куда поворачивать на поворотах и при заносе машины, на сколько градусов поворачивается
Умение удержать руль в разных ситуациях чрезвычайно важно для автолюбителя. При сдаче экзамена по вождению инструктор будет обращать внимание на то, как расположены руки на руле, как водитель перехватывает или выворачивает его. Подробнее о том, как держать рулевое колесо, и каким должно быть правильное руление, читайте в материале.
- Сколько градусов поворот руля автомобиля
- Как крутятся колёса при повороте руля
- Правила расположения рук на руле
- Способы вращения
- Без отрыва рук
- С перехватом
- Одной рукой
- Как крутить руль
- При повороте
- При сносе и заносе
- При развороте
- При движении задним ходом
- Видео: Движение задним ходом
- При парковке
- Экзамен на площадке
Сколько градусов поворот руля автомобиля
Отвечая на вопрос о том, на сколько градусов поворачивается руль машины, нужно помнить, что все транспортные средства разные. Для большинства авто это перемещение примерно на 3 оборота, между полной левой и полной правой блокировкой, т. е. около 180°. Автомобили спортивного типа, например, болиды «Формулы-1» оснащены максимально быстрыми рулевыми рейками с меньшим объёмом вращения от упора до упора. Они совершают полный оборот в 360°. Также некоторые другие могут осуществлять 2–2,4 оборота до блокировки слева или справа. Для больших автомобилей нужно 3–4 полных оборота руля, чтобы колёса поворачивались от замка к замку (от крайнего левого до крайнего правого).
Для большинства авто это перемещение примерно на 3 оборота, между полной левой и полной правой блокировкой, т. е. около 180°. Автомобили спортивного типа, например, болиды «Формулы-1» оснащены максимально быстрыми рулевыми рейками с меньшим объёмом вращения от упора до упора. Они совершают полный оборот в 360°. Также некоторые другие могут осуществлять 2–2,4 оборота до блокировки слева или справа. Для больших автомобилей нужно 3–4 полных оборота руля, чтобы колёса поворачивались от замка к замку (от крайнего левого до крайнего правого).
Как крутятся колёса при повороте руля
Чтобы автомобиль разворачивался правильно и плавно, каждое колесо должно вращаться по кругу. Поскольку внутреннее следует по кругу с меньшим радиусом, оно, на самом деле, делает более крутой поворот, чем внешнее. Если вы нарисуете линию, перпендикулярную каждому колесу, они будут пересекаться в центральной точке поворота. Геометрия рулевой тяги заставляет внутреннее колесо поворачиваться больше, чем внешнее.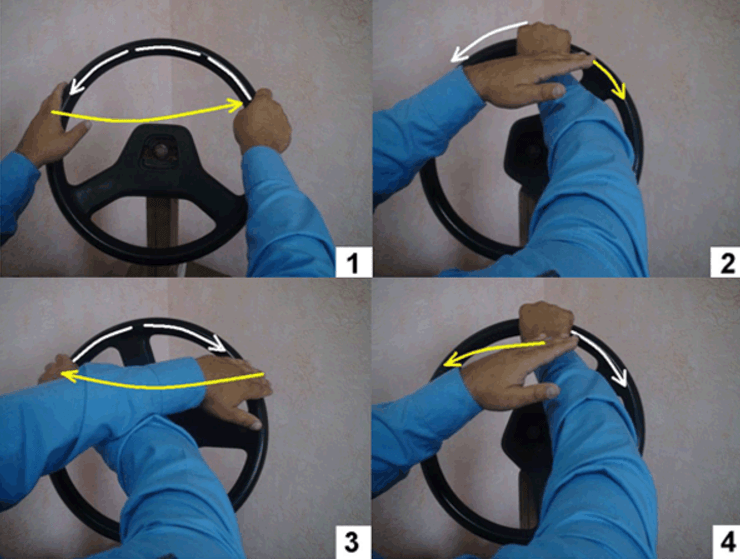
Рулевое управление может быть реечным и рециркуляционно-шариковым с гидравлическим приводом. Реечное используется на легковых автомобилях, небольших грузовиках и внедорожниках.
Это простая система, которая выполняет 2 функции:
- преобразует вращательное движение руля в линейное, необходимое для вращения колёс;
- обеспечивает снижение передачи и облегчает вращение.
Ещё один важный элемент — коэффициент рулевого управления
Лёгкие спортивные авто имеют более низкий коэффициент рулевого управления, чем крупные легковые и грузовые. И это обеспечивает ускоренное реагирование на ситуацию на дороге — не нужно сильно поворачивать руль, чтобы развернуть колёса.
И это обеспечивает ускоренное реагирование на ситуацию на дороге — не нужно сильно поворачивать руль, чтобы развернуть колёса.
Правила расположения рук на руле
Согласно статистике по авариям, основная причина того, что автомобиль съезжает с дороги — то, что начинающий и даже опытный водитель, не выкручивают в критической ситуации рулевое управление. Поэтому чрезвычайно важно понимать, как должны быть расположены руки, и уметь «чувствовать» автомобиль. Рекомендации для их расположения стали более гибкими в последние годы с учётом того, что изменились и усовершенствовались технологии, которые применены при изготовлении рулевого управления.
Опытные водители рекомендуют сбалансировать рулевое колесо так, чтобы избежать резких движений и минимизировать его развороты.
Начальное положение рук водителя:
- обе должны располагаться на наружном ободе рулевого колеса с противоположных сторон;
- держать руль нужно твёрдо, используйте пальцы и удерживайте их вдоль линии руля;
- никогда не вкладывайте пальцы или кисти внутрь обода.

Расслабьте руки. Не цепляйтесь за руль и не висите на нём. Необходимо уметь расслаблять кисти, иначе вы не сможете правильно рулить в сложной ситуации
Способы вращения
Существует три метода рулевого управления, которые можно использовать при повороте:
- без отрыва рук;
- перехват;
- одной рукой.
При правильном выполнении манёвра, управляемый автомобиль всегда будет двигаться плавно и непрерывно.
Без отрыва рук
При движении по прямой начальное положение рук не изменяется. Если понадобилось сделать поворот на 45°, то этот простой манёвр выполняют обычным поворотом руля в нужном направлении. Закончив его, руки возвращаются в исходную позицию.
Самый распространённый способ называется двухтактным управлением:
- При использовании этого метода левая рука захватывает колесо между 7 и 8 часами. Правая находится между 4 и 5 часами.
- В зависимости от направления, в котором происходит поворот, правая или левая рука толкает руль вверх. Затем противоположная скользит вверх, хватает колесо и тянет вниз, чтобы повернуть.
- Теперь вытягивающая рука опускается. И та, которая первоначально подталкивалась вверх, скользит назад в исходное положение.
- Чтобы вернуть машину обратно, просто переверните описанный процесс.
Руки водителя должны находиться в следующих секторах: между 11 и 8 часами слева и 1 и 8 часами справа, независимо от направления поворота.
Двухтактное управление считается наиболее безопасным. Руки не пересекают рулевое колесо, меньше шансов на то, что вы травмируете лицо или кисти при лобовом столкновении из-за подушки безопасности.
Важно! Ставить руки на 2 и 10 часов в автомобиле с рулевым колесом меньшего размера, чем стандартное и оборудованным воздушными подушками, может быть опасно.
С перехватом
Управление с перехватом используется на низких скоростях с ограниченной видимостью на перекрёстке или парковке, а также при восстановлении после заноса. Также эта методика может понадобиться на крутом повороте.
Также эта методика может понадобиться на крутом повороте.
Смысл перехвата заключается в том, что вы перехватываете руль до тех пор, пока он не будет повёрнут до попадания колёс в нужную позицию. А когда поворот закончен, машину нужно выровнять по прямой.
Техника выполнения:
- Левая рука захватывает руль между 8 и 9 часами, а правая — между 3 и 4.
