Эксплуатационная скорость — Энциклопедия по машиностроению XXL
Для эффективного решения указанной задачи может быть рекомендовано создание автоматизированной системы управления движением. Эта система обеспечивает автоматическую смену сигналов в светофорах в зависимости от условий движения автомобильного транспорта на обслуживаемых проездах. В настоящее время электронные автоматические системы регулирования уличного движения уже созданы и планируются к вводу в строй во многих городах мира [5, 7, 9]. В 1971 году в Москве вступит в строй аналогичная система, которая будет обслуживать центральные районы города. Исследования, проведенные в СССР, а также за рубежом, в частности Дорожной исследовательской лабораторией в Англии [4], показали, что затраты на усовершенствование регулирования движения транспорта через один перекресток окупятся в течение года, если время простоя транспорта на перекрестке снизится в результате модернизации всего лишь на 10%.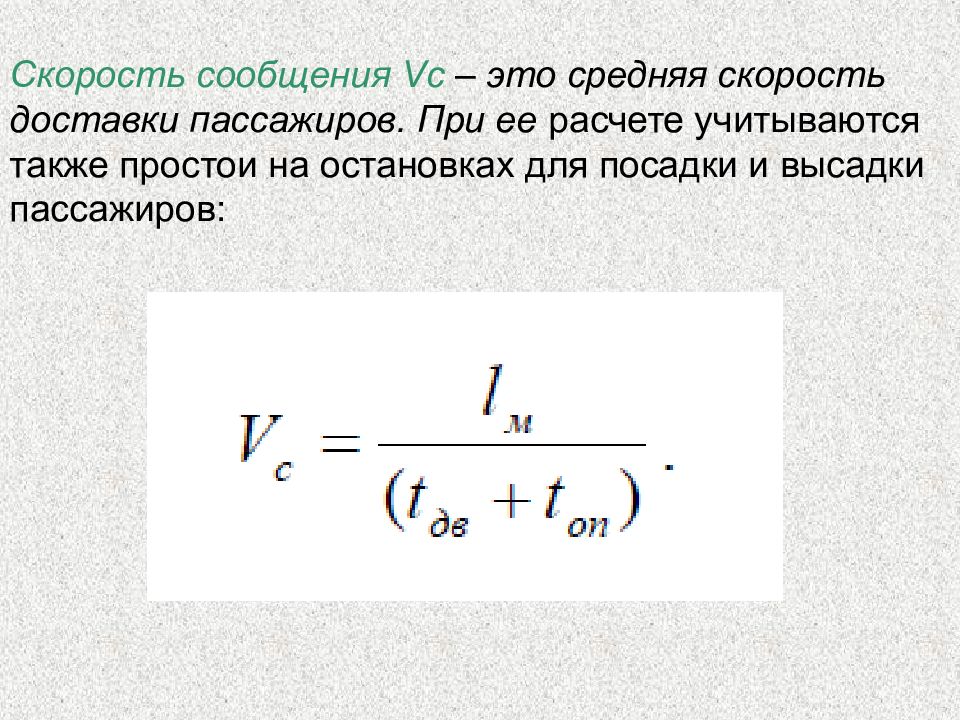
Возникновение крупных городов поставило задачу создания новых видов городского транспорта, способного быстро и надежно обеспечивать массовые перевозки пассажиров. Таким видом транспорта стали метрополитены Подземная железная дорога, представляющая тоннель с комплексом необходимых технических сооружений и устройств, не загромождая уличной дорожной сети и не имея пересечений на одном уровне, обеспечивает большую пропускную способность, регулярность и высокую эксплуатационную скорость движения поездов. [c.262]
Кривые рис. ПО, 111 и 112 показывают, что независимо от назначения продолжительности плавания судна при различных эксплуатационных скоростях расчетным режимом конден- [c.176]
Рассмотрев основные побочные явления, связанные с малыми избытками воздуха, перейдем к изложению достигаемых при этом преимуществ.

Такими показателями являются коэффициент технической готовности подвижного состава, коэффициент выпуска на линию, продолжительность работы на линии, техническая и эксплуатационная скорости, пробег и коэффициент его использования, коэффициент использования грузоподъемности, количество перевезенного груза в тоннах и выполненная работа в тонно-километрах. [c.345]
Эксплуатационная скорость. При определении этой скорости, в отличие от технической, учитывается время нахождения автомобиля в наряде, включая и время, затрачиваемое на устранение технической неисправности во время пребывания на линии, оформление документов при получении и сдачи груза, а также время простоя под погрузкой и разгрузкой. Эксплуатационную скорость определяют делением пробега автомобиля, выраженного в километрах, на время пребывания его в наряде, выраженное в часах. [c.347]
[c.347]
Например, автомобиль ГАЗ-53А за смену выполнил 165 км пробега и находился в наряде 7 ч. Эксплуатационная скорость будет равна [c.347]
Основным фактором, влияюш,им на величину эксплуатационной скорости, является время простоя автомобиля под погрузкой и разгрузкой, поэтому следует добиваться макси-
Если найденные скорости движения находятся в пределах эксплуатационных скоростей автомобиля или длины неровностей соответствуют значениям, наиболее часто встречающимся на дороге (1—3 м), то следует ожидать частого и интенсивного возбуждения колебаний автомобиля на дороге При расчете предполагают, что колебания на передней н задней подвесках происходят независимо. Между тем угловые колебания кузова могут усиливаться из-за неблагоприятного сдвига по фазе между воздействиями неровности на передние и задние колеса.
[c. 474]
474]
За последние три или четыре десятилетия технические достижения стали настолько привычными для нашего общества, что в будущем несомненны новые, более впечатляющие успехи. Появление новых материалов, необходимость повышения эксплуатационных скоростей и температур, необходимость снижения веса, уменьшения объема, увеличения сроков эксплуатации, снижения стоимости и достижения экологической совместимости — все это вызывает необходимость совершенствования методов расчета. [c.10]
| Рис. 7.55. Влияние эксплуатационной скорости V на усталостную прочность Of при 10 циклах для некоторых различных сплавов на железной основе. (Данные из работы [8, стр. 381].) 1 — сталь EN ЗОА, термически обработанная, предел прочности 160 000 фунт/дюйм 2 — сплав 2,5%Сг— Мо—W—V, закаленный в масле 3 — сплав 2,5% Сг—Мо—W—V, охлажденный на воздухе 4 — сплав 12% Ni, 25% Сг 5 — сталь EN ЗА 6 — сталь EN 8 7 — сплав 36% Ni, 12% Сг 8 — сталь EN 56А. |

Возможно, что на самолетах ближайшего будущего потребуется иметь регулируемые в полете системы поперечного управления как для создания оптимальных характеристик поперечной управляемости на всех эксплуатационных скоростях и высотах полета, так и для предотвращения в случае необходимости возможного выхода самолета на критические угловые скорости крена, обусловленные инерционным взаимодействием продольного и бокового движений самолета. Такая регулировка системы поперечного управления должна будет действовать автоматически, например, в зависимости От высоты и числа М полета. [c.103]
Предельные состояния, виды и критерии разрушения. Традиционные инженерные расчеты на прочность деталей машин и элементов конструкций при однократном нагружении основаны, с одной стороны, на номинальных напряжениях, определяемых по формулам сопротивления материалов, теории упругости и пластичности, теории пластин и оболочек и, с другой стороны, на характеристиках прочности материалов при однократном нагружении,, определяемых при стандартизированных или унифицированных испытаниях лабораторных образцов из применяемых конструкционных материалов [16].
Эксплуатационная скорость, узлы. 13 16,85 17 16,8 20.5 22 27 [c.
 116]
116]Эксплуатационной скоростью называется отношение обш,его пробега автомобилей Ь ко времени пребывания их в наряде Гн, включая время простоя под погрузкой, выгрузкой и по техническим причинам. Экс- [c.462]
Действительное время работы автомобиля на каждой передаче в коробке передач в зависимости от типа автомобиля, заданного срока службы L и средней эксплуатационной скорости определяют по логарифмической кривой, приведенной на рис. 135. Так, например, для легкового автомобиля с трехступенчатой коробкой передач время Tj, Гц и Тщ определяют по соответствующей кривой следующим образом. По оси абсцисс откладывают удельную тяговую силу на второй передаче уд,,, подсчитанную по формуле (160), и проводят вертикаль до пересечения [c.241]
Для определения производительности автобуса применяют коэффициент использования вместимости, т. е. отношение количества перевезенных пассажиров к количеству мест в салоне. Для повышения производительности автомобиля, т. е. работы, сделанной за определенное время, большое значение имеют техническая и эксплуатационная скорости.
[c.265]
е. работы, сделанной за определенное время, большое значение имеют техническая и эксплуатационная скорости.
[c.265]
Эксплуатационная скорость — это средняя скорость автомобиля за время нахождения в наряде, включая простои под погрузку, выгрузку и оформление документов. [c.266]
Средняя эксплуатационная скорость Уэ, часто используемая для оценки скоростных свойств автомобилей, является по существу не совсем корректной оценкой скоростных свойств, поскольку на этот показатель в значительной мере влияют потери времени по причинам, не относящимся к конструкции автомобиля.
Для оценки степени использования подвижного состава и выполненной им транспортной работы применяют ряд показателей коэффициенты технической готовности, выпуска, использования пробега и грузоподъемности автомобилей, время пребывания автомобилей в наряде, техническую и эксплуатационную скорости, скорость сообщения, расстояние перевозок (длина ездки с грузом), объем перевозок в тоннах и транспортную работу в тонно-километрах или пассажиро-километрах, производительность автомобиля. [c.267]
[c.267]
Эксплуатационную скорость определяют делением пробега автомобиля на время его нахождения в наряде. Например, если автомобиль в течение рабочей смены, длившейся 7 час, совершил пробег 100 км, то его эксплуатационная скорость составляет 100 7 = 14,28 км/ч. [c.269]
В 1910 г. приступили к постройке пассажирских речных теплоходов, а с 1911 г. на Коломенском заводе началось строительство винтовых грузо-пассанчирских и грузовых теплоходов, характерных большой грузоподъемностью, большими размерами и оригинальными конструктивными решениями двигательных установок. Так, на грузо-пассажирских теплоходах типа Бородино (см. табл. 15) гребные винты помещались в специальных тоннелях кормовой части судовых корпусов, обеспечивавших повышение скорости и улучшение коэффициента полезного действия винта при ограниченных глубинах фарватера грузовые теплоходы грузоподъемностью 1000 т и более ( Инженер Корейво , Ташкент , Байрам-Али и др.) имели эксплуатационную скорость до 14 км/час. [c.276]
[c.276]
Ограничения по устойчивости и управляемости обусловлены падением статической устойчивости на больших дозвуковых числах М полета. Диапазон эксплуатационных скоростей (чисел М полета) может также ограничиваться реверсом элерона, валежкой , боковой неустойчивостью и пр. [c.62]
Эксплуатационной скорости влияние на усталость 211, 212 Эксцесс (островершинность) 319 Эластика 554 Эластичности мера 106 Эластичность 105, 106 Эллиптическая зависимость 220, 221 Энергопоглощения способность при ударе 542 [c.619]При дорожных испытаниях автомобиля установлено, что минимально устойчивая скорость автомобиля определяется резонансом колебаний одноузловой формы. В двигателе возмущающая гармоника крутящего момента половинного порядка возникает в том случае, если наполнение одного из цилиндров резко отличается от наполнения других цилиндров из-за неравномерного распределения горючей смеси. Чтобы исключить возможность появления этой гармоники, при доводке автомобиля необходимо минимально устойчивую скорость уменьшить настолько, чтобы она не попадала в область эксплуатационных скоростей движения. [c.93]
[c.93]
По методике Белоруссгедго политехнического института время Г . X рекомендуется подсчитывать, исходя из средней эксплуатационной скорости автомобиля и из заданного срока службы L [c.241]
Основными технико-экономическими показателями работы автомобильного транспорта являются коэффициенты технической готовности, выпуска, использования пробега и грузоподъемности автомобилей время пребывания автомобилей в наряде, техническая и эксплуатационная скорость, объем перевозок в тоннах и транспортная работа в пас-сажиро- и тонно-километрах производительность автомобиля. [c.264]
Однако обычно при проектировании мощность двигателя, параметры трансмиссии выбирают такими, чтобы при наиболее характерных условиях эксплуатации запаса мощности было бы вполне достаточно для движения с вероятными эксплуатационными скоростями, которые всегда ниже расчетных, максимально возможных. Экспериментально установлено, что для большинства полноприводных автомобилей максимальные средние скорости даже на хороших дорогах не превышают 0,8Ута . Следует иметь в виду, что реальный процесс движения носит случайный циклический харак-
[c.155]
Следует иметь в виду, что реальный процесс движения носит случайный циклический харак-
[c.155]
Эксплуатационная скорость — Большая Энциклопедия Нефти и Газа, статья, страница 1
Эксплуатационная скорость
Cтраница 1
Эксплуатационная скорость v3 зависит от скорости движения автобусов ит и времени простоев на остановочных пунктах и конечных станциях. [1]
Эксплуатационная скорость зависит от планировки городов, длины перегона, модели автобуса, а также от простоев на конечных станциях, остановочных пунктах, между остановками, вызванными условиями движения. Значительное отклонение величины эксплуатационной скорости от плана в ту или иную сторону свидетельствует о нарушении расписания движения автобусов на линии. При анализе необходимо выяснить, на каких маршрутах и почему нарушалось расписание. Обычно колебания отчетных значений v3 от плана составляют незначительную величину. [2]
[2]
Эксплуатационная скорость о8 показывает условную среднюю скорость подвижного состава за время его нахождения на линии. [3]
Эксплуатационная скорость — это средняя скорость за время нахождения автомобиля в наряде, При определении этой скорости в отличие от технической учитывается время нахождения в наряде, включая время, затрачиваемое на устранение технической неисправности во время пребывания на линии, оформление документов при получении и сдаче груза, а также время простоев под погрузкой и разгрузкой. Эксплуатационную скорость определяют делением пробега автомобиля, выраженного в километрах, на время пребывания его в наряде, в часах. [4]
Эксплуатационная скорость зависит от всех факторов, влияющих на техническую скорость, но основное влияние на нее оказывают простои под погрузкой и разгрузкой, по организационным причинам и техническим неисправностям. [5]
[5]
Эксплуатационная скорость автомобиля зависит от его технической скорости и от длительности простоев в пунктах погрузки и разгрузки ( для автобусов — на конечных и промежуточных остановочных пунктах) и других простоев. [6]
Эксплуатационная скорость движения автомобиля определяется делением пробега автомобиля в километрах на время пребывания автомобиля в наряде. [7]
Эксплуатационную скорость определяют делением пробега автомобиля на время его нахождения в наряде. [8]
Эксплуатационную скорость определяют делением пробега автомобиля на время его нахождения в наряде, включая простои под погруз кой, разгрузкой и при оформлении документов на груз, простои, вызванные техническими неисправностями автомобиля и другими причинами. Эксплуатационная скорость автомобиля зависит от его технической скорости и от длительности простоев в пунктах погрузки и разгрузки ( для автобусов — на конечных и промежуточных остановочных пунктах) и других простоев.
