Ошибка
- Автомобиль — модели, марки
- Устройство автомобиля
- Ремонт и обслуживание
- Тюнинг
- Аксессуары и оборудование
- Компоненты
- Безопасность
- Физика процесса
- Новичкам в помощь
- Приглашение
- Официоз (компании)
- Пригородные маршруты
- Персоны
- Наши люди
- ТЮВ
- Эмблемы
- А
- Б
- В
- Г
- Д
- Е
- Ё
- Ж
- З
- И
- Й
- К
- Л
- М
- Н
- О
- П
- Р
- С
- Т
- У
- Ф
- Х
- Ц
- Ч
- Ш
- Щ
- Ъ
- Ы
- Ь
- Э
- Ю
- Я
Навигация
- Заглавная страница
- Сообщество
- Текущие события
- Свежие правки
- Случайная статья
- Справка
Личные инструменты
- Представиться системе
Инструменты
- Спецстраницы
Пространства имён
- Служебная страница
Просмотры
Перейти к: навигация, поиск
Запрашиваемое название страницы неправильно, пусто, либо неправильно указано межъязыковое или интервики название. Возможно, в названии используются недопустимые символы.
Возможно, в названии используются недопустимые символы.
Возврат к странице Заглавная страница.
Если Вы обнаружили ошибку или хотите дополнить статью, выделите ту часть текста статьи, которая нуждается в редакции, и нажмите Ctrl+Enter. Далее следуйте простой инструкции.
Почему стучит рулевая рейка — стук в рулевой рейке
Реечный рулевой механизм — самая популярная система для управления движением автомобиля. Данная система имеет ряд достоинств, которые выделяют ее среди остальных систем. К ним относятся:
