Дифференциальный привод
Авторы патента:
Щепин В.Д.
Кудрявцев И.А.
Садовин С.Н.
F16h4/72 — с вторичным приводом, например с регулирующим двигателем для непрерывного изменения скорости
Изобретение относится к машиностроению, в частности к приводам. Дифференциальный привод содержит по меньшей мере два приводных двигателя и по меньшей мере одну волновую дифференциальную передачу. Волновая передача содержит генератор волн, гибкое и подвижное жесткое колеса и выходное звено. Один из приводных двигателей взаимодействует с внутренним зубчатым венцом генератора волн при помощи паразитных шестерен. Подвижное жесткое зубчатое колесо связано с выходным звеном непосредственно. Другой приводной двигатель соединен с гибким колесом волновой передачи посредством зубчатой муфты. Технический результат — обеспечение широкого диапазона регулирования скорости выходного звена за счет суммирования или вычитания угловых скоростей вращения приводных двигателей, сокращение времени переходных процессов при пуске, торможении и реверсировании двигателей. 1 ил.
1 ил.
Изобретение относится к области машиностроения, в частности к приводам.
Известен дифференциальный привод, содержащий два двигателя, две дифференциальные передачи, связанные зубчатые передачами, и корпус. Дифференциальные передачи выполнены планетарными (Волков Д. П., Крайнев А. Ф. Трансмиссии строительных и дорожных машин. — М.: Машиностроение, 1974, с. 311, рис. 105 ж).
Недостатками известного привода являются невысокие точностные характеристики и значительные габаритные размеры, обусловленные использованием обычных цилиндрических зубчатых передач.
Известен также дифференциальный привод (Крайнев А. Ф. Словарь-справочник по механизмам, 1987, с. 55, рис. н), содержащий два параллельно расположенных двигателя, приводной вал одного из которых связан с генератором волн волновой передачи, взаимодействующим с гибким зубчатым колесом, жестко связанным с выходным звеном, а приводной вал другого находится в зацеплении с наружным зубчатым венцом жесткого колеса при помощи цилиндрической шестерни.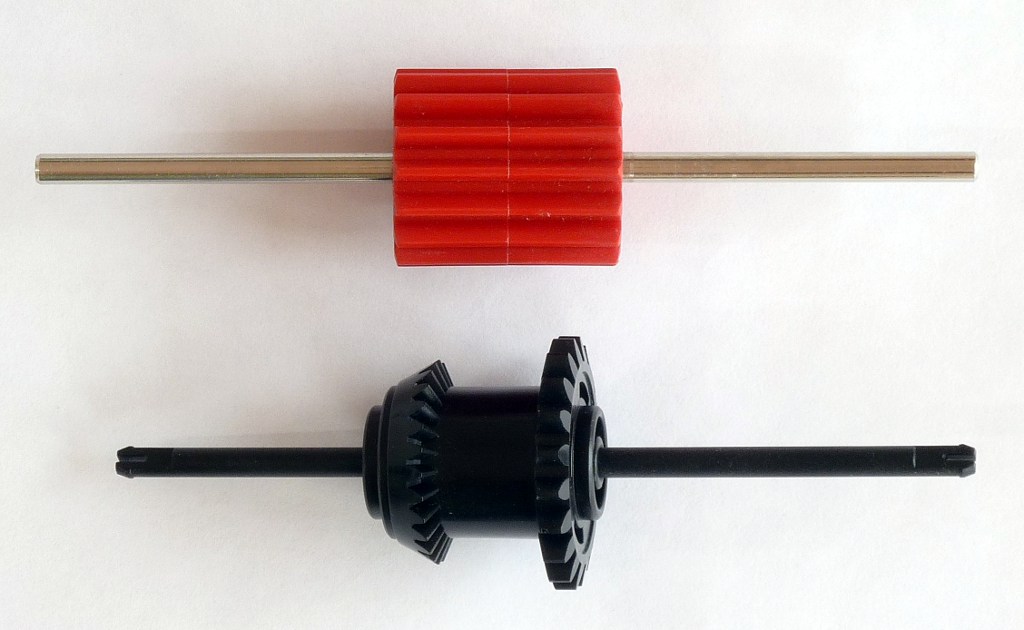 Генератор волн выполнен в виде двух радиально разнесенных роликов.
Генератор волн выполнен в виде двух радиально разнесенных роликов.
Недостатками известного устройства являются значительные габаритные размеры, сложность конструкции и невысокие динамические показатели работы, связанные с вращением значительных инерционных масс, находящихся на приводном валу одного из двигателей.
