1.2 Устройство роботизированной коробки передач
Роботизированная коробка передач DSG (Direct Shift Gearbox) является в настоящее время самой совершенной автоматизированной коробкой, устанавливаемой на массовые модели легковых автомобилей.
Коробка DSG обеспечивает переключение передач без разрыва потока мощности, что значительно повышает ее потребительские качества по сравнению с другими «роботами».
Непрерывная передача крутящего момента от двигателя к ведущим колесам достигнута за счет применения двух сцеплений и соответствующих им двух рядов передач. Коробка передач DSG имеет шестиступенчатую и семиступенчатую конструкции. Семиступенчатая коробка (крутящий момент до 250 нм) устанавливается на легковые автомобили B, C и некоторые модели D класса. Шестиступенчатая коробка передач передает крутящий момент до 350 нм и устанавливается на более мощных машинах.
Рисунок 1 — Коробка передач DSG имеет следующее устройство
· двойное сцепление;
· первый ряд передач;
· второй ряд передач;
· главная передача;
· дифференциал;
· система управления коробкой передач;
·
корпус (картер) коробки.
Рисунок 2 — Схема роботизированной коробки передач DSG: 1 — двухмассовый маховик; 2 — первая фрикционная муфта; 3 — вторая фрикционная муфта; 4 — ведомая шестерня главной передачи; 5 — ведомая шестерня 2 передачи; 6 — первичный вал второго ряда; 7 — ведомая шестерня 4 передачи; 8 — ведомая шестерня 3 передачи; 9 — ведомая шестерня 1 передачи; 10 — вторичный вал 1; 11 — вал масляного насоса; 12 — масляный насос; 13 — вторичный вал 2; 14 — ведомая шестерня 5 передачи; 15 — ведомая шестерня 6 передачи; 16 — ось шестерни заднего хода; 17 — шестерня заднего хода; 18 — первичный вал первого ряда; 19 — сдвоенное сцепление
Двойное сцепление обеспечивает передачу крутящего момента на первый и второй ряды передач. Сцепление включает ведущий диск, соединенный через входную ступицу с маховиком, и две фрикционные многодисковые муфты, связанные через главную ступицу с рядами передач.
На
шестиступенчатой коробке передач
двойное сцепление «мокрого» типа, т.е.
постоянно находится в масле. Семиступенчатая
коробка имеет сухое сцепление, что
позволяет значительно уменьшить объем
заправляемого масла (с 6.5 л до 1.7 л),
снизить энергозатраты и повысить
топливную экономичность двигателя. С
этой же целью на семиступенчатой коробке
масляный насос с гидравлическим приводом
заменен на более экономичный электрический
насос.
Семиступенчатая
коробка имеет сухое сцепление, что
позволяет значительно уменьшить объем
заправляемого масла (с 6.5 л до 1.7 л),
снизить энергозатраты и повысить
топливную экономичность двигателя. С
этой же целью на семиступенчатой коробке
масляный насос с гидравлическим приводом
заменен на более экономичный электрический
насос.
Первый ряд коробки обеспечивает работу нечетных передач и заднего хода, второй ряд отвечает за четные передачи. Каждый из рядов передач представляет собой первичный и вторичный валы с блоками шестерен. Первичные валы расположены соосно, при этом первичный вал второго ряда выполнен полым и надет на первичный вал первого ряда.
Шестерни
на первичных валах имеют жесткое
соединение с валом. Шестерни вторичных
валов вращаются свободно. При этом
шестерни первичного и вторичного валов
находятся в постоянном зацеплении.
