Датчики частоты вращения двигателя
Применения
Датчики частоты вращения двигателя используются в системах управления двигателем для:
- измерения числа оборотов двигателя
- определения положения коленчатого вала (положение поршня двигателя)
Число оборотов рассчитывается по интервалу между сигналами датчика скорости вращения.
Индуктивные датчики скорости вращения
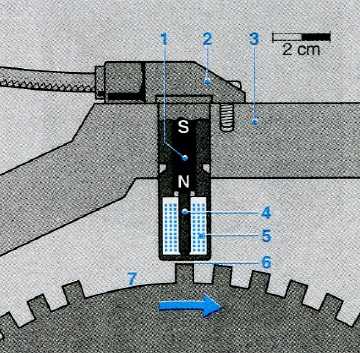
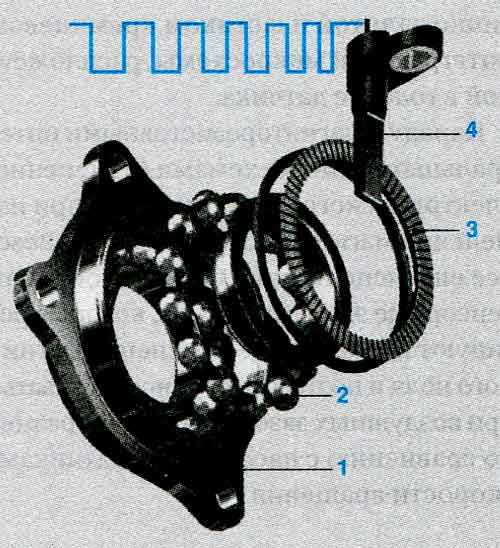
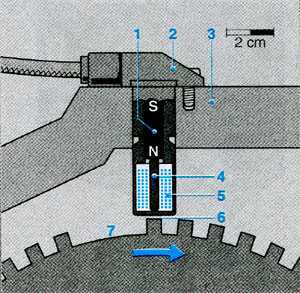
Рис. Индуктивный датчик скорости вращения (конструкция):
- Постоянный магнит
- Корпус датчика
- Корпус двигателя
- Полюсный контактный штифт
- Обмотка
- Воздушный зазор
- Зубчатое колесо с точкой отсчета
Конструкция и принцип действия Датчик монтируется прямо напротив ферромагнитного зубчатого колеса (поз. 7) с определенным воздушным зазором. Он имеет сердечник из магнитомягкой стали (полюсный контактный штифт, поз. 4) с обмоткой (5). Полюсный контактный штифт соединен с постоянным магнитом (1). Магнитное поле распространяется через полюсный контактный штифт, проходя в зубчатое колесо. Магнитный поток, проходящий через катушку, зависит от того, попадает ли расположение датчика напротив впадины или зуба колеса. Зубец соединяет в пучок магнитный поток рассеяния, исходящий от магнита. Через катушку происходит усиление сетевого потока. Впадина, наоборот, ослабляет магнитный поток. Эти изменения магнитного потока при вращении зубчатого колеса индуцируют в катушке синусоидальное выходное напряжение, пропорциональное скорости изменения и числу оборотов двигателя. Амплитуда переменного напряжения интенсивно возрастает с увеличением числа оборотов (несколько мВ… > 100 В). Достаточная амплитуда присутствует, начиная с минимального числа оборотов от 30 в минуту.
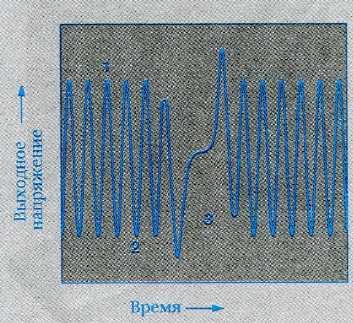
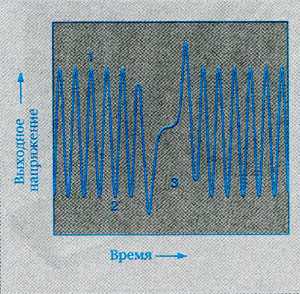
Рис. Сигнал индуктивного датчика скорости вращения двигателя:
- Зуб
- Впадина
- Опорный сигнал
Активные датчики скорости вращения
Активные датчики скорости вращения работают по магнитостатическому принципу. Амплитуда выходного сигнала не зависит от числа оборотов. Благодаря этому можно измерять скорость вращения и при очень низком числе оборотов (квазистатическое определение числа оборотов).
Дифференциальный датчик Холла
На проводящей ток пластинке, по которой вертикально проходит магнитная индукция В, поперечно к направлению тока можно снимать напряжение UH (напряжение Холла), пропорциональное направлению тока.
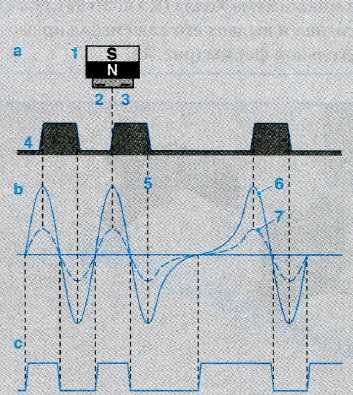
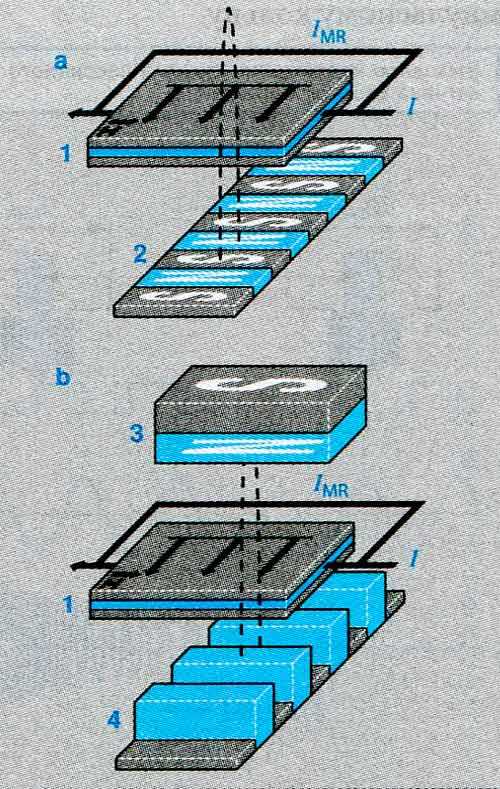
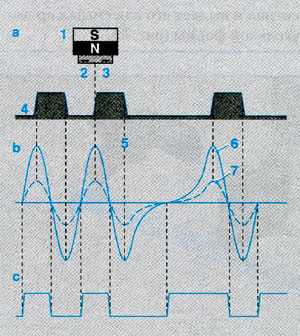
Рис. Принцип работы дифференциального датчика Холла:
- а Расположение датчика
- b Сигнал датчика Холла
- большая амплитуда при маленьком воздушном зазоре
- маленькая амплитуда при большом воздушном зазоре
- с Выходной сигнал
- Магнит
- Датчик Холла 1
- Датчик Холла 2
- Зубчатое колесо
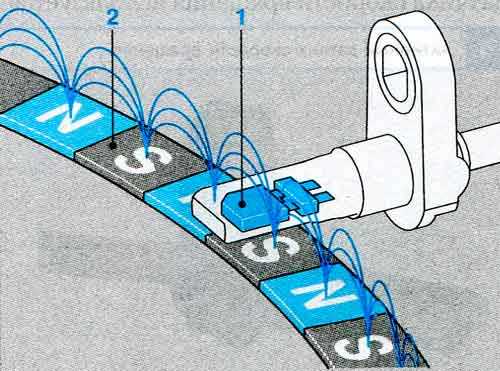
В дифференциальном датчике Холла магнитное поле вырабатывается постоянным магнитом (поз. 1). Между магнитом и импульсным кольцом (4) находятся два сенсорных элемента Холла (2 и 3). Магнитный поток, который проходит сквозь них, зависит от того, находится ли датчик скорости вращения напротив зубца или паза. Благодаря созданию разности сигналов от обоих датчиков достигается снижение магнитных сигналов возмущения и улучшенное соотношение сигнала/ шума. Боковые поверхности сигнала датчика могут обрабатываться без оцифровывания непосредственно в блоке управления.