[9]
Эксплуатационная скорость автомобиля зависит от его технической скорости и от длительности простоев в пунктах погрузки и разгрузки ( для автобусов — на конечных и промежуточных остановочных пунктах) и других простоев.
[9]
Эксплуатационной скоростью называется отношение общего пробега автомобилей L ко времени пребывания их в наряде Гн, включая время простоя под погрузкой, выгрузкой и по техническим причинам. [10]
Эксплуатационной скоростью Называется отношение общего пробега автомобилей L ко времени пребывания их в наряде Гн, включая время простоя под погрузкой, выгрузкой и по техническим причинам. [11]
Изменение эксплуатационной скорости, пересмотр режима работы автобусов на маршруте, сокращение нулевых пробегов отразятся на количестве рейсов, выполняемых автобусом за день. Проектное значение этого показателя определяют в следующем порядке. [12]
[12]
Увеличение эксплуатационной скорости свидетельствует об улучшении использования почасовых автомобилей. [13]
Величина эксплуатационной скорости зависит от: величины технической скорости; способа и организации выполнения погрузочно-разгрузочных работ; расстояния перевозки груза. [14]
Различают техническую и эксплуатационную скорость автомобиля, которые зависят от разных факторов. [15]
Страницы: 1 2 3 4
Технические требования для высокоскоростного подвижного состава в России
Публикации — Машиностроение
В ближайшие несколько лет в России планируется начать строительство первой специализированной высокоскоростной железнодорожной магистрали (ВСМ). Потребность в реализации такого проекта обусловлена как необходимостью развития современных видов транспорта, учитывая большие расстояния в стране, так и мировыми тенденциями. Сегодня в мире эксплуатируются более 37 тыс. км ВСМ, причем за последние 5 лет протяженность высокоскоростной железнодорожной инфраструктуры увеличилась более чем в 2 раза.
Потребность в реализации такого проекта обусловлена как необходимостью развития современных видов транспорта, учитывая большие расстояния в стране, так и мировыми тенденциями. Сегодня в мире эксплуатируются более 37 тыс. км ВСМ, причем за последние 5 лет протяженность высокоскоростной железнодорожной инфраструктуры увеличилась более чем в 2 раза.
Строительство ВСМ планируется между Москвой и Казанью. Протяженность линии – 770 км, большая часть которой проектируется на безбалластной основе под скорость 400 км/ч (искусственные сооружения – 350 км/ч). Подвижной состав – под демонстрационную скорость 400 км/ч (при сертификационных испытаниях) и максимальную эксплуатационную (перевозка пассажиров) – не более 360 км/ч.
В 2015 году были сформированы, а в 2017 году актуализированы технические требования для высокоскоростного подвижного состава. Их разработка производилась с учетом мирового опыта по эксплуатации высокоскоростных поездов, а также опыта организации движения на линии Москва – Санкт-Петербург (подвижной состав Velaro RUS, Siemens).
В настоящее время в мире немало моделей высокоскоростного подвижного состава, эксплуатационная скорость которых сопоставима с техническими требованиями для трассы ВСМ Москва – Казань (рис. 1). Однако необходимо отметить, что достижение такого скоростного режима при различных условиях внешней среды требует неодинаковых технических и технологических решений.
Рис. 1. Сравнение моделей высокоскоростного подвижного состава ведущих мировых производителей (увеличить)
Во-первых, следует учитывать климатические условия. Так, перепады температур на проектируемой трассе составляют практически 100 ºС, причем решающее значение имеют не только перепады, но и их нижнее значение – -48 ºС. Именно воздействие низких температур негативно отражается на прочностных свойствах металла, а следовательно, элементов кузова и навесного оборудования.
В странах Европы подобные климатические условия являются экстраординарными, вследствие чего подвижной состав проектируется под минимальные температуры нениже -25 ºС (Siemens Velaro E и Talgo Avril, эксплуатирующиеся преимущественно в Испании, имеют температурный режим от -20 ºС до +50 ºС). Кроме того, многими перевозчиками при неблагоприятных погодных условиях скорость движения поезда снижается. Во Франции SNCF накладывает ограничения в зависимости от количества осадков (снега), уменьшая скорости до 230 км/ч; в Германии (Deutsche Bahn) – с 300 км/ч до 200 км/ч в периоды снегопада, чтобы минимизировать возможность возникновения нештатной ситуации и повреждения подвижного состава; в Испании (Renfe) – с 300 км/ч до 230 км/ч (или до 160 км/ч) в зависимости от погодных условий. Только в Китае высокоскоростной подвижной состав эксплуатируется в схожих с нашими климатических условиях. Открытая в 2012 году линия Харбин –Далянь проходит через холодный регион, перепады температур в котором составляют от -40 ºС до +40 ºС. На линии перевозки пассажиров осуществляются в подвижном составе CRh480B, который способен в постоянной эксплуатации развивать скорость до 380 км/ч. Однако из-за жестких погодных условий, а также скоростных ограничений, введенных Министерством железных дорог Китая после крупной аварии на линии ВСМ в 2011 году, подвижной состав на этой линии эксплуатируется с максимальной скоростью 300 км/ч в летнее время и не более 200 км/ч – в зимнее.
Кроме того, многими перевозчиками при неблагоприятных погодных условиях скорость движения поезда снижается. Во Франции SNCF накладывает ограничения в зависимости от количества осадков (снега), уменьшая скорости до 230 км/ч; в Германии (Deutsche Bahn) – с 300 км/ч до 200 км/ч в периоды снегопада, чтобы минимизировать возможность возникновения нештатной ситуации и повреждения подвижного состава; в Испании (Renfe) – с 300 км/ч до 230 км/ч (или до 160 км/ч) в зависимости от погодных условий. Только в Китае высокоскоростной подвижной состав эксплуатируется в схожих с нашими климатических условиях. Открытая в 2012 году линия Харбин –Далянь проходит через холодный регион, перепады температур в котором составляют от -40 ºС до +40 ºС. На линии перевозки пассажиров осуществляются в подвижном составе CRh480B, который способен в постоянной эксплуатации развивать скорость до 380 км/ч. Однако из-за жестких погодных условий, а также скоростных ограничений, введенных Министерством железных дорог Китая после крупной аварии на линии ВСМ в 2011 году, подвижной состав на этой линии эксплуатируется с максимальной скоростью 300 км/ч в летнее время и не более 200 км/ч – в зимнее.
Во-вторых, ведущие мировые производители проектируют высокоскоростной подвижной состав под ширину колеи 1435 мм, вследствие чего габаритные показатели таких поездов меньше, чем требуется российскими нормативами. В соответствии с государственным стандартом ширина вагона электропоезда в России должна составлять не менее 3,75 м, в то время как в мире эксплуатируется подвижной состав с шириной около 3 м. Только Talgo Avril спроектирован под различную ширину колеи (от 1435 мм до 1668 мм), однако и у данного подвижного состава габаритные показатели ниже (ширина вагона – 3,2 м). Доработка технологической платформы Talgo под технические требования ВСМ Москва – Казань потребовала бы внесения существенных изменений в конструкцию подвижного состава из-за того, что длина пассажирского вагона Talgo 350 и Talgo Avril составляет 13 м, в то время как вагоны проектируемого в России высокоскоростного подвижного состава будут более 25 м. Другие мировые производители высокоскоростного подвижного состава проектируют пассажирские вагоны приблизительно с теми же параметрами по ширине.
В-третьих, сегодня мировые тенденции направлены на минимизацию нагрузки от осей колесных пар подвижного состава на железнодорожную инфраструктуру. Высокоскоростная магистраль Москва – Казань проектируется под осевые нагрузки 17 тс. При этом в увеличенных российских габаритах вагонов и более жестких климатических условиях решение по разработке подвижного состава под такую осевую нагрузку является беспрецедентным и сопряжено с необходимостью проектирования кузова и внутреннего оборудования поезда с применением композитных или облегченных материалов, что может отразиться на стоимости такого подвижного состава. В-четвертых, реализация ВСМ в России предполагает эксплуатацию подвижного состава на переменном и постоянном родах тока. Это связано с особенностями организации движения на проектируемой трассе (Московский транспортный узел электрифицирован на постоянном токе, в то время как выделенная инфраструктура проектируется под переменный с учетом скоростей движения до 400 км/ч). Из всех представленных на рынке моделей высокоскоростных поездов, сопоставимых по скоростному режиму с техническими требованиями к подвижному составу ВСМ Москва – Казань, двухсистемными являются AGV 575 (Alstom) и Zefiro V300 (Bombardier), курсирующие в Италии. Несмотря на то что максимальная эксплуатационная скорость составляет 360 км/ч, как и в требованиях к подвижному составу ВСМ Москва – Казань, в настоящее время на всей железнодорожной инфраструктуре Италии данные виды подвижного состава не развивают скорости более 300 км/ч (инфраструктура страны не сертифицирована под скорости выше). Это лишний раз доказывает актуальность принятого решения по проектированию и сертификации инфраструктуры линии Москва – Казань с запасом, то есть на скорости 400 км/ч, даже с учетом того, что подвижной состав планируется под меньшую эксплуатационную скорость.
Несмотря на то что максимальная эксплуатационная скорость составляет 360 км/ч, как и в требованиях к подвижному составу ВСМ Москва – Казань, в настоящее время на всей железнодорожной инфраструктуре Италии данные виды подвижного состава не развивают скорости более 300 км/ч (инфраструктура страны не сертифицирована под скорости выше). Это лишний раз доказывает актуальность принятого решения по проектированию и сертификации инфраструктуры линии Москва – Казань с запасом, то есть на скорости 400 км/ч, даже с учетом того, что подвижной состав планируется под меньшую эксплуатационную скорость.
Остальные производители высокоскоростного подвижного состава (для скоростей свыше 250-300 км/ч) сосредотачиваются на одном роде тока – переменном. По приблизительным оценкам оборудование подвижного состава на переменном и постоянном родах тока удорожает его конечную стоимость до 10% (ориентировочно 1-2 млн евро от стоимости поезда). Однако перевод действующей на постоянном токе инфраструктуры, как в Московском транспортном узле, на переменный ток существенно превышает затраты на реализацию двух систем электроснабжения на поезде, не говоря уже о технической сложности данного проектного решения.
Стоит отметить, что в мировой практике существует решение, альтернативное реализации двух систем переменного и постоянного тока на подвижном составе, укладка двух параллельных путей на переменном и постоянном токе. В частности, в Берлине реализовано данное проектное решение, позволяющее эксплуатировать одновременно электричку S-Bahn (постоянный ток) и поезд ВСМ (переменный ток). При этом реализация данного проектного решения на инфраструктуре Московского транспортного узла технически сложна, так как потребуется полная замена тягового электроснабжения, а также линии СЦБ и связи. Между тем в Германии используется другое напряжение на постоянном и переменном токе – 15 kV AC 16,7 Hz, 750V DC. Соответственно, при проектировании в Московском транспортом узле параллельных путей на переменном и постоянном родах тока наводка переменного тока в сети постоянного может достигать 3 kV, что, учитывая уже имеющиеся 3 kV на линии тягового электроснабжения, совершенно недопустимо.
Еще одной отличительной особенностью технических требований к высокоскоростному подвижному составу для трассы ВСМ Москва – Казань является опциональное требование по установке вихретокового тормоза. В настоящее время его использование широко не распространено в мировой практике ВСМ: с таким тормозным оборудованием поставляются поезда ICE 3 (Deutche Bahn) и некоторые модели японских Shinkansen, максимальная эксплуатационная скорость которых – 320-330 км/ч. Наибольшая эффективность использования вихретоковых тормозов возникает при существенных уклонах продольного профиля пути (40‰) и скоростях движения свыше 350 км/ч. Однако с эксплуатацией вихретоковых тормозов связан ряд рисков. Учитывая то, что их работа сопровождается нагревом рельса, использование данного тормозного оборудования может приводить к нарушению стабильности пути. Эксплуатация может также нарушать работу или даже выводить из строя компоненты устройств системы СЦБ. Исходя из этого, окончательное решение об установке вихретокового тормоза на поезда ВСМ будет принято на стадии проектирования.
Сегодня ни один производитель высокоскоростного подвижного состава не выпускает модель, которую можно было бы без дополнительной доработки эксплуатировать по сформированным российским техническим требованиям.
Нормативно-правовая база
В настоящее время в России отсутствуют государственные стандарты, регулирующие высокоскоростные железнодорожные перевозки. Действуют только специальные технические условия, разработанные индивидуально для трассы ВСМ Москва – Казань и устанавливающие требования только к инфраструктуре. Соответственно, при разработке технических требований на высокоскоростной подвижной состав активно использовался зарубежный опыт проектирования. В частности, были взяты на вооружение нормы Евросоюза TSI, последний раз актуализированные в 2014 году. По данным нормативам в настоящее время конструируется подвижной состав не только в Европе, но и в США. При этом в Америке высокоскоростные железнодорожные перевозки пока отсутствуют (высокоскоростной подвижной состав Acela Express не развивает скорости выше 250 км/ч, потому что эксплуатируется не на высокоскоростной, а на обычной (реконструированной) инфраструктуре) и ситуация с собственной нормативно-правовой базой, регулирующей высокоскоростное движение, обстоит относительно так же, как и в Российской Федерации. Только в конце 2016 года Федеральным железнодорожным агентством США (FRA) был утвержден проект законодательного акта, регламентирующего требования к высокоскоростному подвижному составу с максимальной эксплуатационной скоростью свыше 350 км/ч.
