Гидромеханический привод — Большая Энциклопедия Нефти и Газа, статья, страница 1
Cтраница 1
| Схема гидротрансформатора ТРК-325. [1] |
Гидромеханический привод применяют на одномоторных кранах с двигателями внутреннего сгорания для улучшения характеристик привода. Между двигателем и трансмиссией крана вместо главной муфты фрикционного типа устанавливают специальное гидравлическое устройство — гидротрансформатор. [2]
| Гидромеханический привод с кулачковым валом. [3] |
Гидромеханические приводы представляют собой сочетание гидропривода с механическими звеньями. На рис. 5.37 показан гидромеханический привод для управления в функции пути, где в качестве механического звена использован периодически вращающийся в опорах вал с кулачками и храповым колесом. Поворот храпового колеса 6 на заданный угол происходит при получении сигнала путевого датчика. Кулачки действуют на плунжеры золотников 1 и 2, заставляя их занимать определенное, заранее установленное положение при каждом из положений управляющего вала.
[4]
Поворот храпового колеса 6 на заданный угол происходит при получении сигнала путевого датчика. Кулачки действуют на плунжеры золотников 1 и 2, заставляя их занимать определенное, заранее установленное положение при каждом из положений управляющего вала.
[4]
| Схема процесса раскатки заготовок зубчатых колес. [5] |
Гидромеханический привод модуля воздействует на сферодвижный механизм, обеспечивая различные траектории движения верхней части штампа, в то время как нижняя часть неподвижно закреплена на столе. В соответствии с выбранной траекторией движения верхней матрицы осуществляется деформирование материала заготовки в контактной зоне. Усилие деформирования в этом процессе в несколько раз меньше, чем при объемной штамповке, однако время обработки возрастает. [6]
Гидравлический и гидромеханический привод может быть индивидуальным или групповым.
Гидромеханический привод плунжера впрыска обладает рядом недостатков, присущих механическому приводу, и поэтому получил ограниченное распространение в машинах, выпускаемых в СССР и за рубежом. В машинах, выпускавшихся фирмой Баттенфельд, такой привод применялся для машин с объемом впрыска до 3000 см3 ( фиг. В последних моделях этой фирмы на впрыске используется уже гидравлический привод. [8]
Применяют также пневмогидравличеекие и гидромеханические приводы. [9]
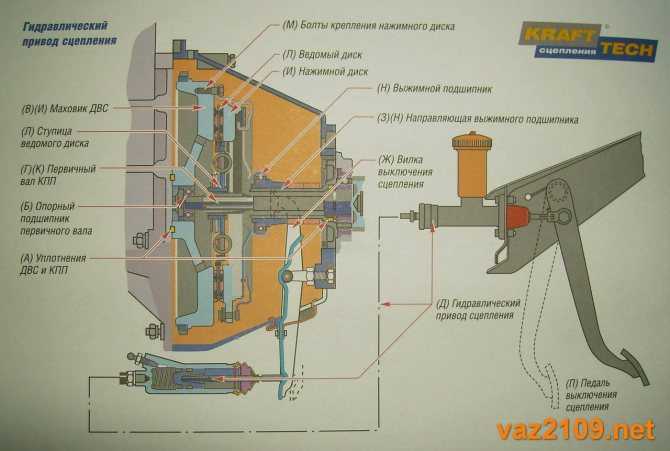
При использовании гидромеханического привода е педалью, смонтированной на переднем щитке автомобиля ( рис. V.10), достигается герметичность дна кузова и проще решается передача усилия от педали к двигателю, установленному на упругих подушках. Доступ к приводу сцепления облегчается. [10]
Усилие зажима гидромеханическим приводом обеспечивается настройкой контрольно-регулирующей гидроаппаратуры, электромеханическим ключом — по реле максимального тока.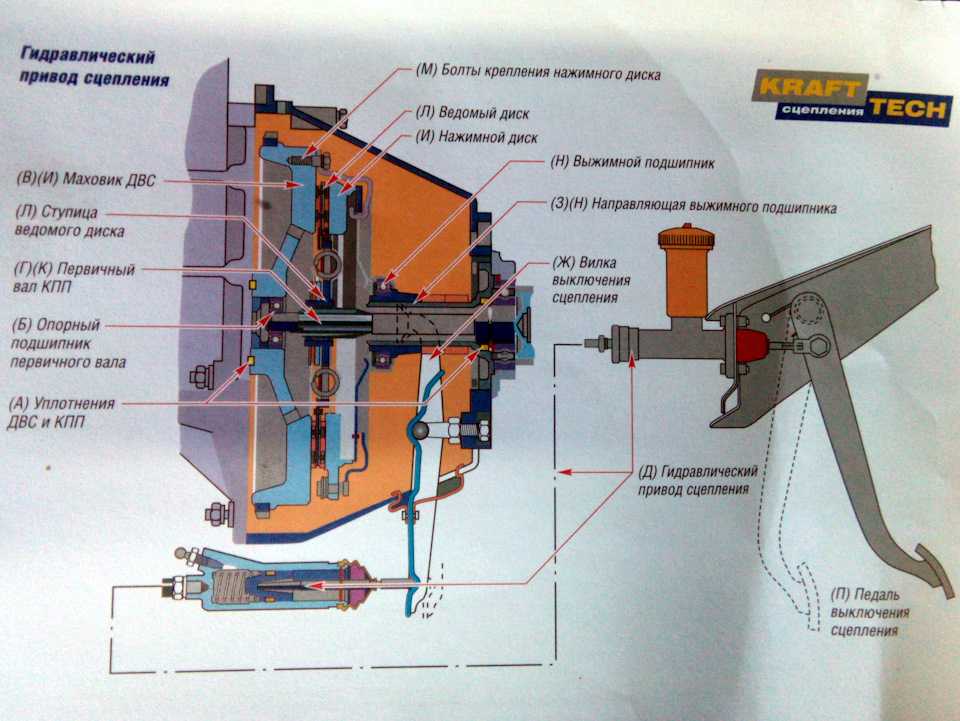
| Общий вид долбежного станка мод. 7430. [12] |
Подача стола осуществляется гидромеханическим приводом. [13]
Конические роторы могут иметь гидромеханический привод, расположенный с одной стороны ротора. [14]
На рис. 5.38 дан гидромеханический привод с механическим звеном — валиком со шпоночными пазами. [15]
Страницы: 1 2 3 4
Гидромеханический привод (передача)
утечек (b) и сжимаемости (а) жидкости зависят от величины ее дав ления.
