Что такое датчик крутящего момента руля автомобиля
Sign in
Welcome!Log into your account
Ваше имя пользователя
Ваш пароль
Вы забыли свой пароль?
Password recovery
Восстановите свой пароль
Ваш адрес электронной почты
Домой устройство автомобиля Что такое датчик крутящего момента руля автомобиля
Датчик крутящего момента рулевого колеса устанавливается на автомобилях с ЭУР (электроусилитель руля). Принцип его работы заключается в измерении величины крутящего момента руля, проще говоря, чем сильнее водитель крутит рулевое колесо, тем больше должно быть усиление со стороны ЭУР. В некоторых автомобилях датчик крутящего момента работает в паре с датчиком, который фиксирует угол поворота руля.
Известно несколько разновидностей датчиков крутящего момента руля, принцип работы которых основывается на физических принципах отличающиеся друг от друга.
Устанавливается датчик крутящего момента на рулевой колонке. В его устройство входят многополюсный магнит, с несколькими парами плюсов, и два статора имеющие зубья особой формы, которые находятся на валу-шестерне. С помощью торсиона-стержня рулевой вал и вал-шестерня связываются между собой, а на корпусе устанавливается чувствительный элемент (датчик). Чтобы увеличить чувствительность и надежность измерений в конструкции датчика крутящего момента устанавливается два датчика Холла.
Что касается принципа действия датчика крутящего момента, то если кратко смысл вот в чем. Когда рулевое колесо находится в нейтральном положении, зубцы на статорах находятся строго между полюсами магнитов.
 Такое положение фиксирующих элементов указывает на минимальный сигнал, исходящий от датчика. Во время проворачивания рулевого колеса торсион начинает вращаться и закручиваться, что приводит в движение многополюсный магнит. В то время, когда зубья статора находятся напротив полюсов магнита, образуется максимальный магнитный импульс, который улавливает датчик Холла.
Такое положение фиксирующих элементов указывает на минимальный сигнал, исходящий от датчика. Во время проворачивания рулевого колеса торсион начинает вращаться и закручиваться, что приводит в движение многополюсный магнит. В то время, когда зубья статора находятся напротив полюсов магнита, образуется максимальный магнитный импульс, который улавливает датчик Холла.Однако хочется заметить, что угол работы торсиона не велик и составляет всего 4-5° в одну и другую стороны, но так как датчик крутящего момента, работающий благодаря эффекту Холла, имеет повышенную точность этого вполне достаточно для корректной работы ЭУР автомобиля. Иногда, чтобы компенсировать температурные изменения во время перемещения элементов измерения датчика крутящего момента, устанавливается дополнительно температурный датчик.
Очень похож по принципу работы и устройству магниторезистивный датчик крутящего момента. Измерения происходят похожим образом, путем вращения на рулевом валу двух магниторезистивных чувствительных элементов, которые измеряют магнитный поток и образуют электрический сигнал.

Владельцы автомобилей, оборудованные ЭУР, должны помнить, что в случаи выхода из строя датчика крутящего момента рулевого колеса происходит автоматическое плавное отключение усилителя.
Предыдущая статьяЧто делать если течет термостат на Citroen C4
Следующая статьяЕзда «накатом» — пережиток прошлого или возможность сэкономить бензин?
ПОПУЛЯРНЫЕ СООБЩЕНИЯ
Adblockdetector
Датчики электрического усилителя рулевого управления / Автоэлектроника / Сообщество EasyElectronics.ru
Как правило, в современных легковых автомобилях все чаще применяют электрический усилитель рулевого управления. В интернете и специализированной литературе довольно подробно написано, для чего он нужен и как устроен. Для автолюбителя и работника автосервиса (любящего свою работу) уровень такого предоставленного материала иногда вполне достаточен.
Но для инженера или разработчика, к сожалению, он довольно скуден и поверхностен, а иногда и не совсем точен. На примере одной конструкции, весьма уважаемого производителя, попробую изложить дополнительную информацию, которую я получил при разборке данного устройства. Касается это в основном датчиков, определяющих работу данного устройства, и пример реализации их подключения. Возможно, это будет полезно, хотя бы студентам и инженерам. Для людей, профессионально занимающимся разработкой автомобилей это изложение покажется, наверное, смешным.
Итак, есть такой узел, один вал (назовем выходной) которого управляет углом поворота передних колес, а к другому противоположному валу (назовем входной вал) прикреплен руль. К рулю (рулевому колесу) прилагает усилие тело своими руками, (стандартным весом по ГОСТу 75кг, имеющее право на управление автомобилем, и совершающее обдуманные законопослушные действия) в надежде изменить угол поворота колес. При этом на каждое это колесо приходится часть веса автомобиля, и довольно таки существенное (300 — 600 кг), и при диаметре рулевого колеса, не превышающем полметра, усилие, которое надо прилагать к рулю, на неподвижном автомобиле, без дополнительного усилителя, очень чрезмерно для большинства, по мнению медиков, здоровых людей.
