Сравнительный анализ роботизированной коробки переключения передач и автоматической коробки переключения передач
Коробка передач (коробка переключения передач, КП, КПП, англ. Gearbox) — агрегат (как правило, шестерёнчатый) различных промышленных механизмов и трансмиссий механических транспортных средств.
Автомобили нашего времени могут оборудоваться одним из четырех видов КПП:
– Механической
– Автоматической
– Роботизированной
– Вариаторной.
Более подробно из четырех видов КПП рассмотрим две КПП:
– автоматическую
– роботизированную.
Первые попытки создания простейших АКПП относятся к началу автомобилизма — 30-м годам прошлого века. Например, в автомобилях Ford-T начала использоваться планетарная механическая трансмиссия, в автомобилях корпораций General Motors и Reo — первые полуавтоматические трансмиссии.
Хотя конструкции были далеки до идеала, это послужило мощным толчком в развитии конструкторской мысли.
В СССР дело с «автоматами» обстояло несколько хуже, но разработки велись и достаточно успешно. Первые АКПП использовались на «государственных» автомобилях (например, на знаменитой «Чайке»), затем — на «народных» автомобилях, в частности на автомобилях ГАЗ. Также АКПП широко применялись на автобусах (городские ЛиАЗы), спецтранспорте.
В 70–90-е годы отечественный автопром коробки-автоматы практически не применял, ограничиваясь более утилитарной и простой «механикой». В 2000-х, отечественные производители вновь решили вернуться к АКПП. К этому их вынудил рынок — выбор потребителей зачастую не в пользу «механики», а иностранные производители предлагают более широкий выбор комплектаций авто как с механикой, так и автоматом.
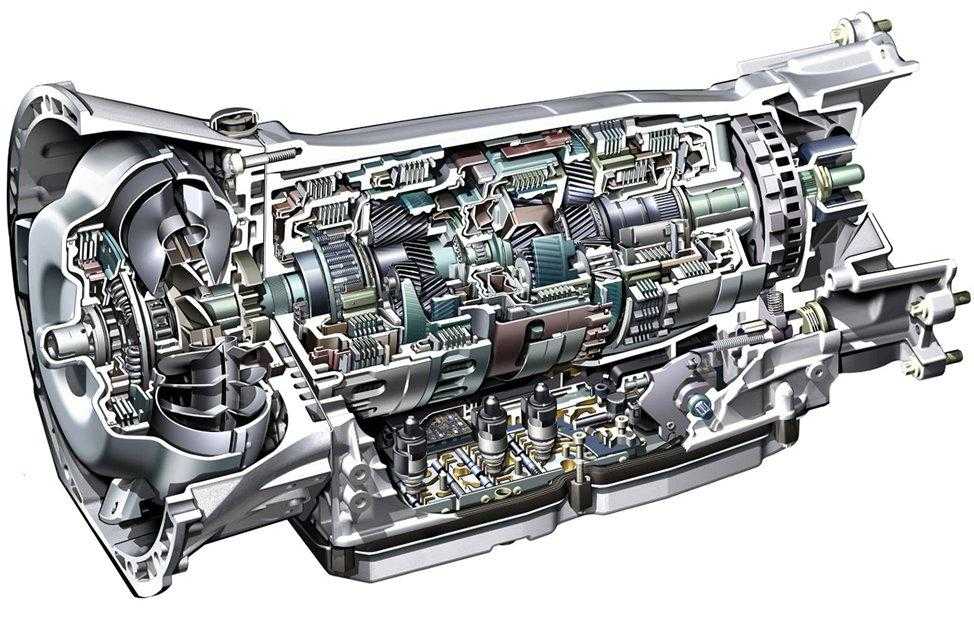
В устройство АКПП входит:
- Гидротрансформатор — механизм, обеспечивающий преобразование, передачу крутящего момента, используя рабочую жидкость.
 Рабочая жидкость для АКПП обычно, готовое трансмиссионное масло для автоматических коробок передач.
Рабочая жидкость для АКПП обычно, готовое трансмиссионное масло для автоматических коробок передач. - Планетарный редуктор — узел, состоящий из «солнечной шестерни», сателлитов, и планетарного водила и коронной шестерни. Планетарка является главным узлом автоматической коробки.
- Система гидравлического управления — комплекс механизмов, предназначенных для управления планетарным редуктором.
Время не стоит на месте, все усовершенствуется, это коснулось и КПП, начали появляться роботизированные коробки передач.
Совместно сложив понятия автомат и механика, конструкторы получили устройство называемой роботизированной коробкой передач, совместившее в себе плюсы и минусы обоих агрегатов.
Коробка с двойным сцеплением, как и много других изобретений, пришла из спорта, точнее с гоночных треков. Первым стремлением создать КПП с двойным сцеплением относится французу Адольфу Кегрессу. Еще в далеком 1939 году всемирно известный конструктор пытался применить свою разработку на легендарном Citroen Traction. Но, к сожалению, данная разработка так и осталось «бумажным проектом», так и не дойдя до конвейера.
Но, к сожалению, данная разработка так и осталось «бумажным проектом», так и не дойдя до конвейера.
Позже, в 80-ых годах 19-го века инженерам Porsche все же удалось создать коробку переключения, способную переключать передачи под нагрузкой, не сбрасывая при этом газа. В гонках данное изобретение имело невероятный успех, ведь даже доли секунд, которые теряются при сбрасывании скорости во время переключения передач, могут решить исход заезда.
За основу конструкции разработчики взяли механическую коробку, более надежную, чем автоматическая, добавив к ней специальные устройства, отвечающие за выжим сцепления с переключением передач.
В обычной механике переключением передачи с выжимом сцепления заведует непосредственно водитель. Он самостоятельно, ориентируясь на дорожную ситуацию используя педаль сцепления с рычагом КПП, выбирает необходимую передачу согласно времени ее включения.
Изобретатели решили исключить водителя из этой цепи, доверив все действия автоматике и компьютеру. Установив узлы-актуаторы, они сделали возможным автоматическое переключение роботизированной коробки, основой которой осталась механика.
Установив узлы-актуаторы, они сделали возможным автоматическое переключение роботизированной коробки, основой которой осталась механика.
Коробка робот работает при помощи узлов-актуаторов. Получая информацию о скорости движения, оборотах двигателя, датчиков ABS и ESP с бортового компьютера и действуя через свою механическую часть, они выжимают сцепление, перемещают синхронизаторы в коробке, выбирая необходимую передачу. Сервопривод, ответственный за сцепление, приняв необходимую команду, рассоединяет первичный вал с двигателем. В это время второй сервопривод, выбрав нужную передачу, включает ее. После включения первый актуатор восстанавливает сцепление, и автомобиль продолжает движение.
Сервоприводы, которые имеет робот, могут быть двух видов — электрические и гидравлические. Электрический представляет собой шаговый электродвигатель, перемещающий через редуктор свою исполнительную часть. Гидравлический привод воздействует через гидроцилиндр, получающий команды от электронного блока управления. Поэтому его еще называют электрогидравлическим.
Поэтому его еще называют электрогидравлическим.
Сравним две коробки передач: автоматическую и роботизированную КПП, выделим их плюсы и минусы.
Преимущества АКП
– АКП обеспечивает простое управление автомобилем.
– Если рассматривать гидротрансформатор в качестве аналога сцепления, становится, очевидно, что по сравнению с традиционным сцеплением, привести в негодность этот механизм, так быстро, как это происходит с классическим сцеплением у новоиспеченных водителей, невозможно.
– АКП не создает таких нагрузок на двигатель, как это может происходить с механикой. Переключение скоростей происходит без лишнего увеличения числа оборотов. Следовательно, ресурс двигателя не расходуется впустую.
– За счет использования гидротрансформатора снижается нагрузка не только на двигатель, но и на ходовую часть автомобиля.
– Автомобили с АКП имеют пассивную систему безопасности. В случае если автомобиль стоит на уклоне, он покатиться не может.
– Для шестиступенчатой АКП характерен меньший расход топлива.
Минусы АКП
– Автомобили с АКП не имеют такой динамики разгона, как это есть на автомобилях с механикой.
– На четырех и пятиступенчатых АКП расход топлива значительный. Особенно это проявляется на четырехступенчатых автоматических коробках.
