Saxomat | это… Что такое Saxomat?
Saxomat — фирменное название системы автоматического электропневматического привода сцепления производства Fichtel & Sachs AG, устанавливавшейся в качестве опции на ряд европейских автомобилей 1950—1960-х годов, включая Fiat 1800, Saab, Volkswagen Beetle, Borgward, Goliath, DKW, BMW, NSU, Glas.
Фирма Opel продавала её под названием Olymat.
Близкая по функциональности система устанавливалась на рубеже 1950—1960-х годов на автомобили Mercedes-Benz под названием Hydrac, она отличалась наличием гидротрансформатора, как в автоматической трансмиссии, вместо использовавшегося в системе Saxomat второго центробежного сцепления.
На восточногерманских автомобилях Trabant и Wartburg устанавливалась похожая самостоятельно разработанная система, называвшаяся Hycomat (отличалась использованием гидроприводов вместо пневматики)
В практике советского автомобилестроения похожая система автоматического электропневматического сцепления устанавливалась на инвалидные модификации автомобилей, в основном — ЗАЗ (ЗАЗ-968МР).
По мере распространения в Европе «настоящих» автоматических трансмиссий, автоматическое сцепление Saxomat и его аналоги вышли из употребления, но в 1990-е годы их идея (но не принцип действия) была возрождена фирмой Saab в виде системы Sentronic. В наши дни применяются системы автоматического сцепления, имеющие сходный принцип действия, но как правило иное техническое исполнение — например, российская электромагнитная система «МегаМатик», устанавливавшаяся на инвалидные модификации «Оки».
Содержание
|
Устройство
Система Saxomat имела два сцепления: одно — обычное, с пневматическим приводом, а второе — центробежное (центрифугальное), отключающееся автоматически при падении оборотов двигателя до минимального значения.
Управление автомобилем с полуавтоматической трансмиссией Saxomat напоминало нечто среднее между управлением автомобилями с механической и автоматической трансмиссией.
Педалей было всего две — тормоз и акселератор, как на автомобилях с автоматической трансмиссией, однако передачи водителю все-таки приходилось переключать вручную.
Работой сцепления управлял сложный электропневматический блок, представляющий собой систему электроуправляемых клапанов. Его работой управлял датчик (микровыключатель) положения рычага коробки передач и дроссельная заслонка карбюратора. Исполнительным механизмом служила диафрагма, приводимая в действие разрежением во впускном коллекторе двигателя, как в вакуумном усилителе тормозов. На случай остановки двигателя разрежение запасалось в ресивере, за счёт чего система какое-то время могла работать и при заглушенном моторе. Предусматривалась зависимость скорости включения сцепления от силы нажатия на акселератор — при резком нажатии система отпускала сцепление быстрее, делая старт автомобиля более динамичным.
Чтобы тронуться с места на автомобиле с трансмиссией Saxomat, требовалось перевести рычаг коробки передач на первую передачу (сцепление выключалось автоматически при прикосновении к рычагу переключения) и нажать на педаль акселератора (чтобы «отпустить» сцепление), после чего срабатывал калиброванный клапан в блоке управления, постепенно наполняющий полость диафрагменного механизма воздухом, благодаря чему сцепление плавно отпускалось и машина без рывков трогалась.
При езде водитель переключал передачи как обычно, но без выжимания сцепления, также выключая сцепление прикосновением к рычагу и включая его нажатием на акселератор; переключения также производились мягко и без рывков. Система допускала использование торможения двигателем. Как и на автомобиле с АКПП, машину, оснащенную Saxomat, можно было полностью остановить, не выключая передачи, при этом срабатывало второе (центробежное) сцепление, и двигатель, работающий на холостом ходу, оказывался разобщен с трансмиссией. Чтобы тронуться — достаточно было вновь нажать на акселератор. Этот режим работы был особенно удобен для движения в заторах.
Принцип работы
Поясняется на примере трансмиссии Hycomat, устанавливавшейся на автомобили Trabant и Wartburg. В отличие от чисто пневматической системы Saxomat, Hycomat использовал гидропривод.
Преимущества и недостатки
Система Saxomat и её аналоги существенно упрощали управление автомобилем, делали его более приятным.
Однако вследствие сложной для тех лет конструкции надежность автоматического сцепления была невысока. В этом система уступала как обычной механической, так и гидромеханической автоматической трансмиссии. Кроме того, Saxomat требовал определённого навыка при использовании — хотя сцепление и управлялось автоматикой, водителю приходилось самостоятельно переключать передачи и, работая педалью акселератора, уравнивать скорости валов в коробке передач для достижения плавного и бесшумного переключения (что значительно усугублялось тем, что часто эту систему применяли в паре с коробками, у которых синхронизаторы имелись лишь на двух-трёх высших передачах).
Несовершенство действовавшего по примитивному алгоритму элекропневматического блока, не имевшего возможности полноценно адаптироваться к реальным дорожным условиям, накладывало определённые ограничения на сам процесс вождения. Полноценно эту задачу позволяло решить лишь внедрение сложных электронных устройств с программным управлением, ставших доступными на массовых автомобилях лишь с 1990-х годов.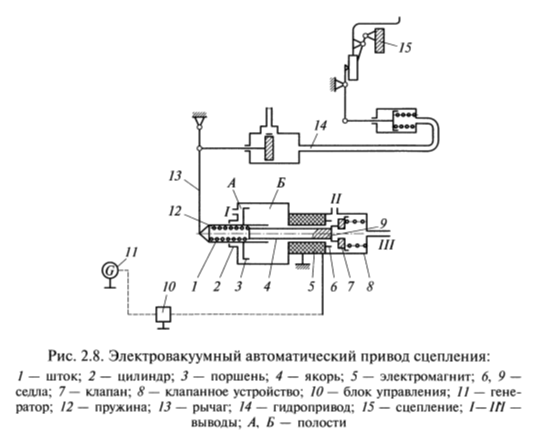 В 1960-е же годы эта система довольно быстро вышла из употребления вскоре после распространения в Европе настоящих АКПП.
В 1960-е же годы эта система довольно быстро вышла из употребления вскоре после распространения в Европе настоящих АКПП.
В 1990-е годы на автомобилях SAAB кратковременно предлагалась похожая на Saxomat по действию, но отличная по конструктивному исполнению система автоматического сцепления Sentronic, использовавшая сложный электронный блок управления. Система была лишена практически всех свойственных Saxomat недостатков, но также не отличалась надёжностью (на многих автомобилях трансмиссия впоследствии была заменена традиционным сцеплением).
Ссылки
- Рекламный проспект, объясняющий устройство и принцип действия системы.
- Объяснение действия трансмиссии Olymat, версии «Саксомата», устанавливавшейся на «Опели».
