Принцип работы рулевого колеса на грузовом авто – ГК «Кориб»
Рулевое управление – это важнейший механизм, без которого не передвигается ни один автомобиль будь то модель КАМАЗа или грузовик JAC. За счёт совокупности узлов эта система позволяет добиться высокой управляемости и стабильности на дороге. Все компоненты механизма работают для того, чтобы синхронизировать каждое движение руля с ведущими колёсами. В этой статье мы рассмотрим, каким образом это достигается и, какие проблемы могут возникнуть в системе рулевого управления.
Общая система рулевого управления
Конструкция рулевого управления любого автомобиля включает в себя ряд наиболее важных компонентов:
- Руль. Колесо, посредством которого водитель и управляет автомобилем. Является посредником, передающим его команды остальным механизмам;
- Рулевая колонка. Часть, на которой установлен руль. Внешне представлена в виде вала с множеством шарниров. Необходима, чтобы передавать усилия от руля остальным компонентам систему управления.
 Для повышения уровня безопасности часто оборудуется системами блокировки и складывания;
Для повышения уровня безопасности часто оборудуется системами блокировки и складывания; - Рулевой механизм. Получает усилие от колонки, изменяя его и передавая дальше;
- Усилитель. Того усилия, которое водитель прикладывает при движении руля, недостаточно, чтобы повернуть тяжёлые колёса грузового автомобиля. Этот компонент необходим для его усиления, что существенно упрощает процесс управления;
- Дополнительные элементы. Они используются, чтобы упростить управление или сделать его боле стабильным. Для этого в систему добавляют демпферы, амортизаторы и прочие компоненты.
 Для повышения уровня безопасности часто оборудуется системами блокировки и складывания;
Для повышения уровня безопасности часто оборудуется системами блокировки и складывания;Принцип работы
КамАЗ 5490 НЕО 2 и другие седельные тягачи имеют в своей основе подобные системы управления. Ведущие колёса установлены на специальные поворотные кулаки. Они же присоединены к передней оси посредством шкворни. Когда водитель крутит руль, его действие последовательно передаётся по системе управления, обретает большую мощность, проходя через усилитель. После этого за счёт специальных тяг и рычагов попадает на поворотные кулаки, за счёт которых и происходит поворот ведущих колёс грузовика.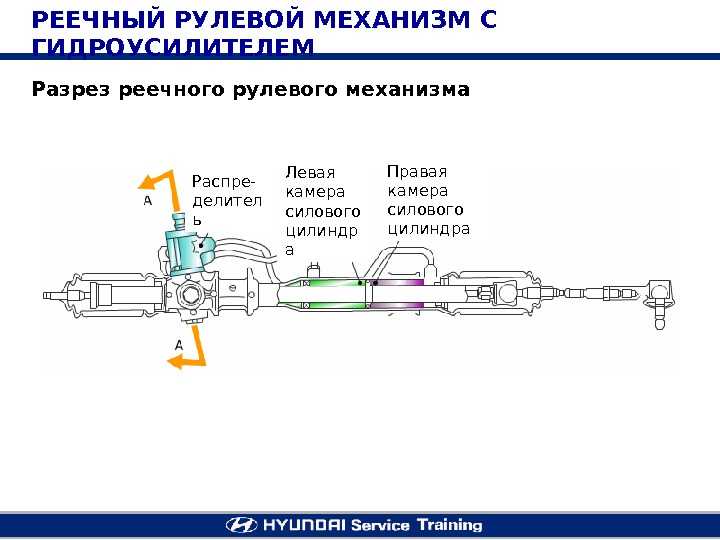
Исходя из этого, можно выделить 3 основные задачи, выполняемые рулевым управлением:
- Увеличение усилия, оказанного на руль;
- Его передача на поворотные кулаки;
- Восстановление руля в исходное положение в зависимости от оказанного усилия.
Типы рулевого управления
Перед тем, как брать КамАЗ в лизинг стоит определиться со способами его управления. Выделяют три основных типа:
- Реечный. Самый распространённый механизм. Но чаще всего он встречается на легковых автомобилях. Он не способен создавать серьёзное усилие, поэтому на грузовиках его не встретишь;
- Винтовой. В таком механизме гайка и винт соединяются посредством шарниров. За счёт этого снижается вибрация и скорость износа. Позволяет создавать большое усилие, из-за чего часто используется в грузовиках и автобусах;
- Червячный. Такие системы имеют больший угол поворота и лучше выдерживают ударные нагрузки. Поэтому они считаются более управляемыми и надёжными. Но стоят они дороже и требуют постоянной регулировки.

Требования к рулевому управлению грузовика
Для систем управления грузовым автомобилем существует собственный перечень требований, которым она обязана соответствовать:
- Высокая жёсткость деталей;
- Минимальный крутящий момент для поворота руля;
- Способность поддерживать необходимое передаточное число;
- Отсутствие зазоров;
- Хороший стабилизирующий момент;
- Рулевой привод и управляющее подвеской устройство должны двигаться согласовано.
Основные неисправности рулевого управления
В процессе эксплуатации рулевое колесо изнашивается, возникают проблемы в его работе, а характеристики ухудшаются. Среди часто возникающих проблем:
- Нарушилась герметичность системы;
- На наконечнике тяги разрушился шарнир;
- Шестерни и рейки вышли из строя;
- Подшипник рулевого вала сильно износился.
Всё это может является причиной обратиться в сервисный центр официального представителя КамАЗ. Там проведут диагностику всей рулевой системы, восстановят и заменят износившиеся и повреждённые компоненты. Не стоит откладывать обращение в сервис, потому что от управляемости автомобиля зависит ваша безопасность.
Там проведут диагностику всей рулевой системы, восстановят и заменят износившиеся и повреждённые компоненты. Не стоит откладывать обращение в сервис, потому что от управляемости автомобиля зависит ваша безопасность.
Особенности правостороннего и левостороннего руля
В большинстве российских грузовых автомобилей руль установлен слева. Услуга «доработка КАМАЗа» поможет вам изменить конфигурацию грузовика, переместив его вправо. Отличие заключается не только в месте установки рулевого колеса, но и в редукторе, подходящем под конкретную сторону.
В остальном, расположение руля влияет только на удобство управления. В условиях правостороннего движения рулевое колесо справа будет доставлять некоторые неудобства. Но, некоторые водители, которые перевозят грузы по разным странам, в которых установлено левостороннее движение, устанавливают на свои автомобили руль справа.
Видео: «Рулевое управление грузового автомобиля»
Рулевое управление автомобиля — назначение и устройство
Главная / Учебник по устройству автомобиля / Глава 8. Рулевое управление » Подраздел 8.1 Назначение и устройство рулевого управления
Рулевое управление предназначено для изменения направления движения автомобиля. Обычно управляемыми являются колеса передней оси, но это преимущественно на легковых автомобилях. Иногда для улучшения управляемости автомобиля и сохранения над ним полного контроля его делают полноуправляемым, то есть управляемыми являются не только основные передние колеса – задние также имеют возможность отклоняться на определенный угол.
Рулевое управление может быть с усилителем или без него, может устанавливаться на поперечине кузова в моторном отсеке или на подрамнике (практически на всех современных автомобилях).
Устройство рулевого управления
Рисунок 8.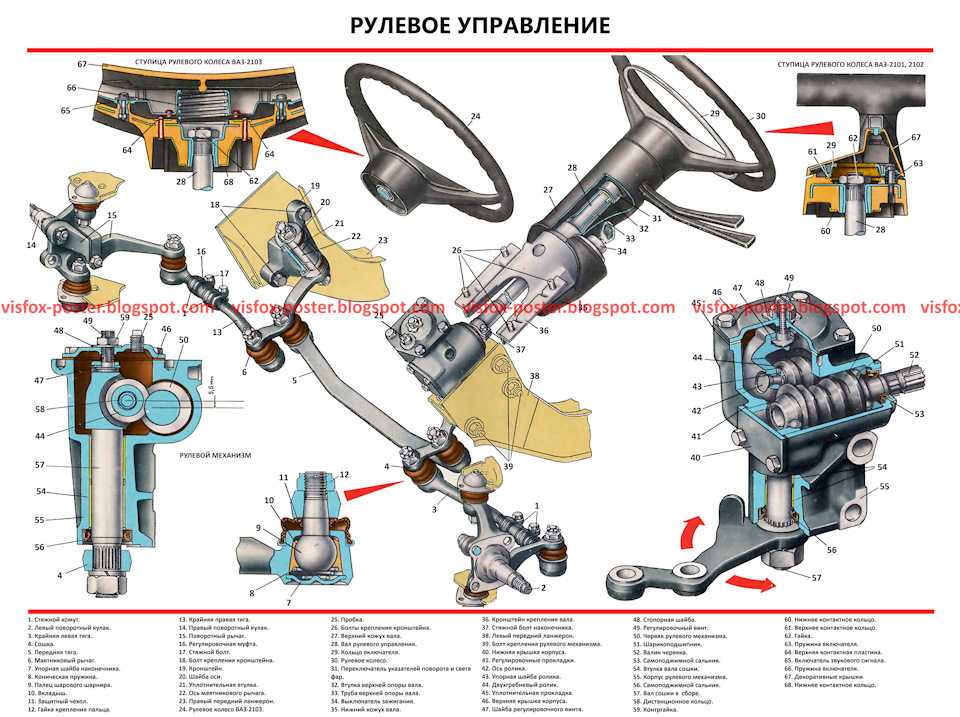
1 – рулевое колесо; 2 – гайка крепления рулевого колеса; 3 – верхний кожух рулевой колонки; 4 – шестерня рулевого редуктора; 5 – фланец рулевого вала; 6 – рулевой вал; 7 – труба рулевого вала; 8 – нижний кожух рулевой колонки; 9 – шаровой шарнир; 10 – наконечник рулевой тяги; 11 – пыльник; 12 – рейка рулевого редуктора; 13 – болт крепления рулевой тяги; 14 – стопорная пластина; 15 – рулевая тяга; 16 – поворотный рычаг передней стойки.