- В зависимости от направления поворота используйте правую верхнюю треть рулевого колеса, чтобы больше повернуть руль вправо. Задействуйте левую верхнюю треть рулевого колеса, чтобы переместить его влево.
- Когда рука дойдёт до конца своей длины, происходит перехват колеса другой рукой, и вы продолжаете крутить руль.
- Правая или левая кисть сжимает руль и перемещает вверх. Противоположная позволяет ей двигаться, затем перехватывает руль и продолжает тянуть вверх.
- Когда он поднимется, рука, которая инициировала начало движения, отпускает его и возвращается в исходное положение.
Одной рукой
Управление одной рукой используется при движении задним ходом. Также в этот момент водитель может одной рукой управлять машиной, а второй переключать передачи. При этом тело должно быть расслаблено. Не висните на руле.
Также в этот момент водитель может одной рукой управлять машиной, а второй переключать передачи. При этом тело должно быть расслаблено. Не висните на руле.
Чтобы понять, что и как будет происходить, стоит немного потренироваться в пустынной местности. Вам нужно почувствовать движения машины и приноровиться к ним. Начинать упражнение желательно с небольших скоростей, и когда навык будет отработан, можно их увеличить.
Особенности выполнения:
- Одна рука осуществляет контроль машины. Её рабочее положение 8–9 часов или 3–4, в зависимости от формы руля. Это сохраняет стабильность, уменьшает разворот рулевого управления.
- Рука в точке 12 часов должна находиться, если происходит поворот влево или вправо. В этой ситуации кисть всё время будет в начальной позиции. Когда движение рулевого колеса дойдёт в нужную для поворота точку, водитель выпрямляет пальцы, одновременно удерживая руль и поворачивая кисть.
Как крутить руль
Существуют разные способы поворота руля. Новичку будет комфортно расположить руки в положении 10 и 2, т. е. если бы на руле были часы, левая рука держала бы его в позиции 10 часов, а правая — в позиции 2 часа. Некоторые модели руля имеют выступ в этой области, которая будет соответствовать начальному положению рук. Позже вы сможете найти свою удобную позицию, но начинайте с этой. И так как далее вы будете двигаться, то нужно изучить способы, которыми можно выполнять тот или другой манёвр.
Новичку будет комфортно расположить руки в положении 10 и 2, т. е. если бы на руле были часы, левая рука держала бы его в позиции 10 часов, а правая — в позиции 2 часа. Некоторые модели руля имеют выступ в этой области, которая будет соответствовать начальному положению рук. Позже вы сможете найти свою удобную позицию, но начинайте с этой. И так как далее вы будете двигаться, то нужно изучить способы, которыми можно выполнять тот или другой манёвр.
Важно! Держите руль крепко, но не туго. Немного расслабляйте руку, когда поворачиваете. Движения не должны быть скованы.
При повороте
Основной манёвр в движении машины — поворот. Шаги, которые понадобится осуществить:
- Положите руки в начальное положение (10 и 2).
- Поворачивайте рулевое колесо по часовой стрелке, пока левая рука не достигнет положения около 2 часов.
- Теперь отпустите правую и переместите её на 12 часов. При необходимости продолжайте вращать колесо, удерживая ладонью ручку по направлению к центру колеса.
- После поворота отпустите рукоятку и снова удерживайте его в исходном положении (10 и 2). Руль повернёт назад, и вы сможете его схватить.
При сносе и заносе
Умение реагировать в чрезвычайной ситуации — одно из наиболее важных для сохранения здоровья всех участников дорожного движения. Неправильное движение может иметь фатальные последствия. Что касается заноса, то его основная причина — отсутствие тяги. Если шины не могут соединиться с дорогой из-за льда или воды, это создает идеальные условия для него.
Важно! У большинства машин имеется система контроля тяги. Она поможет сократить время заноса.
Особенности выполнения движения:
- Сосредоточьтесь и не паникуйте. Если вы будете дёргать руль, жать на газ, то это может привести к потере контроля над машиной и столкновению с другими объектами.
- Крепко держите руль. Отпустите ногу с газа и не трогайте педали, пока скольжение не закончится.

- Начинайте поворачивать руль осторожно. Если бы вы ехали на коньках, то для поворота нужно замедлиться. То же происходит и с машиной. Когда вы начинаете поворачивать руль, сбивается траектория заноса и вы замедляетесь.
- Если заносит заднюю часть, руль вращают в направлении заноса. Когда он закончен, авто выравнивают, чтобы двигаться по прямой.
При развороте
Если поворот большой, то выполняется он перехватом рук. Руль надо крутить столько, пока колёса не попадут в нужную траекторию. Затем машину выравнивают для движения по прямой.
Инструкции:
- Из позиции для левой руки 8–9 ч., а правой 3–4 ч. вы начинаете крутить руль в ту сторону, куда нужно повернуть.
- Как только ведущая рука доходит до самой высокой для себя точки, происходит перехват колеса другой рукой, и ею тянут руль вниз.
- И затем снова происходит перехват с повтором движений №№ 1 и 2.
При движении задним ходом
Движение задним ходом будет выполняться по технике управления «одной рукой».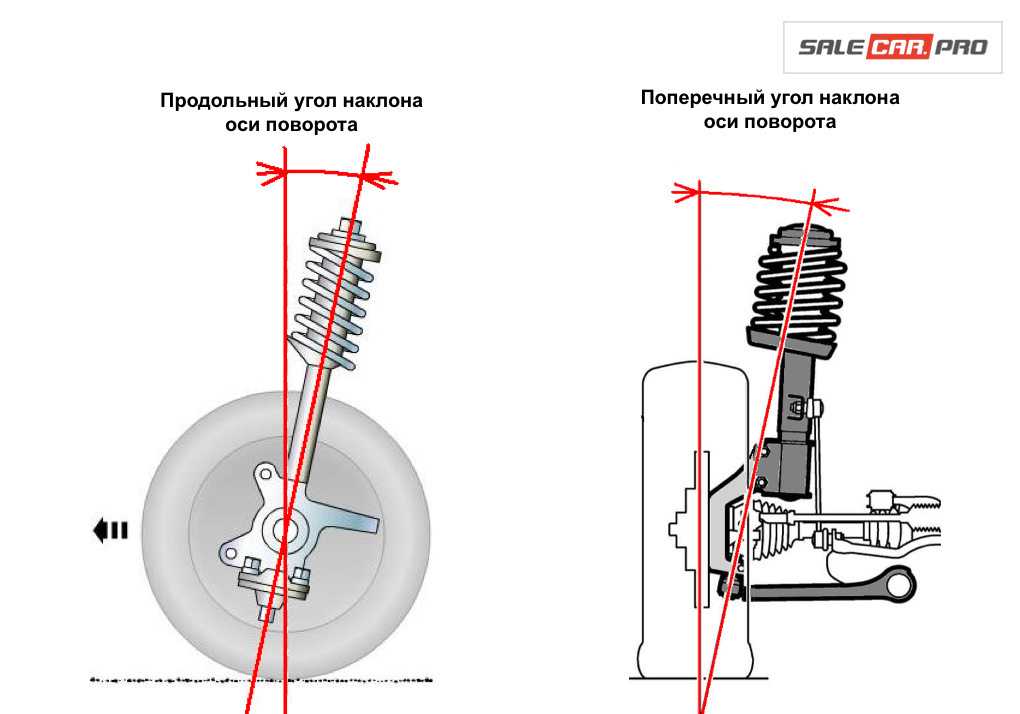 Водитель второй рукой держится за спинку пассажирского сиденья и рассматривает обстановку по зеркалам, или оглядываясь назад. Рабочее положение руки — сектор 8–9 ч. Руль удерживают кистью и одновременно контролируют.
Водитель второй рукой держится за спинку пассажирского сиденья и рассматривает обстановку по зеркалам, или оглядываясь назад. Рабочее положение руки — сектор 8–9 ч. Руль удерживают кистью и одновременно контролируют.