ГИ ДРОПРИ ВОДЫ ПОСТОЯННОЙ СКОРОСТИ
Рассмотренный привод может быть также применен и в тех слу чаях, когда необходимо обеспечить постоянное число оборотов на его выходном валу при переменном числе оборотов на валу насоса. К по добным случаям относят приведение во вращение генераторов перемен ного тока самолетов, числа оборотов двигателей которых могут изме няться в широком диапазоне, примерно 4:1, в зависимости от условий
полета | самолета. |
|
|
|
| ||||
| Принципиальная схема гидравлического привода стабильных обо | ||||||||
ротов | с центробежным регулято |
|
| ||||||
ром |
| скорости | приведена на |
|
| ||||
рис. | 132. |
| состоит | из | насоса, |
|
| ||
| Привод |
|
| ||||||
устанавливаемого | на | фланце |
|
| |||||
авиационного двигателя, и гидро |
|
| |||||||
мотора, | вал | которого | соединен |
|
| ||||
с приводимым | электрогенерато |
|
| ||||||
ром. | При | изменении | (рассогласо |
|
| ||||
|
|
| |||||||
вании) | выходной скорости гидро |
|
| ||||||
мотора связанный с ним центро | Рис. 132. | Принципиальная схема гидравли | |||||||
бежный регулятор 1 воздействует | |||||||||
на | плунжер | распределительного | ческого | привода с центробежным регуля | |||||
| тором скорости | ||||||||
золотника 2, | который, | подавая |
|
| |||||
жидкость в ту или иную полость цилиндра 3 механизма регулирования производительности (угла наклона шайбы 4) насоса, восстанавливает рассогласование, поддерживая тем самым выходную скорость гидромо тора постоянной.
В более сложных схемах, в которых требуется синхронизировать параллельную работу нескольких электрогенераторов на сеть с возмож ными колебаниями чисел оборотов авиадвигателей, а также колебания ми нагрузки и других параметров, применяют электрогидравлические регуляторы, в которых распределительный золотник узла регулирования производительности насоса приводится в действие с помощью соленоида, реагирующего на изменение силы тока, возникающее вследствие изме нения скорости выходного вала гидромотора.
Как известно, к. п.д. гидропривода, состоящего из регулируемого насоса и нерегулируемого мотора, имеет максимальное значение лишь при определенном режиме работы (определенном расходе жидкости), при отклонении от которого к. п. д. уменьшается. Следовательно, целесо образной будет такая схема гидропривода, в которой передача мощ ности генератору происходила бы в основном по каналу механической передачи, а меньшая — по каналу гидропривода, который в этой схеме лишь добавляет или отнимает разницу в скоростях (числах оборотов) выхода, обусловленную колебаниями скорости входа (авиадвигателя).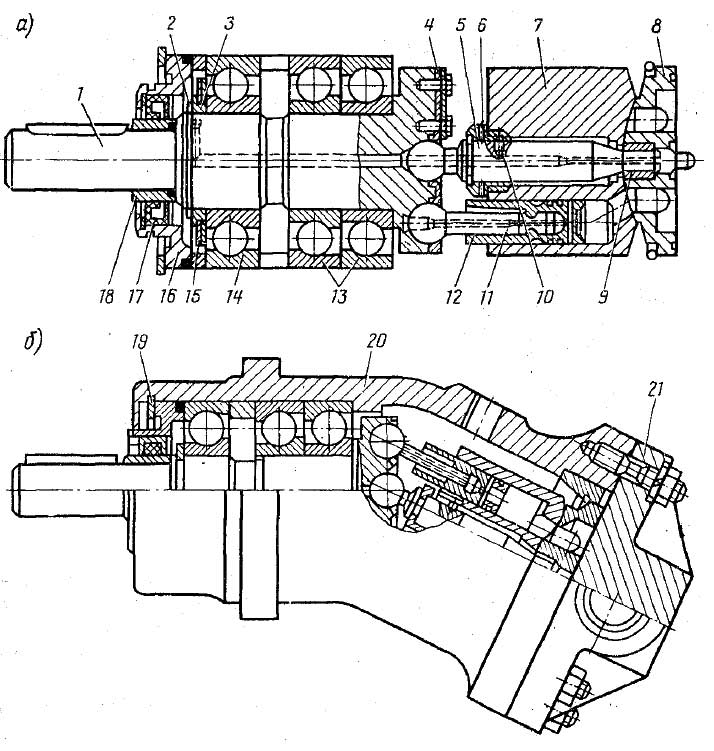
Одна из распространенных схем привода подобного типа с плане тарным механизмом и регулируемым реверсивным насосом приведена на рис. 133. Гидропривод предназначен для подачи дифференциальной скорости, когда число оборотов приводного вала насоса выше или ниже заданного (требуемого) среднего числа его оборотов. В этом случае гидромотор, питаемый от насоса, находящегося на входном валу а пла нетарного механизма b, вращаясь в ту или иную сторону, ускоряет или
201
замедляет число оборотов выходного вала с планетарного механизма. Производительность насоса, а следовательно, и число оборотов гидро мотора, сообщающего дополнительную скорость выходному валу с планетарного механизма, регулируют центробежным или электрогидравлическим устройством.