Исследование динамики управляемого электромеханического привода сцепления автомобиля
Автореферат диссертациина тему «Исследование динамики управляемого электромеханического привода сцепления автомобиля»
На правах рукописи
ЕМЕЛЬЯНОВ ИВАН ПАВЛОВИЧ
ИССЛЕДОВАНИЕ ДИНАМИКИ УПРАВЛЯЕМОГО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА СЦЕПЛЕНИЯ АВТОМОБИЛЯ
Специальность 01. 02.06 — Динамика, прочность машин,
02.06 — Динамика, прочность машин,
приборов и аппаратуры
АВТОРЕФЕРАТ диссертации на соискание ученой степени кандидата технических наук
□03162412
Курск — 2007
003162412
Работа выполнена в Курском государственном техническом университете на кафедре теоретической механики и мехатроники
Научный руководитель
доктор технических наук, профессор Яцун Сергей Федорович
Официальные оппоненты
доктор технических наук, профессор Головин Александр Александрович
кандидат технических наук, доцент Шебанов Алексей Николаевич
Ведущая организация
Орловский государственный технический университет
Защита состоится « 08 » ноября 2007 г в 14 ч _00_ мин в конференц-зале на заседании диссертационного совета Д212 105 01 при Курском государственном техническом университете по адресу 305040, г Курск, ул 50 лет Октября, 94
С диссертацией можно ознакомиться в библиотеке Курского государственного технического университета
Автореферат разослан «У-» октября 2007 г
Ученый секретарь диссертационного совета
Локтионова О Г
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ Актуальность темы. Одна из наиболее актуальных проблем современного автомобилестроения — упрощение и облегчение управления автомобилем — не может быть решена без автоматизации привода сцепления Как показывает опыт создания автоматических трансмиссий, их совершенствование идет в двух направлениях- автоматизация управления механическими трансмиссиями, состоящими из ступенчатой коробки передач и фрикционного сцепления, и оснащение автомобилей автоматическими специализированными трансмиссиями
Одна из наиболее актуальных проблем современного автомобилестроения — упрощение и облегчение управления автомобилем — не может быть решена без автоматизации привода сцепления Как показывает опыт создания автоматических трансмиссий, их совершенствование идет в двух направлениях- автоматизация управления механическими трансмиссиями, состоящими из ступенчатой коробки передач и фрикционного сцепления, и оснащение автомобилей автоматическими специализированными трансмиссиями
Трансмиссии с автоматизированным приводом сцепления обладают достаточно широкими функциональными возможностями, что в определенной мере приближает достигаемый при их помощи комфорт управления к полностью автоматическим трансмиссиям Также, по своему устройству автоматизированные трансмиссии гораздо проще и дешевле полностью автоматических
Если брать во внимание российскую автомобильную промышленность, которая практически не устанавливает на выпускаемые автомобили автоматические трансмиссии, то автоматизация управления сцеплением является оптимальным решением при упрощении и облегчении управления автомобилями, особенно если их используют инвалиды с нарушениями функций левой ноги
Таким образом, одним из актуальных направлений автомобилестроения является исследование динамики и разработка конструкций автоматизированных приводов механических сцеплений Имеются разработки в этом направлении, такие, как электромагнитный привод «Мегаматик», созданный ООО «ОКА-АВТО» совместно с НПП «АВТОПРИВОД», электровакуумный привод «ЭПС», разработанный специалистами из НАМИ и СеАЗа, электромеханический привод «Twin clutch», сконструированный в Корее и др Однако, несмотря на наличие устройств данного вида, их развитие сдерживается из-за отсутствия единой методики проектирования
Необходимость разработки и создания эффективных математических моделей и алгоритмов расчета управляемых приводов сцеплений автомобилей, позволяющих значительно повысить ресурс и надежность трансмиссий, а, следовательно, и самих автомобилей, улучшить их динамические характеристики и создать конструкции, соответствующие современным требованиям к техническим и технологическим возможностям автомобильных узлов и агрегатов, определяет актуальность темы данного исследования
Объектом исследования данной работы являются динамические процессы, протекающие в сложной мехатронной системе, состоящей из привода ведущего вала сцепления автомобиля, электромеханического привода выключения сцепления и системы автоматического управления приводами
Целью диссертационной работы является повышение эффективности работы сцепления автомобиля за счет применения управляемого электромеханического привода
Повышение эффективности заключается в снижении ударных динамических нагрузок в трансмиссии, сужении диапазона падения частоты вращения ведущего вала при включении сцепления, уменьшении влияния человеческого фактора на надежную работу сцепления, облегчении управления сцеплением
Для достижения цели работы были поставлены и решены следующие задачи
1) анализ существующих технических решений и выбор способа управления автомобильным сцеплением,
2) разработка расчетной схемы и математической модели динамики сцепления и его привода,
3) исследование динамики управляемого электромеханического привода сцепления автомобиля;
4) разработка методики проведения эксперимента и экспериментального стенда с автоматической обработкой результатов,
5) проведение экспериментальных исследований динамики управляемого электромеханического привода сцепления автомобиля,
6) разработка программного обеспечения для управления сцеплением автомобиля посредством электромеханического привода,
7) разработка рекомендаций по проектированию управляемых электромеханических приводов автомобильных сцеплений
Методы исследования. Для решения поставленных задач использовались теория математического моделирования, законы теоретической механики и динамики машин, законы электродинамики, теория автоматического управления, а также методы математического моделирования, численного решения уравнений с применением ПЭВМ, цифровой обработки сигналов
Для решения поставленных задач использовались теория математического моделирования, законы теоретической механики и динамики машин, законы электродинамики, теория автоматического управления, а также методы математического моделирования, численного решения уравнений с применением ПЭВМ, цифровой обработки сигналов
Достоверность полученных результатов обеспечена корректностью постановки задачи, обоснованностью использованных теоретических зависимостей и принятых допущений, применением известных математических методов, подтверждается сравнительным анализом результатов, полученных теоретически и в результате лабораторных испытаний, а также экспертизой предложенных в работе научно-технических решений Роспатентом
Научная новизна:
— разработана математическая модель управляемого электромеханического привода сцепления, рассматриваемого как мехатронная система, адекватно описывающая процессы взаимодействия фрикционных дисков сцепления, зависящие от угла поворота вала мотор-редуктора привода выключения сцепления,
— предложена математическая модель упругой нелинейной характеристики диафрагменной пружины сцепления, анализ которой позволил выделить диапазон с квазинулевой и отрицательной жесткостью,
— установлено, что оптимальное регулирование скорости вращения ведомого вала сцепления возможно за счет управляемого включения сцепления с одновременным управлением скоростью вращения ведущего вала сцепления,
— разработана система автоматического управления приводом ведущего вала сцепления и электромеханическим приводом выключения сцепления.
