Устройство и принцип работы электродвигателя переменного тока
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов. В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Как работает электродвигатель
Двигатель работает на основе эффекта, обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов.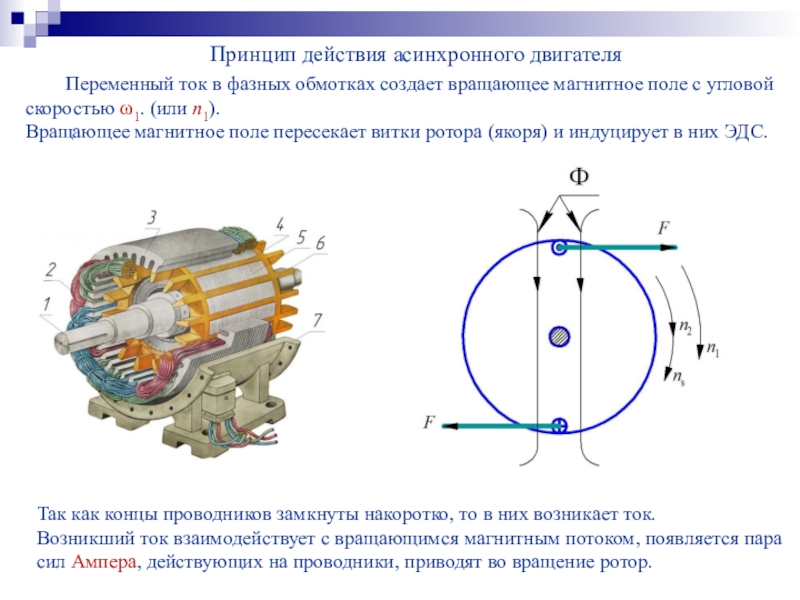
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки.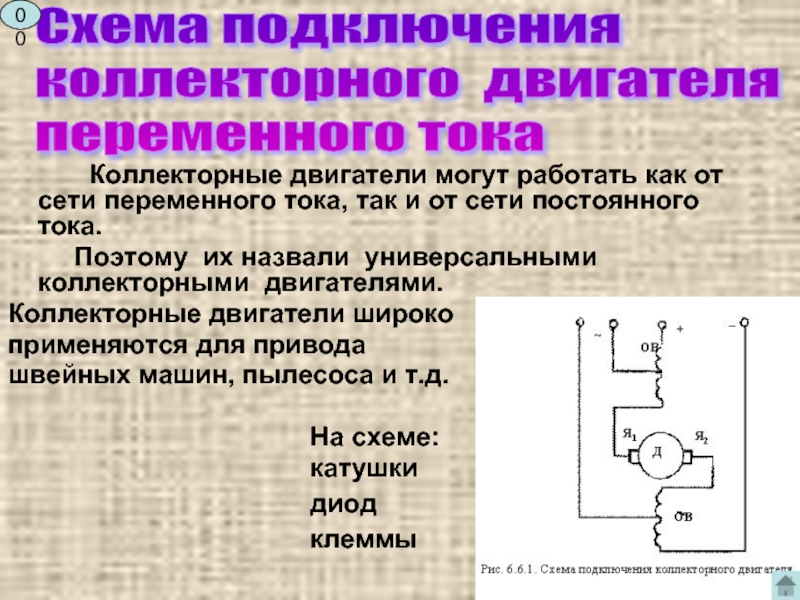 Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
- Переменного тока, работающие напрямую от электросети.
- Постоянного тока, которые работают от батареек, АКБ, блоков питания или других источников постоянного тока.
По принципу работы:
- Синхронные, в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные, самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре .
Принцип работы и устройство асинхронного электродвигателя
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.
Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.
Магнитные полюса постоянно вращаются
Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щеток или их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора. Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление.
Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье.
Самое главное о синхронных двигателях Я постарался изложить, более подробно Вы можете прочитать на них на Википедии.
Режимы работы электродвигателя в следующей статье.
Электродвигатель постоянного тока: принцип работы и действия, устройство, характеристики
Содержание
- Краткая история создания
- Принцип действия электродвигателя постоянного тока
- Устройство электродвигателя постоянного тока
- Особенности и характеристики электродвигателя постоянного тока
Сейчас невозможно представить нашу жизнь без электродвигателей. Они приводят в действие станки, бытовую технику и инструменты, поезда, трамваи и троллейбусы, компьютеры, игрушки и разные подвижные механизмы, устанавливаются на производственных станках, если частоту вращения рабочего вала требуется регулировать в широком диапазоне. Агрегаты для преобразования электрической энергии в механическую представлены множеством видов и моделей (синхронные, асинхронные, коллекторные и т.д.). Из этой статьи вы узнаете, что такое электродвигатель постоянного тока, его устройство и принцип действия.
Они приводят в действие станки, бытовую технику и инструменты, поезда, трамваи и троллейбусы, компьютеры, игрушки и разные подвижные механизмы, устанавливаются на производственных станках, если частоту вращения рабочего вала требуется регулировать в широком диапазоне. Агрегаты для преобразования электрической энергии в механическую представлены множеством видов и моделей (синхронные, асинхронные, коллекторные и т.д.). Из этой статьи вы узнаете, что такое электродвигатель постоянного тока, его устройство и принцип действия.
Краткая история создания
Разные ученые пытались создать экономичный и мощный двигатель еще с первой половины 19 века. Основой послужило открытие М.Фарадея, сделанное в 1821 г. Он обнаружил, что помещенный в магнитное поле проводник вращается. Отталкиваясь от этого, в 1833 г изобретатель Томас Дэвенпорт смог сконструировать двигатель постоянного тока, а позже, в 1834 г, ученый Б.С.Якоби придумал прообраз современной модели двигателя с вращающимся валом.
Принцип действия электродвигателя постоянного тока
На мысль о создании двигателя ученых натолкнуто следующее открытие. Помещенная в магнитное поле проволочная рамка с пропущенным по ней током начинает вращаться, создавая механическую энергию. Принцип действия электродвигателя постоянного тока основывается на взаимодействии магнитных полей рамки и самого магнита. Но одна рамка после определенного количества вращений замирает в положении, параллельном внешнему магнитному полю. Для продолжения движения необходимо добавить вторую рамку и в определенный момент переключить направление тока.
Вместо рамок в двигателе используется набор проводников, на которые подается ток, и якорь. При запуске вокруг него возбуждается магнитное поле, взаимодействующее с полем обмотки. Это заставляет якорь повернуться на определенный угол. Подача тока на следующие проводники приводит к следующему повороту якоря, и далее процесс продолжается.
Магнитное поле создается либо с помощью постоянного магнита (в маломощных агрегатах), либо с помощью индуктора/обмотки возбуждения (в более мощных устройствах).
Попеременную зарядку проводников якоря обеспечивают щетки, сделанные из графита или сплава графита и меди. Они служат контактами, замыкающими электрическую сеть на выводы пар проводников. Изолированные друг от друга выводы представляют собой кольцо из нескольких ламелей, которое находится на оси вала якоря и называется коллекторным узлом. Благодаря поочередному замыканию ламелей щетками двигатель вращается равномерно. Степень равномерности работы двигателя зависит от количества проводников (чем больше, тем равномернее).
Устройство электродвигателя постоянного тока
Теперь, когда вы знаете, как работает электродвигатель постоянного тока, пора ознакомиться с его конструкцией.
Как и у других моделей, основу двигателя составляют статор (индуктор) – неподвижная часть, и якорь вкупе с щеточноколлекторным узлом – подвижная часть. Обе части разделены воздушным зазором.
Обе части разделены воздушным зазором.
В состав статора входят станина, являющаяся элементом магнитной цепи, а также главные и добавочные полюса. Обмотки возбуждения, необходимые для создания магнитного поля, находятся на главных полюсах. Специальная обмотка, улучшающая условия коммутации, расположена на добавочных полюсах.
Якорь представляет собой узел, состоящий из магнитной системы (она собрана из нескольких листов), набора обмоток (проводников), уложенных в пазы, и коллектора, который подводит постоянный ток к рабочей обмотке.
Коллектор имеет вид цилиндра, собранного из изолированных медных пластин. Он насажен на вал двигателя и имеет выступы, к которым подходят концы секций обмотки якоря. Щетки снимают ток с коллектора, входя с ним в скользящий контакт. Удержание щеток в нужном положении и обеспечение их нажатия на коллектор с определенной силой осуществляется щеткодержателями.
Многие модели двигателей оснащены вентилятором, задача которого – охлаждение агрегата и увеличение продолжительности рабочего периода.
Особенности и характеристики электродвигателя постоянного тока
Эксплуатационные характеристики электродвигателя постоянного тока позволяют широко использовать это устройство в самых разных сферах – от бытовых приборов до транспорта. К его преимуществам можно отнести:
- Экологичность. При работе не выделяются вредные вещества и отходы.
- Надежность. Благодаря довольно простой конструкции он редко ломается и служит долго.
- Универсальность. Он может использоваться в качестве как двигателя, так и генератора.
- Простота управления.
- Возможность регулирования частоты и скорости вращения вала – достаточно подключить агрегат в цепь переменного сопротивления.
- Легкость запуска.
- Небольшие размеры.
- Возможность менять направление вращения вала. В двигателе с последовательным возбуждением нужно изменить направление тока в обмотке возбуждения, во всех остальных типах – в якоре.

Как и любое устройство, электродвигатели постоянного тока имеют и «слабые стороны»:
- Их себестоимость, следовательно, и цена достаточно высока.
- Для подключения к сети необходим выпрямитель тока.
- Самая уязвимая и быстроизнашивающаяся деталь – щетки – требует периодической замены.
- При сильной перегрузке может случиться возгорание. Если соблюдать правила эксплуатации, такая возможность исключена.
Но, как видите, достоинства явно перевешивают, поэтому на данный момент электродвигатель является одним из наиболее экономичных и эффективных устройств. Зная устройство и принцип работы электродвигателя постоянного тока, вы сможете самостоятельно собрать и разобрать его для техосмотра, чистки или устранения неисправностей.
Принцип работы электродвигателя переменного тока, устройство электромотора.
Электрические двигатели – это силовые машины, применяющиеся для превращения электрической энергии в механическую. Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Для общей информации, рекомендуем прочитать нашу отдельную статью о принципах работы электродвигателей.
Содержание:
Электродвигатель переменного тока промышленного типа
Принцип преобразования энергии
Среди электрических двигателей, применяемых во всех отраслях промышленности и бытовых электроприборах, наибольшее распространение имеют двигатели переменного тока. Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Принцип работы всех электрических двигателей основывается на законе электромагнитной индукции Фарадея и законе Ампера. Первый из них описывает ситуацию, когда на замкнутом проводнике, находящемся в изменяющемся магнитном поле, генерируется электродвижущая сила. В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
Вращение ротора объясняется законом Ампера, который утверждает, что на электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действует сила, движущая их в плоскости, перпендикулярной силовым линиям этого поля. Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, а закрепляется он на валу, к которому подключаются рабочие механизмы оборудования.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам.
 Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.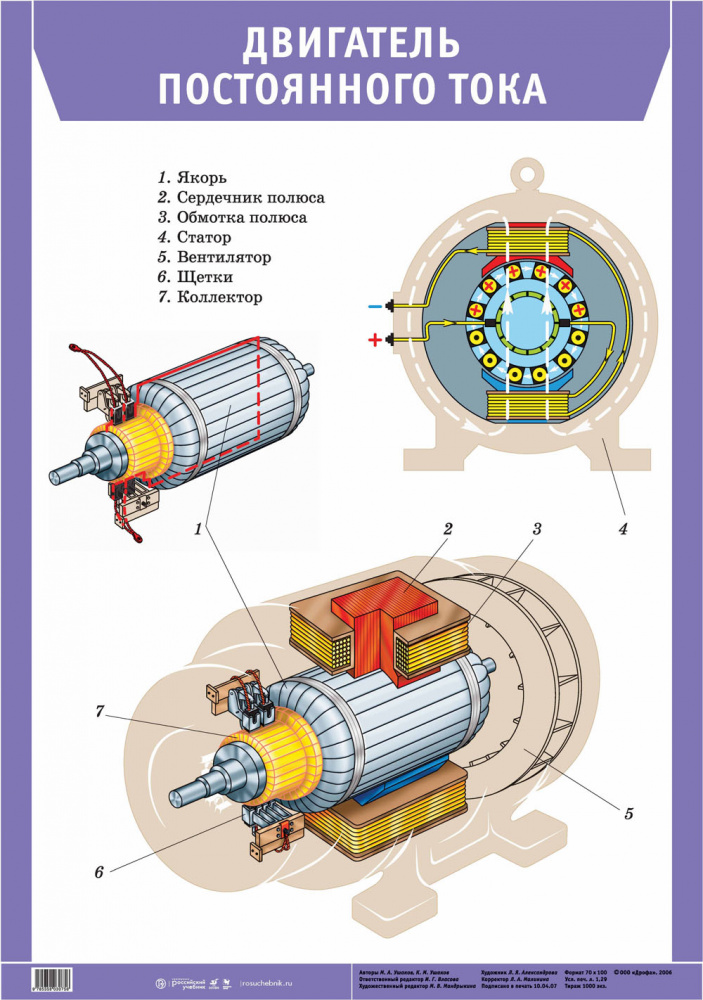
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.

Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
История изобретения
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят два зубчатых колеса из меди, расположенных на одной оси между постоянными магнитами. После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
Первый рабочий образец устройства, ставшего прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году. Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
А вот создание первого двигателя с асинхронным принципом работы принадлежит сразу двум ученым – Николе Тесла и Галилео Феррарис, по удачному стечению обстоятельств продемонстрировавшим свои изобретения в один год (1888). Через несколько лет двухфазный бесколлекторный двигатель переменного тока, созданный Николой Тесла уже использовался на нескольких электростанциях. В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
Система переменного тока, предложенная Вестингаузом
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным. В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Главным недостатком двигателей переменного тока с асинхронным принципом работы является тот факт, что регулировать их частоту вращения вала можно только изменяя входную частоту тока. Это не позволяет добиться постоянной скорости вращения, а также снижает мощность. Для асинхронных электродвигателей характерны высокие пусковые токи, но низкий пусковой момент. Для исправления этих недостатков применяется частотный привод, однако его цена противоречит одному из главных достоинств этих двигателей – низкой себестоимости.
Слабым местом синхронного двигателя является его сложная конструкция. Графитовые щетки довольно быстро выходят из строя под нагрузкой, а также теряют плотный контакт с коллектором из-за ослабления прижимной пружины. Кроме того, эти двигатели, как и асинхронные аналоги, не защищены от износа подшипников вала. К недостаткам также относится более сложный пуск, необходимость наличия источника постоянного тока и исключительно частотная регулировка частоты вращения.
Применение
На сегодняшний день электродвигатели со спецификацией на переменный ток распространены во всех сферах промышленности и жизнедеятельности. На электростанциях они устанавливаются в качестве генераторов, используются в производственном оборудовании, автомобилестроении и даже бытовой технике. Сегодня в каждом доме можно встретить как минимум одно устройство с электрическим двигателем переменного тока, например, стиральную машину. Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Среди асинхронных электрических машин наибольшее распространение получили устройства с трехфазной спецификацией. Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.
9 типичных неисправностей электродвигателя и способы их устранения
В этом обзоре мы рассмотрим типичные неисправности трехфазных асинхронных электродвигателей и способы их предупреждения и устранения.