Техника выполнения манёвра:
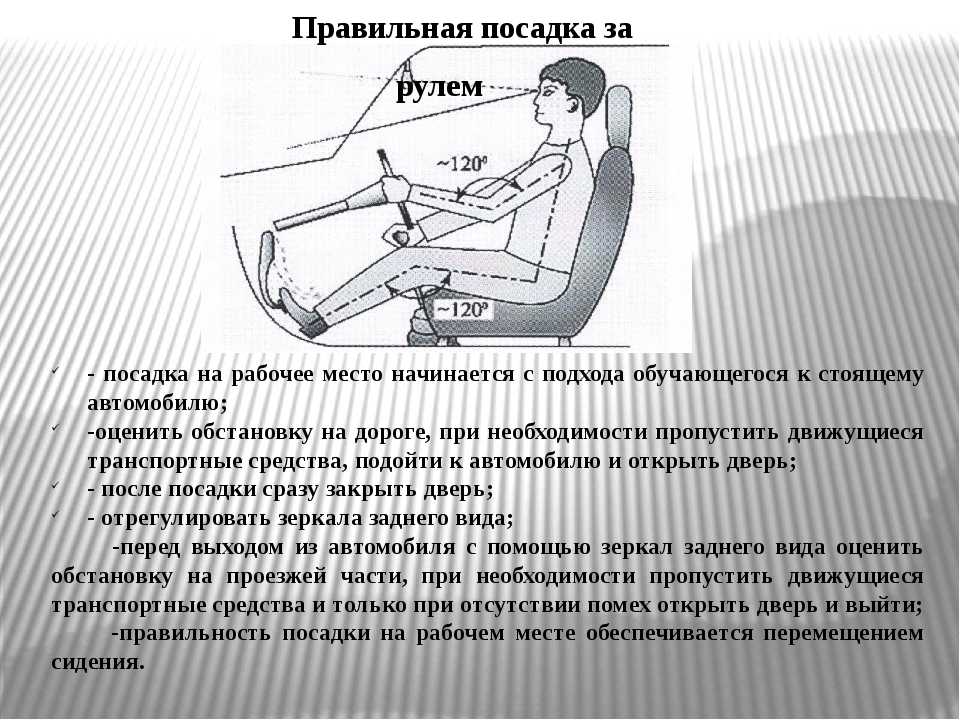
- До начала движения требуется отрегулировано сиденье. Водителю должно быть удобно нажимать педали, находясь в полуповороте. Если нужно ехать в таком положении долго, то сиденье должно находиться ближе к рулю.
- Отрегулируйте зеркала, они должны давать хороший угол обзора.
- Не забудьте пристегнуть ремень безопасности.
- Включите задний ход.
- Отпустите тормоз.
- Убедитесь, что вам никто не мешает (отсутствуют пешеходы и другие автомобили).
- Повернитесь налево и посмотрите через левое плечо.
- Посмотрите через правое.
- Используйте для управления только левую руку, пока будете двигаться задним ходом.
- Как только достигли желаемой позиции, остановите автомобиль.

Видео: Движение задним ходом
При парковке
Есть 3 типа парковки:
- угловая;
- перпендикулярная;
- параллельная.
Чаще водитель сталкивается с параллельной парковкой. И он должен уметь выполнить её безупречно, особенно в зоне с интенсивным движением.
Выполнение манёвра будет состоять из следующих шагов:
- Найдите место для парковки.
- Проанализируйте положение вашего автомобиля. Нужно сохранить дистанцию в 1,5–2 м от других. Понадобится выровнять вашу машину параллельно другому автомобилю, который уже припаркован.
- Если рядом с парковочным местом других авто нет, сохраните дистанцию от крайней точки парковки.
- Включите световой сигнал.
- Начните двигаться к конечной точке, поворачивая руль и устанавливая авто параллельно к уже стоящим на парковке.
- Ведите машину, пока не установите её на позицию.
Экзамен на площадке
Отправляясь на экзамен, на автодром, нужно учитывать, что в поездке вам должно быть комфортно. Потребуются удобная обувь и одежда, не стесняющая движение. Часто перед экзаменом люди волнуются и принимают успокоительные препараты. Учитывайте, что некоторые из них влияют на скорость реакции, поэтому обязательно читайте инструкцию до того как принять препарат. Особенно это касается побочных эффектов. А лучше не злоупотребляйте лекарствами.
Потребуются удобная обувь и одежда, не стесняющая движение. Часто перед экзаменом люди волнуются и принимают успокоительные препараты. Учитывайте, что некоторые из них влияют на скорость реакции, поэтому обязательно читайте инструкцию до того как принять препарат. Особенно это касается побочных эффектов. А лучше не злоупотребляйте лекарствами.
Если приехать на площадку до начала экзамена, у вас будет время успокоиться. И, возможно, вам даже разрешат проехать один тренировочный круг по полосе, где будет проходить экзамен.
Во время управления автомобилем учитывайте следующее:
- Следует помнить о таблице штрафных баллов, но также обращайте внимание на всё, что вы будете делать в комплексе.
- Не нужно зацикливаться на ошибке. Возможно, она будет признана несущественной. Требуется сосредоточиться на управлении автомобилем и продолжать выполнять команды инструктора.
Для правильного осуществления манёвров нужно запомнить не только постановку рук, но и уметь чувствовать автомобиль. Научиться этому можно, только тренируясь, и тогда у вас всё будет получаться автоматически.
Научиться этому можно, только тренируясь, и тогда у вас всё будет получаться автоматически.
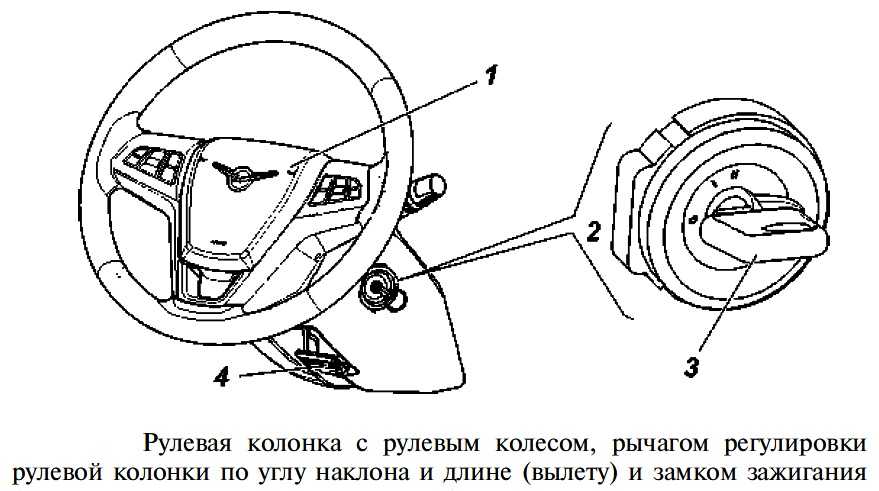
БГАК — Учебные материалы — Д.В.Фокин — Современные автомобильные технологии — Теория — Рулевое управление
Рулевое управление с двумя управляемыми осями
Устойчивость
и управляемость автомобиля при поворотах во многом зависит от направления следования
задней оси по колее передней, которое необходимо для уменьшения угла поворота автомобиля
и износа его шин. Применение управляемой задней оси позволяет уменьшать поперечные
ускорения при повороте автомобиля, что повышает его устойчивость. Системы управления
всеми четырьмя колесами значительно улучшают маневрирование автомобиля. Во-первых,
повышается чувствительность автомобиля к повороту рулевого колеса. Ведь при тихой
езде по городским улочкам лучше иметь «острое» рулевое управление, чтобы не вращать
рулевое колесо на несколько оборотов при каждом маневре. На автостраде же
«острое» рулевое управление может вызвать проблемы — автомобиль будет слишком резко
реагировать даже на небольшие подруливания.
Рулевое управление всеми колесами может работать в одном из двух режимов: с поворотом колес передней и задней осей в разные стороны или в одну и ту же сторону.
