ГИДРАВЛИЧЕСКИЙ ПРИВОД КОЛЕС ДЛЯ АВТОМОБИЛЯ И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ
Изобретение касается гидравлического привода колес для автомобиля, в частности для автомобилей промышленного назначения, и особенно предпочтительно для грузовых автомобилей или автобусов. Кроме того, предлагается способ эксплуатации для таких автомобилей.
Для многих целей применения необходимо или по меньшей мере целесообразно, осуществлять деятельность с помощью автомобиля как в условиях бездорожья, так и в дорожных условиях. Условия бездорожья отличаются, в частности, дорогами без покрытия, которые обычно имеются на стройплощадках или в лесу. Так называемые дорожные условия отличаются, в частности, асфальтированными шоссе, в частности для дальнего сообщения. В условиях бездорожья часто возникают ситуации, в которых автомобиль вследствие рыхлого грунта с помощью, в частности, одноосного привода, который является общепринятым для транспортных средств для дорожных условий, не может создать достаточной тяги и застревает.
Исходя из этого, в основе настоящего изобретения лежит задача, создать возможность выполнения автомобиля для эксплуатации как в условиях бездорожья, так и в дорожных условиях. Задача решается с помощью признаков независимых пунктов формулы изобретения. Предпочтительные усовершенствования являются предметом зависимых пунктов формулы изобретения.
Изобретение касается устройства для гидравлического привода колес автомобиля, которое по меньшей мере включает в себя:
— колесный фланец;
— поворотную цапфу; и
— гидравлический роторно-поршневой привод колес, выполненный и спроектированный для приложения и восприятия крутящего момента на колесном фланце, при этом активное воздействие роторно-поршневого привода колес выполнено с возможностью подключения и отключения.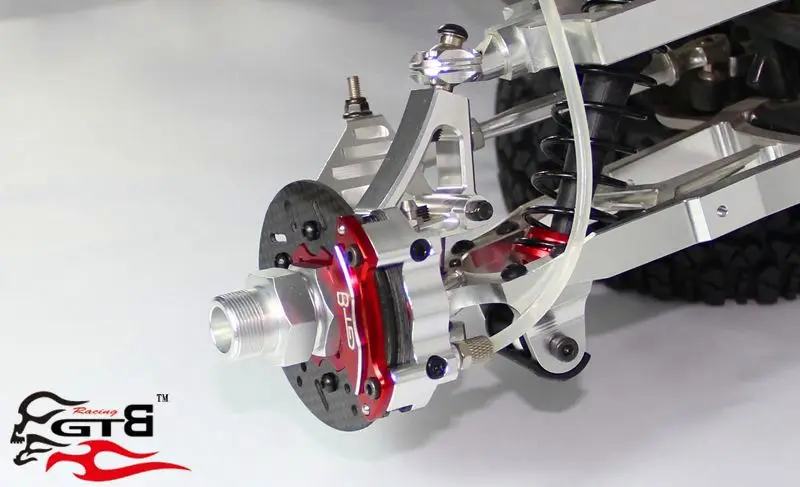
Гидравлический роторно-поршневой привод колес служит для передвижения автомобиля или, соответственно, поддержки механической системы привода. При этом колеса приводятся во вращение за счет давления жидкости, создаваемого с помощью насоса. Предлагаемые изобретением транспортные средства могут, таким образом, иметь два узла привода. Автомобиль может, наряду с первичным механическим узлом привода, иметь дополнительный узел привода для гидростатического привода колеса, или, соответственно, колесной оси.
Автомобиль особенно предпочтительно представляет собой допущенный к дорожному движению автомобиль для перевозки грузов, например, тягач для полуприцепа или грузовой автомобиль, который альтернативно может тянуть прицеп. Но он может также служить для перевозки людей (например, автобус). Автомобиль имеет предпочтительно максимальную скорость, которая по меньшей мере составляет больше или равна 60 км/ч (километров в час). В настоящее изобретение не включены транспортные средства, имеющие максимальную скорость меньше 60 км/ч, например, напольные транспортные средства (экскаваторы) или тракторы.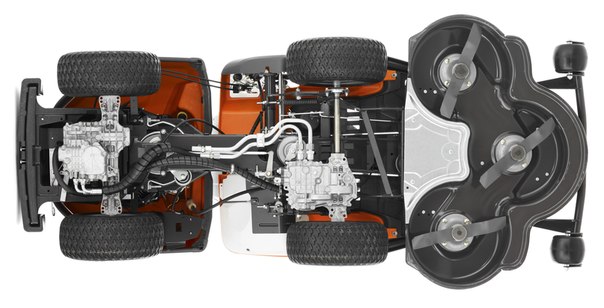
Автомобиль имеет несколько колес, которые могут приводиться в движение посредством колесного фланца. Колесный фланец может быть, например, привернут к ободу, на котором установлены шины, или же быть выполнен цельно с ободом. Колесо или, соответственно, колесный фланец установлен на поворотной цапфе, на которой установлен кузов транспортного средства. Поворотная цапфа может при этом обладать возможностью вращения вокруг так называемого шкворня поворотной цапфы и при этом быть установлена с возможностью управления. Предлагаемое изобретением устройство имеет также роторно-поршневой привод колес, посредством которого на колесный фланец может передаваться крутящий момент. Крутящий момент, который создается роторно-поршневым приводом колес, возникает при впуске в роторно-поршневой привод гидравлической жидкости под давлением. Роторно-поршневой привод колес включает в себя камеру, в которой поршень вращается отдающим крутящий момент валом. При этом роторно-поршневой привод колес может также включать в себя вращающийся поршень и расположенное внутри корпуса, уплотненное в наружном направлении наружное кольцо.
В одном из предпочтительных вариантов осуществления устройства роторно-поршневой привод колес выполнен по принципу геролера.
Геролер может представлять собой гидравлический роторно-поршневой привод, у которого подвижный кольцевой вращающийся поршень, имеющий геометрию наружной системы зубьев, движется по орбите в неподвижном наружном кольце. Само наружное кольцо имеет внутреннюю систему зубьев, по которой может обкатываться или, соответственно, скользить поршень.

При подключении описанного роторно-поршневого привода колес из отключенного состояния особенно предпочтительно, чтобы при этом не происходил толчок включения, например, как у радиально-поршневого привода, имеющего ролики, которые для активирования привода из состояния свободного хода попадают на траекторию роликов, а осуществлялось плавное приложение крутящего момента. Это служит для повышения комфорта за счет снижения шума и разгрузки механических компонентов от толчковых нагрузок.
Также благодаря этой геометрии действия роторно-поршневого привода может устраняться чрезмерное ускорение колесного фланца или, соответственно, присоединенного колеса.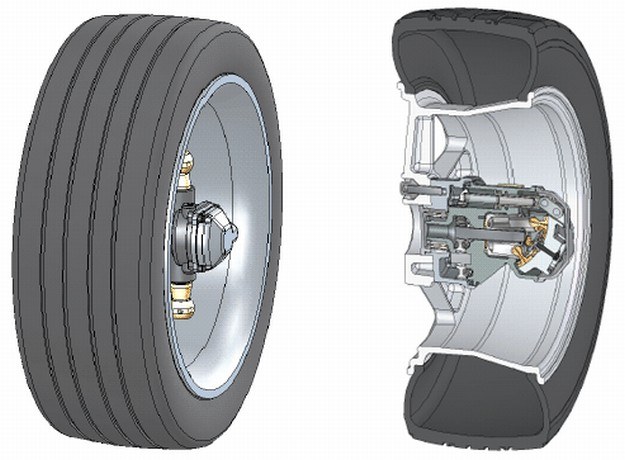 При этом частота вращения и передаваемый крутящий момент может точно адаптироваться к условиям грунта.
При этом частота вращения и передаваемый крутящий момент может точно адаптироваться к условиям грунта.
Когда роторно-поршневой привод колес отключен, при движении колесного фланца он больше не движется вместе с ним. Это значит, что подвижные компоненты остаются неподвижными, и через роторно-поршневой привод колес проходит значительно меньшее количество гидравлической жидкости, чем это происходит при включенной системе привода.
Отключение или, соответственно, подключение активного воздействия роторно-поршневого привода колес может выполняться гидравлическим, механическим и/или магнитным способом. В одном из возможных вариантов может осуществляться включение с геометрическим замыканием, например, с помощью смещаемых в осевом направлении штифтов или торцевого зубчатого зацепления. Механическая или гидравлическая система может быть устроена подобно традиционной фрикционной муфте. В этом дополнительном варианте при подключении фрикционная накладка прижимается к ответной поверхности. При электромагнитном подключении посредством подключаемого и отключаемого магнитного поля либо продавливается поверхность, движется элемент геометрического замыкания, например, штифт, либо затвердевает магнетореологическая жидкость, так что реализуется активное воздействие.
При электромагнитном подключении посредством подключаемого и отключаемого магнитного поля либо продавливается поверхность, движется элемент геометрического замыкания, например, штифт, либо затвердевает магнетореологическая жидкость, так что реализуется активное воздействие.
Предлагаемое изобретением устройство имеет то преимущество, что оно может применяться во включенном состоянии в условиях бездорожья, при этом во включенном состоянии оно вызывает только небольшую мощность потерь.
Вследствие имеющейся возможности отключения роторно-поршневого привода колес он изнашивается меньше и таким образом предотвращает выход из строя всего автомобиля, когда роторно-поршневой двигатель больше не может вращаться, например, из-за какого-либо дефекта. Кроме того, отключенный роторно-поршневой привод колес не представляет собой совместно вращающуюся массу, так что расход топлива такого автомобиля сравним с расходом автомобиля, в котором не смонтировано предлагаемое изобретением устройство.
В одном из предпочтительных вариантов осуществления устройства роторно-поршневой привод колес соединен с колесным фланцем и обладает возможностью поворота относительно подвески колеса или, соответственно, продольной оси автомобиля.
В одном из особенно предпочтительных вариантов осуществления устройства роторно-поршневой привод колес соединен с колесным фланцем и обладает возможностью поворота относительно неподвижной оси автомобиля.
При этом роторно-поршневой привод колес может быть интегрирован в колесную часть снабженной пневматическими или листовыми рессорами неподвижной оси автомобиля для перевозки грузов. При этом интегрированный в колесную часть неподвижной оси роторно-поршневой привод колес обладает возможностью относительно неподвижной оси. Колесный фланец может быть выполнен для управления автомобилем. Под колесной частью в смысле настоящего изобретения следует понимать конструктивные элементы, обладающие возможностью поворота вокруг оси управляемого колеса (середина шкворня поворотной цапфы), которые выполняют функцию опоры колес, помещения тормозных систем, рычагов поворотной цапфы и направления колес/шин.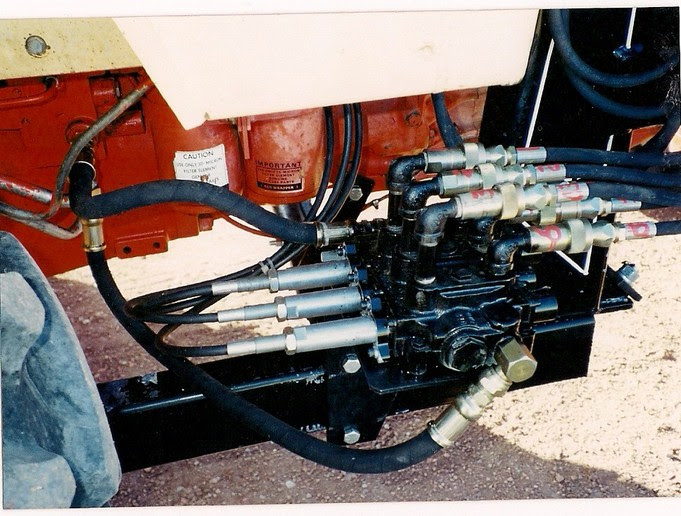
Для создания крутящего момента или, соответственно, для восприятия крутящего момента в колесном фланце к поворотному колесному фланцу, снабженному роторно-поршневым приводом колес, могут проводиться гибкие гидравлические трубопроводы.