Вместо ферромагнитного зубчатого колеса используются также многополюсные колеса. Здесь на немагнитном металлическом носителе установлен намагничивающийся пластик, который попеременно намагничивается. Эти северные и южные полюсы принимают на себя функцию зубцов колеса.
AMR-датчики
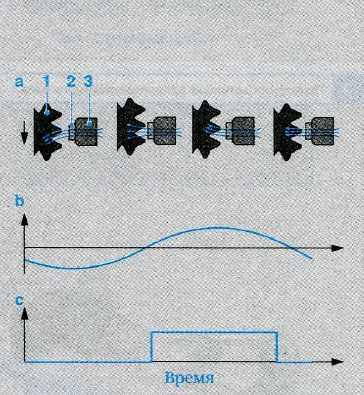
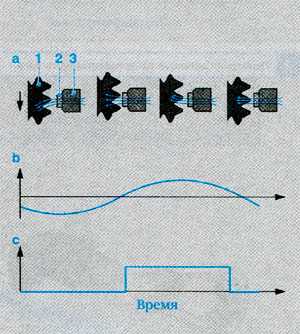
Рис. Принцип определения числа оборотов с помощью датчика AMP:
- а Размещение
- в различные моменты времени
- b Сигнал датчика AMP
- с Выходной сигнал
- Импульсное (активное) колесо
- Сенсорный элемент
- Магнит
Электрическое сопротивление магнито-резистивного материала (AMP, анизотропный магниторезистивный) является анизотропным. Это означает, что оно зависит от направления магнитного поля, которое на него воздействует. Это свойство используется в AMP-датчике. Датчик находится между магнитом и импульсным кольцом. Линии поля изменяют свое направление, когда вращается импульсное (активное) колесо. В результате формируется синусоидальное напряжение, которое усиливается в схеме обработки данных и преобразуется в сигнал прямоугольной формы.
GMR-датчики
Усовершенствование активных датчиков скорости вращения отражено в использовании технологии GMR (ГМР) (Giant Magneto-Resistance). По причине высокой чувствительности по сравнению с датчиками AMP здесь возможны большие воздушные зазоры, за счет чего предполагаются использования в трудных сферах применения. Более высокая чувствительность производит меньше шумов фронта сигнала.
В ГМР-датчиках возможны также все двухпроводные порты, используемые ранее в датчиках скорости вращения Холла.
ustroistvo-avtomobilya.ru
26. Датчики частоты вращения
26. Датчики частоты вращения
Датчики частоты вращения служат для определения числа оборотов вала двигателя за единицу времени и применяются в регулируемых приводных системах.
Датчики частоты вращения используются в тахометрах — приборах, измеряющих частоту вращения или угловую скорость вращающихся деталей. Тахометры бывают магнитные, вибрационные, часовые интегрирующие, стробоскопические, электронные интегрирующие, магнитно-индукционные, магнитно-электрические, частотно-импульсные, ферродинамические и другие.
В промышленности в настоящее время широкое распространение получили магнитно-индукционные датчики частоты вращения (тахогенераторы), генерирующие электрические импульсы напряжения приблизительно синусоидальный формы. Частота этого сигнала пропорциональна частоте вращения вала двигателя, где установлен индуктор.
Конструкция и принцип действия бесконтактного магнитно-индукционного датчика частоты вращения
Пример конструкции датчика. Магнитно-индукционный датчик состоит из катушки индуктивности, внутри которой находится сердечник из мягкой стали, соединенный с постоянным магнитом. Стальной сердечник расположен через небольшой воздушный зазор прямо над кромкой ферромагнитного зубчатого кольца (зубчатки), находящегося в магнитном поле постоянного магнита. Если прямо напротив датчика попадает зуб кольца, то он концентрирует магнитное поле и усиливает поток магнитной индукции в катушке, а если напротив датчика становится выемка зубчатки, то магнитный поток ослабевает. Такие два состояния датчика постоянно чередуются при вращении импульсной зубчатки вместе с валом, частота вращения которого, собственно говоря, и является измеряемой характеристикой. В катушке наводятся импульсы напряжения переменного тока, частота которых свидетельствует о частоте вращения вала.
Назначение. Бесконтактные индуктивные датчики частоты вращения широко применяются для контроля и регистрации частоты вращения различных двигателей, в т.ч. на транспортных средствах.
Тахогенераторы
Типичный тахогенератор представляет собой электрическую машину малой мощности, которая преобразует механическое вращение в электрический сигнал. Конструкция асинхронного тахогенератора ничем не отличается от асинхронного двигателя с полым немагнитным ротором. Подобно двигателю, одна из обмоток статора подключается к сети переменного тока (обмотка возбуждения), а другая — генераторная обмотка — служит для снятия выходного напряжения. Обмотки асинхронного генератора расположены под углом 90º друг к другу. Мощность выходного сигнала тахогенератора может достигать нескольких ватт. Помимо асинхронных, выпускаются синхронные тахогенераторы и тахогенераторы постоянного тока.