Электрические неисправности электродвигателя
Электрические неисправности двигателя всегда связаны с обмоткой.
- Межвитковое замыкание может возникнуть при ухудшении изоляции в пределах одной обмотки. Возможные причины: перегрев обмотки, некачественная изоляция, износ изоляции вследствие вибрации.
 Определить межвитковое замыкание бывает сложно. Основной метод диагностики – сравнение сопротивления и рабочего тока всех трех обмоток. Первые симптомы межвиткового замыкания – повышенный нагрев двигателя и падение момента на валу. При этом по одной из фаз ток больше, чем по двум другим.
Определить межвитковое замыкание бывает сложно. Основной метод диагностики – сравнение сопротивления и рабочего тока всех трех обмоток. Первые симптомы межвиткового замыкания – повышенный нагрев двигателя и падение момента на валу. При этом по одной из фаз ток больше, чем по двум другим. - Замыкание между обмотками происходит из-за смещения обмоток, механической вибрации и ударов. При отсутствии должной электрической защиты может возникнуть короткое замыкание и пожар.
- Замыкание обмотки на корпус. При данной неисправности электродвигатель может продолжать работать, если неправильно выполнены заземление и защита от короткого замыкания. Однако в работе он будет смертельно опасен, так как его потенциал будет находиться под фазным напряжением.
- Обрыв обмотки. Эта неисправность равносильна пропаданию фазы. Если обрыв происходит в работе, то двигатель резко теряет мощность и начинает перегреваться. При правильно выполненной защите двигатель отключится, поскольку ток по другим фазам будет повышен.

Для устранения большинства из этих поломок требуется перемотка двигателя.
Механические неисправности электродвигателя
Механические неисправности электродвигателя связаны с его конструкцией.
- Износ и трение в подшипниках. Проявляется в повышении механической вибрации и шума при работе. В этом случае требуется замена подшипников, иначе неисправность приведет к перегреву и падению производительности двигателя.
- Проворачивание ротора на валу. Ротор может вращаться в магнитном поле статора, а вал будет неподвижен. Требуется механическая фиксация ротора на валу.
- Зацепление ротора за статор. Эта проблема связана с механической поломкой подшипников, их посадочных мест или корпуса двигателя. Кроме того, подобная неисправность приводит к повреждению обмотки статора. Практически не подлежит ремонту.
- Повреждение корпуса двигателя. Может происходить из-за ударов, повышенных нагрузок, неправильного крепления или низкого качества двигателя.
 Ремонт является трудоемким из-за трудностей соосной установки переднего и заднего подшипников.
Ремонт является трудоемким из-за трудностей соосной установки переднего и заднего подшипников. - Проворачивание или повреждение крыльчатки обдува. Несмотря на то, что двигатель продолжит работать, он будет перегреваться, что существенно сократит срок его службы. Крыльчатку необходимо закрепить (для этого используется шпонка или стопорное кольцо) или заменить.
Аварийные ситуации при работе электродвигателя
Существуют неисправности, не связанные непосредственно с двигателем, но влияющие на его работу, характеристики и срок службы. Большинство этих неисправностей вызваны механической перегрузкой, увеличением тока, и, как следствие, перегревом обмоток и корпуса.
- Увеличение нагрузки на валу вследствие заклинивания привода либо приводимых механизмов.
- Перекос напряжения питания, который может быть вызван проблемами питающей сети либо внутренними проблемами привода.
- Пропадание фазы, которое может произойти на любом участке питания двигателя – от питающей трансформаторной подстанции до обмотки двигателя.

- Проблема с обдувом (охлаждением). Может возникнуть из-за повреждения крыльчатки двигателя при собственном охлаждении, из-за останова вентилятора внешнего принудительного охлаждения или вследствие значительного повышения температуры окружающей среды.
Способы защиты электродвигателя
Для защиты электродвигателя от внутренних и внешних неисправностей, а также для минимизации дальнейших трудозатрат по его ремонту применяют различные устройства.
1. Мотор-автоматы и тепловые реле
Мотор-автоматы (автоматы защиты двигателя) и тепловые реле используют для обнаружения превышения тока по одной или всем фазам двигателя. В случае превышения через некоторое время происходит отключение привода.
В отличие от мотор-автомата, у теплового реле нет силовой коммутации. Оно имеет только управляющий контакт, который размыкает питание силовой цепи. Мотор-автомат является самостоятельным коммутационным устройством, способным выключать двигатель.
Минус теплового реле заключается в отсутствии защиты от короткого замыкания. Мотор-автомат имеет защиту от перегрузки и электромагнитную защиту от короткого замыкания, которая мгновенно срабатывает и выключает двигатель при превышении тока уставки в 10-20 раз.
Данные устройства используются наиболее широко и при правильной установке и настройке способны с большой долей вероятности защитить электродвигатель и оборудование от поломки и других негативных последствий.
2. Электронные реле защиты двигателей
Данный вид защиты обеспечивает большой выбор различных защит. Основным элементом таких реле является микропроцессор, который анализирует мгновенные значения напряжения и тока и принимает решения на основе заданных настроек. Это может быть выдача сигнала на индикацию либо на отключение двигателя.
3. Термисторы и термореле
Когда по какой-то причине не сработала тепловая защита по перегрузке, последний рубеж обороны — термозащита. Внутрь обмотки устанавливается термочувствительный элемент (как правило, термистор или позистор), который меняет свое сопротивление в зависимости от температуры. При пересечении порога срабатывает соответствующая защита, и двигатель отключается.
Внутрь обмотки устанавливается термочувствительный элемент (как правило, термистор или позистор), который меняет свое сопротивление в зависимости от температуры. При пересечении порога срабатывает соответствующая защита, и двигатель отключается.
Возможно применение более простых дискретных термореле (термоконтактов), которые размыкают контрольную или тепловую цепь, что приводит к аварийной остановке электродвигателя.
4. Преобразователи частоты
Обычно преобразователи частоты располагают несколькими видами защиты – по превышению момента и тока, по превышению напряжения, обрыву фазы и проч. Кроме того, возможно ограничение момента и тока. В этом случае на двигатель будет подаваться напряжение с меньшим уровнем и частотой, если будет обнаружена перегрузка. При этом будет выдано соответствующее сообщение оператору, а двигатель может продолжать работать.
Также производители частотных преобразователей рекомендуют устанавливать защитный автомат на входе ПЧ, тепловое реле на выходе и термисторную защиту.
Другие полезные материалы:
Выбор электродвигателя для компрессора
Как определить параметры двигателя без шильдика?
Выбор мотор-редуктора для буровой установки
Асинхронный электродвигатель постоянного тока 220В и 380В.
Электродвигатель – машина, преобразовывающая энергию электромагнитного поля во вращательное движение (электрический двигатель). Это, пожалуй, наиболее гениальное изобретение, позволившее человечеству сделать цивилизационный скачок в индустриальное общество. Коэффициент его полезного действия составляет 95-98 процентов.Основа принципа действия
В основе принципа действия любого электрического двигателя лежит феномен электромагнитной индукции. Если скрутить любой проводник в кольцо и через него протащить магнит, то в нем возникнет электрический ток, направление течения которого будет противоположно движению магнита. Верно и обратное: прохождение электричества через проводник вызывает индуцирование ЭДС в металлическом стержне.
Этот эффект был открыт в 1832 году английским физиком Майклом Фарадеем, создавшим прибор, состоящий из постоянного магнита и бронзового диска, помещенного между его полюсами. При вращении диска с подключенных к нему проводов снималось небольшое напряжение и переменный ток большой силы. Поэтому диск Фарадея называют еще и униполярным генератором, который при всей архаичности конструкции до сих пор используется. Например, в установках ТОКАМАК для разогрева плазмы и рельсотронах – разновидности оружия.
Электрический двигатель постоянного тока
Если к диску Фарадея подключить гальваническую батарею, то он совершит один оборот – до того момента, как совпадут разноименные полюса – ее и магнита. Электродвигатель постоянного тока в своей работе использует эффект отталкивания одноименных полюсов магнита. Чтобы вращение стало непрерывным, на его роторе закреплено особое устройство (коллектор) – кольцо из металла, поделенное на сектора диэлектриком.
Питающее напряжение подводится к коллектору посредством скользящих контактов – щеток. Когда вал машины поворачивается, сектора коллектора меняются местами и полюса остаются разноименными. Поэтому вращение продолжается. Скорость вращения ротора машин постоянного тока зависит от количества обмоток на нем. Каждая из них представляет собой своеобразный диск Фарадея и подключена к своей паре пластин коллектора.
Если ее мощность электрической машины невелика, то статорные магниты делают из природного металла с соответствующими свойствами. В промышленных машинах постоянного тока используются электромагниты – катушки из проводников. Они питаются тем же напряжением, что и катушки ротора.
Двигатели переменного тока
Конструкция электродвигателя переменного потом электроэнергии выглядит как бы вывернутой наизнанку по отношению к машинам постоянного тока. Питающее напряжение в нем подводится к статорным обмоткам, а принцип действия основан не на отталкивании одноименных полюсов магнита, а на притягивании имеющих противоположный знак.
Магнитное поле статора машины переменного тока вращается. Этот феномен возникает в результате сложения векторов магнитной индукции нескольких переменных токов, фазы синусоид которых сдвинуты друг относительно друга на некоторый угол – 900, если питание двухфазное, и 600 при трехфазном напряжении. Величины углов объясняются просто: отдельная обмотка генератора переменного тока состоит из двух катушек, а на статоре они расположены диаметрально противоположно. Если поделить 3600 на четыре (две обмотки) или на шесть (три обмотки), то получим исходные значения.
Магнитное поле ротора индуцируется энергией в статорных обмотках и имеет два свойства:
- Оно противоположно статорному по знаку.
- Отстает от статорного, поскольку на его индукцию требуется некоторое время, а сам ротор имеет физический вес и по этой причине обладает моментом инерции.
- Линейная скорость ротора ниже из-за разницы в размерах.
- Существуют потери энергии в воздушном зазоре между деталями машины.
Угол рассогласования между ротором и статором достигает 180, из-за его наличия электродвигатели переменного электричества называют асинхронными.
Наиболее распространенной конструкцией является электрическая машина, обмотка ротора которой состоит из нескольких проводников, замкнутых двумя металлическими кольцами. По форме она похожа на так называемое беличье колесо. Таковы все общепромышленные электродвигатели. Они просты, но имеют неустранимый недостаток: большие пусковые токи, которые приводят к перегрузкам в сети и авариям.
Двигатели с фазным ротором запускаются плавно, без перегрузок, но они сложны и дороги. Применяются для обеспечения больших тяговых усилий. Например, в крановом оборудовании или на электротранспорте.
Видео — как работает Электродвигатель:
Как правильно эксплуатировать электродвигатель
Асинхронный электродвигатель на сегодня является наиболее широко используемым двигателем в промышленности и строительстве. Чтобы устройство было всегда в форме и не пришлось его отправлять на свалку в результате преждевременного износа, хорошие хозяева проявляют заботу о нём и эксплуатируют правильно. В этой статье мы обсудим, как правильно эксплуатировать электродвигатель во избежание возникновения неполадок при его работе.
Условия работы электрического двигателя
Электрический двигатель будет в полной мере соответствовать характеристикам, указанным в паспорте, если его, прежде всего, правильно установить и использовать. Условия обеспечения номинальных параметров двигателем следующие:
— колебания напряжения питающей сети электрического тока, к которой подключен агрегат, не должны превышать 5% от номинала;
— максимально допустимая температура воздуха, окружающего конструкцию, должна быть не более +350 С;
— во избежание перегрузки мотора необходимо следить за показаниями амперметра, не допуская увеличения силы тока более 5% от номинала;
— корпус устройства надежно следует заземлить и регулярно проверять сопротивления заземления;
— конструктивные элементы, изготовленные из коррозируемых материалов, необходимо покрыть краской. Коррозия всегда начинается на поверхности металла, а затем распространяется вглубь, ухудшая механические свойства материала;
— кабельные сети, по которым поступает питающее напряжение, следует надёжно изолировать и защитить от случайных механических повреждений. Подключение выполнить напрямую к контактным зажимам двигателя, находящимся в коробке.
Элементарные правила эксплуатации в отношении своего двигателя
Правильная эксплуатация электродвигателя обеспечивает его надёжную работу в течение всего установленного ресурса. До включения устройства в работу обязательно проверить:
— чистоту и отсутствие ненужных предметов на корпусе и рядом;
— состояние заземления;
— качество крепления статора.
Первый запуск электродвигателя лучше доверить специалисту, который будет обслуживать все движущиеся механизмы.
Рекомендации по эксплуатации асинхронных электродвигателей:
-
У работающего двигателя основные электрические и механические показатели должны быть следующими:
— температура нагрева статора не более 900 С;
— вибрация в пределах нормы, а именно в соответствии с количеством оборотов двигателя;
— вращение ротора бесшумное, без скачков;
— установленная заводом-изготовителем величина нагрузки;
— отсутствие искрения щёток у коллекторных двигателей.
-
Защита электрических цепей осуществляется плавкими вставками. Значение тока по номиналу пишется на вставке.
-
Аварийное отключение электродвигателя производится в следующих случаях:
— появился сильный запах горения, дым, искры, огонь;
— повышенный уровень вибрации, из-за которого возможно разрушение двигателя;
— выход из строя электропривода;
— резкое снижение оборотов и повышенный нагрев.
Владелец также обязан планировать профилактические ремонты, которые повышают надёжность оборудования.
Некоторые двигатели используются крайне редко. Как поступать в этом случае? Рекомендуется постоянно осматривать, проверять сопротивление изоляции и запускать устройства, что позволит при необходимости без промедления их использовать.
Вывод
Конструкция асинхронного электродвигателя простая и надёжная. И, если соблюдать правила эксплуатации, в том числе не превышать основные электрические и механические параметры, установленные изготовителем, то срок его службы можно будет увеличить.
Электродвигатели Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Вт)
Электродвигатель — урок. Физика, 8 класс.
Рассмотрим техническое применение физических закономерностей (взаимосвязь магнитных и электрических явлений) на модели электродвигателя (рис. \(1\)).
Рис. \(1\)
Со стороны магнитного поля на вертикальные участки рамки будут действовать силы \(F\), направленные перпендикулярно току в рамке. Поскольку в вертикальных участках рамки ток имеет противоположное направление (в левой части рамки — вниз, а в правой — вверх), то и силы, действующие на вертикальные участки рамки, будут одинаковы по модулю, но противоположны по направлению (слева — вперёд, к наблюдателю, а справа — назад, от наблюдателя).
Действие равных по модулю, но противоположных по направлению сил на рамку приведёт к повороту рамки на \(180\)° против часовой стрелки, если смотреть на неё сверху.
Если каким-либо образом в этот момент изменить направление тока в рамке в другую сторону, то рамка сделает ещё пол-оборота против часовой стрелки. Таким образом, изменяя направление тока в рамке на противоположное каждые пол-оборота, можно заставить рамку вращаться в одну и ту же сторону.
Рассмотрим насаженную на вертикальную ось прямоугольную рамку \(ABCD\). Рамка представляет собой небольшое количество витков изолированного провода (рис. \(2\)). Концы провода соединяются с полукольцами \(2\).
