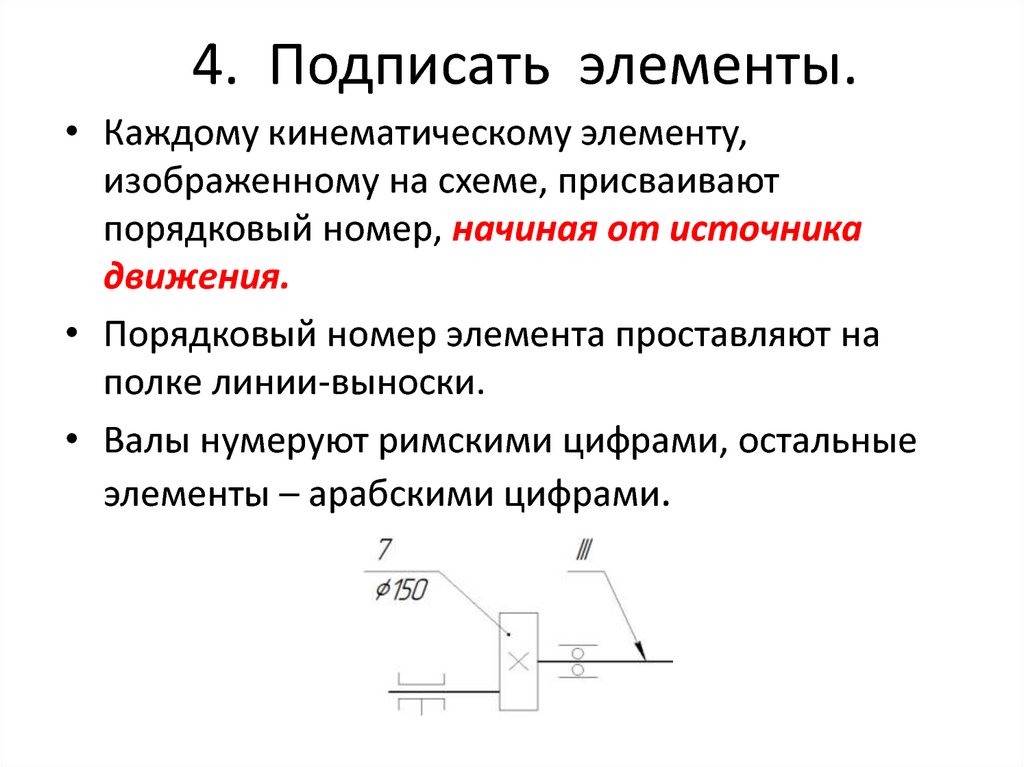
Кинематическая схема распределителя
Категория:
Машины для укладки асфальта
Публикация:
Кинематическая схема распределителя
Читать далее:
Устройство распределителя
Кинематическая схема распределителя
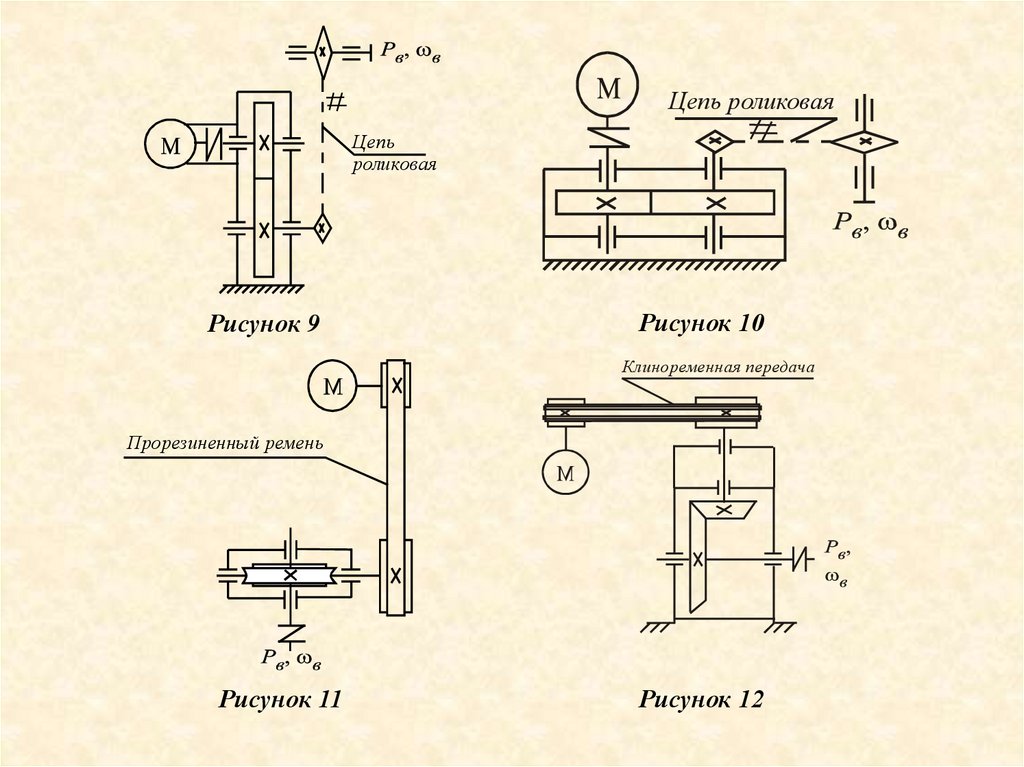
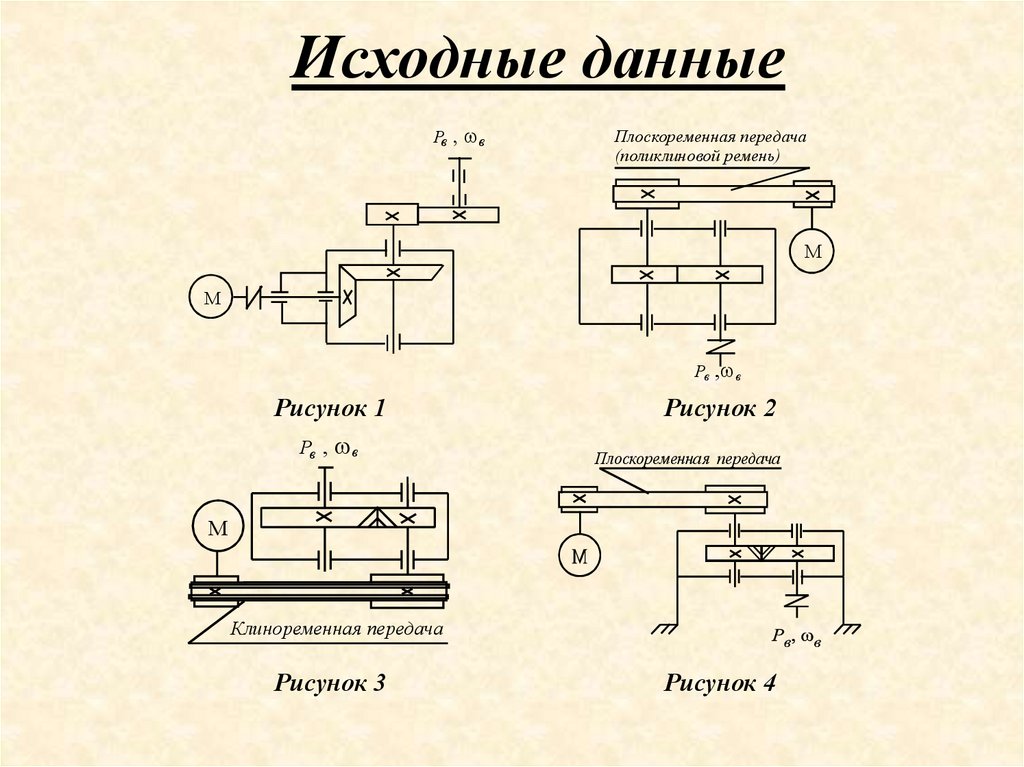
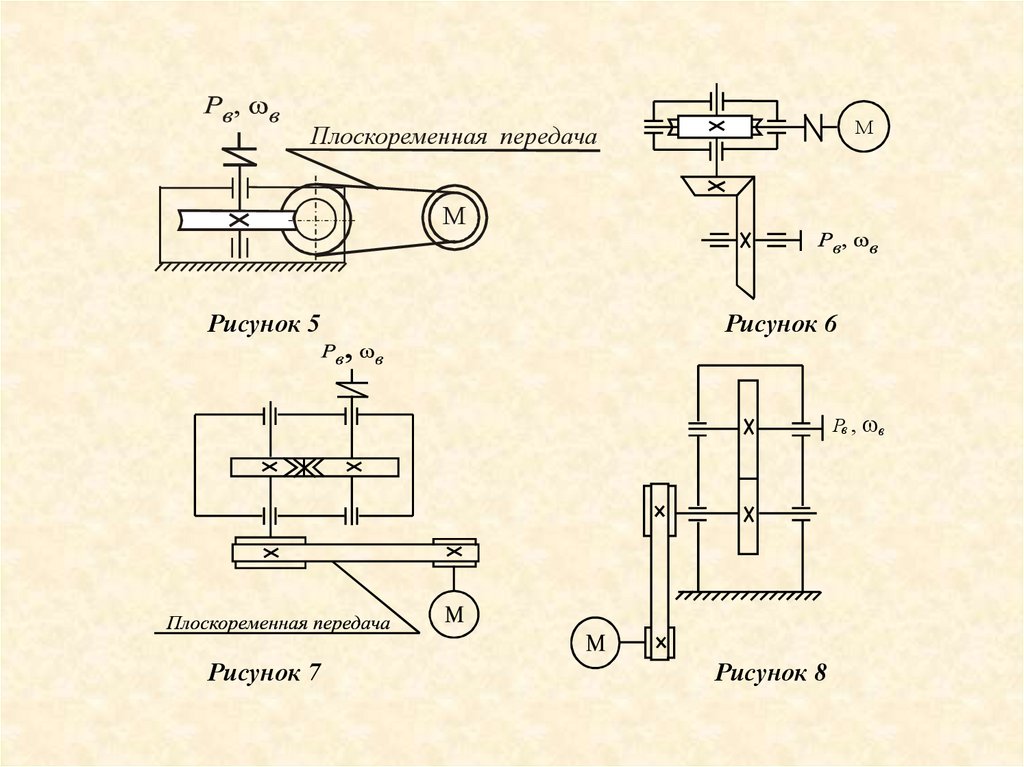
Мощность от двигателя (рис. 34) передается сцеплению двигателя. При включенном рычаге сцепления через диски сцепления мощность передается валу, на котором закреплена шестерня ходоуменьшителя. Шестерня на одном конце имеет полумуфту и может передвигаться по валу. Ходоуменьшитель состоит из двух пар шестерен. Управление ходоуменьшителем осуществляется рычагом, который передвигает шестерню с полумуфтой по валу. При включенном ходоуменьшителе шестерня соединяется с шестерней ходоуменьшителя, которая закреплена на валу. На этом же валу закреплена шестерня, которая имеет постоянное зацепление с шестерней. При отключенном ходоуменьшителе полумуфта шестерни входит в зацепление в полумуфту шестерни.
Гусеничная лента вместе с приводной звездочкой преобразует вращательное движение в поступательное. Гусеничная лента с другого конца поддерживается в натянутом состоянии ведомой звездочкой. Так передается мощность на движение правой гусенице укладчика. Аналогично после дифференциала мощность передается и левой гусенице, поэтому описание передачи мощности на левую гусеницу не приводится.
При включении II передачи мощность от вала к венцовой шестерне дифференциала передается через блок шестерни валу и далее через блок-шестерню венцовой шестерне дифференциала.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Включением блок-шестерни с блок-шестерней получают III передачу передвижения распределителя.
Получение IV передачи распределителя осуществляется путем включения шестерни с шестерней, V —от включения блок-шестерни с шестерней, а VI — при включении блок-шестерни с шестерней.
Все указанные шесть скоростей распределителя являются рабочими.
При транспортировании распределителя включается его наивысшая скорость — 2 км/ч. Передача мощности при этом осуществляется следующим образом: рычагом управления сцепления двигателя включают муфту сцепления с задними дисками. Через эти диски мощность двигателя передается на полый вал с шестерней, которая находится в постоянном зацеплении с другой цилиндрической блок-шестерней. Блок-шестерня соединяется с шестерней, которая при помощи шпоночного соединения соединена с полым валом, на конце которого находится коническая шестерня. Эта коническая шестерня в свою очередь находится в постоянном зацеплении с конической шестерней, сидящей на валу. Дальнейшая передача мощности от вала производится в порядке, указанном выше.
