Как работает роботизированная коробка передач — ДРАЙВ
Чтобы ответить на этот вопрос, придётся вспомнить устройство обычной механической коробки передач. Основу классической «механики» составляют два вала — первичный (ведущий) и вторичный (ведомый). На первичный вал через механизм сцепления передаётся крутящий момент от двигателя. Со вторичного вала преобразованный момент идёт на ведущие колёса. И на первичный, и на вторичный валы посажены шестерни, попарно находящиеся в зацеплении. Но на первичном шестерни закреплены жёстко, а на вторичном — свободно вращаются. В положении «нейтраль» все вторичные шестерни прокручиваются на валу свободно, то есть крутящий момент на колёса не поступает.
Перед включением передачи водитель выжимает сцепление, отсоединяя первичный вал от двигателя. Затем рычагом КПП через систему тяг на вторичном валу перемещаются специальные устройства — синхронизаторы. При подведении муфта синхронизатора жёстко блокирует на валу вторичную шестерню нужной передачи.
Упрощённая схема работы 5-ступенчатой механической коробки передач.
Принцип действия роботизированных коробок передач абсолютно тот же. Единственное отличие в том, что смыканием/размыканием сцепления и выбором передач в «роботе» занимаются сервоприводы — актуаторы. Чаще всего это шаговый электромотор с редуктором и исполнительным механизмом. Но встречаются и гидравлические актуаторы.
Роботизированная КПП SensoDrive применяется на автомобилях марки Citroen.
Управляет актуаторами электронный блок. По команде на переключение первый сервопривод выжимает сцепление, второй перемещает синхронизаторы, включая нужную передачу. Затем первый плавно отпускает сцепление.
Фирма Ricardo на примере «робота» Easytronic от модели Opel Corsa предложила заменить раздельные актуаторы для сцепления и выбора передачи одиночным электромагнитным актуатором. Благодаря этому уменьшились размеры и масса агрегата. И самое главное — механизм выбора передачи стал работать в восемь раз быстрее, а общий период разрыва потока мощности сократился до 0,35 с. Вверху — серийный Easytronic, внизу — рисунок разработки Ricardo.
Проблема «робота» — отсутствие обратной связи по сцеплению. Человек чувствует момент смыкания дисков и может переключить скорость быстро и плавно. А электроника вынуждена перестраховываться: чтобы избежать рывков и сохранить сцепление, «робот» надолго разрывает поток мощности от двигателя к колёсам во время переключения. Получаются дискомфортные провалы на разгоне. Единственный способ достичь комфорта при переключениях — сократить их время. А это, увы, означает рост цены всей конструкции.
А электроника вынуждена перестраховываться: чтобы избежать рывков и сохранить сцепление, «робот» надолго разрывает поток мощности от двигателя к колёсам во время переключения. Получаются дискомфортные провалы на разгоне. Единственный способ достичь комфорта при переключениях — сократить их время. А это, увы, означает рост цены всей конструкции.
Пионером массового использования преселективных коробок стал концерн Volkswagen, использующий DSG (S tronic у Audi) как на переднеприводных, так и на полноприводных моделях с продольно и поперечно установленными двигателями. Аббревиатура DSG (Direct Shift Gearbox — коробка прямого включения) стала нарицательным для коробок с двумя сцеплениями — хотя на самом деле это просто товарный знак.
Революционным решением стала появившаяся в начале 80-х трансмиссия с двумя сцеплениями DCT (dual clutch transmission). Рассмотрим её работу на примере 6-ступенчатой коробки DSG концерна Volkswagen. У коробки два вторичных вала с расположенными на них ведомыми шестернями и синхронизаторами — как у шестиступенчатой «механики» Гольфа.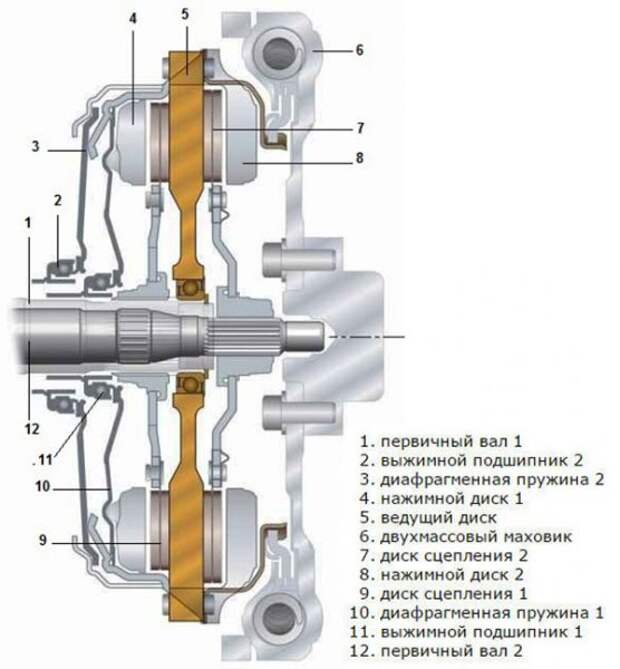 Фокус в том, что первичных валов тоже два: они вставлены друг в друга по принципу матрёшки. Каждый из валов соединяется с двигателем через отдельное многодисковое сцепление. На внешнем первичном валу закреплены шестерни второй, четвёртой и шестой передач, на внутреннем — первой, третьей, пятой и заднего хода. Допустим, автомобиль начинает разгон с места. Включается первая передача (муфта блокирует ведомую шестерню первой передачи). Замыкается первое сцепление, и крутящий момент через внутренний первичный вал передаётся на колёса. Поехали! Но одновременно с включением первой передачи умная электроника прогнозирует последующее включение второй — и блокирует её вторичную шестерню. Именно поэтому такие коробки ещё называют преселективными. Таким образом, включены две передачи сразу, но заклинивания не происходит, — ведущая шестерня второй передачи находится на внешнем валу, сцепление которого пока разомкнуто.
Фокус в том, что первичных валов тоже два: они вставлены друг в друга по принципу матрёшки. Каждый из валов соединяется с двигателем через отдельное многодисковое сцепление. На внешнем первичном валу закреплены шестерни второй, четвёртой и шестой передач, на внутреннем — первой, третьей, пятой и заднего хода. Допустим, автомобиль начинает разгон с места. Включается первая передача (муфта блокирует ведомую шестерню первой передачи). Замыкается первое сцепление, и крутящий момент через внутренний первичный вал передаётся на колёса. Поехали! Но одновременно с включением первой передачи умная электроника прогнозирует последующее включение второй — и блокирует её вторичную шестерню. Именно поэтому такие коробки ещё называют преселективными. Таким образом, включены две передачи сразу, но заклинивания не происходит, — ведущая шестерня второй передачи находится на внешнем валу, сцепление которого пока разомкнуто.
Состояние DSG при движении на первой передаче. Муфтами блокированы шестерни 1-й и 2-й передач.
Муфтами блокированы шестерни 1-й и 2-й передач.
Когда машина достаточно разгонится и компьютер решит повысить передачу, размыкается первое сцепление и одновременно замыкается второе. Крутящий момент теперь идёт через внешний первичный вал и пару второй передачи. На внутреннем валу уже выбрана третья. При замедлении те же операции происходят в обратном порядке. Переход происходит практически без разрыва потока мощности и с фантастической скоростью. Серийная коробка Гольфа переключается за восемь миллисекунд. Сравните со 150 мс на Ferrari Enzo!
Состояние DSG после переключения на 2-ю передачу. 3-я передача ожидает своей очереди.
Коробки с двойным сцеплением экономичнее и быстрее традиционных механических, а также более комфортны, чем «автоматы». Главный их недостаток — высокая цена. Вторую проблему — неспособность передавать большой крутящий момент — решили с появлением DSG фирмы Ricardo на 1000-сильном купе Bugatti Veyron. Но пока удел большинства суперкаров — «роботы». Хотя, например, коробка Ferrari 599 GTB Fiorano — не чета опелевскому Изитронику: время переключения у суперробота исчисляется десятками миллисекунд.
Хотя, например, коробка Ferrari 599 GTB Fiorano — не чета опелевскому Изитронику: время переключения у суперробота исчисляется десятками миллисекунд.
Роботизированная коробка AMG Speedshift, устанавливаемая на новейший SL 63 AMG, представляет собой модифицированный мерседесовский «автомат» 7G-Tronic. Только крутящий момент вместо тяжёлого и инертного гидротрансформатора передаёт одинарное многодисковое «мокрое» сцепление. Благодаря применению сложных электрогидравлических актуаторов время переключения составляет 0,1 с.
Сегодня коробки DCT есть не только у Фольксвагена, но и у компаний BMW, Ford, Mitsubishi и FIAT. Преселективные коробки признали даже инженеры Porsche, которые используют в своих машинах только проверенные технологии. Аналитики прогнозируют, что в будущем наиболее распространёнными трансмиссиями станут DCT и вариаторы. А дни третьей педали, похоже, сочтены — скоро она исчезнет даже из самых драйверских спорткаров. Человечество выбирает то, что удобнее.![]()
Описание принципов работы роботизированной КПП DCT Хендай
Рассмотрим DCT автомобилей Hyundai: принцип работы, характерные особенности, плюсы и минусы.
Роботизированная трансмиссия — новшество из мира спортивных автокаров
Роботизированная КП (DCT Хендай) — преселиктивная коробка передач, попавшая на любительский рынок в модифицированном виде относительно недавно из автоспорта, оснащенная прямым включением и двумя сцеплениями, на которые возложены разные функции:
- Контроль над нечетными передачами.
- Контроль над четными передачами.
Сравнительно быстрый и, что немаловажно, плавный разгон, в процессе которого скорости переключаются в доли секунды — главные особенности роботизированной трансмиссии автомобиля Hyundai. Кроме этого, сочетание комфортного управления транспортным средством, которое дает автомат, с неоспоримым экономичным режимом и динамикой от МКП — так же отличительная характеристика роботизированной КП, относящиеся к достоинствам этой трансмиссии.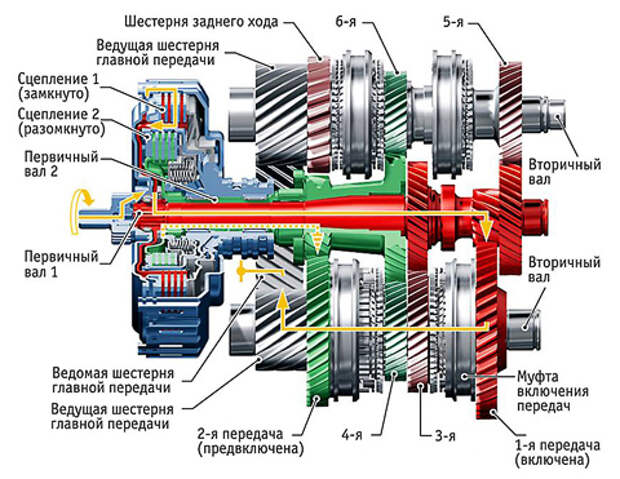
К преимуществам так же можно отнести следующее:
- дешевле автоматической КП;
- небольшая масса робота;
- некоторые модели Hyundai оснащены подрулевыми лепестками — альтернатива традиционному рычагу переключения скоростей, что позволяет быстро поставить необходимую передачу, а значит предать динамичности транспортному средству.
Корейские кроссоверы премиум класса — например, Hyundai Tucson (2016 года), при желании автолюбителя могут комплектоваться 7-ступенчатой роботизированной коробкой с двойным сцеплением и подрулевыми лепестками (несмотря на название, они расположены сразу за рулем). Данная система КПП идет исключительно с силовой установкой мощностью в 175 лошадиных сил.
Категорически противопоказаны пробуксовки, страдает плавность переключения скоростей, при даже кратковременной остановке необходимо переходить в нейтральное положение. Это очевидные недостатки роботизированной коробки. К ним же следует присовокупить дороговизну устройства, как при приобретении, так и в последующем обслуживании и ремонте.![]()
Идеальной коробки передач не существует. Поэтому, выбирая, необходимо расставлять приоритеты. То есть, что предпочтительней: динамика, стоимость, экономичность или комфорт. Определившись, проще осуществить правильный выбор относительно трансмиссии.
Принцип работы роботизированной коробки передач
Все давно привыкли к автоматизированным коробкам переключения передач на автомобилях, ведь их аналоги ставились еще на Ford T, но многих до сих пор пугает словосочетание «роботизированная коробка». Попробуем разобраться в ее устройстве.
Автор: Никита Новиков, редактор
Фото: www.
 cardoen.be
cardoen.beДля знакомства с роботизированной КПП необходимо вспомнить основы устройства обычной механической коробки передач. Главной составляющей МКПП являются 2 вала — первичный, на который и передается крутящий момент силовой установки, и вторичный, с которого преобразованный момент перераспределяется на колеса. На оба вала насажены шестерни, попарно находящиеся в зацеплении. Шестерни первичного вала закреплены на нем жестко, а на вторичном они свободно вращаются. В нейтральном положении ручки КПП все вторичные шестерни прокручиваются на валу свободно и крутящий момент на ведущую ось не поступает. При переключении передач выжатым сцеплением отсоединяется от зацепа с двигателем первичный вал, а переводом рычага КПП на вторичном валу перемещаются синхронизаторы. При подведении муфта синхронизатора жестко блокирует на валу вторичную шестерню нужной передачи. После снятия ноги с педали сцепления крутящий момент с заданным коэффициентом передается на вторичный вал, а далее и на главную передачу и колеса.
Принцип действия роботизированных коробок передач совпадает с принципом работы «механики». Только действия по смыканию/размыканию сцепления и выборому передач в данном типе коробок выполняют актуаторы. В большинстве случаев это шаговый электромотор с редуктором и исполнительным механизмом. Управляет актуаторами электронный блок.
В автоматическом режиме команда на переключение передачи поступает от бортового компьютера, учитывающего скорость движения, обороты двигателя, данные ESP, ABS и других вспомогательных систем. А в ручном — от водитель при переключении селектора КПП или лепестков, расположеных под рулем.
Основная проблема роботизированных КПП — отсутствие обратной связи по сцеплению. Человек чувствует диски смыкаются и может контролировать скорость и плавность переключения. А электроника вынуждена перестраховываться: чтобы избежать рывков и сохранить сцепление, «робот» надолго разрывает поток мощности от двигателя к колесам во время переключения.
Фото: www. motor-talk.de
motor-talk.deИнновацией в автомобилестроение стала появившаяся в начале 1980 годов трансмиссия с 2 сцеплениями DCT — dual clutch transmission. К их числу можно отнести 6-ступенчатую коробку DSG концерна Volkswagen. У немецкого варианта 2 вторичных вала с расположенными на них ведомыми шестернями и синхронизаторами — как у 6-ступенчатой МКПП, устанавливаемой на Golf. Фокус в том, что первичных валов тоже два и они вставлены додин в другой по принципу матрешки и соединены с двигателем через отдельное многодисковое сцепление. На внешнем первичном валу закреплены шестерни 2, 4 и 6 передач, на внутреннем — 1, 3, 5 и заднего хода. Электроника автоматически готовит следующую передачу и при необходимости моментально ее включает, одновременно с этим подготавливая следующую передачу на другом валу.
Смена передач происходит с минимальным по времени разрывом потока мощности и с невероятной скоростью. Серийная коробка Volkswagen Golf переключается за 8 мс, а для сравнения, на Ferrari Enzo — 150 мс!
Коробки с двойным сцеплением расходуют меньше топлива и быстрее меняют скорости по сравнению с традиционными механическими, при этом более комфортны, чем АКПП. К основным недостаткам можно отнести высокую цену. Другая проблема — неспособность передавать большой крутящий момент — решили с появлением DSG фирмы Ricardo на 1000-сильном купе Bugatti Veyron. Но пока на большинство суперкаров устанавливаются «роботы».
К основным недостаткам можно отнести высокую цену. Другая проблема — неспособность передавать большой крутящий момент — решили с появлением DSG фирмы Ricardo на 1000-сильном купе Bugatti Veyron. Но пока на большинство суперкаров устанавливаются «роботы».
Сегодня коробки DCT разработаны компаниями BMW, Ford, Mitsubishi и FIAT. Данный тип признали даже конструкторы Porsche, которые применяют в своих моделях исключительно проверенные технологии. Эксперты считают, что в скором времени самыми распространенными трансмиссиями будут «роботы» DCT и вариаторы.
РКПП — роботизированная коробка передач, «робот»
РКПП — роботизированная коробка передач (коробка «робот), которая позволяет выбирать и включать необходимую передачу без участия водителя, то есть автоматически. При этом ошибочно полагать, что роботизированная трансмиссия является одной из разновидностей АКПП (гидромеханический автомат).
Прежде всего, чтобы понять, что такое роботизированная коробка передач, для начала необходимо вспомнить устройство и принцип работы обычной механической коробки (МКПП). Так вот, фактически роботизированная коробка является той же «механикой», однако автоматическое переключение передач в данном типе КПП становится возможным благодаря наличию боков управления и электронно-механических исполнительных устройств.
Так вот, фактически роботизированная коробка является той же «механикой», однако автоматическое переключение передач в данном типе КПП становится возможным благодаря наличию боков управления и электронно-механических исполнительных устройств.
Устройство, особенности и принцип работы роботизированной коробки передач
Как уже было сказано выше, РКПП состоит из механической коробки передач, а также дополнительных устройств для выжима сцепления, выбора и переключения передачи. Данные устройства называются актуаторами (актуатор сцепления, актуатор выбора передачи). Также коробка «робот» имеет собственную систему управления, которая представляет собой ЭБУ коробкой и ряд электронных датчиков, взаимодействующих с блоком.
Получается, данный тип КПП представляет собой механическую коробку с автоматическим управлением и принципиально отличается от классического «автомата», а также бесступенчатого вариатора.
Роботизированная КПП, как и обычная МКПП, имеет сцепление, в ней не используется трансмиссионная жидкость ATF в качестве рабочей для управления и т. д. Добавим, что в современных «роботах» может быть как одно, так и два сцепления. В первом случае следует понимать однодисковый «робот», а во втором преселективную роботизированную коробку передач с двумя сцеплениями.
д. Добавим, что в современных «роботах» может быть как одно, так и два сцепления. В первом случае следует понимать однодисковый «робот», а во втором преселективную роботизированную коробку передач с двумя сцеплениями.
Если говорить об устройстве коробки — робот, можно выделить следующие базовые составные элементы:
- Коробка передач, которая по устройству напоминает «механику;
- Актуаторы (сервоприводы), отвечающие за выжим сцепления и включение передачи;
- Блок управления коробкой (микропроцессорный ЭБУ) и внешние датчики;
Давайте рассмотрим устройство РКПП на примере 6-и ступенчатой роботизированной коробки передач с двумя сцеплениями. Сама коробка похожа на МКПП, однако имеет сразу два ведущих вала. Если просто, эти валы расположены друг в друге (внешний вал имеет внутреннюю полость, куда вставлен еще один внутренний первичный вал).
На внешнем валу установлены шестерни привода 2, 4 и 6 передачи. На внутреннем валу ставятся шестерни 1, 3, 5 передачи, а также передачи заднего хода. Для каждого из валов имеется отдельное сцепление.
Для каждого из валов имеется отдельное сцепление.
Актуаторы роботизированной коробки представляют собой электрические или гидросервоприводы. Электрический актуатор -электромотор с редуктором, гидравлический является гидроцилиндром, шток которого связан с синхронизатором. Главной задачей как первого, так и второго типа устройств становится механическое перемещение синхронизаторов КПП, а также включение и выключение сцепления.
Блок управления коробкой передач является микропроцессорным ЭБУ, к которому подключены внешние датчики, которые задействованы в ЭСУД автомобиля. Другими словами, контроллер коробки передач взаимодействует с датчиками от двигателя, а также ряда других систем (например, ABS и т.д.). Часто блок управления коробкой совмещен с ЭБУ двигателем, при этом коробка работает по собственному заданному алгоритму.
Как работает роботизированная коробка передач
Что касается принципов работы РКПП, для начала движения и дальнейшего плавного переключения передач необходимо задействовать сцепление (как и в МКПП). Включение сцепления реализует актуатор, который получает сигнал от ЭБУ коробкой и начинает медленно вращать редуктор.
Включение сцепления реализует актуатор, который получает сигнал от ЭБУ коробкой и начинает медленно вращать редуктор.
В коробке с двумя сцеплениями сначала включается первое сцепление внутреннего первичного вала. Далее актуатор выбора и включения передачи подводит синхронизатор к шестерне первой передачи. В результате шестерня блокируется на валу и начинает вращаться вторичный вал.
После того, как автомобиль начал движение, водитель продолжает нажимать на педаль газа для разгона. В однодисковых роботах с одним сцеплением для включения второй передачи требуется некоторое время, в результате чего возникает характерный «провал».
Чтобы избавиться от такой задержки и сократить время переключений в конструкцию коробки добавили второе сцепление и еще один вал. В результате появилась так называемая преселективная роботизированная КПП.
Если просто, пока включена первая передача, вторая уже также готова к включению, так как одновременно задействовано второе сцепление. Получается, после сигнала от микропроцессорного блока быстро сработает включение второй передачи.
Получается, после сигнала от микропроцессорного блока быстро сработает включение второй передачи.
Подобным образом происходит переключение на последующие высшие передачи, а также понижение передач при езде. При этом время переключения минимально и занимает доли секунды, исключены перегазовки, практически отсутствует разрыв тяги и т.д. Результат — динамичная езда и максимальная топливная экономичность.
Работа в автоматическом режиме становится возможной благодаря тому, что ЭБУ коробкой постоянно анализирует сигналы с внешних датчиков. Блок учитывает нагрузку на ДВС, скорость движения ТС, положение педали газа, пробуксовку колес и т.д.
Также РКПП имеют возможность ручного переключения передач, имитируя работу гидромеханической АКПП в ручном режиме (например, Типтроник). Еще на некоторых «роботах» можно заблокировать включение повышенных передач.
Простыми словами, водитель при помощи селектора выбирает режим, при котором ЭБУ коробкой не будет инициировать включение, например, 3 передачи и выше, что помогает преодолевать сложные участки пути (снег, гололед, грязь и т.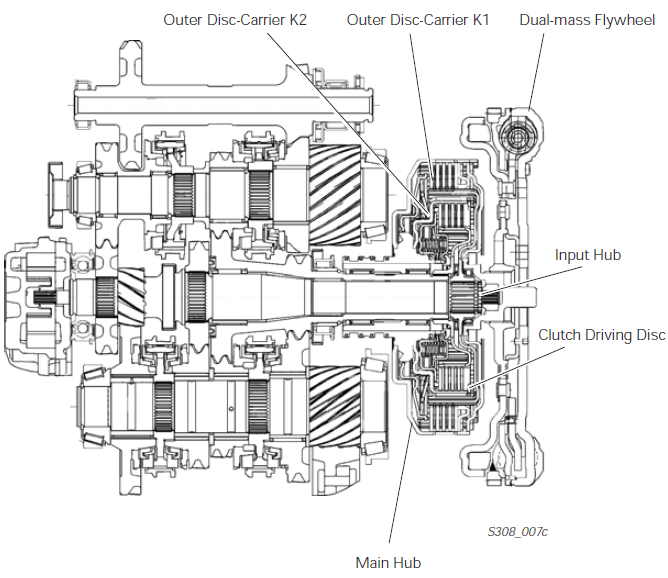 д.).
д.).
Преимущества и недостатки коробки — робот
Сегодня коробка-робот является достаточно распространенным решением. Например, концерн VAG активно устанавливает подобные коробки, которые знакомы потребителям, как DSG, на разные модели Audi, Volkswagen, Porsche, Skoda и т.д. Также роботизированную трансмиссию массово ставят на модели Ford, Mitsubishi, Honda и машины целого ряда других мировых производителей.
На первый взгляд может показаться, что РКПП имеет только плюсы: надежность и ремонтопригодность «механики», быстрота переключений, топливная экономичность, возможность выдерживать большой крутящий момент и т.д.
При этом по заверениям самих производителей РКПП должны в скором времени полностью вытеснить «классические» АКПП с гидротрансформатором и вариаторные коробки. Однако на практике этого не произошло.
Дело в том, что в плане комфорта работа «однодисковых» роботизированных коробок (с одним сцеплением) далека от АКПП и, тем более, от бесступенчатого вариатора.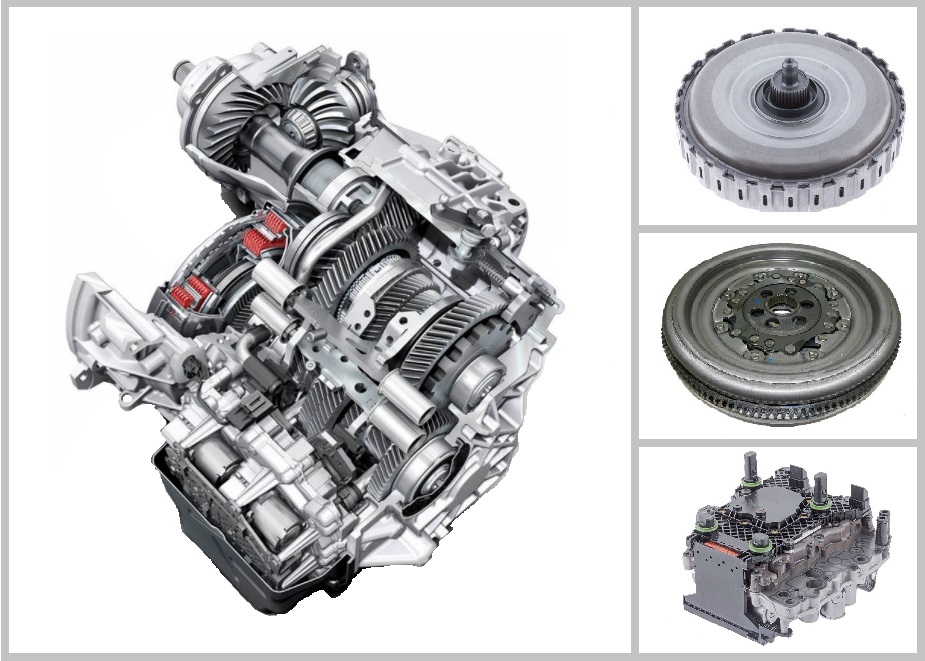 Автомобиль с такой коробкой дергается при езде, переключения «затянуты», имеются провалы и т.п.
Автомобиль с такой коробкой дергается при езде, переключения «затянуты», имеются провалы и т.п.
Также ресурс сцепления на «роботе» и актуаторов достаточно низкий (в среднем, около 80-100 тыс. км.). При этом стоимость актуаторов высокая, а ремонтопригодность данных элементов сомнительная. По этой причине многие сервисы практикуют узловую замену, то есть актуатор просто меняется на новый.
Что касается более сложных и дорогих преселективных коробок с двумя сцеплениями, переключения в этом случае более плавные и больше напоминают работу обычной АКПП. Однако ресурс такого «робота» (например, DSG 6 или DSG 7) все равно снижен, нередко возникают проблемы по части механики и электроники, а ремонт в ряде случаев потребует значительных расходов.
В качестве итога отметим, что многие автопроизводители, особенно из Японии, начали постепенно отказываться от установки коробки-робот на свои модели, заменяя ее классической АКПП с гидротрансформатором (ГДТ).
Например, Hondа Civic 8 хэтчбек, который изначально выпускался с РКПП, но в дальнейшем после рестайлинга получил полноценный «автомат». То же самое можно сказать о популярной Toyota Corolla 2007 года, которая позднее получила вместо «робота» автоматическую гидромеханическую коробку.
Как это работает: роботизированная коробка передач
Одна из ветвей развития механических трансмиссий привела инженеров и конструкторов к созданию роботизированной коробки передач – устройства, в котором передачи переключает не человек (путем включения и выключения сцепления), а «робот» — управляемый электроникой механизм. На данный момент это одна из наиболее прогрессивных типов коробок передач, устанавливаемых на автомобили, у которой, тем не менее, есть свои плюсы и минусы.
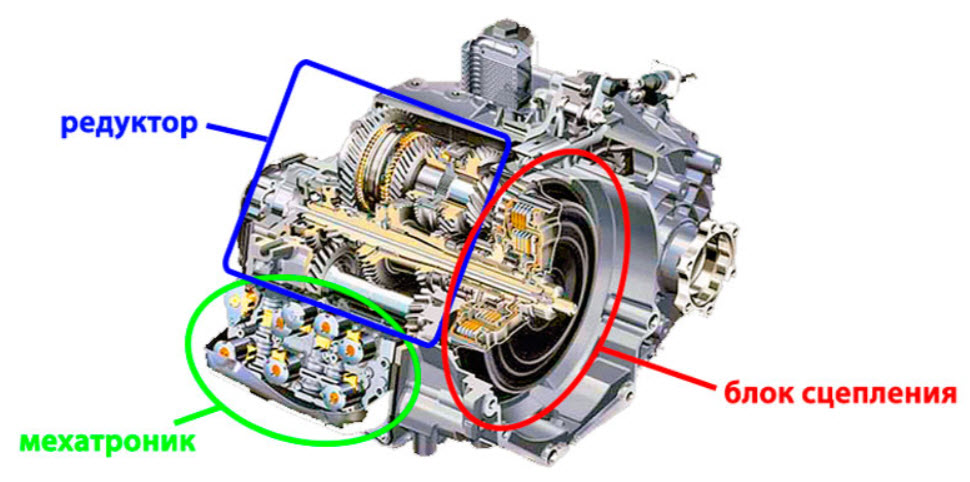
Роботизированная коробка DSGПринцип устройства роботизированной КПП
Платформой для создания роботизированной трансмиссии послужила механическая коробка передач.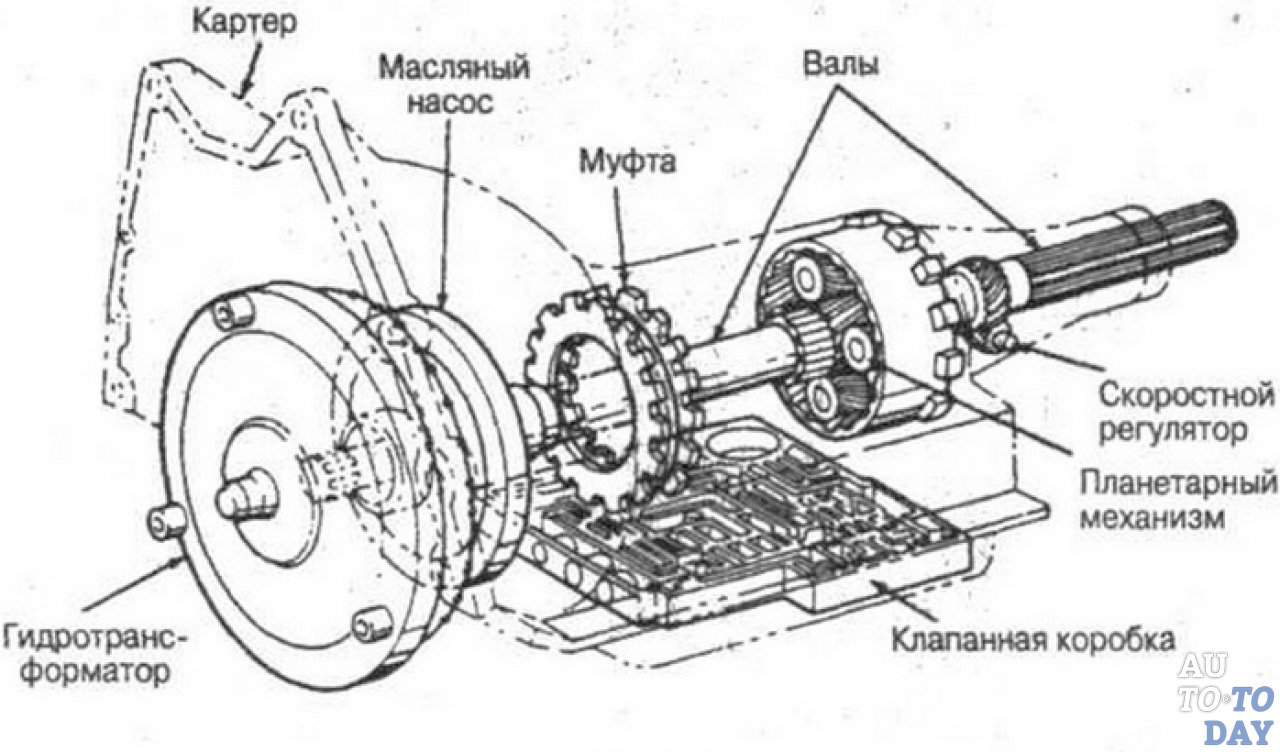 Конструкторы посчитали, что нет смысла выдумывать абсолютно новый механизм, достаточно усовершенствовать уже существующий.
Конструкторы посчитали, что нет смысла выдумывать абсолютно новый механизм, достаточно усовершенствовать уже существующий.
Как известно, принцип работы механической коробки передач заключается в передаче крутящего момента от двигателя через первичный вал на вторичный, от которого крутящий момент попадает на главную передачу, а затем – на ведущие колеса. Момент переключения передач на «механике» осуществляется при помощи механизма сцепления, которым оперирует водитель — выжимая и отпуская сцепление, он руководит переключением передач с пониженной на повышенную, либо в обратном порядке.
В механизме работы роботизированной трансмиссии этот механический момент переключения передачи инженеры решили доверить автоматике, убрав из цепи управления непосредственное участие человека. У «робота» сцеплением и переключением передач ведают специальные узлы-актуаторы, которые бывают двух типов – актуаторы сцепления и актуаторы переключения передач. Первые ответственны за размыкание/смыкание первичного вала с двигателем, вторые – за переключение передач.
Как и многие механизмы, роботизированная трансмиссия была несовершенной (о ее плюсах и минусах мы поговорим позже) и именно из-за этого автомобили с «роботами» первого поколения не пользовались у покупателей успехом. Ситуация была исправлена с выходом на рынок роботизированных трансмиссий второго поколения – с двумя сцеплениями. Их еще называют преселективными коробками передач.
Первоначально такими «роботами» оснащались автомобили концерна Volkswagen (Volkswagen, Audi, Seat, Skoda), сегодня подобными трансмиссиями оборудуются машины и других марок (BMW, Ford, Fiat). В зависимости от типа сцепления такие коробки делят на КПП с сухим и мокрым сцеплением. Принцип работы такой коробки заключается в том, что четные и нечетные ступени разнесены по разным валам (первичным и вторичным), а их включением ведает отдельный блок сцепления. Механизм такой коробки заранее подготавливает к включению следующую ступень (отсюда и название «преселективная» — предваряющая выбор передачи), благодаря чему эта процедура происходит без отключения КПП от двигателя, тем самым, не прерывается крутящий момент от мотора к ведущим колесам.
Часто возникает вопрос: в чем же различия между автоматической и роботизированной трансмиссией? Ответ прост: в устройстве. Роботизированная коробка передач – это, как было указано выше, та же «механика», только включением/выключением сцепления и переключением передач тут занимаются приводы-актуаторы. В автоматической коробке передач присутствует важный агрегат – гидротрансформатор, который заменяет собой механизм сцепления и является он связующим звеном между двигателем и собственно коробкой передач.
Роботизированная коробка передач – это, как было указано выше, та же «механика», только включением/выключением сцепления и переключением передач тут занимаются приводы-актуаторы. В автоматической коробке передач присутствует важный агрегат – гидротрансформатор, который заменяет собой механизм сцепления и является он связующим звеном между двигателем и собственно коробкой передач.
Достоинства и недостатки «роботов»
Положительными сторонами роботизированных коробок передач первого поколения было отсутствие педали сцепления и более низкая, чем у автоматической трансмиссии, цена. Отрицательным аспектом этих КПП был несовершенный механизм включения последующих передач, из-за чего автомобиль дергался, что приносило дискомфорт водителю и пассажирам. Также минусом этой коробки была сложность и относительно высокая стоимость ее обслуживания, которая была выше, чем у традиционной механической трансмиссии.
К плюсам преселективной роботизированной КПП можно отнести скорость переключения передач, экономичность (ввиду отсутствия потери мощности при переключении передач), работу в полностью автоматическом либо «ручном» режиме. К минусам – наличие рывков при езде на первой передаче, дороговизну ремонта и обслуживания. Например, такой характерный для многих «роботов» минус, как откатывание автомобиля назад при трогании в гору (все же роботизированная трансмиссия, несмотря на отсутствие привычного механизма сцепления, является той же «механикой») изрядно нервирует владельцев машин с РКПП и требует привыкания к подобной особенности.
К минусам – наличие рывков при езде на первой передаче, дороговизну ремонта и обслуживания. Например, такой характерный для многих «роботов» минус, как откатывание автомобиля назад при трогании в гору (все же роботизированная трансмиссия, несмотря на отсутствие привычного механизма сцепления, является той же «механикой») изрядно нервирует владельцев машин с РКПП и требует привыкания к подобной особенности.
Читайте еще: Поломки Робота
Преселективный «робот» S tronic от Audi.Принцип работы роботизированной коробки передач
Вместо традиционной механической коробки передач конструкторы всё чаще используют более современные и технологичные варианты. РКПП — это роботизированная коробка передач, которая выполняет аналогичные задачи, но имеет несколько иное устройство и принцип работы, чем у МКПП.
Для начала необходимо отметить, что автомобили с роботизированной коробкой оснащаются только двумя педалями. Вместо третьей педали используется целый арсенал датчиков, акуаторов и специальных сенсоров, контролируемых бортовым компьютером. Электронная система анализирует стиль вождения, нагрузку, скорость и характер дороги, на основе чего прогнозируются дальнейшие действия. Также проводится синхронизация работы отдельных деталей коробки и двигателя автомобиля, что позволяет быстро и вовремя переключать скорости.