Рис. \(2\)
Для соединения рамок с электрической цепью полукольца прижимаются к металлическим пластинам, которые называют щётками. Одна из щёток соединена с положительным полюсом источника, вторая соединена с отрицательным полюсом источника напряжения.
Так как за направление тока принимают движение от положительного полюса к отрицательному полюсу, то на участках проводника \(AB\) и \(CD\) токи противоположны по направлению. Поэтому силы, действующие на стороны рамки \(AB\) и \(CD\) направлены в противоположные стороны, что и вызывает поворот рамки (в данном случае по часовой стрелке). Так как к рамке присоединены полукольца, то и они тоже повернутся и образуют контакт уже с другой щёткой. При этом ток начнет протекать в другую сторону. Силы, возникающие при этом, будут продолжать вращать рамку в прежнем направлении (по часовой стрелке).
Вращение катушки с током в магнитном поле используется в устройстве электрического двигателя.
В технике применяют электродвигатели, обмотка которых содержится большое количество витков проволоки, которые размещаются в специальных прорезях железного цилиндра — ротора двигателя (рис. \(3\)). Иногда его называют якорем. Он служит для усиления магнитного поля, возникающего при протекании тока по виткам проволоки.
Рис. \(3\)
Магнитное поле, в котором вращается ротор двигателя, создаётся статором, который также является сильным электромагнитом. Питание электромагнита осуществляется от того же источника тока, что питает обмотку ротора. Внутри ротора проходит металлический вал — он по сути является осью вращения. Этот вал соединяется с механизмом, который нужно привести во вращение. И во время поворота якоря начинает вращаться весь механизм.
Электродвигатели постоянного тока чаще всего можно встретить в транспорте — троллейбусы, трамваи, метро) или в промышленности (подъёмные краны, станки металлопроката).
При работе с легковоспламеняющимися веществами, например, с бензином или нефтью, используются безыскровые электродвигатели. Такие двигатели ставят в насосах нефтяных скважин и бензоколонках.
Кроме электродвигателей постоянного тока используют электродвигатели переменного тока. Они есть в каждой квартире, как составная часть стиральной машины, холодильника, пылесоса.
Почему все большее и большее используют электродвигатели? Это связано с их размерами (они меньше, чем тепловые аналоги той же мощности), но самое главное преимущество связано с воздействием на окружающую среду. Электродвигатели не выделяют выхлопные газы и дым. Например, электромобиль (начиная с производства комплектующих частей) за срок службы оказывается в 5-7 раз экологичнее, чем его аналог с тепловым двигателем. Мощности электродвигателя позволяют достичь высоких КПД.
Условное обозначение электродвигателя на электрических схемах представлено на рисунке \(4\).
Рис. \(4\)
Борис Семёнович Якоби, русский учёный, считается одним из первых изобретателем электрических двигателей.
Отрицательным свойством любого двигателя является именно потеря энергии в виде рассеивания тепла, что приводит к перегреванию атмосферы при большом количестве двигателей.
какие они бывают / Блог компании НПФ ВЕКТОР / Хабр
В прошлых статьях был рассмотрен принцип работы синхронного и асинхронного электродвигателей, а также рассказано, как ими управлять. Но видов электродвигателей существует гораздо больше! И у каждого из них свои свойства, область применения и особенности.
В этой статье будет небольшой обзор по разным типам электродвигателей с фотографиями и примерами применений. Почему в пылесос ставятся одни двигатели, а в вентилятор вытяжки другие? Какие двигатели стоят в сегвее? А какие двигают поезд метро?
Каждый электродвигатель обладает некоторыми отличительными свойствами, которые обуславливают его область применения, в которой он наиболее выгоден. Синхронные, асинхронные, постоянного тока, коллекторные, бесколлекторные, вентильно-индукторные, шаговые… Почему бы, как в случае с двигателями внутреннего сгорания, не изобрести пару типов, довести их до совершенства и ставить их и только их во все применения? Давайте пройдемся по всем типам электродвигателей, а в конце обсудим, зачем же их столько и какой двигатель «самый лучший».
С этим двигателем все должны быть знакомы с детства, потому что именно этот тип двигателя стоит в большинстве старых игрушек. Батарейка, два проводка на контакты и звук знакомого жужжания, вдохновляющего на дальнейшие конструкторские подвиги. Все ведь так делали? Надеюсь. Иначе эта статья, скорее всего, не будет вам интересна. Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.
Двигатели постоянного тока бывают как очень маленького размера («вибра» в телефоне), так и довольно большого – обычно до мегаватта. Например, на фото ниже показан тяговый электродвигатель электровоза мощностью 810кВт и напряжением 1500В.
Почему ДПТ не делают мощнее? Главная проблема всех ДПТ, а в особенности ДПТ большой мощности – это коллекторный узел. Скользящий контакт сам по себе является не очень хорошей затеей, а скользящий контакт на киловольты и килоамперы – и подавно. Поэтому конструирование коллекторного узла для мощных ДПТ – целое искусство, а на мощности выше мегаватта сделать надежный коллектор становится слишком сложно (рекорд — 12,5МВт).
В потребительском качестве ДПТ хорош своей простотой с точки зрения управляемости. Его момент прямо пропорционален току якоря, а частота вращения (по крайней мере холостой ход) прямо пропорциональна приложенному напряжению. Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Также нужно упомянуть, как именно в ДПТ формируется магнитный поток возбуждения, с которым взаимодействует якорь (ротор) и за счет этого возникает вращающий момент. Этот поток может делаться двумя способами: постоянными магнитами и обмоткой возбуждения. В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже. Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
Как ни странно, это самый распространенный в быту электродвигатель, название которого наименее известно. Почему так получилось? Его конструкция и характеристики такие же, как у двигателя постоянного тока, поэтому упоминание о нем в учебниках по приводу обычно помещается в самый конец главы про ДПТ. При этом ассоциация коллектор = ДПТ так прочно заседает в голове, что не всем приходит на ум, что двигатель постоянного тока, в названии которого присутствует «постоянный ток», теоретически можно включать в сеть переменного тока. Давайте разберемся.
Как изменить направление вращения двигателя постоянного тока? Это знают все, надо сменить полярность питания якоря. А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
Этот тип двигателей наиболее широко распространен в бытовой технике, где требуется регулировать частоту вращения: дрели, стиральные машины (не с «прямым приводом»), пылесосы и т.п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
Еще более распространенным, чем коллекторные двигатели, является асинхронный двигатель. Только распространен он в основном в промышленности – где присутствует трехфазная сеть. Про принцип его работы написана
отдельная статья. Если кратко, то его статор – это распределенная двухфазная или трехфазная (реже многофазная) обмотка. Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор можно представлять себе в виде медного или алюминиевого цилиндра, внутри которого находится железо магнитопровода. К ротору в явном виде напряжение не подводится, но оно индуцируется там за счет переменного поля статора (поэтому двигатель на английском языке называют индукционным). Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.
Почему асинхронный двигатель так популярен? У него нет скользящего контакта, как у коллекторного двигателя, а поэтому он более надежен и требует меньше обслуживания. Кроме того, такой двигатель может пускаться от сети переменного тока «прямым пуском» – его можно включить коммутатором «на сеть», в результате чего двигатель запустится (с большим пусковым током 5-7 крат, но допустимым). ДПТ относительно большой мощности так включать нельзя, от пускового тока погорит коллектор. Также асинхронные привода, в отличие от ДПТ, можно делать гораздо большей мощности – десятки мегаватт, тоже благодаря отсутствию коллектора. При этом асинхронный двигатель относительно прост и дешев.
Асинхронный двигатель применяется и в быту: в тех устройствах, где не нужно регулировать частоту вращения. Чаще всего это так называемые «конденсаторные» двигатели, или, что тоже самое, «однофазные» асинхронники. Хотя на самом деле с точки зрения электродвигателя правильнее говорить «двухфазные», просто одна фаза двигателя подключается в сеть напрямую, а вторая через конденсатор. Конденсатор делает фазовый сдвиг напряжения во второй обмотке, что позволяет создать вращающееся эллиптическое магнитное поле. Обычно такие двигатели применяются в вытяжных вентиляторах, холодильниках, небольших насосах и т.п.
Минус асинхронного двигателя по сравнению с ДПТ в том, что его сложно регулировать. Асинхронный электродвигатель – это двигатель переменного тока. Если асинхронному двигателю просто понизить напряжение, не понизив частоту, то он несколько снизит скорость, да. Но у него увеличится так называемое скольжение (отставание частоты вращения от частоты поля статора), увеличатся потери в роторе, из-за чего он может перегреться и сгореть. Можно представлять это себе как регулирование скорости движения легкового автомобиля исключительно сцеплением, подав полный газ и включив четвертую передачу. Чтобы правильно регулировать частоту вращения асинхронного двигателя нужно пропорционально регулировать и частоту, и напряжение. А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.
Про принцип работы синхронного двигателя также
была отдельная статья. Синхронных приводов бывает несколько подвидов – с магнитами (PMSM) и без (с обмоткой возбуждения и контактными кольцами), с синусоидальной ЭДС или с трапецеидальной (бесколлекторные двигатели постоянного тока, BLDC). Сюда же можно отнести некоторые шаговые двигатели. До эры силовой полупроводниковой электроники уделом синхронных машин было применение в качестве генераторов (почти все генераторы всех электростанций – синхронные машины), а также в качестве мощных приводов для какой-либо серьезной нагрузки в промышленности.
Все эти машины выполнялись с контактными кольцами (можно увидеть на фото), о возбуждении от постоянных магнитов при таких мощностях речи, конечно же, не идет. При этом у синхронного двигателя, в отличие от асинхронного, большие проблемы с пуском. Если включить мощную синхронную машину напрямую на трехфазную сеть, то всё будет плохо. Так как машина синхронная, она должна вращаться строго с частотой сети. Но за время 1/50 секунды ротор, конечно же, разогнаться с нуля до частоты сети не успеет, а поэтому он будет просто дергаться туда-сюда, так как момент получится знакопеременный. Это называется «синхронный двигатель не вошел в синхронизм». Поэтому в реальных синхронных машинах применяют асинхронный пуск – делают внутри синхронной машины небольшую асинхронную пусковую обмотку и закорачивают обмотку возбуждения, имитируя «беличью клетку» асинхронника, чтобы разогнать машину до частоты, примерно равной частоте вращения поля, а уже после этого включается возбуждение постоянным током и машина втягивается в синхронизм.
И если у асинхронного двигателя регулировать частоту ротора без изменения частоты поля хоть как-то можно, то у синхронного двигателя нельзя никак. Он или крутится с частой поля, или выпадает из синхронизма и с отвратительными переходными процессами останавливается. Кроме того, у синхронного двигателя без магнитов есть контактные кольца – скользящий контакт, чтобы передавать энергию на обмотку возбуждения в роторе. С точки зрения сложности, это, конечно, не коллектор ДПТ, но всё равно лучше бы было без скользящего контакта. Именно поэтому в промышленности для нерегулируемой нагрузки применяют в основном менее капризные асинхронные привода.
Но все изменилось с появлением силовой полупроводниковой электроники и микроконтроллеров. Они позволили сформировать для синхронной машины любую нужную частоту поля, привязанную через датчик положения к ротору двигателя: организовать вентильный режим работы двигателя (автокоммутацию) или векторное управление. При этом характеристики привода целиком (синхронная машина + инвертор) получились такими, какими они получаются у двигателя постоянного тока: синхронные двигатели заиграли совсем другими красками. Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
У него много названий. Обычно его коротко называют вентильно-индукторный двигатель (ВИД) или вентильно-индукторная машина (ВИМ) или привод (ВИП). В английской терминологии это switched reluctance drive (SRD) или motor (SRM), что переводится как машина с переключаемым магнитным сопротивлением. Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы на кафедре электропривода в МЭИ, а также на фирме ООО «НПФ ВЕКТОР» называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).
Конструктивно это самый простой двигатель и по принципу действия похож на некоторые шаговые двигатели. Ротор – зубчатая железка. Статор – тоже зубчатый, но с другим числом зубцов. Проще всего принцип работы поясняет вот эта анимация:
Подавая постоянный ток в фазы в соответствии с текущим положением ротора можно заставить двигатель вращаться. Фаз может быть разное количество. Форма тока реального привода для трех фаз показа на рисунке (токоограничение 600А):
Однако за простоту двигателя приходится платить. Так как двигатель питается однополярными импульсами тока, напрямую «на сеть» его включать нельзя. Обязательно требуется преобразователь и датчик положения ротора. Причем преобразователь не классический (типа шестиключевой инвертор): для каждой фазы у преобразователя для SRD должны быть полумосты, как на фото в начале этого раздела. Проблема в том, что для удешевления комплектующих и улучшения компоновки преобразователей силовые ключи и диоды часто не изготавливаются отдельно: обычно применяются готовые модули, содержащие одновременно два ключа и два диода – так называемые стойки. И именно их чаще всего и приходится ставить в преобразователь для ВИД СВ, половину силовых ключей просто оставляя незадействованной: получается избыточный преобразователь. Хотя в последние годы некоторые производители IGBT модулей выпустили изделия, предназначенные именно для SRD.
Следующая проблема – это пульсации вращающего момента. В силу зубчатой структуры и импульсного тока момент редко получается стабильным – чаще всего он пульсирует. Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Однако даже при этих недостатках двигатели остаются перспективными в качестве регулируемого привода. Благодаря их простоте сам двигатель получается дешевле классического асинхронного двигателя. Кроме того, двигатель легко сделать многофазным и многосекционным, разделив управление одним двигателем на несколько независимых преобразователей, которые работают параллельно. Это позволяет повысить надежность привода – отключение, скажем, одного из четырех преобразователей не приведет к остановке привода в целом – трое соседей будут какое-то время работать с небольшой перегрузкой. Для асинхронного двигателя такой фокус выполнить так просто не получается, так как невозможно сделать несвязанные друг с другом фазы статора, которые бы управлялись отдельным преобразователем полностью независимо от других. Кроме того, ВИД очень хорошо регулируются «вверх» от основной частоты. Железку ротора можно раскручивать без проблем до очень высоких частот.
Мы на фирме ООО «НПФ ВЕКТОР» выполнили несколько проектов на базе этого двигателя. Например, делали небольшой привод для насосов горячего водоснабжения, а также недавно закончили разработку и отладку системы управления для мощных (1,6 МВт) многофазных резервируемых приводов для обогатительных фабрик АК «АЛРОСА». Вот машинка на 1,25 МВт:
Вся система управления, контроллеры и алгоритмы были сделаны у нас в ООО «НПФ ВЕКТОР», силовые преобразователи спроектировала и изготовила фирма ООО «НПП «ЦИКЛ+». Заказчиком работы и проектировщиком самих двигателей являлась фирма ООО «МИП «Мехатроника» ЮРГТУ (НПИ)».
Это совсем другой тип двигателя, отличающийся по принципу действия от обычного ВИД. Исторически известны и широко используются вентильно-индукторные генераторы такого типа, применяемые на самолетах, кораблях, железнодорожном транспорте, а вот именно двигателями такого типа почему-то занимаются мало.
На рисунке схематично показана геометрия ротора и магнитный поток обмотки возбуждения, а также изображено взаимодействие магнитных потоков статора и ротора, при этом ротор на рисунке установлен в согласованное положение (момент равен нулю).
