Функция Stop Go: как это работает?
Главная » В помощь водителю
Опубликовано: Рубрика: В помощь водителюАвтор: m-admin
Наличие системы Stop Go обеспечивает поддержание определенного скоростного режима в зависимости от условий, созданных на дороге.
Посредством её использования производится автоматическое определение расстояния до препятствия и при необходимости скорость передвижения опускается до нуля. В случае возобновления движения внутри транспортного потока система самостоятельно разгоняет автомобиль до определенного уровня.
Особенности работы функции Stop Go
С помощью такой опции значительно упрощается вождение транспортного средства в условиях езды по автомагистралям или шоссе. Наличие специальных датчиков производит определение расстояния до ближайшего препятствия. Данные элементы способны отслеживать ситуацию на дорожном отрезке, длина которого составляет до 150-ти метров. В случае обнаружения препятствия датчики дают сигнал двигателю о необходимости снижения мощности. При необходимости активируется работа тормозной системы, благодаря чему исключается вероятность столкновения с впереди идущей машиной.
Данные элементы способны отслеживать ситуацию на дорожном отрезке, длина которого составляет до 150-ти метров. В случае обнаружения препятствия датчики дают сигнал двигателю о необходимости снижения мощности. При необходимости активируется работа тормозной системы, благодаря чему исключается вероятность столкновения с впереди идущей машиной.
Возобновление движения производится за счет постепенного увеличения мощности силовой установки. Все эти операции производятся без непосредственного вмешательства водителя. При этом он может устанавливать минимальный и максимальный скоростной предел. В большинстве случаев эти показатели составляют 30 и 180 км/ч соответственно. Водителю предоставляется возможность использования четырех различных вариантов скоростного режима. Активация каждого из них производится посредством нажатия кнопки. При условии, если с момента полной остановки автомобиля прошло более трех секунд, то для возобновления движения возникает необходимость нажатия педали газа или кнопки, которой активируется Stop and Go.
Из чего состоит система Stop Go?
В качестве основных функциональных элементов выступают радары ближнего и дальнего обнаружения. Они функционируют по принципу эхолота и по этим признакам имеют много общего с работой традиционный парктроников. Дополнительно система Stop Go содержит в себе блок управления, который координирует функционирование данной опции.
Радары ближнего обнаружения расположены во внутренних боковых частях бампера. Датчики дальней идентификации находятся в правой части бампера. При необходимости можно провести кодировку и калибровку такого оборудования, вследствие чего его функциональные возможности будут расширены.
Дополнительные возможности
Активный круиз-контроль с функцией Stop Go имеет одну характерную особенность, которая заключается в том, что измерение расстояние до другого объекта производится в секундах. Таким образом водитель может вовремя среагировать и предпринять все меры, чтобы избежать столкновения. Эта система способна автоматически снижать скорость для более комфортного вхождения в поворот. Также она может различать машины, движущиеся в одной полосе движения.
Также она может различать машины, движущиеся в одной полосе движения.
0 3 781 просмотров
Режимы кинематики Stop&Go и непрерывной кинематики. Способы инициализации.
ГОУ ВПО СГГА
Геодезическое применение технологий ГНСС
Лекция 7
Методика спутниковых геодезических измерений. Режимы статики и быстрой статики. Режимы кинематики Stop&Go и непрерывной кинематики. Способы инициализации. Съемки в реальном времени RTS и RTK. Радиальный и последовательный методы сбора информации. Определение элементов приведения. Полевые контроли.
Методика спутниковых геодезических измерений. Режимы статики и быстрой статики.
В относительных статических определениях часто используют несколько базовых станций. Применяют три и более приёмников: два устанавливаются на опорных пунктах, координаты которых точно определены и увязаны между собой, а один или два — на вновь определяемых пунктах. Приёмниками засекается пять и более спутников. Измерения продолжаются, пока не будет выполнено разрешение неоднозначности, а число спутников и геометрия их расположения не обеспечат требуемую точность позицирования. Поэтому статические измерения должны быть заранее спроектированы с использованием альманаха, а пункты установки приёмников выбраны так, чтобы сигнал от спутников не блокировали здания, кроны деревьев, а металлические поверхности не создавали многолучевость.
