Volkswagen и VR-образный двигатель
Рядно-смещенная компоновка, которую обозначают буквами «VR», появилась еще в 1920-е годы, когда компания Lancia имела выпуск семейства V-образных моторов с очень маленьким углом развала цилиндров (всего 10-20°). Однако, впоследствии такие агрегаты не нашли распространения, в первую очередь из-за чрезмерной вибронагруженности.
Лишь в 1991 году компания Volkswagen возродила рядно-смещённую схему, т.к. в то время немецкий концерн нуждался в мощном шестицилиндровом моторе для установки на компактные модели Seat, Audi и Volkswagen. Традиционный V6 оказался для них слишком широким. Новые двигатели получили обозначение VR, и с тех пор это название стало официальным для рядно-смещённых агрегатов. «VR» — аббревиатура двух немецких слов, обозначающих V-образный и R-рядный, то есть «v-образно-рядный». Двигатель, спроектированный компанией Volkswagen представляет собой симбиоз V-образного двигателя с очень маленьким углом развала 15° и рядного двигателя
 Его 6 цилиндров расположены V-образно под углом 15°, а традиционные V-образные двигатели, имеют угол 60° или 90°. Поршни расположены в специальном блоке в шахматном порядке. Совокупность достоинств этих типов двигателей привела к тому, что двигатель VR6 стал настолько компактным и мобильным, что это позволило накрыть оба ряда цилиндров общей головкой, в отличие от стандартного V-образного двигателя. В итоге двигатель VR6 получился существенно короче по длине, чем рядный 6 цилиндровый, и уже по ширине, чем V-образный 6-цилиндровый двигатель. Ставился с 1991 года на автомобили Volkswagen Passat, Corrado, Golf, Vento, Jetta, Sharan.
Его 6 цилиндров расположены V-образно под углом 15°, а традиционные V-образные двигатели, имеют угол 60° или 90°. Поршни расположены в специальном блоке в шахматном порядке. Совокупность достоинств этих типов двигателей привела к тому, что двигатель VR6 стал настолько компактным и мобильным, что это позволило накрыть оба ряда цилиндров общей головкой, в отличие от стандартного V-образного двигателя. В итоге двигатель VR6 получился существенно короче по длине, чем рядный 6 цилиндровый, и уже по ширине, чем V-образный 6-цилиндровый двигатель. Ставился с 1991 года на автомобили Volkswagen Passat, Corrado, Golf, Vento, Jetta, Sharan.Первые двенадцатиклапанные моторы VR6 имели заводские индексы «AAA» (объём 2.8 литра, мощность 174 л.с.) и «ABV» (объём 2.9 литра, мощность 190 л.с.). Со временем в линейке моторов Volkswagen появились и другие модификации, выплывающие из данной компоновки:
VR5 — VR6, у которого нет одного цилиндра,
W8 — имеет два мотора VR6, от которых «отрезано» по два цилиндра в каждом моторе, на одном коленвале в одном блоке,
W12 — два мотора VR6, которые установли под углом 72° на одном коленвале.
Позже, как развитие данной вариации, появились двигатели R36 и R32, объёмом 3,6 л и 3,2 л соответственно.
Модификации двигателей VR6, устанавливавшихся на автомобили Volkswagen:
- «AAA» (2.8), 174 л.с. — Passat (06/1991-12/1996), Golf (01/1992-12/1997), Jetta (07/1993-08/1996), Vento (07/1994-12/1997), Sharan (09/1995-03/1998)
- «ABV» (2.9), 184 л.с. — Passat (10/1994-12/1996)
- «ABV» (2.9), 190 л.с. — Corrado (08/1991-07/1995), Golf (10/1994-12/1997)
- «AES» (2.8), 140 л.с. — Transporter/California (01/1996-05/2000)
- «AMY» (2.8), 174 л.с. — Sharan (04/1998-02/2000)
- «AFP» (2.8), 177 л.с. — Jetta (11/1998-06/2002)
- «AYL» (2.8), 204 л.с. — Sharan (04/2000-)
- «AUE» (2.8), 204 л.с. — Bora (05/2000-04/2001), Golf(01/00-04/01)
R32:
- «AYT» (3.2), 241 л.с. — Phaeton (05/2002-05/2005)
- «BKL» (3.2), 241 л.с. — Phaeton (08/2003-)
- «BRK» (3.2), 241 л.с. — Phaeton (05/2004-)
- «BUB» (3.
 2), 250 л.с. — Golf (11/2005-)
2), 250 л.с. — Golf (11/2005-) - «BML» (3.2), 244 л.с. — Golf (10/2003-05/2004)
- «BFH» (3.2), 244 л.с. — Golf (06/2002-05/2004)
R36:
- «BLV» (3.6, 280 л.с. — Passat (09/2005-)
- «BHL» (3.6, 280 л.с. — Touareg (10/2005-)
- «BHK» (3.6), 280 л.с. — Touareg (10/2005-)
Конфигурация двигателя VR — это… Что такое Конфигурация двигателя VR?
| В этой статье не хватает ссылок на источники информации. Информация должна быть проверяема, иначе она может быть поставлена под сомнение и удалена. Вы можете отредактировать эту статью, добавив ссылки на авторитетные источники. Эта отметка установлена 6 августа 2011. |
Конфигурация двигателя VR
Рядно-смещенная компоновка, которая обозначается буквами «VR», зародилась в 20-е годы прошлого века. Именно тогда компания Lancia наладила выпуск семейства V-образных моторов с очень маленьким углом развала цилиндров (всего 10-20°).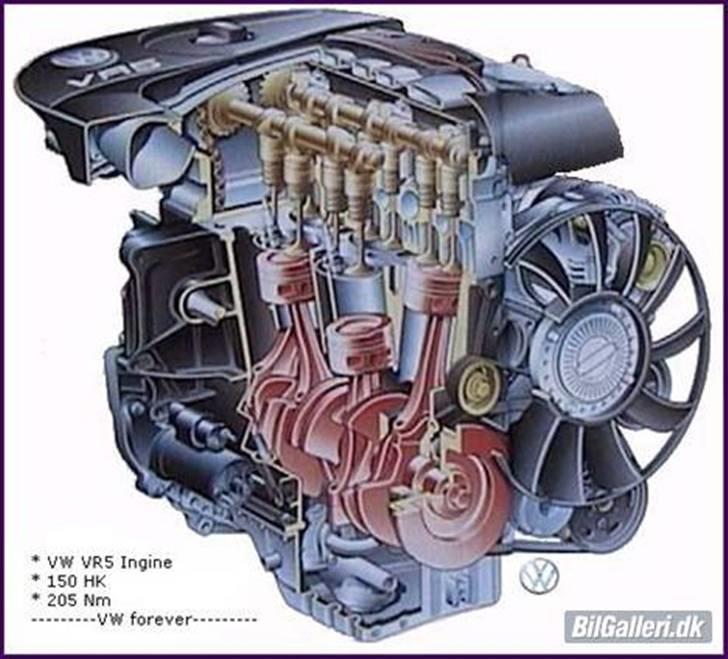 Тем не менее, впоследствии подобные агрегаты не нашли распространения, главным образом из-за чрезмерной вибронагруженности.
Тем не менее, впоследствии подобные агрегаты не нашли распространения, главным образом из-за чрезмерной вибронагруженности.
Лишь в 1991 году Volkswagen возродил рядно-смещённую схему, поскольку в то время немецкому концерну был необходим мощный шестицилиндровый мотор для установки на компактные модели Audi, Seat и Volkswagen. Традиционный V6 оказался для них излишне широким. Кстати, новые двигатели получили обозначение VR, и с тех пор это название стало официальным для рядно-смещённых агрегатов. «VR» — аббревиатура двух немецких слов, обозначающих V-образный и R-рядный, т.е «v-образно-рядный». Двигатель, разработанный компанией Volkswagen представляет собой симбиоз V-образного двигателя с экстремально малым углом развала 15° и рядного двигателя. Его шесть цилиндров расположены V-образно под углом 15°, в отличие от традиционных V-образных двигателей, имеющих угол 60° или 90°. Поршни расположены в блоке в шахматном порядке. Совокупность достоинств обоих типов двигателей привела к тому, что двигатель VR6 стал настолько компактным, что позволил накрыть оба ряда цилиндров одной общей головкой, в отличие от обычного V-образного двигателя.
Первые двенадцатиклапанные моторы VR6 имели заводские индексы «AAA» (объём 2.8 литра, мощность 174 л.с.) и «ABV» (объём 2.9 литра, мощность 190 л.с.). Позже в линейке моторов Volkswagen появились и другие модификации, вытекающие из данной компоновки:
— VR5 — VR6, от которого «отрезали» один цилиндр,
— W8 — два мотора VR6, от которых «отрезано» по два цилиндра, в одном блоке на одном коленвале,
— W12 — два мотора VR6, установленные под углом 72° на одном коленвале.
Модификации двигателей VR6, устанавливавшихся на автомобили Volkswagen:
«AAA» 2.8, 174 л.с. — Passat (06/1991-12/1996), Golf (01/1992-12/1997), Jetta (07/1993-08/1996), Vento (07/1994-12/1997), Sharan (09/1995-03/1998)
«ABV» 2.9, 184 л.с. — Passat (10/1994-12/1996)
«ABV» 2. 9, 190 л.с. — Corrado (08/1991-07/1995), Golf (10/1994-12/1997)
«AES» 2.8, 140 л.с. — Transporter/California (01/1996-05/2000)
«AFP» 2.8, 177 л.с. — Jetta (11/1998-06/2002)
«AYL» 2.8, 204 л.с. — Sharan (04/2000-)
«AUE» 2.8, 204 л.с. — Bora (05/2000-04/2001), Golf(01/00-04/01) R32:
«AYT» 3.2, 241 л.с. — Phaeton (05/2002-05/2005)
«BKL» 3.2, 241 л.с. — Phaeton (08/2003-)
«BRK» 3.2, 241 л.с. — Phaeton (05/2004-)
«BUB» 3.2, 250 л.с. — Golf (11/2005-)
«BML» 3.2, 244 л.с. — Golf (10/2003-05/2004)
«BFH» 3.2, 244 л.с. — Golf (06/2002-05/2004) R36:
«BLV» 3.6, 280 л.с. — Passat (09/2005-)
«BHL» 3.6, 280 л.с. — Touareg (10/2005-)
«BHK» 3.6, 280 л.с. — Touareg (10/2005-)
Двигатели. Рядный? V-образный? «Оппозит»? — ДРАЙВ
В начале XX века, когда конструкторская мысль бушевала вовсю, двигатель рабочим объёмом 10 л мог быть как одноцилиндровым, так, к примеру, и рядной «восьмёркой». Тогда никого особо не удивляли установленная на автомобиле рядная «шестёрка» объёмом 23 л или семицилиндровый звездообразный мотор с аэроплана…
Тогда никого особо не удивляли установленная на автомобиле рядная «шестёрка» объёмом 23 л или семицилиндровый звездообразный мотор с аэроплана…
Однако рост мощностей, оборотов и ожесточенная борьба за снижение себестоимости всё расставили по местам. Простейший одноцилиндровый мотор для автомобилестроителей остался в далёком прошлом. Средний объём цилиндра двигателя обычного автомобиля сейчас — от трёхсот до шестисот кубических сантиметров. Литровая мощность — от 35 л.с./л для безнаддувного дизеля до 100 л.с./л для форсированного бензинового «атмосферника». Для серийных двигателей это оптимум, выходить за рамки которого просто невыгодно.
Очень маленькие цилиндры часто встречаются на японских микролитражках: например, объём рядной «четвёрки» у Subaru R1 — всего 658 см³. Из «европейцев» отличился трёхцилиндровый дизельный Smart — 799 «кубиков». Есть цилиндры-напёрстки и у «корейцев»: трехцилиндровый Matiz — это 796 «кубиков», а четырёхцилиндровый — 995.
Сегодня двигатель мощностью 100 л.с. в большинстве случаев окажется четырёхцилиндровым, у 200-сильного будет четыре, пять или шесть цилиндров, у 300-сильного — восемь… Но как эти цилиндры расположить? Иными словами — по какой схеме строить многоцилиндровый двигатель?
Простота хуже компактности
О чём болит голова у конструктора? Во-первых, о том, как упростить конструкцию двигателя, чтобы он был дешевле в производстве и легче в обслуживании. Самый простой двигатель — рядный (мы будем обозначать такие моторы индексами R2, R3, R4 и т. д.). Располагаем в ряд нужное количество цилиндров — получаем необходимый рабочий объём.