Это устраняется тем, что дифференциальный привод содержит по меньшей мере два приводных двигателя, выходные валы которых имеют возможность сцепления с корпусом привода посредством электромагнитных тормозов, по меньшей мере одну волновую дифференциальную передачу, содержащую дисковый генератор волн, гибкое и жесткое зубчатые колеса, и выходное звено, выполненное в виде зубчатого венца с наружным зацеплением. При этом один из приводных двигателей взаимодействует с внутренним зубчатым венцом генератора волн при помощи паразитных шестерен, жесткое зубчатое колесо связано с выходным эвеном непосредственно, а другой приводной двигатель соединен с гибким колесом волновой передачи посредством зубчатой муфты.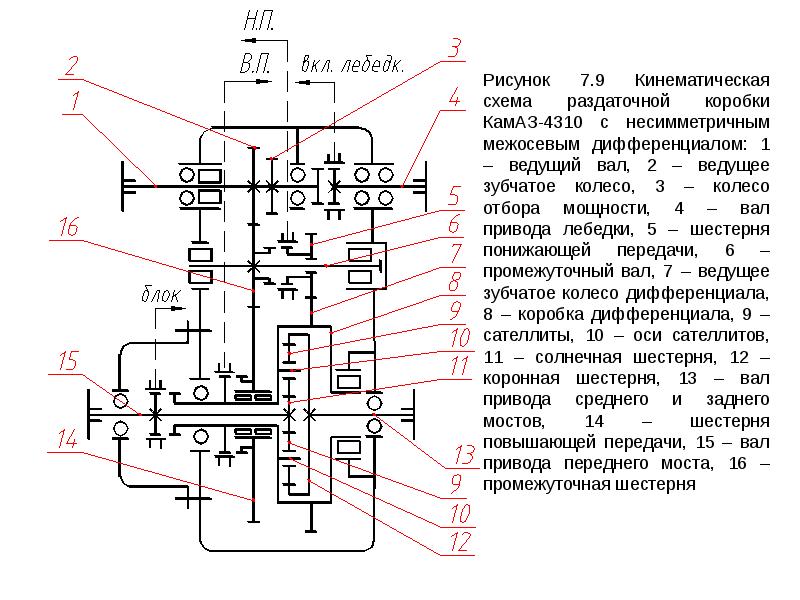
Новым отличительным существенным признаком в заявленном изобретении в сравнении с прототипом является то, что один из приводных двигателей взаимодействует с внутренним зубчатым венцом генератора волн при помощи паразитных шестерен, жесткое зубчатое колесо связано с выходным звеном непосредственно, а другой приводной двигатель соединен с гибким колесом волновой передачи посредством зубчатой муфты.
Сущность изобретения поясняется чертежом, на котором изображена кинематическая схема привода.
Привод состоит из двух кинематически связанных приводных двигателей 1 и 2, выходные валы которых имеют возможность сцепления с корпусом 3 привода посредством электромагнитных тормозов 4 и 5. На выходном валу приводного двигателя 1 крепится шестерня 6, которая находится в зацеплении с паразитными шестернями 7, установленными на осях 8 подвижно. Паразитные шестерни 7 в свою очередь сцеплены с внутренним зубчатым венцом дискового генератора волн 9. На генераторе волн 9 расположено гибкое колесо 10 волновой дифференциальной передачи, а с ним кинематически связано жесткое зубчатое колесо 11, соединенное непосредственно с выходным звеном 12 привода. На выходном валу приводного двигателя 2 закреплена зубчатая муфта 13, находящаяся в зацеплении с гибким колесом 10. Выходные валы приводных двигателей 1 и 2 расположены в корпусе 3 привода соосно.
На генераторе волн 9 расположено гибкое колесо 10 волновой дифференциальной передачи, а с ним кинематически связано жесткое зубчатое колесо 11, соединенное непосредственно с выходным звеном 12 привода. На выходном валу приводного двигателя 2 закреплена зубчатая муфта 13, находящаяся в зацеплении с гибким колесом 10. Выходные валы приводных двигателей 1 и 2 расположены в корпусе 3 привода соосно.
Привод работает следующим образом.
