плюсы и минусы, отличие от автоматической
Автопроизводители стремятся найти оптимальные технические решения во время проектирования различных узлов транспортного средства. В результате появляются конструкционные новинки. Примером служит эволюция трансмиссии. Сейчас можно наблюдать различные варианты коробок переключения передач, которые успешно конкурируют между собой. Существуют механические, автоматические, роботизированные КПП либо бесступенчатые вариаторы.
В статье выясним, что такое роботизированная коробка передач, какими достоинствами и недостатками она обладает по сравнению с другими типами трансмиссии. Ведь часто от степени комфорта управления автомобилем зависит не только наше настроение, но и безопасность на дороге.
Что такое коробка — автомат робот
Начнем с того, что робот — это по сути механика, у которой переключаются передачи и выжимается сцепление автоматикой. Если взять, к примеру, тойоту короллу на роботе, которая выпускалась с 2007 года, то у нее роботизированная коробка — это один в один механика, у которой убрали обычный рычаг КПП и сцепление и вместо них поставили специальные сервоприводы — актуаторы. Из этого следует, что ездовые качества авто будут во многом схожи с обычной механикой, только не придется самому переключать передачи.
Работа этих КПП заключается в том, чтобы принять от водителя информацию в цифровом виде, а затем, правильно и быстро обработав ее, перевести все в механические манипуляции с шестернями и валами. Для управления выбором передач вместо обычного рычага, который соединен тросами или тягами с коробкой используется рычаг — джойстик, который лишь указывает электронике нужную передачу. За логическую часть отвечает электронный блок управления (ЭБУ).

Внешний вид рычага управления роботом на тойоте королле
Учитывая отзывы пользователей, отметим, что этот тип автомобильных редукторов обладает большинством достоинств автоматической трансмиссии и сочетает экономность и надежность автомобильной «механики». Для покупателя робот обойдется дешевле, чем классический «автомат», а это значит, появляется дополнительный позитивный аргумент в их пользу.
Большинство популярных автоконцернов занимаются выпуском моделей различных ценовых сегментов с установленными на них роботизированными узлами трансмиссии. Даже в бюджетном сегменте Renault в 2016 году выпустил автомобиль с «роботом» на борту.
Как работает роботизированная коробка
За основу роботизированного блока переключения скоростей в большинстве автомобилей взята механическая КПП. При этом манипуляции с переключением между ступенями занимаются специальные конструкционные надстройки, которые называются сервоприводами. В некоторых источниках эти переключатели имеют название – актуары. Один из них занимается включением/выключением сцепления, а миссией второго является физическое перемещение шестеренок в коробке. Это значит, что их работа помогает избавиться в салоне автомобиля от педали сцепления.

Внешний вид актуатора сцепления робота
Не все конструкции приводов одинаковые. Инженеры создали две их разновидности. В первом случае работоспособность поддерживается с помощью электричества, а во втором случае за плавность и быстроту переключений отвечает гидравлика. Обычно отзывы не всегда однозначные, поэтому опишем оба варианта.
- Популярным устройством является электропривод. Данная конструкция отличается меньшей стоимостью и может ставиться даже на машины бюджетного класса. В основе управления заложен электромотор с редуктором и исполнительный механизм.
- В гидравлической системе переключение передач выполняется с помощью цилиндров, толкаемых силой электромагнитных клапанов. Принцип работы в этом случае схож с классическим «автоматом». Вторым названием таких устройств является «электрогидравлический привод». Конструкция дороже обычного электропривода, но это компенсируется быстротой переключения между передачами. Также водитель не ощущает возникновение каких-либо резких провалов. Блок ставится на более дорогие автомобили.
Управление всеми операциями возложено на встроенный компьютеризированный узел. Он проводит контроль за оборотами двигателя, текущей скоростью автомобиля, получает информацию от ABS, антизаносной системы и отдает команды на исполнительный механизм.
Устройство сцепления в роботе
Первые «роботы» в автомобилях устанавливались с одним сцеплением. Эксперимент получился неоднозначным. Выявилось достаточное количество недостатков такой конструкции. В результате разработок появились КПП с удвоенным сцеплением. Рассмотрим эти типы коробок и их работу.
Устройство робота с двумя сцеплениями
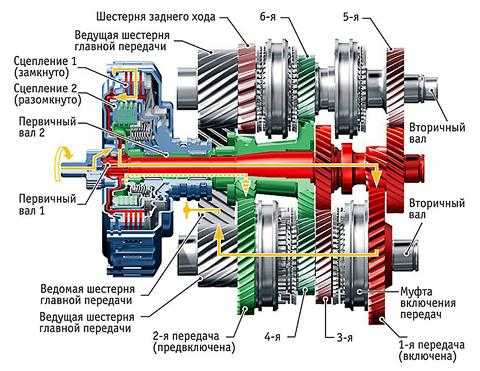
- Одно сцепление. Основой коробки переключения скоростей являются два вала: первичный и вторичный. На первичный (ведущий) вал подается вращение от двигателя. С мотором его разделяет сцепление. От вторичного (ведомого) вала посредством шестерен вращение передается на колеса. По команде электроники первый сервопривод разъединяет сцепление, а второй после разрыва занимается перемещением синхронизаторов так же, как это бы делал водитель рычагом на механической коробке. Однако, электроника «бережет» сцепление, и разрыв мощности часто становится заметен в салоне (эффект «кивания головой» пассажиров, когда временно пропадает тяга).
- Два сцепления. Снизить эффект от негативного воздействия провалов тяги конструкторы попытались с помощью двойного сцепления. В результате появились конструкции, получившие общее название DCT (Dual Clutch Transmission). Позже концерном Volkswagen были разработаны шестиступенчатые коробки DSG (Direkt Schalt Getrieb). Эта аббревиатура, являющаяся просто товарным знаком, стала синонимом всех коробок с двойным сцеплением, также как слово «ксерокс» вошло в обиход не торговой маркой, а бумажной копией. У DSG в конструкции есть два первичных вала, один из которых находится внутри другого. Оба вала имеют соединение с мотором с помощью индивидуальных сцеплений. «Умная» коробка, запуская автомобиль в движение, включает первую скорость, но одновременно на втором валу входит в зацепление шестерня для второй передачи. Второй вал ждет замыкания своего сцепления и одновременного размыкания с первой передачей. Это экономит время переключения и обеспечивает плавность перехода между ступенями. Есть второе название таких коробок – «преселективные» (предугадывающие выбор). Например, для автомобилей Гольф время переключения роботизированной коробки составляет лишь 8 миллисекунд.
Инженеры, усовершенствую конструкцию двойного сцепления, разработали две разновидности этого узла. В первом случае было решено оставить окружение сцепления воздушным («сухой» тип), а во втором случае в узел залили рабочую жидкость («мокрый» тип). У водителей, предпочитающих агрессивный стиль вождения и резкие, глубокие нажатия на педаль газа, сухое сцепление будет часто перегреваться, что приведет к быстрому выходу его из строя.
Для снижения негативного воздействия на фрикционы в блоке залито масло. Отрицательный эффект также появился за счет проскальзывания и небольшой потери мощности в это время, но узел стал выдерживать более суровые нагрузки. Это положительно сказалось на его долговечности.
Преселективные трансмиссии в своем арсенале имеет большинство ведущих автоконцернов, среди которых Fiat, BMW, Ford, Mitsubishi. Показателем перспективности является то, что даже в Porsche признали уместность данной конструкции, ведь компания берет на вооружение только проверенные и перспективные модели. Разработки в этом направлении продолжаются.