Между шестернями вторичного вала
расположены муфты синхронизаторов,
которые осуществляют включение конкретной
передачи. Для выполнения реверсивного
движения в коробке передач предусмотрен
промежуточный вал с шестерней заднего
хода.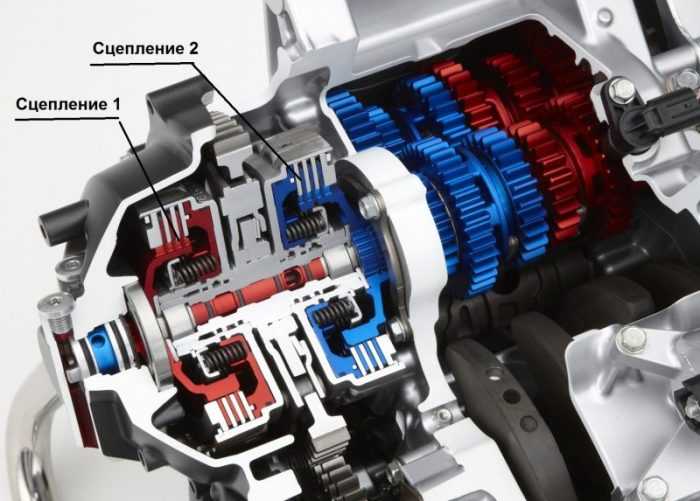
Для управления сцеплением и переключения передач предназначена система управления коробкой передач. Система управления включает:
· входные датчики;
· электронный блок управления;
· электрогидравлический блок управления;
· исполнительные механизмы.
Электронный и электрогидравлический блоки управления, а также практически все входные датчики, объединены в единый модуль, имеющий название Mechatronic. Модуль управления располагается непосредственно в картере коробки передач.
Входные датчики отслеживают частоту вращения на входе и выходе коробки передач, давление и температуру масла, а также положение вилок включения передач. Электронный блок управления на основании сигналов датчиков реализует, заложенный в него, алгоритм управления коробкой передач.
Электрогидравлический блок управления обеспечивает работу гидравлического контура управления коробкой передач. В него входят следующие элементы:
· золотники-распределители;
· электромагнитные клапана;
· клапана регулирования давления;
·
мультиплексор.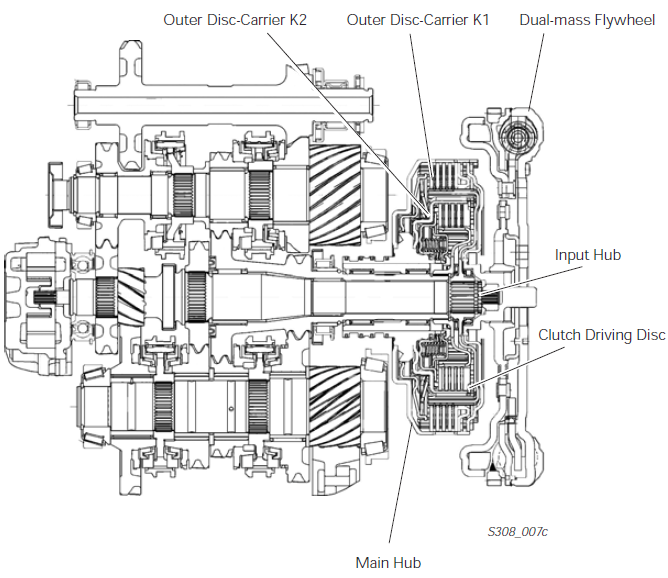
Золотники-распределители приводятся в действие рычагом селектора. Электромагнитные клапаны осуществляют переключение передач. Клапаны регулирования давления обеспечивают работу фрикционных муфт. Электромагнитные клапаны и клапаны регулирования давления являются исполнительными механизмами системы управления коробкой передач.
В коробке применено устройство мультиплексор, которое позволяет управлять восьмью гидроцилиндрами переключения передач только с помощью четырех электромагнитных клапанов. В исходном положении мультиплексора работают одни гидроцилиндры, в рабочем — другие, при этом в обоих режимах общие электромагнитные клапаны.
Роботизированные коробки передач.
Роботизированная коробка передач (РКПП, или робот) представляет собой механическую КПП, в которой функция переключения передач возлагается на сервопривод, управляемый электронным блоком управления.