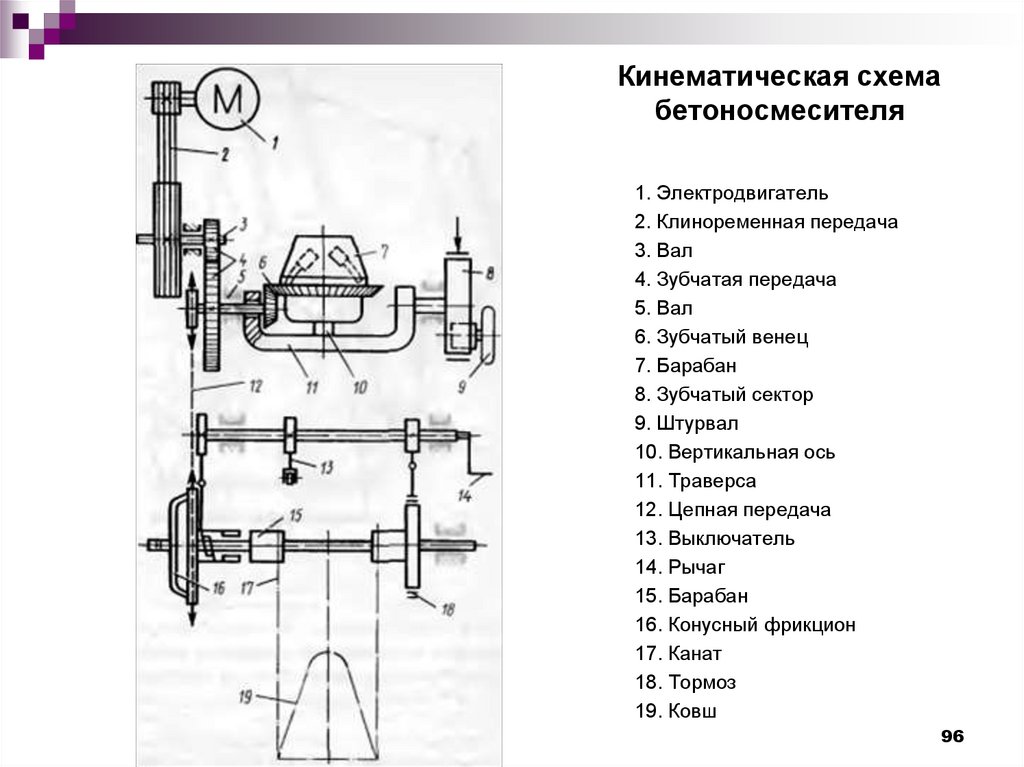
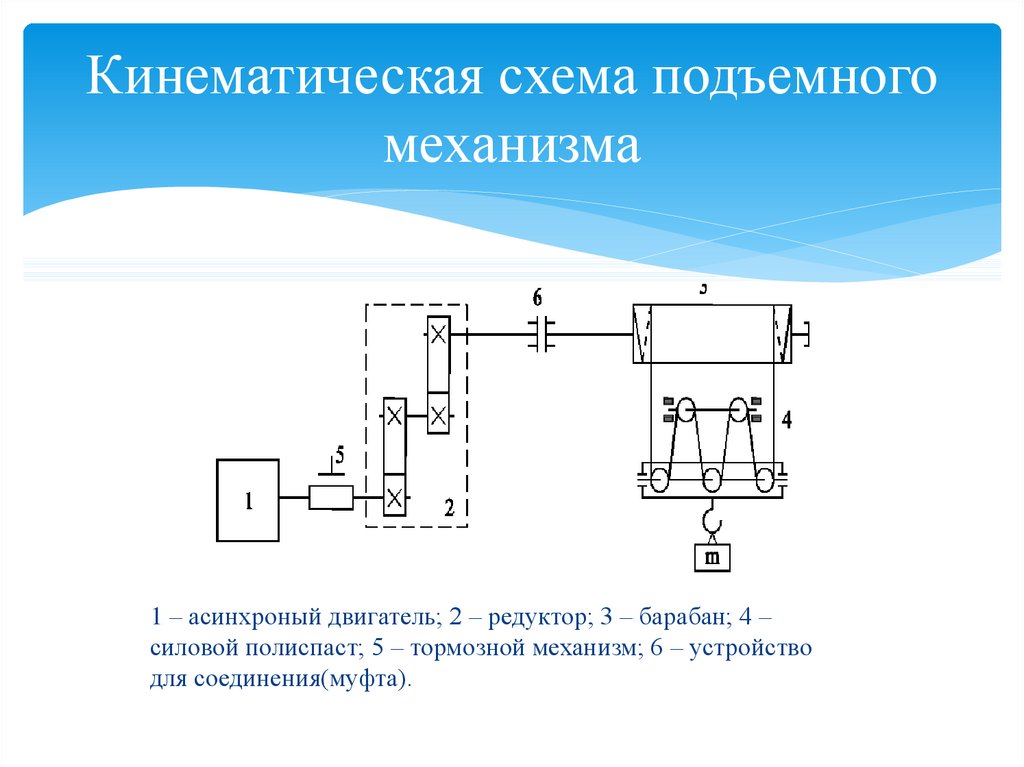
Рис. 34. Кинематическая схема асфальтоукладчика ДС-54:
1— вал гидронасоса НШ-10; 2 — двигатель; 3 — сцепление; 4 — вал; 5, 7, S, 49 — шестерни ходоуменьшителя; 6 — вал ходоуменыпителя; 9, 13, 17, 20, 24, 28, 46, 53 — вал; 10 — коническая шестерня; 11 — блок-шестерня включения V и VI передач; 12 — блок-шестерня включения II и III передач; 14 — шестерня включения IV передачи; 15 — шестерня включения I передачи; 16 — шестерня; 18, 19 — шестерни заднего хода; 21 — звездочка привода гусеничного хода; 22 — ведущая звездочка гусеничного хода; 23, 25, 27 — звездочки привода гусеничного хода; 26 — цепь привода гусеничного хода; 29, 30 — шестерни привода гусеничного хода; 31 — тормозной барабан; 32 — вал-полуось; 33 — полумуфта блокировки дифференциала; 35, 49, 57 — шестерни: 36 — дифференциал; 37 — венцовая шестерня дифференциала; 38 — сателлит; 39, 40, 56 — блок шестерни; 41 — шестерня включения VI передачи; 42 — коническая шестерня блока шестерен; 43, 58 — реверс; 44, 45 — коническая шестерня; 47 — блок-шестерня реверса; 48 — гидронасос НШ-67; 50, 51 — шестерня привода гидронасо-са; 52 — блок-шестерня привода гидронасоса; 54, 55 — конические шестерни привода гидронасоса, 59 — малая шестерня; 60 — большая шестерня; 61—диск сцепления; 62, 63 — шестерни привода гидронасоса НШ-10;
А — рычаг включения гидронасоса НО-Ю; Б — рычаг включения муфты сцепления двигателя; В — рычаг управления коробкой передач; Г — рычаг тормоза правой гусеницы; Д — рычаг включения блокировки дифференциала; Е — рычаг тормоза левой гусеницы; И — рычаг управления реверсом; К — рычаг включения гидронасоса HIII-67; Л — рычаг включения ходоуменьшителя
Кроме передачи мощности на передвижение распределителя, от дизельного двигателя отбирается часть мощности для привода двух гидронасосов НШ-10 и НШ-67.
Коническая шестерня находится в постоянном зацеплении с конической шестерней, сидящей на валу совместно с цилиндрической шестерней. Крутящий момент с цилиндрической шестерни передается через промежуточную шестерню на шестерню, сидящую на валу гидронасоса. Гидронасос подает масло в систему под давлением для привода гидромотора рабочих органов.
Второй гидронасос НШ-10 приводится в действие от распределительной шестерни дизельного двигателя через промежуточную цилиндрическую шестерню 63 на шестерню, сидящую на шариковой муфте вала гидронасоса. Управление включением гидронасоса производится рычагом А, который включает или выключает шариковую муфту.