Плюсы и минусы роботизированной коробки передач
К преимуществам относятся:
- Конструкция узлов скомпонована на основании проверенных временем механических коробок передач. За счет этого повышается общая надежность агрегата, которая выше, чем у вариаторов.
- Занимаемый объем в подкапотном пространстве существенно меньше, чем у классических «автоматов», соответственно расход на масло во время эксплуатации для данной коробки будет ниже, чем у аналогов.
- Работоспособность сцепления, особенно мокрого типа, у «роботов» на 25-30% выше.
- Также отличие роботизированной коробки передач от автоматической заключается в стоимости производства и ремонта этого агрегата, говорящее в пользу «роботов», а не «автоматов» и вариаторов.
- Большинство современных коробок с роботизированным управлением имеет возможность переключать ступени в ручном режиме, что схоже с Типтроником на автоматических КПП.
- Масса коробки-робота значительно меньше АКПП. Это дает преимущества при установках на малогабаритные авто, где масса даже в несколько десятков килограмм играет существенную роль.
- Расход топлива на автомобилях, агрегатированных «роботами», сопоставим с расходом на механических КПП и меньше, чем у остальных конструкций при прочих равных условиях.
К недостаткам относятся:
- Есть конструкции с роботизированными коробками, у которых задержка между переключениями передач достигает двух секунд. Это относится к электрическим переключателям. При такой езде теряется динамика и может возникать дискомфорт для водителя.
- Использование гидроприводов для ускорения переключений повышает скорость между включением ступени до 0,05 с. Однако, эта конструкция значительно удорожает весь узел. Тормозную жидкость, используемую в качестве рабочей жидкости, необходимо постоянно удерживать под высоким давлением, что отнимает часть мощности у двигателя. Гидравлика становится эффективной больше у мощных автомобилей или машин премиального класса.
- Более дешевые модели не обеспечивают адаптивной подстройки автоматики под стиль вождения владельца автомобиля.
- Преселективные модели пока еще достаточно дорогие в ремонте. Хотя механическая часть весьма надежна как и у простой механики, при недоработанных прошивках ЭБУ и неидеальной конструкции сцеплений часто случается преждевременный износ последних. А все «навесное» оборудование робота (сцепления, ЭБУ, актуаторы) стоит приличных денег. Поэтому при покупке авто с пробегом стоит проверять робот с особой тщательностью и узнать сроки последнего его обслуживания, посмотреть чеки на выполненные работы.
Но все же большинство положительных факторов достаточно легко перекрывают все негативные моменты. Поэтому для того чтобы насладиться всеми «плюсами» роботов, необходимо выбирать новые варианты конструкций, в которых основные недостатки минимизированы или полностью устранены.
Заключение
Процесс окончательного усовершенствования роботизированных коробок еще не наступил. Инженеры стремятся сделать конструкцию более надежной и быстрой, и по некоторым показателям это им удается. При этом авто с «роботами» находят своих поклонников уже сейчас.
Интересное по теме:
загрузка…
Вконтакте
Одноклассники
Google+
ktonaavto.ru
Принцип работы | ROBOMATIC Промышленные роботы и автоматизация производства
В стандартной конфигурации промышленного робота обязательно присутствуют механическая часть (рука) и система управления этой механической частью (контроллер), которая в свою очередь получает сигналы от сенсорной части. Механическая часть робота делится на манипуляционную систему с захватным устройством или технологическим инструментом (запястье) и систему перемещения (плечо и суставы руки).
Манипулятор включает в себя подвижные звенья двух типов:
- звенья, обеспечивающие поступательные движения
- звенья, обеспечивающие вращательные перемещения
Сочетание и взаимное расположение звеньев определяет степень подвижности, а также область действия манипуляционной системы робота.
Для обеспечения движения в звеньях могут использоваться электрические, гидравлические или пневматические приводы.
Частью манипуляторов (хотя и необязательной) являются захватные устройства. Наиболее универсальные захватные устройства аналогичны руке человека — захват осуществляется при помощи механических «пальцев». Для захвата плоских предметов используются захватные устройства с пневматическими присосками. Для захвата же множества однотипных деталей (что обычно и происходит при применении роботов в промышленности) применяют специализированные конструкции с множеством захватных приспособлений.
Вместо захватных устройств манипулятор может быть оснащен рабочим инструментом. Это может быть сварочная горелка или клещи, лазерная головка, пульверизатор и т. д.
Система управления манипулятором, как правило, включает в себя несколько уровней:
- Программное управление — управление роботом осуществляется при помощи предварительно написанной управляющей программы, аналогично станкам с ЧПУ.
- Адаптивное управление — роботы с адаптивной системой управления оснащены сенсорной частью. Сигналы, передаваемые датчиками, анализируются, и в зависимости от результатов измерений принимается решение о дальнейших действиях.
- Управление, основанное на методах искусственного интеллекта – может включать в себя алгоритмы технического зрения, алгоритмы поиска и т.п.
- Управление человеком (например, дистанционное управление при помощи специального пульта).
Современные роботы функционируют на основе принципов обратной связи, подчинённого управления и иерархичности системы управления роботом. Иерархия системы управления роботом подразумевает деление системы управления на горизонтальные слои, управляющие общим поведением робота, расчётом необходимой траектории движения манипулятора, поведением отдельных его приводов, и слои, непосредственно осуществляющие управление двигателями приводов.
Современный робот оснащён не только обратными связями по положению, скорости и ускорениям звеньев. При захвате деталей робот должен знать, удачно ли он захватил деталь. Если деталь хрупкая или её поверхность имеет высокую степень чистоты, строятся сложные системы с обратной связью по усилию, позволяющие роботу схватывать деталь, не повреждая её поверхность и не разрушая её.
В процессе работы робот также может взаимодействовать и обмениваться сигналами с другим оборудованием и средствами автоматизации: сенсорными системами, системами технического зрения, программируемыми контроллерами, транспортными системами, оборудованием для сварки и резки и др.
robomatic.ru
как правильно пользоваться роботизированной КПП, ее плюсы и минусы с фото и видео
Современные автомобили оборудуются новыми типами трансмиссий, среди которых роботизированная КПП. Чтобы разобраться в основных моментах, связанных с ее эксплуатацией, нужно понимать, что такое коробка передач робот.
Содержание
[ Раскрыть]
[ Скрыть]
Что собой представляет роботизированная коробка передач?
Роботизированная коробка на автомобиле означает нечто среднее между МКПП и автоматической трансмиссией. Фактически роботизированная КПП представляет собой «механику», оборудованную автоматическим сцеплением и возможностью переключения скоростей. Работа этого типа агрегата зависит не от водителя, а от функционирования управляющего электронного модуля. Во время движения водитель должен только правильно передавать входящие данные для обеспечения правильной работы КПП.
Перед покупкой авто с таким агрегатом рекомендуется разобраться с основными характеристиками и принципом действия устройства.
Устройство роботизированной КПП
 Схематическое устройство конструктивных компонентов РКПП
Схематическое устройство конструктивных компонентов РКППЧтобы понять, что такое коробка передач робот, надо разобраться в устройстве агрегата. Дополнительные элементы, предназначенные для выжима сцепления, а также переключения и выбора скоростей, называются актуаторами.
