Электромеханические системы
Содержание статьи
1. Классификация электромеханических систем
2. Функциональное представление и направления проектирования электромеханической системы
Классификация электромеханических систем
Определение 1
Электромеханическая система – это совокупность электрических, электронных, электромеханических, информационных и механических преобразователей энергии, которые связаны между собой.
Электромеханические системы делятся на системы автоматики и общепромышленные системы. Основная задача общепромышленных электромеханических систем заключается в обеспечении силовых характеристик — коэффициента полезного действия, тока, момента и т.п. Главной проблемой, которая решается на этапе проектирования общепромышленной электромеханической системы, является выбор преобразовательного устройства, которое будет способно обеспечивать необходимые напряжения, а также токи питания.
Электромеханическая система автоматики представляет собой часть системы автоматического управления высокого уровня. Такие системы отличаются от общепромышленных более строгими требованиями к качеству регулирования, меньшими показателями мощности, а также они являются замкнутыми. Как правило, в электромеханических системах автоматики используются преобразовательные устройства мощностью до 10 киловатт. Главная проблема при проектировании электромеханической системы автоматики — обеспечение необходимых показателей качества регулирования. Из-за этого данным систем свойственна более сложная структура и большее разнообразие датчиков и управляющих устройств.
Такие системы отличаются от общепромышленных более строгими требованиями к качеству регулирования, меньшими показателями мощности, а также они являются замкнутыми. Как правило, в электромеханических системах автоматики используются преобразовательные устройства мощностью до 10 киловатт. Главная проблема при проектировании электромеханической системы автоматики — обеспечение необходимых показателей качества регулирования. Из-за этого данным систем свойственна более сложная структура и большее разнообразие датчиков и управляющих устройств.
Электромеханические системы могут классифицироваться по следующим признакам:
- По принципу построения замкнутой системы.
- По наличию обратных связей. По данному признаку электромеханические системы делятся на замкнутые и разомкнутые.
- По способу управления электрическим двигателем.
- По основной управляемой координате. По данному признаку электромеханические системы делятся на моментные, позиционные и скоростные.
- По возможности регулирования.
 По данному признаку электромеханические системы делятся на нерегулируемые и регулируемые.
По данному признаку электромеханические системы делятся на нерегулируемые и регулируемые. - Типу используемого электрического двигателя. По данному признаку электромеханические системы делятся на системы постоянного и переменного тока, а также синхронные и асинхронные.
- По типу преобразовательного устройства. По данному признаку электромеханические системы делятся на системы “управляемый привод — двигатель система”, “генератор-двигатель”, “преобразователь частоты-двигатель” и т.п.
Функциональное представление и направления проектирования электромеханической системы
Современная электромеханическая система может быть представлена, как совокупность следующих элементов:
- Технологического агрегата, который обеспечивает материальную реализацию технологического процесса.
- Автоматизированного электрического привода, который осуществляет необходимое движение технологического агрегата.
- Устройства управления, которые обеспечивают выполнение программ технологического процесса.

- На рисунке ниже представлен пример схемы функционального состава электромеханической системы.
Рисунок 1. Схема функционального состава электромеханической системы. Автор24 — интернет-биржа студенческих работ
Ро — программа выполнения технологического процесса; U — сигналы управления автоматизированного электропривода; Р — показатели технологического процесса; Fa. Ft — возмущающие воздействия.
Современное развитие электромеханических систем основано на совершенствовании технических средств и поиске новых алгоритмов управления. В проектировании электромеханических систем основными направлениями являются: автономное управление элементами системы; совместное проектирование технологического агрегата и автоматизированного электропривода; совместное проектирование всех составляющих электромеханической системы; совместное проектирование силовых частей технологического агрегата и автоматизированного электрического привода, с последующим совместным проектированием устройств авторизированного электропривода и системы в целом.
В случае отказа от принципов совместного проектирования элементов электромеханической системы возникает необходимость в в экспериментальной доводке, из-за которой общие фактические затраты на проектирование значительно возрастают относительно проектных. Поэтому основное направление развитие — совместное проектирование силовых частей автоматизированного электропривода и технологического агрегата с последующим совместным проектированием устройств авторизированного электропривода и системы в целом.
Сам процесс проектирования электромеханической системы, можно разделить на функциональное, конструкторское, технологическое и техническое проектирование. Одним из самых сложных является функциональное проектирование, которое заключается в создании математических моделей систем управления, которые должны обеспечивать выполнение заданных целей.
Сообщество экспертов Автор24
Автор этой статьи Дата последнего обновления статьи: 13.04.2022
1 Электромеханические системы и устройства
Предмет изучения курса «Электромеханические системы и устройства»
Электромеханические
системы занимают центральное место в
подавляющем большинстве технических
систем. Основная определяющая их функция
— преобразование электрической энергии
в управляемую механическую. Т.е. они
обеспечивают возможность регулирования
параметров механического движения
объектов управления (скорость, ускорение,
угловое или линейное перемещение, сила,
момент и др.). Как правило, данная функция
должна выполняться автоматически.
Основная определяющая их функция
— преобразование электрической энергии
в управляемую механическую. Т.е. они
обеспечивают возможность регулирования
параметров механического движения
объектов управления (скорость, ускорение,
угловое или линейное перемещение, сила,
момент и др.). Как правило, данная функция
должна выполняться автоматически.
В промышленности, науке, в быту используются разнообразные машины, механизмы и устройства, которые облегчают деятельность человека, повышают производительность и качество, уровень безопасности и комфортности и т.д. Приведем несколько примеров:
в промышленности — приводы станков, бумагоделательных машин, подъемно-транспортного оборудования и др.
в научных исследованиях — приводы и следящие системы телескопов, системы пространственного управления лазерным излучением, прецизионные микроподвижки и т.д.
в быту — кондиционеры,
пылесосы, стиральные и посудомоечные
машины./12-06-12(3)/12-06-12(4)/LQPl5i_dIT0_720x540_35e.jpg)
В данном курсе студенты должны познакомиться с основными типами электромеханических систем и устройств и входящими в их состав элементами, изучить принцип действия и их основные характеристики, получить необходимые знания и практические навыки по расчету и выбору исполнительных устройств, по способам управления ими и их математическому моделированию.
Все технические средства автоматики можно представить в виде иерархической структуры, состоящей из трех уровней:
1. Системы управления и автоматического регулирования (высший уровень).
2. Автоматические регуляторы, следящие приводы и подсистемы (средний уровень).
3. Элементы и устройства подсистем, регуляторов, приводов и систем автоматического управления (нижний уровень).
Предметом изучения данного курса является нижний — базовый
уровень
элементной базы систем автоматического
управления.
В настоящее время разрабатывается и выпускается огромное разнообразие электромеханических устройств и элементов, выполняющих одни и те же функции, но отличающихся по принципу действия, конструктивному исполнению, способам управления и т.д.
Будущим специалистам по разработке и эксплуатации систем автоматического управления необходимо не только хорошо знать элементную базу, но и уметь выбирать из нее самые рациональные варианты решений с учетом условий работы и предъявляемым техническим требованиям.
Рассмотрим два классических примера автоматических электромеханических систем.
Следящая система «угол-угол». Обеспечивает автоматическую отработку угла поворота объекта управления (антенна радиолокационной станции, видеокамера) по заданию оператора. Функциональная схема такой системы приведена на Рисунок1.
Система работает следующим образом. Оператор с помощью
задающего
устройства (ЗУ) вводит угол ,
на который нужно повернуть объект
управления (ОУ).
Под действием сигнала рассогласования двигатель начинает вращаться.