Для получения ускоренного вращения выходного звена 12 привода включается двигатель 2 и вместе с ним электромагнитный тормоз 5, который расцепляет зубчатую муфту 13 с корпусом 3. Вращение от приводного двигателя 2 передается через зубчатую муфту 13 гибкому колесу 10, которое обкатывается вокруг заторможенного дискового генератора волн 9 и приводит в движение жесткое зубчатое колесо 11. Таким образом крутящий момент с передаточным отношением дифференциальной волновой передачи передается от двигателя 2 выходному звену 12, связанному с жестким зубчатым колесом 11.
В случае работы дифференциального привода в замедленном режиме необходимо отключение приводного двигателя 2 и электромагнитного тормоза 5 и включение приводного двигателя 1 с электромагнитным тормозом 4, который расцепляет шестерню 6 с корпусом 3 привода. Вращение от приводного двигателя 1 передается через паразитные шестерни 7, установленные подвижно на осях 8, внутреннему зубчатому венцу дискового генератора волн 9, который заставляет деформироваться гибкое зубчатое колесо 10. При этом зубчатая муфта остается неподвижной так, как она заторможена электромагнитным тормозом 5. Деформация гибкого колеса 10 преобразуется во вращение жесткого зубчатого 11 и связанного с ним выходного звена 12 с замедленной рабочей скоростью.
Таким образом получаются два независимых движения, одно с ускоренным вращением, но с меньшим крутящим моментом на выходном звене, другое с замедленной скоростью, но с большим выходным крутящим моментом. Привод позволяет улучшить динамические показатели работы приводного двигателя 1, так как его вал связан с дисковым генератором волн 9 не напрямую, а через систему паразитных шестерен 7, установленных на неподвижных осях 8 в корпусе 3. Это позволяет сократить время переходных процессов при пуске, торможении и реверсировании двигателя 1.
Привод позволяет улучшить динамические показатели работы приводного двигателя 1, так как его вал связан с дисковым генератором волн 9 не напрямую, а через систему паразитных шестерен 7, установленных на неподвижных осях 8 в корпусе 3. Это позволяет сократить время переходных процессов при пуске, торможении и реверсировании двигателя 1.
Предлагаемый дифференциальный привод позволяет обеспечить широкий диапазон регулирования скорости выходного звена за счет суммирования или вычитания угловых скоростей вращения приводных двигателей, простоту конструкции, имеет малые габаритные размеры и высокие динамические показатели работы (малое время переходных процессов при пуске, торможении и реверсировании двигателей).
Формула изобретения
Дифференциальный привод, содержащий по меньшей мере два приводных двигателя, по меньшей мере одну волновую дифференциальную передачу, содержащую генератор волн, гибкое и подвижное жесткое колеса и выходное звено, отличающийся тем, что один из приводных двигателей взаимодействует с внутренним зубчатым венцом генератора волн при помощи паразитных шестерен, подвижное жесткое зубчатое колесо связано с выходным звеном непосредственно, а другой приводной двигатель соединен с гибким колесом волновой передачи посредством зубчатой муфты.
РИСУНКИ
Рисунок 1
Похожие патенты:
Установка с комбинированным приводом и дифференциальным соединением (варианты) // 2126507
Вариатор планетарный бесступенчатый // 2095665
Изобретение относится к машиностроению, а более конкретно к способам регулирования скорости вращения валов исполнительных механизмов и может найти применение, например, в конструкции автомобиля вместо стандартной ступенчатой коробки скоростей
Двухприводная планетарная передача // 2090790
Дифференциальный привод // 2064105
Изобретение относится к области машиностроения и может быть использовано в качестве привода авиационных систем