Нормы Евросоюза были использованы в части нормативов работы тормозного и тягового оборудования, так как российский государственный стандарт регламентирует тормозные расстояния только для скоростей движения до 300 км/ч, а также только при благоприятных погодных условиях и чистых сухих рельсах. Однако нормы Евросоюза устанавливают тормозные расстояния как при благоприятных, так и при неблагоприятных погодных условиях или при входе в юз колесных пар и срабатывании противоюзных устройств. Учитывая также опыт работы поездов Velaro D на трассе Москва – Санкт-Петербург, для подвижного состава на трассе Москва – Казань были разработаны тормозные пути и при неблагоприятных условиях эксплуатации (табл. 1).
Табл. 1. Отечественные и международные стандарты в области перевозок и эксплуатации (увеличить)
Тот же подход был применен и при разработке требований к тормозному коэффициенту сцепления: государственным стандартом России регламентированы коэффициенты до скорости 300 км/ч, а для разработки технических требований свыше 300 км/ч использованы стандарты Евросоюза.
Техническими требованиями на подвижной состав трассы Москва – Казань устанавливаются более жесткие условия по экологии и безопасности пассажиров на платформе от шумового воздействия по сравнению со стандартами Евросоюза и требованиями США. В частности, предельный уровень шума от проследования поезда составляет 84 дБа, однако это требование актуально при реализации 2/3 от максимальной эксплуатационной скорости, то есть приблизительно при 250 км/ч (требования во всем диапазоне скоростного режима будут установлены производителем). В качестве сравнения: для сопоставимых скоростей движения TSI регламентирует уровень шума 87 дБа, а требования к высокоскоростному подвижному составу в США – 88 дБа.
Технические требования регламентируют основную составность поезда – 12 вагонов с возможностью увеличения до 16 путем включения дополнительных. Также предусматривается еще один вариант составности – 8 вагонов с возможностью эксплуатации по системе многих единиц (8+8), что больше соответствует мировому опыту организации движения на инфраструктуре ВСМ. Предлагаемая вариативность позволяет подстроить подвижной состав под условия изменяющейся внешней среды, в частности при изменении пассажиропотоков и интенсивности эксплуатации линии ВСМ.
Ситуация с локализацией
Для линии ВСМ Москва – Казань предполагается поэтапно локализовать производство более 30 единиц 12-вагонного высокоскоростного подвижного состава, доведя в конечном итоге уровень локализации до 60-80%.
В настоящее время в мире немного примеров локализации производства высокоскоростного подвижного состава. Бóльшая часть находится в Китае. В 2009 году Bombardier локализовала в Китае практически 100% производства подвижного состава модели Zefiro380 (под наименованием CRh480D), а ранее там было локализовано производство высокоскоростного подвижного состава Velaro (выпускался под наименованием CRh4). Следует обратить внимание на то, что после успешных примеров по локализации производства Китай начал проектировать и разрабатывать собственный подвижной состав. В 2017 году в эксплуатацию поступил первый китайский сертифицированный высокоскоростной подвижной состав CR400AF.
Таким образом, локализация производства способствует реализации целей и задач Стратегии развития транспортного машиностроения России до 2030 года, а впоследствии – Стратегии развития экспорта железнодорожного машиностроения России.
Ю. З. Саакян, к.ф-м.н., генеральный директор ИПЕМ
В. Б. Савчук, заместитель генерального директора ИПЕМ
С. С. Оленин, ведущий эксперт-аналитик отдела комплексных исследований ИПЕМ
№ 3 (39) август 2017
Также по теме:
ГУП «Московский метрополитен»
Московский метрополитен (Государственное унитарное предприятие города Москвы «Московский ордена Ленина и ордена Трудового Красного Знамени метрополитен имени В.И. Ленина»), открытый 15 мая 1935 года, — это основа транспортной системы столицы. Он надежно связывает центр города с промышленными районами и жилыми массивами. На сегодняшний день доля Московского метрополитена в перевозке пассажиров среди предприятий городского пассажирского транспорта столицы составляет около 56%.
Радиально-кольцевая структура Московского метрополитена воспроизводит исторически сложившуюся планировку Москвы. Линии метрополитена протянулись от центра города к его окраинам, обеспечивая пассажиров надежным и быстрым транспортом. Средняя дальность одной поездки в метро составляет около 14,5 километра. В среднем в будни услугами метрополитена пользуются 9 миллионов пассажиров.
Ежедневно по 15 линиям метрополитена (включая Московское центральное кольцо (МЦК) и Московскую монорельсовую транспортную систему) с 278 станциями (241 станция метро, 31 станция МЦК и 6 станций монорельса) пропускается более 12 тысяч поездов.
Только метрополитен может обеспечить быструю доставку большого количества пассажиров из одного района Москвы в другой. 25% станций метро испытывают суммарную суточную нагрузку более 50 тысяч пассажиров. Наиболее загруженными на сегодняшний день являются станции Комсомольская (Кольцевая линия), Новогиреево, Щелковская, Выхино, Новокосино, ВДНХ, Бауманская, через которые ежедневно проходят от 80 до 138 тысяч человек.
Средняя эксплуатационная скорость поездов Московского метрополитена (с учетом остановок) составляет около 41,61 км/ч. При этом обеспечивается высокая регулярность движения поездов с минимальным интервалом — 90 секунд.
По интенсивности движения, надежности и объемам перевозок Московский метрополитен стабильно занимает 1 место в мире. Он в первой тройке метрополитенов мира практически по всем другим показателям.
Высокая регулярность движения и надежность работы столичного метрополитена достигается благодаря работе 67-тысячного коллектива, а также применению современных технологий и новой техники, которые внедряются в том числе и с использованием передового международного опыта крупнейших транспортных компаний мира. Этому способствует активная работа метрополитена в таких международных транспортных организациях, как Международный союз общественного транспорта (МСОТ), объединяющего более 2 тысяч компаний — транспортных операторов из 80 стран мира, клуб крупнейших метрополитенов мира (КоМЕТ), а также ассоциации «Метро», объединяющая метрополитены России и СНГ.
| Грузоподъёмность, т, не более | 71 |
| Масса тары, т | 28,5±0,5 |
| Минимальная допустимая масса тары в эксплуатации, т | 26,6 |
| Количество осей, шт | 4 |
| Максимальная расчетная статическая нагрузка от колесной пары на рельсы, кН (тс) | 245 (25) |
| Статическая погонная нагрузка, кН/м (тс/м) | 81,614 (8,319) |
| Геометрический объем кузова, м³ | 40 |
| Объём перевозимого груза (с горкой), м³ | 45 |
| Длина вагона по осям сцепления автосцепок, мм | 12020+43-20 |
| База вагона, мм | 7800±5 |
| Высота вагона от уровня головок рельсов, мм | 3384 |
| Длина рамы по концевым балкам, мм | 10800 |
| Ширина вагона, мм | 3200 |
| Размеры кузова внутри, мм | |
| — длина на уровне пола | 9949 |
| — длина на уровне верхней обвязки борта | 10312 |
| — ширина | 2876 |
| — высота | 1375 |
| Угол наклона кузова при разгрузке, градус, не менее | 45 |
| Угол перелома борта по отношению к кузову, градус | 3 — 11 |
| Расчетная ударная нагрузка | 2т с высоты 2м на подсыпку не менее 300мм |
| Система разгрузки | Пневматическая |
| Вид разгрузки | Двухсторонняя |
| Рабочее давление в цилиндрах разгрузки, МПа | от 0,4 до 0,7 |
| Количество цилиндров опрокидывания, шт. | 4 |
| Габарит по ГОСТ 9238 | |
| — кузова | 1-Т |
| — тележки | 02-ВМ |
| Конструкционная скорость, км/ч | 120 |
| Допускаемая эксплуатационная скорость по путям промышленного транспорта, км/ч, не более: | |
| — в порожнем состоянии | 100 |
| — в груженом состоянии | 90 |
| Допускаемая эксплуатационная скорость вагона в груженом состоянии по путям промышленного транспорта, км/ч, не более | 70 |
| Тип автосцепки | СА-3 |
| Модель подкатываемой тележки | 18-194-1 тип 3 по ГОСТ 9246 и ТУ 3183-136-07518941-2006 |
| Максимальный коэффицинт тары | 0,41 |
| Минимальный радиус кривой для прохождения одиночного вагона, м | 60 |
| Минимальный радиус кривой, проходимый вагоном в сцепе, м | 80 |
| Высота оси автосцепок от уровня головки рельса, мм | 1040-1080 |
Эксплуатационная техника Западного скоростного диаметра к зимнему периоду готова
На технологической площадке Северного участка Западного скоростного диаметра состоялся смотр готовности специальной техники к зимнему периоду эксплуатации Западного скоростного диаметра.
В рамках мероприятия было представлено более 100 единиц техники и несколько сот единиц навесного оборудования, с помощью которых производится обслуживание магистрали.
В соответствии с Соглашением о государственно-частном партнёрстве МСС принимает обязательства по строительству Центрального участка и эксплуатации (уборка, текущий и капитальный ремонт конструкций магистрали) действующих участков ЗСД.
Для решения эксплуатационных задач компанией был создан парк многофункциональной уборочной, ремонтной и транспортной техники, насчитывающий более 100 единиц современных машин и механизмов.
В ходе проведения смотра техники проверяется комплектность и состояние основного парка техники и оценивается степень готовности к осуществлению всех видов работ по обслуживанию Западного скоростного диаметра, установленных регламентами.
Руководство Оператора уверено, что высокий класс технического оснащения магистрали позволяет содержать дорогу в должном состоянии и подтверждает статус ЗСД как одной из самых безопасных и комфортных скоростных магистралей.
Несмотря на готовность эксплуатационных служб, не забывайте, что моментально нейтрализовать негативные последствия непогоды невозможно.
Пожалуйста, следуйте рекомендациям:
- используйте резину автомобиля, соответствующую сезону,
- строго соблюдайте Правила дорожного движения, руководствуйтесь информацией, выводимой на знаках переменной информации и на табло переменной информации ЗСД, не превышайте скорость,
- выбирайте скорость движения, трезво оценивая свой водительский опыт, состояние транспортного средства и проезжей части, скорость должна быть комфортной и позволяющей Вам полностью контролировать ситуацию,
- будьте предельно внимательны и осторожны!
Желаем Вам приятных и безопасных поездок!
Ваш, ЗСД.
Мурманский транспортный филиал ПАО «ГМК «Норильский никель»
ОПИСАНИЕ КРАНОВЫХ СУДОВ ФЛОТА ПАО «ГМК «НОРИЛЬСКИЙ НИКЕЛЬ»
1. Общие сведения
| Название | Норильский Никель / Norilskiy Nickel | Талнах / Talnakh | Надежда / Nadezhda |
| Флаг | Россия / Russia | ||
| ИМО номер | 9330836 | 9404039 | 9404041 |
| Порт приписки | Мурманск / Murmansk | ||
| Классификационное общество | РМРС | ||
| Класс судна | КМ * Arc7 1 АUT2 (Arc7 при d<9.0 м) | ||
| Регистровый номер РМРС | 050175 | 080170 | 080255 |
| Число, месяц и год постройки | 28.02.2006 г. | 11.12.2008 г. | 28.01.2009 г. |
| Место постройки | Хельсинки, Финляндия | Висмар, Германия | Висмар, Германия |
| Район плавания | Неограниченный | ||
| Район плавания по радиооборудованию | А1,А2,А3,A4 | ||
| Эксплуатационная скорость | 12,5 уз. | ||
2. Основные размерения
| Длина наибольшая | 169,04 м |
| Длина МПП (регистровая) | 157,74 м |
| Ширина наибольшая | 23,10 м (ширина габаритная 26,45 м) |
| Высота борта (от киля до ГП) | 14,20 м |
| Дедвейт по летнюю грузовую марку | 18 095 тонн |
| Дедвейт по арктическую осадку | 14 538 тонн |
| Тоннаж: | |
| Брутто | 17031 / 17029 (дэ Надежда) тонн |
| Нетто | 5257 тонн |
| Водоизмещение судна | 29137 тонн |
| Высота надводного борта по летнюю марку | 14,20 м |
| Поправка на пресную воду | 202 мм (кроме «лесного» надводного борта) |
| Осадка по летнюю грузовую марку | 10,0 м |
| Осадка арктическая | 9,0 м |
| Количество тонн на 1 см осадки | 36,20 (на осадку 10,0 м) |
| Вес судна порожнем | 11 041,4 тонн |
3. Вместимость трюмов
| Трюм № 1 | 1600 куб. м |
| Трюм № 2 | 4500 куб. м |
| Трюм № 3 | 6200 куб. м |
| Трюм № 4 | 6200 куб. м |
| ИТОГО: | 18500 куб. м |
4. Размеры трюмов
5. Контейнерная вместимость
6. Нагрузки
7. Грузовые краны
| Судовые краны LIEBHER | 2 шт. |
| Грузоподъемность 45 тн. | вылет 28 м |
| Грузоподъемность 34 тн. | вылет 37 м |
8. Силовая установка
| Тип силовой установки | Дизель-электрическая | |||
| Главные двигатели: | ||||
| Количество | 3 штуки | |||
| Тип | Wartsila 12V32 | |||
| Количество цилиндров | 12 | |||
| Обороты | 750 об/мин | |||
| Главные генераторы: | ||||
| Тип | AMG1120LSO8LSE | |||
| Количество | 3 штуки | |||
| Номинальная мощность | 8314 kVA | |||
| Мощность | 5820 кВт | |||
| Частота | 50 Гц | |||
| Ток | 727 А | |||
| Обороты | 750 об/мин | |||
| Вес | 33600 кг | |||
| Портовый дизель генератор | 1 комплект | |||
| Аварийный дизель – генератор | 1 комплект | |||
9. Пропульсивная установка
| Тип | Азимутальный |
| Гребной электродвигатель | 1 штука |
| Мощность | 13000 кВт |
| Обороты | 0-148 об/мин |
% PDF-1.4 % 704 0 объект > эндобдж xref 704 116 0000000016 00000 н. 0000002672 00000 н. 0000002926 00000 н. 0000004672 00000 п. 0000004846 00000 н. 0000004930 00000 н. 0000005087 00000 н. 0000005224 00000 н. 0000005370 00000 п. 0000005431 00000 н. 0000005535 00000 н. 0000005596 00000 н. 0000005723 00000 п. 0000005845 00000 н. 0000005906 00000 н. 0000006066 00000 н. 0000006127 00000 н. 0000006280 00000 н. 0000006341 00000 п. 0000006480 00000 н. 0000006541 00000 н. 0000006671 00000 н. 0000006732 00000 н. 0000006852 00000 н. 0000006913 00000 н. 0000007094 00000 н. 0000007155 00000 н. 0000007284 00000 н. 0000007345 00000 н. 0000007466 00000 н. 0000007527 00000 н. 0000007588 00000 н. 0000007649 00000 н. 0000007830 00000 н. 0000008016 00000 н. 0000008077 00000 н. 0000008167 00000 н. 0000008264 00000 н. 0000008325 00000 н. 0000008386 00000 н. 0000008541 00000 н. 0000008602 00000 н. 0000008719 00000 п. 0000008828 00000 н. 0000008889 00000 н. 0000009012 00000 н. 0000009073 00000 н. 0000009247 00000 н. 0000009308 00000 п. 0000009369 00000 н. 0000009550 00000 н. 0000009610 00000 п. 0000009706 00000 н. 0000009814 00000 н. 0000009875 00000 п. 0000010001 00000 п. 0000010062 00000 п. 0000010202 00000 п. 0000010263 00000 п. 0000010388 00000 п. 0000010449 00000 п. 0000010556 00000 п. 0000010617 00000 п. 0000010733 00000 п. 0000010793 00000 п. 0000010908 00000 п. 0000010968 00000 п. 0000011076 00000 п. 0000011136 00000 п. 0000011196 00000 п. 0000011297 00000 п. 0000011357 00000 п. 0000011462 00000 п. 0000011568 00000 п. 0000011628 00000 п. 0000011739 00000 п. 0000011799 00000 п. 0000011912 00000 п. 0000011972 00000 п. 0000012032 00000 н. 0000012134 00000 п. 0000012194 00000 п. 0000012296 00000 п. 0000012356 00000 п. 0000012472 00000 п. 0000012532 00000 п. 0000012651 00000 п. 0000012711 00000 п. 0000012833 00000 п. 0000012893 00000 п. 0000013044 00000 п. 0000013104 00000 п. 0000013285 00000 п. 0000013345 00000 п. 0000013442 00000 п. 0000013501 00000 п. 0000013614 00000 п. 0000013711 00000 п. 0000013809 00000 п. 0000013916 00000 п. 0000014019 00000 п. 0000014069 00000 п. 0000014119 00000 п. 0000014180 00000 п. 0000014367 00000 п. 0000014677 00000 п. 0000015480 00000 п. 0000015661 00000 п. 0000016567 00000 п. 0000016878 00000 п. 0000017684 00000 п. 0000020195 00000 п. 0000022145 00000 п. 0000024195 00000 п. 0000002990 00000 н. 0000004649 00000 п. трейлер ] >> startxref 0 %% EOF 705 0 объект > / Метаданные 703 0 R >> эндобдж 706 0 объект > эндобдж 818 0 объект > поток HU} lU ݶ] U @ Msm) h / ږ ^ @ A4ZcTA {n ߂ TzW \ ЊbbH @@@ Br «c4! #Wso f
Рабочая скорость — обзор
Традиционно асинхронные двигатели использовались как двигатели с почти постоянной скоростью. , которые эксплуатируются путем прямого подключения к электросети.Однако из-за их низкой стоимости и прочности асинхронные двигатели также используются для приводов с регулируемой скоростью во многих приложениях.