Роботизированная трансмиссия оснащается собственной управляющей системой, выполненной в виде блока управления, а также нескольких контроллеров. Эти датчики предназначены для взаимодействия с блоком. Роботизированная КПП принципиально отличается от традиционной автоматической коробки и вариаторных трансмиссий.
Коробки передач робот, как и механические, оснащаются сцеплением. В таких типах агрегатов не применяются трансмиссионные масла ATF.
В зависимости от производителя автомобиля, роботизированная трансмиссия может оснащаться одним либо двумя сцеплениями:
- если сцепление одно, то это однодисковый агрегат;
- если два, то трансмиссия считается преселективной.
Основные компоненты устройства роботизированного агрегата:
- Сама КПП.
- Актуаторы или сервоприводы. Предназначены для выжима сцепления и активации скоростей.
- Управляющий модуль, являющийся микропроцессорным блоком. Используется для обработки и передачи команд.
- Внешние контроллеры. Количество датчиков может отличаться в зависимости от производителя машины.
КПП
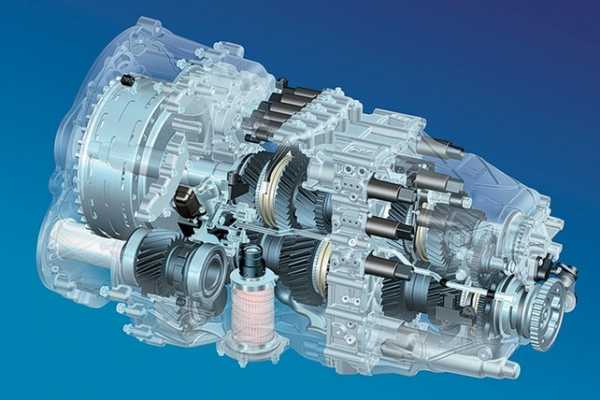
Подробнее с устройством роботизированного агрегата рекомендуем разобраться на примере шестиступенчатой коробки, оснащенной двумя сцеплениями. Агрегат выполнен в виде механической КПП, но оборудуется двумя ведущими шкивами. Один из этих элементов устанавливается внутри другого. Внешний шкив обладает внутренней полостью, в которую устанавливается внутренний компонент. На внешнем шкиве располагаются шестеренки привода второй, четвертой и шестой скоростей, а на внутреннем – шестерни первой, третьей, пятой и задней передачи.
Каждый вал роботизированной коробки передач оборудуется отдельным сцеплением.
Актуаторы или сервоприводы
Актуаторные устройства могут быть электрическими либо гидравлическими. Электрический тип элементов выполнен в виде электрического моторчика с редукторным устройством, а гидравлический считается гидроцилиндром. Шток последнего связывается с синхронизаторным устройством. Основное предназначение актуаторных элементов заключается в механическом перемещении синхронизаторных составляющих, а также активации и деактивации сцепления.
Управляющий модуль
Управляющий модуль – микропроцессорный блок, на который установлены внешние контроллеры. Эти датчики задействованы в электронной системе управления мотором машины. Датчик трансмиссии взаимодействует с контроллерами от силового агрегата и прочих систем, к примеру, ABS. Управляющий модуль может быть совмещен с микропроцессорным блоком управления ДВС, но трансмиссия будет функционировать по своему алгоритму.
Канал Carvizor подробно рассказал об устройстве и конструктивных особенностях РКПП.
Особенности роботизированной КПП
Электрический привод сцепления функционирует за счет электромотора, а также механической скорости. Работа гидравлического привода основана на специальных цилиндрических устройствах, управление которыми осуществляется посредством электромагнитного клапана. Иногда роботизированный агрегат может быть дополнен электромотором, использующимся для перемещения цилиндрических элементов и рассчитанного на поддержку функционирования гидромеханического модуля. Это устройство, оснащенное приводом, характеризуется долгим переключением скорости, которая может составить до половины секунды.
Если сравнить с гидравлическим устройством, то для работы агрегата не требуется постоянная поддержка нужного уровня давления. В некоторых моделях Опель гидравлические агрегаты характеризуются быстрым циклом переключения скорости, обеспечивающего переключение за 0,06 сек. Но такие роботы обычно устанавливаются на спорткары.
Принцип работы коробки передач робот
 Схема функционирования роботизированного агрегата
Схема функционирования роботизированного агрегатаРоботизированный агрегат работает наподобие механики – для начала езды и переключения скоростей водителю надо выжимать педаль сцепление. Процедура активации этого механизма выполняется посредством актуаторного устройства, получающего импульс от управляющего модуля. После подачи сигнала узел медленно вращает редукторный узел.
Если трансмиссия оборудована двумя сцеплениями, то изначально производится активация первого. После этого актуаторное устройство выбора и активации скорости подводит синхронизаторный узел к шестеренке первой скорости. Это приводит к ее блокировке на валу и началу вращения вторичного шкива. Когда машина тронулась с места, водитель жмет на газ. Если трансмиссия однодисковая, активация следующей скорости произойдет через определенный временной промежуток. В итоге появляется так называемый провал во времени.
Для предотвращения появления временной задержки и снижения время переключения передач агрегат оборудуется вторым сцеплением и другим валом. Это привело к созданию преселективной коробки. Во время включения первой скорости вторая готова к активации, поскольку второе сцепление уже задействовано. Когда на агрегат поступает сигнал от управляющего модуля, происходит быстрое переключение с первой скорости на вторую.
Аналогично выполняется последующее переключение на более высокие и низкие скорости во время движения. Временной интервал при переключении минимальный. Любые перегазовки исключаются, также нет провала тяги двигателя и других нюансов. В результате автомобиль едет динамично, а экономия потребления горючего максимальная. Функционирование в режиме автомата достигается благодаря регулярному анализу микропроцессорного модуля импульсов, подающихся с внешних контроллеров.
При получении сигналов и их отправке микропроцессор учитывает:
- величину нагрузки на силовой агрегат;
- скорость езды;
- положение, в котором находится педаль газа.
Роботизированные коробки обладают возможностью ручного переключения скоростей, эту особенность можно назвать имитацией гидромеханического автомата. Некоторые типы агрегатов позволяют выполнить блокировку при активации повышенной скорости.
 Блок-схема функционирования роботизированной системы I-Shift на автомобилях Хонда
Блок-схема функционирования роботизированной системы I-Shift на автомобилях ХондаРежимы работы
Микропроцессорный модуль может функционировать в нескольких режимах:
- Спорт. Обычно его активация производится при движении на трассе, когда автомобиль стабильно едет на повышенной скорости.
- Городской режим. Активируется при движении по городу либо стоянии в пробке.
- Эконом. Позволяет максимально сэкономить топливо. Но скорость езды будет минимальной.
Как научится ездить на роботизированной коробке передач? Основные особенности управления
Чтобы не допустить появления неисправностей в работе трансмиссии, надо знать, как пользоваться роботом, а именно:
- как выполнять прогрев агрегата;
- как правильно начинать движения;
- как пользоваться трансмиссией при эксплуатации авто в режиме города.
Прогрев роботизированной коробки переключения передач и особенности эксплуатации
Многие производители авто утверждают, что роботизированные агрегаты не нуждаются в прогреве. Но в этом вопросе надо учитывать температуру рабочей жидкости в смазочной системе, а также как масло ведет себя в условиях мороза. Некоторые типы расходных материалов при низких температурах загустевают и собираются в нижней части агрегата. По стандарту процесс прогрева состоит в запуске двигателя и выжидании 2-3 минут. При прогреве автомобиля не нужно трогать рычаг КПП.