Ротор собран из двух пакетов (из двух половинок), между которыми установлена обмотка возбуждения (на рисунке показана как четыре витка медного провода). Несмотря на то, что обмотка висит «посередине» между половинками ротора, крепится она к статору и не вращается. Ротор и статор выполнены из шихтованного железа, постоянные магниты отсутствуют. Обмотка статора распределенная трехфазная – как у обычного асинхронного или синхронного двигателя. Хотя существуют варианты такого типа машин с сосредоточенной обмоткой: зубцами на статоре, как у SRD или BLDC двигателя. Витки обмотки статора охватывают сразу оба пакета ротора.
Упрощенно принцип работы можно описать следующим образом: ротор стремится повернуться в такое положение, при котором направления магнитного потока в статоре (от токов статора) и роторе (от тока возбуждения) совпадут. При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).
С точки зрения управления ВИД НВ оказывается эквивалентен синхронной машине с контактными кольцами. То есть, если вы не знаете конструкцию этой машины и используете её как «черный ящик», то она ведет себя практически неотличимо от синхронной машины с обмоткой возбуждения. Можно сделать векторное управление или автокоммутацию, можно ослаблять поток возбуждения для повышения частоты вращения, можно усиливать его для создания большего момента – всё так, как будто это классическая синхронная машина с регулируемым возбуждением. Только ВИД НВ не имеет скользящего контакта. И не имеет магнитов. И ротор в виде дешевой железной болванки. И момент не пульсирует, в отличие от SRD. Вот, например, синусоидальные токи ВИД НВ при работе векторного управления:
Кроме того, ВИД НВ можно создавать многофазным и многосекционным, аналогично тому, как это делается в ВИД СВ. При этом фазы оказываются несвязанными друг с другом магнитными потоками и могут работать независимо. Т.е. получается как будто бы несколько трехфазных машин в одной, к каждой из которых присоединяется свой независимый инвертор с векторным управлением, а результирующая мощность просто суммируется. Координации между преобразователями при этом не требуется никакой – только общее задание частоты вращения.
Минусы этого двигателя тоже есть: напрямую от сети он крутиться не может, так как, в отличие от классических синхронных машин, ВИД НВ не имеет асинхронной пусковой обмотки на роторе. Кроме того, он сложнее по конструкции, чем обычный ВИД СВ (SRD).
На основе данного двигателя мы также сделали несколько успешных проектов. Например, один из них – это серия приводов насосов и вентиляторов для районных теплостанций г. Москвы мощностью 315-1200кВт (ссылка на проект). Это низковольтные (380В) ВИД НВ с резервированием, где одна машина «разбита» на 2, 4 или 6 независимых трехфазных секций. На каждую секцию ставится свой однотипный преобразователь с векторным бездатчиковым управлением. Таким образом можно легко наращивать мощность на базе однотипной конструкции преобразователя и двигателя. При этом часть преобразователей подключено к одному вводу питания районной теплостанции, а часть к другому. Поэтому если происходит «моргушка питания» по одному из вводов питания, то привод не встает: половина секций кратковременно работают в перегрузке, пока питание не восстановится. Как только оно восстанавливается, на ходу в работу автоматически вводятся отдыхавшие секции. Вообще, наверное, этот проект заслуживал бы отдельной статьи, поэтому пока про него закончу, вставив фото двигателя и преобразователей:
К сожалению, двумя словами здесь не обойтись. И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.
Давайте рассмотрим регулируемый электропривод, режим работы которого – длительный. Коллекторные машины здесь сразу исключаются из конкуренции по причине ненадежности коллекторного узла. Но остались еще четыре – синхронный, асинхронный, и два типа вентильно-индукторных. Если мы говорим о приводе насоса, вентилятора и чего-то похожего, что используется в промышленности и где масса и габариты особо не важны, то здесь из конкуренции выпадают синхронные машины. Для обмотки возбуждения требуются контактные кольца, что является капризным элементом, а постоянные магниты очень дороги. Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Как показывает опыт, все три типа машин успешно применяются. Но – асинхронный привод невозможно (или очень сложно) секционировать, т.е. разбить мощную машину на несколько маломощных. Поэтому для обеспечения большой мощности асинхронного преобразователя требуется делать его высоковольтным: ведь мощность – это, если грубо, произведение напряжения на ток. Если для секционируемого привода мы можем взять низковольтный преобразователь и наставить их несколько, каждый на небольшой ток, то для асинхронного привода преобразователь должен быть один. Но не делать же преобразователь на 500В и ток 3 килоампера? Это провода нужны с руку толщиной. Поэтому для увеличения мощности повышают напряжение и снижают ток. А высоковольтный преобразователь – это совсем другой класс задачи. Нельзя просто так взять силовые ключи на 10кВ и сделать из них классический инвертор на 6 ключей, как раньше: и нет таких ключей, а если есть, они очень дороги. Инвертор делают многоуровневым, на низковольтных ключах, соединенных последовательно в сложных комбинациях. Такой инвертор иногда тянет за собой специализированный трансформатор, оптические каналы управления ключами, сложную распределенную систему управления, работающую как одно целое… В общем, сложно всё у мощного асинхронного привода. При этом вентильно-индукторный привод за счет секционирования может «отсрочить» переход на высоковольтный инвертор, позволяя сделать привода до единиц мегаватт от низковольтного питания, выполненные по классической схеме. В этом плане ВИПы становятся интереснее асинхронного привода, да еще и обеспечивают резервирование. С другой стороны, асинхронные привода работают уже сотни лет, двигатели доказали свою надежность. ВИПы же только пробивают себе дорогу. Так что здесь надо взвесить много факторов, чтобы выбрать для конкретной задачи наиболее оптимальный привод.
Но всё становится еще интереснее, когда речь заходит о транспорте или о малогабаритных устройствах. Там уже нельзя беспечно относиться к массе и габаритам электропривода. И вот там уже нужно смотреть на синхронные машины с постоянными магнитами. Если посмотреть только на параметр мощности деленной на массу (или размер), то синхронные машины с постоянными магнитами вне конкуренции. Отдельные экземпляры могут быть в разы меньше и легче, чем любой другой «безмагнитный» привод переменного тока. Но здесь есть одно опасное заблуждение, которое я сейчас постараюсь развеять.
Если синхронная машина в три раза меньше и легче – это не значит, что для электротяги она подходит лучше. Всё дело в отсутствии регулировки потока постоянных магнитов. Поток магнитов определяет ЭДС машины. На определенной частоте вращения ЭДС машины достигает напряжения питания инвертора и дальнейшее повышение частоты вращения становится затруднительно. Тоже самое касается и повышения момента. Если нужно реализовать больший момент, в синхронной машине нужно повышать ток статора – момент возрастет пропорционально. Но более эффективно было бы повысить и поток возбуждения – тогда и магнитное насыщение железа было бы более гармоничным, а потери были бы ниже. Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):
На рисунке по горизонтальной оси отложен момент двигателя, по вертикальной – частота вращения. Звездочкой отмечена точка номинального режима, например, пусть это будет 60кВт. Заштрихованный прямоугольник – это диапазон, где возможно регулирование синхронной машины без проблем – т.е. «вниз» по моменту и «вниз» по частоте от номинала. Красной линией отмечено, что можно выжать из синхронной машины сверх номинала – небольшое повышение частоты вращения за счет так называемого ослабления поля (на самом деле это создание лишнего реактивного тока по оси d двигателя в векторном управлении), а также показана некоторая возможная форсировка по моменту, чтобы было безопасно для магнитов. Всё. А теперь давайте поставим эту машину в легковое транспортное средство без коробки передач, где батарея рассчитана на отдачу 60кВт. Желаемая тяговая характеристика изображена синим. Т.е. начиная с самой низкой скорости, скажем, с 10км/ч привод должен развивать свои 60кВт и продолжать их развивать вплоть до максимальной скорости, скажем 150км/ч. Синхронная машина и близко не лежала: её момента не хватит даже чтобы заехать на бордюр у подъезда (или на поребрик у парадной, для полит. корректности), а разогнаться машина сможет лишь до 50-60км/ч.
Что же это значит? Синхронная машина не подходит для электротяги без коробки передач? Подходит, конечно же, просто надо по-другому её выбрать. Вот так:
Надо выбрать такую синхронную машину, чтобы требуемый тяговый диапазон регулирования был весь внутри её механической характеристики. Т.е. чтобы машина одновременно могла развить и большой момент, и работать на большой частоте вращения. Как вы видите из рисунка… установленная мощность такой машины будет уже не 60кВт, а 540кВт (можно посчитать по делениям). Т.е. в электромобиль с батареей на 60кВт придется установить синхронную машину и инвертор на 540кВт, просто чтобы «пройти» по требуемому моменту и частоте вращения.
Конечно же, так как описано, никто не делает. Никто не ставит машину на 540кВт вместо 60кВт. Синхронную машину модернизируют, пытаясь «размазать» её механическую характеристику из оптимума в одной точке вверх по скорости и вниз по моменту. Например, прячут магниты в железо ротора (делают инкорпорированными), это позволяет не бояться размагнитить магниты и ослаблять поле смелее, а также перегружать по току побольше. Но от таких модификаций синхронная машина набирает вес, габариты и становится уже не такой легкой и красивой, какой она была раньше. Появляются новые проблемы, такие как «что делать, если в режиме ослабления поля инвертор отключился». ЭДС машины может «накачать» звено постоянного тока инвертора и выжечь всё. Или что делать, если инвертор на ходу пробился — синхронная машина замкнется и может токами короткого замыкания убить и себя, и водителя, и всю оставшуюся живой электронику — нужны схемы защиты и т.п.
Поэтому синхронная машина хороша там, где большого диапазона регулирования не требуется. Например, в сегвее, где скорость с точки зрения безопасности может быть ограничена на 30км/ч (или сколько там у него?). А еще синхронная машина идеальна для вентиляторов: у вентилятора сравнительно мало изменяется частота вращения, от силы раза в два – больше особо нет смысла, так как воздушный поток ослабевает пропорционально квадрату скорости (примерно). Поэтому для небольших пропеллеров и вентиляторов синхронная машина – это то, что нужно. И как раз она туда, собственно, успешно ставится.
Тяговую кривую, изображенную на рисунке синим цветом, испокон веков реализуют двигатели постоянного тока с регулируемым возбуждением: когда ток обмотки возбуждения изменяют в зависимости от тока статора и частоты вращения. При увеличении частоты вращения уменьшается и ток возбуждения, позволяя машине разгоняться выше и выше. Поэтому ДПТ с независимым (или смешанным) управлением возбуждением классически стоял и до сих пор стоит в большинстве тяговых применений (метро, трамваи и т.п.). Какая же электрическая машина переменного тока может с ним поспорить?
К такой характеристике (постоянства мощности) могут лучше приблизиться двигатели, у которых регулируется возбуждение. Это асинхронный двигатель и оба типа ВИПов. Но у асинхронного двигателя есть две проблемы: во-первых, его естественная механическая характеристика – это не кривая постоянства мощности. Потому что возбуждение асинхронного двигателя осуществляется через статор. А поэтому в зоне ослабления поля при постоянстве напряжения (когда на инверторе оно закончилось) подъем частоты в два раза приводит к падению тока возбуждения в два раза и моментоообразующего тока тоже в два раза. А так как момент на двигателе – это произведение тока на поток, то момент падает в 4 раза, а мощность, соответственно, в два. Вторая проблема – это потери в роторе при перегрузке с большим моментом. В асинхронном двигателе половина потерь выделяется в роторе, половина в статоре. Для уменьшения массогабаритных показателей на транспорте часто применяется жидкостное охлаждение. Но водяная рубашка эффективно охладит лишь статор, за счет явления теплопроводности. От вращающегося ротора тепло отвести значительно сложнее – путь отвода тепла через «теплопроводность» отрезан, ротор не касается статора (подшипники не в счет). Остается воздушное охлаждение путем перемешивая воздуха внутри пространства двигателя или излучение тепла ротором. Поэтому ротор асинхронного двигателя получается своеобразным «термосом» — единожды перегрузив его (сделав динамичный разгон на машине), требуется долгое время ждать остывания ротора. А ведь его температуру еще и не измерить… приходится только предсказывать по модели.
Здесь нужно отметить, как мастерски обе проблемы асинхронного двигателя обошли в Тесла в своей Model S. Проблему с отводом тепла из ротора они решили… заведя во вращающийся ротор жидкость (у них есть соответствующий патент, где вал ротора полый и он омывается внутри жидкостью, но достоверно я не знаю, применяют ли они это). А вторую проблему с резким уменьшением момента при ослаблении поля… они не решали. Они поставили двигатель с тяговой характеристикой, почти как у меня нарисована для «избыточного» синхронного двигателя на рисунке выше, только у них не 540кВт, а 300кВт. Зона ослабления поля в тесле очень маленькая, где-то два крата. Т.е. они поставили «избыточный» для легкового автомобиля двигатель, сделав вместо бюджетного седана по сути спорт-кар с огромной мощностью. Недостаток асинхронного двигателя обратили в достоинство. Но если бы они попытались сделать менее «производительный» седан, мощностью 100кВт или меньше, то асинхронный двигатель, скорее всего, был бы точно таким же (на 300кВт), просто его искусственно задушили электроникой бы под возможности батареи.
А теперь ВИПы. Что могут они? Какая тяговая характеристика у них? Про ВИД СВ я точно сказать не могу – это по своему принципу работы нелинейный двигатель, и от проекта к проекту его механическая характеристика может сильно меняться. Но в целом он скорее всего лучше асинхронного двигателя в плане приближения к желаемой тяговой характеристике с постоянством мощности. А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
Так что же? ВИД НВ – идеальная машина для тяги без единой проблемы? На самом деле нет. Проблем у него тоже куча. Например, его обмотка возбуждения, которая «висит» между пакетами статора. Хоть она и не вращается, от неё тоже сложно отводить тепло – получается ситуация почти как ротором асинхронника, лишь немного получше. Можно, в случае надобности, «кинуть» трубку охлаждения со статора. Вторая проблема – это завышенные массогабаритные показатели. Глядя на рисунок ротора ВИД НВ, можно видеть, что пространство внутри двигателя используется не очень эффективно – «работают» только начало и конец ротора, а середина занята обмоткой возбуждения. В асинхронном двигателе, например, вся длина ротора, всё железо «работает». Сложность сборки – засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь (ротор делается разборным, соответственно, есть проблемы с балансировкой). Ну и просто массогабаритные характеристики пока получаются не очень-то выдающимися по сравнению с теми же асинхронными двигателями Тесла, если накладывать тяговые характеристики друг на друга.
А также есть еще общая проблема обоих типов ВИД. Их ротор – пароходное колесо. И на высоких частотах вращения (а высокая частота нужна, так высокочастотные машины при той же мощности меньше тихоходных) потери от перемешивания воздуха внутри становятся очень значительными. Если до 5000-7000 об/мин ВИД еще можно сделать, то на 20000 об/мин это получится большой миксер. А вот асинхронный двигатель на такие частоты и гораздо выше сделать вполне можно за счет гладкого статора.
Так что же лучше всего в итоге для электротяги? Какой двигатель самый лучший?