Гидронасос НШ-10 подает масло в гидроцилиндры подъема и опускания рамы рабочих органов, подъема и опускания боковых стенок приемного бункера, а при укладке цементобетонных смесей служит для поворота рамы рабочих органов.
При укладке асфальтобетонных покрытий гидромотором (рис. 35) типа ПМ-5 приводится в действие генератор 3Г-105 через клиноременную передачу, состоящую из двух шкивов, закрепленных один на распределительном валу, а другой — на валу генератора. Кроме того, на распределительном валу закреплен шкив клиноременной передачи, при помощи которой мощность передается эксцентриковому валу, соединенному при помощи шатунов с трамбующим брусом. При этом трамбующий брус будет производить возвратно-поступательное движение, уплотняя асфальтобетонную смесь. При оборотах гидромотора 1380 об/мин трамбующий брус будет производить 1100 кол/мин, а генератор около 2000 об/мин.
При укладке бетонной смеси мощность от гидромотора (рис. 36) передается через кли-ноременную передачу на промежуточный вал, с которого крутящий момент второй клиноременной передачей передается на распределительный вал. С распределительного вала часть мощности через гибкие сочленения передается виброплитам, а часть через третью клиноременную передачу передается вибратору.
При оборотах вала гидромотора ПМ-5, равным 1380 об/мин, вибраторы имеют 3600 кол/мин.
Распределитель является самоходной машиной на гусеничном ходу. Машина имеет сменные рабочие органы, позволяющие укладывать асфальтобетонные смеси и щебень. Для укладки щебня на машине устанавливаются виброплиты, уплотняющие распределяемый щебень, а выглаживающая плита с системой подогрева заменяется опорной плитой.
При распределении цементобетонных смесей и цементогрунта на машине устанавливается специальный рабочий орган. В зависимости от вида распределяемого материала укладчик должен передвигаться по песчаному или твердому основанию. Для обеспечения необходимого тягового усилия при работе по распределению материалов укладчик имеет два комплекта сменных гусеничных лент. Для передвижения укладчика по песчаному основанию используются гусеничные ленты с башмаками высотой 60 мм.
Рис. 35. Кинематическая схема привода трамбующего бруса асфальтоукладчика
Рис. 36. Кинематическая схема привода вибраторов
36. Кинематическая схема привода вибраторов
Архив Приложение к журналу Ключевые слова Пароль ВХОД регистрация Другие журналы
| Анализ кинематических схем проходных центральных редукторов главных передач # 07, июль 2015 DOI: 10.7463/0715.0782771 Файл статьи:
SE-BMSTU. автор: Лахтюхов М. Г.