Для облегчения усилия, требуемого прилагать к рулевому колесу, ставят электромотор, который прилагает дополнительное усилие к выходному валу. Какое дополнительное усилие, и в какую сторону надо прилагать электромотору, определят электронный блок усилителя рулевого управления, с помощью датчика усилия, которое прилагает водитель к рулевому колесу. Датчик этот расположен, как правило, в месте соединения выходного и входного вала. А соединяются эти валы между собой с помощью гибкого элемента (как правило, торсиона, параметры которого имеют заданные значения), который гибко деформируется (закручивается) в ту или иную сторону, на угол, пропорционально по степени прилагаемого усилия между рулевым колесом, и силой сопротивления передних колес автомобиля их повороту. Электромотор применяют, как правило, теперь бес коллекторный, трехфазный. Для управления вращением электромотором требуется схема, формирующая из постоянного тока бортовой сети переменное напряжение из трех фаз. Контролировать правильное вращение электромотора, помогает еще один датчик – датчик вращения и угла поворота его оси.

Электронная начинка этого блока содержит довольно таки производительный микроконтроллер (примерно уровня STM32F4xx и даже выше), контроллер управления трехфазным мотором, цепи предотвращения работы и отключения электрических цепей при возникновении нештатной работы или внутренней неисправности.
Наверное, вы уже устали читать, приступим к разборке (фотографии простые, извиняюсь за качество). Я буду применять иногда свои выдуманные названия к предметам, извините и поправьте если что.
Датчик усилия (далее ДУ), представляет собой систему из:
— Кольцевого многополюсного магнита (далее КМ), напрессованного на входной вал.
— Кольцевого селектора (далее КС) магнитного поля, напрессованного на выходной вал. Он состоит и пластикового цилиндрического корпуса, с двумя магнитопроводящими кольцами, которые имеют клювообразные элементы, на стороне, обращенной к КМ. Эти клювообразные элементы соответствуют количеству и положению магнитных полюсов на КМ.
Эти клювообразные элементы соответствуют количеству и положению магнитных полюсов на КМ.
— Датчика магнитного поля (далее ДМ), закрепленного уже на неподвижном корпусе усилителя рулевого управления, и состоящего из двух магнитопроводящих полуколец, передающих магнитное поле от КС к двум датчикам холла.
Начну иллюстрации:
Так выглядят еще не разъединённые входной и выходной вал:
Вынимаем шпильку и разъединяем: (Кольцевой трансформатор=кольцевой селектор)
Дальше:
Напрессованный КС, КМ, видны пазы входного и выходного вала, ограничивающие угол закручивания торсиона, и даже если он сломается, рулевое управление будет сохранено. Задача торсиона, не передавать весь крутящий момент, а только его измерить:
Слева — корпус ДМ, справа — КС.
Датчики холла (их два, тип мне неизвестен):
А так весь механизм выложен последовательно, все снято со своих мест:
Как возможно это работает:
В собранной конструкции, пока нет деформации торсиона, Полюса КМ расположены напротив клювообразных отводов двух магнитопроводящих колец КС в определенном положении.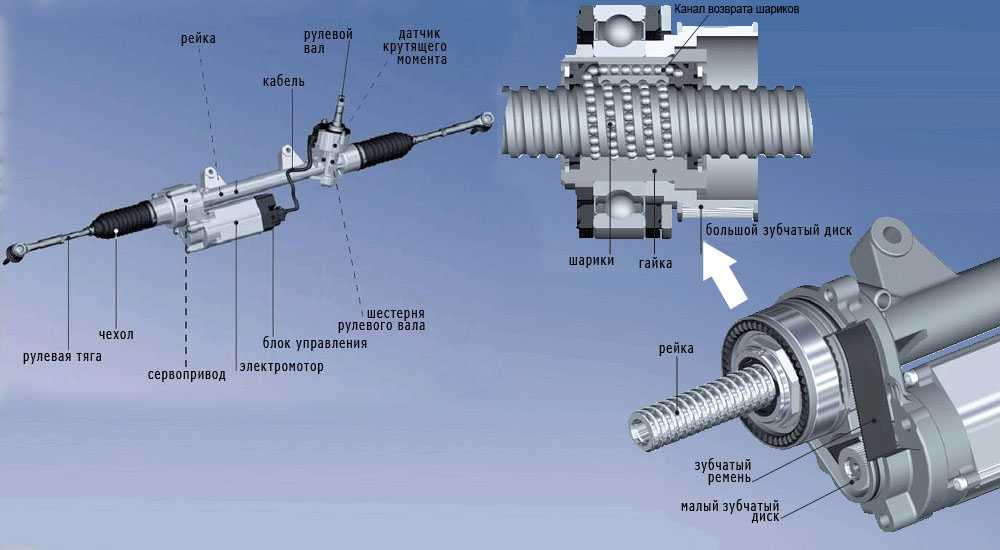 Наводимые магнитные поля через двух кольцевой приемник ДМ подводится к своему соответствующему датчику холла. И в этом состоянии магнитные поля, приводимые к датчикам холла одинаковы.