Пример тахогенератора
Тахогенератор GT 3 пр-ва компании Huebner, Германия
Основные технические характеристики
Выходное напряжение: 5 мВ/об/мин
Температурный коэффициент: -0,035 %/ºС
неравномерность характеристики: не более 1,2 %
Постоянная времени: 2 мкс
Мощность: 0,025 Вт
Диапазон рабочих температур: от -30 ºС до +130 ºС
Диаметр полого вала: 6 мм
Наибольшая частота вращения: 10000 об/мин
Момент инерции: 9 гсм2
Масса ротора: прибл. 20 г
Диаметр корпуса: 34 мм
Класс защиты: IP00; IP54
Тахогенератор постоянного тока — это машина постоянного тока с независимым возбуждением или возбуждением постоянными магнитами, работающая в генераторном режиме. По конструкции он почти не отличается от машин постоянного тока.
Тахогенераторы постоянного тока служат для измерения частоты вращения по значению выходного напряжения, а также для получения электрических сигналов, пропорциональных частоте вращения вала в схемах автоматического регулирования.
Основными требованиями, предъявляемыми к тахогенераторам, являются: а) линейность выходной характеристики; б) большая крутизна выходной характеристики; в) малое влияние на выходную характеристику изменения температуры окружающей среды и нагрузки; г) минимум пульсаций напряжения на коллекторе.
На. рис. 9.5 показаны принципиальные схемы тахогенераторов постоянного тока с электромагнитным возбуждением (а) и возбуждением постоянными магнитами (б).
(1)
где rа — сопротивление обмотки якоря, Ом; Rн — внутреннее сопротивление прибора, подключенного к тахогенератору, Ом.
Из (1) следует, что чем больше сопротивление прибора Rн тем больше крутизна выходной характеристики Сu. Наибольшая крутизна у выходной характеристики, соответствующей режиму холостого хода тахогенератора, когда обмотка якоря разомкнута» (RH = ∞).
С ростом тока нагрузки (уменьшением RH) крутизна выходной характеристики уменьшается (рис. 9.6, а). У современных тахогенераторов постоянного тока Сu = (6÷260).10¯³В/(об/мин), что превышает крутизну асинхронных тахогенераторов.

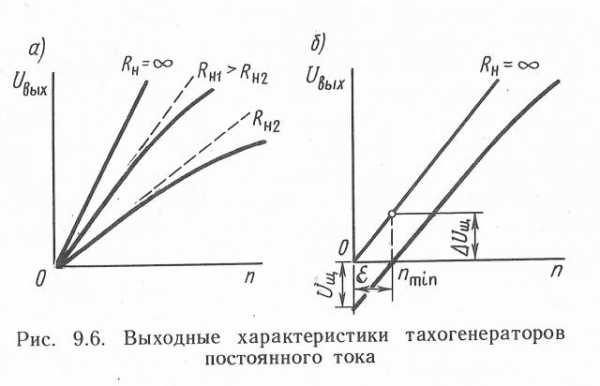
Выходная характеристика тахогенератора постоянного тока — прямая линия. Однако опыт показывает, что выходная характеристика прямолинейна только в начальной части (при малых относительных частотах вращения), а с ростом частоты вращения она становится криволинейной (рис. 9.6, а). Криволинейность характеристики усиливается при уменьшении сопротивления нагрузки RH и увеличении частоты вращения n. Это объясняется размагничивающим действием реакции якоря в тахогенераторе. Для уменьшения криволинейности выходной характеристики не следует использовать тахогенератор на его предельных частотах вращения и применять в качестве нагрузки приборы с малым внутренним сопротивлением.
studfile.net
Датчики частоты вращения колеса
Датчики частоты вращения колеса
Применение
Датчики частоты вращения колеса служат для определения скорости вращения колес автомобиля (числа оборотов колеса). Сигналы частоты вращения передаются по кабелю в блок управления ABS, ASR или ESP автомобиля, который индивидуально управляет силой торможения каждого колеса. Этот контур регулирования предотвращает блокирование (при наличии ABS) или прокручивание колес (при наличии ASR или ESP) и гарантирует устойчивость и управляемость автомобиля. Системы навигации также нуждаются в сигналах частоты вращения колеса, чтобы рассчитывать пройденный путь (например, в туннелях или при отсутствии сигналов спутника).
Конструкция и принцип действия
Сигналы для датчика частоты вращения колеса формируются с помощью стального импульсного датчика, жестко соединенного со ступицей колеса (для пассивных датчиков), или мультиполюсного магнитно-импульсного датчика (для активных датчиков). Этот импульсный датчик имеет такую же скорость вращения, что и колесо, и проходит бесконтактно чувствительную зону головки датчика. Датчик «считывает» без прямого контакта через воздушный зазор величиной до 2 мм (рис. 2).
Воздушный зазор (с небольшими допусками) служит для того, чтобы обеспечить процесс получения сигнала без помех. Возможные помехи, такие как колебания, вибрации, температура, влажность, условия установки на колесе и пр. исключаются.
| Рисунок № 1 Пассивные (индуктивные) датчики частоты вращения | |
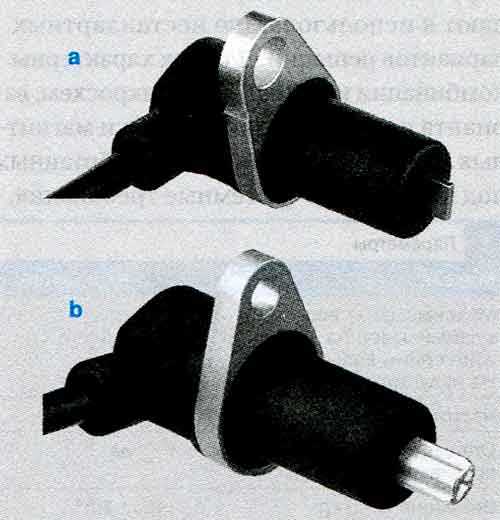 |
а Резцовый контактный штифт (плоский индуктор) b Ромбовидный контактный штифт (крестовидный индуктор) |
С 1998 г. вместо пассивных (индуктивных) датчиков частоты вращения в новейших разработках используются практически исключительно активные датчики частоты вращения колеса. Пассивные (индуктивные) датчики частоты вращения состоят из постоянного магнита (рис. 2, поз. 1) и соединенного с ним магнитомягкого полюсного контактного штифта (3), который вставлен в катушку (2). Таким образом, создается постоянное магнитное поле.
Полюсный контактный штифт находится прямо над импульсным колесом (4), зубчатым колесом, жестко соединенным со ступицей. Во время вращения импульсного колеса существующее постоянное магнитное поле «нарушается» из-за постоянной смены зубца и впадины. За счет этого изменяется магнитный поток, проходящий через полюсный контактный штифт, а вместе с ним и магнитный поток, проходящий через витки катушки. Смена магнитных полей индуцирует в обмотке переменное напряжение, которое снимается на концах обмотки.