Если автомобиль находится в гараже, то выгонять его нужно спокойно и плавно, чтобы не допустить толчков и рывков. При прогреве надо следить за количеством оборотов, их число в идеале будет минимальным и составит около 1 тысячи в минуту. Выполнять прогрев агрегата следует и летом, благодаря этому все составляющие компоненты робота будут качественно смазаны. Выполнение прогрева позволит не допустить быстрого износа и стирания компонентов агрегата.
Основные особенности эксплуатации, которые позволят увеличить ресурс работы агрегата в целом:
- Нельзя допустить буксования при езде в мороз. Это приведет к быстрому износу исполнительных механизмов и узлов. Регулярное буксование станет причиной разкалибровки агрегата.
- Специалисты не советуют часто ездить по сильно заснеженным поверхностям. Транспортное средство может застрять, что в итоге станет причиной пробуксовок.
- В качестве зимней резины рекомендуется использовать изделия, оснащенные шипами. При установке на колеса обычных шин есть вероятность пробуксови на гололеде.
- При длительных простоях, составляющих несколько дней и более, селектор коробки передач рекомендуется устанавливать в положение Е. Мотор должен быть заглушен.
- Если состояние дороги плаченое, специалисты советуют начинать движение со второй скорости, но при этом сильно не газовать.
Об основных принципах управления роботизированной КПП на примере Лады Гранты рассказал Алексей Рыков.
Правила правильного старта на коробке робот
Владельцам машин, оборудованных роботизированными КПП, надо учитывать, что некоторые транспортные средства не имеют дополнительной опции помощи при старте. В частности, речь идет о начале движения на возвышенности, в гору. Поэтому важно правильно научиться трогаться с места. Процедура троганья выполняется так же, как на машине с механическим агрегатом.
Более подробно о начале езды:
- Рычаг стояночного тормоза должен быть поднят.
- Рычаг коробки передач устанавливается в режим А.
- Водитель легко, без усилий жмет на газ.
- Одновременно с этим отключается рычаг стояночного тормоза.
Если при начале езды на улице минусовая температура и высокая влажность, селектор коробки можно перевести в положение М1. Сила воздействия на педаль газа должна быть допустимой, чтобы не произошла перебуксовка. Если машина оборудована гироскопом, то при выборе автоматического режима микропроцессор агрегата сам выберет необходимую скорость и будет выполнять переключение. Это позволит переключаться скоростям на понижение. Если водитель опытный, то с учетом ситуации он может установить режим М при фиксации установленной передачи.
Если изначально устанавливается скоростной режим, то скорость передвижения не рекомендуется менять. Количество оборотов двигателя должно составить от 2500 до 5000 в минуту, но не за пределами этого диапазона. При начале езды на спуске селектор трансмиссии устанавливается в режим А и отключается рычаг ручного тормоза.
Эксплуатация роботизированной коробки передач в городских условиях
Регулярная эксплуатация автомобиля в режиме города и пробок может привести к быстрому износу компонентов трансмиссии. Для предотвращения этого при остановке машины следует переводить рычаг коробки передач в режим N. Затем производится активация стояночного тормоза и остановка мотора. Если остановки кратковременные, к примеру, в условиях пробок, то режим нейтрали можно не включать, достаточно остановиться, когда рычаг установлен в режим А. Если автомобиль простоит в пробке больше одной минуты, то двигатель надо будет остановить.
О тонкостях использования машин с установленным роботом рассказал Василий Костин.
Преимущества
Плюсы роботизированных агрегатов:
- Надежность конструкции агрегата в целом. В основе устройства лежит механическая составляющая, которая прошла многочисленные испытания и изучена специалистами. Благодаря этому по надежности данный тип КПП лучше, чем обычные автоматы и вариаторы.
- Эксплуатация автомобиля с установленным роботизированным агрегатом позволяет сэкономить горючее. Если коробка и двигатель машины не изношены, то экономия горючего может быть до 30%.
- Для заправки в роботизированный агрегат требуется меньше смазочной жидкости, в среднем это не более трех литров. Для сравнения – в вариаторные коробки заливается около семи литров. Такое преимущество позволяет сэкономить финансовые средства.
- Количество передач в роботах соответствует числу скоростей на механике.
- Благодаря тому, что основу КПП составляет механическая часть, это позволяет выполнить простой ремонт. Навыками подобного ремонта владеют многие специалисты, чего не скажешь о вариаторных агрегатах. Большинство распространенных неисправностей можно решить самостоятельно при правильном подходе.
- Срок службы системы сцепления больше, чем на механических КПП, примерно на 40%. Речь идет не только об экономии финансовых средств, но и о безопасности.
- При эксплуатации авто в городских условиях начать движение без нагрузки на агрегат позволяет функция переключения скоростей в ручном режиме.
Недостатки
Роботизированные КПП имеют не только плюсы, но и минусы, они приведены в соответствии с отзывами владельцем машин с РКПП:
- Основной минус в РКПП заключается в проблемах при программировании трансмиссии. Автовладельцу может быть затруднительно перепрограммировать программное обеспечение, чтобы повысить динамику машины и сэкономить ресурсы агрегата. Поэтому возникают сложности с настройкой трансмиссии под определенный стиль езды. Водителю потребуется время, чтобы привыкнуть к манере функционирования авто для удобной эксплуатации.
- Низкая скорость активации скоростей и замедленная реакция агрегата. Это обусловлено издержками в программировании устройства. Данная проблема характерна и для многих автоматических КПП.
- При езде в условиях города и пробок, а также по неровным дорогам водителю следует переходить на ручной режим управления. В противном случае элементы системы сцепления изнашиваются быстрее. Это отражается и на ресурсе эксплуатации агрегата в целом.
- Во время переключения скоростей ощущаются рывки и толчки. Не на всех агрегатах, но на многих. Это связано с тем, что газ не сбрасывается перед тем, как произойдет переключение скорости. Для ликвидации данной проблемы можно не выжимать полностью педаль газа.
- При движении в гору может разомкнуться сцепление. Проблема связана с перегревом трансмиссионного агрегата. Если автомобиль движется на подъем, рекомендуется переходить на ручное управление.
Решить проблему с перепрограммированием можно путем замены прошивки микропроцессора, но это надо делать, когда закончится срок гарантийного обслуживания.
Каналом HPC представлен реальный негативный отзыв потребителя о работе роботизированного узла на авто.
Отличие роботизированной коробки передач от автоматической
Основные отличия роботизированных трансмиссий от автоматических агрегатов:
- Конструктивные особенности. Робот представляет собой механический агрегат, оборудованный управляющим микропроцессорным устройством. Автоматические КПП имеют свое устройство. В него также входит электронный модуль, но механической составляющей в автоматах нет.
- Автоматические трансмиссии выигрывают у роботизированных агрегатов в плане быстроты переключения скоростей. Также на автоматах процедура переключения выполняется более плавно.
- Роботизированные устройства обладают опцией ручного переключения. На автоматических агрегатах возможности ручного управления нет.
- Автомобили, оборудованные роботизированным агрегатом, потребляют меньше горючего. Для их заправки требуется меньше смазочной жидкости.
- Процедура ремонта и обслуживания коробок передач робот обойдется потребителю дешевле, нежели АКПП.