- очень высокий уровень точности управления,
- наличие минимального количества деталей, которые могут изнашиваться, вследствие чего и приходить в негодность.

В большинстве случаев специальный реечный механизм практически всех транспортных средств основан на работе всего лишь двух составных частей — шестерни и стойки. Именно это обеспечивает долгий срок службы механизма. В случае правильного монтажа механизма, он сможет работать без перебоев больше 100 тыс. км. Но, все же, рано или поздно потребуется и его ремонт. Ряд проблем, возникающих с механизмом рулевой рейки можно решить самостоятельно. И одна из этих проблем — стук в рулевой рейке. Посмотрим, как работает этот нехитрый механизм.
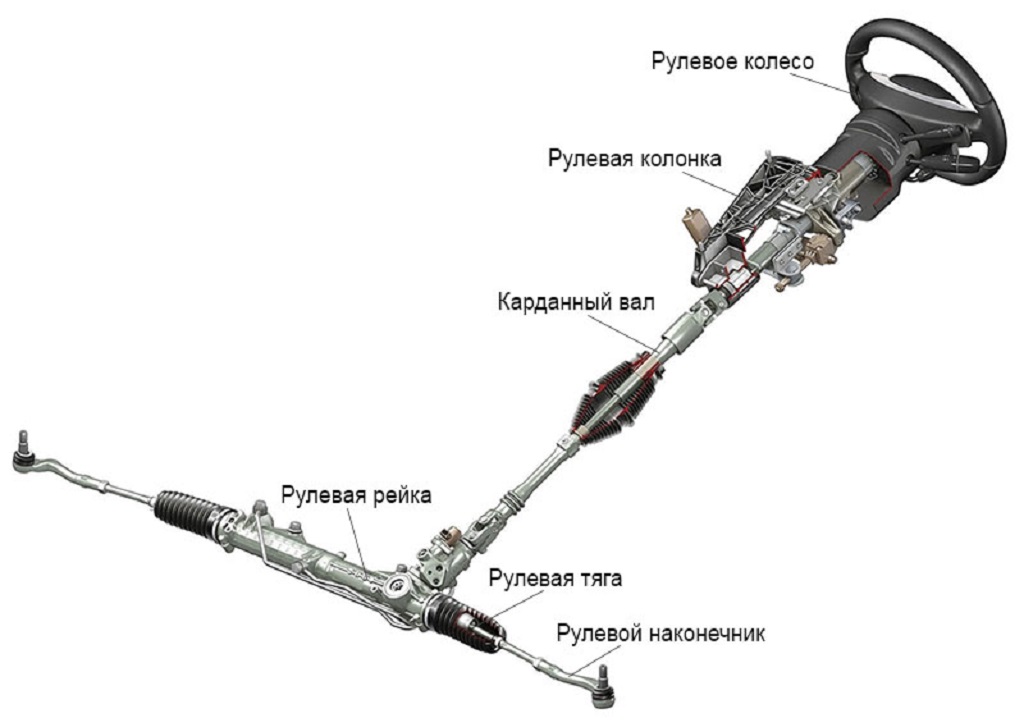
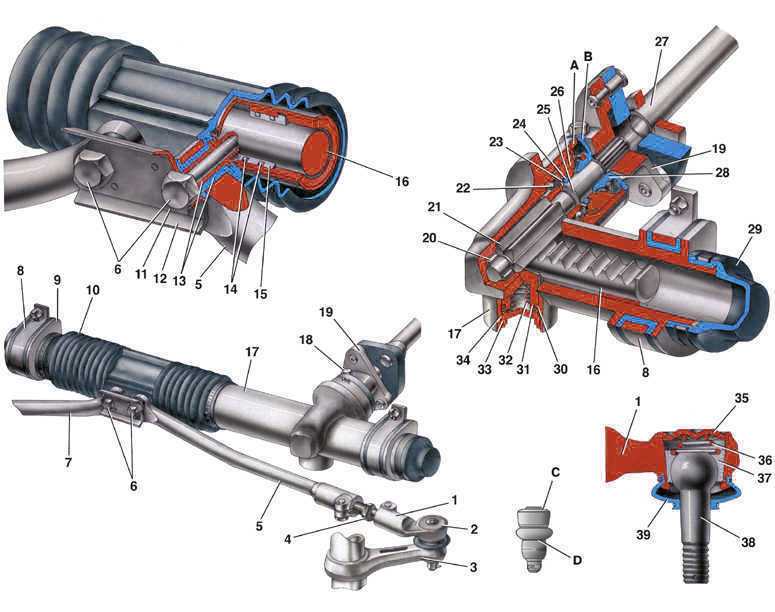
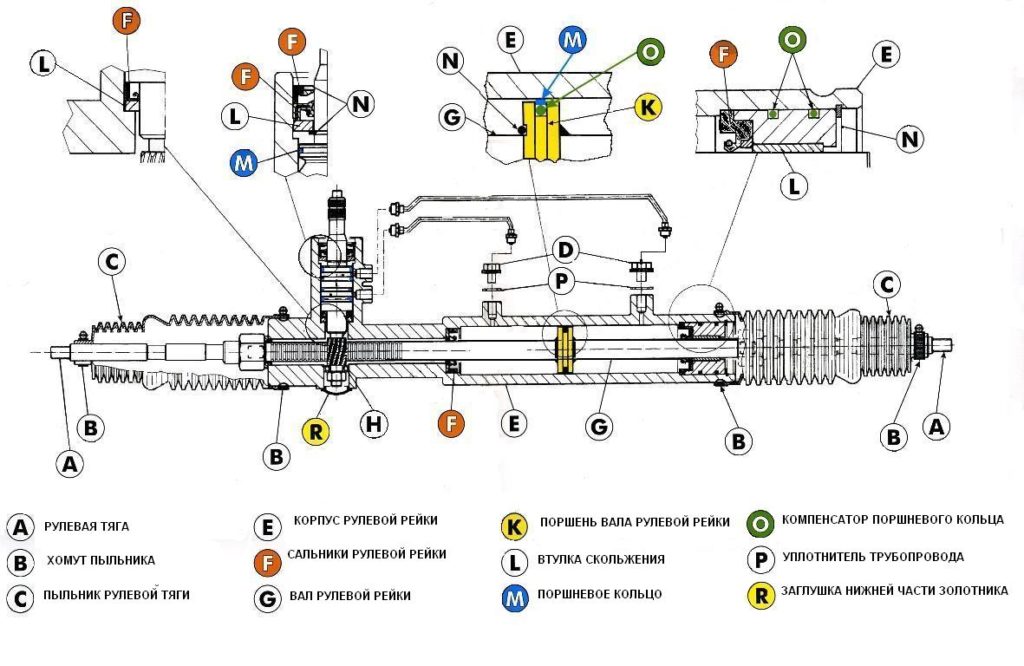
Конструкция
Схема устройства
Конструкция этого механизма проста. Рулевая рейка — это часть специальной системы автомобиля, которая предназначена для осуществления контроля за движением колес. При помощи этой системы осуществляется движение транспортного средства по заданной траектории. Работа рулевой рейки заключается в том, чтобы осуществить перемещение ведущей шестерни, которая связана с колесами.