Возможно также интегрирование описанного привода в колесную часть поворотной цапфы, отдельно подвешенной для каждого колеса к шасси, например, при оси с независимой подвеской колес на сдвоенных поперечных рычагах. При этом также возможна подача гидравлической напорной жидкости посредством механического роторного питателя на поворотной оси. Низкая конструктивная высота, низкий вес и простое снабжение роторно-поршневого привода колес позволяют получить особенно предпочтительное применение в управляемых осях транспортного средства, при котором могут сохраняться обычные для автомобилей промышленного назначения осевые нагрузки, размеры ширины колеи и геометрии управления.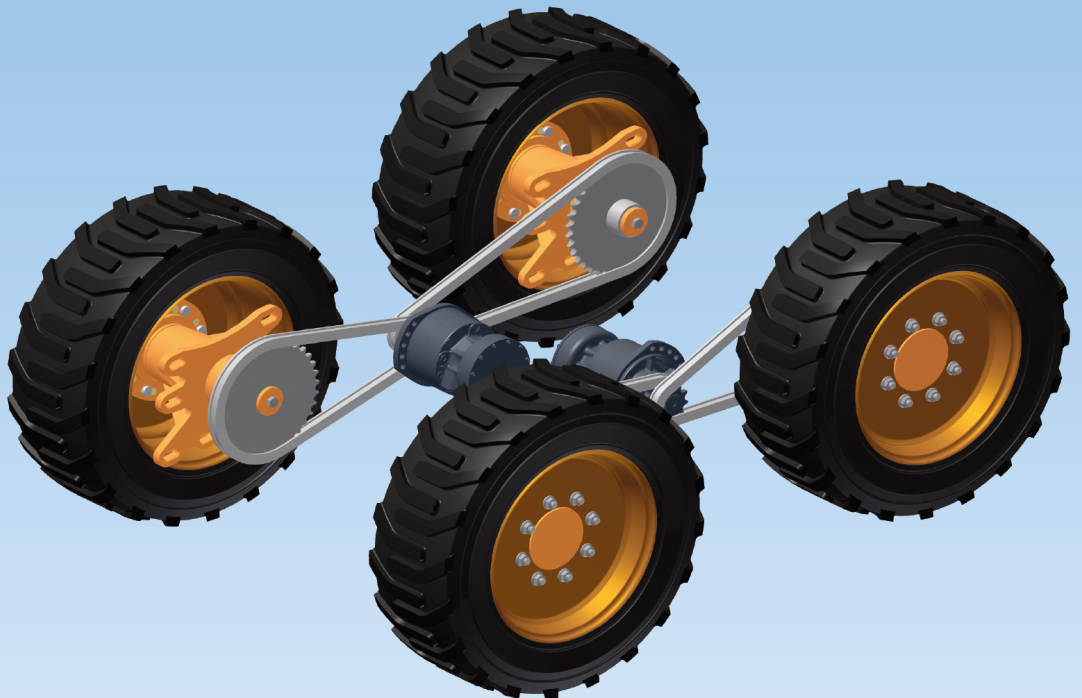
В другом предпочтительном варианте осуществления устройства роторно-поршневой привод колес соединен с колесным фланцем без передачи. У устройств для создания требуемого крутящего момента привода колес при низкой частоте вращения колеса может существовать необходимость в повышающих передачи или, соответственно, понижающих передачах (крутящего момента) в виде механической центральной передачи или внешнего планетарного ряда на колесе. При предлагаемом здесь устройстве применение повышающей передачи или, соответственно, понижающей передачи не требуется. В частности, роторно-поршневой привод колес может соединяться непосредственно с колесным фланцем, при этом может использоваться традиционное дисковое колесо. Вследствие используемого диаметра колеса у грузовых автомобилей достигается надлежащий профиль крутящего момента и частоты вращения. Благодаря этому в значительной степени снижаются конструктивный размер и сложность роторно-поршневого привода колес. Кроме того, путем надлежащего выбора диаметра колеса автомобиля может достигаться надлежащее отношение между крутящим моментом и частотой вращения, которые действует на роторно-поршневой привод колес.
В другом предпочтительном варианте осуществления устройства гидравлическая жидкость может подводиться и отводиться через поворотную цапфу. При подводе или, соответственно, отводе гидравлической жидкости через поворотную цапфу предпочтительным образом используется имеющийся конструктивный элемент, так что отсутствует необходимость изменения конструкции традиционного автомобиля. В частности, традиционные автомобили для дорожных условий могут дооснащаться этим устройством с небольшими издержками.
В другом аспекте предлагается способ эксплуатации автомобиля в связи с предлагаемым изобретением устройством, при котором роторно-поршневой привод колес активируется для торможения и ускорения. Соответственно этому роторно-поршневой привод колес может как создавать крутящий момент, так и воспринимать крутящий момент.
При торможении гидростатический роторно-поршневой привод колес может воспринимать крутящий момент, действующий на колесо снаружи. За счет этого восприятия крутящего момента может тормозиться колесный фланец или, соответственно, присоединенное колесо.![]() Благодаря этому возможно регенеративное использование энергии торможения, так как при этом роторно-поршневой привод колес может использоваться или, соответственно, эксплуатироваться как насос для жидкости, в частности гидравлической жидкости. При этом гидравлическое давление может также использоваться для электрического генераторного узла, который, например, может использоваться для зарядки батареи транспортного средства. Дополнительно или альтернативно может также пополняться аккумулятор давления для гидравлической жидкости.
Благодаря этому возможно регенеративное использование энергии торможения, так как при этом роторно-поршневой привод колес может использоваться или, соответственно, эксплуатироваться как насос для жидкости, в частности гидравлической жидкости. При этом гидравлическое давление может также использоваться для электрического генераторного узла, который, например, может использоваться для зарядки батареи транспортного средства. Дополнительно или альтернативно может также пополняться аккумулятор давления для гидравлической жидкости.
При ускорении с помощью роторно-поршневого привода колес особенно предпочтительно, чтобы при этом создавалось не рывковое вращательное движение, а происходило плавное приложение крутящего момента. Рывковое вращательное движение присоединенного колеса может предотвращаться путем затормаживания роторно-поршневого привода колес на высоких частотах вращения. В роторно-поршневом приводе колес установлен вращающийся поршень, который движется гидравлической жидкостью по орбите. При этом вращающийся поршень скользит относительно наружного кольца, которое установлено концентрически к центру вращения колеса и может быть жестко соединено с ним. Благодаря этому скользящему относительному движению между вращающимся поршнем и наружным кольцом можно избежать рывкового вращательного движения. При этом частота вращения и передаваемый крутящий момент могут точно адаптироваться к условиям грунта. Во избежание рывковых движений поток жидкости может дросселироваться надлежащим или, соответственно, управляемым образом. При этом аналогично тому, как в демпферах конечных положений у гидравлических поршней, поток текучей среды дросселируется перед достижением конечного положения, чтобы обеспечить возможность плавного прихода поршня в конечные положения, прежде чем цилиндр и поршень жестко ударятся друг о друга. Для уменьшения рывковых изменений движения могут также использоваться, например, газовые аккумулирующие элементы, (аккумуляторы гидравлического давления).
При этом вращающийся поршень скользит относительно наружного кольца, которое установлено концентрически к центру вращения колеса и может быть жестко соединено с ним. Благодаря этому скользящему относительному движению между вращающимся поршнем и наружным кольцом можно избежать рывкового вращательного движения. При этом частота вращения и передаваемый крутящий момент могут точно адаптироваться к условиям грунта. Во избежание рывковых движений поток жидкости может дросселироваться надлежащим или, соответственно, управляемым образом. При этом аналогично тому, как в демпферах конечных положений у гидравлических поршней, поток текучей среды дросселируется перед достижением конечного положения, чтобы обеспечить возможность плавного прихода поршня в конечные положения, прежде чем цилиндр и поршень жестко ударятся друг о друга. Для уменьшения рывковых изменений движения могут также использоваться, например, газовые аккумулирующие элементы, (аккумуляторы гидравлического давления).
В другом предпочтительном варианте осуществления способа роторно-поршневой привод колес применим для рекуперации энергии торможения.![]() При этом роторно-поршневой привод колес может действовать как насос для гидравлической жидкости.
При этом роторно-поршневой привод колес может действовать как насос для гидравлической жидкости.
При этом роторно-поршневой привод колес может также использоваться или, соответственно, эксплуатироваться как насос для жидкости с обратным силовым потоком. То есть если снаружи, например, через колесо, на роторно-поршневой привод колес передается крутящий момент, то гидравлическая жидкость при создании давления нагнетается, как в насосе. При этом возникает момент, который противодействует крутящему моменту снаружи и таким образом затормаживает колесо. С помощью этого созданного гидравлического давления могут эксплуатироваться и другие гидравлические элементы.
Кроме того, колесный фланец или, соответственно, присоединенное колесо может быть оснащено жестко соединенным с колесным фланцем тормозным устройством, например, дисковым или барабанным тормозом с пневматическим или гидравлическим приводом. Благодаря этому могут выполняться законодательные предписания по допуску такого транспортного средства к дорожному движению.
В другом предпочтительном варианте осуществления способа роторно-поршневой привод колес может отключаться, в зависимости от скорости автомобиля. Роторно-поршневой привод колес в любое время вручную или автоматически может подключаться или, соответственно, отключаться, в зависимости от скорости. Когда не достигается предельная скорость, то при соответствующем грунте дорожного полотна может происходить застревание автомобиля. При подключении роторно-поршневого привода колес достигаются крутящий момент и оптимизированная по частоте вращения передача усилий на грунт. Когда предельная скорость превышается, то застревание автомобиля невероятно, и роторно-поршневой привод колес может отключаться. Автоматическому отключению можно противодействовать вручную, когда это целесообразно для особых целей применения автомобиля. С помощью этого способа расход топлива автомобиля снижается до возможного минимума без необходимости действий водителя транспортного средства. При этом предпочтительно также, если при недостижении предельной скорости роторно-поршневой привод колес снова автоматически подключается. Применение такого способа, в частности, предпочтительно в условиях обширного бездорожья, при наличии участков, движение по которым возможно как движение в дорожных условиях.
Применение такого способа, в частности, предпочтительно в условиях обширного бездорожья, при наличии участков, движение по которым возможно как движение в дорожных условиях.
В другом аспекте изобретения предлагается использование устройства для автомобилей, имеющих максимальную скорость, которая составляет больше или равна 60 км/ч. У автомобилей, имеющих максимальную скорость, которая составляет больше или равна 60 км/ч, непосредственное или, соответственно, незамедлительное тормозное действие, которое может создаваться роторно-поршневым приводом колес, является недостаточным по меньшей мере для законодательного допуска в соответствии с директивой ЭКЕ (директивой Экономической комиссии для стран Европы). Также достижимые скорости при приводе с помощью роторно-поршневого привода колес для скоростей по меньшей мере 60 км/ч являются недостижимыми. Для этих целей особенно предпочтительно использовать предложенное устройство, потому что оно сочетает преимущества проходимости с преимуществами, в частности, автомобиля с одноосным приводом в дорожных условиях.
В другом аспекте изобретения описан автомобиль, который выполнен для эксплуатации в условиях бездорожья, а также для эксплуатации в дорожных условиях при скоростях по меньшей мере 60 км/ч, при этом в по меньшей мере двух колесах установлен гидравлический роторно-поршневой привод колес, который может подключаться и отключаться во время движения.
Признаки, приведенные в пунктах формулы изобретения по отдельности, могут комбинироваться друг с другом любым технологически целесообразным образом и могут дополняться поясняющим содержанием описания и деталей фигур, при этом выявляются другие варианты осуществления изобретения.