При малых скоростях, примерно до 40 км/ч, задние колёса автоматически поворачиваются в противоположную сторону относительно передних колёс (рис.5.1.44, а). Преимущества рулевого управления всеми колёсами особенно заметны при маневрировании. Диаметр разворота уменьшается примерно на один метр: с 12 до 11 м. За счёт этого улучшаются манёвренные качества автомобиля.
Если
скорость становится выше 40 км/ч, то задние колёса при повороте рулевого колеса
автоматически поворачиваются в ту же сторону, что и передние (рис.5.1.44, б).
За счёт этого улучшается устойчивость, а, следовательно, и безопасность
движения.
Рисунок 5.1.44 – Режимы работы рулевого управления
1. Поворот передних и задних колес в разные стороны (рис.5.1.45)
Рисунок 5.1.45 – Схема движения автомобиля на повороте
Главное преимущество поворота передних и задних колёс в разные стороны заключается в улучшении манёвренности автомобиля при малых скоростях, а также в уменьшении коридора движения автомобиля. Для водителя это выражается в том, что он может поворачивать рулевое колесо на меньший угол при том же радиусе поворота и той же скорости. Автомобиль в движении воспринимается как намного более манёвренный и отзывчивый. Для полного использования преимуществ поворота колёс в разные стороны эта функция активируется только в нижнем диапазоне скоростей (до прим. 40 км/ч).
На
рисунке 5.1.45 преимущество управляемой задней подвески показано на примере
разворота с минимальным радиусом. Хорошо видно, что радиус разворота R2,
достигаемый при использовании управляемой задней подвески, заметно меньше, чем
в обычном случае (R1).
2. Поворот колес в одну сторону
2.1. Изменение направления движения автомобиля с управляемыми передними колесами
Водитель инициирует поворот автомобиля — для изменения направления его движения — вращением рулевого колеса, поворачивая тем самым передние колёса автомобиля (рис.5.1.46, а). Вследствие деформации пятна контакта шин (возникающей из-за поворота колёс), передние колёса начинают передавать на кузов боковые усилия.
Чтобы автомобиль мог начать поворачиваться относительно вертикальной оси, на колёсах задней оси должно возникнуть соответствующее противонаправленное боковое усилие реакции.
Вслед за этим боковое усилие изменит своё направление под воздействием стремящейся к наружной стороне поворота массы автомобиля, и только после этого может начать создаваться поперечное ускорение (рис.5.1.46, б).
Рисунок 5.1.46 – Поворот автомобиля с управляемыми передними колесами
Изменение
направления движения автомобиля поворотом только передних колёс приводит к
возникновению довольно большого момента рыскания (вращательного движения
относительно вертикальной оси) до тех пор, пока автомобиль не перейдёт снова в
стационарное состояние движения. Следствием этого может быть снижение уровня
комфорта вплоть до возникновения нестабильных состояний. Например, резкий
поворот водителем рулевого колеса для объезда неожиданно появившегося
препятствия может привести к возникновению вращательных колебаний относительно
вертикальной оси, которые могут негативно влиять на курсовую устойчивость
автомобиля.
Следствием этого может быть снижение уровня
комфорта вплоть до возникновения нестабильных состояний. Например, резкий
поворот водителем рулевого колеса для объезда неожиданно появившегося
препятствия может привести к возникновению вращательных колебаний относительно
вертикальной оси, которые могут негативно влиять на курсовую устойчивость
автомобиля.
2.2. Изменение направления движения автомобиля с управляемой задней осью
Водитель
инициирует поворот автомобиля — для изменения направления его движения —
вращением рулевого колеса, поворачивая тем самым передние колёса автомобиля
(рис.5.1.47, а). Система реагирует на действия водителя, одновременно
поворачивая задние колёса в том же направлении. Вследствие деформации пятна
контакта шин всех четырёх колёс, параллельно боковым усилиям со стороны
передних колёс на кузов будут передаваться действующие в том же направлении
боковые усилия со стороны задних колёс. В результате возникающий момент
рыскания, то есть момент поворота относительно вертикальной оси, оказывается
существенно меньше, чем на автомобиле с управляемыми передними колёсами.
Рисунок 5.1.47 – Поворот автомобиля с управляемой задней осью
Стационарное состояние достигнуто, автомобиль движется по заданной водителем окружности (рис.5.1.47,б).
В то время как поворот задних колёс в противоположном направлении используется при небольших скоростях движения, поворот задних колёс в том же направлении, что и передних, выполняется при более высоких скоростях.
 В таких ситуациях задние колёса
поворачиваются в том же направлении, что и передние, в большей степени, чем
обычно, для повышения курсовой устойчивости автомобиля.
В таких ситуациях задние колёса
поворачиваются в том же направлении, что и передние, в большей степени, чем
обычно, для повышения курсовой устойчивости автомобиля.Преимущества рулевого управления всеми колесами при неожиданных маневрах объезда препятствий изображены на рисунке 5.1.48.
Если при скоростях выше 40 км/ч на дороге неожиданно обнаруживаются препятствия и водителю приходится уклоняться, то возникают опасные дорожные ситуации. В автомобилях без рулевого управления всеми колёсами задние колёса не могут следовать за углом поворота передних колёс (рис.5.1.48, а).
Рисунок 5.1.48 (а) – Схема движения автомобиля при резкой смене полосы движения: маневр объезда/ смена полосы движения автомобиля с обычным рулевым управлением
В автомобилях с рулевым управлением всеми колёсами задние колёса поворачиваются однонаправленно с передними колёсами. Манёвр объезда происходит более плавно, опасные дорожные ситуации предотвращаются (рис.5.1.48, б).
Рисунок 5. 1.48 (б) – Схема движения автомобиля при резкой смене
полосы движения: маневр объезда/ смена полосы движения автомобиля с рулевым
управлением всеми колесами
1.48 (б) – Схема движения автомобиля при резкой смене
полосы движения: маневр объезда/ смена полосы движения автомобиля с рулевым
управлением всеми колесами
Поворот колёс задней оси (изменение угла их схождения) осуществляется активным исполнительным механизмом. Направляющие тяги крепятся к корпусам колёсных подшипников через резинометаллические сайлент‑блоки, как и на обычной задней подвеске. Но, в отличие от обычной задней подвески, направляющие тяги другими своими концами крепятся (также через резинометаллические сайлент-блоки) с обеих сторон не к подрамнику, а к исполнительному механизму.
Весь
узел, состоящий из исполнительного механизма, привода и электронного блока
управления, установлен на подрамнике и синхронно поворачивает оба колеса на
один и тот же угол. Поскольку угол поворота не превышает прим. 5°, специальные
поворотные кулаки, как в подвеске передних колёс, не требуются. Изменение углов
поворота колёс обеспечивается за счёт эластичности сайлент-блоков в соединениях
рычагов подвески с подрамником.
Рулевое управление всеми колесами состоит из следующих компонентов (рис.5.1.49):
— блок управления управляемой задней оси J1019;
— электродвигатель;
— привод с винтовой передачей.
Рисунок 5.1.49 – Исполнительный механизм поворота колес задней оси
Электродвигатель приводит во вращение гайку ходового винта через ремённую передачу. Вращение гайки преобразуется в прямолинейное движение ходового винта. Закреплённые на нём направляющие тяги передают это движение на корпуса ступичных подшипников, приводя к одновременному повороту колёс в одну и ту же сторону: вправо или влево (в зависимости от направления вращения электродвигателя). Благодаря шагу и трапециевидному типу резьбы гайки/ходового винта, механизм является самостопорящимся.
Напряжение
на электродвигатель подаётся только непосредственно во время поворота колёс, в
остальное время электродвигатель не приводится в действие. Удерживающие усилия
возникают исключительно за счёт самостопорящихся свойств винтовой передачи.
Максимальный ход винта (из среднего положения) составляет прим. 9 мм, что соответствует максимальному углу поворота колёс прим. 5°.