– В целом автомобили, на которых установлена АКП, имеют меньший КПД. Это происходит из-за того, что значительные потери КПД происходят в гидротрансформаторе.
– Сама автоматическая коробка передач стоит дорого. Дорогостоящий ремонт и обслуживание АКП.
– В АКП используется большой объем масла. Причем масло это дорогостоящее. И это все накладывает свой отпечаток на стоимость обслуживания.
– Автомобиль, на котором установлена автоматическая коробка, менее динамичен. Разгон на нем занимает гораздо больше времени, чем это происходит на механике или на автомобилях с роботизированной коробкой передач.
– Существует определенная инерция в переключении передач.
– Если начало движения происходит на склоне, может произойти определенное скатывание назад.
Роботизированная коробка переключения передач
Плюсы роботизированных коробок передач
– Роботизированные коробки передач более экономичные, по сравнению с АКП. Их экономичность находится на одном уровне с механическими коробками.
– Роботизированная коробка стоит дешевле, чем АКП, к тому же она дешевле в обслуживании и ремонте. Потребляет меньше масла, чем АКП.
– Вес роботизированных коробок меньше, чем коробок-автоматов.
– Могут использоваться специальные системы переключения передач, расположенные на руле, которые делают переключение скоростей весьма быстрым. Таким образом, динамика у автомобиля гораздо выше, чем у автомобилей с автоматами.
Минусы роботизированных коробок передач
– По сравнению с АКП переключение скоростей происходит не настолько плавно. Рывки автомобиля во время переключения весьма ощутимы.
– Существует определенная задержка после включения нужной передачи и началом ее выполнения.
– Практически любая остановка требует переключения рычага в нейтральное положение, чего нет в автомобилях с АКПП.
– Любые пробуксовки при движении негативно сказываются на ресурсе роботизированной коробки передач. Т. е. такая коробка подходит в основном для твердых дорожных покрытий.
– Во время начала движения происходит определенный небольшой откат.
Таким образом, в вопросе о том, что лучше робот или автомат, невоможно ответить однозначно. Для каждого автолюбителя вопрос выбора КП индивидуален, и решает он его самостоятельно, опираясь, на свои интересы об удобстве и комфортности управления автомобилем.
Литература:
- Коробка передач // Википедия. URL: http://ru-wiki.ru/wiki/Коробка_передач (дата обращения: 20.01.2017).
- Коробка передач. Виды КПП и принцип действия. // DRIVE2.RU. URL: https://www.drive2.
 ru/b/1096010/ (дата обращения: 20.01.2017).
ru/b/1096010/ (дата обращения: 20.01.2017). - Что лучше: «робот» или «автомат»? // AUTODROP.RU. URL: http://autodrop.ru/ustroystvo-avtomobilya/822-chto-luchshe-robot-ili-avtomat.html (дата обращения: 20.01.2017).
- Как пользоваться коробкой автомат // Wmeste.su. URL: http://wmeste.su/kak-polzovatsya-korobkoj-avtomat/ (дата обращения: 20.01.2017)
- Роботизированная коробка передач: стоит ли довериться роботу // АВТОДОНТ. URL: http://autodont.ru/kpp/robotizirovannaya-korobka-peredach (дата обращения: 22.01.2017).
Основные термины (генерируются автоматически)
Плюсы и минусы роботизированной коробки передач
На смену механическим коробкам передач приходят современные агрегаты, которые не требуют использования сцепления или рычага КПП. Рассмотрим, насколько надежны такие системы и есть ли у них минусы.
Рассмотрим, насколько надежны такие системы и есть ли у них минусы.
С 2015 года ВАЗ заявил, что автомобили серии Priora будут оснащаться роботизированными коробками передач, так же как и многие иномарки. Хоть подобное решение и по сей день не настолько популярно среди отечественных автовладельцев, многие уже оценили преимущества подобных систем. Вес такого «робота» составляет порядка 35 кг, а сам агрегат позволит эксплуатировать машину в более агрессивных условиях с меньшими проблемами. Например, РКПП позволяет запустить мотор при температуре порядка -40 градусов, тогда как автоматическая система (АКПП) справляется с этой задачей только до -25 градусов.
Однако не только эти преимущества требуют внимания. Сегодня производители предлагают намного больше вариантов более оптимальных технических решений. Тем не менее многие приверженцы коробок «автомат» и «механики» отмечают и негативные стороны роботизированных систем. Поэтому стоит подробнее разобраться в принципе работы таких РКПП, их плюсах и минусах.
Что такое РКПП
По сути «робот» представляет собой стандартную механическую коробку передач, в которой отсутствует рычаг КПП и сцепление. Вместо этого в ней установлены сервоприводы (также их называют актуаторами). Благодаря им информация о движении авто (скорости и прочих показателях) преобразуется в цифровой формат, который активирует движение шестерней и валов. Один сервопривод отвечает за включение и отключение сцепления, а другой перемещает шестеренки в самой КПП. Таким образом, отпадает необходимость использования педали сцепления и ручного переключения передач, что значительно облегчает вождение авто.
Однако есть несколько разновидностей таких конструкций. РКПП может быть оснащена:
- Электроприводом. Такие коробки передач стоят дешевле и могут устанавливаться даже на самые бюджетные авто. В этом случае управление осуществляется за счет электромотора, редуктора и исполнительного механизма. Это приводит к более низкому быстродействию подобных систем.

- Гидравлической системой. В таких устройствах за переключение передач отвечают цилиндры, которые подталкиваются за счет силы электромагнитных клапанов. Гидравлические «роботы» больше похожи на классический «автомат». Передачи переключаются быстрее, чем в случае с обычным электроприводом. Кроме этого машина едет более плавно, без рывков. РКПП с гидравликой устанавливаются преимущественно на дорогие автомобили.
Так как, роботизированные КПП по своему принципу работы схожи с «коробками автоматами», у многих водителей возникает дилемма касательно того, какое устройство лучше выбрать. В этом вопросе многое зависит от условий эксплуатации и других факторов.
Преимущества и недостатки «автомата»
Если говорить о плюсах автоматических систем, то к ним можно отнести:
- Более легкое и простое управление.
- Пониженные нагрузки на двигатель (данное преимущество становится более явным, если сравнивать с МКПП, где для переключения скорости требуется большее количество оборотов мотора).

- Пониженные нагрузки на ходовую часть авто.
К минусам стоит отнести:
- Более высокий расход топлива.
- Плохую динамику разгона (если сравнивать с МКПП).
- Уменьшенное КПД.
- Больший расход масла.
- Медленное переключение передач.
- Риск скатывания авто, если машина находится на склоне.
Таким образом, «автомат» во многом лучше «механики», однако на пятки АКПП активно наступает роботизированная система.
Преимущества и недостатки «роботов»
Если говорить о плюсах более современных решений, то стоит выделить:
- Высокую экономичность (в этом плане РКПП не уступает «механике»).
- Низкое потребление масла и меньшие затраты на обслуживание и ремонт.
- Быстрое переключение передач.
- Меньший вес.
- Повышенную динамику.
- Большую надежность (так как современная РКПП изготовлена на основе проверенной временем МКПП, такие агрегаты служат дольше «автоматов»).
- Меньшее пространство, которое система занимает под капотом.

- Более низкую стоимость производства и ремонта.
- Меньший расход топлива.
К недостаткам стоит отнести:
- Слишком резкое переключение передач (водитель каждый раз ощущает небольшой рывок).
- Задержка при переключении передач во время движения задним ходом.
- Необходимость установки рычага в нейтральное положение при каждой остановке.
- Значительное понижение ресурса работы КПП каждый раз, когда происходит пробуксовка.
Данные минусы во многом зависят от модели «робота». Например, в некоторых дешевых моделях задержка между переключением передач может доходить до 2 секунд. Как правило, такие проблемы наблюдаются в устройствах, оснащенных электрическими переключателями. Кроме этого, от системы с электроприводом не приходится ждать адаптивной подстройки в зависимости от стиля вождения авто.
Если же установлена гидравлическая система, то скорость переключения ступеней увеличивается. Однако такие агрегаты не только стоят дороже, но и требуют постоянного удержания тормозной жидкости под давлением. Это приводит к общему понижению мощности самого двигателя. Поэтому рациональнее устанавливать такие системы в машинах «Премиум» класса или более мощных ТС.