3.1.8.1 Контроль скольжения
При постоянной частоте статора скорость асинхронного двигателя может изменяться в зависимости от скольжения. Скольжение можно изменить, изменяя напряжение статора или сопротивление ротора.
Во-первых, давайте посмотрим на управление скоростью путем изменения напряжения статора. Как видно из уравнения. (3.34) крутящий момент, развиваемый асинхронным двигателем, пропорционален квадрату напряжения статора как
(3.56) Tmech = 1ωsVs2 (Rs + Rrs) 2 + j (Xls + Xlr) 2Rrs∝Vs2
На рис. 3.40 показано изменение кривой скорость – крутящий момент в зависимости от напряжения статора. Мы видим, что регулирование скорости путем изменения напряжения статора доступно только в ограниченном диапазоне. Диапазон регулируемой скорости зависит от значения скольжения (т. Е. Максимального скольжения), при котором возникает максимальный крутящий момент. Сравнивая рис. 3.40A с рисунком B, мы видим, что двигатели конструкции C или D имеют более широкий диапазон регулирования скорости, чем двигатели конструкции A или B.
Рисунок 3.40. Характеристики крутящего момента в зависимости от изменения напряжения статора. (A) двигатель конструкции A или B и (B) двигатель конструкции C или D.
Теперь давайте рассмотрим регулирование скорости путем изменения сопротивления ротора. Из раздела 3.1.4.3 видно, что скольжение, при котором возникает максимальный крутящий момент, пропорционально сопротивлению ротора Rr как
(3,57) smax = RrRs2 + (Xls + Xlr) 2∝Rr
Таким образом, изменение ротора сопротивление изменит форму кривой скорость – крутящий момент и, в свою очередь, отрегулирует рабочую скорость двигателя.На рис. 3.41 показаны кривые скорость – крутящий момент для различных сопротивлений ротора.
Рисунок 3.41. Регулировка скорости путем изменения сопротивления ротора.
Для управления скоростью путем изменения сопротивления ротора нам необходимо использовать асинхронные двигатели с фазным ротором. Сопротивление ротора в асинхронных двигателях с фазным ротором можно изменять, добавляя внешний реостат или блок резисторов к обмоткам ротора через контактные кольца. Изменение значения реостата изменит рабочую скорость двигателя.Подобно методу изменения приложенного напряжения, метод изменения сопротивления ротора также дает ограниченный регулируемый диапазон скорости. Более того, добавление дополнительных сопротивлений в цепь ротора серьезно снижает эффективность привода.
В методах управления скоростью с изменением напряжения статора или сопротивления ротора считается, что скорость изменяется путем изменения скольжения при постоянной частоте статора. Как видно из уравнения. (3.46), поскольку КПД асинхронных двигателей зависит от рабочего скольжения, снижение скорости этими методами приведет к снижению КПД.Тем не менее, эти методы управления скоростью применимы к малогабаритным двигателям, которые приводят в действие нагрузки, требующие крутящего момента, пропорционального квадрату рабочей скорости, например вентиляторы или нагнетатели. Для таких нагрузок, поскольку потребление энергии значительно снижается в соответствии со снижением скорости, снижение эффективности относительно невелико.
Вместо того, чтобы тратить энергию на сопротивление ротора (называемое энергией скольжения ), существует лучший подход к повышению эффективности, который известен как система рекуперации энергии скольжения .В системе рекуперации энергии скольжения энергия скольжения может возвращаться обратно в источник электроэнергии. Существует два типа систем рекуперации энергии скольжения: приводная система Kramer и приводная система Scherbius . В этих системах вместо внешних резисторов используется силовой электронный преобразователь, подключенный к цепи ротора. Такая система может рекуперировать энергию, отбираемую от ротора, через контактные кольца, чтобы снизить скорость и вернуть ее в источник питания.
3.1.8.2 Синхронное управление скоростью
Ротор асинхронного двигателя следует за магнитным полем статора, которое вращается с синхронной скоростью, пропорциональной приложенной частоте статора. Таким образом, изменение частоты статора более важно для регулирования скорости. Соотношение между синхронной скоростью ns и частотой статора fs составляет
(3,58) ns = 120 · fsP
Хотя синхронную скорость можно изменить путем изменения числа полюсов, это требует сложной конструкции двигателя.Более того, невозможно обеспечить непрерывное изменение синхронной скорости. Таким образом, более эффективно изменять частоту статора. Характеристики скорости-момента для изменения частоты статора при номинальном напряжении статора показаны на рис. 3.42.
Рисунок 3.42. Кривые скорости-момента для нескольких частот (5-сильный четырехполюсный двигатель).
При изменении частоты статора для регулировки скорости, если напряжение статора остается постоянным, то изменения частоты статора приводят к изменению развиваемого крутящего момента, а также рабочей скорости, как показано на рис.3.42. Объяснение таково.
В нормальных рабочих условиях, поскольку падение напряжения на сопротивлении статора и реактивное сопротивление утечки пренебрежимо мало по сравнению с приложенным напряжением, крутящий момент по формуле. (3.34) можно упростить до
(3.59) Tmech≅Vs2 (Rrs) 2+ (ωsLlr) 2 · Rrωss = (Vsωs) 2RrωslRr2 + (ωslLlr) 2
Видно, что при фиксированных напряжении статора и частоте скольжения , развиваемый крутящий момент обратно пропорционален квадрату частоты статора. Из уравнения.Из уравнения (3.17) видно, что поток в воздушном зазоре зависит от отношения напряжения статора Vs к частоте статора fs как
(3.60) ϕ∝Esfs≈Vsfs (← Es = 4.44fsNsϕKωs)
Таким образом, при при фиксированном напряжении статора магнитный поток в воздушном зазоре обратно пропорционален частоте статора. Как видно из уравнения. Согласно (3.59) развиваемый крутящий момент пропорционален квадрату магнитного потока в воздушном зазоре и, следовательно, обратно пропорционален квадрату частоты статора.
На ток ротора также влияет изменение частоты статора.Предполагая, что при нормальных условиях эксплуатации сопротивление статора и реактивное сопротивление утечки незначительны, ток ротора изменяется обратно пропорционально частоте статора как
(3.61) Ir = Vs (Rrs) 2+ (Xlr) 2 = (Vsωs) ωslRr2 + (ωslLlr ) 2∝1fs
При регулировке рабочей скорости путем изменения частоты статора, если напряжение статора изменяется линейно с частотой, как показано на рис. 3.43, то поток в воздушном зазоре ϕ≈Vs / fs останется постоянным и, следовательно, , крутящий момент и ток ротора останутся неизменными.Этот метод называется постоянным напряжением в соответствии с Hertz ( V / f ) control , который сегодня стал популярным приводом с регулируемой скоростью для асинхронных двигателей общего назначения. Соотношение V, / f можно регулировать в соответствии с приводимой нагрузкой.
Рисунок 3.43. Постоянное напряжение на герц ( В, / f ).
На низких частотах ниже нескольких герц из-за влияния падения напряжения на сопротивлении статора и реактивном сопротивлении утечки величина напряжения статора, определяемая этим линейным соотношением В, / f , будет недостаточна для сохранения величина постоянной потока в воздушном зазоре.Это связано с тем, что фактический поток ϕ в воздушном зазоре пропорционален не Vs / fs, а Es / fs. Это приводит к уменьшению магнитного потока в воздушном зазоре и, в свою очередь, уменьшению крутящего момента на выходе. Таким образом, для постоянного управления В / f на низкой рабочей частоте мы должны повысить напряжение статора, чтобы компенсировать падение напряжения на сопротивлении статора и реактивном сопротивлении утечки, как показано на рис. 3.43.
На рис. 3.44 показаны кривые характеристики скорость – крутящий момент для нескольких частот при постоянном регулировании В, / f .Подводя итог, при постоянной В / f работа асинхронного двигателя,
Рисунок 3.44. Кривые скорость – крутящий момент с постоянным напряжением для контроля Герца (5 л.с., четыре полюса).
- •
Крутящий момент не зависит от частоты статора,
- •
Ток ротора не зависит от частоты статора,
- •
Синхронная скорость пропорциональна частоте статора.
Постоянное регулирование В, / f может использоваться для регулирования скорости ниже номинальной.Если частота статора увеличивается больше, чем номинальная частота, постоянное соотношение В, / f не может поддерживаться из-за ограничения приложенного напряжения. Таким образом, для скоростей, превышающих номинальную, максимальный крутящий момент будет уменьшен из-за уменьшения потока в воздушном зазоре. Метод управления для высоких скоростей, превышающих номинальную, будет более подробно рассмотрен в главе 8.
В приводах с асинхронным двигателем с постоянным управлением В, / f следует отметить, что крутящий момент и ток ротора определяются только угловой частотой скольжения ωsl (= sωs).Из рис. 3.44 видно, что выходной крутящий момент может быть одинаково произведен на любой скорости при одной и той же частоте скольжения. Таким образом, даже несмотря на то, что скорость уменьшается на частоту статора, рабочее скольжение может поддерживаться низким, так что эффективность не может ухудшаться в отличие от управления скольжением. Более того, при запуске высокий пусковой крутящий момент может быть достигнут за счет применения низкой частоты статора, не требуя высокого сопротивления ротора. После запуска частота статора увеличивается вместе с напряжением статора в соответствии с линейным соотношением В, / f .
До этого момента мы обсуждали регулирование скорости без обратной связи по частоте статора. Однако при управлении скоростью без обратной связи на установившуюся скорость может влиять изменение нагрузки, поскольку рабочая частота скольжения зависит от нагрузки. В частности, в области низких скоростей изменение рабочей частоты скольжения может вызвать большую ошибку в установившейся скорости. Таким образом, это регулирование скорости без обратной связи требует соответствующей компенсации, чтобы компенсировать ошибку скорости в соответствии с изменением нагрузки.Более точное управление скоростью может быть достигнуто с помощью управления скоростью с обратной связью, которая регулирует частоту скольжения при постоянном управлении V / f следующим образом.
3.1.8.3 Регулирование скорости с обратной связью путем регулировки частоты скольжения при постоянном
В / f регулированииПри постоянном В / f регулировании крутящий момент асинхронного двигателя можно регулировать путем регулировки частота скольжения fr. Крутящий момент уравнения. (3.59) переписывается в терминах частоты скольжения fr как
(3.62) Tmech = (Vsωs) 22πfrRrRr2 + (2πfrLlr) 2
Поскольку стандартные асинхронные двигатели обычно имеют Rr≫2πfrLlr, если поток в воздушном зазоре постоянен, то крутящий момент пропорционален частоте скольжения fr, поскольку
(3.63) Tmech≅ (Vsωs) 22πRrfr
На рис. 3.45 показана блок-схема системы управления скоростью с обратной связью на основе уравнения. (3.63).