На рис. 134 представлена передача с двумя дифференциалами (планетарными механизмами), преимуществом которой является то, что
Рис. | 133. Гидромеханический привод | Рис. |
с | регулятором стабильной скорости |
|
 134. Гидромеханический привод
134. Гидромеханический приводона позволяет осуществить более рациональное распределение мощно сти между механической и гидравлической частями передачи. В такой схеме привода можно создать для насоса и гидромотора режимы ра боты, близкие к оптимальным, а следовательно, получить максимальный
к.п. д. привода, величина которого может быть доведена до 0,85. Гидромеханической передаче присуще большинство качеств объем
ного гидропривода: она обладает бесступенчатым регулированием, легко поддается автоматизации и пр. Однако гидромеханическая передача лишена такого преимущества объемного гидропривода, как независи мость расположения узлов, имеет пониженный диапазон регулирования и более сложную конструкцию.
Дифференцирование в передаче мощности можно также осущест вить гидравлическим способом, не применяя планетарных или диффе ренциальных механизмов. Схема подобного привода представлена на рис.
Насос 2 (регулируемая часть) и мотор 1 (нерегулируемая часть) либо вращаются как одно целое, либо мотор вращается с меньшей или большей скоростью, чем насос. При нулевом угле наклона шайбы 3 насоса 2 (нейтральное положение) гидромотор жестко связан с насо сом через жидкость, запертую в цилиндрах насоса, причем «проскаль зывание» валов насоса 4 и мотора 5 определится объемными утечками жидкости, запертой в их цилиндрах.
При наклоне шайбы насоса в какую-либо сторону гидромотор будет получать, помимо основного движения вместе с насосом, еще и относи тельное движение, которое в зависимости от направления подачи на соса будет ускоряющим, либо замедляющим основную скорость вала 5. В первом случае насос подает жидкость в рабочую полость гидромо тора, благодаря чему последний будет получать, помимо основного дви жения вместе с насосом, еще и относительное движение за счет подачи насосом жидкости в гидромотор. Во втором случае рабочая полость гидромотора соединяется с нерабочей (всасывающей) полостью насоса,
2 0 2
поэтому часть жидкости из рабочей полости гидромотора будет заби раться насосом, т. е. гидромотор в этом случае начнет работать в каче стве насоса. Вследствие этого вал гидромотора будет «проскальзывать» относительно вала насоса, который в данном случае действует как гид ромотор, возвращая двигателю часть забираемой от него мощности, в результате число оборотов вала гидромотора уменьшится. Величина и направление указанного дополнительного движения гидромотора за висит от величин положительного или отрицательного угла наклона дис ка насоса.
е. гидромотор в этом случае начнет работать в каче стве насоса. Вследствие этого вал гидромотора будет «проскальзывать» относительно вала насоса, который в данном случае действует как гид ромотор, возвращая двигателю часть забираемой от него мощности, в результате число оборотов вала гидромотора уменьшится. Величина и направление указанного дополнительного движения гидромотора за висит от величин положительного или отрицательного угла наклона дис ка насоса.
Гидравлическая схема подобного привода самолетного электроге нератора приведена на рис. 136. Цилиндровый блок 2 насоса приводится в действие от авиадвигателя через шестерни 1 и 7 с числом оборотов, пропорциональным числу оборотов приводного (входного) вала 6. Про изводительность насоса зависит от изменения угла наклона шайбы 4, которое осуществляется гид
роусилителем | 3. | Датчиком | |||
служит золотник | с электро | ||||
магнитным | приводом 5, ко | ||||
торый, реагируя | на | измене | |||
ние | числа | оборотов | насоса, | ||
воздействует на гидроусили | |||||
тель | 3. | ||||
трогидр авлического | регуля | ||||
тора | приводится | в действие | |||
от червячной | шестерни 5. | ||||
| Насос | 9 | обеспечивает | ||
смазку и насос 10 служит | |||||
для | подкачки | и | питания Рис. 135. Схема гидродифференциального привода | ||
механизма |
| регулирования | |||
 Тахогенератор элек
Тахогенератор элекрасхода основного насоса. В силовой линии передачи установлен пере ливной клапан 7 (давление 17 кГ/см2), благодаря которому в ней под держивается давление, необходимое для регулирования производитель ности насосной части и перемещения ее поршней.