Принцип действия поворотного механизма несложно объяснить: при произведении вращения рулевого колеса, рулевая рейка осуществляет перемещение в необходимом направлении, что в свою очередь приводит в движение специальные тяги рулевого привода. В результате таких манипуляций колеса и поворачиваются.
В результате таких манипуляций колеса и поворачиваются.
Недостатки реечного управления
Несмотря на уровень надежности реечного управления, оно обладает рядом недостатков:
- Повышенная чувствительность к различным ударным нагрузкам, которые появляются вследствие движения по дорогам с покрытием очень низкого качества.
- Механизм склонен к небольшой виброактивности.
- Довольно высокая нагрузка на работающие детали.
- Процесс монтажа намного сложнее, чем сама конструкция.
Определение технического состояния
Оцените состояние
Если в рулевой рейке появился стук для начала необходимо провести полную проверку механизма. Определение технического состояния рулевой рейки осуществляется при неработающем двигателе на смотровой яме. Благодаря такой диагностике можно окончательно установить сложность требующегося ремонта и решить осуществлять ли его самому или обратиться в автосервис для полной замены узла.
Попеременное поворачивание рулевого колеса до упора в одну и другую сторону поможет сделать ряд выводов:
- визуально, а также на слух произвести оценку положения всех креплений данного механизма;
- осуществить проверку шарниров рулевых тяг на наличие в них различных зазоров;
- выявить наличие стука, а также заедания рейки. В случае, если стук остается после того, как было произведено откручивание поворотных рычагов и поперечных тяг, необходимо осуществить ремонт рулевой рейки или же ее замену.
Узнав причину, можно попробовать самостоятельно сделать ремонт данного узла или обратиться за помощью к специалисту. В любом случае потребуется либо замена отдельной детали, либо всего механизма. Что дальше делать с узлом, который был сломан, решать только водителю. Повод для раздумий в том, что проведение полной замены рулевой рейки процедура не из дешевых. Новый механизм прослужит намного дольше, чем тот, который был отремонтирован.
Были замечены случаи появления стука даже в новых автомобилях.
При этом независимо, в какой стране был произведен автомобиль.
Причины появления стука
Плохо затянуты крепежные соединения
Причины стука могут быть самыми разными. Самые распространенные из них:
- Были плохо затянуты все крепежные соединения механизма. Для устранения такого стука, нужно всего лишь подтянуть сильнее все гайки и болты данного соединения.
- Возможный износ опорной втулки, с какой либо стороны. При движении автомобиля, особенно по дороге с неровным покрытием, может образоваться люфт. Именно из-за этого и возможно появление в рулевой колонке различных шумов.
- Появившаяся на втулке коррозия также может привести к появлению люфта. В этом случае решение только одно — замена рейки рулевого механизма.