Практическая ценность. В результате проведенных исследований сконструирован и изготовлен экспериментальный стенд, оснащенный управляемым электромеханическим приводом сцепления, а также разработано программное обеспечение, позволяющее осуществлять управление процессом выключения и включения сцепления Результаты работы внедрены в производственный процесс Автотракторного управления ОАО «Лебединский ГОК» (Белгородская обл, г Губкин) и используются для диагностики и дефектовки автомобильных сцеплений и их приводов Также, результаты диссертации используются в учебном процессе Курского государственного технического университета
Апробация работы. Основные положения диссертации докладывались и обсуждались на VII Международной научно-технической конференции «Вибрация — 2005 Вибрационные машины и технологии» (Курск КурскГТУ, 2005), IV Международной научно-технической конференции «Современные инструментальные системы, информационные технологии и инновации» (Курск КурскГТУ, 2006), Международной научно-практической Интернет^ конференции «Проблемы создания и совершенствования строительных и дорожных машин» (Белгород. Изд-во БГТУ им В Г Шухова, 2006), Международной научно-практической конференции «Образование, наука, производство и управление» (Старый Оскол СТИ МИСиС, 2006), Международной научно-технической конференции «Актуальные проблемы динамики и прочности материалов и конструкций- модели, методы, решения» (Орел: ОрелГТУ, 2007)
Изд-во БГТУ им В Г Шухова, 2006), Международной научно-практической конференции «Образование, наука, производство и управление» (Старый Оскол СТИ МИСиС, 2006), Международной научно-технической конференции «Актуальные проблемы динамики и прочности материалов и конструкций- модели, методы, решения» (Орел: ОрелГТУ, 2007)
Публикации. По материалам диссертации опубликовано 12 научных работ, включая 8 статей в научных сборниках и журналах, одна из которых в издании, рекомендованном ВАК, 3 патента Российской Федерации на полезную модель и 1 свидетельство об официальной регистрации программы для ЭВМ
Личный вклад автора: на основе выполненного анализа отечественных и зарубежных литературных источников разработана расчетная схема и математическая модель управляемого электромеханического привода сцепления, создан экспериментальный стенд с автоматической обработкой результатов для исследования динамики управляемого электромеханического привода сцепления автомобиля, разработана система автоматического управления приводом ведущего вала сцепления и электромеханическим приводом выключения сцепления, состоящая из силовой, информационной и управляющей подсистем.
Структура и объем работы Диссертация состоит из введения, четырех глав, заключения и библиографического списка, включающего 111 наименования Объем диссертации 121 страница машинописного текста, 62 рисунка, 2 таблицы
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ Во введении обосновывается актуальность темы, определяется цель и задачи исследования Сформулированы научные результаты и положения, выносимые на защиту, определена их научная новизна и практическая значимость, приведены сведения об апробации и внедрении работы Кратко излагается содержание глав диссертации.
В первой главе приведена классификация и применяемость сцеплений и приводов управления сцеплениями, исследовано современное состояние вопроса в области разработки и расчета автоматизированных приводов сцеплений автомобилей Рассмотрены способы управления сцеплением и определены преимущества и недостатки каждого из способов для различных режимов работы сцепления. Проведен обзор и анализ существующих конструкций управляемых приводов сцеплений, выявлены их достоинства и недостатки К недостаткам можно отнести наличие дополнительных источников энергии, не изменяемая интенсивность включения сцепления, отсутствие возможности торможения двигателем и др
Проведенный анализ позволил выявить такие основные преимущества электромеханического привода, как простота конструкции, отсутствие необходимости оборудования автомобиля дополнительным источником энергии, возможность установки на широкий круг легковых автомобилей, снижение ударных динамических нагрузок в трансмиссии
Кроме того, описаны преимущества электроприводов постоянного тока и проанализированы способы регулирования частоты вращения вала электродвигателя
В заключение первой главы определяется цель и задачи исследования Во второй главе рассматриваются вопросы моделирования динамики управляемого электромеханического привода сцепления. ■к-к
■к-к
и +./„)—=М-М. если М>М0 ек ‘ *
О)
где Зс — приведенный момент инерции вращающихся масс двигателя и ведущих деталей сцепления, </„ — приведенный момент инерции вращающихся масс нагрузки, Ме — крутящий момент двигателя, Мс — момент трения, передаваемый сцеплением; Ма — момент сопротивления вызванный действием нагрузки,
(»1 — угловая скорость ведущего вала сцепления, а>2 — угловая скорость ведомого вала сцепления.
Л
Л
«.о
Си, у
-1— ДВигатвль
1 /
Ма
Мс ы, V \ \
О
о
/ 1
о
Рис 1 Расчетная динамическая схема трансмиссии автомобиля
В качестве привода ведущего вала сцепления принят асинхронный элекгродвигатель, крутящий момент Ме которого определяется его механической характеристикой
Момент Ма, вызванный действием нагрузки, принят равным постоянному значению которое лежит в пределах механической характеристики электродвигателя привода ведущего вала сцепления
Момент, передаваемый сцеплением описан следующим выражением
Мс = гср с fTP s(t), (2)
где гср — средний радиус трения дисков сцепления, с — коэффициент жесткости диафрагменной пружины сцепления, fw — коэффициент трения фрикционных накладок, s(t) — осевое перемещение диска сцепления
На рис 2 представлена расчетная схема привода выключения сцепления, имеющая одну степень свободы
4
_„
-с——ни у МеР
Рис 2 Расчетная схема привода сцепления 1 — кривошип; 2 — трос, 3 — вилка сцепления, 4 — выжимной подшипник
Математическая модель привода сцепления строится с помощью уравнения движения системы в обобщенных координатах или уравнения
Лагранжа II рода За обобщенную координату системы принят угол ср — угол поворота кривошипа, причем 0<<р<~
= -ЁИ+М -м dt\d<p) dtp dtp «F сп’
где Т- кинетическая энергия системы; П— потенциальная энергия системы, Мдр — вращающий момент, Men — момент сопротивления
(3)
Кинетическая энергия всей системы
щ А
Г г 2 \
m,-L, , ■
———+1и,-Ln„ 12 3 °,s
L\ cos2
2(V»(A smp + Z-4)2)
m4 Ц cos2 tp
(L л 2 \
Т
\ Ofi J У
(4)
где mi,m3>m4— масса первого, третьего и четвертого звена соответственно, L,Lt,L2,L3,Lof,Los,Ьоф — длины звеньев и отрезков Массой троса 2 пренебрегаем
Потенциальная энергия деформированной пружины с коэффициентом жесткости с3
п_ сг <рг ¿,’Л/ C0s> (5)
2 Lo;-2 (Asm^+L-4)2 Уравнение вращающего момента записано в виде механической характеристики электродвигателя постоянного тока
Мвр=к<р+Ъ, (6)
/ b и
где к =—, Ъ — максимальное значение момента на валу,
<*>ном
<Яном — номинальная угловая скорость
Момент сопротивления, вызванный действием пружины сцепления ,, L’-L ■costp sin^
Мсп= с -, (7)
где с — коэффициент жесткости диафрагменной пружины сцепления
Упругую характеристику диафрагменной пружины аппроксимируем следующим выражением, учитывая ее специфику приведенную в литературных источниках»
Р{х) = Н + А е’** сов^г лг + агссоз^—(8) где Н, А, т, ¿—коэффициенты.