Рулевое колесо и рулевая колонка
Садясь в автомобиль на место водителя, первое, что вы видите, — это рулевое колесо. Вращая его в ту или иную сторону, вы направляете автомобиль. Ничего в рулевом колесе (или руле) сложного нет… если это, конечно, руль автомобиля самой простой комплектации. В современных автомобилях руль — это и место для установки подушки безопасности, и пульт управления аудиосистемой вместе с телефоном, также это контроллер для управления бортовым компьютером. Рулевое колесо современного автомобиля иногда бывает попросту перегружено всяческими переключателями и кнопками, которые имеют различное назначение.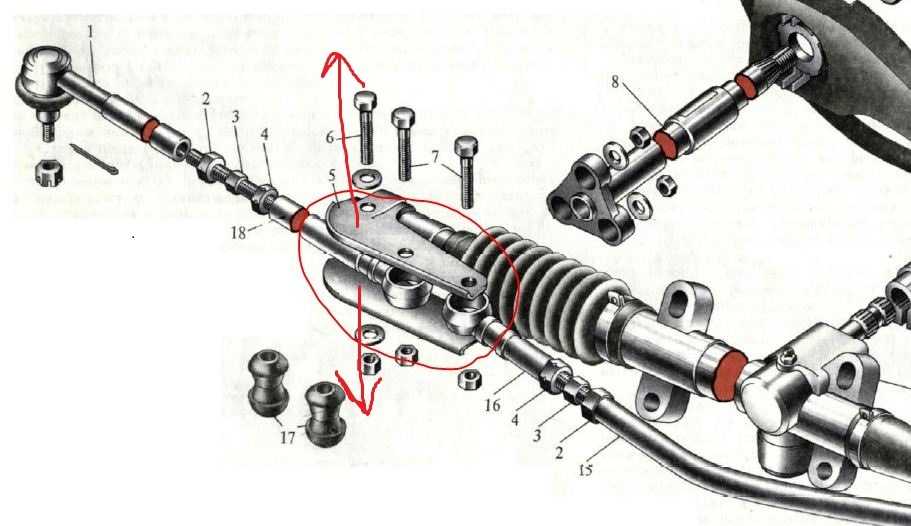
Рулевая колонка, это, по сути, два вала (реже один), соединенных между собой универсальными шарнирами (похожими на карданные). Она призвана передавать вращение от рулевого колеса к рулевому механизму. На многих нынешних автомобилях предусмотрена регулировка угла наклона рулевого колеса и расстояния его вылета. Другими словами, вы можете, перемещая рулевое колесо вверх/вниз и на себя/от себя, установить то положение, которое наиболее близко к идеальному, согласно вашим пожеланиям.
Примечание
Для обеспечения высоких показателей пассивной безопасности, к проектированию рулевой колонки относятся так же серьезно, как и, например, к проектированию сиденья. Это связано с тем, что при фронтальном столкновении рулевое колесо не должно смещаться более, чем это допустимо. Поэтому при столкновении рулевая колонка должна складываться или ломаться в определенных местах.
Рулевой механизм
На современных легковых автомобилях применяются два самых распространенных типа рулевых механизмов: червячный и реечный.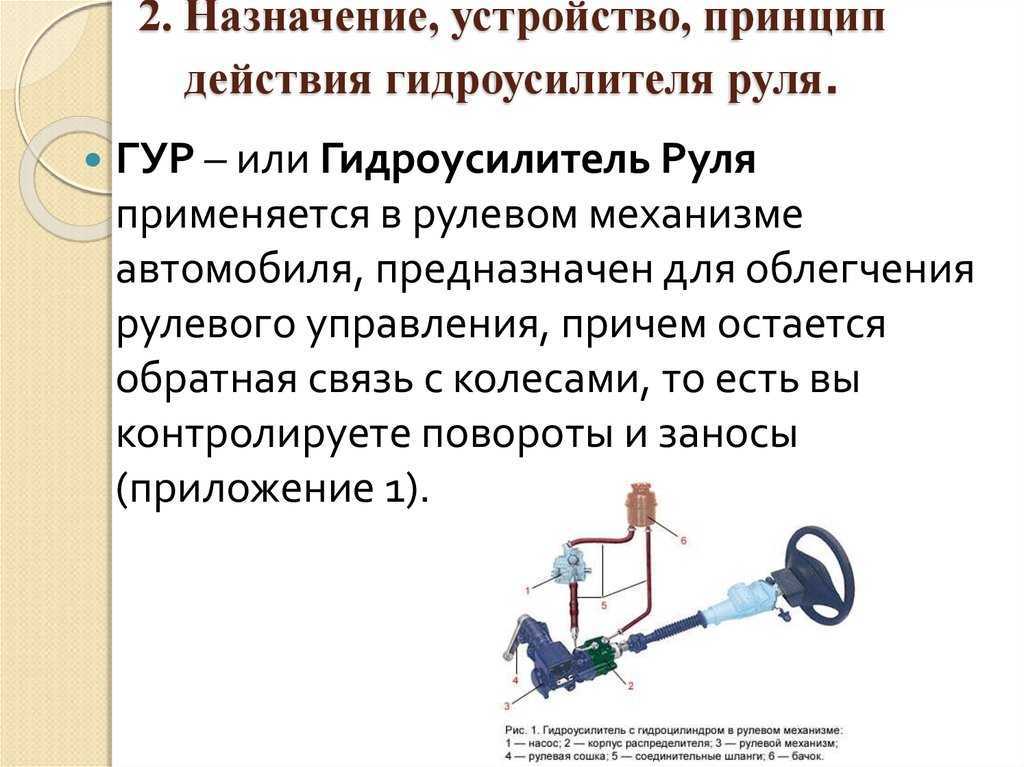
Интересно
Огромное значение имеет место расположения на подрамнике рулевого механизма относительно воображаемой оси управляемых колес. Так, установка рулевого механизма за передней осью или перед ней в итоге может кардинально изменить поведение автомобиля на дороге, поэтому конструкторы при проектировании автомобиля подходят к этому вопросу очень серьезно.
Червячный рулевой механизм
Если рулевой механизм червячный, то он состоит из глобоидного червяка и углового сектора, на который установлен ролик. К угловому сектору подсоединен вал, а на валу закреплена сошка. Перемещение сошки передается на рулевую трапецию, которая состоит из рулевых тяг. Тяги, перемещаясь, поворачивают колеса в ту или иную сторону. Устройство рулевого механизма показано на рисунке 8.2. Сейчас автомобили с червячным рулевым механизмом встречаются все реже.
Рисунок 8.2 Червячный рулевой механизм.
Червячная передача – это такой тип передачи, в которой имеется червяк, представляющий собой резьбовую часть болта, но только с увеличенными во много раз витками, и шестерня, входящая в зацепление с этим червяком.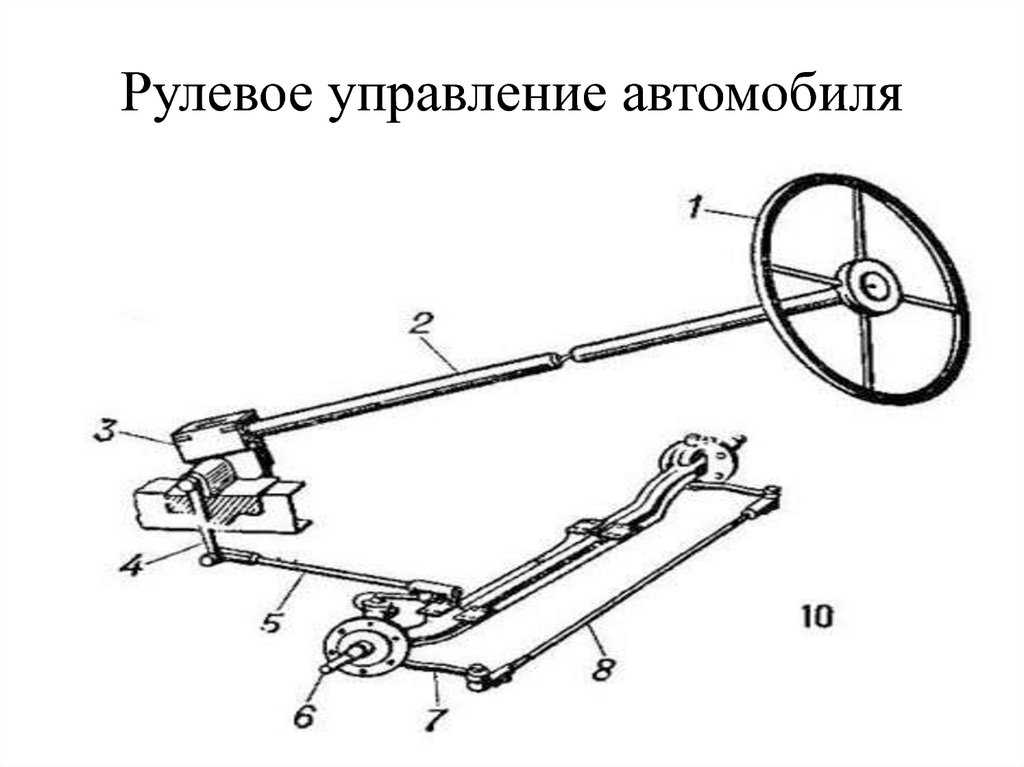
Глобоидным червяк называется из-за своей формы: его профиль вогнутый, как показано на рисунке 8.3.
Рисунок 8.3 Внешний вид глобоидного червяка.
Реечный рулевой механизм
Теперь опишем реечный рулевой механизм (рисунок 8.4). Он состоит из шестерни и зубчатой рейки. Шестерня соединена с валом рулевой колонки, а рейка через тяги – с поворотными кулаками колес.