В режиме статики используют постобработку и специальное ПО. При совместной обработке наблюдений с базовой и определяемой точек систематические погрешности, имеющие близкие и постоянные значения, в разностях, на которых основаны алгоритмы обработки, исключаются. К ним относятся: погрешности эфемерид и шкалы времени одного и того же спутника, погрешности тропосферных и ионосферных влияний. Следовательно, точность относительных определений будет выше, чем абсолютных.
К статическим методам относятся режимы быстрой статики и реокупации.
Быстрая статика применяется при коротких базовых линиях, а также при некотором снижении требований к точности. Например, координаты границ землепользования достаточно определить с СКП 0,1 м. В этих случаях продолжительность сеанса наблюдений сокращается до 20 минут и менее.
Реокупация — измерения, предполагающие возвращения и повторные наблюдения на данном пункте. Программа постобработки предусматривает совместную обработку данных приёмника, полученных в разное время на одном и том же пункте.
Метод «Stop and Go» («Стой — иди») использует также два приёмника: один неподвижный, а второй перемещается с краткими остановками для позицирования на определяемых пунктах. Особенность этого метода состоит в том, что оба приёмника непрерывно производят фазовые измерения, в том числе во время перемещения второго приемника. В конце серии измерений (в течение часа) проводят замыкание хода: подвижный приёмник возвращается в начальный пункт (реокупация), с которого начал измерение. Такая процедура непрерывного позицирования ускоряет инициализацию, измерения идут быстро, а замыкание обеспечивает контроль и некоторое повышение точности. Проводится совместная обработка файлов результатов позицирования обоими приёмниками.
Метод «Stop and Go» («Стой — иди») — вариант кинематического режима, предусматривающий кратковременную (для фиксирования нескольких эпох) остановку на точке, подлежащей определению, однако требующий, чтобы при перемещении от одной точки к другой сохранялась связь с не менее, чем 4-мя спутниками, в противном случае на этой точке не-обходимо оставаться до полного разрешения неоднозначности
Непрерывная кинематика – кинематический режим, используется как минимум 2 приемника, причем один из них находится в неподвижном состоянии, а второй – находится в движении, при этом измерения фиксируются через определенный (заданный пользователем) интервал. После обработки получается как бы линия, состоящая из множества точек.
Следует отметить, что точность методов с элементами кинематики ниже относительных статических определений. Однако она вполне удовлетворяет требованиям съёмок и межевания земель.
В настоящее время для быстрых измерений в геодезии применяются методы дифференциальных спутниковых определений. Они основаны на введении дифференциальных поправок, определяемых базовой станцией, в результаты измерений, выполненных на перемещающихся с пункта на пункт приёмниках. В основе дифференциальных методов лежит практическое постоянство основных систематических погрешностей измерений, выполненных на один и тот же спутник с близко расположенных пунктов. Эти систематические погрешности определяются на базовом пункте по измеренным псевдодальностям, его координатам и координатам спутника, по ним формируются дифференциальные поправки в измеренные в это же время псевдодальности на определяемом пункте.
Они основаны на введении дифференциальных поправок, определяемых базовой станцией, в результаты измерений, выполненных на перемещающихся с пункта на пункт приёмниках. В основе дифференциальных методов лежит практическое постоянство основных систематических погрешностей измерений, выполненных на один и тот же спутник с близко расположенных пунктов. Эти систематические погрешности определяются на базовом пункте по измеренным псевдодальностям, его координатам и координатам спутника, по ним формируются дифференциальные поправки в измеренные в это же время псевдодальности на определяемом пункте.
Все виды кинематической съемки требуют проведения инициализации.
Инициализация — процедура измерений для предварительного разрешения неоднозначности перед началом спутниковых определений в кинематическом режиме. Признаком завершения инициализации является приём сигналов от достаточного числа спутников, появление допустимого значения PDOP на дисплее контроллера. Инициализация выполняется в двухчастотных приёмниках в течение примерно 8 минут.