Изобретение, а также техническая подоплека поясняются подробнее ниже с помощью фигур. На фигурах показаны особенно предпочтительные примеры осуществления, которыми изобретение, однако, не ограничено. В частности, следует указать на то, что фигуры и, в частности, изображенные отношения размеров являются только схематичными. Показано:
фиг. 1: устройство, имеющее роторно-поршневой привод колес, установленное в колесе, в сечении;
1: устройство, имеющее роторно-поршневой привод колес, установленное в колесе, в сечении;
фиг. 2: устройство, имеющее роторно-поршневой привод колес в оси управляемого колеса, на виде сверху;
фиг. 3: роторно-поршневой привод колес (геролер) в сечении;
фиг. 4: автомобиль, снабженный гидравлическим приводом колес.
На фиг. 1 показано устройство 1, имеющее роторно-поршневой привод 6 колес, в сечении, которое установлено в колесном фланце 4. Роторно-поршневой привод 6 колес посредством шкворня 18 поворотной цапфы соединен с возможностью поворота с неподвижной осью 5. На неподвижной оси 5 посредством соединения шасси с пневматической или листовой рессорой может устанавливаться кузов транспортного средства (здесь не изображен). В роторно-поршневом приводе 6 колес установлен вращающийся поршень 20, который движется посредством гидравлической жидкости 8 по орбите. Гидравлическая жидкость 8 подводится по подводящему трубопроводу 13 и отводится через отвод 14. Вращающийся поршень 20 посредством короткого карданного вала 12 или аналогично действующего узла для передачи момента соединен с муфтой 11 сцепления. Изображенная здесь муфта 11 сцепления представляет собой муфту сцепления с гидравлическим приводом. Когда муфта 11 сцепления соединяется с колесным фланцем 4, созданный вращающимся поршнем 20 крутящий момент 7 передается на колесный фланец. Колесный фланец 4 соединен с дисковым колесом 17, которое вместе с шинами 19 образует колесо 9. Кроме того, колесный фланец 4 жестко соединен с тормозом, который здесь в качестве примера изображен в виде дискового тормоза, имеющего тормозной диск 15 и тормозные накладки 16. Также возможен был бы один из вариантов осуществления, включающий в себя барабанный тормоз. Фиг. 1 представляет собой изображение плоскости сечения A-A, которая определена на фиг. 2. Кроме того, на фиг. 1 показано, в какой плоскости сечения лежит изображение фиг. 3 (B-B).
Вращающийся поршень 20 посредством короткого карданного вала 12 или аналогично действующего узла для передачи момента соединен с муфтой 11 сцепления. Изображенная здесь муфта 11 сцепления представляет собой муфту сцепления с гидравлическим приводом. Когда муфта 11 сцепления соединяется с колесным фланцем 4, созданный вращающимся поршнем 20 крутящий момент 7 передается на колесный фланец. Колесный фланец 4 соединен с дисковым колесом 17, которое вместе с шинами 19 образует колесо 9. Кроме того, колесный фланец 4 жестко соединен с тормозом, который здесь в качестве примера изображен в виде дискового тормоза, имеющего тормозной диск 15 и тормозные накладки 16. Также возможен был бы один из вариантов осуществления, включающий в себя барабанный тормоз. Фиг. 1 представляет собой изображение плоскости сечения A-A, которая определена на фиг. 2. Кроме того, на фиг. 1 показано, в какой плоскости сечения лежит изображение фиг. 3 (B-B).
На фиг. 2 показано расположение устройства 1 на виде сверху и определено положение вида сечения изображения фиг. 1 (A-A). Роторно-поршневой привод 6 колес с возможностью поворота посредством шкворня 18 поворотной цапфы соединен с неподвижной осью 5 и может управляться посредством поперечной рулевой тяги 33 и рычага поворотной цапфы (изображен серповидный рычаг) 34. С противоположной стороны роторно-поршневой привод 6 колес соединен с колесным фланцем 4, так что на не изображенное колесо 9, или, соответственно, дисковое колесо 17 может передаваться крутящий момент 7.
1 (A-A). Роторно-поршневой привод 6 колес с возможностью поворота посредством шкворня 18 поворотной цапфы соединен с неподвижной осью 5 и может управляться посредством поперечной рулевой тяги 33 и рычага поворотной цапфы (изображен серповидный рычаг) 34. С противоположной стороны роторно-поршневой привод 6 колес соединен с колесным фланцем 4, так что на не изображенное колесо 9, или, соответственно, дисковое колесо 17 может передаваться крутящий момент 7.
Роторно-поршневой привод 6 колес изображен, будучи окружен тормозным диском 15, который выполнен для эксплуатации автомобиля 3 (не изображен). Автомобиль может быть выполнен для перевозки людей и грузов с допустимой максимальной скоростью больше 60 км/ч.
На фиг. 3 показан роторно-поршневой привод 6 колес в сечении. Положение сечения показано на фиг. 1 посредством B-B. Концентрически к центру 24 вращения установлено наружное кольцо 21, которое выполнено для помещения роликов 22. Ролики 22 гидродинамически опираются на наружном кольце 21 и образуют часть внутренней геометрии наружного кольца 21. Эксцентрически к центру 24 вращения установлен вращающийся поршень 20, имеющий центр 25 вращения. Вращающийся поршень 20 с геометрическим замыканием соединен с карданным валом 12. Между вращающимся поршнем 20 и наружным кольцом 21 за счет геометрии вращающегося поршня 20 и наружного кольца 21 образуется в каждом случае окружная, изменяющаяся в объеме камера 23, в которой вследствие распределения давления, возникающего в гидравлической жидкости 8, вращающийся поршень 20 движется по круговой траектории 26 концентрически к центру 24 вращения.
Эксцентрически к центру 24 вращения установлен вращающийся поршень 20, имеющий центр 25 вращения. Вращающийся поршень 20 с геометрическим замыканием соединен с карданным валом 12. Между вращающимся поршнем 20 и наружным кольцом 21 за счет геометрии вращающегося поршня 20 и наружного кольца 21 образуется в каждом случае окружная, изменяющаяся в объеме камера 23, в которой вследствие распределения давления, возникающего в гидравлической жидкости 8, вращающийся поршень 20 движется по круговой траектории 26 концентрически к центру 24 вращения.
На фиг. 4 показан автомобиль 3, имеющий гидравлический привод 2 колес. Гидравлический привод 2 колес включает в себя устройство 1, которое полностью помещено соответственно в пределах геометрии левого колеса 9 и правого колеса 10. Левое колесо 9 и правое колесо 10 через неподвижную ось 5 соединены с автомобилем 3. В этом примере показан узел 27 привода, который через традиционный ведомый вал 32 осуществляет привод ведомой оси 28 и отдает отбираемый момент 29. В показанном примере привод насоса 30 тоже осуществляется ведомым валом 32, и созданное давление по трубопроводам 31 передается в устройство 1. Благодаря этому подключаемый или, соответственно, отключаемый крутящий момент 7 передается на левое колесо 9 и правое колесо 10. Отбор мощности через ведомую ось 28 при необходимости может отключаться также во время эксплуатации устройства 1.
В показанном примере привод насоса 30 тоже осуществляется ведомым валом 32, и созданное давление по трубопроводам 31 передается в устройство 1. Благодаря этому подключаемый или, соответственно, отключаемый крутящий момент 7 передается на левое колесо 9 и правое колесо 10. Отбор мощности через ведомую ось 28 при необходимости может отключаться также во время эксплуатации устройства 1.
С помощью настоящего изобретения достигается возможность преодоления транспортным средством непроходимых участков в условиях бездорожья, при этом предлагаемое изобретением устройство может отключаться в дорожных условиях. Кроме того, устройство может подключаться для рекуперации силы торможения.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Устройство
2 Привод колес
3 Автомобиль
4 Колесный фланец
5 Неподвижная ось
6 Роторно-поршневой привод колес
7 Крутящий момент
8 Гидравлическая жидкость
9 Левое колесо
10 Правое колесо
11 Муфта сцепления
12 Карданный вал
13 Подводящий трубопровод
14 Отвод
15 Тормозной диск
16 Тормозная накладка
17 Дисковое колесо
18 Шкворень поворотной цапфы
19 Шина
20 Вращающийся поршень
21 Наружное кольцо
22 Ролики
23 Камера
24 Центр вращения
25 Центр вращающегося поршня
26 Круговая траектория
27 Узел привода
28 Ведомая ось
29 Отбираемый момент
30 Насос
31 Трубопровод
32 Ведомый вал
33 Поперечная рулевая тяга
34 Рычаг поворотной цапфы (изображен в виде серповидного рычага)
35 Поворотная цапфа
36 Распределитель масляного потока.
Гидропривод транспортного средства 4-Trac | СП-Гидропривод
Принципиальная схема гидропривода 4-Trac (привода на все колеса)
Гидравлическая схема привода
Обозначения:
102 Фильтровальный патрон — 10 мкм
109 Масляный радиатор
110 Масляный бак
112b Сетчатый фильтр привода ходовой части и рулевого управления
203 Привод 4-Trac, радиально-поршневой гидромотор слева
204 Привод 4-Trac, радиально-поршневой гидромотор справа
205 Шестеренчатый насос рабочей гидравлики — 19 или 14 см3/об.
207 Аксиально-поршневой нерегулируемый гидромотор — 100 см3/об.
208 Привод ходовой части, регулируемый гидронасос.. Rexroth 90 R 100/130
209 Питательный насос — 26 см3/об.
211 Аксиально-поршневой регулируемый гидронасос — Rexroth 100 / 130 см3/об.
217 Насос привода корзины радиатора — 5,5 см3/об.
218 Шестеренчатый насос рулевого управления — 11 см3/об.
313 Сервоцилиндр
401 Диафрагма A
406 Диафрагма — Ø 0,8 мм
412 Диафрагма — Ø 2 мм
515 Гидроаккумулятор — 0,75 л
606 Сервоклапан
701 Клапан регулирования потока 4-Trac
706-5 Клапан ограничения давления
708 Клапан отсечки давления — 420+30 бар
709 Питательный клапан — 0,7 бар
710 Байпасный клапан — 3 бар
711 Клапан ограничения высокого давления — 430+30 бар
713 Мультифункциональный клапан назад
714 Мультифункциональный клапан вперед
716 Клапан ограничения давления питания — 30±2,5 бар
719 Промывочный клапан
720 Подпорный клапан — 7 бар
721 Переключающий клапан
731 Клапан обратной линии (обратный клапан)
732 Обратный клапан
747 Клапан короткого замыкания
750 Тормозной дроссельный клапан
751 Внешний питательный клапан (обратный клапан)
773 Регулятор давления
774 Подпорный клапан
777 Главный управляющий клапан Привод 4-Trac (привод на все колеса) вкл./выкл.
788 Привод 4-Trac Overdrive, промывочный клапан
789 Привод 4-Trac Overdrive, подключающий клапан
Y1 Электромагнитный клапан привода на все колеса / 4Trac (управляющий клапан)
Y124 Тормозной дроссель гидравлики ходовой части (HBM)
Y126 Электромагнитный клапан Привод 4-trac Overdrive
Клапанный узел MUD HOG
Описание функций:
Через соответствующую сторону высокого давления в контуре высокого давления (А/В) производится переключение перекидного клапана (702), так что через соответствующую сторону низкого давления всегда имеется подпиточное давление на электромагнитном клапане (Y1). В зависимости от коммутационного положения электромагнитного клапана (Y1) подпиточное давление подается в зону пружины -ВЫКЛ.- или на противоположную сторону — ВКЛ.- управляющего золотника (777). Управляющий золотник (777) затем открывает поток масла (А/В) через соответствующий клапан регулирования потока (701) к колесным двигателям через выводы А1-А2 или В1-В2. Соответствующая обратная линия колесных двигателей В1-В2 или А1-А2 проходит через клапан обратной линии (731) на другой уровень клапанного узла к стороне низкого давления (В/А).
Клапаны регулирования потока (701) управляют дифференцированным потоком масла к колесным двигателям, с целью предотвращения ухода масла на более легкоходную сторону одного из обоих колесных двигателей. При этом колесный двигатель с большей нагрузкой создает подпорное давление на золотнике регулирования потока, который затем прикрывает кромку управления на противоположной стороне и обеспечивает балансировку уровня давления нагрузки обеих сторон.