Датчик нулевого положения рулевого механизма (рис.5.1.50) регистрирует нулевое, «среднее» положение ходового винта, то есть такое, при котором поворот колёс отсутствует. Датчик работает на основе эффекта Холла. Для этого на ходовом винте имеется штырь с закреплённым на нём постоянным магнитом. Распознавание положения ходового винта происходит в узком угловом диапазоне в области нулевого положения. Перед собственно датчиком Холла на плате датчиков расположены также ещё два выключателя Холла. Эти выключатели служат для определения направления движения ходового винта.
Рисунок 5.1.50 – Датчик нулевого положения рулевого механизма
Для
привода механизма используется трёхфазный бесщёточный синхронный
электродвигатель (рис.5.1.51). Трёхфазный ток для него создаётся в
преобразователе AC/DC в силовом выходном каскаде блока управления.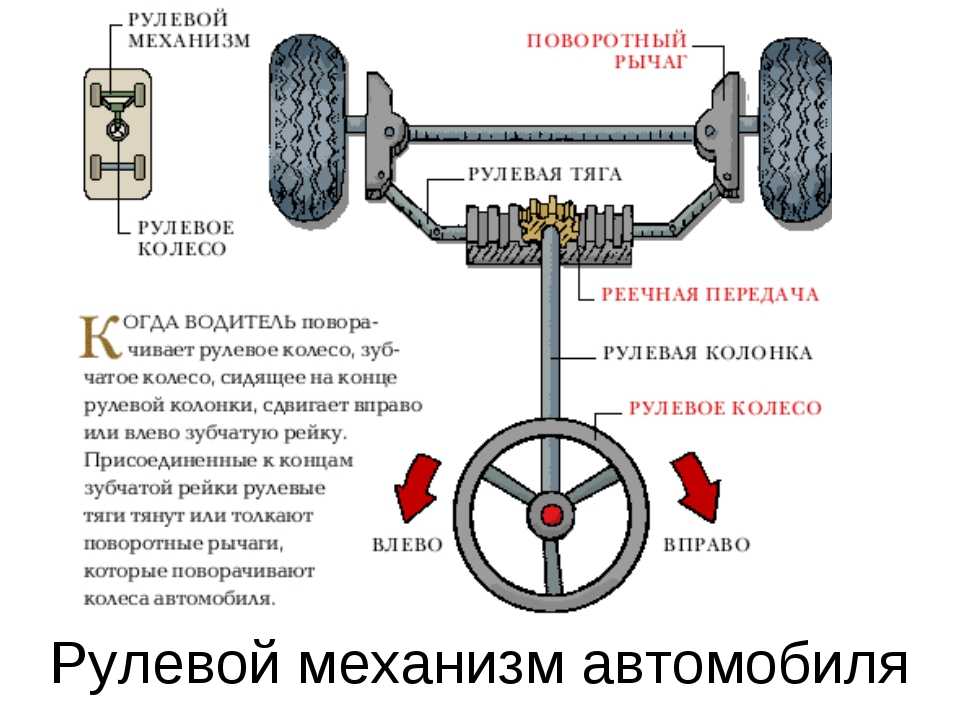 В
электродвигателе имеется датчик положения ротора. Этот датчик регистрирует
положение ротора с очень высокой точностью.
В
электродвигателе имеется датчик положения ротора. Этот датчик регистрирует
положение ротора с очень высокой точностью.
Рисунок 5.1.51 – Электродвигатель
Блок управления и выходной каскад представляют собой единый компактный узел, защищённый от брызг и влаги и привинчиваемый к электродвигателю. Блок управления подключён к шине FlexRay как низкоомное оконечное устройство. На основе поступающих в него определённых команд он рассчитывает необходимые значения тока для активации электродвигателя. Преобразователь AC/DC обеспечивает соответствующие значения напряжения, подаваемого на электродвигатель.
Для выполнения своих функций системе управления задней осью всегда требуются следующие измеряемые величины/данные:
• Угловые скорости вращения колёс
Значения
угловых скоростей вращения колёс в виде сообщений отправляются блоком
управления ABS J104 на шину FlexRay. Блок управления управляемой задней
подвески J1019 рассчитывает на их основе эталонную скорость автомобиля, которая
в порядке резервирования сравнивается с эталонной скоростью автомобиля,
определённой системой ESP.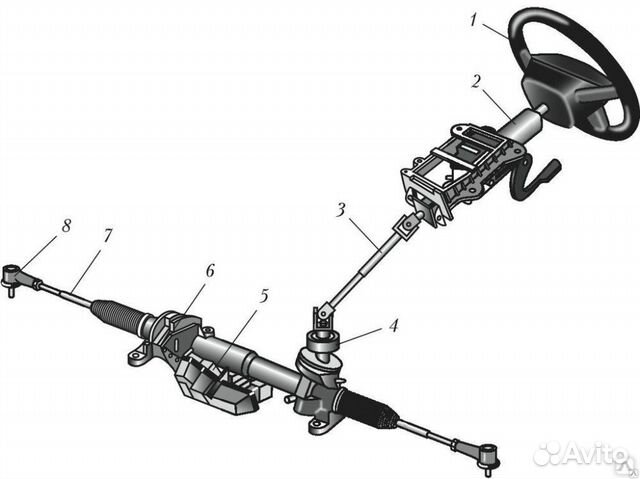
• Угол поворота рулевого колеса
Этот угол поворота регистрируется датчиком угла поворота рулевого колеса G85 и также передаётся в виде сообщения по шине FlexRay.
На основе двух главных параметров: скорости автомобиля и угла поворота колёс передней оси — блок управления рассчитывает требуемый угол поворота колёс задней оси.
При кодировке блока управления в нём сохраняются характеристики, задающие угол поворота задних колёс в зависимости от скорости автомобиля и угла поворота передних колёс (угла поворота рулевого колеса). Разные характеристики соответствуют разному характеру работы рулевого управления/динамическому поведению автомобиля (желание водителя). Характеристики активируются в зависимости от выбранной водителем настройки drive select и обеспечивают различные варианты поведения рулевого управления: от ориентированного на комфорт до спортивного.
Если
поворот водителем рулевого колеса происходит на невысоких скоростях (до прим.
40 км/ч), задние колёса отклоняются в противоположную передним сторону на угол
около 5°.
При этом угол поворота задних колёс тем больше, чем больше угол поворота передних колёс (поворота рулевого колеса водителем), учитывается также скорость движения автомобиля.
При более высоких скоростях (начиная прим. с 50 км/ч) задние колёса поворачиваются в ту же сторону, что и передние, но на заметно меньший угол.
При неподвижном автомобиле задние колёса всегда находятся в нейтральном положении (исходное положение). Точное положение определяется исходя из анализа измеряемых величин датчика нулевого положения и датчика положения ротора.
В
исключительных случаях полный возврат задних колёс в нейтральное положение
может оказаться невозможным вследствие недостаточности возвратного усилия.
Такое может происходить в основном из-за загрузки автомобиля (большой вес,
приходящийся на ось), а также из-за свойств дорожного покрытия (высокий
коэффициент трения). В этом случае возврат колёс в точное нейтральное положение
происходит, только когда автомобиль снова начинает движение.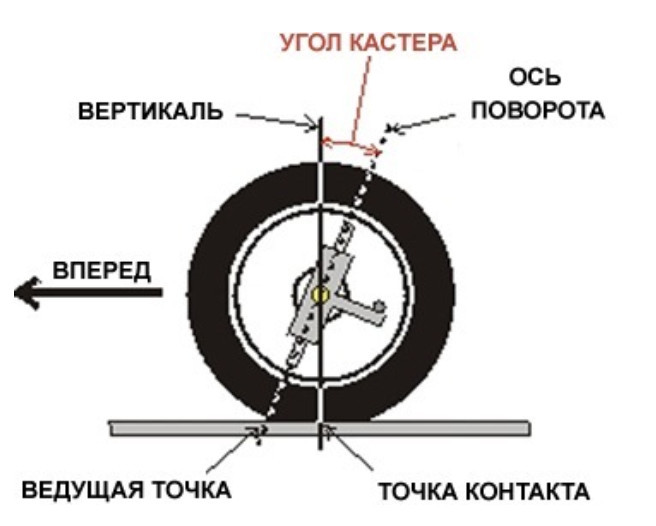 Система
соответствующей индикацией предупреждает водителя, что колёса не находятся в
нейтральном положении.