Наводимые магнитные поля через двух кольцевой приемник ДМ подводится к своему соответствующему датчику холла. И в этом состоянии магнитные поля, приводимые к датчикам холла одинаковы.
Что можно увидеть на экране осциллографа?
КМ и КС расположены без смещения относительно друг друга:
Сигналы на выходах датчиков одинаковы:
Смещение в КМ относительно КС одну сторону:
Сигнал (один увеличивается, другой на столько же уменьшается):
Смещение в другу сторону:
Сигнал:
Плавно совмещаем КМ и КС:
В идеале, сигнал на выходе датчиков должен иметь такую характеристику:
Чрезмерно деформировать торсион, сломать его, не дают соответствующие пазы входного и выходного вала, находящиеся в определенном взаимном положении.
Иногда, “разводят”, или неправильно ставят диагноз некоторые «спецы», резко вращая рулевое колесо из стороны в сторону, на заглушенном автомобиле. При этом из рулевой колонки доносится отчетливый стук, который пытаются выдать за проявление неисправности. А на самом деле звук этот и издают пазы при соударении, так как компенсировать деформацию торсиона при неработающем двигателе некому (не работает двигатель – зачем тебе и электроусилитель руля). В “гаражах” иногда работают вполне грамотные и опытные люди, но чек и квитанция это дополнительный страховой полис, мало ли. Не экономьте на правильном диагнозе. То же самое происходит и в работе золотника (гидравлического распределителя) гидравлического усилителя руля.
Электромотор, три фазы, магнитный ротор имеет четыре полюса:
Выходной вал электромотора, проходит через датчик вращения:
Датчик вращения электромотора приподнят, видно эксцентрик на валу (часть вращающегося трансформатора):
Датчик вращения и положения оси электродвигателя усилителя рулевого управления,
называют его еще вращающимся трансформатором (далее ВТ), или ресольвером. В том месте, где расположен этот датчик, на оси электромотора имеется эксцентрик. Который при вращении, меняет расположение магнитного поля между полюсами трансформатора. Как взаимно расположены обмотки на полюсах, смотрите на рисунке далее (не указал фазировку, простите).
В том месте, где расположен этот датчик, на оси электромотора имеется эксцентрик. Который при вращении, меняет расположение магнитного поля между полюсами трансформатора. Как взаимно расположены обмотки на полюсах, смотрите на рисунке далее (не указал фазировку, простите).
В данном случае, ВТ имеет три обмотки, на одну подается опорное синусоидальное напряжение, а с двух других снимается синусоидальное напряжение, пропорциональное углу поворота оси электромотора. Для примера, подаем напряжение синусоидальной формы на обмотку “возбуждения” со звуковой карты компьютера, а с двух других обмоток будем снимать показания осциллографом. Эксцентриком будет служить простой металлический винт. Думаю картинки красноречивы и комментировать каждую не имеет смысла. Но рассматривая экран осциллографа, надо проявлять немного фантазии, ибо смотрим два канала, а синхронизация только по одному. Иногда один луч кажется двоится.
С разобранным корпусом для наглядности;
Подаем сигнал:
При отсутствии эксцентрика внутри ВТ
на выходе нет сигналов:
Вставляем имитатор эксцентрика и начинаем его крутить, и смотрим сигналы:
Не стал заморачиваться с анимацией, думаю и так понятно. Имея два таких сигнала, измеряя их амплитуду и фазу, можно с достаточной точностью и надежностью определять положение оси электродвигателя. Ну и для завершения, так примерно организованы входные и выходные цепи электронного блока усилителя руля (тестер и мои личные фантазии):
Имея два таких сигнала, измеряя их амплитуду и фазу, можно с достаточной точностью и надежностью определять положение оси электродвигателя. Ну и для завершения, так примерно организованы входные и выходные цепи электронного блока усилителя руля (тестер и мои личные фантазии):
Все сигналы поступают для обработки в микроконтроллер на аналоговые входы. Выход TSY — напряжение питания датчиков холла. Магнитные датчики не так склонны к запотеванию и наличию грязи, как оптические, терпимы к высоким и низким температурам.