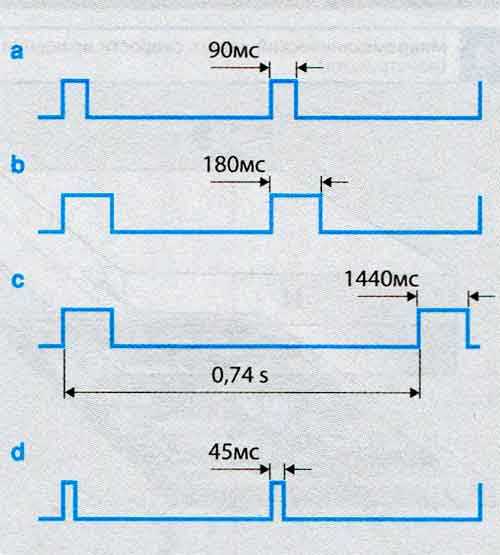
Как частота, так и амплитуда переменного напряжения пропорциональны числу оборотов колеса (скорости вращения) (рис. 3). Когда колесо не движется, индуцируемое напряжение также равно нулю.
Форма зубцов, воздушный зазор, крутизна скачка напряжения и входная чувствительность прибора управления определяют минимальную измеряемую скорость автомобиля, а также минимально возможную для использования ABS чувствительность срабатывания и скорость переключения.
| Рисунок № 2 Чертеж принципа действия пасивного датчика скорости вращения | |
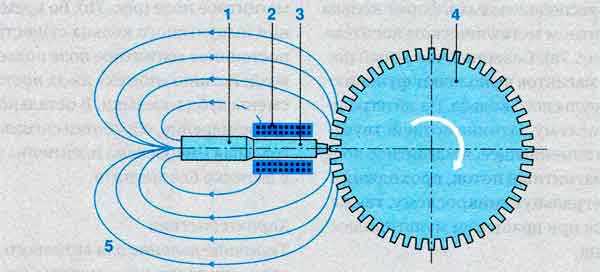 |
1 Постоянный магнит |
Поскольку условия монтажа на колесе не везде одинаковые, существуют различные формы полюсных контактных штифтов и различные варианты монтажа. Наиболее распространены резцовый полюсный контактный штифт (рис. 1а, также называемый плоским индуктором) и ромбовидный контактный штифт (рис. lb, также называемый крестовидным индуктором). Оба полюсных контактных штифта при монтаже должны быть точно направлены к импульсному кольцу.
| Рисунок № 3 Выходное напряжение сигнала пассивного датчика скорости вращения | |
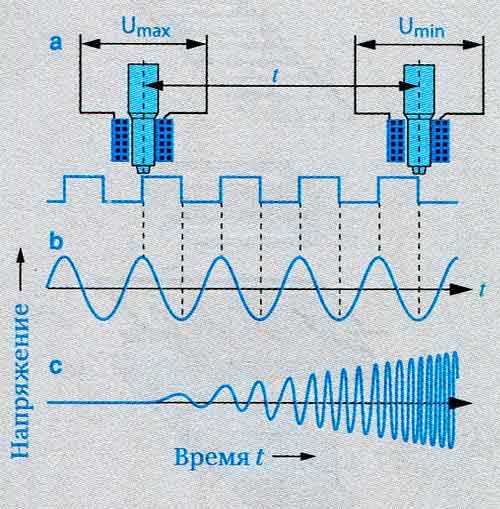 |
а Пассивный датчик скорости вращения с импульсным кольцом b Сигнал датчика при постоянной скорости вращения колеса с Сигнал датчика при возрастающей скорости вращения колеса |
Активный датчик скорости вращения
Сенсорные элементы
В современных тормозных системах используются практически исключительно активные датчики скорости вращения (рис. 4). Обычно они состоят из герметично залитой пластиком кремниевой интегральной микросхемы, распложенной в головке датчика.
Наряду с магниторезистивными интегральными микросхемами (изменение электрического сопротивления при изменении магнитного поля) фирма «Bosch» все еще использует в больших объемах сенсорные элементы Холла, которые реагируют на малейшие изменения магнитного поля и поэтому могут использоваться при воздушных зазорах большего размера по сравнению с пассивными датчиками скорости вращения.
Активное (импульсное) кольцо
В качестве импульсного кольца активного датчика скорости вращения используется мультиполюснное колесо. Речь идет о поочередно расположенных постоянных магнитах, расположенных в форме кольца на немагнитном металлическом носителе (рис. 6 и рис. 7а). Северный и южный полюса этих магнитов выполняют функцию зубцов импульсного кольца. На интегральную микросхему датчика воздействует постоянно изменяющееся магнитное поле. Поэтому магнитный поток, проходящий через интегральную микросхему, также изменяется при вращении мультиполюсного кольца.
| Рисунок № 4 Активный датчик скорости вращения | |
 |
В качестве альтернативы мультиполюсному кольцу можно использовать стальное зубчатое колесо. В этом случае на интегральную микросхему Холла устанавливается магнит, вырабатывающий постоянное магнитное поле (рис. 7b). Во время вращения импульсного кольца существующее постоянное магнитное поле подвергается воздействию «помех» из-за постоянной смены зубца-выемки. В остальном принцип измерения, обработки сигнала и интегральная микросхема идентичны таковым в датчике без магнита.
| Рисунок № 5 Экспозиционный чертеж с мультиполюсным импульсным датчиком | |
 |
1 Ступица колеса |
Характеристики
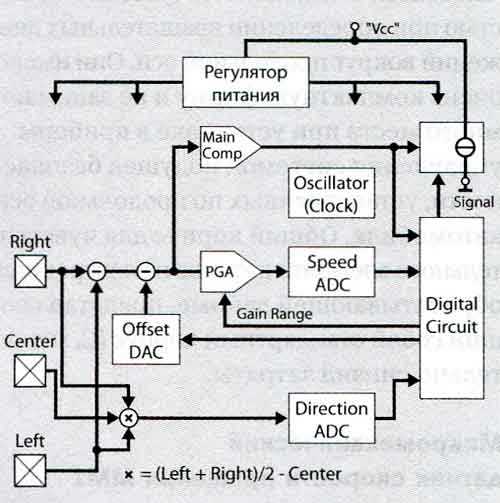
Типичное явление для активного датчика скорости вращения — интеграция измерительного элемента Холла, усилителя сигнала и подготовки сигнала в интегральной микросхеме (рис. 8). Данные о скорости вращения передаются в виде подводимого тока в форме прямоугольных импульсов (рис. 9). Частота импульсов тока пропорциональна числу оборотов колеса, а считывание показаний возможно почти до остановки колеса (0,1 км/ч).