Этот тип коробок передач можно отнести к автоматическим, поскольку водитель освобождается от необходимости самостоятельного выбора передач и их ручного переключения.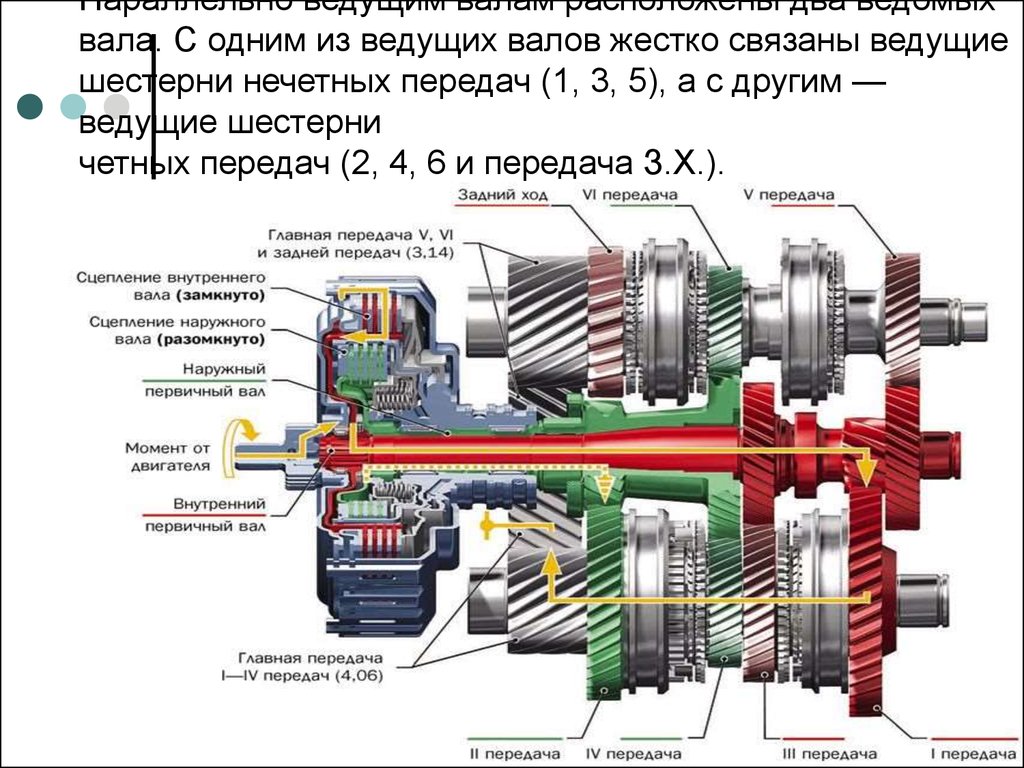
Автомобиль, оборудованный роботизированной коробкой передач, не имеет педали сцепления, поскольку управление сцеплением полностью возлагается на автоматический сервопривод.
Блок управления (ЭБУ) коробки передач может быть самостоятельным, либо совмещенным электронной системой управления двигателем (ЭСУД).
Актуаторы переключения передач и управления сцеплением могут быть с гидравлическими или электрическими исполнительными механизмами, и управлять однодисковым или двухдисковым сцеплением.
Гидравлические исполнительные механизмы работают благодаря давлению жидкости (масла), которое создается в системе специальным гидронасосом, т.
Гидравлический привод имеют следующие конструкции коробок передач: ISR (Independent Shifting Rods) (Lamborghini), SMG (BMW), Quickshift (Renault), R-Tronic (Audi), Selespeed (Alfa Romeo).
Электрические исполнительные механизмы чаще всего используют для работы портативные электродвигатели постоянного тока, которые также воздействуют на конечное звено сервопривода через рычаги и зубчатые передачи. Однако в актуаторах сцепления обычно используется комбинированный электрогидравлический сервопривод, в котором электродвигатель через систему рычагов и передач воздействует на главный цилиндр сцепления, а дальше усилие передается рабочему цилиндру рабочей жидкостью гидропривода.
Электрический привод отличает относительно невысокая скорость работы (время переключения передач 0,3-0,5 с) и меньшее энергопотребление. Гидравлический привод предполагает постоянное поддержание давления в гидросистеме посредством насоса, который отнимает энергию у двигателя, однако он более быстрый при переключении передач, способствуя динамике разгона автомобиля. Эти качества и определяют область применения «роботов» с электрическим приводом на бюджетных автомобилях, с гидравлическим приводом – на более дорогих моделях машин.
Электрическим приводом оснащаются следующие конструкции коробок передач:
Актуатор управления сцеплением имеет электронную связь с педалью тормоза – нажатие на эту педаль приводит к выключению сцепления, которое затем включается при отпущенной тормозной педали.
Актуатор переключения передач коробки-робота содержит, чаще всего, два привода – один управляет перемещением рычагов выбора передачи по горизонтали (или вертикали), другой – поворачивает рычаги и валы вдоль оси в ту или иную сторону.