Понятия не имею. Все плохие. Надо изобретать дальше. Но мораль статьи такова – если вы хотите сравнить между собой разные типы регулируемого электропривода, то нужно сравнивать на конкретной задаче с конкретной требуемой механической характеристикой по всем-всем параметрам, а не просто по мощности. Также в этой статье не рассмотрены еще куча нюансов сравнения. Например, такой параметр как длительность работы в каждой из точек механической характеристики. На максимальном моменте обычно ни одна машина не может работать долго – это режим перегрузки, а на максимальной скорости очень плохо себя чувствуют синхронные машины с магнитами – там у них огромные потери в стали. А еще интересный параметр для электротяги – потери при движении выбегом, когда водитель отпустил газ. Если ВИПы и асинхронные двигатели будут крутиться как болванки, то у синхронной машины с постоянными магнитами останутся почти номинальные потери в стали из-за магнитов. И так далее, и так далее…
Поэтому нельзя вот так просто взять и выбрать лучший электропривод.
UPD:
Обобщая замечания в комментариях, необходимо дополнить некоторые важные, как оказалось, вещи, которые я изначально опустил как маловажные.
1. Асинхронные двигатели до эры преобразователей частоты регулировали за счет применения так называемого фазного ротора — когда ротор делался в виде обмотки, а не беличьей клетки, а через контактные кольца (как у синхронной машины) фазы ротора выводились наружу. Включая в цепь ротора резисторы можно было мягко пускать АД и безопасно регулировать частоту вращения, изменяя сопротивление. Проблема в том, что очень много энергии при этом терялось в резисторах — иногда до половины от подводимой к приводу мощности.
2. В статье не упомянуты синхронные реактивные машины и их совмещение с синхронными машинами с постоянными магнитами. Если сделать ротор синхронной машины с магнитами явнополюсным — например таким, как нарисован ротор SRD двигателя на gif анимации, то развиваемый момент может быть не только активным, но и реактивным — как у SRD. Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
3. Шаговые двигатели не рассмотрены, потому что по принципу действия они в первом приближении схожи либо с синхронными машинами с постоянными магнитами, либо с SRD двигателями — зависит от конкретного типа шаговика. Только шаговые двигатели, в отличие от «силовых» приводов, имеют гораздо большее количество пар полюсов (зубцов) для увеличения коэффициента электрической редукции: чтобы одному периоду тока соответствовало меньшее угловое перемещение вала. Управление шаговиками обычно тривиальное — последовательный перебор фаз друг за другом (шаги). Более продвинутые системы дробят шаг, подавая в двигатель «микрошаги» — по сути приближая управление к синусоидальному. Еще более продвинутые используют датчик положения ротора и применяют полноценное векторное управление. Но в таком случае и машину нужно делать более качественную, а называться в сумме это будет уже настоящим сервоприводом.
Асинхронные двигатели переменного тока| Как работают электродвигатели переменного тока Асинхронные электродвигатели переменного тока
| Как работают двигатели переменного тока — объясните это Рекламное объявлениеКриса Вудфорда. Последнее изменение: 28 июня 2021 г.
Вы знаете, как работают электродвигатели? Ответ, наверное, да и нет! Хотя многие из нас узнали, как базовые моторные работы, из простых научных книг и веб-страниц, таких как эта, многие из моторы, которые мы используем каждый день — от заводских машин до электропоезда — вообще-то так не работают.Какие книги рассказывают нам о простых двигателях постоянного тока (DC), которые имеют петля из проволоки, вращающаяся между полюсами постоянного магнита; в реальной жизни, в большинстве двигателей большой мощности используется переменный ток (AC) и работают совершенно по-другому: это то, что мы называем индукцией двигатели, и они очень изобретательно используют вращающееся магнитное поле. Давайте посмотрим внимательнее!
Фотография: Обычный асинхронный двигатель переменного тока со снятыми корпусом и ротором, на котором показаны медные обмотки катушек, составляющих статор (статическая, неподвижная часть двигателя).Эти катушки предназначены для создания вращающегося магнитного поля, которое вращает ротор (подвижную часть двигателя) в пространстве между ними. Фото Дэвида Парсонса любезно предоставлено Министерством энергетики США / NREL.
Как работает обычный двигатель постоянного тока?
Простые двигатели, которые вы видите в научных книгах, основаны на кусок проволоки, согнутый в прямоугольную петлю, которая подвешена между полюса магнита. (Физики назвали бы это проводник с током сидит в магнитном поле.) Когда вы подключаете такой провод к батарее, через него течет постоянный ток (DC), создавая вокруг него временное магнитное поле. Это временное поле отталкивает исходное поле от постоянного магнита, в результате чего провод перевернуть. Обычно провод останавливался в этой точке, а затем снова переворачивался, но если мы воспользуемся оригинальным вращающимся соединением называется коммутатором, мы можем сделать обратный ток каждый раз, когда проволока переворачивается, а это значит, что проволока будет продолжать вращаться в в том же направлении, пока течет ток.Это суть простого электродвигателя постоянного тока, задуманного в 1820-е годы Майкла Фарадея и превратился в практическое изобретение о десять лет спустя Уильям Стерджен. (Более подробную информацию вы найдете в нашей вводной статье об электродвигателях.)
Изображение: Электродвигатель постоянного тока основан на проволочной петле, вращающейся внутри фиксированного магнитного поля, создаваемого постоянным магнитом. Коммутатор (разрезное кольцо) и щетки (угольные контакты к коммутатору) меняют направление электрического тока каждый раз, когда провод перекручивается, что позволяет ему вращаться в одном и том же направлении.
Прежде чем перейти к двигателям переменного тока, давайте быстро резюмируйте, что здесь происходит. В двигателе постоянного тока магнит (и его магнитное поле) фиксируется на месте и образует внешнюю статическую часть двигатель (статор), а катушка с проводом, несущая электрический ток формирует вращающуюся часть двигателя (ротор). Магнитное поле исходит от статора, который представляет собой постоянного магнита, пока вы подаете электроэнергию на катушку, которая составляет ротор. Взаимодействие между постоянными магнитами поле статора и временное магнитное поле, создаваемое ротором, равно что заставляет мотор крутиться.
Рекламные ссылкиКак работает двигатель переменного тока?
В отличие от игрушек и фонариков, большинство домов, офисов, фабрики и другие здания не питаются от маленьких батареек: на них подается не постоянный ток, а переменный ток (AC), который меняет направление примерно 50 раз в секунду. (с частотой 50 Гц). Если вы хотите запустить двигатель от домашней электросети переменного тока, вместо батареи постоянного тока вам нужна другая конструкция двигателя.
В двигателе переменного тока есть кольцо электромагнитов расположены снаружи (составляя статор), которые предназначены для создания вращающегося магнитного поля.Внутри статора находится цельная металлическая ось, проволочная петля, катушка, беличья клетка из металлических стержней и межсоединений (например, вращающиеся клетки, которым иногда удается развлечь мышей), или другую свободно вращающуюся металлическую деталь, которая может проводить электричество. В отличие от двигателя постоянного тока, где вы посылаете энергию во внутренний ротор, в двигателе переменного тока вы посылаете энергию на внешние катушки, которые составляют статор. Катушки запитываются попарно, последовательно, создает магнитное поле, вращающееся вокруг двигателя.
Фото: Статор создает магнитное поле с помощью туго намотанных катушек из медной проволоки, которые известны как обмотки. Когда электродвигатель изнашивается или перегорает, можно заменить его другим электродвигателем. Иногда легче заменить обмотки двигателя новым проводом — это умелая работа, называемая перемоткой, что и происходит здесь. Фото Сета Скарлетта любезно предоставлено ВМС США.
Как это вращающееся поле заставляет двигатель двигаться? Помните, что ротор, подвешенный внутри магнитное поле, является электрическим проводником.Магнитное поле постоянно меняется (потому что оно вращается), поэтому согласно законам электромагнетизма (если быть точным, закону Фарадея) магнитное поле производит (или индуцирует, если использовать термин Фарадея) электрический ток внутри ротора. Если проводник представляет собой кольцо или провод, ток течет вокруг него по петле. Если проводник представляет собой просто цельный кусок металла, вместо этого вокруг него циркулируют вихревые токи. В любом случае индуцированный ток производит собственное магнитное поле и, согласно другому закону электромагнетизма (Закон Ленца) пытается остановить то, что его вызывает — вращающееся магнитное поле — также вращаясь.(Вы можете думать о роторе отчаянно пытается «догнать» вращающееся магнитное поле, пытаясь устранить разница в движении между ними.) Электромагнитная индукция — это ключ к тому, почему такой двигатель вращается, и поэтому он называется асинхронным.
Фотография: эффективный асинхронный двигатель переменного тока. Фото Аль-Пуэнте любезно предоставлено NREL.
Как работает асинхронный двигатель переменного тока?
Вот небольшая анимация, чтобы подвести итог и, надеюсь, прояснить все:
- Две пары катушек электромагнита, показанные здесь красным и синим цветом, поочередно запитываются источником переменного тока (не показан, но подаются к выводам справа).Две красные катушки соединены последовательно и запитаны вместе, а две синие катушки катушки подключаются таким же образом. Поскольку это переменный ток, ток в каждой катушке не включается и не выключается внезапно (как предполагает эта анимация), а плавно повышается и падает в форме синусоидальной волны: когда красные катушки наиболее активны, синие катушки полностью неактивны, и наоборот. Другими словами, их токи не совпадают (не совпадают по фазе на 90 °).
- Когда катушки находятся под напряжением, магнитное поле, которое они создают между ними, индуцирует электрический ток в роторе.Этот ток создает собственное магнитное поле, которое пытается противодействовать тому, что его вызвало (магнитное поле от внешних катушек). Взаимодействие между двумя полями заставляет ротор вращаться.
- Когда магнитное поле чередуется между красной и синей катушками, оно эффективно вращается вокруг двигателя. Вращающееся магнитное поле заставляет ротор вращаться в одном направлении и (теоретически) почти с одинаковой скоростью.
Асинхронные двигатели на практике
Что контролирует скорость двигателя переменного тока?
Фотография: Двигатель с регулируемой частотой.Фото Уоррена Гретца любезно предоставлено NREL.
В синхронных двигателях переменного тока ротор вращается с той же скоростью, что и вращающееся магнитное поле; в асинхронном двигателе ротор всегда вращается с меньшей скоростью, чем поле, что делает его примером так называемого асинхронного двигателя переменного тока. Теоретическая скорость ротора в асинхронном двигателе зависит от частоты источника переменного тока и количества катушек, составляющих статор, и без нагрузки на двигатель приближается к скорости вращающегося магнитного поля.На практике нагрузка на двигатель (независимо от того, чем он управляет) также играет роль, замедляя ротор. Чем больше нагрузка, тем больше «пробуксовка» между скоростью вращающегося магнитного поля и фактической скоростью ротора. Чтобы контролировать скорость двигателя переменного тока (чтобы он работал быстрее или медленнее), вы должны увеличивать или уменьшать частоту источника переменного тока, используя так называемый частотно-регулируемый привод. Поэтому, когда вы регулируете скорость чего-то вроде заводской машины, питаемой от асинхронного двигателя переменного тока, вы на самом деле управляете схемой, которая изменяет частоту тока, приводящего в движение двигатель, вверх или вниз.
Что такое «фаза» двигателя переменного тока?
Нам не обязательно приводить в движение ротор с четырьмя катушками (двумя противоположными парами), как показано здесь. Можно построить асинхронные двигатели с любым другим расположением катушек. Чем больше у вас катушек, тем плавнее будет работать мотор. Количество отдельных электрических токов, возбуждающих питание катушек независимо, не в такте, известно как фаза двигателя, поэтому конструкция, показанная выше, представляет собой двухфазный двигатель (с двумя токами, питающими четыре катушки, которые работают не в шаге в двух парах. ).В трехфазном двигателе мы могли бы иметь три катушки, расположенные вокруг статора в виде треугольника, шесть равномерно расположенных катушек (три пары) или даже 12 катушек (три набора по четыре катушки) с одной, двумя или четырьмя катушками. включается и выключается одновременно тремя отдельными противофазными токами.
Анимация: Трехфазный двигатель, питаемый тремя токами (обозначенными красным, зеленым и синие пары катушек), сдвиг по фазе на 120 °.
Преимущества и недостатки асинхронных двигателей
Преимущества
Самым большим преимуществом асинхронных двигателей переменного тока является их простота.У них есть только одна движущаяся часть, ротор, что делает их недорогими, тихими, долговечными и относительно безотказными. ОКРУГ КОЛУМБИЯ двигатели, напротив, имеют коллектор и угольные щетки, которые изнашиваются. выходят и нуждаются в замене время от времени. Трение между щетками и Коммутатор также делает двигатели постоянного тока относительно шумными (а иногда даже довольно вонючими).
Artwork: Электродвигатели чрезвычайно эффективны, обычно преобразуют около 85 процентов поступающей электроэнергии в полезную исходящую механическую работу.Даже в этом случае довольно много энергии теряется в виде тепла внутри обмоток, поэтому двигатели могут сильно нагреваться. Большинство двигателей переменного тока промышленной мощности имеют встроенные системы охлаждения. Внутри корпуса находится вентилятор, прикрепленный к валу ротора (на противоположном конце оси, который приводит в движение любую машину, к которой прикреплен двигатель), показанный здесь красным. Вентилятор всасывает воздух в двигатель, обдувая его снаружи корпуса, минуя ребра вентиляции. Если вы когда-нибудь задумывались, почему электродвигатели имеют эти выступы снаружи (как вы можете видеть на верхнем фото на этой странице), причина в том, что они охлаждают двигатель.
Недостатки
Поскольку скорость асинхронного двигателя зависит от частоты переменного тока, приводящего его в действие, он вращается со скоростью постоянная скорость, если вы не используете частотно-регулируемый привод; Скорость двигателей постоянного тока намного легче контролировать, просто повышая или понижая напряжение питания. Хотя асинхронные двигатели относительно просты, они могут быть довольно тяжелыми и громоздкими из-за их катушечной обмотки. В отличие от двигателей постоянного тока, они не могут работать от батарей или любого другого источника постоянного тока (например, солнечных батарей) без использования инвертора (устройства, которое преобразует постоянный ток в переменный).Это потому, что им нужно изменяющееся магнитное поле, чтобы вращать ротор.
Кто изобрел асинхронный двигатель?
Изображение: оригинальный дизайн Николы Теслы для асинхронного двигателя переменного тока. Он работает точно так же, как и на анимации выше, с двумя синими и двумя красными катушками, поочередно запитываемыми от генератора справа. Это произведение искусства взято из оригинального патента Tesla, депонированного в Бюро по патентам и товарным знакам США, с которым вы можете ознакомиться в приведенных ниже ссылках.
Никола Тесла (1856–1943) был физиком. и плодовитый изобретатель, чей огромный вклад в науку и технику никогда не были полностью признаны. После того, как он приехал в Соединенные Штаты в возрасте 28 лет, он начал работал на известного пионера электротехники Томаса Эдисона. Но двое мужчин поссорились катастрофически и вскоре стали непримиримыми соперниками. Тесла твердо верил что переменный ток (AC) намного превосходил постоянный ток (DC), в то время как Эдисон думал обратное. Со своим партнером Джорджем Westinghouse, Тесла отстаивал AC, в то время как Эдисон был полон решимости управлять миром на DC и придумал всевозможные рекламные трюки, чтобы доказать, что кондиционер слишком опасен для широкого использования (изобретение электрического стула, чтобы доказать, что переменный ток может быть смертельным, и даже ударил током слона Топси с помощью переменного тока, чтобы показать, насколько это было смертельно опасно и жестоко).Битва между этими двумя очень разные взгляды на электроэнергию иногда называют Войной течений.
