Что такое ГЛОНАСС сегодня знают многие. Но как именно работает эта система, для чего она предназначена и что необходимо для ее эффективного использования, часто остается «за скобками».
Расценивать систему ГЛОНАСС просто как систему спутниковой навигации — значит, предельно упрощать ее функционал. Сегодня она может использоваться не только военными (как это было изначально задумано), но и владельцами коммерческих предприятий, а также рядовыми автолюбителями.
Что такое ГЛОНАСС и как работает система?
ГЛОНАСС – это российская разработка, которая обеспечивает точное позиционирование объекта в пространстве с минимальной погрешностью. Для определения координат используется специальное оборудование, которое при поддержке наземной инфраструктуры связывается с сетью спутников, выведенных на околоземную орбиту.
Принцип работы системы:
- Для позиционирования терминал подает запрос на спутники. Чем больше спутников ответят на запрос (в идеале – не менее 4), тем точнее будут определены координаты.
- Ответный сигнал поступает в терминал, программный комплекс которого анализирует время задержки для разных спутников. На основе анализа ответной информации определяются координаты объекта, на котором установлено приемное оборудование.
При постоянной работе терминала (т.е. регулярной отправке запросов и анализе ответов) система ГЛОНАСС может определять не только положение, но и скорость движения объекта. При движении точность позиционирования снижается, но все равно остается достаточной для того, чтобы навигационное оборудования могло выполнить привязку координат объекта к электронной карте местности и построить маршрут.
Сравнение с основным аналогом — системой GPS
Дать полный ответ на вопрос «Что такое ГЛОНАСС?» невозможно без сравнения его с «ближайшим конкурентом» — системой глобального позиционирования GPS. Работы над обеими системами начались в СССР и США примерно в одно время – в начале 80х годов прошлого века. После того как спутниковая навигация вышла из-под полного контроля военных и стала применяться в коммерческих целях, ГЛОНАСС и GPS развивались по достаточно схожим сценариям.
Обе системы работают на базе группировок из 24 спутников на геостационарных орбитах. Но есть у них и отличия:
- Российские спутники двигаются в 3 плоскостях (соответственно, 8 аппаратов на одну орбиту).
- У спутников GPS выделено 4 орбиты по 6 аппаратов в каждой.
- Погрешность позиционирования у GPS несколько ниже, но обе системы достаточно точно определяют координаты.
- Основное преимущество GPS — практически 100% покрытие территории земного шара. ГЛОНАСС полностью покрывает территорию РФ, но за пределами Российской Федерации есть участки, в которых сигнал от спутников очень слабый или полностью отсутствует.
- Также есть нюансы технического характера: сервис из США использует кодировку CDMA, российский — более сложную и потому более энергоемкую кодировку FDMA. Из-за этого срок эксплуатации спутников ГЛОНАСС сокращается, так что возникает потребность в более частом выводе техники на орбиту.
| Параметры | ГЛОНАСС | GPS |
| Количество спутников | 24 | 24 |
| Кол-во спутников в плоскости | 8 | 6 |
| Кол-во орбит у спутников | 3 | 4 |
| Погрешность, м | 2…6 | 2…4 |
| Размер покрытия | Вся Россия и 2/3 территории мира | Около к 100% территории мира |
Сложно говорить об однозначном преимуществе одной из двух описанных навигационных систем. Тем более что чаще всего оборудование для удаленного позиционирования делают комбинированным: оно может работать как со спутниками GPS, так и с аппаратурой ГЛОНАСС.
Сфера применения
Аппаратура и программное обеспечение, которое дает возможность определять местонахождение объекта с помощью спутниковой сети, может решать несколько задач.
Основная функция, которую выполняют бытовые терминалы ГЛОНАСС — глобальная навигация для транспорта. Такое оборудование представляет собой усовершенствованную карту: координаты, определённые терминалом, накладываются на план местности и показывают оптимальное направление движения к заданному пункту.
Кроме этого оборудование может использоваться:
- В системах мониторинга транспорта. Предприятия, вынужденные отслеживать движение множества транспортных средств (автобусы для перевозки пассажиров, грузовики) по регулярным или нерегулярным маршрутам, получает возможность в любом момент увидеть, где находится та или иная машина. Для этого автомобили оснащаются ГЛОНАСС-терминалами, которые подключаются к программному обеспечению.
Кроме непосредственного отслеживания перемещения техники диспетчер получает возможность контролировать соблюдение скоростного режима, режима труда/отдыха шофера, сохранности груза в холодильных отсеках рефрижераторов, уровня горючего в баках/цистернах. Для решения этих задач может устанавливаться дополнительное оборудование, которое подключается к разъемам терминала.
- В беспилотных автомобилях. Для беспилотников спутниковая система навигации наряду с сенсорами, которые считывают параметры окружения – основные управляющие элементы. Такое оборудование уже производится и проходит испытания — в том числе на трассах РФ. Эксперты прогнозируют рост доли беспилотной техники на дорогах уже в ближайшем будущем.
- В противоугонных системах. ГЛОНАСС-трекер, скрытно установленный в машине, может подать сигнал тревоги, если координаты автомобиля изменяться без ведома хозяина. Кроме того, оборудование может периодически посылать сообщения с указанием местонахождения авто – это облегчит владельцу или представителям правоохранительных органов поиск украденной машины.
ГЛОНАСС для контроля транспорта
Если в сегменте систем навигации для водителей GPS традиционно остается более популярным, то ГЛОНАСС занимает более выгодную нишу в коммерческом сегменте. Связано это с активным развитием систем удаленного мониторинга транспорта.
Такие системы традиционно включают сеть ГЛОНАСС-терминалов, установленных на технике, и диспетчерское программное обеспечение. Внедрение мониторинга предусматривает его интеграцией с логистической схемой предприятия.
Основная задача – координация работы транспортного департамента и отслеживание движения автомобилей, перевозящих пассажиров или грузы, в режиме реального времени. Координаты каждой машины определяются по спутнику с установленным интервалом и накладываются на карту, потому диспетчер или руководитель департамента получает максимально объективную и оперативную информацию.
Кроме этого, мониторинг транспорта может использоваться для:
- Повышения уровня дисциплины. Навигационный терминал отслеживает движение машины по маршруту, исключая нецелевое использование техники и простои. Любая незапланированная остановка или отклонение от маршрута должны быть мотивированы водителем, причем связаться с ним диспетчер может сразу при обнаружении нарушения.
- Повышения безопасности движения и снижения аварийности. Система ГЛОНАСС дает возможность контролировать скорость движения, сигнализируя диспетчеру о превышении скорости. Кроме того, мониторинг позволяет отслеживать переработку для соблюдения режима труда и отдыха. Это не только снижает риск аварий из-за переутомления, но и гарантирует отсутствие штрафов при проверке показаний тахографа.
- Контроль уровня горючего. Установка датчиков уровня топлива с подключением их к терминалу практически полностью исключает возможность хищения ГСМ.
Что такое ЭРА ГЛОНАСС?
Система определения координат с помощь спутников ГЛОНАСС может решать и еще одну задачу – экстренное оповещение об аварии. Для этого в машину устанавливается терминал ЭРА-ГЛОНАСС (УВЭОС) с SIM-картой для работы в мобильной сети, и «тревожная кнопка» для вызова диспетчера.
Если машина оборудуется ЭРА-ГЛОНАСС при производстве или поставке в РФ, то кроме терминала с кнопкой вызова в нее устанавливаются также датчики, реагирующие на повреждения и автоматически подающие сигнал тревоги при ударе или перевороте.
Основная задача системы — оповестить экстренные службы (ДПС ГИБДД, МЧС, Скорую Помощь) о ДТП, передав им координаты места аварии и базовые сведения о машине и пассажирах. При этом сигнал о произошедшем принимает диспетчер колл-центра, он же передает полученные сведения спасательным службам.
Особенности работы экстренного информирования
Работает ЭРА-ГЛОНАСС по простому принципу:
- Сигнал тревоги может быть активирован автоматически (сработал датчик удара/переворота) или в ручном режиме (водитель либо кто-то из пассажиров нажал кнопку).
- После того как сигнал поступит в колл-центр, диспетчер связывается с машиной в голосовом режиме (конструкция терминала включает динамик и микрофон). Это необходимо для исключения ложных вызовов или случайных срабатываний кнопки «SOS».
- Если ответ не был получен, или водитель подтвердил факт ДТП, информация передается спасательным службам.
Автоматическая работа системы минимизирует время между аварией и прибытием помощи на место происшествия. Это значительно снижает смертность на дорогах, потому что у Скорой Помощи и спасателей появляется больше времени на оказание квалифицированной помощи.
Надежность системы очень высока: терминалы снабжаются автономными источниками питания, и даже при обесточивании бортовой сети во время аварии они сохраняют работоспособность в течение минимум нескольких часов. Этого вполне хватает для определения координат, а также для связи с колл-центром.
SIM-карта, установленная в терминале, обеспечивает устойчивую связь с диспетчером везде, где есть покрытие мобильной сети. Для обеспечения надежной связи приборы комплектуются эффективными антеннами для сотовой связи и спутников ГЛОНАСС. Обычно при хорошем качестве сигнала данные передаются по GPRS (используется 3G модем), при проблемах со связью терминала может отправлять служебные SMS с основной информацией для экстренных служб.
И сам сеанс связи с диспетчером, и вызов помощи путем активации экстренного информирования спасательных служб полностью бесплатны.
Какие данные собирает ?
УВЭОС обязательны к установке для всех автомобилей, которые выпускаются в обращение на территорию РФ. Но если новые машины оснащаются терминалами, тревожными кнопками и датчиками на производстве, то при импорте техники владелец обязан за свой счет установить ЭРА-ГЛОНАСС, иначе эксплуатировать машину в РФ будет невозможно.
Один из аргументов против оборудования автомобиля ЭРА-ГЛОНАСС – возможное отслеживание перемещения техники по спутниковой сети (т.е. незаконная передача личных данных спецслужбам) или прослушка салона. На практике же в терминалах не реализована функция трекинга, потому без ведома владельца отследить движение машины нельзя.
По информации производителей, терминал собирает и передает только такие данные:
- Координаты места аварии.
- Скорость на момент аварии.
- Тип срабатывания сигнала тревоги (датчик удара/переворота, принудительный вызов).