- Возможное повреждение или же истирание различных защитных резиновых чехлов. Данное повреждение приводит к тому, что в середину механизма может попадать различная грязь, которая в свою очередь способна привести к критическому износу рейки, а также опор скольжения.

Причиной, которая привела к износу втулки, может быть очень мягкий материал, который использован при производстве. В этом случае происходит сминание втулки при езде по дорогам низкого качества. Для решения этой проблемы можно самому выточить новую втулку из более прочного материала, например из капролона. В этом случае нет необходимости покупать новую и оригинальную деталь, это позволит существенно сэкономить на ремонте.
Осуществление ремонта
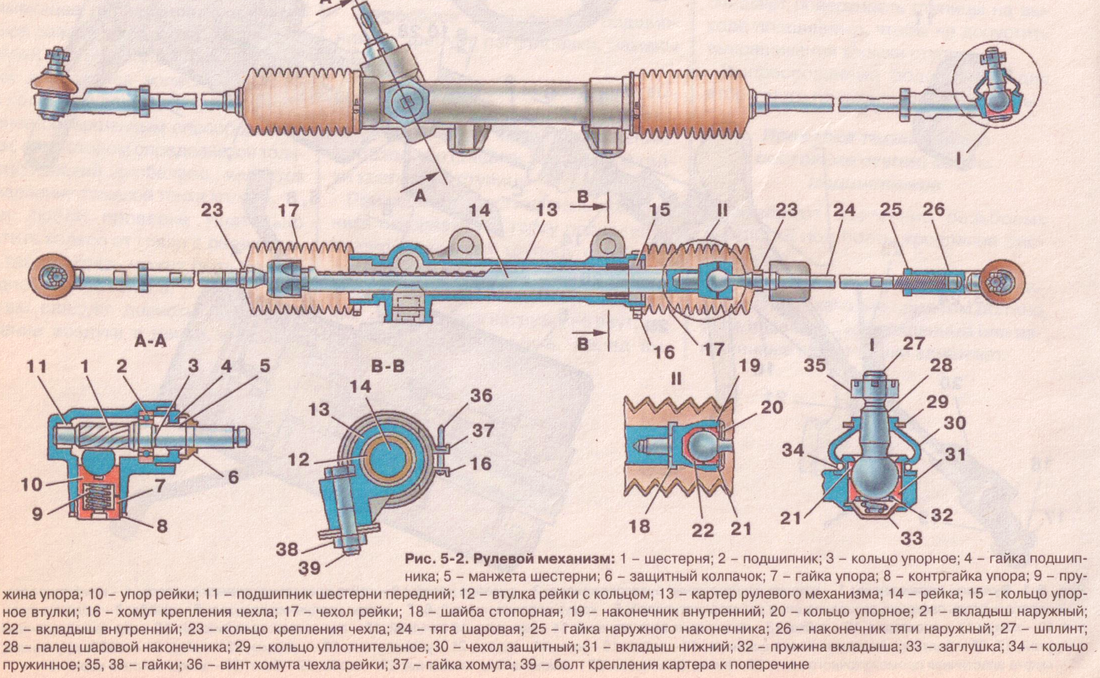
Ремкомплект
Перед началом ремонта нужно купить ремонтный комплект. Данный комплект включает в себя новые детали зубчатой рулевой рейки, а также сальники, втулки и различные уплотнители и тюбик смазки Литол. Для проведения ремонта вам потребуется ключ-восьмигранник на 17, съемник для работы с подшипником и щипцы для монтажа стопорного кольца, ну и набор гаечных ключей.
Ремонт производится в несколько этапов:
- Сначала необходимо снять гайки с рулевых пальцев и произвести выпрессовку пальцев из отверстий поворотных рычагов стоек подвески.

Снятие рулевой рейки
- Затем обратите внимание на стопорный болт на шлицевом соединении. Он находится у педального узла, его необходимо выкрутить.
- Теперь возьмите головку на 13 и открутите гайки, которые фиксируют рулевой механизм. Удалите скобы крепления механизма.
