что это, в чем разница, главные отличия
Положение в пространстве, направление движения и ускорение — наверное одни из тех факторов, которые попросту нужно знать логической части множества контролирующих устройств. Речь идет не только о специфичной самолетной, вертолетной или морской технике, изменение ориентации которой важно в навигации и пилотировании.
Применяются датчики определяющие перечисленные факторы и в быту. К примеру, в смартфонах, фитнес-браслетах, планшетах, ноутбуках, экранах TV или мониторах. Для первых трех — технология положения используется в нише создания шагомеров или в качестве управляющей функциями аппарата опции. Доступно и позиционирование с участием детектора отображаемых элементов мобильного устройства. Остальные перечисленные, довольствуются определением текущей ориентации выводящего изображение экрана. В случае ее изменения, соответственно будет подстроен и формат — книжный (широкий) или альбомный (узкий) тип подачи картинки на текущий дисплей.![]()
Есть еще одна ниша в быту, где властвуют аппараты, определяющие ускорение и положение в пространстве. Речь идет об игровых контроллерах, которые, на современных приставках, осуществляют действие не только от нажатия на кнопку, но и по вибрации джойстика или его наклона.
Встречаются акселерометры и в автомобильных регистраторах. Они включают запись событий в моменты резких остановок, экстренного торможения или изменения положения кузова. Последнее актуально для тех случаев, когда машина вылетает с дороги, обо что-то ударяется, а также переворачивается на бок или крышу.
В любом варианте использования, для аппаратов, определяющих положение, применяют два вида сенсоров — акселерометр или гироскоп. Каждый из которых, обладает своими плюсами и минусами. В настоящее время, сама механика каждого из перечисленных датчиков, упакована внутрь небольших микросхем. Хотя, в своей основе, — принцип их действия остается неизменным еще с XIX века. Именно тогда, давно известные физические свойства, относящиеся к механизмам, определяющим положение в пространстве, получили свое официальное наименование.
Редко, но встречаются случаи, участия обоих типов сенсоров — гироскопа и акселерометра в схеме одного устройства. Чаще используется какой-либо один из них, так как он, почти в полном объеме, выполняет функции другого. Хотя есть и небольшие различия, делающие применение аналогичного по возможностям датчика, но работающего на других физических основах, — в некоторых случаях невозможным.
Гироскоп
Изобретение устройства приписывается Иоанну Бонненбергеру, как первому человеку, описавшему механический гироскоп. Но, еще задолго до него, люди обращали внимание на поведение обычного волчка (юлы) — вращаясь, он всегда сохраняет одно положение, вне зависимости от действия сторонних сил. То есть, единовременный наклон плоскости, на которой находится крутящийся маховик не оказывает на его положение никакого влияния. В основе работы механического гироскопа заложен тот же принцип. Ротор, закреплен в корпусе на две подвижные рамы, позволяющие изменять его положение в пространстве по всем осям ординат.
Чем выше оборот маховика и его вес, тем более устойчив гироскоп к внешним факторам изменения положения. С другой стороны, тем больше его размер. Современные устройства настоящего типа миниатюрны и представляют собой относительно небольшую микросхему с гранями менее сантиметра длинной. Наклон в таких приборах выявляется уже не положением маховика в подвижной раме, а местонахождением миниатюрного вибрирующего грузика по трем осям. Описанная система более надежна, чем ее классический вариант. Кроме того, результирующий чувствительный прибор очень мал. Впервые, для рынка мобильных устройств, гироскоп в составе МЭМС микросхемы стал доступен в смартфоне Apple iPhone 4s.
Акселерометр
Изначальным датчиком, определяющим положение в пространстве для устройств, был акселерометр, еще называемый G-сенсором.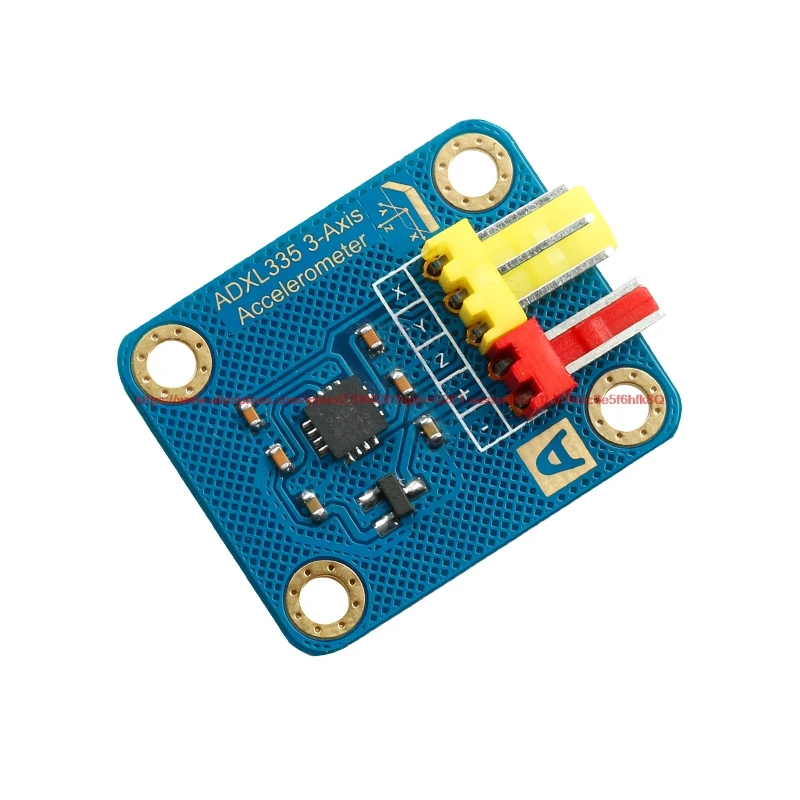 В состоянии покоя, он позволяет приблизительно, вычислить угол наклона детектора относительно вектора силы тяготения земли. Но основная функция устройства — определение ускорения движения.
В состоянии покоя, он позволяет приблизительно, вычислить угол наклона детектора относительно вектора силы тяготения земли. Но основная функция устройства — определение ускорения движения.
В своей конструкции, акселерометр представлен грузом, закрепленным на подвижном основании и установленным вдоль пути возможного перемещения. При ускорении маятник будет смещаться на расстояние, зависящее от силы воздействия.
Практическое применение прибора с одним определяемым вектором направления — бессмысленно. Обычно используют датчики акселерометров с тремя линиями чувствительности воздействия, упакованные, как, и в случае гироскопов внутрь МЭСМ микросхем.
Рассматривая детектор со стороны внутренних электрических принципов работы, можно заметить, что чаще встречаются сенсоры ускорения емкостного или пьезоэлектрического действия.
Недостатки и преимущества
Гироскоп и акселерометр похожи по возможностям, тем не менее, отличаются определяемой характеристикой. В первом случае — положение, для второго — направление воздействия силы. Поэтому функциональность их востребована немного в разных жизненных областях. Рассмотрим их возможности, в разрезе плюсов и минусов.
В первом случае — положение, для второго — направление воздействия силы. Поэтому функциональность их востребована немного в разных жизненных областях. Рассмотрим их возможности, в разрезе плюсов и минусов.
Акселерометр
Плюсы:
- Быстрое определение изменения действия вектора силы. Хорош в качестве датчика ускорения.
- Проще конструктивно и дешевле гироскопа.
Минусы:
- Положение относительно земли определяет неточно. Сильно зависит от воздействия гравитации. Дает показания, требующие введения коэффициента поправки в зависимости от текущего места и воздействия внешних факторов.
- Чувствителен к сторонней вибрации.
- Не может производить измерение угла наклона при ускорении. Требует для получения данных момент покоя.
Наиболее часто используется в обыденной жизни для автомобильных регистраторов, систем безопасности хрупкого оборудования, мобильных телефонов и планшетов, игровых контроллеров, фитнес-браслетов. Популярен за счет низкой цены, малого размера и надежности.
Популярен за счет низкой цены, малого размера и надежности.
Гироскоп
Плюсы:
- Точен в определении углов наклона по всем трем осям XYZ, или как их еще называют — крена, тангажа и рысканья.
- Нулевое направление, от которого и выполняются измерения, не зависит от притяжения земли и может быть любым.
- Практически не подвержен влиянию внешних факторов или сторонних сил. К примеру, работа устройства полностью, или по большей части, игнорирует вектор и состояние окружающего магнитного поля.
Минусы:
- Не может определять ускорение.
- Сложность конструкции увеличивает конечную стоимость устройства.
- Время определения смены положения выше, чем в случае акселерометра.
Для гироскопов характерной нишей применения становятся системы равновесия транспортных средств, включая водные, воздушные и космические. Ими же оснащают качественные мобильные аппараты и всю электронику контролирующую изначальное положение в пространстве механизмов или производственных линий.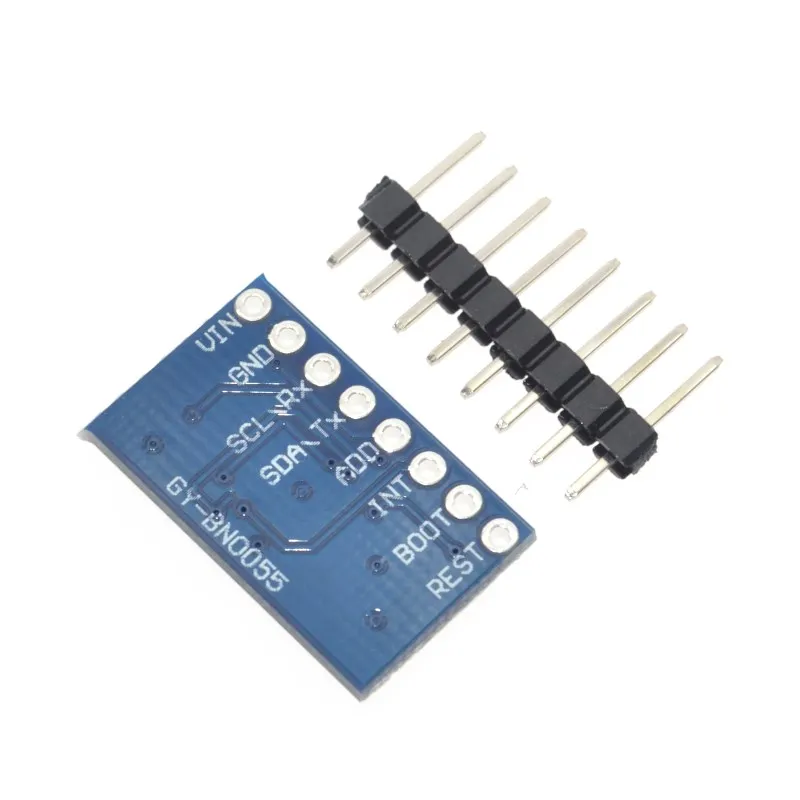
Как определить установленный тип датчика для мобильного устройства
В смартфоне или планшете определить, какой именно сенсор установлен — гироскоп или акселерометр очень просто, даже без использования специфичных программ. Достаточно включить «поворот экрана» и потрясти устройство вверх-вниз, влево-вправо, не переворачивая его в действительности. Если экран сменит ориентацию, значит детектором выступает акселерометр. Если нет — гироскоп. Все дело именно в отличии определяемых сил. Если ускорение без покоя в случае акселерометра – процессор устройства «решит», что произошел поворот. Гироскопу тряска безразлична.
Точно помогут определить вид детектора и его модель специальные программы. К примеру, Sensor Box For Android, AnTuTu Benchmark, AIDA64.
Использование акселерометра или гироскопа с микроконтроллерами
Отдельно стоит упомянуть датчики положения, используемые в DIY- проектах. Речь идет об их вариантах, разработанных для совместного использования с Arduino или Raspberry PI.
