными показателями качества
регулирования. Следуя тех требованиям,
в качестве заданного переходного
процесса выбирают один из трех типовых
переходных процессов:
Следуя тех требованиям,
в качестве заданного переходного
процесса выбирают один из трех типовых
переходных процессов:
Граничный апериодический с миним временим переходного процесса
С 20%-ным перерегулированием и минимальным временем первого полупериода колебаний
С миним значением интеграла от квадрата ошибки
Переходный процесс в системе управления зависит от свойств химико-техн объекта, от характера, величины и места приложения возмущающих воздействий и от закона регулирования и параметров настройки регулятора. Чтобы достичь требуемого качества регулирования для выбранного типового переходного процесса, следует принять подходящий закон регулирования и определить параметры настройки.
Предварительным
критерием выбора структуры системы
регулирования и закона действия
регулятора может служить величина
отношения времени запаздывания объекта
и постоянной времени объекта: τзап/То. для нейтральных объектов вместо То подставляют Та.
при соотношении τзап/То<0
удовлет качество регулирования можно
получить, используя однократную систему
регулирования.
для нейтральных объектов вместо То подставляют Та.
при соотношении τзап/То<0
удовлет качество регулирования можно
получить, используя однократную систему
регулирования.
В зависимости от величины этого отношения можно предварительно выбрать заон действия регулятора:
При соотношении τзап/То<0,2 и небольших изменениях нагрузки целесообразно использовать регулятор релейного действия
При соотношении τзап/То>0,2 лучшее качество регулирования обеспечивают регуляторы непрерывного действия, причем с ростом соотношения τзап/То для обеспечения требуемого качества регулирования необходимо выбирать более сложные законы регулирования (П→ПИ→ПИД).
Если
τзап/То>1,
то при использовании одноконтурной
системы регулирования ни один из
линейных законов регулирования не дает
удов качества регулирования. Тогда
необходимо использовать многоконтурные
системы регулирования.
Тогда
необходимо использовать многоконтурные
системы регулирования.
Чем отличается контроль и управление позициями отдела кадров?
В чем разница между контролем позиции и управлением позицией?
Поскольку организации ищут платформу управления человеческим капиталом (HCM), которая позволяет лучше планировать персонал, они часто ищут решение, основанное на программном обеспечении для бюджетирования должностей.
Во время поиска часто возникают вопросы о разнице между HCM, которые используют управление позициями, и HCM, которые используют архитектуру, разработанную для управления позициями. В этой статье мы дадим определение этим двум системам и рассмотрим три способа, которыми их различия влияют на организационную и административную эффективность, когда речь идет об управлении должностями и составлении бюджета, а также кадровом планировании.
Что такое управление положением?
Контроль должностей — это система отслеживания информации на основе должностей, а не сотрудников. Он создает структуру должностей для всех должностей, независимо от того, есть ли сотрудник на конкретной должности или нет. То есть вся соответствующая информация о должности, такая как диапазон заработной платы, квалификация или права на льготы, остается неизменной в системе, независимо от того, кто уже назначен на эту роль.
Он создает структуру должностей для всех должностей, независимо от того, есть ли сотрудник на конкретной должности или нет. То есть вся соответствующая информация о должности, такая как диапазон заработной платы, квалификация или права на льготы, остается неизменной в системе, независимо от того, кто уже назначен на эту роль.
Управление позиционированием обычно представляет собой дополнительный модуль HCM, который можно включать и выключать, и он не является основной частью системы. В некоторых HCM данные управления позициями хранятся независимо и не переносятся в финансы и расчет заработной платы, что может негативно сказаться на учете затрат, поскольку данные не будут перенесены в главную книгу без повторного ввода информации.
Что такое управление должностями?
Управление должностями — неотъемлемая часть решения HCM, которое позволяет организациям отделять людей от должностей для более эффективного планирования бизнеса и рабочей силы. Такой подход позволяет бизнесу получать точные исторические представления о талантах в режиме реального времени, а также более полное представление об общей организационной структуре. Поскольку данные интегрированы между кадровой и финансовой системами, это снижает административную нагрузку и повышает целостность данных, устраняя потери времени на ручной ввод данных, а также ошибки или пропуски данных.