- Данные о машине: номер, марку, тип двигателя (бензин/дизель).
- Количество пристегнутых ремней безопасности.
Также службам спасения передается информация, полученная диспетчером при разговоре с водителем.
Сегодня ГЛОНАСС — это не просто навигатор, который позволит не потеряться на незнакомых дорогах. Возможности спутникового позиционирования куда шире, и воспользоваться ими может как рядовой автовладелец, так и руководитель коммерческого предприятия с обширным парком автомобилей.
Изначально система ГЛОНАСС разрабатывалась для применения в оборонной промышленности, но со временем стала распространяться на потребительский рынок. Система навигации устанавливается для определения местонахождения животных, людей, багажа, а также осуществляется мониторинг аграрной техники, грузового, легкового, общественного транспорта.
Функции системы спутникового слежения
В настоящее время установка ГЛОНАСС в Краснодаре, Ставрополе, Ростове-на-Дону, Москве и других регионах России является необходимостью для сельскохозяйственной техники, перевозок, строительных компаний, инкассаторских, дорожных служб, коммерческих и других предприятий, а также для собственников с личным авто. С его помощью появляется возможность контролировать:
- Реальную скорость движения, соблюдение маршрута транспортного средства;
- Время, затраченное на стоянку и непосредственно выполненную работу. А также режим включения двигателя;
- Фактический расход, количество заправленного топлива;
- Текущее техническое состояние основных механизмов транспортного средства.
Регулярная связь и наличие тревожной кнопки обеспечивают безопасность транспортируемого груза и сопровождающих лиц. Благодаря этому оборудованию, повышается дисциплина водителя, сокращаются расходы на обслуживание, содержание машины.
Принцип работы системы следующий — со спутника поступает радиосигнал на терминал, закрепленный на объекте, а с него на компьютер, телефон или иное принимающее устройство владельца. В случае попытки угона, нарушения правил вождения или иной экстренной ситуации, сигнал мгновенно передается оператору. Блокировать двери и прекратить работу двигателя можно на любом расстоянии. Если техника находится в зоне, где сигнал недоступен, информация сохраняется в памяти прибора, а ее отправка происходит после восстановления связи.
Установка ГЛОНАСС на автомобиль
Монтаж оборудования в легковом транспорте в основном производится под торпедой, рядом с блоком предохранителей, для удобства подсоединения к сети и стабильного приема спутниковой связи. Крепление подбирается по модели авто. Для предотвращения вмешательства в работу прибора, корпус и подходы к питанию пломбируются.
На установку системы мониторинга в грузовых автомобилях уходит больше времени, из-за подключения дополнительных устройств (температурный датчик, кнопка экстренного вызова). Сложным этапом является монтаж контроллера уровня горючего.
Комплекс мероприятий может быть произведен специалистом, предоставленным профильным центром «Первая Мониторинговая Компания» во всех городах Российской Федерации. Он проведет демонтаж и сборку панели для закрепления навигационного оборудования. При необходимости установления датчика в топливный бак, на место доставляется специальное тарировочное оборудование, высверливается отверстие и он аккуратно врезается в емкость. После подключения к терминалу и калибровки точности измерения уровня, можно на расстоянии осуществлять контроль за расходом и наличием горючего.
По желанию заказчика подсоединяются дополнительные приборы слежения. Они предотвращают:
- Простой транспортного средства с работающим двигателем;
- Несанкционированное сливание горючего;
- Осуществление незапланированных грузовых и пассажирских перевозок;
- Несоблюдение температурного регламента в рефрижераторе;
- Отклонение от заданного маршрута.
Процесс монтажа занимает от 1 часа для легкового и до 4 для грузового автомобиля, в зависимости от сложности конструкции модели.
На оборудование и установку системы ГЛОНАСС компания дает гарантию. Если же Вы хотите самостоятельно провести работы по монтажу и не ошибиться в выборе устройства, у нас можно получить ценные рекомендации.
Стоимость установки системы мониторинга транспорта GPS|ГЛОНАСС Waliot
«Первая Мониторинговая Компания» предоставляет спектр услуг по продаже и монтажу системы ГЛОНАСС на автомобили. Прибор мониторинга осуществляет качественный контроль за местоположением транспорта и груза, находящегося в нем, позволяет следить за соблюдением графика перевоза, стилем вождения водителя и поддержанием скоростного режима. Благодаря программе Waliot, установленной на сервере, а также регулярной связи с трекером, информация о состоянии грузовой, либо пассажирской техники поступает оператору. К мониторинговому оборудованию прилагается комплект датчиков, осуществляющих слежение за:
- Температурой внутри холодильной установки;
- Нагрузкой на осевую часть машины;
- Наличием топлива в баке и его расходованием.
Терминал спутниковой навигации состоит из:
- Приемного устройства;
- Передатчика GPS;
- Разъемов для подключения дополнительных датчиков;
- Аккумуляторной батареи, которая обеспечит бесперебойную связь при отсутствии электропитания.
Цена на систему ГЛОНАСС включает в себя монтаж оборудования на автомобиль. Наши специалисты обеспечат регулярное обслуживание, своевременную диагностику и настройку оборудования. В случае неполадок, подкорректируют и восстановят рабочие функции прибора. Мы гарантируем соотношение стоимости и качества установки. Прайс на наши услуги представлен на странице Оборудование.
Принцип работы системы GPS ГЛОНАСС
6 Марта 2018Как работает система ГЛОНАСС мониторинга
Используя ГЛОНАСС/GPS оборудование, мы можем узнать местоположение и скорость транспорта. Сегодня термины ГЛОНАСС и GPS известны практически каждому. Используя ГЛОНАСС/GPS оборудование, мы можем в любой конкретный момент узнать о координатах контролируемого объекта, определить его скорость и направление движения. Но откуда берутся все эти данные? Каков принцип работы GPS ГЛОНАСC – подробнее в нашей статье.
Сегодня термины ГЛОНАСС и GPS известны практически каждому. Используя ГЛОНАСС/GPS оборудование, мы можем в любой конкретный момент узнать о координатах контролируемого объекта, определить его скорость и направление движения. Но откуда берутся все эти данные? Каков принцип работы GPS ГЛОНАСC?
Как работают системы GPS ГЛОНАСС
ГЛОНАСС/GPS системы состоят из трех элементов – космического, управляющего и пользовательского. Это:
· спутники, расположенные на околоземной орбите;
· управляющие станции и наземные антенны;
· устройства со встроенными приемниками ГЛОНАСС/GPS сигналов.
Кратко принцип работы GPS ГЛОНАСС можно описать так:
· Спутники поддерживают связь между собой и с наземной станцией, определяя свои координаты в пространстве и времени;
· Каждый спутник постоянно отправляет на землю радиосигналы, содержащие информацию о своих координатах и времени передачи сигнала;
· ГЛОНАСС/GPS приемник принимает сигналы с ближайших спутников, записывает время приемки каждого сигнала и его содержание, рассчитывает расстояние до спутников и на основании этих данных определяет свое местоположение по трем координатам – долготе, широте и высоте над уровнем моря. Для определения координат приёмник должен принимать сигнал как минимум четырёх спутников и вычислить расстояния до них.
Точность показаний совмещенных чипов ГЛОНАСС + GPS обычно не превышает 2-5 метров.
Как работает GPS ГЛОНАСС слежение за транспортом
Для отслеживания координат транспорта используются автомобильные трекеры, которые настраиваются на автоматическое получение сигналов от максимально-возможного количества ближайших спутников системы ГЛОНАСС и/или GPS.
Для обработки, хранения и анализа полученных данных трекеры подключается к системе спутникового мониторинга транспорта.
Принцип работы ГЛОНАСС GPS на автомобиле заключается в следующем:
- Трекер отслеживает и записывает во встроенную память изменяющиеся координаты спутников, выходит в интернет через сим-карту и отправляет информацию на телематический сервер;
- Сервер принимает полученные данные и сохраняет их в базе данных;
- Клиентский интерфейс системы позволяет обрабатывать сохраненную на сервере информацию, формировать маршруты на карте, строить различные отчеты о работе транспортных средств, вести рейтинг водителей по управлению транспортным средством.
В зависимости от потребностей бизнеса к трекеру можно подключить дополнительное оборудование: датчики уровня топлива, датчики температуры, датчики работы механизмов, маяки, закладки, подключаться к CAN шине (бортовому компьютеру) и т.п.
Чтобы узнать больше о принципах и возможностях работы ГЛОНАСС/GPS на транспорте – позвоните или напишите нам. Мы оценим потребности вашей компании и порекомендуем оптимальное оборудование. Кроме того, с удовольствием расскажем, как оптимизировать и другие задачи управления транспортом – автоматизировать планирование перевозок, выписку путевых листов, работу водителей и экспедиторов, управление имуществом автопарка.
Поделиться:
Просмотров: 6096
Система контроля транспорта не может состоять только из программного обеспечения. Это сложный комплекс аппаратно-программных средств, включающий в себя специальное телематическое оборудование. В Waliot оборудование делится на навигационное и дополнительное.
К навигационному оборудованию относятся автомобильные и ручные трекеры, бортовые блоки, аппаратура спутниковой навигации и GPS/ГЛОНАСС маяки, простым языком — это любой модуль, в котором совмещены приемник ГЛОНАСС/GPS сигнала и GSM-модуль, осуществляющий передачу данных, посредством GPRS на сервер мониторинга Waliot.
К дополнительному оборудованию мы отнесли следующие устройства: датчик уровня топлива с индикатором, датчик температуры, датчик мото-часов, датчик угла наклона, датчик приближения, датчик вращения, датчик сыпучих продуктов, CAN-адаптеры, устройство съема сигнала и система безоператорного автоматического отпуска топлива WaliotFUEL.
CAN-WAY
Навигационное оборудование
Цена-качество
* -Стоимость оборудования указана с НДС и монтажом.
Вас не устраивает текущее обслуживание?
У Вас постоянные конфликты с поставщиком?
Вам не хотят идти на встречу?
К Вам приезжают с опозданиями не в оговоренное время, а то и вовсе постоянно переносят выезд?
Просто смените поставщика системы ГЛОНАСС | GPS мониторинга на Waliot!