Бесступенчатая передача // 1733768
Изобретение относится к машиностроению , в частности к бесступенчатым передачам , используемым в трансмиссиях транспортных средств
Привод // 1514991
Изобретение относится к механизмам и приборам с многократным резервированием за счет работы от двух двигателей и позволяет упростить конструкцию и снизить осевые габариты за счет уменьшения числа элементов
Устройство для передачи вращения // 1471013
Изобретение относится к машиностроению
Планетарный привод // 970013
Патент 413066 // 413066
Привод наведения радиотелескопа // 319769
Коробка скоростей // 2168080
Изобретение относится к машиностроению, а именно к устройствам регулирования скорости шпинделей металлорежущих станков, и может быть использовано для обеспечения оптимального режима резания
Планетарная передача // 2217633
Изобретение относится к зубчатым передачам и может быть использовано в машиностроении и приборостроении
Привод // 2238193
Изобретение относится к транспортному машиностроению, в частности к приводу для автомобилей
Зубчатая передача с переменной скоростью // 2247271
Изобретение относится к машиностроению и может быть использовано в зубчатых передачах с переменной скоростью вращения ведомого вала
Транспортное средство // 2283243
Изобретение относится к машиностроению и может использоваться в индустрии развлечений для создания транспортного средства с новыми потребительскими свойствами
Резервированный электропривод // 2283975
Изобретение относится к приводам автоматических устройств и может быть использовано при создании резервированных систем автоматического управления
Система передачи с разделением потока мощности с четырьмя отводами // 2334142
Изобретение относится к системе передач с разделением потока мощности и может быть использовано в транспортных средствах
Трансмиссия для транспортного средства // 2398992
Изобретение относится к трансмиссии транспортных средств
Механизм поворота // 2441792
Изобретение относится к транспортному машиностроению, а именно к гусеничным транспортным средствам
Устройство для сообщения вращательного движения // 2445530
Изобретение относится к области космической техники и может быть использовано, например, для сообщения вращательного движения различным механизмам космических летательных аппаратов
Страница не найдена — Инженерная практика
Свежий выпуск: № 09/2022
Популярное в этом месяце Освоение изготовления арматуры в коррозионно-стойком исполнении КОСУХИН Андрей Викторович, ООО «Уралнефтемаш» Патентование разработок в нефтегазовой отрасли в вопросах и ответах ЛЫСКОВ Александр Анатольевич, Федеральный институт промышленной собственностиСУШКОВА Ольга Викторовна, Федеральный институт промышленной собственностиЭРИВАНЦЕВА Татьяна Николаевна, Федеральный институт промышленной собственности Методы защиты оборудования в условиях наличия h3S и СО2 на месторождениях ООО «Сладковско-Заречное» ВОРОПАЕВ Константин Викторович, ООО «Сладковско-Заречное» Обзор практического опыта эксплуатации различных способов соединения труб с внутренним антикоррозионным покрытием ПЕТРОВ Сергей Степанович, ООО «Научно-производственный центр «Самара»СУРГАЕВА Екатерина Сергеевна, ООО «Научно-производственный центр «Самара» Снижение вязкости промежуточного слоя в резервуарах и в перекачиваемой жидкости в трубопроводах ВДОВИН Эдуард Юрьевич, ООО «Инженерно-технический центр инновационных технологий»
Ближайшие совещания
Отраслевая техническая Конференция
Инновации в строительстве, реконструкции и ремонте скважин российских нефтегазовых компаний ‘2023.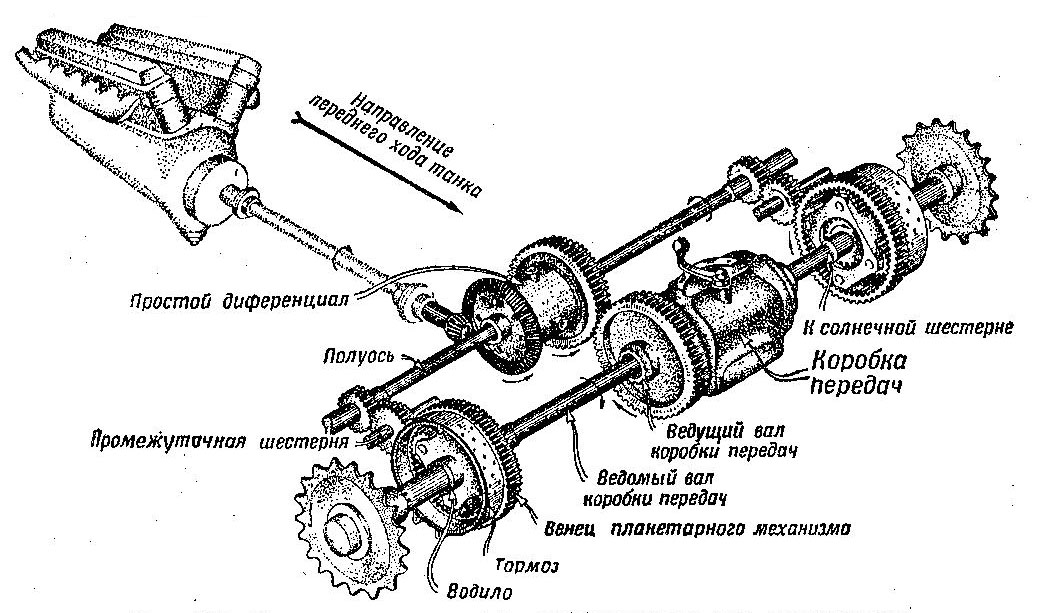 Развитие технологического потенциала и суверенитета в условиях новых отраслевых вызовов в России.