- Двигатель R3 (А).
 Угол между кривошипами — 120°.
Угол между кривошипами — 120°. - Добиться равномерности вспышек в двухцилиндровом двигателе (В) можно только при двухтактном цикле.
- А такой мотор (C), например, стоит на «Оке». Поршни движутся синфазно.
Двух- и трёхцилиндровые двигатели встречаются на автомобилях нечасто, хотя мода на «двухгоршковые» моторчики набирает обороты. Тому способствуют продвинутые системы смесеобразования и применение турбонаддува (как, например, на 85-сильной двухцилиндровой турбоверсии хэтчбека Fiat 500). А вот рядная «четвёрка» попала в самый массовый диапазон рабочего объёма легковых автомобилей — от 1,0 до 2,4 л.
В современных четырёхтактных двухцилиндровых двигателях, вроде турбомотора Фиата 500, проблему вибраций отчасти решает балансирный вал.
Пятицилиндровые рядные моторы появились на серийных автомобилях сравнительно недавно — в середине 70-х годов. Первым был Mercedes-Benz со своими дизельными «пятёрками» — они появились в 1974 году (на модели 300D с кузовом W123). Через два года увидел свет пятицилиндровый двухлитровый бензиновый двигатель Audi. А в конце 80-х годов такие моторы сделали Volvo и FIAT.
Через два года увидел свет пятицилиндровый двухлитровый бензиновый двигатель Audi. А в конце 80-х годов такие моторы сделали Volvo и FIAT.
Рядные «шестёрки», до недавнего времени столь популярные в Европе, нынче во мгновение ока стали вымирающим видом. А про рядную «восьмёрку» и говорить нечего — с ней практически распрощались еще в 30-х годах. Почему?
Ответ прост. С ростом числа цилиндров двигатель становится длиннее, и это создаёт массу неудобств при компоновке. Например, втиснуть поперёк моторного отсека переднеприводного автомобиля рядную «шестёрку» удавалось в считанных случаях — можно припомнить лишь английский Austin Maxi 2200 середины 60-х годов (тогда конструкторам пришлось спрятать коробку передач под двигателем) и Volvo S80 с суперкомпактной коробкой передач.
Два мотора R3, составленные друг за другом, дают великолепный результат — абсолютно уравновешенную рядную «шестёрку».
Как укоротить рядный мотор? Его можно «распилить» пополам, поставить две половинки рядом друг с другом и заставить работать на один коленвал. Такие моторы, у которых цилиндры расположены в виде латинской буквы V, вдвое короче рядных — наибольшее распространение получили двигатели с углом развала блока 60° и 90°. А V-образный мотор с углом развала блока 180°, в котором цилиндры расположены друг против друга, называют оппозитным (или «боксером» — обозначения В2, В4, В6 и т. д. происходят именно от слова boxer).
Такие моторы, у которых цилиндры расположены в виде латинской буквы V, вдвое короче рядных — наибольшее распространение получили двигатели с углом развала блока 60° и 90°. А V-образный мотор с углом развала блока 180°, в котором цилиндры расположены друг против друга, называют оппозитным (или «боксером» — обозначения В2, В4, В6 и т. д. происходят именно от слова boxer).
Такие моторы сложнее рядных — например, у них две головки цилиндров (каждая со своей прокладкой и коллекторами), больше распредвалов, сложнее схема их привода. А оппозитные двигатели ещё и занимают много места в ширину. Поэтому из компоновочных соображений они применяются довольно редко — производителей «боксеров» можно пересчитать по пальцам.
А как сделать V-образный двигатель еще компактнее? Одно из простых, на первый взгляд, решений — установить угол развала блока менее 60°. Действительно, такие моторы были, но редко — можно вспомнить, например, автомобили Lancia Fulvia 70-х годов с моторами V4, угол развала блока которых составлял 23°. Почему же этим не пользовались все? Дело в том, что перед конструктором двигателя всегда стоит ещё одна проблема — вибрации.
Почему же этим не пользовались все? Дело в том, что перед конструктором двигателя всегда стоит ещё одна проблема — вибрации.
О силах и моментах
Вообще без вибраций поршневой двигатель внутреннего сгорания работать не может — так уж он устроен. Но бороться с ними нужно, и не только для повышения комфорта пассажиров. Сильные неуравновешенные вибрации могут вызвать разрушения деталей мотора — со всеми вылетающими и выпадающими оттуда последствиями…
Отчего возникают вибрации? Во-первых, в некоторых схемах двигателей вспышки в цилиндрах происходят неравномерно. Таких схем конструкторы по возможности избегают или стараются делать массивней маховик — это помогает сгладить пульсации крутящего момента. Во-вторых, при движении поршней вверх-вниз они то разгоняются, то замедляются, из-за чего возникают силы инерции — сродни тем силам, что заставляют пассажиров автомобиля кланяться при торможении или вдавливают их в спинки сидений при разгоне. В-третьих, шатун в двигателе движется вовсе не вверх-вниз, а совершает сложное движение. Да и возвратно-поступательное перемещение поршня от верхней мёртвой точки к нижней тоже нельзя описать простой синусоидой.
Да и возвратно-поступательное перемещение поршня от верхней мёртвой точки к нижней тоже нельзя описать простой синусоидой.
- Силы инерции от двух масс, вращающихся на одном валу поодаль друг от друга, создают свободный момент.
- В простейшем моторе есть свободные силы инерции, но нет моментов. Цилиндр-то один.
Поэтому среди сил инерции появляются составляющие с удвоенной, утроенной, учетверённой частотой вращения коленвала… Этими так называемыми силами инерции высших порядков, как правило, пренебрегают — они по сравнению с основной силой инерции (которой присвоили первый порядок) очень малы. Исключение составляют силы инерции второго порядка, с которыми приходится считаться. Плюс к этому, пары сил, приложенные на определённом расстоянии, образуют моменты — так происходит, когда в соседних цилиндрах силы инерции направлены в разные стороны.
Что сделать для того, чтобы уравновесить силы и моменты? Во-первых, можно выбрать схему мотора, в которой цилиндры и кривошипы коленчатого вала расположены таким образом, что силы и моменты взаимно уравновесят друг друга — всегда будут равны и направлены в противоположные стороны.
А если ни одна из уравновешенных схем не подходит — например, из компоновочных соображений? Тогда можно попытаться по-другому расположить шейки коленвала и применить всякого рода противовесы, создающие силы и моменты, равные по величине, но противоположные по направлению основным уравновешиваемым силам. Иногда это можно сделать, разместив противовесы на коленчатом валу мотора. А иногда — на дополнительных валах, которые называют балансирными валами противовращения. Называются они так потому, что крутятся в другую сторону, нежели коленвал. Но это усложняет и удорожает двигатель.
Чтобы облегчить описание степени уравновешенности разных двигателей, мы подготовили сводную таблицу. Зелёным в ней выделены самоуравновешенные силы и моменты, а красным — свободные (те, что не уравновешены и вырываются на свободу — через опоры силового агрегата проходят на кузов автомобиля).
| Степень уравновешенности (зелёная ячейка — уравновешенные силы или моменты, красная — свободные) | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | R2 | R2* | V2 | B2 | R3 | R4 | V4 | B4 | R5 | VR5 | R6 | V6 | VR6 | B6 | R8 | V8 | B8 | V10 | V12 | B12 | |
| Силы инерции первого порядка | |||||||||||||||||||||
| Силы инерции второго порядка | |||||||||||||||||||||
| Центробежные силы** | |||||||||||||||||||||
| Моменты от сил инерции первого порядка | |||||||||||||||||||||
| Моменты от сил инерции второго порядка | |||||||||||||||||||||
| Моменты от центробежных сил | |||||||||||||||||||||
* Поршни в противофазе.
| |||||||||||||||||||||
| ** Уравновешиваются противовесами на коленчатом вале. | |||||||||||||||||||||
Что же получается? Из распространённых типов двигателей абсолютно уравновешенных всего два — это рядная и оппозитная «шестёрки». Теперь понимаете, почему BMW и Porsche так крепко держатся за такие моторы? Ну а о причинах, по которым от них отказываются остальные, мы уже упоминали. Теперь рассмотрим поподробнее остальные схемы.
Шестицилиндровый «оппозитник» водяного охлаждения Porsche. С левой и правой сторон блока в целях экономии стоят одинаковые головки, поэтому цепные приводы распредвалов пришлось устраивать и спереди, и сзади.
Уравновешенные и не очень
Из двухцилиндровых двигателей на автомобилях нынче применяется только один — двухцилиндровый рядный мотор с коленчатым валом, у которого кривошипы направлены в одну сторону (такой, например, стоял на отечественной «Оке»). Как видно, этот двигатель по степени уравновешенности похож на одноцилиндровый, поскольку оба поршня движутся вверх и вниз одновременно, в фазе. Для того чтобы уравновесить свободные силы инерции первого порядка, в моторе «Оки» слева и справа от коленвала применялись два вала с противовесами. А как же быть с силами второго порядка? Для того чтобы с ними справиться, пришлось бы добавить ещё два балансирных вала, что на двухцилиндровом моторе, изначально предназначенном для маленьких и дешёвых автомобилей, было бы совершенно неуместным.
Впрочем, это ещё ничего — много двухцилиндровых моторов выпускалось вообще без балансирных валов. Так было, например, на малышках Fiat 500 образца 1957 года. Да, вибрации были, их старались погасить подвеской силового агрегата… Но мотор зато получался простым и дешёвым! Дешевизна двухцилиндровых двигателей соблазняет разработчиков и сегодня: не зря же эту схему использовали создатели самого доступного автомобиля планеты, индийского хэтчбека Tata Nano.
Машин с оппозитной «двойкой» — по экономическим и компоновочным соображениям — было немного. Можно упомянуть, например, французский Citroen 2CV.Двухцилиндровый двигатель, у которого кривошипы направлены в разные стороны (под углом 180°), можно встретить сегодня только на мотоциклах. Поскольку поршни в нём всегда движутся в противофазе, то он уравновешен лучше. Однако равномерного чередования вспышек в цилиндрах можно добиться только на двухтактных моторах — такие двигатели устанавливались на довоенные DKW и их прямых наследников, пластиковые гэдээровские Трабанты. По причине простоты и дешевизны никаких балансирных валов на них тоже не было, а с возникающими вибрациями просто мирились.
Автомобиль с двухцилиндровым V-образным мотором припоминается только один — отечественный НАМИ-1. А до наших дней этот тип двигателя дожил только на мотоциклах — вспомните американский Harley Davidson и его японских последователей с их V-образными «двойками» во всей хромированной красе. Такой мотор можно уравновесить практически полностью с помощью противовесов на коленчатом валу, но достичь равномерного чередования вспышек невозможно. Хорошо, что байкеры особого внимания на вибрации не обращают…
НАМИ-1 — прототип 1927 года.
Трёхцилиндровый двигатель уравновешен хуже, чем рядная «четвёрка», и поэтому производители трёхцилиндровых моторов — например, Subaru и Daihatsu — стараются оснащать их балансирными валами. В своё время опелевские двигателисты решили отказаться от балансирного вала, разрабатывая трёхцилиндровый мотор семейства Ecotec для Корсы второго поколения — в целях удешевления и уменьшения механических потерь. И трёхцилиндровая Corsa после дебюта в 1996-м была раскритикована немецкими автожурналистами: «По городу на переменных режимах ездить совершенно невозможно».
В самой популярной среди двигателистов рядной «четвёрке» остаётся свободной сила инерции второго порядка. Её можно уравновесить только балансирным валом, вращающимся с удвоенной скоростью. (Вы не забыли — сила инерции второго порядка действует с удвоенной частотой?) А для компенсации момента от балансирного вала придётся ставить ещё один, вращающийся в противоположную сторону. Дорого? Безусловно. Однако моторы с балансирными валами можно встретить на автомобилях Mitsubishi, Saab, Ford, Fiat и самых разных марок концерна Volkswagen.
Пример рядной «четвёрки» с балансирными валами — двухлитровый двигатель Audi. Валы располагаются по обе стороны от коленвала и с удвоенной скоростью вращаются в противоположные стороны. Здесь балансирные валы расположены снизу и соединены зубчатой передачей, а раньше (как, например, на приведённом на картинке внизу двигателе Saab 2.3) их располагали сверху и у каждого был свой шкив цепного привода.