Актуальность коробки робот в России
Российские производители автомобилей почти не устанавливают роботизированные агрегаты на свои продукты. В 2015 году руководство автоконцерна ВАЗ заявило, что модели машин Лада Приора будут оснащаться роботизированными КПП. Общий вес устройства составляет примерно 35 кг. Сам агрегат адаптирован под отечественные дороги, а также погодные условия, характерные для климата России.
К примеру, автоматы могут отказать в запуске мотора авто, если температура упадет ниже -25 градусов. Роботизированные агрегаты смогут эффективно функционировать и заводить ДВС при -40 градусах. Производитель АвтоВАЗ дает гарантию на три года на КПП, но утверждает, что в среднем срок службы устройства составит около десяти лет. Такой шаг был сделан представительством концерна для увеличения продаж автомобилей Лада Приора.
Сегодня из отечественных автомобилей роботизированные КПП устанавливаются только на Лады Гранты и Приоры.
Официальный канал Лада представил сюжетный ролик о производстве роботизированных агрегатов для автомобилей Лада Гранта.
Советы по выбору роботизированной коробки передач
Перед покупкой транспортного средства с РКПП надо собрать максимум информации о функционировании конкретного типа трансмиссии. Рекомендуется изучить отзывы потребителей, поскольку отдельные варианты роботов обладают «глюками», характерными для всей линейки. В частности, надо узнать о временном интервале при переключении передач. Лучше отдать предпочтение вариантам, в которых процедура переключения выполняется максимально быстро.
Выбирая авто, надо учесть и параметр индивидуальности устройства. Одинаковые трансмиссии могут различаться между собой. Проблемы, связанные с работой агрегата, часто можно удалить посредством перепрошивки микропроцессорного блока.
Основные неисправности в работе роботов
Симптомы, которые могут сообщить о неполадках в работе устройства:
- На контрольном щитке появился сигнализационный индикатор. Это может быть лампочка Чек Энджин или специальный символ, сообщающий о проблемах в работе коробки передач.
- При езде водитель слышит посторонние звуки. О неполадках в работе трансмиссии могут сообщить нехарактерный вой или жужжание.
- Отсутствует реакция при нажатии на газ. Обороты двигателя не увеличиваются либо увеличиваются, а скорость движения не растет.
- Появление масляной лужи под автомобилем. Это свидетельствует об утечке расходной жидкости из агрегата.
- Происходит буксовка системы сцепления.
- Когда водитель жмет на газ и делает это плавно либо при переключении скоростей, появляется толчок или рывок.
- Трансмиссионный узел сам по себе прекращает функционировать, автомобиль останавливается и не двигается.
Большая часть неполадок обусловлена некорректной работой микропроцессорного устройства. Если говорить о механических проблемах, то большая часть из них связана с износом составляющих элементов. Такие детали обычно ремонту не подлежат и меняются.
Механические неполадки:
- износ вилки, предназначенной для выбора скорости;
- подшипниковые устройства качения изнашиваются, из-за этого может наблюдаться гул.
Фотогалерея
Фото роботов от разных автопроизводителей приведены в этом разделе.
Видео «Как не допустить быстрого выхода из строя роботизированной КПП»
Пользователь JoRick Revazov рассказал о вещах, которые нельзя делать с роботизированным узлом на автомобиле.
Загрузка …avtozam.com
Принцип работы коробки робот
Скорее всего, что третья педаль в легковых автомобилях скоро станет экзотикой. С таким темпом развития трансмиссионной автоматики, скоро нечем будет тренировать левую ногу, а автомобили с ручной механической коробкой передач станут анахронизмом. Или все же не до конца еще автоматические системы заменили человека в управлении трансмиссией? На примере роботизированной коробки передач постараемся выяснить, какие перспективы у автоматических трансмиссий.
Содержание:
- Коробка передач робот, что это такое
- Плюсы и минусы роботизированной КПП
- Виды приводов и как ими пользоваться
- Коробка DSG, прощай, педаль сцепления
Коробка передач робот, что это такое

Коробка-робот, роботизированная коробка передач, появилась немного позже гидромеханического автомата, но стала активно использоваться только сейчас. Робот представляет собой обычную механическую коробку передач, правда, переключением их и выключением сцепления занимается исключительно автоматика.
Если разобраться в логике переключения передач, то станет понятен принцип работы коробки робот. Водитель, управляющий автомобилем с механической трансмиссией, самостоятельно решает когда и какую передачу лучше включить, ориентируясь на условия передвижения и состояние дорожного покрытия. То есть человек формирует вводные данные для коробки передач и сам их исполняет. КПП остается просто проделать механическую работу по перемещению втулок и шестерней на валах коробки.

Плюсы и минусы роботизированной КПП
Преимущества роботизированной КПП в том, что она может умело сочетать конструктивную простоту механической коробки и удобство использования гидромеханического автомата. Но и это не все. Как правило, роботизированная КПП значительно дешевле автоматической коробки с классической конструкцией. Именно поэтому роботы стали появляться не только в автомобилях премиум-сегмента, но даже в бюджетных дешевых автомобилях.

Из представленных на рынке роботизированных трансмиссий существует несколько разновидностей, непринципиально отличающихся друг от друга. Общее у них одно — автоматическое управление сцеплением и автоматизированное переключение передач. В паре со всеми роботами производители применяют так называемое двойное сцепление.
Это по сути обычное фрикционное сцепление, но двойное. Применение такой конструкции позволяет передавать крутящий момент на ведущие колеса без разрыва потока мощности, что очень важно, если ставить во главу угла динамические показатели автомобиля. Сцепление может быть сухим, по аналогии с обычным сцеплением, или мокрым, работающим в масляной ванне. Такое сцепление применяется в основном в роботизированных трансмиссиях DSG концерном Фольксваген.
Виды приводов и как ими пользоваться
Мы добрались до самой сути конструкции роботизированной трансмиссии, а именно, системы привода сцепления и механизма переключения передач. Систем может быть пока только две:
- Гидравлический привод. Он работает при помощи гидроцилиндров с электрическим управлением. Это значит, что для корректной работы системы привода необходимо постоянно поддерживать давление в гидравлической системе, а это, естественно, потеря энергии на привод дополнительного насоса. Однако скорость срабатывания гидравлических роботов просто потрясающая. На некоторых моделях спортивных автомобилей скорость срабатывания может достигать 0,06 секунды.
- Электрический привод. Этот тип привода более медлительный, но более простой и самый недорогой. Именно поэтому его применяют чаще всего в недорогих машинах. Работает электропривод при помощи сервомеханизмов, а это определяет невысокую скорость переключения передач, но зато потребление энергии ДВС у такого привода гораздо меньше.

Единственной проблемой роботизированной трансмиссии до появления двойного сцепления считалась неинформативность сцепления. Когда человек самостоятельно управляет сцеплением, он чувствует момент смыкания дисков и может контролировать процесс так, чтобы переключение прошло плавно и мягко. Также при переключении на скорости могли присутствовать провалы.
Коробка DSG, прощай, педаль сцепления
С появлением немецкого робота DSG в 80-х годах ХХ века, эти проблемы начали потихоньку рассасываться. Основная идея этой коробки в том, что переключение происходит без разрыва потока мощности и с очень высокой скоростью. Принцип действия этой схемы прост, как первое колесо. Для устранения провалов при переключении достаточно было применить два сцепления.