Электронная система анализирует стиль вождения, нагрузку, скорость и характер дороги, на основе чего прогнозируются дальнейшие действия. Также проводится синхронизация работы отдельных деталей коробки и двигателя автомобиля, что позволяет быстро и вовремя переключать скорости.
Конструкция МКПП
Конструкция обычной МКПП
В основе конструкции традиционной механической коробки передач лежат два вала: ведущий и ведомый. Двигатель выполняет определённую работу и создаёт крутящий момент, который передаётся с помощью сцепления на ведущий (первичный) вал. Ведомый (вторичный) вал уже непосредственно связан с колёсной парой, благодаря чему автомобиль приходит в движение. Первичный и вторичный валы связаны с собой специальными шестернями. Коробка передач определяет, как именно они взаимодействуют между собой. В нейтральном положении шестерни на ведомом валу вращаются свободно, то есть крутящий момент не передаётся на колёса.
Когда необходимо привести автомобиль в движение, водитель зажимает сцепление и включает передачу.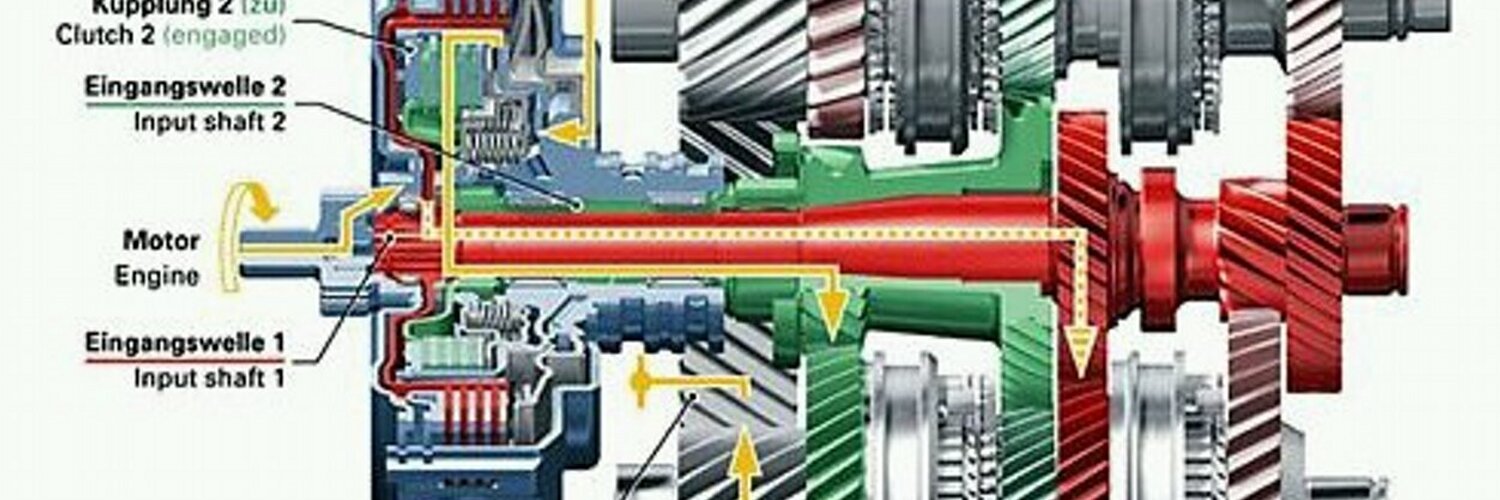
РКПП имеет очень много общего с механической коробкой, и принцип работы роботизированной коробки передач во многом схож с «механикой». Но главное отличие, как было сказано выше, заключается в том, что некоторые функции, такие как активация сцепления, коробка-робот выполняет автоматически.
История и причины появления
Европейские автомобильные компании поставили перед собой задачу улучшить характеристики автомобиля и его управляемость. Так как современные условия вождения достаточно существенно отличаются от тех, которые были во времена появления МКПП, необходимо создавать новые конструкции. В первую очередь учитываются загруженные городские дороги, где поток автомобилей движется неравномерно. Постоянные старты и остановки, и сопутствующее переключение передач сильно утомляют и снижают внимание. Именно поэтому была придумана коробка-робот, которая представляет собой нечто среднее между «механикой» и «автоматом», совмещая лучшие качества той и другой коробки. Первопроходцами в этом были спортивные автомобили, а РКПП фактически «тестировались» на гоночных трассах.
В первую очередь учитываются загруженные городские дороги, где поток автомобилей движется неравномерно. Постоянные старты и остановки, и сопутствующее переключение передач сильно утомляют и снижают внимание. Именно поэтому была придумана коробка-робот, которая представляет собой нечто среднее между «механикой» и «автоматом», совмещая лучшие качества той и другой коробки. Первопроходцами в этом были спортивные автомобили, а РКПП фактически «тестировались» на гоночных трассах.
Особенности РКПП
Схема работы РКПП
Принцип работы РКПП по сути ничем не отличается от принципа работы МКПП. Также она имеют аналогичную конструкцию, за исключением наличия в «роботе» специальных сервоприводов, которые называют акуаторами. Именно они позволяют автоматизировать многие процессы, в частности смыкание сцепления и непосредственный выбор конкретной передачи.
Акуатор представляет собой электрический мотор с исполнительным механизмом и редуктором. В некоторых моделях автомобилей применяются гидравлические акуаторы.![]() Контролирует работу данных механизмов электроника.
Контролирует работу данных механизмов электроника.
-
Поступает команда и сервопривод замыкает сцепление;
-
Перемещаются синхронизаторы, выбирая нужную скорость;
-
Сразу же в автоматическом режиме плавно размыкается сцепление;
-
Крутящий момент с нужным коэффициентом начинает передаваться на колёса.
Иными словами больше нет никакой необходимости иметь педаль в салоне, так как электроника автоматизирует основные шаги.
Важным элементом является компьютер, так как он анализирует скорость движения, данные, полученные с различных датчиков и сенсоров, и прочее, на основе чего выбирает нужную передачу.
Марки автомобилей с РКПП и названиями коробок
Плюсы и минусы РКПП
Плюсы коробки-робота:
-
Бюджетный вариант «автомата»;
-
Сохранены многие достоинства «механики»;
-
Требуют меньше усилий;
-
Высокий процент передачи КПД в крутящем моменте.
Простая конструкция не требовательна в обслуживании, но при этом отличается неплохими эксплуатационными характеристиками.
Из минусов можно отметить то, что РКПП больше подходят для автомобилей с мощными двигателями — изначально данные коробки проектировались для гоночных болидов. Из-за нехватки мощности коробка работает в более широком диапазоне и чаще переключает скорости, что снижает ресурс трансмиссии.
Видео
РКПП посвящен следующий видеоматериал:
Роботизированная коробка передач автомобиля — устройство и как работает
Роботизированная коробка передач автомобиля — разновидность полуавтоматических КПП, которая объединяет черты механической коробки и автоматической. Расскажем что такое коробка — робот, как работает и в чем преимущество перед другими типами трансмиссии.
Что это такое
Вместо третьей педали, которую нужно выжать для переключения скоростей с механической коробкой передач, в авто с роботизированной коробкой передач две педали. Роль третьей педали играет целая система сенсоров, передатчиков и исполнительных механизмов, которые при помощи бортового компьютера переключают коробку без участия водителя и сцепления. Компьютер синхронизирует работу деталей коробки, а некоторые электронные системы способны научиться распознавать стиль вождения водителя и предугадывать его действия. У роботизированной КПП ручка переключения скоростей находится там же, где и ручка механической коробки, но вместо Ж-образного переключения, ручка переключается только вперед или назад.
Роль третьей педали играет целая система сенсоров, передатчиков и исполнительных механизмов, которые при помощи бортового компьютера переключают коробку без участия водителя и сцепления. Компьютер синхронизирует работу деталей коробки, а некоторые электронные системы способны научиться распознавать стиль вождения водителя и предугадывать его действия. У роботизированной КПП ручка переключения скоростей находится там же, где и ручка механической коробки, но вместо Ж-образного переключения, ручка переключается только вперед или назад.Как работает
Работает следующим образом. При переключении ручки передач и нажатии педали газа сенсоры передают информацию в блок управления, который в свою очередь передает сигнал в коробку передач. Сенсоры коробки передач также сообщают в блок информацию о действующей скорости и новом требовании переключения скоростей.Блок управления синхронизирует информацию, полученную от сенсоров, и выбирает оптимальную скорость и время переключения скоростей и обеспечивает слаженность работы механизмов коробки передач. При этом принимается в расчет скорость вращения двигателя, работа кондиционера, показатели спидометра.
Бортовой компьютер роботизированной КПП управляет гидромеханикой, который смыкает или размыкает сцепление. Этот процесс происходит синхронно с действием водителя, переключающего ручку скоростей. Гидромеханический блок использует жидкость из тормозной системы для запуска гидравлического цилиндра, обеспечивающего движение актуатора.В чём преимущество
Электроника реагирует быстрее человека и более точно, поэтому «выжать» сцепление можно без участия водителя. Для парковки автомобиля, обратного хода или нейтрального положения трансмиссии водитель должен предварительно выжать обе педали одновременно, после этого можно выбрать один из трех вариантов.Сцепление нужно только, чтобы машина пришла в движение. Для быстрого переключения скорости на более высокую необходимо убрать ногу с педали газа, чтобы двигатель сбавил обороты для подходящей скорости. Для этого ручка передачи скоростей должна стоять на нужной позиции.
границ | Компактные редукторы для современной робототехники: обзор
Введение
Промышленные роботы составляют основу нескольких крупных традиционных производств, включая автомобилестроение и электронику. Сегодня многие регионы мира видят реальную возможность возродить обрабатывающую промышленность, внедряя роботов на малых и средних предприятиях (МСП) и в вспомогательные услуги, как правило, в здравоохранении (SPARC, 2015).
Для крупномасштабных промышленных сред с высокой степенью автоматизации преимущество роботизированных решений по сравнению с людьми-операторами в основном заключается в (i) большей доступности и (ii) способности перемещать — обычно большие — полезные грузы с исключительной точностью позиционирования и с высокой скоростью.Эти аспекты имеют решающее значение при разработке и выборе подходящих технологий для промышленного робота, особенно для первичных двигателей и трансмиссий, обеспечивающих движение этих устройств.
Применения в производстве и персональном обслуживании малых и средних предприятий бросают вызов этой традиционной парадигме робототехники. Ключ к успеху в этих новых приложениях лежит в очень высокой степени гибкости, необходимой для обеспечения безопасного и эффективного прямого сотрудничества с людьми для достижения общих целей.Эта цель требует, чтобы роботы сначала развили способность безопасно взаимодействовать с людьми в дисциплине, обычно называемой pHRI — физическое взаимодействие человека и робота.
pHRI оказывает широкое влияние на срабатывание роботов. Опыт, накопленный за последние десятилетия, в основном в области робототехники в сфере здравоохранения, показывает, что для безопасного и эффективного взаимодействия с людьми роботы должны в основном двигаться, как люди, и, следовательно, жертвовать некоторыми из своих традиционных преимуществ с точки зрения полезной нагрузки, точности и скорости.Эта ситуация привела к обширным исследованиям в последние годы, охватывающим оптимальный выбор первичных двигателей и передач для срабатывания HRI (Zinn et al., 2004; Ham et al., 2009; Iqbal et al., 2011; Veale and Xie, 2016 ; Verstraten et al., 2016; Groothuis et al., 2018; Saerens et al., 2019).
Эти работы относятся к более широкой области исследований, изучающих оптимизацию сцепления между первичным двигателем и коробкой передач для данной задачи в автоматических машинах. Краткий обзор основных разработок в этой области дает полезные сведения, позволяющие понять влияние коробки передач на общую производительность системы.Паш и Серинг (1983) определили важность инерции при срабатывании и предложили использовать передаточное число для согласования инерции двигателя и отраженной нагрузки в качестве средства минимизации потребления энергии для чисто инерционной нагрузки. Чен и Цай (1993) применили эту идею к области робототехники и определили результирующую способность к ускорению конечного эффектора как определяющий параметр. Ван де Стрете и др. (1998) разделили характеристики двигателя и нагрузки, чтобы распространить этот подход на общую нагрузку, и предоставили метод определения подходящих передаточных чисел для дискретного набора двигателей и коробок передач.Roos et al. (2006) изучали выбор оптимального привода для трансмиссии электромобилей, добавляя вклад КПД коробки передач. Giberti et al. (2010) подтверждают инерцию ротора, передаточное отношение, эффективность коробки передач и инерцию коробки передач как наиболее важные параметры для выбора срабатывания и предлагают графический метод оптимизации этого выбора для динамической задачи. Петтерссон и Олвандер (2009) снова сосредоточились на промышленных роботах и представили метод, моделирующий коробку передач с упором на массу, инерцию и трение.Резазаде и Херст (2014) используют очень точную модель двигателя и включают фундаментальный критерий выбора полосы пропускания в дополнение к минимизации энергии. Дрессчер и др. (2016) исследуют влияние трения на планетарный редуктор, в котором кулоновское трение является доминирующим механизмом трения, и демонстрируют, как КПД редуктора обычно становится преобладающим над КПД двигателя при высоких передаточных числах.
По сравнению с исходными моделями коробок передач, использовавшихся в этих работах, где коробки передач моделировались как идеальные передаточные числа, сложность моделей постепенно возрастала.Тем не менее, необходимо сделать важные — и нереалистичные — упрощения, чтобы добиться хорошей практической применимости этих методов. Таким образом, не учитываются важные эффекты, такие как жесткость на кручение и потерянное движение, в то время как модели инерции и эффективности коробки передач сильно упрощены. Это оправданный подход для множества приложений, где упрощенные методы могут помочь инженерам выбрать подходящие трансмиссии. Однако в HRI эти свойства слишком важны для пригодности коробки передач, и их нельзя так сильно упростить.
Следовательно, необходим другой подход, чтобы предоставить полезные рекомендации по выбору коробки передач в HRI, избегая чрезмерной сложности задач оптимизации в этой области. Предоставление подробных сведений об эксплуатационных свойствах и характеристиках различных технологий редукторов для обоснованного выбора — еще один вариант, следуя традициям таких работ, как Schempf and Yoerger (1993) или Rosenbauer (1995). Следуя этому подходу, Siciliano et al. (2010), Ли (2014), Шейнман и др.(2016) и Pham and Ahn (2018) предоставляют интересные обзоры высокоточных редукторов для современной робототехники. Однако технологии не анализируются достаточно подробно, чтобы получить хорошее представление о сложных механизмах, в которых они влияют на выполнение роботизированной задачи.
Основная цель этого обзора, следовательно, состоит в том, чтобы дополнить эти работы подробным анализом основных принципов, сильных сторон и ограничений доступных технологий. Помимо возможности прогнозирования будущего технологий редукторов в робототехнике, этот подход может помочь неспециалистам по редукторам определить подходящие технологии компактных редукторов для многофакторных требований новых робототехнических приложений (López-García et al., 2018). Для специалистов по коробкам передач из других областей этот анализ может помочь им получить полезную информацию о конкретных потребностях приложений HRI.
Это исследование начинается с краткого описания основных требований к будущим роботизированным трансмиссиям, чтобы затем представить структуру оценки, предназначенную для оценки пригодности и потенциала конкретной технологии коробок передач для этой области. Эта структура включает сильную перспективу pHRI и новый параметр — коэффициент скрытой мощности — для оценки эффективности, присущей определенной топологии редуктора.Эта новая структура используется в первую очередь для обзора традиционных технологий редукторов, используемых в промышленных роботах, и новых технологий передачи, которые в настоящее время находятся в процессе выхода на рынок. Наконец, в конце документа приводится краткое изложение выводов, сделанных в результате этого обзора, вместе с нашими выводами и рекомендациями.
Система оценки роботизированных трансмиссий с расширенными возможностями HRI
Контроль
Управление роботизированными устройствами — очень широкая и сложная тема, которая является предметом обширной исследовательской литературы.В этом разделе мы ограничимся введением основных принципов линейности и отраженной инерции, которые являются основными для понимания влияния редуктора на управление.
Хотя в целом скорость и точность являются противоречивыми требованиями, обычные робототехнические устройства превосходны в достижении высокой точности позиционирования на высокой скорости благодаря использованию жестких приводов с очень линейным поведением (Cetinkunt, 1991). Включение роботизированной трансмиссии влияет на сложность управления в основном двумя способами: вносит дополнительную нелинейность и сильно влияет на отраженную инерцию.
Нелинейности, вызванные включением трансмиссии, принимают в основном форму люфта и / или трения и уменьшают полосу пропускания системы, создавая важные проблемы управления (Schempf, 1990). Утверждение о зубчатых колесах приводит к люфту, трению и (нежелательному) соответствию, которые затрудняют точное управление. (Hunter et al., 1991) сегодня так же актуально, как и почти 30 лет назад. Для некоторых технологий большие кинематические ошибки передачи и, в частности, нелинейное трение также могут вызывать значительные нелинейности.
Коробки передач также сильно влияют на отраженную инерцию системы. В роботизированном устройстве инерция первичного двигателя обычно на несколько порядков меньше, чем у полезной нагрузки, что делает систему нестабильной и создает серьезные проблемы с управлением. Добавление трансмиссии сильно снижает инерцию полезной нагрузки, которую видит первичный двигатель и которая отражается на него, на коэффициент, равный квадрату передаточного отношения трансмиссии. Таким образом, тщательный выбор трансмиссии может привести к более сбалансированной инерции на обеих сторонах трансмиссии, способствуя минимизации энергопотребления и созданию более надежной, стабильной и точной системы (Pasch and Seering, 1983).
Отраженная инерция особенно важна, когда рабочие органы претерпевают быстрые и частые изменения скорости и / или крутящего момента, что очень часто встречается в задачах автоматизации и робототехники. В этих случаях вводится перспектива полосы пропускания, чтобы подтвердить способность системы отслеживать эти изменения (Sensinger, 2010; Rezazadeh and Hurst, 2014). Это лежит в основе принципа управляемости задним ходом, способности системы демонстрировать низкий механический импеданс, когда она приводится в действие с естественной выходной мощности (с обратным приводом).Это особенно важно при частом двунаправленном обмене энергией между роботом и его пользователем, что типично для реабилитационных устройств или экзоскелетов. Как демонстрируют Ван и Ким (2015), управляемость коробки передач задним ходом включает в себя комбинированный эффект отраженной инерции, отраженного демпфирования и кулоновского трения, и поэтому она тесно связана с эффективностью коробки передач.
Это подчеркивает важность для оценки управляющего воздействия определенной технологии коробки передач как возможностей передаточного числа, так и нелинейностей (люфт, трение), которые она вносит.
Безопасность
Промышленные роботы традиционно размещаются за забором в хорошо структурированной среде, где они могут воспользоваться преимуществами своих быстрых и точных роботизированных движений, не подвергая опасности целостность человека-оператора.
Безопасный pHRI, включающий способность безопасно перемещаться в неструктурированной / неизвестной среде, обязательно тесно связан с управляемостью. Текущая стратегия, используемая робототехниками для достижения этой цели, состоит из формирования механического импеданса (Calanca et al., 2015), то есть позволяя контроллеру соответствия управлять сложным динамическим соотношением между положением / скоростью робота и внешними силами (Hogan, 1984).
Принцип прост: чтобы обеспечить хорошую адаптацию к неопределенной среде, а также целостность человека-оператора / пользователя во время взаимодействия с роботизированным устройством, последний должен двигаться согласованно, как человек (Karayiannidis et al. др., 2015). Это подчеркивает важность импеданса и внутреннего соответствия (De Santis et al., 2008) и объясняет появление нового типа внутренне гибких исполнительных механизмов для pHRI (Ham et al., 2009), где требуется высокая степень соответствия (Haddadin and Croft, 2016).
С точки зрения управления, инерция полезной нагрузки, отраженная к первичному двигателю, уменьшается на коэффициент, соответствующий квадрату передаточного числа. Таким же образом обычно небольшая инерция ротора первичного двигателя усиливается тем же фактором при отражении в сторону полезной нагрузки, который должен быть добавлен к инерции, возникающей в результате движения роботизированного устройства и груза по соображениям безопасности, а также ограничение рабочих скоростей.
Хотя в большинстве актуаторов pHRI сегодня используются редукторы с высоким передаточным числом, некоторые известные робототехники Seok et al. (2014), Сенсингер и др. (2011) видят большой потенциал робототехники в использовании двигателей с высоким крутящим моментом (бегунков), требующих очень малых передаточных чисел. Новые производители робототехнических решений, такие как Genesis Robotics из Канады или Halodi Robotics AS из Норвегии, предлагают приводы для робототехники, основанные на этих принципах. По их мнению, увеличение инерции двигателя и уменьшение передаточного числа должно приводить к снижению инерции двигателя, отражаемой на рабочий орган, что обеспечивает более высокие рабочие скорости и / или полезную нагрузку без ущерба для целостности оператора.Низкие передаточные числа также имеют дополнительное преимущество в ширине полосы: они имеют меньшее трение и люфт, уменьшая вклад нелинейностей от коробки передач. С другой стороны, умеренное передаточное число не может компенсировать нелинейные условия сцепления — обычно зубчатый крутящий момент (Siciliano et al., 2010).
При более внимательном рассмотрении технических характеристик этих новых двигателей возникают некоторые вопросы с точки зрения достижимой эффективности, веса или компактности, а также последствий для оборудования, возникающих в результате чрезмерной тяги к высоким электрическим токам (HALODI Robotics, 2018; GENESIS Robotics, 2020).
Подводя итог, нет полного согласия о том, как лучше всего подойти к безопасному срабатыванию для робототехники. Тем не менее, сильные естественные связи между безопасностью и управляемостью столь же очевидны, как и решающее значение передаточного числа трансмиссии и ее нелинейностей.
Вес и компактность
Облегченная конструкция имеет первостепенное значение для обеспечения совместимости безопасности и хорошей производительности в новых приложениях робототехники (Albu-Schäffer et al., 2008). Новейшие коллаборативные роботы (коботы), такие как облегченный робот KUKA, разработанный в сотрудничестве с Институтом робототехники и мехатроники Немецкого аэрокосмического центра (DLR), живут по этому принципу и, следовательно, сильно отличаются от тяжелых и громоздких традиционных промышленных роботов.Благодаря более низкой инерции, легкие коботы обеспечивают более высокую производительность — более высокие скорости — без ущерба для безопасности пользователя.
Этот выгодный аспект облегченной конструкции имеет и другие преимущества. Для мобильных робототехнических систем меньший вес означает большую автономность. В носимых вспомогательных роботизированных устройствах, включая протезы и экзоскелеты, легкий вес также является ключевым аспектом для повышения комфорта (Toxiri et al., 2019).
Высокая компактность — еще одна характерная черта этих новых роботизированных устройств: от коботов до вспомогательных устройств, компактность дает преимущества в маневренности и удобстве взаимодействия.
В роботизированных приложениях, предполагающих тесное сотрудничество с людьми или предоставление мобильных услуг, позиции по своей сути весьма неопределенны. Легкие и компактные конструкции особенно выгодны (Loughlin et al., 2007) для этих применений с двумя последствиями: первичные двигатели и трансмиссии — обычно самые тяжелые элементы в роботизированном устройстве — должны быть легкими и компактными, но легкие конструкции имеют тенденцию требуйте более низких крутящих моментов.
В отличие от веса коробки передач, определение подходящего критерия для оценки вклада коробки передач в компактность системы является более сложной задачей.Физический объем определенно играет роль, но наш опыт показывает, что фактическая форма коробки передач имеет тенденцию иметь большее влияние. Еще один аспект, о котором стоит упомянуть, — это наличие в некоторых конфигурациях редукторов свободного пространства для размещения материала или движущихся частей, таких как электродвигатели или выходные подшипники, также могут представлять особый интерес. Поэтому мы решили включить в нашу схему оценки приблизительную форму (диаметр × длина) выбранной коробки передач, в то время как наличие дополнительного места можно напрямую оценить с помощью предоставленных цифр для каждой из конфигураций.
Эффективность и виртуальная мощность
КПД
В таких областях, как автомобильные или ветряные турбины, эффективность редукторов долгое время находилась в центре внимания. С другой стороны, в робототехнике эффективность до недавнего времени не становилась ключевым параметром при выборе подходящей коробки передач (Arigoni et al., 2010; Dresscher et al., 2016).
Более высокая эффективность — более низкие потери — позволяют снизить потребление энергии и прямо положительно влияют как на эксплуатационные расходы, так и на воздействие машины или устройства на окружающую среду.Для мобильных и носимых роботизированных устройств повышение эффективности также помогает снизить вес системы — требуются батареи меньшего размера — и в конечном итоге приводит к большей автономности и лучшему удобству использования (Kashiri et al., 2018).
В коробках передач есть еще одно дополнительное преимущество в снижении потерь: большинство механических трансмиссий, используемых в робототехнике, имеют замкнутую форму и используют какой-либо контакт зубьев для передачи крутящего момента и движения между первичным двигателем и рабочим органом. Благодаря этому кинематическое соотношение между входной ω In и выходной скоростями ω Out заблокировано числом зубцов и определяет его передаточное отношение i K .В коробке передач без потерь передаточное отношение i τ между выходным и входным крутящими моментами τ точно соответствует обратному кинематическому передаточному отношению с противоположным знаком. Но в реальной коробке передач наличие потерь изменяет это равенство, и, поскольку кинематическое передаточное число заблокировано числом зубцов, абсолютное значение передаточного числа должно уменьшаться пропорционально потерям:
ωInωOut = iK = — η iτ = -ητOutτIn; где η — КПД системы.Следовательно, высокие потери в коробке передач означают, что меньший крутящий момент доступен для рабочего органа и требуются большие передаточные числа для достижения такого же усиления крутящего момента.
Коробки передач подвержены нескольким видам потерь. Чтобы классифицировать их, мы принимаем критерии, предложенные Talbot и Kahraman (2014), и разделяем их на зависимые от нагрузки (механические) потери мощности, возникающие из-за скольжения и качения контактных поверхностей, как в контактах шестерен, так и в подшипниках, и нагрузки -независимые (спиновые) потери мощности — возникают из-за взаимодействия вращающихся компонентов с воздухом, маслом или их смесью.
Виртуальная сила
Термин виртуальная мощность, насколько известно авторам, был первоначально введен Ченом и Анхелесом (2006), но это явление, объясняющее аномально высокие потери, присутствующие в некоторых планетных топологиях, долгое время было известно под разными названиями, включая Blindleistung (Wolf, 1958; Mueller, 1998) и скрытая или бесполезная мощность (Macmillan and Davies, 1965; Yu and Beachley, 1985; Pennestri and Freudenstein, 1993; Del Castillo, 2002).
Из-за своего принципа действия коробка передач всегда включает сторону с высокой скоростью и низким крутящим моментом и сторону с высоким крутящим моментом и низкой скоростью. Следовательно, его внутренние зубчатые зацепления обычно подвержены либо высокому крутящему моменту и низкой скорости, либо условиям высокой скорости и низкого крутящего момента. Однако в некоторых коробках передач из-за их специфической топологии некоторые зацепления шестерен могут одновременно взаимодействовать с высокой скоростью и высоким крутящим моментом. Зубчатые зацепления могут легко достичь КПД выше 98%, но поскольку генерируемые потери приблизительно пропорциональны произведению относительной скорости двух зубчатых элементов и крутящего момента, передаваемого через зацепление (Niemann et al., 1975), на этих высоконагруженных сетках появляются неожиданно большие потери. Виртуальная мощность обеспечивает основу для оценки вклада этого явления, которое в дальнейшем мы будем называть топологической эффективностью коробки передач.
Некоторые из вышеупомянутых авторов предлагают методы для оценки топологической эффективности данной конфигурации и определения ее влияния на общую эффективность системы. В рамках Chen and Angeles (2006) виртуальная мощность определяется как мощность, измеренная в движущейся — неинерциальной — системе отсчета.Скрытая мощность , представленная Ю и Бичли (1985), соответствует виртуальной мощности, когда опорная рамка является несущим элементом коробки передач, а виртуальная передаточная мощность — это соотношение между виртуальной мощностью и мощностью, генерируемой внешним крутящим моментом. применяется по ссылке. Используя эти элементы, мы определяем Latent Power Ratio топологии коробки передач как отношение суммы скрытых мощностей во всех зацеплениях к мощности, потребляемой коробкой передач.Таким образом, большой коэффициент скрытой мощности соответствует низкой топологической эффективности и указывает на сильную тенденцию к возникновению больших потерь за счет зацепления.
Чтобы облегчить понимание практического влияния на общую эффективность топологической эффективности, характеризующейся скрытым коэффициентом мощности, данной конфигурации редуктора, мы используем на этом этапе уравнения, предложенные Макмилланом и Дэвисом (1965) для расчета упрощенный пример.
Полная коробка передач робототехники обычно включает в себя несколько зацепляющих контактов, каждый из которых имеет разные рабочие условия и параметры, что приводит к различной эффективности зацепления.Эти КПД очень высоки в оптимизированных зубчатых зацеплениях — часто выше 99% — и позволяют нам упростить наши расчеты, учитывая общую уникальную эффективность зацепления η м = 99% во всех зацепляющих контактах в нашем редукторе.
Во-первых, эталонный редуктор, идеальный с точки зрения топологической эффективности, имел бы только одно зацепление и коэффициент скрытой мощности L = 1. Таким образом, потери мощности внутри этого эталонного редуктора можно легко рассчитать как функцию входной мощности. как:
Таким образом, общая эффективность зацепления всего редуктора соответствует эффективности одиночного зацепляющего контакта:
ηsys, идеально = PIN-PLossPIN = ηm = 99%;Неидеальный редуктор с таким же типовым η m во всех его зацеплениях и со скрытым коэффициентом мощности L, характеризующим его топологический КПД, указывает на то, что общие потери в редукторе можно приблизительно оценить следующим образом:
Ploss, L≈ PIN * L * (1-ηm)И общая эффективность зацепления всей коробки передач теперь составляет:
ηsys, L = PIN-PLoss, LPIN≈L * ηm + (1-L)Что для η м = 99% и для значения L = 50 дает:
Этот результат следует частично релятивизировать, поскольку накопленные потери в первых зацеплениях, задействованных вдоль различных внутренних потоков мощности в коробке передач, делают меньшую виртуальную мощность, предсказываемую этими уравнениями, которая будет протекать через последующие зацепления.Эффект от этого состоит в том, что КПД обычно будет падать немного медленнее с коэффициентом скрытой мощности, а более реалистичное значение для предыдущего расчета обычно будет между 55 и 60%.
Чтобы частично компенсировать это большое влияние топологической эффективности на общую эффективность, конфигурации с большим скрытым коэффициентом мощности требуют чрезвычайно высокой эффективности зацепления: для достижения эффективности системы> 70% системе с L = 100 требуется средняя эффективность зацепления. выше 99.5%.
Поэтому в нашем дальнейшем анализе мы сосредоточимся только на оценке вклада топологической эффективности в эффективность коробки передач. Это позволяет нам использовать упрощенный метод для расчета коэффициента скрытой мощности, который, в первую очередь, не учитывает влияние на потери, вызванные уменьшением крутящего момента. Соответствующие расчеты, использованные для определения коэффициента скрытой мощности различных конфигураций редукторов, проанализированных в этой работе, включены в Приложение I.
Подводя итог, чтобы охарактеризовать важный эффект КПД коробки передач, мы оценим порядок величины трех параметров: (i) потери, зависящие от нагрузки, (ii) пусковой момент без нагрузки и (iii) коэффициент скрытой мощности.Хотя на него дополнительно влияет статическое трение, а не только кулоновское и вязкое трение, мы выбрали пусковой крутящий момент без нагрузки (относительно номинального крутящего момента) в качестве практического способа характеристики потерь, не зависящих от нагрузки. Наши обмены с производителями редукторов показывают, что это обычная практика, она не зависит от входной мощности и легко доступна в технических данных производителя.
Производительность
По сравнению со специальными машинами и машинами для автоматической сборки промышленные роботы не могут достичь тех же стандартов точности и скорости.Оба аспекта пришлось скомпрометировать, чтобы обеспечить большую степень гибкости и мобильности, а также рабочего пространства (Rosenbauer, 1995). С этой точки зрения HRI — это всего лишь еще один шаг в том же направлении: чтобы соответствовать дальнейшим потребностям гибкости и мобильности в неструктурированной среде, необходимы дополнительные компромиссы с точки зрения точности и скорости. Этот переход отражен на Рисунке 1.
Рисунок 1 . Графическое описание перехода основных задач задач от машин через промышленных роботов и коботов к людям-операторам.
Точность и повторяемость
Множество аспектов редуктора влияют на общую точность полного роботизированного устройства. Эти аспекты долгое время находились в центре внимания традиционной робототехники и сегодня хорошо изучены, так как работы, подобные работам Майра (1989), Шемпфа и Йоргера (1993) или Розенбауэра (1995), содержат очень хорошие ссылки для понимания этих сложных влияний. Эти исследования выявили особенно важную роль, которую играет потеря хода и жесткость на кручение.
Lost Motion — это дальнейшее развитие принципа люфта, который описывает полное вращательное смещение, создаваемое приложением ± 3% от номинального входного крутящего момента.
Жесткость на кручение характеризует податливость на кручение всех элементов коробки передач, задействованных во всем потоке сил, под действием внешнего крутящего момента. Это достигается путем блокировки входа редуктора и постепенного увеличения крутящего момента, прилагаемого на выходе, при этом регистрируются изменения жесткости на кручение, приводящие к отклонениям от идеально линейного поведения.
По своей природе точные — малые потери хода и линейная высокая жесткость на кручение — редукторы упрощают задачу управления и обеспечивают высокую точность, идеально подходят для управления положением, в то время как менее точные редукторы создают более серьезные проблемы для управления положением и могут использоваться для более гибкого срабатывания. . В технологиях редукторов, где скорость оказывает сильное влияние на потери или с особенно нелинейным трением, также необходимо учитывать вклад этих элементов в точность.
Чтобы охарактеризовать возможности точности, наша конструкция включает потерю движения и жесткость на кручение, а также субъективную оценку изменения эффективности, вызванного изменениями скорости / крутящего момента.
Скорость и полезная нагрузка
Промышленные роботы могут обрабатывать большие полезные нагрузки за счет большой инерции. Для коботов, с другой стороны, соображения безопасности подразумевают, что они не должны обрабатывать такие большие полезные нагрузки, но благодаря более легкой конструкции они действительно могут достичь большего отношения полезной нагрузки к массе.
Соображения безопасности также ограничивают степень, в которой это снижение массы может быть использовано для увеличения рабочих скоростей (Haddadin et al., 2009). Тем не менее, более низкий крутящий момент способствует использованию более легких и быстрых электродвигателей, что в принципе требует более высоких передаточных чисел для этих приложений.
Критерий для характеристики вклада коробки передач в скорость и характеристики полезной нагрузки должен отражать эти аспекты и мотивировать нас использовать в нашей структуре (i) максимальную входную скорость, (ii) максимальный воспроизводимый выходной крутящий момент — так называемый момент ускорения — и номинальный крутящий момент, (iii) ) передаточное число и (iv) отношение крутящего момента к массе как для номинального, так и для момента ускорения.
Сводка
Определение характеристик роботизированных коробок передач — сложная задача: высокая универсальность этих устройств и их сложное взаимодействие с первичными двигателями и системами управления делают прямое сравнение их характеристик особенно сложным.
Передаточное число продемонстрировало сильное влияние на производительность робототехнической системы. Это объясняет его предпочтительную роль в литературе, посвященной оптимизации срабатывания роботов, и растущий интерес робототехников к возможностям использования переменных передач (Kim et al., 2002; Карбон и др., 2004; Страмиджоли и др., 2008; Жирар и Асада, 2017). Хотя мы убеждены, что трансмиссии с регулируемой передачей являются очень многообещающими и определенно будут способствовать формированию будущего ландшафта робототехники, мы ограничили наш анализ здесь компактными коробками передач с постоянным передаточным числом. На данный момент мы считаем, что нам лучше всего подойдет этот ограниченный объем, который может также способствовать выявлению потенциальных областей применения и подходящих технологий для трансмиссий с переменным передаточным числом.
На основе этого анализа мы предлагаем схему оценки будущих роботизированных коробок передач на основе следующих параметров:
• Передаточное число
• Ускорение и номинальный выходной крутящий момент
• Вес
• Форма: диаметр × длина
• Ускорение и номинальный крутящий момент к массе
• КПД: пиковое значение и субъективная зависимость от скорости и крутящего момента
• Топологическая эффективность: коэффициент скрытой мощности
• Пусковой крутящий момент при прямом и обратном движении холостого хода в% от номинального входного крутящего момента
• Потери, не зависящие от нагрузки
• Потерянное движение
• Максимальная входная скорость
• Жесткость на кручение
Наша структура включает также эталонный вариант использования, характерный для множества задач pHRI согласно нашему собственному опыту: моменты ускорения более 100 Нм и передаточные числа более 1: 100, для которых необходимо оптимизировать вес, компактность и эффективность.
Обзор технологий передачи данных, используемых в настоящее время в промышленных роботах
Электродвигатели, оснащенные механическими трансмиссиями, обычно используются в качестве исполнительных механизмов в робототехнике (Rosenbauer, 1995; Scheinman et al., 2016), а также в промышленных роботах. Эти механические трансмиссии почти неизбежно основаны на какой-то зубчатой передаче (Sensinger, 2013).
Благодаря их большей способности снижать общий вес и поскольку электродвигатели имеют тенденцию иметь более высокий КПД на высоких рабочих скоростях, другой характеристикой промышленных роботизированных трансмиссий является использование относительно больших коэффициентов передачи (передаточных чисел), обычно более 1:40 (Розенбауэр, 1995).