С помощью подобных сенсоров и контролера можно определять текущее положение роботов или подвижной техники в пространстве. Доступно и вычисление текущей скорости. Для чего берется за основу импульсы изначального ускорения и характеристики торможения. Далее математически вычисляется текущее значение параметра. Причем крайний вариант применения не требует установки механической связи с подвижными частями подвески аппарата. В некоторых случаях, настоящее действие может быть затруднено к исполнению.
Резюмируя
Датчики положения для техники делятся на акселерометры и гироскопы. Первые определяют ускорение, воздействующее на сенсор, вторые его угол наклона в пространстве. Акселерометры можно использовать и в качестве гироскопа, вычисляя текущий поворот детектора относительно вектора земного притяжения. К сожалению, точность настоящих измерений будет низкой и сильно зависеть от сторонних факторов. Включая то, что для определения текущего положения датчика ускорения — под углом, стоя или лежа, требуется чтобы он находился в состоянии покоя.
Видео по теме
Акселерометры Analog Devices – устройство и применение — Компоненты и технологии
В статье рассказывается об устройстве и применении интегральных акселерометров компании Analog Devices, приводится также информация о линейке датчиков с учетом самых недавних обновлений.
Введение
Акселерометры реагируют на ускорение или силу, действующую на сенсорный элемент датчика. Ускорение, статическое или динамическое, возникает под действием силы, ускоряющей датчик, например, вследствие действия гравитации. Следовательно, акселерометры могут применяться для измерения силы, ускорения, вибрации, движения или перемещения, а также положения и угла наклона (инклинометры). Линейка однокристальных интегральных акселерометров компании Analog Devices Inc. (ADI), выполненных по технологии
Высокие рабочие характеристики, малое энергопотребление, интегрированная функциональность обработки сигнала, возможность калибровки и программирования, миниатюрность, низкая цена — все это делает акселерометры ADI чрезвычайно привлекательными для разработчиков, «закладывающих» эти устройства в новые изделия. Так, согласно самой последней информации, уже 250 млн. единиц акселерометров ADI продано к настоящему времени на различные рынки, включая автомобильный, компьютерный, промышленный. Продукция ADI уже достаточно хорошо известна специалистам, но, благодаря маркетинговой стратегии компании, многочисленные линейки датчиков и прочих интегральных устройств непрерывно обновляются, ориентируясь на новые целевые рынки, поэтому о них всегда можно прочитать что-то новое. Об акселерометрах ADI написано уже достаточно много статей, но чтобы специалистам, впервые применяющим датчики этого типа в своем проекте, не пришлось перерывать горы журналов прошлых лет, автор попытался всю необходимую информацию в сжатой форме отразить в одной статье.
Технология iMEMS
Технология iMEMS (integrated MEMS) от Analog Devices представляет собой разновидность технологии MEMS (Micro Electro Mechanical Systems), позволяющую совмещать на одном кристалле микроэлектромеханические устройства с традиционными электронными элементами интегральных схем.
Технология получения поверхностной микромеханической измерительной структуры интегрального датчика проиллюстрирована рис. 1.
На специально отведенный участок кристалла наносится диоксид кремния (так называемый «жертвенный» слой), проводится литография, вскрываются «окна» для подсоединения микромеханического сенсора к электрической схеме и одновременного получения «якорей», удерживающих конструкцию сенсорной части датчика на кремниевой подложке. Далее сверху наращивается слой поликристаллического кремния, затем посредством литографии и травления поликремния создается сенсорная структура. Наконец, травится «жертвенный» слой, и механическая часть датчика готова (рис. 1б).
1б).
В результате механическая часть датчика включает поликремниевую пластинку, механически соединенную с подложкой при помощи упругих элементов подвеса, удерживаемых «якорями», способную перемещаться в направлении одной степени свободы под действием ускорения. По краям пластинки вытравлены балки, закрепленные на подложке и образующие дифференциальную систему большого числа ячеек парных емкостей. Перемещение подвижной пластинки относительно этих неподвижных балок позволяет регистрировать ускорение (рис. 2). В отсутствие ускорения емкости в ячейке почти одинаковы, если же ускорение отлично от нуля, пластинка смещается, и баланс емкостей нарушается. Кроме того, возможно наличие дополнительных балочных структур, используемых для смещения механики сенсора внешним напряжением — для проверки функциональности датчика или так называемого самотестирования. На рис. 3 показан совмещенный вариант двухосевого датчика, обеспечивающий чувствительность к ускорениям в двух направлениях, отдельно приведено увеличенное изображение упругой подвески, выполненной для увеличения чувствительности в форме меандра.
Рис. 2. Дифференциальная измерительная система на основе парных емкостей с балками, закрепленными на подложке
Рис. 3. Оптическое изображение сенсорной части двухосевого акселерометра
Принцип работы датчика
При воздействии на подвижный элемент сенсора массой mсилы F = ma возникает смещение x, пропорциональное ускорению:
где β — жесткость подвески, a — ускорение смещения сенсора, ω0 — собственная частота колебаний сенсора, определяющая чувствительность механической части системы.
На балки, зафиксированные на подложке, подаются электрические сигналы — прямоугольные импульсы различной полярности в противофазе (рис. 4). При отсутствии ускорения смещение механики отсутствует и емкости равны, поэтому выходной сигнал переменного напряжения, снимаемый с подвижной пластины, также практически равен нулю (всегда присутствует малое ненулевое смещение). При наличии ускорения баланс емкостей нарушается, и появляется переменный сигнал.![]()
Рис. 4. Схема обработки сигнала датчика
При малых смещениях подвижной части электрический сигнал пропорционален величине смещения, которое, в свою очередь, пропорционально ускорению. В акселерометрах ADI полученный сигнал, как правило, детектируется в схеме синхронного демодулятора и усиливается. Необходимо учитывать, что при подаче напряжения между балками возникают электростатические силы, которые тем больше, чем больше разбаланс емкостей. Поэтому для предотвращения нежелательного возбуждения сенсора и уменьшения шумов частота электрического сигнала, подаваемого на емкости, выбирается существенно больше собственной частоты колебаний сенсора.
Типичное значение резонансной частоты акселерометра редко превышает 10 кГц, частоты подаваемого сигнала — 100 кГц. Выходным сигналом преобразователя после соответствующей обработки сигнала с сенсорной части является напряжение, линейно связанное с величиной ускорения или сигнал широтно-импульсной модуляции (ШИМ), при котором ускорение также пропорционально отношению длительности импульса к периоду последовательности.![]() В линейке интеллектуальных датчиков семейства ADIS существуют также варианты с цифровым выходным сигналом, передаваемым по последовательному SPI-интерфейсу.
В линейке интеллектуальных датчиков семейства ADIS существуют также варианты с цифровым выходным сигналом, передаваемым по последовательному SPI-интерфейсу.
Применение акселерометров
Области применения акселерометров определяются их основными параметрами, а также их соотношением. Важнейшими параметрами акселерометра являются диапазон измеряемых ускорений, чувствительность, выражаемая обычно как отношение сигнала в вольтах к ускорению, нелинейность в процентах от полной шкалы, шумы, температурные дрейфы нуля (смещения) и чувствительности.
В ряде случаев существенной характеристикой оказывается собственная частота колебаний сенсора ω0 или резонансная частота ƒ0, определяющая рабочую полосу частот датчика. В большинстве применений важны температурный диапазон и максимально допустимые перегрузки — характеристики, связанные с условиями эксплуатации датчиков.
Определяющими параметрами, влияющими на точность определения ускорения, являются дрейфы нуля и чувствительности (в основном температурный), а также шумы датчика, ограничивающие порог разрешения устройства. Чувствительность датчика зависит от резонансной частоты механической подсистемы, а также качества электронного преобразователя.
Чувствительность датчика зависит от резонансной частоты механической подсистемы, а также качества электронного преобразователя.
Изменение чувствительности с температурой связано в основном с изменением коэффициента упругости. Температурный дрейф нуля обусловлен изменением коэффициента упругости, тепловым расширением и технологическими погрешностями изготовления сенсора. Изменение параметров электронной части датчика под действием температуры, как правило, существенно меньше.
Шумы
Общий уровень шумов акселерометра складывается из шумов микромеханического сенсора и шумов электронной части устройства. Вследствие небольшой массы сенсора существенный вклад в общий уровень шумов вносит составляющая, обусловленная его тепловыми колебаниями. Приравняем тепловую энергию шумов к энергии колебаний сенсора:
где k = 1,38×10–23 Дж/К — постоянная Больцмана, T — абсолютная температура, a — среднеквадратичное ускорение, A — амплитуда колебаний.
Выражение дает среднеквадратичное значение шумов во всем спектральном диапазоне. Шум часто характеризуется спектральной плотностью (точнее, величиной, пропорциональной корню спектральной плотности энергии шумов). Если считать шум равномерно распределенным от 0 Гц до частоты резонанса ƒ0, то спектральная плотность шумов nƒ будет равна:
Необходимо также учесть, что значительная часть шумов сосредоточена вблизи резонанса, где спектральная характеристика колебаний сенсора имеет подъем, обратно пропорциональный коэффициенту затухания γ, который имеет смысл величины, обратной времени уменьшения амплитуды в e раз при импульсном воздействии. С учетом этого спектральная среднеквадратичная плотность шумов в области частот значительно ниже резонансной запишется следующим образом:
Для γ = 0,2ω0 = 0,2×2π×5×103 с–1 и m= 10–10 кг получаем nƒ = 88,4 мкg/(Гц)1/2.![]() Среднеквадратичное значение (rms) определяет по существу пороговую чувствительность — минимальный сигнал, который можно измерить. Для получения устойчивого сигнала «без дрожания» порогом шумов следует считать значение размаха шумового сигнала (p-p, peaktopeak). Кроме того, на суммарную величину шумов влияет диапазон рабочих частот Δƒ. Общая среднеквадратичная величина шума Nrms связана со спектральной плотностью шумов Nƒ соотношением (при использовании фильтра НЧ первого порядка):
Среднеквадратичное значение (rms) определяет по существу пороговую чувствительность — минимальный сигнал, который можно измерить. Для получения устойчивого сигнала «без дрожания» порогом шумов следует считать значение размаха шумового сигнала (p-p, peaktopeak). Кроме того, на суммарную величину шумов влияет диапазон рабочих частот Δƒ. Общая среднеквадратичная величина шума Nrms связана со спектральной плотностью шумов Nƒ соотношением (при использовании фильтра НЧ первого порядка):
Для гармонического сигнала его размах (удвоенная амплитуда) отличается от среднеквадратичного значения в 2×(2)1/2 раза. Для шума это отношение представляет собой вероятностную величину. Для белого гауссова шума размах будет лежать в пределах среднеквадратичного значения, умноженного на 6, с вероятностью 0,994:
Уровень шумов практически определяет разрешение по ускорению для данной измерительной системы. Отношение диапазона измерений к уровню шума дает число эффективных значений. Например, для ADXL203 среднеквадратичный шум в полосе частот 10 Гц составит 88,4 мкg/(Гц)1/2×(1,6×10 Гц)1/2 = 0,354 мg, размах шума 0,354×6 = 2,12 мg и число эффективных отсчетов «без дрожания» при аналого-цифровом преобразовании — 3,4/2,12×10–3 ≈ 1600 (3,4 g — диапазон измеряемых ускорений).
Например, для ADXL203 среднеквадратичный шум в полосе частот 10 Гц составит 88,4 мкg/(Гц)1/2×(1,6×10 Гц)1/2 = 0,354 мg, размах шума 0,354×6 = 2,12 мg и число эффективных отсчетов «без дрожания» при аналого-цифровом преобразовании — 3,4/2,12×10–3 ≈ 1600 (3,4 g — диапазон измеряемых ускорений).