Разработке центрального редуктора проходного ведущего моста предшествует выбор его кинематической схемы, определяющей важнейшие свойства автомобиля. На примерах доказывается влияние типа зацепления, кинематической схемы и взаимного расположения зубчатых или червяных колес центрального редуктора на массу ведущего моста, на размещение двигателя и тормозных механизмов, на компоновку автомобиля в целом, на возможность применения длинноходной подвески, организации дифференци-альной связи между мостами и передачи крутящего момента к следующему мосту.
Поделиться: |
| ||||||||||
| ||||||||||||
 ..o034.pdf
(1385.45Кб)
..o034.pdf
(1385.45Кб) Показывается, что в большинстве случаев проходные редукторы получаются путем присоединения к коническому или гипоидному редуктору спереди или сзади двухвальных раздаточных коробок с соосным или несоосным расположением выходных валов. По совокупности свойств для автомобилей, оснащаемых длинноходной зависимой или независимой подвеской, наиболее рациональной является разнесенная главная передача с цилиндро-коническим и коническим центральными редукторами соответственно в проходном и непроходном мостах. Двойные цилиндро-конические центральные редукторы в проходных и непроходных мостах целесообразно применять при необходимости обеспечения унификации картерных деталей мостов, повышения защищенности и увеличения долговечности карданной передачи привода непроходного моста.
Показывается, что в большинстве случаев проходные редукторы получаются путем присоединения к коническому или гипоидному редуктору спереди или сзади двухвальных раздаточных коробок с соосным или несоосным расположением выходных валов. По совокупности свойств для автомобилей, оснащаемых длинноходной зависимой или независимой подвеской, наиболее рациональной является разнесенная главная передача с цилиндро-коническим и коническим центральными редукторами соответственно в проходном и непроходном мостах. Двойные цилиндро-конические центральные редукторы в проходных и непроходных мостах целесообразно применять при необходимости обеспечения унификации картерных деталей мостов, повышения защищенности и увеличения долговечности карданной передачи привода непроходного моста. При этом в случае дифференциальной связи между мостами и одинаковых вертикальных на-грузках на мосты в центральном редукторе первого моста трехосной тележки придется использовать несимметричный межосевой дифференциал, в отличие от центрального ре-дуктора второго проходного моста этой же тележки, где устанавливается симметричный межосевой дифференциал.
При этом в случае дифференциальной связи между мостами и одинаковых вертикальных на-грузках на мосты в центральном редукторе первого моста трехосной тележки придется использовать несимметричный межосевой дифференциал, в отличие от центрального ре-дуктора второго проходного моста этой же тележки, где устанавливается симметричный межосевой дифференциал.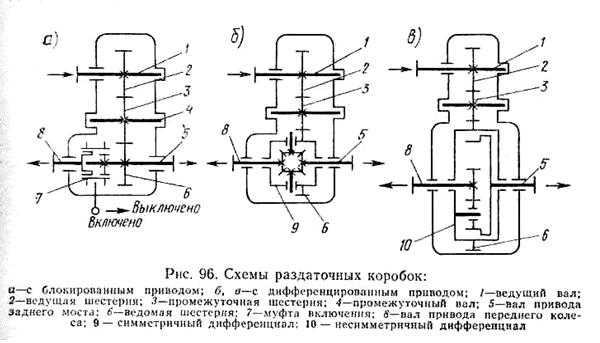 М.: Транспорт, 1972. 280 с.
М.: Транспорт, 1972. 280 с. Н.Э.Баумана
Н.Э.Баумана : +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00)
: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00)Дифференциальная кинематика | SpringerLink
L. Sciavicco, B. Siciliano, Моделирование и управление роботами-манипуляторами (Springer Science & Business Media, London, 2000)
CrossRef МАТЕМАТИКА Google ученый
Р. Фезерстоун, Алгоритмы динамики твердого тела (Springer, Boston, 2008)
CrossRef МАТЕМАТИКА Google ученый
Дж. Денавит, Р. Хартенберг, Кинематическая запись для механизмов младших пар на основе матриц. Транс. КАК Я. Дж. Заявл. мех. 22 , 215–221 (1955)
MathSciNet МАТЕМАТИКА Google ученый
 «>
«>Р.М. Мюррей, З. Ли, С.С. Састри, Математическое введение в роботизированные манипуляции (CRC Press, Бока-Ратон, 1994)
МАТЕМАТИКА Google ученый
Дж. Юань, Управление манипулятором с обратной связью с использованием кватернионной обратной связи. IEEE Дж. Робот. автомат. 4 (4), 434–440 (1988)
CrossRef Google ученый
Х. Г. Кватни, Г. Бланкеншип, Нелинейное управление и аналитическая механика: вычислительный подход (Springer, New York/Birkhauser, 2000)
CrossRef МАТЕМАТИКА Google ученый
Г. Странг, Линейная алгебра и ее приложения , Cengage Learning, 4-е изд., 19 июля 2005 г.
Google ученый
К. Кройц-Дельгадо, М.
 Лонг, Х. Сераджи, Кинематический анализ манипуляторов с 7 степенями свободы. Междунар. Дж. Робот. Рез. 11 (5), 469–481 (1992)
Лонг, Х. Сераджи, Кинематический анализ манипуляторов с 7 степенями свободы. Междунар. Дж. Робот. Рез. 11 (5), 469–481 (1992)CrossRef Google ученый
А. Секигучи, Ю. Атобе, К. Камета, Д. Ненчев, Ю. Цумаки, О генерации движения гуманоидного робота с помощью SC-подхода, в Ежегодная конференция Японского общества робототехники , том. 2, 2003, с. 2А27
Google ученый
Ю. Огура, Х.-О. Лим, А. Таканиши, Генерация растянутой модели ходьбы для двуногого робота-гуманоида, в IEEE/RSJ International Conference on Intelligent Robots and Systems , 2003, стр. 352–357
. Google ученый
Р. Куразуме, С. Танака, М. Ямасита, Т. Хасегава, К. Йонеда, Ходьба двуногого робота на прямых ногах, в 2005 Международная конференция IEEE/RSJ по интеллектуальным роботам и системам , том.
 2 (IEEE, 2005), стр. 337–343
2 (IEEE, 2005), стр. 337–343Google ученый
М. Морисава, С. Кадзита, К. Канеко, К. Харада, Ф. Канехиро, К. Фудживара, Х. Хирукава, Генерация шаблона двуногого хождения, ограниченного параметрической поверхностью, в IEEE International Conference on Robotics and Автоматика , 2005, стр. 2405–2410
Google ученый
К. Камета, А. Сэкигучи, Ю. Цумаки, Д. Ненчев, Управление ходьбой с использованием подхода SC для роботов-гуманоидов, в Международная конференция IEEE-RAS по роботам-гуманоидам , 2005 г., стр. 289–294
Google ученый
К. Такахаши, М. Нода, Д. Ненчев, Ю. Цумаки, А. Секигути, Статическая прогулка гуманоидного робота на основе метода согласованности с сингулярностью, в IEEE/RSJ Международная конференция по интеллектуальным роботам и системам , 2006, стр.
 5484–5489
5484–5489Google ученый
К. Камета, А. Сэкигучи, Ю. Цумаки, Ю. Канамия, Управление ходьбой вокруг сингулярности с использованием сферического перевернутого маятника с опорой под полом, в IEEE-RAS International Conference on Humanoid Robots , 2007, стр. 210–215
Google ученый
Н. Хандхару, Дж. Юн, Г. Ким, Генерация модели походки с растяжкой колена для двуногого робота с использованием пальцевых и пяточных суставов, в Международная конференция IEEE-RAS по роботам-гуманоидам , Тэджон, Корея, 2008 г., стр. 265–270
Google ученый
З. Ли, Н.Г. Цагарикис, Д.Г. Колдуэлл, Б. Вандерборхт, Генерация траектории ходьбы с выпрямленным коленом для робота-гуманоида iCub, в Международная конференция IEEE по управлению, автоматизации, робототехнике и зрению , 2010, стр.