Начинает
вращаться и объект управления, который
механически связан через понижающий
редуктор (Р) с валом двигателя. При этом
разность углов
и
уменьшается, а в момент, когда она будет
равна нулю, происходит остановка
двигателя, так как U— тоже будет равно нулю. Таким образом,
ОУ повернется на заданный угол .
При этом
разность углов
и
уменьшается, а в момент, когда она будет
равна нулю, происходит остановка
двигателя, так как U— тоже будет равно нулю. Таким образом,
ОУ повернется на заданный угол .
Следящая система «угол-угол» по своему функциональному назначению и составу элементов является характерным примером электромеханических систем автоматического управления.
Другим примером может быть система автоматической стабилизации скорости вращения электродвигателя, широко используемая в том или ином исполнении во многих сложных технических устройствах. Функциональная схема системы стабилизации скорости приведена на рисунке 1.2.
Система
стабилизации предназначена для
поддержания заданной скорости вращения
двигателя вне зависимости от изменений
нагрузки (момента нагрузки на валу
двигателя) и других внешних возмущающих
факторов. В отличие от первого примера,
в данной системе реализуется отрицательная
обратная связь по скорости вращения
двигателя. Для этой цели служит
тахогенератор (ТГ), представляющий собой
электромашинный преобразователь
скорости вращения в пропорциональное
ей электрическое напряжение. ТГ
располагается на одной оси с двигателем
(целый ряд современных двигателей
содержат встроенный тахогенератор), а
двигатель через редуктор связан с
исполнительным органом (ИО), который
необходимо вращать с постоянной заданной
скоростью. Как и в первом примере здесь
реализован принцип регулирования по
отклонению. При отклонении скорости
вращения ИО от заданной, в силу указанных
выше причин, УПУ формирует сигнал
рассогласования и подает его на управление
двигателем, который изменяет скорость
вращения, сводя это рассогласование к
минимальному значению.
Для этой цели служит
тахогенератор (ТГ), представляющий собой
электромашинный преобразователь
скорости вращения в пропорциональное
ей электрическое напряжение. ТГ
располагается на одной оси с двигателем
(целый ряд современных двигателей
содержат встроенный тахогенератор), а
двигатель через редуктор связан с
исполнительным органом (ИО), который
необходимо вращать с постоянной заданной
скоростью. Как и в первом примере здесь
реализован принцип регулирования по
отклонению. При отклонении скорости
вращения ИО от заданной, в силу указанных
выше причин, УПУ формирует сигнал
рассогласования и подает его на управление
двигателем, который изменяет скорость
вращения, сводя это рассогласование к
минимальному значению.
Анализируя
состав и структуру рассмотренных систем
можно увидеть в них много общего и
сделать вывод о наличии некоторого
базового комплекса элементов и устройств
присущего электромеханическим системам.
Этот комплекс называется — электроприводом.
В его состав могут входить электромашинные
устройства различного назначения
(двигатели, преобразователи, генераторы
и т. д.), электронные устройства (усилители,
широтно-импульсные преобразователи,
модуляторы и демодуляторы и т.д.) и
д.), электронные устройства (усилители,
широтно-импульсные преобразователи,
модуляторы и демодуляторы и т.д.) и
механические преобразовательные устройства (редукторы, винтовые и червячные передачи и др.).
Современный электропривод является индивидуальным автоматизированным электроприводом. Он включает в себя систему автоматического управления (САУ), которая в простейшем случае осуществляет пуск и останов электродвигателя, а в более сложных случаях управляет технологическим процессом приводимого в движение исполнительного механизма.
Мощность автоматизированного электропривода охватывает диапазон от нескольких долей ватта до десятков тысяч киловатт.
Автоматизированный
электропривод делится на управляемый
и неуправляемый, постоянного, переменного
тока, транзисторный и тиристорный. До
недавнего времени в качестве регулируемого
электропривода применялся электропривод
постоянного тока. В последние годы
значительные успехи в силовой
преобразовательной технике привели к
созданию надежных регулируемых
транзисторных и тиристорных электроприводов
переменного тока. Так как двигатели
переменного тока имеют неоспоримые
преимущества перед двигателями
постоянного тока (они значительно
дешевле, надежнее, имеют лучшие
массогабаритные показатели и относительно
простую конструкцию) в ближайшие годы
ожидается бурное развитие управляемого
электропривода переменного тока. Этому
способствует широкое внедрение в
управляемый электропривод микропроцессорной
техники.
Так как двигатели
переменного тока имеют неоспоримые
преимущества перед двигателями
постоянного тока (они значительно
дешевле, надежнее, имеют лучшие
массогабаритные показатели и относительно
простую конструкцию) в ближайшие годы
ожидается бурное развитие управляемого
электропривода переменного тока. Этому
способствует широкое внедрение в
управляемый электропривод микропроцессорной
техники.
Стремление к упрощению кинематических цепей машин и механизмов привело к созданию безредукторных электроприводов, которые по сравнению с редукторными обладают большей надежностью и быстродействием, технологичнее в изготовлении. Предельно упрощает кинематику машин применение управляемого электропривода на базе линейных электрических машин постоянного и переменного тока. При этом создаются максимальные удобства для оптимального конструирования машин с поступательным движением рабочих органов.
Приведем
обобщенную функциональную схему
электропривода, которая содержит все
возможные устройства и поясняет их
взаимодействие и взаимовлияние. Обобщенная функциональная схема
электропривода приведена на рисунке
2.1, где ИЭ — источник энергии (промышленная
электросеть, электромашинный генератор,
аккумулятор), ЭПУ — электрическое
преобразовательное устройство
(управляемый выпрямитель, широтно-импульсный
преобразователь, электронный или
электромашинный усилитель), ДУ —
двигательное устройство (электродвигатель,
пьезоэлектрический или магнитострикционный
двигатель, электромагнитный двигатель),
Обобщенная функциональная схема
электропривода приведена на рисунке
2.1, где ИЭ — источник энергии (промышленная
электросеть, электромашинный генератор,
аккумулятор), ЭПУ — электрическое
преобразовательное устройство
(управляемый выпрямитель, широтно-импульсный
преобразователь, электронный или
электромашинный усилитель), ДУ —
двигательное устройство (электродвигатель,
пьезоэлектрический или магнитострикционный
двигатель, электромагнитный двигатель),
МПУ-механическое преобразовательное устройство (редуктор, шарико-винтовая или червячная передача, кинематическая передача), ИО- исполнительный орган рабочей машины (турбина, вентилятор, оптические элементы приборов), УУ- устройство управления
(микропроцессор,
управляющая ЭВМ), ЗУ — задающее устройство
(ЭВМ, аналоговое устройство), ДПИ — датчики
преобразователи информации (тахогенератор,
термопара, индуктивные и емкостные
датчики), сплошными одинарными стрелками
обозначены аналоговые электрические
сигналы постоянного иди переменного
тока, пунктирные стрелки обозначают
сигналы, наличие которых или отсутствие,
а также форма определяются условиями
конкретной технической системы, двойные
стрелки обозначают механические связи.
Функции, выполняемые устройствами, входящими в состав электропривода:
ИЭ -обеспечение электропитанием всех элементов и устройств электропривода;
ЭПУ- преобразует сигнал управления в форму требуемую данным двигательным устройством;
ДУ — преобразует электрическую энергию в механическую;
МПУ — обеспечивает изменение параметров вырабатываемой ДУ механической энергии;
ИО — выполняет заданные функции;
УУ-вырабатывает сигнал управления в функции задающего сигнала и различных дополнительных электрических сигналов, содержащих информацию о процессе преобразования энергии, реальных параметрах механического движения ДУ и ИО, кроме того, обеспечивает защиту и блокировку всех электромеханических устройств, входящих в составу электропривода.