Быстродействующий клапан (782)
При выключении привода 4-Track включается также быстродействующий клапан (782) и разгружает при этом напорную сторону двигателей через линия утечек масла в корпус. Небольшой поток масла через диафрагму (406) обеспечивает надежное положение покоя поршней в двигателях, так как обратный клапан (732-2) обеспечивает подпор корпуса двигателя.
Радиально-поршневой гидромотор POCLAIN
Описание функций:
Колесный двигатель выполнен в виде радиально-поршневого двигателя, при буксировке нет необходимости механически отсоединять его от привода. Если на двигатель передается усилие от ведущего колеса, то криволинейная направляющая (В) вытесняет десять поршней (К) в цилиндрический ротор (Z), благодаря чему колесная ступица может свободно вращаться. При подключенном приводе на все колеса масло подается на вывод А или В двигателя, в зависимости от направления движения. Распределительный блок (V) подает его при этом на поршни (К), находящиеся в ниспадающей позиции криволинейной направляющей (В).
Ролик на поршне (К) вследствие этого отталкивается от криволинейной направляющей (В) и приводит цилиндрический ротор (Z) во вращательное движение, которое через зубчатое зацепление переносится на колесную ступицу. Если поршень (К) перемещается по возрастающему профилю криволинейной направляющей (В), то масло вытесняется на сторону низкого давления контура высокого давления через цилиндрический ротор (Z) и распределительный блок (V).
Клапанный блок для 2-ступенчатого радиально-поршневого двигателя POCLAIN
Описание функций:
Для функции 4-Track Overdrive используются 2-ступенчатые радиально-поршневые двигатели. Функция Overdrive ВЫКЛ. Внутри каждого радиально-поршневого двигателя (203/204) два роторных комплекта параллельно соединены друг с другом через подключающий клапан (789). При двойном объеме поглощения скорость движения (скорость вращения) радиально-поршневых двигателей (203/204) снижается при одновременном увеличении передаваемого момента вращения.
Функция Overdrive ВКЛ. При включенном электромагнитном клапане 4-trac Overdrive (Y126) два роторных комплекта соединяются друг с другом последовательно через подключающий клапан (789). При уменьшенном объеме поглощения снижается передающий момент радиально-поршневых двигателей (203/204) при одновременном повышении скорости движения (скорости вращения).
Регулируемый двигатель
Описание функций: 1/4
Привод на все колеса представляет собой управляемый ведущий мост, каждое колесо которого приводится в действие аксиально-поршневым регулируемым двигателем со встроенным колесным редуктором. Гидравлическое обеспечение выполнено параллельно с гидростатическим замкнутым контуром машины. При возникновении проскальзывания (снижения тяги) на ведущем или управляемом ведущем мосту оно опознается и устраняется регулированием. Также и при затруднительных тяговых условиях система старается обеспечивать максимальную скорость уборки. Система определяет действительную скорость вращения каждого двигателя и на основе соответствующих данных машины (диаметр колеса, механическое передаточное отношение, количество импульсов в минуту и т.д.) рассчитывает окружную скорость колеса.
Эталон — при движении по прямой скорость самого медленного колеса используется в качестве базовой для остальных колес. Принимается, что эта скорость отображает скорость транспортного средства. Регулируемый двигатель быстро вращающегося колеса переводится в направлении небольшого объема поглощения (Qмин.). Передаваемый приводной момент медленно вращающегося колеса увеличивается.
Регулирование аксиально- поршневых регулируемых двигателей (2063, 2064)
Регулируемый двигатель при этом находится в своем исходном положении с минимальным объемом поглощения. При помощи электромагнитной катушки с широтно-импульсной модуляцией (Y281, Y282) при этом из соответствующего контура высокого давления через переключающий клапан установочного давления двигателя привода ходовой части (7128, 7129) генерируется переменное давление управления на гидроцилиндр сервоуправления двигателем привода ходовой части (3146, 3147).
LTA ВЫКЛ. Вся система не активна.
В этом случае электромагнитные катушки регулирования аксиально- поршневого двигателя системы 4-Trac (Y281, Y281) обесточены. Регулируемые двигатели системы 4 -Trac (2063, 2064) установлены на минимальный объем поглощения (Qмин. = 0 литров).
LTA ВКЛ.
При разблокированном выключателе движения по дорогам (S52) и включенной системе 4-Trac (S4) электромагнитные катушки регулирования аксиально-поршневого двигателя системы 281-Trac (Y281, Y281) отдельно управляются с широтно-импульсной модуляцией в зависимости от:
— актуальной скорости
— смещения рычага движения
— соответствующего угла поворота
— направления движения производится регулирование объема поглощения аксиально- поршневых двигателей.
— Скорость Частота, замеренная сенсорами скорости вращения аксиально- поршневых двигателей системы 4-Trac (B203, B204), опознается в качестве скорости вращения (эффект Холла) и вводится в модуль управляемого ведущего моста (A79) в качестве сигнала. При скорости 0 км/час через электромагнитные катушке течет полный ток ок. 1300 мА, двигатели (2063, 2064) полностью выведены (Qмакс. = 50 см3).
— Рычаг движения
Начиная с 50% смещения рычага движения аксиально-поршневые двигатели (2063, 2064) переводятся в направление Qмин.
— Угол поворота рулевого управления
При движении на поворотах скорости колес устанавливаются в пропорциональной зависимости от их круга поворота, то есть воздействие рулевого управления учитывается в процессе регулирования.
Необходимый сигнал, касающийся положения рулевого управления, поступает от сенсора угла поворота колес автопилота (B6 . см. электрооборудование, схему 28) и по шине CAN подается на модуль управляемого ведущего моста (A79). Необходимо соответствующим образом отконфигурировать движение по прямой и размеры шин
Направление движения (Опознавание направления вращения)
Сенсоры скорости вращения системы 4-Trac (B203, B204) дополнительно могут опознавать соответствующее направление движения (направление вращения). При резком замедлении машины благодаря опознаванию направления вращения аксиально- поршневые двигатели переводятся на минимальный объем поглощения (Qмин. = 0 литров), этим предотвращается вращение двигателей в обратную сторону.
Сенсоры скорости вращения системы 4-Trac (B203, B204) работают по принципу сенсора Холла, они благодаря двум сигнальным микросхемам (A/B) могут опознавать полярность магнитного поля. При этом полярность северный полюс соответствует низкому уровню сигнала, а южный полюс — высокому уровню сигнала.
Сигнальные микросхемы установлены со смещением на 22° относительно кольцевой оси и благодаря этому обеспечивают перекрытие, равное ½ от длины полюса. Это означает, что при определенном направлении вращения микросхема A видит один полюс первой, и лишь затем этот же полюс опознается микросхемой B. Генерированные сигналы смещены по фазе на 90°. Правильное положение установки сенсоров скорости вращения системы 4-Trac (B203, B204) задано конструктивным образом.
Регулирование против проскальзывания слева — справа Различия в скорости вращения опознаются сенсором скорости вращения аксиально-поршневого двигателя системы 4-Trac (B203, B204). Регулируемый двигатель быстро вращающегося колеса переводится в направлении небольшого объема поглощения (Qмин.). Передаваемый приводной момент медленно вращающегося колеса увеличивается. впереди сзади. Также и здесь регулируемый двигатель (впереди / сзади) быстро вращающегося моста или колес переводится в направлении небольшого объема поглощения (Qмин.). Передаваемый приводной момент медленно вращающегося моста / колес увеличивается. Коммуникация между модулем привода ходовой части (A49) и модулем управляемого ведущего моста (A79) для опроса скорости вращения выполняется по шине CAN.
Гидравлическая трансмиссия в автомобилях
Компания Renault испытывает на своих легковых автомобилях трансмиссию с гидроприводом, которая в будущем может стать альтернативой системе полного привода с подключаемым вторым мостом. Так называемая гидрообъемная трансмиссия работает по принципу передачи рабочей жидкости под высоким давлением, создаваемым специальным насосом, которая реализуется в виде крутящего момента на валу гидромотора, установленного либо на оси ведущих колес, либо таких гидромоторов может быть два — по одному непосредственно в ступице каждого колеса.
До настоящего времени гидротрансмиссия на легковых серийных автомобилях не применялась, хотя она уже давно широко используются на спецтехнике, однако, такая установка может работать в качестве вспомогательной системы подключаемого полного привода, например, на задней оси у автомобилей с постоянным ведущим передком, где можно обойтись без раздаточной коробки, карданного вала, заднего редуктора и более сложной задней подвески. Основной недостаток гидравлической трансмиссии — существенная потеря мощности, поскольку при такой схеме происходит двойное преобразование энергии — из механической в гидравлическую и обратно; кроме того, гидронасосы и гидромоторы нуждаются в более высококвалифицированном обслуживании, чем традиционная механическая трансмиссия.
По предположению издания «Авторевю», в Renault испытывают подобную систему французской компании Poclain Hydraulics, предлагающей компактное решение под названием AddiDrive с интегрированным в коробку передач гидронасосом и установкой либо одного 30-киловаттного гидромотора с дифференциалом и полуосями, либо пары мотор-колес. Как и в случае с традиционной системой подключаемого полного привода, в обычных дорожных условиях гидропривод не активен, но автоматически срабатывает при пробуксовке передних колес и работает на скоростях до 40 км/ч.
Пока неизвестно, найдет ли серийное применение такая экзотическая трансмиссия в «Логанах» и «Сандеро», хотя два полноприводных экземпляра этих моделей даже были доставлены для тестов в Тольятти весной 2016 года. Возможно, на АвтоВАЗе испытывают «гидравлику» для других перспективных моделей, например, для будущей Lada Xray Cross или некоего мифического кроссовера на логановской основе. На данный момент использовать такое решение было бы логичным на полноприводной модификации Renault Sandero Stepway, которой пока не существует, поскольку полностью механическая трансмиссия от «Дастера» для этого кросс-хэтча представляется слишком громоздкой. В любом случае, если Renault Logan 4×4 и Renault Sandero 4×4 имеют шанс стать серийными, то это случится не раньше 2018 года.
Гидравлический привод тормозов и колесный тормоз
На каких автомобилях устанавливается тормозная система с гидравлическим приводом, как она устроена?
Тормозная система с гидравлическим приводом устанавливается на всех легковых и грузовых автомобилях средней и небольшой грузоподъемности. В устройство такой системы (например, автомобиля ГАЗ-24 «Волга») входят (рис.144, а): колесные тормозные цилиндры 3 и 7; главный тормозной цилиндр 4 с резервуаром для тормозной жидкости; тормозная педаль 5, установленная в кабине автомобиля; гидровакуумный усилитель 1; разделитель 2; соединительные трубопроводы и шланги 6. Вся система заполнена тормозной жидкостью, обладающей смазочными свойствами и низкой температурой застывания, что обеспечивает нормальную работу тормозной системы и в холодное время года. Обычно в состав тормозной жидкости входят 50% касторового масла и 50% бутилового или изоамилового спирта (по массе). Могут быть и другие компоненты. Отечественная промышленность для автомобилей выпускает тормозные жидкости марок БСК, «Нева» и другие.
Рис.144. Гидравлический привод тормозов и колесный тормоз:
а – общее устройство; б – тормоз заднего колеса; в – тормоз переднего колеса.
Как работает тормозная система с гидравлическим приводом?