 2355–2360
2355–2360Google ученый
Ю. Харада, Дж. Такахаши, Д. Ненчев, Д. Сато, Ходьба на основе предельного цикла трехмерного двуногого 7DoF с плоскостопием, в 2010 Международная конференция IEEE/RSJ по интеллектуальным роботам и системам , октябрь 2010. С. 3623–3628
. Google ученый
С. Котосака, Х. Отаки, Выборочное использование исполнительного механизма для робота-гуманоида с помощью единственной конфигурации. Дж. Робот. соц. Япония. 25 (8), 115–121 (2007)
Перекрёстная ссылка Google ученый
Х. Арисуми, С. Миоссек, Ж.-Р. Шардонне, К. Йокои, Динамический подъем за счет движения всего тела роботов-гуманоидов, Международная конференция IEEE/RSJ по интеллектуальным роботам и системам , 2008 г., 2008 г., стр. 668–675
Google ученый
 «>
«>К. Левенберг, Метод решения некоторых нелинейных задач методом наименьших квадратов. Q.J. Appl. Мат. II (2), 164–168 (1944)
Google ученый
Ю. Накамура, Х. Ханафуса, Решения обратной кинематики с устойчивостью к сингулярностям для управления роботом-манипулятором. Дж. Дин. Сист. Meas Control 108 (3), 163 (1986)
Google ученый
CW Wampler, Обратные кинематические решения манипулятора, основанные на векторных формулировках и демпфированных методах наименьших квадратов. IEEE транс. Сист. Человек Киберн. 16 (1), 93–101 (1986)
CrossRef МАТЕМАТИКА Google ученый
Т. Сугихара, Независимая от разрешимости обратная кинематика методом Левенберга-Марквардта. IEEE транс. Робот. 27 (5), 984–991 (2011)
CrossRef Google ученый
 «>
«>Д. Ненчев, Отслеживание траекторий манипулятора с обычными сингулярностями: нуль-космический подход. Междунар. Дж. Робот. Рез. 14 (4), 399–404 (1995)
CrossRef Google ученый
Д. Ненчев, Ю. Цумаки, М. Утияма, Параметризация движения и управления роботом, согласующаяся с сингулярностью. Междунар. Дж. Робот. Рез. 19 (2), 159–182 (2000)
CrossRef Google ученый
С. Таки, Д. Ненчев, Новая инверсная кинематическая декомпозиция, совместимая с сингулярностью, для манипуляторов типа S-R-S, в Международная конференция IEEE по робототехнике и автоматизации , Гонконг, Китай, 2014 г., стр. 5070–5075
Google ученый
Ю. Цумаки, Д. Ненчев, С. Котера, М. Утияма, Телеоперация на основе сопряженного подхода Якоби. Система управления IEEE.
 Маг. 17 (1), 53–62 (1997)
Маг. 17 (1), 53–62 (1997)CrossRef Google ученый
Г.Х. Голуб, С.Ф. Ван Лоан, Матричные вычисления (Издательство Университета Джона Хопкинса, Балтимор, 1996)
МАТЕМАТИКА Google ученый
А.А. Мацеевский, С.А. Кляйн, Разложение по сингулярным числам: вычисления и приложения к робототехнике. Междунар. Дж. Робот. Рез. 8 (6), 63–79 (1989)
CrossRef Google ученый
Т. Йошикава, Управление роботизированными механизмами. Междунар. Дж. Робот. Рез. 4 (2), 3–9 (1985)
CrossRef Google ученый
Ю. Огура, Х. Айкава, К. Симомура, Х. Кондо, А. Морисима, Х.-О. Лим, А. Таканиши, Разработка нового робота-гуманоида WABIAN-2, Международная конференция IEEE по робототехнике и автоматизации , 2006 г.
 , стр. 76–81
, стр. 76–81Google ученый
Т. Уимбок, Д. Ненчев, А. Альбу-Шаффер, Г. Хирцингер, Экспериментальное исследование динамических безреактивных движений гуманоидного робота Джастина DLR, в Международная конференция IEEE/RSJ по интеллектуальным роботам и системам , 2009 г. (IEEE, Сент-Луис, 2009 г.), стр. 5481–5486
CrossRef Google ученый
К. Канеко, Ф. Канехиро, М. Морисава, К. Акачи, Г. Миямори, А. Хаяси, Н. Канехира, Гуманоидный робот HRP-4 – гуманоидная робототехническая платформа с легким и тонким телом, в IEEE Международная конференция по интеллектуальным роботам и системам , 2011 г., стр. 4400–4407
Google ученый
И.-В. Парк, Дж.-Ю. Ким, Дж. Ли, Дж.-Х. О, механическая конструкция гуманоидной роботизированной платформы HUBO.
 Доп. Робот. 21 (11), 1305–1322 (2007)
Доп. Робот. 21 (11), 1305–1322 (2007)CrossRef Google ученый
М. Цукер, С. Джу, М. Грей, К. Расмуссен, Э. Хуанг, М. Стилман, А. Бобик, Система общего назначения для дистанционного управления роботом-гуманоидом DRC-HUBO. Дж. Полевой робот. 32 (3), 336–351 (2015)
CrossRef Google ученый
Т. Бушманн, С. Ломайер, Х. Ульбрих, Робот-гуманоид Лола: дизайн и управление ходьбой. Дж. Физиол. Париж 103 (3–5), 141–148 (2009)
CrossRef МАТЕМАТИКА Google ученый
А. Бен-Исраэль, Т.Н. Greville, Обобщенные инверсии — теория и приложения . Книги CMS по математике, 2-е изд. (Спрингер, Нью-Йорк, 2003 г.)
Google ученый
А.
 Льежуа, Автоматическое диспетчерское управление конфигурацией и поведением многотельных механизмов. IEEE транс. Сист. Человек Киберн. 7 (12), 868–871 (1977)
Льежуа, Автоматическое диспетчерское управление конфигурацией и поведением многотельных механизмов. IEEE транс. Сист. Человек Киберн. 7 (12), 868–871 (1977)CrossRef МАТЕМАТИКА Google ученый
Ю. Накамура, Advanced Robotics: Redundancy and Optimization (Addison-Wesley Publishing Company, Reading, 1991)
Google ученый
Т. Асфур, Р. Диллманн, Человекоподобное движение гуманоидного робота-манипулятора на основе решения обратной кинематической задачи в закрытой форме, в Международная конференция IEEE/RSJ по интеллектуальным роботам и системам , Лас-Вегас (IEEE, 2003), стр. 1407–1412
Google ученый
М. Симидзу, Х. Какуя, В.-К. Юн, К. Китагаки, К. Косугэ, Аналитическое обратное кинематическое вычисление для избыточных манипуляторов с 7 степенями свободы с совместными пределами и его применение для разрешения избыточности.