Решением уравнения (8) является графическая зависимость, представленная на рис 3 Зависимость жесткости диафрагменной пружины от
перемещения с(х) = ~ Р(х) представлена на рис 4
Рис 3 Упругая характеристика Рис 4 Жесткость диафрагменной диафрагменной пружины при пружины при Н = А~ 2500,
Н = А = 2500, т = 1100, к = 400 г = 1100, к = 400
Результатом численного решения системы уравнений (1) является графическая зависимость угловых скоростей валов, представленная на рис 5
Третья глава посвящена разработке экспериментального стенда для исследования динамики управляемого электромеханического привода сцепления автомобиля Определена экспериментальным путем механическая характеристика электродвигателя переменного тока и проведены экспериментальные исследования для оценки работоспособности управляемого электромеханического привода сцепления, получения закономерности его работы и проверки адекватности, разработанной в диссертации математической модели
Схема экспериментального стенда представлена на рис 6 Основным элементом стенда является привод выключения сцепления, состоящий из
9
мотор-редуктора 6, троса 5, соединенного с рычагом на выходном валу мотор-редуктора. и вилки 4.
и вилки 4.
Рис. 6. Схема экспериментального стенда: I — электродвиг атель; 2 — сцепление; 3 — нагрузка; 4 — вилка; 5 — трос; 6 — мотор-редуктор; 7, 8 — датчики скоростей ведущего и ведомого валов; 9-датчик усилия; 10- датчик перемещения;
11 — ПЭВМ; 12 — конвертер; 13 — преобразователь частоты
Роль привода ведущего вала сцепления выполняет асинхронный электродвигатель 1 (NHOM = 180 Вт, nHtlM = J400 об/мин) подключенный к ПЭВМ 11 через частотный преобразователь 13 н конвертер 12, что позволяет бесступенчато регулировать частоту вращения вала. Эксперименты проводились при скорости вращения вала электродвигателя со = 50 рад/с. Программа управления стендом разработана в среде Borland С ++ и имеет пропорцией ал ьно-интеграль но-ди ф ф ере н ци альн ы й (ПИД) регулятор.
Для определения механической характеристики асинхронного двигателя па экспериментальный стенд установлено навесное оборудование изображенное на рис. 7.
Рис. 7. Экспериментальный стенд с Рис. -N с,
-N с,
N = 3P + -P., 2 ‘
■ сила вызванная действием груза, Pj-сосредоточенная нагрузка
(9)
(10)
(П)
Эксперименты проводились с приложением различных значений силы Р при изменении питающего напряжения электродвигателя. Полученная механическая характеристика асинхронного двигателя представлена на рис 9
а 7об/мин
6 9 12
Рис 9 Механическая характеристика асинхронного электродвигателя
При помощи программного обеспечения, которое поставляется вместе с модулем El4-140 фирмы L-card возможно отслеживать работу сцепления экспериментального стенда в реальном времени На экране отображаются последовательности импульсов, сформированные оптическими датчиками скорости вращения Полученный массив значений обрабатывается с помощью программно-вычислительного пакета Mathcad Professional 2001, в результате чего определяется угловая скорость вращения каждого вала по формуле
2 к 1000
oj ———, (12)
6 Т
где Т — усредненный период импульсов
Результатами проведения экспериментов являются графические зависимости рис 10, 11 изменения скоростей вращения валов сцепления от времени, сформированные математическим пакетом Mathcad Professional 2001 На графиках tmp — время торможения ведомого вала, а tm — время включения сцепления.
Рис 10 Включение сцепления без ПИД-регулирования
Рис 11 Включение сцепления с ПИД-регулированием
На рис 12, а представлена теоретическая зависимость скоростей вращения валов, где А <я, = 13 рад/с, а на рис 12, б — экспериментальная зависимость, где До, =14 рад/с
Рис 12 Графические зависимости изменения скоростей вращения валов сцепления а — теоретическая, б — экспериментальная
Сравнение теоретической и экспериментальной зависимостей скоростей вращения позволяет сделать вывод об адекватности математической модели реальному устройству и осуществить расчет основных параметров системы, обеспечивающих надежное осуществление процесса работы сцепления в переходном режиме
В четвертой главе дано описание конструкции и принципа работы экспериментального стенда Описана система автоматического управления электромеханическим приводом сцепления автомобиля, представленная в виде трех подсистем Исследована система автоматического управления в среде МаЛЬаЬ 8шш1тк
Экспериментальный стснд для исследования динамики управляемого электромеханического привода сцепления представлен на рис. 13.
13.
Рис. 13. Экспериментальный стенд
Система автоматического управления (САУ) электромеханическим приводом сцепления автомобиля (рис. 14) представлена в виде 3-х подсистем:
— силовой подсистемы?
— информационной подсистемы;
— управляющей подсистемы.
Силовая подсистема включает в себя привод М] ведущего вала 1 сцепления 2. которое передает крутящий момент ведомому валу 3. Также в силовую подсистему входит привод выключения сцепления, состоящий из мотор-редуктора М2 и рычажной системы.
Информационная подсистема включает в себя датчики Д1 и Д2 угловых скоростей ведущего 1 и ведомого 3 валов сцепления соответственно, датчик
13
усилия ДЗ, создаваемого приводом выключения сцепления, н датчик Д4 угла поворота выходного вала мотор-редуктор а М2.
Управляющая подсистема состоит из блока обработки сигналов датчиков, блока управления приводом ведущего вала сцепленяя, блока управления приводом выключения сцепления и центрального блока управления.
Моделирование работы САУ выполнено в среде МгцЬЬаЬ $тш1тк. На рис. 15 отчетливо видны нежелательные колебания при включении сцепления, а на рис.16 колебания отсутствуют благодаря введению ПИД-регулятора в систему управления.