Двухчастотные приемники могут использовать преимущества новых алгоритмов, которые делают возможным проведение инициализации либо посредством очень короткого сеанса наблюдения в быстростатическом режиме, либо по известной точке, либо просто «on-the-fly» (OTF), то есть, в процессе движения. «Автоматическая Инициализация в Статическом Режиме» или «Автоматическая Инициализация в Процессе Движения,» как называются каждый из двух типов инициализаций возможны либо в реальном времени, либо в ходе последующей обработки данных. В каждом из этих случаев инициализация должна проводиться до обработки последовательных векторов.
Съемки в реальном времени RTS и RTK. На сегодняшний день, кинематика в реальном времени (RTK) – наиболее эффективный способ проведения топографических работ. Съемка в режиме GPS реального времени (RTK) широко используется во всем мире. Основные преимущества RTK это получение координат с сантиметровой точностью непосредственно во время выполнения съёмки и скорость выполнения измерений (составляет всего несколько секунд).
Основные преимущества RTK – это получение координат с высокой точностью непосредственно во время выполнения съемки. Время одного измерения составляет всего несколько секунд. Принципиальное отличие выполнения работ в режиме RTK состоит в отсутствии постобработки векторов и редактирования спутниковой информации.
Существует два основных способа выполнения съемки в режиме RTK: с помощью радиомодемов, используя радиочастоту, и с помощью GSM модемов, используя сотовую GSM связь.
В состав RTK системы входит базовая и передвижная станции, состоящие из GPS приёмников, антенн и радиомодемов. Базовая станция устанавливается на пункте с известными координатами. С помощью передвижных GPS приёмников выполняется съемка объектов. Для того, чтобы подвижный GPS приемник мог принимать спутниковую информацию от базовой станции, необходим комплект радиомодемов.
Технология выполнения работ в режиме RTK, с использованием технологии GSM (то есть мобильной связи), становится все более востребованной в геодезии. Этому способствуют чрезвычайно высокая эффективность съемки в режиме реального времени, значительно больший радиус действия базовой станции и постоянное снижение тарифов на услуги сотовой связи вместе с расширением зоны покрытия.
Преимущества:
1) Нет необходимости в получении разрешения ГРЧЦ на использование фиксированного номинала радиочастоты. Вы можете легально работать везде, где существует GSM покрытие.
2) Отсутствует необходимость в прямой радиовидимости между радиомодемами базовой и передвижной станциях, что позволяет значительно расширить район работ. Во время тестирования GSM RTK, в течение 15 секунд были выполнены измерения на пункте, удаленном от базы более чем 33 км. Для выполнения инициализации потребовалось всего лишь 15 секунд!
Основное применение кинематического режима измерений и обработки в реальном времени — это плановая и высотная съемки открытых территорий, создание локальных сетей сгущения на небольших удаленных объектах, вынос в натуру проектов.
Как работает функция остановки и движения на холостом ходу в автомобилях Kia
Главная Блог Особенности Kia Как работает функция Idle Stop and Go в автомобилях Kia29 января 2021 г., Энн Келли
Ваш Kia имеет множество функций, предназначенных для повышения вашей безопасности, комфорта и общего самодовольства, но он также имеет некоторые функции, которые помогут сохранить планету, а впоследствии и ваш кошелек, каждый раз, когда вы идете на заправочную станцию. . Одним из таких невоспетых героев экосистемы Kia является Idle Stop and Go.
Что такое Idle Stop and Go?
Мы все были там, ожидая движения транспорта — хотя бы немного — чтобы мы могли немного приблизиться к нашему выходу. Ужасные транспортные узлы случаются как в час пик, так и после него, оставляя, казалось бы, безграничные просторы автомобилей, которые просто без конца работают на холостом ходу, сжигая топливо и выбрасывая выбросы топлива в атмосферу. Конечно, вы можете немного помочь миру, выключив машину, пока ждете, но вам придется снова завести ее, чтобы проползти еще один фут по шоссе. Это может быть и утомительно, и опасно.
Это может быть и утомительно, и опасно.
