Устройство резонатора
Резонатор, устройство выхлопной системы автомобиля. Какую именно функцию выполняет и на что именно влияет работа резонатора?
Резонатор является частью системы глушителя автомобиля, поэтому есть мнение, что его основная функция – снижение уровня шума работы двигателя. Да, резонатор влияет и на это, но есть другие, не менее важные задачи. Резонатор отвечает за уменьшение сопротивления выхлопных газов при движении по выхлопной системе. Происходит это благодаря внутренней структуре устройства резонатора, при забивке которой автомобиль начинает работать в аварийном режиме.
В результате отмечается снижение мощности работы двигателя, повышается расход топлива, усиливается вибрация кузова, и, конечно же, повышается шум рабочего двигателя. Принятие решения о самостоятельном удалении резонатора и замене его просто частью трубы только усугубляет проблему. Полая труба не сможет справиться со сглаживанием колебаний, образующихся при сгорании топлива, не понизит температуру выбрасываемого газа, все это повлечет скорейший износ более дорогих деталей автомобиля.
Иногда резонатор удаляют и вместо него как раз монтируют трубу, но делать это должен профессиональный мастер после проведения определенных расчетов для каждого автомобиля индивидуально. Ведь кроме повышения шума, нарушается и состав выбрасываемого в атмосферу газа, это может стать причиной отказа при прохождении ТО.
Устройство резонатора и принципы работы
Резонатор представляет собой цилиндрический корпус, внутри которого размешается система перегородок с нанесенной перфорацией. Работа устройства заключается в следующем:
Резонатор представляет собой цилиндрический корпус, внутри которого размешается система перегородок с нанесенной перфорацией.- Изменение колебания потока выбрасываемых газов. Амплитуда колебаний увеличивается, соответственно их частота уменьшается, это достигается созданием камер разного размера, нанесением перфорации на стенки, образующие препятствия для прохождения выхлопных газов по устройству. Это гасит интенсивность звуковых волн.
- Камеры, расположенные внутри корпуса резонатора расширяют и сужают поток газов во время прохождения через устройство.

- Трубки и преграды, расположенные внутри корпуса резонатора гасят пульсации высоких и средних частот, образующиеся в результате сгорания топлива. Достигается это опять же при помощи сложной внутренней структуры устройства.
- Проникая через отверстия перфорации в трубках, расположенных внутри резонатора, выхлопные газы скапливаются, и в какой-то момент стравливаются.
Некоторые виды резонаторов делятся на внутренние камеры, каждая выполняет свою функцию. Например, последняя камера изготавливается из материала, который обладает звукоизоляционными свойствами, для гашения интенсивности звуковых волн работы системы ДВС.
Внешний корпус устройства чаще всего изготавливается из нержавейки, или, более дешевый вариант – стали с нанесением слоя алюминия, защищающего резонатор от коррозии. Резонаторы, выполненные из нержавеющей стали более устойчивы к коррозии, но из-за высокой стоимости устанавливаются не на все современные автомобили.
Устройство прямоточного резонатора
Прямоточный резонатор является разновидностью резонатора, еще его называют спортивным. Этот вид устройства имеет другую внутреннюю структуру – камеры внутри корпуса резонатора отсутствуют, сопротивления при движении не возникает. Это приводи к тому, что выхлопные газы, проходя через резонатор, не меняют направления, пульсации выхлопа не сглаживаются, звук работы систем автомобиля не гасится.
Этот вид устройства имеет другую внутреннюю структуру – камеры внутри корпуса резонатора отсутствуют, сопротивления при движении не возникает. Это приводи к тому, что выхлопные газы, проходя через резонатор, не меняют направления, пульсации выхлопа не сглаживаются, звук работы систем автомобиля не гасится.
Прямоточный резонатор не монтируется заводом-изготовителем авто. Как правило, им заменяют «родной» резонатор при тюнинге системы глушителя. Учитывая все аспекты работы резонатора и работу всех устройств, на которые он оказывает влияние, такую замену необходимо производить очень осторожно и только у профессионалов. Некачественная замена, подбор резонатора, не отвечающего требованиям автомобиля, может повлечь за собой ремонт других систем, негативно сказаться на комфорте автомобиля.
Резонатор. Устройство резонатора (среднего глушителя)
- Диагностика и неисправности резонатора
- Замена резонатора
- Ремонт резонатора
- Удаление резонатора
Первый, промежуточный, средний глушитель — как только не называют этот компонент выхлопной системы.
Назначение, принцип работы и устройство резонатора
Если спросить любого мало-мальски разбирающегося в устройстве машины автомобилиста о назначении резонатора, он ответит, что данный элемент обеспечивает уменьшение уровня шума. В принципе, такое утверждение верно. Но большинство из нас не подозревают, что у этого компонента выхлопной системы есть и другие функции. Помимо уменьшения звука резонатор отвечает и за уменьшение сопротивления системы движению выхлопных газов (и происходит это за счет сглаживание пульсаций). Подтверждением этому является тот факт, что выхлопная система без резонатора на многих автомобилях работает не совсем корректно. Само-собой повышается шумность, а вместе с этим многие автомобилисты, кто решился на необдуманный шаг и самовольно удалили резонатор, заменив его отрезком трубы, жалуются на то, что авто не держит обороты ХХ.
Как устроен и работает резонатор
Работа данного элемента основана на следующих физических процессах:
- Расширение и сужение потока выхлопных газов. Это обеспечивается за счет использования нескольких камер в рассматриваемом элементе.
- Гашение средне- и высокочастотных пульсаций. Выхлопные резонаторы для автомобилей имеют для этого внутри трубопроводы, размещающиеся со смещением относительно друг друга.

- Интерференция звуковых волн. За счет этого происходит увеличение суммарной амплитуды, а, следовательно — уменьшение частоты колебаний. Добиваются этого за счет использования камер разного объема, а также при помощи перфорационных отверстий на трубах внутри резонатора.
- Использование закрытых камер, в которых накапливаются газы. Поступая через перфорационные отверстия газы стравливаются в определенный момент времени.
Также, в зависимости от конструкции, средняя часть глушителя (или резонатор) может иметь несколько камер. Последняя, для уменьшения шумности, может производиться с использованием специального звукоизоляционного материала. Что касается корпуса, оригинальный или универсальный резонатор выхлопной системы может выпускаться из нержавеющей стали, или так называемой алюминиевой стали (покрытой слоем алюминия для защиты от коррозии). Первый вариант — более дорогостоящий, но он характеризуется лучшими показателями устойчивости к коррозии.
Прямоточный резонатор
Одной из разновидностью рассматриваемого элемента выхлопной системы является прямоточный (или спортивный) резонатор. Его отличие от «обычного» заключается в том, что здесь имеет место более низкое обратное сопротивление. И получается оно в ущерб сглаживанию пульсаций и уменьшению звука. Такой резонатор, как правило, не имеет камер и не изменяет направление движения потока выхлопных газов. По сути это — ровный «тоннель», имеющий перфорированные стенки. А это значит что, учитывая рассмотренные выше проблемы, которые могут быть вызваны пульсациями, выбирать такой элемент для своего авто нужно очень тщательно. А лучше доверьте это дело профессионалам. Итак, мы разобрались, для чего нужен резонатор и как он работает. Если вам нужен ремонт или замена данного элемента (в том числе и установка прямоточного), обращайтесь к специалистам GSAvto.