Несмотря на лучшие (или худшие) усилия Эдисона, Tesla победила, и теперь электричество переменного тока питает большую часть мира. Во многом именно поэтому многие электродвигатели, которые приводить в действие бытовую технику в наших домах, фабриках и офисах переменного тока асинхронные двигатели, работающие от вращающихся магнитных полей, которые Никола Тесла сконструировал в 1880-х годах (его патент, проиллюстрированный здесь, был выдан в мае 1888 года).Итальянский физик по имени Галилео Феррарис независимо друг от друга придумал ту же идею примерно в то же время, но история обошлась с ним еще более жестоко, чем Тесла и его имя теперь почти забыты.
Рекламные ссылкиУзнать больше
На этом сайте
На других сайтах
Книги
Для читателей постарше
Для младших читателей
- Электроэнергия для молодых производителей: забавные и легкие проекты «Сделай сам» Марка де Винка.Maker Media / O’Reilly, 2017. Отличное практическое введение в электричество, включая несколько занятий, связанных с созданием электродвигателей с нуля. Возраст 9–12 лет.
- Эксперименты с электродвигателем Эда Соби. Enslow, 2011. Это отличное общее введение в электродвигатели с большим количеством более широкого научного и технологического контекста. Однако по очевидным практическим соображениям и соображениям безопасности он ориентирован только на проекты с двигателями постоянного тока и лучше всего подходит для детей в возрасте от 11 до 14 лет.
- Сила и энергия Криса Вудфорда.Факты в файле, 2004. Одна из моих книг, рассказывающих об усилиях человека по использованию энергии с древних времен до наших дней. Возраст 10+.
- Никола Тесла: Разработчик электроэнергии Крис Вудфорд, в «Изобретатели и изобретения», том 5. Нью-Йорк: Маршалл Кавендиш, 2008. Краткую биографию Теслы я написал несколько лет назад. На момент написания все это было доступно в Интернете по этой ссылке в Google Книгах. Возраст 9–12 лет.
Патенты
Патентыпредлагают более глубокие технические детали и собственные идеи изобретателя о своей работе.Вот очень небольшая подборка многих патентов США, касающихся асинхронных двигателей.
- Патент США 381 968: Электромагнитный двигатель Николы Тесла, 1 мая 1888 г. Оригинальный патент на асинхронный двигатель переменного тока.
- Патент США 2,959,721: Многофазные асинхронные двигатели, Томас Бартон и др., Lancashire Dynamo & Crypto Ltd, 8 ноября 1960 г. Асинхронный двигатель с улучшенным контролем скорости.
- Патент США 4311932: Жидкостное охлаждение для асинхронных двигателей, Рэймонд Н. Олсон, Sundstrand Corporation, 19 января 1982 г.Эффективный метод жидкостного охлаждения двигателя без чрезмерного сопротивления жидкости вращающимся компонентам.
- Патент США 5,751,082: Асинхронный двигатель с высоким пусковым моментом. Автор: Умеш К. Гупта, Vickers, Inc., 12 мая 1998 г. Современный двигатель с высоким начальным крутящим моментом.
Пожалуйста, НЕ копируйте наши статьи в блоги и другие сайты
статей с этого сайта зарегистрированы в Бюро регистрации авторских прав США. Копирование или иное использование зарегистрированных работ без разрешения, удаление этого или других уведомлений об авторских правах и / или нарушение смежных прав может привести к серьезным гражданским или уголовным санкциям.
Авторские права на текст © Chris Woodford 2012, 2020. Все права защищены. Полное уведомление об авторских правах и условиях использования.
Следуйте за нами
Сохранить или поделиться этой страницей
Нажмите CTRL + D, чтобы добавить эту страницу в закладки на будущее, или расскажите об этом своим друзьям с помощью:
Медиа-запросы?
Вы журналист, у вас есть вопрос для СМИ или просьба об интервью? Вы можете связаться со мной для получения помощи здесь.
Цитируйте эту страницу
Вудфорд, Крис.(2012/2020) Асинхронные двигатели. Получено с https://www.explainthatstuff.com/induction-motors.html. [Доступ (укажите дату здесь)]
Больше на нашем сайте …
Асинхронные двигатели переменного тока| Как работают электродвигатели переменного тока Асинхронные электродвигатели переменного тока
| Как работают двигатели переменного тока — объясните это Рекламное объявлениеКриса Вудфорда. Последнее изменение: 28 июня 2021 г.
Вы знаете, как работают электродвигатели? Ответ, наверное, да и нет! Хотя многие из нас узнали, как базовые моторные работы, из простых научных книг и веб-страниц, таких как эта, многие из моторы, которые мы используем каждый день — от заводских машин до электропоезда — вообще-то так не работают.Какие книги рассказывают нам о простых двигателях постоянного тока (DC), которые имеют петля из проволоки, вращающаяся между полюсами постоянного магнита; в реальной жизни, в большинстве двигателей большой мощности используется переменный ток (AC) и работают совершенно по-другому: это то, что мы называем индукцией двигатели, и они очень изобретательно используют вращающееся магнитное поле. Давайте посмотрим внимательнее!
Фотография: Обычный асинхронный двигатель переменного тока со снятыми корпусом и ротором, на котором показаны медные обмотки катушек, составляющих статор (статическая, неподвижная часть двигателя).Эти катушки предназначены для создания вращающегося магнитного поля, которое вращает ротор (подвижную часть двигателя) в пространстве между ними. Фото Дэвида Парсонса любезно предоставлено Министерством энергетики США / NREL.
Как работает обычный двигатель постоянного тока?
Простые двигатели, которые вы видите в научных книгах, основаны на кусок проволоки, согнутый в прямоугольную петлю, которая подвешена между полюса магнита. (Физики назвали бы это проводник с током сидит в магнитном поле.) Когда вы подключаете такой провод к батарее, через него течет постоянный ток (DC), создавая вокруг него временное магнитное поле. Это временное поле отталкивает исходное поле от постоянного магнита, в результате чего провод перевернуть. Обычно провод останавливался в этой точке, а затем снова переворачивался, но если мы воспользуемся оригинальным вращающимся соединением называется коммутатором, мы можем сделать обратный ток каждый раз, когда проволока переворачивается, а это значит, что проволока будет продолжать вращаться в в том же направлении, пока течет ток.Это суть простого электродвигателя постоянного тока, задуманного в 1820-е годы Майкла Фарадея и превратился в практическое изобретение о десять лет спустя Уильям Стерджен. (Более подробную информацию вы найдете в нашей вводной статье об электродвигателях.)
Изображение: Электродвигатель постоянного тока основан на проволочной петле, вращающейся внутри фиксированного магнитного поля, создаваемого постоянным магнитом. Коммутатор (разрезное кольцо) и щетки (угольные контакты к коммутатору) меняют направление электрического тока каждый раз, когда провод перекручивается, что позволяет ему вращаться в одном и том же направлении.
Прежде чем перейти к двигателям переменного тока, давайте быстро резюмируйте, что здесь происходит. В двигателе постоянного тока магнит (и его магнитное поле) фиксируется на месте и образует внешнюю статическую часть двигатель (статор), а катушка с проводом, несущая электрический ток формирует вращающуюся часть двигателя (ротор). Магнитное поле исходит от статора, который представляет собой постоянного магнита, пока вы подаете электроэнергию на катушку, которая составляет ротор. Взаимодействие между постоянными магнитами поле статора и временное магнитное поле, создаваемое ротором, равно что заставляет мотор крутиться.
Рекламные ссылкиКак работает двигатель переменного тока?
В отличие от игрушек и фонариков, большинство домов, офисов, фабрики и другие здания не питаются от маленьких батареек: на них подается не постоянный ток, а переменный ток (AC), который меняет направление примерно 50 раз в секунду. (с частотой 50 Гц). Если вы хотите запустить двигатель от домашней электросети переменного тока, вместо батареи постоянного тока вам нужна другая конструкция двигателя.
В двигателе переменного тока есть кольцо электромагнитов расположены снаружи (составляя статор), которые предназначены для создания вращающегося магнитного поля.Внутри статора находится цельная металлическая ось, проволочная петля, катушка, беличья клетка из металлических стержней и межсоединений (например, вращающиеся клетки, которым иногда удается развлечь мышей), или другую свободно вращающуюся металлическую деталь, которая может проводить электричество. В отличие от двигателя постоянного тока, где вы посылаете энергию во внутренний ротор, в двигателе переменного тока вы посылаете энергию на внешние катушки, которые составляют статор. Катушки запитываются попарно, последовательно, создает магнитное поле, вращающееся вокруг двигателя.
Фото: Статор создает магнитное поле с помощью туго намотанных катушек из медной проволоки, которые известны как обмотки. Когда электродвигатель изнашивается или перегорает, можно заменить его другим электродвигателем. Иногда легче заменить обмотки двигателя новым проводом — это умелая работа, называемая перемоткой, что и происходит здесь. Фото Сета Скарлетта любезно предоставлено ВМС США.
Как это вращающееся поле заставляет двигатель двигаться? Помните, что ротор, подвешенный внутри магнитное поле, является электрическим проводником.Магнитное поле постоянно меняется (потому что оно вращается), поэтому согласно законам электромагнетизма (если быть точным, закону Фарадея) магнитное поле производит (или индуцирует, если использовать термин Фарадея) электрический ток внутри ротора. Если проводник представляет собой кольцо или провод, ток течет вокруг него по петле. Если проводник представляет собой просто цельный кусок металла, вместо этого вокруг него циркулируют вихревые токи. В любом случае индуцированный ток производит собственное магнитное поле и, согласно другому закону электромагнетизма (Закон Ленца) пытается остановить то, что его вызывает — вращающееся магнитное поле — также вращаясь.(Вы можете думать о роторе отчаянно пытается «догнать» вращающееся магнитное поле, пытаясь устранить разница в движении между ними.) Электромагнитная индукция — это ключ к тому, почему такой двигатель вращается, и поэтому он называется асинхронным.
Фотография: эффективный асинхронный двигатель переменного тока. Фото Аль-Пуэнте любезно предоставлено NREL.
Как работает асинхронный двигатель переменного тока?
Вот небольшая анимация, чтобы подвести итог и, надеюсь, прояснить все:
- Две пары катушек электромагнита, показанные здесь красным и синим цветом, поочередно запитываются источником переменного тока (не показан, но подаются к выводам справа).Две красные катушки соединены последовательно и запитаны вместе, а две синие катушки катушки подключаются таким же образом. Поскольку это переменный ток, ток в каждой катушке не включается и не выключается внезапно (как предполагает эта анимация), а плавно повышается и падает в форме синусоидальной волны: когда красные катушки наиболее активны, синие катушки полностью неактивны, и наоборот. Другими словами, их токи не совпадают (не совпадают по фазе на 90 °).
- Когда катушки находятся под напряжением, магнитное поле, которое они создают между ними, индуцирует электрический ток в роторе.Этот ток создает собственное магнитное поле, которое пытается противодействовать тому, что его вызвало (магнитное поле от внешних катушек). Взаимодействие между двумя полями заставляет ротор вращаться.
- Когда магнитное поле чередуется между красной и синей катушками, оно эффективно вращается вокруг двигателя. Вращающееся магнитное поле заставляет ротор вращаться в одном направлении и (теоретически) почти с одинаковой скоростью.
Асинхронные двигатели на практике
Что контролирует скорость двигателя переменного тока?
Фотография: Двигатель с регулируемой частотой.Фото Уоррена Гретца любезно предоставлено NREL.
В синхронных двигателях переменного тока ротор вращается с той же скоростью, что и вращающееся магнитное поле; в асинхронном двигателе ротор всегда вращается с меньшей скоростью, чем поле, что делает его примером так называемого асинхронного двигателя переменного тока. Теоретическая скорость ротора в асинхронном двигателе зависит от частоты источника переменного тока и количества катушек, составляющих статор, и без нагрузки на двигатель приближается к скорости вращающегося магнитного поля.На практике нагрузка на двигатель (независимо от того, чем он управляет) также играет роль, замедляя ротор. Чем больше нагрузка, тем больше «пробуксовка» между скоростью вращающегося магнитного поля и фактической скоростью ротора. Чтобы контролировать скорость двигателя переменного тока (чтобы он работал быстрее или медленнее), вы должны увеличивать или уменьшать частоту источника переменного тока, используя так называемый частотно-регулируемый привод. Поэтому, когда вы регулируете скорость чего-то вроде заводской машины, питаемой от асинхронного двигателя переменного тока, вы на самом деле управляете схемой, которая изменяет частоту тока, приводящего в движение двигатель, вверх или вниз.
Что такое «фаза» двигателя переменного тока?
Нам не обязательно приводить в движение ротор с четырьмя катушками (двумя противоположными парами), как показано здесь. Можно построить асинхронные двигатели с любым другим расположением катушек. Чем больше у вас катушек, тем плавнее будет работать мотор. Количество отдельных электрических токов, возбуждающих питание катушек независимо, не в такте, известно как фаза двигателя, поэтому конструкция, показанная выше, представляет собой двухфазный двигатель (с двумя токами, питающими четыре катушки, которые работают не в шаге в двух парах. ).В трехфазном двигателе мы могли бы иметь три катушки, расположенные вокруг статора в виде треугольника, шесть равномерно расположенных катушек (три пары) или даже 12 катушек (три набора по четыре катушки) с одной, двумя или четырьмя катушками. включается и выключается одновременно тремя отдельными противофазными токами.
Анимация: Трехфазный двигатель, питаемый тремя токами (обозначенными красным, зеленым и синие пары катушек), сдвиг по фазе на 120 °.
Преимущества и недостатки асинхронных двигателей
Преимущества
Самым большим преимуществом асинхронных двигателей переменного тока является их простота.У них есть только одна движущаяся часть, ротор, что делает их недорогими, тихими, долговечными и относительно безотказными. ОКРУГ КОЛУМБИЯ двигатели, напротив, имеют коллектор и угольные щетки, которые изнашиваются. выходят и нуждаются в замене время от времени. Трение между щетками и Коммутатор также делает двигатели постоянного тока относительно шумными (а иногда даже довольно вонючими).
Artwork: Электродвигатели чрезвычайно эффективны, обычно преобразуют около 85 процентов поступающей электроэнергии в полезную исходящую механическую работу.Даже в этом случае довольно много энергии теряется в виде тепла внутри обмоток, поэтому двигатели могут сильно нагреваться. Большинство двигателей переменного тока промышленной мощности имеют встроенные системы охлаждения. Внутри корпуса находится вентилятор, прикрепленный к валу ротора (на противоположном конце оси, который приводит в движение любую машину, к которой прикреплен двигатель), показанный здесь красным. Вентилятор всасывает воздух в двигатель, обдувая его снаружи корпуса, минуя ребра вентиляции. Если вы когда-нибудь задумывались, почему электродвигатели имеют эти выступы снаружи (как вы можете видеть на верхнем фото на этой странице), причина в том, что они охлаждают двигатель.