Рисунок 3.45. Регулировка скорости путем регулировки частоты скольжения с постоянным регулированием В, / и .
В этой системе управления скоростью при постоянной работе V / f частота скольжения fr регулируется таким образом, чтобы фактическая скорость n соответствовала командной скорости n *. Поскольку развиваемый крутящий момент асинхронного двигателя можно регулировать с помощью частоты скольжения, если фактическая скорость двигателя меньше его команды, то контроллер увеличивает частоту скольжения для создания большего крутящего момента. С другой стороны, если фактическая скорость выше, чем его команда, то контроллер уменьшает частоту скольжения, чтобы уменьшить развиваемый крутящий момент.В этом случае диапазон изменения частоты скольжения должен быть ограничен в пределах максимальной частоты скольжения, при которой возникает пробойный момент.
Как только требуемая частота скольжения fr * определена таким образом, команда частоты статора может быть определена суммой частоты скольжения и скорости ротора fm как
(3,64) fs * = fm ± fr *
От эта команда частоты статора fs *, команда напряжения, приложенная к двигателю, должна определяться в соответствии с линейной зависимостью В, / f , показанной на рис.3.43. Это опорное напряжение Vs * с частотой статора обычно генерируется с помощью инвертора PWM, который будет описан в главе 7. Инвертор, используемый для этой цели, называется инвертором с регулируемым напряжением и переменной частотой (VVVF).
На рис. 3.46 показано регулирование скорости с обратной связью, показанное на рис. 3.45. На рис. 3.46A показана операция увеличения скорости. Если частота статора увеличивается за счет увеличения частоты скольжения, то развиваемый крутящий момент становится больше, чем крутящий момент нагрузки, и, таким образом, скорость увеличивается.С другой стороны, на рис. 3.46B показана операция по снижению скорости. Если частота статора уменьшается из-за уменьшения частоты скольжения, то развиваемый крутящий момент становится меньше момента нагрузки, и, таким образом, скорость уменьшается.
Рисунок 3.46. Операции в замкнутой системе регулирования скорости. (A) увеличение скорости и (B) уменьшение скорости.
Эта схема управления скоростью для асинхронных двигателей широко используется в приводах общего назначения, таких как вентиляторы, насосы и конвейеры, поскольку она может повысить эффективность системы и обеспечить удовлетворительный пусковой момент и удовлетворительную работу в установившемся режиме.Этот элемент управления может обеспечить регулировку скорости на 1-2%. Однако этой схемы управления недостаточно для достижения высоких динамических характеристик. Следовательно, нам нужен усовершенствованный метод управления, такой как Vector control , который будет описан в главе 5.
Моделирование рабочей скорости на участках двухполосных магистралей на основе данных зондирующих транспортных средств: подход стохастической границы
Большая часть Существующие статистические модели рабочей скорости применимы к отдельным элементам конструкции, особенно к горизонтальным кривым и касательным.Сегментный подход к эксплуатационной скорости применялся редко, за некоторыми исключениями, в основном связанными с оценкой характеристик городских коридоров и коридоров автомагистралей или исследованиями согласованности проектирования с использованием профилей скорости, построенных на основе последовательных элементов конструкции. В этом исследовании представлена новая модель для прогнозирования рабочих скоростей на участках двухполосных автомагистралей. Максимальная рабочая скорость определяется стохастической пограничной функцией среднесуточного трафика и геометрии дороги; асимметричное возмущение объясняет разнообразие поведения водителей и характеристик транспортных средств, что позволяет оценить скорость любого процентиля.Модель была откалибрована с использованием данных о транспортных средствах с незагруженными дорогами. Точность среднесуточного трафика в представлении фактических условий движения была дополнительно подтверждена с использованием одновременных измерений скорости движения. Новая модель призвана помочь практикующим специалистам в оценке согласованности конструкции с макроскопической точки зрения с ранних этапов планирования и проектирования дорог, а также поддержать определение ограничений скорости на новых или существующих объектах инфраструктуры.
1.Введение
На протяжении последних десятилетий предпринимались все более активные усилия по пониманию и прогнозированию рабочих скоростей на дорожных сооружениях, следуя тенденции исследователей и практиков использовать рабочую скорость в качестве инструмента для определения геометрии дороги и обеспечения согласованности конструкции. Подавляющее большинство существующих моделей сосредоточено на чисто геометрическом влиянии на скорость движения, исследуя отношения между геометрическими параметрами и скоростями, практикуемыми в условиях свободного потока в отдельных элементах конструкции, особенно в горизонтальных кривых или касательных.Такие модели широко известны как модели точечной скорости, исчерпывающий обзор которых содержится в Циркуляре исследований транспорта E-C151 [1].
Рабочая скорость на участке дороги, определяемая как непрерывная последовательность элементов конструкции, составляющих участок дороги, гораздо менее изучена, несмотря на то, что оценки скорости на участке дороги, основанные на характеристиках дороги, могут иметь значение для оценки проектирования дороги и операции. Использование моделей прогнозирования скорости сегмента на ранних стадиях проектирования дороги позволяет специалистам-практикам проверять для каждой итерации проектирования, находятся ли различия между выбранной расчетной скоростью и ожидаемой рабочей скоростью в приемлемых пределах.Анализ чувствительности таких различий может пролить свет на переменные, наиболее влияющие на согласованность проекта, тем самым предоставив представление о наиболее эффективных действиях по управлению этим в следующих итерациях процесса проектирования с конечной целью получения удовлетворительного окончательного решения. Эта процедура соответствует предложениям Fitzpatrick et al. [2] относительно использования индексов выравнивания для оценки согласованности дизайна с макроскопической точки зрения. Тем не менее, чтобы улучшить показатели безопасности, Фитцпатрик и др.[2] выступают за то, чтобы такой анализ дополнялся традиционным подходом к профилю скорости, основанным на оценке снижения скорости между последовательными элементами конструкции.
Сегментные модели скорости также могут играть важную роль в определении ограничений скорости на запланированных дорогах или корректировке существующих. Ограничения скорости законодательно устанавливаются в зависимости от функционального класса дороги, но проектировщики и менеджеры дорог могут устанавливать зоны скорости с различными ограничениями, если установленные законом ограничения не соответствуют конкретным дорогам или условиям движения.Наиболее распространенный подход заключается в установке ограничения скорости около 85-го процентиля скорости (V85) в репрезентативных местах предлагаемой зоны [3]. Использование сегментных скоростных моделей позволяет избежать субъективного выбора репрезентативных сайтов за счет рассмотрения агрегированных характеристик всей зоны. Кроме того, модель может использоваться в альтернативных методах определения ограничений скорости, таких как экспертная оценка [4–6], помогая экспертам предлагать адекватные ограничения скорости.
Наконец, специалисты-практики могут использовать оценки скорости на сегментах при оценке и мониторинге существующих дорог, когда данные о скорости в реальном мире недоступны.Оценка времени в пути, затрат и выбросов, выявление угроз безопасности и информация участников дорожного движения являются примерами приложений, которые часто полагаются на знание рабочих скоростей и которые могут побудить практикующих специалистов принять меры, направленные на повышение производительности системы. и эффективность.
Чтобы решить проблему отсутствия исследований эксплуатационной скорости на участках дороги, в этом исследовании представлена новая модель двухполосных автомагистралей. Основная цель — предоставить новый инструмент для определения скорости сегмента, способный прогнозировать любой заданный пользователем процентиль, чтобы помочь практикующим специалистам в проектировании, анализе безопасности и оценке эффективности новых и существующих дорожных инфраструктур, уделяя особое внимание сельским дорогам, где установлено оборудование для контроля скорости редко доступны.Модель скорости сегмента основывается на предыдущем исследовании авторов по моделированию точечной скорости, сохраняя формулировку модели границы рабочей скорости (OSFM), которая позволяет оценивать процентильную скорость [7, 8]. В новой модели геометрические характеристики и характеристики движения представлены граничной функцией, в то время как член асимметричного возмущения учитывает неколичественные факторы, связанные с поведением водителей и технологией транспортных средств. Скорости сегментов оценивались на основе данных зондового транспортного средства, геометрические характеристики оценивались как на основе данных зондового транспортного средства, так и на основе измерений на месте, а влияние дорожного движения оценивалось через среднегодовое дневное движение.
Остальная часть документа имеет следующую структуру. Во-первых, дается справочная информация о наиболее важных достижениях, содержащихся в литературе по изучению сегментных скоростей. В описании данных подробно описывается сбор данных о скорости и геометрии дороги с использованием транспортных средств, а также дополнительные требования к данным с точки зрения геометрических характеристик и характеристик движения. Затем в описании модели представлена формулировка OSFM и методы, использованные для получения новой модели скорости сегмента из предыдущей модели скорости точки, представленной авторами [8].Оценка модели представляет модель скорости сегмента для двухполосных автомагистралей, откалиброванную для португальских условий. В документе проводится сравнение между OSFM и методом профиля скорости, а также проверка модели с использованием одновременных данных о скорости и движении на участках дороги за пределами калибровочной выборки. Основные выводы этого исследования представлены в заключительном разделе.
2. Предпосылки
Набор сегментных скоростных моделей, представленных в литературе, намного меньше, чем полный набор точечных скоростных моделей, разработанных на сегодняшний день [1].Основная причина отсутствия разработок исследований скорости сегментов, вероятно, связана с потребностью в большем количестве времени и значительно больших ресурсов для выполнения сбора данных.
Традиционными методами оценки скорости сегментов являются метод стационарного наблюдателя и метод движущегося наблюдателя [9]. В методе стационарного наблюдателя на каждом конце участка съемки размещается наблюдатель, регистрирующий время проезда каждого транспортного средства и номерной знак, чтобы рассчитать время, затраченное на прохождение участка.В методе движущегося наблюдателя наблюдатель в тестовом автомобиле преследует случайно выбранные транспортные средства через сегмент, записывая соответствующее время в пути. В основе концепции скорости в обоих методах лежит средняя пространственная скорость, представленная гармоническим средним значением скоростей по длине проезжей части, которое может быть получено из среднего времени в пути наблюдаемых транспортных средств.
На автострадах и городских дорогах исследователи воспользовались преимуществами доступных технологических устройств, чтобы сократить вмешательство человека в сбор данных.Дион и Ракха [10], Ли и др. [11], а также Там и Лам [12] применили принцип стационарного наблюдателя, используя данные автоматической идентификации транспортных средств (AVI) из пунктов сбора платы за проезд для расчета времени и скорости в пути. Дженелиус и Кутсопулос [13] и Ван и др. [14] применили принцип движущегося наблюдателя для измерения времени в пути и скорости в городских сетях с использованием данных о плавающих автомобилях (FCD) от систем датчиков, установленных в таксопарках. Ракха и Чжан [15], Соригуэра и Робусте [16], а также Мартинес-Диас и Перес [17] вывели средние космические скорости и соответствующие доверительные интервалы из средних временных скоростей на автострадах, используя преимущества существующих петлевых детекторов.Хотя в этих исследованиях преимущественно использовался статистический подход, такие авторы, как Park et al. [18], ван Линт и др. [19], и Tang et al. [20] применили нейронные сети для прогнозирования скорости и времени в пути с использованием данных со стационарных устройств, установленных в городских коридорах автомагистралей, подчеркнув преимущества этих методов для обеспечения краткосрочных прогнозов в периоды заторов.
Что касается двухполосных автомагистралей, только несколько руководств по проектированию предлагают методы определения рабочих скоростей на всем протяжении проезжей части.В Великобритании как эксплуатационная, так и расчетная скорости устанавливаются на основе геометрических переменных, в частности, изгиба и средней видимости, наблюдаемых на участке длиной не менее 2 км [21]. В Германии рабочая скорость определяется скоростью изменения кривизны и шириной дорожного покрытия [22]. Другие официальные руководящие принципы предлагают различные расчетные скорости в соответствии с функциональной классификацией дороги и предоставляют методы для обеспечения согласованности дизайна за счет ограничения разницы скоростей между последовательными элементами дизайна.Это относится к справочному руководству США «Политика геометрического проектирования шоссе и улиц » [23] и руководящим принципам Португалии [24].
Руководство по пропускной способности автомагистралей (HCM) [25], которое рассматривается практиками во всем мире как стандартное руководство по процедурам пропускной способности и уровня обслуживания, также использует сегментный подход для оценки скорости свободного потока (FFS). . Во-первых, должна быть принята базовая скорость свободного потока (BFFS), основанная на расчетной скорости, объявленном ограничении скорости или скоростях, наблюдаемых на аналогичных объектах.Затем FFS оценивается путем уменьшения BFFS для эффектов ширины поперечного сечения и плотности точек доступа. HCM обосновывает, что никаких дополнительных указаний по оценке BFFS не предоставляется из-за разнообразия местных условий, которые играют важную роль в выборе скорости водителями. Однако можно сделать вывод, что BFFS — это скорость, наблюдаемая на дорогах с аналогичной функциональной классификацией и стандартами проектирования, без точек доступа и шириной полосы движения, равной или превышающей 3.6 м и 1,8 м соответственно, поскольку предлагаемые поправки к BFFS применимы только для более высокой плотности точек доступа и меньшей ширины поперечного сечения. HCM предлагает использовать этот метод только тогда, когда измерение скорости невозможно, например, на этапах планирования и проектирования новой дороги, но методы оценки скорости для других объектов все еще требуются, если BFFS устанавливается путем сравнения с аналогичными дорогами. .
В целом, академическое сообщество разработало несколько методов оценки скорости движения на автострадах и малых городских дорогах с использованием данных существующего оборудования для мониторинга для упрощения сбора данных.В свою очередь, справочные руководства содержат некоторые рекомендации по определению проектных и / или рабочих скоростей на дорогах с различными функциональными классификациями, в том числе на двухполосных шоссе, но относительно скромно объясняют лежащие в основе методы и допущения. Таким образом, модель скорости сегмента, разработанная в этом исследовании, призвана внести значительный вклад в эту отрасль знаний.