Согласование работы отдельных элементов управления роботизированной коробкой передач осуществляет ЭБУ, программа которого управляется многочисленными датчиками, устанавливаемыми в приводе (различные датчики положения и скорости).
При управлении автомобилем с роботизированной коробкой передач водитель нажимает на педаль тормоза, запускает двигатель, и устанавливает вручную первую (или заднюю – обозначение «R») передачу в автоматическом режиме (обозначение режима — «А», «Е» или «D»).
При отпускании педали тормоза и нажатии на акселератор автомобиль начинает движение в выбранном направлении. По мере нарастания скорости автомобиля автоматика переключает передачи на более высокие, и наоборот – по мере снижения скорости происходит включение более низких передач.
Роботизированные коробки могут использоваться и в ручном режиме (режим «М»), т. е. водитель может самостоятельно управлять переключением передач (значки «+» и «-»).
Включенная нейтральная передача обычно высвечивается значком «N» на щитке приборов.
По сравнению с гидромеханической АКПП роботизированная коробка передач имеет ряд преимуществ, которые сказываются, в первую очередь, на динамике и экономичности автомобиля. Автомобиль с роботом разгоняется, как правило, резвее, чем с АКПП. Кроме того, роботизированная коробка передач обеспечивает экономию топлива примерно на 25% в сравнении с гидравлическими АКПП, и значительно дешевле в обслуживании и ремонте.
К недостаткам РКПП можно отнести необходимость в периодических настройках сцепления по мере износа диска (или дисков) сцепления, а также более жесткое переключение передач по сравнению с АКПП. При движении в пробках и при неграмотном управлении роботизированная коробка быстрее изнашивается, а ее актуаторы могут сбиться с настроек.![]() Тем не менее, по мере усовершенствования конструкции актуаторов и применению современных технологий и программного обеспечения, роботизированные коробки передач все чаще встречаются на легковых автомобилях разных производителей.
Тем не менее, по мере усовершенствования конструкции актуаторов и применению современных технологий и программного обеспечения, роботизированные коробки передач все чаще встречаются на легковых автомобилях разных производителей.
Ниже приведен видеоролик, в котором подробно поясняется принцип работы роботизированной коробки перемены передач.
***
***
Ступенчатые коробки передач
Главная страница
- Страничка абитуриента
Дистанционное образование
- Группа ТО-81
- Группа М-81
- Группа ТО-71
Специальности
- Ветеринария
- Механизация сельского хозяйства
- Коммерция
- Техническое обслуживание и ремонт автотранспорта
Учебные дисциплины
- Инженерная графика
- МДК.
 01.01. «Устройство автомобилей»
01.01. «Устройство автомобилей» - Карта раздела
- Общее устройство автомобиля
- Автомобильный двигатель
- Трансмиссия автомобиля
- Рулевое управление
- Тормозная система
- Подвеска
- Колеса
- Кузов
- Электрооборудование автомобиля
- Основы теории автомобиля
- Основы технической диагностики
- Основы гидравлики и теплотехники
- Метрология и стандартизация
- Сельскохозяйственные машины
- Основы агрономии
- Перевозка опасных грузов
- Материаловедение
- Менеджмент
- Техническая механика
- Советы дипломнику
Олимпиады и тесты
- «Инженерная графика»
- «Техническая механика»
- «Двигатель и его системы»
- «Шасси автомобиля»
- «Электрооборудование автомобиля»
Роботы SuperDroid — мотор-редукторы постоянного тока, мотор-редукторы, моторы-роботы
Выбирайте из широкого выбора мотор-редукторов! Если вам нужен высокий крутящий момент, быстрый робот или вам нужно перемещать тяжелые грузы, вы можете найти нужный вам мотор-редуктор здесь!
DAGU Редукторный двигатель, колесо и пара энкодера
Новый простой комплект двигателя и энкодера от DAGU сочетает в себе недорогие, надежные энкодеры и мощн. .
.
Код продукта: TD-120-002
28 41,42 доллара США
IG32 12 В постоянного тока 053 об/мин Редукторный двигатель
Щеточный двигатель постоянного тока с постоянными магнитами Переменная скорость и реверсивный Планетарная коробка передач ..
Код продукта: TD-070-053
Ограничение 12 на одного клиента Свяжитесь с нами для большего количества.