Особенности эксплуатации системы GPS навигации
Наличие трекера ГЛОНАСС дает возможность оператору контролировать техническое состояние транспортного средства, безопасность пассажиров, водителей и перевозимого груза. С помощью терминала можно отследить:
- Отклонение от маршрута;
- Внеплановые остановки и простои;
- Несоблюдение скоростного режима.
В случае нарушения водителем правил дорожного движения, попытке незаконного проникновения или иных подобных ситуациях, диспетчер может заблокировать двери, прекратить подачу топлива, что вызовет остановку автомобиля. По желанию клиента к терминалу ГЛОНАСС устанавливаются и подключаются дополнительные датчики, с помощью которых отслеживается:
- Контроль за расходом топлива;
- Давление на ось;
- Соблюдение температурного режима в рефрижераторе;
- Степень агрессивности вождения;
- Микрофон для поддержания регулярной связи с оператором.
Мониторинг залива и использования горючего позволяет избежать непредвиденных ситуаций и предотвратить незаконный слив, что сэкономит время и средства.
Монтаж системы ГЛОНАСС на автомобиль
«Первая Мониторинговая Компания» продает и устанавливает приборы наблюдения в Краснодаре, Крыму, Москве, Волгограде, Ставрополе и других регионах РФ на грузовой, пассажирский транспорт, спецтехнику и иные объекты. Благодаря прибору владелец постоянно получает информацию о техническом состоянии и безопасности средства передвижения. В состав бортового блока входит:
- Приемник, определяющий координаты;
- Передатчик, отправляющий сведения диспетчеру;
- Отвечающая за качество связи антенна;
- Контакты для подсоединения дополнительных датчиков;
- Аккумулятор, гарантирующий постоянную работу без сетевого подключения до 6 часов.
Корпус GPS терминала ГЛОНАСС сделан из прочного материала, который защищает от ударов и других внешних воздействий, а встроенная память сохраняет данные за период в 40 суток.
Прибор устанавливается квалифицированным сотрудником «ПМК», который имеет профессиональные навыки в этом направлении. Основное оборудование крепится в передней части панели, а остальные детали в местах по назначению. Врезание датчика в бак для топлива проводится на открытой местности. Для обеспечения безопасности, горючее сливается, в случае необходимости, емкость демонтируется. По окончании работы, разъемы и корпус пломбируются.
В цену на систему слежения ГЛОНАСС Waliot входит выезд специалиста для проведения монтажа, подключение датчиков, а также гарантийного ремонта. Стоимость самого устройства зависит от фирмы изготовителя и функциональных особенностей.
Купить ГЛОНАСС для автомобиля
В России не составляет труда — обратитесь в «Первую Мониторинговую Компанию», наши специалисты помогут вам повысить уровень логистики курьерской доставки, такси и других служб!
В век информационных технологий каждый человек получает огромное количество информации разного рода. Самые эффективные люди – это те, кто умеют её структурировать, выявлять главное. Система ГЛОНАСС/GPS мониторинга транспорта имеет широчайший функционал, но по факту реальные управленческие решения принимаются на основе 5-10 показателей, групповых или индивидуальных. При этом не каждый даже задумывается, для чего устанавливает оборудование для ГЛОНАСС/GPS мониторинга транспорта, какую конкретную цель достигнет компания, внедрив данный продукт.
Изначальной мотивацией у многих является примитивные задачи:
- хочу знать где моя машина;
- хочу знать сколько топлива реально тратиться;
- хочу знать, не сливает ли водитель топливо.
Мы изначально , внедряя продукт, ставим очень измеряемую задачу:
«Снижение стоимости эксплуатации транспорта (1 км. пути)».
Как его посчитать? Использовать отчёты и цифры из них! В данной статье мы изучим программное обеспечение Stavtrack Online, а именно модуль отчёты.
Типы отчётов системы ГЛОНАСС/GPS мониторинга.
Нужно сразу оговорить, что для формирования отчётной информации, необходимо собрать шаблон. Потребности Клиентов из разных отраслей абсолютно разные и ключевые модули , соответственно, также отличаются. Обычно при начале внедрения продукта, наш специалист совместно с Клиентом, в зависимости от сформулированных задач. Формируются шаблоны, по которым в дальнейшем в пару кликов можно будет получить нужные цифры.
Как сформировать шаблон отчёта?
В первую очередь необходимо понять, что будет являться основой?
Это полный перечень типов сущности в системе мониторинга, по которым можно сформировать шаблон отчёта. Самыми распространёнными всё-таки являются объекты и группы объектов.
Отчётные данные предоставляются в двух формах:
- табличная;
- графическая.
Шаблон редактируется в несколько кликов. Простое проставление галочек, перемещение блоков в списке, делает процесс настройки шаблона очень простым, даже для неопытных пользователей.
Итогом является понятный документ, который легко выгрузить в любой удобный формат (PDF, Excel и т.п.). Пример реального отчёта в формате PDF по ссылке ниже:
https://stavtrack.ru/files/mail/отчет_с_топливом.pdf
Период хранения информации.
Данные в системе Stavtrack Online хранятся в течение 400 дней. Т.е. отчёт можно сформировать за любой период времени, в рамках данного периода времени. Этого вполне достаточно для пост анализа, при этом позволяет сохранить низкую стоимость продукта, используя облачные серверные мощности.
Максимальное количество шаблонов отчётов.
В системе Stavtrack Online количество шаблонов отчётов не ограничено, но большое количество исходных данных не удобно для анализа. Мы рекомендуем сформировать типовые шаблоны для всех типов техники, используемых в автопарке. Например, отдельный шаблон отчёта для спецтехники, отдельный для грузовой, отдельный для легковой.
Автоматическая отправка отчётов.
В системе Stavtrack Online реализована функция автоматической отправки отчётов в удобное для Клиента время. Например, групповой отчёт по автопарку Вы будете получать в 9-00 на электронную почту. Каждый день, кроме выходных. Только самые важные цифры, без воды.
Вконтакте
Вконтакте
Программный комплекс Waliot позволяет в режиме времени, приближенному к реальному, контролировать состояние, местоположение и дополнительные функции всех транспортных средств и персонала Компании.
Современная картографическая подложка от партнера 2Gis, позволяет просматривать информация о местоположении контролируемого объекта с точностью «до дома». Также, в 78%, вы сможете получать не только достоверную информацию о направлении движения и скорости, но и наблюдать по какой полосе дороги движется транспортное средство.
Загрузив историю движения автомобиля за любой период времени получим его трек на карте с указанием нарушений на различных участках дорожной сети. В данном случае красным цветом обозначены превышения скоростного режима.
Когда водителю придет очередной штраф от ГИБДД, информацию об этом можно проверить в Waliot. Действительно ли он ехал с превышением скорости на указанном участке дороги?
Помимо прочего можно «проиграть» историю движения объекта на карте. Это часто актуально для того, чтобы отследить количество совершённых рейсов.
Преимущества спутникового мониторинга транспортных средств
- Автоматическое отслеживание маршрутов движения
- Контроль скоростных режимов
- Пресечение левых рейсов
- Выявление простоев с включенным двигателем вне мест работы и задержек в пути
- Снижение рисков угона автомобиля и хищения грузов
Система контроля ГЛОНАСС
«Первая Мониторинговая Компания» осуществляет установку системы контроля транспорта ГЛОНАСС в России и странах ближнего Зарубежья. Специальная техника, установленная в автомобиле, осуществляет полноценный контроль безопасности автотранспорта, определяет местоположение по данным с навигационных спутников, после чего в режиме он-лайн передает всю необходимую информацию диспетчеру. Такая система обеспечивает не только привычный контроль перемещения автотранспорта, но и открывает возможности полноценного слежения за средством передвижения.
Система ГЛОНАСС для контроля транспорта Waliot, помимо отслеживания маршрута и местоположения авто, также осуществляет контроль за уровнем топлива, состоянием авто и т.д. Сигнал поступает диспетчеру в он-лайн режиме, поэтому справедливо будет отметить, что современные навигационные системы контроля выполняют значительно больше функций, чем при условиях привычного мониторинга автомобилей. Сегодня ГЛОНАСС оборудование дает возможность диспетчеру оперативно осуществлять ряд необходимых действий при возникновении чрезвычайных дорожных ситуаций.
При осуществлении контроля за транспортным средством, диспетчер в любое время может установить голосовую связь с водителем, а также выполнить при необходимости определенные удаленные действия, например, заглушить двигатель авто и так далее. Такие расширенные возможности контроля за транспортом позволяет не только получать доскональную информацию обо всех возникших проблемах или нарушениях, но и своевременно проводить их устранение.
Преимущества использования систем ГЛОНАСС/GPS контроля:
- Повышение конкурентоспособности компании;
- Улучшение качества предлагаемых транспортных услуг;
- Уменьшение затрат на содержание автотранспорта;
- Обеспечение безопасной работы водителей, перевозок пассажиров и сохранности особо важных грузов;
- Удаленное управление авто и своевременное разрешение чрезвычайных дорожных ситуаций.
Системы мониторинга ГЛОНАСС также наглядно показывают экономическую выгоду для предприятий, на которых они используются. По результатам проведенных исследований было выявлено, что уже в первый месяц пользования ГЛОНАСС технологиями, денежные затраты на ремонтные услуги автотранспорта сокращаются на 15%, а расходы на топливо — на 25%.
ГЛОНАСС контроль транспорта и его развитие в России
Сегодня правительство России способствует развитию технологии ГЛОНАСС системы и ее широкому распространению на рынке контроля транспорта. Спутниковые системы ГЛОНАСС и GPS, высокоскоростной интернет и цифровая телефонная связь позволяют вывести систему управления и контроля за средствами передвижения на абсолютно новый уровень.
Благодаря системе контроля автотранспорта ГЛОНАСС, Вы сможете при необходимости получить полную информацию о маршруте, местонахождении и техническом состоянии средства передвижения. Подобный мониторинг активно используется как в рамках отдельных предприятий, так и в масштабах регионального транспортного комплекса.
ГЛОНАСС мониторинг позволяет решать целый спектр разносторонних задач, связанных с обеспечением контроля за транспортом — как узкоспециализированных, так и типовых. Из этого можно сделать вывод, что использование услуги спутникового слежения за автотранспортом, делает автоматизированным процесс контроля управления и дает возможность любому предприятию обеспечить безопасность перевоза особо важных грузов, а также следить за действиями водителей в любом месте в определенный промежуток времени.