| Рисунок № 6 тивный датчик скорости вращения в разрезе | |
 |
1 Сенсорный элемент |
| Рисунок № 7 Чертеж принципа работы при определении скорости вращения | |
 |
а Интегральная микросхема Холлас мультиполюсным импульсным датчиком b Интегральная микросхема Холла со стальным 1 Сенсорный элемент |
Питающее напряжение находится в диапазоне между 4,5 и 20 Вольт. Уровень прямоугольного выходного сигнала составляет 7 мА (низкий) и 14 мА (высокий). При такой форме передачи цифровых сигналов, например, индуктивное напряжение помех является неэффективным по сравнению с пассивным индуктивным датчиком. Связь с блоком управления осуществляется двухпроводным кабелем.
| Рисунок № 8 Блок-схема интегральной микросхемы Холла |
 |
Компактная конструкция и небольшой вес позволяют монтировать активный датчик скорости вращения на подшипнике колеса или в нем (рис. 10). Для этого подходят различные стандартные формы головки датчика.
| Рисунок № 9 Преобразование сигнала в интегральной микросхеме Холла | |
 |
а Исходный сигнал b Выходной сигнал 0S1 Верхний порог переключения US1Нижний порог переключения |
| Рисунок № 10 Подшипник колеса с датчиков скорости вращения | |
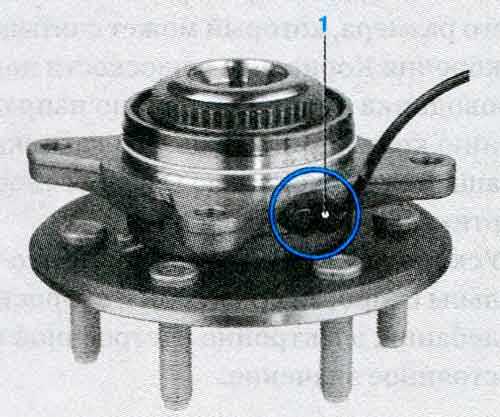 |
1 Датчик скорости вращения |
Цифровая обработка сигнала позволяет передавать кодированную дополнительную информацию с помощью широтноимпульсно-модулируемого выходного сигнала (рис. 11).
Определение направления вращения колес: это особенно необходимо для функции «Hill Hold Control», предотвращающей откат автомобиля назад во время подъема на гору. Определение направления вращения также используется для навигации автомобиля.
Определение состояния остановки: эти данные также обрабатываются в функции «Hill Hold Control». Дальнейшая обработка данных входит в раздел самодиагностики.
Качество сигнала датчика: можно передавать данные о качестве сигнала датчика. Посредством этого водитель в случае ошибки может получить информацию о необходимости своевременно обратиться в сервисную службу.
|
Рисунок № 11 Кодированная передача данных с помощью широтно-импульсно-модулируемых сигналов |
|
 |
а Сигнал скорости при движении назад |
sto-universal.org.ua
Набор инструментов для контроля частоты от НПК ТЕКО в Челябинске

В рабочей практике происходит множество процессов, которые требуют подсчета частоты вращения или следования объектов. Например, это обязательный контроль частоты вала ленточного транспортера, привода крыльчатки бетономешалки, частоты следования ковшей нории, частоты вращения шестерни коробки передач.
От выполнения этих задач зависит производительность оборудования, поэтому Вы стараетесь выбирать надежные и долговечные инструменты для их решения:
- проверенные опытным путем
- с гарантией качества
- по выгодным, стабильным ценам
- и с возможностью срочной/бесплатной доставки.
В «ТЕКО» Вы получите полный спектр выгод и широкий выбор инструментов для подсчета частоты.
Индуктивные датчики для контроля частоты вращения приводного барабана конвейера
В случае провисания или обрыва конвейерной ленты, нарушается технологический процесс. Этого можно избежать, используя индуктивный датчик контроля минимальной скорости. После установки датчика на приводной барабан конвейера, Ваша система автоматически отслеживает частоту его оборотов, тем самым держит под контролем состояние ленты транспортера. В случае неисправности (снижении частоты ниже установленного минимума) на устройство управления будет подан сигнал о неполадках в работе системы.
С помощью подстроечного резистора на датчике устанавливается минимальное пороговое значение частоты вращения приводного барабана (скорости движения ленты). Для того, чтобы датчик не выдал ложный сигнал по причине инерции конвейера, в нем предусмотрена величина задержки срабатывания при первоначальном запуске двигателя для разгона. В типовых датчиках она достигает 9 секунд, при необходимости — регулируется. Диапазон регулируемых частот: 0,1…2,5 Гц; 2…50 Гц
Вариант успешного применения датчика контроля минимальной скорости: контроль исправности грохота. Датчик запрограммирован на определенную частоту прохождения грохота мимо чувствительного элемента. И в случае, если частота меняется, датчик сигнализирует о сбое в работе грохота (из-за обрыва троса, выхода из строя двигателя или другой возможной причины).
Гарантия — 24 месяца
Контроль частоты в специфических условиях, для индивидуальных обстоятельств
При необходимости, любые типы датчиков «ТЕКО» могут выступать в качестве датчиков минимальной скорости: индуктивные, емкостные, оптические и магниточувствительные. Для этого их достаточно подключить к блоку контроля частоты CF1, который контролирует частоту импульсов входного сигнала и формирует сигнал на выходе при достижении частотой установленного порогового значения.
Применение блока позволяет контролировать частоту следования объектов во взрывоопасных средах: в соединении со взрывобезопасными датчиками и блоком сопряжения.
Для контроля объектов в «узких» местах конструкции, где крупногабаритный датчик разместить невозможно, возможно применение миниатюрных датчиков с блоком контроля частоты.
Гарантия — 12 месяцев
Датчики скорости (датчик частоты вращения) на эффекте Холла
Для определения частоты вращения вала в коробках передач и подачи сигнала на тахометр и тахограф мы рекомендуем датчики частоты ВТИЮ.7019 и ВТИЮ.7030.
Контроль частоты вращения механизмов широко востребован для определения скорости движения автотранспорта, мониторинга работы автокрана и для отлаженной работы оборудования, в составе которого присутствуют вращающиеся приводные устройства (от сепаратора до грохота).
Измерение частоты вращения с помощью датчиков «ТЕКО» осуществляется бесконтактно и не влияет на срок службы оборудования.
Датчики частоты ВТИЮ.7019 и ВТИЮ.7030. успешно применяются на автомобилях производства КАМАЗ, МАЗ и других известных производителей.