Нелинейность
Емкость конденсатора нелинейно зависит от смещения сенсора, линейно связанного с ускорением. В том случае, если сигнал сенсора пропорционален изменению емкостей, относительная нелинейность (отношение нелинейной составляющей изменения емкости к линейной) при смещении обкладок конденсатора x, находящихся на расстоянии d, составит x/d. Это означает, что при смещении 10 нм (d = 1,3 мкм) нелинейные искажения будут порядка 1%. В этом случае, кроме значительной нелинейности, существенно ограничивается также динамический диапазон акселерометра.
Инженерам компании Analog Devices удалось значительно уменьшить нелинейность акселерометра благодаря тому, что сигнал ускорения пропорционален смещению, а не изменению емкости. Это достигается способом возбуждения (сигналы в противофазе) и снятию сигнала напряжения (а не изменения заряда). В результате максимальные нелинейные искажения датчиков ускорения iMEMS составляют доли процентов и, кроме того, расширен динамический диапазон.
Это достигается способом возбуждения (сигналы в противофазе) и снятию сигнала напряжения (а не изменения заряда). В результате максимальные нелинейные искажения датчиков ускорения iMEMS составляют доли процентов и, кроме того, расширен динамический диапазон.
Влияние температуры
Датчики, изготовленные по технологии MEMS, весьма чувствительны к изменению температуры. С изменением температуры меняется коэффициент упругости подвески, и, следовательно, чувствительность сенсора; кроме того, имеет место смещение нуля. Для достижения максимальной точности измерений эти изменения необходимо учитывать.
К счастью, для каждого сенсора зависимость чувствительности и смещения нуля является воспроизводимой, поэтому один из путей решения проблемы — калибровка датчика в необходимом диапазоне температур (рис. 5). При этом удобно наличие естественного «опорного ускорения» g = 9,81м/с2, соответствующего силе тяжести. Оно меняется от 9,789 до 9,823 в зависимости от географического положения, на полюсе Земли оно больше, на экваторе минимально.
Рис. 5. Зависимости выходного напряжения 8 случайно взятых датчиков ADXL330 от температуры при нулевом сигнале ускорения
Линейное приближение температурной зависимости легко компенсировать схемотехнически, более точный учет может потребовать использования микроконтроллера. Другой вариант решения проблемы — встраивание датчика температуры, что заметно упрощает использование подобного подхода.
В акселерометрах зачастую предусмотрена встроенная возможность самокалибровки (самотестирования). Для этого создаются специальные группы балок, подобных тем, которые отвечают за выходной сигнал акселерометра. При приложении постоянного напряжения U между этими балками, расположенными на расстоянии d, возникнет сила электростатического притяжения F, эквивалентная наличию определенной внешней силы или ускорения:
где ε — абсолютная диэлектрическая проницаемость, S — площадь перекрытия балок, W — энергия плоского конденсатора. Прикладываемое напряжение обычно стабилизировано и слабо зависит от температуры. Идея самокалибровки заключается в том, что при изменении температуры выходной сигнал ускорения и выходной сигнал в зависимости от калибрующего смещения меняются пропорционально, так как оба они одинаково зависят от коэффициента упругости подвески.
Идея самокалибровки заключается в том, что при изменении температуры выходной сигнал ускорения и выходной сигнал в зависимости от калибрующего смещения меняются пропорционально, так как оба они одинаково зависят от коэффициента упругости подвески.
Существует режим измерений с непрерывной калибровкой, когда калибровочные импульсы подаются периодически в течение всего процесса измерений. При этом необходимо учитывать уменьшение диапазона измерений на величину размаха калибровочного сигнала (и реальный сигнал, и калибровочный, действуя на один и тот же сенсор, суммируются).
Частотные свойства акселерометров
Частотный диапазон акселерометра определяется собственной частотой сенсора ω0. Частотная характеристика (без учета потерь энергии колебаний) определяется зависимостью вида:
где A0 — сигнал датчика при постоянном воздействии. Соответственно, граница полосы по уровню 3 дБ ω3 дБ будет выражена как:
то есть ω3 дБ = 0,54ω0.
Следует отметить, что датчик может использоваться при более высоких частотах, чем ω3 дБ, особенно в узкой полосе частот. При этом необходим учет изменения чувствительности с частотой. Измерения ускорения редко ведутся во всем частотном диапазоне. Можно выделить низкочастотные приложения (с верхней граничной частотой 10–100 Гц) и динамические, когда выделяется сигнал в полосе более высоких частот.
Специализация датчика по применению позволяет искусственно ограничить полосу рабочих частот, что приводит к существенному снижению суммарного шума. В динамических приложениях часто используется ограничение частоты снизу (например, RC-цепочкой, где емкость является разделяющей), что устраняет проблему смещения нуля.
Диапазон частот настраивается при помощи соответствующего аналогового фильтра или с использованием цифровой фильтрации. Пример построения аналогового фильтра показан на рис. 6. Фильтр образуется RC-цепочкой RFILT и CX,Y. Типичные зависимости чувствительности и фазового сдвига при различных емкостях в цепи фильтра нижних частот показаны на рис. 7.
Типичные зависимости чувствительности и фазового сдвига при различных емкостях в цепи фильтра нижних частот показаны на рис. 7.
Рис. 6. Включение емкостей фильтра нижних частот (CX и CY)
Рис. 7. Типичные спектральные характеристики чувствительности iMEMS акселерометра при различных значениях корректирующих емкостей
Линейка акселерометров Analog Devices и их применение
Компания Analog Devices выпускает широкий спектр акселерометров (табл. 1). Существуют акселерометры с одной, двумя и тремя осями чувствительности, рассчитанными на максимальное ускорение от 1,5 до 250 g. Существуют версии с коммерческим и индустриальным диапазоном рабочих температур.
Таблица 1. Сравнительные технические данные текущей линейки акселерометров компании Analog Devices
Семейство ADXL — это базовые устройства, в которых сенсор и электроника реализованы на едином кристалле. Серия ADXL3xx позиционируется для массового применения, ADXL1xx и ADXL2xx предназначаются для использования в автоэлектронике (автомобилестроении), промышленности и при создании устройств специального назначения.
Акселерометры ADIS представляют собой однокристальные высокоточные устройства с цифровым выходом SPI (12 или 14 бит) и встроенным датчиком температуры.
Как упоминалось выше, при выборе акселерометра необходимо иметь в виду диапазон измеряемых ускорений (табл. 2), требуемое разрешение, температурную стабильность и частотный диапазон. Для устройств, работающих в специальных условиях, необходимо также учитывать диапазон рабочих температур и величину максимально допустимой перегрузки.
Таблица 2. Диапазон измеряемых ускорений
Акселерометры можно использовать в любом устройстве, работа которого связана с перемещением, наклоном, вибрацией. Приведем некоторые типичные применения акселерометров ADI:
- Автомобилестроение. Одно из наиболее массовых приложений для акселерометров в настоящее время. Датчики ускорения используются в данном случае в целях безопасности — при превышении максимально допустимого ускорения срабатывает система безопасности (подушки безопасности).
 Кроме этого они используются в противоугонных системах — как измерители угла наклона и вибраций. В первом случае используются датчики диапазона порядка 35–50 g и выше, во втором — более чувствительные (1–5 g), причем чувствительные и к статическому ускорению; измерение высокочастотных вибраций также может потребовать несколько больший диапазон. Акселерометры могут использоваться и для кратковременной навигации при отсутствии GPS-сигнала, а также для диагностики автомобиля.
Кроме этого они используются в противоугонных системах — как измерители угла наклона и вибраций. В первом случае используются датчики диапазона порядка 35–50 g и выше, во втором — более чувствительные (1–5 g), причем чувствительные и к статическому ускорению; измерение высокочастотных вибраций также может потребовать несколько больший диапазон. Акселерометры могут использоваться и для кратковременной навигации при отсутствии GPS-сигнала, а также для диагностики автомобиля. - Авионика. Датчики ускорения широко используются в системах управления летательными аппаратами, а также в космических системах. Измеряются и вибрации, и квазистатические ускорения.
- Промышленность. Широчайшее поле для использования акселерометров. Любой транспорт, подъемное оборудование, устройства безопасности, системы стабилизации положения, тестовые стенды и многое другое. Применяются датчики любого диапазона.
- Бытовая техника.
 Акселерометры применяются и могут значительно больше применяться во многих видах бытовой техники. Например, для уменьшения вибраций (стиральной машины и др.).
Акселерометры применяются и могут значительно больше применяться во многих видах бытовой техники. Например, для уменьшения вибраций (стиральной машины и др.). - Системы защиты от падения. Резкое изменение ускорения наблюдается сразу после начала падения, что дает возможность перевести систему в наиболее безопасное состояние. Типичный пример — защита жесткого диска в ноутбуках или других мобильных устройствах. Во время падения происходит парковка магнитной головки жесткого диска.
- Медицина и спорт. Акселерометры применяются в системах диагностики, тренажерах, шагомерах и др.
- Устройства ввода информации. Датчики ускорения используются в наладонниках, устройствах ввода для компьютерных игр, мобильных телефонах и т. д.
Средства разработки
Для облегчения разработки прикладной задачи на основе устройств семейства iMEMS предназначены оценочные комплекты (ADXLxxxEB), содержащие необходимое минимальное количество внешних компонентов, требуемых для работы с изделием. Средства разработки для акселерометров серии ADIS включают плату с обвязкой и разъемами, а также интерфейсную плату ADISEVAL для соединения с персональным компьютером через параллельный порт (рис. 8).
Средства разработки для акселерометров серии ADIS включают плату с обвязкой и разъемами, а также интерфейсную плату ADISEVAL для соединения с персональным компьютером через параллельный порт (рис. 8).
Рис. 8. Интерфейсная плата ADISEVAL с присоединенной отладочной платой ADIS16201/PCB (показана красной стрелкой)
Заключение
Разработанные изначально для автомобильных систем развертывания подушек безопасности, акселерометры iMEMS стремительно расширяют область применения. Этому способствует совершенствование технологии, позволяющее получать более экономичные, недорогие и надежные устройства. Акселерометры становятся все более привлекательными для широкого спектра новых разработок.
Дополнительная информация об акселерометрах Analog Devices — на сайте производителя www.analog.com в разделе «iMEMS and Sensors».