Рис. 15. Зависимость скоростей Рис. 16. Зависимость скоростей валов валов без П ИД-регулирования при наличии П ИД-регулирован и я
ОСНОВНЫЕ РЕЗУЛЬТАТЫ РАБОТЫ
1. Проведен анализ существующих управляемых приводов сцепления автомобиля и выявлены такие основные преимущества электромеханического Привода как простота конструкции, отсутствие необходимости оборудования автомобиля дополнительным источником ‘энергии, возможность установки на широкий круг легковых автомобилей, снижение ударных динамических нагрузок в трансмиссии
2. Разработана математическая модель управляемого электромеханического привода сцепления, рассматриваемого как мехатронная система, учитывающая нелинейную характеристику диафрагменной пружины сцепления;
3. Установлена функциональная зависимость угловых скоростей вращения ведущего и ведомого валов сцепления от угла поворота вала мотор-редуктора привода выключения сцепления:
Установлена функциональная зависимость угловых скоростей вращения ведущего и ведомого валов сцепления от угла поворота вала мотор-редуктора привода выключения сцепления:
4. Предложена конструкция управляемого электромеханического привода сцепления, позволяющая существенно упростить и облегчить управление автомобилем, которая защищена патентами Российской Федерации на полезную модель.
5. Разработан экспериментальный сгенд, оснащенный управляемым электромеханическим приводом сцепления, а также программное обеспечение на основе ПИД регулирования с учетом информации поступающей с датчиков позволяющие исследовать различные режимы работы сцепления автомобиля.
6 Проведены экспериментальные исследования динамики управляемого электромеханического привода сцепления, что позволило выработать рекомендации по проектированию и применению устройств данною вида
Основное содержание диссертационной работы изложено в следующих публикациях:
Публикации в изданиях, рекомендованных ВАК Российской Федерации:
1 Яцун, С Ф Исследование работы автомобильного сцепления с автоматическим приводом при постоянной нагрузке / С Ф Яцун, И П Емельянов // Известия ТулГУ Серия Вычислительная техника Информационные технологии Системы управления Вьш 3 Системы управления Том 2 — Тула Изд-во ТулГУ, 2006 — С 297-301
Статьи, материалы конференций и другие публикации:
2 Емельянов, И П. Анализ динамики фрикционного сцепления при трогании автомобиля с места / И.П. Емельянов // Вибрационные машины и технологии в 2 ч 4 2 сб науч тр — Курск Курск гос техн ун-т, 2005 -С 99-102
Анализ динамики фрикционного сцепления при трогании автомобиля с места / И.П. Емельянов // Вибрационные машины и технологии в 2 ч 4 2 сб науч тр — Курск Курск гос техн ун-т, 2005 -С 99-102
3 Яцун, С Ф Экспериментальный стенд для исследования динамики автомобильного сцепления и его привода / С Ф Яцун, И П Емельянов // Известия Курского государственного технического университета — Курск Курск гос техн ун-т, 2006 -№2(17) — С 20-23
4 Яцун, С Ф Оптимальные способы автоматического управления автомобильным сцеплением с применением микроэлектроники / С Ф Яцун, И.П Емельянов // Современные инструментальные системы, информационные технологии и инновации материалы IV Международной научно-технической конференции в 2 ч Ч 1 — Курск1 Курск гос техн ун-т, 2006 — С 39-41
5 Емельянов, И П Применение оптических датчиков в автоматизированном приводе сцепления автомобиля / И П Емельянов, Д Ю Шо-ренков // Современные инструментальные системы, информационные технологии и инновации материалы IV Международной научно-технической конференции в2ч Ч 2 -Курск Курск гос техн. ун-т,2006 -С 143-146
ун-т,2006 -С 143-146
6 Яцун, СФ Автоматизированный привод сцепления автомобиля / С Ф Яцун, И П Емельянов // Проблемы создания и совершенствования строительных и дорожных машин Сб докл. Междунар науч -практич. Интернет-конф — Белгород, изд-во БГТУ им В Г Шухова, 2006 — С 90-91.
7 Яцун, С Ф Динамический анализ трансмиссии автомобиля / С Ф Яцун, И П Емельянов // Образование, наука, производство и управление Сборник трудов международной научно-практической конференции. В 4-х т. -Старый Оскол ООО «ТНТ», 2006 — Т 4. — С 521-524
8 Емельянов, ИII Моделирование динамики автоматизированного привода сцепления автомобиля / И П Емельянов // Актуальные проблемы динамики и прочности материалов и конструкций модели, методы, решения
f
материалы международной научно-технической конференции (1-3 июня 2007г, г Самара) -Орел ОрелГТУ, 2007.- С 128-130
9 Патент на полезную модель 53232 Российская Федерация, МПК7 В 60 К 23/02 Устройство для управления сцеплением транспортного средства / Яцун С Ф, Емельянов И П , заявитель и патентообладатель Курск гос техн ун-т. — №2005139490; заявл. 16 12 2005, опубл 10 05 2006, Бюл №13
— №2005139490; заявл. 16 12 2005, опубл 10 05 2006, Бюл №13
10 Патент на полезную модель 58478 Российская Федерация, МПК7 В 60 W 10/02 Автоматизированное устройство для управления сцеплением транспортного средства / Яцун С Ф, Емельянов И П, заявитель и патентообладатель Курск гос техн ун-т -№2006127147/22, заявл. 26.07 2006, опубл 27 11 2006, Бюл №33
11 Патент на полезную модель 64159 Российская Федерация, МПК7 В 60 W 10/02 Автоматическая система управления сцеплением транспортного средства / Яцун С Ф , Емельянов И П, заявитель и патентообладатель Курск гос техн ун-т — №2007100283/22, заявл 09 01 2007, опубл 27.06 2007, Бюл №18.
12 Свидетельство об официальной регистрации программы для ЭВМ Программа для управления мехатронными системами / Яцун С Ф, Емельянов И П , Деменюк А А — №2007614118, заявл 25 06 2007, зарегистрировано 26 09 2007
ИД №06430 от 10 12 01 Подписано в печать 05 10 2007. Формат 60×48 1/16
Печатных листов 1.0 Тираж 100 экз заказ 458 Курский государственный технический университет Издательско-полиграфический центр Курского государственного технического университета 305040, Курск, ул 50 лет Октября, 94
Вестингауз Хоббс Форд Кортина Декабрь 1963
Мы написали так много слов о механической трансмиссии Хоббса, что читатели могут заподозрить нашу необъективность. В данном конкретном случае да, потому что эта автоматическая коробка передач, к нашему удовлетворению, оказалась лучшей безмуфтовой коробкой передач, которую мы использовали. Вы можете резонно спросить: «Если это так хорошо, почему производитель не подходит?» Хороший вопрос, на который ни мы, ни господа Хоббс не можем полностью ответить, поскольку производители двигателей редко раскрывают причины, по которым они не выбирают элементы собственного оборудования, и, конечно, нет никаких реальных причин, по которым они должны это делать. Возможно, вы помните, что Borgward приобрел коробку Hobbs для Borgward Isabella под именем Hansamatic, но их банкротство произошло до того, как Hobbs начал серьезное производство.