Планетарные редукторы: чрезвычайно универсальная платформа
Планетарные зубчатые передачи(PGT) — это компактные, универсальные устройства, широко используемые в силовых передачах. Благодаря характерной коаксиальной конфигурации и хорошей удельной мощности они особенно подходят для вращающихся первичных двигателей, таких как электродвигатели.
PGTмогут использовать две дифференцированные стратегии для достижения высоких коэффициентов усиления: (i) добавление нескольких ступеней обычных высокоэффективных PGT — здесь называемых редукторами и представленных на рисунке 2 — или (ii) использование особенно компактных конфигураций PGT с возможностью получения высоких передаточные числа.
Рисунок 2 . Внутреннее расположение редуктора Neugart с указанием его основных элементов, адаптировано из Neugart (2020) с разрешения © Neugart GmbH. Он также включает схему базовой топологии.
Хотя использование нескольких ступеней редукторов позволяет наилучшим образом использовать эффективность зацепления высоких шестерен и приводит к высокоэффективным редукторам, это обычно приводит к тяжелым и громоздким решениям. Компактные конфигурации PGT с другой стороны могут достигать высоких передаточных чисел в очень компактных формах, но они страдают от удивительно высоких потерь, связанных с высокими виртуальными мощностями (Crispel et al., 2018).
Особенно компактная конфигурация PGT для высоких передаточных чисел была впервые изобретена Вольфромом (1912) и использовалась в редукторах серии RE компании ZF Friedrichshafen AG (ZF), предназначенных для промышленных роботов (Looman, 1996). Эта конфигурация, показанная на Рисунке 3, сильно зависит от Virtual Power, и ZF представляет собой единственное известное коммерческое применение конфигураций PGT, отличное от обычных редукторов. Хотя производство серии RE было прекращено в 90-х годах, Wolfrom PGT в последнее время пользуются растущим интересом сообщества исследователей робототехники, как мы резюмировали в предыдущей статье авторов (López-García et al., 2019а).
Рисунок 3 . Внутреннее устройство ZF’s RG Series Wolfrom PGT для роботизированных приложений адаптировано из Looman (1996) с разрешения © 1998 Springer-Verlag Berlin Heidelberg. Он также включает схему базовой топологии.
Таблица 1 представляет оценку PGT. Несмотря на завышенные размеры для нашего теста, мы использовали ZF RG350 Wolfrom PGT, чтобы попытаться оценить потенциал конфигураций PGT с высоким коэффициентом, основываясь на имеющихся доказательствах его пригодности для достижения высоких коэффициентов (Арнаудов и Караиванов, 2005; Mulzer, 2010 ; Капелевич и AKGears LLC, 2013).Для редукторов мы выбрали — при поддержке производителей — подходящие решения из портфолио Wittenstein и Neugart. Стоит отметить важную роль, которую играет максимальное передаточное число на ступень в редукторе: в то время как Виттенштейн ближе к максимуму осуществимости, определяемому избеганием контакта между соседними планетами, Нейгарт выбирает в своей серии PLE (серия PLFE может достигать 1: 100 соотношений только в два этапа) более ограничительный подход и, следовательно, для достижения общего усиления 1: 100 требуется три этапа вместо двух для Виттенштейна.Это приводит к менее компактным решениям и более низкой эффективности для приложения 1: 100, но позволяет Neugart достичь более высокого прироста — до 1: 512 — без фундаментальных изменений в весе, размере или эффективности.
Таблица 1 . Схема оценки решений с планетарной зубчатой передачей.
Редукторыимеют вес около 4 кг, что нельзя напрямую сравнивать с увеличенными размерами RG350. RG350 имеет форму с большим диаметром и меньшей длиной, чем редукторы.Что касается отношения крутящего момента к весу, значения обоих решений кажутся относительно близкими.
Редукторыимеют сильное преимущество в их хорошем КПД (выше 90%), который также менее чувствителен к изменениям рабочих условий, а пусковые моменты холостого хода очень низкие. Конфигурации с высоким коэффициентом полезного действия показывают, насколько сильно ограничивается топологическая эффективность, что приводит к снижению эффективности. Это, вероятно, объясняет, почему редукторы сегодня являются доминирующей технологией PGT в робототехнике.
PGTпоказывают самые высокие входные скорости (до 8 500 об / мин), но их потери хода также самые большие (4–6 Arcmin) в обычных редукторах. В робототехнике PGT широко использовались в первых промышленных роботах, тогда как в последние десятилетия их использование сильно сократилось, в основном из-за их ограничений, связанных с уменьшением люфта. Несмотря на то, что существуют механизмы, ограничивающие по своей природе более значительную обратную реакцию PGT, на практике они основаны на введении определенной предварительной нагрузки, что отрицательно сказывается на их эффективности (Schempf, 1990).
Гармонические приводы: без люфта, легкий редуктор деформационной волны
Редуктор Strain Wave был изобретен Массером (1955) и нашел широкое применение в 70-х годах, первоначально в аэрокосмической отрасли. Его основное космическое применение было в качестве механического передающего элемента в аппарате лунохода Аполлона 15 в 1971 году (Schafer et al., 2005).
Его название происходит от характерной деформации Flexspline , нежесткой, тонкой цилиндрической чашки с зубьями, которая служит выходом.Flexspline входит в зацепление с неподвижным сплошным круглым кольцом с внутренними зубьями шестерни Circular Spline , в то время как он деформируется вращающейся эллиптической заглушкой — волновым генератором , как это видно на рисунке 4. Этот тип редуктора является наиболее распространенным. обычно называемый Harmonic Drive © (HD), из-за очень эффективной стратегии защиты IP.
Рисунок 4 . Внутренняя конфигурация коробки передач Harmonic Drive CSG (слева), адаптированная из Harmonic Drive (2014) с разрешения © 2019 Harmonic Drive SE, и коробка передач E-Cyclo (справа), адаптированная из SUMITOMO (2020) с разрешения © Sumitomo Drive, 2020 Germany GmbH.Также включена схема лежащей в основе топологии KHV, используемой для расчета его скрытого коэффициента мощности в Приложении I.
Для нашего сравнительного анализа мы выбрали два подходящих редуктора Harmonic Drive, CSD-25-2A, предназначенный для интеграции в роботизированное соединение, чтобы обеспечить адекватные структурные граничные условия, и сверхлегкий редуктор CSG-25-LW, представляющий конструктивно достаточное решение. что может быть более прямо по сравнению с другими технологиями. Совсем недавно SUMITOMO представила новый редуктор E-CYCLO, работающий также на принципе действия деформационной волны.SUMITOMO предоставила нам доступ к своему самому последнему каталогу (SUMITOMO, 2020), что позволило нам включить его в наш тест (Таблица 2). Еще одна интересная волна деформации, очень похожая на гармонический привод, недавно была также представлена GAM в своей серии коробок передач для робототехники, которая включает также планетарные зубчатые передачи и циклоидные приводы (GAM, 2020).
Таблица 2 . Схема оценки решений волн деформации.
Выбранная модель CSG имеет значительно больший крутящий момент, чем предполагалось в нашем тесте.Форма имеет больший диаметр, чем длина, а вес значительно ниже, чем у других технологий, и приводит к лучшему соотношению крутящего момента к массе из проанализированных технологий. Действительно, характерное зацепление с несколькими зубьями обеспечивает большее сопротивление крутящему моменту, чем в PGT, что делает эту технологию очень подходящей для соединений, расположенных ближе к рабочему органу, где они часто встречаются в современных промышленных роботах.
Пиковый КПД ниже, чем у редукторов, и ближе к RG350, а КПД особенно чувствителен к условиям эксплуатации.Поезда Strain Wave демонстрируют большие потери, не зависящие от нагрузки, и пусковые моменты без нагрузки, особенно в условиях обратного движения, которые становятся особенно критическими для высоких скоростей и / или низких крутящих моментов (Harmonic Drive, 2014). Для роботизированных устройств HRI, подверженных частым изменениям скорости и полезной нагрузки в сочетании с обменом энергией между роботизированным устройством и пользователем, это означает, что средняя эффективность быстро падает ниже 40–50% (López-García et al., 2019b). Также стоит отметить их большой коэффициент скрытой мощности, указывающий на одновременное присутствие высоких крутящих моментов и скоростей в зацеплении зубьев, что также помогает объяснить относительно низкий КПД.
Еще раз, благодаря зацеплению с несколькими зубьями, можно достичь потерянных движений ниже 1 угловой минуты, что дает этому редуктору большое преимущество, которое помогает гармоническим приводам находить широкое применение в промышленных роботах. Они смогли вытеснить PGT из многих приложений, особенно после значительного улучшения характеристик, вызванного новой геометрией зубьев, представленной этой компанией в 90-х годах, что также улучшило линейность их жесткости (Slatter, 2000).
Максимальная входная скорость раньше была сильным ограничением для использования редукторов HD (Schempf, 1990), но новые достижения и улучшения конструкции позволяют им теперь достигать 7500 об / мин.
Циклоидные приводы: для высокой прочности и жесткости на кручение
С момента своего изобретения Лоренцем Брареном в 1927 году (Li, 2014) циклоидные приводы нашли применение в основном в лодках, подъемных кранах и некотором крупном оборудовании, таком как прокатные станы или станки с ЧПУ. В циклоидных приводах эксцентричное входное движение создает шаткое циклоидальное движение одиночного большого планетарного колеса, которое затем преобразуется обратно во вращение выходного вала и приводит к высокой редукционной способности (Gorla et al., 2008), см. Рисунок 5.
Рисунок 5 . Внутренняя конфигурация циклоидных приводов SUMITOMO Fine Cyclo F2C-A15 и Fine Cyclo F2C-T155, идентифицирующая их основные элементы, адаптирована из SUMITOMO (2017) с разрешения © Sumitomo Cyclo Drive Germany GmbH, 2017. Он также включает схему лежащих в основе топологий.
Таблица 3 включает лидера рынка (NABTESCO RV) в этом сегменте и основных претендентов (SPINEA и SUMITOMO). RV от NABTESCO и серия Fine-Cyclo T от SUMITOMO включают в себя обычную ступень PGT с предварительным зацеплением.Полезная нагрузка этих устройств больше, чем требуется для нашего теста, и приводит к большому весу. Это уже дает ценную информацию: более компактные решения недоступны на рынке и, согласно информации, предоставленной некоторыми производителями, менее интересны, поскольку для них потребуется высочайшая точность производства и, в конечном итоге, приведет к высоким затратам.
Таблица 3 . Схема оценки решений для циклоидных приводов.
Формы аналогичны коробкам передач с волновой деформацией, а по массе больше и ближе к весам PGT по вышеупомянутым причинам.Отношение крутящего момента к массе больше, чем у PGT, но немного ниже, чем у редукторов с волновой деформацией. Основное преимущество циклоидных приводов заключается как раз в их способности выдерживать большие нагрузки и особенно ударные нагрузки, а также в минимальных требованиях к техническому обслуживанию.
Пиковый КПД выше, чем у редукторов с волновой деформацией, и ближе к КПД PGT, но КПД сильно зависит от условий эксплуатации (Mihailidis et al., 2014), а пусковые моменты холостого хода и скрытая мощность высоки, как аналогично редукторам с волновой деформацией.
Хотя они, как правило, имеют некоторый люфт, который часто компенсируется в их конструкции для достижения уровней, сопоставимых с уровнями редукторов с волновой деформацией, вероятно, за счет немного более высокого трения. Их жесткость на кручение — самая большая из проанализированных технологий редукторов.
ПриводыCycloid имеют неотъемлемое ограничение на работу с высокими входными скоростями, вызванное наличием большого и относительно тяжелого планетарного (кулачкового) колеса, что приводит к большим инерциям и дисбалансу.Это мотивирует использование, как правило, двух планетарных колес, расположенных последовательно и смещенных на 180 градусов друг к другу, для устранения дисбаланса, уменьшения вибраций и увеличения входной скорости. Это объясняет, как благодаря объединению циклоидных приводов со ступенями предварительного зацепления, состоящими из обычных ступеней PGT, циклоидные приводы получили широкое распространение в робототехнике. Такое расположение повышает эффективность, снижает чувствительность к высоким входным скоростям и обеспечивает легкую настройку их передаточных чисел.В 90-х годах гармонические приводы доминировали на рынке роботизированных коробок передач, но усовершенствования циклоидной технологии позволили циклоидным приводам начать покорять бездорожье, сначала в Японии, а затем в других местах (Rosenbauer, 1995). В настоящее время такие производители, как NABTESCO, SUMITOMO или NIDEC, предлагают циклоидные гибриды с интегрированным передаточным механизмом PGT, покрывающие более 60% рынка роботизированных коробок передач, и поэтому стали новой доминирующей технологией, особенно для проксимальных суставов, подверженных более высоким нагрузкам и меньшим ограничениям по весу (WinterGreen Исследования, 2018).
Наконец, стоит упомянуть наличие относительно большой пульсации крутящего момента, которая вносит нелинейности и усложняет их контроль. Эта пульсация крутящего момента связана с необходимостью использования циклоидных профилей зубьев, чтобы избежать столкновения зубьев между большим планетарным колесом (-ами) и зубчатым венцом, что делает эти устройства чрезвычайно чувствительными к изменениям межцентрового расстояния, вызываемым даже небольшими производственными ошибками. Существует несколько попыток улучшить эту ситуацию, используя эвольвентные зубья, менее чувствительные к изменениям межцентрового расстояния, с уменьшенными углами давления и / или коэффициентами контакта для минимизации радиальных сил и повышения эффективности (Морозуми, 1970), а также с использованием других форм нестандартных зубьев. -инволютные зубы (Коряков-Савойский и др., 1996; Хлебаня и Куловец, 2015).
Обзор новейших технологий передачи для робототехники
Усилитель крутящего момента REFLEX
Genesis Robotics привлекла большое внимание в сообществе робототехники с появлением их двигателя с прямым приводом, LiveDrive © . Согласно Genesis, LiveDrive в двух доступных топологиях — радиальном и осевом потоках — обеспечивает сравнительные характеристики в соотношении крутящего момента к массе. Двигатель с осевым магнитным потоком может достигать 15 Нм / кг, в то время как радиальный поток ограничивается максимум 10 Нм / кг.
Чтобы расширить спектр применения, Genesis Robotics представила совместимую коробку передач под названием Reflex , показанную на рисунке 6. Эта литая под давлением сверхлегкая пластиковая коробка передач предназначена для легких роботов, и хотя изначально она была разработана для совместной работы с LiveDrive. и поэтому он нацелен на передаточные числа ниже 1:30, он также способен обеспечивать передаточные числа до 1: 400 (GENESIS, 2018).
Рисунок 6 . Внутренняя конфигурация и основные элементы редуктора Reflex адаптированы из GENESIS Robotics (2020) с разрешения © 2019 Genesis Robotics.Он также включает схему базовой топологии.
В основе топологии лежит топология Wolfrom PGT с несколькими меньшими планетами (Klassen, 2019), в которой реактивное (стационарное) зубчатое колесо разделено на две части для балансировки в соответствии с конструкцией, первоначально предложенной Россманом (1934) и используемой в качестве хорошо в передаче Hi-Red Tomcyk (2000).
В редукторе Reflex выходное кольцо также разделено для облегчения сборки с косозубыми зубьями. Еще одним интересным аспектом этой конструкции является заклеенная лентой форма планет, которая, как подозревают авторы, связана с возможностью предварительной нагрузки системы для достижения нулевого люфта, который, как утверждает Genesis, возможен с этой коробкой передач.По заявлению компании, гибкость пластиковых планетарных колес также дает преимущество в уменьшении люфта.
К сожалению, пока нет независимых тестов для подтверждения заданных характеристик, и никаких официальных данных, в частности по эффективности, от Genesis пока нет, поэтому в Таблицу 4 включено только значение Latent Power Ratio, вытекающее из его топологии.
Таблица 4 . Схема оценки новых технологий редукторов.
Таким образом, хотя лежащая в основе топология Wolfrom указывает на то, что эффективность, безусловно, будет сложной задачей, эта инновационная коробка передач демонстрирует большой потенциал для переосмысления существующих технологий и их адаптации к будущим потребностям робототехники. Genesis Robotics недавно вступила в интересное партнерство с известными промышленными компаниями, такими как Koch Industries Inc. и Demaurex AG.
Проезд Архимеда
IMSystems из Нидерландов является дочерним предприятием Делфтского технологического университета, созданным в 2016 году для использования изобретения Archimedes Drive (Schorsch, 2014).
Привод Архимеда снова повторяет топологию редуктора Wolfrom (также с разрезным реактивным зубчатым венцом в некоторых его конструкциях), но включает в себя революционное новшество в использовании роликов вместо зубчатых колес для замены зубчатых контактов контактами качения, см. Рисунок 7. Контролируемая деформация планетарных роликов позволяет передавать крутящий момент между планетами аналогично колесам транспортного средства.
Рисунок 7 . Внутренняя конфигурация привода Архимеда с деталями, показывающими его планеты Flexroller, адаптирована из IMSystems (2019) с разрешения © 2019 Innovative Mechatronic Systems B.V. со схемой лежащей в основе топологии.
Характеристики, представленные в таблице 4, взятой из брошюры компании (IMSystems, 2019) и доступной по запросу, показывают, что использование топологии Wolfrom дает этому устройству возможность достигать очень высоких передаточных чисел в компактной форме, но это также приводит к низкой топологической эффективности. Согласно IMSystems, замена контакта зубьев шестерни на контакт качения способствует минимизации контактных потерь, которые, в частности, при передаче крутящего момента между планетарной передачей и кольцевыми роликами должны компенсировать высокое латентное соотношение мощности и приводить к максимальному КПД. около 80% (IMSystems, 2019).Никаких данных о пусковых моментах или потерях, не зависящих от нагрузки, не приводится.
Чтобы обеспечить передачу высокого крутящего момента без проскальзывания, необходимо строго контролировать деформацию роликов планетарного механизма, а также производственные допуски коробки передач. Это представляет собой одну из основных технологических проблем, и это ядро инноваций, вносимых этой технологией (Schorsch, 2014).
NuGear
STAM s.r.l. — частная инженерная компания из Генуи, которая помогла разработать роботизированный сустав для гуманоидного робота I-Cub.Их NuGear — это нутационная коробка передач, которая изначально была задумана (Барбагелата и Корсини, 2000) для космических приложений, но могла бы развить свой потенциал для робототехники также за счет исследования альтернативных производственных средств.
Пока нет общедоступной информации о рабочих характеристиках этой коробки передач, что означает, что мы можем предоставить здесь только предварительный анализ ее топологии и результирующих характеристик, которых можно ожидать на основе ограниченной информации, доступной в основном из проекта Caxman EU ( CAxMan, 2020), для которого NuGear был примером использования, и из доступных патентов (Barbagelata et al., 2016).
На рисунке 8 внутренняя структура NuGear представлена с использованием эквивалентной конфигурации PGT — для облегчения понимания абстрагируется аспект нутации. Таким образом становится ясно, что NuGear напоминает два PGT Wolfrom, для которых несущая используется в качестве входа, соединенных последовательно, и где каждый из них соответствует одному из двух этапов, определенных в Barbagelata et al. (2016). Это еще раз указывает на то, что в этой коробке передач будет присутствовать относительно высокий коэффициент скрытой мощности.Для передаточного числа 1: 100 и при условии сбалансированного усиления 1:10 на каждой из двух ступеней, как предложено в Barbagelata et al. (2016), мы получаем, используя уравнения, выведенные в Приложении I, коэффициент скрытой мощности 32, что указывает на топологическую эффективность, аналогичную таковой у Wolfrom PGT.
Рисунок 8 . Внутренняя конфигурация двухступенчатой коробки передач NuGear для версии с оппозитными контактами планет адаптирована из CAxMan (2020) с разрешения © Stam S.r.l. Он также включает схему базовой топологии.
Еще предстоит подтвердить, в какой степени использование методов аддитивного производства может помочь STAM s.r.l. снизить большие затраты на производство конических зубчатых колес, а также определить, сможет ли операция нутации достичь достаточной надежности и более компактной формы, которые могут открыть дверь для его использования в области робототехники (CAxMan, 2020).
Двусторонний привод
Компания FUJILAB в Иокогаме предложила в Fujimoto (2015) коробку передач с высокой степенью управляемости для робототехники, которая особенно подходит для работы без датчика крутящего момента (Kanai and Fujimoto, 2018).
Как видно из рисунка 9, конфигурация этого устройства снова аналогична PGT от Wolfrom. При такой топологии Fujimoto et al. смогли достичь при передаточном числе 1: 102 КПД при движении вперед 89,9% и КПД при движении задним ходом 89,2%. Пусковой крутящий момент без нагрузки в обратном направлении составил 0,016 Нм в коробке передач с внешним диаметром ~ Φ50 мм (Kanai and Fujimoto, 2018). Стратегия достижения такой высокой эффективности с топологией Wolfrom заключается в оптимизации коэффициентов сдвига профиля (Fujimoto and Kobuse, 2017).
Рисунок 9 . Внутренняя конфигурация двустороннего привода, высокоэффективной коробки передач, способной обеспечивать передаточное число 1: 102 с использованием топологии Wolfrom, любезно предоставлено © Yasutaka Fujimoto.
Эти многообещающие результаты — см. Таблицу 4 — показывают, что выравнивание соотношений подвода и углубления посредством оптимизации коэффициентов смещения профиля может привести к чрезвычайно высокой эффективности зацепления. Насколько известно авторам, эта стратегия была первоначально предложена Хори и Хаяши (1994) и особенно интересна в топологии Wolfrom, где она может в конечном итоге обеспечить эффективность выше 90% в сочетании с высокими передаточными числами и компактными топологиями.
Привод подшипника шестерни
Вслед за новаторской работой в этой области Джона М. Враниша из НАСА, результатом которой стало изобретение планетарной шестерни без водила во Вранише (1995) и подшипников частичной зубчатой передачи (Враниш, 2006), NASA Goddard Space Центр управления полетами представил свою концепцию нового зубчатого подшипника в Вайнберге и др. (2008).
Северо-Восточный университет в Бостоне продолжил разработку этого нового привода для применения в роботизированных соединениях.Как видно на Рисунке 10, он включает в себя коробку передач Wolfrom, адаптированную для включения конструкции Vranish без опоры и зубчатых подшипников. Подшипники шестерен представляют собой контакты качения, которые предусмотрены для каждой пары зубчатых колес в соответствии с их делительным диаметром и уменьшают нагрузку на подшипники коробки передач (Brassitos et al., 2013). Эта топология обеспечивает удобную интеграцию электромотора, который, следовательно, встроен в полую часть большого солнечного зубчатого колеса в конфигурации, специально предназначенной для космических приложений (Brassitos and Jalili, 2017).
Рисунок 10 . Внутренняя конфигурация зубчатого подшипника, включая встроенный бесщеточный двигатель, адаптирована из Brassitos and Jalili (2017) с разрешения © 2017 Американское общество инженеров-механиков ASME. Справа также показана лежащая в основе топология Wolfrom с расщепленным реакционным кольцом.
В Brassitos and Jalili (2018) металлический прототип привода с зубчатым подшипником с передаточным числом 1:40 характеризуется жесткостью, трением и кинематической погрешностью.Измерения полностью соответствуют данным FUJILAB и подтверждают низкий пусковой момент без нагрузки в этой конфигурации (0,0165 Нм для внешнего диаметра коробки передач ~ 100 мм). После экспериментального измерения жесткости, трения и кинематической погрешности их привода (Brassitos and Jalili, 2018) интегрировали эти значения в динамическую модель, которая затем была смоделирована и сравнена с откликом скорости разомкнутого контура системы при свободном синусоидальном движении, показав хорошие результаты. корреляция и предлагает очень удобную высокую линейность передачи.
Предварительные измерения показали хороший комбинированный КПД двигателя и коробки передач Wolfrom с передаточным числом 1: 264 (Brassitos et al., 2013), что не очень хорошо коррелирует с рассчитанным скрытым коэффициентом мощности 196. КПД не был определен. снова в центре внимания недавних статей авторов, и мы, к сожалению, не смогли на данный момент подтвердить окончательные уровни эффективности, которых могут достичь новые прототипы.
В любом случае, привод с зубчатым подшипником дает очень интересные возможности для использования потенциала топологии Wolfrom в робототехнике.Возможность удаления несущего элемента и встраивания электродвигателя в коробку передач в общем корпусе позволяет получить впечатляюще компактные конструкции. Возможность использования продольных роликов зубчатых подшипников для уменьшения радиальной нагрузки на подшипники также является многообещающим вариантом для повышения компактности и повышения эффективности (Brassitos et al., 2019).
Галакси Драйв
Schreiber and Schmidt (2015) защищает основные инновации, включенные в Galaxie Drive, коробку передач, которую WITTENSTEIN в настоящее время выводит на рынок прецизионных редукторов через свой стартап Wittenstein Galaxie GmbH, созданный в апреле 2020 года.
Хотя таблица данных и подробная информация еще не доступны, также раскрыты принцип работы и ожидаемая прибыль. Galaxie Drive представляет новый кинематический подход, основанный на линейном наведении единственного зуба в зубчатом каркасе Teeth Carrier , но, по словам этих авторов, его топология напоминает топологию деформационно-волнового механизма, см. Рис. 11. Гибкая линия заменена зубцами Держатель, включающий два ряда отдельных зубцов, выполнен с возможностью радиального перемещения и зацепления с круговым шлицем в качестве вращающегося многоугольного вала выполняет роль генератора волн с многоугольным периметром (Schreiber and Röthlingshöfer, 2017).Следовательно, несколько отдельных зубьев входят в зацепление одновременно с круговым шлицем — так же, как в Harmonic Drive. По словам производителя, это вместе с двухточечным контактом с высокой устойчивостью к крутящему моменту между каждым отдельным зубом и зубчатым каркасом обеспечивает этому устройству характерный нулевой люфт, высокую жесткость на кручение и эталонное соотношение крутящего момента к весу.
Рисунок 11 . Деталь зацепления зубьев коробки передач Galaxy (R) DF адаптирована из Schreiber (2015) с разрешения © 2020 Wittenstein Galaxie GmbH.Он включает схему базовой топологии KHV.
В ходе прямого обмена мнениями представители Виттенштейна подтвердили, что очевидная проблема трения между отдельными зубьями и их направляющим круговым кольцом решена, и Galaxie может достичь максимальной эффективности выше 90%. Из-за лежащей в основе конфигурации KHV ожидаются большие коэффициенты скрытой мощности, но пока невозможно получить дальнейшее представление об эффективности зацепления, которая будет результатом радиального движения зубьев, которое включает новую логарифмическую спиральную боковую поверхность зуба (Мишель, 2015).
Первоначально привод Galaxie Drive предназначался для высокоточного оборудования, где высокая жесткость и сопротивление крутящему моменту могут помочь увеличить скорость и повысить производительность. В будущем мы, безусловно, сможем оценить потенциал этой инновационной технологии также для робототехнических приложений.
Обсуждение
Новое поколение робототехнических устройств меняет приоритеты в выборе подходящих коробок передач. Вместо высочайшей точности на высоких скоростях эти устройства предъявляют более строгие требования к легким и очень эффективным устройствам с механическим усилением.
Сверхлегкие приводы деформационных волн (HD, E-cyclo), безусловно, находятся в очень хорошем положении для удовлетворения этих потребностей, что подтверждается их нынешним доминированием в области коботов. При рассмотрении привода волны деформации для роботизированной задачи pHRI работа при низких крутящих моментах и скоростях должна быть сведена к минимуму, если эффективность должна быть максимальной. Хотя их оптимизированная геометрия зубьев способствует более линейной жесткости на кручение, трение остается очень нелинейным и зависит от направления, вызывая также определенные ограничения использования.Храповик как следствие ударной нагрузки — еще одно ограничение, которое следует учитывать для этого типа редуктора, которое E-Cyclo не должен иметь (SUMITOMO, 2020).
Циклоидные приводыпрошли долгий путь, чтобы в конечном итоге стать доминирующей технологией в промышленных роботах. Благодаря технологическим достижениям, направленным на уменьшение люфта и ограничений скорости ввода, теперь они могут обеспечивать хорошую точность с приемлемой эффективностью, несмотря на высокие скрытые коэффициенты мощности, возникающие из-за лежащей в основе топологии KHV, эквивалентной топологии приводов с волновой деформацией.Использование ступени перед зацеплением также вносит важный вклад в достижение этой цели за счет повышения базовой топологической эффективности. Сверхлегкие конструкции, подобные конструкции SPINEA, демонстрируют интересный потенциал, но в конечном итоге потребуются более прорывные подходы, такие как пластиковые материалы, чтобы удовлетворить потребности в более легких коробках передач и более высоких передаточных числах, необходимых для HRI. Пока это не станет возможным, циклоидные приводы можно рассматривать только для больших полезных нагрузок, когда их больший вес и результирующая инерция не критичны для работы.Когда исключительная точность не требуется, можно избежать мер компенсации люфта в пользу повышения эффективности и более низких пусковых моментов. В любом случае следует позаботиться о том, чтобы адекватно управлять пульсацией крутящего момента, и, вероятно, необходимо будет остаться на этапе перед включением, чтобы обеспечить высокие скорости входного двигателя.
Невозможность планетарных редукторов уменьшить люфт при сохранении хорошей производительности и ограничения жесткости на кручение ограничили их использование в промышленной робототехнике. Тем не менее, PGT чрезвычайно универсальны, что демонстрирует их широкое использование во множестве современных промышленных устройств.И они изначально эффективны, надежны и относительно просты — дешевы — в производстве. Это может объяснить недавний интерес робототехников к PGT и почему пять из шести изученных здесь принципиально инновационных редукторов основаны на конфигурации PGT с высоким передаточным числом: топологии Wolfrom. Лучшая топологическая эффективность в сочетании с улучшением эффективности зацепления за счет модификации профиля или даже еще одного шага вперед по замене зубьев контактами качения являются многообещающими характеристиками. В сочетании с возможностями, открываемыми их полой топологией, эти элементы потенциально могут привести к возвращению PGT в робототехнику.
Наше исследование показывает, что большая универсальность технологий редукторов, используемых в робототехнике, представляет собой серьезную проблему для прямого сравнения их характеристик. Как показывают примеры люфта и максимальной входной скорости, адекватные модификации конструкции могут надлежащим образом компенсировать большинство исходных слабых мест определенной технологии за счет компромиссов в других аспектах, обычно включая эффективность, размер, вес и стоимость. Точно так же большие скрытые коэффициенты мощности указывают на существенный топологический недостаток с точки зрения эффективности, но он также может быть — по крайней мере частично — компенсирован соответствующими модификациями.Таким образом, обучающий эффект заключается в том, что выбор подходящей технологии редуктора для определенного применения pHRI является чрезвычайно сложным процессом, требующим глубокого понимания фундаментальных недостатков, возможностей улучшения и производных компромиссов каждой технологии. Наша первоначальная цель исследования — внести свой вклад в простую таблицу выбора, способную помочь неопытным робототехникам в выборе подходящих технологий редукторов для своих роботизированных устройств, поэтому не могла быть достигнута.Вместо этого в этой статье собраны и объясняются основные параметры выбора и связанные с ними проблемы в каждой из доступных технологий, чтобы помочь инженерам-роботам pHRI развить необходимые навыки, необходимые для осознанного выбора подходящей, индивидуально оптимизированной коробки передач.
Два важных аспекта роботизированных редукторов для pHRI, к сожалению, не могут быть адекватно оценены в нашем исследовании на данном этапе: шум и стоимость. По мере того как робототехнические устройства становятся все ближе к людям, робототехники уделяют все больше внимания шуму.Редукторы, безусловно, представляют собой важный источник шума (переносимого воздухом и конструкцией), но, к сожалению, на данном этапе рекомендуется исключить шум из нашего анализа по двум основным ограничениям. Во-первых, большинство производителей редукторов еще не предоставляют количественных оценок шумовых характеристик, и когда они это делают, они, как правило, следуют другим методам испытаний, которые также не особенно подходят для рабочих условий в pHRI. Во-вторых, современные технологии коробок передач все еще должны пройти ожидаемый процесс оптимизации шума.
Стоимость также является важным параметром, делающим технологии pHRI более доступными, и поэтому становится важным при выборе подходящих редукторов для будущих робототехнических технологий. К сожалению, и здесь научному сообществу доступно недостаточное количество исходной информации для систематической справедливой оценки крупномасштабного экономического потенциала определенной технологии редукторов. Прежде чем можно будет определить подходящую основу для оценки этого потенциала, требуется большой объем исследовательской работы, которая явно выходит за рамки нашего исследования.
Эти два ограничения очерчивают основные рекомендации авторов по интересным направлениям будущих исследований. Определение стандартных условий испытаний на воздушный и конструкционный шум в коробках передач, особенно адаптированных к типичным условиям эксплуатации и потребности в pHRI, могло бы позволить прямое сравнение различных технологий и способствовать их оптимизации шума. Кроме того, составление доступных моделей затрат для производственных процессов, связанных с изготовлением коробок передач, и их адаптация к специфике конкретных технологий, используемых в робототехнике, позволит составить основу для оценки потенциала крупномасштабных затрат (и препятствий) разные технологии.
Авторские взносы
Все авторы принимали участие в предварительной работе, связанной с этой темой исследования, и внесли свой вклад в концептуализацию структуры, представленной в рукописи. PG работала над созданием подходящей системы оценки для выполнения анализа коробки передач и взяла на себя инициативу в написании рукописи и преобразовании ее в ее нынешнюю форму. PG и ES в равной степени способствовали выявлению потенциально подходящих технологий и их анализу с помощью структуры.Все корректуры авторов прочитали и внесли свой вклад в окончательную версию статьи.
Финансирование
SC, ES (доктор философии) и TV (доктор наук) являются научными сотрудниками Исследовательского фонда Фландрии — Fonds voor Wetenschappelijk Onderzoek (FWO). Эта работа частично финансируется Программой исследований и инноваций Европейского Союза Horizon 2020 в рамках Соглашения о гранте № 687662 — проект SPEXOR.
Конфликт интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могут быть истолкованы как потенциальный конфликт интересов.
Благодарности
Авторы хотели бы поблагодарить профессора Ясутака Фудзимото из Йокогамского национального университета, а также компании Neugart GmbH, Harmonic Drive SE, Sumitomo Drive Germany GmbH, Genesis Robotics, Innovative Mechatronic Systems B.V., Stam s.r.l. и Wittenstein Galaxy GmbH за любезную поддержку и полученные объяснения, а также за разрешение использовать прилагаемые изображения их устройств.
Дополнительные материалы
Дополнительные материалы к этой статье можно найти в Интернете по адресу: https: // www.frontiersin.org/articles/10.3389/frobt.2020.00103/full#supplementary-material
Список литературы
Альбу-Шеффер, А., Эйбергер, О., Гребенштейн, М., Хаддадин, С., Отт, К., Вимбок, Т. и др. (2008). Мягкая робототехника. Робот IEEE. Автомат. Mag. 15, 20–30. DOI: 10.1109 / MRA.2008.9
CrossRef Полный текст | Google Scholar
Arigoni, R., Cognigni, E., Musolesi, M., Gorla, C., and Concli, F. (2010). «Планетарные редукторы: эффективность, люфт, жесткость» в Международной конференции VDI по зубчатым колесам (Мюнхен).
Google Scholar
Арнаудов, К., Караиванов, Д. (2005). «Планетарные зубчатые передачи с высшим составом» в Международная конференция VDI по зубчатым колесам , Vol. 1904 (Мюнхен: VDI-Bericht), 327–344.
Барбагелата А. и Корсини Р. (2000). Riduttore Ingranaggi Conici Basculanti . Патент Италии № IT SV20000049A1. Рим: Ufficio Italiano Brevetti e Marchi.
Барбагелата А., Эллеро С. и Ландо Р. (2016). Планетарный редуктор .Европейский патент № EP2975296A2. Мюнхен: Европейское патентное ведомство.
Брасситос, Э., Джалили Н. (2017). Разработка и разработка компактного высокомоментного роботизированного привода для космических механизмов. J. Mech. Робот. 9, 061002-1–061002-11. DOI: 10.1115 / 1.4037567
CrossRef Полный текст | Google Scholar
Брасситос, Э., Джалили Н. (2018). «Определение характеристик жесткости, трения и кинематической погрешности в трансмиссиях с зубчатыми подшипниками», в ASME 2018 International Design Engineering Technical Conference и Computers and Information in Engineering Conference (Квебек: цифровая коллекция Американского общества инженеров-механиков).DOI: 10.1115 / DETC2018-85647
CrossRef Полный текст | Google Scholar
Brassitos, E., Mavroidis, C., and Weinberg, B. (2013). «Зубчатый подшипниковый привод: новый компактный привод для роботизированных шарниров», в ASME 2013 Международная техническая конференция по проектированию и Компьютеры и информация в инженерной конференции (Портленд, Орегон: цифровая коллекция Американского общества инженеров-механиков). DOI: 10.1115 / DETC2013-13461
CrossRef Полный текст | Google Scholar
Брасситос, Э., Вайнберг, Б., Цинчао, К., и Мавроидис, К. (2019). Контактная система изогнутого подшипника . Патент США № US10174810B2. Вашингтон, округ Колумбия: Бюро по патентам и товарным знакам США.