Рисунок 8.4 Реечный рулевой механизм.
Интересно
Иногда зубья на рейке наносят с переменным шагом (рисунок 8.5). Делают это для того, чтобы получить подобие активного рулевого управления для получения сочетания таких противоречивых показателей, как управляемость и комфорт. Так, для того чтобы при парковке водитель не вращал рулевое колесо на 5—10 оборотов в угоду легкости, желательно, чтобы число оборотов от упора до упора составляло как можно меньше – один, а то и пол-оборота. Но если от правого крайнего положения руля до левого будет всего один оборот, то рулевое управление будет довольно чувствительным к каждому движению, что опасно при движении на высоких скоростях, так как плавно выполнить все маневры не удастся, а это чревато последствиями. Вот и пришли к такому довольно простому компромиссному решению: шаг центральных зубьев рулевой рейки небольшой, а передаточное отношение чуть выше, а, следовательно, и чувствительность к отклонению рулевого колеса небольшая. Но от центра шаг зубьев увеличивается, чтобы уменьшить передаточное отношение и общее число оборотов рулевого колеса.
Вот и пришли к такому довольно простому компромиссному решению: шаг центральных зубьев рулевой рейки небольшой, а передаточное отношение чуть выше, а, следовательно, и чувствительность к отклонению рулевого колеса небольшая. Но от центра шаг зубьев увеличивается, чтобы уменьшить передаточное отношение и общее число оборотов рулевого колеса.
Рисунок 8.5 Пример зубчатой рейки рулевого механизма с переменным шагом зубьев.
Примечание
Шаг зубьев – это расстояние между центрами вершин зубьев.
Интересно
Кстати, может быть и обратная ситуация, когда шаг зубьев рейки уменьшается ближе к концам рейки.
Реечный рулевой механизм занял место червячного и основательно закрепился как наиболее актуальная конструкция, так как его преимущества говорят сами за себя: управление автомобилем, даже не оборудованным усилителем рулевого управления, несложное, небольшое количество звеньев всего рулевого механизма, простота монтажа на автомобиль и сведение к минимуму операций по обслуживанию.
Рулевой привод
Рулевой привод — это набор тяг и шарниров, связывающих и передающих перемещения от рулевого механизма к поворотным кулакам управляемых колес.
Если вернуться к червячному рулевому механизму, то в классической схеме имеются три тяги — одна центральная и две боковые, они соединяются через шарниры. Тяги рулевого привода в данном случае называют рулевой трапецией. Конструкция рулевой трапеции в геометрическом плане такова, что она обеспечивает поворот управляемых колес на разные углы (смотрите главу «Ходовая часть»).
При условии установки реечного рулевого механизма все немного проще. К рулевой рейке крепятся рулевые тяги с обеих сторон, которые передают перемещение на поворотные кулаки колес. Преимущества очевидны, ведь чем меньше различных промежуточных звеньев, тем надежнее и точнее весь механизм.
Примечание
Чтобы исключить попадание грязи и пыли в корпус реечного рулевого механизма, с обеих его сторон установлены так называемые пыльники (гофрированные резиновые чехлы).
Углы поворота управляемых колес
При повороте управляемые колеса автомобиля проходят различные расстояния. И если оба колеса будут поворачиваться на одинаковый угол, автомобиль будет смещаться с заданной траектории, при этом шины колес будут значительно быстрее изнашиваться.
Рисунок 8.6 Поворот управляемых колес на разные углы.
Для того чтобы избежать этого, рулевое управление проектируют таким образом, чтобы обеспечить поворот внутреннего колеса на больший угол относительно наружного.
Рисунок 8.7 Поворот управляемых колес на различные углы.
Глава 8. Рулевое управление | Аэродинамика автомобиля Общие сведения о электрооборудовании автомобиля | Подраздел 8.2 Назначение и типы усилителей рулевого управления |
Please enable JavaScript to view the comments powered by Disqus. comments powered by Disqus
Как работает автомобильное рулевое управление? – Garage Pro
Сердце автомобиля – двигатель, но что толку, если не умеешь рулить в нужном направлении. Рулевое колесо так же важно, как и любой другой компонент автомобиля, и оно существует с момента появления автомобилей. Рулевое колесо эволюционировало от одноручного из моноруля спереди, как в первых автомобилях, до привычного нам полноценного руля. Но это не так, даже тот руль, который сегодня используется в автомобилях, можно разделить на различные типы.
Рулевое колесо так же важно, как и любой другой компонент автомобиля, и оно существует с момента появления автомобилей. Рулевое колесо эволюционировало от одноручного из моноруля спереди, как в первых автомобилях, до привычного нам полноценного руля. Но это не так, даже тот руль, который сегодня используется в автомобилях, можно разделить на различные типы.
Типы рулевого управления
За более чем столетие существования было создано две идеальные конструкции рулевого управления, которые были установлены и работали более чем на миллионах автомобилей; наиболее часто используемая система реечной передачи и обычная система, известная как система рулевого управления с рециркуляцией шариков.
Система рулевого управления с реечной передачей
Источник — здесь
Система рулевого управления с реечной передачей является самой простой и эффективной из когда-либо существовавших систем рулевого управления. Как следует из названия, двумя важными компонентами рулевого управления автомобиля являются две шестерни; рейка (линейная передача) и шестерня (круглая передача). Эта система, благодаря своей простоте и малому весу, используется в большинстве автомобилей, за исключением большегрузных автомобилей.
Как следует из названия, двумя важными компонентами рулевого управления автомобиля являются две шестерни; рейка (линейная передача) и шестерня (круглая передача). Эта система, благодаря своей простоте и малому весу, используется в большинстве автомобилей, за исключением большегрузных автомобилей.
Конструкция
Система рулевого управления автомобиля имеет длинный вал, к другому концу которого присоединяется шестерня. Шестерня расположена в верхней части рейки. Рейка перемещается при вращении шестерни. На конце рейки находятся рулевые тяги, это то, что соединяет рейку с рулевыми рычагами, которые далее соединяются со ступицей колеса.
Рабочий
При вращении рулевого колеса автомобиля вал вращается. Это, в свою очередь, приводит во вращение ведущую шестерню, которая находится наверху рейки. Вращение шестерни заставляет рейку двигаться линейно, перемещая рулевые тяги. Рулевые тяги, соединенные с рулевым рычагом, которые затем соединяются со ступицей колеса, перемещаются с линейным движением.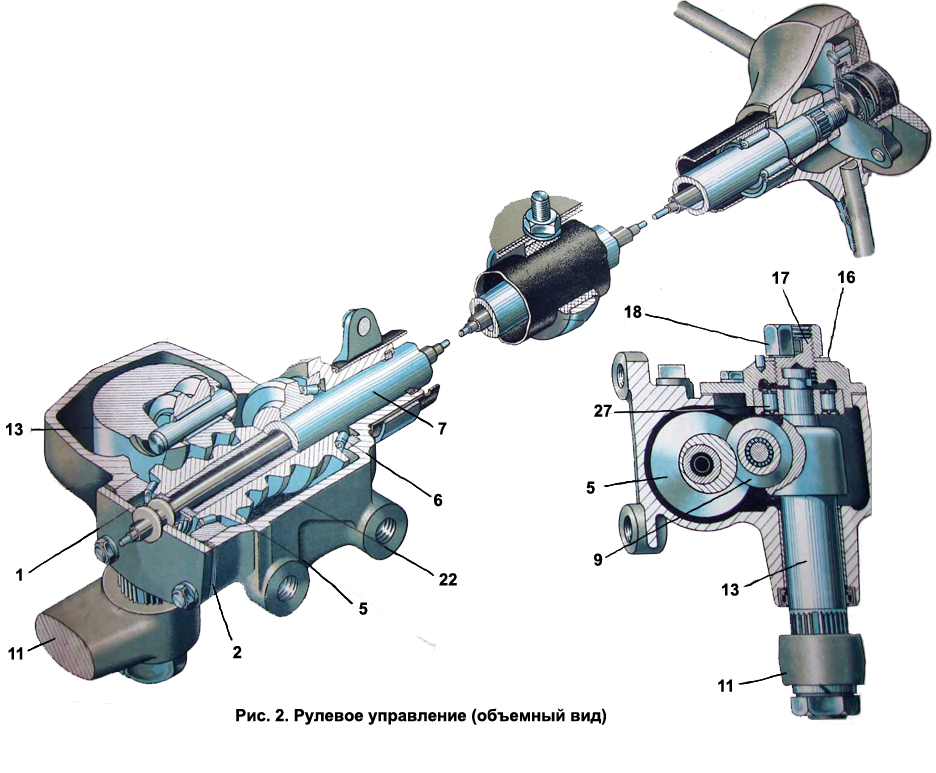 Размер шестерни определяет усилие, необходимое для поворота на 360 градусов. Чем крупнее ведущая шестерня, тем более отзывчиво рулевое управление автомобилем, но это затрудняет управление транспортными средствами.
Размер шестерни определяет усилие, необходимое для поворота на 360 градусов. Чем крупнее ведущая шестерня, тем более отзывчиво рулевое управление автомобилем, но это затрудняет управление транспортными средствами.
Плюсы
- Экономичная и несложная конструкция
- простая конструкция
- Хорошая степень эффективности
- Компактный
- Легко ограничить ход рулевой рейки и, следовательно, угол поворота рулевого колеса
Минусы
- Повышенная чувствительность к ударам
- Требуется более высокое напряжение для преодоления угловых сил стяжных стержней
- Размер руля зависит от размера багажника
- Беспорядок легче рулить
- иногда требуются короткие рулевые рычаги, что приводит к увеличению усилий во всей системе рулевого управления
Шариковый рециркуляционный тип
В то время как система рулевого управления с реечной передачей была оборудована в различных автомобилях для ежедневных поездок. Но когда речь идет о большегрузных и коммерческих транспортных средствах, автомобильная система рулевого управления с рециркуляцией шариков исключает использование реечной передачи.