3. Описание данных
Новая модель скорости сегмента была откалибрована с использованием данных скорости, трафика и геометрических характеристик девяти участков дороги, расположенных на трех двухполосных автомагистралях в Португалии: N 14, N 101 и N 206.На этих дорогах расчетная скорость составляет от 40 до 60 км / ч, развязки обычно находятся на неровном уровне, и разрешен прямой доступ к окраинным участкам. Кроме того, занятость придорожных участков имеет большое влияние на плотность перекрестков и боковой просвет. Радиус кривой и ширина полосы движения иногда меньше минимальных значений, предложенных в руководстве [24]. Дороги для тематического исследования были выбраны таким образом, чтобы отразить разнообразие характеристик национальных дорог — категории, представляющей подавляющее большинство сети автомобильных дорог страны.Дороги более высоких функциональных классификаций, то есть основные и дополнительные маршруты, не были включены в настоящее исследование из-за проблем с доступностью данных.
Длина каждого калибровочного сегмента составляет от 2 до 4 км. Общая протяженность анализируемой проезжей части составляет 23,5 км. Сегменты расположены за пределами городских районов, пересекая либо полностью сельскую местность, либо зоны с разбросанными зданиями (Рисунок 1). Тротуар в хорошем состоянии, разметка хорошо видна. Топографические особенности соответствуют классификации ровной или холмистой местности [25].Трафик характеризуется незагруженным потоком, за исключением возможного возникновения единичных инцидентов. Сегменты, содержащие сигнальные перекрестки или перекрестки с круговым движением, были исключены из этого анализа, чтобы гарантировать, что все транспортные средства, пересекающие калибровочные сегменты, имеют полосу отчуждения.
Данные о скорости были получены на основе данных о транспортных средствах, предоставленных компанией, специализирующейся на цифровых картах и приложениях. Эта компания использует многочисленные устройства для сбора информации о зондировании, установленные на борту профессиональных и частных транспортных средств, которые в режиме реального времени передают информацию в систему информации о дорожном движении, доступную медиа-партнерам и приложениям GPS.Высокоскоростная система GPS (> 1 Гц) обеспечивает точное представление траектории каждого зондирующего транспортного средства, позволяя идентифицировать транспортные средства, которые пересекли каждый калибровочный сегмент. Средняя пространственная скорость каждого транспортного средства, состоящая из зависимой переменной модели, была рассчитана на основе времени в пути, заданного разницей между отметками времени GPS, соответствующими началу и концу сегмента. Чтобы гарантировать однородный образец для моделирования, было рассмотрено 75 транспортных средств, наблюдаемых в каждом сегменте в обоих направлениях, что соответствует количеству транспортных средств зонда в калибровочном сегменте с меньшим количеством зарегистрированных наблюдений.Всего для оценки модели было использовано 675 наблюдений.
Независимые переменные, включенные в модель скорости сегмента, основаны как на геометрических характеристиках, так и на характеристиках трафика. Геометрический дизайн характеризуется горизонтальным выравниванием, шириной поперечного сечения и плотностью пересечений, что согласуется с предыдущими исследованиями влияния скорости, создаваемого переменными величинами, измеренными по длине дороги [8, 21, 22, 25, 26 ]. Горизонтальное выравнивание калибровочных сегментов было воспроизведено в программном обеспечении САПР с использованием данных датчиков, собранных аппаратурой лаборатории анализа движения инженерного факультета Университета Порту.Подобное воспроизведение вертикальной центровки было невозможно из-за недостоверных данных альтиметрии. Руководство по пропускной способности автомагистрали [25] предполагает, что соответствующее снижение скорости может происходить на участках с уклоном более 3% на протяжении более 1 км. Однако такая ситуация не возникает в сегментах калибровки, хотя локально могут присутствовать более крутые уклоны. Таким образом, не ожидается, что отсутствие переменных, характеризующих вертикальное выравнивание, будет значимым упущением в модели.
В отличие от моделей точечной скорости, обычно относящихся к безнапорным транспортным средствам, модели скорости сегментов должны учитывать эффекты движения.Во-первых, оценка эксплуатационных характеристик дорожной инфраструктуры с использованием последних моделей будет более реалистичной, если учитывать условия движения. Во-вторых, независимо от метода, используемого для сбора данных о скорости сегмента, трудно гарантировать, что образцы транспортных средств пересекут весь сегмент в условиях свободного потока; следовательно, на наблюдения за скоростью могло повлиять присутствие на дороге других транспортных средств.
В частности, геометрическими характеристиками и характеристиками движения, включенными в модель, были изгиб (), ширина асфальтированного покрытия в одном направлении (PW) и его стандартное отклонение (SDPW), дополнительный боковой зазор (ELC), плотность перекрестков (DI). ) и среднегодовой дневной трафик (AADT).соответствует сумме углов отклонения горизонтальной центровки на километр. PW представляет собой среднее значение комбинированной ширины полосы движения и правого плеча. Среднее значение было рассчитано на основе измерений, проведенных в ряде мест в пределах сегмента. Расстояние между точками измерения составляет примерно 500 м. PW экспериментирует с частыми вариациями в зависимости от маргинального землепользования и топографии национальных дорог Португалии, особенно в отношении ширины обочины. Поэтому SDPW был включен в модель, чтобы учесть влияние такого разнообразия на участке дороги.ELC представляет собой расстояние между внешней границей правого плеча и любым неподвижным объектом на обочине дороги. Эта переменная определялась средним значением, соответствующим тем же участкам, где измеряли PW. DI соответствует количеству перекрестков или развязок на километр. Суммарный суточный показатель трафика, AADT, был рассмотрен, поскольку время суток, в которое были зарегистрированы транспортные средства-зонды, неизвестно. Затем AADT использовался в качестве прокси для текущих условий движения, с которыми сталкивались тестовые автомобили.Данные о дорожном движении были либо предоставлены предыдущим исследованием моделирования аварий, проведенным на тех же дорогах Коста [27], либо оценены на основе измерений на месте с использованием автоматических счетчиков трафика (VIACOUNT II). Использование суточных показателей движения в качестве предикторов скорости не является чем-то новым в литературе, поскольку они присутствуют в таких исследованиях, как Lamm and Choueiri [28], Jessen et al. [29], а также Schurr et al. [30].
Поскольку все переменные охватывают пространственное измерение, отражающее либо значение на единицу расстояния, либо среднее значение, представляющее весь сегмент, длина сегмента не была включена в анализ.Минимальная длина в 2 км, необходимая для выбора калибровочного сегмента, обеспечивает разумное расстояние для оценки средней космической скорости, а также необходимое отличие от исследований точечной скорости. В таблице 1 представлено общее описание данных, использованных для оценки модели скорости сегмента.
| ||||||||||||||||||||||||||||||||||||||
4. Описание модели
OSFM, использованный в этом исследовании, был представлен в предыдущих исследованиях скорости пятна авторами [7, 8] для устранения некоторых ограничений широко распространенных моделей, ориентированных на процентили [1].Традиционно калибровка скоростных моделей выполняется путем применения линейной регрессии между факторами скорости и конкретной процентильной скоростью, полученной путем агрегирования значений, собранных на месте. Помимо очевидного недостатка поддержки оценки только одного процентиля скорости, агрегирование данных о скорости в традиционных моделях вызывает потерю информации, которая снижает общую изменчивость и характер изменчивости, связанной с функцией регрессии. Следовательно, оценочные эффекты независимых переменных могут быть смещенными [31].Следовательно, моделирование всего распределения скоростей может способствовать решению этой проблемы.
В литературе есть только две другие модели, поддерживающие распределение скорости, которое можно использовать для оценки любой процентильной скорости пятна. Медина и Тарко [32] использовали обычный метод наименьших квадратов для оценки индивидуализированного уравнения регрессии для любого предполагаемого процентиля. Полученные модели представляют собой линейные комбинации факторов, связанных со средним значением и стандартным отклонением распределения скорости.Хьюсон [33] обобщил этот подход с помощью квантильной регрессии.
OSFM [7, 8], хотя и использует полное распределение скоростей, следует совершенно иному подходу, основанному на стохастических моделях границы из эконометрического анализа [34, 35]. OSFM образован детерминированной функцией границы скорости и двумя членами возмущения. Граница скорости задается экспоненциальной функцией набора независимых переменных, характеризующих наиболее важные дорожные условия, которые оцениваются методом максимального правдоподобия с использованием общего количества наблюдений за скоростью.Экспоненциальная форма учитывает взаимодействие между порядком величины скоростей и воздействиями независимых переменных. Значения на границе скорости представляют собой верхний предел рабочей скорости, оцененный для каждой комбинации независимых переменных; следовательно, граница скорости называется максимальной рабочей скоростью (макс). Другими словами, max отражает динамику скорости самых быстрых водителей и варьируется в зависимости от дорожных условий. max результаты статистической обработки рабочих скоростей, собранные при хорошей погоде и условиях дорожного покрытия; таким образом, его не следует путать с концепциями скорости, представляющими критические для безопасности ситуации для динамического равновесия транспортного средства.
Сегментная модель скорости основана на последней модели точечной скорости авторов для горизонтальных кривых и касательных национальных дорог Португалии, представленной в Lobo et al. [8]. В этой модели точечной скорости max состоит из переменных, характеризующих местные условия, а именно, геометрических параметров и параметров видимости на месте, а также переменных, отражающих недавний опыт вождения, то есть геометрические параметры и параметры помех на обочине дороги, измеренные на предыдущем участке. Общая формулировка, представленная Lobo et al.[8], который поддерживает прогноз максимума для отдельного элемента дизайна, задается как
, где — максимальная рабочая скорость для данного элемента дизайна, это характеристика на месте, характеристика сегмента и коэффициенты регрессии.
Новая модель скорости сегмента разработана на основе предыдущей модели точечной скорости не только потому, что обе модели используют формулировку OSFM, но также потому, что совокупное влияние характеристик сегмента на рабочую скорость считается идентичным в обеих моделях, за исключением масштаб.Другими словами, сегментные эффекты, включенные в модель точечной скорости, переводятся в модель скорости сегмента посредством калибровки единственного коэффициента, влияющего на все эти переменные. Переменная, используемая в качестве предиктора в модели скорости сегмента, объединяет характеристики сегмента, рассматриваемые в модели скорости точки, например. Кроме того, новая модель учитывает специфические эффекты, влияющие на скорость сегментов, которые отсутствовали в модели точечной скорости. Эти эффекты связаны с наличием движения и разбросом ширины поперечного сечения, как ранее обсуждалось в этой статье.Переменные, характеризующие отдельные элементы дизайна, т. Е. Измеренные локально, а не по длине проезжей части, исключаются из модели скорости сегмента. Уравнение (2) представляет собой общую формулировку модели для оценки максимума на заданном участке дороги.
где — максимальная рабочая скорость на данном участке дороги, SC — переменная, представляющая агрегированные характеристики сегмента из модели точечной скорости, — характеристика сегмента, связанная с движением или дисперсией переменных поперечного сечения, — константа регрессии, коэффициент регрессии или масштабный коэффициент переменной SC, и являются коэффициентами регрессии характеристик сегмента.
OSFM учитывает два параметра возмущения: член шума и член асимметричного возмущения. Первый термин поддерживает стохастический характер границы скорости, представляя случайные ошибки, связанные со спецификацией модели и сбором данных. Это часто рассматривается в регрессионных моделях и предполагает нормальное распределение. Последний термин представляет собой асимметрично распределенное возмущение, учитывающее отклонения от max, которые приписываются неколичественным факторам, то есть факторам, отличным от тех, которые представлены детерминированной границей.Затем асимметричное возмущение подходит для представления разнообразия скоростей транспортного средства, наблюдаемого на одном и том же элементе дороги или участке, которое, в свою очередь, зависит от индивидуальных реакций каждой пары водитель-транспортное средство на одинаковые дорожные условия. Другими словами, асимметричное возмущение в OSFM объясняет снижение скорости от максимальной, вызванное разнообразием в поведении водителей и технологиями транспортного средства. Следовательно, кумулятивная функция распределения этого возмущения позволяет оценить любую желаемую процентильную скорость.Подобно предыдущим исследованиям [7, 8], асимметричное возмущение принимает экспоненциальное распределение, например, где — параметр скорости экспоненциальной функции. Кумулятивная функция асимметричного возмущения равна, а обратное преобразование равно. Следовательно, th процентиль скорости на данном участке дороги можно оценить с помощью
, где — это процентиль скорости на данном участке дороги, а значение процентиля ().
Согласно Грину [36], метод максимального правдоподобия более эффективен при обработке асимметричных возмущений, чем метод наименьших квадратов.Таким образом, OSFM оценивается посредством максимизации логарифмической функции правдоподобия, показанной в
, где — функция правдоподобия, — общее количество наблюдений, — это стандартное отклонение распределения шумового члена, — шумовой член для транспортного средства в сегменте. , является асимметричным возмущением для транспортного средства в сегменте, и является стандартной функцией нормального распределения.
5. Оценка модели
Калибровка модели скорости сегмента для национальных дорог в Португалии была произведена посредством стохастической пограничной регрессии между средними пространственными скоростями всех образцов транспортных средств и геометрией дороги и движением.Регрессия основана на
Уравнение (5) представляет линеаризованную форму (3) и детализирует формулировку модели с ранее описанными переменными. Показатели факторов, составляющих SC, взяты из модели точечной скорости для национальных дорог Португалии, представленной Lobo et al. [8], перекалиброванный в модели скорости сегмента с помощью масштабного коэффициента α 1 . Чтобы соответствовать формулировке OSFM, предикторы скорости преобразуются в логарифмические значения, что означает, что модель не применима, когда ELC,, DI или SWPD имеют значение NULL.