Кстати, оппозитная «четвёрка» уравновешена лучше, чем рядная, — здесь есть только момент от сил инерции второго порядка, который стремится развернуть двигатель вокруг вертикальной оси. Однако и «оппозитник» воздушного охлаждения легендарного «Жука», и знаменитые «боксеры» Subaru обходились и обходятся без балансирных валов.
Subaru из компоновочных соображений предпочитает рядной «четвёрке» оппозитную. Что до вибраций, то силы инерции второго порядка у «боксера» уравновешены, но момент от них всё же остаётся свободным.
У рядных «пятёрок» с уравновешенностью дела обстоят не очень. Силы инерции компенсируются, но вот моменты от этих сил… Во время работы двигателя по блоку постоянно «пробегает» волна изгибающего момента, поэтому блок должен быть весьма жёстким. Однако и Mercedes-Benz, и Audi, и Volvo борются с вибрациями, дорабатывая подвеску силового агрегата или применяя специальные противовесы (как у наддувной «пятёрки» 2.5 TFSI на Audi TT RS). И только фиатовские мотористы применяли балансирный вал, который полностью уравновешивал все моменты.
- На картинке FIAT JTD от хэтчбека Croma — потомок пятицилиндрового турбодизеля Fiat TD 125 объёмом 2387 см³, образованного путём добавления одного цилиндра к 1,9-литровой «четвёрке» TD 100. Балансирный вал — слева, в нижней части картера.
- Под каким углом расположить кривошипы коленвала рядной «пятёрки»? 360° делим на пять… Правильно — 72°!
Кстати, практически все «пятёрки» образованы путём прибавления ещё одного цилиндра к четырёхцилиндровому двигателю — как кубики в конструкторе. Делают это для того, чтобы с минимальными производственными и конструкторскими затратами получить более мощные моторы. При этом всю начинку, включая поршни, шатуны, клапаны и т. д., можно взять от «четвёрки». Понадобятся иные блок и головка цилиндров и, само собой, коленчатый вал, кривошипы которого должны быть расположены под углом в 72°.
О шестицилиндровых моторах — мечте с точки зрения уравновешенности — мы уже упоминали. А вот в моторах V6, которые вытесняют рядные «шестёрки», ситуация с уравновешенностью такая же, как у «трёшки», то есть не ахти. Поэтому, например, балансирным валом в развале блока цилиндров был оснащён самый первый двигатель V6 фирмы Mercedes-Benz — заслуженный М112 с тремя клапанами на цилиндр. У трёхлитровой «шестёрки» концерна PSA вал находился в одной из головок блока. На других моторах того времени инженеры пытались не усложнять конструкцию и старались свести уровень вибраций к минимуму за счёт усовершенствованной подвески силового агрегата и хитроумного смещённого расположения шатунных шеек коленчатого вала (как, например, на Audi V6).
- В моторе V6 с углом развала блока 90° сдвоенные кривошипы расположены под углом 120°. А в моторах с развалом 60° каждый шатун приходится устанавливать на своём кривошипе.
- Для уравновешивания свободного момента от сил второго порядка мотору V6 90° необходим один балансирный вал (показан стрелкой). В двигателе Citroen 3.0 V6 он был установлен в одной из головок блока.
У новейших мерседесовских двигателей V6 угол развала блока сократился до 60°, в результате чего необходимость в балансирном вале отпала.
Добавим сюда ещё одно замечание — в моторах V6 с развалом в 90° не обеспечивается равномерное чередование вспышек в цилиндрах. Возникающая неравномерность хода может компенсироваться за счёт утяжелённого маховика, но лишь отчасти. Вот вам и ещё один источник вибраций…
Двигатели V8 с углом развала цилиндров в 90° и коленвалом, кривошипы которых располагаются в двух взаимно перпендикулярных плоскостях, весьма неплохо уравновешены. В таком моторе можно обеспечить равномерное чередование вспышек, что тоже работает на плавность хода. Остаются неуравновешенными два момента, которые можно полностью утихомирить с помощью двух противовесов на коленчатом валу — на щеках крайних цилиндров. Понимаете, почему американцы раньше других прочувствовали всю прелесть V-образных моторов? Вибрации и тряски в своих автомобилях они очень не любят…
Двигатель V8: и развал блока, и угол между кривошипами — 90°.
Напоследок можно поговорить о схемах необычных. Сначала вспомнить о моторах V4. Таких было немного — европейский Ford образца 60-х годов (который стоял на автомобилях Ford Taunus, Capri и Saab 96) да чудо-двигатель отечественного «Запорожца». Здесь не обошлось без уравновешивающего вала для момента от сил инерции первого порядка. Впрочем, конструкторы вышеупомянутых автомобилей выбирали эту схему из условий компактности и отчасти экономии, а не за хорошую уравновешенность.
- Ford и ЗАЗ выбрали экзотику: мотор V4, в котором и угол развала блока, и угол между кривошипами составляют 90°.
- Угол развала цилиндров моторов V2 колеблется от 25° до 90°.
А что насчёт V-образных «десяток»? Как можно видеть, степень уравновешенности таких моторов точно такая же, как и у моторов R5. Впрочем, конструкторы прежних моторов Формулы-1 или монстров Dodge Viper и Dodge RAM, где стоят двигатели V10, о вибрациях думали далеко не в первую очередь.
Как жаль, что Viper и его коллосальный V10 — уже история.
Двигателями V10 отметилась целая череда знаковых машин: BMW M5, Audi S6 и S8, а также RS6 с наддувной «десяткой». Не говоря уже об автомобилях Lamborghini. Наконец, Lexus LFA тоже оснащается двигателем V10.Ну а прочие схемы легко свести к предыдущим. Например, оппозитная «восьмёрка» (пример применения — гоночные болиды Porsche 917) — это две «четвёрки», работающие на один коленвал. А V-образный и оппозитный двенадцатицилиндровые двигатели можно свести к двум рядным «шестёркам».
VR6, VR5, W12…
Помните, мы упоминали о V-образных моторах с малым углом развала блока — как на Лянчах? Раньше таких схем избегали — уравновесить их сложнее, чем моторы с развалом в 60° или 90°, а выигрыш в компактности тогда ценили не так…
Но теперь ситуация изменилась. Во-первых, повсеместно применяются гидроопоры силового агрегата, которые значительно ослабляют вибрации. Во-вторых, пространство под капотом нынче на вес золота. Ведь кто раньше мог себе представить скромный хэтчбек с 2,8-литровым мотором? А теперь — пожалуйста! Всё началось с Фольксвагена Golf VR6 третьего поколения.
Знаменитый фольксвагеновский двигатель VR6, «V-образно-рядный» мотор (об этом и говорит обозначение VR), стал дальнейшим развитием V-образных двигателей с малым углом развала блока. Цилиндры этого мотора разведены на ещё меньший угол, чем на Лянчах, — всего на 15°. Угол настолько мал, что такой мотор называют ещё «смещённо-рядным». Гениальное решение — «шестёрка» 2.8 компактнее, чем обычный мотор V6, да ещё и имеет одну головку блока! Потом появился двигатель VR5 — это VR6, от которого «отрезали» один цилиндр. После этого мотористы концерна Volkswagen вообще словно с цепи сорвались.
Двигатель VR5 2.3 конструкторы Фольксвагена получили, отняв один цилиндр от мотора VR6. Угол развала компактного блока — 15°, все пять цилиндров укрыты одной головкой блока.
Они придумали суперкомпактный двигатель W12, который дебютировал в 1998 году на концепт-каре W12 Roadster. Это два двигателя VR6, установленные под углом 72° на одном коленвале. Но прежде в серию пошёл мотор W8, которым оснащалась топ-модель седана Passat. Там тоже два мотора VR6, от которых «отрезано» по два цилиндра и которые тоже объединены в одном блоке на одном коленвале. Когда-то в Вольфсбурге подумывали и о восемнадцатицилиндровом двигателе — но в итоге остановились на W16 с четырьмя турбокомпрессорами, который разгоняет Bugatti Veyron до 431 км/ч.
Супермотор W12, показанный на концепте имени себя, приводит в движение представительские модели фирм Audi, Volkswagen и Bentley. На фото хорошо видно шахматное расположение цилиндров пары блоков, объединённых в одной отливке под углом 72°. Длина 420-сильного мотора — всего 51 см, ширина — 70 см.
Почему же таких моторов не было раньше? Взгляните, к примеру, на коленвал двигателя W12 — такое технологу и в страшном сне не приснится! Создателям новых схем должен помогать компьютер. Чтобы просчитать все варианты угла развала блока, расположения шатунных шеек, порядка вспышек в цилиндрах и выбрать самый уравновешенный, без помощи вычислительных мощностей обойтись очень сложно.
Теория и практика
Как видно, при выборе схемы силового агрегата конструкторы ставят во главу угла вовсе не степень уравновешенности. Главное — это удачно вписать в моторный отсек такой двигатель, который будет обладать наилучшим соотношением массы, размеров и мощности. Потом, двигатели сейчас всё чаще строятся по модульному принципу. Говоря упрощённо, на одной поршневой группе можно построить любой мотор — и трёхцилиндровый, и W12. Вслед за Фольксвагеном на модульные конструкции переходит всё больше производителей. Новейшая линейка моторов Mercedes — тому отличное подтверждение.
А вибрации… Во-первых, следует различать теоретическую и действительную уравновешенность двигателя. Если коленчатый вал в сборе с маховиком не отбалансирован, а поршни и шатуны заметно отличаются по массе, то трясти будет даже рядную «шестёрку». А потом, действительная уравновешенность всегда значительно хуже теоретической — по причинам отклонения деталей от номинальных размеров и из-за деформации узлов под нагрузкой. Так что вибрации «прорываются» из двигателя наружу при любой схеме. Поэтому автомобильные инженеры и уделяют такое внимание подвеске силового агрегата. На самом деле конструкция и расположение опор двигателя — не менее важный фактор, чем степень уравновешенности самого мотора…
Материал адаптирован к публикации с разрешения ООО «Газета «Авторевю». Все права на перепечатку принадлежат Авторевю.
самый совершенный V6 в истории INFINITI
Гонконг – Infiniti представляет легкий и компактный битурбированный двигатель V6 объемом 3,0 л. Это самый технологичный и современный V6 за всю историю компании: приемистый, экономичный и мощный.
3,0-литровый битурбированный V6 входит в совершенно новое семейство эксклюзивных двигателей VR Infiniti. Эта серия моторов является свидетельством технического совершенства Infiniti в производстве моторов. Уровень выходной мощности и крутящего момента нового мотора превосходит показатели всех предшествующих силовых агрегатов Infiniti такого типа.
Двигатель будет представлен на рынках в двух вариантах мощности – 300 л.с. или 400 л.с., причем европейским и российским покупателям будет доступна только самая мощная версия.
Самый технологичный двигатель V6 в истории Infiniti
Отличительными чертами нового мотора семейства VR является захватывающее сочетание приемистости, экономичности и динамики. Двигатели VR предназначены для использования в новейших моделях Infiniti, которые были созданы с учетом потребностей клиентов на всех мировых рынках. Это в очередной раз подчеркивает глобальный подход бренда.
Создавая новейший битурбированный V6, компания смогла опереться на богатый опыт разработки шестицилиндровых силовых агрегатов. Двигатели V6 из предыдущего семейства VQ устанавливались на автомобили Infiniti с 1994 года и были отмечены множеством наград.
На протяжении 14 лет, с 1995 по 2008 год, двигатели VQ входили в топ-10 лучших двигателей по версии журнала Ward Auto.
Новые технологии – залог лучшей в классе выходной мощности и экономичности
Более мощная версия развивает 400 л.с. (298 кВт) при 6400 об/мин и 475 Н·м при 1600-5200 об/мин. Менее мощная — достигает максимальной мощности в 300 л.с. при 6400 об/мин, а крутящий момент 400 Н·м доступен в диапазоне от 1600 до 5200 об/мин.
Ряд современных технологий позволил инженерам Infiniti добиться впечатляющих показателей. Одно из инновационных решений – улучшенная система управления газораспределением (Advanced timing control), которая повышает скорость отклика двигателя, позволяя автомобилю быстрее реагировать на действия водителя.