Безакустический поверхностный фононный кристаллический резонатор для малошумящего гравиметрического детектирования в жидкости
%PDF-1. 4
%
1 0 объект
>
эндообъект
2 0 объект
>поток
application/pdfdoi:10.1038/s41378-020-00236-9
4
%
1 0 объект
>
эндообъект
2 0 объект
>поток
application/pdfdoi:10.1038/s41378-020-00236-9
 3.5 ©2000-2012 1T3XT BVBA (SPRINGER SBM ; лицензионная версия)VoRuuid:07166475-354f-4bf0-871b-a22bc248cadbuuid:653af1ac-d950-48db-9d44-b94fe8985d01default1
3.5 ©2000-2012 1T3XT BVBA (SPRINGER SBM ; лицензионная версия)VoRuuid:07166475-354f-4bf0-871b-a22bc248cadbuuid:653af1ac-d950-48db-9d44-b94fe8985d01default1 adobe.com/xap/1.0/mm/xmpMMXMP Схема управления мультимедиа
adobe.com/xap/1.0/mm/xmpMMXMP Схема управления мультимедиа MajorVersionDateText
MajorVersionDateText Если в качестве требуемого dc:identifier используется альтернативный уникальный идентификатор, то DOI следует указывать как голый идентификатор только в пределах prism:doi.
Если необходимо указать URL-адрес, связанный с DOI, то prism:url может использоваться вместе с prism:doi для предоставления конечной точки службы (т. е. URL-адреса).
текст
Если в качестве требуемого dc:identifier используется альтернативный уникальный идентификатор, то DOI следует указывать как голый идентификатор только в пределах prism:doi.
Если необходимо указать URL-адрес, связанный с DOI, то prism:url может использоваться вместе с prism:doi для предоставления конечной точки службы (т. е. URL-адреса).
текст Примечание. Название публикации можно использовать, чтобы различать печатный журнал и онлайн-версию, если названия различаются, например «magazine» и «magazine.com».
публикацияNameText
Примечание. Название публикации можно использовать, чтобы различать печатный журнал и онлайн-версию, если названия различаются, например «magazine» и «magazine.com».
публикацияNameText ORCID — это постоянный идентификатор (непатентованный буквенно-цифровой код), позволяющий однозначно идентифицировать научных и других академических авторов. authorInfoBag AuthorInformation
ORCID — это постоянный идентификатор (непатентованный буквенно-цифровой код), позволяющий однозначно идентифицировать научных и других академических авторов. authorInfoBag AuthorInformationФотоакустический датчик с ультразвуковым датчиком с микрокольцевым резонатором для эндоскопических применений
Opt Lett. Авторская рукопись; доступно в PMC 2015 4 сентября. 2014 1 августа; 39(15): 4372–4375.
Авторская рукопись; доступно в PMC 2015 4 сентября. 2014 1 августа; 39(15): 4372–4375.
PMCID: PMC4560527
NIHMSID: NIHMS718928
PMID: 25078180
90 002, 1, 2 , 1 , 2 , 2 и 1, *Информация об авторе Информация об авторских правах и лицензиях Отказ от ответственности
Мы разработали полностью оптический фотоакустический зонд для эндоскопических исследований с использованием оптически прозрачного полимерного микрокольцевого резонатора типа покровного стекла ультразвукового исследования. датчик. Мы экспериментально определили осевое, тангенциальное и радиальное разрешение и угловую чувствительную стабильность этого зонда. С помощью этого зонда мы получили объемное изображение нескольких фантомов. Наша полностью оптическая конструкция зонда предлагает очевидные преимущества интеграции фотоакустического эндоскопа с другими методами оптической эндоскопической визуализации, что облегчает переход от настольного к прикроватному.
Фотоакустическая (ФА) эндоскопия является привлекательным новым эндоскопическим методом благодаря возможности проведения фотоакустической микроскопии (ПАМ) в полых органах неинвазивно или минимально инвазивно. В качестве новой технологии визуализации без меток PAM предлагает беспрецедентную чувствительность к контрасту оптического поглощения с физиологически значимой информацией [1,2], например. метаболизм кислорода [3–5] и прогрессирование опухоли [6] при пространственном разрешении, ограниченном дифракцией. Современные эндоскопические датчики PA в основном используют обычные пьезоэлектрические преобразователи [7–12], что накладывает ряд ограничений. Во-первых, непрозрачность пьезоэлектрических преобразователей требует некоторых компромиссов в тонкой оптической конструкции эндоскопических систем, что обычно приводит к ухудшению пространственного разрешения и громоздкости. Во-вторых, чувствительность и диапазон частот обнаружения пьезоэлектрических преобразователей могут быть ограничены из-за миниатюризации [13], что приводит к уменьшению отношения сигнал/шум (SNR) и радиального разрешения. Хотя пьезоэлектрические преобразователи на основе прозрачного оксида индия и олова были разработаны для преодоления вышеуказанных ограничений [14, 15], их полоса пропускания сильно ограничена и недостаточна для визуализации PA с высоким разрешением.
Хотя пьезоэлектрические преобразователи на основе прозрачного оксида индия и олова были разработаны для преодоления вышеуказанных ограничений [14, 15], их полоса пропускания сильно ограничена и недостаточна для визуализации PA с высоким разрешением.
Напротив, методы оптического ультразвукового обнаружения предлагают желаемые решения для вышеупомянутых ограничений в эндоскопических приложениях. Несколько прототипов на основе интегрированной фотоники, такие как интерферометр внутреннего оптического волокна [16], волноводный интерферометр Маха-Цендера [17] и резонаторы Фабри-Перо [18], были представлены в эндоскопии PA. Недавно мы разработали полностью оптический эндоскопический датчик PA с использованием оптически прозрачного ультразвукового датчика с микрокольцевым резонатором (MRR) для PAM [19], который демонстрирует уникальные преимущества для эндоскопических приложений. Во-первых, MRR на основе оптически прозрачного волокна вносит минимальные помехи в существующую оптическую систему. Во-вторых, высокочувствительное обнаружение ультразвука может быть достигнуто за счет модуляции эффективной длины оптического пути и увеличения более чем в тысячу раз за счет оптического резонанса. В-третьих, MRR предлагает значительно более широкую полосу ультразвукового обнаружения, что впоследствии улучшает радиальное разрешение при объемной визуализации и предел насыщения при функциональной фотоакустической визуализации [17,20].
Во-вторых, высокочувствительное обнаружение ультразвука может быть достигнуто за счет модуляции эффективной длины оптического пути и увеличения более чем в тысячу раз за счет оптического резонанса. В-третьих, MRR предлагает значительно более широкую полосу ультразвукового обнаружения, что впоследствии улучшает радиальное разрешение при объемной визуализации и предел насыщения при функциональной фотоакустической визуализации [17,20].