Работает тормозная система с гидравлическим приводом так. При нажатии на тормозную педаль жидкость из главного тормозного цилиндра по трубопроводам и шлангам через гидровакуумный усилитель и разделитель под давлением поступает к рабочим тормозным цилиндрам, где воздействует на поршни, а они на тормозные колодки, которые прижимаются к вращающимся тормозным барабанам. Между ними возникает трение и автомобиль останавливается. Чтобы продолжать движение, необходимо отпустить тормозную педаль. При этом под воздействием стяжных пружин жидкость возвращается в главный тормозной цилиндр и его резервуар, а тормозные колодки отходят от тормозных барабанов. Между колодками и барабаном образуется зазор и автомобиль снова может двигаться. Следовательно, тормоза поглощают кинетическую энергию движущегося автомобиля и превращают ее в тепловую. Очевидно, что при каждом торможении изнашиваются трущиеся пары, шины и другие части автомобиля. Несмотря на указанные потери, на каждом автомобиле должна быть надежная и эффективная тормозная система, обеспечивающая ему быструю и эффективную остановку в критических ситуациях на дороге.
Как устроен и работает колесный тормоз?
Колесный тормоз с гидравлическим приводом состоит из опорного тормозного диска 22 (рис.144, б, в), жестко прикрепляемого к поворотным цапфам передних колес и раструбам картера заднего моста. На опорном диске на эксцентричной шайбе 18, опирающейся на палец 17, установлены тормозные колодки 10 с фрикционными накладками. Вторыми концами колодки упираются в поршни 20 рабочих тормозных цилиндров, жестко прикрепляемых к опорным тормозным дискам и с помощью шлангов и трубопроводов соединяющихся с главным тормозным цилиндром 4. Над колодками вращается тормозной барабан, жестко соединяемый со ступицей колеса. Колодки стягиваются стяжными пружинами 14 и устанавливаются таким образом, что между их накладками и барабаном образуется зазор, обеспечивающий свободное вращение колеса.
В рабочем тормозном цилиндре выполнены два отверстия: 6 – для соединения с главным тормозным цилиндром и 8 – для установки клапана прокачки тормозной системы с целью удаления проникшего в систему гидропривода воздуха. В цилиндре заднего колеса расположены два поршня 11 с уплотнительными резиновыми кольцами 12. На передних колесах устанавливаются два рабочих цилиндра, имеющие по одному поршню с уплотнительными резиновыми кольцами. Каждый поршень воздействует на свою колодку. На всех поршнях выполнен буртик 21, благодаря которому удерживается пружинное упорное стальное кольцо 13, обеспечивающее автоматическую регулировку зазора между колодкой и барабаном по мере их износа. Кольцо установлено таким образом, что между ним и буртиком поршня имеется зазор 1,9-2,06 мм. Упругость кольца 500 Н, а стяжной пружины 250 Н.
При нажатии водителем на тормозную педаль давление тормозной жидкости в рабочем тормозном цилиндре достигает 1000 Н. Под действием этого давления поршень выдвигается из цилиндра, увлекая за собой стальное кольцо и растягивая стяжную пружину, прижимает колодку к барабану и этим выбирает зазор, образовавшийся в результате естественного износа, и осуществляет торможение автомобиля. При отпускании тормозной педали стяжная пружина 14 стягивает тормозные колодки и через них воздействует на поршни, возвращая их в цилиндр. Однако они не могут возвратиться в первоначальное положение, так как упругость стяжной пружины меньше упругости распорного кольца. Следовательно, поршень может возвратиться только до упора в кольцо. Зазор между буртиком поршня и кольцом обеспечивает отход колодки от барабана и позволяет свободно вращаться колесу, т. е. продолжать движение автомобиля.
На тормозных механизмах задних колес монтируется привод стояночного тормоза, воздействующего на колодки 10 рабочего тормоза. Так как привод стояночного тормоза механический и он воздействует на тормозные колодки рабочего тормоза, то на автомобиле ГАЗ-24 «Волга» он выполняет функции и запасного тормоза, т. е. им можно пользоваться для торможения автомобиля в случае отказа гидравлического привода. К деталям стояночного тормоза относятся: рычаг 16, разжимной стержень 15, маятник 9 и регулировочный эксцентрик 19.
В чем особенность устройства колесного тормоза автомобиля ГАЗ-53А?
Колесный тормоз автомобиля ГАЗ-53А устроен так же, как и автомобиля ГАЗ-24 «Волга», но в нем отсутствуют детали стояночного тормоза, устройство для автоматической регулировки зазора между тормозными накладками и барабаном, на всех колесах имеется по одному рабочему цилиндру. Для регулировки зазора между колодкой и барабаном под каждую колодку в средней части устанавливается эксцентрик, головка которого выведена наружу на опорный тормозной диск.
***
Проверьте свои знания и ответьте на контрольные вопросы по теме «Тормозная система»
автомобиль, барабан, колесо, колодка, поршень, привод, система, тормоз, тормозной, цилиндр
Смотрите также:
Приложение — Коммерсантъ Авто (90563)
Daimler AG стала третьей компанией среди производителей европейской «большой семерки», которая серийно применила на своих строительных грузовиках гидрообъемный привод. У швабов он получил наименование HAD (Hydraulic Auxiliary Drive), что переводится как вспомогательный гидравлический привод.
Система предназначена для решения определенных транспортных задач, когда в использовании постоянного полного привода нет нужды. Гидрообъемный привод можно задействовать, например, при пробуксовке задних ведущих колес на раскисших грунтовых дорогах и тому подобных покрытиях. К достоинствам этого квазиполного привода в сравнении с постоянным или жестко подключаемым полным можно отнести меньший вес и высоту шасси, лучшую маневренность, отсутствие дополнительных трущихся деталей, а значит, вероятность их износа и поломки, экономичность и универсальность применения за счет кратковременного увеличения тяги в тяжелых дорожных условиях.
Первым в 2006 году систему передачи крутящего момента на передние колеса применил MAN. Называется она HydroDrive. Четырьмя годами позже свою версию под названием Optitrack представила Renault Trucks. При всей схожести принципа действия — гидронасос посредством электромагнитного клапана распределяет потоки масла через шланги гидросистемы к встроенным в ступицы колес передней оси гидромоторам — имеется у них и принципиальное различие в конструкции привода. У HydroDrive привод гидросистемы осуществляется от коробки отбора мощности (КОМ) на коробке передач, а у Optitrack — от КОМ на двигателе. Схема, предложенная мерседесовцами, ближе к Optitrack: привод гидронасоса от двигателя, да и расположение маслобака и системы охлаждения похожее — на лонжероне рамы; у MAN это хозяйство запрятано между лонжеронами. Кстати, у всей троицы один и тот же поставщик гидравлики — французская компания Poclain Hydraulics.
Итак, что же представляет собой HAD? Функции раздаточной коробки, дополнительного кардана и дифференциала здесь выполняют гидронасос, блок электромагнитных распределительных клапанов (он распределяет потоки масла от гидронасоса к гидромоторам), трубопроводы гидросистемы и встроенные в ступицы передних колес гидромоторы суммарной мощностью 80 кВт (максимальный крутящий момент каждого колеса — 6250 Нм.) Отсюда небольшой собственный вес HAD, составляющий всего 400 кг. Для сравнения: компоненты полного привода как минимум вдвое тяжелее. Система активируется нажатием клавиши на приборной панели, по достижении скорости 25 км/ч она автоматически переходит в пассивный режим, а на 60 км/ч отключается вовсе. При этом расход топлива у автомобиля с HAD на 8-10% ниже по сравнению с полноприводным. К достоинствам вспомогательного полного привода можно отнести также и то, что система не нуждается в обслуживании, а гидравлические магистрали проложены таким образом, что поворот колес не влечет перемещения шлангов, что положительно сказывается на их долговечности.
Гидросистема состоит из трех магистралей. Контур высокого давления передает рабочее давление, которое может достигать 450 бар, на передние мотор-колеса. Контур низкого давления создает давление до 30 бар и предназначен для управления системой вспомогательного гидропривода — в частности, он удерживает поршни мотор-колес в исходном положении, когда в них нет необходимости. Кроме того, магистраль низкого давления соединяется с системой охлаждения. Наконец, дренажный трубопровод, который отвечает за возвращение обратки в гидробак.
Какова цена вопроса? Стоимость HAD примерно €18 тыс. Однако абсолютная величина еще не показатель. Если сравнивать автомобили в аналогичной комплектации, то машина с HAD окажется дороже полноприводной с постоянным приводом всех колес на €5 тыс., а с подключаемым — на €7,5 тыс. Прежде всего HAD предназначен для строительных грузовиков MB Arocs с колесными формулами 4х2, 6х2 и 6х4, причем исключительно с пневмоподвеской заднего моста. Последнее обстоятельство требует пояснения. Дело в том, что швабы все же позиционируют HAD прежде всего как специфическое предложение для определенных условий эксплуатации, а не как альтернативу полноценному полному приводу. Отсюда и нежелание провоцировать клиентов на замену полноприводных машин с механической подвеской. Помимо Arocs вспомогательным гидроприводом могут также оснащаться и грузовики семейств Actros и Antos.
Автору этих строк довелось опробовать систему в деле. Место действия — каменный карьер Эркенбрехтсвайлер в Швабских Альбах. На автопоезде полной массой 40 тонн в составе седельного тягача MB Arocs 1845 LS (4х2) в сцепке с самосвальным полуприцепом, загруженным щебнем, мы некоторое время петляли по узким каменистым дорожкам, пока не добрались до коварного участка с рыхлым гравием глубиной до полуметра. Здесь главное — вовремя почувствовать, когда колеса начнут закапываться, и остановиться, иначе никакой HAD не поможет. На практике доказано, что обычный автопоезд даже с заблокированным дифференциалом зароется здесь метров через 50. Сидящий в кресле пассажира инструктор рекомендует перейти на ручной режим КП и не подниматься выше второй передачи, заблокировать задний дифференциал и активировать систему вспомогательного гидропривода. Щелчок клавишей, и на центральном дисплее загорается соответствующий символ белого цвета, затем надо от души наступить на педаль газа, дабы создать давление в гидросистеме, и только после этого можно начинать движение. При работающей системе символ на дисплее меняет цвет на голубой и автопоезд медленно, но верно выбирается из гравийной ловушки.
Таким образом, можно констатировать, что отныне в арсенале MB Arocs помимо классического заднего привода есть еще три варианта передачи крутящего момента на передние колеса. Для постоянной эксплуатации на плохих дорогах предусмотрен постоянный привод на все колеса через двухступенчатую раздаточную коробку с блокируемым межосевым дифференциалом. Второй вариант полноприводной трансмиссии — жестко подключаемый привод переднего моста. При этом используются ведущие мосты без колесных редукторов. Наконец, для улучшения проходимости автомобилей, большую часть времени проводящих на хороших дорогах, предлагается вспомогательный гидравлический привод — HAD.