Но когда речь идет о большегрузных и коммерческих транспортных средствах, автомобильная система рулевого управления с рециркуляцией шариков исключает использование реечной передачи.
Конструкция
Рециркуляционная система автомобиля шарового типа состоит из червячной передачи и секторной передачи. Рулевое колесо соединено с резьбовым валом, который соединен с блоком. Червячная передача довольно большая и проходит через блок с резьбой таким образом, что позволяет червячной передаче войти внутрь. Этот блок имеет снаружи зубья шестерни, с которыми соединяется секторная шестерня. Эта секторная шестерня затем соединяется с шатуном, а шатун прикрепляется к рулевой тяге. Внутри блока находятся шарикоподшипники, заполняющие резьбу червячной передачи. Работа проста, как и зубчатая рейка.
Рабочий
Рулевое колесо автомобиля вращает соединенный с ним вал, а вместе с ним вращается и червячная передача. Шестерня закреплена болтами, чтобы предотвратить ее движение вверх и вниз. Когда червячная передача вращается, блок перемещается. Подвижный блок заставляет двигаться сектор, который, в свою очередь, перемещает шатун. Резьба червячной передачи внутри блока заполнена шарикоподшипниками, чтобы уменьшить трение и избежать проскальзывания.
Шестерня закреплена болтами, чтобы предотвратить ее движение вверх и вниз. Когда червячная передача вращается, блок перемещается. Подвижный блок заставляет двигаться сектор, который, в свою очередь, перемещает шатун. Резьба червячной передачи внутри блока заполнена шарикоподшипниками, чтобы уменьшить трение и избежать проскальзывания.
Плюсы
- Может быть интегрирован с жесткими осями
- Может выдерживать большие нагрузки
- Возможны большие углы входа колеса, что дополнительно увеличивает передаточное отношение
- Увеличивает возможность использования длинных рулевых тяг
- Это приводит лишь к незначительной нагрузке на шахту и промежуточные рычаги в случае возникновения диагональных сил поперечной рулевой тяги.
Минусы
- Более высокая стоимость
- тяжелее реечной передачи
- Менее отзывчивый
- Мертвая точка — в определенный момент обратная связь руля будет равна нулю.

С реечным рулевым управлением и рециркуляционным шариковым рулевым управлением, ручное рулевое управление покрыто. Но есть еще два типа вторичных систем рулевого управления автомобиля; гидроусилитель руля и гидравлические системы рулевого управления автомобиля. Они спешно заменяют старые системы ручного управления автомобилями из-за их эффективности и простоты использования. Так что давайте узнаем о них тоже.
Гидравлическая система рулевого управления
Несмотря на то, что реечная и рециркуляционная системы рулевого управления эффективны, они требуют много тяжелой работы. Именно здесь гидравлическая система рулевого управления спасает от мускулистости рук. Единственная разница между ручной и гидравлической системой рулевого управления автомобилем заключается в том, что она снижает усилия, используя некоторую науку. Внутренняя полость рулевого механизма разделена на две камеры, в каждой из которых находится герметичный поршень, прикрепленный к рейке.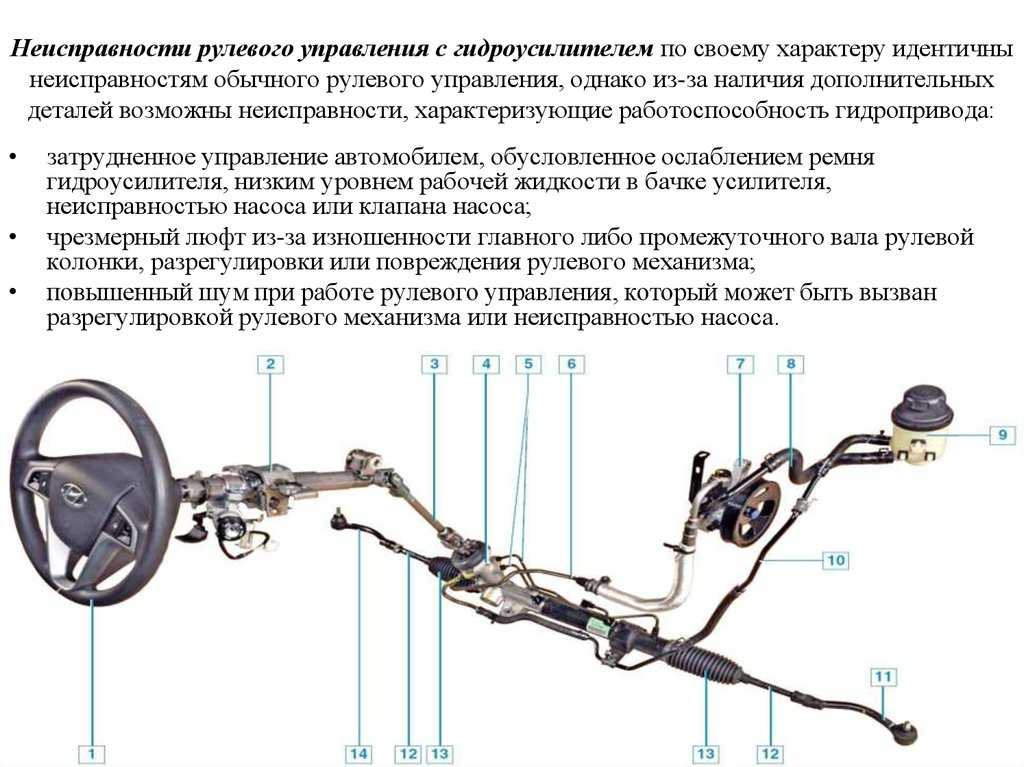 Приложение силы к одной стороне поршня вынуждает жидкость с другой стороны возвращаться в резервуар, тем самым обеспечивая помощь в рулевом управлении. Это снижает усилие, необходимое для поворота руля, несмотря на большую собственную массу автомобиля.
Приложение силы к одной стороне поршня вынуждает жидкость с другой стороны возвращаться в резервуар, тем самым обеспечивая помощь в рулевом управлении. Это снижает усилие, необходимое для поворота руля, несмотря на большую собственную массу автомобиля.
Рекомендуется — Общие автомобильные шумы | Что они означают и что делать?
Система рулевого управления с усилителем
Подобно гидравлической системе рулевого управления, система рулевого управления с усилителем помогает водителю прилагать минимальные усилия для поворота колес. Здесь сбоку корпуса стойки установлен электродвигатель, который через зубчатый резиновый ремень приводит в движение шарико-винтовой механизм. Этот винт входит в зацепление со спиральным зубчатым колесом снаружи рулевой рейки, которое, в свою очередь, соответствующим образом перемещает рулевой рычаг. Рулевое управление с усилителем оснащено датчиком крутящего момента, который считывает положение рулевого колеса и его вращение и направляет управляющий компьютер на помощь.
Инновационные системы автомобильного рулевого управления
Ознакомившись с ручным и гидроусилителем рулевого управления, давайте перейдем к некоторым инновационным технологиям, которые сделали рулевое управление более эффективным и легким.
Компания Nissan стала первым OEM-производителем, представившим систему электронного рулевого управления. Система считывает намерение водителя по приложенному крутящему моменту и углу поворота. Компьютеры считывают данные с рулевого колеса. Каждое колесо управляется независимо, поэтому система способна улучшить устойчивость и маневренность.
Кроме того, управление четырьмя колесами существует уже давно, а роскошные седаны, такие как Mercedes Benz S-Class, Rolls Royce Ghost и даже суперкары, такие как Lamborghini Aventador, оснащены этой технологией. В этой системе рулевого управления задние колеса также могут поворачиваться на определенные углы. На более низких скоростях задние колеса поворачиваются в противоположном направлении, что уменьшает радиус поворота транспортных средств.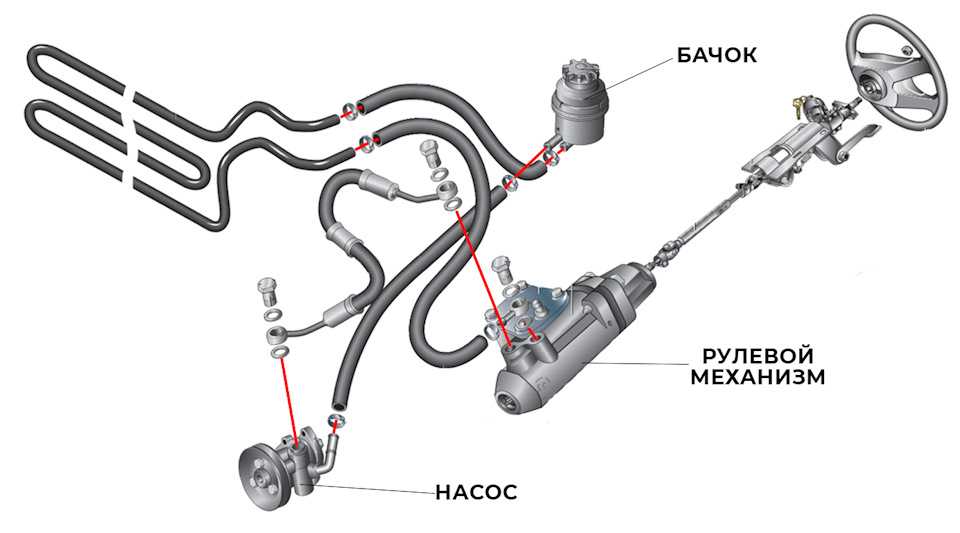 На более высоких скоростях задние колеса поворачиваются в том же направлении, чтобы одновременно повысить маневренность и устойчивость.
На более высоких скоростях задние колеса поворачиваются в том же направлении, чтобы одновременно повысить маневренность и устойчивость.