Такой подход позволяет бизнесу получать точные исторические представления о талантах в режиме реального времени, а также более полное представление об общей организационной структуре. Поскольку данные интегрированы между кадровой и финансовой системами, это снижает административную нагрузку и повышает целостность данных, устраняя потери времени на ручной ввод данных, а также ошибки или пропуски данных.
Чем отличается управление рабочим местом от управления рабочим местом?
Существует множество способов, которыми управление позициями отличается от управления позициями; однако есть три отличия, которые явно влияют на административную эффективность, а также на управление должностями и составление бюджета.
Точные организационные схемы
Исторически организационные схемы не всегда считались необходимостью, когда компании приобретали HCM. Отчасти это связано с тем, что команды привыкли вручную обновлять документы, а также с тем, что методы управления положением не позволяют получить точную организационную структуру без чрезмерного дублирования усилий.
В устаревших HCM организационные диаграммы отображают текущее состояние организации на основе текущей даты. Эти HCM требуют, чтобы пользователи запускали отчеты и экспортировали данные в Excel и сторонние системы, чтобы собрать воедино прошлые и будущие взгляды на организацию. Этот подход отнимает много времени и создает возможности для человеческой ошибки, что снижает целостность данных.
Помимо опоры на текущую дату, устаревшие системы также отображают иерархию, основанную только на занятых позициях. Это нереальное требование; на любую дату у организации, вероятно, есть по крайней мере одна открытая вакансия, если не намного больше. Эта зависимость от заполненных должностей приводит к неточным представлениям об идеальной или запланированной организационной структуре.
Для сравнения, программное обеспечение для управления позициями не взрывается, когда человек покидает позицию, и не предоставляет данные только на текущую дату. Такие системы, как SyncHR, отображают полную организационную структуру, состоящую как из заполненных, так и из вакантных должностей. Организационная диаграмма SyncHR также имеет поле даты, которое позволяет администраторам выполнять прокрутку вперед и назад во времени, чтобы увидеть организационную структуру с течением времени. Это тип ценных данных, необходимых для оценки роста компании, изменений, развития и будущего планирования персонала.
Организационная диаграмма SyncHR также имеет поле даты, которое позволяет администраторам выполнять прокрутку вперед и назад во времени, чтобы увидеть организационную структуру с течением времени. Это тип ценных данных, необходимых для оценки роста компании, изменений, развития и будущего планирования персонала.
Видимость данных организации с течением времени
Одно из самых больших преимуществ управления положением по сравнению с контролем положения — это сила видимости данных с течением времени. Это помогает командам в области финансов, управления персоналом и отдельным бизнес-подразделениям избегать слепых зон и пробелов в важных показателях.
Чтобы увидеть, как это происходит, представьте себе такой сценарий: администратор HCM получает запрос на создание отчета для всех ролей, которые финансовый директор занимал в организации.
Большинство HCM могут создавать отчеты такого типа. Администратор запускает отчет, чтобы составить список (по именам) должностей, которые финансовый директор занимал в организации за последнее десятилетие. Поскольку титулы и должности финансового директора хранятся в его «личной» записи, данные истории этих должностей будут хорошо отображаться.
Поскольку титулы и должности финансового директора хранятся в его «личной» записи, данные истории этих должностей будут хорошо отображаться.
Но что, если запрос немного изменится? Что делать, если организации нужен отчет о всех, кто занимал должность финансового директора за последнее десятилетие, а также даты, когда эта должность была вакантной.
Системы, использующие управление рабочим местом, не могут легко получить эти данные, что затрудняет эффективное бюджетирование должностей и планирование численности персонала.
На самом деле, в этом случае администратору HCM необходимо знать имена людей, чтобы запросить даты трудоустройства. Тогда администратор должен был бы предположить, что невыполненные даты указывают на то, что должность вакантна. Конечно, администратор HCM не может знать эту информацию по всем должностям за все время. Вот где данные и метрики ломаются.