Google Scholar
Каланка, А., Мурадор, Р., Фиорини, П. (2015). Обзор алгоритмов совместимого управления жесткими и фиксированными роботами. IEEE / ASME Trans. Мех. 21, 613–624. DOI: 10.1109 / TMECH.2015.2465849
CrossRef Полный текст | Google Scholar
Карбоне, Г., Mangialardi, L., и Mantriota, G. (2004). Сравнение характеристик полнотороидальных и полутороидальных тяговых приводов. мех. Мах. Теория 39, 921–942. DOI: 10.1016 / j.mechmachtheory.2004.04.003
CrossRef Полный текст | Google Scholar
Cetinkunt, S. (1991). Проблемы оптимального проектирования в высокоскоростных высокоточных сервосистемах движения. Мехатроника 1, 187–201. DOI: 10.1016 / 0957-4158 (91)
-ACrossRef Полный текст | Google Scholar
Чен, К.и Анхелес Дж. (2006). Потери виртуальной мощности и механические потери мощности в зубчатых зацеплениях планетарных зубчатых передач. ASME J. Mech. Des. 129, 107–113. DOI: 10.1115 / 1.2359473
CrossRef Полный текст | Google Scholar
Чен, Д. З., и Цай, Л. В. (1993). Кинематический и динамический синтез редукторных робототехнических механизмов. J. Mech. Des. 115, 241–246. DOI: 10.1115 / 1.2
3CrossRef Полный текст | Google Scholar
Crispel, S., López-García, P., Verstraten, T., Convens, B., Saerens, E., Vanderborght, B., and Lefeber, D. (2018). «Представляем составные планетарные передачи (C-PGT): компактный способ достижения высоких передаточных чисел для носимых роботов», на Международном симпозиуме по носимой робототехнике (Пиза), 485–489. DOI: 10.1007 / 978-3-030-01887-0_94
CrossRef Полный текст | Google Scholar
Де Сантис А., Сицилиано Б., Де Лука А. и Бикки А. (2008). Атлас физического взаимодействия человека и робота. мех.Мах. Теория 43, 253–270. DOI: 10.1016 / j.mechmachtheory.2007.03.003
CrossRef Полный текст | Google Scholar
Дель Кастильо, Дж. М. (2002). Аналитическое выражение КПД планетарных зубчатых передач. мех. Мах. Теория 37, 197–214. DOI: 10.1016 / S0094-114X (01) 00077-5
CrossRef Полный текст | Google Scholar
Дрессчер, Д., де Врис, Т. Дж., И Страмиджоли, С. (2016). «Выбор мотор-редуктора для повышения энергоэффективности», в Международная конференция IEEE 2016 по усовершенствованной интеллектуальной мехатронике (AIM) (Банф, AB: IEEE), 669–675.DOI: 10.1109 / AIM.2016.7576845
CrossRef Полный текст | Google Scholar
Фудзимото Ю. (2015). Эпициклический зубчатый привод и метод его проектирования . Патент Японии № JP2015164100. Токио: Патентное ведомство Японии.
Fujimoto, Y., and Kobuse, D. (2017). «Роботизированные приводы с высокой управляемостью назад», на международном семинаре IEEJ по обнаружению, срабатыванию, управлению движением и оптимизации (SAMCON) (Нагаока), IS2–1.
GAM (2020 г.). GSL Трансмиссионный редуктор .Каталог.
GENESIS (2018). Усилитель крутящего момента Reflex — движущая сила будущего . Tech Update Общайтесь.
Гиберти Х., Чинквемани С. и Леньяни Г. (2010). Влияние механических характеристик трансмиссии на выбор мотор-редуктора. Мехатроника 20, 604–610. DOI: 10.1016 / j.mechatronics.2010.06.006
CrossRef Полный текст | Google Scholar
Жирар А. и Асада Х. Х. (2017). Использование естественной динамики нагрузки с приводами с регулируемым передаточным числом. Робот IEEE. Автомат. Lett. 2, 741–748. DOI: 10.1109 / LRA.2017.2651946
CrossRef Полный текст | Google Scholar
Горла К., Даволи П., Роза Ф., Лонгони К., Чиоцци Ф. и Самарани А. (2008). Теоретический и экспериментальный анализ циклоидного редуктора скорости. J. Mech. Des. 130: 112604. DOI: 10.1115 / 1.2978342
CrossRef Полный текст | Google Scholar
Groothuis, S. S., Folkertsma, G. A., and Stramigioli, S. (2018). Общий подход к достижению стабильности и безопасного поведения в распределенных роботизированных архитектурах. Фронт. Робот. AI 5: 108. DOI: 10.3389 / frobt.2018.00108
CrossRef Полный текст | Google Scholar
Хаддадин, С., Альбу-Шеффер, А., и Хирцингер, Г. (2009). Требования к безопасным роботам: измерения, анализ и новые идеи. Внутр. J. Робот. Res , 28, 1507–1527. DOI: 10.1177 / 0278364
3970
CrossRef Полный текст | Google Scholar
Хаддадин, С., Крофт, Э. (2016). «Физическое взаимодействие человека и робота», в Springer Handbook of Robotics (Cham: Springer), 1835–1874.DOI: 10.1007 / 978-3-319-32552-1_69
CrossRef Полный текст | Google Scholar
HALODI Robotics (2018). ДВИГАТЕЛЬ с прямым приводом Revo1 ™ [Брошюра], Moss. Доступно в Интернете по адресу: https://www.halodi.com/revo1 (по состоянию на 30 апреля 2020 г.).
Хэм, Р. В., Шугар, Т. Г., Вандерборг, Б., Холландер, К. В., и Лефебер, Д. (2009). Соответствующие конструкции приводов. Робот IEEE. Автомат. Mag. 16, 81–94. DOI: 10.1109 / MRA.2009.9
CrossRef Полный текст | Google Scholar
Гармонический привод A.G. (2014) Технические данные Наборы компонентов CSD-2A . Каталог.
Хлебаня Г., Куловец С. (2015). «Разработка плоскоцентрической коробки передач на основе геометрии S-образной шестерни», в 11. Kolloquium Getriebetechnik (Мюнхен), 205–216.
Google Scholar
Хоган, Н. (1984). «Контроль импеданса: подход к манипуляции», в , 1984, Американская конференция по контролю, (Сан-Диего, Калифорния: IEEE), 304–313. DOI: 10.23919 / ACC.1984.4788393
CrossRef Полный текст | Google Scholar
Хори, К., и Hayashi, I. (1994). Максимальный КПД обычных механических планетарных шестерен парадокса для редуктора. Пер. Jpn. Soc. Мех. Англ. 60, 3940–3947. DOI: 10.1299 / kikaic.60.3940
CrossRef Полный текст
Хантер, И. В., Холлербах, Дж. М., и Баллантайн, Дж. (1991). Сравнительный анализ актуаторных технологий для робототехники. Робот. Ред. 2, 299–342.
Google Scholar
IMSystems (2019). проезд Архимеда.IMSystems — Drive Innovation [Брошюра], Делфт.
Икбал, Дж., Цагаракис, Н. Г., и Колдуэлл, Д. Г. (2011). «Дизайн носимого оптимизированного экзоскелета руки с прямым приводом», в Международной конференции по достижениям в компьютерно-человеческих взаимодействиях (ACHI) (Гозье).
PubMed Аннотация | Google Scholar
Канаи Ю., Фудзимото Ю. (2018). «Бессенсорное управление крутящим моментом для экзоскелета с приводом с использованием приводов с высокой степенью обратного привода», на IECON 2018–44-й ежегодной конференции Общества промышленной электроники IEEE (Вашингтон, округ Колумбия: IEEE), 5116–5121.DOI: 10.1109 / IECON.2018.85
CrossRef Полный текст | Google Scholar
Капелевич А. и ООО «AKGears» (2013). Анализ планетарных передач с высоким передаточным числом. Передаточное отношение 3, 10.
Google Scholar
Караяннидис Ю., Друкас Л., Папагеоргиу Д. и Доулжери З. (2015). Управление роботом для выполнения задач и повышения безопасности при ударах. Фронт. Робот. AI 2:34. DOI: 10.3389 / frobt.2015.00034
CrossRef Полный текст | Google Scholar
Кашири, Н., Abate, A., Abram, S.J., Albu-Schaffer, A., Clary, P.J., Daley, M., et al. (2018). Обзор принципов энергоэффективного передвижения роботов. Фронт. Робот. AI 5: 129. DOI: 10.3389 / frobt.2018.00129
CrossRef Полный текст | Google Scholar
Ким, Дж., Парк, Ф. К., Парк, Ю., и Шизуо, М. (2002). Проектирование и анализ сферической бесступенчатой трансмиссии. J. Mech. Des . 124, 21–29. DOI: 10.1115 / 1.1436487
CrossRef Полный текст | Google Scholar
Классен, Дж.Б. (2019). Дифференциальная планетарная коробка передач . Международный патент № WO2019 / 051614A1. Женева: Всемирная организация интеллектуальной собственности, Международное бюро.
Google Scholar
Коряков-Савойский Б., Алексахин И., Власов И. П. (1996). Зубчатая передача . Патент США № US5505668A. Вашингтон, округ Колумбия: Бюро по патентам и товарным знакам США.
Google Scholar
Ли С. (2014). «Новейшие технологии проектирования зубчатых передач с большими передаточными числами», в материалах Proceedings of International Gear Conference (Lyon), 427–436.DOI: 10.1533 / 9781782421955.427
CrossRef Полный текст | Google Scholar
Луман, Дж. (1996). Zahnradgetriebe (Зубчатые механизмы) . Берлин: Springer-Verlag. DOI: 10.1007 / 978-3-540-89460-5
CrossRef Полный текст
Лопес-Гарсия, П., Криспель, С., Верстратен, Т., Сэренс, Э., Конвенс, Б., Вандерборгт, Б., и Лефебер, Д. (2018). «Конструкция планетарного редуктора для активной носимой робототехники, основанная на анализе видов отказов и последствий (FMEA)», в International Symposium on Wearable Robotics (Pisa), 460–464.DOI: 10.1007 / 978-3-030-01887-0_89
CrossRef Полный текст | Google Scholar
Лопес-Гарсия, П., Криспель, С., Верстратен, Т., Сэренс, Э., Вандерборгт, Б., и Лефебер, Д. (2019a). «Редукторы Wolfrom для легкой робототехники, ориентированной на человека», в материалах Proceedings of the International Conference on Gears 2019 (Мюнхен: VDI), 753–764.
Лопес-Гарсия, П., Криспель, С., Верстратен, Т., Сэренс, Э., Вандерборгт, Б., и Лефебер, Д. (2019b). «Настройка планетарных зубчатых передач для поддержки и воспроизведения конечностей человека», в MATEC Web of Conferences (Варна: EDP Sciences), 01014.DOI: 10.1051 / matecconf / 2011014
CrossRef Полный текст | Google Scholar
Лафлин, К., Альбу-Шеффер, А., Хаддадин, С., Отт, К., Стеммер, А., Вимбек, Т., и Хирцингер, Г. (2007). Легкий робот DLR: концепции проектирования и управления роботами в среде обитания человека. Ind. Робот. Int. J . 34, 376–385. DOI: 10.1108 / 014390774386
CrossRef Полный текст | Google Scholar
Макмиллан Р. Х. и Дэвис П. Б. (1965). Аналитическое исследование систем раздвоенной передачи энергии. J. Mech. Англ. Sci . 7, 40–47. DOI: 10.1243 / JMES_JOUR_1965_007_009_02
CrossRef Полный текст | Google Scholar
Mayr, C. (1989). Präzisions-Getriebe für die Automation: Grundlagen und Anwendungsbeispiele . Ландсберг: Verlag Moderne Industrie.
Мишель С. (2015). Logarithmische spirale statt evolvente. Maschinenmarkt № . 18, 40–42.
Михайлидис А., Афанасопулос Э. и Оккас Э. (2014). «Эффективность циклоидного редуктора», в International Gear Conference (Lyon Villeurbanne), 794–803.DOI: 10.1533 / 9781782421955.794
CrossRef Полный текст | Google Scholar
Морозуми, М. (1970). Эвольвентное внутреннее зацепление со смещением профиля . Патент США № US3546972A. Вашингтон, округ Колумбия: Бюро по патентам и товарным знакам США.
Google Scholar
Мюллер, Х. В. (1998). Die Umlaufgetriebe: Auslegung und vielseitige Anwendungen . Берлин; Гейдельберг: Springer-Verlag. DOI: 10.1007 / 978-3-642-58725-2
CrossRef Полный текст | Google Scholar
Мульцер, Ф.(2010). Systematik hoch übersetzender koaxialer getriebe (Докторская диссертация). Технический университет Мюнхена, Мюнхен, Германия.
Google Scholar
Musser, C. W. (1955). Деформационно-волновая передача . Патент США № US2
3A. Вашингтон, округ Колумбия: Бюро по патентам и товарным знакам США.
НАБТЕКО (2018). Прецизионный редуктор серии RV — N . CAT.180410. Каталог.
Нойгарт, А. Г. (2020). PLE Линия эконом-класса .Каталог.
Ниманн Г., Винтер Х. и Хён Б. Р. (1975). Maschinenelemente, Vol. 1 . Берлин; Гейдельберг; Нью-Йорк, штат Нью-Йорк: Спрингер.
Google Scholar
Pasch, K. A., and Seering, W. P. (1983). «О приводных системах для высокопроизводительных машин», в Машиностроение (Нью-Йорк, Нью-Йорк: Машиностроение Общества ASME-AMER), 107–107.
Pennestri, E., and Freudenstein, F. (1993). Механический КПД планетарных зубчатых передач. ASME J. Mech. Des . 115, 645–651. DOI: 10.1115 / 1.29
CrossRef Полный текст | Google Scholar
Петтерссон, М., и Олвандер, Дж. (2009). Оптимизация трансмиссии промышленных роботов. IEEE Trans. Робот. 25, 1419–1424. DOI: 10.1109 / TRO.2009.2028764
CrossRef Полный текст | Google Scholar
Фам, А. Д., и Ан, Х. Дж. (2018). Прецизионные редукторы для промышленных роботов, участвующих в четвертой промышленной революции: современное состояние, анализ, дизайн, оценка производительности и перспективы. Внутр. J. Precis. Англ. Manuf. Green Technol. 5, 519–533. DOI: 10.1007 / s40684-018-0058-x
CrossRef Полный текст | Google Scholar
Резазаде, С., Херст, Дж. У. (2014). «Об оптимальном выборе двигателей и трансмиссий для электромеханических и робототехнических систем», в Международная конференция IEEE / RSJ 2014 по интеллектуальным роботам и системам (Чикаго, Иллинойс: IEEE), 4605–4611. DOI: 10.1109 / IROS.2014.6943215
CrossRef Полный текст | Google Scholar
Роос, Ф., Йоханссон, Х., Викандер, Дж. (2006). Оптимальный выбор двигателя и редуктора для мехатронных приложений. Мехатроника 16, 63–72. DOI: 10.1016 / j.mechatronics.2005.08.001
CrossRef Полный текст | Google Scholar
Розенбауэр Т. (1995). Getriebe für Industrieroboter: Beurteilungskriterien . Kenndaten, Einsatzhinweise: шейкер.
Россман, А. М. (1934). Механизм . Патент США № US 1970251. Вашингтон, округ Колумбия: У.S. Ведомство по патентам и товарным знакам.
Google Scholar
Saerens, E., Crispel, S., García, P. L., Verstraten, T., Ducastel, V., Vanderborght, B., and Lefeber, D. (2019). Законы масштабирования для роботизированных трансмиссий. мех. Мах. Теория 140, 601–621. DOI: 10.1016 / j.mechmachtheory.2019.06.027
CrossRef Полный текст | Google Scholar
Шафер И., Бурлье П., Хантшак Ф., Робертс Э. У., Льюис С. Д., Форстер Д. Дж. И Джон К. (2005). «Космическая смазка и характеристики шестерен гармонического привода», , 11-й Европейский симпозиум по космическим механизмам и трибологии, ESMATS 2005 (Люцерн), 65–72.
Google Scholar
Шейнман, В., Маккарти, Дж. М., и Сонг, Дж. Б. (2016). «Механизм и приведение в действие», в Springer Handbook of Robotics (Cham: Springer), 67–90. DOI: 10.1007 / 978-3-319-32552-1_4
CrossRef Полный текст | Google Scholar
Шемпф, Х. (1990). Сравнительное проектирование, моделирование и анализ управления роботизированными трансмиссиями (кандидатская диссертация). № WHOI-90-43. Кафедра машиностроения и Океанографический институт Вудс-Холла, Массачусетский технологический институт, Кембридж, Массачусетс, США.DOI: 10.1575 / 1912/5431
CrossRef Полный текст | Google Scholar
Шемпф, Х. и Йоргер, Д. Р. (1993). Исследование доминирующих рабочих характеристик в трансмиссиях роботов. ASME J. Mech. Des. 115, 472–482. DOI: 10.1115 / 1.2
4
CrossRef Полный текст | Google Scholar
Шорш, Дж. Ф. (2014). Составной планетарный привод трения . Патент Нидерландов № 2013496. Де Хааг: Octrooicentrum Nederland.
Google Scholar
Шрайбер, Х.(2015). «Revolutionäres getriebeprinzip durch neuinterpretation von maschinenelementen — Die WITTENSTEIN Galaxie®-Kinematik», в Dresdner Maschinenelemente Kolloquium, DMK (Дрезден), 2015. S.
Шрайбер, Х., Рётлингсхёфер, Т. (2017). «Кинематическая классификация коробки передач, содержащей отдельные упорные зубья, и ее преимущества по сравнению с существующими подходами», в Международной конференции по зубчатым колесам , ICG (Мюнхен).
Шрайбер, Х., и Шмидт, М.(2015). Getriebe. Патент Германии № DE 10 2015 105 525 A1. Мюнхен: Deutsches Patent- und Markenamt.
Google Scholar
Сенсинджер, Дж. У. (2010). «Выбор двигателей для роботов, использующих биомиметические траектории: оптимальные критерии, обмотки и другие соображения», в Международная конференция IEEE по робототехнике и автоматизации, 2010 г., (Анкоридж, AK: IEEE), 4175–4181. DOI: 10.1109 / ROBOT.2010.5509620
CrossRef Полный текст | Google Scholar
Сенсингер, Дж.W. (2013). КПД высокочувствительных зубчатых передач, таких как циклоидные передачи. ASME J. Mech. Des. 135, 071006-1–071006-9. DOI: 10.1115 / 1.4024370
CrossRef Полный текст | Google Scholar
Сенсинджер, Дж. У., Кларк, С. Д., Шорш, Дж. Ф. (2011). «Внешний и внутренний роторы в роботизированных бесщеточных двигателях», Международная конференция IEEE по робототехнике и автоматизации, 2011 г., (Монреаль, Квебек, IEEE), 2764–2770. DOI: 10.1109 / ICRA.2011.5979940
CrossRef Полный текст | Google Scholar
Сеок, С., Wang, A., Chuah, M. Y. M., Hyun, D. J., Lee, J., Otten, D. M., et al. (2014). Принципы разработки энергоэффективного передвижения на ногах и их реализация на роботе гепарда Массачусетского технологического института. IEEE / ASME Trans. Мех. 20, 1117–1129. DOI: 10.1109 / TMECH.2014.2339013
CrossRef Полный текст | Google Scholar
Сицилиано Б., Шавикко Л., Виллани Л. и Ориоло Г. (2010). Робототехника: моделирование, планирование и управление . Лондон: Springer Science and Business Media. DOI: 10.1007 / 978-1-84628-642-1
CrossRef Полный текст | Google Scholar
Слэттер Р. (2000). Weiterentwicklung eines Präzisionsgetriebes für die Robotik . Санкт-Леонард: Antriebstechnik.
Google Scholar
SPINEA (2017). TwinSpin — высокоточные редукторы — Präzisionsgetriebe . Каталог.
Страмиджоли, С., Ван Оорт, Г., и Дертьен, Э. (2008). «Концепция нового энергоэффективного привода», в Международная конференция IEEE / ASME 2008 по передовой интеллектуальной мехатронике (Сиань: IEEE), 671–675.DOI: 10.1109 / AIM.2008.4601740
CrossRef Полный текст | Google Scholar
СУМИТОМО (2017). Fine Cyclo® Spielfreie Präzisionsgetriebe . Каталог 9 DE 02/2017.
СУМИТОМО (2020). Приводы управления движением E-Cyclo®. Каталог F10001E-1.
Талбот Д., Кахраман А. (2014). «Методика прогнозирования потерь мощности планетарных передач», в International Gear Conference (Lyon-Villeurbanne), 26–28. DOI: 10.1533 / 9781782421955.625
CrossRef Полный текст
Томчик, Х. (2000). Регулирующее устройство с планетарной передачей . Европейский патент № EP1244880B1. Мюнхен: Европейское патентное ведомство.
Google Scholar
Toxiri, S., Näf, M. B., Lazzaroni, M., Fernández, J., Sposito, M., Poliero, T., et al. (2019). «Экзоскелеты с опорой на спину для профессионального использования: обзор технологических достижений и тенденций», в IISE Trans. Ок. Эргон. Гм. Факторы 7, 3–4, 237–249.DOI: 10.1080 / 24725838.2019.1626303
CrossRef Полный текст | Google Scholar
Ван де Стрете, Х. Дж., Дегезель, П., Де Шуттер, Дж. И Бельманс, Р. Дж. (1998). Критерий выбора серводвигателя для мехатронных приложений. IEEE / ASME Trans. Мех. 3, 43–50. DOI: 10.1109 / 3516.662867
CrossRef Полный текст | Google Scholar
Вел, А. Дж., И Се, С. К. (2016). На пути к совместимым и пригодным для носки роботизированным ортезу: обзор текущих и новых актуаторных технологий. Med. Англ. Phys. 38, 317–325. DOI: 10.1016 / j.medengphy.2016.01.010
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Verstraten, T., Furnémont, R., Mathijssen, G., Vanderborght, B., and Lefeber, D. (2016). «Энергопотребление мотор-редукторов постоянного тока в динамических приложениях: сравнение подходов к моделированию» в IEEE Robot. Автомат. Lett. 1, 524–530. DOI: 10.1109 / LRA.2016.2517820
CrossRef Полный текст | Google Scholar
Враниш, Дж.М. (1995). Планетарный привод без носителя с люфтом . Патент США № US5409431. Вашингтон, округ Колумбия: Бюро по патентам и товарным знакам США.
Google Scholar
Враниш, Дж. М. (2006). Подшипники с частичным зубчатым зацеплением . Патент США № US2006 / 0219039A1. Вашингтон, округ Колумбия: Бюро по патентам и товарным знакам США.
Google Scholar
Ван, А., Ким, С. (2015). «Направленная эффективность в редукторных трансмиссиях: характеристика обратного движения в сторону улучшенного проприоцептивного контроля», в IEEE International Conference on Robotics and Automation (ICRA), 2015 г., (Сиэтл, Вашингтон, IEEE), 1055–1062.DOI: 10.1109 / ICRA.2015.7139307
CrossRef Полный текст | Google Scholar
Вайнберг, Б., Мавроидис, К., и Враниш, Дж. М. (2008). Привод подшипника шестерни . Патент США № US2008 / 0045374A1. Вашингтон, округ Колумбия: Бюро по патентам и товарным знакам США.
Google Scholar
WinterGreen Research (2018). Прецизионные редукторы с волновыми редукторами и редукторы RV и RD: доли рынка, стратегия и прогнозы, во всем мире, с 2018 по 2024 годы . WIN0418002.
WITTENSTEIN AG (2020 г.). Technische Broschüre SP + und TP + Getrieben. Каталог.
Вольф, А. (1958). Die Grundgesetze der Umlaufgetriebe . Брауншвейг: Фридр. Vieweg и Sohn.
Вольфром, У. (1912). Der Wirkungsgrad von Planetenrädergetrieben. Werkstattstechnik 6, 615–617.
Ю. Д. и Бичли Н. (1985). О механическом КПД дифференциала. ASME J. Mech. Пер. Автомат. 107, 61–67.DOI: 10.1115 / 1.3258696
CrossRef Полный текст | Google Scholar
Зинн М., Рот Б., Хатиб О. и Солсбери Дж. К. (2004). Новый подход к срабатыванию роботов, удобных для человека. Внутр. J. Робот. Res. 23, 379–398. DOI: 10.1177 / 0278364
2193
CrossRef Полный текст | Google Scholar
Как пользоваться роботизированной коробкой передач. Роботизированная коробка передач
Роботизированная коробка передач — это устройство, подобное механической коробке передач, в котором автоматически выполняются такие функции, как переключение скоростей и отключение сцепления.Принцип работы заключается в том, что водитель на дороге и в «обстоятельствах» движения как следует запускает ту систему, которая управляет, а все остальное делает коробка.
Это обычный день, с некоторыми агломерациями, но также и с небольшим трафиком. Это означает, что это не менее 800 смен в день. Со временем механические коробки передач остались старыми, а вот автоматические коробки были разнообразными. Например, многие классические автоматические трансмиссии имеют функцию автоматического удержания — это означает, что вам не нужно держать ногу на тормозе, что устраняет неудобства автоматической коробки.Эта статья предназначена для того, чтобы пролить немного больше света на эту область, чтобы помочь нам в этом. лучший выбор, когда мы хотим купить подержанный автомобиль.
Такой работает очень экономично, надежно и комфортно. Да и в плюс ко всему, он несколько дешевле обычного автомата. Сейчас практически все марки автомобилей устанавливают эту коробку в машину любого класса.
Описание
РКП отличается от своих предшественников конструкцией. Это обычная МКПП с возможностью управления трансмиссией и сцеплением.Это принцип его работы. Многие штампы данных производителей были взяты за образец обычной механики, например, знаменитый Speedshift, созданный на базе автоматической коробки передач 7G-Tronic. Там заменили только гидротрансформатор на усиление, фрикционы многодисковые на базе фрикционных. Коробки-роботы бывают двух типов:
Для тех, кто увлеченно относится к коробкам передач, мы добавили полезные ссылки. Нажмите на педаль сцепления и снимите ногу с педали акселератора, переключите передачу, поднимите ногу на педали сцепления и нажмите на педаль акселератора.Вообще у машин с 6 скоростями трансмиссия короче — то есть надо чаще менять скорость, да и ускорение на каждой скорости более «вздутое». На машине с 5 скоростями легче ездить по городу, потому что на определенной скорости, конечно, можно больше бежать, но с меньшим «пушистым» ускорением.
Создать такое устройство достаточно известных марок: Mitsubishi, Fiat, Ford, Opel, Peugeot, Audi, Renault, BMW и других. Управляет такой коробкой передач электронная система. Это устройство работает во 2-х режимах:
- автомат;
- полуавтомат.
В первом случае практически вся работа выполняется автоматически (блок управления принимает сигналы с датчиков ввода и вырабатывает алгоритм управления коробкой). Во втором случае можно вручную переключать скорости на селекторе (последовательный режим).
Коробка ручная автомат
Но отличия заключаются в следующем. Минусы: неудобная езда по городу, если вы новичок, можете быстро сломать сцепление. Схема простая: у вас две педали, как автомат, но есть сцепление, в котором вы напрямую не работаете.Робот поднимается к сцеплению, меняет скорость и освобождает сцепление.
Вы воспринимаете это как «автомат». На фоне того, что сцепление быстрее механической коробки передач, оно предназначено для переключения передач. Чтобы не дрожать, нужно почувствовать, когда нужно изменить скорость, затем снять ногу с разгона и снова установить; Исправлена как ручная блокировка.
Фотогалерея
Ниже вы можете посмотреть, как выглядит робот-бокс, и ознакомиться с принципом его работы.
Ручка управления CPP
Отзывы
В настоящее время автоматическая коробка обзавелась большим количеством поклонников и немалым количеством врагов. Кто-то «за», кто-то «против». Чтобы в этом разобраться, предлагаем прочитать вам свежие отзывы.
Ручная коробка передач с двойным захватом
, но требует гораздо меньшего обслуживания. При изменении скорости он также сохраняет небольшие недостатки роботизированной коробки передач. Это также совершенно новый продукт на рынке и немного информации о надежности.Форд поставил эту «автомат» коробку на несколько машин.
Если механическую коробку передач можно отсоединить от двигателя с помощью сцепления, автоматическая коробка — без сцепления — остается подключенной все время. А для его устранения используется «гидротрансформатор» или «гидротрансформатор». Вы можете узнать больше, нажав здесь. В машине есть две педали, которыми вы управляете правой ногой, а именно дроссельная заслонка и тормоз. Сегодня существует множество вариаций этой коробки передач, сначала было 3 скорости, затем 4, а теперь есть автоматические коробки передач с 9 скоростями.
| Положительный | Отрицательный |
| А мне очень нравится, что есть возможность переключать скорости вручную, а все остальное она делает сама. | Эх, робота лучше не брать, купил друг не так давно (), сейчас работа плохая кромка, каждые 10 000 приводов на регулировку. |
| Хорошая штука, просто надо привыкнуть. | Как по мне, обычная механика намного лучше. А робот — самая ненадежная коробка. |
| В пробках то, что нужно! Очень удобно! | Робот не ношу полностью, выбираю механику. |
| Не вижу в этом минусов, все это ерунда! Механика — это какой-то цирк. Управление очень удобное. Оптимальный режим работы двигателя. Можно сказать, исправляет ошибки неопытного водителя. Машина не дергается. | Вообще никому не советую брать робота или вариатор.Самые капризные коробки передач. И очень слабый. Хорошо, если до 10 тысяч дойдут. |
| Уже очень давно езжу на роботе. Хорошая вещь. Мое мнение таково, что проблема не в этом, а в наших дорогах. Да, я согласен, что это было сделано явно не для наших дорог. Но ты стараешься ехать осторожнее и меньше обгоняешь. И все будет хорошо. | Оказывается, этот самый обычный механик, только ручкой подправляет электропривод, а они уже управляют электронным блоком.Так что этот блок завален двумя законопроектами. Так что, как по мне, она лучше обычной гидравлической машины. |
| Очень сильно экономит бензин и в целом все минусы — это только особенности. | Сам роботом не пользуюсь, но отзывы слышал только плохие. Так что лучше брать на механике классику или уже автомат. |
| К этому ящику нужно привыкнуть и летать. А в пробках можно финишировать и ехать на скорости. История! | Очень много минусов! Техника думает за вас, и ваше желание не всегда совпадает.Плюс почти вдвое дороже в обслуживании. Да и сама коробка стоит очень дорого. |
| Отлично! | Большой расход бензина. |
| Максимум подстраивается под водителя, вопросов вообще нет. | Эта коробка абсолютно не подходит для езды по городу. |
| Мне тоже было непривычно после механики, но теперь мне нравится! | Машину нельзя забрать. |
| Не пожалел о том, что купил.Уже один раз в ремонте побывал. | Очень долго подключает сцепление на старте. |
| Вы сначала решаете, может ли проблема быть в вас, а не в коробке. Вещь класс! | Невозможно ехать на большой скорости! |
| Действительно, это коробочка для более опытных водителей И вообще нечего понести! | Такая проблемная коробка передач. Мало кто доживает хотя бы до 50 000 км. |
В этой статье мы рассмотрели принципы работы роботизированной коробки передач, а благодаря отзывам оценили ее возможности и выяснили ее минусы и преимущества.
Видео «Роботизированная коробка передач»
Очень полезная информация О том, как это работает и из чего состоит коробка, вы можете узнать, просмотрев это видео.
Прочитав нашу статью, вы узнали много нового о роботизированной КПП, оставьте свой отзыв!
Автоматические коробки передач предполагают, что вы, как водитель, можете делать в определенной ситуации. Когда вы делаете что-то совершенно непредвиденное, коробка передач замедляется. Минусы: Коробка передач больше весит, дороже в обслуживании, если дороже в ремонте, тормозит, обычно потребляет 1 л на 100 км от той же МКПП.
Эта коробка передач похожа на ручную автоматическую коробку передач, но на самом деле коробки передач две — каждая с муфтой и без «гидротрансформатора» как автомат. Говорят, что это лучшие автоматические коробки на рынке, потому что они очень быстро меняют скорость. По поводу надежности мнения разделились.
Тяговые характеристики двигателей внутреннего сгорания И их адаптивность к нагрузке недостаточна для прямого привода. Для адаптации используются самые разные типы трансмиссий, позволяющие изменять скорость вращения в достаточно широком диапазоне.
Кроме того, такой механизм обеспечивает возможность движения задним ходом, длительную остановку автомобиля с исправным силовым агрегатом.
Минусы: 2 коробки жестче коробки, замена масла на 000 км от представителя, уважаемый. В нем используются не шестерни, а ремень и 4 конуса. Принцип работы напоминает велосипедную цепь, шестерни и пластины. Просто потому, что вместо шестерен конус, а вместо пластин другой конус. У него есть основная муфта, кроме «сцепления» со всеми другими коробками, и вторичная муфта.Лучше фильм посмотреть. По этим коробкам передач тоже есть новый прогресс — по этому есть другой фильм.
Плюсы и минусы роботизированных коробок передач.)
Еще раз: за рулем возникает странное ощущение, отличное от любой другой коробки передач. Это не похоже на самокат, где у вас только одна скорость, но не похоже, что у вас шесть скоростей. Перед тем, как купить машину, узнайте, какую коробку передач вы хотите. Если вы хотите, чтобы ручная коробка была проще. Если вам нужна автоматическая коробка, вам нужно знать, чего ожидать, сколько денег вы хотите сэкономить на обслуживании и как вы хотите чувствовать себя в машине.Вам также необходимо знать, на какие компромиссы вы готовы пойти.
Трансмиссия робота оборудована автоматом для управления работой устройства в заданном режиме с учетом нагрузки и других условий движения. Процесс управляет определенным образом запрограммированным электронным блоком.
Водитель выбирает алгоритм и задает его с помощью селектора, кроме того, он может взять на себя управление работой механизма и переключение как на обычную механику, так и на обычную.
Использование роботизированных боксов обеспечивает водителю максимально комфортные условия. Не нужно отвлекаться и тратить время на переключение передач, а заложенная в процессор программа обеспечивает (в зависимости от условий движения) максимальную экономию топлива.
Большинство ведущих автопроизводителей, в том числе АвтоВАЗ, широко используют коробки передач этого типа на автомобилях разных классов.
Что такое робот-трансмиссия
В настоящее время существует множество различных конструкций механизмов автомобильных трансмиссий.Для ответа на вопрос: Коробка передач — это робот — что это такое? Следует разобраться в ее устройстве, изучить принцип работы и проанализировать достоинства и недостатки. Практически любой сложный механизм имеет свои достоинства и недостатки, устранение которых невозможно без коренной переделки системы.
По сути, роботизированная коробка является логическим развитием традиционной механики. В нем функции управления переключателем трансмиссии автоматизированы и управляются электронным блоком.Кроме того, процессор дает команду механизму корпуса на разукрупнение двигателя и трансмиссии при изменении передаточного числа.
Роботизированная коробка работает в комплексе с другими элементами трансмиссии. Автоматизированное управление согласуется с работой муфты, обеспечивающей переключение.
Устройство и принцип действия
На протяжении всего развития автомобильной промышленности предпринимались многочисленные попытки упростить управление трансмиссией.Первые удачные конструкции роботизированных коробок передач, которые пошли в серию, появились только после оснащения машин процессорами. Все попытки автоматизировать управление с помощью электромеханических и гидравлических устройств не дали положительных результатов.
Они были слишком ненадежными и не обеспечивали приемлемой скорости переключения. Еще одним недостатком ящиков такого типа была неоправданно высокая сложность и, как следствие, доступная стоимость.
Решить все технические проблемы стало возможным только с появлением компактных и недорогих процессоров и датчиков, контролирующих режимы работы двигателя и трансмиссии.
Типовой проект
Многие самостоятельно занимались разработкой этого класса механизмов. Это обеспечило достаточно большое разнообразие конструкций редукторов роботов, однако в них можно выделить общие элементы:
- электронный блок управления;
- МКПП;
- сцепление фрикционного типа;
- система управления трансмиссией и сцеплением.
Часто функцию электронного блока выполняет бортовой компьютер, управляющий работой системы питания и зажигания в совокупности.Процессор устанавливается вне коробки и подключается к нему с помощью кабельных систем. Особое внимание в этом случае уделяется защите компаундов, используются специально разработанные уплотнители. Часто контактные группы покрывают тонким слоем золота для предотвращения окисления.
Рекомендуемые устройства обычно берутся за основу роботизированных боксов. Так, mERCEDES-BENZ При изготовлении агрегата SpeedShift использовалась 7G-Tronic ACP, вместо гидротрансформатора использовалось многодисковое сухое сцепление фрикционного типа.
Баварские автопроизводители компании BMW пошли по тому же пути, оснастив шестиступенчатую механическую коробку автоматизированной системой Control.
Обязательным элементом, обеспечивающим работу коробки, является механизм сцепления. В случае роботизированного устройства применяется конструкция фрикционного типа с одним или несколькими дисками. В последние годы есть трансмиссии с двойным сцеплением, работающими параллельно. Такая конструкция обеспечивает передачу крутящего момента от двигателя без прерывания.
| Тип трансмиссии | С одним сцеплением | С двумя сцеплениями |
| Audi R-Tronic | + | |
| Audi S-Tronic | + | |
| Альфа Ромео Селеспид. | + | |
| BMW SMG. | + | |
| Citroen Sensodrive. | + | |
| Ford Durashift. | + | |
| Ford PowerShift. | + | |
| Lamborghini Isr. | + | |
| Mitsubishi AllShift. | + | |
| Опель Изитроник | + | |
| PEUGEOT 2-TRONIC | + | |
| Порше PDK. | + | |
| Renault Quickshift. | + | |
| Toyota Multimode. | + | |
| Фольксваген ДСГ. | + |
Системы управления сцеплением и трансмиссией бывают двух видов: с электрическим или гидравлическим приводом. У каждого варианта есть свои положительные и отрицательные стороны. Возможны комбинации вышеупомянутых методов управления коробкой, позволяющие максимально использовать преимущества обеих структур и минимизировать их недостатки.