Система рулевого управления автомобиля также была дополнена системой помощи при удержании полосы движения и адаптивным круиз-контролем. Эти системы вносят незначительные изменения, управляя автомобилем, чтобы он оставался внутри полосы движения. Эти средства помощи водителю снижают утомляемость водителя на длинных маршрутах и делают вождение легким.
Рекомендуется — различные типы люков
Будущее?
Система рулевого управления автомобиля развивалась на протяжении веков. Ручные системы рулевого управления были заменены системами с усилителем, а инновационные технологии сделали автомобили более маневренными и маневренными. Но с такими темпами и ростом популярности автономных транспортных средств, не скоро рули полностью исчезнут и их возьмет на себя искусственный интеллект.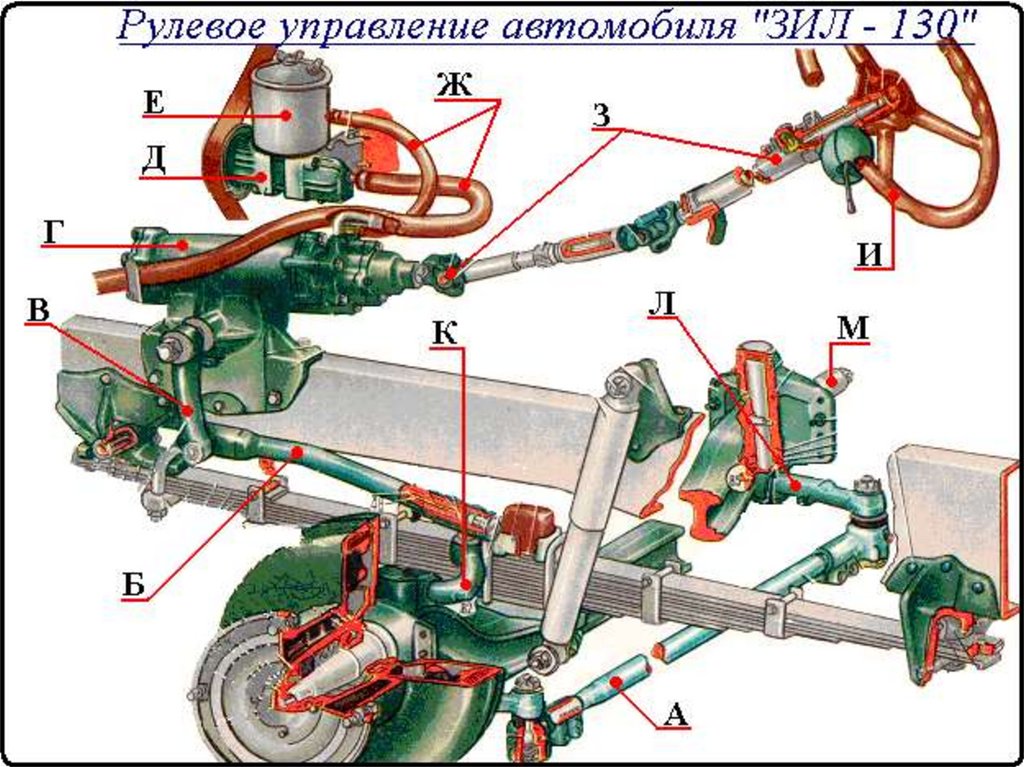
Как работает система управления четырьмя колесами?
Машины становятся все более технологически сложными, физически большими и дико тяжелыми — Я смотрю на вас, GMC Hummer . Отчасти это связано с повышенными стандартами безопасности в отношении риска опрокидывания, смещенных ударов и необходимости использования высокопрочной стали в конструкции транспортного средства при столкновении, но безопасность — не единственная причина. Существует также множество электрифицированных предложений, которые добавили вес из-за плотных аккумуляторных систем.
Независимо от причины этой тенденции к увеличению масштаба, результат один и тот же: дерьмовое обращение. Вес и размер приводят к ужасающе медленным изменениям направления. На ум приходит старая поговорка о трудности корректировки курса корабля. Однако потребители по-прежнему требуют от своих 6000-фунтовых Rolls-Royce Cullinan управляемости спортивных автомобилей, поэтому рулевое управление четырьмя колесами быстро стало одной из механических опор автомобильного мира.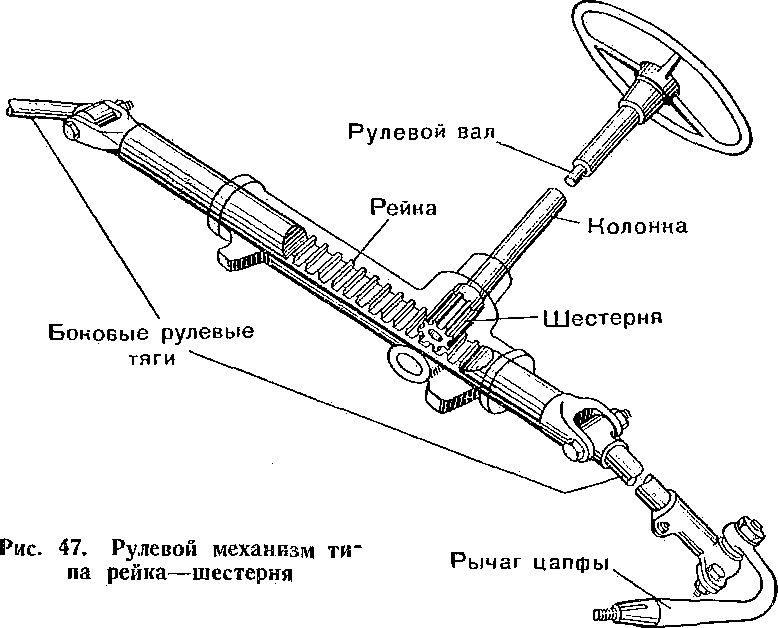
Термин «управление четырьмя колесами» имеет несколько вариаций, таких как управление всеми колесами и управление задними колесами (как в последнем объявлении Tesla Cybertruck). С таким количеством терминов и даже названий брендов, которые используются там, это может сильно сбить с толку обычного человека, пролистывающего последнюю брошюру Porsche.
Чтобы лучше пролить свет на рулевое управление задними колесами, которое было изобретено в 1893 году, В разделе Guides & Gear журнала The Drive собрано исчерпывающее объяснение систем управления четырьмя колесами, как они работают, кто их производит и как они влияют производительность вашей поездки. Давайте покатаемся.
Задний мост Bentley Continental GT. , BentleyЧто такое система управления четырьмя колесами и как она работает?
Управление задними колесами представляет собой механизм, который при повороте рулевого колеса приводит в действие углы задних колес и либо поворачивает их вместе с передними колесами, либо в противоположном направлении, чтобы лучше увеличить скорость транспортного средства на низкой или высокой скорости ловкость.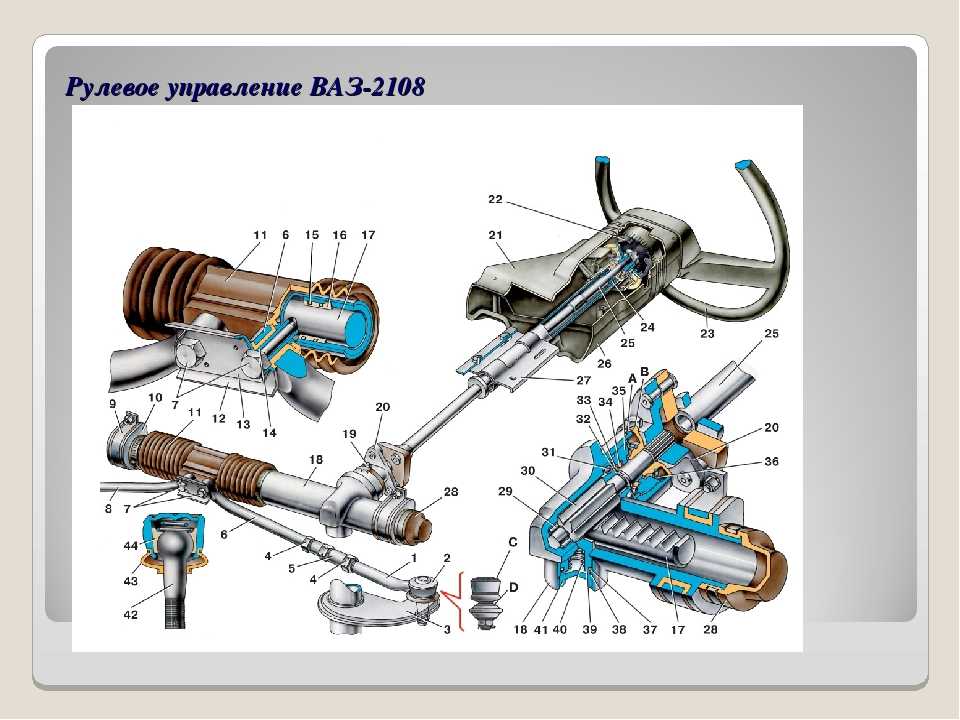
Вскоре мы рассмотрим различные типы систем управления задними колесами, но основная предпосылка этих систем заключается в использовании набора гидравлических или электрических приводов для изменения схождения задних колес.
Схождение относится к углу, под которым колесо направлено внутрь или наружу от автомобиля, отсюда и термины «схождение внутрь» и «схождение наружу». Носок также может быть описан как отрицательный и положительный. В большинстве ситуаций схождение относится к передним колесам автомобиля и, в зависимости от того, направлены ли оба колеса внутрь или наружу, оно влияет на устойчивость автомобиля на высоких скоростях (схождение внутрь) или маневренность на низких скоростях (схождение наружу).
При управлении задними колесами система автомобиля изменяет схождение обоих задних колес в тандеме, что означает, что задние колеса перемещаются вправо или влево синхронно, поэтому они направлены в одном направлении. Это полная противоположность тому, как работает схождение передних колес автомобиля.