14-15 февраля 2023 года, г. Москва
Развитие технологического потенциала и суверенитета в условиях новых отраслевых вызовов в России.
14-15 февраля 2023 года, г. Москва
Робо
РобоПередвижение роботов-крыс: дифференциальный привод
Дифференциальный привод — двухколесная система привода с независимой приводы на каждое колесо. Название связано с тем, что движение вектор робота представляет собой сумму независимых движений колес, т.е. также относится к механическому дифференциалу (однако эта система привода делает , а не использовать механический дифференциал). Ведущие колеса обычно устанавливаются на с каждой стороны робота и вперед:
На приведенной выше диаграмме большие серые заштрихованные прямоугольники
ведущие колеса. Небольшой серый заштрихованный прямоугольник — это неуправляемый
колесо, которое образует треножную опорную конструкцию для корпуса
робот. Часто неведущее колесо представляет собой самоустанавливающееся колесо
Небольшой серый заштрихованный прямоугольник — это неуправляемый
колесо, которое образует треножную опорную конструкцию для корпуса
робот. Часто неведущее колесо представляет собой самоустанавливающееся колесо
К сожалению, роликовые колеса могут вызвать проблемы, если робот
меняет свое направление. Затем колесико должно повернуться на 180 градусов и,
при этом смещенный вертлюг может придать нежелательный вектор движения
робот. Это может привести к ошибке перевода заголовка. Однако, если
робот всегда меняет направление, двигаясь вперед и поворачиваясь, самоустанавливающееся колесо
может быть в порядке. Другой альтернативой самоустанавливающемуся колесу является фиксируемый шарик, который
не использует поворотный механизм. В случае небольших роботов, таких как
те, которые используются в соревнованиях Robo-Rats, катящееся устройство не является строго
необходимо, если пол гладкий — некоторые роботы использовали фиксированные закругленные детали Lego вместо невыпадающих.
Прямолинейное движение осуществляется поворотом ведущих колес с той же скоростью в том же направлении, хотя это не так просто, как кажется (Смотри ниже). Поворот на месте (нулевой радиус поворота) осуществляется поворотом ведущие колеса с той же скоростью в противоположном направлении. Произвольный траектории движения могут быть реализованы путем динамического изменения угловой скорости и/или направление ведущих колес. Однако на практике сложность уменьшено за счет реализации траекторий движения в виде чередующихся последовательностей прямолинейных переводы и ротации на месте. Одометрия легче сделать с помощью этого метода.
Многие имеющиеся в продаже роботы используют дифференциальный привод метод, такой как серия Pioneer от ActiveMedia:
Двигатели :
Два — По одному на каждое ведущее колесо.
Плюсы :
Простота — Система дифференциального привода очень проста, часто ведущее колесо напрямую связано с двигателем (обычно мотор-редуктор — двигатель с внутренним редуктором, потому что у большинства двигателей недостаточно крутящего момента, чтобы водить колесо напрямую).
Минусы :
Управление — может быть сложно заставить робота с дифференциальным приводом двигаться
по прямой. Поскольку ведущие колеса независимы, если они
не поворачиваясь точно с той же скоростью, робот отклонится в сторону.
Заставить приводные двигатели вращаться с одинаковой скоростью сложно из-за небольшого
различия в двигателях, различия в трении в трансмиссии и трение
различия в интерфейсе колесо-земля. Чтобы убедиться, что робот
двигаясь по прямой, может потребоваться отрегулировать обороты двигателя очень
часто (много раз в секунду). Для этого может потребоваться программное обеспечение на основе прерываний.
и программирование на языке ассемблера.
Вернуться на страницу «Передвижение роботов-крыс»
Вернуться на главную страницу Robo-Rats
Последнее изменение: 01.04.01 22:30
13.1.2.2 Дифференциальный привод
13.1.2.2 Дифференциальный приводСледующий: 13.1.2.3 Простой одноколесный велосипед Вверх: 13.1.2 Кинематика для колесного велосипеда Предыдущий: 13.1.2.1 Простой автомобиль
13.1.2.2 Дифференциальный привод
Большинство внутренних мобильных роботов не двигаются, как автомобиль. Например,
рассмотрим платформу мобильной робототехники, показанную на рис.