Система
соответствующей индикацией предупреждает водителя, что колёса не находятся в
нейтральном положении.
Парковочный автопилот и ассистент маневрирования с прицепом могут «запрашивать» определённый угол поворота колёс задней оси. При этом названные блоки управления передают точные значения угла поворота колёс, которые затем обеспечиваются блоком управления управляемой задней оси J1019.
Система ESP также может оказывать определённое влияние на функционирование управляемой задней оси. В тех случаях, когда это требуется для поддержания курсовой устойчивости автомобиля, ESP может блокировать поворот задних колёс.
физика — типичный Максимальный угол поворота руля реального автомобиля
спросил
Изменено 3 года, 10 месяцев назад
Просмотрено 58 тысяч раз
\$\начало группы\$
Я создаю автомобильный симулятор в Unity3D. Я пытаюсь сделать свойства автомобиля максимально реалистичными. Я не могу получить прямой ответ в Google, поэтому я решил спросить здесь.
Я пытаюсь сделать свойства автомобиля максимально реалистичными. Я не могу получить прямой ответ в Google, поэтому я решил спросить здесь.
Каков типичный максимальный угол поворота руля обычного легкового автомобиля?
- физика
- единство
- моделирование
- автомобиль
\$\конечная группа\$
0
\$\начало группы\$
Вы можете рассчитать это на основе свойств автомобиля. Используя геометрию рулевого управления Аккермана, вы можете рассчитать центр поворотной окружности. Это будет учитывать длину и ширину автомобиля и точно моделировать максимальный радиус поворота, который вы можете взять.
Причина, по которой вы не можете найти точный ответ, заключается в том, что он зависит от марки автомобиля. Максимальный угол поворота передних колес зависит от доступного места в колесной нише и используемого оборудования.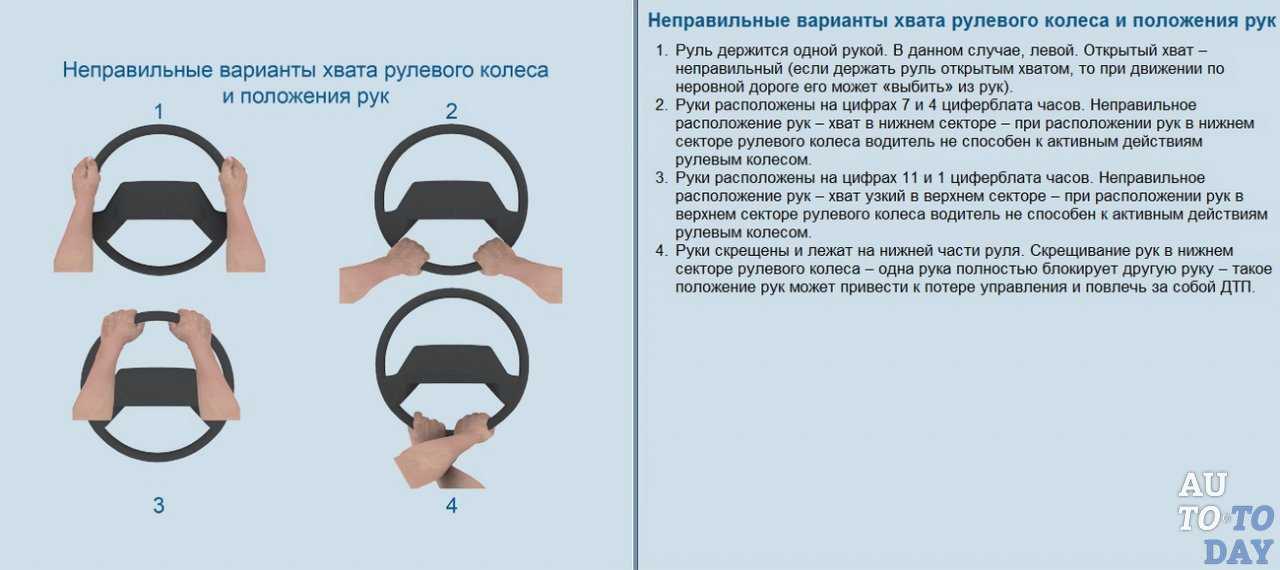 Вы можете предположить некоторые максимумы, основанные на обычно используемом оборудовании. Я бы сказал, что колеса не будут поворачиваться более чем на 65 градусов в любом направлении. Это довольно высокая верхняя граница. Однако это то, что вы можете смоделировать, используя созданную вами модель вашего автомобиля. Как далеко вы можете повернуть колеса, прежде чем они коснутся колесной ниши?
Вы можете предположить некоторые максимумы, основанные на обычно используемом оборудовании. Я бы сказал, что колеса не будут поворачиваться более чем на 65 градусов в любом направлении. Это довольно высокая верхняя граница. Однако это то, что вы можете смоделировать, используя созданную вами модель вашего автомобиля. Как далеко вы можете повернуть колеса, прежде чем они коснутся колесной ниши?
\$\конечная группа\$
3
\$\начало группы\$
Производители автомобилей обычно указывают радиус поворота, а также колесную базу автомобиля. Оттуда, следуя приведенной выше диаграмме с помощью простых математических вычислений, вы можете вычислить приблизительный угол поворота внутреннего колеса.
atan(колесная база/(диаметр разворота - ширина автомобиля)) = угол
Для внешнего колеса не вычитайте ширину.
Случайный выбор автомобиля, см. стр. 62 — колесная база 2468 мм и радиус поворота 10,7 м (радиус 5350 мм),
стр. 62 — колесная база 2468 мм и радиус поворота 10,7 м (радиус 5350 мм), атан(2468/(5350-1546)) составляет около 33 градусов.
Более экстремальный пример из этого такси дает 53 градуса.
\$\конечная группа\$
\$\начало группы\$
Максимальный угол поворота колес при повороте зависит от скорости автомобиля и его изготовления.
Точнее, на более высокой скорости передаточное отношение меньше по сравнению с более низкой скоростью, когда передаточное отношение становится больше.
\$\конечная группа\$
1
Определения
Система рулевого управления
Определения
Диаметр окружности дорожки D с
Можно рассчитать с помощью
угол δ A,o (как показано на рисунке), т.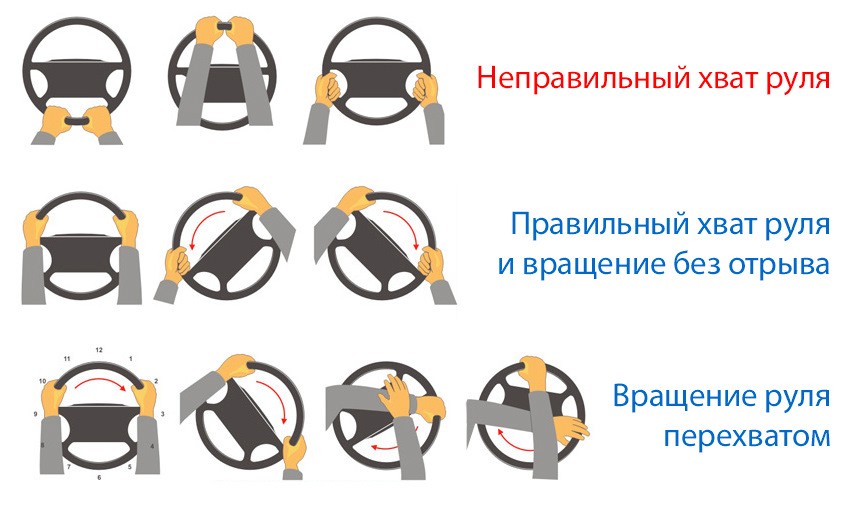 е. диаметр
окружность, которую внешнее переднее колесо описывает с наибольшим углом поворота рулевого колеса.