В этом письме мы продемонстрировали возможность интеграции ультразвукового датчика MRR в компактный датчик для 3D PA эндоскопии. Осевое, тангенциальное и радиальное разрешение нашего ФР-зонда могут достигать 16,0 мкм, 15,7 мкм и 4,5 мкм соответственно. Стабильность чувствительности при угловом сканировании также была охарактеризована экспериментально, что указывает на хорошую стабильность не менее чем на 180 градусов. Наконец, было выполнено объемное 3D-изображение нескольких фантомов, изготовленных по индивидуальному заказу, чтобы продемонстрировать потенциальные возможности зонда для визуализации PA в ткани.
показывает конструкцию и принцип работы эндоскопического зонда PA. представляет собой фотографию полностью упакованного зонда и схему конструкции зонда. Мы использовали линзу с градиентным индексом (GRIN) для фокусировки PA, освещающего свет, выходящий из одномодового оптического волокна (числовая апертура: 0,22). К концу линзы GRIN была прикреплена призма для освещения бокового обзора. Затем мы приклеили ультразвуковой датчик MRR на сторону призмы, используя УФ-отверждаемую смолу, и тщательно выровняли MRR, чтобы он был концентричен с оптическим освещающим лучом.
Открыть в отдельном окне
(В цвете онлайн) (а) Фотография эндоскопического датчика ПА на основе МРТ. Внешний диаметр 4,5 мм. Бар: 5 мм. (b) Изображение зонда внутри пунктирного квадрата на панели a. (c) Фотография упакованных MRR. Пруток: 200 мкм. (d) Типичный спектр передачи MRR. T: нормированное пропускание, λ: длина волны. Пунктирная линия указывает рабочую длину волны MRR при 771,46 нм, где dT/dλ максимально.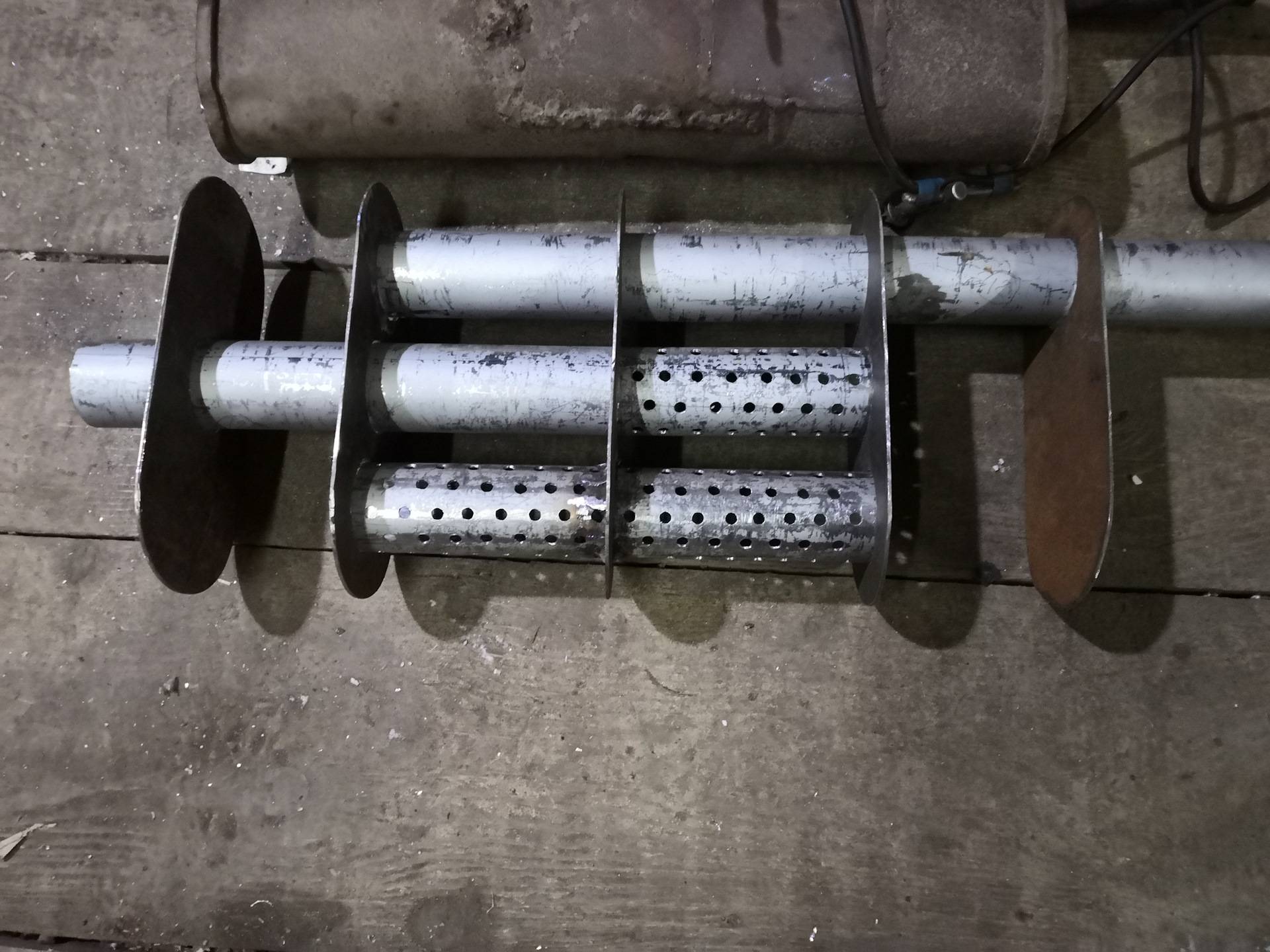
Детали ультразвукового датчика MRR показаны на . Полимерные МРР с U-образными шинными волноводами были изготовлены на покровном стекле микроскопа из плавленого кварца толщиной 250 мкм с использованием электронно-лучевой литографии и тщательно нарезаны кубиками до размеров 2×2 мм 9 .0121 2 . Оптический волновод из СУ-8 имеет поперечное сечение квадратной формы с длиной стороны 800 нм [18]. Как входной, так и выходной концы волновода шины были точно сколоты для соединения волокон. Одномодовое волокно с сохранением поляризации (PM) использовалось для передачи волны поперечной магнитной моды от узкополосного перестраиваемого лазера (765–780 нм, TLB-6712, New Focus) в шинный волновод и многомодового ( MM) волокно использовалось для сбора прошедшего света с другого конца волновода. Направляемая световая волна внутри волновода-шины мимолетно вводилась в кольцевой волновод через зазор с низкой диэлектрической проницаемостью между шиной и кольцевыми волноводами. Свет, циркулирующий внутри кольцевого волновода, приводил к сильному оптическому резонансу, который можно охарактеризовать узким провалом в спектре пропускания из-за деструктивной интерференции [] между светами в двух волноводах. Предполагая, что λ r — резонансная длина волны, нулевое пропускание на λ r может быть достигнуто, когда собственные потери кольцевого резонатора совпадают с потерями связи, что обычно называют критическим условием связи. Q -фактор MRR можно рассчитать как λ r /Δλ, где Δλ — полувысота полной ширины резонансного провала. Практически было изготовлено пять MRR с различными размерами зазора с расположением, показанным на рис., и экспериментально выбрано одно с критической связью для использования в зонде. Измеренный спектр пропускания [] указывает на Q — фактор 4820. Оптимальная чувствительность обнаружения при максимальном dT/dλ составляет 10,5 при 771,46 нм, которая была выбрана в качестве рабочей длины волны МРР.