13.2а. Это пример наиболее популярного способа
управлять внутренними мобильными роботами. Имеются два основных колеса, каждое из которых
прикреплен к собственному двигателю. Третье колесо (не видно на рис. 13.2а) размещается сзади, чтобы пассивно катиться
предотвращая падение робота.
13.2а) размещается сзади, чтобы пассивно катиться
предотвращая падение робота.
Чтобы построить простую модель ограничений, возникающих из-за
дифференциальный привод, только расстояние между двумя колесами,
и радиус колеса, , необходимы. См. рисунок
13. 2б. Вектор действия
напрямую
задает две угловые скорости колеса (например, в радианах на
второй). Рассмотрите, как движется робот при различных действиях.
применяемый. См. рисунок 13.3. Если
, затем
робот движется вперед в направлении, указанном колесами.
Скорость пропорциональна . В общем случае, если , то
расстояние, пройденное за время, равно
(т.к. это суммарное угловое смещение колес). Если , то робот вращается по часовой стрелке, потому что
колеса крутятся в разные стороны. Это мотивирует
размещение начала координат кузова в центре оси между
колеса. По этому заданию переноса не происходит, если колеса
вращаться с одинаковой скоростью, но в противоположных направлениях.
2б. Вектор действия
напрямую
задает две угловые скорости колеса (например, в радианах на
второй). Рассмотрите, как движется робот при различных действиях.
применяемый. См. рисунок 13.3. Если
, затем
робот движется вперед в направлении, указанном колесами.
Скорость пропорциональна . В общем случае, если , то
расстояние, пройденное за время, равно
(т.к. это суммарное угловое смещение колес). Если , то робот вращается по часовой стрелке, потому что
колеса крутятся в разные стороны. Это мотивирует
размещение начала координат кузова в центре оси между
колеса. По этому заданию переноса не происходит, если колеса
вращаться с одинаковой скоростью, но в противоположных направлениях.
На основании этих наблюдений уравнение перехода конфигурации имеет вид
| (13.16) |
Трансляционная часть содержит и части, так же, как простой автомобиль, потому что дифференциальный привод движется в в том направлении, куда направлены его ведущие колеса.
 Скорость перевода
зависит от средней угловой скорости колеса. Чтобы увидеть это,
рассмотрим случай, когда одно колесо неподвижно, а другое вращается.
Первоначально это заставляет робота перемещаться со скоростью, равной
по сравнению с вращением обоих колес. Скорость вращения пропорциональна изменению угловых скоростей колес. Робот
скорость вращения растет линейно с радиусом колеса, но уменьшается
линейно относительно расстояния между колесами.
Скорость перевода
зависит от средней угловой скорости колеса. Чтобы увидеть это,
рассмотрим случай, когда одно колесо неподвижно, а другое вращается.
Первоначально это заставляет робота перемещаться со скоростью, равной
по сравнению с вращением обоих колес. Скорость вращения пропорциональна изменению угловых скоростей колес. Робот
скорость вращения растет линейно с радиусом колеса, но уменьшается
линейно относительно расстояния между колесами.Иногда предпочтительнее трансформировать пространство действия. Позволять и . В таком случае, можно интерпретировать как переменную действия, которая означает «перевести» и означает «повернуть». Используя эти действия, уравнение перехода конфигурации принимает вид
| (13.17) |
В таком виде уравнение перехода конфигурации напоминает (13.15) для простого автомобиля (попробуйте установить и ).
 Дифференциальный привод может легко
имитировать движения простого автомобиля. Для дифференциального привода
скорость вращения может быть установлена независимо от поступательного
скорость. Однако у простого автомобиля скорость появляется в
в
выражение. Следовательно, скорость вращения зависит от
поступательная скорость.
Дифференциальный привод может легко
имитировать движения простого автомобиля. Для дифференциального привода
скорость вращения может быть установлена независимо от поступательного
скорость. Однако у простого автомобиля скорость появляется в
в
выражение. Следовательно, скорость вращения зависит от
поступательная скорость. Напомним вопрос о кратчайших путях Ридса-Шеппа и
Автомобили Дубинс. Такой же вопрос по приводу дифференциала получается
быть неинтересным, потому что дифференциальный привод может вызвать
центр своей оси, чтобы следовать любой непрерывной траектории в
. В качестве
изображенный на рис. 13.4, он может перемещаться между любыми двумя
конфигурации путем: 1) сначала вращения себя, чтобы направить колеса на
целевая позиция, не вызывающая перевода; 2) переводя себя на
положение цели; и 3) поворачивается в желаемую ориентацию,
что снова не вызывает перевода.