Александр Солнцев
|
Система HydroDrive появилась в результате анализа часто встречающихся в жизни ситуаций, наподобие той, что я опишу. Чтобы доставить груз, например строительные материалы, грузовику необходимо съехать с асфальтового шоссе и спуститься по крутому уклону, покрытому щебнем. После разгрузки у ненагруженной ведущей задней оси не хватает сцепления колес с грунтом, чтобы автомобиль мог подняться обратно в гору. Ситуацию спас бы привод на все колеса, однако при данном режиме эксплуатации большую часть рабочего дня он оставался бы ненужным. Как решить проблему? Инженеры компании внедрили в производство очень интересную систему MAN HydroDrive, пока единственную в своем роде. Главными элементами системы являются гидравлические (гидрообъемные) моторы, располагаемые внутри ступиц передних колес. Именно они обеспечивают дополнительную тягу на передней оси. Новая система идеально подходит для грузовиков, большую часть времени передвигающихся по хорошим дорогам. А устанавливать ее начали на самые различные версии грузовиков серии TGA – седельные тягачи, самосвалы и грузовики различного назначения с полной массой более 18,0 т. В нормальных условиях тягачи, оборудованные системой MAN HydroDrive, эксплуатируются как обычно, с приводом на задние колеса. А на мягком грунте, на строительных площадках или на зимних дорогах при необходимости водители подключают дополнительную тягу. Делается это с помощью тумблера, расположенного на панели приборов. Теперь оба мотора в ступицах колес переднего моста с гидростатическим приводом обеспечивают дополнительную тягу и повышенную курсовую устойчивость. Подключить систему можно как в порожнем, так и в загруженном состоянии, при скорости не выше 30 км/ч. При достижении этой скорости система автоматически отключается, и далее автомобиль движется с приводом на задние колеса. Грузовики с системой MAN HydroDrive имеют дорожный просвет, соответствующий автомобилям с обычным приводом, предназначенным для передвижения по хорошим дорогам. Кроме этого сохраняется стандартная высота шасси, облегчающая водителю посадку и высадку. Высота седельно-сцепного устройства имеет обычный уровень, позволяющий использовать стандартные полуприцепы. Система делает ненужными передние мосты с карданным приводом, а также раздаточные коробки и главные передачи на передних осях. За счет этого достигается увеличение полезной нагрузки до 300 кг. Еще одним существенным преимуществом является снижение расхода топлива: при нормальных условиях эксплуатации он остается на уровне автомобиля с задним приводом, предназначенным для движения по асфальтовым дорогам. Система MAN HydroDrive состоит из гидравлического насоса высокого давления, двух гидромоторов в ступицах колес переднего моста, одного резервуара для масла, охладителя масла и клапанного блока. Каждый из моторов ступиц колес переднего моста состоит из одного блока цилиндров. Цилиндры в нем размещены в форме звезды. В блоке цилиндров находятся специальные поршни с крутящимися роликами. Ролики находятся в контакте с волнообразным контуром кулачковой обоймы, опоясывающей блок снаружи. При включении привода гидравлический насос, присоединенный фланцем к выходному валу коробки передач, нагнетает в моторы масло под давлением до 420 бар. Тяга достигается за счет того, что давление подается попеременно на определенные цилиндры, в то время как из других цилиндров масло вытекает. В цилиндрах, находящихся под давлением, поршни выдавливаются наружу, ролики упираются в кулачковую обойму, и возникает крутящий момент.
|
Новости
DAF предлагает гидравлический привод передних колес, который можно подключить одним нажатием
Для грузовиков, которые большую часть времени проводят на дорогах, но иногда вынуждены передвигаться по бездорожью или скользкому дорожному покрытию, DAF предлагает гидравлический привод передних колес, который можно подключить одним нажатием. Новая система привода «PXP» разработана совместно с Paul Nutzfahrzeuge и будет доступна для тягачей DAF CF и XF 4×2 с двигателем PACCAR MX-11 или MX-13. Для других типов шасси такая возможность появится позднее в этом году.
Постоянный полный привод для грузовиков, которые редко выезжают на бездорожье, обычно означает значительные затраты на его покупку, техническое обслуживание и расход топлива. Однако иногда очень важно иметь дополнительный привод для преодоления канав, песчаных дорог, неасфальтированных разгрузочных площадок и крутых склонов.
Для таких сложных случаев компания DAF предлагает версии тягачей CF и XF 4×2 с гидравлическим приводом передних колес, который можно подключить с помощью переключателя на приборной панели. Если автомобиль определяет проскальзывание ведущих колес, PXP — «Paul Xtra Power» — подключается автоматически. Чем больше проскальзывание задних колес, тем больше тягового усилия передается на передние колеса.
Подключение доступно до 4-йпередачи
Подключаемый передний привод DAF доступен на первых четырех передачах при движении вперед и первой и второй передачах заднего хода. При скорости выше 20 км/ч (и/или на 5-йпередаче и выше) PXP возвращается в режим ожидания. Система снова включается на более низких скоростях, если ее применение необходимо.
Удобство управления и эффективность полностью сохранены
Для подключения переднего привода каждая колесная ступица переднего моста оборудована радиально-поршневым гидравлическим мотором, создающим крутящий момент не менее 6435 Нм при максимальном давлении в системе 360 бар. Это обеспечивает оптимальную производительность, долговечность и надежность. Уникальная особенность заключается в том, что гидромоторы приводятся в действие гидравлическим насосом, установленным непосредственно на МОМ двигателя, что позволяет снизить общий вес и сэкономить пространство. Кроме того, гидравлический насос может управлять такими компонентами, как краны, крюковые погрузчики, стабилизаторы и системы скипового погрузчика для максимально эффективной эксплуатации автомобиля. Таким образом автомобилю достаточно одного гидравлического бака — а это также означает снижение собственной массы и экономию пространства.
Благодаря новой системе PXP компания DAF вновь продемонстрировала свое умение создавать оптимальные решения для любых транспортных задач. Кроме того, регулируемый привод передних колес DAF обеспечивает особые преимущества с точки зрения производительности, массы и занимаемого пространства на шасси.
Информация о доступности к заказу автомобилей DAFCF и XF в комплектации с подключаемым приводом передних колес в России будет предоставлена позже, после проведения необходимых работ по сертификации.Привод транспортного средства с гидравлическими двигателями — Часть 1
Колесные двигатели. Рисунок 1. Несколько производителей производят гидравлические двигатели, специально предназначенные для привода колес транспортных средств. Поскольку эти двигатели должны нести часть веса транспортного средства в качестве боковой нагрузки на вал, монтажный фланец расположен на небольшом расстоянии за передней поверхностью. Это не только позволяет переносить вес транспортного средства непосредственно на подшипники вала, но и делает конструкцию более компактной, при этом часть двигателя утоплена в ступице колеса.
Колесные двигатели, независимо от их номинальной мощности, рассчитаны на большой кубический дюйм рабочего объема за один оборот. Это дает им высокий выходной крутящий момент и приводит их скорость в соответствие со скоростью автомобиля, исключая редукторы коробки передач.
Поскольку они напрямую связаны с колесом, на каждом колесе, которое должно приводиться в действие, должен использоваться отдельный двигатель. Несколько колес не могут приводиться в движение одним колесным двигателем.
Рис. 1. Низкоскоростной мотор колеса с высоким крутящим моментом.
Стандартные двигатели. В то время как любой гидравлический двигатель может использоваться для привода колес, скорость стандартных двигателей слишком высока, а их крутящий момент слишком мал для прямого привода на колеса. Они должны соединяться либо через редуктор скорости коробки передач, либо через цепной редукторный привод. Однако один двигатель может приводить в движение несколько колес, которые механически соединены вместе.
Сцепление с дороги
Максимальное тяговое усилие автомобиля достигается непосредственно перед тем, как ведущие колеса начинают вращаться.Когда ведущее колесо начинает вращаться, его тяга снижается, иногда почти до нуля. Для оптимальной работы транспортного средства гидромоторы привода колес должны обеспечивать достаточный крутящий момент в самых неблагоприятных условиях эксплуатации для достижения условий пробуксовки колес. Но крутящий момент, превышающий этот уровень, не имеет значения.
Тяговое усилие определяет сцепление колеса с приводом (или тормозом) с поверхностью дороги и обычно выражается как величина горизонтальной силы (тяга дышла) в фунтах, которая может быть приложена к поверхности дороги без проскальзывания.Тяговое усилие зависит не только от крутящего момента двигателя, но и от материалов, из которых изготовлено колесо и дорожное покрытие, и прямо пропорционально силе (весу транспортного средства), заставляющей их соприкасаться. Следовательно, при проектировании автомобиля важно учитывать количество колес, на которые необходимо приводить привод, и распределение веса по каждому колесу.
Для простых транспортных средств, работающих на ступени I-level, может быть достаточно приложения тягового усилия только к одному колесу. Если возможно, это должно быть колесо, несущее наибольший вес.В более сложных приложениях, включающих подъемы в гору, быстрое ускорение или на транспортных средствах, тянущих прицеп, может потребоваться приложить тяговое усилие к двум или более колесам для получения достаточного тягового усилия. Преимущество привода нескольких колес заключается в том, что автомобиль с меньшей вероятностью заглохнет из-за скользких пятен на дорожном покрытии.
Рисунок 2. Тяга максимальна непосредственно перед пробуксовкой колес.
Колеса с несколькими приводами. Дополнительные колеса могут приводиться в движение с помощью отдельного гидравлического колесного двигателя на каждом колесе, при этом все они получают жидкость от общего насоса. Колеса или группы колес могут механически соединяться и приводиться в действие общим насосом. В этом случае вместо колесных двигателей необходимо использовать стандартные двигатели. Роликовая цепь часто является удобным способом сцепления двух или более колес с одной стороны транспортного средства, если скорость находится в безопасном диапазоне роликовой цепи. Если расстояние между колесами настолько велико, что цепь может чрезмерно провисать под собственным весом, она может быть заключена в направляющие или опоры.
При соединении колес на противоположных сторонах транспортного средства, если это целесообразно, предпочтительнее использовать неразрезной мост. Должен использоваться стандартный, а не колесный двигатель, и его можно подключить через цепную передачу на оси.
Если необходимо использовать разделенную ось с дифференциалом (для поворота на углах), стандартный двигатель может быть соединен с входным валом коробки дифференциала. Однако раздельные оси не следует использовать без необходимости, поскольку транспортное средство становится более чувствительным к распределению нагрузки. При неравномерном распределении нагрузки общее тяговое усилие будет значительно меньше, чем при использовании неразрезной оси.
Как рассчитать сцепление с дорогой
Тяга — это адгезионное трение колеса о поверхность, по которой оно катится. Общая тяга транспортного средства может быть или не быть суммой тяги, развиваемой каждым отдельным колесом, как указано в следующих параграфах.
Сцепление каждого колеса можно рассчитать, найдя долю веса груза, перенесенного на это колесо, а затем умножив на коэффициент сцепления с дорогой.
В единицах системы США — сила тяги, выраженная в фунтах в горизонтальном направлении, и всегда должна превышать расчетное тяговое усилие дышла, которое требуется для выполнения всех рабочих условий для поверхности дороги, уклона, ускорения и т. Д.В противном случае колеса начнут вращаться преждевременно до того, как будут выполнены технические требования.
Дифференциальный привод. Если два ведущих колеса работают от дифференциала, общее тяговое усилие будет рассчитано для колеса с наименьшей массой, умноженного на два.
Цельный мостовой привод. Если два колеса соединены неразрезной осью, тяга вычисляется отдельно для каждого колеса и суммируется, чтобы найти общее тяговое усилие.
Двойные колеса. Два колеса, расположенные рядом на одной оси, дают примерно такое же тяговое усилие, как одно колесо с одинаковым весом. Но поскольку два колеса могут нести вдвое больший вес, чем одно колесо, они будут обеспечивать вдвое большее тяговое усилие, если нести вдвое больший вес. Основное предназначение сдвоенных колес — не улучшить сцепление с дорогой, а выдерживать большую нагрузку.
Коэффициенты сцепления с дорогой
Коэффициенты сцепления с дорогой, приведенные в следующей таблице, такие же, как коэффициенты статического трения, обычно используемые в других инженерных расчетах.Они, конечно, приблизительны и применимы к твердым, сухим поверхностям. Для других типов колес и дорожных покрытий используйте коэффициент статического трения для этих материалов, опубликованный в технических справочниках. Колеса с проушинами — это особый случай, когда коэффициент сцепления мало зависит от сцепления колес с дорогой. Коэффициент для колес с проушинами может быть практически любым, в зависимости от конструкции проушин и проходимости дорожного покрытия.
| Резиновая шина на дороге с твердым покрытием | 0.От 6 до 0,8 |
| Сталь по стали (железнодорожный или шахтный двигатель) | от 0,1 до 0,3 |
| Гусеничный привод, гладкий, без проушин | 0,9 |
| Гусеничный привод, с проушинами, расчетный | 1,4 |
Максимальная тяга
Рисунок 3. Следует отметить, что максимальная тяга любого транспортного средства, независимо от количества приводимых колес, полностью зависит от веса транспортного средства.
Пример: Автомобиль массой 5000 фунтов, полностью загруженный и имеющий коэффициент сцепления с дорогой 0,8, никогда не сможет развить более 5000 × 0,8 = 4000 фунтов. тяговое усилие (тяговое усилие) независимо от количества приводимых колес и мощности двигателя. Единственный способ добиться большей тяги — увеличить его вес. Преимущество использования нескольких колес заключается в использовании веса транспортного средства и груза для увеличения тяги.