Это приводит к общему понижению мощности самого двигателя. Поэтому рациональнее устанавливать такие системы в машинах «Премиум» класса или более мощных ТС.
Также скорость переключения КПП этого типа во многом зависит от ее разновидности в зависимости от того, сколько сцеплений установлено в «роботе». Например, первые роботы были оборудованы только одним сцеплением. Такие системы, как раз, и создают эффект кивающей головы водителя и пассажиров, из-за того, что машина начинает дергаться при переключении КПП. Однако, если речь идет о более современных преселективных моделях, в которых присутствует два сцепления, то в этом случае провалов тяги удается избежать.
Такие коробки называются DCT (Dual Clutch Transmission). Более современные версии называются DSG (Direct Schalt Getrieb). Они представляют собой шестиступенчатые КПП, разработанные Volkswagen. Благодаря наличию двух валов (один внутри другого) удается значительно сэкономить время переключения передач (не более 8 миллисекунд на реакцию системы) и избежать рывков. Сегодня такие системы встречаются во многих иномарках.
Сегодня такие системы встречаются во многих иномарках.
Однако и тут не обошлось без негативных нюансов. Дело в том, что даже если водитель приобретает преселективную модель, то в этом случае управление КПП осуществляется исключительно за счет электрики. Поэтому при езде в сложных условиях (когда ТС часто замедляется и разгоняется) появляется риск перегрева дисков сцепления. Кроме этого, преселективные системы пока что слишком дорогие в ремонте. Хоть механическая основа и отличается высокой надежностью, в случае проблем с прошивкой блока управления может произойти серьезный сбой.
Тем не менее РКПП постоянно совершенствуются. Например, те, кто предпочитает более агрессивную езду, могут приобрести «робот мокрого типа». В этом случае вероятность перегрева сцепления снижается.
В заключении
Исходя из всего вышесказанного становится очевидно, что роботизированные системы являются очень перспективным развитием. Такие КПП обладают большим количеством плюсов и помогают значительно сэкономить на эксплуатации авто. Однако все зависит от условий езды и мощности силового агрегата. Поэтому выбирать такие системы нужно очень внимательно.
Однако все зависит от условий езды и мощности силового агрегата. Поэтому выбирать такие системы нужно очень внимательно.
Что делать, чтобы роботизированная коробка передач (ДСГ) не ломалась
«Робот» с двойным сцеплением – коробка классная, об этом скажет любой ее адепт: передачи он переключает быстрее, чем самый активный водитель, и помогает экономить топливо. Однако есть совершенно противоположный лагерь, в котором роботизированные коробки принято опасаться и ругать – из-за якобы ненадежности. Чтобы перебраться из второго в первый, нужно ознакомиться с кое-какими нюансами этого вида трансмиссии.
Грамотный подход к роботизированной коробке позволит увеличить срок эксплуатации и не бояться поломок.
Здесь вы можете прочитать про правильное пользование вариатором, а тут – про «автомат».
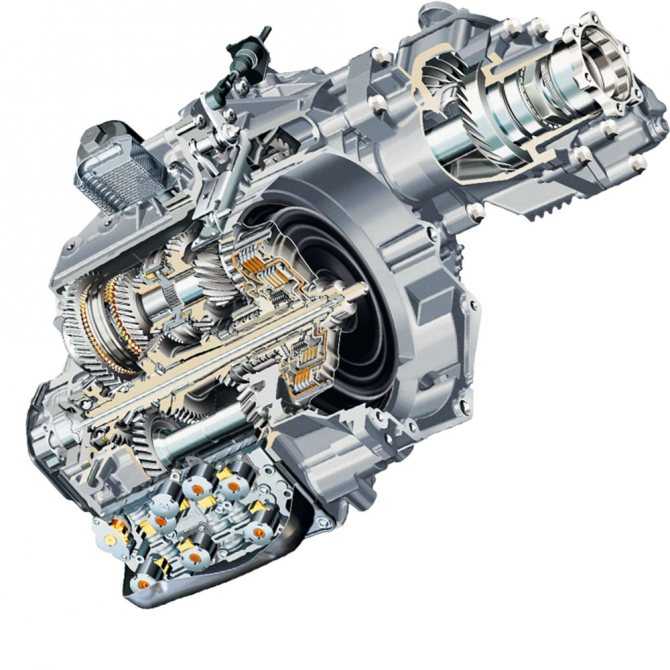
Как устроена роботизированная коробка передач
В отличие от классических гидротрансформаторных АКП роботизированные коробки передач имеют определённую схожесть с ручными трансмиссиями. У них также есть первичный и вторичный валы с шестернями, вилка сцепления, муфты синхронизаторов, сами диски сцепления с фрикционными накладками и некоторые другие родственные элементы.
Вообще, если совсем упростить для понимания, то «робот» представляет собой сильно усложнённую механическую КП, где переключениями управляет электроника и гидравлика. При этом сцеплений там аж два: пока первое включило одну передачу, второе уже заранее подоткнуло следующую. Именно поэтому такие автоматы называют преселективными (pre-selective) – они действуют с опережением. Когда одна пара шестерён разомкнулась, следующая уже задействована – машина продолжает разгон без потери скорости. Именно поэтому современные «роботы» переключаются быстрее даже самых опытных водителей на «механике» – момент перехода между передачами практически не отнимает времени. Это называется «переключение без разрыва потока мощности».
Это называется «переключение без разрыва потока мощности».
Часто «роботы» с двойным сцеплением объединяют под названием DSG (коробка прямого включения передач), хотя это коммерческое наименование характерно в основном для машин под марками из группы Volkswagen. Роботизированные коробки у других брендов могут называться DCT (трансмиссия с двойным сцеплением). Porsche тоже дистанцируется от более массовых брендов VW AG и зовет свою коробку PDK. Используются также обозначения Powershift, S-tronic и пр.
Плюсы и минусы DSG/DCT
Итак, роботизированная коробка передач имеет общий принцип работы, схожий с обычной «механикой». К плюсам ДСГ относят:
- быстрые переключения – интенсивность ускорения автомобиля выше, чем у такого же с классической АКП или «механикой»
- топливная экономичность – машина с роботом потребляет меньше топлива, чем гидротрансформаторный собрат, а самые современные образцы дают фору даже «механике».
Несмотря на очевидные плюсы, имеются и недостатки. В городском режиме эксплуатации часто появляются рывки и вибрации. Так как замыканием сцеплений управляет электроника, она не всегда способна понять, что сейчас требует от неё водитель. Отсюда – характерная нервозность роботизированных трансмиссий в рваном городском ритме движения.
Помимо плавности работы далеко преселективам до гидротрансформаторов и по надёжности. Тогда как обычная АКП способна откатать более 100 тыс. км даже без замены масла, роботизированная коробка может потребовать вмешательства уже на первых 50 тысячах пробега.
Как ездить на машине с DSG
Правила езды с роботизированной коробкой схожи с нюансами, которые следует учитывать при управлении автомобиля с обычным «автоматом».
- При включенном режиме DRIVE нельзя одновременно нажимать на педаль тормоза и газа. В некоторых машинах установлена система Launch Control, которая рассчитана на подобное периодическое использование (для сверхбыстрого старта). Но даже этой функцией не стоит пользоваться очень часто – постоянные спурты со светофоров прикончат обычного легкового «робота» довольно быстро.
 Если же такой функции в машине нет, то старт с двух педалей тем более губителен для коробки.
Если же такой функции в машине нет, то старт с двух педалей тем более губителен для коробки. - Переключение режимов DRIVE, PARKING, REVERSE следует производить только после остановки машины. В противном случае вы провоцируете срабатывание аварийного храповика (будет слышен характерный громкий хруст) и значительно сокращаете ресурс деталей роботизированной коробки.
- Начинайте движение плавно. Это актуально не только для автоматизированных коробок. Электроника и механика робота будет стабильно служить, если водитель придерживается щадящего режима стартов. Так система двойного сцепления меньше нагружается.