Недостатки
Поскольку скорость асинхронного двигателя зависит от частоты переменного тока, приводящего его в действие, он вращается со скоростью постоянная скорость, если вы не используете частотно-регулируемый привод; Скорость двигателей постоянного тока намного легче контролировать, просто повышая или понижая напряжение питания. Хотя асинхронные двигатели относительно просты, они могут быть довольно тяжелыми и громоздкими из-за их катушечной обмотки. В отличие от двигателей постоянного тока, они не могут работать от батарей или любого другого источника постоянного тока (например, солнечных батарей) без использования инвертора (устройства, которое преобразует постоянный ток в переменный).Это потому, что им нужно изменяющееся магнитное поле, чтобы вращать ротор.
Кто изобрел асинхронный двигатель?
Изображение: оригинальный дизайн Николы Теслы для асинхронного двигателя переменного тока. Он работает точно так же, как и на анимации выше, с двумя синими и двумя красными катушками, поочередно запитываемыми от генератора справа. Это произведение искусства взято из оригинального патента Tesla, депонированного в Бюро по патентам и товарным знакам США, с которым вы можете ознакомиться в приведенных ниже ссылках.
Никола Тесла (1856–1943) был физиком. и плодовитый изобретатель, чей огромный вклад в науку и технику никогда не были полностью признаны. После того, как он приехал в Соединенные Штаты в возрасте 28 лет, он начал работал на известного пионера электротехники Томаса Эдисона. Но двое мужчин поссорились катастрофически и вскоре стали непримиримыми соперниками. Тесла твердо верил что переменный ток (AC) намного превосходил постоянный ток (DC), в то время как Эдисон думал обратное. Со своим партнером Джорджем Westinghouse, Тесла отстаивал AC, в то время как Эдисон был полон решимости управлять миром на DC и придумал всевозможные рекламные трюки, чтобы доказать, что кондиционер слишком опасен для широкого использования (изобретение электрического стула, чтобы доказать, что переменный ток может быть смертельным, и даже ударил током слона Топси с помощью переменного тока, чтобы показать, насколько это было смертельно опасно и жестоко).Битва между этими двумя очень разные взгляды на электроэнергию иногда называют Войной течений.
Несмотря на лучшие (или худшие) усилия Эдисона, Tesla победила, и теперь электричество переменного тока питает большую часть мира. Во многом именно поэтому многие электродвигатели, которые приводить в действие бытовую технику в наших домах, фабриках и офисах переменного тока асинхронные двигатели, работающие от вращающихся магнитных полей, которые Никола Тесла сконструировал в 1880-х годах (его патент, проиллюстрированный здесь, был выдан в мае 1888 года).Итальянский физик по имени Галилео Феррарис независимо друг от друга придумал ту же идею примерно в то же время, но история обошлась с ним еще более жестоко, чем Тесла и его имя теперь почти забыты.
Рекламные ссылкиУзнать больше
На этом сайте
На других сайтах
Книги
Для читателей постарше
Для младших читателей
- Электроэнергия для молодых производителей: забавные и легкие проекты «Сделай сам» Марка де Винка.Maker Media / O’Reilly, 2017. Отличное практическое введение в электричество, включая несколько занятий, связанных с созданием электродвигателей с нуля. Возраст 9–12 лет.
- Эксперименты с электродвигателем Эда Соби. Enslow, 2011. Это отличное общее введение в электродвигатели с большим количеством более широкого научного и технологического контекста. Однако по очевидным практическим соображениям и соображениям безопасности он ориентирован только на проекты с двигателями постоянного тока и лучше всего подходит для детей в возрасте от 11 до 14 лет.
- Сила и энергия Криса Вудфорда.Факты в файле, 2004. Одна из моих книг, рассказывающих об усилиях человека по использованию энергии с древних времен до наших дней. Возраст 10+.
- Никола Тесла: Разработчик электроэнергии Крис Вудфорд, в «Изобретатели и изобретения», том 5. Нью-Йорк: Маршалл Кавендиш, 2008. Краткую биографию Теслы я написал несколько лет назад. На момент написания все это было доступно в Интернете по этой ссылке в Google Книгах. Возраст 9–12 лет.
Патенты
Патентыпредлагают более глубокие технические детали и собственные идеи изобретателя о своей работе.Вот очень небольшая подборка многих патентов США, касающихся асинхронных двигателей.
- Патент США 381 968: Электромагнитный двигатель Николы Тесла, 1 мая 1888 г. Оригинальный патент на асинхронный двигатель переменного тока.
- Патент США 2,959,721: Многофазные асинхронные двигатели, Томас Бартон и др., Lancashire Dynamo & Crypto Ltd, 8 ноября 1960 г. Асинхронный двигатель с улучшенным контролем скорости.
- Патент США 4311932: Жидкостное охлаждение для асинхронных двигателей, Рэймонд Н. Олсон, Sundstrand Corporation, 19 января 1982 г.Эффективный метод жидкостного охлаждения двигателя без чрезмерного сопротивления жидкости вращающимся компонентам.
- Патент США 5,751,082: Асинхронный двигатель с высоким пусковым моментом. Автор: Умеш К. Гупта, Vickers, Inc., 12 мая 1998 г. Современный двигатель с высоким начальным крутящим моментом.
Пожалуйста, НЕ копируйте наши статьи в блоги и другие сайты
статей с этого сайта зарегистрированы в Бюро регистрации авторских прав США. Копирование или иное использование зарегистрированных работ без разрешения, удаление этого или других уведомлений об авторских правах и / или нарушение смежных прав может привести к серьезным гражданским или уголовным санкциям.
Авторские права на текст © Chris Woodford 2012, 2020. Все права защищены. Полное уведомление об авторских правах и условиях использования.
Следуйте за нами
Сохранить или поделиться этой страницей
Нажмите CTRL + D, чтобы добавить эту страницу в закладки на будущее, или расскажите об этом своим друзьям с помощью:
Медиа-запросы?
Вы журналист, у вас есть вопрос для СМИ или просьба об интервью? Вы можете связаться со мной для получения помощи здесь.
Цитируйте эту страницу
Вудфорд, Крис.(2012/2020) Асинхронные двигатели. Получено с https://www.explainthatstuff.com/induction-motors.html. [Доступ (укажите дату здесь)]
Больше на нашем сайте …
Принцип работы двигателя переменного тока с основами и конструкцией
Принцип работы двигателя переменного тока основан на простых принципах магнетизма. Но прежде чем подробно обсудить принцип работы двигателя переменного тока, давайте разберемся с основами. AC — это сокращение от Alternating Current .В то время как постоянный или постоянный ток остается постоянным во времени, переменный ток периодически меняет свое направление.
Разница между переменным током и постоянным током:
Профиль постоянного напряжения показан на рисунке ниже. Посмотрите, как величина напряжения остается постоянной с течением времени. Генератор постоянного тока и двигатель постоянного тока требуют такого напряжения для работы.
Форма сигнала постоянного напряженияНиже приводится профиль напряжения переменного тока.
Один полный цикл питания переменного тока- При подаче сигнала переменного тока для двигателя переменного тока величина напряжения начинается с нуля, увеличивается до максимального значения, а затем начинает уменьшаться, пока снова не достигнет нуля. Он составляет полупериод и известен как положительный полупериод .
- После завершения полупериода величина напряжения снова увеличивается, но уже в обратном направлении.Он следует той же схеме, что и положительный полупериод, и известен как отрицательный полупериод .
- Комбинация положительных и отрицательных циклов составляет один полный цикл.
- Время, необходимое для завершения этого цикла, известно как период времени . Обратный период времени равен , частота . Итак, для электрической системы с частотой 50 Гц этот один цикл завершается за 0.02 сек. Электродвигатели переменного тока
- работают по принципу электромагнитной индукции . Он преобразует электрическую энергию (в форме переменного тока) в механическую энергию (вращение вала).
- Принцип работы двигателя переменного тока подробно объясняется после базовой конструкции двигателя переменного тока.
Базовая конструкция двигателя переменного тока
Конструкция двигателя переменного тока** Источник изображения
Итак, разобравшись с основами, давайте узнаем, как двигатель переменного тока выглядит изнутри.
- Если упростить конструкцию двигателя переменного тока, он состоит из двух основных частей. Стационарная конструкция (он же статор) и вращающаяся часть (он же ротор).
- Неподвижная часть состоит из катушек, покрывающих всю ее внутреннюю периферию. При прохождении электрического тока через эти обмотки электромагниты возбуждаются, создавая полюса чередующейся полярности. В двигателях переменного тока
- в качестве ротора используется постоянный магнит или сердечник из тонкой многослойной стали .В последнем в качестве проводника используются токопроводящие шины вместо катушек с проволокой.
- Вал удерживает вращающуюся часть двигателя. Подшипники между ними обеспечивают свободное движение ротора.
- Наружная рама охватывает как неподвижную, так и вращающуюся часть. Он защищает двигатель от воды или любых других факторов окружающей среды.
** Изображение предоставлено
Принцип работы электродвигателя переменного тока в деталях
Чтобы понять, как работает двигатель переменного тока, рассмотрим ротор с постоянными магнитами.Ротор свободно перемещается между двумя полюсами электромагнитного статора (полюс A и B) с небольшим воздушным зазором между ними. Электромагниты подключаются напрямую к источнику переменного тока.
При подаче питания переменного тока на электромагниты подается напряжение и образуются магнитные полюса.
Дело 1:
Во время положительного полупериода подачи переменного тока пусть полюс A достигает полярности северного полюса, а полюс B достигает полярности южного полюса.Теперь по закону магнетизма противоположные полюса будут притягиваться друг к другу. Итак, полюс А притягивает южный полюс ротора. И ротор выравнивается в положении, как показано на рисунке.
Ориентация ротора во время положительного полупериодаДело 2:
Во время отрицательного полупериода полярность источника переменного тока меняется на противоположную, и, следовательно, полярность полюсов также меняется на противоположную. Итак, теперь полюс A достигает полярности южного полюса, а полюс B — полярности северного полюса.
В этой ситуации одинаковые полюса обращены друг к другу.Таким образом, отталкивающая магнитная сила будет пытаться отклонить ротор из этого положения. Когда ротор отклоняется, в картину вступает сила притяжения. Таким образом, теперь полюс А притягивает северный полюс ротора. Ротор выравнивается в новом положении, как показано на рисунке.
Вращающееся магнитное поле в двигателе переменного тока
Ротор повернулся на угол 180 градусов. Ротор снова поворачивается на 180 градусов в предстоящем положительном полупериоде и так далее.Этот оборот ротора продолжается до тех пор, пока на обмотку статора подается питание.
Вращающееся магнитное поле статора с питанием переменного токаЕсли мы наблюдаем, магнитное поле статора постоянно меняется. В каждом цикле подачи переменного тока магнитное поле кажется вращающимся внутри периферии статора. Технически это называется вращающимся магнитным полем.
Что такое RPM (число оборотов в минуту)?
Оборот ротора на 180 градусов за один цикл переменного токаДля любой вращающейся машины число оборотов в минуту означает скорость вращения ротора.Это количество оборотов ротора за одну минуту. На приведенном выше рисунке показано, что ротор вращается на 180 градусов за один цикл переменного тока. Таким образом, для системы с частотой 50 Гц ротор совершает один оборот за 0,02 секунды. Верный? Итак, за одну секунду этот ротор сделает 50 оборотов. Следовательно, за одну минуту ротор успешно совершит 3000 оборотов внутри периферии статора. Очень быстро, правда? Итак, в нашем обсуждаемом примере скорость ротора составляет 3000 об / мин.
Заключение
Вышеупомянутая теория была просто примером, объясняющим, как работает двигатель переменного тока.В электрических системах двигатели переменного тока обычно имеют более двух электромагнитных полюсов для лучшего распределения магнитного потока. Не все двигатели переменного тока используют постоянный магнит. В зависимости от области применения требуются разные типы роторов. Но основной принцип работы двигателя переменного тока всегда остается неизменным. то есть заставляя ротор вращаться в соответствии с вращающимся магнитным полем статора.
Принцип работы двигателя переменного тока
Двигателипеременного тока отличаются от двигателей постоянного или постоянного тока тем, что в них используется переменный ток, который меняет направление.Эти двигатели по-прежнему широко используются в современной жизни, и вы можете найти их в бытовой технике и гаджетах у себя дома. В этом блоге мы говорим о принципе работы двигателя переменного тока.
Что такое двигатель переменного тока?
Двигатель, который преобразует переменный ток в механическую энергию с помощью явления электромагнитной индукции, называется двигателем переменного тока . Статор и ротор — две наиболее важные части двигателей переменного тока. Статор — это неподвижная часть двигателя.А ротор — это вращающаяся часть мотора. Двигатель переменного тока может быть однофазным или трехфазным.
Принцип работы двигателя переменного тока
Основная работа двигателя переменного тока зависит от принципа магнетизма. Простой двигатель переменного тока содержит катушку с проводом и два фиксированных магнита, окружающих вал. Когда электрический заряд (переменный ток) применяется к катушке с проволокой, она становится электромагнитом. Этот электромагнит генерирует магнитное поле.
Внутри статора находится цельная металлическая ось, проволочная петля, катушка, беличья клетка из металлических стержней и некоторые другие свободно вращающиеся металлические части, которые могут проводить электричество.В двигателе переменного тока энергия подается на внешние катушки, составляющие статор. Катушки включаются попарно, последовательно, создавая магнитное поле, которое вращается вокруг двигателя снаружи.
Знаете ли вы, как это вращающееся поле заставляет двигатель двигаться?
Ротор подвешен внутри магнитного поля. Магнитное поле постоянно меняется из-за вращения, поэтому, согласно закону электромагнетизма, магнитное поле создает электрический ток внутри ротора.
Если проводник представляет собой кольцо или провод, ток течет вокруг него в виде петли. Если проводник представляет собой просто цельный кусок металла, вместо этого вокруг него протекают вихревые токи. Индуцированный ток создает собственное магнитное поле и, согласно другому закону электромагнетизма, вращающееся магнитное поле также создается путем вращения. Проще говоря, когда магниты взаимодействуют, вал и катушка проводов начинают вращаться, что приводит в действие двигатель.
ДОЛЖЕН ПРОЧИТАТЬ ДОБАВЛЕНИЯ В БЛОГЕ ДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА
Разница между двигателем переменного и постоянного тока
Типы двигателей переменного тока
В основном электродвигатели переменного тока подразделяются на два типа.Это синхронный двигатель и асинхронный двигатель.
1. Синхронный двигатель переменного тока
Двигатель, который преобразует электрическую мощность переменного тока в механическую энергию и работает только с синхронной скоростью, называется синхронным двигателем.
Когда питание подается на синхронный двигатель, создается вращающееся поле. Это поле пытается увлечь за собой ротор, но из-за инерции ротора он не может вращаться. Следовательно, он не создает пусковой крутящий момент.Таким образом, синхронный двигатель не запускается автоматически.
2. Асинхронный или асинхронный двигатель переменного тока
Машина, которая преобразует электрическую мощность переменного тока в механическую с помощью явления электромагнитной индукции, называемого асинхронным двигателем. Асинхронный двигатель делится на два типа
- Однофазный асинхронный двигатель
- Трехфазные асинхронные двигатели.
В индукционной машине обмотка якоря служит одновременно обмоткой якоря и обмоткой возбуждения.Когда обмотки статора подключаются к источнику переменного тока, в воздушном зазоре возникает магнитный поток. Поток вращается с фиксированной скоростью, называемой синхронной скоростью. Этот вращающийся поток индуцирует напряжения в обмотке статора и ротора.