 IEEE транс. Робот. 24 (5), 1131–1142 (2008)
IEEE транс. Робот. 24 (5), 1131–1142 (2008)CrossRef Google ученый
Р.К. Луо, Т.-В. Лин, Ю.-Х. Цай, Аналитическое инверсионное кинематическое решение для модульных резервных манипуляторов с 7 степенями свободы со смещениями на плече и запястье, в IEEE/RSJ International Conference on Intelligent Robots and Systems , Чикаго, 2014, стр. 516–521
Google ученый
Дж. Бердик, Об обратной кинематике избыточных манипуляторов: характеристика многообразий самодвижения, в Международная конференция IEEE по робототехнике и автоматизации , Скоттсдейл, 1989, стр. 264–270
Google ученый
Д. Уитни, Решено управление скоростью движения манипуляторов и человеческих протезов. IEEE транс. Человек Мах. Сист. 10 (2), 47–53 (1969)
CrossRef MathSciNet Google ученый
 «>
«>Д. Ненчев, Разрешение избыточности посредством локальной оптимизации: обзор. Дж. Робот. Сист. 6 (6), 769–798 (1989)
CrossRef МАТЕМАТИКА Google ученый
Б. Сицилиано, Кинематическое управление резервными манипуляторами роботов: учебное пособие. Дж. Интелл. Робот. Сист. 3 (3), 201–212 (1990)
CrossRef Google ученый
Т. Йошикава, Анализ и управление роботами-манипуляторами с резервированием, Первый международный симпозиум по исследованиям в области робототехники , Питтсбург (MIT Press, Кембридж, Массачусетс, 1994), стр. 735–747
Google ученый
К.А. Кляйн, Б.Е. Блахо, Меры ловкости для проектирования и управления кинематически избыточными манипуляторами. Междунар. Дж. Робот. Рез. 6 (2), 72–83 (1987)
CrossRef Google ученый
 «>
«>К.Л. Доти, К. Мелчиорри, К. Бонивенто, Теория обобщенных инверсий в применении к робототехнике. Междунар. Дж. Робот. Рез. 12 (1), 1–19 (1993)
CrossRef Google ученый
J. Baillieul, Избегание препятствий и устранение кинематической избыточности, в Международная конференция IEEE по робототехнике и автоматизации , 1986, стр. 1698–1704
Google ученый
Х. Сераджи, Управление конфигурацией резервных манипуляторов: теория и реализация. IEEE транс. Робот. автомат. 5 (4), 472–490 (1989)
CrossRef Google ученый
Дж. Пак, В. Чанг, Ю. Юм, О динамической развязке кинематически избыточных манипуляторов, в Международная конференция IEEE/RSJ по интеллектуальным роботам и системам , 1999, стр. 1495–1500
Google ученый
 «>
«>О. Канун, Ф. Ламиро, П.-Б. Вибер, Кинематическое управление избыточными манипуляторами: обобщение структуры приоритета задачи на задачу неравенства. IEEE транс. Робот. 27 (4), 785–792 (2011)
CrossRef Google ученый
М. Лю, А. Микаэлли, П. Эврард, А. Эсканде, К. Андриот, Интерактивные виртуальные люди: двухуровневая система управления приоритетами с гаечными ограничениями. IEEE транс. Робот. 28 (6), 1309–1322 (2012)
CrossRef Google ученый
М. Брандао, Л. Хамоне, П. Кричка, Н. Эндо, К. Хашимото, А. Таканиши, Достижение недостижимого: интеграция движения и движений всего тела для расширенного визуально управляемого достижения, в IEEE — Международная конференция РАН по роботам-гуманоидам , 2013
Google ученый
 «>
«>А.Е.Альберта, Регрессия и псевдообратная реакция Мура-Пенроуза , 1-е изд. (Академик Пресс, Нью-Йорк, 1972)
МАТЕМАТИКА Google ученый
М.С. Константинов, М.Д. Марков, Д. Ненчев, Кинематическое управление резервными манипуляторами, 11-й Международный симпозиум по промышленным роботам , Токио, 1981, стр. 561–568
Google ученый
Х. Ханафуса, Т. Йошикава, Ю. Накамура, Анализ и управление шарнирными роботами-манипуляторами с резервированием, в Подготов. IFAC ’81 World Congress , 1981, стр. 78–83.
Google ученый
Д. Ненчев, Ограниченные матрицы Якоби избыточных манипуляторов в задачах с ограниченным движением. Междунар. Дж. Робот. Рез. 11 (6), 584–597 (1992)
CrossRef Google ученый
 «>
«>Д. Ненчев, Рекурсивная локальная кинематическая инверсия с динамическим распределением приоритетов задач, в Международная конференция IEEE по робототехнике и автоматизации , Мюнхен, 1994, стр. 2698–2703
Google ученый
Б. Сицилиано, Ж.-Ж. Слотин, Общая структура для управления несколькими задачами в роботизированных системах с высокой избыточностью, в Fifth International Conference on Advanced Robotics (IEEE, 1991), стр. 1211–1216
. Google ученый
Г. Антонелли, Анализ устойчивости алгоритмов обратной кинематики с обратной связью по приоритетам для резервных роботизированных систем. IEEE транс. Робот. 25 (5), 985–994 (2009)
CrossRef Google ученый
Х. Садегян, Л. Виллани, М. Кешмири, Б. Сицилиано, Динамическое многоприоритетное управление в резервных роботизированных системах.
 Robotica 31 , 1–13 (2013)
Robotica 31 , 1–13 (2013)CrossRef Google ученый
Л. Сентис, О. Хатиб, Синтез поведения всего тела посредством иерархического контроля поведенческих примитивов. Междунар. Дж. Робот-гуманоид. 2 (4), 505–518 (2005)
CrossRef Google ученый
А.А. Мацеевский, С.А. Кляйн, Уклонение от препятствий для кинематически избыточных манипуляторов в динамически меняющихся средах. Междунар. Дж. Робот. Рез. 4 (3), 109–117 (1985)
CrossRef Google ученый
Хатиб О., Обход препятствий в режиме реального времени для манипуляторов и мобильных роботов. Междунар. Дж. Робот. Рез. 5 (1), 90–98 (1986)
CrossRef Google ученый
К. Гласс, Р.
 Колбо, Д. Лим, Х. Сераджи, Предотвращение столкновений в реальном времени для избыточных манипуляторов. IEEE транс. Робот. автомат. 11 (3), 448–457 (1995)
Колбо, Д. Лим, Х. Сераджи, Предотвращение столкновений в реальном времени для избыточных манипуляторов. IEEE транс. Робот. автомат. 11 (3), 448–457 (1995)CrossRef Google ученый
Д. Ненчев, З. Сотиров, Динамическое распределение приоритетов задач для кинематически избыточных робототехнических механизмов, в Международная конференция IEEE/RSJ по интеллектуальным роботам и системам , Мюнхен, 1994 г., стр. 518–524
Google ученый
О. Брок, О. Хатиб, С. Виджи, Уклонение от препятствий и поведение в движении для мобильных манипуляций, Международная конференция IEEE по робототехнике и автоматизации , 2002 г., стр. 388–393
Google ученый
А. Дитрих, Т. Уимбок, А. Альбу-Шаффер, Г. Хирцингер, Реактивное управление всем телом: динамическое мобильное манипулирование с использованием большого количества приводимых в действие степеней свободы.
 IEEE-робот. автомат. Маг. 19 (2), 20–33 (2012)
IEEE-робот. автомат. Маг. 19 (2), 20–33 (2012)CrossRef Google ученый
Ф. Кейт, П.-Б. Вибер, Н. Мансард, А. Хеддар, Анализ разрывов в управлении пространством задач с приоритетами при дискретных операциях планирования задач, в Международная конференция IEEE по интеллектуальным роботам и системам , 2011 г., стр. 3887–3892
Google ученый
Дж. Ли, Н. Мансард, Дж. Парк, Промежуточный подход к желаемому значению для перехода задачи роботов в кинематическое управление. IEEE транс. Робот. 28 (6), 1260–1277 (2012)
CrossRef Google ученый
Т. Петрич, Л. Жлайпах, Плавный непрерывный переход между задачами на кинематическом уровне управления: предотвращение препятствий как задача управления. Робот. Автон. Сист. 61 (9), 948–959 (2013)
CrossRef Google ученый
 «>
«>Д. Ненчев, Ю. Цумаки, М. Учияма, Управление движением в реальном времени в окрестностях особенностей: сравнительное исследование методов SC и DLS, в Международная конференция IEEE по робототехнике и автоматизации , 1999 г. , стр. 506–511
Google ученый
Мансард Н., Хатиб О., Хеддар А. Унифицированный подход к интеграции односторонних ограничений в стек задач. IEEE транс. Робот. 25 (3), 670–685 (2009)
CrossRef Google ученый
Т. Петрич, А. Гамс, Й. Бабич, Л. Жлайпах, Структура контроля рефлекторной устойчивости для роботов-гуманоидов. Автон. Роботы 34 (4), 347–361 (2013)
CrossRef Google ученый
А. Дитрих, Т. Уимбок, А. Альбу-Шаффер, Г. Хирцингер, Интеграция реактивного предотвращения самостолкновений на основе крутящего момента в иерархию задач.