Для сравнения, видимость организационных данных во времени не является проблемой для HCM, построенного на управлении должностями. Администратор HCM просто составлял отчет о том, кто занимал должность финансового директора и когда эта должность была вакантной в течение последнего десятилетия.
Администратор HCM просто составлял отчет о том, кто занимал должность финансового директора и когда эта должность была вакантной в течение последнего десятилетия.
Эффективное администрирование адаптации
Основной потребностью организаций, приобретающих HCM, является желание сократить административные усилия, необходимые для адаптации новых сотрудников. Этот процесс отнимает не только время рекрутеров, но и бюджет организации. По оценкам Glassdoor, привлечение 50 новых сотрудников в год может стоить 12 500 долларов только за время работы рекрутеров — и это консервативная оценка.
«Ввод в должность требует большого количества документов — регистрация льгот, налоговые формы, справочники сотрудников, соглашения о неразглашении, арбитражные соглашения и так далее. Но вы, вероятно, не тратите достаточно на бумагу и чернила, чтобы значительно сократить свой бюджет. Реальный расход возникает из-за времени, необходимого для оформления документов и других административных аспектов адаптации», — отмечает Glassdoor.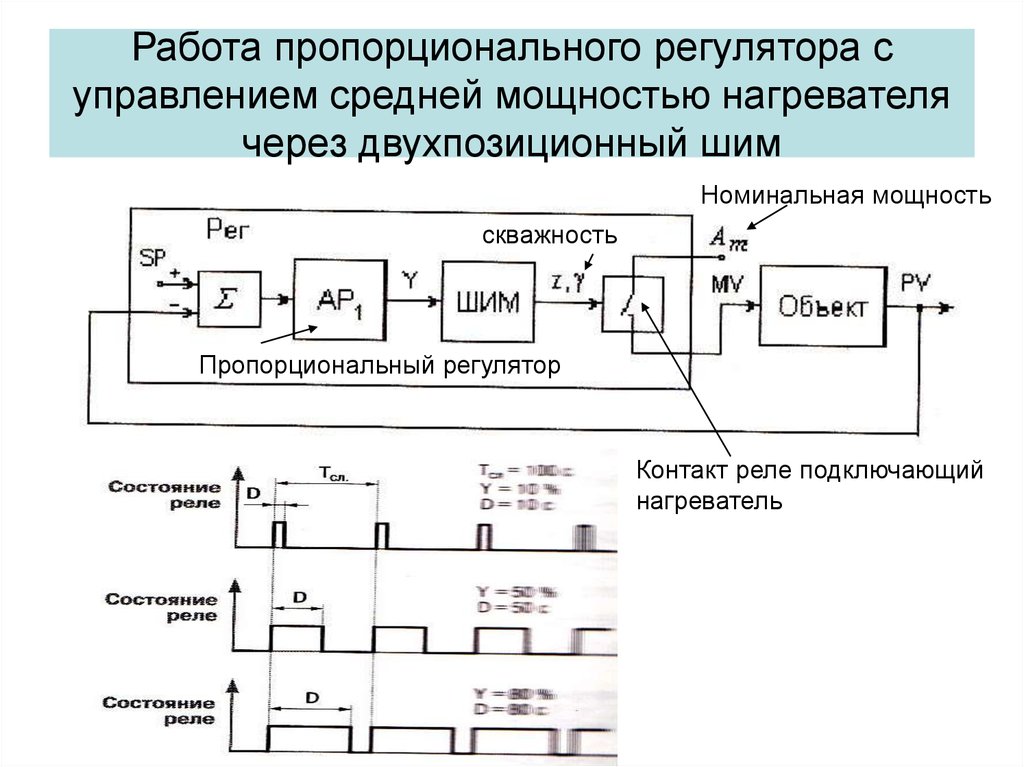
Большинство поставщиков HCM продают свои системы как инструмент, который помогает организациям удовлетворять административные потребности, связанные с адаптацией. Однако, если в системе HCM используются методы управления должностями, эта эффективность может быть ограничена, поскольку атрибуты занятости (руководитель, льготы, уровень оплаты) привязаны к записи о новом сотруднике. Это означает, что если человек уходит, все данные для этой должности теряются, и их необходимо вводить снова каждый раз, когда на эту должность назначается кто-то новый.