Извлечение
- Потом разъедините рулевой вал и приводную шестерню. На этом этапе надо поддомкратить машину с правой стороны.
- С помощью молотка и зубила отогните кроя стопорной пластины. Возьмите головку на 22 и выверните болты на рулевых тягах.
- Теперь можно снять соединительную и стопорную пластины и отсоединить рулевые тяги.
- Снимите резиновую опору и защитный чехол.
- Демонтируйте рейку.
Откручиваем упорную гайку
- Потом промойте картер и установите новый подшипник.
- Остается только смазать шестеренки Литолом и собрать узел. Сборка осуществляется в обратной последовательности.
Ослабляем гайку на валу привода шестерни
После завершения процедуры сборки необходимо отрегулировать зазор между гайкой и упором до 0,12 мм.
Процесс осуществления замены рулевой рейки на всех автомобилях практически одинаков. Перед началом работы стоит узнать тип рулевого механизма, и была ли произведена установка различного типа усилителей.
Видео
Подробный обзор по конструкции рулевой рейки смотрите ниже:
ackermann_steering_controller — ROS Wiki
Показать дистрибутивы EOL:
Статус документации
ros_controllers : ackermann_steering_controller | diff_drive_controller | усилия_контроллеры | force_torque_sensor_controller | forward_command_controller | Gripper_action_controller | imu_sensor_controller | Joint_state_controller | Joint_trajectory_controller | позиционные_контроллеры | rqt_joint_trajectory_controller | скорость_контроллеры
Выпущено
Документировано
Контроллер для мобильной базы с управляемым приводом.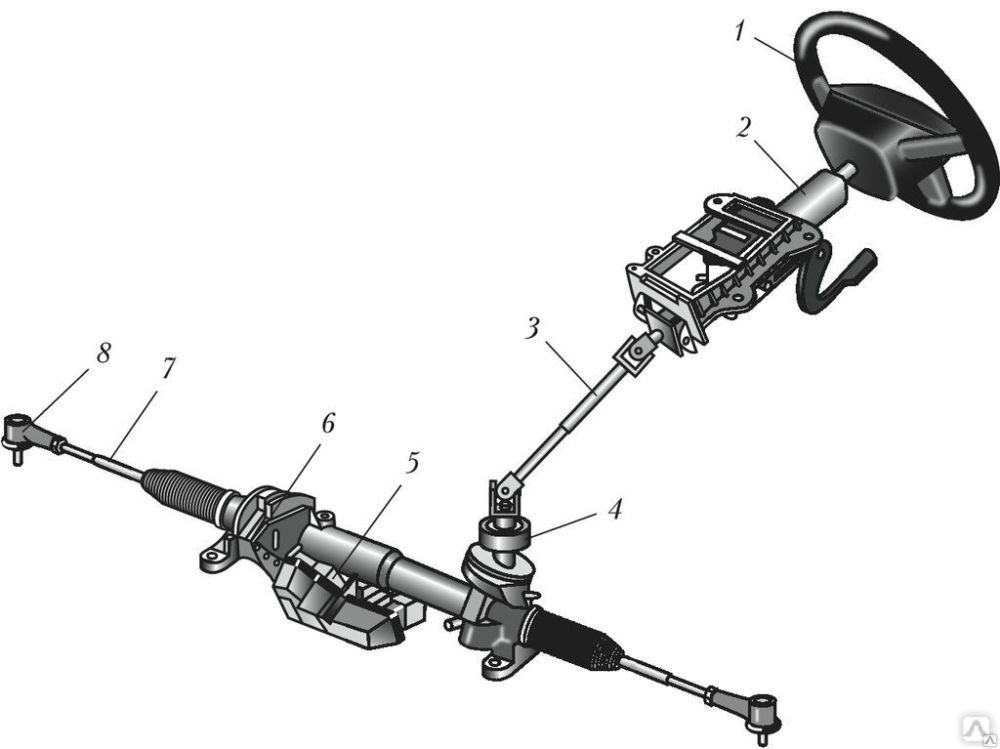
- Статус мейнтейнера: поддерживается
- Мейнтейнер: Масару Морита
- Автор: Масару Морита
- Лицензия: https Bug
- 2 ://github.com/ros-controls/ros_controllers/issues
- Источник: git https://github.com/ros-controls/ros_controllers.git (ветвь: kinetic-devel)
ros_controllers : ackermann_steering_controller | diff_drive_controller | усилия_контроллеры | force_torque_sensor_controller | forward_command_controller | Gripper_action_controller | imu_sensor_controller | Joint_state_controller | Joint_trajectory_controller | позиционные_контроллеры | rqt_joint_trajectory_controller | speed_controllers
Выпущено
Документировано
Контроллер для мобильной базы с управляемым приводом.