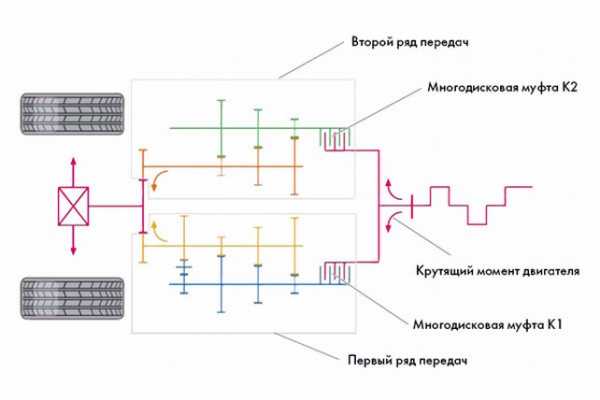
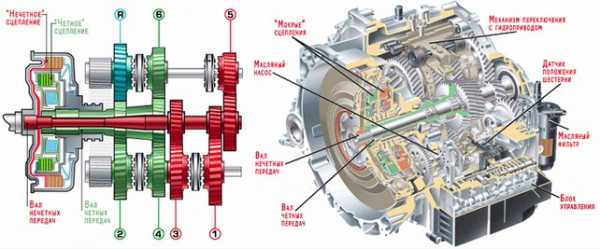
Условно КПП делится на две группы передач — четную и нечетную. Когда включается первая передача и начинается движение, шестерни второй передачи уже вошли в зацепление и ждут, пока электроника или человек подадут сигнал на переключение. Поскольку у каждой группы передач есть свое сцепление, то перебросить крутящий момент с одного фрикционного диска на другой в сто раз проще, чем в реальном времени переключать шестерни.

Поскольку шестерни уже введены в зацепление, то по команде ЭБУ или водителя, сцепление моментально отключает первую передачу и включает вторую, в тем временем, третья передача уже входит в зацепление и ждет момента, пока сцепление не перебросит момент на следующую, уже заранее заготовленную, передачу.
Следовательно разница между роботом и автоматом — радикальная. Робот — это та же механика, но с автоматизированным включением сцепления и переключением передач, а автомат работает при помощи гидромеханической муфты. Но по цене АКПП пока что выше роботизированных трансмиссий, поэтому в ближайшем будущем есть все перспективы забыть как выглядит педаль сцепления. Плавных всем переключений и ровных дорог!
Читайте также Принцип работы механической коробки передач
Читайте также:
avtoshef.com
Промышленные роботы. Виды и устройство. Работа и применение
Промышленные роботы все чаще применяются на заводах и предприятиях. Их используют для осуществления функций управления, перемещения и движения в различных производственных процессах. Главная их особенность в том, что они не устают. Роботы могут работать круглосуточно без какого-либо участия человека, ведь для их функционирования нужна только заложенная программа, по которой они будут действовать. Они могут выполнять только определенные действия, но чаще всего их используют в автоматизированных производственных системах.
Благодаря использованию роботов удается создать полный цикл производства, который обеспечивает производительность и точность на весьма высоком уровне. Кроме того, практически полностью исключаются ошибки в производстве, которые так свойственны людям. Промышленная робототехника заявила о себе в 1961 году. Именно тогда был получен первый патент на робота. Однако первое серийное производство роботов началось в далеком в 1956 году. Основное развитие роботы для промышленности получили в 60-70-ых годах двадцатого века. Именно в этот период был создан прототип современного робота, который напоминал человеческую руку и имел шесть степеней свободы.
Виды
На текущий момент промышленные роботы условно можно поделить на три категории, в которых также можно выделить свои подвиды:
- Автоматические устройства. В эту категорию входят программные, адаптивные и биотехнические роботы:
— Программные представляют самую простейшую разновидность роботов, которые управляются автоматически. Эта разновидность широко применяется вследствие их не дороговизны. Они находят широкое применение на предприятиях для совершения простых операций по запланированной технологии. В большей части случаев у таких устройств нет сенсоров. При этом все действия производятся по циклической программе, которая заранее закладывается в блок памяти.
— Адаптивные. В отличие от первой разновидности такие роботы имеют сенсоры, а также ряд сопутствующих программ. Благодаря сигналам, которые идут к управляющей системе от всевозможных датчиков, происходит анализ окружающей обстановки. В результате полученных данных, робот может принимать решение, как ему действовать дальше. К примеру, он может начать выполнять другую операцию, если невозможно выполнить первую.
— Обучаемые. Подобные роботы способны учиться, то есть они выполняют действия согласно предыдущему обучению. К примеру, люди создают порядок действий, которые закладываются в блок управления робота.
— Интеллектуальные. Данные роботы имеют зачатки искусственного интеллекта, то есть они при помощи сенсорных датчиков могут без помощи людей воспринимать окружающую обстановку. То есть они создают виртуальное пространство, в котором могут ориентироваться и принимать решения о последующих действиях. То есть они могут обучаться по мере поступления опыта.
Биотехнические устройства. В эту категорию входят командные, копирующие и полуавтоматические роботы.
— Командные. Это своего рода манипуляторы, которые дистанционно управляются оператором. Оператор подает команды на движение каждому его сочленению. Если говорить прямо, то это роботы только наполовину.
— Копирующие. Это манипуляторы, которые производят копирование действия, совершаемые оператором в заданный момент времени. К примеру, человек надевает перчатку и двигает пальцами, то и копирующий робот также будет двигать своими железными пальцами.
— Полуавтоматические. Для их управления оператору необходимо лишь задавать перемещение органа манипулятора. При этом система управления устройства сама согласует все необходимые движения и при необходимости выполнит их корректировку.
- Интерактивные промышленные роботы. В эту категорию входят автоматизированные, супервизорные и диалоговые роботы.
— Автоматизированные. Это роботы, где чередуются режимы автоматического управленческого процесса с биотехническими.
— Супервизорные. Это роботы, которые выполняют работу автоматически по заданному циклу, однако перемещение от одного этапа к следующему осуществляется по командам оператора.
— Диалоговые. Это автоматические роботы различного действия, которые могут взаимодействовать с оператором, применяя язык определенного уровня. К примеру, с помощью команд голосом.
Устройство
Промышленные роботы могут иметь различное устройство, что во многом определяется задачами, которые стоят перед ними. Однако на данный момент наиболее распространенными видами подобных устройств являются роботизированные манипуляторы.
Стандартный манипулятор выполнен из семи сегментов, которые соединяются с помощью шести суставов. Каждый сегмент выполнен из металлического корпуса и проводов. В каждом сегменте присутствуют шаговые двигатели, которые заставляют суставы двигаться. Управление суставами и роботом в целом осуществляется с помощью компьютера, который заставляет вращаться конкретные шаговые двигатели. В некоторых манипуляторах вместо двигателей могут применяться пневматические или гидравлические элементы.
Главная особенность шаговых двигателей в том, что они могут обеспечивать очень точные движения. Если компьютер даст команду суставу передвинуться ровно на 15 мм, то двигатель сделает то, что от него попросят. При этом движение будет точным каждый раз при совершении одного и того же действия.
Чтобы контролировать, правильно ли робот выполняет необходимые действия, применяются датчики движения. Если происходит малейшее отклонение от заданной программы, то происходит корреляция движения. Если же наблюдается значительное отклонение и невозможность его исправления, то сигнал подается на главный компьютер. В результате робот может быть остановлен, чтобы его можно было отремонтировать.