Но и лепить где попало неодимовые магниты в машине и дома, тоже не стоит. К тому же они могут привести к вреду здоровья при неправильном использовании.
Надеюсь не утомил.
С уважением, Астанин Сергей.
Готов к вопросам и комментариям тут.
Будем продолжать в таком духе и разбирать автоматические коробки передач и вариаторы тут :)?
Датчики крутящего момента | Kistler
4501a
Датчик крутящего момента вала, преобразователь крутящего момента с пропусканием кольца из измерения от 2 нм до 1 кНм)
4502a
9502a 9000. датчик крутящего момента (диапазон измерения от 0,5 Нм до 1 кНм)
датчик крутящего момента (диапазон измерения от 0,5 Нм до 1 кНм)
4503B
Датчик крутящего момента на валу, двухдиапазонный датчик крутящего момента (диапазон измерения от 0,2 Нм до 9 кНм)0003
4503BQ
Датчик крутящего момента вала, преобразователь крутящего момента с двойным диапазоном (измерения от 2 нм до 5 кНм)
4520A
SENSOR. диапазон от 1 до 1000 Нм)
4541AN1
Оценочный прибор KiTorq Stator для всех роторов N1 (60 импульсов)
4541AN2
Оценка прибора KitorQ для всех N2 (60 импульсов + Z-Pulse) Роторы
4542AN1B
Оценка. , с интерфейсом PROFIBUS
, с интерфейсом PROFIBUS
4542AN1A
Оценочный прибор KiTorq Stator для всех роторов N1 (60 импульсов), с интерфейсом PROFINET (RT/IRT)
4550a
Измерение плавного плавника.
T-Sensor 5413-1030/1 1 Н·м 1/4″
Датчик крутящего момента с фиксированным измерительным валом, номинальное значение 1 Нм
T-Sensor 5413-1030/10 10 Н·м 1/4″
Датчик крутящего момента с фиксированным измерительным валом, номинальное значение 10 Н·м
/10 1 513 T-Sensor /4 «Датчик крутящего момента с вращающимся измерительным валом и кабелем, номинальное значение 1 нм
T-Sensor 5413-1100/2 2N · M 1/4″
. датчик с вращающимся измерительным валом и кабелем, номинальное значение 2 Нм
датчик с вращающимся измерительным валом и кабелем, номинальное значение 2 Нм
T-Sensor 5413-1151/5 5 Н·м 1/4″6kt
Датчик крутящего момента с вращающимся измерительным валом, шестигранным приводом и кабелем, 5 Н·м 3-Sensor
T 10N · м 1/4 «6KT
Датчик крутящего момента с вращающимся измерительным валом, шестигранным приводом и кабелем, 10 нм
T-Sensor 5413-1160/1 1N · M 1/4″
Датчик крутящего момента в тонком корпусе, с кабелем, номинальное значение 1 Нм
T-Sensor 5413-1160/5 5 Н·м 1/4″
Датчик крутящего момента в тонком корпусе, с кабелем, номинальное значение 5 Нм
— 2019
Важность датчиков крутящего момента в различных приложениях широко распространена среди различных приложений конечных пользователей на этом рынке. Использование тензометрического датчика является одним из старейших методов измерения крутящего момента, который используется до настоящего времени.Однако в последнее время достижения в технологии измерения крутящего момента привели к разработке нескольких новых разновидностей датчиков крутящего момента.
Использование тензометрического датчика является одним из старейших методов измерения крутящего момента, который используется до настоящего времени.Однако в последнее время достижения в технологии измерения крутящего момента привели к разработке нескольких новых разновидностей датчиков крутящего момента.
Европа является одним из наиболее технически продвинутых рынков применения датчиков крутящего момента благодаря наличию в этом регионе известных поставщиков систем, крупных компаний-производителей полупроводников, конкурентоспособных компаний аэрокосмической и оборонной промышленности, а также производителей оригинального медицинского оборудования (OEM).
В этом отчете европейский рынок датчиков крутящего момента разделен по типам на вращающиеся, статические/реактивные, магнитоупругие и датчики крутящего момента на поверхностных акустических волнах (ПАВ). Основные области применения датчиков крутящего момента включают автомобилестроение, промышленное производство, контрольно-измерительные приборы, аэрокосмическую и медицинскую отрасли. В соответствии с географической сегментацией рынок подразделяется на основные страны, такие как Великобритания, Германия, Франция и Италия.
В соответствии с географической сегментацией рынок подразделяется на основные страны, такие как Великобритания, Германия, Франция и Италия.