- Не используйте агрессивную манеру вождения с заносами и пробуксовкой. Нужно помнить, что автоматические коробки – это точно не про дрифт и дым из-под колёс. Конечно, есть настоящие спортивные роботизированные коробки передач, но в данной статье мы говорим про общий случай, когда DSG или её аналог стоит на обычном легковом автомобиле. Не стоит считать, что «Шкоду Октавию» можно водить, как «Порше 911», только потому, что и там, и там – робот.
Для езды по бездорожью используйте понижающие передачи. На участках со сложным рельефом – горки, лес, песчаная местность – требуется большой крутящий момент. В подобных условиях лучше перевести селектор в ручной режим и принудительно выбрать передачу, соответствующую скорости вашего движения. Иначе «робот» будет постоянно стремиться переключиться вверх, что в сложных условиях движения не добавит ему ресурса, а вам – проходимости.
- При движении накатом не переключайтесь на нейтральную передачу. Все современные роботизированные коробки прекрасно умеют размыкать сцепления и двигаться накатом без участия водителя.
- Если автомобиль сильно загружен или соединен с прицепом, следует выдерживать неспешную манеру езды. Подпалить сцепления здесь можно точно так же, как и на «механике». Вот только ремонт «робота» обойдётся несопоставимо дороже.
- Логика общая для любых двигателей и типов трансмиссий: после первого запуска двигаемся плавно, ускоряемся неспешно, избегаем работы двигателя во второй половине тахометра. Роботизированная коробка, как и любая другая, перед полноценной работой во всех режимах должна выйти на рабочую температуру масла.
- При застревании автомобиля лучше воспользоваться тросом
.Конечно, для начала можно попытаться выехать враскачку (через педаль тормоза и переключения между D и R). Но, во-первых, это неудобно, а во-вторых, как правило, неэффективно. Кроме того, постоянные манипуляции с передачами и газом плохо отразятся на сцеплениях и блоке управления (обычно его называют общим словом «мехатроник»).
В заключение скажем, что конструктивные особенности роботизированной коробки передач накладывают определённые обязательства на владельца автомобиля с таким типом трансмиссии. DSG и ей подобные «роботы» не любят долгой езды по бездорожью, плохо относятся к спортивным дисциплинам (если это не спорткар) и в целом более прихотливы, нежели классические автоматы. Взамен владелец получает экономию топлива и практически мгновенный отклик при резких ускорениях.
Высокоточный редуктор для робототехники Melior Motion
Узлы PSC-V / H-E
Прецизионные редукторы с малым люфтом:
Узлы PSC-V / H-E серии meliormotion®Melior Motion предлагает высокоточные редукторы, которые при люфте ≤ 0,1 угловой минуты считаются беззазорными. Благодаря нашему запатентованному решению по регулированию износа мы гарантируем, что он не изменится в течение всего срока службы.
Прецизионные редукторы с малым люфтом — эффективные и долговечные
Больше безопасности для вашего применения обеспечивают редукторы с малым люфтом благодаря высокой мощности, ускорению и моменту аварийной остановки.
Наша серия редукторов отличается исключительно высокой жесткостью на опрокидывание и кручение. Они обеспечивают точное позиционирование прямо в точку.Редукторы и элементы привода
Наши прецизионные редукторы с низким люфтом достигают особенно высокого уровня производительности благодаря одновременному зацеплению нескольких зубьев (солнечная шестерня, планетарная шестерня и зубчатый венец). Эффективность > 90% и чрезвычайно низкий пусковой момент обеспечивают выдающуюся энергоэффективность. Благодаря высокой эффективности температура трансмиссии остается стабильно низкой, что продлевает срок службы сальников, компонентов трансмиссии и смазки.
Результат – впечатляющий срок службы в 20 000 часов. Это намного больше, чем возможно с другими конструкциями прецизионных редукторов, и было подтверждено многочисленными испытаниями.
В то же время уникальная конструкция прецизионного редуктора с малым люфтом обеспечивает чрезвычайно тихую работу. Таким образом, снижается уровень шума в рабочей среде.
Не только бесшумные, но и точные, узлы эффективно работают даже при низком крутящем моменте, позволяя точно контролировать небольшие движения.
Редукторы с полым валом для прокладки кабеля
Полые валы диаметром до 75 мм позволяют, например, пропускать линии передачи данных или питания.
Конструкция редуктора нашей продукции позволяет использовать стандартные трансмиссионные масла, а также подходит для использования со смазкой, совместимой с пищевыми продуктами.
Узлы PSC-V / H-E также подходят в качестве прецизионных редукторов с выходным фланцем для узкоспециализированных применений.- Диапазон крутящего момента 400 – 4500 Нм
- Внешний диаметр 180 – 329 мм
- Диапазон соотношений: 35:1 – 200:1
Узлы PSC-V / H-E
Интегрированная конструкцияПрименение узлов PSC обычно используется в робототехнике, где соединение с двигателем может быть включено в конструкцию манипулятора робота для оптимизации пространства и затрат.
Другие области применения этого варианта конструкции можно найти в автоматизации, станкостроении, полиграфии, упаковочных машинах, поворотных столах, медицинской технике и т. д.
Полностью закрытые редукторы PSC-V / H-B
Планетарный редуктор со встроенной конической ступенью: Полностью закрытые редукторы PSC-B.
Наш ряд планетарных редукторов PSC-B готов к монтажу. Они стандартно заполнены маслом на минеральной основе. Наиболее распространенные серводвигатели легко адаптируются через различные интерфейсы. Полностью разработанное расположение сателлитов вокруг солнечной шестерни и встроенная косозубая ступень шестерни обеспечивают немедленное зацепление зубьев. Таким образом, пусковой момент чрезвычайно низок. Это приводит к лучшей управляемости системы.
Точность и компактность: полностью закрытые редукторы meliormotion® PSC
Наши планетарные редукторы характеризуются высоким выходным, ускоряющим и аварийным крутящим моментом.
Это повышает безопасность приложения. Огромная жесткость на наклон и кручение обеспечивает точное позиционирование.Долгий срок службы редукторов PSC-V/H-B
Длительный срок службы всех компонентов и смазочных материалов в 20 000 часов очень важен для наших клиентов.
Кроме того, высокий КПД > 90% гарантирует, что температура в редукторе остается постоянной на очень низком уровне.Планетарные передачи для высочайшей точности в вашем приложении
Редукторы PSC-V/H-B доступны в исполнении со сплошным и полым валом и после смазки не требуют дополнительной замены масла в течение всего срока службы, что обеспечивает минимальные эксплуатационные расходы.
Линии передачи данных или линии питания могут быть проложены через полые валы диаметром до 75 мм. При желании мы можем предложить дополнительные угловые решения. Наши планетарные редукторы используются во многих областях, в том числе; автоматизация, станки, печатные и упаковочные машины, поворотные столы и медицинская техника, среди прочего.
- Диапазон крутящего момента 400 – 4500 Нм
- Внешний диаметр 180 – 329 мм
- Диапазон соотношений: 35:1 – 200:1
Специальный редуктор PSD
Роботизированные редукторы специального назначения
Этот специальный роботизированный редуктор изначально был разработан для использования в роботах Delta. Сегодня наши специальные и роботизированные редукторы используются почти во всех областях с очень специфическими требованиями. Они сочетают высочайшую точность с быстрым обратным движением. Прецизионный редуктор PSD можно легко отрегулировать в зависимости от веса продукта и различных путей захвата и размещения. Наши клиенты могут рассчитывать на большое количество циклов и короткие, быстрые реверсивные движения с одновременным высоким рабочим циклом.
Роботизированные редукторы от Melior Motion: неизменно высокая точность
Уникальная запатентованная конструкция редуктора обеспечивает очень низкий люфт ≤ 0,5 угловых минут, который также остается постоянным на протяжении всего срока службы редуктора.
 Достигается входная скорость до 6000 об/мин, и возможна чрезвычайно высокая точность редуктора даже в диапазоне низких крутящих моментов и небольших перемещений. Предлагаемый диапазон соотношения составляет 20:1 … 50:1.
Достигается входная скорость до 6000 об/мин, и возможна чрезвычайно высокая точность редуктора даже в диапазоне низких крутящих моментов и небольших перемещений. Предлагаемый диапазон соотношения составляет 20:1 … 50:1.Шестерни прецизионно отшлифованы. Корпус изготовлен из высококачественного алюминиевого сплава. Этому способствует небольшой вес редуктора в 7,5 килограмма. Для обеспечения максимально возможного качества мы используем исключительно высококачественные подшипники.