Выбор оптимального акселерометра для конкретного приложения
Новейшие емкостные МЭМС-акселерометры находят применение в приложениях, где традиционно доминируют пьезоэлектрические акселерометры и другие датчики.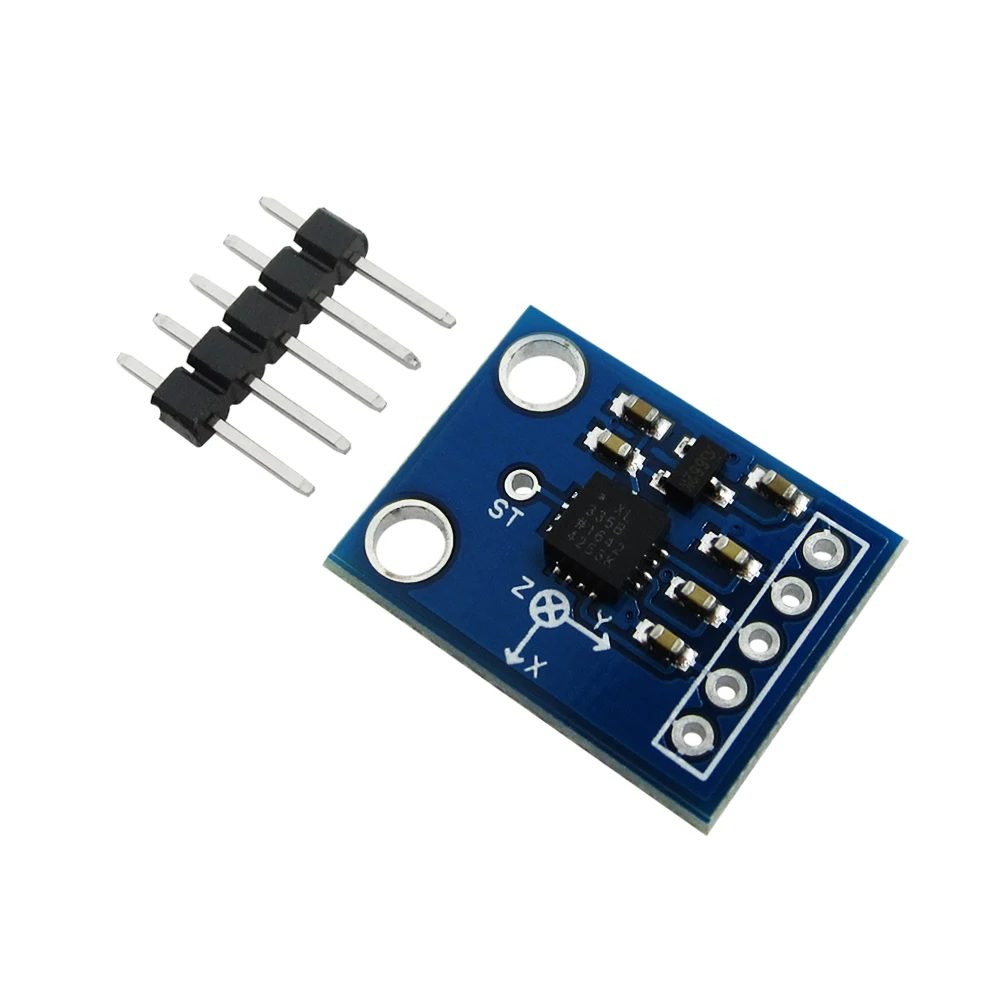 МЭМС-датчики нового поколения станут эффективным решением в таких областях, как системы структурной целостности объектов, мониторинг состояния оборудования, имущества и товаров, системы диагностики организма человека и беспроводные сенсорные сети «Интернета вещей». Однако из-за огромного количества предлагаемых акселерометров и немалого числа приложений выбор подходящего компонента весьма непрост.
МЭМС-датчики нового поколения станут эффективным решением в таких областях, как системы структурной целостности объектов, мониторинг состояния оборудования, имущества и товаров, системы диагностики организма человека и беспроводные сенсорные сети «Интернета вещей». Однако из-за огромного количества предлагаемых акселерометров и немалого числа приложений выбор подходящего компонента весьма непрост.
Сегодня не существует отраслевого стандарта для определения того, к какой категории принадлежит тот или иной акселерометр. Разряды, в соответствии с которыми обычно классифицируются акселерометры, и области их применения показаны в таблице 1. Здесь также отображены величины полосы пропускания и диапазоны измерения ускорений, типичные для акселерометров, используемых в перечисленных приложениях.
Класс акселерометров | Основное применение | Ширина полосы пропускания | Диапазон измеряемых ускорений |
Потребительский | Определение движения, статического ускорения | 0 Гц | 1 g |
Автомобильный | Распознавание аварийных ситуаций/стабилизация положения автомобиля | 100 Гц | <200 g/2 g |
Промышленный | Стабилизация положения платформы/определение угла наклона | 5–500 Гц | 25 g |
Тактический | Оружие/навигационные системы аппаратов | Менее 1 кГц | 8 g |
Навигационный | Подводные лодки/навигационные системы аппаратов | Более 300 Гц | 15 g |
На рис. 1 представлены виды МЭМС-акселерометров компании Analog Devices, где каждый датчик на основе ключевых характеристик соответствует определенному приложению и уровню интеллектуальности/интеграции. Основное внимание в статье уделяется акселерометрам нового поколения, основанным на улучшенных МЭМС-структурах и системах обработки сигналов, а также новейших методах корпусирования, обеспечивающих высокую стабильность и превосходные шумовые характеристики, сравнимые с параметрами более дорогих нишевых устройств, причем новые компоненты потребляют меньше энергии. Эти и другие основные характеристики акселерометров рассмотрены более подробно в следующих разделах, в которых обсуждается применение данных устройств в определенных типах приложений.
1 представлены виды МЭМС-акселерометров компании Analog Devices, где каждый датчик на основе ключевых характеристик соответствует определенному приложению и уровню интеллектуальности/интеграции. Основное внимание в статье уделяется акселерометрам нового поколения, основанным на улучшенных МЭМС-структурах и системах обработки сигналов, а также новейших методах корпусирования, обеспечивающих высокую стабильность и превосходные шумовые характеристики, сравнимые с параметрами более дорогих нишевых устройств, причем новые компоненты потребляют меньше энергии. Эти и другие основные характеристики акселерометров рассмотрены более подробно в следующих разделах, в которых обсуждается применение данных устройств в определенных типах приложений.
Рис. 1. Области применения МЭМС-акселерометров Analog Devices
Определение угла наклона, или крена
Здесь ключевыми критериями являются: стабильность смещения, смещение вследствие влияния температуры, низкий уровень шума, повторяемость результатов измерений, выпрямление вибрационных колебаний, чувствительность по поперечной оси.
Точное определение угла наклона, или крена, — важное требование для емкостных МЭМС-акселерометров, особенно в присутствии вибрации. Использование емкостных МЭМС-акселерометров для достижения точности определения угла наклона 0,1° в динамических средах чрезвычайно затруднительно, добиться точности менее 1°непросто, но точность более 1° вполне достижима. Для того чтобы акселерометр эффективно измерял угол наклона, или крен, следует хорошо понимать характеристики датчика и условия окружающей среды, в которой он функционирует. Статические среды в отличие от динамических обеспечивают гораздо лучшие возможности для измерения угла наклона, поскольку вибрация или удар способны исказить данные о крене и привести к значительным ошибкам в измерениях. Наиболее важными характеристиками для измерения угла наклона считаются смещение температурного коэффициента, гистерезис, низкий уровень шума, стабильность в краткосрочной и долгосрочной перспективе, повторяемость результатов измерений и эффективное выпрямление вибрационных колебаний.
Такие ошибки, как точность смещения нуля, смещение нуля, вызванное пайкой или выравниванием корпуса на печатной плате, смещение нуля из-за влияния температурного коэффициента, точность чувствительности и температурный коэффициент, нелинейность и чувствительность по поперечной оси, являются наблюдаемыми, и их можно уменьшить с помощью процессов калибровки, выполняемых после сборки. Другие погрешности — например, гистерезис, смещение нуля и чувствительности с течением времени, смещение нуля вследствие влияния влажности, а также влияние изгиба и искривления печатной платы из-за колебаний температуры во времени, не могут быть устранены при калибровке. Добиться их уменьшения можно лишь в процессе обслуживания устройства непосредственно на месте эксплуатации.
Акселерометры Analog Devices можно разделить на МЭМС-устройства (ADXLxxx) и компоненты специального назначения iSensor (ADIS16xxx). iSensor, или интеллектуальные датчики, представляют собой программируемые компоненты с высокой степенью интеграции (4–10 степеней свободы), действующие в составе сложных устройств, работающих в динамических условиях. Эти высокоинтегрированные решения полностью откалиброваны на заводе, имеют встроенную систему компенсации параметров и блок обработки сигналов, что минимизирует многие из описанных выше ошибок при обслуживании устройства на месте и значительно снижает затраты на проектирование и проверку. Заводская калибровка охватывает всю сигнальную цепь датчиков и нормализует чувствительность и смещение в заданном диапазоне температур, обычно –40…+85 °C. В результате каждый элемент iSensor имеет свои уникальные формулы коррекции, позволяющие выполнять точные измерения после установки компонента. Для некоторых систем заводская калибровка устраняет необходимость калибровки на уровне системы и значительно упрощает ее в других случаях.
Эти высокоинтегрированные решения полностью откалиброваны на заводе, имеют встроенную систему компенсации параметров и блок обработки сигналов, что минимизирует многие из описанных выше ошибок при обслуживании устройства на месте и значительно снижает затраты на проектирование и проверку. Заводская калибровка охватывает всю сигнальную цепь датчиков и нормализует чувствительность и смещение в заданном диапазоне температур, обычно –40…+85 °C. В результате каждый элемент iSensor имеет свои уникальные формулы коррекции, позволяющие выполнять точные измерения после установки компонента. Для некоторых систем заводская калибровка устраняет необходимость калибровки на уровне системы и значительно упрощает ее в других случаях.
Компоненты iSensor специально предназначены для конкретных приложений. Так, ADIS16210 (рис. 2) разработан для приложений, в которых требуется определять угол наклона, поэтому его относительная точность без выполнения дополнительной калибровки составляет менее 1°. В основном это достигается благодаря встроенным алгоритмам обработки сигналов и калибровке каждого конкретного компонента для обеспечения оптимальной точности. Датчики серии iSensor описаны далее в разделе «Стабилизация».
Датчики серии iSensor описаны далее в разделе «Стабилизация».
Рис. 2. Прецизионный трехосный датчик угла наклона ADIS16210
Архитектуры акселерометров последнего поколения, в частности ADXL355, отличаются большей универсальностью (устройства могут применяться для определения наклона, мониторинга состояния оборудования, определения структурной целостности конструкций, курса и пространственного положения, а также в качестве инерциальных измерительных модулей) и содержат меньше специализированных компонентов, но имеют многофункциональные интегрированные блоки (рис. 3).
Рис. 3. Трехосевой МЭМС-акселерометр ADXL355 с низким уровнем шума, малым дрейфом и низким энергопотреблением
Итак, сравним акселерометр общего назначения ADXL345 с акселерометром нового поколения ADXL355 с низким уровнем шума, малым дрейфом и низким энергопотреблением, который идеален для использования в различных приложениях, таких как сенсорные узлы «Интернета вещей» и инклинометры. Рассмотрим источники ошибок при определении угла наклона, и то, какие ошибки могут быть компенсированы или устранены. В таблице 2 приведены эксплуатационные характеристики акселерометров для потребительских устройств ADXL345 и соответствующие ошибки измерения угла наклона. В данном случае, чтобы достичь наилучшей точности определения угла наклона необходимо выполнить температурную стабилизацию или компенсацию. В этом примере предполагается, что температура постоянна и равна +25 °C. Наиболее существенными факторами, которые не могут быть полностью компенсированы, являются смещение вследствие влияния температуры, дрейф смещения и шум. Для снижения шума можно уменьшить ширину полосы пропускания, поскольку для определения угла наклона обычно требуется полоса пропускания менее 1 кГц.
Рассмотрим источники ошибок при определении угла наклона, и то, какие ошибки могут быть компенсированы или устранены. В таблице 2 приведены эксплуатационные характеристики акселерометров для потребительских устройств ADXL345 и соответствующие ошибки измерения угла наклона. В данном случае, чтобы достичь наилучшей точности определения угла наклона необходимо выполнить температурную стабилизацию или компенсацию. В этом примере предполагается, что температура постоянна и равна +25 °C. Наиболее существенными факторами, которые не могут быть полностью компенсированы, являются смещение вследствие влияния температуры, дрейф смещения и шум. Для снижения шума можно уменьшить ширину полосы пропускания, поскольку для определения угла наклона обычно требуется полоса пропускания менее 1 кГц.