В электрическом приводе сцепления используются серводвигатели, обеспечивающие минимальное энергопотребление. Отрицательным моментом является чрезвычайно малое время переключения (от 300 мс до 500 мс), что приводит к увеличению нагрузки на детали трансмиссии.
Гидравлические приводы работают намного быстрее, это дает возможность оборудовать такими боксами даже спортивные автомобили. На суперкаре Ferrari 599GTo время переключения составляет всего 60 мс, а у LamboGhini Aventador — менее 50 мс. Такие индикаторы обеспечивают данные высокие динамические характеристики при сохранении плавности движения.
Принцип действия
Чтобы понять, как работает роботизированная коробка передач, необходимо получить представление об алгоритме работы ее механизмов.
Водитель заводит двигатель, выжимает педаль тормоза и переводит селектор в определенное положение. Привод сцепления разрывает поток мощности, а исполнительный механизм коробки делает выбранную передачу.
Водитель отпускает тормоз и плавно увеличивает оборот, машина трогается с места.В дальнейшем все переключения производятся автоматически с учетом заданного режима и данных с датчиков. Механизм управляется процессором в соответствии с выбранным алгоритмом. При этом у водителя есть возможность помешать работе коробки.
Видео — Роботизированная КПП (робот):
Полуавтоматический режим роботизированных трансмиссий аналогичен функции ручного управления автоматической коробкой — TipTronic.В этом случае водитель с помощью рычага селектора или переключателей, установленных на рулевой колонке, производит переключение или увеличение передач. Отсюда происходит и другое название роботизированного бокса — последовательный.
Трансмиссия этого типа все чаще применяется на автомобилях. При этом наблюдается следующее разделение: бюджетные модели комплектуются коробками электрических серводвигателей. Ведущие автопроизводители разрабатывают и производят механизмы следующих типов:
- Citroen — Сенсодривод;
- Fiat — Dualogic;
- Ford — Durashift EST;
- Mitsubishi — AllShift;
- Opel — Easytronic;
- Peugeot — tronic;
- Toyota — многомодовый.
Для более дорогих моделей Изготовлено гидроприводов:
- Alfa Romeo — SeleSpeed;
- Audi — R-Tronic;
- BMW — SMG;
- Quickshift от Renault.
Самая современная роботизированная система ISR (Independent Shifting Rods) устанавливается на суперкары Lamborghini.
Отличие роботизированной КПП от АКПП
Разработка и невысокая стоимость электронных блоков управления позволили использовать их серийные модели машин.Коробки передач у них разные и возникает закономерный вопрос — а чем отличается КПП с роботом от пулемета? Если есть отличия, то какой из них будет лучше соответствовать требованиям водителя и на какие характеристики стоит обратить внимание при выборе автомобиля.
Отличие роботизированной коробки от станка заключается в конструкции сцепления. Вместо гидротрансформатора используется одно- или многодисковое сухое сцепление фрикционного типа.
В коробке передач, как и в механике, ведущая и ведомая шестерни находятся в постоянном зацеплении и включаются с помощью специальных муфт. Для уравнения угловых скоростей используются синхронизаторы.
Видео — Тест-драйв Lada Priora с роботом AMT:
В автоматических коробках передач преимущественно используются планетарные редукторы и сложная система управления их работой. В первом и втором варианте передаточное число определяется автоматом. Это освобождает водителя от необходимости отслеживать режимы работы двигателя и переключаться.
По сравнению с автоматической коробкой с роботом лидером по такому показателю, как КПД, является второй прибор. В сухом сцеплении механические потери значительно ниже, чем в гидротрансформаторе.
С другой стороны, машина лучше обеспечивает плавность передвижения и езду на такой машине комфортнее. Еще один недостаток трансмиссии этого типа — дороговизна ремонта, который может выполнить только высококвалифицированный специалист под арт-центром.
При выборе между роботизированным ящиком и автоматом следует учитывать все вышеперечисленные факторы. Для недорогих бюджетных моделей Существенными являются стоимость автомобиля и затраты на его содержание. На момент покупки элитного авто такие вопросы обычно не имеют особого значения. Для водителя практически нет разницы в управлении машиной или роботом.
Плюсы и минусы роботизированной коробки передач
Сложные системы, в которые входят автомобильные трансмиссии, имеют вполне определенные преимущества и недостатки.Ниже приводится анализ плюсов и минусов конструкции и работы роботизированной коробки передач. При этом учитываются динамические, стоимостные и некоторые другие характеристики агрегата.
К списку положительных партий Редукторы С. Роботизированное управление можно отнести:
- Высокая надежность механизма коробки передач, проверенная длительным сроком эксплуатации.
- Использование сухого сцепления фрикционного типа способствует снижению потерь и.
- Небольшое количество рабочей жидкости — масло трансмиссионное Около 3-4 литров, против — 6-8 литров на вариаторе.
- Высокая ремонтопригодность роботизированного бокса (собственно, за основу взята известная механика).
- Автоматика увеличивает ресурс сцепления до 45 — 55% по сравнению с традиционным педальным управлением.
- Наличие полуавтоматического режима, позволяющего водителю вмешиваться в работу агрегата при движении в сложных дорожных условиях на подъеме или в пробке.
Преимущества КПП «Робот» очевидны, что способствует росту популярности этого типа трансмиссии на автомобилях различного класса.Усилиями инженеров и конструкторов агрегат постоянно совершенствуется, улучшаются его характеристики.
Что такое роботизированный контрольно-пропускной пункт? Роботизированная коробка передач (Другое название — автоматическая коробка передач , повседневное название — коробка-робот ) Это механическая коробка передач, в которой функции сцепления и переключения передач автоматизированы. Автоматизация этих функций стала возможной благодаря приложению в управлении коробкой электронных компонентов.
Роботизированная коробка передач сочетает в себе комфорт, надежность и экономичность механической коробки передач.При этом «робот» по большей части намного дешевле классической АКПП.
В настоящее время практически все ведущие автопроизводители оснащают свои автомобили роботизированными коробками передач. Все коробки имеют свои запатентованные названия и различаются по дизайну.
В то же время вы можете выбрать следующее обычное устройство роботизированной коробки передач :
- сцепление;
- МКПП;
- сцепление и зубчатая передача;
- система управления.
Роботы могут иметь коробки с электрическим или гидравлическим приводом Сцепление и редуктор .В электроприводе Исполнительными органами являются сервомеханизмы (электродвигатели). Гидравлический привод осуществляется с помощью гидроцилиндров. В зависимости от типа привода роботизированные трансмиссии имеют устоявшиеся наименования:
- собственно роботизированные коробки передач ( электропривод) ;
- секвентальные коробки передач ( гидраулит, ).
Название «Sequental» поле получено от sequensum — последовательность, означающая последовательное переключение передач в ручном режиме.
Во многих источниках информации редукторы носят одно общее название — роботизированные.
Электропривод Муфты и программы коробчатого исполнения:
- Easytronic от Opel;
- Многомодовый. от Toyota.
Значительно больше конструкций «роботов» имеют гидропривод :
- SMG. , DCT. M DriveLogic от BMW;
- DSG. от Volkswagen;
- S-Tronic от Audi;
- Senso Drive. от Citroen;
- 2-ТРОНИК. от Peugeot;
- Dualogic. от Fiat.
Система управления Роботизированная коробка передач включает в себя следующие конструктивные элементы:
- входных датчиков;
- электронный блок управления;
- КПП исполнительные механизмы.
В роботизированных боксах с гидроприводом к системе управления включен также гидроагрегат , обеспечивающий непосредственное управление гидроцилиндрами и давлением в системе.
Принцип работы роботизированной коробки передач Он следующий: на основе сигналов входных датчиков электронный блок управления формирует алгоритм управления коробкой в зависимости от внешних условий и реализует его через исполнительные механизмы. По команде электронного блока управления гидроцилиндры (или электродвигатели) в нужный момент комплектуются и замыкаются, а также включают подходящую трансмиссию. Водитель с помощью селектора только устанавливает желаемый режим работы робота: например, передний или задний.
На всех роботизированных боксах есть режим ручного переключения передач аналогичный. Например, коробка 2-троник способна работать в трех режимах. Первый полностью автоматический. В этом случае водитель может вообще не думать о переключении передач и ехать как на обычном «автомате». Второй — так называемый полуэкнициал, который включается, если водитель решает сам переключить трансмиссию с помощью крадущихся лепестков, не выходя из автоматического режима. Такая ситуация возникает, например, при обгоне, когда необходимо срочно переключить «ниже».Если резкого разгона не произошло или после возврата в обычный режим езды, коробка через некоторое время снова перейдет в автоматический режим. Третья версия КПП полностью ручная. Однако выбор трансмиссии лежит только на водителе, и здесь не все в его силах — при достижении максимальных оборотов компьютер подаст команду на переход к следующему этапу.
Основным недостатком первых роботизированных коробок передач было отличное время переключения передач (до 2 секунд), что приводило к сбоям и разводам в динамике автомобиля и снижало комфортность управления автомобилем.Решение этой проблемы было найдено в применении коробки передач с двумя сцеплениями, которые обеспечивали переключение передач без нарушения потока мощности.
Весь алгоритм работы коробки с двумя сцеплениями сводится к тому, что пока работает первая передача, она уже ждет вторую и как только блок управления подаст команду, включается второе сцепление, внешнее первичное Вал. И вторая передача. Далее накатал, — ждет сигнала третьей передачи и т. Д.Время переключения сокращено до минимума, даже водитель не сможет так быстро переключить МКП.
Данное техническое решение реализовано в коробках DSG, S-Tronic (время переключения 0,2-0,4 с), а также в коробках SMG и DCT M (Time Shift 0,1C), устанавливаемых на спортивные автомобили BMW.
В настоящее время роботизированные боксы на данный момент являются наиболее распространенными и технически совершенными. Коробки передач DSG и S-Tronic. S-Tronic Box является аналогом коробки DSG, но в отличие от нее устанавливается на задние и полноприводные автомобили.www.systemsauto.ru.
Покупатели при выборе автомобиля во многом обращают внимание на коробку передач, помимо других ее характеристик. Естественно желание людей ездить с комфортом.
Последние современные технологии Предлагаем вниманию новые способы управления автомобилем. Автоматизация меняет механику. Одно из нововведений — роботизированная коробка передач.
Что это такое и как работает?
Роботизированной коробкой передач считается механическая КП, имеющая автоматизированное управление сцеплением и трансмиссией.В противном случае это называется. Такие коробки имеют электрическое или гидравлическое сцепление и редуктор. Зависит от конкретного производителя.
Надо для начала разобраться, как работает роботизированная коробка передач. Принцип его работы такой же, как и у механического. Разница в том, что сервоприводы (исполнительные механизмы) задействованы в работе сцепления и выборе передачи. Сюда входит электродвигатель с коробкой передач и привод. Также есть гидроприводы.
1 — блок управления; 2 — сервопривод сцепления; 3 — сервопривод переключения передач; 4 — Датчик частоты вращения первичного вала.
Каковы основные особенности управления роботизированной трансмиссией?
Роботизированная коробка передач имеет собственное управление. К основным можно отнести следующий фактор: управление осуществляется с помощью специального блока на электронной основе, воздействующего на два исполнительных механизма.
Первый сервопривод отвечает за сцепление, а второй управляет работой синхронизаторов, которые отвечают за включение необходимых передач. Такой подход позволяет освободить водителя от нажатия на педаль.Все функции берет на себя электроника.
Работу смарт-бокса можно проводить в:
С автоматом переключение передач происходит по команде компьютера, который учитывает многие показатели (обороты двигателя, обороты, данные систем aBS, ESP и другие). В ручном режиме человек с рычагом селектора или бесконтактными переключателями дает команду на переключение.
Видео: Принцип работы сцепления и переключения передач на роботизированной коробке передач.
Плюсы и минусы использования роботизированной коробки передач
Появилась такая возможность управлять коробкой передач сравнительно недавно, но при этом довольно быстро приобрела своих приверженцев.Ведь ездить на роботизированной трансмиссии по отзывам некоторых — удобно и комфортно.
Но, использование роботизированной коробки передач, как и любой другой вариант, имеет свои достоинства и недостатки. Естественно, о них следует знать при выборе варианта управления. Выявить такие моменты позволили многочисленные испытания коробки робота.
Плюсы использования агрегата:
- Конструкция этой коробки передач очень надежна. В основе его остается механика, проверенная временем и изученная.Вместе с тем по надежности он превосходит вариатор и автомат.
- Считается, что использование роботизированной коробки передач способствует экономии топлива. Такая экономия может достигать 30 процентов.
- Роботизированная коробка требует использования меньшего количества масла, достаточно 2-3 литров, в то время как вариатору требуется около 7 литров. Все это приводит к большей экономии.
- Количество передач соответствует количеству механической коробки передач.
- В основе роботизированной коробки переключения передач та же механика.Это дает дополнительную возможность бесплатного I. простого ремонта, который может произвести практически любой автомобильный замок. Поэтому с ремонтом проблем не возникнет, по крайней мере, большинство распространенных поломок можно быстро и качественно устранить в обычной автомастерской.
- Ресурс увеличивается почти на 40 процентов, если сравнивать с механикой. Это очень существенная разница. И дело не только в экономии, но и в повышенной безопасности.
- В условиях города, когда есть постоянные пробки и на крутых подъемах будет вполне функционировать механическая коробка передач, которая присутствует в коробке робота.Эта особенность позволяет вспомнить обычную механику, по которой многие автовладельцы скучают.
У данного типа коробки передач есть не только достоинства, но и недостатки. К ним относятся:
- Главный недостаток Многие автовладельцы считают невозможность перепрограммирования агрегата, с целью увеличения динамики или экономии ресурсов. Это также не позволяет настроить коробку передач под свой стиль езды. Его следует привыкнуть к манере работы определенного дизайна, чтобы использовать его с удобством.Но русские мастера находят выход из любой ситуации. По истечении гарантийного срока авто просто меняют прошивку в электронном блоке управления.
- Скорость переключения передач робота немного снижена, реакция медленная. Это связано с некоторыми затратами на программирование, как и в любой машине.
- При поездках по городу, в условиях пробок и неровностей необходимо переключиться на ручное управление. В противном случае происходит быстрый износ, а срок эксплуатации роботизированной коробки передач значительно сокращается.
- В некоторых случаях при переключении передач можно почувствовать рывки. Объясняется это тем, что газ не сбрасывается до точки переключения. Устранить эту неприятность можно, если нажать педаль газа не до конца.
- Часто размывается сцепление на горке — это объясняется его перегревом. Поэтому для лифтов также лучше использовать ручной режим переключения.
Видео: Как ездить на роботизированной коробке передач.
Перед тем, как купить машину с ящиком-роботом, стоит собрать как можно больше информации о работе конкретной модели.Некоторые из них имеют постоянные, ставшие уже нормой «глюки». Например, «задумчивость» некоторых роботов составляет около 2 секунд. То есть переключение передач происходит с определенной задержкой.
К проблемам можно отнести и чрезмерную индивидуальность агрегатов. Даже одни и те же роботизированные коробки передач могут существенно отличаться. Такие серьезные отличия «Treaten», как правило, путем перепрошивки. И не стоит надеяться, что все пройдет само, лучше сразу обратиться к специалисту.
Но не все так тупо. Например, согласно отзывам о роботизированной трансмиссии Лада-грант, более половины владельцев этого автомобиля довольны этим управлением. Учитывая, что машина экономичнее и быстрее.
Видео: На АвтоВАЗе запущено производство Lada GRANTA с роботизированной КПП (АМТ).
На современных автомобилях используется несколько типов коробок передач — механическая, автоматическая, вариаторная. Ручная коробка отличается надежностью, но требует от водителя водительских навыков.Автомат намного проще в управлении, но более «капризный» в техническом плане. Недавно конструкторы выпустили еще один вид КПП — роботизированный. В нем постарались совместить надежность «механики» с удобством «пулемета». И они их получили — все больше автопроизводителей оснащают свои машины роботизированной коробкой передач.
Немного об устройстве
Суть такой коробки довольно проста — есть механическая КПП и электронный блок ее управления.В РЦПП все функции, которые должен был выполнять водитель с ручной коробкой (раскрытие сцепления, перевод коробки коробки в нужное положение), выполняют исполнительные механизмы — сервоприводы электронного блока.
За счет этого повысилась надежность КПП за счет использования классической «механики» и увеличилось ее удобство. Водителю нужно только перевести селектор в нужное положение (как в АКПП) и получать удовольствие от езды, а электронный блок позаботится о том, чтобы переключение передач было выполнено.
При этом многие роботизированные боксы оснащены еще и ручным управлением, что позволяет управлять водителем за коробкой самостоятельно, с той лишь разницей, что нет необходимости выжимать сцепление.
Особенности управления
Некоторые режимы работы RCPP получены от, а именно:
- «Н» — нейтраль. Режим, в котором крутящий момент на колеса от КПП не передается. То есть двигатель работает, вращение передается на коробку, но из-за положения шестерен на колесах не передается.Используется при длительной парковке Авто, перед запуском, после остановки;
- «Р» — движение реверсом. Здесь все просто, водитель переводит селектор в это положение и машина движется назад.
Остальные режимы роботизированной коробки имеют собственное обозначение:
- «А / м» или «Э / М» — двигаться вперед. Этот режим соответствует режиму «D» автоматической коробки, то есть машина движется вперед, а коробка передач переключается. В режиме «М» осуществляется ручное управление. Перевод селектора в конкретную канавку выбирается необходимый режим;
- «+», «-» — переключатель передач.Кратковременные переводы селектора в сторону «+» или «-» обеспечивают переключение коробки передач при ручном режиме управления «М».
Нагревает ящик?
Вроде все просто, и в управлении такой коробкой нет ничего сложного — достаточно перевести селектор в нужное положение, и начать движение. И еще вы должны знать, как управлять ящиком-роботом, чтобы он работал без проблем.
Начнем с интересного вопроса С. — Нужно ли зимой прогревать коробку передач перед началом движения? Для автоматической коробки зимой Утепление обязательно и выполняется кратковременным переводом селектора на все положения.
Роботизированный бокс, по сути, механический и не требует прогрева. И все же зимой перед началом движения РЦНП следует прогреть, хотя это не совсем обогрев. Во время стоянки масло в коробке стекает и из-за мороза густеет. Поэтому рекомендуется зимой после запуска двигателя дать время, чтобы масло не напилось, а просто растеклось по элементам коробки, уменьшив трение между ними. Достаточно просто постоять пару минут с моторикой головой, пока селектор переводить в разные режимы Не нужно держать его в положении «N».После этого движение следует начать плавно, без резких рывков и проехать так не менее 1 км, что обеспечит полный прогрев масла.
Начало движения на подъем, его преодоление, спуск
Многие автомобили с RCPP не оснащены системой помощи при запуске, поэтому необходимо научиться обращаться к самому водителю. Начиная подъем с роботизированным ящиком, нужно действовать как с «механикой». Для начала движения селектор переводится в режим «А», педаль акселератора плавно нажимается и при этом автомобиль снимается с ручного тормоза.Такое действие исключит автоматический откат. При этом нужно практиковать жать на газ и стрелять с ручного тормоза, чтобы водитель почувствовал двигатель и понял, когда рукоятка начала включаться и может быть снята с ручного тормоза.
В начале движения на подъем зимой лучше использовать ручной режим, при этом выставляя первую передачу. Не стоит сильно люфтить, чтобы не было пробуксовки колес.
При переходе в набор высоты, с выбранным автоматическим режимом, коробка будет запускать самостоятельно сокращенные трансляции, что вполне логично, ведь с повышенными оборотами преодолевать подъем легче.Такая коробка передач оснащена гироскопом, определяющим положение автомобиля, и если датчик покажет подъем, то и коробка будет работать соответственно. Вы можете совершать движение в ручном режиме, фиксируя определенную передачу. Важно понимать, что РЦНП не будет двигаться в натяжении, поэтому при поднятом двигателе должно быть не менее 2500 об / мин.
При спуске никаких действий со стороны водителя не требуется. Достаточно перевести селектор в положение «А» и снять ручник.При этом автомобиль будет производить торможение мотором.
Остановка, Парковка
И третий важный вопрос — правильность парковки и остановки. После полной остановки автомобиля селектор необходимо перевести в нейтральное положение «N», поставить на ручной тормоз и после заглушить двигатель. При кратковременных остановках переход селектора в нейтраль необязателен, вполне возможно остаться на режиме «А». Но следует учитывать, что при остановке сцепление остается выжатым.Поэтому в пробке или на светофоре, когда остановка задерживается по времени, все равно ехать на нейтраль.
Другие режимы
Это основные правила, как управлять роботизированной коробкой. Но есть и другие особенности, например, у некоторых RCPP есть расширенные режимы — спорт и зима, так называемая «снежинка».
«Снежинка» нацелена на то, чтобы как можно больше закурить и без скольжения начать движение по обледенелой дороге. Все, что она делает, это обеспечивает начало движения сразу со второй передачи и более плавные переходы к повышенным передачам.
РежимSport обеспечивает повышенные передачи при больших поворотах, чем в обычном режиме. Это позволяет быстро разогнаться. То есть, если в обычном режиме переход на 2 передачи осуществлялся, например, при 2500 об / мин, то в спортивном режиме этот переход будет осуществляться при 3000 об / мин.
Теперь о возможности перехода из автоматического режима в ручной и обратно во время движения. Роботизированный ящик без проблем позволяет это сделать. Также допускается самостоятельно уменьшать или увеличивать передачу для изменения скорости движения.Но следует учитывать, что электронный блок не передаст коробку полностью, он будет постоянно контролировать работу.
Следовательно, если водитель решит перейти, например, на две программы вниз, то электронный блок даст это сделать, но при этом он контролирует обороты двигателя и, если они не соответствуют выбранной трансмиссии, то электроника самостоятельно перейдет на разрешенную передачу — так называемую «защиту от дурака».
Здесь все просто — электронный блок запрограммирован так, что каждой трансмиссии соответствует определенная частота вращения двигателя.И если выбранная вручную трансмиссия совпадает с ее диапазоном, коробка переключится, а если нет — включит нужную скорость.
Такая коробка «не терпит» резких нажатий на педаль газа, поэтому лучше двигаться в спокойном режиме. Даже при необходимости разогнаться — лучше на акселератор повредить плавно, при этом стоит перейти в ручной режим. А при торможении следует обратное — перейти в автоматический режим.
Особенностью RCP является наличие небольших толчков при переключении передач.От них можно избавиться достаточно просто — при переключении передач сбросить обороты двигателя, то есть действовать по аналогии с обычной ручной коробкой.
Наличие ручного режима Позволяет выполнить выезд «Русташ» в случае, если машина застряла в сугробе. Но в то же время, это не будет рекомендовано в пользу PPC, так как не рекомендуется взламывать RCP, это может привести к декалибровке исполнительных механизмов. Поэтому застрявшую машину все же лучше извлечь с привлечением сторонней помощи.
Обязательно выполняйте инициализацию при любой инициализации и диагностируйте состояние RCPP, которое будет устранено еще на ранней стадии.
Есть и другие мелкие особенности таких коробок, которые зависят от производителя. Их лучше сразу спросить, чтобы в дальнейшем не было недоразумений с эксплуатацией роботизированного бокса.
В мире существует несколько автомобильных трансмиссий. Наиболее популярны механическая коробка передач и автомат. На данный момент многие популярные производители начали использовать роботизированную версию в своих новинках.В статье рассмотрим, что это такое — робот-редуктор, какие отзывы он получает и есть ли достоинства и недостатки.
Коробки с характеристиками
Робот-редуктор, по сути, механический, он просто в него встроен. автоматическое сцепление и переключение передач. Соответственно, работа трансмиссии полностью зависит не от водителя, как в других версиях, а от блока электронного управления. Водителю остается только правильно передать поступающую информацию для корректной работы трансмиссии.
Устройство
Какая коробка передач лучше, автомат или робот, мы рассмотрим чуть позже, для начала нам необходимо знать устройство нового изобретения. Автоматическая коробка передач получила сцепление фрикционного типа. Таков пакет дисков, Ъ или встроенный отдельный механизм. Самой надежной и прочной можно назвать конструкцию, получившую двойной захват. Фольксваген Гольф. Стал первым в мире автомобилем, который был оснащен роботизированной коробкой передач. Отзывы о работе устройства были довольно хорошими, все отметили хорошую реакцию электроники, а также идеальный функционал при разгоне.В этом случае поток мощности не прервался. Это достигается за счет использования двойного сцепления. В этом случае переключение скорости занимает не более 1 секунды. При работе на российских дорогах, к сожалению, срок службы аналогичной коробки передач сокращается минимум вдвое.
Характеристики
Привод сцепления может быть электрическим, гидравлическим. В первом случае следует отметить наличие электродвигателя и механической трансмиссии. Второй тип привода работает за счет работы специальных цилиндров, которые управляются клапаном электромагнитного типа.В некоторых случаях коробка передач представляет собой робот, вариатор которого хорошо скомпонован, оснащен электродвигателем. Он перемещает цилиндры, а также предназначен для поддержания работы гидромеханического блока. Аналогичное устройство, имеющее привод такого типа, отличается длительностью переключения передач. Как правило, он варьируется от 0,3 до 0,5 секунды. Однако если сравнивать с гидравлическими аналогами, то в системе не нужно будет постоянно поддерживать определенное давление. Яркий пример. Таким автомобилем является «Опель», коробка передач робота на этой машине в целом радует многих водителей.
Гидравлические редукторы получили быстрый цикл, обеспечивающий переключение передач за время от 0,05 до 0,06 секунды. Именно поэтому чаще всего такую трансмиссию применяют на гоночных машинах и суперкарах. Примерами служат Ferrari и Lamborghini. На машинах, относящихся к бюджетному классу, эту трансмиссию нельзя поставить на сотку даже в качестве дополнительной опции.
Как работает робот CPP?
Большинство механизмов регулируются специальными интеллектуальными блоками трансмиссии робота.Что это? Благодаря этому, то есть работе электронной системы, вы можете отслеживать все необходимые параметры коробки передач. Также датчики анализируют положение трансмиссии, давление масла и другие параметры для передачи в основной блок. После этого электроника сформирует все необходимые действия для выполнения. В виде коротких сигналов они будут входить в электропривод и электрохлопать соответственно, это позволит быстро, но плавно переключать коробку передач.
Режимы работы
Конструкция автомата вариатора и коробки передач робота для многих остается непонятной.Это устройство работает по принципам механики. Однако при желании пользователя его можно переключить на автоматизацию. После того, как человек перейдет в соответствующий режим, электронный блок будет заблокирован. Последний сам проанализирует алгоритм работы. Водителю нужно только нажать на педаль газа и следить за тем, что происходит на дороге. Довольно часто в пробках, судя по отзывам, робот-редуктор становится незаменимым. Если режим ручной, то водителю будет разрешено самостоятельно переключать передачи с пониженной на повышенную и наоборот.Управление может осуществляться с помощью обычного рычага коробки передач.
Актуальность коробки передач в России
К сожалению, отечественные производители практически не используют роботизированные коробки передач для создания автомобилей. Что это такое, многие водители не знают. Однако в 2015 году было заявлено, что автомобили от ВАЗа, относящиеся к серии Priora, будут оснащаться роботом. Такой ящик весит около 35 кг, и он полностью адаптирован под российские дороги и погоду. Например, если старый ящик Пулемет не давал возможности запустить машину при температуре ниже 25 градусов, то робот может показать хорошую работу, даже если эта отметка опустится до -40.Гарантийный срок Роботизированный бокс составляет 3 года, однако производитель заявил, что средний срок эксплуатации составляет 10 лет. Таким образом компания хотела вернуть популярность станкам серии PRIORA.
Преимущества
Отзывы Коробка передач Робот заслуживает очень хорошего. Рассмотрим его основные достоинства. Многие заявляют, что удобно, когда коробка передач имеет все достоинства станка и механики. Соответственно, человек, работающий с машиной, может получить впечатления от АКПП.Но при этом не стоит переживать из-за того, что расходуется слишком много топлива.
Главное преимущество такой коробки передач — экономичность. Как говорят пользователи, в конструкцию попало программное обеспечение, которое рационально определяет крутящий момент. А если сравнивать с обычным человеком, электроника не нервничает, не устает, не впадает в депрессию, физические нагрузки на это не влияют. Именно поэтому на мировом рынке роботизированная коробка передач получила большое распространение.
На данный момент такая трансмиссия комплектуется в автомобилях классов A, B, C.Стоит отметить, что «Тойота Королла» также получила трансмиссию робота. Пока что это устройство устанавливалось на немецкий автомобиль Volkswagen Amarok. Причем в такой комплектации этого «немца» можно купить как на российском, так и на европейском рынке.
Впрочем, это далеко не полный перечень преимуществ, их еще несколько. Судя по отзывам, эта трансмиссия отличается высокой надежностью. Замена механизмов потребуется только после ввода в эксплуатацию 250 тыс. Км. Часто ремонту подлежит сцепление, которое плохо переносит большие нагрузки, особенно если речь идет о катании на сложных участках.Стоимость роботизированного бокса намного меньше стандартного автомата. Причем очень неприхотлив в обслуживании коробки передач робота. Масло — единственное, что нужно менять каждые 60 тысяч км пробега.
Весовые характеристики
Вес коробки — довольно важный вопрос. По этому параметру трансмиссия показывает себя лучше, чем автомат, так как она намного проще. Снаряженная масса такого бокса для легковых автомобилей будет не более 50 кг, при этом вес машины только начинается с этой отметки и в максимальных положениях достигает 100 кг.Соответственно и автомобилю будет легче с роботом, то есть амортизаторы, колеса и двигатель не будут испытывать сильной нагрузки.
недостатки
Что такое коробчатый автоматический робот, мы уже рассмотрели, также обсудили преимущества станка, работающего на таком устройстве. Однако у него есть и недостатки. Узнай что. Например, главный минус — это скорость переключения передач. Из-за этого на машину можно оказывать сильное давление, особенно если человек стоит в пробке.Часто машина разгоняется рывками, что больше подходит для спортивной езды. Именно поэтому для всех любителей спокойной езды производители такой коробки передач установили специальный режим. И если вы справитесь с этой проблемой, то безопасность движения по спускам на такой машине — вопрос довольно актуальный.
Роботизированная коробка не получает постоянных сигналов от двигателя. Именно поэтому часто может выключиться, соответственно машина будет скатываться со склона. Но, к счастью, судя по отзывам, в такую ситуацию мало кто попал.В целом, учитывая все отрицательные стороны, эту коробку В любом случае можно назвать одной из лучших.
Принципы робототехники
Слово робот происходит от Чешское слово для принудительного труда или крепостного. Было введено драматурга Карела Чапека, чей вымышленный робот изобретения были созданы химическими и биологическими, методы, а не механические. В основном роботы состоит из:
Механическая конструкция , например как колесная платформа, рука или другая конструкция, способен взаимодействовать с окружающей средой.
Датчики для определения окружающей среде и дать устройству полезную обратную связь.
Системы для обработки сенсорных ввод в контексте текущей ситуации и дать указание устройству выполнить ответные действия к ситуации.
Механическая конструкция
Конструкция робота состоит в основном из корпус робота, включающий руки и колеса.Некоторая сила например, для изготовления ручек и колес требуется электричество. повернуть по команде. Один из самых интересных аспектов робота в целом — это его поведение, которое требует форма интеллекта.
Двигатели
Разнообразные электродвигатели обеспечивают мощность для роботов, заставляя их двигаться с различными запрограммированные движения. Рейтинг КПД двигателя описывает, сколько электроэнергии потребляется превращается в механическую энергию.
Двигатели постоянного тока. Постоянный магнит постоянного тока для двигателей требуется только два провода, и используется расположение фиксированные и электромагниты (статор и ротор) и переключатели. Они образуют коммутатор для создания движения. через вращающееся магнитное поле.
Двигатели переменного тока. Эти двигатели циклируют мощность на входных выводах, чтобы непрерывно перемещать поле.
Двигатели шаговые. Они похожи на бесщеточный двигатель постоянного или переменного тока. Они перемещают ротор на подачи питания на разные магниты в двигателе в последовательность (пошаговая). Шаговые двигатели предназначены для точный контроль и не только вращается по команде, но и может вращение с любым количеством шагов в секунду (до их максимальная скорость).
Серводвигатели. Сервоприводы простые DC двигатели с редуктором и системой управления с обратной связью. Они настраиваются, пока они не совпадут с сигналом. Сервоприводы используются в радиоуправляемых самолетах и автомобилях.
Подробнее о двигателях
Механизмы
Шестерни и цепи . Шестерни и цепи — это механические детали, обеспечивающие механизм для передачи вращательного движения из одного места в другое с возможно, изменить его по ходу дела.Изменение скорости между двумя шестернями зависит от количества зубьев на каждая передача.
Шкивы и ремни. Шкивы и ремни, две другие простые машины используются в роботах, работают так же, как шестерни и цепи. Шкивы — это колеса с канавкой по краю, и Ремни — это резиновые петли, которые входят в эту канавку.
Коробки передач . Коробка передач работает по тем же принципам, что и шестерня и цепь, без цепи. Примеры коробки передач находятся на трансмиссии в автомобиле и подача бумаги принтера.
Датчики
Роботы работают по основному измерения, требующие различных типов датчиков.А чувство времени обычно встроено через перцептивное восприятие. аппаратное и программное обеспечение, которое быстро обновляется. Датчики взаимодействуют с внешней средой и преобразует энергию, связанную с тем, что есть измеряется (звук, свет, давление, температура и т. д.) в другую форму энергии. Общие датчики, используемые в робототехника включает датчики света, сенсорные датчики, датчики звука и датчик ускорения.
А звуковой датчик установлен в месте уха робот для обнаружения голоса объекта.An датчик ускорения установлен в кузове для обнаружить тряску. Датчик касания установлен в лоб робота для обнаружения касания
Блок питания
Как правило, питание осуществляется от два типа источников: батареи, которые используются только один раз а затем выбросили; и аккумуляторные батареи, которые работают за счет обратимой химической реакции и могут быть перезаряжался тысячу раз.Первое использование аккумулятор обеспечивает до 4 часов непрерывной работы работа в приложении.
Система управления
Есть две основные системы управления роботы: логическая схема и микроконтроллер.
Логическая схема
Цифровая логическая схема управляет механическая система.Цепь обычно подключается к механическая структура через мостовое реле . А управляющий сигнал создает магнитное поле в реле катушка, которая механически замыкает переключатель. транзисторы, для Например, хорошие кремниевые переключатели, доступные во многих технологии управления механическими системами.
Микроконтроллер
Микроконтроллеры умны электронные устройства, которые используются внутри роботов.Они выполнять функции, аналогичные тем, которые выполняет микропроцессор (CPU) внутри персонального компьютера. Микроконтроллеры медленнее и имеют меньше памяти, чем ЦП, но предназначены для решения реальных проблем управления. Одно из основных различий между процессорами и микроконтроллеры — это количество внешних компонентов нужно было управлять ими. Микроконтроллеры могут работать без внешние части, и обычно требуется только внешний кристалл или генератор.
Есть три основных характеристики микроконтроллер на рассмотрение: скорость, размер и объем памяти. Скорость обозначается в тактовых циклах, а обычно измеряется в миллионах циклов в секунду (Мегагерцы, МГц). Размер указывает количество биты информации, которые микроконтроллер может обрабатывать в один шаг (например, 4-, 8-, 16- и 32-битные). Микроконтроллеры насчитывают большую часть своей постоянной памяти (ПЗУ) в тысячах байтов (kB) и r и память доступа (ОЗУ) в одиночных байтах.
Подключение к математике
Конфигурация робота
Проектирование и разработка компактного высокомоментного роботизированного привода для космических механизмов | J. Механизмы Робототехника
Космическим роботам требуются компактные системы шарнирного привода (JDS), обычно состоящие из привода, трансмиссии, шарнирных элементов, которые могут передавать высокие крутящие моменты через жесткие механические порты.Сегодняшние традиционные космические приводные системы состоят из стандартных приводов и многоступенчатых трансмиссий, которые обычно включают от трех до шести ступеней. Эта текущая практика имеет определенные преимущества, такие как короткое время разработки из-за доступности механических компонентов. Однако ему не хватает интеграции на системном уровне, которая учитывает структуру привода, размер и выходное усилие, структуру трансмиссии, передаточное число и прочность, и часто приводит к длинным и громоздким узлам с большим количеством деталей.В этой статье представлено новое аппаратное обеспечение робота, которое объединяет JDS робота в одно компактное устройство, оптимизированное для его размера и максимальной плотности крутящего момента. Это достигается путем разработки роботизированного соединения с использованием специальной трансмиссии, которая при численной оптимизации может создавать неограниченные передаточные числа, используя только две ступени. Конструкция компьютеризирована, чтобы получить все решения, которые удовлетворяют его кинематическим отношениям в пределах заданного диаметра привода. По сравнению с существующими роботизированными приводами предлагаемая конструкция может привести к созданию более коротких сборок со значительно меньшим количеством деталей при том же выходном крутящем моменте.Теоретические результаты демонстрируют потенциал примера устройства, для которого был изготовлен доказательный пластиковый макет, который может обеспечить крутящий момент более 200 Н · м в корпусе размером с локтевой сустав человека. Предлагаемая технология может иметь серьезные технологические последствия в других отраслях, таких как механическое протезирование и реабилитационное оборудование.