В рамках модели управления должностями все правила, атрибуты и конфигурации могут быть сохранены на уровне должности и автоматически назначены новым сотрудникам, которые замещают должность после того, как кто-то ушел.
Например, одной общей конфигурацией, приписываемой каждому новому сотруднику, является его руководитель, а также любые подчиненные ему сотрудники. В системе, использующей управление должностями, администратору придется вручную назначать руководителей и подчиненных для сотрудников при каждом новом найме.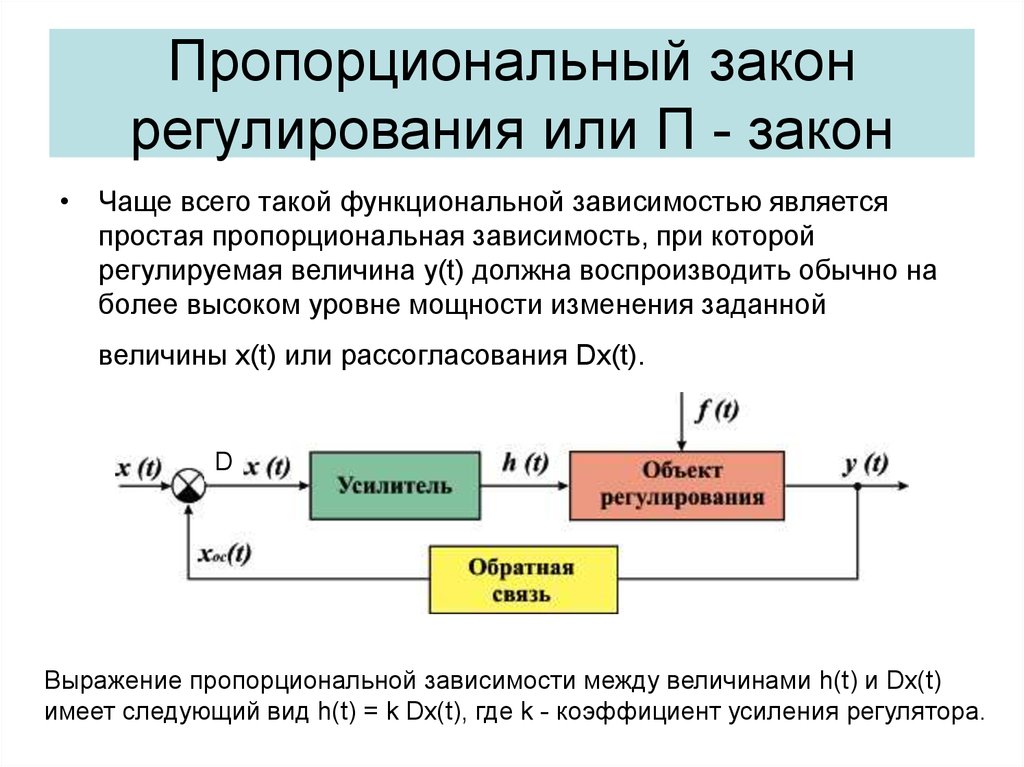 Такая неэффективность отнимает время администратора.
Такая неэффективность отнимает время администратора.
В отличие от этого, архитектура управления должностями, которую использует SyncHR, сохраняет эти назначения руководителя и прямых подчиненных в записи о должности, поэтому новые сотрудники просто автоматически наследуют настройки. Это оказывает значительное влияние на общее управление должностями и бюджетирование организации. Наши клиенты говорят нам, что эта функция помогает сократить административную нагрузку (и время, и деньги) на привлечение нового человека на целых 30–40%.