В данном конкретном случае да, потому что эта автоматическая коробка передач, к нашему удовлетворению, оказалась лучшей безмуфтовой коробкой передач, которую мы использовали. Вы можете резонно спросить: «Если это так хорошо, почему производитель не подходит?» Хороший вопрос, на который ни мы, ни господа Хоббс не можем полностью ответить, поскольку производители двигателей редко раскрывают причины, по которым они не выбирают элементы собственного оборудования, и, конечно, нет никаких реальных причин, по которым они должны это делать. Возможно, вы помните, что Borgward приобрел коробку Hobbs для Borgward Isabella под именем Hansamatic, но их банкротство произошло до того, как Hobbs начал серьезное производство.
Многие другие производители тестировали Mecha-Matic на многих автомобилях, но в целом они отвергли его. Наиболее известными из них были Ford of Dagenham, которые в последние годы тестировали трансмиссию на многих автомобилях. Их инженеры одобрили трансмиссию, и она должна была быть указана в качестве дополнительного оборудования для Classic, Capri и Cortina, а затем и для Corsair.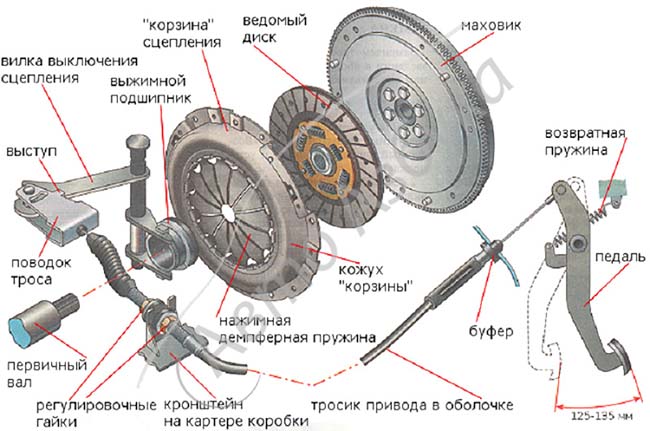 Фактически, прессованные полы вокруг туннеля коробки передач были модифицированы, чтобы принять коробку Хоббса, предполагаемая стоимость которой составляет 80 000 фунтов стерлингов. Форд сказал Хоббсу, что им придется производить в действительно больших количествах (500 штук в день), намного превышающих мощность их завода в Лимингтон-Спа, но поскольку Хоббс недавно продал 50% акций крупной компании Westinghouse Company, которая готовился построить большой новый завод в Манчестере, там не было проблем. Завод был должным образом завершен, и для Ford была изготовлена партия серийных коробок передач. К сожалению, из-за того, что некоторые операторы не оценили тонкие допуски, необходимые для правильной работы коробки, они были не очень хорошими. Хоббс быстро все наладил, и серийные редукторы вскоре стали соответствовать стандарту прототипов ручной сборки. Однако Форд решил не продолжать работу над коробкой Хоббса, и у Вестингауза осталась большая фабрика, которая вообще ничего не производила.
Фактически, прессованные полы вокруг туннеля коробки передач были модифицированы, чтобы принять коробку Хоббса, предполагаемая стоимость которой составляет 80 000 фунтов стерлингов. Форд сказал Хоббсу, что им придется производить в действительно больших количествах (500 штук в день), намного превышающих мощность их завода в Лимингтон-Спа, но поскольку Хоббс недавно продал 50% акций крупной компании Westinghouse Company, которая готовился построить большой новый завод в Манчестере, там не было проблем. Завод был должным образом завершен, и для Ford была изготовлена партия серийных коробок передач. К сожалению, из-за того, что некоторые операторы не оценили тонкие допуски, необходимые для правильной работы коробки, они были не очень хорошими. Хоббс быстро все наладил, и серийные редукторы вскоре стали соответствовать стандарту прототипов ручной сборки. Однако Форд решил не продолжать работу над коробкой Хоббса, и у Вестингауза осталась большая фабрика, которая вообще ничего не производила.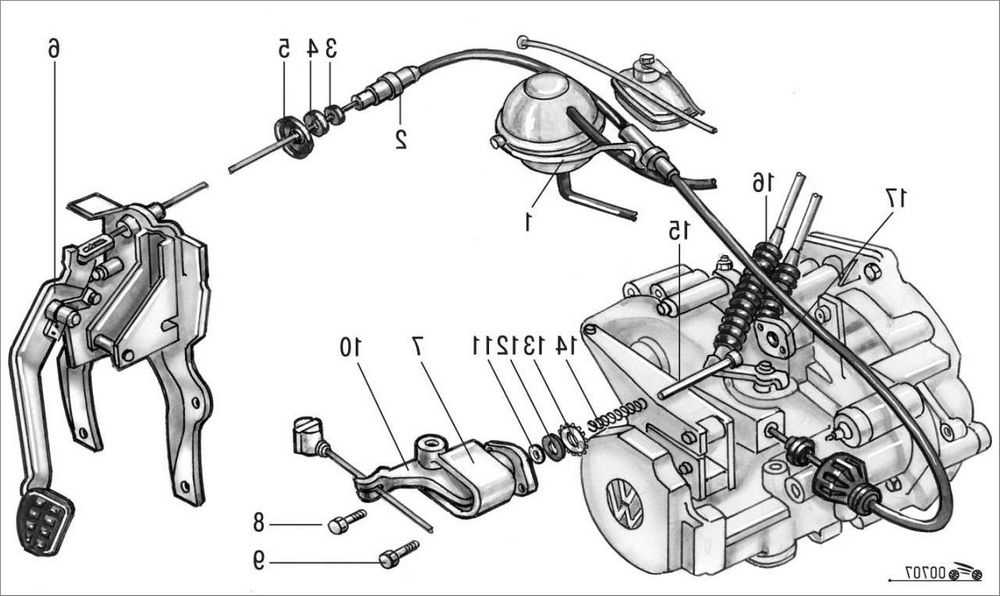
С тех пор многие другие производители, в основном качественные производители Continental, такие как Volvo, Saab, Lancia и B.M.W., протестировали коробку, и хотя они одобряют ее и в большинстве случаев в восторге от нее, все они сдерживаются, главным образом, исходя из предположения, что если гигантская империя Форда отказалась от него, должно быть, есть загвоздка с трансмиссией, которую они еще не обнаружили.
Другие проекты, находящиеся в стадии реализации Hobbs, включают переднеприводную автоматическую установку, которая интересна Ford of Cologne своей моделью Taunus 12M, в то время как другие переднеприводные автомобили приверженцы, такие как Lancia, Saab и Renault, очень заинтересованы. К сожалению, эту компоновку нельзя было адаптировать для B.M.C. диапазон переднеприводных автомобилей, потому что их коробка передач находится в поддоне. В любом случае B.M.C. проявили небольшой интерес.
В любом случае B.M.C. проявили небольшой интерес.