ЗУ — формирует сигнал задания на УУ.
ДПИ
— датчики-преобразователи информации
служат для измерения различных координат
электропривода (скорость вращения, ток,
угол поворота и др. ) и преобразования
их в электрические сигналы одинакового
вида.
) и преобразования
их в электрические сигналы одинакового
вида.
Основными элементами электропривода являются электрические машины, которые могут выполнять функции двигательных устройств, источников энергии, датчиков преобразователей информации.
Электромеханические системы автоматизации | Festo
Единая интегрированная платформа для всех ваших задач по автоматизации.
В рамках единой платформы для электрических систем автоматизации достигается слаженное взаимодействие всех ее компонентов. От электромеханических систем, сервомоторов и сервоприводов до систем позиционирования, перемещения и управления движением, а также децентрализованных технических решений по управлению. Программное обеспечение Festo Automation Suite — всегда верное решение по вводу в эксплуатацию.
У вас сохраняется полная гибкость действий, поскольку вы самостоятельно принимаете решение о глубине автоматизации с использованием продукции Festo и о том, какие из наших решений интегрировать в ваши внутренние стандарты. Благодаря этому вы можете постепенно переоснащать ваши системы, не выходя за рамки бюджета.
Благодаря этому вы можете постепенно переоснащать ваши системы, не выходя за рамки бюджета.
Механическое взаимодействие
Широкий спектр механических линейных приводов и поворотных модулей, совместимых с нашими сервомоторами — это практически неограниченные возможности для автоматизации перемещений оборудования в соответствии с внутренними стандартами вашего предприятия.
Электрическое взаимодействие
Наши сервомоторы и сервоприводы — это идеальное связующее звено между вашей механической системой и технологией управления. Они всегда оптимально скоординированы, легко конфигурируются и вводятся в эксплуатацию с помощью программного обеспечения Festo Automation Suite.
Интеллектуальное взаимодействие
Свободный гибкий обмен информацией и прямая полная интеграция наших сервоприводов в системы управления более высокого уровня, а также децентрализованное управление отдельными технологическими модулями с использованием интегрированных решений компании Festo по управлению движением, которые обеспечивают работу широкого спектра систем промышленной автоматизации. Для проектирования и конфигурирования таких систем специально разработаны инновационные программные решения.
Для проектирования и конфигурирования таких систем специально разработаны инновационные программные решения.
Серводвигатель CMMT-AS и серводвигатель EMMT-AS
Законченная приводная система, состоящая из сервопривода и серводвигателя, с полной интеграцией аппаратного и программного обеспечения.
Сервопривод CMMT-AS и серводвигатель EMMT-AS соединены с помощью одного кабеля и могут быть быстро и легко введены в эксплуатацию с помощью Festo Automation Suite.
- Для позиционного и интерполяционного движения с акцентом на высокую динамику и точное позиционирование
- Полная интеграция с другими сторонними концепциями управления или непосредственно в систему управления CPX-E компании Festo
- Компактная и оптимизированная конструкция корпуса, а также продуманная двусторонняя концепция управления и подключения обеспечивают минимальные требования к свободному пространству в шкафе управления
Щелкните здесь для более подробной информации о сервоприводном решении
ПО Festo Automation Suite для ввода в эксплуатацию
Программное обеспечение для ввода в эксплуатацию всей приводной системы – от механической системы до контроллера. Простота и последовательность: оптимальная параметризация и программирование с использованием программного обеспечения Festo Automation Suite.
Простота и последовательность: оптимальная параметризация и программирование с использованием программного обеспечения Festo Automation Suite.
- Значительное упрощение ввода в эксплуатацию всей приводной системы, включая механическую систему
- Подготовьте и запустите приводную систему всего за 5 шагов с помощью мастера первоначального ввода в эксплуатацию.
- Всего 2 щелчка мыши вместо 100: значительное упрощение интеграции сервоконтроллера CMMT-AS в программу управления с CPX-E-CEC
- Устанавливайте подключаемые модули и надстройки удобно, надежно и без ошибок непосредственно из программного обеспечения.
- Получайте доступ к информации об устройствах и инструкциям для всех компонентов системы непосредственно из программного обеспечения
- Интегрированные возможности программирования контроллера с технологией CODESYS для управления движением и функциями промышленных роботов
Подробную информацию о Festo Automation Suite можно узнать здесь
Модульная система управления CPX-E
CPX-E – система автоматизации с мастер-контроллером EtherCAT® и контроллером перемещений или компактным и экономичным устройством удаленных входов/выходов
- Мастер-интерфейс EtherCAT®, а также слэйв-интерфейс PROFINET и EtherNet/IP
- Стандартизированный интерфейс программирования CODESYS V3, начиная с SP10
- Встроенные функции движения, например SoftMotion
- Опциональный дисплей CDSB
Подробнее о CPX-E
Шпиндельные приводы и приводы с зубчатым ремнем ELGC и мини суппорты EGSC
Чрезвычайно компактные и недорогие системы перемещения
- Компактные решения с оптимальное соотношением между монтажным и рабочим пространством
- Расширяемая модульная система, включающая в себя линейные приводы и мини-суппорты
- Уникальная система сборки «на один размер меньше»
Шпиндельный привод ELGC-BS
- Расположенный внутри шпиндель с шариковинтовой передачей для точного и плавного хода
- Недеформируемая высокоточная направляющая для работы с большими усилиями
Подробнее о приводе ELGC
Привод с зубчатым ремнем ELGC-TB
- Расположенный внутри привод с зубчатым ремнем для динамичного перемещения, в том числе при высоких нагрузках
- Недеформируемая высокоточная направляющая для работы с большими усилиями
Подробнее о приводе ELGC
Мини-суппорт EGSC-BS
- Мини-суппорт с шариковой направляющей и линейной направляющей
- Поглощение больших усилий и моментов в сочетании с малошумной работой шпинделя и высокоточным позиционированием
Подробнее о мини-суппорте EGSC
Специализированные системы перемещения
Мощность и соответствие Вашим задачам: мы предлагаем Вам как стандартизированные, так и индивидуальные готовые к монтажу системы перемещения, которые сокращают все процессы от проектирования до ввода в эксплуатацию.
- Системы перемещения и сборки на базе последовательной кинематики с рабочим ходом до 3000 мм — предварительно собранные и испытанные: одноприводные системы, линейные, двухкоординатные и трехкоординатные порталы
- Комплексные системы для высокодинамичного перемещения и позиционирования: высокое ускорение, высокая полезная нагрузка и оптимальный охват рабочей зоны с выполнением до 90 подхватов/мин.
- Компактные системы перемещения, требующие минимального места для установки: компактные и низкопрофильные для оптимального использования рабочего пространства, например, при сборке мелких деталей в электронной промышленности или при автоматизации лаборатории
Подробнее о системах перемещения
Компактные решения для электронной промышленности
Быстрое и точное производство небольших компонентов при минимальной потребности в рабочем пространстве: для таких задач мы разработали компактные и экономичные решения для автоматизации.
Подробнее об этих решениях
Захват и остановка движения
To view this video please enable JavaScript, and consider upgrading to a web browser that supports HTML5 video
Электрический стандартный захват EHPS
Простой, практичный, электромеханический!