В отчете содержится всесторонний обзор различной динамики рынка, включая драйверы, ограничения и открывающиеся возможности. В этом отчете также рассматриваются насущные проблемы, связанные с этим рынком, и императивы победы, принятые основными игроками для достижения успеха в этой отрасли. В дополнение к этому в отчете особое внимание уделяется профилям компаний, портфелям продуктов, финансовым показателям компаний, последним разработкам и ключевым стратегиям роста.
Варианты настройки:
Наряду с рыночными данными вы также можете настроить оценки MMM в соответствии с конкретными потребностями вашей компании. Настройте для получения исчерпывающих данных о отраслевых стандартах и глубокого анализа следующих параметров:
Анализ продуктов
- Модель использования (углубленный анализ тенденций) продуктов (по сегментам)
- Матрица продуктов, которая дает подробное сравнение портфеля продуктов каждой компании на уровне страны и подсегмента
- Анализ степени принятия продуктов конечными пользователями (по сегментам и странам)
- Всеобъемлющий охват утверждений продуктов, продуктов, находящихся в стадии разработки, и отзывов продуктов
Данные от фирм-производителей
- Оперативный анализ реакции фирм-производителей на последние рыночные события и тенденции
- Мнение экспертов о различных применениях датчиков крутящего момента
- Качественные исходные данные по макроэкономическим показателям, слияниям и поглощениям в каждой географии
Сравнительный анализ
- Рыночные данные и основные события ведущих компаний
Данные об отгрузке/объеме
- Отслеживание стоимости компонентов, отгружаемых ежегодно в каждом регионе
Анализ тенденций применения
- Матрица приложений, которая дает подробное сравнение портфеля приложений каждой компании, отображенных в каждой географии
Содержание
1 Введение (Страница № — 11)
1. 1 Цели исследования
1 Цели исследования
1.2 Сегментация рынка и охват
1.3 Заинтересованные стороны
2 Методология исследования (Страница № — 13)
2.1 Интегрированная экосистема европейского рынка датчиков крутящего момента
2.2 Выход на европейский рынок Датчик крутящего момента
2.2.1 Нисходящий подход
2.2.2 Подход «снизу вверх»
2.2.3 Подход со стороны спроса
2.2.4 Подход на основе макроиндикаторов
2.3 Предположения
3 Резюме (страница № — 21)
4 Обзор рынка (страница № — 23)
4.1 Введение
4.2 Рынок датчиков крутящего момента: сравнение с родительским рынком
4.3 Рыночные драйверы и ингибиторы
4.4 Ключевая динамика рынка
4.5 Анализ со стороны спроса
5 Европейский рынок Датчик крутящего момента, по типу (Страница № — 29)
5.1 Введение
5.2 Европейский рынок Датчик крутящего момента, сравнение типов с материнским рынком
5. 3 Датчик вращательного момента
3 Датчик вращательного момента
5.3.1 Европейский рынок Ротационный датчик крутящего момента по приложениям
5.4 Статический датчик крутящего момента
5.4.1 Европейский рынок статических датчиков крутящего момента по приложениям
5.5 Магнитоупругий датчик крутящего момента
5.5.1 Рынок Магнитоупругих датчиков крутящего момента в Европе по приложениям
5.6 Датчик крутящего момента на поверхностных акустических волнах (ПАВ)
5.6.1 Европейский рынок датчиков крутящего момента на поверхностных акустических волнах (SAW) по приложениям
6 Европейский рынок датчиков крутящего момента по приложениям (страница № — 38)
6.1 Введение
6.2 Европейский рынок Датчик крутящего момента в автомобильном секторе
6.2.1 Европейский рынок Датчик крутящего момента в автомобильном секторе по географии
6.2.2 Европейский рынок Датчик крутящего момента в автомобильном секторе по типу
6.3 Европейский рынок Датчик крутящего момента в промышленном секторе
6. 3.1 Европейский рынок датчиков крутящего момента в промышленном секторе по географическому признаку
3.1 Европейский рынок датчиков крутящего момента в промышленном секторе по географическому признаку
6.3.2 Европейский рынок Датчик крутящего момента в промышленном секторе по типу