DIA18 Микропланетарный | Передаточное отношение: 1/4 — 1/11952 Размер: 18,0 x 61,0 — 88,0 мм, диаметр вала 4 мм 1 этап: 1/4, 1 / 5,3 2 этапа: 1/16, 1/21 3 этапа: 1/62, 1/70, 1/80, 1/94 4 ступени: 1/243, 1/277, 1/316, 1/360, 1/424, 1/590 5 ступеней: 1/958, 1/1246, 1/1420, 1/1909, 1/2252 6 ступеней: 1/3783, 1/5604, 1/7284, 1/9196, 1/11952 Диапазон напряжения: 6,0 — 28,0 В Выходная скорость: 0,3 — 2500 об / мин Металлическая или пластиковая шестерня на выбор. Нет тормозов, подходящих для комбинации планетарных передач P18. Нет оптических датчиков для комбинации с планетарной передачей P18. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | DIA22 Миниатюрный трубчатый мотор | Передаточное отношение: 1/4 — 1/424 Размер: 22,0 x 45,0 — 61,4 мм, диаметр вала 4 мм 1 этап: 1/4 2 этапа: 1/16, 1/18, 1/21 3 этапа: 1/62, 1/70, 1/80, 1/94 4 этап: 1/243, 1/277, 1/316, 1/360, 1/424 Диапазон напряжения: 6,0 — 28,0 В Выходная скорость: 3 — 3000 об / мин Металлическая шестерня и пластиковая шестерня. Вариант с фланцем Faulhaber Maxon. Нет тормозов, подходящих для комбинации планетарных шестерен P22 Нет оптических датчиков для комбинации с планетарной передачей P22 Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | Планетарный двигатель DIA22-L42 | Передаточное отношение: 1/4 — 1/424 Размер: 22 x 58 — 74 мм, диаметр вала 4 мм 1 этап: 1/4 2 этапа: 1/16, 1/18, 1/21 3 этапа: 1/62, 1/70, 1/80, 1/94 4 этап: 1/243, 1/277, 1/316, 1/360, 1/424 Диапазон напряжения: 6,0 — 28,0 В Выходная скорость: 3 — 3000 об / мин Металлическая шестерня и пластиковая шестерня. Вариант с фланцем Faulhaber Maxon Никаких тормозов, подходящих для комбинации планетарных передач P22. Нет оптических датчиков, подходящих для комбинации планетарных шестерен P22. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | Планетарный двигатель с низким уровнем шума DIA26 | Передаточное отношение: 1/4 — 1/410 Размер: 27,5 x 64,1 — 84,7 мм, диаметр вала 5 мм 1 этап: 1/4, 1 / 4,5, 1 / 5,7 2 ступени: 1/16, 1 / 22,7, 1 / 25,5, 1 / 32,1 3 этапа: 1/64, 1/81, 1/102, 1/128, 1/182 4 ступени: 1/256, 1/365, 1/410, 1/459, 1/516, 1/577, 1/819, 1/1031 Диапазон напряжения: 6,0 — 28,0 В Выходная скорость: 5 — 3000 об / мин Металлическая шестерня и пластиковая шестерня. Вариант с фланцем Faulhaber Maxon Portescap Flange Никаких тормозов, подходящих для комбинации планетарных передач P26. Нет оптических датчиков, подходящих для комбинации планетарных шестерен P26. Магнитные датчики подходят для комбинации. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | DIA26 Мощный трубчатый мотор | Передаточное отношение: 1/4 — 1/410 Размер: 37,5 x 74,7 — 98,1 мм, диаметр вала 5 мм 1 этап: 1/4, 1 / 4,5, 1 / 5,7 2 ступени: 1/16, 1 / 22,7, 1 / 25,5, 1 / 32,1 3 этапа: 1/64, 1/81, 1/102, 1/128, 1/182 4 ступени: 1/256, 1/365, 1/410, 1/459, 1/516, 1/577, 1/819, 1/1031 Диапазон напряжения: 6,0 — 28,0 В Выходная скорость: 10 — 3000 об / мин Металлическая шестерня и пластиковая шестерня. Вариант с фланцем Faulhaber Maxon Portescap Flange Никаких тормозов, подходящих для комбинации планетарных передач P26. Нет оптических датчиков, подходящих для комбинации планетарных шестерен P26. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | Двигатель DIA32 Low Noise Planet | Передаточное отношение: 1/3 — 1/516 Размер: диаметр 32 x 52 — 75 мм, диаметр вала 6 мм 1 этап: 1/4, 1 / 4,5, 1 / 5,7 2 ступени: 1/16, 1 / 22,7, 1 / 25,5, 1 / 32,1 3 этапа: 1/64, 1/81, 1/102, 1/128, 1/182 4 ступени: 1/256, 1/365, 1/410, 1/459, 1/516, 1/577, 1/819, 1/1031 Диапазон напряжения: 6,0 — 28,0 В Выходная скорость: 5 — 4000 об / мин Металлический или пластиковый вариант шестерни. Вариант с фланцем Faulhaber OR Maxon OR Portescap Нет тормозов, подходящих для комбинации планетарных передач P32. Нет оптических датчиков, подходящих для комбинации планетарных шестерен P32. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | DIA37 малошумный планетарный мотор | Передаточное отношение: 1/3 — 1 / 931,5 1 этап: 1 / 3,2 2 ступени: 1 / 12,8, 1 / 17,2, 1 / 21,4 3 ступени: 1 / 50,5, 1 / 67,9, 1 / 84,4, 1 / 91,3, 1 / 113,5, 1 / 141,1 4 ступени: 1 / 199,3, 1 / 268,0, 1 / 360,3, 1 / 484,5, 1 / 602,4, 1 / 749,1, 1 / 931,5 Размер: диаметр 37,5 x 74,7 — 98,1 мм, диаметр вала 5 мм Диапазон напряжения: 6,0 — 28,0 В Выходная скорость: 10 — 3000 об / мин Металлический или пластиковый вариант шестерни. Вариант с фланцем Faulhaber Maxon Portescap Flange Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | Двигатель DIA37 Quiet Planet | Передаточное отношение: 1/3 — 1 / 931,5 Размер: диаметр 37,5 x 74,7 — 98,1 мм, диаметр вала 8 мм 1 этап: 1 / 3,2 2 ступени: 1 / 12,8, 1 / 17,2, 1 / 21,4 3 ступени: 1 / 50,5, 1 / 67,9, 1 / 84,4, 1 / 91,3, 1 / 113,5, 1 / 141,1 4 ступени: 1 / 199,3, 1 / 268,0, 1 / 360,3, 1 / 484,5, 1 / 602,4, 1 / 749,1, 1 / 931,5 Диапазон напряжения: 6,0 — 28,0 В Выходная скорость: 10 — 3000 об / мин Металлический или пластиковый вариант шестерни. Вариант с фланцем Faulhaber Maxon Portescap Flange. Оптические или магнитные датчики подходят для комбинации. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | DIA37 Strong Vr. Планетный мотор | Передаточное отношение: 1/3 — 1 / 931,5 Размер: диаметр 37,5 x 74,7 — 98,1 мм, диаметр вала 8 мм 1 этап: 1 / 3,2 2 ступени: 1 / 12,8, 1 / 17,2, 1 / 21,4 3 ступени: 1 / 50,5, 1 / 67,9, 1 / 84,4, 1 / 91,3, 1 / 113,5, 1 / 141,1 4 ступени: 1 / 199,3, 1 / 268,0, 1 / 360,3, 1 / 484,5, 1 / 602,4, 1 / 749,1, 1 / 931,5 Диапазон напряжения: 6,0 — 28,0 В Выходная скорость: 10 — 3000 об / мин Металлический или пластиковый вариант шестерни. Вариант с фланцем Faulhaber Maxon Portescap Flange. Оптические или магнитные датчики подходят для комбинации. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | DIA43 Матовый двигатель с длительным сроком службы | Передаточное отношение: 1/4 — 1/864 Размер: 43 x 90 — 114 мм, диаметр вала 8 мм 1 этап: 1/4 2 этапа: 1/14, 1/17, 1/24 3 этапа: 1/49, 1/60, 1/75, 1/84, 1/144 4 ступени: 1/172, 1/212, 1/294, 1/364, 1/504, 1/624, 1/864 Диапазон напряжения: 6,0 — 28,0 В Выходная скорость: 10 — 3000 об / мин Металлический или пластиковый вариант шестерни. Оптические или магнитные датчики подходят для комбинации. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | Square 43 Strong планетарный двигатель | Передаточное отношение: 1/4 — 1/864 Размер: 43 x 90 — 114 мм, диаметр вала 8 мм 1 этап: 1/4 2 этапа: 1/14, 1/17, 1/24 3 этапа: 1/49, 1/60, 1/75, 1/84, 1/144 4 ступени: 1/172, 1/212, 1/294, 1/364, 1/504, 1/624, 1/864 Диапазон напряжения: 6,0 — 28,0 В Выходная скорость: 10 — 3000 об / мин Металлический или пластиковый вариант шестерни. Вариант Nema 17 Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | DIA43 Turbo Vr. Планетный мотор | Передаточное отношение: 1/4 — 1/864 Размер: 43 x 90 — 114 мм, диаметр вала 8 мм 1 этап: 1/4 2 этапа: 1/14, 1/17, 1/24 3 этапа: 1/49, 1/60, 1/75, 1/84, 1/144 4 ступени: 1/172, 1/212, 1/294, 1/364, 1/504, 1/624, 1/864 Диапазон напряжения: 12 В, 24 В, 36 В Выходная скорость: 10 — 3000 об / мин Металлический или пластиковый вариант шестерни. Нема 17 Вариант. Оптические или магнитные датчики подходят для комбинации. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | DIA43 DC с сильным планетарным редуктором | Передаточное отношение: 1/4 — 1/864 Размер: 43 x 90 — 114 мм, диаметр вала 8 мм 1 этап: 1/4 2 этапа: 1/14, 1/17, 1/24 3 этапа: 1/49, 1/60, 1/75, 1/84, 1/144 4 ступени: 1/172, 1/212, 1/294, 1/364, 1/504, 1/624, 1/864 Диапазон напряжения: 12 В, 24 В, 36 В Выходная скорость: 10 — 3000 об / мин Металлический или пластиковый вариант шестерни. Нема 17 Вариант. Оптические или магнитные датчики подходят для комбинации. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | DIA43 Серводвигатель Коробка передач | Передаточное отношение: 1/4 — 1/864 Размер: 43 x 90 — 114 мм, диаметр вала 8 мм 1 этап: 1/4 2 этапа: 1/14, 1/17, 1/24 3 этапа: 1/49, 1/60, 1/75, 1/84, 1/144 4 ступени: 1/172, 1/212, 1/294, 1/364, 1/504, 1/624, 1/864 Диапазон напряжения: 6,0 — 28,0 В Выходная скорость: 10 — 3000 об / мин Металлический или пластиковый вариант шестерни. Нема 17 Вариант. Оптические или магнитные датчики подходят для комбинации. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | DIA52 сервопривод с долгим сроком службы планетарный двигатель | Передаточное отношение: 1/4 — 1/312 Размер: 52 мм x 153 мм ~ 184 мм 1 этап: 1/4, 1 / 6,25, 1/8 2 этапа: 1/16, 1/25, 1/36, 1/50 3 этапа: 1/64, 1/81, 1/100, 1/128, 1/144, 1/176, 1/200, 1/225, 1/244, 1/312 Диапазон напряжения: 12 В, 24 В, 36 В Выходная скорость: 10 — 3000 об / мин Металлическая шестеренка. Нема 34 Вариант. Оптические или магнитные датчики подходят для комбинации. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | DIA52 Strong планетарный мотор-редуктор | Передаточное отношение: 1/4 — 1/244 Размер: 52 мм x 135 мм ~ 166 мм 1 этап: 1/4, 1 / 6,25 2 этапа: 1/16, 1/25, 1/39 3 этапа: 1/64, 1/81, 1/100, 1/127, 1/176, 1/244 Диапазон напряжения: 12 В, 24 В, 36 В Выходная скорость: 10 — 3000 об / мин Металлическая шестеренка. Нема 34 Вариант. Оптические или магнитные датчики подходят для комбинации. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | Мотор-редуктор тихой планеты DIA54 | Передаточное отношение: 1/4 — 1/864 Размер: 54 x 140 — 164 мм, диаметр вала 8 мм 1 этап: 1/4 2 этапа: 1/14, 1/17, 1/24 3 этапа: 1/49, 1/60, 1/75, 1/84, 1/144 4 ступени: 1/172, 1/212, 1/294, 1/364, 1/504, 1/624, 1/864 Диапазон напряжения: 12 В, 24 В, 36 В Выходная скорость: 10 — 3000 об / мин Металлический или пластиковый вариант шестерни. Нема 17 Вариант. Оптические или магнитные датчики подходят для комбинации. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | Редукторный двигатель Strong Planet DIA65 | Передаточное отношение: 1/4 — 1/244 1 этап: 1/4, 1 / 6,25 2 этапа: 1/16, 1/25, 1/39 3 этапа: 1/64, 1/81, 1/100, 1/127, 1/176, 1/244 Диапазон напряжения: 12 В — 36 В Выходная скорость: 10 — 3000 об / мин Металлическая шестеренка. Нема 23 Вариант. Оптические или магнитные датчики подходят для комбинации. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | Планетарный двигатель постоянного тока DIA80 с щеточным покрытием | Передаточное отношение: 1/4 — 1/244 1 этап: 4, 6,25, 2 этапа: 16, 25, 39 3 ступени: 64, 81, 100, 127, 176, 244 Диапазон напряжения: 12 В, 24 В, 36 В Выходная скорость: 5 — 1000 об / мин Металлическая шестеренка. Оптические или магнитные датчики подходят для комбинации. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | Планетарный двигатель постоянного тока DIA80 TURBO | Передаточное отношение: 1/4 — 1/244 1 этап: 4, 5 2 этапа: 16, 20, 25 3 ступени: 64, 80, 100, 125 (68L) 4 ступени: 256, 320, 400, 500, 625 (82 л) Диапазон напряжения: 12 В, 24 В, 36 В Выходная скорость: 5 — 1000 об / мин Металлическая шестеренка. Оптические или магнитные датчики подходят для комбинации. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | DIA124 Мощный планетарный двигатель | Передаточное отношение: 1 / 7,5, 1/10 Диапазон напряжения: 12 В, 24 В Выходная скорость: 100 — 550 об / мин Металлическая шестеренка. Оптические или магнитные датчики подходят для комбинации. Кривые производительности крутящего момента, тока и скорости будут приложены как образец запроса. | Больше | Щеточный двигатель постоянного тока DIA21 MINI | СПЕЦИАЛЬНЫЙ ДИЗАЙН ДЛЯ ТРУБ Размер: 21,3 x 29,2 мм, диаметр вала 2 мм Диапазон напряжения: 6 В — 36 В Выходная скорость: 1500-8000 об / мин Вариант кодировщика. | Больше | DIA21 БОЛЬШЕ Vr. Трубчатый двигатель | СПЕЦИАЛЬНЫЙ ДИЗАЙН ДЛЯ ТРУБ Размер: 21,3 x 40,2 мм, диаметр вала 2 мм Диапазон напряжения: 6 В — 36 В Выходная скорость: 1000-8000 об / мин Вариант кодировщика. | Больше | Мотор с плоской щеткой DIA35 | Мотор с низким уровнем шума. Размер: диаметр 34,5 x 25 мм, диаметр вала 2,5 мм Диапазон напряжения: 6 В, 12 В, 24 В, 36 В Выходная скорость: 1000-8000 об / мин Вариант кодировщика. | Больше |
Ростех внедряет технологию VR в российском двигателестроении
Объединенная двигателестроительная корпорация (входит в Госкорпорацию Ростех) и ООО «Саровский Инженерный Центр» реализуют проект по интеграции технологии VR в работу с «цифровыми двойниками». Внедрение комбинированной системы позволит сократить сроки проектирования и испытания двигателей, повысить их надежность и снизить затраты на обслуживание в течение жизненного цикла.