- Статус сопровождающего: поддерживается
- Сопровождающий: Масару Морита
 kyutech DOT jp>
kyutech DOT jp> - Автор: Масару Морита
- Лицензия: BSD
- Отслеживание ошибок/функций: https: https /github.com/ros-controls/ros_controllers/issues
- Источник: git https://github.com/ros-controls/ros_controllers.git (ветвь: kinetic-devel)
ros_controllers : ackermann_steering_controller | diff_drive_controller | усилия_контроллеры | force_torque_sensor_controller | forward_command_controller | Gripper_action_controller | imu_sensor_controller | Joint_state_controller | Joint_trajectory_controller | позиционные_контроллеры | скорость_контроллеры
Выпущено
Документировано
Контроллер для мобильной базы с управляемым приводом.
- Статус сопровождающего: поддерживается
- Сопровождающий: Масару Морита
, Бенс Мадьяр - Автор: Масару Морита
- Лицензия: BSD
- Отслеживание ошибок/функций: https://github.
 com/ros-controls/ros_controllers/issues
com/ros-controls/ros_controllers/issues - Источник: git https://github.com/ros-controls/ros_controllers.git (ветвь : мелодичное развитие)
ros_controllers : ackermann_steering_controller | diff_drive_controller | усилия_контроллеры | force_torque_sensor_controller | forward_command_controller | Gripper_action_controller | imu_sensor_controller | Joint_state_controller | Joint_trajectory_controller | позиционные_контроллеры | speed_controllers
Выпущено
Документировано
Контроллер для мобильной базы с управляемым приводом.
- Статус специалиста по обслуживанию: поддерживается
- Сопровождающий: Масару Морита
, Бенс Мадьяр - Автор: Масару Морита
- Лицензия: BSD 9002
- Отслеживание ошибок/функций: https://github.com/ros-controls/ros_controllers/issues
- Источник: git https://github.
 com/ros-controls/ros_controllers.git (ветвь: noetic-devel)
com/ros-controls/ros_controllers.git (ветвь: noetic-devel)
Содержимое
- Обзор
- Команды скорости
- Тип аппаратного интерфейса
- Преобразование интерфейсов контроллера в реальные интерфейсы контроллера
- Другие характеристики
- Роботы
- API РОС
- Описание
- Темы с подпиской
- Опубликованные темы
- Параметры соединения
- Параметры покрытия
- Параметры, связанные со временем
- Параметры, связанные с TF
- Параметры множителя
- Параметры лимитера
- Параметры калибровки
- Другие параметры
- Примеры конфигурации контроллера
- Минимальное описание
- Полное описание
- РоботHW
- RobotHWSim для GAZEBO
- Recovery Behavior
- Описание
Пример использования пакетов можно увидеть в Robots/CIR-KIT-Unit03.
Обзор
Контроллер для колесных систем с рулевым механизмом Аккермана. Управление осуществляется в форме команды скорости, которая разделяется, а затем передается на одно заднее колесо и одно переднее рулевое управление базы ведущего колеса с рулевым управлением Аккермана. Одометрия рассчитывается на основе обратной связи с оборудованием и публикуется.