Поскольку организации рассматривают возможность приобретения программного обеспечения HCM в первый раз или обновления до новой платформы, важно учитывать различие между управлением должностями и контролем должностей. Для двух терминов, которые звучат одинаково, ясно, что влияния нет. Простота использования и мощь данных, реализуемых посредством управления должностями, — это определяющая функция, которая поднимет мощь вашего HCM — и способность вашей организации принимать обоснованные решения по управлению должностями и бюджетированию на основе данных — на новый уровень.
Свяжитесь с нами сегодня, чтобы узнать, почему ведущие отраслевые бренды доверяют инновационным решениям HCM от SyncHr, которые помогают им управлять повседневными организационными изменениями без головной боли.
Назад к ресурсам
Процедуры управления положением | Отдел кадров
Следующая информация должна помочь менеджерам понять процедуры контроля должностей RIT и подготовить материалы, необходимые для оценки работы, повторной оценки и различных изменений, связанных с должностью.
Назначение управления рабочим местом в RIT
Управление рабочим местом относится к системе отслеживания информации на основе должностей, а не сотрудников. Он создает структуру должностей для всех должностей в RIT, независимо от того, есть ли кто-то на конкретной должности или нет. Позиционный контроль распространяется на все штатные должности преподавателей и сотрудников.
В RIT мы используем управление положением:
Для отслеживания бюджета на основе сроков и/или источника финансирования
Для отслеживания FTE (количество сотрудников)
Для ведения данных, используемых для нормативной отчетности (IPEDS, AAP)
Определение должности
Каждая должность в RIT уникальна и состоит из 4 элементов (например, Учебный факультет.001234.01.00)
- Должность – обычно связана с должностными обязанностями
- Ассистент учебного факультета, директор, помощник заведующего, заведующий отделом
- Максимальное количество символов – 40
- Номер позиции — 6-значный номер, последовательно назначаемый отделом кадров .
- Версия позиции — 2-значный номер
- Увеличивается каждый раз при изменении названия должности, финансирования, организации или классификации должностей Oracle
- Финансирование позиции — двухзначный код
- Указывает основной источник финансирования
Виды финансирования должностей
Для всех штатных преподавателей и сотрудников, занятых полный или неполный рабочий день.
- OO — для должностей с постоянным бюджетом
- OE – Для должностей, указанных в договоре дарения
- OF — для должностей, не предусмотренных в постоянном бюджете и, как ожидается, сохранятся до тех пор, пока не закончится источник финансирования
- OG — Для должностей, указанных в соглашении о предоставлении гранта
- OT — Для краткосрочных заданий (1-2 года), когда работа имеет определенную продолжительность
- OU – для промежуточных или перекрывающихся позиций используются те же название и номер ПК, что и для соответствующей позиции OO .
- OP — Финансирование под руководством проректора
- IN — Для дополнительной численности персонала, используемой только в процессе утверждения
- IG — Для дополнительной численности персонала, финансируемой за счет гранта, используемой только в процессе утверждения
Процесс изменения должности
Требуемые утверждения и примеры изменений существующих должностей (открытых или заполненных)
Когда текущие уровни эквивалента полной занятости (FTE) и соответствующих бюджетных долларов изменяются, но не превышают текущие уровни.
1. Отдел представляет Описание работы (только для штатных должностей) менеджеру по персоналу
2. Кадр оценивает работу и определяет диапазон заработной платы персонала (только для штатных должностей)
3. Отдел создает заявку в Зоне карьеры и указывает, что изменения требуется для позиции
а) Требуется полное объяснение с подробным описанием всех изменений и экономическим обоснованием для изменения
ИЛИ
3. Отдел подает EAF – изменение назначения, работы или заработной платы со старой и новой информацией
a) Требуется полное объяснение с подробным экономическим обоснованием изменения
Требуемые утверждения и примеры для всех должностей дополнительного персонала
1. Отдел представляет описание работы (только для штатных должностей) менеджеру по персоналу
2. HR оценивает работу и определяет диапазон заработной платы персонала (только для штатных должностей)
3. Отдел отправляет форму запроса на должность (должности преподавателей и сотрудников)
4. Кадр уведомляет отдел о создании соответствующей должности
Кадр уведомляет отдел о создании соответствующей должности
5. Отдел создает заявку в разделе «Карьера»
Часто задаваемые вопросы часто задаваемые вопросы)
Как мне получить копию должностной инструкции для себя или для одного из моих непосредственных подчиненных?