Для многих роботизированных приложений требуются компактные системы шарнирных приводов (JDS), которые могут создавать высокие крутящие моменты на низких скоростях для таких приложений, как космические роботы.Обычные системы привода разрабатываются путем последовательного соединения привода с какой-либо трансмиссией с высоким передаточным числом, такой как электродвигатель с гармоническим приводом (HD) или планетарная зубчатая передача (PGT). Несмотря на свою популярность, этот подход часто приводит к созданию длинных и громоздких сборок, которые увеличивают размер и сложность робота и уменьшают его рабочее пространство и размер укладки [1]. Кроме того, обычные компактные трансмиссии с высоким передаточным числом, такие как гармонические приводы, имеют высокое трение и низкую жесткость, что ограничивает их способность работать как чисто усилители крутящего момента в отсутствие схем нелинейного управления крутящим моментом [2].
В качестве альтернативы, обычные планетарные и обычные зубчатые передачи требуют наличия нескольких ступеней для достижения высоких передаточных чисел и могут привести к созданию длинных и громоздких узлов для приложений с высоким крутящим моментом. Другие типы роботизированных приводных систем основаны на интеллектуальных материалах, таких как пьезоэлектрик, сплавы с памятью формы, магнитореологические и электроактивно-полимерные приводы. Они имели ограниченный успех в разработке полнофункциональных роботизированных приводных систем, либо все еще находятся на ранних стадиях практического внедрения, либо не достигли окончательных результатов.Следовательно, разработка компактных и эффективных систем привода может улучшить производительность многих роботизированных систем и систем управления движением, особенно мобильных приложений с жесткими требованиями к крутящему моменту и размеру. Такие улучшения в технологии приводных систем могут также позволить рождение новых продуктов, таких как легкие протезы, которые невозможны с существующими двигателями и системами трансмиссии [3]. До настоящего времени портативные энергетические системы для переобучения голеностопного сустава имели ограниченную коммерциализацию за пределами специализированных больниц и реабилитационных клиник, главным образом из-за отсутствия адекватных готовых актуаторных технологий [4].Чтобы облегчить развитие этих устройств в более удобные для пользователя системы, следует разработать новые формы приведения в действие с такими ключевыми возможностями, как высокий выходной крутящий момент / усилие, легкий, ненавязчивый и энергоэффективный.
Робот JDS соединяет и приводит в движение два звена робота относительно друг друга (см. Рис. 1). Для выполнения своих функций JDS должен содержать (1) привод для подачи силы или крутящего момента, (2) трансмиссию для усиления силы привода и, наконец, (3) конструкцию шарнира, которая ограничивает подвижность звеньев до одного градуса. -свободы при несении нагрузок в остальных степенях свободы.
Независимо от размера и веса, динамика JDS в основном определяется характеристиками привода / трансмиссии, такими как передаточное число, жесткость трансмиссии, инерция, трение и люфт. Эти свойства играют ключевую роль в работе робота, а также в разработке его системы управления. Например, передача с низкой жесткостью уменьшает полосу пропускания сил системы привода и вносит нестабильность в контуры обратной связи с высоким коэффициентом усиления [5].Кроме того, трение трансмиссии повышает требования к пусковому крутящему моменту привода, увеличивает его размер и снижает точность. В случае ограничений трансмиссии, таких как нелинейное трение и / или жесткость, используются нелинейные регуляторы для улучшения отношения входного / выходного крутящего момента трансмиссии [6].
В течение последних четырех десятилетий значительное количество исследований было посвящено разработке и пониманию компактных трансмиссий с высоким передаточным числом, таких как гармонические передачи.Гармонические приводы в первую очередь полезны для разработки компактных приводных систем с высоким крутящим моментом [7]. Несмотря на их популярность, два основных эксплуатационных недостатка гармонических приводов — это высокое трение и низкая жесткость. Трение восходит к основному принципу работы гармонического привода, который основан на трении скользящих зубцов между его гибкой линией и круговой шлицей. Еще один источник трения в гармоническом приводе — это высокая радиальная предварительная нагрузка генератора волн. Трение в гармонических двигателях широко изучается многими исследователями, например, в работах [1,95].[8] и [9], и хорошо известно, что он демонстрирует нелинейное поведение в результате действия скользящих зубцов. Кроме того, работа передачи гармонического привода основана на непрерывной деформации ее основного компонента, гибкой линии. Эта гибкость создает путь нагрузки с низкой жесткостью, который уменьшает рабочую полосу пропускания робота, вызывает резонанс и создает эффект люфта [9,10]. В результате гармонические приводы не работают как чистые усилители крутящего момента [11,12], так что их отклик скорости разомкнутого контура не только загрязнен вибрациями, но и непредсказуемыми скачками скорости после резонансных областей [9].Наконец, гармонические приводы ограничены передаточными числами ниже 1: 320 [13] по конструкции и неэффективны в низкотемпературных средах, таких как космос [14].
Другими широко используемыми передачами в роботизированных механизмах являются PGT, такие как в Refs. [15–17]. Европейский роботизированный манипулятор использует четырехступенчатый планетарный редуктор с передаточным числом 450: 1 на его шарнирах [16]. Чтобы уменьшить количество деталей и сложность сборки, коронные шестерни разделены между первой и последней двумя ступенями.Точно так же в системе привода марсохода [17] используются трансмиссии, состоящие из трех-пяти ступеней с передаточными числами от 1528: 1 до более 5000: 1. Потребность в повышенном понижении передачи важна во многих космических приложениях, поскольку они приводятся в движение с высоким крутящим моментом и низкой скоростью. Следовательно, реализация PGT в космических механизмах часто включает многоступенчатые зубчатые передачи, которые охватывают большое количество частей, таких как водила планетарной передачи, подшипники водила и отдельные подшипники планетарной передачи, что не только увеличивает сложность, но и снижает надежность таких механизмов.
Другое недавнее исследование роботизированных приводных систем касалось проблемы оптимизации соединения двигатель / трансмиссия для его наибольшего крутящего момента на инерцию в предположении, что высокие передаточные числа добавляют массу, инерцию и потери на трение [18]. Его результаты показывают, что самый большой двигатель и наименьшая трансмиссия в пределах размера соединения являются оптимальными. Однако этот подход не рассматривает приложения, требующие высоких крутящих моментов при ограниченной допустимой силе тока, такие как космические роботы.
Другими типами компактных трансмиссий в литературе по робототехнике и управлению движением являются циклоидальные редукторы [19,20] или гибридные комбинации планетарных и циклоидальных передач, известные как редукторы RV. Анализ этих механизмов показал, что, хотя они имеют более высокий КПД по сравнению с гармоническими приводами, они страдают от значительного люфта и больших ошибок передачи [21]. Кроме того, кажется, что в литературе есть пробел, касающийся максимально допустимых передаточных чисел циклоидальных приводов по отношению к их максимальному выходному крутящему моменту.
Таким образом, большинство приводных систем, разработанных на сегодняшний день, основаны на коммерческих двигателях, соединенных с редукторными трансмиссиями того или иного типа [22–24], и им не хватает интеграции на системном уровне для двигателя, трансмиссии и совместной конструкции.
В следующей статье рассматривается интеграция конструкции и оптимизация роботизированной системы привода с учетом конструкции двигателя и выходного крутящего момента, конструкции и прочности трансмиссии, передаточного числа, опоры выходного подшипника и конструкции сустава робота.Мы также предлагаем новую дифференциальную планетарную трансмиссию, которая при должной оптимизации способна обеспечивать практически любое передаточное число и которая, согласно обширным исследованиям авторов, никогда не изучалась в контексте разработки роботизированных шарниров. Однако трансмиссии с дифференциальным приводом были первоначально разработаны для автомобильной промышленности для распределения крутящего момента двигателя [25].
Ссылаясь на ранее связанную работу в Refs.[26] и [27], в этой статье рассматривается подробный проект механизма срабатывания JDS и представлена численная оптимизационная модель для его узла двигатель / трансмиссия. Кроме того, изучаются два тематических исследования, показывающих сравнение с обычным гармоническим приводом и планетарной трансмиссией. По сравнению с космическими приводными системами, которые были опубликованы в литературе, например, в статьях. [27–29], предлагаемая конструкция не только компактна, но и более универсальна благодаря инновационной конструкции трансмиссии, которая может обеспечивать любое передаточное число от 1: 1 до 5000: 1 с использованием только двух ступеней и стандартных диаметральных шагов.Кроме того, предлагаемый JDS является самоблокирующимся из-за высокого передаточного числа и, как таковой, не требует фиксирующего тормоза двигателя при больших передаточных числах, как в Ref. [27] для сохранения положения нагрузки в случае внезапной потери мощности.
Трансмиссия JDS представляет собой двухступенчатый планетарный редуктор, схематически изображенный на рис. 2. Входом в этот механизм является солнечная шестерня ( N 2 ), а выходом — коронная шестерня ( N 5 ).Механизм крепится к земле с помощью зубчатого венца первой ступени ( N 1 ). Две планеты ( N 4 , N 6 ) с обеих стадий жестко связаны и, как таковые, ведут себя как одно твердое тело.
Трансмиссия приводится в движение двигателем с внешним ротором, встроенным в ее солнечную шестерню, как показано на рис. 3. Набор цилиндрических роликовых поверхностей удерживает радиальное положение планетарного ряда, что устраняет необходимость в водиле, планетах, двигателе и т. Д. и несущие подшипники.Симметрия земля-земля применяется для уравновешивания внутренних моментов рыскания, которые в противном случае действовали бы на планеты из-за пары моментов земля-выход.
Ключ к преимуществу этой концепции в высоком крутящем моменте описан на схемах свободного тела планетарно-планетарной муфты ( N 4 , N 6 ), показанных на рис. 4. Шестерни представлены своими шаговые диаметры (PD) для простоты, где D 1 , D 2 , D 4 , D 5 и D 6 обозначают шаговые диаметры заземленная коронная шестерня, солнечная шестерня первой ступени, планетарная передача первой ступени, кольцевая шестерня второй ступени и планетарная шестерня второй ступени, соответственно, и T в и T из — это входной и выходной крутящие моменты механизма.
В состоянии равновесия сумма моментов, действующих вокруг мгновенной оси вращения, дает преимущество крутящего момента механизма какTout = 2D4D5D2 (D4-D6) Tin
(1)Уравнение (1) показывает, что выходной крутящий момент обратно пропорционален разности диаметров шага планет ( D 4 — D 6 ), так что передаточное число в основном определяется шестернями планет и довольно независимо от размера трансмиссии.Это связано с тем, что входная сила двигателя действует на моментный рычаг D 4 , тогда как выходная сила действует на гораздо меньший моментный рычаг, эквивалентный (D 4 — D 6 ) / 2 . В результате этого отношения можно регулировать диаметры шага планет, чтобы получить очень высокие передаточные числа без необходимости добавления дополнительных ступеней. Количество зубьев шестерни, соответствующее таким высоким передаточным числам, обосновано более подробно в гл.2.2 численными методами. Кроме того, как было показано в [5]. [30], что передаточное число привода значительно влияет на величину и распределение кинетической энергии внутри роботов-манипуляторов и может улучшить их пространственную точность за счет уменьшения воздействия их сил инерции. Это еще раз подтверждает важность разработки роботизированных соединений, способных создавать большие диапазоны передаточных чисел по своей конструкции.
Другой ключевой характеристикой этой концепции является использование структурной симметрии для уравновешивания внутренних нагрузок внутри трансмиссии, что в противном случае потребовало бы дополнительных несущих опор и компонентов.Схема свободного тела, показанная на рис. 4, показывает, что силы, действующие на сборку планет, лежат в двух разных плоскостях. Это создает момент рыскания, который имеет тенденцию искажать параллельность и перпендикулярность планет по отношению к их плоскости вращения.
Чтобы противодействовать этому моменту рыскания, выходной каскад помещается между двумя симметричными наземными каскадами таким образом, чтобы выходные планеты находились в состоянии равновесия нагрузки двойного сдвига, как показано на рис.5.
Кроме того, эта новая конфигурация позволяет жестко закрепить выход между двумя наземными конструкциями с помощью дуплексных подшипниковых узлов (например, спина к спине, тандем, лицом к лицу) для получения жесткого выхода JDS при всех типах нагрузок. Поперечно-осевые силы реакции грунта обеспечивают поддержку против осевых и радиальных нагрузок, как показано на рис. 6.
JDS соединяется с использованием компонентов двойного назначения, чтобы упростить его сборку и уменьшить количество деталей.Компоненты двойного назначения состоят из цилиндрических поверхностей роликов, прилегающих к компонентам зубчатой передачи. Эти поверхности размещают планетарный блок в радиальном направлении, тем самым устраняя необходимость в обычных водилах планетарной передачи и соответствующих подшипниках, а также сохраняя воздушный зазор между статором и ротором (см. Рис. 3). Поверхности роликов имеют диаметр качения, равный диаметру прилегающей шестерни, чтобы синхронизировать тягу шестерни и движение качения, как показано на рис. 7.
Кроме того, планетарный блок удерживается в осевом направлении за счет упора между плоской поверхностью роликов и коронками зубьев коронной шестерни.Это связано с тем, что диаметр планетарного ролика в радиальном направлении больше меньшего диаметра коронной шестерни. В этой конфигурации действие зубьев шестерни и функции опоры подшипника интегрированы друг с другом, что приводит к очень компактной конструкции JDS. Двигатель состоит из внешнего магнитного ротора и полой пластины статора. Ротор встроен в солнечную шестерню, а статор прикреплен к заземленному компоненту, как показано на рис. 3. В концепции воздушный зазор между статором и ротором поддерживается теми же поверхностями роликов, которые радиально устанавливают и выравнивают оставшиеся планетарный кластер.
Учитывая важность плотности крутящего момента (крутящий момент на вес) в системе совместного привода робота, было проведено исследование численной оптимизации аналитической модели для оценки плотности крутящего момента в диапазоне значений параметров шестерни. Традиционно проектирование шестерен — это итеративный процесс, однако в этой статье мы компьютеризируем конструкцию, решив все решения этой конструкции, которые находятся в пределах заданного выходного диаметра.Чтобы ограничить объем оптимизации, были сделаны следующие проектные допущения:
- (1)
Диаметр ротора двигателя почти равен диаметру отверстия солнечной шестерни или меньше его.
- (2)
Минимальное количество зубьев на сателлите планетарной передачи составляет 10 (или больше), чтобы избежать подрезания шестерни.
- (3)
Крутящий момент двигателя, усиленный передаточным числом, ниже, чем момент отказа трансмиссии.
- (4)
Стандартные диаметральные шаги варьируются от 10 до 96 зубьев / дюйм.
N2P1 + N4P1 = N5P2 − N6P2 = 2K
(3) где P 1 и P 2 — диаметральные шаги первой и второй ступеней соответственно, а N 4 и N 6 — количество зубьев планетарной шестерни. , с их значениями в диапазоне от 10 зубьев на шестерню до промежуточного произвольного значения (например,г., 30) с шагом 1 зуб. Кроме того, P 1 и P 2 должны иметь определенные значения шага, чтобы использовать стандартные зуборезы. Зная приблизительный диапазон значений для N 4 , N 6 , P 1 и P 2 , уравнение. (2) можно использовать для определения количества зубьев солнечной шестерни и выходного венца, обозначенного как N 2 и N 5 , какПараметры, показанные в таблице 1, использовались для заполнения переменных передачи по их возможным комбинациям для радиуса орбиты планет, увеличивающегося с 2 до 5 дюймов с шагом 0.1 дюйм. Допуская изменение радиуса рычага от 1 до 2 дюймов, параметры трансмиссии учитываются не только для разного количества зубьев, но и для физического диаметра трансмиссии.
Используя исчерпывающий поиск с помощью вычислений, в котором исключены конфигурации передачи, которые имеют нецелые значения для N 2 и N 5 , мы получили приблизительно 2,5 × 10 6 решений с отношениями, изменяющимися от -5000: 1 до +5000: 1.Для каждой из этих конфигураций передаточное число решается с использованием следующего уравнения:ToutTin = 1 + N1N21 − N1N6N4N5
(7) Поскольку геометрию зубьев можно извлечь из диаметральных шагов и количества зубьев, можно выполнить анализ прочности на каждой конфигурации передачи во время вычислительного цикла. Статический анализ сил показывает, что планеты являются самыми слабыми компонентами трансмиссии и поэтому ограничивают максимальный выходной крутящий момент JDS. В частности, механическая мощность передается по трем точкам сетки, как показано на рис.8.Линейные скорости (скорость прохождения зубьев) и передаточные силы в точках сетки задаются как
Используя скорости и силы по тангажу, можно получить динамические коэффициенты и соответствующие силы разрушения для всех возможных конфигураций трансмиссии.Для этого планетарные напряжения рассчитываются с использованием критериев рейтинга передач Американской ассоциации производителей зубчатых колес (AGMA), включающих геометрические, материальные, монтажные и надежные факторы, связанные с каждой передачей. Выходные силы, которые могут вызвать разрушение в трех точках сетки, рассчитываются с использованием контактных и изгибающих напряжений (см. AGMA 2001-DO4). Другие оставшиеся факторы, такие как перегрузка, монтаж, надежность и твердость поверхности, выбираются в соответствии с процессом изготовления / сборки.Наконец, вычислительный алгоритм возвращает матрицу, в которой каждая строка соответствует одной конфигурации этой конфигурации, а столбцы — ее соответствующие параметры. Репрезентативная выборка решений представлена в таблице 2.
Плотность крутящего момента JDS рассчитывается на основе крутящего момента при отказе и расчетного веса шестерен и двигателя. На рисунке 9 показано соотношение между передаточным числом и плотностью крутящего момента JDS.Каждая точка представляет одну конфигурацию JDS. Отрицательные отношения указывают на обратное направление между входными / выходными движениями трансмиссии.
Поскольку соотношение между передаточным числом и плотностью крутящего момента ограничивается способностью двигателя выдавать достаточный крутящий момент при определенном передаточном числе, решения JDS затем были отфильтрованы с использованием диаметра двигателя (взятого из диаметра отверстия солнечной шестерни) по требуемому двигателю. крутящий момент (крутящий момент отказа JDS в зависимости от передаточного числа).Этот процесс исключает конфигурации JDS с двигателями большего и меньшего размера и оставляет около 460 решений из возможных 2,5 × 10 6 . Эти конфигурации показаны на рис. 10. Классификация двигателей по размерам была оценена в соответствии с данными, предоставленными BEI KIMCO Magnetics, Inc (Сан-Диего, Калифорния). 2
После анализа данных одна комбинация приводов с максимально возможной плотностью крутящего момента с диаметром JDS, равным 4.5 дюймов было выбрано с учетом технологичности системы и использования стандартных компонентов подшипников. Эти характеристики перечислены в Таблице 3. Из Таблицы 3 очевидно, что только небольших различий в диаметрах шага планет (17,65 мм, 17,57 мм) достаточно для получения высокого передаточного числа (1: 900). Для соответствия этим спецификациям было разработано несколько концепций дизайна с использованием, по возможности, стандартных механических компонентов. В предварительной концепции, показанной на рис. 11, шестерня с меньшей шириной торца размещается на более длинном плече момента, чтобы уравновесить момент рыскания, как описано на рис.4.
Следует отметить, что в двух ступенях используются несколько разные нормальные диаметральные шаги, так что рабочие диаметры шага планетарных и коронных шестерен почти, но не в точности равны при высоких передаточных числах. Среднее передаточное число на один оборот на выходе постоянно, так как оно зависит от количества зубьев на шестернях. Точность изготовления влияет на мгновенную ошибку передаточного числа, обычно известную как кинематическая ошибка, которая отвечает за шум и вибрации в коробке передач, и выходит за рамки данной статьи.
Была установлена матрица проектирования между различными концепциями с учетом прочности конструкции и тепловыделения, производственных допусков и центровки блока планетарных шестерен. Конечный элемент прочности и термический анализ были выполнены на механизме, чтобы гарантировать производительность в соответствии со спецификациями, изложенными в таблице 3. Окончательная модель автоматизированного проектирования представлена на рисунке 12.Некоторые из основных проблем проектирования, с которыми сталкивается эта концепция, — это точность выравнивания «земля-земля» и рассеивание тепла двигателем. Результаты анализа методом конечных элементов (FEA) подтвердили аналитические прочностные и тепловые модели, а также подтвердили допустимый крутящий момент трансмиссии и теплоотдачу двигателя. Пластиковый макет был разработан с использованием технологии аддитивного производства, чтобы получить практическое представление о конструкции JDS, а инженерная модель показана на рис. 13. Макет успешно подтвердил передаточное число и предоставил практическую обратную связь по конструкции при эксплуатации и сборке механизма до его установки. разработка дорогостоящего металлического варианта системы.
В JDS используется конструкция с двойным заземлением, чтобы удерживать выходное звено через взаимно встречный подшипник. Таким образом, в конструкции используются два тонких угловых шарикоподшипника (толщиной 1/4 дюйма), которые находятся на расстоянии 1,35 дюйма друг от друга, чтобы эффективно выдерживать изгибающие моменты до 847,4 Н · м при статическом коэффициенте безопасности 1,
.Анализ напряжения скручивания был выполнен на центральном валу, который несет половину выходной нагрузки, эквивалентной 135.1 Н · м. Исследование показало максимальное напряжение сдвига 64 МПа в зависимости от геометрии вала (внешний диаметр = 0,9 дюйма, внутренний диаметр = 0,5 дюйма), что эквивалентно коэффициенту безопасности 3,1 для алюминия 6061. Соответствующие результаты FEA показаны на рис. 14. Благодаря конструкции с двойным сдвигом выходной крутящий момент равномерно распределяется между наземными ступенями, что приводит к низким напряжениям во всей удерживающей конструкции.
Другой анализ методом конечных элементов был разработан для оценки прочности шестерен планет, которые являются самыми слабыми компонентами трансмиссии, как показано на рис.15.
По результатам FEA наибольшие напряжения регистрируются в точках контакта и около корней зубьев шестерни. Максимальное расчетное напряжение составляет около 250 МПа. Это дает коэффициент безопасности 1,52 для легированной стали 4150, подвергнутой закалке и отпуску до RC 57-61.
Адаптация исполнительного механизма к плоской роботизированной руке изображена на рис.16. В дополнение к компактным размерам и большому выходному крутящему моменту, цельная конструкция привода поддерживает как одинарные, так и двойные срезные звенья на выходном и заземляющем элементах, соответственно. При установке на звено с двойным срезом жесткость соединения на кручение увеличивается, поскольку он действует параллельно центральному валу. Кроме того, вся электроника обратной связи и связи интегрирована и размещена в сборке JDS.
Конструкция манипулятора робота, показанная на рис.17 обладают как высокой полезной нагрузкой, так и очень компактным профилем, что позволяет стрелке исключительно хорошо работать в мобильных приложениях. Ключевой технологией, позволяющей использовать стрелу, является ее компактная исполнительная система, которая способна обеспечивать высокие крутящие моменты и обеспечивать жесткую конструкцию соединения, позволяя руке манипулировать тяжелыми грузами с ловкостью и точностью.
Универсальный характер предлагаемой конструкции облегчает разработку модульных систем с высокой полезной нагрузкой, которые можно реконфигурировать и адаптировать к текущей задаче.Все эти JDS могут иметь одинаковый компактный стандартный размер, но каждый, в зависимости от передаточного числа, может обеспечивать разную производительность. Этот подход может улучшить современные манипуляции, введя различные модульные соединения, которые можно заменить для различных задач, таких как медленное и точное манипулирование тяжелыми объектами или перемещение более легких объектов со скоростью и маневренностью.
Аналогичным образом, концепция привода JDS может быть полезна при разработке медицинских устройств, таких как протез локтя / руки верхней конечности, как показано на рис.18. В полностью пластиковом или гибридном сочетании пластик-металл JDS может обеспечить эффективный источник легкого срабатывания с батарейным питанием для таких устройств.
Чтобы оценить жизнеспособность этой технологии в космических приложениях, был проведен сравнительный анализ с летным приводом, предоставленным лабораторией реактивного движения НАСА. Стандартный полетный привод содержит двигатель в сборе, соединенный с многоступенчатой планетарной зубчатой передачей, через которую механическая энергия передается между ступенями через держатель рычага, как показано на рис.19.
Из-за этого передаточное число (на ступень) пропорционально радиусу рычага водила по радиусу шага солнечной шестерни. Это накладывает ограничения на радиус шага солнечной шестерни и приводит к подрезанию солнечной шестерни, когда передаточное число превышает 8: 1 на ступень. В результате этого ограничения эта компоновка требует наличия нескольких ступеней для достижения высоких соотношений, что приводит к длинным, громоздким и сложным сборкам с большим количеством деталей и большим весом.На рисунке 20 показано сравнение аппаратной архитектуры стандартного полетного актуатора и предлагаемой концепции конструкции.
Очевидно, что предлагаемая конструкция JDS может значительно сократить количество частей системы совместного привода обычного робота, что приведет к созданию более компактных и надежных космических систем. Уменьшение количества деталей тесно связано с повышением надежности и снижением риска отказа, что имеет первостепенное значение в космических полетах.Подробное сравнение показано в Таблице 4.
Сравнительный анализ JDS и гармонических приводов зависит от требований приложения, поскольку гармоники — это единственные передачи с сильно нелинейными жесткостью и трением. Чтобы проиллюстрировать некоторые из основных различий, одна конфигурация JDS сравнивается с гармонической передачей размером 25 с аналогичным выходным крутящим моментом, как показано в таблице 5.Очевидно, что трансмиссия Harmonic Drive превосходит конструкцию JDS во многих категориях, таких как количество деталей и объемная плотность крутящего момента, а также люфт. Однако гармонический привод демонстрирует гораздо большее рассеивание трения по сравнению с JDS из-за его механизма скользящей сетки и ограничивается передаточными числами ниже 1: 320 в основном из-за того, что его передаточное число определяется углом клина профиля его зуба. которое становится слишком узким выше этого отношения. С другой стороны, трансмиссия HD имеет нулевой люфт между валом двигателя и звеном робота, тогда как люфт в JDS в значительной степени определяется классом передач AGMA.Увеличение класса шестерни ужесточает допуски и уменьшает люфт, но не устраняет его.
В случае космического применения, в котором скорость и динамические эффекты менее значительны по сравнению со статическим крутящим моментом, поскольку космические роботы движутся с низкой скоростью, интегрированная концепция JDS может привести к уменьшению размера и более эффективной системе привода по сравнению с системой привода космического робота, которая использует передачу с гармоническим приводом. Это связано с тем, что высокое передаточное число трансмиссии JDS снижает требования к максимальному крутящему моменту двигателя, тем самым позволяя использовать двигатель меньшего размера, который занимает меньше места, потребляет меньше тока и выделяет меньше тепла по сравнению с двигателем. управление трансмиссией с гармонической передачей.Кроме того, поскольку конструкция JDS может поддерживать высокие передаточные числа, она не допускает движения задним ходом и не требует фиксирующего тормоза на валу двигателя при больших передаточных числах, как в случае большинства аппаратных средств космического привода. Кроме того, жесткость JDS, вероятно, будет выше, чем у гармонического привода из-за его жестких компонентов зубчатой передачи, в отличие от гибкости гармонического привода. Увеличение жесткости JDS и плотности крутящего момента может быть достигнуто за счет добавления большего количества планет в сборку JDS. Это стало возможным благодаря его конструкции без носителя, которая ослабляет кинематические ограничения на механизм, чтобы принимать больше планет.Наконец, концепция JDS — это попытка численно оптимизировать систему привода робота, которая состоит из двигателя, трансмиссии и несущей конструкции, тогда как гармонические приводы являются дискретными элементами передачи.
Глоссарий терминов по робототехнике | Определения и примеры робототехники
Термины, определения и примеры робототехники
Функция графического 3D-дисплея
Функция трехмерного графического отображения (далее именуемая функцией трехмерного отображения) заключается в том, что трехмерная модель робота отображается в окне подвесного программирования, и может быть подтверждено текущее значение робота.Используя многооконную функцию, позиция обучения задания, отображаемая в содержании задания, также может быть подтверждена в окне 3D-дисплея. Когда функция функциональной безопасности активна, также может отображаться диапазон функциональной безопасности.
Абсолютные данные (данные ABSO)
Абсолютные данные (данные ABSO) — это поправочный коэффициент для данных, который устанавливает указанное нулевое значение, когда робот находится в заданном исходном положении (положение калибровки).
Точность
Точность — это измерение отклонения между командной характеристикой и достигнутой характеристикой (R15.05-2), или точность, с которой может быть достигнуто вычисленное или вычисленное положение робота. Точность обычно хуже, чем повторяемость руки. Точность не является постоянной по всему рабочему пространству из-за влияния кинематики звена.
Активный совместимый робот
Активно совместимый робот — это робот, в котором изменение движения во время выполнения задачи инициируется системой управления. Модификация индуцированного движения незначительна, но достаточна для облегчения выполнения желаемой задачи.
Фактическое положение
Положение или расположение точки управления инструментом. Обратите внимание, что это не будет точно таким же, как позиция запроса, из-за множества невыявленных ошибок, таких как отклонение линии связи, нерегулярность передачи, допуски в длине линии связи и т. Д.
Привод
Силовой механизм, используемый для движения или поддержания положения робота (например, двигатель, который преобразует электрическую энергию, чтобы вызвать движение робота) (R15.07). Привод реагирует на сигнал, полученный от системы управления.
Плечо
Связанный набор звеньев и механических соединений, включающий робот-манипулятор, который поддерживает и / или перемещает запястье и кисть или рабочий орган в пространстве. Сама рука не имеет рабочего органа.
См. Манипулятор, Рабочий орган и Запястье.
Шарнирно-сочлененный манипулятор
Манипулятор с рукой, которая разделена на секции (звенья) одним или несколькими суставами.Каждое из сочленений представляет собой степень свободы в системе манипулятора и допускает поступательное и вращательное движение.
Шарнирное соединение
Описывает сочлененное устройство, такое как сочлененный манипулятор. Шарниры обеспечивают вращение вокруг вертикальной оси и подъем из горизонтальной плоскости. Это позволяет роботу достигать ограниченного пространства.
Робот-сборщик
Робот, специально разработанный для стыковки, подгонки или иной сборки различных деталей или компонентов в готовые изделия.В основном используется для захвата деталей и соединения или подгонки их друг к другу, например, при производстве на конвейере.
Функция автоматического измерения
Для оптимального движения робота необходимо указать массовые характеристики рабочего органа. Эти свойства могут быть получены из CAD-модели инструмента. Функция автоматического измерения является альтернативой модели САПР и использует саму руку робота для измерения свойств инструмента. С помощью этой функции пользователь может регистрировать нагрузку на инструмент, положение центра тяжести инструмента и момент инерции в центре тяжести.
Автоматический режим
См. Режим воспроизведения.
Ось
Направление, используемое для задания движения робота в линейном или вращательном режиме. (ISO 8373)
Помехи осей
Область пересечения осей — это функция, которая определяет текущее положение каждой оси и выводит сигнал в зависимости от того, находится ли текущее положение в пределах заранее определенного диапазона.
База
Устойчивая платформа, к которой крепится промышленный робот-манипулятор.
Базовая система координат
Базовая система координат (иногда называемая мировой системой координат) определяет общую опорную точку для ячейки или приложения. Это полезно при использовании нескольких роботов или устройств, поскольку позиции, определенные в базовых координатах, будут одинаковыми для всех роботов и устройств. (см. рисунок справа)
Базовая ссылка
Стационарная базовая конструкция манипулятора, поддерживающая первый сустав.
Приработка
Burn-In — это процедура тестирования робота, при которой все компоненты робота работают непрерывно в течение длительного периода времени.Это делается для проверки движения и программирования движения робота на ранних этапах, чтобы избежать сбоев в работе после развертывания.
Система автоматизированного проектирования (CAD)
Компьютерное проектирование (САПР). Приложения компьютерной графики, предназначенные для проектирования объектов (или частей), которые должны быть изготовлены. Компьютер используется в качестве инструмента для разработки схем и создания чертежей, которые позволяют точно производить объект. Система CAD позволяет создавать трехмерные чертежи основных фигур, точно определять размеры и размещение компонентов, создавать линии заданной длины, ширины или угла, а также удовлетворять различные геометрические формы.Эта система также позволяет проектировщику испытывать моделируемую деталь при различных напряжениях, нагрузках и т. Д.
Карусель
Вращающаяся платформа, которая доставляет объекты роботу и служит системой очереди объектов. Эта карусель доставляет объекты или детали на станцию загрузки / выгрузки робота.
Декартовы координаты
Декартовы координаты — это тип системы координат, которая определяет положение точки в двухмерном пространстве с помощью пары числовых чисел, которые дополнительно определяют расстояние до фиксированных осей, перпендикулярных друг другу.Проще говоря, график XY представляет собой двумерную декартову систему координат. Когда точка задана в трехмерном пространстве (график XYZ), она составляет трехмерную декартову систему координат. Положение TCP робота указывается в декартовой системе координат.
Декартов манипулятор
Декартов манипулятор — это манипулятор с призматическими шарнирами, который позволяет перемещаться по одной или нескольким из трех осей в системе координат X, Y, Z.
Декартова топология
Топология, в которой повсюду используются призматические соединения, обычно расположенные перпендикулярно друг другу.
Робот с декартовыми координатами
Робот с декартовыми координатами — это робот, чьи степени свободы манипулятора определяются декартовыми координатами. Это описывает движения восток-запад, север-юг и вверх-вниз, а также вращательные движения для изменения ориентации.
Категория 3 (Cat3)
Категория 3 (категория 3) означает, что части системы управления, связанные с безопасностью, будут спроектированы таким образом, чтобы:
Единичные неисправности не препятствуют правильной работе функции безопасности.
Одиночные неисправности будут обнаружены при следующем запросе функции безопасности или до него.
Когда происходит единичный отказ, безопасное состояние должно поддерживаться до тех пор, пока обнаруженный отказ не будет исправлен.
Обнаружены все разумно предсказуемые неисправности.
Центробежная сила
Когда тело вращается вокруг оси, отличной от оси, расположенной в центре его масс, оно оказывает на ось направленную наружу радиальную силу, называемую центробежной силой, которая удерживает его от движения по прямой тангенциальной линии.Чтобы компенсировать эту силу, робот должен приложить противоположный крутящий момент в суставе вращения.
Тип кругового движения
Расчетный путь, который выполняет робот, имеет круглую форму.
Зажим
Конечный эффектор, который служит пневматической рукой, которая контролирует захват и отпускание объекта. Тактильные датчики и датчики силы обратной связи используются для управления силой, приложенной зажимом к объекту. См. «Концевой эффектор».
Зажим
Максимально допустимая сила, действующая на область тела в результате столкновения робота, когда период контакта приводит к пластической деформации мягких тканей человека.
Сила зажима
При контакте может быть зажат части тела (частей).
Замкнутый
Управление осуществляется роботом-манипулятором посредством обратной связи. Когда манипулятор находится в действии, его датчики постоянно передают информацию контроллеру робота, который используется для дальнейшего направления манипулятора в рамках данной задачи. Многие датчики используются для передачи информации о размещении манипулятора, скорости, крутящем моменте, приложенных силах, а также о размещении целевого движущегося объекта и т. Д.См. Обратную связь.
Робот для совместной работы
Термин, используемый для описания роботизированной системы, предназначенной для работы в одном или нескольких из четырех совместных режимов.
Интерпретатор команд
Модуль или набор модулей, определяющий значение полученной команды. Команда разбивается на части (разбирается) и обрабатывается.
Командная позиция
Конечная точка движения робота, которую пытается достичь контроллер.
Соответствие
Смещение манипулятора в ответ на силу или крутящий момент. Высокая податливость означает, что манипулятор немного перемещается при нагрузке. Это называется пористым или упругим. При стрессе низкая комплаенс будет жесткой системой.
Робот, соответствующий стандарту
Робот, который выполняет задачи по отношению к внешним силам, изменяя свои движения таким образом, чтобы эти силы сводились к минимуму. Указанное или разрешенное движение достигается за счет поперечной (горизонтальной), осевой (вертикальной) или вращательной податливости.
Конфигурация
Расположение ссылок, созданное определенным набором совместных позиций на роботе. Обратите внимание, что может быть несколько конфигураций, приводящих к одному и тому же положению конечной точки.
Контактный датчик
Устройство, которое обнаруживает присутствие объекта или измеряет величину приложенной силы или крутящего момента, приложенного к объекту при физическом контакте с ним. Контактное зондирование можно использовать для определения местоположения, идентичности и ориентации деталей.
Непрерывный путь
Описывает процесс, в котором робот контролирует весь пройденный путь, в отличие от метода обхода от точки к точке. Это используется, когда траектория рабочего органа наиболее важна для обеспечения плавного движения, например, при окраске распылением и т. Д. См. Двухточечный.
Алгоритм управления
Монитор, используемый для обнаружения отклонений траектории, в котором датчики обнаруживают такие отклонения, и приложения крутящего момента вычисляются для приводов.
Команда управления
Команда, передаваемая роботу с помощью устройства ввода от человека к машине. См. Кулон (Обучение). Эта команда принимается системой контроллера робота и интерпретируется. Затем соответствующая команда подается на исполнительные механизмы робота, которые позволяют ему реагировать на начальную команду. Часто команда должна интерпретироваться с использованием логических единиц и определенных алгоритмов. См. «Устройство ввода и цикл команд».
Устройство управления
Любая часть управляющего оборудования, обеспечивающая средства для вмешательства человека в управление роботом или роботизированной системой, например кнопка аварийного останова, кнопка запуска или селекторный переключатель.(R15.06)
Режим управления
Средства, с помощью которых инструкции передаются роботу.
Управляемость
Свойство системы, с помощью которого входной сигнал может переводить систему из начального состояния в желаемое состояние по предсказуемому пути в течение заранее определенного периода времени.