Если цепь ротора замкнута, ток течет через обмотку ротора и реагирует с вращающимся потоком, создавая крутящий момент. В установившемся режиме ротор вращается со скоростью, очень близкой к синхронной.
Применение двигателя переменного тока
Электродвигатели переменного токаможно найти во многих бытовых приборах и приложениях,
- Часы
- Электроинструменты
- Накопители
- Стиральные машины и другая бытовая техника
- Проигрыватели виниловых пластинок
- Вентиляторы
Их также можно найти в промышленных приложениях, - Насосы
- Воздуходувки
- Конвейеры
- Компрессоры
Надеюсь, эта статья поможет вам понять принцип работы двигателя переменного тока.
Мы в Robu.in надеемся, что вам было интересно, и что вы вернетесь к другим нашим образовательным блогам.
Что такое трехфазный двигатель и как он работает?
Трехфазные двигатели (также численно обозначаемые как трехфазные двигатели) широко используются в промышленности и стали рабочей лошадкой многих механических и электромеханических систем из-за их относительной простоты, проверенной надежности и длительного срока службы. Трехфазные двигатели являются одним из примеров типа асинхронного двигателя, также известного как асинхронный двигатель, который работает на принципах электромагнитной индукции.Хотя существуют также однофазные асинхронные двигатели, эти типы асинхронных двигателей реже используются в промышленных приложениях, но широко используются в бытовых приложениях, таких как пылесосы, компрессоры холодильников и кондиционеры, из-за использования однофазных двигателей. фаза переменного тока в домах и офисах. В этой статье мы обсудим, что такое трехфазный двигатель, и опишем, как он работает. Чтобы получить доступ к другим ресурсам о двигателях, обратитесь к одному из наших других руководств по двигателям, посвященным двигателям переменного тока, двигателям постоянного тока, асинхронным двигателям, или к более общей статье о типах двигателей.Полный список статей о моторах можно найти в разделе статей по теме.
Что такое трехфазное питание?
Чтобы понять трехфазные двигатели, полезно сначала понять трехфазную мощность.
При производстве электроэнергии переменный ток (AC), создаваемый генератором, имеет характеристику, состоящую в том, что его амплитуда и направление меняются со временем. Если показано графически с амплитудой по оси Y и временем по оси X, соотношение между напряжением или током в зависимости отвремя будет напоминать синусоидальную волну, как показано ниже:
Рисунок 1 — Однофазный переменный ток
Изображение предоставлено: Фуад А. Саад / Shutterstock.com
Электроэнергия, подаваемая в дома, является однофазной, это означает, что имеется один токоведущий провод плюс нейтраль и заземление. В трехфазном питании, которое используется в промышленных и коммерческих условиях для работы более крупного оборудования, которое требует большей мощности, есть три проводника электрического тока, каждый из которых работает с разностью фаз 120 o 2π / 3. радианы друг от друга.Если рассматривать графически, каждая фаза будет выглядеть как отдельная синусоида, которая затем объединяется, как показано на изображении ниже:
Рисунок 2 — Трехфазное электрическое питание со сдвигом фаз 120
o между каждой фазойИзображение предоставлено: teerawat chitprung / Shutterstock.com
Трехфазные двигатели питаются от электрического напряжения и тока, которые генерируются как трехфазная входная мощность и затем используются для выработки механической энергии в виде вращающегося вала двигателя.
Что такое трехфазный двигатель?
Трехфазные двигатели — это тип двигателя переменного тока, который является конкретным примером многофазного двигателя. Эти двигатели могут быть асинхронными двигателями (также называемыми асинхронными двигателями) или синхронными двигателями. Двигатели состоят из трех основных компонентов — статора, ротора и корпуса.
Статор состоит из ряда пластин из легированной стали, вокруг которых намотана проволока, образуя индукционные катушки, по одной катушке на каждую фазу источника электроэнергии.Катушки статора питаются от трехфазного источника питания.
Ротор также содержит индукционные катушки и металлические стержни, соединенные в цепь. Ротор окружает вал двигателя и представляет собой компонент двигателя, который вращается для выработки механической энергии на выходе двигателя.
Корпус двигателя удерживает ротор с валом двигателя на комплекте подшипников для уменьшения трения вращающегося вала. Корпус имеет торцевые крышки, удерживающие опоры подшипников и вентилятор, прикрепленный к валу двигателя, который вращается при вращении вала двигателя.Вращающийся вентилятор втягивает окружающий воздух снаружи корпуса и заставляет воздух проходить через статор и ротор для охлаждения компонентов двигателя и рассеивания тепла, которое генерируется в различных катушках из-за сопротивления катушки. Кожух также обычно имеет выступающие механические ребра снаружи, которые служат для дальнейшего отвода тепла в наружный воздух. Торцевая крышка также обеспечит место для электрических соединений для трехфазного питания двигателя.
Как работает трехфазный двигатель?
Трехфазные двигатели работают по принципу электромагнитной индукции, который был открыт английским физиком Майклом Фарадеем еще в 1830 году.Фарадей заметил, что когда проводник, такой как катушка или проволочная петля, помещается в изменяющееся магнитное поле, в проводнике возникает наведенная электродвижущая сила или ЭДС. Он также заметил, что ток, протекающий в проводнике, таком как провод, будет генерировать магнитное поле и что магнитное поле будет изменяться, когда ток в проводе изменяется по величине или направлению. Это выражается в математической форме, связывая ротор электрического поля со скоростью изменения магнитного потока во времени:
Эти принципы составляют основу для понимания того, как работает трехфазный двигатель.
На рисунке 3 ниже показан закон индукции Фарадея. Обратите внимание, что наличие ЭДС зависит от движения магнита, которое приводит к изменению магнитного поля.
Рисунок 3 — Принцип электромагнитной индукции
Изображение предоставлено: Фуад А. Саад / Shutterstock.com
Для асинхронных двигателей, когда статор питается от трехфазного источника электроэнергии, каждая катушка генерирует магнитное поле, полюса которого (северный или южный) меняют положение, когда переменный ток колеблется в течение полного цикла.Поскольку каждая из трех фаз переменного тока сдвинута по фазе на 120 o , магнитная полярность трех катушек не одинакова в один и тот же момент времени. Это состояние приводит к тому, что статор создает так называемое RMF или вращающееся магнитное поле. Поскольку ротор находится в центре катушек статора, изменяющееся магнитное поле статора индуцирует ток в катушках ротора, что, в свою очередь, приводит к возникновению противоположного магнитного поля, создаваемого ротором. Поле ротора стремится выровнять свою полярность относительно поля статора, в результате к валу двигателя прикладывается чистый крутящий момент, и он начинает вращаться, пытаясь выровнять свое поле.Обратите внимание, что в трехфазном асинхронном двигателе нет прямого электрического соединения с ротором; магнитная индукция вызывает вращение двигателя.
В трехфазных асинхронных двигателях ротор стремится поддерживать соосность с RMF статора, но никогда не достигает этого, поэтому асинхронные двигатели также называют асинхронными. Явление, которое заставляет скорость ротора отставать от скорости RMF, известно как скольжение, что выражается как:
, где N r — это скорость ротора, а N s — синхронная скорость вращающегося поля (RMF) статора.
Синхронные двигатели работают аналогично асинхронным двигателям, за исключением того, что в случае синхронного двигателя поля статора и ротора синхронизированы, так что RMF статора заставляет ротор вращаться с точно такой же скоростью вращения (в синхронизация — следовательно, скольжение равно 0). Дополнительные сведения о том, как это сделать, см. В статьях о реактивных двигателях и бесщеточных двигателях постоянного тока. Обратите внимание, что синхронные двигатели, в отличие от асинхронных, не нуждаются в питании от сети переменного тока.
Контроллеры двигателей для трехфазных двигателей
Скорость, создаваемая трехфазным двигателем переменного тока, является функцией частоты сети переменного тока, поскольку она является источником RMF в обмотках статора. Поэтому некоторые контроллеры двигателей переменного тока работают, используя вход переменного тока для генерации модулированной или управляемой частоты на входе двигателя, тем самым управляя скоростью двигателя. Другой подход, который можно использовать для управления скоростью двигателя, — это изменение скольжения (описано ранее).Если скольжение увеличивается, скорость двигателя (то есть скорость ротора) уменьшается.
Чтобы узнать больше о подходах к управлению двигателями, просмотрите нашу статью о контроллерах двигателей переменного тока.
Сводка
В этой статье представлено краткое обсуждение того, что такое трехфазные двигатели и как они работают. Чтобы узнать больше о двигателях, ознакомьтесь с нашими соответствующими статьями, перечисленными ниже. Для получения информации о других продуктах обратитесь к нашим дополнительным руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://kebblog.com/how-a-3-phase-ac-induction-motor-works/
- https://www.engineering.com/ElectronicsDesign/ElectronicsDesignArticles/ArticleID/15848/Three-Phase-Electric-Power-Explained.aspx
- http://www.oddparts.com/oddparts/acsi/defines/poles.htm
- http://www.gohz.com/how-to-determine-the-pole-number-of-an-induction-motor
- https://www.elprocus.com/induction-motor-types-advantages/
- https: // www.intechopen.com/books/electric-machines-for-smart-grids-applications-design-simulation-and-control/single-phase-motors-for-household-applications
- https://www.worldwideelectric.net/resource/construction-ac-motors/
Прочие изделия для двигателей
Больше от Machinery, Tools & Supplies
Как работает однофазный двигатель?
Чтобы понять, как работает однофазный асинхронный двигатель переменного тока, полезно понять основы работы с трехфазным асинхронным двигателем.
Ток в статоре трехфазного двигателя (неподвижные катушки в двигателе) создает вращающееся магнитное поле. Магнитное поле вращается из-за сдвига фазы на 120 ° в каждой фазе источника питания. Это вращающееся магнитное поле индуцирует ток в стержнях ротора. Ток в роторе создает собственное магнитное поле. Взаимодействие между магнитными полями статора и ротора заставляет ротор вращаться. Для трехфазных двигателей следует отметить одну важную вещь: поскольку они работают на трех фазах, которые смещены друг относительно друга, они самозапускаются.(См. Верхний рисунок.)
Как он «вращается»
Однофазные двигатели работают по тому же принципу, что и трехфазные двигатели, за исключением того, что они работают только от одной фазы. Одна фаза создает колеблющееся магнитное поле, которое движется вперед и назад, а не вращающееся магнитное поле (см. Нижний рисунок). Из-за этого у настоящего однофазного двигателя нулевой пусковой момент. Однако, как только ротор начинает вращаться, он продолжает вращаться в результате колебания магнитного поля в статоре.
На протяжении многих лет инженеры изобретали умные способы запуска однофазных двигателей. Большинство из них связано с созданием второй фазы, которая помогает создавать вращающееся магнитное поле в статоре. Эту фазу часто называют стартовой или вспомогательной.
Типы однофазных двигателей
Некоторыми из различных типов однофазных двигателей являются двигатель с экранированными полюсами, двигатель с расщепленной фазой, двигатель с постоянным разделенным конденсатором (также называемый двигателем с однофазным конденсатором) и двигатель с двумя конденсаторами.Основное различие в конструкции этих двигателей заключается в том, как производится вторая фаза. В двигателях с экранированным полюсом и в двигателях с разделенной фазой конденсатор не используется, в то время как в двигателях с постоянным разделенным конденсатором (PSC) и двумя номинальными конденсаторами используется. Двигатели с разделенной фазой и конденсаторные двигатели с двумя номиналами могут использовать центробежный переключатель для отключения фазы запуска, когда двигатели набирают скорость, в то время как двигатели с экранированным полюсом и двигатели PSC не имеют переключателя.
У каждого из этих двигателей также есть свои компромиссы в производительности.Двигатели с экранированными полюсами — очень простые двигатели и, как правило, недорогие, но они имеют низкий КПД и, как правило, предназначены для применения с малой мощностью. Двигатели с расщепленной фазой, как правило, недорогие, но у них низкий пусковой момент и высокий пусковой ток. Двигатели PSC предлагают более высокий пусковой момент и более высокий КПД, чем двигатели без конденсатора.
>> Хотите узнать больше об асинхронных двигателях? Прочтите в нашем блоге сообщение о синхронных и асинхронных двигателях или посмотрите наше видео о том, как выбрать мотор-редуктор.
Конструкция двигателей переменного тока
Если вы читали нашу предыдущую статью Двигатели переменного тока: основная терминология, то теперь вы понимаете:
- Назначение двигателей переменного тока
- Стандарты NEMA для электрического оборудования и
- Основное понятие крутящего момента , скорость и мощность.
Теперь мы обсудим конструкцию двигателей переменного тока, чтобы вы могли определить ключевые отличия деталей двигателя и то, как каждый продукт работает для любого конкретного применения.
Конструкция двигателей переменного тока
В промышленности часто используются асинхронные двигатели переменного тока. Мы обсудим 3-фазные асинхронные асинхронные двигатели 460 В переменного тока. Когда скорость вращающегося магнитного поля больше скорости ротора, вы знаете, что это асинхронный двигатель (см. Рисунок). Двигатель переменного тока состоит из трех основных частей: статора, ротора и корпуса.
Конструкция статора
Статор и ротор на самом деле представляют собой электрические цепи, которые работают как электромагниты.Статор — это электрическая часть двигателя, которая не движется. Для двигателя NEMA сердечник статора состоит из нескольких сотен тонких пластин.
Обмотки статора
Пластины статора образуют полый цилиндр. В каждый паз сердечника статора помещается катушка изолированного провода. Электромагнит образован каждой группой катушек и окружающим их стальным сердечником. Двигатели работают благодаря электромагнетизму. Источник питания напрямую подключен к обмоткам статора.
Конструкция ротора
В электромагнитной цепи ротор — это вращающаяся часть. Ротор с короткозамкнутым ротором является наиболее распространенным типом ротора. Подумайте о вращающихся колесах для упражнений, используемых в клетках для домашних хомяков, и вы поймете, как устроен ротор клетки для беличьих коров. Ротор состоит из пакета стальных пластин, которые включают равномерно разнесенные токопроводящие шины по периметру.
Сердечник ротора состоит из многослойных пластин. Алюминий отливается под давлением в пазах сердечника ротора, образуя серию проводников по окружности ротора.Токопроводящие шины электрически и механически соединены с концевыми кольцами. Наконец, сердечник ротора устанавливается на стальной вал.
Корпус двигателя
Корпус состоит из рамы или ярма и двух концевых кронштейнов, также называемых корпусами подшипников. Статор установлен внутри рамы. Ротор находится внутри статора, но разделен небольшим воздушным зазором, поэтому они не имеют прямого физического контакта друг с другом. Кожух предназначен для защиты рабочих и электрических частей двигателя от агрессивных сред, в которых они работают.Подшипники, установленные на валу, поддерживают ротор, что позволяет ему вращаться. На валу установлен вентилятор на тот случай, когда двигатель нужно охладить.
Теперь вы можете описать конструкцию двигателя переменного тока с короткозамкнутым ротором. Эти знания должны помочь вам, когда вам нужно выбрать правильный двигатель для вашего конкретного применения. Если у вас возникнут вопросы, мы с радостью поможем. Свяжитесь с нами через Интернет, и мы поможем вам разобраться в ваших вариантах двигателей переменного тока и решить, какой из них лучше всего подходит для вашей области применения.