6.4 Европейский рынок Датчик крутящего момента в секторе испытаний и измерений
6.4.1 Европейский рынок Датчик крутящего момента в секторе испытаний и измерений по географическому признаку
6.4.2 Европейский рынок Датчик крутящего момента в секторе испытаний и измерений, по типу
6.5 Европейский рынок Датчик крутящего момента в аэрокосмическом и оборонном секторе
6.5.1 Европейский рынок Датчик крутящего момента в аэрокосмическом и оборонном секторе по географии
6.5.2 Европейский рынок Датчик крутящего момента в аэрокосмическом и оборонном секторе по типу
6.6 Европейский рынок Датчик крутящего момента в медицинском секторе
6.6.1 Европейский рынок Датчик крутящего момента в медицинском секторе по географии
6.6.2 Европейский рынок датчиков крутящего момента в медицинском секторе, по типу
7 Европейский рынок датчиков крутящего момента, по географии (страница № — 51)
7. 1 Введение
1 Введение
7.2 Рынок датчиков крутящего момента в Германии
7.2.1 Рынок Датчик крутящего момента в Германии, по приложениям
7.3 Рынок датчиков крутящего момента Великобритании
7.3.1 Рынок датчиков крутящего момента в Великобритании, по заявке
7.4 Рынок датчиков крутящего момента во Франции
7.4.1 Рынок Датчик крутящего момента во Франции по приложениям
7.5 Рынок датчиков крутящего момента в Италии
7.5.1 Рынок датчиков крутящего момента в Италии, по заявкам
8 Рынок датчиков крутящего момента: конкурентная среда (страница № — 60)
8.1 Рынок датчиков крутящего момента: анализ доли компании
8.2 Присутствие компании на рынке Датчики крутящего момента по типу
8.3 Разработка новых продуктов
8.4 Слияния и поглощения
8.5 Другие разработки
9 Рынок датчиков крутящего момента в Европе, по компаниям (№ страницы — 66)
(Обзор, финансовые показатели, продукты и услуги, стратегия и разработки)*
9. 1 НВМ
1 НВМ
9.2 Пьезотроника для печатных плат
9.3 Прикладные измерения
9.4 Передовые сенсорные технологии Futek, Inc.
9.5 Kistler Instrumente Ag
9.6 АББ ООО
9.7 Ханивелл
* Подробная информация об обзоре, финансовых показателях, продуктах и услугах, стратегии и разработках может быть недоступна в случае компании, не зарегистрированной на бирже
10 Приложение (Страница № — 85)
10.1 Параметры настройки
10.1.1 Анализ продуктового портфеля
10.1.2 Анализ данных на уровне страны
10.1.3 Сравнение продуктов различных конкурентов
10.1.4 Торговый анализ
10.2 Связанные отчеты
10.3 Знакомство с RT: анализ рынка в реальном времени
10.3.1 Снимки RT
10.3.1.1 Снимок 1: Экосистема
10.3.1.2 Снимок 2: Количественная диаграмма
10.3.1.3 Снимок 3: Тепловая карта, компании
Список таблиц (40 таблиц)
Таблица 1 Объем европейского рынка датчиков крутящего момента, 2014 г. (млн долл. США)
(млн долл. США)
Таблица 2. Объем европейского рынка датчиков крутящего момента по приложениям, 2014 г. (млн долл. США)
Таблица 3 Мировые расходы на НИОКР в разбивке по географическим регионам, 2013 г. (млн долл. США)
Таблица 4 Европейский рынок датчиков крутящего момента: сравнение с материнским рынком, 2013–2019 гг.(млн долл. США)
Таблица 5 Европейский рынок датчиков крутящего момента: драйверы и ингибиторы
Таблица 6 Европейский рынок датчиков крутящего момента: по приложениям, 2013–2019 гг. (млн долл. США)
Таблица 7 Европейский рынок датчиков крутящего момента: по географическому признаку, 2014 г. (млн долл. США)
Таблица 8 Европейский рынок датчиков крутящего момента: рынки приложений, 2013–2019 гг. (млн долл. США)
Таблица 9. Европейский рынок датчиков крутящего момента по типам, 2013–2019 гг. (млн долл. США)
Таблица 10 Европейский рынок датчиков крутящего момента: сравнение типов с исходным рынком, 2013–2019 гг.(млн долл. США)
США)
Таблица 11. Европейский рынок датчиков вращательного момента по приложениям, 2013–2019 гг. (млн долл. США)
Таблица 12. Европейский рынок статических датчиков крутящего момента по областям применения, 2013–2019 гг. (млн долл. США) 90 275