Предполагая, что λ r — резонансная длина волны, нулевое пропускание на λ r может быть достигнуто, когда собственные потери кольцевого резонатора совпадают с потерями связи, что обычно называют критическим условием связи. Q -фактор MRR можно рассчитать как λ r /Δλ, где Δλ — полувысота полной ширины резонансного провала. Практически было изготовлено пять MRR с различными размерами зазора с расположением, показанным на рис., и экспериментально выбрано одно с критической связью для использования в зонде. Измеренный спектр пропускания [] указывает на Q — фактор 4820. Оптимальная чувствительность обнаружения при максимальном dT/dλ составляет 10,5 при 771,46 нм, которая была выбрана в качестве рабочей длины волны МРР.
Мы сконструировали механическую сканирующую эндоскопическую систему визуализации, чтобы охарактеризовать характеристики нашего ФР-зонда и продемонстрировать его способность к объемной ФАР-визуализации.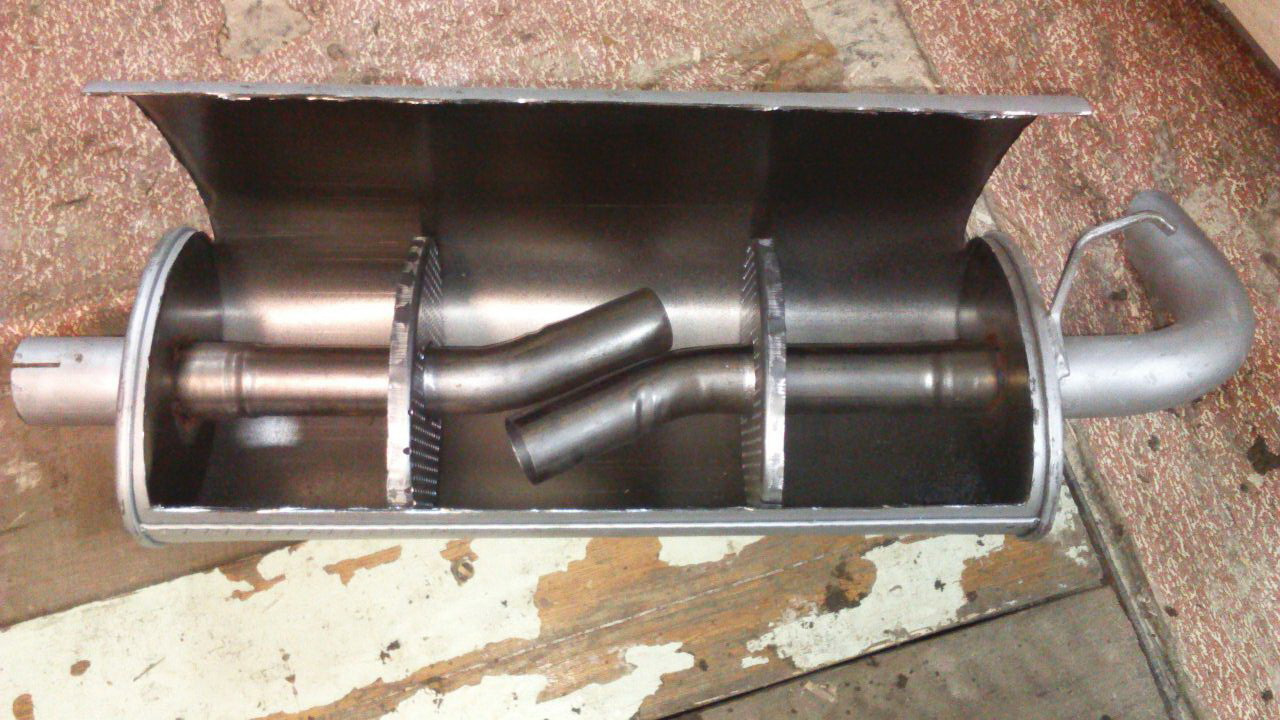 Как показано на рисунке, короткоимпульсный лазер (SPOT, Elforlight Ltd.; длина волны: 532 нм, длительность импульса: 1 нс) был соединен с одномодовым волокном и сфокусирован на образце через эндоскопический зонд. Поглощенная лазерная энергия приводила к нестационарному термоупругому расширению образца и впоследствии запускала ультразвуковые волны с широким диапазоном частотных составляющих. Ультразвуковое давление вызывало изменение как размера, так и показателя преломления полимерного волновода. Эти изменения в совокупности изменили длину оптического пути кольцевого резонатора и, таким образом, вызвали сдвиг резонансной частоты. Сдвиг резонансной частоты измерялся фотодетектором как модуляция напряжения в передаваемом оптическом сигнале. Мы использовали фотодетектор с низким уровнем шума и высокой чувствительностью (APD210, Menlo System; полоса пропускания: 5 МГц – 1 ГГц) для регистрации прошедшего света через шинный волновод. Обнаруженные сигналы дополнительно усиливались на 12 дБ (FL500NL+, мини-схемы; полоса пропускания: 10–500 МГц) и оцифровывались с помощью высокоскоростного дигитайзера (CobraMax, GaGe; частота дискретизации: 3 Гвыб.
Как показано на рисунке, короткоимпульсный лазер (SPOT, Elforlight Ltd.; длина волны: 532 нм, длительность импульса: 1 нс) был соединен с одномодовым волокном и сфокусирован на образце через эндоскопический зонд. Поглощенная лазерная энергия приводила к нестационарному термоупругому расширению образца и впоследствии запускала ультразвуковые волны с широким диапазоном частотных составляющих. Ультразвуковое давление вызывало изменение как размера, так и показателя преломления полимерного волновода. Эти изменения в совокупности изменили длину оптического пути кольцевого резонатора и, таким образом, вызвали сдвиг резонансной частоты. Сдвиг резонансной частоты измерялся фотодетектором как модуляция напряжения в передаваемом оптическом сигнале. Мы использовали фотодетектор с низким уровнем шума и высокой чувствительностью (APD210, Menlo System; полоса пропускания: 5 МГц – 1 ГГц) для регистрации прошедшего света через шинный волновод. Обнаруженные сигналы дополнительно усиливались на 12 дБ (FL500NL+, мини-схемы; полоса пропускания: 10–500 МГц) и оцифровывались с помощью высокоскоростного дигитайзера (CobraMax, GaGe; частота дискретизации: 3 Гвыб.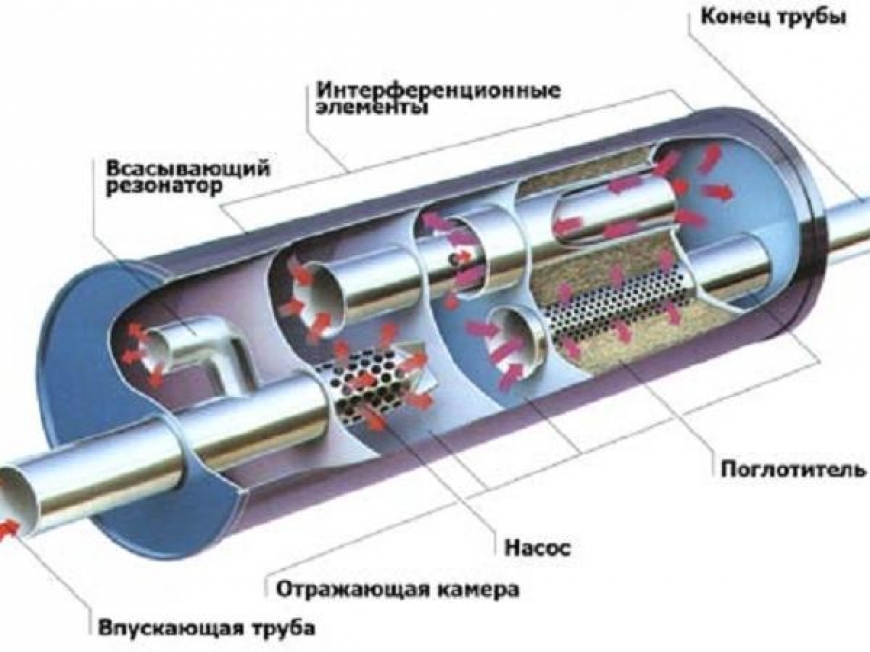 /с, полоса пропускания: 1,5 ГГц). . Каждый сигнал PA с временным разрешением затем преобразовывался в A-линию с разрешением по глубине после преобразования Гильберта. А-линии, собранные при круговом сканировании, были дополнительно преобразованы из полярных координат в декартовы координаты с использованием тригонометрических функций, чтобы восстановить фактическую геометрию исследуемого образца.