Преимущества специального редуктора PSD – ваша дополнительная ценность
Компактная конструкция нашего специального редуктора PSD обеспечивает продуманную конструкцию системы. Уровень шума при работе Монтаж двигателя осуществляется индивидуально через переменный интерфейс, что позволяет легко адаптировать обычные серводвигатели. Техническое обслуживание не требуется из-за смазки на весь срок службы. Кабели и питающие линии могут быть проложены через полый вал.
 В качестве альтернативы он также доступен в версии со сплошным валом.
В качестве альтернативы он также доступен в версии со сплошным валом.Характеристики и преимущества серии PSD
ХАРАКТЕРИСТИКИ ПРЕИМУЩЕСТВА Очень низкий люфт Постоянная точность на протяжении всего срока службы Компактный дизайн Умный дизайн окружающей среды Низкий уровень шума Низкий уровень шума в рабочей среде Низкое трение Более высокая энергоэффективность Высокая жесткость Обеспечивает точное позиционирование Высокая эффективность Пониженное энергопотребление Редуктор с полым валом Для прохода питающих линий или для центрирования Двигатель в сборе с фланцем двигателя и муфтой Простая адаптация обычных серводвигателей Специальная конструкция редуктора обеспечивает быстрое изменение направления S1 Операция возможна Смазка на весь срок службы Не требует обслуживания
Редукторы по индивидуальному заказу
Прецизионные редукторы на заказ
Мы также разрабатываем и производим высокоточные автоматические редукторы индивидуально в соответствии с требованиями заказчика, состоящие из ступени планетарной, косозубой или конической ступени.
 Наши проектные группы и команды разработчиков последовательно реализуют инновационные концепции. Это дает нашим клиентам индивидуальные приводы автоматизации для их индивидуальных приложений — с безопасностью благодаря контролируемым и установленным процессам разработки, проверки и производства.
Наши проектные группы и команды разработчиков последовательно реализуют инновационные концепции. Это дает нашим клиентам индивидуальные приводы автоматизации для их индивидуальных приложений — с безопасностью благодаря контролируемым и установленным процессам разработки, проверки и производства.Специальные прецизионные редукторы для промышленного применения
Также для индивидуальных решений мы предлагаем редукторы с особо малым люфтом. Это демонстрируют наши примеры для роботизированных приложений: Наша специальная коробка передач SP191 представляет собой роботизированную коробку передач с очень малым люфтом, который остается постоянным при ≤ 0,1 угловой минуты. Редуктор с полым валом диаметром 80 мм идеально подходит для передачи данных или линий питания. Максимальный крутящий момент составляет 2000 Нм.
Мы индивидуально адаптируем размер редуктора к конкретным требованиям заказчика. Это, конечно, не только для роботизированных коробок передач, а для всех коробок передач по индивидуальному заказу. Другой пример: привод позиционирования СП224. Точность позиционирования составляет +/- 0,03 мм. Этот редуктор также имеет особенно низкий люфт ≤ 0,1 угловой минуты в течение всего срока службы.
Другой пример: привод позиционирования СП224. Точность позиционирования составляет +/- 0,03 мм. Этот редуктор также имеет особенно низкий люфт ≤ 0,1 угловой минуты в течение всего срока службы.Редукторы для линейной оси
Еще одним узкоспециализированным примером является наш редуктор для линейных перемещений, оснащенный выходными шестернями для реечной передачи. Передаточное отношение 10:1. Редуктор со сплошным валом имеет люфт
Таким образом, роботы и детали надежно достигают своей цели. И, конечно же, наши редукторы автоматизации, изготовленные по индивидуальному заказу, отличаются высокой динамикой и высокой точностью. В сочетании с длительным сроком службы они подходят для всех областей применения, например, для захвата и перемещения в погрузочно-разгрузочной технике.
Наши прецизионные редукторы по индивидуальному заказу – ваши преимущества с первого взгляда
- Лучше всего подходит предложение услуг для вашей функции
- Безопасность благодаря установленным и постоянно совершенствуемым процессам разработки, проверки и производства
- Надежность благодаря многочисленным рекомендациям во многих отраслях
- Скорость в реализации проекта обеспечивает ваше конкурентное преимущество
[PDF] Компактные редукторы для современной робототехники: обзор
- title={Компактные редукторы для современной робототехники: обзор},
автор = {Пабло Л {\ ‘о} пез-Гарк {\ ‘и} а, Стейн Криспель, Элиас Серенс, Том Верстратен и Дирк Лефебер},
journal={Рубежи робототехники и ИИ},
год = {2020},
громкость={7}
}
- Пабло Лопес-Гарсия, Стейн Криспель, Д.
 Лефебер
Лефебер - Опубликовано 14 августа 2020 г.
- Информатика
- Границы в робототехнике и ИИ жизни, производительность роботизированных устройств HRI по-прежнему сильно зависит от их редукторов. В большинстве промышленных роботов обычно встречаются две относительно нетрадиционные технологии передачи — Harmonic Drives© и Cycloid Drives, которые не так широко используются в других отраслях. Понимание происхождения этой сингулярности дает ценную информацию для поиска подходящих будущих технологий роботизированной трансмиссии. В…
См. в PubMed
frontiersin.orgR2poweR: проверка концепции редуктора с обратным приводом и высоким передаточным числом для совместной работы человека и робота*
Инженеры-робототехники сталкиваются с серьезными трудностями при решении сложных задач приведения в действие совместной работы человека и робота с действующими роботизированными коробками передач. Доступные технологии включают планетарные передачи с высоким передаточным числом…
Новый редуктор на основе Wolfrom для приводов роботов
Представлен новый тип составных планетарных зубчатых передач, основанный на топологии Wolfrom, который можно использовать для повышения производительности редуктора в целом.
 , т. е. увеличить его эффективность, уменьшить его инерцию, увеличить его крутящий момент и т. д.
, т. е. увеличить его эффективность, уменьшить его инерцию, увеличить его крутящий момент и т. д.Разработка прототипа и анализ эффективности привода нового робота на основе топологии 3K-H-V роботов, а приводы роботов напрямую влияют на работу приводов роботов. С развитием робототехники к роботам предъявляются более высокие требования…
Проектирование, исследование и экспериментальная характеристика роботизированного манипулятора с 6 степенями свободы, приводимого в действие полуделокализованными магнитореологическими приводами с тросовым приводом
Коллаборативные роботы должны тесно и безопасно работать с пользователями, будучи быстрыми и сильными. Удовлетворение обеих этих потребностей одновременно представляет собой серьезную проблему, если не препятствие, для…
Дизайн и характеристика 3D-печатных приводов с открытым исходным кодом для движения ногами
- Картик Урс, Чаллен Эннинфул Аду, Э. Роуз, Т. Мур
Инженерное дело
ArXiv
- 2022
Впечатляющие возможности передвижения животных обусловлены совместной эволюцией морфологии скелета и мышечных свойств.
 Производительность роботов на ногах также, вероятно, выиграет от…
Производительность роботов на ногах также, вероятно, выиграет от…Исследование точности манипулятора робототехнического комплекса, построенного на базе циклоидальной передачи
Математическая модель построения передачи и определение точности поворотного узла для наземного робототехнического комплекса, с использованием циклоидальной передачи без промежуточного звена исследуются и разрабатываются тела качения, что позволяет повысить технический уровень робототехнических комплексов.
Интеграция и тестирование высокомоментного сервоприводного шарнира и его электронного контроллера с применением в прототипе экзоскелета верхней конечности
- М. Велес-Герреро, М. К. Куэрво, С. Маццолени
Инженерное дело
Датчики
- 2021
в соответствии с предлагаемым протоколом испытаний, что позволяет использовать этот подход в различных приложениях, связанных с роботизированными экзоскелетами, включая повышение производительности человека, реабилитацию или поддержку повседневной жизнедеятельности.