Контроллер
Устройство обработки информации, входными данными которого являются как желаемое, так и измеренное положение, скорость или другие соответствующие переменные в процессе, а выходными данными являются управляющие сигналы для управляющего двигателя или исполнительного механизма.(R15.02)
Контроллерная система
Механизм управления роботом обычно представляет собой компьютер определенного типа, который используется для хранения данных (как робота, так и рабочей среды), а также хранения и выполнения программ, управляющих роботом. Система Контроллера содержит программы, данные, алгоритмы; логический анализ и различные другие операции обработки, которые позволяют ему выполнять. См. Робот.
Система координат или рамка
Система координат (или рамка) определяет исходное положение и ориентацию, с которой можно измерить положение робота.Все положения робота определены со ссылкой на систему координат. Роботы Yaskawa используют следующие системы координат:
Центральный процессор (ЦП)
Центральный процессор (ЦП) — это основная печатная плата и процессор системы контроллера.
Кубическая зона помех
Эта область представляет собой прямоугольный параллелепипед, который параллелен базовой координате, координате робота или координате пользователя. Контроллер YRC1000 определяет, находится ли текущее положение TCP манипулятора внутри или за пределами этой области, и выводит это состояние в качестве сигнала.
Цикл
Однократное выполнение полного набора движений и функций, содержащихся в программе робота. (R15.05-2)
Циклическая система координат
Система координат, которая определяет положение любой точки с точки зрения углового размера, радиального размера и высоты от базовой плоскости. Эти три измерения определяют точку на цилиндре.
Цикло-привод
Торговая марка устройства понижения скорости, которое преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости, обычно используемое на большой (большей) оси.
Цилиндрическая топология
Топология, в которой плечо следует радиусом горизонтального круга с призматическим шарниром для подъема или опускания круга. Не пользуется популярностью в промышленности.
Выключатель аварийного отключения
Устаревший срок. См. Включение устройства.
степеней свободы
Количество независимых направлений или суставов робота (R15.07), которые позволяют роботу перемещать свой конечный эффектор через требуемую последовательность движений.Для произвольного позиционирования необходимо 6 степеней свободы: 3 для положения (влево-вправо, вперед-назад и вверх-вниз) и 3 для ориентации (рыскание, тангаж и крен).
Прямой привод
Совместное срабатывание, в том числе без элементов трансмиссии (т. Е. Тяга привинчена к выходу двигателя).
Время простоя
Период времени, в течение которого робот или производственная линия останавливаются из-за неисправности или отказа. См. Время безотказной работы.
Привод
Редуктор скорости (зубчатый) для преобразования низкого крутящего момента на высокой скорости в высокий крутящий момент на низкой скорости.См. Разделы Harmonic Drive, Cyclo Drive и Rotary Vector Drive).
Прямая доставка
Метод подвода предмета к рабочему месту под действием силы тяжести. Обычно желоб или контейнер размещают таким образом, чтобы по окончании работы над деталью она упала или упала в желоб или на конвейер с небольшой или отсутствующей транспортировкой робота.
Динамика
Изучение движения, сил, вызывающих движение, и сил, обусловленных движением. Динамика манипулятора робота очень сложна, поскольку является результатом кинематического поведения всех масс внутри конструкции руки.Кинематика манипулятора робота сложна сама по себе.
Аварийный останов
Работа схемы с использованием аппаратных компонентов, которая перекрывает все другие органы управления роботом, снимает мощность привода с исполнительных механизмов робота и вызывает остановку всех движущихся частей. (R15.06)
Переключатель включения
См. Включение устройства.
Разрешающее устройство
Устройство с ручным управлением, которое при постоянном включении разрешает движение.Освобождение устройства должно остановить движение робота и связанное с ним оборудование, которое может представлять опасность. (R15.06)
Кодировщик
Устройство обратной связи в руке робота-манипулятора, которое предоставляет контроллеру данные о текущем положении (и ориентации руки). Луч света проходит через вращающийся кодовый диск, который содержит точный узор из непрозрачных и прозрачных сегментов на своей поверхности. Свет, который проходит через диск, попадает в фотодетекторы, которые преобразуют световой рисунок в электрические сигналы.См. Раздел «Обратная связь, управление с обратной связью» и «Датчик обратной связи».
EOAT
См. Захват или Концевой эффектор.
Рабочий орган
Вспомогательное устройство или инструмент, специально предназначенные для крепления к запястью робота или монтажной пластине для инструмента, чтобы робот мог выполнять свою задачу. (Примеры могут включать: захват, пистолет для точечной сварки, пистолет для дуговой сварки, распылительный пистолет или любые другие инструменты.) (R15.06)
Конечная точка
Номинальное управляемое положение, которого манипулятор будет пытаться достичь в конце пути движения.Конец дистального звена.
Ошибка
Разница между фактическим ответом робота и отданной командой.
Расширяемость
Возможность добавлять в систему ресурсы, такие как память, жесткий диск большего размера, новая карта ввода-вывода и т. Д.
Предел внешнего усилия
Пороговое значение, при котором робот перемещается или сохраняет свое положение, даже при приложении внешних сил (при условии, что силы не превышают пределов, которые могут вызвать ошибку).
Обратная связь
Возврат информации от манипулятора или датчика к процессору робота для обеспечения самокорректирующегося управления манипулятором.
См. Раздел «Управление обратной связью» и «Датчик обратной связи».
Управление с обратной связью
Тип управления системой, получаемый, когда информация от манипулятора или датчика возвращается контроллеру робота для получения желаемого эффекта робота. См. Раздел «Обратная связь, управление с обратной связью» и «Датчик обратной связи».
Датчик обратной связи
Механизм, через который информация от сенсорных устройств возвращается в блок управления робота. Информация используется в последующем направлении движения робота. См. Управление с обратной связью и управление с обратной связью.
Гибкость
Способность робота выполнять самые разные задачи.
Силовая обратная связь
Метод обнаружения, использующий электрические сигналы для управления рабочим органом робота во время работы рабочего органа.Информация поступает от датчиков силы рабочего органа к блоку управления роботом во время выполнения конкретной задачи, чтобы обеспечить улучшенную работу рабочего органа.
См. Раздел «Обратная связь», «Датчик обратной связи» и «Датчик силы».
Датчик силы
Датчик, способный измерять силы и крутящий момент, прилагаемые роботом и его запястьем. Такие датчики обычно содержат тензодатчики. Датчик предоставляет информацию, необходимую для обратной связи по силе. См. Force Feedback
Решение для прямой кинематики
Расчет, необходимый для определения положения конечной точки с учетом положений шарниров.Для большинства топологий роботов это проще, чем найти решение с обратной кинематикой.
Передняя кинематика
Вычислительные процедуры, определяющие, где находится рабочий орган робота в пространстве. В процедурах используются математические алгоритмы вместе с совместными датчиками для определения его местоположения.
Рамка
Система координат, используемая для определения положения и ориентации объекта в пространстве, а также положения робота в его модели.
Блок функциональной безопасности (FSU)
Блок функциональной безопасности (FSU) — это компонент контроллера робота Yaskawa, который обеспечивает программируемые функции безопасности, которые обеспечивают совместную работу робота. Поскольку эти функции безопасности являются программируемыми, FSU позволяет минимизировать площадь, занимаемую расположенным поблизости оборудованием, а также зоны, доступные для человека. FSU состоит из двух параллельных центральных процессоров (ЦП), работающих одновременно, что обеспечивает двухканальную проверку.Кроме того, FSU получает позицию робота от своих энкодеров независимо от системы управления движением робота. Основываясь на этой обратной связи, FSU контролирует положение, скорость и положение манипулятора и инструмента.
Портал
Регулируемый подъемный механизм, который перемещается по фиксированной платформе или гусенице, поднятому или на уровне земли по осям X, Y, Z.
Портальный робот
Робот с тремя степенями свободы по системе координат X, Y и Z.Обычно состоит из системы намотки (используемой как кран), которая при намотке или размотке обеспечивает движение вверх и вниз по оси Z. Катушка может скользить слева направо по валу, который обеспечивает движение по оси Z. Катушка и вал могут двигаться вперед и назад по направляющим, которые обеспечивают движение по оси Y. Обычно используется, чтобы расположить концевой эффектор над желаемым объектом и поднять его.
Гравитационная загрузка
Сила, прилагаемая вниз, из-за веса манипулятора робота и / или нагрузки на конце руки.Сила создает ошибку в отношении точности положения концевого эффектора. Компенсирующая сила может быть вычислена и применена, чтобы вернуть руку в желаемое положение.
Захват
Концевой эффектор, предназначенный для захвата и удержания (ISO 8373), а также «захватывания» или захвата объекта. Он прикреплен к последнему звену руки. Он может удерживать объект, используя несколько различных методов, таких как: приложение давления между своими «пальцами», или может использовать намагничивание или вакуум для удержания объекта и т. Д.См. «Концевой эффектор».
Ручная
Зажим или захват, используемый в качестве рабочего органа для захвата предметов. См. Концевой эффектор, Захват.
Ручное управление
Совместная функция, позволяющая оператору вручную направлять робота в желаемое положение. Эта задача может быть решена за счет использования дополнительного внешнего оборудования, установленного непосредственно на роботе, или робота, специально разработанного для поддержки этой функции. Оба решения потребуют использования элементов функциональной безопасности.Оценка риска должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Гармонический привод
Компактный легкий редуктор, который преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости. Обычно находится на малой (меньшей) оси.
Ремень
Обычно несколько проводов, связанных вместе для подачи питания и / или передачи сигналов к / от устройств. Например, двигатели робота подключены к контроллеру через жгут проводов.
Опасное движение
Непреднамеренное / неожиданное движение робота, которое может привести к травме.
Задержка
Остановка всех движений робота во время его последовательности, при которой на роботе сохраняется некоторая мощность. Например, выполнение программы останавливается, однако питание серводвигателей остается включенным, если требуется перезапуск.
Исходное положение
Известное и фиксированное положение на основной оси координат манипулятора, где он останавливается, или в указанном нулевом положении для каждой оси.Это положение уникально для каждой модели манипулятора. На роботах Motoman® есть индикаторные метки, которые показывают исходное положение для соответствующей оси.
МЭК
Международная электротехническая комиссия
Индуктивный датчик
Класс датчиков приближения, который имеет половину ферритового сердечника, катушка которого является частью цепи генератора. Когда металлический объект входит в это поле, в какой-то момент объект поглощает достаточно энергии из поля, чтобы заставить осциллятор перестать колебаться.Это означает, что объект присутствует в заданной близости. См. Датчик приближения.
Промышленный робот
Перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материалов, деталей, инструментов или специализированных устройств посредством переменных запрограммированных движений для выполнения множества задач (R15.06). Основные компоненты: одна или несколько рук, которые могут двигаться в нескольких направлениях, манипулятор и компьютерный контроллер, который дает подробные инструкции по перемещению.
ИНФОРМАЦИЯ
Язык программирования роботов для роботов Yaskawa. Язык ИНФОРМ позволяет пользователю робота: инструктировать робота использовать его основные возможности для выполнения определенного набора ожиданий, а также описывать роботу через определение параметров и условий, какие ожидания существуют в определенных ситуациях или сценариях. Проще говоря, язык программирования INFORM позволяет пользователю указывать роботу, что делать, когда это делать, где это делать и как это делать.
Устройства ввода
Разнообразные устройства, позволяющие взаимодействовать между человеком и машиной. Это позволяет человеку программировать, управлять и моделировать робота. К таким устройствам относятся пульт для программирования, компьютерные клавиатуры, мышь, джойстики, кнопки, панель оператора, тумба оператора и т. Д.
Инструкция
Строка программного кода, вызывающая действие системного контроллера. См. Командное положение.
Цикл команд
Время, которое требуется циклу системы контроллера робота для декодирования команды или инструкции перед ее выполнением.Программисты-роботы должны очень внимательно анализировать цикл команд, чтобы обеспечить быструю и правильную реакцию на изменяющиеся команды.
Интегрировать
Чтобы объединить разные подсистемы, такие как роботы и другие устройства автоматизации, или, по крайней мере, разные версии подсистем в одной оболочке управления.
Интегратор
Компания, предоставляющая услуги с добавленной стоимостью, результатом которых является создание решений автоматизации путем объединения робота и другого оборудования автоматизации и управления для создания решения автоматизации для конечных пользователей.
Интеллектуальный робот
Робот, который можно запрограммировать на выбор производительности в зависимости от сенсорных входов с минимальной или нулевой помощью со стороны человека. См. Робот.
Зона помех
Зона помех — это функция, которая предотвращает помехи между несколькими манипуляторами или манипулятором и периферийным устройством. Области можно настроить до 64 областей. Три типа методов использования каждой области интерференции: кубическая интерференция, вне кубической области и осевая интерференция.
Интерполяция
Метод создания путей к конечным точкам. В общем, для задания движения несколько узловых точек определяются до того, как все промежуточные положения между ними вычисляются с помощью математической интерполяции. Таким образом, используемый алгоритм интерполяции существенно влияет на качество движения.
ISO
Международная организация по стандартизации
ISO 10218-1 Роботы и робототехнические устройства — Требования безопасности для промышленных роботов — Часть 1: Роботы
Спецификация безопасности робота, в которой рассматриваются требования производителя, функциональность, требуемые характеристики безопасности, опасности, меры защиты и документация для самого робота.
ISO 10218-2 Роботы и роботизированные устройства — Требования безопасности для промышленных роботов — Часть 2: Роботные системы и интеграция
Сопутствующий документ ISO 10218-1. Эта спецификация безопасности представляет собой руководство как для конечных пользователей, так и для интеграторов роботов в части безопасного проектирования, установки и ввода в эксплуатацию робототехнических систем, а также рекомендуемых процедур, мер безопасности и информации, необходимой для использования.
ISO TS 15066 (ANSI RIA 15.606): Роботы и роботизированные устройства — Совместные роботы
Предоставляет подробные инструкции, отсутствующие в ISO 10218, части 1 или 2, по безопасному использованию промышленных роботов, работающих совместно.
Матрица Якоби
Матрица Якоби связывает скорости изменения совместных значений со скоростью изменения координат конечных точек. По сути, это набор алгоритмов вычислений, которые обрабатываются для управления позиционированием робота.
РАБОТА
JOB — это название Yaskawa программы для роботов, созданной с использованием языка программирования роботов INFORM компании Yaskawa. Обычно задание состоит из инструкций, которые сообщают контроллеру робота, что делать, и данных, которые программа использует во время работы.
Шарнир
Часть системы манипулятора, которая обеспечивает степень свободы вращения и / или поступательного перемещения звена рабочего органа.
Совместное интерполированное движение
Метод координации движения суставов, при котором все суставы достигают желаемого места одновременно. Этот метод сервоуправления обеспечивает предсказуемый путь независимо от скорости и обеспечивает самое быстрое время цикла захвата и размещения для конкретного движения.
Тип шарнира движения
Тип совместного движения, также известный как двухточечное движение, представляет собой метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение непосредственно в заданное положение, так что все оси достигают этого положения одновременно. Хотя путь предсказуем, он не будет линейным.
Совместное пространство
а. Совместное пространство (или совместные координаты) — это просто метод определения положения робота с точки зрения значения каждой оси, а не положения TCP.Например, исходное положение робота часто определяется в Joint Space, поскольку каждая ось находится под углом 0 градусов.
б. Набор совместных позиций.
Соединения
Части манипулятора робота, которые действительно сгибаются или двигаются.
Кинематика
Связь между движением конечной точки робота и движением суставов. Для декартова робота это набор простых линейных функций (линейные дорожки, которые могут быть расположены в направлениях X, Y, Z), для вращающейся топологии (шарниры, которые вращаются), однако кинематика намного сложнее, включая сложные комбинации тригонометрии. функции.Кинематика руки обычно делится на прямое и обратное решения.
Захват ковша
Конечный эффектор, который действует как совок. Он обычно используется для сбора жидкости, переноса ее в форму и заливки жидкости в форму. Обычно используется для работы с расплавленным металлом в опасных условиях. См. «Концевой эффектор».
Лазер
Акроним от «Усиление света за счет вынужденного излучения». Устройство, которое производит когерентный монохроматический луч света, который является чрезвычайно узким и сфокусированным, но все же находится в пределах видимого светового спектра.Обычно он используется в качестве бесконтактного датчика для роботов. Роботизированные приложения включают: определение расстояния, определение точного местоположения, картографирование поверхности, сканирование штрих-кода, резку, сварку и т. Д.
Линейное движение с интерполяцией
Это метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение скоординированным движением, так что все оси достигают позиции одновременно. Путь контрольной точки инструмента (TCP) предсказуем и будет линейным.
Линейный тип
Это метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение скоординированным движением, так что все оси достигают позиции одновременно. Путь контрольной точки инструмента (TCP) предсказуем и будет линейным.
Ссылка
Жесткая часть манипулятора, соединяющая соседние суставы.
Ссылки
Статический материал, который соединяет суставы руки вместе.Тем самым образуется кинематическая цепочка. В человеческом теле звеньями являются кости.
Время цикла нагрузки
Термин технологического процесса производственной или сборочной линии, который описывает полное время, необходимое для выгрузки последней заготовки и загрузки следующей.
Магнитные детекторы
Датчики роботов, которые могут определять присутствие ферромагнитного материала. Твердотельные детекторы с соответствующим усилением и обработкой могут обнаруживать металлический объект с высокой степенью точности.См. Датчик.
Манипулятор
Механизм машины или робота, который обычно состоит из серии сегментов (соединенных или скользящих друг относительно друга) с целью захвата и / или перемещения объектов (частей или инструментов), обычно с несколькими степенями свободы. Управление манипулятором может осуществляться оператором, программируемым электронным контроллером или любой логической системой (например, кулачковым устройством, проводным и т. Д.) (ISO 8373)
См. Руку, запястье и рабочий орган
Ручной режим
См. Режим обучения.
Погрузочно-разгрузочные работы
Процесс, с помощью которого промышленный робот-манипулятор переносит материалы из одного места в другое.
Робот для обработки материалов
Робот, спроектированный и запрограммированный таким образом, чтобы он мог обрабатывать, резать, формировать или изменять форму, функцию или свойства материалов, с которыми он работает, между моментом, когда материалы впервые схвачены, и временем их выпуска в производственный процесс.
Функция сдвига зеркала
С помощью функции зеркального сдвига задание преобразуется в задание, в котором траектория симметрична пути исходного задания.Это преобразование может быть выполнено для указанной координаты из координат X-Y, X-Z или Y-Z координат робота и координат пользователя. Функция зеркального смещения подразделяется на следующие три: функция импульсного зеркального смещения, функция зеркального смещения координат робота и функция зеркального смещения пользовательских координат. (см. рисунок справа)
Переключатель режима
В соответствии со стандартами безопасности промышленный робот имеет три различных режима работы. Это обучение (также называемое ручным), воспроизведение (также называемое автоматическим) и дистанционное управление.Переключение между этими режимами осуществляется с помощью переключателя с ключом на подвесном пульте обучения и называется переключателем режима.
Модульность
Свойство гибкости встроено в робота и систему управления путем сборки отдельных узлов, которые можно легко соединить или скомпоновать с другими частями или узлами.
Модуль
Автономный компонент пакета. Этот компонент может содержать подкомпоненты, известные как подмодули.
Ось движения
Линия, определяющая ось движения линейного или поворотного сегмента манипулятора.
Двигатель
См. Серводвигатель.
Отключение звука
При тестировании программы робота отключение любых устройств защиты от присутствия во время полного цикла робота или его части.
Автономное программирование
Метод программирования, при котором целевая программа определяется на устройствах или компьютерах отдельно от робота для последующего ввода программной информации роботу. (ISO 8373) б.Средство программирования робота во время его работы. Это становится важным при производстве и производстве сборочных линий из-за сохранения высокой производительности, пока робот программируется для других задач.
Оператор
Лицо, уполномоченное запускать, контролировать и останавливать запланированную производительную работу робота или роботизированной системы. Оператор также может взаимодействовать с роботом для производственных целей. (R15.06)
Оптический кодировщик
Датчик обнаружения, который измеряет линейное или вращательное движение, обнаруживая движение маркировки мимо фиксированного луча света.Его можно использовать для подсчета оборотов, идентификации деталей и т. Д.
Оптические датчики приближения
Датчики роботов, которые измеряют видимый или невидимый свет, отраженный от объекта, для определения расстояния. Лазеры используются для большей точности.
Ориентация
Угол, образованный большой осью объекта относительно базовой оси. Он должен быть определен относительно трехмерной системы координат. Угловое положение объекта относительно системы отсчета робота.См. Roll, Pitch и Yaw.
Укладка на поддоны
Организованный процесс штабелирования пакетов (т. Е. Ящиков, пакетов, контейнеров и т. Д.) На поддоне.
Функция PAM — регулировка положения вручную
Регулировка положения вручную позволяет регулировать положение с помощью простых операций, наблюдая за движением манипулятора и не останавливая манипулятор. Позиции можно регулировать как в режиме обучения, так и в режиме воспроизведения.
Функция параллельного смещения
Параллельный сдвиг относится к смещению объекта из фиксированного положения таким образом, что все точки внутри объекта перемещаются на равное расстояние.В модели для параллельного смещения, показанной ниже, значение смещения может быть определено как расстояние L (трехмерное координатное смещение). Функция параллельного смещения имеет отношение к фактической работе манипулятора, поскольку ее можно использовать для уменьшения объема работы, связанной с обучением, путем смещения обученного пути (или положения). В примере на рисунке ниже обученная позиция A сдвигается с шагом на расстояние L (на самом деле это трехмерное смещение XYZ, которое может распознать робот).
Путь
Непрерывное геометрическое место позиций (или точек в трехмерном пространстве), пересекаемое центральной точкой инструмента и описываемое в указанной системе координат. (R15.05-2)
Полезная нагрузка — максимальная
Максимальная масса, которой робот может манипулировать при указанной скорости, ускорении / замедлении, расположении (смещении) центра тяжести и воспроизводимости при непрерывной работе в указанном рабочем пространстве. Максимальная полезная нагрузка указана в килограммах.(R15.05-2)
Кулон [Подвеска Teach]
Переносное устройство ввода, связанное с системой управления, с помощью которой можно программировать или перемещать робота. (ISO 8373) Это позволяет человеку-оператору занять наиболее удобное положение для наблюдения, контроля и записи желаемых движений в памяти робота.
Кулон обучающий
Отображение и запись положения и ориентации системы робота и / или манипулятора по мере того, как робот вручную поэтапно перемещается от начального состояния по пути к конечному целевому состоянию.Положение и ориентация каждой критической точки (суставы, база робота и т. Д.) Записываются и сохраняются в базе данных для каждой обученной позиции, через которую проходит робот на пути к своей конечной цели. Теперь робот может повторить путь самостоятельно, следуя пути, сохраненному в базе данных.
Уровень эффективности d (PLd)
Уровень эффективности (PL) ISO «d» означает, что средняя вероятность опасного отказа в час связанных с безопасностью частей системы управления находится в пределах от ≥ 10-7 до <10-6.Кроме того, учитываются и другие факторы, такие как правильная установка, техническое обслуживание и защита от факторов окружающей среды. Это минимальный уровень эффективности, указанный в ISO 10218-2, раздел 5.2.2, если оценка риска не позволит использовать более низкое значение.
Уровень эффективности e (PLe)
Уровень эффективности ISO (PL) «e» означает, что средняя вероятность опасного отказа в час связанных с безопасностью частей системы управления находится в пределах от ≥ 10-8 до <10-7.Кроме того, учитываются и другие факторы, такие как правильная установка, техническое обслуживание и защита от факторов окружающей среды.
Цикл подбора и установки
Время, необходимое манипулятору, чтобы поднять объект и поместить его в желаемое место, а затем вернуться в исходное положение. Это включает время во время фаз ускорения и замедления конкретной задачи. Движение робота контролируется из одной точки в пространстве в другую в системе движения «точка-точка» (PTP).Каждая точка запрограммирована в управляющую память робота, а затем воспроизводится во время рабочего цикла.
Задача по подбору и размещению
Повторяющаяся задача переноса детали, состоящая из действия подбора, за которым следует действие по размещению.
Точки защемления
Точка защемления — это любая точка, в которой человек или часть тела человека могут быть зажаты между движущимися частями машины, или между движущейся и неподвижной частями машины, или между материалом и любой частью машины. .Точка защемления не обязательно должна приводить к травме конечности или части тела, хотя может привести к травме — она должна только защемить или ущипнуть человека, чтобы он не смог вырваться или вынуть защемленную часть из точки защемления.
Шаг
Вращение рабочего органа в вертикальной плоскости вокруг конца руки робота-манипулятора.
См. Roll and Yaw.
Режим воспроизведения
После того, как робот запрограммирован в режиме обучения, контроллер робота можно переключить в режим воспроизведения для выполнения программы робота.В режиме воспроизведения воспроизводится программа робота. Это режим, в котором роботы используются в производстве.
Воспроизведение
Воспроизведение — это операция, при которой воспроизводится обученное задание. Эта функция используется, чтобы решить, где возобновить воспроизведение при запуске операции после приостановки воспроизведения и перемещения курсора или выбора других заданий. 0: запускает операцию, когда курсор находится в задании, отображаемом в данный момент. 1: Появится окно продолжения воспроизведения.Выберите «ДА», и воспроизведение возобновится в том месте, где находился курсор, когда воспроизведение было приостановлено. Если выбрано «НЕТ», воспроизведение возобновляется с того места, где находится курсор в задании, отображаемом в данный момент. Режимы Включите пульт программирования: PLAY — задание запускается кнопкой [СТАРТ] на пульте программирования, а задание REMOTE запускается периферийным устройством (внешний пусковой вход).
Точка-точка
Движение манипулятора, в котором задано ограниченное количество точек на прогнозируемой траектории движения.Манипулятор перемещается от точки к точке, а не по непрерывной плавной траектории.
Поза
Альтернативный термин для конфигурации робота, который описывает линейное и угловое положение. Линейное положение включает азимут, высоту и дальность до объекта. Угловое положение включает в себя крен, тангаж и рыскание объекта. См. Roll, Pitch и Yaw.
Позиция
Определение местоположения объекта в трехмерном пространстве, обычно определяемое трехмерной системой координат с использованием координат X, Y и Z.
Уровень позиции
Уровень положения — это степень приближения манипулятора к запрограммированному положению. Уровень положения может быть добавлен к командам перемещения MOVJ (совместная интерполяция) и MOVL (линейная интерполяция). Если уровень положения не установлен, точность зависит от скорости работы. Установка соответствующего уровня перемещает манипулятор по траектории, подходящей для окружающих условий и обрабатываемой детали. (см. рисунок справа)
Переменные положения
Переменные положения используются в программе робота (JOB) для определения местоположения в трехмерном пространстве, обычно определяемого трехмерной системой координат с использованием координат X, Y и Z.Поскольку это переменная, значение может меняться в зависимости от условий или информации, переданной в задание.
Ограничение мощности и усилия (PFL)
Совместная функция, которая позволяет оператору и роботу работать в непосредственной близости друг от друга, гарантируя, что робот замедлится и остановится до возникновения ситуации контакта. Для безопасной реализации этой функции необходимо использовать функциональную безопасность и дополнительное оборудование для обнаружения. Оценка рисков должна использоваться для определения необходимости дополнительных мер безопасности для снижения рисков в роботизированной системе.
Устройство защиты от присутствия
Устройство, разработанное, сконструированное и установленное для создания сенсорного поля для обнаружения вторжения в такое поле людьми, роботами или объектами. См. Датчик.
Программируемый логический контроллер (ПЛК)
Твердотельная система управления, которая имеет программируемую пользователем память для хранения инструкций для реализации определенных функций, таких как: логика управления вводом-выводом, синхронизация, счетная арифметика и обработка данных.ПЛК состоит из центрального процессора, интерфейса ввода / вывода, памяти и устройства программирования, в котором обычно используются эквивалентные символы реле. ПЛК специально разработан как промышленная система управления, которая может выполнять функции, эквивалентные релейной панели или проводной твердотельной логической системе управления, и может быть интегрирована в систему управления роботом.
Программируемый робот
Функция, позволяющая проинструктировать робота выполнить последовательность шагов, а затем выполнять эту последовательность повторяющимся образом.Затем его можно перепрограммировать для выполнения другой последовательности шагов, если это необходимо.
Датчик приближения
Бесконтактное сенсорное устройство, используемое для определения, когда объекты находятся на небольшом расстоянии, и оно может определять расстояние до объекта. Несколько типов включают: радиочастотный, магнитный мост, ультразвуковой и фотоэлектрический. Обычно используется для: высокоскоростного счета, обнаружения металлических предметов, контроля уровня, считывания кодовых меток и концевых выключателей. См. Индуктивный датчик.
Координаты импульса
Роботы Yaskawa определяют положение осей шарниров робота в градусах для поворотных шарниров.Импульс — это еще один способ указать положение сустава робота, и он используется при подсчете импульсов энкодера двигателя робота.
Обеспечение качества (ОК)
Описывает методы, политику и процедуры, необходимые для проведения тестирования обеспечения качества во время проектирования, производства и доставки этапов создания, перепрограммирования или обслуживания роботов.
Досягаемость: Объем пространства (конверт), которого может достичь рабочий орган робота, по крайней мере, в одной ориентации.
Квазистатический зажим
Тип контакта между человеком и частью робототехнической системы, при котором часть тела может быть зажата между движущейся частью роботизированной системы и другой неподвижной или движущейся частью роботизированной ячейки
Вылет
Объем пространства (оболочки), которого может достичь рабочий орган робота хотя бы в одной ориентации.
Система реального времени
Компьютерная система, в которой компьютер должен выполнять свои задачи в рамках временных ограничений некоторого процесса одновременно с системой, которой он помогает. Компьютер обрабатывает системные данные (входные данные) от датчиков с целью мониторинга и вычисления параметров (выходов) управления системой, необходимых для правильной работы системы или процесса. От компьютера требуется, чтобы он выполнял свою работу достаточно быстро, чтобы не отставать от оператора, взаимодействующего с ним через оконечное устройство (например, экран или клавиатуру).Оператор, взаимодействующий с компьютером, имеет возможность доступа, поиска и хранения через систему управления базами данных. Доступ к системе позволяет оператору вмешиваться и изменять работу системы.
Робот для воспроизведения записи
Манипулятор, для которого критические точки вдоль желаемых траекторий сохраняются последовательно путем записи фактических значений кодеров положения суставов робота, когда он перемещается под операционным управлением. Для выполнения задачи эти точки воспроизводятся в сервосистеме робота.См. Сервосистема.
Робот с прямоугольными координатами
Робот, рука манипулятора которого движется линейными движениями по набору декартовых или прямоугольных осей в направлениях X, Y и Z. Форма рабочего конверта образует прямоугольную фигуру. См. Рабочий конверт.
Надежность
Вероятность или процент времени, в течение которого устройство будет работать без сбоев в течение определенного периода времени или объема использования (R15.02). Также называется: время безотказной работы робота или среднее время наработки на отказ (MTBF).
Восстановленное
Для обновления или модификации роботов в соответствии с пересмотренными спецификациями производителя. (R15.06)
Удаленный режим
Удаленный режим — это тип режима воспроизведения, в котором автоматическое выполнение программы робота инициируется с внешнего устройства (а не с обучающего пульта). В этом режиме использование обучающего пульта отключено.
Повторяемость
Мера того, насколько близко рука может повторно занять заданное положение.Например: после того, как манипулятор вручную помещен в определенное место, и это местоположение определено роботом, повторяемость определяет, насколько точно манипулятор может вернуться в это точное местоположение. Степень разрешения в системе управления роботом определяет повторяемость. В общем, воспроизводимость руки никогда не может быть лучше, чем ее разрешение. См. «Обучение и точность».
Разрешение
Количество шарнирного движения робота, необходимое для изменения положения на один счет.Хотя разрешение каждого датчика совместной обратной связи обычно является постоянным, разрешение конечной точки в мировых координатах не является постоянным для поворотных рычагов из-за нелинейности кинематики рычага.
Поворотный шарнир
Суставы робота, способные к вращательному движению.
Оценка рисков
Процесс оценки предполагаемого использования машины или системы на предмет прогнозируемых опасностей и последующего определения уровня риска, связанного с идентифицированными задачами.
Снижение рисков
Вторичный шаг в процессе оценки риска, который включает снижение уровня риска для идентифицированных задач путем применения мер по снижению риска с целью устранения или смягчения опасностей.
Робот
Перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материала, деталей, инструментов или определенных устройств посредством переменных запрограммированных движений для выполнения множества задач. Общие элементы, из которых состоит робот: контроллер, манипулятор и рабочий орган.См. Манипулятор, Контроллер и Рабочий орган.
Система координат робота
Система координат робота определяется в базовой оси робота, а точки в системе координат робота будут относиться к базе робота. Обратите внимание, что по умолчанию базовая система координат и система координат робота одинаковы. (см. рисунок справа)
Робот-интегратор
См. Интегратор.
Язык программирования роботов
Интерфейс между человеком-пользователем и роботом, который связывает человеческие команды с роботом.
Робот, контролирующий пределы диапазона
Следит за тем, чтобы рука манипулятора или его инструмент находились в обозначенной зоне безопасности
Моделирование роботов
Метод имитации и прогнозирования поведения и работы роботизированной системы на основе модели (например, компьютерной графики) физической системы. (R15.07)
Рулон
Вращение концевого эффектора робота в плоскости, перпендикулярной концу руки манипулятора.См. Pitch and Yaw.
Поворотный шарнир
Сустав, который скручивается, качается или изгибается вокруг оси.
Векторный поворотный привод (RV)
Торговая марка устройства понижения скорости, которое преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости, обычно используемое на большой (большей) оси. См. Cyclo Drive и Harmonic Drive.
Вращательное движение
Сустав, который скручивается, качается или изгибается вокруг оси. Примером этого является локоть человеческой руки.
Гарантия
Барьерное ограждение, устройство или защитная процедура, предназначенные для защиты персонала. (R15.06)
Уровень полноты безопасности
Уровень полноты безопасности (SIL) — это метод IEC для определения уровня производительности системы безопасности. SIL 2 соответствует уровню эффективности ISO «d», а SIL 3 соответствует уровню эффективности ISO «e». ISO 10218 допускает использование того и другого.
Логическая схема безопасности
Логическая схема безопасности контролирует критически важные для безопасности внешние устройства, такие как световые завесы и генерируемые FSU сигналы.Логическая схема безопасности программируется через интуитивно понятный пользовательский интерфейс, поддерживаемый подвесным пультом программирования Yaskawa. Это позволяет настроить логические операции, такие как остановка манипулятора или выдача сигнала, если сервоприводы включены.
Остановка с контролем безопасности
Совместная функция, разработанная для обеспечения безопасного взаимодействия человека и робота. Только когда движение робота прекратится, безопасность человека перейдет в рабочее пространство для совместной работы. Сервоприводы могут оставаться под напряжением в соответствии с остановкой категории 2 в соответствии с ISO 10218-1: 2011, 5.4. Оценка риска должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Робот SCARA
Цилиндрический робот, имеющий два параллельных шарнирных соединения (горизонтально шарнирно сочлененных) и обеспечивающий податливость в одной выбранной плоскости. (ISO 8373) Примечание: SCARA является производным от селективно совместимой руки для роботизированной сборки
Вторая исходная позиция
Помимо «исходного положения» манипулятора, второе исходное положение можно настроить как контрольную точку для абсолютных данных.Начальное значение второго исходного положения — это исходное положение (где все оси находятся на импульсе 0). Вторую исходную позицию можно изменить.
Режим безопасности
Уровни режимов оператора на контроллерах роботов Yaskawa включают в себя: режим работы, режим редактирования, режим управления, режим безопасности и режим одноразового управления.
Датчик
Инструменты, используемые в качестве устройств ввода для роботов, которые позволяют ему определять аспекты, касающиеся окружающей среды робота, а также собственное позиционирование робота.Датчики реагируют на физические стимулы (такие как тепло, свет, звук, давление, магнетизм и движение) и передают результирующий сигнал или данные для измерения, управления или того и другого. (R15.06)
Сенсорная обратная связь
Переменные данные, измеряемые датчиками и передаваемые на контроллер в замкнутой системе. Если контроллер получает обратную связь, выходящую за пределы допустимого диапазона, значит, произошла ошибка. Контроллер отправляет роботу сигнал об ошибке.Робот вносит необходимые корректировки в соответствии с сигналом ошибки.
Сервоуправление
Процесс, с помощью которого система управления роботом проверяет, соответствует ли достигнутая поза робота позе, заданной при планировании движения, с требуемыми характеристиками и критериями безопасности. (ISO 8373)
Серводвигатель
Электроэнергетический механизм, используемый для движения или поддержания положения робота (например, двигатель, который преобразует электрическую энергию в движение робота) (R15.07). Двигатель реагирует на сигнал, полученный от системы управления, и часто включает энкодер для обеспечения обратной связи с контуром управления.
Сервопривод
Электроэнергетический механизм переменного тока, управляемый с помощью логики для преобразования энергии источника питания в форме синусоидальной волны в квадратную форму с широтно-импульсной модуляцией (ШИМ), подаваемую на двигатели для управления двигателем: скорость, направление, ускорение, замедление. и контроль торможения.
Робот с сервоприводом
Управление роботом с помощью сервосистемы с замкнутым контуром, в которой положение оси робота измеряется устройствами обратной связи и сохраняется в памяти контроллера.См. Замкнутую систему и Сервосистему.
Сервосистема
Система, в которой контроллер выдает команды на двигатели, двигатели приводят в движение рычаг, а датчик энкодера измеряет вращательные движения двигателя и сигнализирует о величине движения обратно контроллеру. Этот процесс повторяется много раз в секунду, пока рука не переместится в требуемую точку. См. Сервоуправляемый робот
Функция обнаружения удара
Обнаружение удара — это функция, поддерживаемая контроллером робота Yaskawa, которая снижает влияние столкновения робота путем остановки манипулятора без какого-либо внешнего датчика, когда инструмент или манипулятор сталкиваются с периферийным устройством.