/с, полоса пропускания: 1,5 ГГц). . Каждый сигнал PA с временным разрешением затем преобразовывался в A-линию с разрешением по глубине после преобразования Гильберта. А-линии, собранные при круговом сканировании, были дополнительно преобразованы из полярных координат в декартовы координаты с использованием тригонометрических функций, чтобы восстановить фактическую геометрию исследуемого образца.
Открыть в отдельном окне
(В цвете онлайн) Схема системы эндоскопической визуализации PA на основе МРТ. APD: лавинный фотодиод; AMP: усилитель.
На основе вышеупомянутой экспериментальной установки ультразвуковой датчик MRR обеспечивает чувствительность 1,1 В/МПа [17]. Уровень шума, непосредственно измеренный по сигналу временного разрешения, составляет 0,32 мВ, что соответствует шумовому эквивалентному давлению (NEP) 35,2 Па. NEP ультразвукового датчика MRR на несколько порядков лучше, чем у обычных пьезоэлектрических преобразователей сравнимых размеров, и он сравним с лучшими из известных оптических детекторов.
Эндоскопический зонд устанавливался на самодельный вал, который приводился в движение шаговым двигателем для кругового секторного сканирования (В-скан) с размером шага 0,1125 градуса. Второй линейный моторизованный столик использовался для перемещения зонда с шагом 0,625 мкм в осевом направлении, что завершало двухмерное тангенциально-аксиальное сканирование для объемной визуализации. показывает экспериментально определенное пространственное разрешение эндоскопического зонда. Функция осевого рассеяния края (ESF) была записана путем линейного сканирования края куска черной ленты [], а соответствующая функция рассеяния линии (LSF) была рассчитана путем взятия первой производной ESF [], предполагая, что осевое разрешение составляет 16,0 мкм. Тангенциальный ESF показан на , а соответствующий ему LSF показан на , что указывает на тангенциальное разрешение 0,4 градуса, которое можно преобразовать в 15,7 мкм, когда радиус сканирования изображения составляет 2,25 мм. Обнаруженная импульсная характеристика УМ с временным разрешением, показанная на рис. , указывает полосу пропускания более 250 МГц после выполнения преобразования Фурье сигнала во временной области. Радиальное разрешение можно оценить путем численного сдвига и суммирования двух импульсных характеристик, а затем оценки огибающей, обеспечиваемой преобразованием Гильберта [21]. Как показано на рисунке, отношение контраста к шуму (CNR) было построено в зависимости от расстояния сдвига между двумя импульсными характеристиками, а контраст был определен как разница между пиками и впадинами в огибающей PA. Если учесть, что два пика можно различить, когда CNR оболочки достигает 6 дБ, наш эндоскоп на основе MRR может легко достичь осевого разрешения менее 10 мкм (до 4,5 мкм). Хотя аксиальное, тангенциальное и радиальное разрешение были определены количественно в идеальных условиях, они должны обеспечить хорошие оценки реальных характеристик датчика при визуализации тканей при наличии ультразвукового и оптического рассеяния и затухания.
, указывает полосу пропускания более 250 МГц после выполнения преобразования Фурье сигнала во временной области. Радиальное разрешение можно оценить путем численного сдвига и суммирования двух импульсных характеристик, а затем оценки огибающей, обеспечиваемой преобразованием Гильберта [21]. Как показано на рисунке, отношение контраста к шуму (CNR) было построено в зависимости от расстояния сдвига между двумя импульсными характеристиками, а контраст был определен как разница между пиками и впадинами в огибающей PA. Если учесть, что два пика можно различить, когда CNR оболочки достигает 6 дБ, наш эндоскоп на основе MRR может легко достичь осевого разрешения менее 10 мкм (до 4,5 мкм). Хотя аксиальное, тангенциальное и радиальное разрешение были определены количественно в идеальных условиях, они должны обеспечить хорошие оценки реальных характеристик датчика при визуализации тканей при наличии ультразвукового и оптического рассеяния и затухания.
Открыть в отдельном окне
(В цвете онлайн) Пространственное разрешение эндоскопического датчика PA.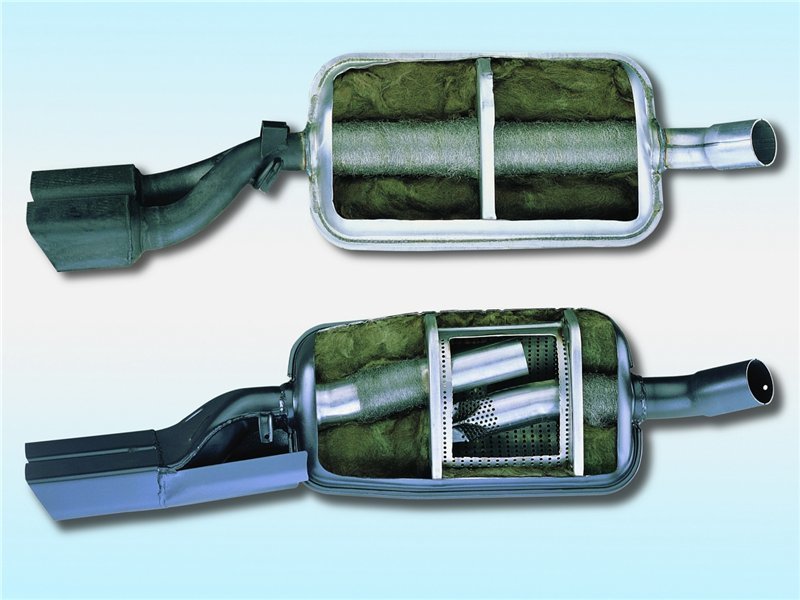 (а) Осевой ESF, измеренный путем линейного перемещения датчика на изображение края черной ленты. (b) Осевой LSF, рассчитанный по ESF, показанному на панели (а). (c) Тангенциальный ESF, измеренный путем кругового сканирования края черной ленты. (d) Тангенциальный LSF, рассчитанный по ESF, показанному на панели (c). (e) Импульсная характеристика PA с временным разрешением, измеренная ультразвуковым датчиком MRR. (f) Отношение контраста к шуму, рассчитанное методом сдвига и суммы. Радиальное разрешение оценивалось в 6 дБ (пунктирная линия).