Спутниковый мониторинг транспорта получил широкое распространение благодаря возможности оптимизировать затраты и повысить эффективность работы автомобилей. Системы отслеживания повышают ответственность и уровень дисциплины водителей, сокращая переменные расходы на топливо.
Система мониторинга транспорта отражает следующие показатели: скорость и направление движения, момент остановки, включения зажигания и прочее. Рассмотрим виды спутникового мониторинга авто.
Системы мониторинга транспорта – составляющие элементы:
– ГЛОНАСС/GPS трекер – устанавливается на автомобиле, получает сведения координат от спутников, которые передаются на сервер. Терминал предоставляет полную информацию о местоположении объекта. Полученные сведения передаются через сети GSM, посредством установленной в нём сим-карты.
– Программно-аппаратный комплекс – своеобразный серверный центр, который отвечает за поступление, переработку, анализ и хранение полученных данных;
программный терминал – работает в режиме онлайн, принимает все сведения, передаваемые центральным сервером.
Разработка видов систем мониторинга зависит от прогресса в таких областях:
– спутниковые системы ГЛОНАСС/GPS;
– системы радиосвязи;
– ГИС;
– оборудование для мониторинга транспорта;
Виды популярных систем отслеживания
Системы спутникового мониторинга автотранспорта – какую выбрать?
Аналитическая компания Berg Insight провела анализ деятельности рынка спутникового мониторинга грузового транспорта. По мнению экспертов компании, Россию и страны СНГ в ближайшие пару лет ждет внушительное развитие сферы телематических услуг.
Спутниковый мониторинг грузового транспорта установлен на более чем 2,5 миллионов людей. При этом среднегодовой темп роста популярности данной услуги увеличивается на 22,2%. Таким образом, к 2017 году количество использующих спутниковый мониторинг увеличится до 6 миллионов.
Рынок систем отслеживания насчитывает сразу несколько ведущих поставщиков услуги, одним из которых является компания Gurtam. Компания зарекомендовала себя, как надежного поставщика, подкрепив качество услуг десятилетним стажем работы.
Gurtam признан лидером в своей отросли, деятельность более 400 000 автомобилей беспрерывно отслеживается компанией. Компания обеспечивает постоянный контроль над местоположением транспорта и постоянную связь с объектом.
Важными поставщиками услуги является турецкая компания Arvento Mobile Systems и российская компания Техноком. Спутниковый мониторинг транспортных средств используется не только на внутреннем рынке, но и на территории стран Восточной Европы.
Системы мониторинга компаний обрабатывают информацию о времени водителя в пути, скоростных режимах, времени работы оборудования, информация о заправке и сливе топлива. Спутниковый мониторинг автотранспорта защищает машину от угона. Непрерывное поступление данных позволяет мгновенно реагировать на любые нарушения или попытки несанкционированного доступа к ТС.
К числу популярных компаний спутникового мониторинга так же относятся следующие:
– Omnicomm;
– Антор;
– Ритм;
– Автоскан;
– Форт-Телеком;
– Спэйс Тим;
– Галилео Скай;
– Глосав.
Основные задачи, решаемые комплексом ГЛОНАСС/GPS мониторинга являются:
– для грузоперевозок – отслеживается пробег, скоростной режим, контроль расхода топлива, контроль соблюдения маршрута и прочее;
– для строительных компаний – контроль работы или состояния различных механизмов транспорта;
– для сельскохозяйственных организаций – основным критерием является контроль использования топлива, технологической скорости;
– речной и морской транспорт – координация перемещения буксиров, катеров, плавучих кранов.
Существуют следующие виды схем, по которым работает система:
– базовая – терминалы передают полученные сведения на главный сервер с использованием сети интернет. Наиболее бюджетный и простой спутниковый мониторинг автомобилей;
– схема 2 – используется в случаях, когда необходима высокая защита данных. При ее организации все компоненты системы находятся в контролируемой сети. Для передачи данных не используются интернет, альтернативой служит оператор мобильной связи или физически выделенный канал;
– схема 3 – используется для транспорта, который совершает рейсы в зоны, где нет GSM-покрытия. Данные передаются через интернет. Терминалы собирают детальную информацию о деятельности автомобиля в течение всего пути. Во время выхода в зону Wi-fi, системы передает накопленные сведения на сервер;
– схема 4 – используется в тех случаях, когда нет инфраструктуры (интернета, покрытия сотовых операторов и прочее). GSM система мониторинга автотранспорта накапливает данные и передает их на локальный сервер, откуда они транслируются в офис клиента, предоставляю полную информацию о работе автомобиля.
На что следует опираться при выборе системы?
Системы спутникового мониторинга автотранспорта имеет существенные различия между собой. Некоторые из них обладают теми функциями, которых лишены другие. И наоборот. Поэтому при выборе рекомендуется опираться на критично важные аспекты, которые необходимо контролировать.
Спецтехника ориентируется на показатели контроля заправки и слива топлива. Компании-перевозчики делают акцент на показателях пробега и направления движения транспорта.
Критерием выбора так же является стоимость системы. Низкая цена является показателем низкого качества и наличием недоработок. Но и высокая стоимость не может гарантировать высокую эффективность.
Преимущества использования спутникового gsm мониторинга транспортных средств от компании “Ставтрэк”:
1) увеличение эффективности работы транспорта;
2) более высокий уровень безопасности в дороге;
3) оптимизация маршрутов;
4) предотвращение нецелевого использования машин;
5) снижение риска опоздания при доставке груза;
6) сокращение пробега в среднем на 27%;
7) сокращение телефонных разговоров между водителем и диспетчером на 45%;
8) сокращение простоя в автопарке на 9%;
9) контроль выполненных работ;
10) контроль движения и остановок;
11) регулярное обновление программного обеспечения;
12) контроль стиля вождения;
13) отображение технического состояния транспорта;
14) ведение журнала каждой поездки;
15) контроль времени на выгрузку груза;
16) отчет о тревожных событиях;
17) отображение всех данных на карте в режиме реального времени.
Вконтакте
Глонасс История
Первое предложение по использованию спутников для навигации было сделано В.С.Шебашевичем в 1957 году. Эта идея родилась в ходе исследования возможного применения радиоастрономических технологий для аэронавигации. Дальнейшие исследования были проведены в ряде советских учреждений для повышения точности определений навигации, глобальной поддержки, ежедневного применения и независимости от погодных условий. Результаты исследований были использованы в 1963 году для научно-исследовательского проекта первой советской низкоорбитальной системы «Цикада».В 1967 году был запущен первый навигационный советский спутник «Космос-192». Навигационный спутник обеспечивал непрерывную передачу радионавигационного сигнала на частотах 150 и 400 МГц в течение своего активного срока службы.
Система из четырех спутников «Цикада» была введена в эксплуатацию в 1979 году. Навигационные спутники были выведены на круговые орбиты высотой 1000 км с наклоном 83 ° и равномерным распределением орбитальных плоскостей к экватору. Это позволило пользователям получать один из спутников каждые полтора часа или два и фиксировать положение в течение 5-6 минут после сеанса навигации.В навигационной системе «Цикада» использовались односторонние измерения дальности от пользователя до спутника. Наряду с совершенствованием бортовых систем и навигационного оборудования спутника большое внимание уделялось повышению точности определения и прогнозирования параметров навигационных спутниковых орбит.
Позже приемное измерительное оборудование было размещено на спутниках «Цикада» для обнаружения радиомаяков бедствия. Спутники получают эти сигналы и ретранслируют их на специальные наземные станции, где производится расчет точных координат аварийных объектов (кораблей, самолетов и т. Д.).) был проведен Спутники «Цикада», следящие за радиобуями бедствия, образовали систему «Коспас», которая вместе с американо-французско-канадской системой «Сарсат» создала интегрированную поисково-спасательную службу, которая спасла несколько тысяч жизней. Космическая навигационная система «Цикада» (и ее модернизация «Цикада-М») была разработана для навигационной поддержки военных пользователей и использовалась с 1976 года. В 2008 году пользователи «Цикада» и «Цикада-М» начали использовать систему ГЛОНАСС и работа этих систем была остановлена.Для низкоорбитальных систем было невозможно удовлетворить требования большого числа пользователей.
Успешная эксплуатация низкоорбитальных спутниковых навигационных систем морскими пользователями привлекла широкое внимание к спутниковой навигации. Навигационная система общего назначения была необходима для удовлетворения требований подавляющего большинства потенциальных пользователей.
На основании всестороннего исследования было решено выбрать орбитальное созвездие, состоящее из 24 спутников, равномерно распределенных в трех орбитальных плоскостях, наклоненных под углом 64.8 ° к экватору. Спутники ГЛОНАСС размещены на приблизительно круговых орбитах с номинальной высотой орбиты 19 100 км и периодом обращения 11 часов 15 минут 44 секунды. Благодаря значению периода стало возможным создать устойчивую орбитальную систему, которая в отличие от GPS не требует поддержки корректирующих импульсов в течение своего активного срока службы. Номинальный наклон обеспечивает глобальную доступность на территории Российской Федерации, даже если несколько СВ не работают.
При проектировании навигационной системы на высокой орбите возникли две проблемы.Первый касался взаимно синхронизированных временных шкал спутников с точностью до миллиардных долей секунды (наносекунд). Это стало возможным благодаря бортовым цезиевым эталонам на высокой орбите с номинальной стабильностью при 10 -13 и наземному эталону водорода с номинальной стабильностью при 10 -14 , а также благодаря наземным средствам сравнения шкалы времени с погрешностью 3- 5 нс Вторая задача касалась высокоточного определения и прогнозирования параметров орбиты навигационного спутника.Эта проблема была решена с помощью научных исследований факторов второго порядка бесконечно малых, таких как световое давление, неравномерность вращения Земли и полярных движений и т. Д.
Летные испытания российской высшей орбитальной спутниковой навигационной системы ГЛОНАСС начались в октябре 1982 года с запуска спутника «Космос-1413». Система ГЛОНАСС была официально объявлена работоспособной в 1993 году. В 1995 году она была переведена в полностью работоспособное созвездие (24 спутника ГЛОНАСС первого поколения).Большой недостаток, на котором следовало сосредоточиться, заключался в отсутствии гражданского навигационного оборудования и гражданских пользователей.