- Сквозные отверстия для простого монтажа
- Для электрического подключение используется кабельный жгут с вилкой
- Направляющая для губок захвата, обеспечивающая высокую устойчивость изгибающему моменту
- Губки захвата с профилем и прочной направляющей скольжения для обеспечения сопротивления изгибу
- Паз с датчиком для определения положения губок захвата
- Индикатор состояния питания и вывода сообщений об ошибках
Подробнее об электрическом стандартном захвате EHPS
Электрический стопорный цилиндр EFSD
Стопор для Вашей системы транспортировки
- Легкая процедура установки
- Может подключаться напрямую
- Может активироваться через входы/выходы 24 В
- Регулируемое демпфирование
- Встроенный датчик положения стопора
Подробнее об электрическом стопоре EFSD
Транспортная система MCS®
MCS® — транспортирование и динамическое позиционирование с системой Multi-Carrier.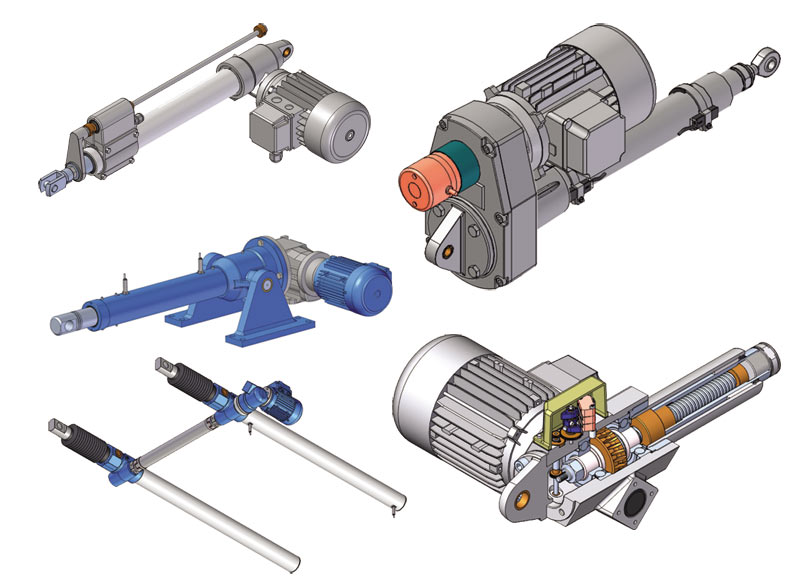 Для решения этой задачи возможно свободное встраивание модульной транспортной системы в существующую интралогистику.
Для решения этой задачи возможно свободное встраивание модульной транспортной системы в существующую интралогистику.
С MCS® Вы оптимизируете производительность своего оборудования и обеспечиваете гибкость производства при серийном выпуске продукции с любым размером партии.
Гибкость
- Каждая каретка может перемещаться абсолютно свободно
- Переналадка одним нажатием кнопки
Быстрота
- Отличная динамика, даже при больших нагрузках
- Минимальное время переключения
Эффективность
- Технология MCS® только для оборудования, имеющего отношение к технологическому процессу
- Серийное производство партий любого размера
Подробнее о Multi-Carrier-System
Электрическая система позиционирования: Optimised Motion Series
Вы удобно конфигурируете комплектное решение, состоящее из механической системы, контроллера и программного обеспечения согласно вашим требованиям — с лучшим соотношением цены и качества.
Простое перемещение и позиционирование при использовании как отдельного привода, так и высокорентабельного многоприводного решения.
- Один код заказа для выбора и конфигурирования изделия
- Настройка конфигурации движения и позиционирования посредством Web-конфигуратора
- Быстрое и простое управление и ввод в эксплуатацию
- Свобода выбора: положение, усилие и скорость перемещения, а также свободно настраиваемые профили движения
Подробнее об электромеханической системе позиционирования
Как работают электромеханические системы
Почти каждое движущееся устройство приводится в действие электромеханической системой. Эти системы присутствуют в большинстве электродвигателей, соленоидов и мехатроников. От автомобильных стеклоподъемников и сидений с электроприводом до стиральных и сушильных машин — многие продукты, которые мы используем в повседневной жизни, зависят от этих систем. Вот три наиболее распространенные электромеханические системы и устройства и то, как они работают.
Вот три наиболее распространенные электромеханические системы и устройства и то, как они работают.
Электрические двигатели представляют собой электрические машины, которые преобразуют электрическую энергию (электричество) в механическую энергию (крутящий момент) с помощью системы зубчатых передач и магнитных полей, приводимых в действие электрической системой. Электрические системы могут получать энергию из ряда различных источников постоянного тока (DC) и переменного тока (AC), включая батареи и выпрямители (источники постоянного тока), а также электрические сети, инверторы и электрические генераторы (источники переменного тока). Обычные продукты, в которых используются электродвигатели, включают вентиляторы, блендеры и электрические стеклоподъемники.
Конечно, электродвигатели не ограничиваются только бытовым применением. Электродвигатели неразрывно связаны с некоторыми вещами, которые делают возможной глобализацию. Например, электродвигатели используются для приведения в движение некоторых из крупнейших грузовых судов, доставляющих товары со всего мира для внутреннего потребления. Электродвигатели также используются для сжатия нефти и природного газа, чтобы они могли безопасно перемещаться по трубопроводам, соединяющим скважину и нефтеперерабатывающий завод. энергия, чтобы соответствовать.
Электродвигатели также используются для сжатия нефти и природного газа, чтобы они могли безопасно перемещаться по трубопроводам, соединяющим скважину и нефтеперерабатывающий завод. энергия, чтобы соответствовать.
Вкратце, существует много типов и размеров электродвигателей, три основных категории которых работают в диапазоне более низкого напряжения (6-24 вольта). Это:
● Коллекторные двигатели постоянного тока
● Бесщеточные двигатели
● Шаговые двигатели
источник. Двигатель состоит из нескольких основных частей. Постоянные магниты, также известные как магниты статора, расположены снаружи корпуса двигателя, с одной стороны положительные, с другой отрицательные. К валу двигателя в центре двигателя подключено несколько проволочных (или якорных) обмоток (проволочная обмотка состоит из одного или нескольких витков провода, образующих непрерывную катушку, которая пропускает электрический ток), которые находятся в очередь соединена с металлическими пластинами. Обмотки также соединены с парой металлических пластин, называемых коммутатором. При работе металлические щетки соприкасаются с коллектором; когда к металлическим щеткам прикладывается постоянное напряжение, ток передается на коммутатор, который вызывает изменение магнитного поля вокруг катушек якоря, так что катушки вращаются между постоянными магнитами. Характеристики скорости и крутящего момента коллекторного двигателя могут быть изменены для адаптации к источнику питания. К преимуществам, связанным с щеточными двигателями постоянного тока, относятся относительно низкая стоимость приобретения, простота эксплуатации (просто подключите источник питания постоянного тока) и высокий выходной крутящий момент на низких скоростях, что может быть полезно при нагрузке на двигатель при запуске.
Обмотки также соединены с парой металлических пластин, называемых коммутатором. При работе металлические щетки соприкасаются с коллектором; когда к металлическим щеткам прикладывается постоянное напряжение, ток передается на коммутатор, который вызывает изменение магнитного поля вокруг катушек якоря, так что катушки вращаются между постоянными магнитами. Характеристики скорости и крутящего момента коллекторного двигателя могут быть изменены для адаптации к источнику питания. К преимуществам, связанным с щеточными двигателями постоянного тока, относятся относительно низкая стоимость приобретения, простота эксплуатации (просто подключите источник питания постоянного тока) и высокий выходной крутящий момент на низких скоростях, что может быть полезно при нагрузке на двигатель при запуске. Коллекторные двигатели обычно используются для электрических двигателей, кранов, бумагоделательных машин и сталепрокатных заводов, но правда в том, что они используются практически везде. Скорее всего, вы даже держите его на ладони прямо сейчас, поскольку, вероятно, в вашем смартфоне есть небольшой щеточный двигатель постоянного тока для создания тактильной обратной связи (вибрации). Поскольку щетки изнашиваются и требуют замены, бесщеточные двигатели постоянного тока, использующие силовые электронные устройства, вытеснили щеточные двигатели из многих приложений.