Гарантия — 24 месяца
Исправность трансмиссии всегда под контролем индуктивных датчиков
Регулярная оценка рабочего состояния трансмиссии позволяет Вам избежать аварий, простоев и непредвиденных ремонтных работ. Специально для наблюдения за частотой вращения элементов трансмиссии предназначен датчик ВТИЮ. 7040. Частота вращения контролируемых элементов может составлять от 0 до 6000 Гц. При необходимости мы разрабатываем датчики под индивидуальные габариты.
Датчик готовится к выпуску.
Контролируйте частоту с помощью фотоэлектрических преобразователей
Определяйте частоту вращающегося объекта с помощью фотоэлектрического преобразователя «ТЕКО» OT NK21A-311P-11-L-F.
Принцип его работы в том, чтобы контролируемый объект или его деталь прерывала световой поток, излучаемый датчиком. Прерывание преобразуется в импульс на выходе датчика, который вы можете использовать для контроля частоты вращающегося диска или любой другой детали, совершающей обороты. Одному пересечению луча соответствует один выходной импульс, формируемый по окончанию прохождения затеняющего предмета.
Гарантия — 24 месяца
Мониторинг аварийных ситуаций с помощью тахометра
Для подсчёта и индикации количества действий в единицу времени, а также для выдачи управляющего сигнала при достижении заданной установки частоты предлагаем использовать тахометр ТХ1 РЗЩ.
Помимо постоянного мониторинга аварийных ситуаций (в системах контроля частоты вращения механизмов) Вы получаете:
- Универсальность/взаимозаменяемость входных портов;
- Функция «Слежение», управляющая выходным реле;
- Непрерывная и динамичная индикация;
- Программируемый коэффициент деления частоты входного сигнала;
- Детектирование направления вращения при использовании двух сигналов;
- Встроенный источник питания.
Гарантия на прибор — 24 месяца
Контроль частоты вращения зубчатого колеса обычным индуктивным датчиком
Задачу контроля частоты вращения зубчатого колеса можно решить с помощью обычного индуктивного датчика. Для этого нужно знать максимальную рабочую частоту оперирования датчика, частоту вращения зубчатого колеса и число его зубьев.
Для правильного определения рабочей частоты датчика необходимо определить частоту воздействия на него зубчатого колеса.
Решение возможно с помощью простой формулы:
m x n / 60= ƒ (Гц)
где m — число зубьев, а n — частота вращения об/мин.
Например, ВТИЮ.1605.
Ту же задачу с помощью индуктивных датчиков «ТЕКО» можно решать в специфических условиях эксплуатации. Например, возможно внедрение индуктивного датчика ISBm WC48S8-31N-1,5-250-LZR14-1H-V в редуктор для контроля частоты вращения вала. Датчик безотказно и долго работает в условиях непрерывной вибрации и попадания брызг масла. Это возможно за счет герметичного и вибростойкого корпуса. Таким образом с помощью индуктивного бесконтактного выключателя Вы предотвращаете вероятность аварии, которая может случиться из-за сбоя в скорости вращения вала.
Гарантия на прибор — 2,5 года
Датчик контроля частоты тягового двигателя — ISBt A27B8
Датчик ISBt A27B8 позволяет определять скорость вращения двигателя. Главное преимущество датчика — в возможности работать с высокой частотой переключения (до 10.000Гц) Именно эта характеристика позволяет использовать его с целью контроля частоты тягового двигателя. Однако, он применим и для контроля частоты других объектов.
Датчик контроля скорости вращения в общепромышленном исполнении
Бесконтактный датчик ВТИЮ.1345/1345-01 предназначен для контроля скорости вращения различных механизмов. Находит применение во взрывобезопасных условиях, где требуется контроль за минимальной скоростью, где есть риск самопроизвольного снижения скорости или проскальзывания. ВТИЮ.1345 может быть использован на цепных конвейерах, ковшовых элеваторах и других видах вращающихся и перемещающихся устройств.
Выключатель минимальной скорости контролирует частоту прохождений определенных металлических объектов перед чувствительным элементом. Если частота меньше установленного значения, значит, скорость снижена. Тогда выключатель изменяет состояние выходных контактов, тем самым отключая исполнительный механизм или включая сигнал тревоги. Пороговое значение скорости, при которой происходит срабатывание датчика, устанавливается регулировкой. 10-ти секундная задержка в момент запуска системы позволяет механизмам вернуться к рабочему режиму.
Корпус ВТИЮ. 1345 вандалоустойчивый.
Гарантия на прибор — 24 месяца
Датчики с увеличенной дальностью и высокой частотой оперирования
Для обнаружения объектов с высокой частотой вращения (например, зубчатой шестерни или других механизмов) используйте индуктивные датчики с повышенной (относительно базовых моделей датчиков) частотой оперирования. Например, частота переключения датчика ISN FC21A-31P-6-LS4 с номинальным зазором в 6 мм составляет 2000 Гц.
Высокая частота оперирования характерна не только для типовых датчиков «ТЕКО», но также для бесконтактных выключателей с увеличенным (относительно базового) расстоянием срабатывания.
Подберите нужные вам варианты датчиков с повышенной частотой оперирования. Например:
Пример встраимаевых датчиков в корпусе М12:
| Типовое исполнение | С повышенной чувствительностью |
| ISB AC21A-31P-2-LZS4 | ISB AC21A-31P-4-LZS4 |
| Номинальный зазор — 2мм | Номинальный зазор — 4мм |
| Частота переключения — 3000 Гц | Частота переключения — 3000 Гц |
Пример невстраиваемых датчиков в корпусе M8:
| Типовое исполнение | С повышенной чувствительностью |
| ISN EC12B-31N-2,5-LS4 | ISN EC14B-31N-4-LS4 |
| Номинальный зазор — 2,5 мм | Номинальный зазор — 4мм |
| Частота переключения — 1300 Гц | Частота переключения — 1300 Гц |
Сделайте заказ или проконсультируйтесь со специалистом отдела продаж
по телефону +7 (351) 729-82-00 или по адресу [email protected]
teko-com.ru
Датчики частоты вращения и положения коленчатого и распределительного валов
Датчик частоты вращения и положения коленчатого вала.
Положение поршня в цилиндре является определяющим для расчета момента зажигания. Датчик на коленчатом валу выдает информацию о положении поршней всех цилиндров. Частота вращения коленчатого вала также рассчитывается по сигналу этого датчика. На коленчатом вале устанавливается магнитопроводящий зубчатый диск с расчетным числом зубьев 60, при этом 2 из них отсутствуют. Индуктивный датчик частоты вращения производит последовательный опрос этих 58 зубьев. Он состоит из постоянных магнитов и сердечника из мягкого железа с медной обмоткой (рис. 6.40, где: 1 — постоянный магнит; 2- корпус; 3 — картер двигателя; 4 — сердечник; 5— обмотка; 6 — зубчатый диск с опорной меткой(промежуток между зубьями)). Провод, соединяющий датчик и БУ, выполняется экранированным. При прохождении зубьев через зону чувствительного элемента в нем изменяется магнитный поток.