(а) Осевой ESF, измеренный путем линейного перемещения датчика на изображение края черной ленты. (b) Осевой LSF, рассчитанный по ESF, показанному на панели (а). (c) Тангенциальный ESF, измеренный путем кругового сканирования края черной ленты. (d) Тангенциальный LSF, рассчитанный по ESF, показанному на панели (c). (e) Импульсная характеристика PA с временным разрешением, измеренная ультразвуковым датчиком MRR. (f) Отношение контраста к шуму, рассчитанное методом сдвига и суммы. Радиальное разрешение оценивалось в 6 дБ (пунктирная линия).
Производительность нашего эндоскопа PA также зависит от стабильности чувствительности обнаружения MRR во время сканирования. Круговое сканирование может возмущать входное PM-волокно, что может влиять на оптическую связь, изменяя интенсивность и поляризацию доставляющего лазера, вызывая сдвиг резонансной частоты MRR. Мы изучили влияние потенциального возмущения, выполнив круговое сканирование на 360 градусов и измерив спектры пропускания через каждые 10 градусов. показывает чувствительность обнаружения, полученную из спектров при фиксированной рабочей длине волны. Результат показывает хорошую согласованность чувствительности обнаружения в диапазоне сканирования 180 градусов; но чувствительность падает на целых 30%, когда угол превышает 180 градусов.
показывает чувствительность обнаружения, полученную из спектров при фиксированной рабочей длине волны. Результат показывает хорошую согласованность чувствительности обнаружения в диапазоне сканирования 180 градусов; но чувствительность падает на целых 30%, когда угол превышает 180 градусов.
Открыть в отдельном окне
(В цвете онлайн) (a) Изменение угловой чувствительности эндоскопического датчика PA на основе MRR. (b) Полный 360-градусный B-скан цилиндрической черной ленты.
Для проверки способности визуализации PA при полном 360-градусном сканировании был изготовлен фантомный образец путем сгибания полоски черной ленты для создания поглощающей поверхности с цилиндрическим контуром. показывает B-скан изображения фантомного образца в полярных координатах, и изменение интенсивности визуально не очевидно. Начальная и конечная позиции сканирования (отмеченные сплошной линией на ) очень хорошо перекрываются; однако их пиковые сигналы показывают разницу в интенсивности, которая согласуется с изменением угловой чувствительности, полученным в результате вышеупомянутого теста на чувствительность. Это говорит о том, что изображение от кругового сканирования необходимо компенсировать путем нормализации соответствующей угловой чувствительности.
Это говорит о том, что изображение от кругового сканирования необходимо компенсировать путем нормализации соответствующей угловой чувствительности.
Чтобы продемонстрировать возможности объемной визуализации эндоскопической системы PA, мы получили изображения двух фантомных образцов [], которые имитируют реальные анатомические особенности для эндоскопической визуализации. Первый фантом представлял собой полую черную пластиковую трубку, изготовленную с помощью 3D-печати, как показано на рис. Внутренняя поверхность трубки была специально спроектирована так, чтобы иметь неровный волнообразный рисунок. Кроме того, параллельные гребнеобразные элементы были вызваны процессом послойного экструзионного осаждения 3D-печати (Replicator 2, MakerBot) с интервалом примерно 150 мкм на слой. Цилиндрический 9Было выполнено 0-градусное сканирование внутри трубки, и реконструированный 3D-рендеринг четко разрешил морфологию ее внутренней поверхности []. показывает линию А из положения, выделенного в .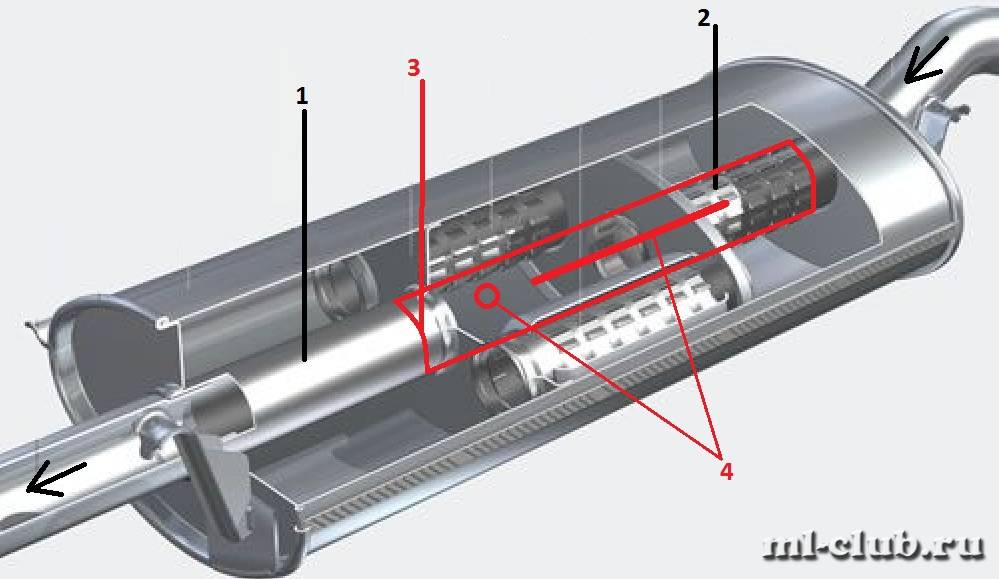 Ребристые элементы глубиной менее 100 мкм могут быть легко восстановлены в осевом поперечном сечении благодаря улучшенному пространственному разрешению. Как было замечено, мощность сигнала ФАР от впадин волнистой поверхности имеет тенденцию быть слабее, что вызвано высокой числовой апертурой линзы GRIN, ограничивающей глубину резкости.
Ребристые элементы глубиной менее 100 мкм могут быть легко восстановлены в осевом поперечном сечении благодаря улучшенному пространственному разрешению. Как было замечено, мощность сигнала ФАР от впадин волнистой поверхности имеет тенденцию быть слабее, что вызвано высокой числовой апертурой линзы GRIN, ограничивающей глубину резкости.
Открыть в отдельном окне
(В цвете онлайн) Результаты фантомной визуализации. (а) Фотография фантома из черной пластиковой трубки. (b) 3D объемная визуализация внутренней поверхности PA. Осевое сечение в области, отмеченной пунктирной рамкой, показано на правой панели. Пруток: 500 мкм. (c) Сигнал линии A из положения, отмеченного красной линией на правом рисунке на панели b. (d) Фотография фантома волос. (e) Объемная визуализация изображения образца волос PA. Сплющенный вид в поперечном сечении в пунктирной области показан на нижней панели. Пруток: 500 мкм. (f) Сигнал линии A из положения, отмеченного красной линией на нижнем рисунке на панели e.