 IEEE транс. Робот. 28 (6), 1278–1293 (2012)
IEEE транс. Робот. 28 (6), 1278–1293 (2012)CrossRef Google ученый
H. Sugiura, M. Gienger, H. Janssen, C. Goerick, Предотвращение столкновений в реальном времени с управлением движением всего тела для роботов-гуманоидов, в IEEE/RSJ International Conference on Intelligent Robots and Systems , 2007, стр. 2053–2058
Google ученый
О. Стассе, А. Эсканде, Н. Мансард, С. Миоссек, П. Эврар, А. Хеддар, Задача предотвращения (само)столкновения в реальном времени на гуманоидном роботе HRP-2, в Международная конференция IEEE по робототехнике и автоматизации (IEEE, 2008 г.), стр. 3200–3205
Google ученый
Дж. Чжао, Н.И. Бадлер, Инверсная кинематика в реальном времени с ограничениями по суставам и пространственными ограничениями.
 Тех. Представитель Пенсильванского университета, 1989 г.
Тех. Представитель Пенсильванского университета, 1989 г.CrossRef Google ученый
М. Де Ласа, А. Герцманн, Приоритетная оптимизация для управления пространством задач, в Международная конференция IEEE/RSJ по интеллектуальным роботам и системам , 2009 г., стр. 5755–5762
Google ученый
Х. Изерманн, Линейная лексикографическая оптимизация. ОР Спектрум 4 (4), 223–228 (1982)
CrossRef МАТЕМАТИКА Google ученый
DE Стюарт, Дж. К. Тринкл, Неявная пошаговая схема для динамики твердого тела с неупругими столкновениями и кулоновским трением. Междунар. Дж. Нумер. Методы инж. 39 (15), 2673–2691 (1996)
CrossRef MathSciNet МАТЕМАТИКА Google ученый
 «>
«>К. Ямане, Ю. Накамура, Численно надежный решатель LCP для моделирования сочлененных твердых тел в контакте, в Robotics: Science and Systems IV , Цюрих (MIT Press, 2008), стр. 89–104
Google ученый
Н. Мансар, Ф. Шометт, Последовательность задач для высокоуровневого управления на основе датчиков. IEEE транс. Робот. 23 (1), 60–72 (2007)
CrossRef Google ученый
Н. Мансард, О. Хатиб, Непрерывный закон управления от односторонних ограничений, в Международная конференция IEEE по робототехнике и автоматизации , 2008, стр. 3359–3364
Google ученый
Н. Мансар, А. Ремазей, Ф. Шометт, Непрерывность законов управления с переменным набором признаков. IEEE транс. автомат. Контроль 54 (11), 2493–2505 (2009)
CrossRef MathSciNet МАТЕМАТИКА Google ученый
 «>
«>О. Канун, Ф. Ламиро, П.-Б. Вибер, Ф. Канехиро, Э. Йошида, Ж.-П. Ломонд, Приоритизация систем линейного равенства и неравенства: применение к локальному планированию движения для резервных роботов, в Международная конференция IEEE по робототехнике и автоматизации , 2009, стр. 2939–2944
Google ученый
А. Эсканде, Н. Мансар, П.-Б. Вибер, Быстрое разрешение иерархической инверсной кинематики с ограничениями неравенства, IEEE International Conference on Robotics and Automation , 2010, стр. 3733–3738
Google ученый
О. Канун, Приоритетное кинематическое управление в реальном времени при ограничениях неравенства для избыточных манипуляторов, в Robotics: Science and Systems VII , ed. Х. Даррант-Уайт, Н. Рой, П. Аббил (MIT Press, Кембридж, Массачусетс, 2012 г.), стр. 145–152
Google ученый
 «>
«>Д. Монтана, Кинематика контакта и захвата. Междунар. Дж. Робот. Рез. 7 (3), 17–32 (1988)
CrossRef Google ученый
К.Х. Хант, Структурная кинематика параллельных роботов-манипуляторов. Дж. Мех. Транс. автомат. Дес. 105 (4), 705 (1983)
Google ученый
А. Дитрих, К. Отт, А. Альбу-Шаффер, Многоцелевой контроль соответствия резервных манипуляторов: иерархия, управление и стабильность, в Международной конференции IEEE/RSJ по интеллектуальным роботам и системам (IEEE, 2013), стр. 3043–3050
Google ученый
Л. Сентис, Дж. Петерсен, Р. Филипсен, Реализация и анализ стабильности приоритетных контроллеров, совместимых со всем телом, на колесном роботе-гуманоиде на неровной местности. Автон. Роботы 35 (4), 301–319 (2013)
CrossRef Google ученый
 «>
«>A. Rennuit, A. Micaelli, X. Merlhiot, C. Andriot, F. Guillaume, N. Chevassus, D. Chablat, P. Chedmail, Архитектура пассивного управления для виртуальных людей, в IEEE/RSJ International Conference по интеллектуальным роботам и системам , 2005 г., стр. 1432–1437
Google ученый
К. Отт, А. Дитрих, А. Альбу-Шаффер, Приоритетный многозадачный контроль соответствия резервных манипуляторов. Автоматика 53 , 416–423 (2015)
CrossRef MathSciNet МАТЕМАТИКА Google ученый
Б. Дариуш, Г.Б. Хаммам, Д. Орин, Ограниченное разрешенное управление ускорением для гуманоидов, в IEEE/RSJ International Conference on Intelligent Robots and Systems , 2010, стр. 710–717
Google ученый
Г.Б. Хаммам, П.М. Венсинг, Б. Дариуш, Д.
 Э. Орин, Кинодинамически последовательное перенацеливание движения для гуманоидов. Междунар. Дж. Робот-гуманоид. 12 , 1550017 (2015)
Э. Орин, Кинодинамически последовательное перенацеливание движения для гуманоидов. Междунар. Дж. Робот-гуманоид. 12 , 1550017 (2015)Перекрестная ссылка Google ученый
Скачать ссылки
Читать журналы GJRE
(Пожалуйста, подождите, отображение может занять несколько секунд)
Опубликуйте видео с нами
Если картинка стоит тысячи слов, то видео стоит миллиона. Транслируйте свои исследования в видеоформате бесплатно.
Узнайте больше и отправьте свое видео
Организуйте конференцию вместе с нами
Давайте делать по-крупному. Организуйте, сотрудничайте и спонсируйте предстоящие семинары, семинары, симпозиумы, конференции и вебинары.
Contact Evangelist
Доступ к инфраструктуре научного сообщества
- Используйте нашу стандартную облачную инфраструктуру для проведения исследований.

- Получите доступ к соответствующим спонсорам исследовательского проекта.
- Автоматизированные инструменты позволяют нам сотрудничать и проверять вашу рукопись и ссылки во время процесса разработки в облаке.
Отправьте свой проект
- Используйте нашу стандартную облачную инфраструктуру для проведения исследований.
Резервуар знаний диссертаций и электронных книг
Опубликуйте у нас свою электронную книгу, диссертацию/диссертацию. Наша служба публикации электронных книг с открытым доступом позволяет авторам совместно с нами редактировать рукопись.