Число оборотов выходного вала 9, связанного с приводимым элек трогенератором, равно 6000 об/мин; число оборотов входного вала 6,
связанного с | авиационным | двигателем, | переменное — от | 2400 до |
9000 об/мин. |
|
|
|
|
Преимуществом рассмотренной гидродифференциальной | передачи | |||
является также | возможность | применения высоких чисел оборотов (до | ||
18 000 об/мин), | что позволяет | значительно | уменьшить вес и габариты | |
агрегата. Для этого насосную часть снабжают шестеренной парой, по вышающей число оборотов до 18 000 об/мин. На выходном валу приме нена шестеренная передача, понижающая число оборотов до требуемого значения.
Опыт показал, что дифференциальная гидропередача с центробеж ным регулятором и жесткой обратной связью обеспечивает стабильность оборотов в пределах±5%.
Для повышения точности регулирования до 1%, требующейся для параллельной работы двух генераторов на общую сеть, применяют элек трический корректор. Практически в схеме с подобным корректором до стигается точность±0,25%.
Применение высоких чисел оборотов в сочетании с относительно высокими давлениями жидкости (300 кГ/см2) обеспечили малый вес передачи. В частности, привод мощностью 60 л. с., который имеет на выходном валу 6000 об/мин, при числах оборотов приводного вала авиа ционного двигателя в пределах от 1000 до 3000 об/мин и при работе на
203
давлении 300 кГ/см2, весит 22 кг, что составляет 0,37 кг на 1 л. с. Минн» мальное значение к. п. д. этой передачи равно 0,75 и максимальное зна чение 0,85.
На рис. 137, а показана схема гидропривода иной, чем на рис. 136, конструкции. Поршневой блок 2 насоса 7 связан с входным валом /, блок 3 гидромотора — с выходным валом 6. Величины ходов поршней насоса и гидромотора, т. е. их рабочие объемы, определяются величи нами эксцентриситета их блоков по отношению к осям направляющих колец 3 и 4.
Величины ходов поршней насоса и гидромотора, т. е. их рабочие объемы, определяются величи нами эксцентриситета их блоков по отношению к осям направляющих колец 3 и 4.
Рис. 136. Схема гидравлической трансмиссии гидродифференциального типа
Величина эксцентриситета насоса не регулируется и определяете» положением кольца 3, являющегося продолжением цилиндрового блока гидромотора, относительно оси цилиндрового блока насоса. Величину эксцентриситета гидромотора можно изменять путем радиального сме щения кольца 4 с помощью какого-либо регулятора, воздействующего на толкатели 5. При нулевом эксцентриситете гидромотора входной и выходной валы будут только связаны жидкостью, заключенной в ци линдрах насоса, и весь узел будет вращаться как одно целое. Подобное положение кольца 4 будет соответствовать редукции передачи 1:1. При наличии же эксцентриситета выходной вал гидромотора будет получать через жидкость замедление или ускорение в зависимости от знака эксцентриситета: при эксцентриситете того же знака, что и эксцентри ситет насоса, скорость выходного вала будет больше скорости входного вала и наоборот.
Подобные приводы применяют с регулированием гидромотора и на соса, которое осуществляется перемещением общего направляющего кольца. На рис. 137, б схематически показаны различные положения на правляющего кольца, которые соответствуют: остановке гидромотора
204
(положение /), редукции 2:1 (положение II) и редукции 1:1 (поло жение III).
Описанный привод применяют для стабильных оборотов выходного вала 6000 об/мин при изменениях чисел оборотов входного вала от 2500 до 8500 об/мин. Мощность существующих трансмиссий этого типа «коло 100 л. с.
ГЛАВА X
СИЛОВЫЕ ЦИЛИНДРЫ
Силовой цилиндр (гидроцилиндр) является объемным гидродвига телем с прямолинейным или поворотным возвратно-поступательным движением рабочего органа (поршня или плунжера) относительно кор пуса цилиндра.
На рис. 138 приведены схемы цилиндров прямолинейного движения двух основных типов: двухстороннего (а и б) и одностороннего (в) дей ствия; поршень (скалка) последнего цилиндра совершает обратный ход под действием пружины или внешних сил.
:ttt’
3
/
4
M;45
YA
i
l
y//.'<
6)
Рис. 138. Схемы силовых ци
линдров
в)
Движущее усилие Р на штоке цилиндра и скорость v его перемеще ния без учета потерь на трение, противодавления и утечек жидкости определяют по формулам
P — P f и т’ = у , | (258) |
где Q — расход жидкости.
/— рабочая площадь поршня:
,я£>2
/= ——- для цилиндра, представленного на рис. 138, а, при
4 подаче жидкости в полость, противоположную штоку;
206
, Я (£>2 — Й(2)
/ — ——— для цилиндра, представленного на рис. ;
;
D и at—диаметры поршня и штока (рис. 138. а и б).