$35,53
Редукторный двигатель IG32 12 В постоянного тока, 104 об/мин
Двигатель постоянного тока с щеточным постоянным магнитом Переменная скорость и реверсивный Планетарная коробка передач Final..
Код продукта: TD-070-104
Ограничение 12 на одного клиента Свяжитесь с нами для большего количества.
32,27 доллара США
Редукторный двигатель IG32 12 В постоянного тока, 197 об/мин
Двигатель постоянного тока с щеточными постоянными магнитами Переменная скорость и реверсивный Планетарная коробка передач Final..
Код продукта: TD-070-197
Ограничение 12 на одного клиента Свяжитесь с нами для большего количества.
$34,66
IG32 24 В пост. тока, 074 об/мин, мотор-редуктор
Двигатель постоянного тока с щеточными постоянными магнитами Переменная скорость и реверсивный Планетарная коробка передач Final..
Код продукта: TD-014-074
Ограничение 12 на одного клиента Свяжитесь с нами для большего количества.
$34,03
IG32 24 В постоянного тока, 074 об/мин, мотор-редуктор с энкодером
Двигатель постоянного тока с щеточным постоянным магнитом Переменная скорость и реверсивный Планетарная коробка передач Final..
Код продукта: TD-054-074
Ограничение 12 на одного клиента Свяжитесь с нами для большего количества.
43,57 доллара США
Редукторный двигатель IG32 24 В пост. тока, 191 об/мин
Двигатель постоянного тока с щеточными постоянными магнитами Переменная скорость и реверсивный Планетарная коробка передач Final..
Код продукта: TD-014-191
Ограничение 12 на клиента Свяжитесь с нами для большего количества.
30,43 доллара США
IG32 24 В постоянного тока, 191 об/мин, мотор-редуктор с энкодером
Двигатель постоянного тока с щеточными постоянными магнитами Переменная скорость и реверсивный Планетарная коробка передач Final..
Код продукта: TD-054-191
Ограничение 12 на одного клиента Свяжитесь с нами для большего количества.
$38,08
Разъем IG32
Разъем для двигателей IG32 с энкодерами…
Код продукта: TE-305-001
59 В наличии
0,86 доллара США
IG32 Прямоугольный мотор-редуктор 12 В пост. тока, 010 об/мин Переменная скорость и реверсивный Планетарная коробка передач ..
Код продукта: TD-035-010
Ограничение 12 на клиента Свяжитесь с нами для большего количества.
$67,19
IG32 Прямоугольный мотор-редуктор 12 В пост. тока, 043 об/мин Переменная скорость и реверсивный Планетарная коробка передач следует ..
Код продукта: TD-035-043
Ограничение 12 на одного клиента Свяжитесь с нами для получения большего количества.
$65,63
IG32 Прямоугольный мотор-редуктор 12 В пост. тока, 043 об/мин с энкодером Переменная скорость и реверсивный Планетарная коробка передач ..
Код продукта: TD-282-043
Ограничение 12 на клиента Свяжитесь с нами для большего количества.
$74,76
IG32 Прямоугольный мотор-редуктор 12 В пост. тока, 060 об/мин
Двигатель постоянного тока с щеточными постоянными магнитами Переменная скорость и реверсивный Планетарная коробка передач следуют ..
Код продукта: TD-035-060
Ограничение 12 на одного клиента Свяжитесь с нами для большего количества.
$65,63
IG32 Прямоугольный мотор-редуктор 12 В пост. тока, 083 об/мин Переменная скорость и реверсивный Планетарная коробка передач ..
Код продукта: TD-035-083
Ограничение 12 на клиента Свяжитесь с нами для большего количества.
$65,20
IG32 Прямоугольный мотор-редуктор 12 В пост. тока, 083 об/мин с энкодером Переменная скорость и реверсивный Планетарная коробка передач следуют .
 .
.Код продукта: TD-282-083
Ограничение 12 на одного клиента Свяжитесь с нами для большего количества.
$74,76
IG32 Прямоугольный мотор-редуктор 12 В пост. тока, 116 об/мин
Двигатель постоянного тока с щеточными постоянными магнитами Переменная скорость и реверсивный Планетарная коробка передач за..
Код продукта: TD-035-116
Ограничение 12 на клиента Свяжитесь с нами для большего количества.