Вот здесь-то и вступает в игру Idle Stop and Go.
Если ваш автомобиль оснащен функцией Idle Stop and Go (например, Kia Telluride 2021 года, Sorento, Seltos, Stinger, большинство Souls и некоторые модели K5), вам повезло! Вы можете часами стоять в пробке и платить только за то топливо, которое действительно движет вас вперед, когда задействована функция Idle Stop and Go. Когда вы сидите, ваша машина не сжигает бензин, поэтому никаких дополнительных расходов, никакого дополнительного загрязнения окружающей среды, не о чем беспокоиться, кроме времени, которое вы проводите на парковке, превращенной в шоссе.
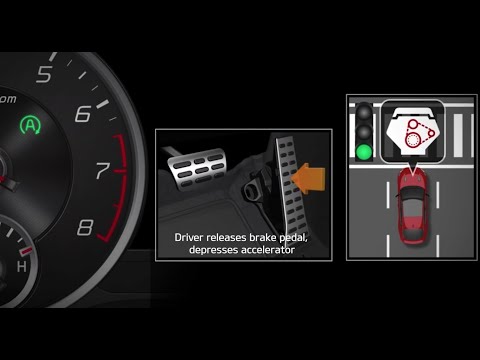
Как работает холостой ход
Система Idle Stop and Go подключена к нескольким датчикам в вашем автомобиле, которые могут определить, когда вы на самом деле остановились на светофоре или среди моря других автомобилей. Когда он действительно уверен, что вы полностью остановились, он выключает двигатель и переходит в своего рода режим мониторинга. Затем ваш автомобиль ждет, пока вы выполните одно из условий, которое говорит автомобилю перезапуститься из режима остановки на холостом ходу, включая вас:
Затем ваш автомобиль ждет, пока вы выполните одно из условий, которое говорит автомобилю перезапуститься из режима остановки на холостом ходу, включая вас:
- Отпускание педали тормоза
- Переключение автомобиля на задний ход или спортивный режим при нажатом тормозе
- Перевод автомобиля из нейтрального положения в положение движения
Idle Stop and Go активен по умолчанию при запуске вашего Kia, поэтому, если вы решите не использовать его, вам придется отключать его каждый раз, когда вы едете. Вы можете снова включить его, просто нажав кнопку или выключив зажигание. Вы найдете эту кнопку на центральной консоли в вашем Telluride, Sorento, K5 или Stinger. Он находится на панели водителя слева от руля на Soul и Seltos.
Световые индикаторы холостого хода
Система Idle Stop and Go сообщит вам, что она делает в течение всего времени работы, если вы обратите внимание на свою приборную панель. Разные цвета соответствуют разным уровням вовлеченности системы. В общем, вы можете ожидать, что светлые цвета будут означать следующее:
В общем, вы можете ожидать, что светлые цвета будут означать следующее:
- Зеленый. Двигатель был автоматически остановлен системой Idle Stop and Go и готов к повторному запуску при выполнении одного из перечисленных выше условий.
- Желтый/янтарный. Когда горит постоянно, это означает, что система включена, но по какой-то причине не работает. Это может быть связано с одним из многих факторов. Однако если он мигает, а светодиод кнопки ISG горит, автомобиль следует проверить в сервисной службе, так как это указывает на неисправность.
Почему Idle Stop and Go будет отключен?
Это справедливый вопрос. Многие люди не думают спрашивать об этом, пока не увидят свой первый горящий желтый индикатор. Вместо того, чтобы игнорировать проблему или бояться следующего счета за ремонт из-за индикатора на приборной панели, важно понять, что на самом деле означает желтый индикатор в этом случае.
Ваш автомобиль активно пытается защитить себя и гарантировать, что вы сможете перезапустить его каждый раз, поэтому, если аккумулятор слишком сильно нагружен или его заряд ниже 75 процентов от максимального, система Idle Stop and Go не будет работать. Проще говоря, вашему автомобилю нужно больше зарядить аккумулятор, прежде чем он сможет быть уверен, что сможет перезапуститься.