Для цилиндра одностороннего действия (рис. 138, в) рабочей площадью является площадь сечения штока (скалки) /== — . Эти цилинд
ры просты в изготовлении, поскольку обработке подлежат лишь поверх ность d буксы под шток (скалку) и отпадает необходимость в обра ботке зеркала внутренней поверхности цилиндра.
Когда требуется развить большое усилие при рабочем ходе и высо кую скорость обратного хода, применяют цилиндры с тонким штоком, работающим при рабочем ходе на растяжение и обратном — на сжатие. Схема включения такого цилиндра в гидросистему представлена на
От насоса
г-
УХ. У//////////Л х/\
1 ,
—
—
/////////////////У Л
а) | 5,) |
Рис. 139. Схемы | включения силовых цилиндров |
| в гидросистему |
рис. 139, а. Для обеспечения движения поршня в правую сторону и обе
Для обеспечения движения поршня в правую сторону и обе
полости цилиндра закорачивают и соединяют | с насосом; | в резуль |
тате жидкость, вытесняемая из правой полости | цилиндра, | поступает |
в левую полость вместе с жидкостью, подаваемой насосом. При этом движущее усилие Pi и скорость V\ движения поршня вправо определяет ся из выражений:
Рх= — dtp; | nd2 | (259) |
1 d | v |
Для перемещения поршня влево жидкость подается лишь в правую полость цилиндра, а левая полость соединяется с баком. Движущее усилие и скорость перемещения поршня в этом случае определятся из выражений:
р | = J L (£ )2 _ rf2)/7. | „(£>2 _ d2) |
| V | |
 > 2
> 2Цилиндр, конструкция которого приведена на рис. 139,6, обеспечи вая высокую жесткость штока, позволяет осуществить при условии
d > D /Y 2 большие скорости обратного хода и большие усилия прямого рабочего хода. Цилиндр включают в гидросистему так, что в правую его полость жидкость подается постоянно, в левую — при движении поршня вправо. При соединении левой полости с баком поршень под действием постоянно действующих сил давления жидкости в правой по лости будет перемещаться влево.
Из рис. 139, б видно, что при d —D/ ]/2~ площадь штока будет в два раза меньше площади цилиндра; рабочие площади при движении пор шня в обе стороны в этом случае будут равны и определяться из выра жения
х_лг/2
2 0 7
В соответствии с этим скорости и развиваемые поршнем усилия при ходе в обе стороны будут также равны.
При й ф Б \У 2 рабочая площадь
, Л (D2—rf2)
/ = —— ——— при движении поршня влево;
/ = ——- при движении поршня вправо.
Минимальная разница площадей подобного дифференциального поршня ограничена его силой трения.
>2Н L И .
п — “ £ 4 — 1*1 ■-:’тй
Рис. 140. К расчету габариРис. 141. Телескопические силовые цилиндры тов силовых цилиндров
В тех случаях, когда необходимо получить в обычной схеме вклю чения цилиндра одинаковые усилия при постоянном давлении или оди наковую скорость при постоянном расходе жидкости, цилиндр снабжают ложным штоком того же диаметра, что и силовой шток (см. рис. 138,6). Однако при применении подобных цилиндров увеличиваются габариты
| машины, так как шток выходит | |
| по обе стороны за цилиндр. Не | |
| трудно видеть (рис. 140), что если | |
| габариты цилиндра с односторон | |
| ним штоком при ходе Я больше | |
| 2Я, то габариты цилиндра с | |
| двухсторонним штоком при этих | |
| условиях больше ЗЯ. | |
| в схеме с двухсторонним | штоком |
| подвижным сделать цилиндр, а | |
Рис. 142. Силовой цилиндр с фиксирован | неподвижным поршень, | то габа |
риты его будут равны | габариту | |
ным средним положением поршня | цилиндра с односторонним што | |
 Однако если
Однако есликом.
Кроме того, цилиндры с двухсторонним штоком более сложны в изготовлении, так как необходимо выдержать строгую концентричность трех поверхностей — внутренних в цилиндре и внешних на поршне и штоках.
Для получения больших ходов применяют телескопические цилинд ры, состоящие из нескольких (до шести) цилиндров (рис. 141). Под телескопическим силовым гидроцилиндром в общем случае понимают силовой гидроцилиндр, общий ход штоков которого превышает длину корпуса цилиндра.
208
Габарит телескопического силового Цилиндра равен
L > {x+ l)H , | (261) |
где х — число подвижных частей; Я — ход.
На рис. 142 изображен цилиндр, поршень которого имеет фиксиро ванное промежуточное между крайними положение. В это положение он устанавливается при одновременной подаче жидкости в левую а и пра вую b полости цилиндра.