Параметр датчика | Показатели | Условия/примечания | Ошибка определения ускорения | Погрешность определения угла наклона |
Шум | По осям X, Y 290 мкg/√(Гц) | Полоса пропускания 6,25 Гц | 0,9 мg | 0,05° |
Дрейф смещения | Дисперсия Аллана | По осям X, Y в течение короткого промежутка времени (например, 10 дней) | 1 мg | 0,057° |
Начальное смещение | 35 мg | Без компенсации | 35 мg | 2° |
С компенсацией | 0 мg | 0° | ||
Ошибка | Без компенсации | Полоса пропускания 6,25 Гц | 36,9 мg | 2,1° |
Ошибка | С компенсацией | Полоса пропускания 6,25 Гц | 1,9 мg | 0,1° |
В таблице 3 показаны те же критерии для ADXL355.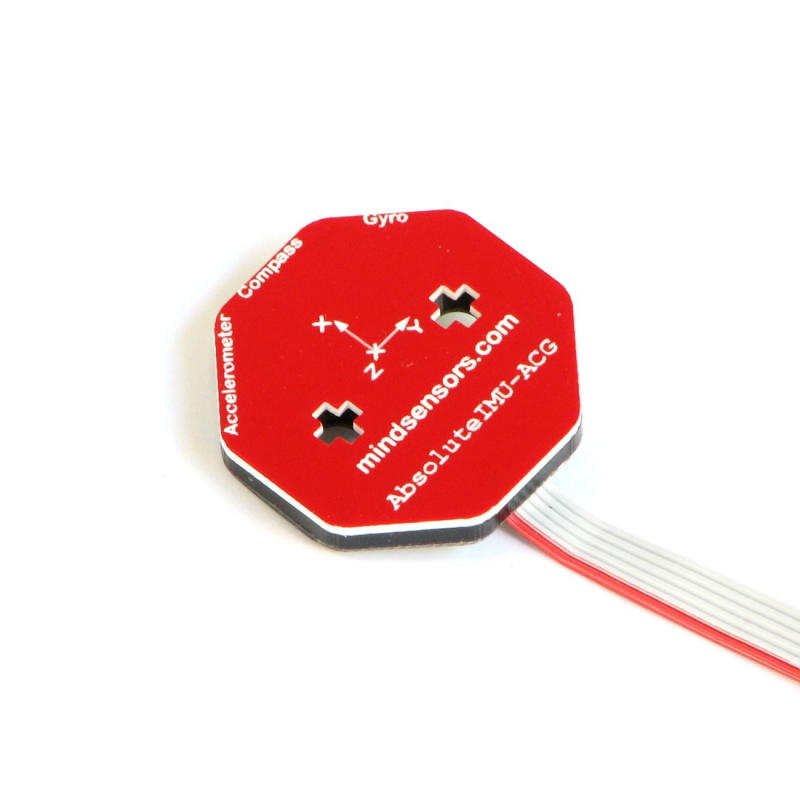 Краткосрочные значения смещения оценивались по диаграммам дисперсии Аллана, приведенным в документации на ADXL355. Для акселерометров общего назначения ADXL345 скомпенсированная точность определения угла наклона при +25 °C равна 0,1°. Для акселерометров промышленного класса ADXL355 эта точность составляет 0,005°. Сравнивая ADXL345 и ADXL355, можно заметить, что такой существенный фактор возникновения ошибок измерения, как шум, был значительно уменьшен с 0,05° до 0,0045°, дрейф смещения сокращен с 0,057° до 0,00057°. Это демонстрирует огромный скачок в области снижения шума и дрейфа смещения емкостных МЭМС-акселерометров, что позволяет значительно повысить уровень точности определения угла наклона в динамических условиях.
Краткосрочные значения смещения оценивались по диаграммам дисперсии Аллана, приведенным в документации на ADXL355. Для акселерометров общего назначения ADXL345 скомпенсированная точность определения угла наклона при +25 °C равна 0,1°. Для акселерометров промышленного класса ADXL355 эта точность составляет 0,005°. Сравнивая ADXL345 и ADXL355, можно заметить, что такой существенный фактор возникновения ошибок измерения, как шум, был значительно уменьшен с 0,05° до 0,0045°, дрейф смещения сокращен с 0,057° до 0,00057°. Это демонстрирует огромный скачок в области снижения шума и дрейфа смещения емкостных МЭМС-акселерометров, что позволяет значительно повысить уровень точности определения угла наклона в динамических условиях.
Параметр датчика | Показатели | Условия/примечания | Ошибка определения ускорения | Погрешность определения угла наклона |
Шум | 25 мкg/√(Гц) | Полоса пропускания 6,25 Гц | 78 мкg | 0,0045° |
Дрейф смещения | Дисперсия Аллана | По осям X, Y в течение короткого промежутка времени (например, 10 дней) | Менее 10 мкg | 0,00057° |
Начальное смещение | 25 мg | Без компенсации | 25 мg | 1,43° |
С компенсацией | 0 мg | 0° | ||
Полная ошибка | Без компенсации | Полоса пропускания 6,25 Гц | 25 мg | 1,43° |
Полная ошибка | С компенсацией | Полоса пропускания 6,25 Гц | 88 мкg | 0,005° |
Выбор акселерометра более высокого класса имеет решающее значение для достижения требуемых характеристик, особенно если точность определения угла наклона должна быть менее 1°. Точность варьируется в зависимости от условий применения (большие колебания температуры, вибрация) и выбора датчика (компоненты потребительского класса или компоненты промышленного/тактического класса). В данном случае ADXL345 потребует значительных усилий по выполнению компенсации и калибровки для достижения погрешности менее 1°, что увеличит общее время производства системы и ее стоимость. В зависимости от уровня вибрации в рабочей среде и температурного диапазона это может оказаться недостижимым. При температуре +25…+85 °C дрейф смещения температурного коэффициента составляет 1,375°, что уже превышает требование обеспечения точности при определении угла наклона менее 1°.
Точность варьируется в зависимости от условий применения (большие колебания температуры, вибрация) и выбора датчика (компоненты потребительского класса или компоненты промышленного/тактического класса). В данном случае ADXL345 потребует значительных усилий по выполнению компенсации и калибровки для достижения погрешности менее 1°, что увеличит общее время производства системы и ее стоимость. В зависимости от уровня вибрации в рабочей среде и температурного диапазона это может оказаться недостижимым. При температуре +25…+85 °C дрейф смещения температурного коэффициента составляет 1,375°, что уже превышает требование обеспечения точности при определении угла наклона менее 1°.
Для ADXL355 максимальный дрейф смещения температурного коэффициента равен 0,5° при температуре +25…+85 °C.
Повторяемость результатов измерений для ADXL354 и ADXL355 (±3,5 мg/0,2° по осям X и Y, ±9 мg/0,5° по оси Z) прогнозируется на 10 лет эксплуатации и учитывает смещения, возникшие вследствие испытаний под высокой температурой в течение длительного периода (испытания проводились в течение 1000 ч при температуре +150 °C, напряжении питания 3,6 В), циклического воздействия температуры (1000 циклов изменения температуры в диапазоне −55…+125 °C), влияния случайного блуждания угловой скорости, широкополосного шума и температурного гистерезиса. Благодаря высокой повторяемости результатов измерений при любых условиях новые акселерометры обеспечивают минимальную ошибку определения угла наклона без дополнительной калибровки для работы в жестких условиях окружающей среды, а также минимизируют потребность в калибровке после ввода устройства в эксплуатацию. Акселерометры ADXL354 и ADXL355 поддерживают гарантированную температурную стабильность с максимальным коэффициентом смещения нуля 0,15 мg/°C. Это сокращает затраты, связанные с калибровкой и тестированием, что в конечном итоге позволяет производителям выпускать большее количество устройств за то же время. Кроме того, герметичный корпус гарантирует, что конечный продукт будет соответствовать своим показателям повторяемости и стабильности после того, как он покинет завод.
Благодаря высокой повторяемости результатов измерений при любых условиях новые акселерометры обеспечивают минимальную ошибку определения угла наклона без дополнительной калибровки для работы в жестких условиях окружающей среды, а также минимизируют потребность в калибровке после ввода устройства в эксплуатацию. Акселерометры ADXL354 и ADXL355 поддерживают гарантированную температурную стабильность с максимальным коэффициентом смещения нуля 0,15 мg/°C. Это сокращает затраты, связанные с калибровкой и тестированием, что в конечном итоге позволяет производителям выпускать большее количество устройств за то же время. Кроме того, герметичный корпус гарантирует, что конечный продукт будет соответствовать своим показателям повторяемости и стабильности после того, как он покинет завод.
Обычно повторяемость и устойчивость к ошибкам выпрямления вибрационных колебаний (VRE, или vibration rectification error) не приводятся в документации, поскольку это может служить потенциальным индикатором более низкой производительности. Например, ADXL345 является акселерометром общего назначения, ориентированным на потребительские приложения, где ошибки VRE не считаются ключевым фактором для разработчиков. Однако в более сложных приложениях, таких как устройства инерциальной навигации, приборы для определения угла наклона или оборудование, работающее в среде с высоким уровнем вибрации, устойчивость к VRE, вероятно, будет основным параметром, на который обратит внимание разработчик, поэтому данная характеристика включена в документацию на акселерометры ADXL354/ADXL355 и ADXL356/ADXL357.
Например, ADXL345 является акселерометром общего назначения, ориентированным на потребительские приложения, где ошибки VRE не считаются ключевым фактором для разработчиков. Однако в более сложных приложениях, таких как устройства инерциальной навигации, приборы для определения угла наклона или оборудование, работающее в среде с высоким уровнем вибрации, устойчивость к VRE, вероятно, будет основным параметром, на который обратит внимание разработчик, поэтому данная характеристика включена в документацию на акселерометры ADXL354/ADXL355 и ADXL356/ADXL357.
Как показано в таблице 4, VRE представляет собой ошибку смещения, возникающую, когда акселерометры подвергаются влиянию широкополосной вибрации. Когда на акселерометр действуют вибрации, этот параметр вносит в результаты измерения угла наклона погрешность, существенную по сравнению со смещением нуля в зависимости от температуры и шумом. Такова одна из основных причин, по которой данный параметр не указывается в документации, поскольку он может очень легко отодвинуть на второй план другие ключевые характеристики.
VRE — отклик акселерометра на вибрационные колебания, выраженные сигналами переменного тока, которые выпрямляются в сигналы постоянного тока. Эти выпрямленные колебания могут сдвигать смещение акселерометра, что приводит к значительным ошибкам, особенно в устройствах определения угла наклона, где представляющая интерес информация является сигналами постоянного тока. Любое небольшое изменение смещения по постоянному току может быть интерпретировано как изменение угла наклона и привести к ошибкам на системном уровне.
Компонент | Максимальная ошибка смещения нуля при изменении температуры, °/°C | Плотность шума, °/√(Гц) | Выпрямление вибрационных колебаний, °/g2 с.к.з. |
ADXL354 | 0,0085 | 0,0011 | 0,023* |
ADXL355 | 0,0085 | 0,0014 | 0,023* |
Примечание. *Диапазон ±2g в ориентации 1g, смещение из-за вибрации 2,5g с.к.з.
*Диапазон ±2g в ориентации 1g, смещение из-за вибрации 2,5g с.к.з.
Ошибка VRE может быть вызвана влиянием различных резонансных контуров и фильтров внутри акселерометра, в данном случае функционирование ADXL355 из-за такой ошибки имеет сильную зависимость от частоты. Вибрационные колебания усиливаются этими резонансными контурами с коэффициентом, равным добротности контура, и на более высоких частотах колебания будут затухать вследствие воздействия второго порядка передаточной функции резонатора, имеющей два полюса. Чем выше добротность, тем выше VRE из-за большего усиления вибраций. Увеличение ширины полосы измерения приводит к появлению высокочастотных внутриполосных колебаний, что вызывает повышение VRE (рис. 4). Многих проблем, связанных с вибрацией, можно избежать, если выбрать для акселерометра подходящую полосу пропускания, чтобы избавиться от высокочастотных колебаний [1].
Рис. 4. VRE акселерометра ADXL355 при различных полосах пропускания
Для измерения угла наклона в статике обычно требуются акселерометры с небольшим диапазоном измеряемых ускорений ±1…±2 g и полосой пропускания менее 1,5 кГц. ADXL354 с аналоговым выходом и ADXL355 с цифровым выходом представляют собой трехосевые малопотребляющие акселерометры с низкой плотностью шума (20 мкg√Гц и 25 мкg√Гц соответственно), малым дрейфом смещения нуля, встроенными датчиками температуры и выбираемыми диапазонами измерения, как показано в таблице 5.