Сокращение финансирования космической промышленности в 1990 году привело к деградации созвездия ГЛОНАСС. В 2002 году созвездие ГЛОНАСС состояло из 7 спутников, которых было недостаточно для обеспечения навигационной поддержки территории России даже при ограниченной доступности. ГЛОНАСС отставал от GPS по точностным характеристикам, активный срок службы СВ составлял 3-4 года.
Ситуация улучшилась, когда в 2002 году была принята и запущена федеральная программа «Глобальная навигационная система на 2002–2011 годы».
В рамках этой федеральной программы были достигнуты следующие результаты:
- Система ГЛОНАСС была сохранена, модернизирована и стала функционировать в составе спутников «ГЛОНАСС-К». В настоящее время существуют две действующие глобальные навигационные спутниковые системы: GPS и ГЛОНАСС .
- Сегмент наземного управления был модернизирован, что вместе с орбитальным созвездием обеспечивает характеристики точности на уровне, сопоставимом с GPS
- Модернизирован Государственный эталон средств времени и частоты и средств определения параметров вращения Земли.
- Разработаны опытные образцы GNSS, большое количество схем приемных и измерительных модулей активной зоны, оборудование PNT для гражданского и специального назначения и связанные с ними системы
В настоящее время существует все более широкий спектр применения технологий GNSS.Для удовлетворения потребностей пользователей необходимо постоянно совершенствовать систему ГЛОНАСС, а также навигационное оборудование пользователя. Прежде всего, это относится к высокоточным приложениям ГЛОНАСС, где необходима точность в реальном времени на уровне дециметра и сантиметра. Это также относится к приложениям, связанным с безопасностью и сохранностью воздушного, морского и наземного транспорта. Необходима большая эксплуатационная эффективность навигационных решений и устойчивость к помехам ГЛОНАСС. Существует значительное количество специальных и гражданских применений, где малый размер и высокая чувствительность навигационного приемного оборудования имеют решающее значение.
Для решения новых задач в новых условиях в соответствии с Постановлением Правительства № 189 от 3 марта 2012 года в 2012 году была запущена новая федеральная программа «ГЛОНАСС: поддержка, развитие и использование на 2012–2020 годы».
Начиная с 2012 года система ГЛОНАСС движется в направлении эффективного решения задач PNT на благо обороны, безопасности и социально-экономического развития страны в ближайшем и отдаленном будущем.
Новая федеральная программа предусматривает следующее:
- Поддержка ГЛОНАСС с гарантированными показателями на конкурентном уровне
- Развитие ГЛОНАСС в направлении расширения возможностей с целью достижения паритета с международными навигационными спутниковыми системами и лидерства Российской Федерации в спутниковой навигации
- ГЛОНАСС используют как на территории Российской Федерации, так и за ее пределами
Уровень повышения возможностей ГЛОНАСС определяется рядом направлений развития, основными из которых являются следующие:
- Разработка структуры орбитального созвездия ГЛОНАСС
- Переход на использование навигационных спутников нового поколения «ГЛОНАСС-К» с расширенными возможностями
- Развитие сегмента наземного управления ГЛОНАСС, включая расширение орбиты и тактового сегмента ГЛОНАСС
- Дизайн и разработка дополнений:
- Система дифференциальной коррекции и мониторинга
- Глобальная система высокоточного определения навигационной и орбитальной и часовой информации в режиме реального времени для гражданских пользователей
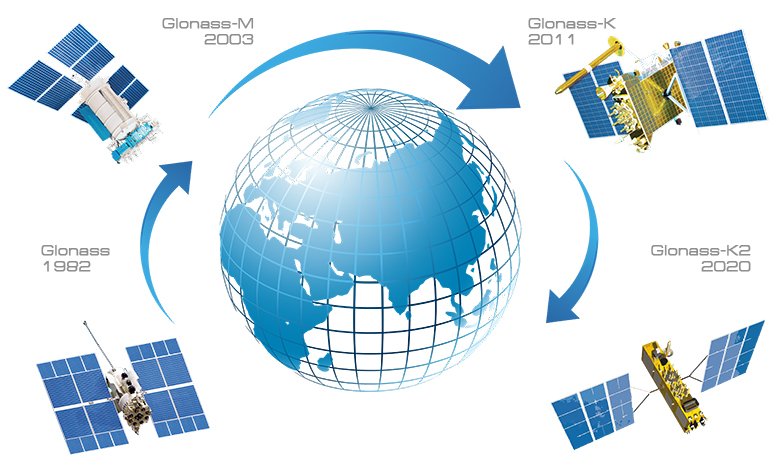
Развитие системы ГЛОНАСС для удовлетворения растущих требований пользователей и повышения конкурентоспособности системы в основном определяется возможностями космического сегмента ГЛОНАСС.Улучшения возможностей благодаря поколениям спутников ГЛОНАСС перечислены в таблице ниже.
Возможности | Глонасс | Глонасс-М | Глонасс-К | Глонасс-К2 |
|---|---|---|---|---|
| Время развертывания | 1982-2005 | 2003-2016 | 2011-2018 | 2017+ |
| Статус | выведен из эксплуатации | Используется | Проект созревания на основе проверки на орбите | В разработке |
| Номинальные параметры орбиты | Круговой | |||
| Количество спутников в созвездии (используется для навигации) | 24 | |||
| Количество орбитальных плоскостей | 3 | |||
| Количество спутников в самолете | 8 | |||
| Пусковые установки | Союз-2.1б, Протон-М | |||
| Срок службы конструкции, лет | 3,5 | 7 | 10 | 10 |
| Масса, кг | 1500 | 1415 | 935 | 1600 |
| Габаритные размеры, м | 2,71х3,05х2,71 | 2,53х3,01х1,43 | 2,53х6,01х1,43 | |
| , Вт | 1400 | 1270 | 4370 | |
| Дизайн платформы | под давлением | Герметичный | без давления | без давления |
| Стабильность часов, согласно спецификации / соблюдается | 5 * 10 -13 /1 * 10 -13 | 1 * 10 -13 /5 * 10 -14 | 1 * 10 -13 /5 * 10 -14 | 1 * 10 -14 /5 * 10 -15 |
| Тип сигнала | FDMA | FDMA (+ CDMA для SV 755-761) | FDMA и CDMA | FDMA и CDMA |
| Сигналы открытого доступа (для сигналов FDMA приведены значения центральной частоты) | L1OF (1602 МГц) | L1OF (1602 МГц) L2OF (1246 МГц) L3OC (1202 МГц) для SV 755+ | L1OF (1602 МГц) L2OF (1246 МГц) L3OC (1202 МГц) L2OC (1248 МГц) для SV 17L + | L1OF (1602 МГц) L2OF (1246 МГц) L1OC (1600 МГц) L2OC (1248 МГц) L3OC (1202 МГц) |
| Сигналы ограниченного доступа | L1SF (1592 МГц) L2SF (1237 МГц) | L1SF (1592 МГц) L2SF (1237 МГц) | L1SF (1592 МГц) L2SF (1237 МГц) L2SC (1248 МГц) для SV 17L + | L1SF (1592 МГц) L2SF (1237 МГц) L1SC (1600 МГц) L2SC (1248 МГц) |
| Спутниковые перекрестные ссылки: RF | — — | + — | + — | + + |
| Поиск и Спасение | — | — | + | + |
GNSS, сигналов и приемников | IntechOpen
1. Введение
Навигационные решения стали частью нашей повседневной жизни благодаря их широкому применению в различных областях, включая сельское хозяйство, навигацию наземными транспортными средствами и пешеходную навигацию. Ключевой навигационной технологией, используемой в таких приложениях, являются глобальные навигационные спутниковые системы (GNSS), и несколько таких систем в настоящее время предоставляют эту услугу. Глобальная система позиционирования США (GPS) была первой такой полнофункциональной системой.Российская система ГЛОНАСС была второй по активности, и она также имеет глобальный охват. Точно так же спутниковая навигационная система Европейского союза Galileo должна быть полностью введена в эксплуатацию в 2018 году.
Хотя каждая из этих систем обладает уникальными характеристиками, все они имеют общие общие аспекты. У каждого есть космический сегмент, управляющий сегмент и пользовательский сегмент. Более того, все они основаны на однонаправленной передаче радиочастотных (РЧ) сигналов от спутников к приемникам на поверхности Земли и вблизи нее.Используя измерения, полученные из этих сигналов, приемник GNSS может найти свое решение для определения местоположения, скорости и времени (PVT). Более того, все системы GNSS используют понятие ранжирования по времени прибытия (TOA). Для этого необходимо измерить время прохождения сигнала и интервал времени, в течение которого сигнал проходит между спутником и приемником, для расчета дальности между приемником и спутником [1]. Расстояние от передатчика до приемника можно затем умножить на время прохождения сигнала на скорость света.
В этой главе представлен обзор системы глобального позиционирования (GPS) и ГЛОНАСС и их сигналов. Во-первых, он описывает архитектуру системы в терминах трех основных сегментов: контроль, пространство и пользователь. Затем рассматриваются новые характеристики сигналов гражданского и военного GPS, подчеркивая их значимость. После этого кратко обсуждаются источники ошибок измерения GPS. В этой главе также рассматриваются основные аспекты системы ГЛОНАСС, включая характеристики сигнала ГЛОНАСС, программу модернизации ГЛОНАСС, план радиочастот (РЧ) ГЛОНАСС, коды ранжирования псевдослучайных (PR) и навигационное сообщение внутрисистемных помех.Наконец, перечислены преимущества объединения GPS и ГЛОНАСС, чтобы дать читателю представление о преимуществах такой интеграции.
2. Обзор GPS
GPS предоставляет услуги трехмерного позиционирования и навигации для гражданских и военных пользователей [2]. Приемники GPS используют диапазон TOA для генерации псевдодальности кода для определения местоположения пользователя. Они также отслеживают изменения частоты сигнала, чтобы определить скорость изменения диапазона измерений для определения скорости [3].Время между передачей сигнала и его прибытием в приемник измеряется. Расстояние от передатчика до приемника может быть затем получено путем масштабирования времени прохождения сигнала на скорость света. Используя концепцию трилатерации, приемник GPS может определить свое местоположение, используя измеренное время в пути, а также местоположение спутников, полученное из навигационного сообщения, передаваемого сигналом. Хотя для определения местоположения пользователя могут использоваться три спутника, требуется по крайней мере четыре из-за дополнительной оценки смещения тактового сигнала приемника.