Ж\\\\\Жчччччт
Рис. 143. Схема силового цилиндра с неподвижным поршнем
Нередко представляется целесообразным соединять с движущейся (перемещаемой) частью машины не шток, а цилиндр. Жидкость в ци линдр в этом случае подводят через гибкие трубопроводы (шланги) либо через пустотелые штоки (рис. 143,а). На рис. 143,6 представлен разрез подобного штока, обеспечивающего питание движущегося ци линдра двухстороннего действия через односторонний шток. Шток вы полнен в виде обработанной по внутренней поверхности трубы 1, в кото рую запрессован стержень 2 с профрезерованными продольными паза ми а, образующими после сборки каналы для потока жидкости. Для обеспечения герметичности места контакта стержня с трубой пропаи вают оловом. Обычно для этого на стержне 2 выполняют допол нительные продольные пазы б,
Для обеспечения герметичности места контакта стержня с трубой пропаи вают оловом. Обычно для этого на стержне 2 выполняют допол нительные продольные пазы б,
в которые до вставления стержня |
| ||
в трубу закладывают олово, кото |
| ||
рое при последующем нагреве за |
| ||
полняет зазоры. |
|
| |
ма | На рис. 144 изображена схе |
| |
цилиндра | со ступенчатым |
| |
поршнем, применяя который мож | Рис. 144 Схема силового цилиндра со сту | ||
но | получить | несколько скоро | пенчатым поршнем |
стей. | />• | ||
4 | |||
|
| ||
 4
4На рис. 145 приведена схема тандемного силового цилиндра, при мененного в гидросистеме сверхзвукового самолета, в котором для на дежной герметизации штока, выходящего наружу и связывающего поршни обоих цилиндров, применены двухступенчатые уплотнения (см. стр. 418) с дренажированием, изключающим как вытекание жидко сти наружу, так и перетекание ее из одного цилиндра в другой. Послед нее важно при работе одного из цилиндров на аварийном питании топ ливом двигателей.
Полости а, расположенные между уплотнительными кольцами каж дого уплотнительного угла, соединены с соответствующей сливной ли нией и полости Ь, расположенные между уплотнительными узлами, — с атмосферой.
к. п. Д. СИЛОВЫХ ЦИЛИНДРОВ
Рассмотренная выше величина движущего усилия [см. выражение (258)] — величина без учета потерь от трения движущихся частей.
С учетом этих потерь фактическое движущее усилие
р ф = р п* | (262) |
где г|мех= ——механический к. п. д. силового цилиндра, | величина ко- |
рторого в зависимости от различных факторов колеблется от 0,97 до 0,85; среднее значение ‘Пмех= 0>95.
210
[PDF] Разработка гидромеханической гидравлической гибридной трансмиссии с независимым управлением крутящим моментом колеса для городского пассажирского транспортного средства title={Разработка гидромеханической гидравлической гибридной трансмиссии с независимым управлением крутящим моментом колеса для городского легкового автомобиля}, автор = {Джеймс Д. Ван де Вен, Майкл Уильям Олсон и Перри Ю. Ли}, год = {2007} }
- Дж. Вен, М. В. Олсон, Перри Ю. Ли
- Опубликовано в 2007 г.
- Машиностроение
В этом документе представлена гидравлическая гибридная трансмиссия для повышения топливной экономичности легкового автомобиля. Разработанная гидромеханическая трансмиссия позволяет независимо регулировать крутящий момент на каждом колесе. Мотивом для разработки этой трансмиссии является испытательный стенд гидравлического гибридного автомобиля для Центра компактной и эффективной гидроэнергетики в Университете Миннесоты. Гидромеханическая гибридная трансмиссия моделируется и сравнивается с серийной гибридной трансмиссией, работающей на EPA…
Разработанная гидромеханическая трансмиссия позволяет независимо регулировать крутящий момент на каждом колесе. Мотивом для разработки этой трансмиссии является испытательный стенд гидравлического гибридного автомобиля для Центра компактной и эффективной гидроэнергетики в Университете Миннесоты. Гидромеханическая гибридная трансмиссия моделируется и сравнивается с серийной гибридной трансмиссией, работающей на EPA…
me.umn.edu
Оптимизация гибридного гибридного транспортного средства пассажира для улучшения экономии топлива
- K. Stelson, Jonathan Meyer, A. Alleyne, B. Отсюда
Инженерия
- 2008
- 9000
This исследует стратегии управления питанием гидравлических гибридных пассажирских транспортных средств. Параллельные, последовательные и распределенные архитектуры моделируются и исследуются в среде Matlab с использованием…
Оптимизация и управление гибридным гидравлическим пассажирским транспортным средством на основе гидромеханической трансмиссии
- Perry Y.
 Li, F. Mensing
Li, F. Mensing Engineering
- 2010
Архитектура гибридного гидравлического транспортного средства на основе гидромеханической трансмиссии (HMT) потенциально более эффективна, чем другие архитектуры, потому что: 1) она использует эффективную механическую трансмиссия для…
Анализ и контроль проектирования гидромеханического гидравлического гибридного пассажирского транспортного средства
- Т. Сим, Перри Ю. Ли
Инженерное дело
- 2009
В статье представлен динамический анализ трансмиссии с гидромеханической трансмиссией (ГМТ) с рекуперацией и независимым регулированием крутящего момента на колесах гидравлического гибридного пассажирского транспортного средства. Отсюда…
Гидравлический гибридный пассажирский автомобиль: возможности экономии топлива
- Т. Барбоза, Леонардо Адольфо Родригес да Силва, Ф. Пужатти, Х. Гутьеррес
Инженерия, наука об окружающей среде
Проектирование конструкций и машин на основе механики
- 2020
В этой работе предлагается смоделировать малосерийное гидравлическое гибридное транспортное средство (SHHV) для потребления энергии в реальном ездовом цикле с помощью недорогого сканера Bluetooth.