Поскольку щетки изнашиваются и требуют замены, бесщеточные двигатели постоянного тока, использующие силовые электронные устройства, вытеснили щеточные двигатели из многих приложений.
Сказав это, щеточные электродвигатели постоянного тока должны вызывать некоторую степень почтения, даже если бесщеточные двигатели постоянного тока заменяют их в некоторых приложениях. Коллекторные двигатели постоянного тока были первыми, кто предложил коммерческую жизнеспособность с точки зрения привода механической энергии, поэтому они, несомненно, сыграли значительную роль в формировании мира, который мы знаем сегодня.
1.2 Бесщеточный двигатель постоянного тока Подобно коллекторным двигателям постоянного тока и, как следует из названия, бесщеточные двигатели постоянного тока — это двигатели, работающие от электричества постоянного тока. Он состоит из постоянных магнитов, соединенных с ротором, и неподвижных катушек статора (электромагнитов). Когда ротор вращается, один или несколько датчиков, расположенных рядом с его краем, посылают сигнал в схему управления, которая последовательно включает обмотки статора. Преимущества бесщеточного двигателя по сравнению с щеточными двигателями заключаются в долговечности (щетки, используемые в щеточных двигателях, могут со временем изнашиваться, что, в свою очередь, сокращает общий срок службы двигателя), высокое отношение мощности к весу, высокая скорость и электронное управление. Поскольку бесщеточный двигатель управляется компьютером, он намного точнее. Точность бесколлекторных двигателей также можно повысить, увеличив количество электромагнитов на статоре.
Преимущества бесщеточного двигателя по сравнению с щеточными двигателями заключаются в долговечности (щетки, используемые в щеточных двигателях, могут со временем изнашиваться, что, в свою очередь, сокращает общий срок службы двигателя), высокое отношение мощности к весу, высокая скорость и электронное управление. Поскольку бесщеточный двигатель управляется компьютером, он намного точнее. Точность бесколлекторных двигателей также можно повысить, увеличив количество электромагнитов на статоре.
Компьютерное управление также в значительной степени отвечает за превосходную эффективность бесколлекторных двигателей; в то время как коллекторные двигатели постоянного тока работают с КПД около 75-80%, бесщеточные двигатели постоянного тока работают ближе к диапазону 85-90%. Бесщеточные двигатели работают тише, и нет возможности опасного искрения, поскольку внутри двигателя нет щеток. Чтобы найти недостаток, связанный с бесщеточными двигателями постоянного тока, можно посмотреть на первоначальные денежные вложения, которые они требуют, но этот недостаток быстро компенсируется долгим сроком службы этого двигателя.:quality(80)/images.vogel.de/vogelonline/bdb/600400/600461/original.jpg) Бесщеточные двигатели можно найти в компьютерной периферии (дисковые накопители, принтеры), ручных электроинструментах, робототехнике, используемой в промышленном секторе, и в транспортных средствах, от моделей самолетов до автомобилей.
Бесщеточные двигатели можно найти в компьютерной периферии (дисковые накопители, принтеры), ручных электроинструментах, робототехнике, используемой в промышленном секторе, и в транспортных средствах, от моделей самолетов до автомобилей.
В отличие от бесщеточных двигателей постоянного тока, для шаговых двигателей не требуются датчики. У них есть ротор с постоянными магнитами в центре, который может свободно вращаться внутри фиксированных катушек статора. С помощью схемы драйвера в катушки периодически подается ток, который создает магнитное поле. Отталкивание конца магнита с той же полярностью, что и у катушки, и притяжение другого заставляет магнит вращаться и двигатель работает. На более детальном уровне внутренний магнит разделен на множество секций, напоминающих зубья, которые вы, например, найдете на шестерне, используемой в часах. Внешняя катушка, окружающая магнит, имеет соответствующие «зубцы» и генерирует магнитные импульсы, необходимые для притяжения или отталкивания внутреннего магнита. Это приводит к тому, что колесо может двигаться очень точно. С точки зрения применения, шаговые двигатели можно найти в промышленной робототехнике, где точные движения робота и его способность сохранять неподвижность являются неотъемлемой частью производственного процесса. Шаговые двигатели часто очень энергоэффективны.
Это приводит к тому, что колесо может двигаться очень точно. С точки зрения применения, шаговые двигатели можно найти в промышленной робототехнике, где точные движения робота и его способность сохранять неподвижность являются неотъемлемой частью производственного процесса. Шаговые двигатели часто очень энергоэффективны.
Соленоид представляет собой тип электромагнита, который создает контролируемое магнитное поле, когда ток проходит через его провод, чтобы создать линейное движение. Его также можно использовать в качестве индуктора, а не электромагнита, препятствующего изменению электрического тока. Соленоид состоит из катушки проволоки в форме штопора, обернутой вокруг поршня, часто сделанного из железа. Поскольку в соленоидах используются электромагниты, которые можно включать и выключать с помощью компьютерного приложения или отключая ток, они особенно полезны в качестве переключателей или клапанов и обычно используются в таких продуктах, как ключи от машины, дверной звонок и множество автоматизированных промышленных систем. . Существуют различные типы соленоидов, в том числе следующие:
. Существуют различные типы соленоидов, в том числе следующие:
● Электромеханические соленоиды. Состоят из электромагнитно-индуктивной катушки, намотанной на подвижный стальной или железный стержень, и обычно используются в электронных маркерах для пейнтбола, автоматах для игры в пинбол, матричных принтерах и топливных форсунках.
● Вращающиеся соленоиды. Они используются для вращения храпового механизма при подаче питания и впервые были применены в 1950-х годах для автоматизации поворотных переключателей мгновенного действия в электромеханических элементах управления.
● Вращающиеся катушки тисков – это вращательная версия соленоида, которая широко используется в таких устройствах, как дисководы.
● Пневматические соленоидные катушки — это переключатель для направления воздуха к любому пневматическому устройству, позволяющий относительно небольшому сигналу управлять большим устройством. Это также интерфейс между электронными контроллерами и пневматическими системами.
● Гидравлические электромагнитные клапаны. Это клапаны, которые контролируют поток гидравлической жидкости и находятся в повседневных предметах домашнего обихода, таких как стиральные машины, для контроля потока и количества воды в барабане.
● Соленоиды автомобильного стартера. Это часть системы запуска автомобиля, используемая для запуска двигателя путем передачи большого электрического тока от автомобильного аккумулятора и небольшого тока от замка зажигания.
Мехатроника — это междисциплинарная область инженерии, которая сочетает в себе механику, электротехнику и информатику и часто считается объединением навыков, которые необходимы и будут необходимы для развития передового автоматизированного производства. Люди, которые работают на стыке этих дисциплин, могут также обладать обширными знаниями в области робототехники, электроники и телекоммуникаций, которым поручено создавать более простые и интеллектуальные системы.
Типичная мехатронная система улавливает сигналы из окружающей среды, обрабатывает их для генерации выходных сигналов, преобразуя их в силы, движения и действия. Многие продукты, которые раньше были чисто механическими, теперь полагаются на мехатронику для работы, включая различные автомобильные системы, такие как антиблокировочная система тормозов, а также предметы домашнего обихода, такие как цифровые зеркальные камеры. Такие системы представляют собой будущее электромеханической области.