Манипулятор также имеет устройства захвата, которые выполнены в виде человеческой руки с механическими пальцами. При необходимости захвата плоского предмета вместо механических пальцев может применяться пневматическая присоска. В случае необходимости захвата множества деталей может быть задействована конструкция в виде приспособления, специально разработанная для этого. К тому же вместо захватного устройства могут применяться и иные рабочие инструменты, к примеру, пульверизатор, отвертка и так далее.
Промышленные роботы также могут перемещаться по колее, выполненной на полу в виде монорельсов. В случае необходимости движения по неровной поверхности, используются другие конструкции, к примеру, пневматические присоски и тому подобное. Для питания роботов может использоваться аккумулятор, но чаще всего применяется промышленная электрическая сеть. Для управления используется компьютер, который командует роботом через провода или беспроводную связь. Также в самих роботах может быть установлен блок памяти, куда записывается необходимая программа.
Принцип действия
Промышленные роботы, которые имеют 6 суставов, внешне напоминают человеческую руку (плечо, локоть и запястье). В большинстве случаев плечо монтируется на неподвижной основе. В результате такой робот может иметь 6 степеней свободы, а это значит, что он способен двигаться по 6 различным направлениям.
Подобно человеческой руке манипулятор также перемещает концевой эффектор с одного места на другое. При оснащении концевого эффектора различными устройствами, у робота появляется возможность выполнять определенные технологические операции. Одним из наиболее распространенных вариантов является подобие руки, которая позволяет роботу хватать и перемещать объекты с места на место.
Довольно часто манипуляторы имеют встроенные датчики давления, благодаря чему они могут контролировать силу захвата и не ломать все подряд. К примеру, в задачу робота может входить перемещение лампочки с одного места на другое, чтобы проверить работает ли она. Если сила будет высока, то лампочка просто лопнет. Контролирование силы сжатия гарантирует, что лампочка не пострадает. При помощи других конечных эффекторов могут использоваться распылители порошка, различные дрели и так далее.
Управление такими роботами может быть выполнено:
- С помощью программы.
- Адаптивного управления. В этом случае используются сенсорные устройства. Получаемые сигналы анализируются, после чего уже выполняется необходимое действие.
- Управление осуществляется людьми, но на расстоянии.
- Своеобразным искусственным интеллектом.
Применение
Промышленные роботы могут применяться практически повсеместно. Уровень автоматизации сегодня достиг таких высот, что они могут полностью заменить человека. При этом один робот способен заменить усилия нескольких и даже десятков специалистов. Робот не будет знать отдыха и покоя, ему не нужна зарплата и отчисления в многочисленные социальные фонды, ему не нужно спать и есть. Ему не знакомы человеческие ошибки, приводящие к браку или поломке дорогостоящего инструмента и оборудования. Именно поэтому сегодня многие производства стараются автоматизировать.
Промышленные роботы часто используют для:
- Контактной сварки.
- Плазменной резки.
- Покраски.
- Литья металлов.
- Нанесения лака.
- Дуговой сварки.
- Загрузочно-погрузочных работ.
- Бесконтактной обработки.
- Транспортирования изделий.
- Обработки резанием.
- Упаковки.
- Фрезерных операций.
- Раскроя материалов.
- Контрольно-измерительных операций.
- Обработки крупногабаритных деталей.
- Раскладки уложенной продукции.
- Изготовления объемных конструкций и тому подобное.
Как выбрать
- Если решили оснастить свое производство роботами, то нужно понимать для чего их покупаете. Одни типы роботов предназначены только для выполнения определенной технологической операции, другие – могут выполнять сразу несколько. В тоже время стоимость последних может быть на порядок выше, чем первых.
- Промышленные роботы – это технически сложные устройства, которые требуют грамотного программирования, настройки и обслуживания. Поэтому важно обращаться за покупкой в компанию, которая сможет не только продать, но и обеспечить полноценное его обслуживание.
- Если не хотите думать, как вклинить промышленного робота в технологическую операцию, как его подключить и использовать, то стоит покупать робота с услугой под ключ. Специалисты продающей компании сами подберут робота под Ваши требования, привезут, установят, наладят технологический процесс, проведут обучение и обеспечат его обслуживание.
Похожие темы:
electrosam.ru
Коробка передач DSG: устройство, принцип работы, достоинства и недостатки
Есть у преселективных роботизированных КП некоторые особенности, обусловленные их конструкцией, которые некоторые пользователи записывают в недостатки, а другие не считают минусом и призывают относится к ним философски. Во-первых, на уклоне автомобиль с DSG откатывается назад, стоит водителю снять ногу с педали тормоза. Этот момент поначалу может слегка нервировать и напрягать. Во-вторых, как минимум некоторые фольксвагеновские DSG старались как можно быстрее включить более высокую ступень для достижения максимально высокой топливной экономичности, даже, если водитель того не желает. «Взбодрить» агрегат можно, включив спортивный режим, который заставляет его задерживаться на каждой передаче, раскручивать двигатель и обеспечивать желаемый уровень динамики.
Как правильно пользоваться DSG
Срок службы преселективной роботизированной коробки передач с двумя сцеплениями зависит от стиля езды и грамотности эксплуатации. Следует учитывать ее устройство и принцип работы. Эксперты рекомендуют бережно относиться к агрегатам с «сухими» сцеплениями, особенно чувствительным к агрессивному стилю вождения с резкими стартами, а также пробуксовкам и предостерегают от чип-тюнинга и других доработок, повышающих крутящий момент двигателя до критических значений. Кроме того, в городском режиме предпочтительно переключать передачи в ручном режиме, поскольку коробка быстро переходит с первой на вторую ступень и обычно стремиться включать высокие передачи – таким образом, постоянная дерготня снижает ресурс агрегата.
А еще при переключении режимов рекомендуется сильнее нажимать на педаль тормоза, чтобы диски сцепления были полностью разомкнутыми.
Неисправности коробки передач DSG
Говоря о проблемах агрегатов данного типа особо следует сказать о семиступенчатой фольксвагеновской DQ200 с «сухими» сцеплениями, в особенности прославившейся рядом неисправностей и породившей в народе настоящую DSG-фобию.
autorambler.ru
Что такое робот пылесос? История, принцип работы
Концепция роботов-пылесосов еще много лет назад появилась на страницах книг некоторых авторов. В середине 20 века в одном из журналов был напечатан роман «Дверь в лето» американского писателя-фантаста Хайнлайма. Главными действующими лицами произведения являются талантливые изобретатели роботехники. Уже в 1956 году автор произведения упоминает «Ловкого Фрэнка» — аппарат, который помогает в уборке по дому.
История появления роботов-пылесосов

(Французский художник Жан-Марк Коте в 1899 году создал зарисовки из серии «какой будет жизнь в будущем»)
Однако, в реальной жизни такие «умные помощники» появились примерно через полвека. В 1997 году в одной из передач BBС телезрители узнают о последней новинке в области техники и электроники: роботе-пылесосе. Уникальный прибор был представлен Шведской компанией Electrolux и завоевал всеобщее внимание. Несколько позже свои аналоги выпустила «IRobot Corporation». Эти первые машины относятся к роботам-пылесосам первого поколения. Роботы имели достаточно много недостатков, однако, их изобретение и выход на рынок уже было прорывом.