На рисунке 1 показана концепция определения местоположения путем трилатерации с использованием диапазона до трех спутников. Использование четырех спутников для определения местоположения повышает точность решения за счет устранения смещения тактового сигнала приемника. Первое и второе измерения дальности от пользователя к спутнику определяют две сферы на двух разных спутниках, а пересечение этих двух сфер определяет круг возможных положений приемника. Третье измерение диапазона, пересекающееся с первыми двумя, сужает эти позиции приемника до неоднозначной пары, в то время как четвертое измерение разрешает эту неоднозначность и определяет смещение тактового сигнала.Уравнения позиционирования GPS приведены в [1, 2, 3, 4, 5, 6]. Военные GPS-сигналы более устойчивы к помехам и подделке, чем гражданские сигналы [3]; следовательно, позиция, определяемая военными сигналами, является более точной, чем позиция, определенная с использованием гражданских сигналов.
Рисунок 1.
Концепция определения местоположения путем трилатерации с использованием сигналов от трех спутников. Положение пользователя обозначено красной точкой [4].
3. Структура GPS
Как упоминалось ранее, GPS состоит из трех сегментов [7]: космического сегмента, созвездия спутников, вращающихся вокруг Земли на очень больших высотах; контрольный сегмент, состоящий из группы наземных станций управления; и пользовательский сегмент, пользовательское оборудование или просто множество военных и гражданских приемников.Рисунок 2 иллюстрирует три сегмента, которые обсуждаются более подробно в этом разделе.
Рисунок 2.
Сегменты GPS [8].
3.1. Космический сегмент
Космический сегмент GPS состоит из группировки спутников, которая непрерывно передает радиосигналы пользователям. В последние годы ВВС США эксплуатировали 32 спутника GPS, из которых 24 доступны в 95% случаев [4]. Спутники GPS движутся по средней околоземной орбите (MEO) на высоте приблизительно 20 200 км, и каждый из них облетает Землю два раза в день, что означает, что период обращения составляет приблизительно 12 ч [7].Эти спутники распределены по шести равноотстоящим орбитальным плоскостям, каждая из которых имеет целевой наклон 55 ° [6]. Это распределение спутников, которое улучшает видимость спутников для пользователей GPS по всему земному шару, тем самым повышая точность навигации. Спутники GPS передают радиочастотные сигналы, содержащие кодированную информацию и навигационные данные, что позволяет приемнику рассчитывать псевдодальности и доплеровские измерения для оценки положения, скорости и времени.
В июне 2011 года ВВС США успешно расширили свое созвездие GPS, известное как конфигурация «Расширяемая 24» [9].Три из 24 слотов были модернизированы, а шесть спутников были перемещены; Таким образом, три дополнительных спутника были добавлены в созвездие. GPS-созвездие с 27 слотами улучшило видимость спутника по всему миру. В таблице 1 обобщены характеристики нынешнего и будущих поколений спутников GPS, включая Блок IIA (второе поколение, «Расширенный»), Блок IIR («Пополнение»), Блок IIR (M) («Модернизированный»), Блок IIF (« Follow-on ») и GPS III [10].
Таблица 1.
Особенности нынешнего и будущих поколений спутников GPS [10].
3.2. Сегмент управления
Состоящий из глобальной сети наземных средств, которые отслеживают спутники GPS, основными задачами сегмента управления GPS являются управление и обслуживание системы посредством мониторинга и анализа передач сигналов и отправки команд и обновлений данных в созвездие GPS.
Ссылаясь на [7], текущий сегмент оперативного управления включает в себя главную станцию управления (MCS), альтернативную главную станцию управления, 12 командных и управляющих антенн и 16 пунктов мониторинга.Расположение этих объектов показано на рисунке 3.
Рисунок 3.
Расположение главного пункта управления GPS, альтернативного главного пункта управления, 12 командных и контрольных антенн и 16 пунктов мониторинга [11].
3.3. Пользовательский сегмент
Пользовательский сегмент представлен широким спектром типов приемников GPS. Они захватывают и отслеживают спутниковые сигналы и обрабатывают сигналы, передаваемые спутниками GPS, оценивают диапазоны от пользователя к спутнику и скорости передачи и вычисляют решение PVT [12].Приемник GPS стоил более 100 000 долларов в середине 1980-х годов; в настоящее время на рынке имеется встроенный приемник стоимостью менее 20 долл. США, и, по оценкам, с 1997 года ежегодно выпускается более 1 миллиона приемников [1]. Поскольку GPS доступен для пользователей бесплатно, они могут использовать приемники в любое время и в любом месте по всему миру для определения своего положения [6].
4. Характеристики сигнала GPS
Спутники GPS производят центральную частоту L-диапазона 10,23 МГц с использованием очень стабильных тактовых импульсов.Затем спутники умножают эту частоту на 154 и 120, чтобы сформировать две несущие частоты на L1 = 1575,42 МГц и L2 = 1227,60 МГц [13]. Сигналы GPS состоят из несущего сигнала с частотой L1 или L2, уникального кода, назначенного каждому спутнику, и сообщения данных, передающего информацию о положении спутника, скорости и тактовом сдвиге. Две несущие частоты модулируются комбинацией сообщения данных и уникального кода для передачи требуемой информации пользователю. Частота L1 модулируется двумя сигналами кода ранжирования: грубым кодом / кодом сбора данных (C / A) и точным (P) кодом [2].
Каждый спутник имеет уникальный код C / A PRN, и все эти коды PRN практически ортогональны друг другу, что позволяет приемнику GPS различать спутники, даже если спутники вещают на одних и тех же двух несущих частотах L1 и L2. [14]. Каждый код C / A повторяется каждую миллисекунду и имеет длину 1023 бита. Длительность каждого чипа в коде C / A составляет около 1 мс, а скорость кодирования составляет 1,023 МГц (или мегапикселей в секунду (Мбит / с)) с длиной волны около 300 м. Продолжительность кода P составляет около 7 дней, и он модулирует как L1, так и L2.Этот код, используемый только военными, имеет скорость в 10,23–10 раз выше, чем у кода C / A. Длина волны кода P составляет около 30 м, что делает его намного короче и, следовательно, намного более точным, чем код C / A [2].
Последняя ключевая часть сигнала GPS — это навигационное сообщение. Для получения всего сообщения, которое загружается со скоростью 50 бит / с, требуется 12,5 минуты [6]. Его наиболее важными частями являются эфемериды, данные альманаха и параметры смещения спутниковых часов.
Чтобы подготовить сигнал GPS для передачи через спутник, сначала применяется операция XOR для объединения двоичного навигационного сообщения с кодом.Если бит сообщения и кодовый чип совпадают, результат равен 0; если они различны, результат равен 1. Во-вторых, объединенный сигнал объединяется с несущей с использованием модуляции с двоичной фазовой манипуляцией (BPSK): бит «0» оставляет сигнал несущей нетронутым, тогда как бит «1» вызывает сигнал умножается на -1 и смещает несущую на 180 °. Рисунок 4 иллюстрирует этот процесс.
Рисунок 4.
Структура сигнала GPS[15].
Как упоминалось выше, кодовые шаблоны PRN являются почти ортогональными, что является важным свойством, которое значительно облегчает процесс спутниковой идентификации [2].Два кода ортогональны, когда сумма их слагаемых произведений, произвольно сдвинутых друг относительно друга, почти равна нулю. Функция взаимной корреляции для спутников m и n с кодами PRN Ckand Cl выражается как
1011023Cki⋅Cli + n≈0, forallk ≠ lE1
Эта ортогональность делает кросс-спутниковые помехи малыми [14].
Другим важным свойством кодов PRN является то, что каждый шаблон PRN практически не связан с самим собой:
1011023Cki⋅Cki + n≈0, foralln≥1E2
Автокорреляция шаблона PRN практически равна нулю для любого сдвига n≥1.Однако, когда n равно нулю, функция достигает пика. Используя эту функцию, приемник сравнивает код PRN в принятом сигнале с локально сгенерированной копией того же кода, чтобы определить, какой спутник сгенерировал соответствующий сигнал.
5. Архитектура GPS-приемника
На рисунке 5 показана высокоуровневая архитектура GPS-приемника. Приемники GPS состоят из антенны, радиочастотного интерфейса, гетеродина и навигационного процессора. Первым элементом архитектуры приемника является антенна, которая должна быть способна принимать сигналы с правой круговой поляризацией (RHCP), потому что это тип сигнала, передаваемого спутниками GPS [1].Также важна диаграмма усиления антенны, которая показывает, насколько хорошо антенна работает при различных центральных частотах, поляризации и углах места.
Рисунок 5.
Архитектура высокого уровня GPS-приемников [16].
Предусилитель — это первый активный компонент, который идет после антенны. Он часто размещается в том же корпусе, что и антенный элемент. Поскольку антенна может принимать несколько полос частот, обычно на каждую полосу имеется один предварительный усилитель; тем не менее, один предусилитель может охватывать несколько полос.Основная функция предусилителя заключается в усилении сигнала на выходе антенны [3]. Предварительные усилители обычно имеют три компонента: (1) фильтр предварительного отбора, который устраняет внеполосные помехи и ограничивает ширину полосы шума, (2) защиту от выгорания, которая предотвращает возможные мощные помехи с электронными компонентами приемника, и (3) малошумящий усилитель (LNA). Сигналы GPS обычно очень слабые, около -160 дБВт или 10–6 Вт; таким образом, МШУ усиливает сигналы на 20–35 дБ, чтобы увеличить их до уровней, пригодных для обработки [17].
После антенны и МШУ идет интерфейс RF. Этот блок генерирует чистый дискретизированный сигнал для блока обработки сигналов [12]. Действительно, входные предварительные фильтры усиливают, преобразуют с понижением частоты и оцифровывают полученный сигнал.
Фильтрация имеет решающее значение по нескольким причинам: она отклоняет внеполосные сигналы, уменьшает шум в принимаемом сигнале и уменьшает влияние наложения. Сигналы с широкой полосой пропускания могут обеспечивать измерения с высоким разрешением во временной области, но требуют более высокой частоты дискретизации, в результате чего приемник потребляет гораздо больше энергии [18].Фильтр может смягчить это, разрешая узкополосные сигналы.