Хотя каждая система уникальна, результирующее движение задних колес при управлении четырьмя колесами абсолютно одинаково для разных систем. Когда водитель поворачивает руль на малой скорости, передние колеса поворачиваются в направлении движения, а задние колеса поворачиваются в противоположном направлении, эффективно уменьшая радиус поворота автомобиля. Это делает маневры на низкой скорости более быстрыми и легкими.
Рулевое управление на более высоких скоростях поворачивает передние и задние колеса в одном направлении для повышения устойчивости на высоких скоростях. В мире производительности это означает, что у вас может быть длинный, несколько тяжелый автомобиль, такой как Porsche Panamera, который может идти в ногу со спортивным автомобилем с более короткой колесной базой, таким как Porsche 9.11.
Эти системы также дают более крупным и тяжелым автомобилям более высокие характеристики, чем если бы вращались только передние колеса.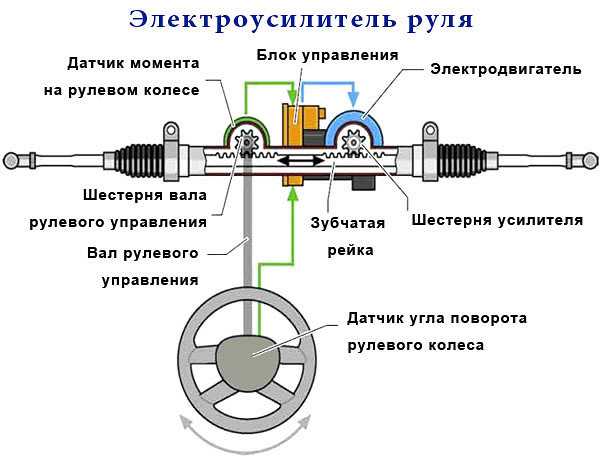 Это видно на таких примерах, как Lamborghini Urus, Bentley Flying Spur и Mercedes-Benz S-класса.
Это видно на таких примерах, как Lamborghini Urus, Bentley Flying Spur и Mercedes-Benz S-класса.
Существуют разные типы рулевого управления четырьмя колесами
Различные производители предлагают разные решения для управления задними колесами, хотя все они служат одним и тем же целям. Некоторые полагаются только на механические системы, такие как старая система Nissan HICAS (High-Capacity Actively Controlled Steering), в то время как большинство использует электромеханические версии, такие как система динамического управления всеми колесами Audi, система рулевого управления задними колесами Porsche и Active. Системы управления кинематикой (AKC), поставляемые ZF таким производителям, как Ferrari и Cadillac.
Опять же, эти две системы работают практически одинаково, изменяя схождение задних колес внутрь или наружу, но они различаются тем, что их приводит в действие. В механической системе, такой как Nissan HICAS, которая не использовалась в автомобилях Nissan со времен GT-R поколения R34 или в Infiniti со времен G37, для приведения в действие колес использовалась гидравлика, приводимая в действие насосом гидроусилителя рулевого управления. Затем датчики скорости будут использоваться, чтобы определить, в какую сторону повернутся задние колеса и насколько. Похожая система была у Honda Prelude Si 4WS.
В механической системе, такой как Nissan HICAS, которая не использовалась в автомобилях Nissan со времен GT-R поколения R34 или в Infiniti со времен G37, для приведения в действие колес использовалась гидравлика, приводимая в действие насосом гидроусилителя рулевого управления. Затем датчики скорости будут использоваться, чтобы определить, в какую сторону повернутся задние колеса и насколько. Похожая система была у Honda Prelude Si 4WS.
Электромеханические системы управления четырьмя колесами теперь гораздо более распространены и более совершенны, чем их более ранние версии. Управляемые электронным блоком управления автомобилем и несколькими датчиками вдоль трансмиссии, современные системы рулевого управления четырьмя колесами обеспечивают гораздо более точное расположение колес, углы и возможности, чем их предшественники.
Хотя основной результат один и тот же, производители также различаются по допустимому углу поворота задних колес: от 1 до 15 градусов.
О.Г. Четырехколесные автомобили и как они работали полноприводные спортивные автомобили.
Задний подрамник системы Super HICAS., NissanNissan GT-R HICAS
Хотя система Nissan HICAS известна своим использованием на платформе Skyline GT-R, она не была первой, кто ее получил. Система была впервые продемонстрирована в 1985 году, но ее первое практическое применение было на Skyline GTS 1986 года.
HICAS был разработан в компании Nissan отцом Skyline Шиничиро Сакураи. Главный инженер работал в компании Prince до того, как она была включена в состав Nissan, и принимал активное участие в разработке дикого R380. Он также был известен своим обращением со словами. Это касается его описания того, как он представлял HICAS.
Наганори Ито, человек, которого Сакураи выбрал своим преемником, однажды описал, чего его наставник хотел от системы HICAS:
«Основная философия Skyline — обеспечить надежность и выдающиеся ходовые качества. Идеал — это автомобиль, который абсолютно соответствует намерениям водителя. Это похоже на то, как лошадь и всадник становятся одним целым, когда всадник сидит на спине лошади, а лошадь движется. Лошадь создает толчок, отталкиваясь задними ногами и применяя крутящий момент, чтобы двигаться вперед. Это вполне естественно. Это хороший пример системы заднего привода в автомобилях. Но если вы понаблюдаете за движением лошади повнимательнее, то увидите, что она тоже отталкивается от земли передними ногами, а задними также контролирует направление своего движения. Чтобы воспроизвести это, автомобилям нужны полноприводные системы и системы управления четырьмя колесами. Это функции систем ATTESA и HICAS».
Идеал — это автомобиль, который абсолютно соответствует намерениям водителя. Это похоже на то, как лошадь и всадник становятся одним целым, когда всадник сидит на спине лошади, а лошадь движется. Лошадь создает толчок, отталкиваясь задними ногами и применяя крутящий момент, чтобы двигаться вперед. Это вполне естественно. Это хороший пример системы заднего привода в автомобилях. Но если вы понаблюдаете за движением лошади повнимательнее, то увидите, что она тоже отталкивается от земли передними ногами, а задними также контролирует направление своего движения. Чтобы воспроизвести это, автомобилям нужны полноприводные системы и системы управления четырьмя колесами. Это функции систем ATTESA и HICAS».
Nissan поясняет принцип работы HICAS следующим образом:
«В более ранних версиях HICAS для управления задними колесами использовалась гидравлика. Гидравлическая система приводилась в действие насосом гидроусилителя руля и использовала датчики скорости, чтобы определять, насколько и в каком направлении следует поворачивать задние колеса. Более поздние версии, получившие название Super HICAS, перешли на электрический привод задней рулевой рейки, что сделало систему намного легче. Super HICAS использует входные данные от датчика скорости и датчика угла поворота рулевого колеса через компьютер HICAS системы, чтобы определить, насколько быстро вы входите в поворот, и регулирует угол наклона задних колес в соответствии с условиями движения. Рулевое управление задними колесами HICAS и Super HICAS ограничено примерно одним градусом в любом направлении».
Более поздние версии, получившие название Super HICAS, перешли на электрический привод задней рулевой рейки, что сделало систему намного легче. Super HICAS использует входные данные от датчика скорости и датчика угла поворота рулевого колеса через компьютер HICAS системы, чтобы определить, насколько быстро вы входите в поворот, и регулирует угол наклона задних колес в соответствии с условиями движения. Рулевое управление задними колесами HICAS и Super HICAS ограничено примерно одним градусом в любом направлении».
В дополнение к Skylines модели Nissan 300ZX, 180SX и 240SX поколения Z32, а также Infiniti M35, M45, Q45 и Q37 также были оснащены HICAS и Super HICAS.
Мятный Prelude Si 4WS., Bring-a-TrailerHonda Prelude Si 4WS
Prelude Si 4WS — это не совсем то, что можно было бы ожидать от Honda в конце 1980-х. Если подумать, если учесть, что большая часть того периода была произведена Эскобаром неоновым светом, то горячий четырехдверный автомобиль эконом-класса с управлением всеми колесами имеет смысл в мире.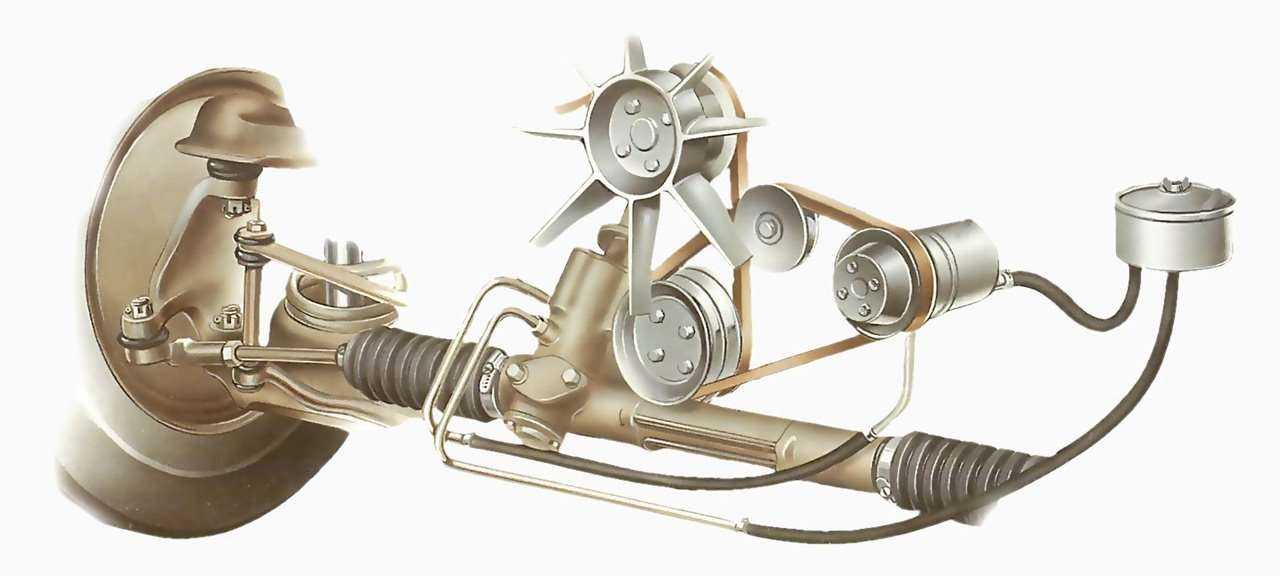
Основная идея системы управления четырьмя колесами Prelude Si 4WS исходила из желания Honda «вывести управляемость и маневренность автомобиля на новый уровень». Honda начала разработку системы 4WS для Prelude в 1977 году, в результате чего была создана система рулевого управления с четырьмя колесами, зависящая от угла поворота. Чисто механическая система управления четырьмя колесами Prelude использовала два рулевых редуктора, один спереди и один сзади, с центральным валом, механически связывающим их.