Модель оценивалась методом максимального правдоподобия с использованием эконометрической программы Limdep [37]. Результаты показаны в таблице 2. Эти результаты переводятся в окончательную спецификацию модели для оценки максимальной и -й процентили скорости на участках национальных дорог Португалии, представленных с ELC,, DI и SWPD> 0.
| ||||||||||||||||||||||||
| Примечание .Логарифмическое правдоподобие = 143,617; количество наблюдений = 675; = 0,168; = 0,124; = 5,947. на уровне 1%. | ||||||||||||||||||||||||
Коэффициенты отдельных переменных можно интерпретировать как эластичности из-за функциональной формы модели. Эластичности PW, ELC и DI задаются исходной эластичностью, оцененной в модели скорости пятна, умноженной на масштабный коэффициент. Результаты показывают, что геометрические переменные, особенно связанные с шириной поперечного сечения, представляют собой наиболее важные эффекты, влияющие на рабочие скорости.Увеличение PW при сохранении постоянных остальных переменных оказывает положительное влияние на скорость, что проявляется в эластичности 0,352. Влияние увеличения ELC также положительно, хотя и с меньшей эластичностью 0,036. Кроме того, отрицательный коэффициент SDPW отражает то, что изменение PW на участке дороги оказывает негативное влияние на скорость. Многие португальские национальные дороги характеризуются непостоянной шириной асфальтированного покрытия, что в основном объясняется частым изменением ширины обочины в зависимости от предельного землепользования, что вносит неопределенность в ожидания водителей относительно дороги впереди, заставляя их выбирать более осторожную скорость.Влияние скорости, вызванное увеличением плотности пересечений и изгибов, отрицательное, с эластичностью -0,161 и -0,120, соответственно. Результаты также показывают, что, как и ожидалось, увеличение трафика приводит к снижению скорости. В частности, эластичность, связанная с AADT, означает, что увеличение трафика на 10% при незагруженном потоке приведет к снижению средней космической скорости на 0,6%.
6. Проверка модели
Способность модели поддерживать точные прогнозы скорости была оценена с использованием двух различных процедур.Сначала предсказания скорости, возвращаемые моделью для каждого из калибровочных сегментов, сравнивались с результатами метода профиля скорости. Затем модель была проверена с использованием одновременных данных о скорости и дорожном движении, собранных на двух дополнительных участках дороги.
6.1. Сравнение с методом профиля скорости
Насколько известно авторам, не существует другой модели скорости сегмента для двухполосных сельских автомагистралей, которая была бы разработана вне рамок руководств по проектированию дорог и пропускной способности.В Португалии официальные инструкции предлагают метод профиля скорости для оценки согласованности конструкции на всем протяжении проезжей части с точки зрения безопасности. Скорость вычисляется поэлементно с учетом динамического равновесия транспортного средства, чтобы проверить, лежат ли различия между последовательными элементами конструкции в нормативных пределах [24]. На основе этого подхода подход профиля скорости использовался для оценки скоростей сегментов в девяти калибровочных сегментах, от CS1 до CS9, и сравнения результатов с оценками OSFM.Чтобы соответствовать оперативному характеру этого анализа, уравнения динамического равновесия были заменены традиционной моделью V85, ранее разработанной для прогнозирования точечной скорости на поворотах и касательных двухполосных дорог Португалии [26]. Затем на основе расчетного V85 было получено приблизительное время пробега в каждом элементе дизайна; модель не учитывает изменения скорости в элементах дизайна. Наконец, скорости сегментов были получены из суммы времени прохождения всех элементов конструкции, составляющих каждый сегмент.На рисунке 2 представлены наблюдаемые скорости сегмента 85-го процентиля () и соответствующие оценки с использованием OSFM () и метода профиля скорости ().
В семи из девяти случаев разница между оценками OSFM и наблюдаемыми значениями меньше 4 км / ч, что превосходит метод профиля скорости. Хотя последний метод дает более точные прогнозы в оставшихся двух случаях, отклонения от наблюдаемых значений в тестовых примерах гораздо более непоследовательны, что может быть связано с игнорированием трафика и эффектами ускорения / замедления.
Среднее абсолютное отклонение (MAD) и среднеквадратическая ошибка (MSE) были рассчитаны для обоих методов с использованием набора из девяти тестовых примеров. Оценки OSFM привели к MAD 3,4 и MSE 32,1. Метод профиля скорости дал MAD 8,4 и MSE 128,3. Эти результаты показывают гораздо лучшее соответствие OSFM по сравнению с подходом профиля скорости в отношении оценки V85. Кроме того, OSFM использовался для оценки процентилей скоростей между 1-м и 99-м для всех калибровочных сегментов.Для этой выборки были получены MAD 4,5 и MSE 33,1, что означает, что степень согласия модели достаточно стабильна для разных процентилей.
6.2. Проверка с одновременным использованием данных о скорости и трафике
Модель скорости сегмента была проверена на двух дополнительных участках дороги, VS1 и VS2, чтобы проверить, не влияет ли использование агрегированного показателя трафика, AADT, на способность модели справляться с различными дорожными ситуациями. . В этом смысле процентильные скорости, полученные на основе модели и измерений, проведенных на двух этапах проверки, сравнивались друг с другом для эквивалентных транспортных потоков.Сравнение проводилось для условий высокого и низкого объема, которые были связаны с пиковыми и внепиковыми дневными периодами, соответственно. Ночной непиковый период не анализировался, поскольку предполагается, что транспортный поток достаточно низкий, чтобы обеспечить условия свободного движения почти для всех транспортных средств.
И VS1, и VS2 имеют длину 3 км и относятся к двум португальским национальным дорогам, не включенным в модельную выборку, соответственно, N 108 и N 222. Первая дорога намного старше второй, что означает более низкие стандарты с точки зрения горизонтальная кривизна, ширина поперечного сечения и придорожные помехи.Трафик в VS1 ниже, чем в VS2, потому что первый расположен дальше от крупного городского центра. Таблица 3 содержит характеристики, собранные для обоих сегментов проверки.
| |||||||||||||||||||||
Процедура началась с выполнения 24-часовых измерений трафика для характеристики условий как большого, так и низкого объема трафика в каждом сегменте рабочего дня.Автоматический счетчик трафика (VIACOUNT II) был размещен примерно в середине каждого сегмента. Наибольший получасовой объем трафика наблюдался во время дневного пика в обоих сегментах, особенно между 17:45 и 18:15 в VS1 и между 18:00 и 18:30 в VS2. Самый низкий получасовой объем в дневное время наблюдался между утренним и дневным пиками трафика, с 16:45 до 17:15 в VS1 и с 16:15 до 16:45 в VS2. Получасовая основа была выбрана для учета использования ресурсов на следующем этапе, проводимого в эквивалентные периоды времени другого рабочего дня.На этом этапе наблюдатель, записывающий номерные знаки транспортных средств и время проезда, и автоматический счетчик трафика для одновременных и надежных измерений трафика были размещены на обоих концах каждого сегмента проверки. Распознавание номерных знаков позволило получить процентильные скорости сегментов из наблюдений на месте () для условий высокой и низкой интенсивности движения. В свою очередь, одновременные измерения трафика позволили получить оценки процентилей скорости сегментов из модели (). Поскольку в модели в качестве объясняющей переменной используется AADT, получасовой трафик, характеризующий периоды высокого и низкого объема, был преобразован в дневную основу путем умножения на 48.Это преобразование привело к оценкам, соответствующим гипотетическим ситуациям постоянного транспортного потока в течение 24 часов. Хотя такие ситуации нереалистичны, эта процедура гарантирует это и сообщает об аналогичных потоках трафика.
Сравнение и было выполнено для 15-го, 50-го и 85-го процентилей (V15, V50 и V85), которые наиболее часто используются в приложениях для моделирования скорости. Чтобы лучше направлять это сравнение, компонент случайной ошибки был применен к оценкам скорости в форме интервала, определенного примерно стандартным отклонением распределения шумового члена, так что пределы интервала имеют вид.Результаты представлены на рисунках 3 и 4, соответствующих условиям высокого и низкого объема трафика соответственно.
Для условий большого объема движения наблюдаемые процентильные скорости лежат в интервале, определяемом стандартным отклонением параметра шума в четырех из шести случаев, при этом оценки V85 находятся на 1 км / ч выше и На 2 км / ч ниже интервала для VS1 и VS2 соответственно. Для небольшого объема трафика наблюдаемые значения также содержатся в интервале в четырех из шести случаев.Наблюдаемые V15 и V85 в VS1 превышают верхнюю границу интервала на 4 км / ч и 2 км / ч соответственно.
Эти результаты могут означать небольшую недооценку процентиля скоростей сегмента моделью национальных дорог с более низкими проектными стандартами, при этом половина наблюдаемых значений, представленных для VS1, расположена над соответствующими интервалами. Модель работает лучше в случае VS2, представляющего национальную дорогу с более высокой расчетной скоростью, при этом только одна из наблюдаемых процентных скоростей падает ниже интервала с небольшим запасом.Модель скорости сегмента также дает более точные прогнозы для средних и малых процентилей.
Однако, с глобальной точки зрения, наблюдаемые процентильные скорости содержатся в интервале около оценочных значений в восьми из двенадцати случаев. В остальных четырех случаях отклонения скорости от соответствующих интервалов составляют не более 4 км / ч. Следовательно, выбранные предикторы скорости, включая AADT, похоже, не влияют на достоверность модели скорости сегмента, которая показала способность поддерживать надежные оценки скорости в различных геометрических условиях и условиях движения.
7. Выводы
Скорость — один из наиболее важных факторов, влияющих на удобство и эффективность дорожной инфраструктуры. Восприятие водителями рабочих скоростей различных маршрутов и, следовательно, времени в пути и затрат сильно влияет на их выбор маршрута. В свою очередь, проектировщики и менеджеры дорог используют рабочую скорость для оценки и мониторинга производительности инфраструктур с точки зрения безопасности, транспортного потока и экологической эффективности.
Несмотря на заметный вклад, представленный многочисленными моделями точечной скорости, существующими в литературе, оценка характеристик дороги может быть значительно улучшена путем разработки методов сегментной скорости.Оценка рабочих скоростей по длине проезжей части обычно связана с измерением соответствующего времени в пути, что может потребовать значительных затрат времени и ресурсов, особенно если не используется автоматический сбор данных. На практике такие трудности препятствовали разработке новых инструментов прогнозирования скорости сегмента; большинство исследований в этой области ограничивалось шоссе и городскими связями с использованием данных, собранных с помощью оборудования для мониторинга, принадлежащего дорожным властям и концессионерам [17].
Это исследование предоставляет единственную модель рабочей скорости, применимую к сегментам двухполосных автомагистралей, которая была разработана на сегодняшний день вне рамок официальных руководств, с основным преимуществом поддержки любого заданного пользователем процентильного прогнозирования скорости. Модель может быть особенно полезна при проектировании дорог и приложениях для обеспечения безопасности, таких как оценка согласованности конструкции на ранней стадии проектирования и определение зон скорости. Кроме того, он может предоставлять прогнозы скорости для помощи в долгосрочных действиях по управлению сетью на дорогах без постоянного оборудования для мониторинга трафика, что очень часто встречается на двухполосных сельских шоссе.
Модель развивает предыдущие исследования авторов по моделированию точечной скорости, сохраняя формулировку OSFM, представленную в Lobo et al. [7, 8]. В этом смысле геометрия дороги и характеристики движения используются для оценки детерминированной границы скорости, представляющей максимальную рабочую скорость для каждой комбинации независимых переменных. Асимметричное возмущение учитывает неколичественные факторы, связанные с поведением водителей и технологией транспортного средства, при этом оценка процентилей скорости производится с помощью кумулятивной функции распределения этого возмущения.
Модель скорости сегмента была откалибрована с использованием полного распределения скорости из базы данных зондирующих транспортных средств, наблюдаемых на девяти сегментах национальных дорог Португалии. Поскольку одновременные данные о скорости и трафике не были доступны для сегментов калибровки, для представления условий движения использовался AADT. Результаты оценки модели подтверждают преимущественное влияние геометрических характеристик на скорость, практикуемую в условиях свободного движения; влияние трафика намного меньше и предсказуемо отрицательно.
Сравнение OSFM с методом профиля скорости дало положительные результаты. Кроме того, он был проверен с использованием распознавания номерных знаков на двух участках дороги за пределами калибровочной выборки, каждый из которых имел дифференцированные геометрические характеристики и характеристики движения. Эта процедура позволила получить одновременные данные о скорости и трафике, которые использовались для оценки процентилей скорости как на основе измерений на месте, так и оценок модели. Модель оказалась надежной в своих прогнозах, при этом наблюдаемые значения скорости лежат в пределах или достаточно близко к интервалу вокруг расчетных значений, определяемых стандартным отклонением распределения шумового члена.Таким образом, это исследование подтверждает адекватность использования транспортных средств для сбора данных о скорости и геометрии дороги для приложений моделирования скорости.
Следует отметить, что модель была откалибрована для национальных дорог Португалии без перегруженности. Следовательно, это не действует для перегруженного транспортного потока. Кроме того, следует тщательно рассмотреть его применение в другом региональном контексте, особенно в неевропейских странах, где геометрические стандарты могут значительно различаться. Однако формулировка OSFM достаточно гибкая, чтобы ее можно было использовать в других регионах с другими дорожными условиями.Отсутствие инструментов для прогнозирования скорости сегмента на двухполосных автомагистралях еще раз подчеркивает вклад настоящего исследования в приложения для обеспечения характеристик дорожного движения и безопасности, в частности в контроль согласованности конструкции на ранних этапах планирования, а также в определение ограничений скорости. оценка времени в пути и рекомендации эффективных маршрутов.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации этой статьи.
Благодарности
Авторы хотели бы поблагодарить Португальский фонд науки и технологий за финансирование этого исследования через доктора философии. Студенческая стипендия SFRH / BD / 71322/2010 и InfoPortugal, S.A., за предоставление данных о транспортном средстве.
«Анализ несоответствий, связанных с расчетной скоростью, рабочей скоростью», Никифорос Стаматиадис и Хуафенг Гонг
Аннотация
Целью этого исследования было изучить взаимосвязь между проектными скоростями, рабочими скоростями и ограничениями скорости, а также решить проблемы безопасности и эксплуатации, связанные с наличием несоответствий между этими показателями скорости.Участки проезжей части были выбраны по всему Кентукки на основе соотношения между расчетной скоростью и объявленным ограничением скорости (большим или меньшим) и количеством полос движения (2 или 4). На этих участках были собраны данные о скорости и геометрии проезжей части, что позволило разработать соответствующие модели. Общий вывод для двухполосных автомагистралей состоит в том, что рабочая скорость отличается от расчетной, что указывает на отсутствие согласия между ними. Для 4-полосных автострад достигнуто согласие между эксплуатационной и расчетной скоростями, что свидетельствует об отсутствии каких-либо различий.Взаимосвязь между рабочей скоростью и указанным ограничением скорости показала, что для всех дорог эти два показателя скорости были разными, а указанное ограничение скорости было ниже 85-й рабочей скорости. Анализ безопасности в целом показал, что несоответствие различных показателей скорости не повлекло за собой значительных последствий для безопасности. Предлагается набор рекомендуемых руководящих принципов, направленных на устранение потенциальных несоответствий между этими метриками скорости с упором на выбор расчетной скорости на основе желаемых рабочих скоростей, чтобы избежать возможных несоответствий, которые могут привести к ошибкам драйвера.