Планетарный редуктор, напечатанный на 3D-принтере для шарниров роботизированной руки
Технология 3D-печати стала очень популярной в последние несколько лет как дешевый способ изготовления различных деталей. 3D-печать является идеальным инструментом для прототипирования различных, в основном сложных,…
Жесткие прецизионные редукторы для обработки промышленных роботов
Обзор жестких прецизионных редукторов для обрабатывающих роботов показывает, что циклоидный редуктор является лучшим кандидатом среди прецизионных редукторов, учитывая как структурное соответствие, так и кинематическая точность обработанных роботов.
Проблемы и решения для применения и более широкого внедрения носимых роботов
Целью этой статьи является решение текущих проблем, которые ограничивают применение и более широкое внедрение носимых роботов, которые обычно носят на человеческом теле.
ПОКАЗАНЫ 1-10 ИЗ 155 ССЫЛОК
СОРТИРОВАТЬ ПОРелевантности Наиболее влиятельные статьиНедавность
Адаптация планетарных зубчатых передач для помощи и воспроизведения человеческих конечностей
- П.
 Л. Гарсия, Штайн Вандерборт, Б.
Л. Гарсия, Штайн Вандерборт, Б. Engineering
MATEC Web of Conferences
- 2019
В этом документе представлены прототип и связанные с ним первые результаты испытаний концепции Wolfrom alpha-I, новой концепции, которая демонстрирует прикладной потенциал планетарных зубчатых передач на основе Wolfrom. в приводе HRI и раскрывает потенциал практически неиспользованного вида планетарных зубчатых передач.
Подшипниковый привод: новый компактный привод для роботизированных шарниров
- Elias Brassitos, C. Mavroidis, B. Weinberg
Инженерное дело
- 2013
Передовая робототехника требует нового поколения приводов, способных демонстрировать ряд желательных характеристик, начиная от высокой удельной мощности и высокой эффективности, высокого позиционирования разрешение, высокое…
Представляем составные планетарные передачи (C-PGT): компактный способ достижения высоких передаточных чисел для носимых роботов
Показано, что механизм C-PGT может обеспечивать передаточное число до 1:600, выдерживая выходной крутящий момент 100 Нм, и такой подход приводит к большим и тяжелым коробкам передач, когда требуется высокий крутящий момент.

Требования к безопасным роботам: измерения, анализ и новые идеи
Дан обзор систематической оценки безопасности при взаимодействии человека и робота, охватывающий различные аспекты наиболее значимых механизмов травм, в том числе проблему квазистатического ограниченного воздействие, которое при определенных обстоятельствах может представлять серьезную угрозу для человека даже для малоинерционных роботов.
Использование динамики естественной нагрузки с приводами с переменным передаточным числом
Результаты показывают, что активное изменение передаточного числа с использованием предложенных алгоритмов управления может привести к уменьшению на порядок необходимых крутящего момента и мощности привода, а также повысить устойчивость к возмущениям.
Оптимизация трансмиссии для промышленных роботов
В этом документе представлена стратегия оптимизации для поиска компромисса между стоимостью, сроком службы и производительностью при проектировании трансмиссии, т.
 е. редукторов и электродвигателей, для новых концепций роботов, и показано, как Задача проектирования может быть формализована как задача оптимизации.
е. редукторов и электродвигателей, для новых концепций роботов, и показано, как Задача проектирования может быть формализована как задача оптимизации.Новый подход к созданию безопасных для человека роботов
- Майкл Р. Зинн, Бернард Рот, О. Хатиб, Дж. Солсбери
Инженерия
Международная конференция IEEE по робототехнике и автоматизации, 2004 г. Труды. ИКРА ’04. 2004
- 2004
Показано, что за счет резкого снижения эффективного импеданса манипулятора при сохранении возможности высокочастотного крутящего момента конкурирующие конструктивные требования к производительности и безопасности могут быть успешно интегрированы в единую манипуляционную систему.
Обзор принципов энергоэффективного передвижения роботов
- Навваб Кашири, Энди Абате, Н. Цагаракис
Инженерное дело
Фронт. Робот. AI
- 2018
Рассмотрен ряд подходов к управлению, позволяющих обеспечить энергоэффективное передвижение роботов за счет использования естественной динамики системы и использования оптимальных подходов к управлению, ориентированных на затраты на передвижение.

Законы масштабирования для роботизированных трансмиссий
Выбор моторной коробки для энергоэффективности
- D. Dresscher, T. D. Vries, S. Stramigioli
Engineering, Computer Science
2016 IEEE International Conference On Advanced Intelendent Mechatronics (AIM)
- 2016 9001 2
- Влияние передачи на выходной крутящий момент и скорость двигателя. Обычно шестерни используются для уменьшения скорости и увеличения крутящего момента.
- Неэффективность передачи мощности – эффективность каждой ступени зубчатой передачи или цепи составляет примерно 90 %.
- Различия между теоретической и фактической производительностью. Поскольку теоретические характеристики обычно лучше, чем фактические, даже с учетом неэффективности, важно выбирать двигатели и передаточные числа с приемлемым коэффициентом безопасности. То есть убедитесь, что они смогут обрабатывать больше ожидаемой нагрузки на более высокой, чем требуется, скорости.
- Количество тока, которое может потреблять один двигатель, ограничено автоматическими выключателями на распределительном щите.
 При использовании выключателя на 40 ампер потребление тока ограничено максимальным значением 40 ампер, а это означает, что вы должны спроектировать двигатели так, чтобы они потребляли менее 40 ампер при ожидаемой нагрузке. Кроме того, робот может одновременно потреблять не более 120 ампер, что ограничивается главным автоматическим выключателем.
При использовании выключателя на 40 ампер потребление тока ограничено максимальным значением 40 ампер, а это означает, что вы должны спроектировать двигатели так, чтобы они потребляли менее 40 ампер при ожидаемой нагрузке. Кроме того, робот может одновременно потреблять не более 120 ампер, что ограничивается главным автоматическим выключателем. - Работающие двигатели с нагрузкой останова или близкой к ней, максимальный крутящий момент, который они могут выдавать, приведет к их возгоранию, поскольку большая часть энергии, подаваемой на двигатель, будет преобразована в тепло. Количество тепла, которое может выдержать двигатель, напрямую связано с его общей массой. По этой причине у тяжелых двигателей, таких как CIM, гораздо меньше шансов сгореть, чем у более мелких, таких как двигатели Fisher Price.
- Если ни один двигатель не соответствует вашим требованиям, рассмотрите возможность сопряжения двигателей. При объединении двух двигателей выходной крутящий момент и потребляемый ток складываются, а выходная скорость не изменяется.
 Если два разных двигателя согласовываются друг с другом, их свободные скорости должны быть согласованы с помощью редуктора. Например, сочетание двигателя Fisher Price и CIM потребует дополнительного передаточного числа 3:1 для двигателя Fisher Price, поскольку его выходная скорость примерно в 3 раза выше, чем у CIM. Если выходные скорости не совпадают, это вызовет дополнительное сопротивление в редукторе и сведет на нет все преимущества наличия нескольких двигателей.
Если два разных двигателя согласовываются друг с другом, их свободные скорости должны быть согласованы с помощью редуктора. Например, сочетание двигателя Fisher Price и CIM потребует дополнительного передаточного числа 3:1 для двигателя Fisher Price, поскольку его выходная скорость примерно в 3 раза выше, чем у CIM. Если выходные скорости не совпадают, это вызовет дополнительное сопротивление в редукторе и сведет на нет все преимущества наличия нескольких двигателей.
903 В работе представлена основанная на модели процедура выбора мотор-редуктора с акцентом на ключевые механизмы рассеивания энергии и сделан вывод о том, что выбор комбинации мотор-редуктор с точки зрения энергоэффективности может обеспечить значительное повышение эффективности.

За дизайном | Понимание конструкции двигателя и редуктора — блог Blue Alliance
Ян Уолтерс
Особая благодарность AutodeskЗачем тратить время на выбор правильного двигателя и редуктора?