$65,20
Выбор и расчет двигателя (и редукторов)
от Дэвид Коханбаш на 31 марта 2014 г.
Привет всем
Выбор двигателя является важной задачей при проектировании робота. В предыдущем посте мы обсудили различные типы двигателей и варианты обратной связи, а также способы управления этими двигателями. В этом посте мы сосредоточимся на том, как определить размер вашего двигателя и выбрать правильную передачу.
На основном изображении выше. Слева есть планетарная и гармоническая передача с муфтой для их соединения. На правом изображении бесколлекторный двигатель с резольвером сзади (откуда идут провода).
На правом изображении бесколлекторный двигатель с резольвером сзади (откуда идут провода).
Первым шагом при выборе двигателя является определение условий его работы и максимальных условий, в которых будет работать двигатель.
Робот/приводимая в действие масса
Нам нужно знать массу нагрузки/марсохода, чтобы определить крутящий момент для выбора двигателя. Получение оценки массы (или, что еще лучше, фактической массы) имеет решающее значение для выбора двигателя. Если вы проектируете на основе оценки массы, вы должны применять хороший запас для массового раздувания. Вы можете посмотреть на Постоянная крутящего момента из технического паспорта двигателя, чтобы выяснить, какой крутящий момент вы получите на ампер.
Скорость
После определения требуемой силы/крутящего момента следующим шагом будет определение скорости вращения колеса. Сначала нужно определить желаемую скорость колеса (т.е. конечную мощность), а уже потом можно приступать к выбору моторов и редуктора.
Форм-фактор
После того, как вы узнали основные характеристики двигателя, который вам нужен, следующим шагом будет убедиться, что комплект двигателя (энкодер + тормоз + двигатель + редуктор) подходит для вашего робота и может быть аккуратно упакован в ваш робот .
Напряжение
Какое рабочее напряжение можно использовать для питания двигателя. Как правило, чем выше напряжение, тем выше скорость двигателя. Вы можете посмотреть на Voltage Constant из технического паспорта двигателя, чтобы выяснить, как быстро вы будете работать на вольт.
Температура
Часто это не проблема, но если ваш двигатель закрыт, вы должны убедиться, что он не перегревается. Также нужно побеспокоиться о температурном диапазоне смазки коробки передач (дополнительную информацию см. ниже).
Стоимость
Стоимость. Нужно ли мне сказать больше.
На самом деле скажу больше. Иногда может возникнуть соблазн построить коробку передач с нуля, так как это дешевле. Однако, если вы потратите время на проектирование, сборку и тестирование новой передачи, зачастую дешевле просто купить коробку передач. Вы также получаете дополнительную надежность, когда покупаете коробку передач у надежной компании.
Однако, если вы потратите время на проектирование, сборку и тестирование новой передачи, зачастую дешевле просто купить коробку передач. Вы также получаете дополнительную надежность, когда покупаете коробку передач у надежной компании.
Точность и аккуратность
Сколько неряшливости вы можете себе позволить в своей передаче? Часто в колесных двигателях вы можете справиться с немного меньшей точностью и аккуратностью. Однако в роботизированном манипуляторе или инструменте часто требуются системы с малым люфтом, которые являются точными и точными.
Диаметр колеса
Последнее важно для определения требуемого крутящего момента для приводного двигателя. Мы увидим больше об этом в следующем разделе. Помните, что чем больше колесо, тем больше вы проедете за каждый оборот колеса.
Как правило, проще всего определить требуемый выходной крутящий момент и работать в обратном порядке, чтобы найти свой двигатель и редуктор. Я игнорирую инерцию, которая может помочь ограничить требуемый крутящий момент в некоторых случаях.![]() Хорошо игнорировать инерцию (во многих случаях), чтобы быть консервативным. Почти во всех случаях вы должны добавить коэффициент безопасности сверх того, что вы рассчитываете.
Хорошо игнорировать инерцию (во многих случаях), чтобы быть консервативным. Почти во всех случаях вы должны добавить коэффициент безопасности сверх того, что вы рассчитываете.