Многие продукты, которые раньше были чисто механическими, теперь полагаются на мехатронику для работы, включая различные автомобильные системы, такие как антиблокировочная система тормозов, а также предметы домашнего обихода, такие как цифровые зеркальные камеры. Такие системы представляют собой будущее электромеханической области.
Инженеры-мехатроники занимаются различными видами деятельности: от работы с крупными промышленными роботами до создания чувствительных систем управления и разработки прототипов. Широта отраслей, в которых может найти себя инженер-мехатроник, так же разнообразна, как и сами проекты; Квалифицированные инженеры-мехатроники, безусловно, востребованы в производственной сфере, но потребность есть и в авиационной, горнодобывающей, оборонной и транспортной отраслях.
Электромеханические системы повсюду
Электромеханика существует с момента изобретения электричества и со временем становится все более сложной. Хотя электродвигатели по-прежнему будут играть важную роль в будущем, рынок смещается в сторону более мехатронных систем и систем на основе соленоидов. Если вы находите эти системы увлекательными и заинтересованы в том, чтобы присоединиться к миру электромеханики, ознакомьтесь с нашей программой для технических специалистов.
Если вы находите эти системы увлекательными и заинтересованы в том, чтобы присоединиться к миру электромеханики, ознакомьтесь с нашей программой для технических специалистов.
Первоначально опубликовано в сентябре 2018 г.
Penn State Engineering: технология электромеханического машиностроения
Современной промышленности нужны люди, которые могут работать с системами, машинами и продуктами, состоящими как из электрических, так и из механических элементов. Программа получения степени в области технологии электромеханического машиностроения (BS EMET) обеспечивает базовый охват во всех основных областях технологий, связанных с эксплуатацией и контролем производственных и производственных процессов, включая контрольно-измерительные приборы и методы мониторинга; принципы проектирования машин; автоматизированные методы управления; тепловые и гидротехнические науки; компьютеризированные производственные системы; принципы работы электрических и электронных схем; автоматизированное проектирование и проектирование; экономика производства; статистический анализ и контроль качества.
Эта программа аккредитована Комиссией по аккредитации инженерных технологий ABET, www.abet.org.
Степень в области технологии электромеханического машиностроения предлагается в следующих местах: Алтуна, Беркс, Файет, Нью-Кенсингтон и Йорк.
Образовательные цели программы
Через три-пять лет после выпуска выпускники программы EMET будут способны и активно:
- Способны и активно участвовать в спецификации, закупке или интеграции электромеханических систем
- Способен и активно участвует в эксплуатации, тестировании или обслуживании электромеханических систем
- Способность и активное участие в деятельности команды проекта
- Способность и активное участие в подготовке и доставке технической документации и коммуникаций
Результаты учащихся
По окончании обучения студенты EMET должны иметь:
- Способность выбирать и применять знания, методы, навыки и современные инструменты своих дисциплин в широко определенных инженерно-технологических мероприятиях
- Способность выбирать и применять знания в области математики, естественных наук, техники и технологий для решения инженерно-технических проблем, требующих применения принципов и прикладных процедур или методологий
- Возможность проведения стандартных испытаний и измерений; проводить, анализировать и интерпретировать эксперименты; и применять экспериментальные результаты для улучшения процессов
- Способность проектировать системы, компоненты или процессы для широко определенных задач инженерных технологий, соответствующих целям программы обучения
- Способность эффективно функционировать в качестве члена или лидера технической группы
- Способность выявлять, анализировать и решать общие инженерно-технические проблемы
- Способность эффективно общаться в отношении широко определенных видов деятельности в области инженерных технологий
- Понимание необходимости и способность заниматься самостоятельным непрерывным профессиональным развитием
- Понимание и приверженность выполнению профессиональных и этических обязанностей, включая уважение разнообразия
- Знание влияния инженерно-технических решений в социальном и глобальном контексте и
- Приверженность качеству, своевременности и постоянному совершенствованию
Кроме того, выпускники EMET должны продемонстрировать знания и техническую компетентность, чтобы:
- Использовать компьютерные инструменты черчения или проектирования для подготовки графических представлений электромеханических систем.

- Используйте анализ цепей, аналоговую и цифровую электронику, базовые приборы и компьютеры для определения характеристик, анализа и устранения неполадок в электромеханических системах.
- Используйте статику, динамику (или прикладную механику), прочность материалов, инженерные материалы, инженерные стандарты и производственные процессы, чтобы помочь в характеристике, анализе и устранении неисправностей электромеханических систем.
- Используйте соответствующие языки программирования для управления электромеханическими системами.
- Использование электрических/электронных устройств, таких как усилители, двигатели, реле, системы питания, компьютеры и контрольно-измерительные системы, для прикладного проектирования, эксплуатации или устранения неполадок электромеханических систем.
- Используйте сложные темы инженерной механики, инженерных материалов и гидромеханики для прикладного проектирования, эксплуатации или устранения неполадок электромеханических систем.

- Использовать базовые знания систем управления для прикладного проектирования, эксплуатации. или устранение неисправностей электромеханических систем.
- Используйте как минимум дифференциальное и интегральное исчисление для характеристики статических и динамических характеристик электромеханических систем.
- Используйте соответствующие методы управления при исследовании, анализе и проектировании электромеханических систем.