Начиная с 2004 года компании — производители начали выпускать роботы-пылесосы второго поколения. От приборов первого поколения они отличались более совершенной конструкцией, расширенным функционалом и большим удобством для потребителя. В 2005 году компания Siemens представила своим потребителям робот-пылесос второго поколения «Sensor Cruiser». В 2004 Electrolux выпустил свои усовершенствованные «Triobite» (2.0) второго поколения.
После 2004 года список компаний, производящих «умные» пылесосы значительно расширился. Karcher, Applica, Samsung, LG и другие компании начали выходить на этот перспективный рынок.
В России «умные» пылесосы появились лишь в 2009 году. Продукция была адаптирована под российский рынок, получила необходимые сертификаты.
Принцип работы
Функционирование «умного» пылесоса обеспечивают следующие основные системы: навигационный модуль, чистящий, механизм поиска базы и подзарядки.

- Система навигации позволяет вашему «умному помощнику» ориентироваться в доме. Корректная работа этой системы не позволяет роботу заблудиться или где-то не убраться. Выделяют основные разновидности навигационных модулей, которые предлагают разные производители: датчики робота; внешние датчики; лазер; камера.
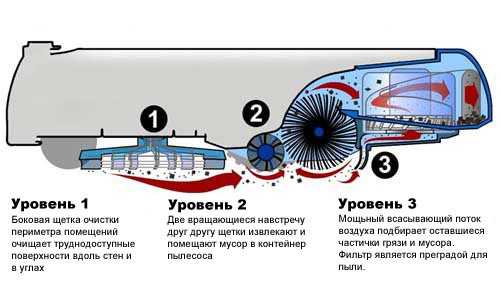
- Чистящий модуль отвечает непосредственно за очищение поверхностей в квартире. Если системы навигации у разных производителей могут значительно отличаться, то устройство чистящего модуля у всех примерно одинаково. Стандартная схема уборки «умного» пылесоса: при движении робота щетка, расположенная сбоку, собирает грязь и сметает ее под основную щетку. Основная щетка в свою очередь собирает пыль, грязь и подбрасывает в сторону пылесборника, где ее уносит потоком воздуха. Принцип уборки у «умных» пылесосов разных производителей примерно одинаков. Различия могут быть лишь в количестве основных или боковых щеток, фильтрах, а также в мощности и вместительности пылесборников.
- Механизм поиска базы и подзарядки. В роботе – пылесосе установлен аккумулятор, который дает прибору необходимый запас энергии для работы. Если аккумулятор разряжается, то робот выключается. Именно поэтому при снижении уровня зарядки до определённого уровня, в роботе включается режим поиска базы для дальнейшей подзарядки. Роботы-пылесосы, оснащенные различными навигационными системами (камеры, лазеры), запоминают свой путь и без труда сами находят базу.
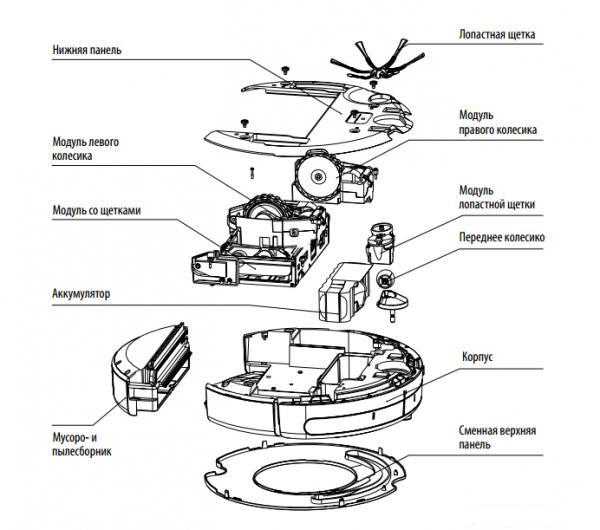
Устройство робота-пылесоса
Щетки
Важнейшим элементом робота пылесоса являются щетки. Как правило, в современных автоматических уборщиках установлены два вида щеток: основные и боковые. У пылесоса может быть одна или две основные щетки. Щетки двигаются по направлению друг к другу и собирают загрязнения. Боковые щетки находятся на нижнем краю устройства. Они отвечают за уборку в углах, а также вдоль плинтуса.
При выборе робота-пылесоса стоит обратить внимание на материал, из которого сделаны щетки. Щетки из жесткого ворса прослужат вам намного дольше, чем щетки из лески.
Пылесборник
Находится внутри пылесоса. Объемы пылесборника могут варьироваться от минимальных и до 1 л. Пылесосы с маленьким пылесборником подойдут для уборки не больших помещений, в которых нет животных. Если площадь вашего жилья более 40 кв. м. и в квартире есть домашние животные, то лучше выбирать пылесос с более объемным пылесборником.
Фильтр
Один из элементов «умного» пылесоса – фильтры. Лучше всего приобретать приборы с многослойными фильтрами.
Аккумулятор
Как правило, роботы-пылесосы оснащены следующими типами аккумуляторов: никель-металлогидридные и литий-ионные. Последний тип аккумуляторов считается более долговечным, прибор с таким аккумулятором может работать до 3 часов от одной зарядки.
Датчики
Помогают пылесосу ориентироваться в доме. Датчики могут быть трех видов: инфракрасные, ультразвуковые, лазерные. Чем выше стоимость аппарата, тем большее количество датчиков он имеет.
Виды роботов-пылесосов
Роботы-пылесосы можно условно классифицировать по нескольким основным признакам.

По выполняемым функциям выделяют:
- Устройства для сухой уборки
- Устройства, выполняющие как сухую, так и влажную уборку
По объему работ принято выделять:
- Пылесосы с маленьким радиусом использования
- Пылесосы с большим радиусом работы
По стоимости:
- Не дорогие модели (до 15 т. р.). Не отличаются мощностью, высоким качеством работы и долгим зарядом. Можно использовать для уборки не больших квартир и помещений.
- Средний ценовой сегмент (15-40 т. р.). В данной группе представлены качественные многофункциональные пылесосы с мощным аккумулятором, хорошим объемом пылесборника и датчиками.
- Дорогие модели. К данной группе относят пылесосы элитного сегмента. Они не сильно отличаются от аппаратов средней ценовой категории, однако, могут иметь полезные эксклюзивные функции (например, голосовые команды).

За и против
Стоит ли покупать робот-пылесос? Нужен ли он? Не будет ли покупка бесполезной тратой денег? Безусловно, на эти вопросы вы должны ответить себе сами.
Однако, мы напомним вам основные аргументы ЗА и ПРОТИВ покупки робота-пылесоса.
Аргументы ЗА:
- Экономит время. Особенно при наличии большой квартиры, которую необходимо долго убирать.
- Убирает не только пыль и грязь, но еще и шерсть домашних животных
- Возможность уборки в труднодоступных местах: под шкафами, столами, диванами
- Незаменимый помощник в уборке, если дома есть аллергики. Помогает всегда поддерживать квартиру в чистоте.
Аргументы ПРОТИВ:
- Высокая стоимость
- Могут возникнуть проблемы с сигнализацией, установленной в доме. Сигнализация может срабатывать в ответ на передвижения робота.
- Менее тщательная уборка в углах квартиры и труднодоступных для робота местах.
- Невозможность уборки пола под низко стоящей мебелью.
- Робот-пылесос не способен справиться с сильными загрязнениями: прилипшая к полу еда или напитки. Такие загрязнения все равно придется устранять в ходе влажной ручной уборки.
xn--80abmurblt.xn--p1ai