В рис. 3 , чтобы получить максимальное сцепление с дорогой, все колеса на транспортном средстве должны иметь привод, и все они должны быть механически связаны, чтобы не проскальзывало то, которое имеет наиболее легкую нагрузку.
Рисунок 3. Для обеспечения максимального тягового усилия все колеса железнодорожного или шахтного двигателя должны иметь привод.
Сопротивление качению
Рис. 4. Колеса из чугуна или стали, движущиеся по стальным рельсам, представляют собой особый случай сопротивления дорожного покрытия. Когда колеса катятся, они слегка вдавливают поверхность рельса и должны постоянно вылезать из этого углубления. Сила, называемая сопротивлением качению и выражаемая в фунтах, должна постоянно прилагаться по мере того, как колеса катятся.Величина этой силы зависит от контактирующих материалов, веса колес и радиуса колеса в дюймах.
Для железных или стальных колес на стальных рельсах сопротивление качению составляет около 0,03 фунта. на фунт веса автомобиля, и он обратно пропорционален радиусу колеса в дюймах.
Рис. 4. Сопротивление качению в значительной степени является результатом
вмятин в колесе и поверхности дороги.
Пример: Для автомобиля массой 10 000 фунтов с радиусом колеса 18 дюймов сопротивление качению = 10 000 × 0,03 ÷ 18 = 17 фунтов. Это только дополнительная горизонтальная сила, необходимая для подъема колес из углублений, и не включает нормальное сопротивление дороге и трогание с места, трение в подшипниках и другие потери.
* Методы оценки тягового усилия дышла для соответствия спецификациям дорожного покрытия, уклона, сопротивления ветру, ускорения и т. Д. Описаны в документе « Industrial Fluid Power — Volume 3 », опубликованном Womack Machine Supply Co .
© 1990, Womack Machine Supply Co. Эта компания не несет ответственности за ошибки в данных, а также за безопасную и / или удовлетворительную работу оборудования, разработанного на основе этой информации.
Колесные двигатели — GS Global Resources
Продукция> Гидравлика> Двигатели> Поршневые двигатели> Радиальный поршень> Колесные двигатели
Радиально-поршневые гидромоторы, предназначенные для привода колес транспортного средства.
- Решения с приводом на колеса для любого колесного оборудования, будь то сельское хозяйство. военный или строительный
- Большой рабочий объем кубических дюймов на оборот.
- Высокий выходной крутящий момент
- Устраняет необходимость в редукторах коробки передач
- Прямое соединение с колесом
- Отдельный двигатель для каждого колеса, приводимого в движение
GSGR предлагает широкий выбор двигателей от известных брендов, все с уникальными рабочими характеристиками, которые разработаны для превосходной и эффективной работы системы.Просмотрите ниже, чтобы найти широкий выбор на выбор. Не можете найти то, что вы ищете, команда разработчиков GSGR оказывает помощь по применению, чтобы определить правильный размер и стиль двигателя. Свяжитесь с нами сегодня, чтобы обсудить потребности вашего приложения.
MHP11 / MHP13 / MHP17 / MHP20 / MHP27 Серия двигателей
Универсальный высокопроизводительный двигатель с радиально-поршневым колесом, 55 куб.в до 214 куб. дюйм за оборот, 7250 фунтов на кв. дюйм. Конструкция двигателей серии MHP является результатом многолетних разработок и проверок. Он устанавливает новый стандарт в принципах кулачкового двигателя с точки зрения производительности, надежности и расхода топлива. Доступна серия MHP […]
- Мотор
MS / MSE серии
Универсальный гидравлический двигатель с радиально-поршневым колесом.Радиально-поршневые двигатели с кулачковыми кулачками MS / MSE с высоким крутящим моментом и прямым приводом отличаются высоким давлением, высоким КПД и очень низким уровнем шума. Двигатели доступны как колесные двигатели, колесные двигатели с тормозами, колесные двигатели с барабанными тормозами и валовые двигатели с шлицевыми валами с наружной резьбой и шлицевыми валами с внутренней резьбой. Компактность Оптимизированная стоимость Удельная мощность MS83 […]
- Мотор
Гидравлический привод на передние колеса (HFWD), который уменьшает повреждение газона | Технический обзор YANMAR | Технология | О YANMAR | YANMAR USA
Гидравлический привод передних колес (HFWD), который снижает повреждение газона
Аннотация
Полный привод обычно обеспечивает отличное тяговое усилие, однако имеет тенденцию к ухудшению характеристик поворота.Гидравлический привод на передние колеса (HFWD) может обеспечить плавный поворот на лужайке, так что автомобили с HFWD уменьшают повреждение газона.
1.Введение
Газонокосилки созданы для работы по лужайке, их шины всегда должны давить на траву во время движения.
Автомобили с приводом на два колеса не наносят так серьезного вреда газону, если не активируется резкое ускорение или торможение. С другой стороны, автомобили с полным приводом могут легко повредить газон простым поворотом.Даже если газонокосилки тщательно подстригают газон, нет никакого смысла в том, чтобы шины транспортных средств наступали на газон. Эта проблема заставляет Канзаки разработать новую гидравлическую систему переднего привода (HFWD) для полноприводных автомобилей, которая снижает повреждение газона.
Патент, полученный в процессе разработки, «Механизм привода оси для полноприводной газонокосилки» (патент № 4521627) был удостоен премии генерального директора Кансайского бюро экономики, торговли и промышленности региональные награды за изобретения Kinki за 2011 финансовый год.
Рис.1 Премия генерального директора Кансайского бюро экономики, торговли и промышленности на конкурсе Kinki Regional Invention Awards за 2011 финансовый год2.Технические характеристики токарной обработки
Полноприводные механизмы, обычно используемые в тракторах в качестве газонокосилок, у которых передние и задние колеса механически связаны приводным валом, соотношение скоростей между передними и задними колесами является фиксированным.
Это не является серьезной проблемой при движении по прямой, однако при повороте соотношение радиусов поворота между передними и задними колесами меняется в зависимости от угла поворота, поэтому автомобиль не может поворачивать плавно из-за фиксированного передаточного отношения между передними колесами. и задние колеса.
Рис.2 Траектория поворота для типичного полноприводного трактораКак показано на рис. 2, шины тянутся по лужайке из-за разницы между передаточным числом радиуса поворота и передаточным числом колес, что приводит к повреждению газона. Чтобы добиться плавного поворота при сохранении ходовых качеств, необходимо изменять передаточное отношение одного из задних или передних колес в соответствии с углом поворота.
Рис.3 Использование двигателя с регулируемой скоростью для изменения скорости передних колесРис.3 показана гидравлическая система полного привода, в которой используется гидравлика для обеспечения последовательного соединения через гидравлическую систему трубопроводов между задней трансмиссией, которая включает в себя гидравлический насос и гидравлический двигатель, и передней осью, в которой два гидравлических двигателя размещены параллельно.
Рис. 4 Гидравлический привод на передние колеса (HFWD), который работает путем изменения регулируемого угла наклонной шайбы гидравлического двигателяв соответствии с углом поворота рулевого колеса
Как показано на рис. 4, передняя ось гидравлической системы полного привода (HFWD) работает путем изменения угла наклонной шайбы для регулируемого гидравлического двигателя в соответствии с углом поворота рулевого колеса, тем самым позволяя поддерживать соответствующее передаточное отношение между передние и задние колеса в соответствии с радиусом поворота.
Рис.5 Плавный поворот с гидравлическим приводом на передние колеса (HFWD)В результате автомобили с HFWD могут разворачиваться более плавно и иметь меньший радиус поворота, чем у обычных автомобилей, как показано на рис. 5.
3. Советы по регулировке соотношения скоростей между передними и задними колесами
Обратите внимание, что движение по прямой, установка скорости передних колес выше, чем у задних, вызывает чрезмерное потребление энергии из-за циркуляции мощности между задними и передними колесами по земле (задние и передние колеса работают напротив друг друга).
Рис.6 Взаимосвязь между соотношением скоростей передних и задних колес и давлением гидравлического приводаКак показано кривыми давления на рис. 6, установка скорости переднего колеса выше, чем скорость заднего колеса, вызывает изменение порядка, поскольку позиция B находится на верхней стороне A.
Обычно транспортные средства должны перемещаться под давлением, обозначенным кривой давления на рис. Слева. С другой стороны, форма кривой давления на рис. Справа показывает, что избыточное давление создается в соответствии с ненужной работой, устанавливая более высокую скорость передних колес. чем у тыла.
Чем выше скорость переднего колеса по сравнению со скоростью заднего, тем выше давление, возникающее во время движения. В то время как установка одинаковой скорости для задних и передних колес с одинаковой скоростью приводит к одинаковому давлению в точках измерения A и B, как показано кривой давления в центре на рис.
До этого момента циркуляции энергии не происходит. То есть, когда давление в обоих положениях измерения A и B становится равным давлению в положении измерения A на кривой слева на рис.Дело в том, что в тех гидравлических полноприводных системах, в которых задняя трансмиссия и передняя ось соединены последовательно, скорость передних колес должна быть такой же или более медленной, чем скорость задней.
В то время как HFWD может устанавливать скорость передних колес в соответствии с требованиями, регулируя угол наклонной шайбы в регулируемом гидравлическом двигателе, слишком большое уменьшение скорости передних колес создает отрицательное давление в позиции измерения B, поэтому диапазон регулировки должен быть находится в приемлемом диапазоне.
Рис.7 Добавление обратного клапанаОднако эффективный радиус шины изменяется в зависимости от различных факторов, таких как давление в шинах или распределение веса рабочего оборудования, соотношение скоростей между передним и задним колесом, вероятно, будет изменяться. Как следствие, доступный диапазон настройки передаточного числа колес значительно ограничен, поэтому требуется точная регулировка для каждого автомобиля по отдельности. Как показано на Фиг.7. в гидравлический контур, соединяющий заднюю трансмиссию и переднюю ось, вставлен обратный клапан, который гарантирует отсутствие отрицательного давления, даже если скорость передних колес установлена относительно низкой.Соответственно, это позволяет расширить доступный диапазон настройки передаточного числа, а также повысить производительность.
Таким образом, была разработана гидравлическая система переднего привода (HFWD) для полноприводных автомобилей, которая снижает повреждение газона.
4. преимущества отсутствия приводного вала
Рис.8 Разница в системах полного приводаКак показано на рис. 8 слева, одна из проблем полноприводной системы с карданным валом состоит в том, что пространство, доступное для подъема косилки, ограничено.Отсутствие достаточного пространства для подъема косилки увеличивает риск столкновения косилки с препятствиями при движении без операции кошения.
Принимая во внимание, что, как показано на правом Рис. 8. Гидравлический привод на четыре колеса может устранить приводной вал и обеспечить гибкость при размещении гидравлических трубопроводов, вместо этого он обеспечивает такую же высоту косилки, как это возможно с приводом на два колеса. газонокосилки. Это также облегчает производителям транспортных средств преобразование существующих полноприводных автомобилей в полноприводные.
5. Выводы
Передний мостHFWD для гидравлических систем полного привода с рулевым управлением Ackermann с превосходными ходовыми качествами приветствуется как очень привлекательное предложение в Европе, где обычна холмистая местность и растет спрос на полный привод. На какой-то европейской выставке сельскохозяйственной техники гостям предлагалось прокатиться на полноприводном гидравлическом приводе с системой HFWD в условиях тест-драйва по грязному крутому бездорожью.
Мы продолжим работать над тем, чтобы в будущем разрабатывать продукты, очень привлекательные для клиентов.
-ВАЖНО-
Оригинальный технический отчет написан на японском языке.
Этот документ переведен Отделом управления исследованиями и разработками.
Гидравлические приводные двигатели и горнодобывающая промышленность
Есть много-много разных машин, которые используются для майнинга. Большинство машин, от небольших погрузчиков до гигантских карьерных самосвалов, используют гидравлические двигатели . В центре внимания этого сообщения в блоге — использование гидравлических двигателей в горнодобывающей промышленности с обзором некоторых из классификаций для горнодобывающего оборудования.