Выбор правильной комбинации двигателя и редуктора для конкретного применения очень важен как в FIRST Robotics Competition (FRC), так и в реальных инженерных проектах
. Без соответствующих комбинаций мотор-редуктор ваша команда обнаружит, что ваш робот не работает так быстро и эффективно, как предполагалось, и может
имеют склонность к выгоранию двигателей.В этом учебном пособии вы познакомитесь с основами проектирования и реализации редуктора. Во-первых, я научу вас характеристикам двигателя. Далее я расскажу, как выбрать двигатель
и передаточное число с учетом требований применения. Затем я предоставлю информацию о выборе редуктора, а затем обзор двигателей и редукторов
, доступных в FRC. Наконец, я покажу, как использовать то, что вы узнали из этого руководства, на примере задачи и укажу на дополнительные инструменты и ресурсы, если вы хотите изучить
больше.
Это руководство создано в рамках программы Autodesk FIRST High School Intern.
Предпосылки
– Базовое понимание физики – напр. системы силы, крутящего момента, мощности и зубчатой передачи
– Готовность учитьсяХарактеристики двигателя
Существует несколько важных характеристик двигателей, которые предоставляют информацию о двигателе и его возможностях. Это выходной крутящий момент двигателя, потребляемый им ток, его выходная скорость, его мощность и его эффективность, каждый из которых я буду обсуждать по очереди. Эти характеристики взаимозависимы и могут быть получены из четырех значений: крутящий момент двигателя, ток останова, свободный ток и скорость холостого хода.
Крутящий момент
Выходной крутящий момент двигателя — это сила, с которой может вращаться его выходной вал. Если к двигателю приложен слишком большой крутящий момент, его выходной вал заглохнет или перестанет вращаться.
 Другие характеристики двигателя обычно записываются как функция крутящего момента. Обычно он измеряется в Нм, когда требуются метрические единицы, и в унциях-дюймах, когда требуются английские единицы.
Другие характеристики двигателя обычно записываются как функция крутящего момента. Обычно он измеряется в Нм, когда требуются метрические единицы, и в унциях-дюймах, когда требуются английские единицы.Потребляемый ток
Потребляемый двигателем ток — это величина электрического тока, потребляемого двигателем при любой заданной нагрузке. По мере увеличения нагрузки на двигатель (крутящий момент) величина тока, потребляемого двигателем, увеличивается линейно. Это отношение можно записать как
(1) Символ Имя Единицы Описание я Текущий Ампер (А) Величина тока, потребляемого двигателем Исталь Ток остановки Ампер (А) Величина тока, потребляемого при остановке двигателя Ифри Свободный ток Ампер (А) Величина тока, потребляемого двигателем без нагрузки τ стойло Тормозной момент Ньютон-метры (Н-м) Величина крутящего момента, необходимая для остановки двигателя т Момент затяжки Ньютон-метры (Н-м) Величина крутящего момента, приложенного к выходному валу двигателя Скорость
Выходная скорость двигателя — это скорость вращения, с которой вращается выходной вал.
 По мере увеличения нагрузки на двигатель выходная скорость уменьшается линейно. Это отношение можно записать как
По мере увеличения нагрузки на двигатель выходная скорость уменьшается линейно. Это отношение можно записать как(2) Символ Имя Единицы Описание ω Скорость Выстрелов в минуту (об/мин) Скорость вращения выходного вала двигателя ω свободный Свободная скорость Выстрелов в минуту (об/мин) Скорость вращения двигателя без нагрузки τ стойло Тормозной момент Ньютон-метры (Н-м) Величина крутящего момента, необходимая для остановки двигателя или предотвращения вращения его выходного вала т Момент затяжки Ньютон-метры (Н-м) Величина крутящего момента, приложенного к выходному валу двигателя Фото: http://www.
 engin.umich.edu/group/ctm/examples/motor/motor.html
engin.umich.edu/group/ctm/examples/motor/motor.htmlМощность
Выполнять работу. По сути, это измерение того, насколько быстро двигатель может выполнять работу. Его значение в ваттах определяется уравнением
(3) Символ Имя Единицы Описание П Мощность Вт Количество энергии, подаваемой двигателем т Момент затяжки Ньютон-метры (Н-м) Величина крутящего момента, приложенного к выходному валу двигателя ω Скорость Выстрелов в минуту (об/мин) Скорость вращения выходного вала двигателя КПД
КПД двигателя — это показатель того, сколько электрической энергии, подаваемой в двигатель, преобразуется в механическую энергию.
 Большая часть оставшейся энергии преобразуется в тепло, что может привести к перегоранию двигателя, если он работает с крутящим моментом/об/мин, при которых его КПД очень низок. Эффективность определяется уравнением
Большая часть оставшейся энергии преобразуется в тепло, что может привести к перегоранию двигателя, если он работает с крутящим моментом/об/мин, при которых его КПД очень низок. Эффективность определяется уравнением(4) Символ Имя Единицы Описание η Эффективность Процент (%) Процент подводимой к двигателю электрической энергии, которая преобразуется в полезную механическую энергию Путь Выходная мощность Вт Выходная мощность двигателя при заданном крутящем моменте и скорости Штифт Потребляемая мощность Вт Количество электроэнергии, подаваемой на двигатель я Текущий Ампер (А) Величина тока, потребляемого двигателем В Напряжение Вольт (В) Напряжение, при котором работает двигатель Фото: http://www.
 engin.umich.edu/group/ctm/examples/motor/motor.html
engin.umich.edu/group/ctm/examples/motor/motor.htmlКривые двигателя КПД часто наносят на график в зависимости от выходного крутящего момента, чтобы упростить визуализацию их значений. Все уравнения для этих кривых получены из четырех описанных выше спецификаций с использованием уравнений с 1 по 4 на предыдущих нескольких страницах.
График на этой странице показывает характеристики двигателя CIM, который очень часто используется в FRC.
Выбор двигателя и передаточного числа
Теперь, когда вы понимаете характеристики, отличающие двигатели, вы можете работать над выбором двигателя и передаточного числа для вашего приложения. Какой двигатель наиболее подходит для данной работы, полностью зависит от требований приложения. Это означает, что вы должны определить конечные результаты, например, насколько большой груз вы перемещаете и как быстро вы хотите, чтобы он перемещался, а затем преобразовать их в требования, такие как выходной крутящий момент и скорость.
Начните с изучения характеристик доступных двигателей. Спецификация двигателя для сезона FRC 2012 г. включена на эту страницу. При выборе двигателя и передаточного числа необходимо учитывать множество факторов, в том числе:
Принимая во внимание все эти факторы в своих расчетах при выборе двигателя и передаточного числа, вы гарантируете, что ваш робот будет работать так, как вы задумали, с первого раза. Пример задачи в конце этого урока продемонстрирует, как пройти процесс выполнения этих вычислений.
Доступные двигатели
В этом разделе руководства описываются некоторые общие сценарии использования различных двигателей, допущенных к участию в FIRST Robotics Competition.
Название двигателя Изображение Примечания Серия RS-500:
AndyMark 9015
Fisher Price
BaneBots RS-550Все эти три двигателя очень похожи — единственными отличительными факторами являются их технические характеристики.  Как правило, они используются в манипуляторах, таких как приводное колесо качки, лифт или система конвейера/коллектора.
Как правило, они используются в манипуляторах, таких как приводное колесо качки, лифт или система конвейера/коллектора.БейнБотс RS-775 RS-775 — это более крупная и мощная версия двигателей серии RS-500. Он также широко используется для манипуляторов. Тем не менее, двигатели RS-775 имеют историю развития коротких замыканий корпуса, из-за чего некоторые команды избегают их использования. МГК CIM — самый большой, самый мощный и самый надежный двигатель, поставляемый командам FRC. Поскольку командам разрешено использовать только 4 из них, они должны быть закреплены за трансмиссией, где их мощность и надежность наиболее необходимы. Denso (мотор стеклоподъемника) Оконный мотор — это мотор, к которому прикреплен червячный редуктор. Его высокий крутящий момент и низкая скорость часто используются в манипуляторах. Из-за червячного привода их нельзя вернуть назад, что желательно для некоторых приложений. 