| Код академического плана (с осени 2019 г.) | Академический план | Кампус | 2017-18 | 2018-19 | 2019-20 | 2020-2021 | 2021-2022 |
|---|---|---|---|---|---|---|---|
| ЭМЕТ | Электромеханическая инженерная техника (BS) | Алтуна | 228 | 209 | — | 1 | 1 |
| ЭМЕТ | Электромеханическая инженерная техника (BS) | Беркс | 148 | 142 | — | — | 1 |
| ЭМЕТ | Электромеханическая инженерная техника (BS) | Фейет | 1 | 14 | 17 | 30 | 43 |
| ЭМЕТ | Электромеханическая инженерная техника (BS) | Новый Кенсингтон | 49 | 54 | 52 | 53 | 47 |
| ЭМЕТ | Электромеханическая инженерная техника (BS) | Йорк | 41 | 44 | 40 | 42 | 40 |
| ЭМЕТ | Электромеханическая инженерная техника (BS) | Другое* | 6 | 2 | 0 | 1 | 1 |
| ЭМЕТАЛЛ** | Электромеханическая инженерная техника (BS) | Алтуна | — | — | 175 | 160 | 128 |
| ЭМЕТАЛЛ** | Электромеханическая инженерная техника (BS) | Другое* | 0 | 0 | 4 | 2 | 3 |
| ЭМЕТБК*** | Электромеханическая инженерная техника (BS) | Беркс | — | — | 141 | 120 | 111 |
| ЭМЕТБК*** | Электромеханическая инженерная техника (BS) | Другое* | 0 | 0 | 1 | 1 | 2 |
| Код академического плана (с осени 2019 г. 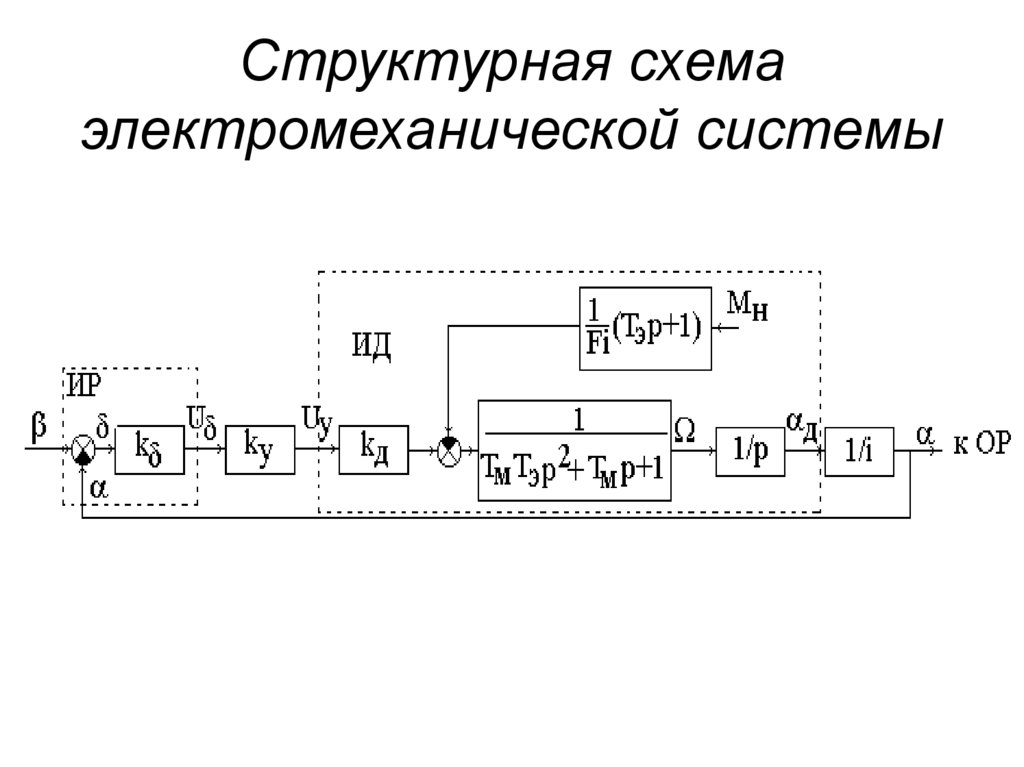 ) ) | Академический план | Кампус | 2017-18 | 2018-19 | 2019-20 | 2020-21 |
|---|---|---|---|---|---|---|
| ЭМЕТ | Электромеханическая инженерная техника (BS) | Алтуна | 53 | 71 | 55 | 56 |
| ЭМЕТ | Электромеханическая инженерная техника (BS) | Фейет | — | — | — | |
| ЭМЕТ | Электромеханическая инженерная техника (BS) | Беркс | 35 | 42 | 25 | 37 |
| ЭМЕТ | Электромеханическая инженерная техника (BS) | Новый Кенсингтон | 6 | 7 | 7 | 14 |
| ЭМЕТ | Электромеханическая инженерная техника (BS) | Йорк | 12 | 7 | 11 | 5 |
| ЭМЕТ | Электромеханический инженер | Другое* | 0 | 0 | 0 | |
| ЭМТАЛ | Электромеханический инженер | Алтуна | — | — | 41 | 49 |
| ЭМТАЛ | Электромеханический инженер | Другое* | 0 | 0 | 0 | 1 |
| ЭМТБК | Электромеханический инженер | Беркс | — | — | 43 | 33 |
| ЭМТБК | Электромеханический инженер | Другое* | 0 | 0 | 0 |
**EMTAL — это EMET в Penn State Altoona
***EMTBK — это EMET в Penn State Berks
Контактная информация
Penn State Altoona
Jordan Bittner
JLS5991@psu. edu
edu
814-949-5304
Penn State Berks
Terry Speicher
44 TLS2001010101011111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111ELTE
.
Анджей Гапински
[email protected]
724-430-4239
Penn State New Kensington
Joseph Cuiffi
[email protected]
724-334-6730
Penn State York
Harley H. Hartman
[email protected]
717-771-4097
Электромеханические системы | SENER — Аэрокосмическая промышленность
SENER начал свою космическую одиссею с разработки конструктивных механизмов и деталей. Сегодня она является ключевым поставщиком электромеханических компонентов и систем для Европейского космического агентства (ЕКА), а также основным поставщиком стреловых инструментов и развертываемых стрел.
Компания имеет более чем полувековой опыт проектирования, производства, испытаний и окончательной интеграции электромеханических компонентов и систем, имеющих решающее значение в космических миссиях, со 100% надежностью, как и за всю свою космическую историю. проектов, ни в одной из более чем 275 единиц оборудования, поставленных SENER для космических программ, никогда не было зафиксировано никаких неисправностей.
проектов, ни в одной из более чем 275 единиц оборудования, поставленных SENER для космических программ, никогда не было зафиксировано никаких неисправностей.
SENER предлагает несколько типов электромеханических компонентов и систем:
Поворотные приводы и линейные приводы
Опыт работы как с поворотными приводами, так и с линейными приводами и их компонентами, выполнение задач по проектированию и строительству в индивидуальном порядке и в соответствии с потребностями клиента, как в виде отдельных блоков, так и в составе устройств с более сложные функции
Низкопрофильный механизм наведения антенны (APM)
Механизм Cardan был разработан для наведения антенн Ka-диапазона и других устройств, его низкопрофильная конструкция оптимизирует размер антенны и радиочастотные свойства. Конструкция позволяет избежать необходимости использования механизмов удержания и разблокировки, сводя к минимуму вес системы. .. [+]
.. [+]
SENER SUM Шаговые двигатели
С 2015 года SENER Aeroespacial стала ведущим мировым экспертом в области разработки и производства двигателей для аэрокосмической промышленности. SENER вертикально интегрировала этот потенциал в свой портфель, инвестируя ресурсы компании в свою программу R+D+i… [+]
Системы развертывания
Опыт работы с различными типами систем развертывания, моторизованными и немоторизованными, с различными конфигурациями развертывания, стрелами, решетчатыми конструкциями, плоскими конструкциями для инструментов, солнцезащитными козырьками, космическими тросами, защитными кожухами и т. д.
СОК. Выдвижная стрела магнитометра. (МАГБУМ)
Цель этой штанги магнитометра для JUICE (программа Jupiter Icy Moon Explorer) состоит в том, чтобы разместить некоторые инструменты, необходимые для научных экспериментов, вдали от магнитных возмущений космического корабля. Стрела представляет собой конструкцию, состоящую из… [+]
Стрела представляет собой конструкцию, состоящую из… [+]
ДТР-ДМ. Механизм развертывания развертываемого теплового излучателя
DTR-DM был разработан для панели радиатора Iberespacio для Loral, где было проведено большинство квалификационных испытаний. Более того, в рамках программы h3020 PEGASUS по разработке панели радиатора для европейских коммерческих спутников проект … [+]
СОЛНЕЧНАЯ ОРБИТРА. Инструментальная стрела
Функция развертываемой стрелы Solar Orbiter заключается в поддержке и развертывании четырех инструментов, которые из-за их чувствительности к магнитным полям должны быть размещены вдали от электромагнитных помех, создаваемых спутником. Состоит из трех стан… [+]
PDM — линейка продуктов механизма раскрытия панели
Механизмы развертывания панелей, разработанные SENER Aeroespacial, используются в функционировании пространственных конструкций, таких как тепловые излучатели, антенные панели и любых других операциях одиночного развертывания, требующих высокого крутящего момента из-за таких элементов, как . .. [+]
.. [+]
БЕПИКОЛОМБО. Выдвижная стрела магнитометра (MAGBOOM)
SENER отвечает за стрелу магнитометра (MAGBOOM), которая представляет собой развертываемую стрелу с двумя магнитометрами, которые будут измерять магнитное поле Меркурия. BepiColombo — первая европейская миссия к Меркурию. Его запуск запланирован на 2018 год в путешеств… [+]
Системы наведения и сканирования
Системы наведения различной точности, диапазона и применения. Различные конфигурации, количество и конфигурация осей, параллельные устройства для наведения и сканирования.