Преобразование с понижением частоты — это процесс, выполняемый внешним интерфейсом для понижения частоты радиочастотного сигнала до промежуточной частоты или непосредственно до основной полосы частот [3]. Это необходимо для облегчения процессов отбора проб и фильтрации. Преобразование с понижением частоты часто выполняется с использованием микшера, который умножает принятый сигнал на локально сгенерированную реплику и затем фильтрует выходной сигнал для удаления двухчастотных членов [1], как показано на рисунке 6.Фильтрация и преобразование частоты сигналов с понижением частоты, как правило, осуществляются в несколько последовательных этапов из-за сложности реализации стабильного полосового фильтра с высокой центральной частотой.
Рисунок 6.
Структурная схема двухкаскадного понижающего преобразования.
Последним этапом обработки сигнала внутри РЧ-интерфейса является преобразование аналогового сигнала в цифровой сигнал. Полосовая дискретизация завершает как дискретизацию, так и преобразование сигнала с понижением частоты [12].
GPS-приемникипроводят свои измерения, используя оценки TOA сигнала и фазы и частоты принимаемой несущей. Один местный опорный генератор (смотрите рисунок 4) формирует все ссылки частоты в приемнике [19]. Поскольку генератор имеет решающее значение для производительности приемника, особое внимание должно быть уделено его размеру, потребляемой мощности, стабильности (как в краткосрочной и долгосрочной перспективе), так и его чувствительности к температуре и вибрации [3]. В некоторых случаях приемники GPS имеют несколько опорных частот для преобразования с понижением частоты.В этих случаях каждому смесителю требуется точная опорная частота. Процесс получения опорных частот в приемнике из локального генератора называется синтезом частот, в котором используется комбинация умножения целых и дробных частот [20].
На рисунке 4 показано, что последний этап GPS-приемника — это навигационный процессор. Этот блок получает условный сигнал (выходной сигнал переднего конца). Этот отфильтрованный и преобразованный с понижением сигнал должен содержать всю необходимую информацию, передаваемую сигналом, когда он был принят антенной.На этапе обработки навигации приемник извлекает измерения для псевдодальности и скорости изменения псевдодальности для всех видимых спутников и, используя их, оценивает решение PVT для антенны.
Процесс навигации обычно происходит в два этапа: во-первых, оцениваются скорости псевдодальности и псевдодальности для каждого спутника; во-вторых, информация о местоположении, скорости и времени пользователя оценивается с помощью этих измерений. Обработка сигналов на этом уровне, в свою очередь, может быть разделена на следующие этапы [12]:
Сбор сигналов: это включает в себя обнаружение сигналов от видимых спутников и обеспечивает приблизительную оценку задержки кода и доплеровской частоты. входящего сигнала от каждого спутника.
Отслеживание сигнала: Это рекурсивный процесс оценки, который постоянно обновляет оценки изменяющихся во времени параметров сигнала.
Мониторинг сигнала: это одновременно с отслеживанием и включает оценку нескольких параметров, включая отношение несущей к шуму (C / N 0 ). Приемник использует контроль сигнала, чтобы решить, например, когда происходит потеря блокировки сигнала.
Извлечение навигационных сообщений: этот процесс также происходит параллельно с отслеживанием сигналов.Извлечение навигационного сообщения включает декодирование спутниковых эфемерид.
Генерация измерений: использует параметры отслеживания для оценки дальностей и скорости изменения дальности для всех видимых спутников.
PVT-решение: использует диапазон и оценку скорости изменения диапазона для вычисления требуемого навигационного решения.
6. Измерения GPS
При отслеживании спутникового сигнала приемник GPS отслеживает три параметра: псевдодальности, фазу несущей и допплер [7, 11].Псевдодиапазон рассчитывается путем измерения времени прохождения сигнала от спутника к приемнику и описывается как «псевдодиапазоны», поскольку эти измерения искажены смещением тактового сигнала спутника и приемника [6]. Измерения фазы несущей отслеживают разницу между фазами несущей для принятой и локально сгенерированной копии сигнала. Доплеровское измерение отражает скорость изменения фазы несущей [12].
7. Ошибки GPS
Сигналы GPS и измерения подвержены многим факторам помех, обычно известным как ошибки GP.Первый источник ошибок связан с дрейфом тактовых импульсов как спутника, так и приемника. Несмотря на их высокий уровень точности, спутниковые часы все еще немного отклоняются от времени GPS. По причинам доступности и размера часы приемника обычно намного дешевле; следовательно, они быстро отклоняются от времени GPS. Этот дрейф приводит к значительным ошибкам в диапазоне измерений приемника.
После того, как спутниковая антенна отходит, сигнал GPS должен пройти тысячи километров, чтобы достичь антенны приемника, а затем схемы приемника.Первая и более длинная часть этой поездки — пространство, где сигнал сохраняет свои характеристики. Однако, когда сигнал попадает в атмосферу, эта среда вызывает некоторые нежелательные эффекты. Два основных слоя атмосферы, а именно, ионосфера и тропосфера, соответственно, добавят задержки ко времени прохождения сигнала и, следовательно, вызовут некоторые ошибки в измерениях.
Как только он приближается к антенне приемника, сигнал обычно испытывает отражения и эхо, то есть он часто отражается от объектов рядом с приемником, вызывая его попадание на антенну с разных направлений — явление, известное как многолучевое распространение.Многолучевое распространение является одним из основных источников ошибок, наносящих вред сигналам GPS [6]. Все вышеупомянутые помехи являются результатом характера сигнала или среды распространения и считаются непреднамеренными. Преднамеренное ухудшение или замена сигнала во многих случаях является более проблемным источником ошибок GPS. Одним из основных типов преднамеренных ошибок является глушение сигнала. Застревание сигнала — это преднамеренная помеха, вызванная радиопередачей радиочастотных (РЧ) сигналов по соседству с приемником с целью предотвращения отслеживания истинных сигналов GNSS.
8. Обзор ГЛОНАСС
Как и GPS, ГЛОНАСС предлагает услуги трехмерного позиционирования и навигации как для гражданских, так и для военных пользователей. В этой системе пользователи также определяют свое положение и скорость, используя измерения псевдодальности и фазы несущей. Обе системы используют ранжирование по времени прибытия (TOA) для определения положения и скорости пользователя [21]. ГЛОНАСС включает в себя три компонента: совокупность спутников (эквивалентно космическому сегменту GPS), наземные станции управления (также эквивалентные сегменту управления GPS) и оборудование пользователя (также эквивалентное пользовательскому сегменту GPS) [22].Наземный сегмент состоит из главной станции управления (MCS). Пользовательский сегмент состоит из всех военных и гражданских приемников.
8.1. Космический сегмент ГЛОНАСС
Полное созвездие ГЛОНАСС состоит из 24 спутников [21]. Согласно [23], 26 функциональных спутников ГЛОНАСС-М находятся на орбите, и 22 из них находятся в эксплуатации, а еще четыре имеют резервный статус. С запуском нескольких спутников ГЛОНАСС-М и спутников ГЛОНАСС-К теперь доступна полная группа из 24 спутников.
ГЛОНАСС спутники окружают Землю в трех орбитальных плоскостях, равномерно распределенных на 120 °. Каждая плоскость имеет восемь спутников, которые разделены аргументом широты 45 °, и у этих спутников целевой наклон составляет 64,8 °, что значительно выше, чем у спутников GPS. Орбиты ГЛОНАСС очень круглые с эксцентриситетами, меньшими, чем у GPS, и ближе к нулю [24]. Спутники ГЛОНАСС имеют радиус 25 510 км, что дает высоту 19 130 км [22]. По сравнению с GPS, ГЛОНАСС имеет более короткий орбитальный период (11 ч 15 мин 40 с) из-за его меньшей высоты.Сравнение основных различий между ГЛОНАСС и GPS приведено в следующих разделах.
8.2. Сегмент управления ГЛОНАСС
Ключевой задачей станции управления ГЛОНАСС является синхронизация спутниковых часов со временем ГЛОНАСС и вычисление временного сдвига между временем ГЛОНАСС и UTC [3]. Он также загружает поправки часов, предсказанные эфемериды и данные альманаха на спутники ГЛОНАСС. Кроме того, этот сегмент отслеживает состояние текущего созвездия ГЛОНАСС и соответствующим образом корректирует параметры орбиты.ГЛОНАСС загружает свои навигационные данные на спутники два раза в день, в то время как это делается один раз в день с помощью GPS [25].
Сегмент наземного управления ГЛОНАСС состоит из двух основных частей: центра управления системой (SCC), расположенного в Москве, и сети станций слежения за командами (CTS), расположенных на всей территории бывшего Советского Союза (SU). Роли SCC и CTS схожи с функциями главной станции управления GPS и ее станций мониторинга [22].
8.3. Пользовательский сегмент ГЛОНАСС
Как и в случае с GPS, пользовательский сегмент ГЛОНАСС содержит приемное оборудование конечного пользователя, которое отслеживает и принимает спутниковые сигналы.Подобно приемникам GPS, они также обрабатывают сигналы, передаваемые видимыми спутниками, оценивают псевдодальность и скорость изменения псевдодальности по этим сигналам и вычисляют решение положения, скорости и времени (PVT).
9. Модернизация ГЛОНАСС
Конструкция спутника ГЛОНАСС была улучшена в несколько раз, в результате чего появилось три поколения спутников: оригинальный ГЛОНАСС (запущен в 1982 г.), ГЛОНАСС-М (запущен в 2003 г.) и ГЛОНАСС-К (запущен в 2011). В созвездии есть два типа космических аппаратов ГЛОНАСС: спутник ГЛОНАСС-М и спутник ГЛОНАСС-К.Краткое описание каждого типа заключается в следующем.
9.1. Первое поколение (ГЛОНАСС)
Первое поколение спутников ГЛОНАСС (Ураган) было запущено в 1982 году. Каждый спутник весил приблизительно 1250 кг и был оснащен базовой двигательной установкой, позволяющей ему перемещаться в пределах его орбиты [26]. Первоначально основная роль ГЛОНАСС заключалась в том, чтобы контролировать состав навигационного сигнала и получать данные эфемерид и альманахов со спутников. Это поколение больше не используется.