В обмотке датчика индуцируется переменная ЭДС. На рис. 6.41 изображена Синхронизация сигналов зажигания; положения коленчатого и распределительного валов: а — вторичное напряжение катушки зажигания; б— сигнал индукционного датчика положения коленчатого вала; в — сигнал датчика Холла положения распределительного вала; 1 — замкнутое состояние; 2- зажигание. Амплитуда переменного напряжения уменьшается при увеличении расстояния между датчиком и зубчатым диском и растет с увеличением частоты вращения. Достаточная амплитуда имеет место уже при минимальной частоте вращения (20 мин»1). Геометрия зубьев и полюсов должны соответствовать друг другу. Блок управления формирует из синусоидального напряжения с сильно меняющейся амплитудой прямоугольное напряжение с постоянной амплитудой.

Рис.6.40.
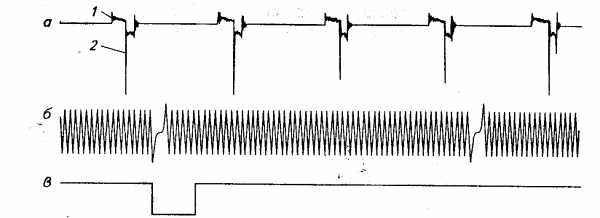
Рис. 6.41.
Боковые фронты прямоугольного напряжения передаются через вход прерываний на процессор. Если текущий период прохождения фронтов в два раза больше как предыдущего, так и последующего, то происходит распознавание опорного промежутка в зубьях. Он сопряжен с определенным положением коленчатого вала. Процессор производит в данный момент синхронизацию положения коленчатого вала. При каждом последующем положительном или отрицательном фронте от боковых кромок зубьев процессор производит дальнейший отсчет положения коленчатого вала на три градуса. Подача сигнала зажигания должна производиться с меньшими шагами. Период между двумя боковыми кромками зубьев разделяется, поэтому, на четыре отрезка. К каждой боковой кромке зуба можно привязать один, два или три таких отрезка времени (благодаря этому можно производить выдачу сигнала зажигания с шагом 0,75 градуса).
Датчик положения распределительного вала. Распределительный вал управляет впускными и выпускными клапанами двигателя. Частота его вращения в два раза ниже, чем частота вращения коленчатого вала.
Информация о положении распределительного вала необходима, если реализуется индивидуальная установка момента впрыска топлива для каждого цилиндра, что имеет место при фазированном (последовательном) впрыске, а также при использовании системы зажигания с низковольтным распределением и индивидуальными катушками.
Для определения положения распределительного вала используется датчик на эффекте Холла. Датчик управляется шторкой из магнитопроводящего материала, закрепленной на распределительном валу.
Напряжение с датчика Холла имеет порядок милливольт, поэтому датчик формирует сигнал и передает его в блок управления в виде двоичного сигнала. В простейшем случае процессор проверяет наличие напряжения с датчика Холла и тем самым положение первого цилиндра в рабочем такте в момент прохождения опорного промежутка зубчатого диска. Специальные формы шторок позволяют использовать сигнал положения распределительного вала в качестве аварийного при повреждении датчика частоты вращения. Разрешающая способность сигнала датчика положения распределительного вала является недостаточной для его применения вместо датчика частоты вращения в нормальном режиме.
studfile.net
Датчики частоты вращения двигателя
Датчики частоты вращения двигателя используются в системах управления двигателем для
- измерения числа оборотов двигателя и
- определения положения коленчатого вала (положение поршня двигателя).Число оборотов рассчитывается по интервалу между сигналами датчика скорости вращения.
Индуктивные датчики скорости вращения
Конструкция и принцип действия
Датчик монтируется прямо напротив ферромагнитного зубчатого колеса (рис. 1, поз. 7) с определенным воздушным зазором. Он имеет сердечник из магнито мягкой стали (полюсный контактный штифт, поз. 4) с обмоткой (5). Полюсный контактный штифт соединен с постоянным магнитом (1). Магнитное поле распространяется через полюсный контактный штифт, проходя в зубчатое колесо. Магнитный поток, проходящий через катушку, зависит от того, попадает ли расположение датчика напротив впадины или зуба колеса. Зубец соединяет в пучок магнитный поток рассеяния, исходящий от магнита.
Через катушку происходит усиление сетевого потока. Впадина, наоборот, ослабляет магнитный поток. Эти изменения магнитного потока при вращении зубчатого колеса индуцируют в катушке синусоидальное выходное напряжение, пропорциональное скорости изменения и числу оборотов двигателя (рис. 2). Амплитуда переменного напряжения интенсивно возрастает с увеличением числа оборотов (несколько мВ… > 100 В). Достаточная амплитуда присутствует, начиная с минимального числа оборотов от 30 в минуту.
| рисунок №1 Индуктивный датчик скорости вращения (конструкция) | |
|---|---|
 |
|
Активные датчики скорости вращения
Активные датчики скорости вращения работают по магнитостатическому принципу. Амплитуда выходного сигнала не зависит от числа оборотов. Благодаря этому можно измерять скорость вращения и при очень низком числе оборотов (квазистатическое определение числа оборотов).
Дифференциальный датчик Холла
На проводящей ток пластинке, по которой вертикально проходит магнитная индукция В, поперечно к направлению тока можно снимать напряжение UH (напряжение Холла), пропорциональное направлению тока.
| рисунок №2 Сигнал индуктивного датчика скорости вращения двигателя | |
|---|---|
 |
|
В дифференциальном датчике Холла магнитное поле вырабатывается постоянным магнитом (рис. 3, поз. 1). Между магнитом и импульсным кольцом (4) находятся два сенсорных элемента Холла (2 и 3). Магнитный поток, который проходит сквозь них, зависит от того, находится ли датчик скорости вращения напротив зубца или паза. Благодаря созданию разности сигналов от обоих датчиков достигается снижение магнитных сигналов возмущения и улучшенное соотношение сигнала/шума. Боковые поверхности сигнала датчика могут обрабатываться без оцифровывания непосредственно в блоке управления.
Вместо ферромагнитного зубчатого колеса используются также многополюсные колеса. Здесь на немагнитном металлическом носителе установлен намагничивающийся пластик, который попеременно намагничивается. Эти северные и южные полюсы принимают на себя функцию зубцов колеса.