ADXL354 с аналоговым выходом и ADXL355 с цифровым выходом представляют собой трехосевые малопотребляющие акселерометры с низкой плотностью шума (20 мкg√Гц и 25 мкg√Гц соответственно), малым дрейфом смещения нуля, встроенными датчиками температуры и выбираемыми диапазонами измерения, как показано в таблице 5.
Компонент | Диапазон измерения, g | Ширина полосы пропускания, кГц |
ADXL354B | ±2, ±4 | 1,5 |
ADXL354C | ±2, ±8 | 1,5 |
ADXL355B | ±2, ±4, ±8 | 1 |
ADXL356B | ±10, ±20 | 1,5 |
ADXL356C | ±10, ±40 | 1,5 |
ADXL357B | ±10,24; ±20,48; ±40,96 | 1 |
Акселерометры ADXL354/ADXL355 и ADXL356/ADXL357 поставляются в герметичных корпусах, что обеспечивает превосходную долговременную стабильность. Как правило, на производительность акселерометра влияют способы корпусирования, как показано на рис. 5. Когда речь идет о том, что может сделать производитель, чтобы повысить стабильность и уменьшить дрейф, зачастую корпусирование даже не рассматривается. Но это ключевое направление работы Analog Devices, и доказательство тому — широкий спектр разных типов корпусов, которые соответствуют различным областям применения.
Как правило, на производительность акселерометра влияют способы корпусирования, как показано на рис. 5. Когда речь идет о том, что может сделать производитель, чтобы повысить стабильность и уменьшить дрейф, зачастую корпусирование даже не рассматривается. Но это ключевое направление работы Analog Devices, и доказательство тому — широкий спектр разных типов корпусов, которые соответствуют различным областям применения.
Рис. 5. Примеры повышения производительности за счет усовершенствованных методов корпусирования и калибровки
Высокотемпературные и динамические среды
До появления акселерометров, рассчитанных на эксплуатацию при высокой температуре или в жестких условиях окружающей среды, некоторые разработчики вынуждены были использовать микросхемы со стандартным температурным диапазоном, выходя за пределы указанных в документации характеристик. То есть конечный пользователь должен был взять на себя ответственность и риски, связанные с аттестацией компонента для работы при повышенных температурах, что дорого и требует много времени. Известно, что герметичные корпуса весьма надежны при повышенных температурах и обеспечивают защиту от влаги и загрязнений, вызывающих коррозию. Analog Devices предлагает ряд компонентов в герметичных корпусах, характеризующихся повышенной стабильностью и высокой производительностью в широком диапазоне температур. Компания провела значительную работу по изучению производительности компонентов в пластиковых корпусах при повышенных температурах, в частности оценивалась способность выводных рамок и выводов микросхем выдерживать высокотемпературные процессы пайки и обеспечивать надежное крепление, способное противостоять сильным ударам и вибрации. В результате Analog Devices предлагает 18 акселерометров, функционирующих в диапазоне температур –40…+125 °C, среди которых можно назвать ADXL206, ADXL354/ADXL355/ADXL356/ADXL357, ADXL1001/ADXL1002, ADIS16227/ADIS16228 и ADIS16209. Большинство конкурентов не предлагают емкостные МЭМС-акселерометры, способные работать в указанных температурных пределах или в жестких условиях окружающей среды — например, в составе тяжелого промышленного оборудования или при бурении и разведке скважин.
Известно, что герметичные корпуса весьма надежны при повышенных температурах и обеспечивают защиту от влаги и загрязнений, вызывающих коррозию. Analog Devices предлагает ряд компонентов в герметичных корпусах, характеризующихся повышенной стабильностью и высокой производительностью в широком диапазоне температур. Компания провела значительную работу по изучению производительности компонентов в пластиковых корпусах при повышенных температурах, в частности оценивалась способность выводных рамок и выводов микросхем выдерживать высокотемпературные процессы пайки и обеспечивать надежное крепление, способное противостоять сильным ударам и вибрации. В результате Analog Devices предлагает 18 акселерометров, функционирующих в диапазоне температур –40…+125 °C, среди которых можно назвать ADXL206, ADXL354/ADXL355/ADXL356/ADXL357, ADXL1001/ADXL1002, ADIS16227/ADIS16228 и ADIS16209. Большинство конкурентов не предлагают емкостные МЭМС-акселерометры, способные работать в указанных температурных пределах или в жестких условиях окружающей среды — например, в составе тяжелого промышленного оборудования или при бурении и разведке скважин.
Выполнение измерений угла наклона в очень жестких условиях окружающей среды с температурой выше +125 °C — задача чрезвычайно сложная. ADXL206 представляет собой высокоточный (точность измерения угла наклона ±0,06°) малопотребляющий МЭМС-акселерометр, предназначенный для приложений с высокотемпературными и суровыми средами, таких как бурение и разведка скважин. Этот компонент имеет керамический корпус размером 13×8×2 мм с двумя рядами расположенных по бокам выводов, который способен функционировать в температурном диапазоне −40…+175 °C с ухудшением характеристик после +175 °C и 100%-ной восстановимостью при возобновлении работы при температурах ниже +175 °C.
Для измерения угла наклона в динамических средах, где присутствует вибрация, например в сельскохозяйственной технике или беспилотных летательных аппаратах, требуются акселерометры с более широким диапазоном измерения ускорений, в частности ADXL356/ADXL357. Выполнение измерений в ограниченном диапазоне может привести к отсечке результирующего значения, что вызывает дополнительное смещение к выходному сигналу. Отсечка может возникнуть из-за того, что ось измерения присутствует в гравитационном поле 1 g, или из-за ударов с быстрым временем нарастания и медленным затуханием. При измерениях в более широком диапазоне величина отсечки сокращается, что уменьшает смещение, это в свою очередь повышает точность определения угла наклона в динамических приложениях.
Отсечка может возникнуть из-за того, что ось измерения присутствует в гравитационном поле 1 g, или из-за ударов с быстрым временем нарастания и медленным затуханием. При измерениях в более широком диапазоне величина отсечки сокращается, что уменьшает смещение, это в свою очередь повышает точность определения угла наклона в динамических приложениях.
На рис. 6 показаны результаты измерения в ограниченном диапазоне ускорений по оси Z акселерометра ADXL356, причем гравитационное поле 1 g уже присутствует в этом диапазоне измерений.
Рис. 6. Ошибка VRE акселерометра ADXL356, смещение по оси Z от 1 g, диапазон измеряемых ускорений ±10 g, ориентация по оси Z = 1 g
На рис. 7 даны те же измерения, но диапазон расширен с ±10 до ±40 g. Эти графики четко демонстрируют, что смещение, вызванное отсечкой, значительно уменьшается за счет расширения диапазона измеряемых ускорений акселерометра.
Рис. 7. Ошибка VRE акселерометра ADXL356, смещение по оси Z от 1 g, диапазон измеряемых ускорений ±40 g, ориентация по оси Z = 1 g
Акселерометры ADXL354/ADXL355 и ADXL356/ADXL357 обеспечивают эффективное выпрямление вибрационных колебаний, повторяемость результатов измерения на протяжении длительного времени и низкий уровень шума в компактном корпусе и идеально подходят для измерения угла наклона и крена как в статической, так и в динамической среде.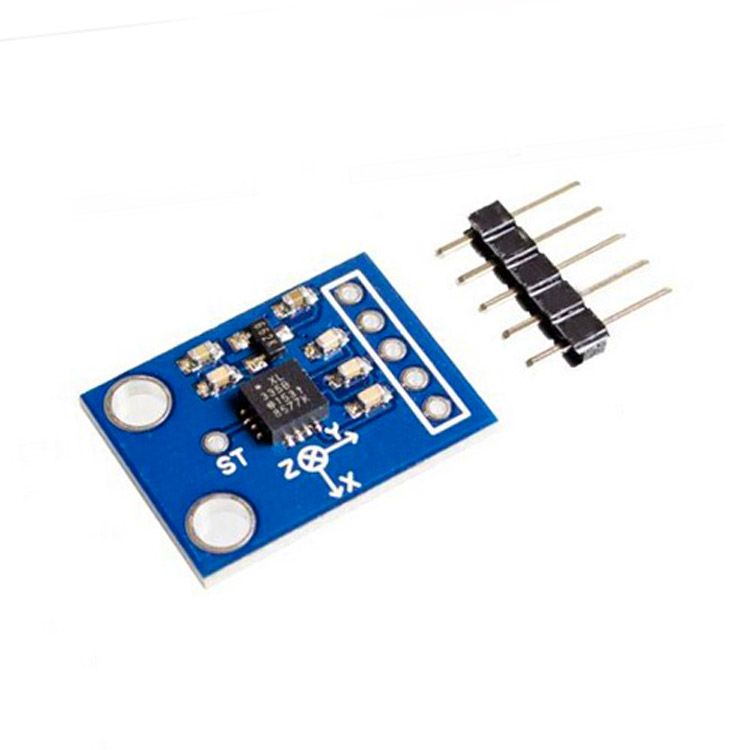
Стабилизация
Понятие стабилизации определяется следующими основными критериями: плотность шума, случайное блуждание угловой скорости, стабильность смещения во время работы, повторяемость смещения и ширина полосы пропускания.
Возможность обнаружения движения и интерпретация информации о нем может повысить значимость многих приложений. Эта значимость увеличивается за счет получения данных о движении, которое испытывает система, и их обработки с целью повышения производительности (сокращения времени отклика, увеличения точности или скорости работы), безопасности и надежности (отключение системы в опасных ситуациях) или с целью реализации других дополнительных функций. Существует большой класс приложений стабилизации объектов, которые из-за сложности движения требуют сочетания гироскопов с акселерометрами (слияние датчиков), как показано на рис. 8. Такие устройства необходимы в составе оборудования для наблюдений на базе БПЛА и в системах ориентации антенн, используемых на судах [2].
Рис. 8. Инерциальный измерительный модуль с шестью степенями свободы
Инерциальные измерительные модули с шестью степенями свободы содержат несколько датчиков, чтобы компенсировать слабые стороны каждого из них. То, что может показаться простым инерциальным движением по одной или двум осям, на самом деле требует взаимосвязи акселерометра и гироскопа, чтобы компенсировать влияние вибрации, гравитации и других факторов, которые акселерометр или гироскоп по отдельности не смогли бы точно измерить. Данные акселерометра состоят из гравитационной составляющей и ускорения движения. Их нельзя разделить, но можно использовать гироскоп, чтобы убрать гравитационную составляющую из выходного сигнала акселерометра. Незначительная ошибка, связанная с гравитационной составляющей, может быстро превратиться в большую проблему после необходимого процесса интеграции для определения положения в зависимости от ускорения. Из-за ошибки накопления для определения положения одного гироскопа недостаточно.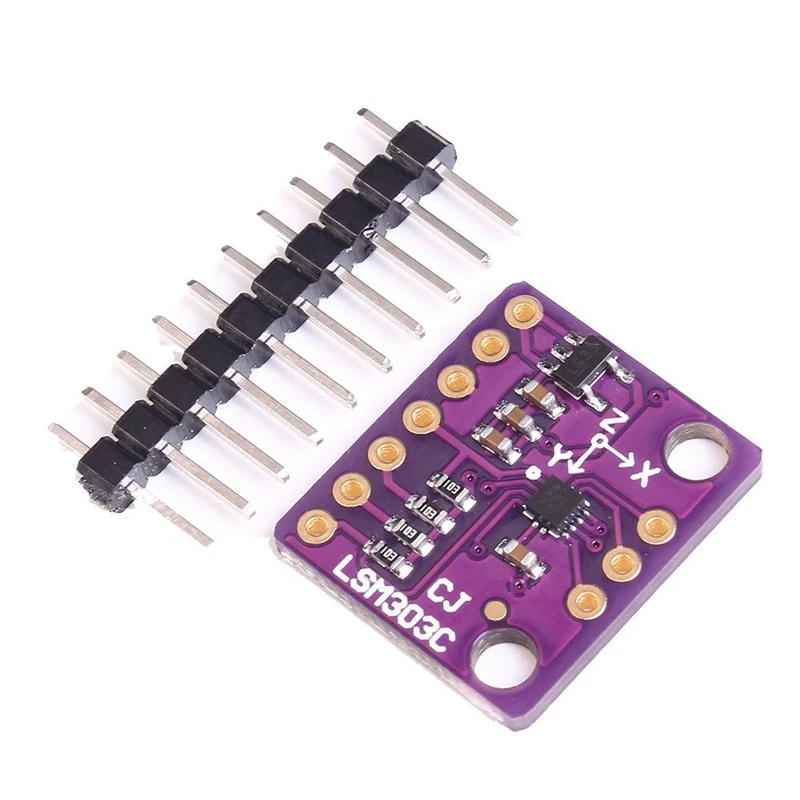 Гироскопы не могут измерять силу тяготения, поэтому они служат в качестве дополнительного датчика, делающего показания акселерометра более точными.