Круг колеи транспортного средства должен быть как можно меньше, чтобы его было легко перемещать.
повернуть и припарковаться.
е. диаметр
окружность, которую внешнее переднее колесо описывает с наибольшим углом поворота рулевого колеса.
Круг колеи транспортного средства должен быть как можно меньше, чтобы его было легко перемещать.
повернуть и припарковаться.
Формула, полученная с использованием
Иллюстрация показывает, что это требование требует короткой колесной базы и
большой угол поворота δ A,o на внешнем колесе изгиба. Это в свою очередь требует
еще больший внутренний угол колеса, который ограничен тем, что полностью
вращающееся прижимное колесо не должно соприкасаться с рулевой рубкой или
компоненты переднего моста. Рулевая рубка не может быть отведена слишком далеко в сторону
передней ноги, так как педали тогда были бы под углом к направлению
в котором лица водителя и пространство для ног будут ограничены. В переднем колесе
вождения транспортных средств, также необходимо предусмотреть место для цепей противоскольжения и самых больших
рабочий угол приводных шарниров.
Рис. Кинематика соотношения по Аккерману между углом поворота руля δ A,o на колесе с внешней стороны изгиба и δ и с внутренней стороны изгиба. На иллюстрации также показаны D δ A и диаметр окружности гусеницы D s |
Бордюрный круг для бордюр (бордюр к бордюру) D tc, cb
Радиус окружности пути составляет
в основном только теоретическое значение, которое можно рассчитать на этапе проектирования;
для водителя важен радиус поворота от бордюра до бордюра, в
другими словами, расстояние между двумя бордюрами нормальной высоты (см. рисунок)
стоящие параллельно друг другу, между которыми водитель может просто повернуть
транспортное средство. Диаметр этой окружности D tc, cb могут быть измерены, но также могут
можно легко рассчитать, используя диаметр окружности трека D s и
фактическая ширина шины B.
D tc, cb = D s + B [м]
Рис. Бордюр круга поворота для бордюра D tc, cb важный размер для водителя при повороте автомобиль. |
Диаметр поворота
Однако диаметр поворота, диаметр которого D больше диаметра окружности гусеницы спереди длина свеса L, вероятно, является более важным параметром. это диаметр наименьшая цилиндрическая оболочка, в которой транспортное средство может совершить круг с наибольший угол входа руля (как видно на рисунке). Наименьший радиус поворота можно рассчитать на этапе проектирования, но проще измерить и отображается как информация производителя в спецификациях или как значение измерения в отчетах об испытаниях.
Рис. |
 Круг поворотный D tc это дуга, описываемая частями автомобиля, наиболее выступающими наружу
когда колеса развернуты на наибольший угол поворота руля.
Круг поворотный D tc это дуга, описываемая частями автомобиля, наиболее выступающими наружу
когда колеса развернуты на наибольший угол поворота руля.
Пример
Марка автомобиля | Мерседес-Бенц | Мерседес-Бенц |
Модель автомобиля: | (190Е 1.8) | (600 СЕЛИ) |
Длина автомобиля: Ширина автомобиля: Высота автомобиля: Колесная база: Колея передняя/задняя: Диаметр поворотной окружности Дорожный просвет | 4448 [мм] 1690 [мм] 1375 [мм] 2665 [мм] 1437/1418 [мм] 10,6 [м] 155 [мм] | 5115 [мм] 1885 [мм] 1500 [мм] 3040 [мм] 1600/1575 [мм] 12,5 [м] 150 [мм] |
Тип рулевого управления:
Многоосное рулевое управление (двойное управляемый автомобиль):
|
Фигурка на
Восьмиколесный автомобиль должен иметь лирообразный трение на задних колесах, не поворачивая
через общий центр. |
 Все передние колеса поворачиваются на угол d
Все передние колеса поворачиваются на угол d
Для автомобилей с двойным управлением, при повороте обоих передних колес на каждую ось должен быть свой Аккерманн связь. Это само по себе не дает истинного качения всех колес, потому что передние комплект колес должен поворачиваться под разными углами от второго комплекта колеса. Для этого соединение между двумя осями предназначен для придания большей степени поворота передним установленным колесам.
Когда более одной оси используется в задней части автомобиля, истинное качающееся движение не может быть достигнуто, потому что эти колеса обычно не могут вращаться. Чем дальше эти оси друг от друга большее количество скраба. Таким образом, чтобы выровнять износ, оси должны быть как можно ближе друг к другу, а центр вращения должен быть взят через линию посередине между осями.
Управление задними колесами системы:
Системы управления задними колесами
служат для улучшения стационарных и динамических характеристик рулевого управления.
Принципы
При средней и высокой скорости, поворачивая задние колеса в том же направлении, что и передние колеса, для контролируемый короткий промежуток времени, приводит к увеличению устойчивости автомобиля. На низком скорости, поворот их в обратном направлении улучшает маневренность (уменьшение радиуса поворота примерно на 10%).
Функции
Входные переменные системой являются угол поворота рулевого колеса и скорость движения. Для безопасности системы причинам, они записываются избыточно. По этим цифрам блок управления определяет оптимальный угол (желаемое значение) задних колес, сравнивает это значение с фактическим значением и генерирует соответствующий выходной сигнал для сервопривод. Сервопривод быстро и точно регулирует положение заднего колеса. угол поворота рулевого колеса до заданного желаемого значения. Требуемый динамический контроль положение цилиндра определяется цифровым контроллером положения.
Компоненты
Датчики:
Бесконтактный, индуктивный
Датчик определяет угол поворота переднего колеса косвенно через
угол поворота руля. Скорость движения определяется с помощью системы ABS.
датчики скорости и по сигналу спидометра.
Блок управления:
Блок управления представляет собой двухканальный компьютер. Два компьютера сравнивают свои результаты друг с другом, в случае расхождений; обычное рулевое управление передними колесами сохраняется.
Привод:
Привод устанавливает желаемое угол поворота задней оси и который может быть электрическим, механическим или гидравлическим. Гидравлические задние колеса через рулевые тяги установлены с обеих сторон. Это включает электрически управляемые гидравлические клапаны, сервоцилиндр, а также как датчики угла поворота задних колес. Цепь подачи давления сервопривода состоит из гидроаккумулятора, клапана заряда гидроаккумулятора, датчик и радиально-поршневой насос с приводом от двигателя внутреннего сгорания.
Рис. |
Показанная здесь активная задняя ось BMW работает под управлением компьютера .для уменьшения углов заднего скольжения в зависимости от скорости движения и алгоритмов ввода рулевого управления |
Электронная стабильность Программа ( ESP )
Электронная стабильность
программа представляет собой систему, использующую тормозную систему транспортных средств как инструмент для
управление транспортным средством. Конкретное вмешательство в торможение направлено на
колеса (например, левое заднее для противодействия недостаточной поворачиваемости или правое переднее во время
избыточная поворачиваемость, как показано на рисунках). Для оптимальной реализации стабильности
цели, ESP не только инициирует торможение, но и может
также вмешиваться со стороны двигателя для ускорения ведущих колес.
Геометрия рулевого управления
Это выравнивание опорные колеса и, следовательно, поворотные оси, которые гарантируют, что рулевое управление точен и отзывчив. Правильное выравнивание также поможет обеспечить минимальное износ шин. Основные углы геометрии рулевого управления связаны с кастором, развал, наклон шкворня и угол Аккермана.
Угол поворота
Это угол наклона шкворня к задней части автомобиля, что дает колесу тянущийся эффект и заставляет его действовать очень похоже на колесико на куске мебель.