Плечо
Первую или вторую ось робота иногда называют осью плеча, поскольку она чем-то напоминает человеческое плечо. Это часто используется при описании гуманоидных систем или систем с двумя руками, таких как Yaskawa Motoman® SDA10D.
SIL
См. Уровень полноты безопасности
Моделирование
Графическая компьютерная программа, представляющая робота и окружающую его среду, которая имитирует поведение робота во время имитации запуска робота.Это используется для определения поведения робота в определенных ситуациях, прежде чем фактически дать команду роботу выполнить такие задачи. Рассматриваются следующие элементы моделирования: 3D-моделирование окружающей среды, эмуляция кинематики, эмуляция планирования пути и моделирование датчиков. См. Сенсор, Прямая кинематика и Робот.
Сингулярность
Конфигурация, в которой два шарнира манипулятора робота становятся коаксиальными (выровненными по общей оси). В особой конфигурации плавное следование по траектории обычно невозможно, и робот может потерять управление.Термин происходит от поведения матрицы Якоби, которая становится сингулярной (т. Е. Не имеет обратной) в этих конфигурациях.
SLURBT
SLURBT — это термины, которые Yaskawa Motoman использует для описания каждой оси робота для удобства. Определение каждого значения следующее:
S — качели или вертлюги
L — нижний рычаг
U — Плечо
R — повернуть
B — Колено
Т — Твист
Функция настройки Softlimit
Функция настройки Softlimit — это функция для установки диапазона ограничения перемещения оси движения манипулятора в программном обеспечении.
Контроль скорости и разделения
Совместная функция, которая позволяет оператору и роботу работать в непосредственной близости друг от друга, гарантируя, что робот замедлится и остановится до возникновения ситуации контакта. Для безопасной реализации этой функции необходимо использовать функциональную безопасность и дополнительное оборудование для обнаружения. Оценка риска должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Шлицевой
Гладкая непрерывная функция, используемая для аппроксимации набора функций, которые однозначно определены на наборе подинтервалов. Аппроксимирующая функция и набор аппроксимируемых функций пересекаются в достаточном количестве точек, чтобы обеспечить высокую степень точности приближения. Назначение плавной функции — позволить роботу-манипулятору выполнить задачу без рывков.
Сплайн Тип движения
Расчетный путь, который выполняет робот, который может иметь параболическую форму.Сплайновое движение может также создавать кривую произвольной формы со смесью круглых и параболических форм.
Системный интегратор
См. Интегратор.
Обучение
Чтобы запрограммировать руку манипулятора, вручную направляя ее через серию движений и записывая положение в память контроллера робота для воспроизведения.
Блокировка обучения
Пока установлена блокировка обучения, режим работы привязан к режиму обучения, и машины не могут воспроизводиться ни с помощью [СТАРТ], ни с внешнего входа.В целях безопасности всегда устанавливайте переключатель режима в положение «ОБУЧЕНИЕ» перед началом обучения.
Режим обучения
Режим контроллера робота, в котором робот-манипулятор программируется путем ручного управления им через серию движений и записи положения в память контроллера робота для воспроизведения. Промышленные роботы, у которых нет активной функции ограничения мощности и усилия, требуют использования трехпозиционного переключателя включения в режиме обучения.
Подвеска Teach
Портативный блок управления, который используется оператором для удаленного управления роботом при выполнении его задач.Движения записываются системой управления роботом для последующего воспроизведения. Современные промышленные роботы поставляются с подвесками для программирования, которые не только позволяют обучать роботов, но также поддерживают полнофункциональное программирование роботов и безопасный пользовательский интерфейс.
Окно обучения
Окно обучения — это экран пользовательского интерфейса на пульте программирования. Это окно содержит окно СОДЕРЖАНИЕ ЗАДАНИЯ, и в этом окне проводится обучение. Окно СОДЕРЖАНИЕ ЗАДАНИЯ содержит следующие элементы: номера строк, курсор, инструкции, дополнительные элементы, комментарии и т. Д.
Балка проходная
Система обнаружения объектов, используемая в системе датчиков изображения робота. Точно сфокусированный луч света закреплен на одном конце, а детектор — на другом. Когда луч света прерывается, объект ощущается.
Функция измерения времени
Функция измерения времени измеряет время выполнения указанного раздела в задании или время вывода указанного сигнала.
Инструмент
Термин, используемый в широком смысле для определения рабочего устройства, установленного на конце манипулятора робота, такого как рука, захват, сварочная горелка, отвертка и т. Д.См. «Рука», «Захват» и «Рабочий орган».
Инструмент и рука Помехи
В системе с одним контроллером и несколькими манипуляторами можно использовать функцию проверки вмешательства инструмента и рычага для обнаружения возможных помех и предотвращения столкновения во время работы. Можно проверить следующие три шаблона:
Плечо против руки
Рычаг против инструмента
Инструмент против инструмента
Интерференция проверяется с помощью цилиндра, который немного больше, чем рычаг или инструмент.На обоих концах цилиндра помещается сфера. Если цилиндр и сферы одного манипулятора во время движения контактируют с цилиндрами другого манипулятора, манипуляторы останавливаются из-за обнаружения помех.
Центр инструмента (TCP)
Центральная точка инструмента (TCP) определяет вершину текущего инструмента, как определено относительно фланца инструмента. Например, для сварочного робота TCP обычно определяется на кончике сварочного пистолета. После определения и настройки TCP движение робота будет определено относительно этого кадра (т.е., вращение в направлении Rx вызовет вращение вокруг оси X, и позиции будут обучаться в этом кадре.
Контрольная точка инструмента
См. Центр инструмента
Координаты инструмента
Когда инструмент, прикрепленный к роботу, перемещается, его система координат инструмента движется вместе с фиксированной системой координат, например мировыми координатами. Как правило, координаты инструмента не совпадают с мировыми координатами XYZ.
Рама для инструмента
Система координат, прикрепленная к рабочему органу робота (относительно базовой рамы).
Датчик касания
Чувствительное устройство, иногда используемое с рукой или захватом робота, которое определяет физический контакт с объектом, тем самым давая роботу искусственное ощущение осязания. Датчики реагируют на контактные силы, возникающие между ними и твердыми предметами.
Построение траектории (расчет)
Вычисление функций движения, которые позволяют плавно контролировать движение суставов.
Преобразователь
Устройство, преобразующее энергию из одной формы в другую.Обычно это устройство, преобразующее входной сигнал в выходной сигнал другой формы. Его также можно рассматривать как устройство, которое преобразует статические сигналы, обнаруженные в окружающей среде (например, давление), в электрический сигнал, который отправляется в систему управления роботом.
Время работы
Период времени, в течение которого робот или производственная линия работают или готовы к работе, в отличие от времени простоя.
Настройка координат пользователя
Координаты пользователя определяются тремя точками, которые были обучены манипулятору с помощью осевых операций.Этими тремя определяющими точками являются ORG, XX и XY, как показано на диаграмме ниже. Эти три точки позиционных данных регистрируются в пользовательском файле координат. ORG — это исходное положение, а XX — точка на оси X. XY — это точка со стороны оси Y от пользовательских координат, которые были обучены, а направления осей Y и Z определяются точкой XY.
Пользовательская система координат
Пользовательская система координат — это любая контрольная точка, которую пользователь определил для своего приложения.Он часто прикрепляется к объекту, например к поддону, и позволяет пользователю обучать точкам относительно этого объекта. Например, набор положений может быть обучен относительно пользовательской системы координат, прикрепленной к поддону, а затем легко перенесен в другую пользовательскую систему координат на другом поддоне. Это позволяет эффективно повторно использовать позиции. См. Также «Настройка координат пользователя
Ручной вакуумный стакан
Конечный эффектор для манипулятора робота, который используется для захвата объектов легкого и среднего веса с помощью всасывания для манипуляций.К таким предметам может относиться стекло, пластик; и т. д. Обычно используется из-за его достоинств, заключающихся в уменьшении скольжения предмета, когда он находится в пределах досягаемости вакуумной чашки. См. «Концевой эффектор».
Визуальное сопровождение
Система управления, в которой траектория робота изменяется в ответ на ввод от системы технического зрения.
Датчик технического зрения
Датчик, который определяет форму, местоположение, ориентацию или размеры объекта с помощью визуальной обратной связи, например, телекамеры.
Рабочий конверт
Набор всех точек, до которых манипулятор может добраться без вторжения. Иногда форма рабочего пространства и положение самого манипулятора могут ограничивать рабочий диапазон.
Рабочий конверт (космос)
Объем пространства, в котором робот может выполнять поставленные задачи.
Исходное рабочее положение
Исходное рабочее положение является ориентиром для операций с манипулятором.Это предотвращает взаимодействие с периферийным устройством, гарантируя, что манипулятор всегда находится в пределах установленного диапазона в качестве предварительного условия для таких операций, как запуск линии. Манипулятор можно переместить в заданное рабочее исходное положение с помощью пульта программирования или ввода сигнала с внешнего устройства. Когда манипулятор находится в непосредственной близости от исходного рабочего положения, включается сигнал рабочего исходного положения.
Заготовка
Любая деталь, которая обрабатывается, совершенствуется или производится до того, как станет готовым продуктом.
Рабочее пространство
Объем пространства, в котором робот может выполнять поставленные задачи.
Мировые координаты
Справочная система координат, в которой рычаг манипулятора движется линейными движениями по набору декартовых или прямоугольных осей в направлениях X, Y и Z. Форма рабочего конверта образует прямоугольную фигуру. См. Прямоугольные координаты.
Мировая модель
Трехмерное представление рабочей среды робота, включая объекты, их положение и ориентацию в этой среде, которое хранится в памяти робота.Поскольку объекты обнаруживаются в окружающей среде, система контроллера робота постоянно обновляет модель мира. Роботы используют эту модель мира, чтобы определять свои действия для выполнения поставленных задач.
Запястье
Набор поворотных шарниров между манипулятором и рабочим органом робота, которые позволяют ориентировать рабочий орган по отношению к обрабатываемой детали. В большинстве случаев запястье может иметь степени свободы, которые позволяют ему захватывать объект с ориентацией по крену, тангажу и рысканью.См. «Рука», «Рабочий орган», «Крен», «Шаг», «Рыскание» и «Деталь».
Запястье [вторичная ось]
Набор взаимосвязанных звеньев и механических соединений между рычагом и рабочим органом, который поддерживает, позиционирует и ориентирует рабочий орган. (ISO 8373)
Рыскание
Вращение рабочего органа в горизонтальной плоскости вокруг конца руки манипулятора. Боковое движение по оси. Смотрите Roll and Pitch.
Роботизированная волна деформации (гармоническая) Коробка передач GSL Series
Роботизированные трансмиссии серии GAM GSL обеспечивают нулевой люфт и высокий крутящий момент в небольшой и легкой коробке передач для интеграции в машины и механизмы.Характеристики
- Применяется для коробок передач популярных конкурентов
- Зубчатая передача с деформационной волной (гармонической)
- Люфт ≤ 0,5 угл.мин (≤ 30 угл.сек)
- Высокая точность передачи
- Высокие передаточные числа на одной ступени: от 50: 1 до 160: 1
- Простая конструкция для интеграции в механизм или машину
- Высокая плотность крутящего момента при малой инерции
- Широкий выбор моделей и конфигураций
Модели серии GSL
Flexspline в форме чашки, стандартный ввод
- Чашечная гибкая линия с вводом ключей
- Доступен вход муфты Oldham (-B) для компенсации несоосности
- Размеры с 014 по 032
- Номинальный крутящий момент 7.От 9 до 248 Нм
- Технические характеристики и модели CAD
Flexspline в стиле шляпы, стандартный ввод
- Flexspline в виде шляпки со стандартным входным отверстием
- Доступен вход муфты Oldham (-B) для компенсации несоосности
- Размеры с 014 по 032
- Номинальный крутящий момент от 7,8 до 248 Нм
- Технические характеристики и модели CAD
Flexspline в стиле шляпы, полый вход
Flexspline Hat Style, вход вала
Базовый стиль шляпы с полым входом
Компактные / сверхтонкие редукторы
Flexspline в форме чашки, компактный дизайн
- Flexspline чашечного типа с более низким профилем и меньшим диаметром, чем коробка передач GSL-CS
- Размеры 014 и 017
- Номинальный крутящий момент 4.От 8 до 27 Нм
- Технические характеристики и модели CAD
Hat Style Flexspline, ультратонкий
Компоненты GSLC
В состав редукторов деформационных волн входят только Wave Generator , Flexspline , Circular Spline . Для легкой и полной интеграции в ваш механизм или машину.
Flexspline в форме чашки
- Компоненты с гибкой линией чашки
- Размеры с 014 по 032
- Номинальный крутящий момент 7.От 9 до 248 Нм
- Технические характеристики
Hat Style Flexspline
- Компоненты со шляпкой Flexspline
- Размеры с 014 по 032
- Номинальный крутящий момент от 7,9 до 248 Нм
- Технические характеристики
Чем отличается роботизированная КПП от АКПП? Робот или автомат: какая коробка лучше.
Современные автомобили оснащены коробками передач разных типов, и потребителю, особенно покупая свой первый автомобиль, сложно сделать правильный выбор среди этого разнообразия трансмиссий.
Поэтому в этой статье мы постараемся разобраться, чем коробка отличается от робота, именно этот вопрос беспокоит многих будущих автовладельцев.
Коробка автомат. Как известно, АКПП включает в себя два основных узла — это гидротрансформатор и коробка передач.Гидротрансформатор обеспечивает плавное и бесступенчатое переключение передач, фактически он работает вместо сцепления, которое есть на машинах с механической коробкой передач.
Редуктор автомата состоит из определенного набора шестерен, они входят в зацепление и образуют несколько ступеней: 4, 5, 6 и даже 8.
Благодаря конструктивным особенностям АКПП на основе ротора мотора и сброса давления масла сама переключает ступени (скорости), без вмешательства водителя.Благодаря такому переключению скоростей электроника сведена к минимуму.
CAT Робот Что это? Если так сказать, то блок управления ставился на МКПП, который состоит из гидропривода и сервопривода (электронного узла). Этот агрегат без вмешательства человека возглавляет сцепление и переключение передач.
Принцип работы робота как у механики, только все происходит автоматически — гидравлика с электронным управлением все сделает сама.
Чтобы лучше понять, чем автоматическая коробка передач отличается от роботизированной, рассмотрим их тактико-технические характеристики.
1. Автоматическая трансмиссия значительно снизила нагрузку на водителя при управлении автомобилем, особенно это заметно при движении в городских условиях. Современные автоматические коробки передач (адаптивные) способны даже адаптироваться под каждого водителя, под его стиль езды. Также автоматам свойственно мягкое и незаметное переключение скоростей.
Есть АКПП и минусы — это повышенный расход топлива, особенно в городе и ремонт машины, который иногда бывает, ляжет в приличную сумму.
2. Робот относится к механике, значит обслуживание и ремонт будет дешевле, чем автомат. Расход топлива у машины с коробкой с роботом приравнивается к МКПП, а в условиях города даже ниже, что не может не радовать. Более того, роботы едят масла меньше, чем автоматы.
Роботы передают крутящий момент от мотора на колеса машины без значительных потерь, чего не скажешь о машине. Большой плюс роботизированной коробки в том, что она поддерживает ручное переключение скоростей, чего нет у многих автоматов.
Есть у робота и минусы — это медленное переключение скоростей и толчки с рывками в работе коробки, бывает довольно часто, если водитель сильно давит на педаль газа. Также в городской черте при парковках рычаг селектора нужен для перевода в «нейтральное» положение.
А зачем это делать, вы можете узнать из этого видео, где рассказывается о коробке робота.
Подведем итог, чем машина отличается от робота:
- робот — механическая трансмиссия с блоком управления, машина заложена в его конструкции;
- при переключении передач автомат выигрывает у робота в скорости и плавности переключения;
- робот имеет ручное переключение, и многие машины имеют аналогичную функцию;
- робот-бокс потребляет меньше топлива и масел, чем машина;
- обслуживание и ремонт роботизированной коробки дешевле автоматической коробки.
Заключение. Мое мнение: робот — темная лошадка, от которой можно ожидать неприятных сюрпризов. Выбираю машину, она проработана и предсказуема в работе, тем более что новые автоматические коробки с большим набором передач приближаются по расходу топлива к механике, а также эти машины могут адаптироваться под каждого водителя.
Сегодня автомобиль — это такое необходимое устройство индивидуального пользования, как мобильный телефон, фотоаппарат или персональный компьютер. Большинство автолюбителей в процессе выбора новой машины не могут до конца понять, чем коробка передач отличается от машины, а также с трудом разобраться в технических особенностях и терминологии представленных их вниманию моделей.Автоматическая коробка передач скоро придет на смену механической, но мало кто знает о большом количестве их разновидностей и отличий. Однако об этом пока рано говорить, теперь необходимо разобраться, как действует механика робота, и что представляет собой классическая машина.
«Автомат» составляют два основных элемента:
- Это альтернатива сцеплению, используемому в классической коробке передач.
- Коробка передач состоит из зубчатых пар. Благодаря своей конструкции раскрывается особенность автоматической системы — возможность переключать скорости без помощи водителя.Механизм практически не оснащен электроникой.
«Робот» по своему принципу близок к механике, но имеет некоторые отличия. В его составе есть тип, состоящий из сервоприводов и гидроприводов, в основе которого лежат определенные алгоритмы. Коробка передач самостоятельно переключает систему трения сцепления, а также скорость, это позволяет водителю не вмешиваться в этот процесс.
Визуальное отличие «Машины» от «Робота»
Когда вы решили приобрести автомобили или уже сделали это, но не представляете, какой ящик переносится внутри, вам нужен ответ на вопрос, в чем разница между автоматикой и роботом, один и тот же лучше другого.Визуальная разница между этими двумя редукторами — роботом и пулеметом — ярко выражена. Все, что нужно — это обратить внимание на оформление канала передачи, они разные. Если вверху стоит такое положение, как Парковка — «П», то это коробка АКПП, когда такого положения нет, но есть нейтраль — «n», а также задняя «R», то вы работа с роботизированным устройством.
Принцип работы «автомата»
Коробка автомат-автомат состоит из двух частей (гидротрансформатор, коробка передач), о чем уже было сказано ранее.Теперь рассмотрим устройство и принцип работы коробки. Коробка передач создает усилие через систему передач, которые взаимодействуют друг с другом в различных вариациях. Именно благодаря этому положению меняется усилие. Гидротрансформатор отвечает за плавность переключения одной скорости на другую, он также отвечает за выполнение таких функций, как сцепление на механике.
Коробка автоматзначительно облегчает управление, позволяя водителю не нажимать педаль сцепления в постоянном режиме.Водителю не нужно переключать передачу рычагом и контролировать плавность хода, так как автоматика все делает за это. Благодаря этому у владельца автомобиля появляется множество способов полностью контролировать любую ситуацию на дороге (этим АКПП отличается от РЦПП). Гидротрансформатор как узел здесь намного надежнее, в отличие от коробки передач механической. Сломать его по неопытности практически невозможно. За счет этой детали снижается нагрузка на ходовую часть и силовой агрегат.
Ресурсы двигателя лучше экономятся за счет переключения скоростей с приемлемыми оборотами. Топливо расходуется более экономично за счет большого количества ступеней передаточного числа. Автомобиль никогда не поедет самостоятельно, стоя на склоне, так как установлен пассивный режим безопасности.
Помимо явных плюсов даже этот элемент управления нарисовал. Пулемет от робота отличается тем, что динамика увеличения скорости меньше во время езды.Менее экономичный расход топлива при относительно большом количестве передач. КПД КПД КПД значительно ниже из-за абсорбирующей части гидротрансформатора. Высокая стоимость единицы влияет на общую стоимость всего продукта. Обслуживание, замена запчастей, ремонт дороже.
Совет! Поскольку самой неэкономичной считается коробка с четырьмя ступенями переключения передач, при покупке автомобиля с автоматической коробкой передач отдавайте предпочтение меньшему количеству передач.
Во-первых, при наличии автоматической коробки передач в штатном режиме водителю не нужно выбирать и включать трансмиссию, работать педалью и т. Д. На практике это значительно упрощает процесс управления автомобилем, повышает комфорт и безопасность.
Что касается самих автоматических коробок, то сегодня «автоматом» в обиходе называют и (АМТ), и вариаторы. Другими словами, существует несколько вариантов АКПП, при этом по ряду причин среди них наиболее распространены АКПП и «роботы».
Читайте в этой статье
Чем отличается «робот» от «автомата»
Чтобы понять, чем один тип коробки передач отличается от другого, необходимо рассмотреть их особенности и принцип действия. Сразу отметим, что и «Автомат» (АКПП), и «робот» (RCPP, AMT) дают схожий конечный результат: трансмиссия автоматически выбирает и переключает трансмиссию при движении с учетом скорости движения ТК, нагрузка на двигатель, положение педали газа и Т..
Однако гидромеханическая автоматическая трансмиссия и роботизированная трансмиссия ГЦНП принципиально различаются по конструкции и принципу работы. Давайте рассмотрим их особенности и отличия более подробно.
- Начнем с «классического» гидромеханического «автомата» с. В отличие от робота, появившегося сравнительно недавно, обычный автомат появился давно и стал первым типом АКПП, который стал массово устанавливаться на автомобили.
В двух словах АКПП представляет собой ступенчатую коробку передач, в которой гидротрансформатор (ГДТ) играет роль сцепления. В этом случае GDT передается через трансмиссионную жидкость ATF.
Клапанная пластина () и компьютер АКПП могут отвечать за управление работой АКПП. Печка имеет специальные каналы, по которым под давлением подается трансмиссионная жидкость. Каналы перекрываются клапанами (). По команде ЭБУ клапан открывается или закрывается, соответственно открывая или перекрывая канал.
При открытом клапане жидкость ATF воздействует на коробку передач, что в результате позволяет автоматически включать и отключать трансмиссии.
Достоинства и недостатки АКПП. Если говорить о достоинствах и недостатках гидромеханической АКПП, то в списке основных достоинств необходимо выделить надежность агрегата и проверенную временем конструкцию, а также способность выдерживать достаточно большой крутящий момент.
Из минусов отметим, что хотя АКПП работает достаточно плавно, моменты АКПП все же заметны для водителя. Также переключение передач может быть «подтянутым», особенно на старых «автоматах». Также следует выделить большой расход топлива на автомобиле с данным типом трансмиссии.
Что касается ремонта, то в случае выхода из строя самой коробки и гидротрансформатора следует готовиться к серьезным расходам. При этом ремонтопригодность автоматических коробок вполне приемлема, большое количество СПО предоставляют услуги по ремонту.
- Роботизированная коробка передач изначально предназначена для достижения максимальной экономии топлива и комфорта при одновременном упрощении и удешевлении самого агрегата. В условиях мирового топливного кризиса и жестких экологических стандартов такое решение было призвано решить ряд проблем, присущих классическим гидромеханическим АКПП.
Проще говоря, коробка «робот», где привод вязаной муфты заменен электроприводом, а переключение передач выполняет исполнительный механизм.Электронный блок контролирует выбор и включение, а также включение и выключение сцепления.
Управление данными напоминает принцип действия уже известного неразъемного робота. Есть все те же сервоприводы, исполнительные механизмы и контроллер. Основное отличие состоит в том, что при включенной, например, второй передаче компьютер параллельно включает третью, удерживая сцепление «выжатым». Как только наступает время переключения, на доли секунды отключается вторая передача и включается заранее наполовину.
Во время езды блок управления коробкой оценивает действия водителя, учитывает скорость автомобиля, положение педали газа, нагрузку на двигатель и ряд других параметров для выбора наиболее подходящей трансмиссии применительно к конкретным условиям. .
- Плюсы и минусы «робота» с двойным хватом. Если говорить о преимуществах, то моменты переключения крутящего момента и вниз для водителя незаметны, максимальная скорость переключения позволяет добиться практически полного отсутствия отдачи мощности, разгон автомобиля происходит плавно и быстро.
Также сохранена максимальная топливная экономичность, присущая всем роботизированным КПП. При этом преселективные коробки наиболее экономичны на фоне всех остальных видов (неразъемный робот, АКПП, вариатор, механика).
Из минусов, во-первых, такие боксы достаточно сложные, автомобили с преселективными КПП отличаются высокой стоимостью. Информационный ресурс трансмиссий больше, чем у аналогов с одним сцеплением, но на практике он снижен по сравнению с классическим гидротрансформаторным автоматом трансмиссионным автоматом трансформируемым автоматом.
Если говорить о ремонтопригодности, то в ремонте DSG и аналогов других производителей можно отказаться довольно дорого. На практике стоимость таких работ и запчастей часто превышает качественное восстановление АТТ в рамках сложной переборки или КПП.
Подведем итоги
Как видно, каждый из рассмотренных типов АКПП имеет свои достоинства и недостатки. Также, если рассматривать автомат и роботизированный бокс, есть различия как в данных CAT, так и в принципах их работы.
Также перед покупкой автомобиля (особенно б / у) важно знать, какой тип коробки передач установлен, автомат или робот, как отличить эти типы коробок. Дело в том, что под общей концепцией АКПП на сегодняшний день может быть скрыт как первый, так и второй вариант.
Как правило, рекомендуется отдельно изучить информацию о конкретной модели автомобиля, для какого поколения и каких лет выпуска существует трансмиссия. Следует помнить, что визуально, например, DSG не отличить от обычной АКПП с типтроником.Другими словами, нужно знать, как отличить робота от машины на машине.
Напоследок отметим, что на вопрос однозначно ответить, робот и автомат, что достаточно лучше. Если речь идет о новых машинах с автоматом, то КПП лучше выбирать с учетом личных предпочтений и финансовых возможностей.
Как правило, автомобиль с однозначным роботом дешевле и экономичнее в плане расхода, однако комфорт при переключении передач по сравнению с классической АКПП может быть снижен.По этой причине оптимально перед покупкой протестировать модели с разными типами коробок передач.
В случае преселективных роботизированных боксов это классический автомат, который может показаться более «задумчивым», немного страдает комфортом при переключении передач, хуже динамикой разгона и т. Д.
Однако надежность гидротрансформаторной АКПП на практике выше, такую коробку зачастую проще и дешевле ремонтировать. Эти особенности стоит учитывать отдельно, особенно если планируется покупка подержанного автомобиля с автоматической коробкой передач.
Читайте также
Вождение автомобиля с АКПП: как пользоваться коробкой — автомат, режимы работы АКПП, правила использования данной трансмиссии, советы.
Количество разновидностей АКПП постоянно растет. Не так давно стало просто известно о существовании АКПП — стандартной версии машины с обычным гидротрансформатором.Чуть позже на автомобили начали активно ставить бесступенчатые вариаторы, а не так давно появились роботизированные коробки. Сегодня мы рассмотрим, чем отличается робот от машины в техническом и эксплуатационном плане, и каковы плюсы и минусы этих технологий. Сравнение двух разных типов ящиков часто помогает получить ценные данные для покупки различных машин.
В зависимости от предпочтений вашей коробки передач вы можете внести ясность в выборе модели при покупке автомобиля на новом транспортном рынке.Потому что сравнение технологий в коробках следует рассматривать с пониманием дела. Лучше всего тестировать автомобили с разными технологиями, чтобы иметь представление о возможностях и особенностях их эксплуатации.
Технические отличия робота от штатного автомата
В техническом плане эти типы трансмиссий совершенно разные. Автоматическая трансмиссия представляет собой конструкцию с гидротрансформатором, а также электроникой для управления поведением автомобиля.Гидротрансформатор играет главную роль в этом наборе устройств, осуществляя переключение передач в зависимости от числа оборотов. Такие особенности позволяют стабильно эксплуатировать автомобиль и рассчитывать на его определенную реакцию.
Роботизированная коробка передач по своей природе является механической, поэтому имеет ряд конкретных преимуществ механической коробки передач. Ящик более эластичный, имеет совершенно замечательный набор различных функций и обеспечивает экономичную поездку. Основные отличия робота от стандартной автоматической коробки следующие:
- принцип работы надежной МКПП, простота основного устройства;
- наличие большого количества электроники, управляющей сцеплением и переключением;
- возможности активного изменения дизайна конструкции, которые используют все мировые производители;
- экономия топлива за счет отсутствия прохождения и возможности раннего переключения передач;
- возможность быстрого изменения настроек роботизированной коробки, придавая персонажу;
- технологичность и современность конструкции, высокая надежность качественно выполненных узлов.
Конструкция стандартной АКПП также имеет определенные преимущества. Такая коробка более надежна, не ломается и не требует дорогостоящего ремонта электроники. Конечно, гидротрансформатор — далеко не самый надежный технологический узел в машине, но при правильной эксплуатации оказывается долговечным и служит не меньше двигателя.
Все эти особенности предполагают свой характер с обычной машиной и с роботизированной коробкой.Действительно, разница в конструкции — не единственное различие между этими двумя узлами. Ящики также работают с индивидуальными особенностями и создают определенные ощущения при разных режимах поездки.
Особенности практической эксплуатации робота и штатной АКПП
Роботизированный бокс в эксплуатации не требует никаких функций. Сегодня у брендовых роботов есть много уважающих себя забот, и часто производители дают индивидуальные рекомендации по использованию узлов.Например, роботов DSG от Volkswagen рекомендуется использовать на низких оборотах без применения спортивного режима.
КоробкиRobotic PowerShift от Ford лучше всего работают в среднем диапазоне оборотов, повышая не только эластичность реакций машины, но и расход топлива. Автоматическая трансмиссия, выполненная по стандартному образцу, может выполнять самые разные задачи и работать в различных условиях. Специфика использования такого узла следующая:
- не стоит слишком резко набирать обороты — это приведет к повышенной нагрузке на АКПП;
- следует избегать буксировки других автомобилей и тяжелых прицепов — работа коробки настраивается под вес автомобиля;
- при отсутствии нормального обслуживания придется менять целые узлы агрегата и прибегать к дорогостоящему ремонту;
- неисправности гидротрансформатора часто не зависят от эксплуатации — иногда они возникают неожиданно;
- работа агрегата достаточно стабильная, он часто реагирует на нажатие педали газа;
- часто в системах автоматов присутствует возможность KICK-DOWN — аварийного сброса скорости на пониженную для быстрого разгона.
Учитывая довольно известную работу АКПП, система довольно раздражает и не динамична. Полностью изменится характер машины с таким же двигателем на механической коробке и традиционной автоматической коробке передач. Часто покупатели таких автомобилей искренне удивляются вялой и не слишком динамичной поездки на очень мощных и объемных двигателях.
Однако штатная автоматическая коробка традиционного типа удерживает силовой агрегат от чрезмерного износа, ведь двигатели с пулеметами часто ходят намного дольше, чем с ручной коробкой или вариатором.Но АКПП дороже, потому что ее все чаще можно выбирать в конструкции дорогого элитного автомобиля, а не в комплектации бюджетного транспорта. О плюсах и минусах различных типов коробок передач смотрите в следующем видео:
Подведем итоги
Использование автоматических трансмиссий становится все более актуальным в наше время, ведь этот удобный элемент позволяет уделять больше внимания дороге и получать максимум экологической информации.Также любой тип АКПП удобен в пробках, где на ручной коробке приходится постоянно переключаться. Но современная обрабатывающая промышленность предпочитает более доступные узлы, например роботизированную коробку передач или вариатор.
Робот обходится производителю дешевле традиционного автомата, а в эксплуатации до 200 тысяч километров во многом показывает себя намного лучше конкурентов. Поэтому популярность этого типа контрольно-пропускных пунктов в последнее время сильно возросла.Есть ли у вас какие-то предпочтения по поводу использования той или иной АКПП?
Любой автолюбитель, задумываясь над вопросом покупки новой машины или машины с пробегом, решает задачу, с какой коробкой передач купить машину. И часто именно этот выбор ставит человека в тупик.
И если в вопросе выбора между автоматом и механикой все относительно ясно, то роботизированные коробки передач вызывают много вопросов у автолюбителей. Поэтому сегодня мы расскажем нашим читателям о том, чем робот отличается от машины, попробуем выяснить, что лучше: робот или машина.
Ведь необходимо учитывать все особенности автоматической и роботизированной коробки передач, их недостатки и достоинства. Какие отличия, условно говоря, робота и пулемета, их плюсы и минусы. И перед тем, как выбрать машину с коробкой, нужно все тщательно взвесить.
Автоматическая коробка передач
Автоматическая коробка передач состоит из двух основных модулей: гидротрансформатора и коробки передач. Основная функция гидротрансформатора — плавное переключение скоростей, а точнее плавное и без рывков переключение передач.В определенной степени гидротрансформатор выполняет функцию сцепления, которая есть на автомобилях с механической коробкой передач.
Коробка передач автоматической коробки передач имеет несколько пар шестерен, находящихся в зацеплении. Редуктор ACP имеет несколько ступеней: 4, 5, 6. И возможности разных по количеству ступеней ACP совершенно разные.
Преимущества AKP
ACP обеспечивает простое управление автомобилем. Не нужно выжимать и отпускать сцепление, не нужно думать о переключении передач, не нужно думать, как правильно двигаться с места.За все это отвечает автоматизация, освобождая водителя от внимания.
Если рассматривать гидротрансформатор как аналог сцепления, становится очевидным, что по сравнению с традиционным сцеплением вывести этот механизм так же быстро, как это происходит с классическим сцеплением в новых драйверах, невозможно.
ACP не создает таких нагрузок на двигатель, как это может происходить с механикой. Переключение скоростей происходит без увеличения количества оборотов. Таким образом, ресурс двигателя не расходуется.
За счет использования гидротрансформатора снижается нагрузка не только на двигатель, но и на ведущую часть автомобиля.
Автомобили с АКП имеют пассивную систему безопасности. Если автомобиль стоит на склоне, он не может повернуть.
Для шестиступенчатой АКП характерен меньший расход топлива.
Минусы АКП
Машины с АКП не обладают такой динамикой разгона, как на машинах с механикой.
На четырех- и пятиступенчатой АКП расход топлива значительный.Особенно это проявляется на четырехступенчатых автоматических коробках.
В целом автомобили, на которых установлена АКП, имеют меньший КПД. Это связано с тем, что в гидротрансформаторе происходят значительные потери от случайного перемещения.
Сама АКПП дорогая. Это не может не сказаться на общей стоимости автомобиля. К тому же ремонт и обслуживание АКП стоит дорого.
В ACP используется большой объем масла. И масло дорогое. И все это накладывает свой отпечаток на стоимость услуги.
Автомобиль, на котором установлена автоматическая коробка, менее динамичный. Те. Разгон на нем занимает намного больше времени, чем на механике или на автомобилях с роботизированной коробкой передач.
Есть некоторая инерция переключения. Те. Коробка автомат работает с небольшой задержкой.
Если начало движения происходит на склоне, может произойти определенный откат.
Роботизированная коробка переключения передач
Теперь, чтобы узнать, чем робот отличается от машины, разберем особенности, плюсы и минусы роботизированной коробки передач.
Все трансмиссии этого типа можно разделить на два типа. Первый вид роботизированной коробки передач предполагает, что по сути это механическая коробка передач с автоматическим управлением.
В такой коробке переключение передач осуществляется с помощью электроники. Таким образом, у такого устройства нет традиционного сцепления. Одновременно с переключением трансмиссии с помощью автоматики переключение может происходить в ручном режиме, как на обычной механике. В этом случае на автомобиль устанавливается сцепление.
Для таких редукторов характерно прерывание крутящего момента, поэтому при переключении скоростей возможны сбои.
Второй тип роботизированных ящиков более совершенен. Такие коробки передач используются в автомобилях спорт-класса. Именно на тех машинах, которые участвуют в гонках. Специфика таких роботизированных коробок в том, что за разные трансмиссии отвечают две системы сцепления. За счет наличия двух систем сцепления и прямого включения, максимальная скорость переключения передач. Это очень важно в спорте.
Плюсы роботизированных коробок передач
Если рассматривать первый тип роботизированных коробок передач, то их недостатков оказывается намного больше, чем достоинств.Система достаточно сырая.
Но, тем не менее, у нее есть свои преимущества по сравнению с АКП.
Роботизированные коробки передач более экономичны по сравнению с АКП. Их экономичность находится на одном уровне с механическими ящиками.
Роботизированный бокс дешевле АКП, к тому же дешевле в обслуживании и ремонте. Потребляет меньше масла, чем ACP.
Вес роботизированных ящиков меньше, чем ящик-автомат.
На рулевом колесе можно использовать специальные системы переключения передач, которые позволяют очень быстро переключать скорости.Таким образом, динамика у машины намного выше, чем у машин с автоматами.
Минусы Роботизированные коробки передач
По сравнению с ABP переключение скоростей не такое плавное. Дергание автомобиля при переключении очень заметно.
После включения нужной передачи и начала ее выполнения существует определенная задержка.
Практически любая остановка требует переключения рычага в нейтральное положение, чего нет в автомобилях с автоматической коробкой передач.
Любые проскальзывания при движении негативно сказываются на ресурсе роботизированной коробки передач.Те. Такой ящик больше всего подходит для твердых дорожных покрытий.
При старте движения происходит некий откат. Хотя маленький.
Определенные выводы
Таким образом, на вопрос, что лучше робота или машины, однозначного ответа быть не может. Если бы один вариант был однозначно хуже другого, производители выпускали бы автомобили с коробкой передач только одного типа. Другое дело, что вопрос выбора КП индивидуален, и каждый автомобилист решает его самостоятельно, опираясь на свои представления об удобстве и комфорте управления автомобилем.
.