Проще говоря, вашему автомобилю нужно больше зарядить аккумулятор, прежде чем он сможет быть уверен, что сможет перезапуститься.
Многие различные условия могут привести к отключению системы Idle Stop and Go, но это общие причины:
- Ремень безопасности не пристегнут
- Капот или дверь открыта
- Включен передний или задний обогреватель
- Температура охлаждающей жидкости двигателя низкая
- Слишком низкая/высокая температура наружного воздуха
- Активация устройств контроля выбросов
- Автомобиль находится на крутом склоне
- Низкое рабочее давление в тормозной системе
- Кондиционер включен, вентиляторы на макс.
Вредит ли холостой ход вашей машине?
Функция Idle Stop and Go была предметом споров в последние несколько лет. Когда функция Idle Stop and Go была впервые популяризирована в США в 2010-х годах, казалось, что многие беспокоятся о том, что дополнительные циклы запуска могут увеличить износ вашего автомобиля. Трудно найти точные данные о том, имеет ли это утверждение право на существование, но производители, вероятно, закладывают в двигатель дополнительные циклы запуска, прежде чем внедрять эту функцию.
Трудно найти точные данные о том, имеет ли это утверждение право на существование, но производители, вероятно, закладывают в двигатель дополнительные циклы запуска, прежде чем внедрять эту функцию.
Система автомобиля рассмотрит несколько факторов, прежде чем активировать Stop and Go. Если аккумулятор вашего автомобиля уже разряжен или температура охлаждающей жидкости двигателя низкая, система не активируется. Ваш автомобиль настроен на самозащиту. Как и все в жизни, ничто не гарантировано, но использование функции «Остановка и движение на холостом ходу» вашего автомобиля не повредит вам в долгосрочной перспективе.
Можете ли вы выключить холостой ход?
Да! Существует возможность отключить функцию остановки и движения на холостом ходу вашего автомобиля, поэтому проверьте, что работает для вас. Кнопка находится в разных местах в зависимости от модели, но кнопка будет выглядеть как на картинке ниже.
Решение о том, полезна ли функция Idle Stop and Go, зависит от конкретного водителя. Если вы не уверены в этой функции, посмотрите, как выглядит ваш обычный диск. Также имеет значение, раздражает ли функция вас или вызывает путаницу. Во время вождения вам должно быть удобно и безопасно.
Если вы не уверены в этой функции, посмотрите, как выглядит ваш обычный диск. Также имеет значение, раздражает ли функция вас или вызывает путаницу. Во время вождения вам должно быть удобно и безопасно.
Idle Stop and Go: простой способ сэкономить деньги и бензин
Нет более простого способа сэкономить кучу денег, чем просто ничего не делать. Достаточно просто включить систему Idle Stop and Go в вашем Kia, чтобы сэкономить деньги, сэкономить бензин и одновременно помочь окружающей среде. Конечно, сколько вы сэкономите, будет зависеть от того, сколько вы ездите, и сколько из этого приходится на пробки с остановками, но если вы хотите помочь, абсолютно ничего не делая, обязательно спросите об этой функции перед покупкой вашего нового Kia. .
Опубликовано в: Kia Features
Tagged: kia idle stop and go, Kia stop go
У вас есть вопрос или идея, о которой вы хотели бы рассказать в блоге?
Заполните эту простую форму.
Вы автолюбитель или новичок и хотите рассказать о своей машине в нашем блоге?
Заполните эту форму, чтобы разместить ее в нашем блоге.