Номер отчета
КТС-06-12 / SPR286-05-1F
Идентификатор цифрового объекта
http://dx.doi.org/10.13023/KTC.RR.2006.12
Ссылка из репозитория
Стаматиадис, Никифорос и Гонг, Хуафэн, «Анализ несоответствий, связанных с расчетной скоростью, рабочей скоростью и ограничениями скорости» (2004). Отчет об исследовании транспортного центра Кентукки . 112.
https://uknowledge.uky.edu/ktc_researchreports/112
скорость работы в предложении
Эти примеры взяты из корпусов и из источников в Интернете.Любые мнения в примерах не отражают мнение редакторов Cambridge Dictionary, Cambridge University Press или его лицензиаров.
Нижняя рабочая скорость снижает эксплуатационные расходы.
Эксплуатационные расходы очень сильно зависят от , работающего со скоростью , , , но стоимость строительства не так сильно зависит от , работающего , , скорости .
С другой стороны, размер корабля с низкой скоростью , работающей, , , должен увеличиваться для перевозки данного количества груза, что увеличивает стоимость постройки корабля.
Это дает только половину рабочих скорости широкополосного доступа, но люди платят почти столько же.
Нормальный рабочий обороты были 28600 об / мин.
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Текущий работает скорость на линии составляет 100 км / час.
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Для хорошего разрешения спектров необходима высокая рабочая скорость .
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Для этого требуются приводы всех размеров, мощности и рабочих скорости .
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Он имеет проектную , рабочую, , , скорость , 300 км / ч.
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Нормальная рабочая обороты для двигателей были около 79 об / мин.
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Это определяет максимальную рабочую скорость синхронного контура.
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Он спроектирован так, чтобы иметь две версии: одна с максимальной рабочей скоростью 220 км / ч; другой с топом рабочий скорость 160 км / ч.
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Мы рассматриваем результаты первого года пилотных схем, чтобы покрыть расходы на , эксплуатирующие скорости и камеры красного света систематически.
Выявлена нормальная рабочая скорость , в результате чего каждый член класса сбалансирован соответствующим образом.
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Появляются новые технологии для небольших устройств для экономии затрат, низкого энергопотребления и увеличения рабочих скорости .
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Экспресс-поезда имеют в среднем рабочих скорости от 100 км / ч до 120 км / ч миль / ч.
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Это минимизировало период, в течение которого двигатель работал ниже своей эффективной , работая на скорости .
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.На таких компоновках силовой установки трансмиссия соответствует оптимальной для силовой установки и гребного винта при работе скорости .
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Различные модели предлагают выбор количества игл, рабочих скорости и уровней мощности.
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Планируется, что он будет длинным, с шестью станциями и скоростью 110 км / ч , работающей , , скоростью .
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Нормальная рабочая скорость около 101.2 об / мин, что дает расход топлива 28 тонн в сутки.
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Статический временной анализ часто используется для определения максимально безопасной рабочей скорости .
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Однако точное определение , работающего, , , , скорости, , открыто для обсуждения.
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Снижение скорости рабочей до 12 узлов, снижение расхода топлива до 50 тонн в сутки.
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Это позволяет избежать прерывания передачи, пока генератор работает до , , , частота вращения .
ИзВикипедия
Этот пример взят из Википедии и может быть повторно использован по лицензии CC BY-SA.Эти примеры взяты из корпусов и из источников в Интернете. Любые мнения в примерах не отражают мнение редакторов Cambridge Dictionary, Cambridge University Press или его лицензиаров.
Влияние рабочей скорости на пропускную способность участков среднего блока городских магистралей
Данные о дорожном движении, собранные в полевых условиях, были проанализированы для построения кривых скорость – объем для оценки пропускной способности участков среднего блока городских дорог. Движение на индийских дорогах неоднородно по своей природе с большим разбросом статических и динамических характеристик различных типов транспортных средств. Требуется преобразовать все транспортные средства в транспортном потоке в эквивалентное количество легковых автомобилей с использованием концепции блока легковых автомобилей (PCU).Коэффициенты PCU для различных типов транспортных средств выводятся в следующем разделе.
Оценка факторов PCU
Различные исследователи использовали разные подходы для оценки значений PCU транспортных средств. Используемые критерии: задержка [14], скорость [15, 16], плотность [17, 18], интервал [19] и поток разгрузки очереди [20]. Собственно говоря, основа для оценки PCU должна быть такой же, как и при определении уровня обслуживания (LOS) для типа проезжей части. Это связано с тем, что переменные, которые используются для определения LOS, отражают факторы, влияющие на восприятие водителя [19].Скорость — это показатель эффективности, который точно измеряется и легко воспринимается всеми пользователями проезжей части. Более того, любое изменение геометрии дороги или условий движения приведет к изменению скорости. Таким образом, скорость считается основной переменной для определения относительного влияния отдельных транспортных средств на транспортный поток с точки зрения PCU. Основная концепция, используемая для оценки PCU в настоящем исследовании, заключается в том, что она прямо пропорциональна соотношению скорости и обратно пропорциональна коэффициенту занятости пространства по сравнению с транспортным средством стандартной конструкции, которым является автомобиль [21].
$$ {\ text {PC}} {{\ text {U}} _ i} = \ frac {{{{{V _ {\ text {c}}}} \ mathord {\ left / {\ vphantom {{ {V _ {\ text {c}}}} {{V_i}}}} \ вправо. \ kern- \ nulldelimiterspace} {{V_i}}}}} {{{{{A _ {\ text {c}}}} \ mathord {\ left / {\ vphantom {{{A _ {\ text {c}}}) } {{A_i}}}} \ правильно. \ kern- \ nulldelimiterspace} {{A_i}}}}} $$
(1)
где В c — скорость автомобиля (км / ч), V и скорость автомобиля типа i (км / ч), A c проецируемая прямоугольная в плане площадь автомобиля, а A и проецируемая прямоугольная площадь в плане транспортного средства и (м 2 ).
В приведенном выше уравнении первая переменная передаточного отношения будет функцией состава транспортного потока, поскольку скорость любого типа транспортного средства зависит от его собственной пропорции, а также типов и пропорций других транспортных средств. Следовательно, скорость любого типа транспортного средства будет истинным представлением общего взаимодействия типа транспортного средства из-за присутствия других транспортных средств. Вторая переменная отношения пространства указывает на маневренность и размер транспортного средства (занятость дорожного покрытия) по отношению к автомобилю, что имеет решающее значение в условиях смешанного движения.
Данные о трафике, собранные в полевых условиях, были использованы для получения значений PCU для различных типов транспортных средств на разных участках. Записанный фильм был воспроизведен на большом экране монитора, и был произведен 5-минутный подсчет засекреченного объема трафика. Чтобы обеспечить точность подсчета, транспортные средства одной конкретной категории были подсчитаны в одном раунде воспроизведения фильма, и фильм был перемотан столько раз, сколько категорий транспортных средств в подсчете. Состав трафика на разных участках представлен в таблице 1.Для измерения скорости транспортных средств, включенных в 5-минутный счет, время, затраченное транспортным средством на преодоление ловушки длиной 60 м, регистрировалось с точностью до 0,01 с с использованием программного обеспечения, разработанного для этой цели. Данные скорости были использованы для получения значений PCU для различных типов транспортных средств с использованием уравнения. (1). Было обнаружено, что эти значения PCU различаются в разные периоды подсчета, а также на разных участках. В таблице 3 приведены среднее и стандартное отклонение значений PCU, рассчитанных в различных разделах. Различия в значениях PCU для разных типов транспортных средств объясняются изменением состава транспортного потока и поведения водителей в разных городах.
Таблица 3 Коэффициенты PCU на разных участках городских дорогОценка пропускной способности
Получение коэффициентов PCU позволило выразить транспортный поток в единицах легковых автомобилей. Таким образом, было возможно построить график зависимости скорости от потока для каждого периода анализа продолжительностью 5 минут. Скорость на этих графиках была принята как среднее значение скоростей всех транспортных средств, включенных в 5-минутный подсчет, и эта скорость упоминается как средняя скорость потока ( V м ) в последующем обсуждении.Графики скорость-расход для двух участков показаны на рис. 1. Подобные графики были построены и на других участках, и было замечено, что на большинстве участков не учитывались потоки мощности, а на некоторых участках данные скорости-расхода следовали линейному тренду. и нелинейные в других. Однако одной общей чертой всех этих графиков было то, что скорость потока зависит от потока с самого начала кривой. Он интуитивно предполагал, что данные о скорости и плотности при смешанном транспортном потоке будут соответствовать либо линейной модели Гриншилда, либо логарифмической модели Гринберга.Поэтому данные скорость-расход были преобразованы в данные скорость – плотность с использованием фундаментальной взаимосвязи между скоростью, плотностью и расходом. Эти данные для раздела D-6-1 показаны на рис. 2. Различные модели, такие как модели Гриншилда, Гринберга и Андервуда, пытались подогнать под эти данные. Было установлено, что модель Greenshield наилучшим образом описывает кривую скорость – плотность на основе R 2 значение, как показано на рис. 2, и, следовательно, прямолинейное соотношение скорость – плотность использовалось для построения полной кривой скорость – объем, как показано на рис.3. Производительность 6075 PCU / час в одном направлении потока на секции.
Рис. 1Графики скорость – расход на участках J-6-1 и C-6-1
Рис. 2Соотношение скорость – плотность на участке D-6-1
Рис. 3Соотношение скорость – объем на участке D-6-1
Аналогичное упражнение было проделано и на всех других участках. Было обнаружено, что модель Гриншилда лучше других соответствует данным скорость – плотность на всех участках.На рис. 4 показано несколько типичных кривых. В таблице 4 приведены значения пропускной способности на различных участках 6-полосных и 4-полосных дорог. Как можно заметить, пропускная способность 6-полосных дорог варьируется от 1500 PCU / ч / полоса для участка C-6-1 до 2105 PCU / ч / полоса для участка D-6-3, тогда как пропускная способность 4-полосных участков дороги варьируется от От 1482 PCU / ч / дорожка (секция J-4-1) до 2043 PCU / час / дорожка (секция D-4-1). Это изменение может быть связано с размером города на пропускной способности. В последнем столбце Таблицы 4 показана средняя пропускная способность полосы движения по оценкам в разных городах.На рисунке 5 показано влияние размера города на пропускную способность городских дорог.
Рис. 4Типичные кривые скорость – плотность потока
Таблица 4 Пропускная способность и ППС на городских магистралях Рис.5Изменение средней пропускной способности полосы в зависимости от города
Максимальная рабочая скорость — Klingspor Abrasive Technology
Максимальная рабочая скорость абразивных инструментов — это максимальная скорость, с которой вращающиеся абразивные материалы могут работать при установке на соответствующие шлифовальные машины во время нанесения.
Он указывается в м / с и определяется применимыми стандартами (например, DIN EN 12413, DIN EN 13743 и DIN EN 13236), чтобы избежать и снизить риски. Эти стандарты также определяют различные уровни возможных максимальных рабочих скоростей, в соответствии с которыми должны производиться абразивные материалы, а также идентификацию этих уровней и максимально допустимые скорости вращения в зависимости от диаметра.
Хотя больше не является обязательной, цветовая кодировка, используемая для обозначения максимальной рабочей скорости, которая до недавнего времени требовалась нормативными актами, по-прежнему часто используется в виде цветных полос, наносимых на абразивные инструменты (например,грамм. 50 м / с = синяя полоса; 63 м / с = желтая полоса, 80 м / с = красная полоса; 100 м / с = зеленая полоса,…).
Из соображений безопасности пользователь должен строго следить за тем, чтобы не превышать максимальную рабочую скорость, указанную для абразива.
Как один из основателей oSa, Klingspor придает первостепенное значение безопасности своих абразивов, а также методам тестирования и маркировки, требуемым применимыми стандартами, обеспечивая тем самым строгое соответствие стандартам DIN EN 12413 (для связанных абразивных материалов, таких как режущие отрезных кругов и шлифовальных дисков или абразивов R-Flex), DIN EN 13743 (для абразивов с покрытием, таких как абразивные диски для швабры, абразивные круги для швабр, навесные диски, фибровые диски и опорные диски из фибровых дисков) и DIN EN 13236 (для абразивных инструментов с алмазы и CBN).
Максимальная рабочая скорость соответствует следующим абразивным инструментам, входящим в ассортимент Klingspor:
- фибровые диски и опорные подушки фибровых дисков (80 м / с)
- Отрезные и шлифовальные круги Kronenflex (80 м / с для работы вне руки, 100 м / с для стационарной резки)
- Круги шлифовальные для чашек Kronenflex (50 м / с)
- абразивные диски для швабры (80 м / с)
- чистящее колесо NCD 200 (63 м / с)
- диски из прессованного нетканого материала MFW 600 (47/37 м / с)
- круги абразивной швабры (50 м / с; за исключением кругов абразивной швабры шириной w> 100 мм (30 м / с) и шлифованных кругов абразивной швабры (40 м / с)).
- точка навесная / навесное колесо (40 м / с)
- алмазные отрезные диски (80 м / с для лезвий, установленных на угловых шлифовальных машинах; 100 м / с для лезвий, предназначенных для бензопил, швонарезчиков и настольных пил)
- алмазные шлифовальные диски (80 м / с) Абразив
- с эластичной связкой, включая круги R-Flex, насадки и точки с пятнами.
Для этих инструментов максимальная рабочая скорость зависит от связки абразива (5 м / с для абразивов с W-образной связкой; 16 м / с для абразивов с E-образной связкой; 32 м / с для абразивов с E-образной связкой). Z-образная облигация)
Вернуться к Термины и определения шлифовки .