Пилотный проект по интеграции технологии VR при создании «цифрового двойника» газотурбинного двигателя реализуется в рамках партнерства ОКБ им. А. Люльки (филиал ПАО «ОДК-УМПО») и ООО «Саровский Инженерный Центр».
«Цифровой двойник» – виртуальная модель изделия, которая постоянно корректируется по результатам натурных экспериментов и достоверно предсказывает его поведение в течение всего жизненного цикла. В ОДК «цифровые двойники» используются, в частности, при проектировании, производстве, эксплуатации двигателей SaM146, ПД-14, перспективного двигателя большой тяги ПД-35, морских газотурбинных двигателей, двигателя для Су-57.
Использование технологии VR решает вопросы визуализации данных, получаемых при использовании «цифровых двойников», делает работу с ними более эффективной и доступной как для конструкторов, так и эксплуатантов.
Цифровизация всех этапов жизненного цикла продукта становится ключевым фактором конкурентоспособности. Мы совершенствуем технологии «цифровых двойников» за счет интеграции VR, сенсорных комплексов на основе интернета вещей, облачных вычислений.Олег Евтушенко, исполнительный директор Госкорпорации Ростех
«Цифровизация всех этапов жизненного цикла продукта становится ключевым фактором конкурентоспособности. Мы совершенствуем технологии «цифровых двойников» за счет интеграции VR, сенсорных комплексов на основе интернета вещей, облачных вычислений. Эта работа позволяет сокращать сроки вывода продукта на рынок, снижать стоимость разработки и запуска серийного производства, а также уменьшать эксплуатационные расходы. Вся современная продукция конструкторских бюро предприятий ОДК к настоящему времени уже полностью оцифрована», – сообщил исполнительный директор Госкорпорации Ростех Олег Евтушенко.
На этапе проектирования технологии VR позволяют быстро выявлять и исправлять ошибки в геометрии деталей, оптимизируя и верифицируя математические модели, используемые в составе «цифрового двойника». В ходе эксплуатации виртуальная графическая среда обеспечивает возможность оперативного анализа расчетных и фактических данных состояния двигателя. Это позволяет выявлять риски потенциальных неисправностей и аварий, а также сокращать затраты на регламентное обслуживание.
VTS представляет новый двигатель для Volcano VR MINI EC
VTS представляет новый двигатель для Volcano VR MINI EC
VTS представляет новый двигатель для Volcano VR MINI EC.
С начала сентября 2018г.
Начиная с серийного номера 18/15000, все тепловентиляторы VR MINI EC будут оснащены новым решением.
Преимущества нового варианта двигателя волкано ЕС мини:
|
Функция |
Преимущества |
|
Двигатель запускается сигналом +10В постоянного тока. |
Возможен запуск двигателя на максимальной скорости без дополнительного регулятора оборотов (потенциометра или HMI). |
|
Усиление защиты с IP44 до IP54. |
Большая герметичность двигателя – способность работать в более сложных условиях. |
|
Двигатель оснащен подписанными клеммами. |
Снижение числа неправильных подключений за счет ясного описания. Пользователь не имеет доступа к внутренней части двигателя. |
|
Меньший размер двигателя. |
Меньшая упаковка для тепловентилятора VR MINI EC. На 1 паллете можно расположить 12 VR MINI EC. |
Клеммы будут дополнительно маркированы цветом для правильного подключения и однозначно подписаны, как показано ниже:
Просим наших клиентов, при подключении двигателей ЕС – внимательно проверять серийный номер агрегатов, при серийном номере после 18/15000 – следует руководствоваться новой схемой подключения, особенно при интеграции (добавлении) Новых волкано ЕС в существующую систему.
Также с начала сентября будет доступен дополнительный агрегат – VOLCANO VR-D MINI EC. Меньший вентилятор дестратификации будет оснащен новейшим двигателем. Ниже представлены технические данные для VR-D MINI EC:
|
Параметр |
|
VOLCANO VR-D |
|
Максимальный расход воздуха |
м3/ч |
2330 |
|
Максимальная длина горизонтального потока |
м |
16 |
|
Максимальная длина вертикального потока |
м |
10 |
|
Вес устройства |
кг |
8 |
|
Напряжение питания |
В/Гц |
1~230/50 |
|
Мощность EC-двигателя |
кВт |
0,095 |
|
Номинальный ток EC-двигателя |
А |
0,51 |
|
Номинальная скорость вращения EC-двигателя |
об/мин |
1200 |
|
Степень защиты EC |
IP |
54 |
Оставайтесь в тепле с Волкано / Новые тепловентиляторы Волкано
Двигатель Волкано мини ЕС с новыми двигателями запускается на максимальных оборотах от втроенного сигнала +10В постоянного тока.
Сравнение программных движков виртуальной реальности
Немногие рынки настолько популярны, как виртуальная реальность (VR). Apple, Microsoft, Google, Facebook и другие внедряют VR или его аналоги — дополненную реальность (AR) и смешанную реальность (MR).
Когда потребители и корпорации смотрят на виртуальную реальность, их внимание обычно обращается на оборудование: разрешение гарнитуры, датчики масштабирования комнаты, ручные контроллеры и тому подобное. Но если вы хотите интегрировать виртуальную реальность в рабочий процесс своей компании, программный движок, который им управляет, не менее важен, чем оборудование, на котором оно работает.
Несмотря на то, что на сегодняшнем рынке существует несколько различных программных движков, два тяжеловеса — это Unreal и Unity. Имея установленный послужной список, легионы пользователей и поклонников, широкую поддержку на нескольких платформах, поддержку всего основного оборудования виртуальной реальности и разумные условия лицензирования, эти два движка находятся в постоянной битве за господство. Что выбрать? Давайте посмотрим на эти два двигателя и посмотрим, что они могут предложить.
Запросите демо сегодня.
Узнайте, как Apex ™ может управлять вашим контентом XR в глобальном масштабе с помощью одного облачного решения.
Единство
Unity была впервые представлена в 2005 году и быстро завоевала популярность как одна из ведущих игровых платформ. Заявленная цель Unity — «демократизировать разработку игр», и каждое решение о том, как работает движок, является ее отражением: хорошо или плохо.
Ничто так не иллюстрирует этот выбор дизайна, как то, как Unity обрабатывает программирование.Хотя сама Unity написана на C ++, разработчики получают доступ к ней и взаимодействуют с ней через C # и JavaScript. C # и JavaScript являются относительно простыми для изучения языками и, как следствие, имеют отличные плюсы и минусы по сравнению с другими.
Оба языка предлагают высокоуровневые функции, такие как «сборка мусора», способ автоматического восстановления памяти из объектов, которые больше не используются. Для многих программистов это большое преимущество, поскольку позволяет легко управлять использованием памяти. Обратной стороной, однако, является автоматическая сборка мусора — как и многие другие высокоуровневые функции — за счет производительности.
То же самое и с библиотеками. Программы, созданные на C #, содержат много служебных данных и библиотек. Хотя эти библиотеки упрощают и ускоряют разработку, они приводят к созданию более крупных приложений, чем те, которые созданы с помощью конкурирующих, более низкоуровневых языков программирования.
Одна из вещей, которая помогла Unity выделиться с момента ее появления, — это поддержка как 2D, так и 3D игр. Это помогло ему занять нишу среди мобильных разработчиков. По сей день Unity является одним из ведущих движков для мобильных игр.
В совокупности все эти факторы делают Unity хорошим вариантом для разработчиков, чьи потребности в виртуальной реальности относительно невелики или которые в первую очередь планируют разработку виртуальной реальности для мобильных устройств, таких как Samsung Gear VR или Google Dashboard.
[content_block id = 21218 slug = learn-more-about-pixo-vr-training-cta]
Нереальный
Unreal, в настоящее время работающий на движке Unreal Engine 4 (UE4), имеет самый длинный послужной список в качестве ведущей среды разработки для высококлассных игр.Если игровая студия хочет разработать игру следующего поколения с максимально захватывающей и высококачественной доступной графикой, Unreal — лучший выбор. На это есть несколько причин.
Прежде всего, исходный код UE4 открыт, что дает разработчикам полный доступ для настройки и оптимизации своей разработки. Независимо от того, насколько специфичны или нужны разработчики, доступ к исходному коду делает это возможным.
Кроме того, UE4 использует C ++ в качестве родного языка. Хотя некоторые разработчики считают, что кривая обучения C ++ немного выше, чем C # или JavaScript, эта кривая обучения дает больше возможностей и производительности.C ++ имеет заслуженную репутацию благодаря лучшей производительности среди компилируемых языков программирования.
Стремление к производительности проявляется и в других отношениях. UE4 включает в себя полноценный профилировщик, который поможет вам оптимизировать код. С помощью профилировщика UE4 вы можете запускать свой код и наблюдать в режиме реального времени, чтобы увидеть, что ваше приложение делает изнутри: сколько времени и ресурсов тратится на анимацию, рендеринг и т. Д. Хотя Unity предлагает профилировщик, он доступен только в Unity Pro, что может стать препятствием для небольших команд разработчиков.