Режим Stop-and-Go: манипулирование датчиками так же важно, как и разработка датчиков в наземном лазерном сканировании
1. Гуарньери А., Милан Н., Ветторе А. Мониторинг сложной структуры для структурного контроля с использованием наземного лазерного сканирования (TLS) и фотограмметрии. Междунар. Дж. Архитектор Херит. 2013;7:54–67. [Google Scholar]
2. Хиремагалур Дж., Йен К.С., Ласки Т.А., Равани Б. Тестирование и оценка производительности стационарных наземных систем трехмерного лазерного сканирования для автомагистралей. Транспорт Рез. Рек. 2009; 2098: 29–40. [Google Scholar]
3. Чжэн Г., Москаль М., Ким С.Х. Получение индекса эффективной листовой поверхности в неоднородных лесах с помощью наземного лазерного сканирования. IEEE транс. Geosci. Рем. Sens. 2013; 51: 777–786. [Академия Google]
2013; 51: 777–786. [Академия Google]
4. Грэм Л. Обзор мобильных картографических систем. фотограмм. англ. Remote Sens. 2010; 76: 222–228. [Google Scholar]
5. Петри Г. Введение в технологии мобильных картографических систем. Геоинформатика. 2010;1–2:32–43. [Google Scholar]
6. Чжао Х., Шибасаки Р. Автомобильная городская система трехмерного сбора данных с использованием однорядных лазерных дальномеров. IEEE транс. Сист. Человек Киберн. Б Киберн. 2003; 33: 658–666. [PubMed] [Google Scholar]
7. Кукко А., Андрей К.О., Салминен В.М., Картинен Х., Чен Ю., Роннхольм П., Хююппа Х., Хююппа Дж., Чен Р., Хаггрин Х., Косонен И., Чапек К. Система картографирования дорожной среды Финского геодезического института — FGI Roamer. Междунар. Арка Фотограмма. Рем. Сенсорная пространственная информация. науч. 2007; 36: 241–247. [Академия Google]
8. Jaakkola A., Hyyppä J., Kukko A., Yu X., Kaartinen H., Lehtomäki M., Lin Y. Недорогая мультисенсорная мобильная картографическая система и ее возможности для измерения деревьев. ISPRS J. Photogramm. 2010;65:514–522. [Google Scholar]
ISPRS J. Photogramm. 2010;65:514–522. [Google Scholar]
9. Hyyppä J., Jaakkola A., Hyyppä H., Kaartinen H., Kukko A., Holopainen M., Zhu L., Vastaranta M., Kaasalainen S., Krooks A. и др. . Обновление карты и обнаружение изменений с помощью лазерного сканирования на транспортном средстве. Совместное мероприятие по дистанционному зондированию городов; Шанхай, Китай. 20–22 мая 2009 г.. [Google Scholar]
10. Асаи Т., Канбара М., Йокоя Н. 3D-моделирование наружной среды путем интеграции всенаправленного диапазона и цветных изображений. Материалы 5-й Международной конференции по цифровым 3D-изображениям и моделированию; Оттава, Онтарио, Канада. 13–16 июня 2005 г.; стр. 447–454. [Google Scholar]
11. Витце А. Марсоход вынужден достичь горной цели. Природа. 2013; 495: 292–293. [PubMed] [Google Scholar]
12. Нюхтер А., Лингеманн К., Герцберг Дж., Сурманн Х. Сопоставление лазерного сканирования на основе эвристики для наружного 6D SLAM. Материалы 28-й ежегодной немецкой конференции по искусственному интеллекту; Кобленц, Германия. 11–14 сентября 2005 г.; стр. 304–319. [Google Scholar]
11–14 сентября 2005 г.; стр. 304–319. [Google Scholar]
13. Лин Ю., Хююппя Дж., Кукко А., Яаккола А., Каартинен Х. Измерение высоты роста деревьев с помощью однократного сканирования с помощью бортового, статического наземного и мобильного лазерного сканирования. Датчики. 2012;12:12798–12813. [Бесплатная статья PMC] [PubMed] [Google Scholar]
14. Jones S. B.Sc. Тезис. Университет Южного Квинсленда; Тувумба, Квинсленд, Австралия: 2010 г. Мобильное картографирование Stop-Go. [Google Scholar]