Блог Shop Talk продолжает предоставлять стратегические информационные и образовательные статьи, чтобы вы могли опередить по тяжелому оборудованию для вашей отрасли. Вот другие ключевые сообщения о гидравлических двигателях, чтобы держать вас в курсе:
карьерные самосвалы
Шахтные самосвалы , также известные как карьерные самосвалы или карьерные самосвалы, представляют собой тяжелых, массивных самосвалов , которые перевозят материалы и предназначены исключительно для внедорожного использования.В то время как некоторые из этих грузовиков используют электрический привод на колеса, другие используют двигатели с гидравлическим приводом со встроенной коробкой передач или то, что часто называют двигателем главной передачи .
Горные экскаваторы
Горное дело Экскаваторы — это большие мощные гидравлические экскаваторы, используемые для загрузки карьерных самосвалов, в состав которых входят передние лопаты . В то время как передние лопаты имеют ковш, который копает вперед и от машины, у экскаваторов есть ковши, которые копают назад и по направлению к машинам.И экскаваторы, и экскаваторы — это гусеничные машины , требующие гидравлических гусеничных приводов.
Колесные погрузчики
Также известные как ковшовые погрузчики или фронтальные погрузчики, колесные погрузчики часто можно найти на горнодобывающих предприятиях и используются, как следует из названия, для загрузки материалов или их перемещения. Типичный колесный погрузчик использует гидравлические приводные двигатели для приведения в действие колес, хотя в будущем мы можем увидеть электродвигатели привода.
Колесный экскаватор
Это одни из самых больших машин в мире, которые представляют собой впечатляющее достижение инженерной мысли. Роторные экскаваторы в основном используются в карьерах и используют интересную систему ковшей (отсюда и название), желобов и конвейерных лент. Эти очень большие машины имеют гусеничный привод и используют гидравлический гусеничный привод или главную передачу.
Бурение взрывных скважин
Задача буровзрывного устройства — пробурить скважину, в которую помещается электрический заряд. Большинство, если не все, буровые установки для взрывных скважин представляют собой гусеничные машины. Они используют гидравлические приводные двигатели гусеницы с высоким выходным крутящим моментом для движения гусениц и, таким образом, перемещения машин.
Майнеры непрерывного действия
Другим типом горнодобывающего оборудования, в котором используются гидравлические двигатели, могут быть комбайны непрерывного действия , на которые приходится около 45% добычи угольных шахт подземным способом. Гидравлические двигатели используются для привода гусениц. Эти приводные двигатели гусеницы обычно имеют коробку передач с очень большим передаточным числом для достижения максимального крутящего момента.
Гусеничные тракторы
Многие люди узнают гусеничный трактор , когда его называют бульдозером или бульдозером.Эти машины имеют отвал, прикрепленный к передней части (если это навесное оборудование для погрузчика, его называют гусеничным погрузчиком). Поскольку они являются гусеничными машинами, у них есть приводные двигатели с редукторами для создания огромного крутящего момента.
Прочее оборудование
Другие распространенные объекты в горнодобывающей промышленности включают гусеничный кран (гусеничный кран, отсюда и его название) и гусеничный погрузчик — оба требуют гидравлических приводных двигателей.Некоторые анкерные болты имеют гусеничный ход и также используют гусеничные приводы. Компакторы , автогрейдеры и скребки также могут использоваться в горнодобывающей промышленности и обычно имеют двигатели с гидравлическим приводом.
Гидравлические двигатели Eaton и горнодобывающая промышленность
Когда речь идет о бортовых передачах и гидравлических двигателях для горнодобывающей промышленности, одной из ключевых характеристик является эффективность, как механическая, так и объемная. Также ключевыми факторами для многих приложений в горнодобывающей промышленности являются высокий пусковой крутящий момент, высокая плотность крутящего момента и высокая удельная мощность.Гидравлические двигатели Eaton JMV серии для гусеничных приводов в горнодобывающей промышленности являются отличным выбором благодаря своей эффективности, высокому пусковому крутящему моменту, долговечности и совместимости с большинством установок.
Узнайте больше о современной механической технологии y с гидравлическими приводными двигателями Eaton.
Поставщики двигателей с гидравлическим приводом
Двигатели с гидравлическим приводом — Von Ruden Manufacturing, Inc.Гидравлические приводные двигатели и системы, в состав которых они входят, широко используются в самолетах, транспортных средствах, промышленных подъемных механизмах и в машинах, требующих сильного воздействия давления. Гидравлические двигатели при использовании в подходящей системе способны выполнять большие объемы работы за короткие периоды времени. Кроме того, гидравлические двигатели часто используются в автоматизированных производственных системах, траншеекопателях, автомобилях, строительном оборудовании, приводах для морских лебедок, процессах утилизации и переработки отходов, колесных двигателях для военной техники, самоходных кранах, экскаваторах, лесном хозяйстве, сельском хозяйстве, конвейерах и шнеках. системы, дноуглубительные работы и промышленная обработка.
Гидравлические приводные двигатели — Von Ruden Manufacturing, Inc.Есть три основных типа гидравлических приводных двигателей: шестеренчатые, лопастные и поршневые. Каждый из них использует свой метод выработки энергии, при этом полагаясь на гидравлическую жидкость. Двигатели с гидравлическим приводом являются механическими приводами, потому что они представляют собой компоненты, которые контактируют с жидкостью и выполняют работу по выработке энергии.
Двигатель приводится в движение небольшим пневматическим двигателем, который перекачивает масло из резервуара через впускной клапан к выпускному клапану через ряд шестерен, вращающихся винтов, поворотных лопастей или цилиндров, в зависимости от конкретного типа гидравлического двигателя.Жидкость заставляет вращающиеся компоненты быстро вращаться, что генерирует механическую энергию, потому что двигатель соединен с другим оборудованием, например, через приводной вал.
После прохождения через двигатель гидравлическая жидкость фильтруется и возвращается в основной бак в открытой системе или продолжает движение в одном контуре под давлением в закрытой системе. Для управления высоким давлением в системе требуются сверхмощные клапаны; это давление способно преобразовать всего 4,5 фунта входной силы в 100 фунтов силы перемещения груза, и эта способность доступна только для базового ножного насоса.Другие гидравлические двигатели могут обеспечивать силу в миллионы метрических тонн с помощью этой простой системы.
Drysdale Dryvtech Гидравлический 2-х колесный мотоцикл с 2-мя управляемыми колесами и 2-х колесный привод
Гидравлический 2-х колесный мотоцикл Drysdale Drivtech 2x2x2 с 2-х колесным управлением и 2-х колесным приводом от Яна ДрисдейлаВот ранняя сборка (1990 г.) от главного строителя. Ян Дрисдейл придумал этот интересный мотоцикл, использующий гидравлический привод на оба колеса и, на всякий случай, гидравлическое рулевое управление на обоих колесах.Оснащенный двухтактным двигателем, Ян назвал его Drysdale Dryvtech 2x2x2.
Ян объясняет систему привода:
Мотоцикл Drysdale Drivtech 2x2x2 с гидравлическим управлением на 2 колеса и приводом на 2 колеса от Ian DrysdaleНасос нагнетает масло под давлением примерно до 4500 фунтов на квадратный дюйм, которое затем направляется в гидравлические двигатели, расположенные в каждой ступице колеса, которые преобразуют энергию масла под высоким давлением во вращательное движение. Замораживая время на мгновение, вы можете визуализировать, как один поршень в насосе напрямую прикладывает силу к поршню в колесном двигателе через длинный столб масла. Масло практически несжимаемо, поэтому на долю секунды вы можете представить масло в виде твердой стальной балки, заставляющей поршень насоса давить на поршень двигателя.Скорость велосипеда определяется бесступенчатой производительностью насоса.
Что касается рулевого управления, то здесь нет прямой механической связи с колесами:
Вращение руля приводит в действие главный гидравлический цилиндр, который нагнетает масло (отдельно от масла системы привода) и направляет его по негибким шлангам к гидроцилиндру (рабочему цилиндру), установленному рядом со ступицей, которая перемещает колесо.Оба колеса управляются, но не вместе и не с линейной скоростью, в то время как аккумулятор (фактически «гидравлическая батарея») поддерживает давление в системе рулевого управления.
Здесь есть на что посмотреть и понять, и это было ранним признаком того, что Ян собирался создавать что-то необычное. Читая его подробное описание мотоцикла, кажется, что у него есть несколько причуд. Например, когда двигатель не работает, колеса не вращаются на выбеге, они заблокированы на месте, что может быть немного неудобно.Также существует система торможения, при которой в качестве тормозов используются гидравлические двигатели, что не работает должным образом и приводит к срыву уплотнений.
В целом, однако, это настоящий шведский стол механического волшебства в действии. Очень подробное описание и объяснение того, как все работает, лучше всего искать на веб-сайте Яна.
Мотоцикл был продан и отправился в автомобильный музей Доннингтона в Великобритании. Нынешний владелец купил его несколько лет назад и привез обратно в Австралию, где сейчас продается.Это может быть хорошей возможностью для одного из наших многочисленных австралийских читателей.
Ссылка: Drysdale Dryvtech 2x2x2 на eBay
Ссылка: веб-страницы Яна Dryvtech
для минимизации повреждения газона
Газонокосилка может повредить вашу траву, пока вы по ней катаетесь. Проблема вызвана неэффективностью системы 2WD, особенно при поворотах. Это побудило нас разработать полноприводный автомобиль с гидравлическим приводом на передние колеса (серия KXH), который защитит ваш газон от повреждений.
Премия Генерального директора Промышленного бюро (2011, Япония)Особенности токарной обработки
Влияние передаточного числа на переднюю и заднюю оси
Если бы система была спроектирована так, что «передняя скорость> задняя скорость», транспортное средство будет терять значительное количество энергии из-за циркуляции мощности.
Форма волны давления (6-3) показывает, что настройка «скорость переднего хода> скорость заднего хода» вызывает явление реверсирования (давление B> A).
Кривая давления (6-1) показывает диапазон, в котором автомобиль может безопасно двигаться.
Если для автомобиля установлено значение «Передняя скорость = задняя скорость», давление также уравновешивается (давление B = A) (6-2).
Это предел без циркуляции энергии.
В заключение, оптимальная настройка в системе 4WD: «Передняя скорость =
Что касается настройки гидравлического привода передних колес, скорость может быть изменена путем регулировки угла наклона шайбы. Но слишком большое снижение скорости вызывает отрицательное давление.
Соотношение скоростей между передней и задней осями легко меняется, поскольку равновесие радиуса может быть обеспечено неравномерным давлением в шинах, навесным оборудованием и т. Д.Чтобы автомобиль был ровным, необходимо точно отрегулировать каждый автомобиль.
Для улучшения разрежения обратный клапан расположен в цепи между передней осью и задней трансмиссией (7). В результате зона регулировки стала больше, чем раньше, и повысилась производительность.
Почему мы используем систему «без приводного вала»
С приводным валом режущая дека на небольшом транспортном средстве должна располагаться в низком положении. Поскольку режущая дека находится низко к земле, повышается вероятность непреднамеренного удара во время движения транспортного средства.Система Hydraulic 4WD решает эту проблему, поскольку ей не нужен приводной вал. Расположение гидравлической трубы обеспечивает гораздо больший зазор, как у автомобиля с полным приводом. У наших клиентов также есть возможность добавить эту систему к своему автомобилю с полным приводом, чтобы создать автомобиль с полным приводом.
Постскриптум
В Европе высок спрос на надежный трактор, способный работать в холмистой местности. Наш автомобиль с жесткой рамой уже получил хорошие отзывы на этом рынке и обладает отличными ходовыми качествами.Мы постоянно стремимся разрабатывать продукты, которые нравятся нашим клиентам, чтобы сделать их жизнь более комфортной и эффективной.