Отличительной чертой UE4 являются его графические возможности. В то время как UE4 отлично справляется с 2D, его 3D-графика не имеет себе равных, графика нового поколения. Среди многих вещей, которые выделяют его, — это то, как он обрабатывает динамическое освещение, а также создание фотореалистичных персонажей.
Для организаций, стремящихся разрабатывать VR-контент, одним из самых больших преимуществ UE4 является его редактор в VR. Редактор в VR позволяет получить доступ к меню Content Browser и вносить изменения, не выходя из виртуальной среды.Это бесценный инструмент, который поможет настроить и настроить вашу среду в режиме реального времени.
Еще одним преимуществом UE4 является его функция Blueprints — способ визуального проектирования с использованием узлов. Это отличный способ быстро создать прототип, прежде чем выполнять тяжелую работу программно. Кроме того, его относительно легко понять непрограммистам, что делает его хорошим входом в UE4.
Благодаря долгой истории Unreal в игровом сообществе, не говоря уже о том, что это популярная платформа для высокопроизводительных игр, она может похвастаться самым большим сообществом разработчиков.Это огромное преимущество для команд разработчиков, как новых, так и опытных, поскольку это означает, что можно найти ответ практически на любой вопрос, который может у вас возникнуть.
И последнее, но не менее важное: цены на Unreal трудно превзойти. В отличие от Unity, который поставляется с одним бесплатным и двумя платными планами, UE4 полностью бесплатен для использования, при этом роялти взимаются только после того, как готовый продукт достигает определенного денежного порога. Для корпоративных клиентов, которые хотят сосредоточиться на симуляциях VR-обучения, Unreal также предлагает Unreal Studio без лицензионных отчислений за 49 долларов в месяц.
Что выбрать?
Без сомнения, Unity и UE4 — отличные платформы, на которых можно строить свои усилия в области виртуальной реальности. Недаром эти два движка являются тяжеловесами как в играх, так и в виртуальной реальности.
Как упоминалось ранее, Unity — хороший выбор, если ваши потребности относительно скромны, как с точки зрения иммерсивного опыта, так и с точки зрения вычислительной мощности. Благодаря сильной мобильной базе Unity — хороший выбор, если вам нужна виртуальная реальность на смартфоне.
Если, с другой стороны, вы хотите получить самое лучшее в иммерсивной виртуальной реальности, вам подойдет UE4.Благодаря своим корням на C ++, он предлагает уровень производительности, с которым Unity не может сравниться, не говоря уже о непревзойденном контроле благодаря полному доступу к исходному коду. Это означает, что, в то время как Unity может быть ориентирована на мобильную, легкую виртуальную реальность из коробки, UE4 предлагает лучшую масштабируемость — от самых крупных проектов виртуальной реальности до самых маленьких, от настольных компьютеров до мобильных устройств. Кроме того, хотя UE4 иногда имеет репутацию сложного в освоении, многие разработчики считают его подход более логичным, чем Unity.
Все это делает UE4 первоклассной платформой для разработки VR, которая ставит вас на место водителя и предлагает все необходимое для создания следующего великолепного опыта VR.
навыков, необходимых для создания серьезной VR-игры с игровым движком
Если вы планируете создать серьезную игру или образовательный опыт в виртуальной реальности, вам потребуется освоить несколько базовых навыков разработки с использованием игрового движка (также известного как программное обеспечение для разработки игр). Вы можете использовать несколько различных игровых движков для создания опыта виртуальной реальности, и два из них, безусловно, самые популярные — Unity и Unreal Engine. (Unreal Engine 4 или UE4 — это самая последняя версия, доступная на момент написания этой статьи.) AppGameKit VR — еще один хороший, хотя и менее популярный. В этой статье речь пойдет о Unity и UE4.
Unity, как правило, предпочитается большинством разработчиков игр для виртуальной реальности, и 91 процент смешанной и дополненной реальности Microsoft HoloLens создается с помощью Unity. Однако UE4 предлагает одно явное преимущество: его могут использовать непрограммисты. Возможно, самым большим преимуществом Unity перед UE4 является обширная библиотека отличных руководств, которые она предлагает, чтобы помочь вам в обучении, а также доступность множества руководств, созданных пользователями.Однако это очень мощные (и бесплатные!) Программы, которых более чем достаточно, чтобы помочь вам разрабатывать и разрабатывать даже самые сложные и визуально потрясающие серьезные игры.
Как Unity, так и первая версия Unreal Engine изначально были разработаны для создания традиционных 2-D игр, но обе значительно эволюционировали с годами, что упростило выбор 3-D (то есть VR) в качестве варианта для начала создания. VR-игра. Нельзя сказать, что создавать VR-игры легко, просто переключить режимы с 2-D на 3-D легко.На самом деле разработка игр для VR невероятно сложна. Если вы планируете разрабатывать свои собственные серьезные игры, вам и вашей команде необходимо изучить и применить несколько важных навыков, как описано ниже.
Базовое знакомство с программным обеспечением игрового движка VR
Хотя для разработки VR-игр доступно несколько дополнительных движков, большинство разработчиков VR-игр используют Unity или UE4. Эти программы являются мощными и сложными, а это означает, что вам нужно многому научиться и управлять, в том числе:
- Виртуальная среда, в которой будет происходить игровой процесс
- Источник света и направление
- Углы и направление камеры
- Применение законов физики к вашему миру
- Аватары и персонажи
- Передвижение
- Взаимодействие с объектами
- Связь
- Меню
- Подсчет очков
- Уровни
- Слои
- Текстуры
- Цвета
- Звуковые эффекты
- Музыка
- Хронология
- Редактор кода
- Организация всех ваших активов (например,g., объекты, код, папки и т. д., которые вы использовали при создании игры)
- И многое, многое другое
Это не Photoshop, где вы просто открываете файл фотографии и начинаете применять фильтры и кадрировать. Ни одна из этих функций не является невозможной для изучения, но она может быть ошеломляющей, когда вы в первый раз открываете игровой движок и начинаете ковыряться.
Если вы раньше не использовали игровой движок, я настоятельно рекомендую вам начать с изучения основных руководств в подобных видео.
Примечание: Вам понадобится очень быстрый и мощный игровой компьютер для запуска игрового движка и создания виртуальной реальности. Мы подробно рассмотрим то, что вам понадобится (например, видеокарты, процессоры, оперативная память, мониторы и т. Д.), В следующей статье.
Знание объектно-ориентированного языка программирования
Независимо от того, пишете ли вы код лично или нет, игровые движки создают игры с использованием объектно-ориентированного языка программирования. Не вдаваясь в подробности здесь, объектно-ориентированные языки программирования позволяют игровым движкам (и разработчикам игр, использующим игровые движки) легко организовывать и манипулировать тысячами различных объектов по мере необходимости.Объекты содержат данные (они же атрибуты) и код (они же методы). Эти объекты могут взаимодействовать друг с другом. Проще говоря, это означает, что рука может бросить камень, камень может ударить окно и окно может разбиться.
Если вы собираетесь использовать Unity, вам необходимо изучить объектно-ориентированный язык программирования C # (произносится как «видеть острый»). Вам не обязательно учиться кодировать на C # с самого начала, но, по крайней мере, вам нужно знать основы работы языка, чтобы вы могли копировать код из библиотек кода, вставлять его в свою игру. редактор кода и настройте его под свои нужды.На самом деле, в конечном итоге вам нужно будет достаточно хорошо изучить C #, чтобы устранять ошибки, пока код и игра не заработают должным образом.
Некоторые разработчики Unity используют JavaScript вместо C # (или, возможно, даже Boo или других языков сценариев), но в C # есть инструменты и возможности, доступные в Unity, которых нет в других языках, поэтому, вероятно, лучше просто изучить C # и придерживаться его.
В UE4 вам технически не нужно учиться программировать, чтобы создавать базовые игры. Вместо этого вы можете использовать Blueprints, систему визуальных сценариев, основанную на C ++ (произносится «см. Плюс плюс»).В Blueprints замечательно то, что разработчикам игр не нужно знать, как кодировать, чтобы использовать их, потому что это полностью визуальный интерфейс. Если вы опытный программист или нанимаете его, то вы можете использовать C ++ для создания более продвинутых систем визуальных сценариев, которые непрограммисты могут затем использовать для создания более продвинутых или более специализированных игр. Если это ваша первая попытка создать VR-игру, то пока придерживайтесь Blueprints. Это сделает вашу жизнь намного проще.
Возможность создавать (или покупать) игровые активы
Хотя для создания основ игры требуется знакомство с игровыми движками и объектно-ориентированными языками программирования (или Blueprints), вам понадобится много ресурсов для добавления в игру.Активы — это окружение, реквизит, персонажи / аватары, транспортные средства, спрайты (т. Е. Блуждающие неигровые персонажи, которые делают виртуальный мир более реалистичным), музыка, звуковые эффекты, текстуры (например, дым, вода и световые эффекты), и т. д., которые вы будете использовать в своей игре.
Вы можете создать все свои собственные ресурсы, что, вероятно, и делают некоторые крупные компании по разработке игр, но это требует много времени и навыков. Вы можете нанять или сотрудничать с талантливыми дизайнерами VR-игр. Вы можете нанять дизайнеров для создания каждого необходимого актива.К счастью, есть более простое решение. Вы можете легко купить все необходимые ресурсы в Unity Asset Store, на Unreal Engine Marketplace или на одной из сотен сторонних торговых площадок и компаний, занимающихся проектированием активов, которые находятся всего в нескольких шагах от поиска Google. Возможно, вам не удастся найти точный дизайн космического корабля, персонажа или звуковой эффект, который вы задумали, но вы почти всегда найдете что-то достаточно близкое и в 1000 раз более доступное, чем многие другие варианты.
Опыт создания игр в виртуальной реальности
Дизайн игрVR настолько нов, что здесь нет установленных правил — во всяком случае, их немного.Это прекрасное время для творчества и экспериментов. Хотели бы вы, чтобы в вашей игре было семь динамичных уровней? Большой! Сделайте семь уровней. Вы бы предпочли один извилистый уровень, давая игрокам возможность слышать мысли каждого игрового персонажа? Большой! Сделайте это вместо этого. Вы создаете целую вселенную с каждой игрой и экспериментом в виртуальной реальности. Сходите с ума и добавляйте все, что хотите.
Даже если предположить, что вы покупаете все ресурсы, которые будет использовать ваша игра, и даже если вы уже знаете C # или планируете использовать Unreal Engine, вам все равно понадобится опыт, чтобы правильно использовать эти ресурсы.Например, чем хорош ваш новый шикарный аватар, который вы только что купили, если вы не можете заставить его двигаться, разговаривать или взаимодействовать с виртуальным миром? Помимо множества ресурсов, которые вам понадобятся, вам также потребуются разработчики и программисты виртуальной реальности с определенным набором навыков, включая, помимо прочего:
- Дизайн игры и геймплей
- Дизайн уровней
- Анимация
- Звуковые эффекты и музыка
Помимо этих технических навыков, вам также понадобятся специалисты по:
- Озвучка
- Рассказ
- Трехмерное изображение (различные материалы, которые вам могут понадобиться, см. Выше)
- Маркетинг и продажи (даже если вы планируете просто разместить свою игру в Steam, вам все равно нужно будет вызывать ажиотаж по этому поводу, участвовать в торговых выставках и т. Д.)
Не забудьте привлечь к процессу разработки и своих экспертов по контенту. Учителя математики, истории искусств или физики (или того, что вы преподаете в этой игре) являются неотъемлемой частью каждого этапа процесса разработки игры. Не заблуждайтесь, думая, что разработчики игр могут просто сделать игру, а вы можете добавить образовательный контент позже, потому что ни игровой процесс, ни уроки не будут иметь никакого смысла. Разработчики и игровые дизайнеры должны постоянно работать с экспертами по контенту и учиться у них, чтобы создать отличную игру, а экспертам по контенту нужно будет много узнать о дизайне и разработке игр.
Возможно, ты научишься и все сделаешь сам. Или, возможно, вы сделаете все это небольшой командой из двух-трех человек. Некоторым талантливым, амбициозным и экономным инди-разработчикам игр это, безусловно, удалось. Однако учтите, что разработка самых больших видеоигр стоит от десятков до сотен миллионов долларов. Даже самые маленькие инди-компании, занимающиеся разработкой игр, обычно нанимают команды по крайней мере из 10-20 высококвалифицированных (хотя часто и недостаточно оплачиваемых) разработчиков и дизайнеров для создания любой конкретной игры.