Управление осуществляется в форме команды скорости, которая разделяется, а затем передается на одно заднее колесо и одно переднее рулевое управление базы ведущего колеса с рулевым управлением Аккермана. Одометрия рассчитывается на основе обратной связи с оборудованием и публикуется.
Команды скорости
Контроллер работает с поворотом скорости, из которого он извлекает компонент x линейной скорости и компонент z угловой скорости. Скорости других компонентов игнорируются.
Тип аппаратного интерфейса
Контроллер наследует multi_interface_controller для работы с колесными шарнирами через интерфейс скорости для линейного колеса и интерфейс положения для переднего рулевого колеса, что является самой базовой конфигурацией для Ackermann. рулевой приводной механизм.
Преобразование интерфейсов контроллера в фактические интерфейсы контроллера
Если вы хотите, чтобы rviz показывал состояния tf реальных совместных интерфейсов робота через Joint_state_controller и robot_state_publisher, вам необходимо преобразовать два интерфейса ackermann_steering_controller в конкретные интерфейсы вашего робота через RobotHW или RobotHWSim (обычно используется для беседки). Это связано с тем, что контроллер обновляет только базовые интерфейсы, упомянутые в предыдущем разделе.
Это связано с тем, что контроллер обновляет только базовые интерфейсы, упомянутые в предыдущем разделе.
Прочие характеристики
Роботы
CIR-KIT-Unit03 |
ROS API
Описание
Основным входом контроллера является тема Geometry_msgs::Twist в пространстве имен контроллера.
Темы с подпиской
cmd_vel(geometry_msgs/Twist)
- Команда скорости.
Опубликованные темы
odom(nav_msgs/Одометрия)
- Одометрия, рассчитанная на основе обратной связи с оборудованием.
(tf/tfMessage)
- Transform from odom to base_footprint
Joint Parameters
rear_wheel (string)
- Rear wheel joint name
(
string)
- Front steer имя соединения
Параметры покрытия
pose_covariance_diagonal (double[6])
- Диагональ ковариационной матрицы для публикации позы одометра
(
double[6])
- Диагональ ковариационной матрицы для публикации одометрии с поворотом
publish_rate (double, по умолчанию: 50,0)
- Частота (в Гц), с которой публикуется одометрия.
 Используется как для tf, так и для odom
Используется как для tf, так и для odom
(
double, по умолчанию: 0.5)
- Допустимый период (в с) между двумя последовательными командами скорости. После этой задержки на колеса будет отправлена команда нулевой скорости.
base_frame_id (строка, по умолчанию: base_link)
- Базовый frame_id, который используется для заполнения child_frame_id сообщений одометрии и TF.
(
String, по умолчанию: ODOM)
- Одометрия Frame_ID
(
BOOL, DEFALT: TRUE)
- PUBLISH TO TF TF TF TF TF TO TF OR DEFAL
- .MALIER 9002.MELIER 111111111.101111111.101111111111111191111. , по умолчанию: 1.0)
- Множитель, применяемый к параметру разноса колес.
 Это используется для учета различий между моделью робота и реальным роботом (например, настройка одометрии).
Это используется для учета различий между моделью робота и реальным роботом (например, настройка одометрии).
(
double, по умолчанию: 1.0)
- Множитель, применяемый к параметру радиуса колеса. Это используется для учета различий между моделью робота и реальным роботом (например, настройка одометрии).
(
двойной, по умолчанию: 1.0)
- Множители угла поворота рулевого колеса для точной настройки.
Параметры ограничителя
linear/x/has_velocity_limits (bool, по умолчанию: false)
- Должен ли контроллер ограничивать линейную скорость или нет.
(
double)
- Максимальная линейная скорость (в м/с)
(
double)
- Множитель, применяемый к параметру разноса колес.
- 0
- 0
- 0
- 0 .
 Установка этого параметра на 0.0 отключит движение назад. Если не указано, используется -max_velocity. 93).