Коробка передач, способная выдерживать крутящий момент мощных двигателей большой мощности, находится на очень продвинутой стадии, и это вполне может понравиться производителям больших автомобилей или создателям гоночных автомобилей, водители которых достаточно заняты, контролируя всю эту мощность, не имея заморачиваться с нажатием на педаль сцепления. Колин Чепмен тестировал пятиступенчатую версию коробки Hobbs с целью использования ее в Lotus 25, но пока решение не принято.
В настоящее время производителям доступны две версии этой трансмиссии: 1015 для автомобилей с объемом двигателя до 1,5 литра и 1523 для автомобилей с объемом двигателя от 1,5 до 2,5 литров. Вскоре к ним присоединится более крупная модель, обеспечивающая полный охват диапазона производительности.
Конечно, Хоббс и Вестингауз не могут вечно жить за счет создания прототипов, и хотя у них обоих есть другие промышленные контракты, они сочли необходимым начать поставки трансмиссии для широкой публики. Очевидный выход был найден в моделях линейки Ford, которые уже были модифицированы для установки трансмиссии 1015, и теперь она предлагается в качестве модификации по поразительно низкой цене в 85 фунтов стерлингов. В настоящее время это предлагается только для новых автомобилей, так что только Capri, Cortina и Corsair могут быть модифицированы, но может случиться так, что, если спрос будет достаточно большим, Хоббса можно будет убедить выполнить работу на подержанных автомобилях, что позволит Classic быть модифицированы, а также существующие Capris, Cortinas и Corsairs.
Очевидный выход был найден в моделях линейки Ford, которые уже были модифицированы для установки трансмиссии 1015, и теперь она предлагается в качестве модификации по поразительно низкой цене в 85 фунтов стерлингов. В настоящее время это предлагается только для новых автомобилей, так что только Capri, Cortina и Corsair могут быть модифицированы, но может случиться так, что, если спрос будет достаточно большим, Хоббса можно будет убедить выполнить работу на подержанных автомобилях, что позволит Classic быть модифицированы, а также существующие Capris, Cortinas и Corsairs.
Westinghouse-Hobbs не работает напрямую с покупателями, но назначает основных дилеров Ford для продажи трансмиссии. На данный момент назначено 35 дилеров, у каждого из которых есть демонстрационный автомобиль и механик, прошедший обучение в заводской школе обслуживания. Инженеры Factory Field Service также доступны для владельцев. Когда клиент заказывает Ford, оснащенный коробкой Hobbs, дилер отправляет заказ Fords, которые затем отправляют готовый автомобиль с нужной спецификацией на завод Westinghouse в Манчестере транспортной компанией.
Единственным заметным отличием от обычной Cortina является то, что центральное переключение передач имеет дистанционное управление, подобное тому, что используется на GT Cortina, а отверстие, из которого вырастает рычаг, закрыто круглой заплатой с логотипом Westinghouse- Знак отличия Хоббса. Схема переключения идентична той, что используется в Lotus Elite Дэвида Хоббса (см. 19 декабря).62 выпуск), рычаг перемещается в продольной плоскости по шести положениям, отмеченным на ручке переключения передач. Самый дальний вперед — это задний ход, затем рычаг последовательно тянут назад для нейтрального, первого, второго, третьего и верхнего положения, что также является полностью автоматическим положением. У тестового автомобиля также было положение парковки, которое активируется нажатием рычага вправо в нейтральном положении, но серийные коробки передач не оснащены парковочной собачкой, поскольку это не считается необходимым на легких автомобилях Ford.
Схема переключения идентична той, что используется в Lotus Elite Дэвида Хоббса (см. 19 декабря).62 выпуск), рычаг перемещается в продольной плоскости по шести положениям, отмеченным на ручке переключения передач. Самый дальний вперед — это задний ход, затем рычаг последовательно тянут назад для нейтрального, первого, второго, третьего и верхнего положения, что также является полностью автоматическим положением. У тестового автомобиля также было положение парковки, которое активируется нажатием рычага вправо в нейтральном положении, но серийные коробки передач не оснащены парковочной собачкой, поскольку это не считается необходимым на легких автомобилях Ford.
Автомобиль можно запустить только на нейтральной передаче, после чего рычаг можно потянуть назад в любое из положений передней передачи или поднять вперед для передачи заднего хода. Некоторая ползучесть была замечена при прогреве с воздушной заслонкой, но как только автомобиль достиг нормальной рабочей температуры, автомобиль оставался совершенно неподвижным на любой передаче. Для полностью автоматической работы рычаг можно оставить в положении высшей передачи, и переключение передач произойдет само собой. Кое-кто из наших сотрудников считал, что коробка Хоббса ничем не лучше гидротрансформаторных типов при использовании в полностью автоматическом режиме, но, конечно, у водителя по-прежнему четыре передачи против трех существующих гидравлических типов, при этом коробка потребляет гораздо меньше мощности, так что ускорение почти не влияет, а расход топлива лишь незначительно хуже. Фактически, при некоторых условиях Hobbs Cortina может быть более экономичным, чем его аналог с ручным переключением.
Для полностью автоматической работы рычаг можно оставить в положении высшей передачи, и переключение передач произойдет само собой. Кое-кто из наших сотрудников считал, что коробка Хоббса ничем не лучше гидротрансформаторных типов при использовании в полностью автоматическом режиме, но, конечно, у водителя по-прежнему четыре передачи против трех существующих гидравлических типов, при этом коробка потребляет гораздо меньше мощности, так что ускорение почти не влияет, а расход топлива лишь незначительно хуже. Фактически, при некоторых условиях Hobbs Cortina может быть более экономичным, чем его аналог с ручным переключением.
При полностью открытой дроссельной заслонке в автоматическом режиме переключение на более высокие передачи происходит на скорости 19, 33 и 59 миль в час. а при меньшем открытии дроссельной заслонки изменения происходят на подходящих скоростях. Установлен переключатель Kick-Down, и Kick-Down работает на всех передачах, что не характерно для автоматических коробок передач. Это имеет свои недостатки, особенно при интенсивном движении, поскольку, если водитель медленно трогается с места, а коробка переключается на вторую, когда водитель дает полный газ, коробка переключается на первую с сильным рывком. Вскоре научаешься этого не делать, и в любом случае можно выбрать первую передачу для использования в условиях интенсивного движения, чтобы не происходило никаких переключений. Единственные другие критические замечания, которые можно было бы сделать о коробке в ее полностью автоматической форме, — это рывки, возникающие при переключении вверх при определенных открытиях дроссельной заслонки, и вялое включение высшей передачи. С первой легко жить, и ее можно свести к минимуму с опытом, в то время как вторая неисправность оказалась характерной для нашего тестового автомобиля и может быть устранена. Позже мы убедились в этом, управляя Corsair, у которого было очень плавное и быстрое включение высшей передачи. В автоматическом режиме есть некоторое торможение двигателем, что является полезной функцией, но даже коробка Hobbs не может устранить эту проблему с автоматическим переключением в неподходящий момент, так что, когда вы резко ускоряетесь на третьей и хотите сбросить скорость из-за трафика или для изгиба он превратится в вершину.