Таблица 13. Европейский рынок магнитоупругих датчиков крутящего момента по приложениям, 2013–2019 гг. (млн долл. США)
Таблица 14 Европейский рынок датчиков крутящего момента на поверхностных акустических волнах (ПАВ) по областям применения, 2013–2019 гг. (млн долл. США)
Таблица 15 Европейский рынок датчиков крутящего момента по приложениям, 2013–2019 гг. (млн долл. США)
Таблица 16 Европейский рынок датчиков крутящего момента в автомобильном секторе по географическому признаку, 2013–2019 гг.(млн долл. США)
Таблица 17 Европейский рынок датчиков крутящего момента в автомобильном секторе по типам, 2013–2019 гг. (млн долл. США)
Таблица 18 Европейский рынок датчиков крутящего момента в промышленном секторе по географическому признаку, 2013–2019 гг. (млн долл. США)
(млн долл. США)
Таблица 19 Европейский рынок датчиков крутящего момента в промышленном секторе по типам, 2013–2019 гг. (млн долл. США)
Таблица 20 Европейский рынок датчиков крутящего момента в секторе испытаний и измерений по географическому признаку, 2013–2019 гг. (млн долл. США)
Таблица 21 Европейский рынок датчиков крутящего момента в секторе испытаний и измерений по типам, 2013–2019 гг.(млн долл. США)
Таблица 22 Европейский рынок датчиков крутящего момента в аэрокосмическом и оборонном секторе по географическому признаку, 2013–2019 гг. (млн долл. США)
Таблица 23 Европейский рынок датчиков крутящего момента в аэрокосмическом и оборонном секторе по типам, 2013–2019 гг. (млн долл. США)
Таблица 24 Европейский рынок датчиков крутящего момента в медицинском секторе по географическому признаку, 2013–2019 гг. (млн долл. США)
Таблица 25 Европейский рынок датчиков крутящего момента в медицинском секторе по типам, 2013–2019 гг. (млн долл. США)
Таблица 26 Европейский рынок датчиков крутящего момента по географическому признаку, 2013–2019 гг. (млн долл. США)
(млн долл. США)
Таблица 27. Рынок датчиков крутящего момента в Германии по приложениям, 2013–2019 гг. (млн долл. США)
Таблица 28. Рынок датчиков крутящего момента в Великобритании по областям применения, 2013–2019 гг. (млн долл. США)
Таблица 29. Рынок датчиков крутящего момента во Франции по приложениям, 2013–2019 гг. (млн долл. США)
Таблица 30 Рынок датчиков крутящего момента в Италии по областям применения, 2013–2019 гг. (млн долл. США)
Таблица 31 Рынок датчиков крутящего момента: анализ доли компании, 2013 г. (%)
Таблица 32 Европейский рынок датчиков крутящего момента: разработка новых продуктов
Таблица 33 Европейский рынок датчиков крутящего момента: слияния и поглощения
Таблица 34 Европейский рынок датчиков крутящего момента: другие разработки
Таблица 35 ABB Ltd.: Годовой доход по бизнес-сегментам, 2010–2013 гг. (млн долл. США)
Таблица 36 ABB Ltd.: Годовой доход по географическим сегментам, 2010–2013 гг. (млн долл. США)
США)
Таблица 37 ABB Ltd.: основные операционные данные, 2010–2014 гг. (млн долл. США)
Таблица 38 Honeywell: годовой доход по бизнес-сегментам, 2010–2014 гг. (млн долл. США)
Таблица 39 Honeywell: Годовой доход по географическим сегментам, 2010–2014 гг. (млн долл. США)
Таблица 40 Honeywell: основные операционные данные, 2010–2014 гг. (млн долл. США)
Список рисунков (41 рисунок)
Рисунок 1 Европейский рынок датчиков крутящего момента: сегментация и охват
Рис. 2. Рынок датчиков крутящего момента: интегрированная экосистема
Рис. 3 Методология исследования
Рис. 4 Подход сверху вниз
Рис. 5 Подход «снизу вверх»
Рис. 6. Подход со стороны спроса
Рисунок 7. Подход, основанный на макропоказателях: расходы на НИОКР, 2013 г. (млн долл. США)
Рис. 8. Снимок европейского рынка датчиков крутящего момента
Рис. 9. Рынок датчиков крутящего момента: аспекты роста
Рис. 10 Рынок датчиков крутящего момента: сравнение с исходным рынком
10 Рынок датчиков крутящего момента: сравнение с исходным рынком
Рис. 11. Европейский рынок датчиков крутящего момента по приложениям, 2014 и 2019 гг.