Как работает Prelude Si 4WS., HondaHonda прислала оригинальный пресс-релиз Prelude Si 4WS с подробным описанием работы системы.
«Когда водитель поворачивает руль, реечный механизм в переднем рулевом редукторе заставляет рейку двигаться вбок», — говорится в сообщении. «Этот ход рейки управляет передними колесами. В то же время он вращает выходной вал-шестерню через другую рейку и шестерню, расположенную внутри коробки передач. Этот выходной вал-шестерня передает вращение рулевого колеса на задний рулевой редуктор через центральный вал. Упорный стержень внутри заднего рулевого редуктора перемещается в осевом направлении, чтобы управлять задними колесами через рулевые тяги».
Упорный стержень внутри заднего рулевого редуктора перемещается в осевом направлении, чтобы управлять задними колесами через рулевые тяги».
То, как это работало по отношению к скорости автомобиля, еще более дико.
«При повороте рулевого колеса менее чем на 140 градусов от прямолинейного положения выходной ход перемещается в одном направлении», — говорится в релизе. «Для углов, превышающих этот, ход и относительное движение сзади постепенно и плавно уменьшаются и в конечном итоге поворачиваются в противоположном направлении. Таким образом, задний рулевой редуктор содержит механизм, который постепенно меняет направление выходного сигнала в зависимости от величины рулевого управления».
Honda добавляет: «Механически, когда рулевое колесо первоначально поворачивается от прямолинейного положения, задние колеса поворачиваются в том же направлении, что и передние колеса. Но когда усилие рулевого управления увеличивается и руль поворачивается больше, чем на заданную величину, примерно на 240 градусов, задние колеса начинают поворачиваться в противоположном направлении».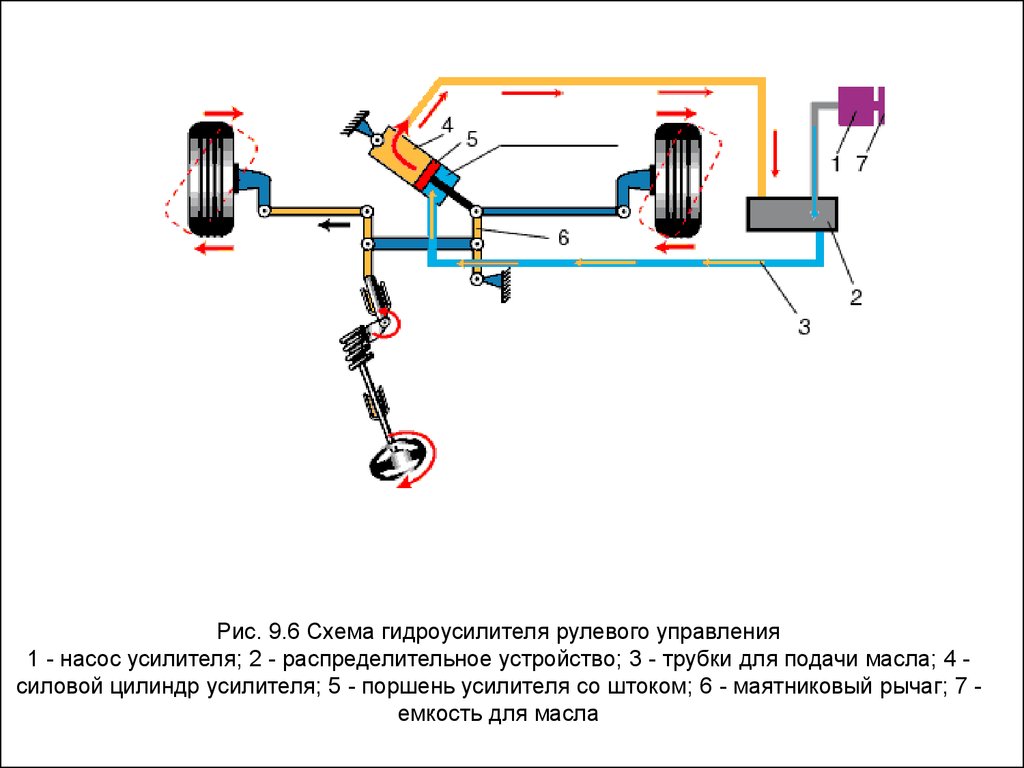
Когда Road & Track тестировал Prelude Si 4WS в 1987 году, он фактически превзошел Porsche и Ferrari в тесте на слалом. Система Honda 4WS в Prelude использовалась в следующих двух поколениях, хотя последнее поколение Prelude было вариантом только для Японии и только в моделях Si и SiR.
Период правильный., MitsubishiMitsubishi 3000GT VR-4/GTO
Хотя мы знаем только мощный Mitsubishi 3000GT VR-4 в Соединенных Штатах, его родословная GTO только для Японии может быть прослежена до Galant VR-4 и внедрение системы Mitsubishi Dynamic Four. В отличие от других здесь, Dynamic Four от Mitsubishi не была одиночной системой, она также включала полный привод, управление четырьмя колесами, независимую подвеску четырех колес и ABS на четыре колеса, отсюда и название.
Запущен в 1987, Galant VR-4 стал родоначальником не только 3000GT, но и всемогущего Lancer Evolution. И этот прототип раллийного автомобиля породил не только Dynamic Four, но и Active ECS для полноприводных моделей, первую активную систему подвески на рынке. Mitsubishi увидела в них две противоположные стороны одной медали и назвала зонт Active Footwork System, что является отличным названием для набора систем.
И этот прототип раллийного автомобиля породил не только Dynamic Four, но и Active ECS для полноприводных моделей, первую активную систему подвески на рынке. Mitsubishi увидела в них две противоположные стороны одной медали и назвала зонт Active Footwork System, что является отличным названием для набора систем.
Согласно оригинальному пресс-релизу Galant: «Система Active Footwork System, принятая на этот раз для Galant, является общим названием для Active Four (модели с полным приводом) и Active ECS (модели с приводом на два колеса), которые в основном состоят из из следующих систем подвески, чтобы создать больше места для движения от низких до высоких скоростей и облегчить вождение в эпоху высокой производительности. Это революционно новая система, которая дополнительно улучшает динамические характеристики автомобиля с точки зрения ускорения, прохождения поворотов и торможения за счет увеличения сцепления между каждой шиной и дорожным покрытием».
Что касается системы управления четырьмя колесами, согласно сообщению, это полностью гидравлическая система, чувствительная к скорости автомобиля и усилию на рулевом колесе для дальнейшего улучшения реакции рулевого управления в диапазоне средних и высоких скоростей.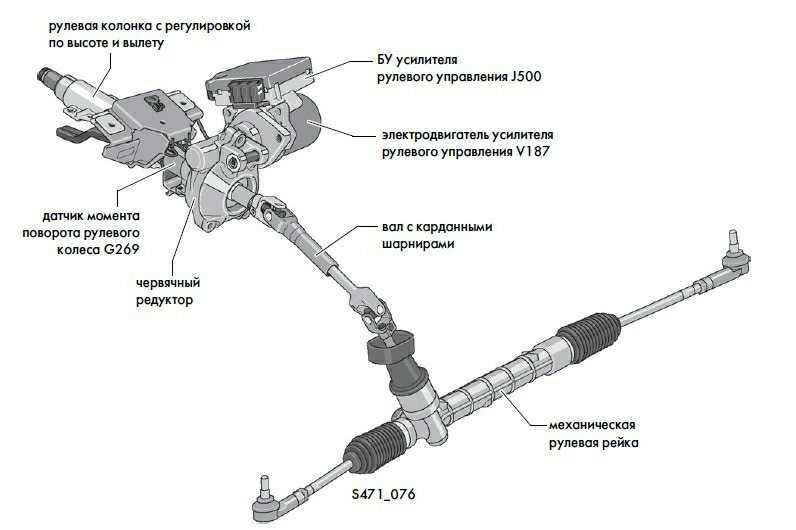 Как это работает, гидравлическое давление передается на шарниры продольных рычагов задней подвески до 1,5 градусов, хотя это зависит от усилия на рулевом колесе и скорости автомобиля более 50 км/ч.
Как это работает, гидравлическое давление передается на шарниры продольных рычагов задней подвески до 1,5 градусов, хотя это зависит от усилия на рулевом колесе и скорости автомобиля более 50 км/ч.
Три года спустя Mitsubishi представила модель 3000GT (GTO в Японии) с системой Active Footwork System и слоганом «GTO. Создан для того, чтобы водители с любым уровнем подготовки могли наслаждаться его высокими характеристиками — безопасно, с удовольствием и по своему вкусу».