Второй фантом, показанный на рисунке, использовался для проверки способности системы различать мелкие детали, такие как кровеносные сосуды в ткани. Пряди человеческих волос (диаметр: ~ 100 мкм) были случайным образом вставлены и зажаты между слоями полупрозрачной ленты, которые, в свою очередь, были свернуты в трубку. — соответствующее трехмерное PA-изображение, показывающее четкие границы между выделенными волосами и фоном. представляет собой линию А из положения, выделенного на , что указывает на хорошее отношение сигнал/шум. Чтобы дополнительно проиллюстрировать пространственную ориентацию каждого волоса, было взято поперечное сечение и сглажено, чтобы показать распределение волос по глубине. В результате высокого качества оптического фокуса и более высокого радиального разрешения, обеспечиваемого ультразвуковым датчиком MRR, волосы с соответствующим высоким коэффициентом поглощения обычно появляются только на их верхней поверхности, демонстрируя форму полумесяца в поперечном сечении.
Хотя эндоскопия PA предлагает визуализацию с оптическим поглощением с исключительным разрешением и улучшенной глубиной проникновения, только ограниченные ткани эндотелия обладают сильным контрастом по оптическому поглощению. В результате часто бывает трудно найти области интереса и обеспечить всестороннее анатомическое представление, что ограничивает практичность эндоскопии ПА. В последнее время все большее внимание уделяется интеграции эндоскопии PA с другими методами визуализации, такими как оптическая конфокальная микроскопия [22] и оптическая когерентная томография (ОКТ) [23,24]. Дополнительные контрасты могут служить направляющими для направления эндоскопической PAM к конкретной интересующей области. Поскольку в нашей конструкции использовался тонкий прозрачный ультразвуковой датчик MRR, мультимодальное включение может быть легко достигнуто путем вставки дополнительных оптических волокон для реализации ОКТ или конфокальной микроскопии без изменения оптической конструкции и компонентов ультразвукового датчика. Кроме того, ультразвуковой датчик MRR обеспечивает достаточно большую полосу обнаружения, что значительно улучшает радиальное разрешение эндоскопии PA. Следовательно, изометрические воксели в объемной визуализации впервые были реализованы в эндоскопии PA. Это значительно улучшает регистрацию пространственных изображений PA-изображения с другими модальностями оптического изображения.
Кроме того, ультразвуковой датчик MRR обеспечивает достаточно большую полосу обнаружения, что значительно улучшает радиальное разрешение эндоскопии PA. Следовательно, изометрические воксели в объемной визуализации впервые были реализованы в эндоскопии PA. Это значительно улучшает регистрацию пространственных изображений PA-изображения с другими модальностями оптического изображения.
Таким образом, мы разработали новый полностью оптический эндоскопический датчик PA и продемонстрировали возможность использования полимерного ультразвукового датчика MRR для трехмерной эндоскопической визуализации PA с оптическим разрешением. Полностью оптическая конструкция демонстрирует потенциальный способ реализации миниатюрного ФАР-зонда без ущерба для его акустической чувствительности. Добавление PAM в мультимодальные эндоскопы очень желательно в клинических применениях и научных исследованиях для обеспечения дополнительных анатомических и функциональных контрастов в различных диагностических возможностях (например, желудочно-кишечные патологии, рак предстательной железы и заболевание коронарной артерии). Наш дизайн предлагает потенциал для надежной мультимодальной платформы за счет сочетания эндоскопической ОКТ и других методов оптической визуализации.
Наш дизайн предлагает потенциал для надежной мультимодальной платформы за счет сочетания эндоскопической ОКТ и других методов оптической визуализации.
Мы искренне признательны за щедрую поддержку со стороны Национальных институтов здравоохранения в виде грантов 1R24EY022883 и 1R01EY019951 для HFZ, а также грантов Национального научного фонда CBET-1055379 и CBET-1066776 для HFZ и CMMI-0955195 и CMMI-0751621 для CS. .
1. Ван Л.В., Ху С. Фотоакустическая томография: визуализация in vivo от органелл к органам. Наука. 2012; 335:1458–1462. [Бесплатная статья PMC] [PubMed] [Google Scholar]
2. Yang J-M, Favazza C, Chen RM, Yao JJ, Cai X, Maslov K, Zhou Q, Shung KK, Wang LV. Синхронная функциональная фотоакустическая и ультразвуковая эндоскопия внутренних органов in vivo. Нац. Мед. 2012;18:1297–1302. [Бесплатная статья PMC] [PubMed] [Google Scholar]
3. Чжан Х.Ф., Маслов К., Стойка Г., Ван Л.В. Функциональная фотоакустическая микроскопия для неинвазивной визуализации in vivo с высоким разрешением. Нац. Биотехнолог. 2006; 24:848–851. [PubMed] [Google Scholar]