Гироскопы не могут измерять силу тяготения, поэтому они служат в качестве дополнительного датчика, делающего показания акселерометра более точными.
В приложениях стабилизации МЭМС-датчик должен обеспечивать точное определение ориентации платформы, особенно когда она находится в движении. На рис. 9 показана блок-схема стандартной системы стабилизации положения платформы, использующей серводвигатели для коррекции углового движения. Контроллер серводвигателей (обратной связи) преобразует полученные с датчиков данные об ориентации платформы в пространстве в корректирующие сигналы управления серводвигателями.
Рис. 9. Стандартная система стабилизации положения платформы
Конечное приложение будет определять требуемый уровень точности, а качество выбранного датчика потребительского или промышленного класса определит, достижима ли такая точность или нет. Важно различать устройства потребительского класса и устройства промышленного класса, и в некоторых случаях может потребоваться тщательное изучение характеристик, поскольку различия могут быть незначительными.![]() В таблице 6 показаны основные различия между акселерометрами потребительского класса и акселерометрами промышленного класса среднего уровня, интегрированными в инерциальные измерительные модули. Точность промышленных МЭМС-устройств более чем на порядок выше по сравнению с потребительскими датчиками, и характеристики всех известных потенциальных источников ошибок в них лучше изучены и описаны [2].
В таблице 6 показаны основные различия между акселерометрами потребительского класса и акселерометрами промышленного класса среднего уровня, интегрированными в инерциальные измерительные модули. Точность промышленных МЭМС-устройств более чем на порядок выше по сравнению с потребительскими датчиками, и характеристики всех известных потенциальных источников ошибок в них лучше изучены и описаны [2].
Параметры акселерометра | Типовые характеристики для промышленных приложений | Во сколько раз лучше обычных потребительских устройств |
Динамический диапазон | До 40g | 3× |
Плотность шума | 25 мкg/√Гц | 10× |
Случайное блуждание угловой скорости | 0,03 м/с/√Гц | 10× |
Стабильность смещения во время работы | 10 мкg | 10× |
Повторяемость смещения | 25 мg | 100× |
Ширина полосы частот на уровне –3 дБ | 500 Гц | 3× |
В некоторых случаях, когда условия являются не слишком жесткими и приемлемы неточные данные, устройство с низкой точностью может обеспечить адекватную производительность. Тем не менее требования к датчику, работающему в динамических условиях, существенно выше, и компоненты с низкой точностью не способны обеспечить адекватные выходные сведения из-за невозможности уменьшить влияние вибрации на результаты измерений или влияние температуры, поэтому они лишь выполняют измерения с точностью 3–5°. В документации на многие потребительские МЭМС-устройства не указываются такие параметры, как выпрямление вибрационных колебаний, угловой случайный уход (шума), и другие характеристики, которые в действительности могут стать самыми большими источниками ошибок в промышленных приложениях.
Тем не менее требования к датчику, работающему в динамических условиях, существенно выше, и компоненты с низкой точностью не способны обеспечить адекватные выходные сведения из-за невозможности уменьшить влияние вибрации на результаты измерений или влияние температуры, поэтому они лишь выполняют измерения с точностью 3–5°. В документации на многие потребительские МЭМС-устройства не указываются такие параметры, как выпрямление вибрационных колебаний, угловой случайный уход (шума), и другие характеристики, которые в действительности могут стать самыми большими источниками ошибок в промышленных приложениях.
Для того чтобы в динамических средах выполнять измерения с точностью 1–0,1°, при выборе компонентов разработчик должен сосредоточиться на способности датчиков компенсировать дрейф ошибки при изменении температуры и влияние вибрационных колебаний. Хотя блоки фильтрации внутри датчиков и алгоритмы совместной обработки сигналов с разных датчиков являются основными элементами, позволяющими достигнуть высокой эффективности, они не способны устранить разрыв в производительности между устройствами потребительского и промышленного классов. Выпускаемые Analog Devices промышленные инерциальные измерительные модули нового поколения достигают производительности, близкой к той, что характерна для систем управления ракетным оружием предыдущего поколения. Такие компоненты, как ADIS1646x и ADIS1647x, обеспечивают точное измерение движения в стандартном форм-факторе и форм-факторе mini IMU, предоставляя возможности, прежде доступные только в узконишевых приложениях.
Во второй части публикации мы продолжим изучать основные характеристики МЭМС-акселерометров и их применение в носимых устройствах, при мониторинге состояния оборудования и «Интернета вещей», включая мониторинг структурной целостности объектов и мониторинг состояния имущества и товаров.
Продолжение статьи
Литература- Pham L., DeSimone A. Vibration Rectification in MEMS Accelerometers. Analog Devices, Inc., 2017
- Scannell B. High Performance Inertial Sensors Propelling the Internet of Moving Things. Analog Devices, Inc., 2017.
- Looney M. Analyzing Frequency Response of Inertial MEMS in Stabilization Systems // Analog Dialogue. 2012. Vol. 46.
• Измерения динамической деформации • Измерение вибрации тела человека • Криогеннаятемпература • Высокаятемпература • Модальные испытания Среди разработок компании PCB имеется множество акселерометров для решения широчайшего спектра задач измерения. Среди этих датчиков можно отметить как изготовленные в единичном экземпляре эксклюзивные устройства, так и производимые тысячными партиями акселерометры, соответствующие специальным требованиям. Богатейший опыт и постоянное стремление к совершенствованию процессов разработки, производства и тестирования датчиков позволяют компании PCB полностью удовлетворить потребности заказчика в акселерометрах, необходимых для проведения уникальных измерений. Во многих случаях использования имеющихся стандартных опций достаточно для конфигурирования требуемого датчика. Существует и множество специальных опций, начиная от дополнительных процедур тестирования или калибровки до полного изменения конструкции или проектирования с нуля. PCB поможет найти правильное решение для повседневных измерений и проведения нестандартных исследований. Описание моделей, приведенное в данном разделе, дает лишь небольшое представление о специализированных акселерометрах. Акселерометры для работы в криогенных средах (до -196 0С)
Промышленный высокотемпературный акселерометр со встроенным кабелем и усилителем заряда
Модель 740B02 — ICP® — датчик динамической деформации.
Модель 356B41— Трехкомпонентный ICP® — акселерометр для установки в подушки сиденья.
Модель 352A60— Ультра-высокочастотный ICP® акселерометр (до 60 кГц).
* | |||||
Лучшая цена вибрации датчика акселерометра — Отличные предложения по вибрации датчика акселерометра от глобальных продавцов вибрации датчика акселерометра
Отличные новости !!! Вы попали в нужное место для определения вибрации датчика акселерометра. К настоящему времени вы уже знаете, что что бы вы ни искали, вы обязательно найдете это на AliExpress. У нас буквально тысячи отличных продуктов во всех товарных категориях.Ищете ли вы товары высокого класса или дешевые и недорогие оптовые закупки, мы гарантируем, что он есть на AliExpress.
Вы найдете официальные магазины торговых марок наряду с небольшими независимыми продавцами со скидками, каждый из которых предлагает быструю доставку и надежные, а также удобные и безопасные способы оплаты, независимо от того, сколько вы решите потратить.
AliExpress никогда не уступит по выбору, качеству и цене.Каждый день вы будете находить новые онлайн-предложения, скидки в магазинах и возможность сэкономить еще больше, собирая купоны. Но вам, возможно, придется действовать быстро, поскольку этот лучший датчик вибрации акселерометра скоро станет одним из самых востребованных бестселлеров. Подумайте, как вам будут завидовать друзья, когда вы скажете им, что приобрели датчик вибрации акселерометра на AliExpress. Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Если вы все еще не уверены в вибрации датчика акселерометра и думаете о выборе аналогичного товара, AliExpress — отличное место для сравнения цен и продавцов. Мы поможем вам разобраться, стоит ли доплачивать за высококачественную версию или вы получаете столь же выгодную сделку, приобретая более дешевую вещь. А если вы просто хотите побаловать себя и потратиться на самую дорогую версию, AliExpress всегда позаботится о том, чтобы вы могли получить лучшую цену за свои деньги, даже сообщая вам, когда вам будет лучше дождаться начала рекламной акции. , а также ожидаемую экономию.AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе. Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца. Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг и часто имеет комментарии, оставленные предыдущими клиентами, описывающими их опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз.Короче говоря, вам не нужно верить нам на слово — просто слушайте миллионы наших довольных клиентов.
А если вы новичок на AliExpress, мы откроем вам секрет. Непосредственно перед тем, как вы нажмете «купить сейчас» в процессе транзакции, найдите время, чтобы проверить купоны — и вы сэкономите еще больше. Вы можете найти купоны магазина, купоны AliExpress или собирать купоны каждый день, играя в игры в приложении AliExpress.Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, мы думаем, вы согласитесь, что вы получите датчик вибрации акселерометра по самой выгодной цене.
У нас всегда есть новейшие технологии, новейшие тенденции и самые обсуждаемые лейблы. На AliExpress отличное качество, цена и сервис всегда в стандартной комплектации. Начните самый лучший шоппинг прямо здесь.
Акселерометры— Высокопроизводительные акселерометры
Открытая левосторонняя навигацияАэрокосмическая промышленность
- Учиться
Закрыть боковую навигацию
Узнать больше
- Учиться
- Подключенный самолет
Закрыть боковую навигацию
- Подключенный самолет
- Авиакомпании и грузовые перевозки
- Деловая авиация
- Правительство и оборона
- Вызовы
Закрыть боковую навигацию
- Вызовы
- Мандаты встречи
- Безопасность
- Прогнозная статистика
- Готовность к миссии
- Эффективность
- Продуктивность
- Спектакль
- Время безотказной работы
- Удобство и удобство использования
- Комфорт
- Поддерживаемые платформы
Закрыть боковую навигацию
- Поддерживаемые платформы
- Авиакомпании и грузовые перевозки
- Бизнес-джет
- Защита
- Авиация общего назначения
- Вертолеты
- Космос
- БПЛА и городская авиамобильность
- Самолеты по производителям
- Программы
Закрыть боковую навигацию
- Программы
- Приложения для подключения к кабине
- Приложения для кабины пилотов и полетов
- Приложения для обслуживания
- Продукты
Закрыть боковую навигацию
- Продукты
- Срабатывание
Поставщики и ресурсы беспроводной связи RF
О компании RF Wireless World
Веб-сайт RF Wireless World является домом для поставщиков и ресурсов радиочастотной и беспроводной связи.На сайте представлены статьи, руководства, поставщики, терминология, исходный код (VHDL, Verilog, MATLAB, Labview), тестирование и измерения, калькуляторы, новости, книги, загрузки и многое другое.