Использование гидравлической гибридной трансмиссии в легковых автомобилях
- М. Сидлецкий, Й. Меркиш
Машиностроение
- 2015
Основным фактором, влияющим на структуру всех современных двигателей внутреннего сгорания и правила выбросов от выхлопных систем. С 2020 года ожидается применение лимита среднего…
Стратегия управления энергопотреблением для гидравлического гибридного транспортного средства
Предлагаемый метод проектирования повышает эффективность работы трансмиссии за счет нахождения наилучшего баланса между оптимизацией эффективности отдельных компонентов и структурой управления с прогнозированием модели.
Моделирование серийной гибридной гидравлической трансмиссии легкового автомобиля в г. Хопсан
- К. Баер, Лизелотт Эриксон, П. Крус
Инженерное дело
- 2013
Гидравлические гибриды продолжают привлекать внимание как возможное решение в поисках улучшенной экономии топлива для различных типов транспортных средств.
В данной статье представлена модель серийного гидравлического гибридного…Моделирование эффективности и экспериментальная проверка рычажного насоса с переменным рабочим объемом
- S. Wilhelm, J. Ven
Engineering
- 2013
- Zhekang Du, T. Cheng, Perry Y. Li, Kai Loon Cheong, T. Chase для аппаратных испытаний гибридных транспортных средств предлагается и экспериментально оценивается. Гидростатический динамометр, который…
Проектирование и экспериментальная проверка концепции управления виртуальным транспортным средством для испытаний гибридных транспортных средств с использованием гидростатического динамометра
- Жекан Ду, Перри Й. Ли, Кай Лун Чеонг, Т. Чейз гибридные автомобили были разработаны и испытаны экспериментально. Используемый гидростатический динамометр, который…
ПОКАЗЫВАЕТ 1-10 ИЗ 11 ССЫЛОК
СОРТИРОВАТЬ ПОРелевантность Наиболее влиятельные документыНедавность
Математическое моделирование гидростатических насосов и двигателей
- Д. Маккэндлиш, Р. Дори
Машиностроение
- 1984
Точные математические модели гидростатических насосов и двигателей необходимы для синтеза и анализа гидравлических систем. Модели все чаще используются в компьютерном моделировании, где…
Концепция открытого аккумулятора для компактного хранения энергии на жидкости
- Perry Y. Li, J. Ven, Caleb J. Sancken
Engineering, Environmental Science
- 2007
Накопители энергии для гидравлических систем, которые значительно более компактны, чем существующие, обеспечат рекуперацию энергии для многих приложений, включая гидравлические гибридные транспортные средства…
- H. C. Tu, M. Rannow, J. Ven, Meng Wang, Perry Y. Li, T. Chase. высокоскоростной двухпозиционный клапан. Высокоскоростные клапаны повышают эффективность системы для заданной частоты ШИМ, предлагают…
Основы динамики транспортных средств
- Т. Гиллеспи
Математика
- 1992
Доктор Томас Гиллеспи, признанный во всем мире специалист по динамике транспортных средств, создал идеальную книгу, которая инженерам в течение 30 лет, от введения до…
Гидростатические трансмиссии с разделением мощности для колесных транспортных средств — классификация и теория работы
- Джеймс Х. Кресс
Компьютерная наука
- 1968
Пневматические приступающие системы для автоматического оборудования: Структура и дизайн
- I. Krivts, G. Krejnin
Инженерная
- 2006 9000
. Системы Пневматические системы для управления скоростью Пневматические системы для управления силой ПНЕВМАТИЧЕСКИЕ ПРИВОДЫ Линейные приводы Роторные приводы…
Ротационно-насосная теория
ASME Transactions
- 1946
Интегрированная система гидравлического привода для автомобилей, «Fluid
- 1988
Проектирование регенеративного гидростатического передачи мощности для городской автобусы».
Трансмиссии для транспортных средств- 1981
Департамент энергетикиИнтегрированная система гидравлической трансмиссии для автомобилей
0017
- 1988
Гидромеханический IVT | KD Solutions
Коммерческие решения Kinetics Drive Solutions предназначены для силовых установок в диапазоне высокой мощности (л.с.) от +250 л.с. до 1500 л.с. включительно. Гидромеханическая серия обеспечивает параллельный путь передачи мощности через трансмиссию, что позволяет ей непрерывно передавать мощность в сочетании гидравлического и механического режимов. При работе на низкой скорости гидромеханические бесступенчатые трансмиссии (HM-IVT) компании Kinetics Drive Solutions позволяют двигателям развивать высокий крутящий момент на очень малых скоростях. При работе на высоких скоростях трансмиссия почти полностью работает в механическом режиме, обеспечивая значительную эффективность наряду с превосходной эффективностью на высоких скоростях.