Должностные инструкции доступны через Самообслуживание супервайзера. Все супервизоры имеют автоматический доступ к Oracle Supervisor Self-Service. Если вам нужна копия вашей собственной должностной инструкции, обратитесь к своему менеджеру по персоналу.
Как продлить дату окончания временно финансируемой должности?
Если у вас в настоящее время есть ОТКРЫТАЯ позиция с типом финансирования 0G, 0E, 0T, 0U и вы хотите запросить продление финансирования позиции еще на один год, отправьте электронное письмо по адресу [email protected]. Включите объяснение того, откуда будет поступать финансирование, и получите одобрение Бюджетного управления до отправки запроса.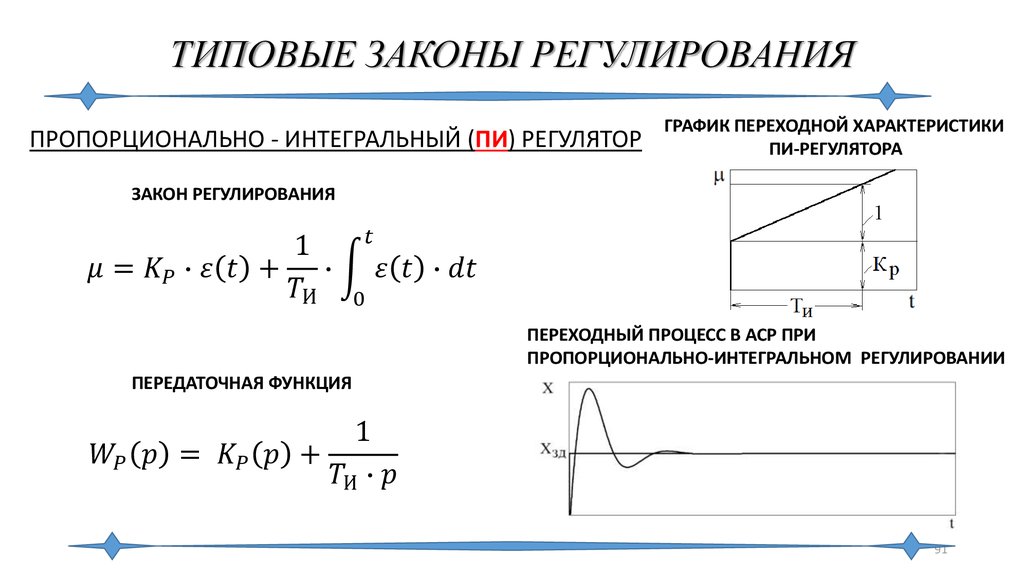
Чтобы запросить продление ЗАПОЛНЕННОЙ должности, заполните Форму действия по изменению назначения, работы или зарплаты сотрудника.
Как ликвидировать ОТКРЫТУЮ позицию?
Если у вас больше нет финансирования для должности, вы можете запросить ликвидацию вакантной должности. История, связанная с владельцами позиции, будет храниться в Oracle, но позиция больше не будет отображаться в отчетах об открытых позициях. Отправьте электронное письмо по адресу [email protected], чтобы сделать запрос.
Как изменить тип финансирования позиции?
Если вы хотите изменить тип финансирования для ОТКРЫТОЙ позиции, отправьте письмо по электронной почте [email protected]. Включите объяснение того, откуда будет поступать финансирование, и получите одобрение Бюджетного управления до отправки вашего запроса.
Чтобы изменить тип финансирования для ЗАПОЛНЕННОЙ должности, заполните форму действия по изменению назначения, работы или заработной платы.