15. Чой В., Рю С., Ким Х. Навигация мобильного робота с использованием моновидения и моноаудиона. Труды Международной конференции IEEE по системам, человеку и кибернетике; Токио, Япония. 12–15 октября 1999; стр. 686–691. [Google Scholar]
16. Дженсен Б., Вайнгартен Дж., Кольски С., Зигварт Р. Лазерная дальномерная визуализация с использованием мобильных роботов: от оценки положения до 3D-моделей. Материалы 1-го дня исследования изображений дальности; Цюрих, Швейцария. 8–9 сентября 2005 г.; стр. 129–144. [Google Scholar]
8–9 сентября 2005 г.; стр. 129–144. [Google Scholar]
17. Де ла Пуэнте Р., Родригес-Лосада Д., Валеро А., Матиа Ф. Трехмерное картографирование на основе признаков для повышения производительности мобильных роботов в спасательных миссиях. Материалы Международной конференции IEEE/RSJ по интеллектуальным роботам и системам; Сент-Луис, Миссури, США. 10–15 октября 2009 г.; стр. 1138–1143. [Google Scholar]
18. Хейккиля Р., Кивимяки Т., Микконен М., Ласки Т.А. Stop & Go Scanning for Highways — метод трехмерной калибровки для мобильной системы лазерного сканирования. Материалы 27-го Международного симпозиума по автоматизации и робототехнике в строительстве; Братислава, Словакия. 25–27 июня 2010 г.; стр. 40–48. [Google Scholar]
19. Elhabiby M., Teskey W.J.E. Бакалавр наук Тезис. Университет Южного Квинсленда; Тувумба, Квинсленд, Австралия: 2010 г. Непрерывное трехмерное лазерное сканирование и мобильное картографирование. [Академия Google]
20. Эль-Раббани Х. Введение в GPS (глобальную систему позиционирования): Введение. 2-й. Издательство «Артех Хаус»; Ромулус, Мичиган, США: 2006. стр. 1–189. [Google Scholar]
2-й. Издательство «Артех Хаус»; Ромулус, Мичиган, США: 2006. стр. 1–189. [Google Scholar]
21. Бесл П.Дж., Маккей Н. Метод регистрации трехмерных форм. IEEE транс. Анальный узор. Мах. Интел. 1992; 14: 239–256. [Google Scholar]
22. Чен Ю., Медиони Г. Моделирование объектов путем регистрации изображений нескольких диапазонов. Изображение Виз. вычисл. 1992; 10: 145–155. [Google Scholar]
23. Перволц К., Сурманн Х., Мэй С. Лазерный 3D-сканер для робототехнических систем телеразведки. Материалы международного семинара IEEE по робототехнике безопасности, охраны и спасения; Гейтерсберг, Мэриленд, США. 22–25 августа 2006 г. [Google Scholar]
24. Нюхтер А. Распараллеливание сопоставления сканов для роботизированного 3D-картографирования. Материалы 3-й Европейской конференции по мобильным роботам; Фрайбург, Германия. 19–21 сентября 2007 г. [Google Scholar]
25. Нюхтер А., Вульф О., Лингеманн К., Герцберг Дж., Вагнер Б., Сурманн Х. Трехмерное картографирование с использованием семантических знаний. Материалы Международного симпозиума RoboCup 2005; Осака, Япония. 8–10 мая 2005 г. [Google Scholar]
Материалы Международного симпозиума RoboCup 2005; Осака, Япония. 8–10 мая 2005 г. [Google Scholar]
26. Бентли Дж. Многомерные бинарные деревья поиска, используемые для ассоциативного поиска. Комм. АКМ. 1975;18:509–517. [Google Scholar]
27. Чмелина К., Янса Дж., Хесина Г., Тракслер С. Система трехмерного лазерного сканирования и метод обработки данных сканирования для мониторинга туннельных деформаций. Дж. Заявл. Геоды. 2012; 6: 177–185. [Google Scholar]
28. Пфеннигбауэр М., Ригер П., Студницка Н., Ульрих А. Обнаружение скрытых объектов с помощью мобильной системы лазерного сканирования. проц. ШПАЙ. 2009; 7323 doi: 10.1117/12.828293. [CrossRef] [Google Scholar]