AMR -датчики
Электрическое сопротивление магниторезистивного материала (АМР, анизотропный магниторезистивный) является анизотропным.
| рисунок №3 Принцип работы дифференциального датчика Холла | |
|---|---|
 |
|
Это означает, что оно зависит от направления магнитного поля, которое на него воздействует. Это свойство используется в АМР -датчике. Датчик находится между магнитом и импульсным кольцом. Линии поля изменяют свое направление, когда вращается импульсное (активное) колесо (рис. 4). В результате формируется синусоидальное напряжение, которое усиливается в схеме обработки данных и преобразуется в сигнал прямоугольной формы.
GMR -датчики
Усовершенствование активных датчиков скорости вращения отражено в использовании технологии GMR (ГМР) (Giant Magneto-Resistance). По причине высокой чувствительности по сравнению с датчиками АМР здесь возможны большие воздушные зазоры, за счет чего предполагаются использования в трудных сферах применения. Более высокая чувствительность производит меньше шумов фронта сигнала.
В ГМР -датчиках возможны также все двухпроводные порты, используемые ранее в датчиках скорости вращения Холла.
| Принцип определения числа оборотов с помощью датчика АМР | |
|---|---|
 |
|
sto-universal.org.ua
69416-17: A5S Датчики частоты вращения
Назначение
Датчики частоты вращения A5S (далее по тексту — датчики) предназначены для преобразований частоты вращения.
Описание
Принцип действия датчика основан на преобразовании частоты вращения зубчатого ферромагнитного колеса, закреплённого на валу агрегата, в электрические импульсы прямоугольной формы. В основе преобразования частоты вращения заложен эффект Холла. Встроенный полупроводниковый чувствительный элемент преобразует изменения магнитного поля, возникающие при прохождении профиля зуба зубчатого колеса вблизи датчика, в вариации напряжения, а интегрированная электроника преобразует их в импульсы тока прямоугольной формы. Частота импульсов равна частоте следования профилей зубьев, а их амплитуда постоянна во всем рабочем диапазоне частот.
Датчик состоит из первичного преобразователя, внутри которого установлена плата преобразователя с чувствительным элементом и постоянным магнитом. Первичный преобразователь выполнен в виде неразборного цилиндрического корпуса с внешней резьбой, метрической или дюймовой, для проходного монтажа. Один из торцов корпуса является рабочей поверхностью, под которой расположен чувствительный элемент. На противоположном торце размещён разъем для соединения с кабелем или встроенный кабель.
Датчик крепится вблизи зубчатого колеса агрегата. Расстояние от торца датчика до вершины зуба не более 4 мм.
Датчики могут комплектоваться разделительными каскадами D461 или D461R1, которые используется при необходимости работы во взрывоопасной среде. Разделительные каскады обеспечивают искробезопасное подключение цепей электропитания датчика и его сигнальных линий к регистратору. Разделительные каскады выполнены в корпусе для крепления на DIN-рейку и соединяются с датчиком A5S с помощью искробезопасного экранированного кабеля.
Датчики имеют 57 исполнений, разделительные каскады D461 и D461R1 имеют 2 исполнения.
Исполнения датчиков отличаются параметрами внешней резьбы, длиной корпуса, наличием разъёма или жёстко присоединённого кабеля.
Исполнения разделительных каскадов отличаются параметрами электропитания: для исполнения D461(R1)…U1 электропитание осуществляется от источника постоянного тока от 18 до 40 В, для исполнения D461(R1).. .U2 -напряжением переменного тока от 85 до 250 В 50 Гц.
Общий вид датчика и разделительных каскадов представлен на рисунке 1.
Пломбирование датчика не предусмотрено.
Программное обеспечение
1с
отсутствует.
Технические характеристики
Таблица 1 — Метрологический характеристики
|
Наименование характеристики |
Значение |
|
Диапазон преобразований частот входного сигнала, Гц |
от 0,5 до 25000 |
|
Пределы допускаемой относительной погрешности преобразований частоты вращения, % |
±0,1 |
Таблица 2 — Основные технические характеристики
|
Наименование характеристики |
Значение |
|
Рабочие условия эксплуатации — температура окружающей среды, °С |
от -40 до +125 |
|
Параметры электрического питания — напряжение постоянного тока, В |
от 5 до 30 |
|
Потребляемая мощность, В • А, не более |
0,158 |
|
Г абаритные размеры, мм, не более — диаметр — длина |
22 204 |
|
Параметры резьбы: — диаметр наружной резьбы метрический — диаметр наружной резьбы дюймовый |
М12, М14, М18, М22 5/8UNF |
|
Масса, кг, не более |
0,4 |
|
Средний срок службы, лет |
20 |
|
Средняя наработка на отказ, ч |
45000 |
|
Наименование характеристики |
Значение |
|
Маркировка взрывозащиты1 |
0ExiaIICT6/T4 |
|
Примечание: 1) — только для исполнений А5S1 | |
Знак утверждения типа
наносится на титульный лист руководства по эксплуатации типографским способом.
Комплектность
Таблица 3 — Комплектность средства измерений
|
Наименование |
Обозначение |
Количество |
|
Датчик частоты вращения A5 S |
1 шт. | |
|
Разделительный каскад D461(R1) |
1 шт.1) | |
|
Датчики частоты вращения. Руководство по эксплуатации |
1 экз. | |
|
Взрывозащитный разделительный каскад серии D461. Инструкция. |
1 экз 2) | |
|
Взрывозащитный разделительный каскад серии D461R1. Инструкция |
1 экз 2) | |
|
Методика поверки |
МП 253-175-2017 |
1 экз.3) |
|
Примечание 1) — поставляется по отдельному заказу; 2) — проставляется при поставке с разделительным каскадом; 3) — при одновременной поставке в один адрес, но не менее 1 экз. в каждый транспортный ящик. | ||
Поверка
осуществляется по документу МП 253-175-2017 «Датчики частоты вращения A5S. Методика поверки», утверждённому ФГУП «ВНИИМ им. Д. И. Менделеева» 28.04.2017 г.
Основные средства поверки:
— установка тахометрическая УТ05-60, рег. № 6840-78;
— частотомер электронно-счётный Ч3-85/3, рег. № 32359-06.
Допускается применение аналогичных средств поверки, обеспечивающих определение метрологических характеристик поверяемых СИ с требуемой точностью.
Знак поверки наносится на свидетельство о поверке.
Сведения о методах измерений
приведены в эксплуатационном документе.
Нормативные документы
ГОСТ Р 52931-2008 Приборы контроля и регулирования технологических процессов. Общие технические условия
Техническая документация фирмы «Braun GmbH Industrie-Elektronik», Германия
all-pribors.ru