Кроме того, если у вас уже есть все навыки, необходимые для создания всей игры от начала до конца, если вы делаете все самостоятельно, у вас уйдут месяцы или годы, даже если вы работаете полный рабочий день. на нем, и кто может себе это позволить? Вы можете ограничить продолжительность игры, сложность деталей, размер виртуального мира, количество уровней и сложность игрового процесса, но, тем не менее, создание новой игры самостоятельно — огромная и непростая задача.Вы сделаете игру лучше, закончите ее быстрее и получите больше удовольствия, если создадите небольшую, но талантливую команду, которая поможет вам.
Хорошая новость в том, что вам не нужно нанимать всех этих людей на полную ставку. Часто вы можете нанять нужных вам людей на срок от нескольких часов до нескольких месяцев, пока их часть работы не будет выполнена.
Если вы по-прежнему полны решимости создать все самостоятельно, от создания игры и создания раскадровки до выпуска и маркетинга обновленных версий, то начните с чтения книг по дизайну игр и теории игр, приведенных ниже.На самом деле, вы все равно должны читать эти книги.
- Искусство игрового дизайна: Книга линз , второе издание, Джесси Шелл
- Повышение уровня! Руководство по великолепному дизайну видеоигр , второе издание, Скотт Роджерс
- Мастерская игрового дизайна: подход к созданию инновационных игр, ориентированный на игру , третье издание, Трейси Фуллертон
- Правила игры: основы игрового дизайна, Кэти Сален и Эрик Циммерман
- Теория забавы для игрового дизайна, , второе издание, Раф Костер
- Геймификация обучения и преподавания: игровые методы и стратегии обучения и образования , Карл М.Капп
Последний особенно важен для тех, кто создает серьезные игры, поскольку он ориентирован на разработку игр в образовательной среде. Вы также можете прочитать дополнительную книгу The Gamification of Learning and Instruction Fieldbook: Ideas on Practice , написанную Каппом, Лукасом Блэром и Ричем Мешем, где описаны методы и примеры для применения концепций на практике.
После того, как вы прочитаете все эти книги, вы можете приступить к изучению отдельных наборов навыков, описанных выше.
Готовность использовать существующий контент
Возможно, вы сейчас чувствуете себя подавленным, как будто вы откусили больше, чем можете прожевать, учитывая ваши ограниченные знания, время и бюджет. Справедливо. К счастью, вам не нужно создавать весь свой собственный образовательный контент. Несколько компаний уже создают образовательный контент и серьезные игры в VR. Например, Google Expeditions создает образовательные экскурсии в VR для Cardboard. Eon создает образовательный контент, используя как AR, так и VR.Engage, созданный Immersive VR Education и HTC Vive, представляет собой виртуальное пространство для взаимодействия и общения учителей и учащихся; Immersive VR Education также создала несколько образовательных VR-приложений. Вот список из десятков образовательных VR-компаний и компаний-разработчиков. Возможно, вы могли бы даже сотрудничать с одной из этих компаний, чтобы создать индивидуальный опыт с использованием существующего или нового контента.
По общему признанию, это не совсем то же самое, что создать собственную серьезную игру, которая изменит мир (или вашу отрасль, ваш бизнес, вашу школу).Пока вы не создадите свои собственные удивительные обучающие игры, оглядывайтесь вокруг и используйте то, что уже создали другие, чтобы вы и ваши ученики сразу же приступили к работе.
Сводка
Независимо от того, найдете ли вы существующие игры, которые соответствуют вашим потребностям, вам обязательно нужно начать изучать и экспериментировать с игровыми движками прямо сейчас. Ускорьте свое обучение, читая блоги и слушая подкасты о VR и играх, участвуя в местных сообществах VR и игровых сообществах, посещая местные встречи по VR и играм, а также посещая студии разработки игр VR.
Разработка игрVR, несомненно, сложна и трудна, но это не ракетостроение. Вы (да, даже вы) можете этому научиться. Множество людей научились создавать VR-игры и впечатления, начиная с не более чем желания учиться и наглости, чтобы начать создавать что-то крутое. Так что загрузите игровой движок, начните смотреть некоторые обучающие программы и уже приступайте к работе!
Как всегда, в комментариях ниже расскажите нам, какой игровой движок вам больше всего нравится и почему, а также над какой серьезной игрой вы работаете.
Unreal Engine 5 поддерживает OpenXR с новым шаблоном VR
ВыпускUnreal Engine 5 в раннем доступе включает новый шаблон виртуальной реальности, совместимый с OpenXR, с поддержкой Oculus Quest 1 и 2, Rift S, Valve Index, HTC Vive и Windows Mixed Reality.
OpenXR — это широко поддерживаемый стандарт для разработки VR, и последний шаблон VRTemplate Unreal Engine 5, использующий этот фреймворк, означает, что некоторые из крупнейших и наиболее опытных разработчиков VR, вероятно, начнут экспериментировать с ним уже сегодня.
«Мы создали новый шаблон VRTemplate, используя платформу OpenXR, стандарт разработки виртуальной реальности для нескольких компаний. Шаблон призван стать отправной точкой для всех ваших VR-проектов. Он включает в себя инкапсулированную логику для передвижения телепортации и общих действий ввода, таких как захват и прикрепление предметов к руке », — поясняется в примечаниях к выпуску Epic для шаблона.
В примечаниях к выпуску объясняется, что плагин OpenXR в движке Unreal поддерживает «плагины расширения», поэтому вы можете добавлять в OpenXR функциональные возможности, которых в данный момент нет в движке.Epic также настоятельно рекомендует разработчикам «создавать свой VR-проект с помощью VRTemplate в UE5, потому что параметры проекта и плагины уже настроены для наилучшего взаимодействия с VR. В частности, Lumen активирован по умолчанию в UE5, но в настоящее время не поддерживается на платформах XR. Поэтому, если вы создаете проект VR без VRTemplate, вы должны отключить Lumen ».
Lumen — это технология глобального освещения Unreal в реальном времени. В то время как UE5 «в целом поддерживает те же платформы, что и UE4», ни Lumen, ни новая «система виртуализированной микрополигональной геометрии» Nanite от Epic пока не поддерживают VR.Нанит предназначен для «удаления ограничений количества полигонов и отрисовки вызовов», чтобы исключить «трудоемкую работу, такую как запекание деталей в карты нормалей и ручное создание LOD». Это будет огромной экономией времени для разработчиков VR, поддерживающих широкий спектр оборудования, начиная от автономного Quest и заканчивая мощными компьютерными VR-системами, но пока эта технология поддерживается только на консолях следующего поколения и Windows. Представитель Epic сообщил нам, что компания «продолжает разрабатывать инструменты и рабочие процессы, которые позволят вам упростить высокополигональную геометрию, импортированную для Nanite, для использования на других платформах.”
Учебное решение VR для эксплуатации и обслуживания судовых двигателей
Тестирование двигателей
Мне передают снаряжение, я надеваю беспроводные очки VR и беру контроллер. В начале тренировки я оказываюсь посреди бескрайней равнины. Бледный свет на краю горизонта указывает на восход солнца. Вспышка, и я стою на лестнице, ведущей в машинное отделение AOPS, оснащенного двумя двигателями MAN 32/44 CR.
Роб направляет меня к интерфейсу управления двигателем, виртуальному компьютеру, который используется для управления двигателем, а также предоставляет информацию о том, как двигатель работает. Я запускаю двигатель, как было предложено, и пока все вроде работает нормально. Указывая и щелкая контроллером в точке на дорожке, я могу попасть в любое место в комнате — и за ее пределами: проверяя очень реалистичный металлический корпус двигателя в пространстве виртуальной реальности, Роб предлагает мне «просто ткнуть моя голова через это »и заглянуть во внутреннюю работу двигателя.
Первый инстинкт — сопротивляться ударам головой о металл — тогда какая-то часть моего мозга успевает передать сообщение в нейронные центры, что я нахожусь в виртуальном пространстве. Я встаю на колени, просовываю голову в кожух и смотрю на прекрасную внутреннюю работу двигателя — зрелище, которое невозможно увидеть в реальных условиях.
Я слышу изменение звука двигателя и спешу обратно к приборной панели, чтобы увидеть и услышать сигналы тревоги и стать свидетелем остановки двигателя. Давление смазочного масла опасно низкое, и Роб говорит мне, пытаясь двигаться вперед, что я должен заменить насос.Теперь для этого понадобится гаечный ключ и открутите довольно много гаек и болтов. Этому писателю, привыкшему к клавиатуре и двухмерному экрану, требуется несколько минут, чтобы адаптироваться к новой среде, но с помощью комментариев Роба из реального мира даже я выясняю, как снова запустить двигатель.
Судя по лицам, которые я вижу, когда снимаю очки виртуальной реальности и возвращаюсь в конференц-зал реального мира в Галифаксе, становится очевидным, что я ни в коем случае не стану хорошим кандидатом на должность моряка AOPS в Королевском флоте Канады. , хоть.Был ли это момент, когда даже мой дружелюбный инструктор Роб не мог понять, почему я просто не перешагнул через воображаемый набор инструментов виртуальной реальности? Или когда я просто не мог видеть, что тряпка, которую я забыл после чистки турбонагнетателя, загорелась?
Для меня те довольно неловкие моменты в виртуальном машинном отделении AOPS преподали мне важные уроки тренировочного опыта: хотя не все подходят для этого с самого начала, практика помогает достичь совершенства и в виртуальной реальности.Unreal Engine 5: ранний доступ к шаблону виртуальной реальности, основанному на OpenXR
Epic Games объявила, что Unreal Engine 5 теперь доступен в раннем доступе, включая новый шаблон для проектов VR, построенных на OpenXR 1.0, промышленный стандарт для создания приложений виртуальной и дополненной реальности, не зависящих от устройств.
Epic Games привносит множество новых функций и улучшений в последнюю версию своего игрового движка Unreal Engine 5. Хотя некоторые из самых важных функций, такие как система освещения Lumen и система сетки Nanite, еще не поддерживают VR, сегодняшнее раннее Доступная версия UE5 включает в себя перестроенный шаблон виртуальной реальности, построенный на OpenXR.
Шаблон VR в Unreal Engine 5 разработан как идеальная отправная точка для проектов VR.Он имеет встроенные базовые и расширяемые функции для передвижения VR и взаимодействия с объектами.
А поскольку он построен на OpenXR, разработчикам не нужно беспокоиться о стольких настройках для каждой гарнитуры, если они хотят поддерживать несколько гарнитур. Система также поддерживает расширения OpenXR для добавления функций, зависящих от поставщика.
Шаблон настраивает Unreal Engine 5 с настройками, специфичными для VR, такими как автоматическое отключение функции Lumen (поскольку она еще не поддерживается для гарнитур VR).
Epic заявляет, что «настоятельно рекомендуется создать свой VR-проект с использованием VRTemplate в UE5», и отмечает, что шаблон OpenXR VR поддерживает следующие платформы VR:
- Oculus Quest 1 и 2
- Oculus Quest с Oculus Link
- Oculus Rift S
- Индекс клапана
- HTC Vive
- Смешанная реальность Windows
Epic сообщает, что версия Unreal Engine 5 в раннем доступе еще не подходит для производства, но разработчики, желающие поэкспериментировать, могут загрузить ее сегодня через средство запуска Epic Games и даже получить доступ к исходному коду UE5 на GitHub.Ожидается, что полная готовая к производству версия Unreal Engine 5 будет выпущена в начале 2022 года с дополнительными функциями и улучшениями.
кастомных «игровых движков» для VR? : Vive
Привет всем, прежде всего спасибо всем, кто недавно порекомендовал мне пики на пару недель с VR. Это был абсолютный взрыв , и я добился потрясающего успеха в том, чтобы познакомить друзей и семью с VR.
Что касается настоящей причины, по которой я купил Vive (вероятно, довольно распространенный) — меня интересует разработка.У меня около 10 лет программирования + (увлеченный) опыт разработки игр, кое-где с Unity. Мой главный интерес к созданию игр всегда был связан с хардкорным техническим аспектом, поэтому я обычно избегаю использования сторонних движков, вместо этого выбирая работу «с нуля», поскольку все мои последние усилия были порождены пользовательским движком WebGL, который я написал и разработал в мое свободное время (на данном этапе стоит отметить, что я никогда не был заинтересован в выпуске чего-либо, или, конечно, я бы, вероятно, уже давно перешел на Unity или что-то подобное — я действительно нахожусь в этом просто ради технических острых ощущений, поскольку игры представляют собой чрезвычайно сложную задачу в программном обеспечении).