Сайт RF Wireless World охватывает ресурсы по различным темам, таким как RF, беспроводная связь, vsat, спутник, радар, волоконная оптика, микроволновая печь, wimax, wlan, zigbee, LTE, 5G NR, GSM, GPRS, GPS, WCDMA, UMTS, TDSCDMA, bluetooth, Lightwave RF, z-wave, Интернет вещей (IoT), M2M, Ethernet и т. Д. Эти ресурсы основаны на стандартах IEEE и 3GPP.Он также имеет академический раздел, который охватывает колледжи и университеты по инженерным дисциплинам и MBA.
Статьи о системах на основе Интернета вещей
Система обнаружения падений для пожилых людей на основе Интернета вещей : В статье рассматривается архитектура системы обнаружения падений, используемой для пожилых людей.
В нем упоминаются преимущества или преимущества системы обнаружения падений Интернета вещей.
Читать дальше➤
Также обратитесь к другим статьям о системах на основе Интернета вещей следующим образом:
• Система чистоты туалетов самолета.
• Система измерения столкновения
• Система отслеживания скоропортящихся продуктов и овощей
• Система помощи водителю
• Система умной торговли
• Система мониторинга качества воды.
• Система Smart Grid
• Система умного освещения на базе Zigbee
• Система интеллектуальной парковки на основе Zigbee.
• Система интеллектуальной парковки на основе LoRaWAN
RF Статьи о беспроводной связи
В этом разделе статей представлены статьи о физическом уровне (PHY), уровне MAC, стеке протоколов и сетевой архитектуре на основе WLAN, WiMAX, zigbee, GSM, GPRS, TD-SCDMA, LTE, 5G NR, VSAT, Gigabit Ethernet на основе IEEE / 3GPP и т. Д. .стандарты. Он также охватывает статьи, относящиеся к испытаниям и измерениям, по тестированию на соответствие, используемым для испытаний устройств на соответствие RF / PHY. УКАЗАТЕЛЬ СТАТЬИ ДЛЯ ССЫЛКИ >>.
Физический уровень 5G NR : Обработка физического уровня для канала 5G NR PDSCH и канала 5G NR PUSCH рассмотрена поэтапно. Это описание физического уровня 5G соответствует спецификациям физического уровня 3GPP. Читать дальше➤
Основы повторителей и типы повторителей : В нем объясняются функции различных типов ретрансляторов, используемых в беспроводных технологиях.Читать дальше➤
Основы и типы замирания : В этой статье рассматриваются мелкомасштабные замирания, крупномасштабные замирания, медленные, быстрые и т. Д., Используемые в беспроводной связи. Читать дальше➤
Архитектура сотового телефона 5G : В этой статье рассматривается блок-схема сотового телефона 5G с внутренними модулями 5G Архитектура сотового телефона. Читать дальше➤
Основы помех и типы помех: В этой статье рассматриваются помехи в соседнем канале, помехи в одном канале, ЭМ помехи, ICI, ISI, световые помехи, звуковые помехи и т. Д.Читать дальше➤
5G NR Раздел
В этом разделе рассматриваются функции 5G NR (New Radio), нумерология, диапазоны, архитектура, развертывание, стек протоколов (PHY, MAC, RLC, PDCP, RRC) и т. Д.
5G NR Краткий указатель ссылок >>
• Мини-слот 5G NR
• Часть полосы пропускания 5G NR
• 5G NR CORESET
• Форматы DCI 5G NR
• 5G NR UCI
• Форматы слотов 5G NR
• IE 5G NR RRC
• 5G NR SSB, SS, PBCH
• 5G NR PRACH
• 5G NR PDCCH
• 5G NR PUCCH
• Эталонные сигналы 5G NR
• 5G NR m-последовательность
• Золотая последовательность 5G NR
• 5G NR Zadoff Chu Sequence
• Физический уровень 5G NR
• Уровень MAC 5G NR
• Уровень 5G NR RLC
• Уровень 5G NR PDCP
Учебные пособия по беспроводным технологиям
В этом разделе рассматриваются учебные пособия по радиочастотам и беспроводной связи.Он охватывает учебные пособия по таким темам, как сотовая связь, WLAN (11ac, 11ad), wimax, bluetooth, zigbee, zwave, LTE, DSP, GSM, GPRS, GPS, UMTS, CDMA, UWB, RFID, радар, VSAT, спутник, WLAN, волновод, антенна, фемтосота, тестирование и измерения, IoT и т. Д. См. УКАЗАТЕЛЬ >>
Учебное пособие по 5G — В этом учебном пособии по 5G также рассматриваются следующие подтемы по технологии 5G:
Учебное пособие по основам 5G
Полосы частот
руководство по миллиметровым волнам
Волновая рама 5G мм
Зондирование волнового канала 5G мм
4G против 5G
Тестовое оборудование 5G
Сетевая архитектура 5G
Сетевые интерфейсы 5G NR
канальное зондирование
Типы каналов
5G FDD против TDD
Разделение сети 5G NR
Что такое 5G NR
Режимы развертывания 5G NR
Что такое 5G TF
В этом руководстве GSM рассматриваются основы GSM, сетевая архитектура, сетевые элементы, системные спецификации, приложения,
Типы пакетов GSM, структура кадров GSM или иерархия кадров, логические каналы, физические каналы,
Физический уровень GSM или обработка речи, вход в сеть мобильного телефона GSM, установка вызова или процедура включения питания,
MO-вызов, MT-вызов, VAMOS, AMR, MSK, модуляция GMSK, физический уровень, стек протоколов, основы мобильного телефона,
Планирование RF, нисходящая линия связи PS и восходящая линия связи PS.
➤Подробнее.
LTE Tutorial , охватывающий архитектуру системы LTE, охватывающий основы LTE EUTRAN и LTE Evolved Packet Core (EPC). Он обеспечивает связь с обзором системы LTE, радиоинтерфейсом LTE, терминологией LTE, категориями LTE UE, структурой кадра LTE, физическим уровнем LTE, Стек протоколов LTE, каналы LTE (логические, транспортные, физические), пропускная способность LTE, агрегация несущих LTE, передача голоса по LTE, расширенный LTE, Поставщики LTE и LTE vs LTE продвинутые.➤Подробнее.
RF Technology Stuff
Эта страница мира беспроводной радиосвязи описывает пошаговое проектирование преобразователя частоты RF на примере преобразователя RF UP диапазона 70 МГц в C.
для микрополосковой платы с использованием дискретных радиочастотных компонентов, а именно. Смесители, гетеродин, MMIC, синтезатор, опорный генератор OCXO,
колодки аттенюатора. ➤Подробнее.
➤Проектирование и разработка радиочастотных трансиверов
➤Конструкция RF фильтра
➤VSAT Система
➤Типы и основы микрополосковой печати
➤Основы работы с волноводом
Секция испытаний и измерений
В этом разделе рассматриваются контрольно-измерительные ресурсы, испытательное и измерительное оборудование для тестирования DUT на основе
Стандарты WLAN, WiMAX, Zigbee, Bluetooth, GSM, UMTS, LTE.ИНДЕКС испытаний и измерений >>
➤ Система PXI для T&M.
➤ Генерация и анализ сигналов
➤Измерения слоя PHY
➤Тест устройства на соответствие WiMAX
➤ Тест на соответствие Zigbee
➤ Тест на соответствие LTE UE
➤Тест на соответствие TD-SCDMA
Волоконно-оптическая технология
Оптоволоконный компонент , основы, включая детектор, оптический соединитель, изолятор, циркулятор, переключатели, усилитель,
фильтр, эквалайзер, мультиплексор, разъемы, демультиплексор и т. д.Эти компоненты используются в волоконно-оптической связи.
Оптические компоненты INDEX >>
➤Учебник по оптоволоконной связи
➤APS в SDH
➤SONET основы
➤SDH Рамочная конструкция
➤SONET против SDH
Поставщики, производители радиочастотных беспроводных устройств
Сайт RF Wireless World охватывает производителей и поставщиков различных компонентов, систем и подсистем RF для ярких приложений, см. ИНДЕКС поставщиков >>.
Поставщики радиочастотных компонентов, включая радиочастотный изолятор, радиочастотный циркулятор, радиочастотный смеситель, радиочастотный усилитель, радиочастотный адаптер, радиочастотный разъем, радиочастотный модулятор, радиочастотный трансивер, PLL, VCO, синтезатор, антенну, генератор, делитель мощности, сумматор мощности, фильтр, аттенюатор, диплексор, дуплексер, микросхема резистора, микросхема конденсатора, микросхема индуктивности, ответвитель, оборудование ЭМС, программное обеспечение для проектирования радиочастот, диэлектрический материал, диод и т. д.Производители RF компонентов >>
➤Базовая станция LTE
➤RF Циркулятор
➤RF Изолятор
➤Кристаллический осциллятор
MATLAB, Labview, встроенные исходные коды
Раздел исходного кода RF Wireless World охватывает коды, связанные с языками программирования MATLAB, VHDL, VERILOG и LABVIEW.
Эти коды полезны для новичков в этих языках.
ИНДЕКС ИСХОДНОГО КОДА >>
➤3-8 декодер кода VHDL
➤Код MATLAB для дескремблера
➤32-битный код ALU Verilog
➤T, D, JK, SR триггеры labview коды
* Общая информация о здоровье населения *
Выполните эти пять простых действий, чтобы остановить коронавирус (COVID-19).
ДЕЛАТЬ ПЯТЬ
1. РУКИ: Часто мойте их
2. КОЛЕНО: Откашляйтесь
3. ЛИЦО: Не трогай его
4. НОГИ: держитесь на расстоянии более 3 футов (1 м) друг от друга
5. ЧУВСТВОВАТЬ: Болен? Оставайся дома
Используйте технологию отслеживания контактов >>, соблюдайте >> рекомендации по социальному дистанцированию и установить систему видеонаблюдения >> чтобы спасти сотни жизней. Использование концепции телемедицины стало очень популярным в таким странам, как США и Китай, остановить распространение COVID-19, поскольку это заразное заболевание.
RF Беспроводные калькуляторы и преобразователи
Раздел «Калькуляторы и преобразователи» охватывает ВЧ-калькуляторы, беспроводные калькуляторы, а также преобразователи единиц.
Сюда входят беспроводные технологии, такие как GSM, UMTS, LTE, 5G NR и т. Д.
СПРАВОЧНЫЕ КАЛЬКУЛЯТОРЫ Указатель >>.
➤ Калькулятор пропускной способности 5G NR
➤5G NR ARFCN против преобразования частоты
➤Калькулятор скорости передачи данных LoRa
➤LTE EARFCN для преобразования частоты
➤ Калькулятор антенны Яги
➤ Калькулятор времени выборки 5G NR
IoT-Интернет вещей Беспроводные технологии
Раздел IoT охватывает беспроводные технологии Интернета вещей, такие как WLAN, WiMAX, Zigbee, Z-wave, UMTS, LTE, GSM, GPRS, THREAD, EnOcean, LoRa, SIGFOX, WHDI, Ethernet,
6LoWPAN, RF4CE, Bluetooth, Bluetooth Low Power (BLE), NFC, RFID, INSTEON, X10, KNX, ANT +, Wavenis, Dash7, HomePlug и другие.Он также охватывает датчики Интернета вещей, компоненты Интернета вещей и компании Интернета вещей.
См. Главную страницу IoT >> и следующие ссылки.
➤ НИТЬ
➤EnOcean
➤Учебник по LoRa
➤Учебник по SIGFOX
➤WHDI
➤6LoWPAN
➤Zigbee RF4CE
➤NFC
➤Lonworks
➤CEBus
➤UPB
СВЯЗАННЫЕ ЗАПИСИ
RF Wireless Учебники
Датчики разных типов
Поделиться страницей
Перевести страницу
.