ЕВКЛИД. Механизм развертывания и наведения антенны с высоким коэффициентом усиления (HGA ADPM)
SENER разрабатывает механизм развертывания и наведения антенны с высоким коэффициентом усиления (HGA ADPM) для научного космического зонда Euclid. Это прецизионный узел, состоящий из трех осей, одна для развертывания антенны, а две другие для наведения. Сборка… [+]
Это прецизионный узел, состоящий из трех осей, одна для развертывания антенны, а две другие для наведения. Сборка… [+]
Механизм развертывания и наведения антенны XTAR & SPAINSAT
Компания SENER разработала десять механизмов развертывания и позиционирования антенн для спутников связи XTAR и SPAINSAT. SENER отвечал за детальное проектирование, изготовление, интеграцию и тестирование механизмов (все важные действия для… [+]
Устройства для оптического приборостроения
Устройства с их оптико-электронными системами управления, системами перефокусировки, светофильтрами, высокоточными сканирующими устройствами, затворными и калибровочными системами, а также оптическими стендами.
СТРАЖ-3. Подсистема перевернутого зеркала.
Миссия Sentinel-3, созданная в рамках программы Copernicus Европейского Союза и ЕКА, имеет одной из своих основных целей мониторинг температуры моря и поверхности земли с высокой точностью и надежностью. Первый спутник Sentinel-3 был запущен в феврале 2016 года, затем последовали… [+]
Первый спутник Sentinel-3 был запущен в феврале 2016 года, затем последовали… [+]
ЕВКЛИД. Механизм перефокусировки вторичного зеркала (M2M)
M2MM представляет собой механизм позиционирования с 5 степенями свободы, который позволяет перемещать и регулировать вторичное зеркало (M2M) телескопа EUCLID, чтобы гарантировать оптическое качество, требуемое на орбите, необходимое для устранения смещения телескопа… [+]
Электронное оборудование управления
SENER имеет большой опыт в области электронных систем управления и имеет обширный портфель рекомендаций, в которых он работал для проектов различных космических агентств.
ЛИЗА Следопыт. Блок управления данными
Лазерная интерферометрическая космическая антенна (LISA) — это совместная миссия ЕКА и НАСА по обнаружению и наблюдению гравитационных волн в космосе и, таким образом, проверке общей теории относительности Эйнштейна. Основными технологиями LISA являются гравитационные эталонные датчики,… [+]
Основными технологиями LISA являются гравитационные эталонные датчики,… [+]
ГЕЯ. M2MM Электроника привода механизма (MDE)
GAIA M2M MDE — это электрическое устройство, предназначенное для управления до десяти шаговых двигателей в каждой секции MDE (основной или резервной), по одному, которые будут перемещать зеркала M2 для GAIA. Механизмы позволят M2M перемещаться по 5 степеням свободы. Доктор медицины… [+]
ГЕЯ. Электроника привода солнцезащитного козырька (SDE)
Электронный блок привода солнцезащитного козырька (SDE) – это электрический блок, предназначенный для управления шаговыми двигателями каждой секции (основной или резервной), которые должны приводиться в действие в структуре развертываемого солнцезащитного козырька (DSA) GAIA. Во время квалификационного сбора… [+]
Геликонные плазменные двигатели (HPT)
Helicon Plasma Thrusters (HPT) электрическая двигательная установка. Плазменные двигатели Helicon (HPT) — это электрические космические двигательные установки, основанные на генерации радиочастотной плазмы. Полученная плазма затем разгоняется с помощью магнитного п… [+]
Плазменные двигатели Helicon (HPT) — это электрические космические двигательные установки, основанные на генерации радиочастотной плазмы. Полученная плазма затем разгоняется с помощью магнитного п… [+]
МТГ. Электронный блок сканирования (SCAE)
Основная функция электронного блока сканирования MTG (Meteosat Third Generation) (SCAE) заключается в обеспечении управляемого высокоточного сканирования и движения зеркала главного телескопа. Для этого в электронике предусмотрены следующие функции… [+]
Устройства для космического применения
Системы, включающие Устройства, электронное управление и другие функции, такие как антенны, роботизированные элементы, автономные соединения, системы орбитальной стыковки, шасси и компоненты пилотируемых программ, такие как люки, системы поддержки экипажа и конструкции.
ГЕЯ. Складной солнцезащитный козырек
Устройство GAIA Deployment Sunshield Assembly (DSA) обеспечивает стабильную и непрерывную теневую среду для SVM и PLM спутника. DSA состоит из 12 прямоугольных лепестков, соединенных 12 треугольными секторами, образуя почти круглую плоскость вокруг… [+]
DSA состоит из 12 прямоугольных лепестков, соединенных 12 треугольными секторами, образуя почти круглую плоскость вокруг… [+]
Механизм высвобождения пуповины для миссии ExoMars 2022
Установление того, существовала ли когда-либо жизнь на Марсе или все еще активна, является одним из главных нерешенных научных вопросов нашего времени; Это также необходимая предпосылка для подготовки к будущим исследованиям человека. Для достижения этой важно… [+]
Миссия e.Deorbit, фаза B1
После десятилетий запусков Земля окружена ореолом космического мусора из более чем 17 000 отслеживаемых объектов, которые угрожают рабочим миссиям возможным столкновением. Единственный способ контролировать количество мусора на ключевых низких орбитах — удалить… [+]
Сверлильные механизмы Exomars
Обнаружение того, была ли когда-либо жизнь на Марсе, является одной из самых важных научных задач нашего времени. Это также необходимая предпосылка для подготовки к будущим исследовательским миссиям человека.
Для достижения этой важной цели… [+]
Это также необходимая предпосылка для подготовки к будущим исследовательским миссиям человека.
Для достижения этой важной цели… [+]
Система жесткого захвата IBDM
Международный механизм причаливания и стыковки (IBDM) — это европейская андрогинная система стыковки с малой ударной нагрузкой, которая способна стыковать и пришвартовывать большие и малые космические корабли. SENER Aeroespacial в составе европейского консорциума разрабатывает… [+]
СОЛНЕЧНАЯ ОРБИТРА. Подсистема FDM (проходы, двери и механизмы, электронный блок)
Эта подсистема состоит из нескольких сквозных фильтров (расположенных на тепловом экране), обеспечивающих негерметичное защитное покрытие спутника для его средств дистанционного обнаружения. Некоторые из этих проходов (6) нуждаются в дверной крышке для предохрани. .. [+]
.. [+]
Стандартный интерфейс для управления роботами (SIROM)
Стандартный интерфейс для роботизированного манипулирования (SIROM) полезными нагрузками в будущих космических миссиях. SIROM ICD для OG5 и OG7 Descargar SIROM является одним из ключевых «строительных блоков», разработанных для Европейского Союза в рамках проекта PERASPERA… [+]
Удерживайте и отпустите
Оборудование с различной грузоподъемностью, передачами и разблокирующими механизмами. Выдвижные или стационарные устройства, спусковые механизмы как с пиротехническими, так и с непиротехническими технологиями.
Механизм удержания и освобождения SAOCOM-CS (HRM) и механизм развертывания (DEM)
В 2013 году CONAE (Comisión Nacional de Actividades Espaciales, Аргентина) предложила ЕКА запустить малый спутник вместе с SAOCOM-1B.