Установка этого параметра на 0.0 отключит движение назад. Если не указано, используется -max_velocity. 93).
(
bool, по умолчанию: false)
- Должен ли контроллер ограничивать угловую скорость или нет.
(
double)
- Максимальная угловая скорость (в рад/с)
(
double)/с Минимальная угловая скорость (в рад/с)
Параметры калибровки
wheel_separation_h (двойной)
- Расстояние между задним и передним колесами. Ackermann_steering_controller попытается прочитать значение из URDF, если этот параметр не указан.
(
двойной)
- Радиус колес. Ожидается, что все они имеют одинаковый размер. Ackermann_steering_controller попытается прочитать значение из URDF, если этот параметр не указан.
Прочие параметры
Velocity_rolling_window_size (целое число, по умолчанию: 10)
- Количество выборок скорости, которые необходимо усреднить вместе для вычисления одометрических скоростей Twist.linear.x и Twist.angular.z
Примеры конфигурации контроллера
00 Минимальное описаниеmobile_base_controller: тип: "ackermann_steering_controller/AckermannSteeringController" заднее_колесо: 'заднее_колесо_шарнир' front_steer: 'front_steer_joint' pose_covariance_diagonal: [0,001, 0,001, 1000000,0, 1000000,0, 1000000,0, 1000,0] twist_covariance_diagonal: [0,001, 0,001, 1000000,0, 1000000,0, 1000000,0, 1000,0]
Полное описание
mobile_base_controller: тип: "ackermann_steering_controller/AckermannSteeringController" заднее_колесо: 'заднее_колесо_шарнир' front_steer: 'front_steer_joint' publish_rate: 50.0 # по умолчанию: 50 pose_covariance_diagonal : [0,001, 0,001, 1000000,0, 1000000,0, 1000000,0, 1000,0] twist_covariance_diagonal: [0,001, 0,001, 1000000,0, 1000000,0, 1000000,0, 1000,0] # Расстояние между задними и передними колесами и диаметр задних колес. # Оба они необязательны. # ackermann_steering_controller попытается прочитать один или оба из # URDF, если он не указан в качестве параметра. колесо_сепарация_ч : 1.0 колесо_радиус: 0,3 # Множители расстояния между колесами и радиуса для калибровки одометра. wheel_separation_h_multiplier: 1.0 # по умолчанию: 1.0 wheel_radius_multiplier: 1.0 # по умолчанию: 1.0 # Множители угла поворота руля для точной настройки. steer_pos_multiplier : 1.0 # Время ожидания команд скорости [с], по умолчанию 0.5 cmd_vel_timeout: 0,25 # Базовый фрейм_id base_frame_id: base_footprint # по умолчанию: base_link # Одом frame_id odom_frame_id: одом # Ограничения скорости и ускорения # Всякий раз, когда min_* не указан, по умолчанию -max_* линейный: Икс: has_velocity_limits: правда max_velocity : 1.
3
RobotHW
Пример использования ackermann_steering_controller с RobotHW можно взять из Robots/CIR-KIT-Unit03.
RobotHWSim для GAZEBO
Мы разработали общий плагин RobotHWSim для использования GAZEBO. Вы можете получить плагин от steer_bot_hardware_gazebo, а также посмотреть пример приложения на Robots/CIR-KIT-Unit03.
Поведение при восстановлении
Мы также предоставляем подключаемый модуль поведения при восстановлении для move_base, специально разработанный для базовых роботов с рулевым механизмом Аккермана в stepback_and_steerturn_recovery. См. Robots/CIR-KIT-Unit03, чтобы узнать, как его использовать.
Интернет-магазин Elstock
Перейти к поиску модели
Стартеры
Генераторы
Компрессоры кондиционера
Тормозные суппорты
Клапаны системы рециркуляции отработавших газов
Насосы рулевого управления
Рулевые рейки
Турбокомпрессоры
Наши услуги
Помощь
Мы здесь, чтобы помочь.