Векс 393 Vex 393 — новый мотор сезона 2012 года. По этой причине он не нашел большого применения. Однако его небольшой размер и относительно высокий крутящий момент делают его подходящим для второстепенных функций в манипуляторах. По мере того, как команды будут лучше знакомиться с ним, этот двигатель, вероятно, найдет более широкое применение в большем количестве приложений. Фото:
http://www.andymark.com/product-p/am-0316.htm
http://www.andymark.com/product-p/am-0912.htm
http: //www.o-digital.com/uploads/2179/2188-1/DC_Motor_RS_775_7712_197.jpg
http://www.andymark.com/CIM-motor-FIRST-p/am-0255.htm
http:// www.usfirst.org/sites/default/files/uploadedFiles/Robotics_Programs/FRC/Game_and
_Season__Info/2012_Assets/KickoffKitChecklistRev_A.pdf
http://www.vexrobotics.com/products/accessories/motion/276-2177.htmlВыбор коробки передач
Теперь, когда вы выбрали двигатель и передаточное число, вам нужно выбрать коробку передач.
 Первым требованием при выборе редуктора является то, что выбранный двигатель должен подходить к редуктору. Хотя большинство двигателей имеют уникальную схему расположения болтов, двигатель BaneBots RS-550, двигатель Fisher Price и двигатель AndyMark 9015 относятся к серии двигателей RS-500 и, следовательно, имеют одинаковую схему крепления.
Первым требованием при выборе редуктора является то, что выбранный двигатель должен подходить к редуктору. Хотя большинство двигателей имеют уникальную схему расположения болтов, двигатель BaneBots RS-550, двигатель Fisher Price и двигатель AndyMark 9015 относятся к серии двигателей RS-500 и, следовательно, имеют одинаковую схему крепления.Далее, коробка передач должна иметь выбранное вами передаточное число. Однако в этом требовании больше свободы действий. Некоторые редукторы могут быть «собраны» вместе, создавая большие сокращения. Кроме того, не все уменьшение должно происходить в коробке передач, вместо этого его можно обеспечить с помощью систем передачи мощности, таких как звездочки и цепь. Также возможно, что точная передача, которую вы хотите, недоступна, и в этом случае достаточно близко.
Наконец, коробка передач должна иметь выходной вал, который можно использовать. Хотя наиболее распространены шпоночные валы различных размеров, шестигранные валы становятся все более популярными в FRC.
 Существует также множество различных ступиц для различных типов выходных валов. В конечном счете, это наименее ограничительное требование при выборе коробки передач.
Существует также множество различных ступиц для различных типов выходных валов. В конечном счете, это наименее ограничительное требование при выборе коробки передач.Доступные редукторы
В следующем разделе приведен список часто используемых редукторов, совместимых с обычными двигателями.
Название двигателя Совместимые коробки передач Серия RS-500:
AndyMark 9015
Fisher Price
BaneBots RS-550Banebots RS-500 Planetary
AndyMark CIM-Sim
AndyMark 3 Stage Toughbox
AndyMark Planetary
AndyMark Double Doozy PlanetaryБейнБотс RS-775 Планетарная передача BaneBots RS-700
Планетарная передача AndyMark PG71МГК Жесткий ящик ЭндиМарка
AndyMark Toughbox Mini
AndyMark Toughbox Nano
AndyMark 3 Stage Toughbox
AndyMark CIMple Box
AndyMark Shifter
AndyMark Super ShifterФото предоставлено: http://www.
 andymark.com/product-p/am-0114.htm
andymark.com/product-p/am-0114.htmИспользование того, что мы узнали
Процесс проектирования коробки передач. На приведенном выше рисунке показано изображение двухступенчатого лифта, элемента манипулятора, обычно используемого в FRC. Задача состоит в том, чтобы спроектировать редуктор, способный приводить в движение лебедку диаметром 3 дюйма и поднимать лифт на максимальную высоту 84 дюйма за 1,5 секунды. Для решения задачи сделаем два основных упрощения: во-первых, предположим, что 18-фунтовая нагрузка действует на весь ход лифта, тогда как в действительности лебедка должна поднимать вес первой ступени только на половину пути. расстояния. Во-вторых, мы будем игнорировать время разгона и торможения, так как эти расчеты выходят за рамки данного руководства.
Сначала мы переведем все единицы измерения в метрические, потому что с метрическими единицами намного проще работать.
Далее мы должны превратить наши конечные цели в требования, которые можно использовать для выбора двигателя и передаточного числа.
Расчет требуемой скорости вращения лебедки:
Количество оборотов для подъема элеватора:
Расчет нагрузки на лебедку:Теперь мы должны выбрать двигатель и передаточное число. Мы начнем с рассмотрения технических характеристик доступных двигателей и предположим, какой двигатель может подойти для этой работы. Мы попробуем использовать один BaneBots RS-550 в качестве отправной точки из-за его высокой мощности, что означает, что он сможет выполнять работу быстрее. Кроме того, он обычно используется в подобных приложениях, а это означает, что он, вероятно, хорошо подходит для работы в целом. Чтобы упростить оценку, я сделал график кривой двигателя для RS-550.
Во-первых, мы хотим убедиться, что двигатель не потребляет более 40 А и не перегорает автоматический выключатель. Глядя на график, мы можем визуально увидеть, что RS-550 потребляет 40 А при нагрузке 0,23 Нм. потребляемый ток 20 А. Снова взглянув на график, мы видим, что это соответствует крутящему моменту 0,115 Нм.
 Теперь мы можем рассчитать уменьшение, которое нам потребуется для достижения необходимого крутящего момента в 3,05 Нм.
Теперь мы можем рассчитать уменьшение, которое нам потребуется для достижения необходимого крутящего момента в 3,05 Нм.
Передаточное отношение:
Теперь мы выбрали передаточное число 26:1, что означает, что мы можем рассчитать точную нагрузку, с которой должен столкнуться наш двигатель лифта.
Нагрузка на двигателе:
Теперь мы можем использовать уравнение (1) из «Характеристики двигателя» для расчета тока, который, как мы ожидаем, потребляет RS-550 при этой нагрузке: находится в допустимых пределах 40 А. Затем мы определим скорость вращения выходного вала редуктора, используя уравнение (2). На этом этапе расчетов мы учтем КПД редуктора 75%.
Motor Speed:
Теперь мы можем проверить, позволит ли выбранное нами передаточное число достичь желаемой выходной скорости, 357 об/мин.
Скорость редуктора:
Наконец, теперь, когда мы убедились, что наше передаточное число удовлетворяет нашим требованиям, мы можем рассчитать, сколько времени потребуется двигателю, чтобы поднять лифт.
Время подъема:
Теперь мы полностью убедились, что наш двигатель RS-550 и коробка передач 26:1 достигнут наших первоначальных целей или даже превзойдут их. Поскольку реальная производительность часто хуже теоретической производительности, целесообразно «перепроектировать» эти системы. Это также гарантирует, что наши упрощения не приведут к тому, что наша система будет работать намного хуже, чем ожидалось.Когда вы впервые проходите этот процесс, вам, возможно, придется выполнять расчеты несколько раз, когда вы пробуете разные двигатели и передаточные числа. По мере приобретения опыта вы интуитивно будете понимать, какие двигатели и передаточные числа лучше всего подходят для работы.
Последним шагом в этом процессе является выбор коробки передач. В этом примере выбор версии RS-550 коробки передач Banebot P60 с передаточным числом 26:1 имеет большой смысл. Он не только совместим с нашим двигателем, но также имеет правильный редуктор и обычный выходной вал со шпонкой 0,5 дюйма.
Надеемся, что этот пример задачи помог вам понять процесс выбора двигателя и редуктора. Кроме того, я надеюсь, что он показал вам, как правильно применять теорию, которую вы изучили ранее в этом руководстве.
Ссылки
Этот раздел руководства предназначен для предоставления некоторых дополнительных ресурсов для изучения двигателей и редукторов, а также некоторых инструментов, которые могут ускорить процесс проектирования. Однако НЕ используйте инструменты вместо понимания теории. Вместо этого используйте их, потому что вы проверили их на своих собственных расчетах и потому что вы понимаете, как они работают.
Калькулятор конструкции Джона В-Нейна. Эта таблица может значительно ускорить процесс выбора двигателя и передаточного числа. Однако используйте его только после того, как вы поймете теорию, лежащую в основе расчетов.
ПЕРВАЯ ВСТРЕЧА С ФИЗИКОЙ: В этом уроке изучаются некоторые фундаментальные понятия физики, встречающиеся в FRC.

- Пабло Лопес-Гарсия, Стейн Криспель, Д.