9.2. Второе поколение (ГЛОНАСС-М)
ГЛОНАСС-М, модернизированная версия прежнего созвездия, была запущена в 2003 году, имея более длительный проектный срок службы около 7 лет и гражданскую модуляцию в своем диапазоне частот L2. Эти изменения улучшили навигационные характеристики, обеспечили обновление навигационных радиосигналов и повысили стабильность этих сигналов [27].
9.3. Третье поколение (ГЛОНАСС-К)
Значительные улучшения произошли в 2011 году с запуском третьего поколения, ГЛОНАСС-К.Среди этих изменений — увеличение продолжительности жизни спутников до десяти и уменьшение их веса вдвое [22]. Точность также улучшилась: каждый спутник передает пять навигационных сигналов вместо двух. Эти новые спутники предназначались для передачи четырех военных сигналов на несущих L1 и L2 и одного гражданского сигнала на частоте L3. Спутники ГЛОНАСС-К транслируют другие сигналы; два из них совместимы с навигационными сигналами GPS / Galileo. Добавление сигналов CDMA улучшило совместимость и обеспечило совместимость с услугами, предоставляемыми другими GNSS, что проложило путь для производства приемников, пригодных для использования со всеми GNSS [23].Таблица 2 показывает, как система была модернизирована за эти годы.
| Спутниковая серия | Запуск | Текущее состояние | Ошибка часов (ы) | |||
|---|---|---|---|---|---|---|
| ГЛОНАСС | 1982 | 9020 | 9020 | 02093 9020 | 020 9020 | 020 020 9020 9020 903 020 9020 9020 2 090 903 020 909 020 909 020 903 0 909 0 903 0 902 909 0 909 0 903 0 909 0 903 902 902 909 090 903 902 909 909 020 903 902 092 902 909 909 020 909 020 909 0903 909 020 909 020 909 0903 909 020 909 020 909 020 909 020 909 0203 909 020 909 020 890 920|
| ГЛОНАСС-М | 2003 | В эксплуатации | 1 × 10 −13 | |||
| ГЛОНАСС-K1 | 2011 | В работе | 5 × 10 904 920 909 90882 9014 9 909 90882 902 9 909 902 088 0 -K2 | 2013 | Этап проектирования | 1 × 10 −14 |
Таблица 2.
Дорожная карта модернизации ГЛОНАСС.
10. Характеристики сигналов ГЛОНАСС
Документ управления интерфейсом ГЛОНАСС (ICD), находящийся в Российском институте космического приборостроения, содержит подробную информацию о структуре радиосигналов ГЛОНАСС [22]. В отличие от GPS, ГЛОНАСС использует множественный доступ с частотным разделением (FDMA) для модуляции сигнала. Этот метод использует один и тот же код псевдослучайного шума (PRN) для всех спутников для получения сигнала с расширенным спектром.GPS, с другой стороны, использует множественный доступ с кодовым разделением (CDMA) для идентификации каждого отдельного спутника. FDMA обеспечивает лучшее подавление помех для узкополосных сигналов помех по сравнению с CDMA. В CDMA один источник узкополосного источника помех может одновременно прерывать все спутниковые сигналы GPS, такие помехи влияют только на один сигнал FDMA GLONASS одновременно. Недостатком FDMA, однако, является то, что он требует больше спектра, чем системы CDMA. ГЛОНАСС использует L1 в диапазоне 1602.0–1615,5 МГц и L2 в диапазоне 1246,0–1256,5 МГц для передачи C / A-кода и P-кода.
10,1. ГЛОНАСС RF частотного плана
Номинальные значения несущих частот L1 и L2 выражены в виде [22]
FK1 = F01 + KΔf1E3
FK2 = F02 + KΔf2E4
где К число частотных каналов сигналов, передаваемых с помощью спутников ГЛОНАСС в L1 и L2 поддиапазонах:
F01 = 1602MHz; Δf1 = 562.5kHz, forsub-полоса L1
F02 = 1246MHz; Δf2 = 437.5kHz, forsub-диапазон L2
Каждый спутник имеет стандартную номинальную частоту, с значение 5.0 МГц, который генерирует несущие частоты L1 и L2. Система использует 12 каналов для переключения между своими 24 действующими спутниками. Антиподальные спутники в одной плоскости орбиты разделены аргументом широты 180 °, как показано на рисунке 7 [26].
Рис. 7.
Антиподальные спутники ГЛОНАСС[3].
10.2. Структура сигнала ГЛОНАСС
Спутники ГЛОНАСС также передают два кода PRN: код грубого обнаружения (C / A) и точный (P) код. Код C / A передается только на частоте L1, а код P передается на частотах L1 и L2.ГЛОНАСС использует двухфазную модуляцию для объединения сигнала несущей с суммированием по модулю 2 кода PRN со скоростью 511 кГц, навигационного сообщения со скоростью 50 бит / с и вспомогательной меандровой последовательностью 100 Гц [21].
Спутники ГЛОНАСС-К также транслируют новые сигналы CDMA в диапазоне L3 на несущей частоте 1202,025 МГц [23]. Частота чипирования для кода ранжирования составляет 10,23 Мбит / с, и она повторяется каждые 1 мс. Однако в новом сигнале используется метод квадратурной фазовой манипуляции (QPSK) с синфазным каналом, выделенным для данных, и квадратурным каналом для информации пилот-сигнала.Этот спектр сигнала изображен на рисунке 8.
Рисунок 8.
L3 CDMA-спектр сигнала [23].
10.3. Стандартный код диапазона точности (код C / A)
Код C / A представляет собой 511-битную двоичную последовательность, которая модулируется на несущей частоте с частотой дискретизации 0,511 МГц и, таким образом, повторяется каждую миллисекунду [3]. Он получен из седьмого бита девятибитного регистра сдвига. Код описывается неприводимым полиномом 1 + x 5 + x 7 .Начальное состояние определяется как каждый бит, содержащий значение «1» [22].
10.4. Высокоточный код ранжирования (P-код)
ГЛОНАСС-P-код представляет собой двоичную последовательность длиной 5,11 миллиона бит. Он модулируется на сигнал несущей с частотой 5,11 МГц и, следовательно, повторяется каждые 1 с [3].
10,5. Внутрисистемные помехи
Внутрисистемные помехи в ГЛОНАСС вызваны взаимными корреляционными свойствами кодов ранжирования и используемой методикой FDMA [22]. В действительности, помехи возникают внутри приемника между сигналами, передаваемыми по частотному каналу K = n, и сигналами, передаваемыми по соседним каналам K = n + 1 и K = n — 1.Другими словами, эта помеха возникает, когда спутники с соседними частотами видны одновременно.
10,6. Навигационное сообщение ГЛОНАСС
Навигационное сообщение содержит немедленные и не немедленные данные. Он транслируется со спутников ГЛОНАСС со скоростью 50 бит / с для предоставления пользователям необходимых данных для определения местоположения, времени и планирования наблюдений [22].
Непосредственные данные содержат информацию о спутниках ГЛОНАСС. Он передает навигационный сигнал, который в основном включает в себя перечисление времени спутника и разницу между шкалой времени спутника и временем ГЛОНАСС.Разница между несущей частотой спутникового сигнала и его номинальным значением также включена в эти данные наряду с эфемеридами и другими параметрами.
Непосредственные данные, с другой стороны, содержат информацию об альманахе системы. Данные альманаха предоставляют информацию о состоянии всех спутников в текущем созвездии, грубые поправки бортовой шкалы времени для каждого спутника относительно времени ГЛОНАСС. Данные альманаха также содержат информацию об орбитальных параметрах всех спутников (орбитальный альманах) и поправке к времени ГЛОНАСС относительно UTC (SU) и некоторых других параметров [22].
11. Сравнение GPS и ГЛОНАСС
В этом разделе дается краткое сравнение GPS и ГЛОНАСС. Важно понимать сходства и различия между GPS и ГЛОНАСС, в частности, при объединении их в одну навигационную службу или решение. Основные различия между обеими системами связаны со структурой созвездия, системой отсчета времени, системой координат и техникой модуляции или мультиплексирования сигнала. В следующих подразделах кратко описываются системы координат времени и координат GPS и ГЛОНАСС.
11.1. Системы отсчета времени
Как GPS, так и ГЛОНАСС имеют свои собственные системы времени; таким образом, не просто сделать преобразование времени из времени ГЛОНАСС во время GPS или наоборот. Наиболее важным фактором, который необходимо учитывать при обработке данных от комбинированных GPS и ГЛОНАСС, является разница между двумя временными шкалами.
11.2. Система времени ГЛОНАСС
Как видно из таблицы 2, дневная стабильность спутниковых часов для ГЛОНАСС, ГЛОНАСС-М и ГЛОНАСС-К лучше, чем 5 × 10 −13 , 1 × 10 −13 и 5 × 10 −14 соответственно.Сдвиг времени между временем ГЛОНАСС и национальным эталонным временем UTC (SU) составляет 3 ч. ICD (2008):
tGLONASS = tUTCSU + 03h00minsE5
Следующее выражение используется для выравнивания эфемерид спутника ГЛОНАСС в одном случае с измерениями, данными в UTC (SU):
tGLONASS = t + τc + τntb − γntbt − tbE6
, где
ttime передачи навигационного сигнала в бортовой шкале времени,
τ c по шкале времени ГЛОНАСС Время UTC (SU),
t b Индекс временного интервала в течение текущего дня,
τ n (t b ) поправка к n-му времени спутника относительно времени ГЛОНАСС в момент времени t b ,
γ n (t b ) относительное отклонение прогнозируемого значения несущей частоты n-спутника от номинального значения в момент времени t b .
Спутники ГЛОНАСС-М передают разницу между шкалой времени GPS и ГЛОНАСС (которая никогда не превышает 30 нс) [22].
11.3. Преобразование времени
ГЛОНАСС времени может быть преобразована в GPS времени, используя следующую формулу [27]:
ТГП = tGLONASS + тс + τu + τgE7
, где
тс = τUTCSU-tGLONASSE8
τu = tUTC-tUTCSUE9
τg = tGPS − tUTCE10
При комбинированной обработке данных GPS / ГЛОНАСС необходимо учитывать различия между этими временными шкалами.В противном случае вводятся систематические ошибки, которые влияют на решение комбинированного позиционирования.
В таблице 3 приведены основные параметры GPS и ГЛОНАСС, которые необходимо учитывать при комбинировании обработки данных GPS / ГЛОНАСС.