Угол поворота |
На практике наклон
шкворня для придания угла кастора очень малы — до 2 или — который
означает, что колесо поворачивается вокруг точки прямо перед точкой контакта
между шиной и поверхностью дороги. Эффект этого наклона шкворня
придать рулевому колесу самоцентрирующееся действие, что означает, что если
водитель отпускает руль, опорные колеса возвращаются в исходное положение.
положение прямо вперед. Это означает, что водителю не нужно рулить.
автомобиля при движении по прямой. Эффект также дает водитель
некоторое ощущение положения опорных катков при движении на скорости. Оно делает
не влияют на маневренность автомобиля на малых скоростях, так как величина
эта возвращающая сила зависит от силы сопротивления, которая увеличивается со скоростью.
Угол развала
Это угол наклона
колесо наружу от центра автомобиля. Это опять же очень мало
угол — до 2. Придавая рулю такой наклон, чувствительность через
шина к рулю уменьшается для небольших перемещений опорного колеса.
Такие движения могут возникать при движении по неровным поверхностям, например, по неровным поверхностям.
булыжники. Вместо того, чтобы эти небольшие движения передавались через
рулевые тяги поглощаются деформированной шиной, и автомобиль держится
прямой путь.
Угол развала |
Наклон шкворня (KPI)
Это наклон шкворня шкворня к центру автомобиля. Обычно дается больший угол- 6-7 для этого наклона — для того, чтобы колесо можно было поворачивать на точку на поверхности дороги. Если бы шкворень был вертикальным, колесо должно было бы вращаться вокруг точки ниже центральной линии шкворня. Это приведет к очень тяжелое рулевое управление, особенно на низких скоростях, а также скручивающее усилие когда колеса наезжают на кочку или выбоину.
Наклон шкворня |
Этот наклон также дает
небольшое количество самоцентрирующегося действия, которое особенно полезно при низких
скорости. Когда колесо поворачивается вокруг наклонного шкворня, передняя часть
автомобиль слегка приподнят, поэтому вес автомобиля помогает
верните колеса в прямое положение.
Угол Аккермана
Когда транспортное средство поворачивает угол, все колеса должны проходить через общий центр, чтобы они могли имеют истинное катящееся действие и не царапают дорожное покрытие. Хотя это невозможно достичь ни при каких условиях, его нашел человек по имени Аккермана, что путем наклона рулевых рычагов друг к другу так, чтобы линия проецируется от каждого шкворня и встречается в точке на центральной линии транспортного средства непосредственно перед задней осью, тогда получается почти настоящее качение. задние колеса закреплены на сплошной оси и поэтому этот центр вращения должны лежать на линии, проецируемой через заднюю ось.
Угол Аккермана |
Схождение передних колес
Во время движения автомобиля
по прямой оба передних колеса должны быть параллельны, в противном случае быстрый износ шин
приведет к. Поскольку колеса имеют развал, эффект конуса, создаваемый этим
заставляет колеса выворачиваться наружу, как только автомобиль движется вперед.
рулевая тяга предотвращает это, но любой небольшой люфт в рулевой тяге
концы должны быть учтены. Это означает, что колеса должны быть установлены в положение схождения.
когда они неподвижны, как только они двигаются вперед, они принимают прямое движение
позиция.
Схождение передних колес |
Передаточное отношение
Передаточное отношение определяется
как отношение угла поворота руля к углу поворота на дороге
колеса. Обычно они варьируются от 15-20 до 1 на легковых автомобилях и от 20-36 до 1.
на грузовиках. Передаточное число рулевого управления и рулевая тяга определяют количество
руль поворачивается от упора до упора. Некоторые гидроусилители руля имеют менее двух
обороты руля от упора до упора крайние-но цифры от 2,5 до 3 есть
чаще.
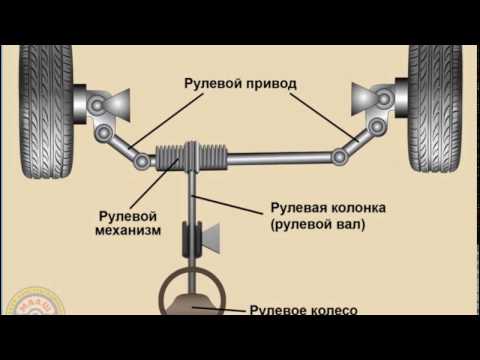
Рулевые тяги
Системы рулевого управления, используемые на автомобили сильно различаются по конструкции, но функционально очень похожи. рисунок иллюстрирует некоторые из них.
Рулевое колесо подключается валами, карданными шарнирами и виброизоляторами к рулевому редуктору целью которого является преобразование вращательного движения руля в поступательное движение, подходящее для управления колесами.
Реечная система состоит из линейно движущейся рейки и шестерни,
установленный на противопожарной перегородке или передней поперечине, которая управляет левой и
правые колеса непосредственно с помощью соединения рулевой тяги. Тяговая тяга соединяется с
рулевые рычаги на колесах, тем самым контролируя угол поворота. С галстуком
стержень, расположенный перед центром колеса, как показано на рисунке, представляет собой
конфигурация с передним управлением.
Редуктор рулевого управления представляет собой альтернативную конструкцию, используемую на легковых автомобилях и легкие грузовики. Отличается от реечной тем, что установлен на раме. редуктор рулевого управления вращает рычаг сошки, который регулирует угол поворота рулевого колеса. левое и правое колеса через серию релейных тяг и рулевых тяг, конкретная конфигурация которых варьируется от транспортного средства к транспортному средству. Заднее рулевое управление конфигурация показана на рисунке, определяется тем, что рулевая тяга рычажный механизм соединяется с рулевым рычагом за центром колеса.
Между этими двумя
Реечная система становится все более популярной для легковых автомобилей.
из-за очевидных преимуществ меньшей сложности, более легкого размещения
переднеприводных систем и адаптируемость к автомобилям без рамы. Основным функциональным отличием систем рулевого управления, используемых на тяжелых грузовиках, является
тот факт, что рулевой редуктор, установленный на раме, поворачивает левое колесо через
продольный фрикцион, а правое колесо управляется от левого колеса через
рулевая тяга.
Коробка передач первичная средство для числового сокращения между вращательным входом от рулевого управления колесо и вращательный выход вокруг управляемой оси. Рулевое колесо, чтобы Передаточное отношение опорного колеса обычно варьируется в пределах от 15 до 1 дюйма. легковых автомобилей и до целых 36 к 1 с некоторыми тяжелыми грузовиками. Изначально все реечные редукторы имели фиксированное передаточное число, и в этом случае любой изменение соотношения с углом поворота было достигнуто за счет геометрии, связи.
Сегодня, зубчатая рейка Доступны системы, которые изменяют передаточное отношение непосредственно в зависимости от угла поворота рулевого колеса.
Иллюстрация типовых систем рулевого управления |
Боковой перевод
производимая коробкой передач, передается через рычаги на рулевые рычаги на
левое и правое колеса. Кинематическая геометрия релейных звеньев и
рулевые рычаги обычно не являются параллелограммом (что дало бы равные левые
и правый угол поворота), а скорее трапецию, чтобы более точно аппроксимировать
Геометрия Аккермана, которая поворачивает внутреннее колесо под большим углом, чем
внешнее колесо.
Усилитель руля
Разные причины в сочетании для увеличения статического крутящего момента рулевого управления; шины низкопрофильные, радиальные шины, тенденция к переднему приводу и, как следствие, большая концентрация веса в передней части автомобиля.
— Гидравлический усилитель руля система
С масляным насосом напрямую приводятся в движение двигателем и постоянно генерируют гидравлическую мощность.
— Избиратель-гидравлический силовой система рулевого управления
Насос гидроусилителя руля приводимый от двигателя автомобиля через клиновидный ремень, заменяется электрически управляемый насос.
— Электроэнергия система рулевого управления
Байпас гидравлического
схема и прямое усиление рулевого управления с помощью электродвигателя.