Для определения требуемого крутящего момента для вашего робота существует несколько подходов. Первое — это «правило Реда», которое гласит, что тяги каждого обода колеса (насколько колесо может тянуть) должно быть достаточно, чтобы тянуть всего робота. Хотя это может позволить роботу работать, если некоторые приводы выходят из строя (или проскальзывают), он также может разорвать робота на части, если каждое колесо тянет в другом направлении. Другая проблема с этим подходом заключается в том, что даже если ваши двигатели могут создавать такой большой крутящий момент, часто не хватает трения, чтобы колеса могли набирать тягу и работать.
Второй подход заключается в разработке робота с достаточным крутящим моментом, чтобы взобраться на стену. Это имитирует восхождение на самый экстремальный склон и / или ступенчатое препятствие с меньшей возможной опасностью для робота и без полного перебора и перепроектирования системы мобильности. Возможно, предположим, что numberOfWheels=numberOfWheels/2
Возможно, предположим, что numberOfWheels=numberOfWheels/2
Общий случай расчета крутящего момента на колесо, необходимого для робота:
Чтобы получить удерживающий момент на колесо на плоской поверхности, это упрощается до:
Если вы следуете правилу Рэда, то вы не будете делить на количество колес.
Еще один аспект – это не просто подъем по склону, а преодоление ступенчатого препятствия. Чтобы вычислить это, вы можете консервативно упростить задачу, решив момент, когда препятствие пересекает колесо робота. Если вы хотите имитировать подъем на стену, вы можете установить перехват препятствия на радиус колеса.
Вам нужно выбрать, хотите ли вы использовать метод уклона или метод ступенчатого препятствия на основе вашей системы. Для полевого робота я бы посмотрел на наклон и удерживающий момент на плоской поверхности. Для внутреннего робота вы можете рассмотреть более мелкие препятствия и использовать описанную выше штуку с перехватом колеса.
Примеры кривых, показывающих хорошие, средние и плохие кривые для двигателя. На лучшей кривой он может поддерживать крутящий момент в широком диапазоне скоростей с падением в конце диапазона. В то время как в плохом двигателе крутящий момент резко уменьшается со скоростью, обеспечивая высокий удерживающий крутящий момент, но плохие характеристики крутящего момента при вращении.
Как только вы узнаете требуемый крутящий момент, вы можете приступить к просмотру кривых крутящего момента и скорости, приведенных в паспорте двигателя. Чтобы выбрать двигатель и соответствующий редуктор, вы можете начать строить матрицу различных вариантов, чтобы соответствовать требуемому крутящему моменту и скорости. Рекомендуется создать кривые крутящего момента и скорости для каждого из окончательных вариантов.
Для создания новых/окончательных кривых крутящего момента и скорости используйте
Каждый тип шестерни имеет разную эффективность, которая может меняться в зависимости от скорости.
Чтобы определить мощность двигателя (поскольку некоторые контроллеры двигателей рассчитаны на выходную мощность), найдите точку на кривой крутящего момента и скорости, с которой вы работаете, и это точка вашей мощности. Итак,
. Планетарные передачи
– КПД выше, чем у гармоник, в некоторых случаях может превышать 90 %
– Более низкая стоимость по сравнению с другими вариантами редуктора
— понижающая передача в зависимости от типоразмера
— подходит для высокоскоростных приложений с низким крутящим моментом
Во многих случаях в одной системе используется несколько типов зубчатых передач. Например, в гармонических приводах с низкой входной скоростью обычно устанавливается планетарная ступень привода между ним и двигателем, чтобы уменьшить общую входную скорость.
В коробках передач используются два основных типа смазки, вот они:
Смазка
– Easy, вариант по умолчанию
– Может ограничивать скорость двигателя
– Установил и забыл – не нужно доливать смазку
– Может не допускать попадания грязи в редуктор (он должен быть герметизирован и в этом нет необходимости)
Масло
– Уровни следует проверять и время от времени доливать.
– Возможна более высокая скорость.
– Снижение эффективности по сравнению со смазкой.
Со всеми этими вариантами полезно поговорить с производителем, чтобы получить его совет. Также существует множество различных типов смазок, которые можно использовать для получения различных свойств (например, термических).
– Убедитесь, что муфта двигателя с коробкой передач выдерживает небольшое биение (эксцентриситет) вала двигателя.
– Подумай, как передать крутящий момент от моторного стека на колесо. Например, двигатель может иметь только один вал, в то время как гармонический привод имеет круглую пластину с несколькими точками крепления болтов
.