29. Карлберг М. Быстрая реконструкция поверхности и сегментация с использованием наземных данных LiDAR. Калифорнийский университет; Беркли, Калифорния, США: 18 мая 2009 г.. [(по состоянию на 24 июня 2013 г.)]. Технический отчет № UCB/EECS-2009-66. Доступно в Интернете: http://www.eecs.berkeley. edu/Pubs/TechRpts/2009/EECS-2009-66.html [Google Scholar]
edu/Pubs/TechRpts/2009/EECS-2009-66.html [Google Scholar]
30. Вульф О., Аррас К., Кристенсен Х., Вагнер Б. , 2D-картографирование загроможденной внутренней среды с помощью 3D-восприятия. Материалы Международной конференции IEEE по робототехнике и автоматизации; Новый Орлеан, Лос-Анджелес, США. 18–22 апреля 2004 г.; стр. 4204–4209. [Google Scholar]
31. Вульф К., Нюхтер А., Герцберг Дж., Вагнер Б. Бенчмаркинг городского 6D SLAM. Материалы конспектов лекций для IROS 2007 Workshop III; Сан-Диего, Калифорния, США. 29Октябрь – 2 ноября 2007 г. [Google Scholar]
32. Вульф О., Нюхтер А., Герцберг Дж., Вагнер Б. Сравнительный анализ одновременной локализации и картографирования городов с шестью степенями свободы. Дж. Полевой робот. 2008; 25: 148–163. [Google Scholar]
33. Коул Д.М., Ньюман П.М. Использование данных лазерного диапазона для 3D SLAM на открытом воздухе. Материалы Международной конференции IEEE по робототехнике и автоматизации; Орландо, Флорида, США. 15–19 мая 2006 г.; стр. 1550–1563. [Google Scholar]
15–19 мая 2006 г.; стр. 1550–1563. [Google Scholar]
34. Трибель Р., Пфафф П., Бургард В. Многоуровневые карты поверхности для картирования местности на открытом воздухе и замыкания цикла. Материалы Международной конференции IEEE/RSJ по интеллектуальным системам; Пекин, Китай. 9–15 октября 2006 г.; стр. 4176–4182. [Google Scholar]
35. Frueh C., Zakhor A. Реконструкция 3D-моделей города путем слияния наземных и воздушных изображений. Материалы 8-го Международного семинара по VLBV; Мадрид, Испания. 18–19 сентября 2003 г.; стр. 306–313. [Google Scholar]
36. Kümmerle R., Steder B., Dronhege C., Kleiner A., Grisetti G., Burgard W. Крупномасштабный SLAM на основе графа с использованием аэрофотоснимков в качестве предварительной информации. Автон. Роботы. 2011;30:25–39. [Google Scholar]
37. Асаи Т., Канбара М., Ёкоя Н. 3D-моделирование уличных сцен путем интеграции режима остановки и непрерывного сканирования дальномера. Материалы совещания по распознаванию и пониманию изображений; Хиого, Япония. июль 2005 г.; стр. 1630–1631. [Академия Google]
июль 2005 г.; стр. 1630–1631. [Академия Google]
38. Лин Ю., Яаккола А., Хююппя Й., Каартинен Х. От TLS к VLS: оценка биомассы на уровне отдельных деревьев. Remote Sens. 2010; 2: 1864–1879. [Google Scholar]
39. Лин Ю., Хююппя Дж., Яаккола А. Объединение мобильных и стационарных наземных лазерных сканеров для исследования отдельных свойств кроны во время листообразования. Может. Дж. Рем. Sens. 2011; 37: 359–375. [Google Scholar]
40. Kaasalainen S., Kaartinen H., Kukko A., Anttila K., Krooks A. Применение мобильного лазерного сканирования при профилировании снежного покрова. Циосфера Обсудить. 2010;4:2513–2522. [Академия Google]
41. Lin Y., Hyyppä J. Обнаружение водопропускных труб на основе геометрии и интенсивности в мобильных облаках точек лазерного сканирования. Дж. Заявл. Remote Sens. 2010; 4 doi: 10.1117/1.3518442. [CrossRef] [Google Scholar]
42. Коломбо О.Л., Брункер С., Джонс Г., Янссен В., Ризос С. Тестирование субдециметрового кинематического широкозонного позиционирования для бортовых лидарных съемок с использованием сети CORSnet-NSW.