Это имеет свои недостатки, особенно при интенсивном движении, поскольку, если водитель медленно трогается с места, а коробка переключается на вторую, когда водитель дает полный газ, коробка переключается на первую с сильным рывком. Вскоре научаешься этого не делать, и в любом случае можно выбрать первую передачу для использования в условиях интенсивного движения, чтобы не происходило никаких переключений. Единственные другие критические замечания, которые можно было бы сделать о коробке в ее полностью автоматической форме, — это рывки, возникающие при переключении вверх при определенных открытиях дроссельной заслонки, и вялое включение высшей передачи. С первой легко жить, и ее можно свести к минимуму с опытом, в то время как вторая неисправность оказалась характерной для нашего тестового автомобиля и может быть устранена. Позже мы убедились в этом, управляя Corsair, у которого было очень плавное и быстрое включение высшей передачи. В автоматическом режиме есть некоторое торможение двигателем, что является полезной функцией, но даже коробка Hobbs не может устранить эту проблему с автоматическим переключением в неподходящий момент, так что, когда вы резко ускоряетесь на третьей и хотите сбросить скорость из-за трафика или для изгиба он превратится в вершину. К счастью, коробка Hobbs снабжена средствами, позволяющими водителю самостоятельно выбирать передачу, что, вероятно, является ее главной привлекательностью, когда речь идет о увлеченных водителях. Все, что нужно, это нажать на рычаг в нужное положение, и коробка подберет его за вас. Если вы едете на высшей передаче и хотите перейти на первую передачу, рычаг переключается вперед в положение первой передачи, и автомобиль будет постепенно замедляться и переключаться на пониженную передачу до тех пор, пока не будет достигнута первая передача без чрезмерного увеличения оборотов или каких-либо других драматичных действий. Задний ход можно включить при движении вперед со скоростью менее 5 миль в час. но если он включается во время движения на высокой скорости, коробка просто выбирает нейтраль. Любая из непрямых передач может быть выбрана таким образом, и если оставить ее там, коробка выберет более низкие передачи, если скорость упадет ниже полезного диапазона этой передачи, но не выберет более высокую передачу.
К счастью, коробка Hobbs снабжена средствами, позволяющими водителю самостоятельно выбирать передачу, что, вероятно, является ее главной привлекательностью, когда речь идет о увлеченных водителях. Все, что нужно, это нажать на рычаг в нужное положение, и коробка подберет его за вас. Если вы едете на высшей передаче и хотите перейти на первую передачу, рычаг переключается вперед в положение первой передачи, и автомобиль будет постепенно замедляться и переключаться на пониженную передачу до тех пор, пока не будет достигнута первая передача без чрезмерного увеличения оборотов или каких-либо других драматичных действий. Задний ход можно включить при движении вперед со скоростью менее 5 миль в час. но если он включается во время движения на высокой скорости, коробка просто выбирает нейтраль. Любая из непрямых передач может быть выбрана таким образом, и если оставить ее там, коробка выберет более низкие передачи, если скорость упадет ниже полезного диапазона этой передачи, но не выберет более высокую передачу.
Используя рычаг переключения передач для переключения вверх, водитель может удерживать двигатель на максимальных оборотах, если это необходимо, но, как мы обнаружили при измерении показателей производительности, это приводит лишь к незначительному улучшению ускорения и, очевидно, не стоит усилий, если не требуется абсолютная максимальная производительность. Изменения становятся наиболее плавными, когда применяется большое количество газа, и лучше вообще не поднимать ногу при переходе на более высокие передачи для абсолютной плавности.
Главная радость от вождения Mecha-Matic заключается в том, что передачи можно выбирать по желанию, так что езда по извилистым дорогам становится удовольствием, а не чистилищем, как это бывает со средней автоматической коробкой передач с гидротрансформатором. Изменения можно вносить гораздо быстрее, чем с механической коробкой передач, и водитель может полностью сосредоточиться на рулевом управлении и торможении. К сожалению, в своей стандартной форме Cortina — это не тот автомобиль, который хочется разбрасывать, но Lotus-Cortina или обычная модель с соответствующим образом модифицированной подвеской станет намного более приятной благодаря установке трансмиссии Hobbs. Он также имеет преимущество несколько лучших передаточных чисел, чем довольно широко разнесенные передаточные числа механической коробки передач Ford.
Он также имеет преимущество несколько лучших передаточных чисел, чем довольно широко разнесенные передаточные числа механической коробки передач Ford.
В какой-то степени жаль, что Mecha-Matic доступен только для Ford, так как их коробка передач, по крайней мере, приятна в использовании, и мы могли бы придумать множество других автомобилей, на которых она была бы более подходящей. Впрочем, это может прийти со временем. А пока мы можем полностью рекомендовать коробку передач Westinghouse-Hobbs владельцам Ford. Полную информацию можно получить у основных дилеров Ford или Westinghouse Hobbs Ltd., Walkden, Nr. Манчестер.—М. L. T
Показатели производительности
Скорость – полностью автоматическая – ручная смена – Cortina GT
0-30 миль/ч – 5,2 сек. – 5,1 сек. – 3,8 сек.
0-40 – 8,5 – 8,1 – 6,4
0-50 – 13,1 – 12,7 – 10,4
0-60 – 20,0 – 19,1 – 14,0
0-70 – 32,0 – 31,8 – 19,0
Старт с места – 1/4 мили . – 21,2 сек. – (не взято)
Скорости на передачах
Первая – 19 м/ч. — 28 миль в час — 30 миль в час
— 28 миль в час — 30 миль в час
Второй — 33 — 43 — 44
Третий — 59 — 66 — 76
(Примечание: — Мы не тестировали обычную Cortina 1500, поэтому в последнем столбце мы приводим цифры, полученные на GT Cortina, протестированном 19 июля.63, в котором указано, что эта модель начинает уходить от Mecha-Matic 1500 только на скорости более 50 миль в час)
Иллюстрация
Все передаточные числа переднего и заднего хода в автоматической коробке передач Westinghouse Hobbs получены из составного планетарного редуктора. поезд, и, следовательно, все зубчатые передачи находятся в постоянном зацеплении. Главный фрикцион обеспечивает полностью автоматическое включение привода с места, а непрямые передаточные числа включаются просто за счет применения гидравлических «дисковых» тормозов, воздействующих на части зубчатой передачи, в то время как для высшей передачи включается вторичное сцепление. который блокирует зубчатую передачу для обеспечения прямого привода.