Рисунок 12. Европейский рынок датчиков крутящего момента в разбивке по географии, 2014 г. (млн долларов США)
Рис. 13 Анализ стороны спроса
Рис. 14. Европейский рынок датчиков крутящего момента по типам, 2014 и 2019 гг. (млн долл. США)
Рисунок 15. Европейский рынок датчиков крутящего момента: сравнение типов с исходным рынком, 2013–2019 гг.(млн долл. США)
Рис. 16. Европейский рынок датчиков вращательного момента по приложениям, 2013–2019 гг. (млн долл. США)
Рисунок 17. Европейский рынок статических датчиков крутящего момента по областям применения, 2013–2019 гг. (млн долл. США)
Рис. 18. Европейский рынок магнитоупругих датчиков крутящего момента в разбивке по приложениям, 2013–2019 гг. (млн долл. США)
Рисунок 19. Европейский рынок датчиков крутящего момента на поверхностных акустических волнах (SAW) по областям применения, 2013–2019 гг. (млн долл. США)
(млн долл. США)
Рисунок 20. Европейский рынок датчиков крутящего момента по областям применения, 2014 и 2019 гг. (млн долл. США)
Рисунок 21 Европейский рынок датчиков крутящего момента в автомобильном секторе по географическому признаку, 2013–2019 гг. (млн долл. США)
Рисунок 22. Европейский рынок датчиков крутящего момента в автомобильном секторе по типам, 2014 и 2019 гг. (млн долл. США)
Рисунок 23 Европейский рынок датчиков крутящего момента в промышленном секторе по географическому признаку, 2013–2019 гг. (млн долл. США)
Рисунок 24. Европейский рынок датчиков крутящего момента в промышленном секторе, по типам, 2014 и 2019 гг. (млн долл. США)
Рисунок 25. Европейский рынок датчиков крутящего момента в секторе испытаний и измерений по географическому признаку, 2013–2019 гг.(млн долл. США)
Рисунок 26. Европейский рынок датчиков крутящего момента в секторе испытаний и измерений по типам, 2014 и 2019 гг. (млн долл. США)
Рисунок 27. Европейский рынок датчиков крутящего момента в аэрокосмическом и оборонном секторе по географическому признаку, 2013–2019 гг. (млн долл. США)
(млн долл. США)
Рисунок 28. Европейский рынок датчиков крутящего момента в аэрокосмическом и оборонном секторе по типам, 2014 и 2019 гг. (млн долл. США)
Рис. 29 Европейский рынок датчиков крутящего момента в медицинском секторе по географическому признаку, 2013–2019 гг. (млн долл. США)
Рисунок 30. Европейский рынок датчиков крутящего момента в медицинском секторе по типам, 2014 и 2019 гг.(млн долл. США)
Рисунок 31. Европейский рынок датчиков крутящего момента: анализ роста по географии, 2014 и 2019 гг. (млн долл. США)
Рисунок 32. Рынок датчиков крутящего момента в Германии по областям применения, 2013–2019 гг. (млн долл. США)
Рис. 33. Рынок датчиков крутящего момента в Германии: снимок приложения
Рис. 34. Рынок датчиков крутящего момента в Великобритании по областям применения, 2013–2019 гг. (млн долл. США)
Рисунок 35. Рынок датчиков крутящего момента в Великобритании: снимок приложения
Рис. 36. Рынок датчиков крутящего момента во Франции по областям применения, 2013–2019 гг. (млн долл. США)
(млн долл. США)
Рис. 37 Рынок датчиков крутящего момента во Франции: снимок приложения
Рисунок 38. Рынок датчиков крутящего момента в Италии по областям применения, 2013–2019 гг. (млн долл. США)
Рис. 39 Рынок датчиков крутящего момента в Италии: снимок приложения
Рис. 40 Рынок датчиков крутящего момента: анализ доли компании, 2013 г. (%)
Рис. 41 Датчик крутящего момента: охват продуктов компании по типам, 2014 г.
Датчик крутящего момента или преобразователь крутящего момента — это электронное устройство, которое преобразует крутящий момент, приложенный к вращающемуся или статическому устройству, в электрический сигнал. Они используются для измерения как реактивного момента, так и вращательного момента. Датчики крутящего момента существуют во многих диапазонах измерения как реактивного (статического), так и вращательного (динамического) крутящего момента.
Датчики реактивного крутящего момента сконструированы с использованием тензодатчика, установленного на валу. Когда вал деформируется под действием приложенного крутящего момента, сопротивление в тензодатчике либо увеличивается, либо уменьшается, вызывая изменение напряжения. Вращающиеся датчики крутящего момента имеют несколько более сложную конструкцию, так как вращающийся вал нуждается в контактном кольце или бесконтактном вращающемся трансформаторе для передачи сигнала тензодатчика от вращающегося вала к неподвижной части.
Когда вал деформируется под действием приложенного крутящего момента, сопротивление в тензодатчике либо увеличивается, либо уменьшается, вызывая изменение напряжения. Вращающиеся датчики крутящего момента имеют несколько более сложную конструкцию, так как вращающийся вал нуждается в контактном кольце или бесконтактном вращающемся трансформаторе для передачи сигнала тензодатчика от вращающегося вала к неподвижной части.
Целью данного исследования является анализ европейского рынка датчиков крутящего момента. Этот отчет включает прогноз доходов, рыночные тенденции и возможности, а также конкурентную среду ключевых игроков, представленных в этом отчете. Анализ рынка проводится на различных сегментах рынка, основанных на типе, применении и географии. По типу рынок делится на роторные, статические/реактивные, магнитоупругие и ПАВ. В зависимости от применения рынок подразделяется на автомобильный, промышленный, контрольно-измерительный, аэрокосмический и оборонный, а также медицинский.