Мой вопрос по разработке заключается не в том, «как лучше всего начать работу с Unity», потому что для этого есть тонны ресурсов. Вместо этого мой вопрос довольно сложен для Google — как мне начать «с нуля» без стороннего движка? Я предполагаю, основываясь на ненадежном поиске в Google и задаваемых вопросах, что мне нужно будет работать с OpenVR SDK (что в конечном итоге и есть SteamVR?)? Кажется, не так много ресурсов для работы с SDK напрямую, а не с через движок, поэтому я хотел спросить, есть ли здесь кто-нибудь достаточно опытный, чтобы дать мне базовый указатель для начала работы.Куда-нибудь я могу поискать, может быть, это поможет мне во всем разобраться — или несколько реальных слов о том, почему я мог бы решить смешать всю идею целиком на этот раз и укусить пулю с Unity или Unreal.
TL; DR сумасшедший, полу-игровой наркоман-программист хочет работать с VR напрямую, а не с готовым движком, таким как Unity. Ресурсы о том, как начать работу, кажутся скудными или вообще отсутствуют. Пожалуйста, остановитесь (но не чувствуйте себя обязанным).
Люблю вас всех.
INFINITI VR ДВИГАТЕЛЬ
INFINITI VR ДВИГАТЕЛЬ
3.0-литровый двигатель V6 с двумя турбинами: самый продвинутый V6 для INFINITI
- Самый легкий, самый мощный, самый чистый и самый экономичный двигатель V6 с турбонаддувом, который когда-либо предлагал INFINITI.
- Доступны две выходные мощности: 300 л.с. или 400 л.с.
- Технические инновации улучшают управляемость и производительность
- Компактная компоновка с новым интегрированным выпускным коллектором
- Два года подряд входит в список 10 лучших двигателей Ward
Новый компактный и легкий 3.0-литровый двигатель V6 с двумя турбинами — это самый продвинутый двигатель V6, который когда-либо предлагал INFINITI, обеспечивающий идеальный баланс между управляемостью, эффективностью и производительностью.
VR30DDTT — это совершенно новый двигатель из нового эксклюзивного семейства силовых агрегатов VR, созданный на основе многолетнего наследия бренда в области трансмиссий V6. Новый двигатель был разработан, чтобы расширить возможности водителя и предложить увеличенную мощность и крутящий момент, а также более высокий уровень эффективности, чем любые сопоставимые предшественники.
Уменьшенный вес и габариты двигателя частично объясняются более легкими и компактными блоками цилиндров.Результатом является более высокая механическая эффективность, а ряд новых функций и собственных инноваций обеспечивает превосходную производительность.
Некоторые модели INFINITI, в том числе Q60 и Q50, в 2016 году были оснащены совершенно новым 3,0-литровым двигателем V6 с двумя турбинами, имеющим два уровня мощности — 300 или 400 лошадиных сил. Оба двигателя используют одни и те же технологии и предлагают одинаковое непревзойденное ощущение мощной и мгновенной подачи мощности.
Самый продвинутый двигатель V6, который когда-либо предлагал INFINITI
Совершенно новый VR 3.0-литровый двигатель V6 с двумя турбонаддувом обеспечивает убедительное сочетание управляемости, эффективности и производительности. Двигатели «VR» будут использоваться в новых моделях INFINITI, моделях, которые были разработаны для удовлетворения потребностей всех рынков INFINITI во всем мире, что свидетельствует о растущем присутствии бренда во всем мире.
Совершенно новый 3,0-литровый двигатель V6 с двумя турбинами был создан на основе обширного собственного опыта разработки шестицилиндровых силовых агрегатов. Семейство силовых агрегатов VQ V6, предшественников модели VR, представляет собой давно созданную серию двигателей, отмеченную множеством наград, которые используются в моделях INFINITI с 1994 года.
В течение четырнадцати лет, с 1995 по 2008 год, этот двигатель VQ был включен в список «10 лучших двигателей Уорда», что является непревзойденным достижением. Двигатель серии VR был включен в список 10 лучших двигателей Ward в 2017 и 2018 годах и является одним из двух двигателей, получивших награду второй год подряд.
Новые технологии для лучшей в своем классе выходной мощности и эффективности
Совершенно новый 3,0-литровый двигатель V6 с двойным турбонаддувом был разработан для обеспечения оптимальной мощности и крутящего момента для двигателя такого размера, а также оптимальной топливной экономичности.Мощная версия силового агрегата развивает 400 л.с. (298 кВт) при 6400 об / мин и максимальный крутящий момент 475 Нм (350 фунт-фут) при 1600-5200 об / мин; в то время как версия мощностью 300 л.с. (224 кВт) (при 6400 об / мин) обеспечивает крутящий момент 400 Нм (295 фунт-фут) при 1600-5200 об / мин.
В то время как версия мощностью 300 л.с. оснащена одним насосом промежуточного охладителя, двигатель мощностью 400 л.с. использует два для более эффективного управления теплом при работе с более высокими нагрузками. Кроме того, для варианта мощностью 400 л.с. оптический датчик турбонаддува увеличивает мощность турбо-системы на 30%, позволяя лопастям вращаться быстрее.
Эти показатели были достигнуты при повышении эффективности использования топлива до 6,7%, что представляет собой лучшее в своем классе соотношение мощности и эффективности для силового агрегата мощностью 400 л.с.
Такое соотношение мощности и эффективности стало возможным благодаря набору недавно разработанных функций. Расширенное управление синхронизацией обеспечивает улучшенную реакцию, позволяя быстрее реагировать на действия драйвера.
В систему газораспределения установлен новый электродвигатель, увеличивающий скорость дроссельной заслонки для увеличения времени отклика.Это не только положительно влияет на производительность, но и на эффективность, поскольку двигатель может работать более эффективно за счет более точного управления сгоранием в цилиндрах.
Мощность улучшена за счет усовершенствованной новой системы двойного турбонаддува , обеспечивающей плавную и немедленную реакцию при ускорении, одновременно повышая эффективность. Оптимизированная конструкция лопаток турбины помогает двигателю обеспечивать более высокую общую производительность, а более высокие частоты вращения турбины обеспечивают немедленную реакцию системы двойного турбонаддува.
Кроме того, двигатель V6 оснащен новый датчик частоты вращения турбины , который позволяет системе двойного турбонаддува работать со скоростью до 220 000 об / мин — в устойчивом состоянии и 240 000 об / мин в переходном состоянии — выше, чем когда-либо прежде для силового агрегата V6. Обладая большей мощностью для более высоких оборотов, сдвоенные турбонагнетатели повышают мощность более мощной версии двигателя, обеспечивая более высокую мощность и крутящий момент. Датчик турбо скорости на версии мощностью 400 л.с. позволяет увеличить выходную мощность до 30%.
Инженеры разработали систему промежуточного охлаждения с водяным охлаждением для дальнейшего повышения производительности и эффективности. Система быстро охлаждает воздух, когда он попадает в систему двойного турбонаддува, уменьшая турбо-задержку и обеспечивая более быстрое ускорение. Вторичным результатом является более компактная система охлаждения, что означает более короткий путь потока воздуха, поступающего в турбонагнетатель, что позволяет двигателю быстрее реагировать.
A новый электронный привод перепускной заслонки позволяет более точно контролировать поток выхлопных газов от турбокомпрессора, ограничивая количество выхлопных газов, протекающих через агрегат, для повышения общей эффективности двигателя.
Меньший вес, более высокая механическая эффективность, больший привод
Основная структура 3,0-литрового двигателя V6 с двумя турбинами весит 194,8 кг (429,5 фунта) — на 14,1 кг (39,1 фунта) меньше, чем у двигателя, который он заменяет. Новый турбокомпрессор и усовершенствованная система промежуточного охладителя (или CAC) добавляют всего лишь 25,8 кг (56,9 фунта), что в сумме составляет 220,6 кг (486,3 фунта).
Новый силовой агрегат на 19% (0,7 литра) меньше по объему, чем предыдущие двигатели V6, предлагаемые INFINITI.Он основан на наследии компании по внедрению новых инженерных решений и технологий. Точно так же, как эти более ранние двигатели всегда пользовались уважением за их легкую алюминиевую конструкцию и низкое механическое трение, что делало их плавными, прочными и очень отзывчивыми, 3,0-литровый двигатель V6 с двумя турбинами следует за своими ориентированными на производительность предшественниками с более компактной и легкой конструкцией. , сохраняя при этом фокус на производительности.
Главным среди новых элементов, снижающих вес, является нанесение покрытия распылением на блок цилиндров и встроенный выпускной коллектор для головок цилиндров.Это не только делает двигатель легче, но и способствует охлаждению, так как тепло может более эффективно рассеиваться через стенку отверстия из алюминиевого сплава, что еще больше усиливает его физическая конструкция, которая способствует более быстрому отведению тепла в двигателе.
Меньший вес двигателя способствует большей механической эффективности за счет меньшей инерции за счет легких алюминиевых компонентов, в то время как эта дополнительная эффективность повышает управляемость и общие характеристики двигателя V6.
Инженеры внедрили ряд инновационных технологий в новый V6, чтобы сделать вождение еще более увлекательным.Главным из них является новая топливная система с непосредственным впрыском бензина (DIG) . Система DIG высокого давления позволяет более точно впрыскивать топливо в камеру сгорания, обеспечивая точное количество, необходимое для плавного разгона двигателя, в зависимости от положения дроссельной заслонки и частоты вращения двигателя. Эта система делает новый V6 самым чистым и наиболее экономичным двигателем такого типа, который когда-либо предлагал INFINITI, способствуя повышению экономии топлива на 6,7%.
Усовершенствованная система регулирования фаз газораспределения позволяет более точно регулировать объем воздуха в камере сгорания, помогая двигателю работать более эффективно и улучшая экономию топлива в любых условиях.
Новый процесс покрытия отверстий цилиндров еще больше повышает механическую эффективность. Новая технология «зеркального покрытия отверстий» с низким коэффициентом трения позволяет поршням более свободно перемещаться в цилиндрах за счет снижения уровня механического трения на 40% по сравнению с предыдущими двигателями V6. Этот процесс покрытия отверстий зеркала включает в себя обработку стенок цилиндров термическим напылением, после чего покрытие затвердевает. «Зеркально-гладкая» стенка цилиндра снижает трение поршня и повышает производительность.
Процесс покрытия отверстия зеркала позволяет сэкономить 3,0-литровый двигатель V6 с двойным турбонаддувом на 1,7 кг (3,8 фунта) по сравнению с предыдущими двигателями V6 благодаря повышенной стойкости, которую система распыления обеспечивает к более легким металлам.
Одной из наиболее важных особенностей совершенно нового 3,0-литрового двигателя V6 с двумя турбинами является внедрение нового интегрированного выпускного коллектора , встроенного в головку блока цилиндров, что позволяет инженерам располагать каталитический нейтрализатор ближе к центру цилиндров. выхлопная точка.Это приводит к более короткому пути прохождения горячих выхлопных газов, позволяя каталитическому нейтрализатору нагреваться почти мгновенно — в два раза быстрее, чем у предыдущих двигателей V6 — и сокращая выбросы при холодном запуске.
Перемещение каталитического нейтрализатора ближе к точке выпуска позволяет снизить вес, поскольку двигатель становится более компактным, чем раньше. Эта конструкция позволяет снизить вес на 5,3 кг (11,7 фунта).
Новый алюминиевый блок цилиндров сконструирован как двигатель «квадратной формы» с одинаковым диаметром цилиндра и ходом поршня (86.0 x 86,0 мм). В результате 3,0-литровый двигатель V6 с двумя турбинами сочетает в себе низкое механическое трение и высокую скорость отклика. Мощность и крутящий момент доступны в более широком диапазоне средних частот вращения двигателя, в которых водители обычно проводят большую часть своего времени. Результат — идеальный баланс между управляемостью, эффективностью и производительностью.
Новый двигатель V6 запущен в производство в 2016 году
Совершенно новый 3,0-литровый двигатель V6 с двумя турбинами поступил в производство в 2016 году и производится на заводе силовых агрегатов в Иваки, Фукусима, Япония.