Согласно оригинальному японскому пресс-релизу GTO, система управления четырьмя колесами работала следующим образом: «Гидравлический привод соединен с промежуточным шарниром на конце продольного рычага. Привод регулируется насосом управления задними колесами, соединенным с гидравлическим контуром усилителя передних колес, так что угол поворота задних колес пропорционален усилию управления передними колесами. Угол поворота задних колес пропорционален скорости автомобиля, потому что насос рулевого управления заднего колеса подает масло в количествах, соответствующих скорости вращения задних колес».
В сочетании с безнаддувным двигателем V-6 или двигателем V-6 с двойным турбонаддувом в 3000GT VR-4 спортивный автомобиль 2+2 был создан, чтобы конкурировать с Skyline GT-R, Supra и RX-7. , а также с активной аэродинамикой как спереди, так и сзади. Выпуск 3000GT/GTO также пришелся на период «джентльменского соглашения» для японских автомобилей с высокими характеристиками, что означало, что мощность автомобилей с высокими характеристиками была ограничена примерно 276 лошадиными силами, по крайней мере, на бумаге. Однако более точное число для 3000GT VR-4, вероятно, составляло 300-350 лошадиных сил.
Что интересно, хотя некоторые из этих систем были перенесены на недавно названную систему Super All-Wheel Control (S-AWC) для Mitsubishi Lancer Evolution, прямого потомка Galant VR-4, она не перенесла четырехколесная система управления — как и Pajero Evo.
QUADRASTEER TRUCK, BABY!, General MotorsGeneral Motors Quadrasteer
Quadrasteer от General Motors, безусловно, является чудаком в группе, но он заслуживает некоторого внимания как первое применение для полноразмерных пикапов. К несчастью для GM, это продлилось недолго.
К несчастью для GM, это продлилось недолго.
Грузовики в США — это большой бизнес. Это может быть преуменьшением десятилетия, но количество исследований и разработок, потраченных на то, чтобы превзойти конкурентов, просто дикое. Все на столе с точки зрения того, что производители могут предложить своим потребителям, чтобы переманить их от других марок и моделей. В 2002 году GM стала одержима идеей, что рулевое управление четырьмя колесами станет следующим большим достижением. Добро пожаловать в Quadrasteer.
В оригинальном выпуске новостей от 2002 года GM заявляет: «Дженерал Моторс стала лидером отрасли, впервые предложив систему управления четырьмя колесами Quadrasteer для полноразмерного грузовика. Инновационная система, делающая вождение грузовика более безопасным, легким и удобным, дебютирует на полноразмерном пикапе GMC Sierra Denali в четвертом квартале 2002 года. Quadrasteer знаменует собой веху в управлении и управлении полноразмерными грузовиками. Это электромеханическая система, которая поворачивает задние колеса Sierra Denali (до 12 градусов) по отношению к передним колесам, что обеспечивает беспрецедентную маневренность на низких скоростях и устойчивость на высоких скоростях».
В отличие от других систем управления четырьмя колесами, систему управления GM можно было выбрать, что позволяло использовать как обычное управление передними колесами, так и управление всеми четырьмя колесами. Наряду с этими режимами GM также включила режим буксировки с управлением четырьмя колесами, каждый из которых приводился в действие набором кнопок на приборной панели. Согласно этому выпуску, «Quadrasteer работает, определяя желаемое рулевое управление с помощью датчика положения рулевого колеса. Эта информация подается на микропроцессор, который определяет соответствующие углы наклона задних колес в зависимости от рулевого управления и скорости автомобиля. Микропроцессор передает свои данные электродвигателю, который на основе алгоритмов приводит в движение заднюю рулевую рейку через планетарную передачу. При обнаружении системного сбоя отказоустойчивые механизмы Quadrasteer возвращаются к управлению двумя колесами».
Несмотря на преимущества полного рулевого управления на полноразмерном грузовике, GM закрыла программу после 2005 года. Только GMC Sierra, Sierra Denali и Yukon, а также Chevrolet Silverado и Suburban могли быть оснащены Quadrasteer, который стоил 5600 долларов при запуске, хотя до того, как программа была свернута, эта сумма была снижена до 1000 долларов.
Только GMC Sierra, Sierra Denali и Yukon, а также Chevrolet Silverado и Suburban могли быть оснащены Quadrasteer, который стоил 5600 долларов при запуске, хотя до того, как программа была свернута, эта сумма была снижена до 1000 долларов.
Производители, которые в настоящее время предлагают управление четырьмя колесами в своих автомобилях
Как вы можете себе представить, учитывая преимущества управления задними колесами в тяжелых автомобилях, большинство производителей предлагают ту или иную форму управления задними колесами. Однако нет двух одинаковых систем, и они не имеют одинакового обозначения.
Чтобы лучше понять системы, вот производители, которые их предлагают, и как они называются.
Cadillac: Активное управление задними колесами
GMC: Crab Walk
Lamborghini: Lamborghini Управление задними колесами
Mercedes-Benz: Управление задними колесами
Acura: P-AWS (прецизионное управление всеми колесами)
1 BMW:1 Интегральное активное рулевое управление
Rolls-Royce: система управления задними колесами
«Маленький зеленый шарик — это двигатель рулевого управления», — представитель Porsche, Porsche Lexus: динамическое управление задними колесами
Genesis: Genesis управление задними колесами
Ferrari: виртуальная короткая колесная база
Audi: динамическое управление всеми колесами
Bentley: управление задними колесами Управление осью
Видео
Это одна из тем, которую лучше проиллюстрировать в виде видео, поскольку системы управления задними колесами представляют собой сложные технологические элементы.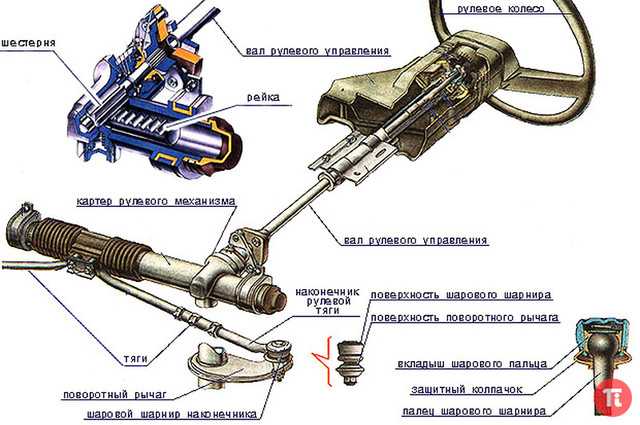 Вот один из них от нашего друга Джейсона Фенске из Engineering Explained.
Вот один из них от нашего друга Джейсона Фенске из Engineering Explained.
Часто задаваемые вопросы о системе управления четырьмя колесами
У вас есть вопросы. У Привода есть ответы.
В: В чем разница между полным приводом и полным приводом?
A: Полный привод — это когда мощность автомобиля может быть передана на все четыре колеса в той или иной степени. Рулевое управление всеми колесами — это система, которая позволяет вращать четыре колеса вашего автомобиля.
В: Моя система управления всеми колесами всегда включена?
Ответ: Есть.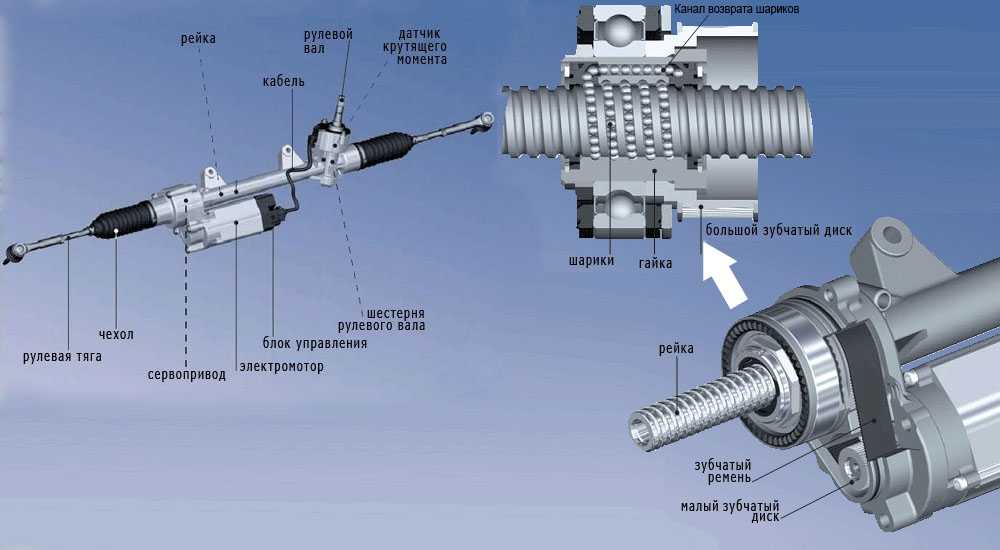 Эти системы повышают устойчивость и маневренность как на низких, так и на высоких скоростях, поэтому они всегда готовы помочь вашему автомобилю работать и работать. Рад.
Эти системы повышают устойчивость и маневренность как на низких, так и на высоких скоростях, поэтому они всегда готовы помочь вашему автомобилю работать и работать. Рад.
В: В какой машине впервые была установлена система управления всеми колесами?
A: Самая первая система управления четырьмя колесами была разработана в 1893 году британским инженером Джозефом Диплоком. Он запатентовал первый полный привод, систему управления четырьмя колесами, а также колесо pedrail.
Давайте поговорим: оставьте комментарий ниже и свяжитесь с гидами и редакторами Gear
Мы здесь, чтобы быть опытными гидами во всем, что связано с «как». Используйте нас, хвалите нас, кричите на нас. Комментарий ниже, и давайте поговорим. Вы также можете кричать на нас в Twitter или Instagram или связаться со всеми нами здесь: guidesandgear@thedrive.
Вот один из них от нашего друга Джейсона Фенске из Engineering Explained. Эти системы повышают устойчивость и маневренность как на низких, так и на высоких скоростях, поэтому они всегда готовы помочь вашему автомобилю работать и работать. Рад.