Конструкции Kinetics Drive Solution обеспечивают решения для тяжелых режимов работы и приложений с высоким крутящим моментом, а также для двигателей с узким диапазоном или постоянными требованиями к частоте вращения.Октоген 1100
Предназначен для гусеничных машин массой до 21 т с двигателем мощностью до 400 л.с. HMX 1100 имеет бесступенчатую регулировку как в прямом, так и в обратном направлении и может работать на одинаковых скоростях. HMX обладает двумя особенностями, отсутствующими в обычных системах трансмиссии гусеничных машин: 1) стабильная реакция рулевого управления независимо от направления и 2) гидростатическое торможение, обеспечивающее длительный срок службы и меньший объем технического обслуживания тормозов.
октоген 1600
Предназначен для гусеничных машин массой до 28 тонн с двигателями мощностью до 600 л.с. HMX 1600HD имеет бесступенчатую регулировку как для прямого, так и для обратного направления и полностью способен работать с одинаковыми скоростями.
HMX 1600HD предлагает все те же функции, что и HMX 1100, с добавлением мощного механизма отбора мощности (ВОМ) для специальных применений, требующих мощности до 300 л.с.HMX 3000
Предназначен для гусеничных машин массой до 30 тонн с двигателями мощностью до 800 л.с. HMX 3000 имеет бесступенчатую регулировку как в прямом, так и в обратном направлении и может работать с одинаковой скоростью в обоих направлениях. В HMX 3000 используются легкие вариаторы Kinetics со встроенным насосным двигателем (IPM). Конструкция обеспечивает передачу с очень высокой удельной мощностью.
HMX 3500
Предназначен для гусеничных машин массой до 45 тонн с двигателями мощностью до 1000 л.с. HMX 3500 имеет бесступенчатую регулировку как для прямого, так и для обратного направления и полностью обеспечивает одинаковую скорость в обоих направлениях. В HMX 3500 используются легкие вариаторы со встроенным насосным двигателем (IPM) от Kinetics Drive Solutions. Конструкция обеспечивает очень высокую удельную мощность передачи.
Эта трансмиссия разработана с учетом потребности в мобильности существующих транспортных средств с учетом ограниченного пространства. HMX 3500 может управлять первичным двигателем мощностью 1000 л.с. в том же пространстве, что и существующая трансмиссия мощностью 800 л.с.Технические преимущества OEM
Долговечность
Коробки передач Kinetics обеспечивают диапазон передаточных чисел от бесконечности до повышающей передачи и не требуют приводного ремня, гидротрансформатора или комплекта шестерен заднего хода.
Высокая масштабируемость
Решения Kinetics Drive масштабируемы по своей природе благодаря встроенному насосному двигателю (IPM) вместо традиционного вариатора. IPM можно объединять в несколько параллельных систем, что делает гидромеханические бесступенчатые трансмиссии подходящими для широкого спектра применений.
Extreme Speed Control
Наши гидромеханические бесступенчатые трансмиссии обеспечивают автомобилям одинаковую скорость как вперед, так и назад.
Кроме того, там, где это необходимо, они обеспечивают экстремальную скорость медленного передвижения без необходимости в сильном рассеивании тепла.Гидростатическое торможение
Использование гибридной гидромеханической бесступенчатой трансмиссии позволяет разработчикам транспортных средств использовать гидравлические функции для торможения с задержкой, а также для управления двигателем.
Системы рулевого управления
Серия гусеничных трансмиссий HMX обеспечивает бесступенчатое, гидростатически-рекуперативное, двунаправленное рулевое управление
с опциональным управлением по проводам.Эксплуатационные преимущества
Повышенная производительность
Позволяя двигателям — независимо от применения — работать в оптимальном диапазоне, гидромеханические бесступенчатые трансмиссии Kinetics Drive Solutions улучшают общие характеристики автомобиля.
Снижение затрат
В то время как гибридные и электрические транспортные средства обеспечивают экономию топлива, транспортное средство с традиционным двигателем с гидромеханической бесступенчатой трансмиссией Kinetics Drive Solutions устранит выбросы с меньшими затратами.
Повышение топливной эффективности
Благодаря внедрению интеллектуальной системы датчиков и обратной связи во все трансмиссии Kinetics Drive Solutions обеспечивает эффективность трансмиссии при переменных нагрузках и условиях местности. Трансмиссия автоматически уравновешивает производительность в соответствии с требованиями привода и обеспечивает топливную экономичность двигателя.
Увеличение срока службы двигателя
Работа двигателей в «наилучшей зоне» помогает уменьшить износ, вызванный типичной перегрузкой и недогрузкой, вызванной дискретными переключениями передач, которые не могут разумно справляться с потребностями в мощности с учетом требований оператора и рельефа местности.
Улучшенный опыт оператора
Принимая важные решения о производительности для водителей, гидромеханические бесступенчатые трансмиссии Kinetics Drive Solutions позволяют операторам сосредоточиться на своей основной задаче — вождении, копании, планировке или сборе урожая для достижения оптимальной эффективности и производительности.
- Жекан Ду, Перри Й.
5 Плотность гидравлической мощности трансмиссии делают машины с переменным рабочим объемом привлекательными для широкого спектра применений, таких как мобильные гибридные системы, приведение в действие с регулируемым рабочим объемом тяжелых…
Концепция виртуального управления транспортным средством для управления гидростатическим динамометром
- Perry Y.