Отправьте свою диссертацию Отправьте свою электронную книгу
Подписка на журналы
Блог социальных инноваций
Биолокация их «жизненной энергии и лун» планет0851 Глобальные журналы | Блог о социальных инновациях и историях
Обзор моей последней статьи и доступ к блогу в Google Cloud Автор: Джон Ф.
Подробнее… Кэдди, доктор философии. прошлая производительность[…]
Кэдди, доктор философии. прошлая производительность[…]Краткий обзор «Исследование осуществимости теорий художественного перевода Сюй Юаньчуна и его открытий»
Global Journals | Блог о социальных инновациях и историяхАвтор: Fangfang Tan * Шанхайский педагогический университет, КНР. Эта статья состоит из пяти частей. Первая часть служит введением к блестящим достижениям профессора Сюй в области перевода. Он известен как первый человек, переведший классический китайский[…]
Подробнее…Разум и будущее нации-государства
Глобальные журналы | Блог социальных инноваций и историйБлог. Хосе Луис Техеда Гонсалес. Статья, опубликованная в Global Journal под названием «Разум и будущее национального государства», была сделана в рамках расширения глобализации и кризиса национальных государств. Все указывало бы на то, что регионализация и[…]
Подробнее…«Пустые места» в структуре современных культурных ландшафтов: идентификация ради социально-экономической стабильности
Глобальные журналы | Блог о социальных инновациях и историяхАвтор: Т.
Подробнее… М. КрасовскаяЭто мой первый опыт публикаций в Global Journals. Это оказалось успешным. Доволен контактами с редакцией и техническими отделами. Также это мой первый опыт блогерской деятельности – №[…]
М. КрасовскаяЭто мой первый опыт публикаций в Global Journals. Это оказалось успешным. Доволен контактами с редакцией и техническими отделами. Также это мой первый опыт блогерской деятельности – №[…]Семейные корни моего интереса к изучению критических ситуаций и участие в них волонтера
Global Journals | Блог Social Innovations & StoriesАвтор: проф. Олег ЯницкийКонечно, это в некоторой степени преувеличение, но тем не менее это правда. Так уж получилось, что мое детство совпало с длинной чередой удушающих событий и радикальных преобразований в России. Основной была ВОВ, и[…]
Подробнее…
Внедрение
Global Journals Ebooks
и тезис
Служба публикации
Начало
Недавние статьи, опубликованные в GJHSS-G
. Сравнительный анализ на Supermarks Retail Proccom , супермаркеты составляют список лучших мест для покупки продуктов питания. Большое разнообразие предметов из разных источников, которые эти места предоставляют в распоряжение потребителей, должно, среди прочего, преуспеть в бизнес-позиции. В Испании, как и во многих других частях мира, супермаркеты кажутся местом…
В Испании, как и во многих других частях мира, супермаркеты кажутся местом…
Read Paper
Обзор литературы: исследования духовности в нравственном развитии для учителей-практиков
Это исследование направлено на обзор литературы по духовности, морали и образованию. Он искал исследования, связанные с этими тремя областями, и; предложил размышление о духовности в нравственном развитии, особенно в педагогической практике. Найденные исследования демонстрируют этимологическую связь между изучаемыми областями, а также корреляцию…
Читать статью
Физическое воспитание и инвалидность в бразильских периодических изданиях (с 1979 по 2017 г.): взгляд на внешкольный контекст дискуссии о проблеме инвалидности в период с 1979 по 2017 год. Методологически он состоит из библиографического исследования и количественно-качественного подхода, основанного на…
Читать документ
Смягчение токсического стресса у молодежи из групп риска с помощью сельскохозяйственной программы продленного дня
Неблагоприятный детский опыт и сопровождающий его токсический стресс негативно сказываются на детях. Таким образом, особый интерес представляет определение стратегий, которые могли бы помочь молодежи из групп риска смягчить последствия токсического стресса. Используя феноменологический, качественно доминирующий исследовательский подход, это исследование изучает динамику токсического стресса у молодых людей из групп риска…
Таким образом, особый интерес представляет определение стратегий, которые могли бы помочь молодежи из групп риска смягчить последствия токсического стресса. Используя феноменологический, качественно доминирующий исследовательский подход, это исследование изучает динамику токсического стресса у молодых людей из групп риска…
Читать статью
Статьи в прессе
Опыт лесовосстановления как связь с образовательной средой в начальных школах Тлапа-де-Комонфорт, Герреро, Мексика
становясь с каждым днем все заметнее для всех живых существ. Именно по этой причине человек должен оглянуться назад на те пространства, которые нуждаются в лесовосстановлении, и принять их во внимание, чтобы провести необходимое лесовосстановление, а также…
Системные требования LMS с точки зрения библиотек
Библиотечные услуги необходимы для обучения. Поэтому концепция редизайна LMS должна гарантировать лучшую интеграцию библиотечных услуг, таких как каталоги, базы данных и медиа, а также управление литературой и информацией. Сравнение с другими отраслями может быть полезным: часто отношения с клиентами поддерживаются и укрепляются за счет использования учетных записей клиентов.0007
Сравнение с другими отраслями может быть полезным: часто отношения с клиентами поддерживаются и укрепляются за счет использования учетных записей клиентов.0007
Это исследование фокусируется на стратегиях обучения учащихся из франкоязычных семей, которые погружены в школы английского языка (EMI), а также на проблемах, возникающих при использовании этих стратегий. Для проведения этого исследования в столице Яунде были выбраны семь школ с преподаванием на английском языке. 400 изучающих франкоязычный язык…
Средневековое поселение в Западной Сьерра-Морене (Испания-Португалия)
Мы анализируем средневековое поселение на сельской и периферийной территории, входившей в состав Гарбаль-Андалус, Западная Сьерра-Морена. Исследование проводится на основе археологических данных и охватывает период от позднеримского периода до христианского завоевания, но особенно андалузского периода. Исторический этап, о котором мало что знали….
Преподавание и цифровые инновации в дисциплинах, связанных с информатикой и технологиями, в гимназиях Италии
. ..
..
Статьи в обзоре
Рассказы о происхождении COVID-19 в Твиттере с упором на теорию заговора
Основная идея следующего документа состоит в том, чтобы выявить и проанализировать сообщения в Твиттере о происхождении коронавируса и ответных мерах на вспышку пандемии с помощью теорий заговора, возлагающих ответственность за Китай, коммунизм и других международных социальных и политических игроков на создание и распространение S…
Особенности программ росписей современных украинских православных храмов
Статья посвящена анализу особенностей программ росписей современных украинских православных храмов, преимущественно на Востоке Украины, с точки зрения культурологии . Учитываются изменения в программах церковных росписей, изменения стилей и приемов росписи. Среди современных тенденций в фресках Ор…
Влияние трансфертных платежей на участие отцов в дошкольном возрасте в Китае: отличается ли оно в городских и сельских домохозяйствах?
. ..
..
Комплексный анализ тенденций муссонных дождей бабьего лета в прошлом веке и их изменчивости
Важность осадков для аграрной экономики, такой как Индия, хорошо известна, особенно во время муссонных месяцев бабьего лета, а именно. с июня по сентябрь. Анализ характеристик осадков за последнее столетие может дать представление об изменчивости осадков. Изменчивость количества осадков наблюдается как внутрисезонно, так и между…
Экономические кризисы и пандемии: путь к устойчивости малых и средних предприятий
Rua Antonio Elias, 189, Jardim Alzira …
США Регистрационный номер: 0423089 | Идентификатор членства OARS: 4636/AO | Идентификационный номер налогоплательщика США (Emp. ID): 098-0673227 | Лицензия №: 42125/022010/1186 | Рег. №: 430374 | Импорт-экспорт: 11027
Группа, сертифицированная по стандарту ISO 9001:2005. Global Journals Logo® является зарегистрированным товарным знаком Global Journals Incorporated и Global Journals Private Limited.