Нац. Биотехнолог. 2006; 24:848–851. [PubMed] [Google Scholar]
4. Liu T, Wei Q, Wang J, Jiao SL, Zhang HF. Комбинированная фотоакустическая микроскопия и оптическая когерентная томография могут измерять скорость метаболизма кислорода. Биомед. Опц. Выражать. 2011;2:1359–1365. [Бесплатная статья PMC] [PubMed] [Google Scholar]
5. Чатни М.Р., Ся Дж., Сон Р., Маслов К., Го З., Чжан И., Ван К., Ся И., Анастасио М., Арбайт Дж., Ван Л.В. Метаболизм глюкозы в опухоли, визуализированный in vivo у мелких животных с помощью фотоакустической компьютерной томографии всего тела. Дж. Биомед. Опц. 2012;17:076012. [Бесплатная статья PMC] [PubMed] [Google Scholar]
6. Yao J, Maslov KI, Wang LV. Фотоакустическая томография in vivo общего кровотока и потенциальная визуализация ракового ангиогенеза и гиперметаболизма. Лечение рака Technol Res. 2012; 11:301–307. [Бесплатная статья PMC] [PubMed] [Google Scholar]
7. Viator JA, Paltauf G, Jacques SL, Prahl SA. Разработка и испытания эндоскопического фотоакустического зонда для определения глубины воздействия после фотодинамической терапии.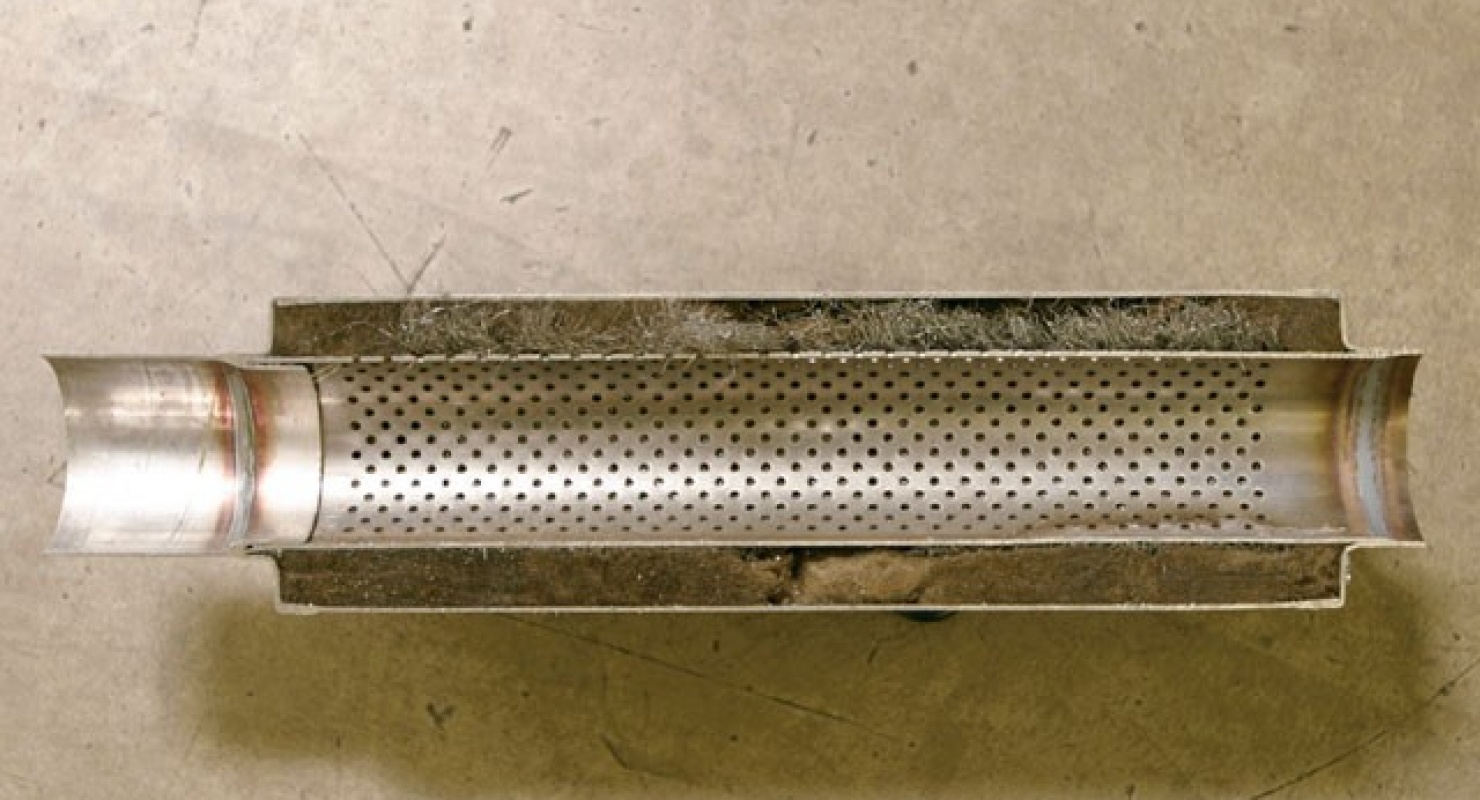 проц. ШПАЙ. 2001;4256:16. [Google Scholar]
проц. ШПАЙ. 2001;4256:16. [Google Scholar]
8. Сетураман С., Аглямов С.Р., Амириан Дж.Х., Смоллинг Р.В., Емельянов С.Ю. Внутрисосудистая фотоакустическая визуализация с использованием катетера для внутрисосудистого ультразвукового исследования. IEEE транс. Ультрасон. Ферроэлектр. Частота Контроль. 2007; 54:978. [PubMed] [Google Scholar]
9. Ян Дж. М., Маслов К., Ян Х. С., Чжоу К., Шунг К. К., Ван Л. В. Фотоакустическая эндоскопия. Опц. лат. 2009 г.;34:1591–1593. [Бесплатная статья PMC] [PubMed] [Google Scholar]
10. Yuan Y, Yang S, Xing D. Доклинический фотоакустический эндоскоп на основе акустооптической коаксиальной системы с использованием кольцевой матрицы преобразователей. Опц. лат. 2010;35:2266–2268. [PubMed] [Google Scholar]
11. Си Л., Дуань С., Се Х., Цзян Х. Миниатюрный зонд, сочетающий фотоакустическую микроскопию с оптическим разрешением и оптическую когерентную томографию для исследования микроциркуляции in vivo. заявл. Опц. 2013;52:1928. [PubMed] [Академия Google]
12. Yang Y, Li X, Wang TH, Kumavor PD, Aguirre A, Shung KK, Zhou QF, Sanders M, Brewer M, Zhu Q. Интегрированная оптическая когерентная томография, ультразвук и фотоакустическая визуализация для характеристики ткани яичников. Биомед. Опц. Выражать. 2011;2:2551–2561. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Yang Y, Li X, Wang TH, Kumavor PD, Aguirre A, Shung KK, Zhou QF, Sanders M, Brewer M, Zhu Q. Интегрированная оптическая когерентная томография, ультразвук и фотоакустическая визуализация для характеристики ткани яичников. Биомед. Опц. Выражать. 2011;2:2551–2561. [Бесплатная статья PMC] [PubMed] [Google Scholar]
13. Shung KK, Cannata JM, Zhou QF. Пьезоэлектрические материалы для высокочастотных медицинских изображений: обзор. Дж. Электрокерамика. 2007; 19: 141–147. [Google Scholar]
14. Niederhauser JJ, Jaeger M, Hejazi M, Keppner H, Frenz M. Преобразователь из ПВДФ с прозрачным покрытием ITO для оптоакустического профилирования глубины. Опц. Комм. 2005; 253:401–406. [Google Академия]
15. Brodie G, Qiu YQ, Cochran S, Spalding G, Macdonald M. Оптически прозрачный пьезоэлектрический преобразователь для ультразвуковых манипуляций с частицами. IEEE T Ультрасон. Фер. 2014; 61: 389–391. [PubMed] [Google Scholar]
16. Уайлд Г., Хинкли С. Акусто-ультразвуковые оптоволоконные датчики: обзор и современное состояние. IEEE Sens. J. 2008; 8: 1184–1193. [Google Scholar]
IEEE Sens. J. 2008; 8: 1184–1193. [Google Scholar]
17. Gallego D, Wang M, Hiltunen J, Myllyla R, Lamela H. Полимерный интерферометрический датчик с оптическим волноводом с перевернутым ребром для оптоакустической визуализации. проц. ШПАЙ. 2012;8223:822343. [Google Академия]
18. Чжан Э.З., Борода ПК. Миниатюрный полностью оптический зонд для фотоакустической визуализации. проц. ШПАЙ. 2011;7899:78991Ф. [Google Scholar]
19. Li H, Dong B, Zhang Z, Sun C, Zhang HF. Прозрачный широкополосный ультразвуковой детектор на основе микрокольцевого резонатора для функциональной фотоакустической визуализации. науч. Отчет 2014; 4:4496. [Бесплатная статья PMC] [PubMed] [Google Scholar]
20. Wang J, Liu T, Jiao S, Chen R, Zhou Q, Shung KK, Wang LV, Zhang HF. Эффект насыщения в функциональной фотоакустической визуализации. Дж. Биомед. Опц. 2010;15:5. [Бесплатная статья PMC] [PubMed] [Google Scholar]
21. Ку Г., Маслов К., Ли Л., Ван Л.В. Фотоакустическая микроскопия с поперечным разрешением 2 мкм.