Система курсовой стабилизации — описание и принцип работы
В большинстве стран, система курсовой стабилизации ESP стала обязательным компонентом пассажирских автомобилей. Исходя из этого, можно говорить, что ESP является важной частью систем обеспечивающих безопасность на дороге. Давайте посмотрим, чем хороша система динамической стабилизации и вкратце разберем, как она работает.
Оглавление:
Зачем это нужно?
Для ответа на вопрос, зачем нужна динамическая стабилизация, давайте сначала выясним, каким образом автомобиль уходит в занос.
Поворот это довольно опасный участок дороги, на котором могут произойти всякие неприятности. Особенно если это закрытый поворот, и вы не видите, кто движется вам на встречу. Но сейчас речь не о том.
Зачем нужна машине курсовая устойчивость
Для успешного прохождения поворота вы, в качестве водителя, немного снижаете скорость, поворачиваете руль и машина начинает движение в соответствии с углом на который вы повернули рулевое колесо.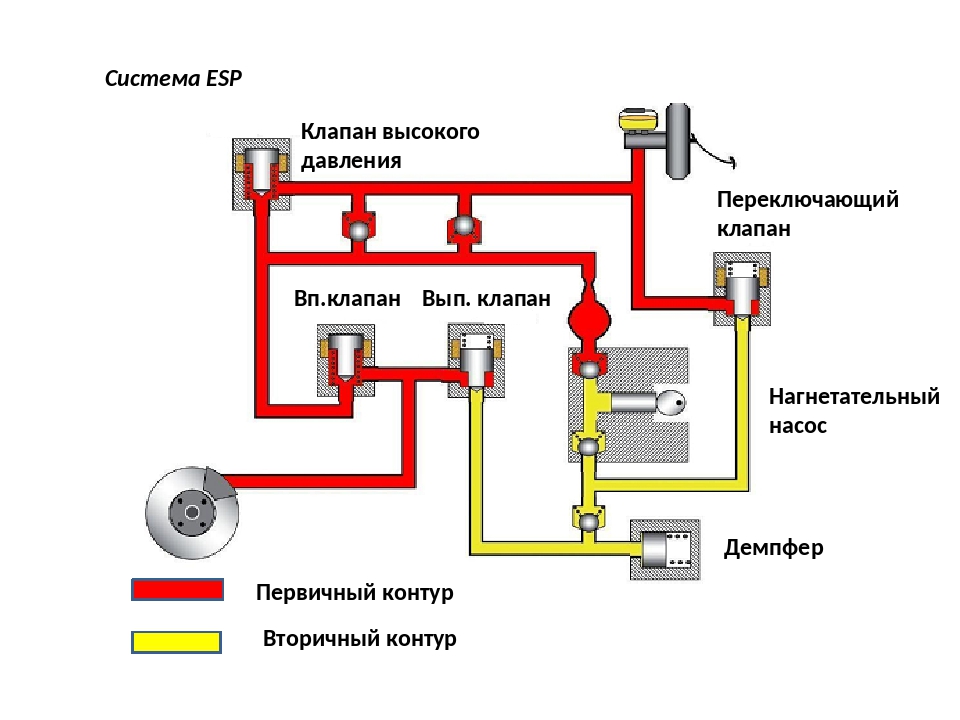
Пока что всё идёт нормально. Но что случится, если вы не снизите скорость? Или более того, увеличите её при входе в поворот.
При движении по кривой, на автомобиль действует, кроме прочих, центробежная сила. И в тот момент, когда эта сила станет больше чем все остальные силы, в том числе сила трения колес с дорогой, автомобиль начинает заносить.
Немного простой физики: центробежная сила это сила, которая действует от центра окружности, наружу (Очень приблизительная формулировка, так как суть статьи не в этом).
Так вот, система курсовой устойчивости ESP создана для того что бы ни допустить ситуации, когда ваша машина уходит в занос, а значит становится практически не управляемой, что может привести к самым тяжёлым последствиям.
Как это работает?
Принцип работы системы динамической стабилизации ESP основан на постоянном наблюдении за информацией, получаемой с датчиков скорости, разнице между углом отклонения автомобиля и поворотом руля, а также прочих показателях.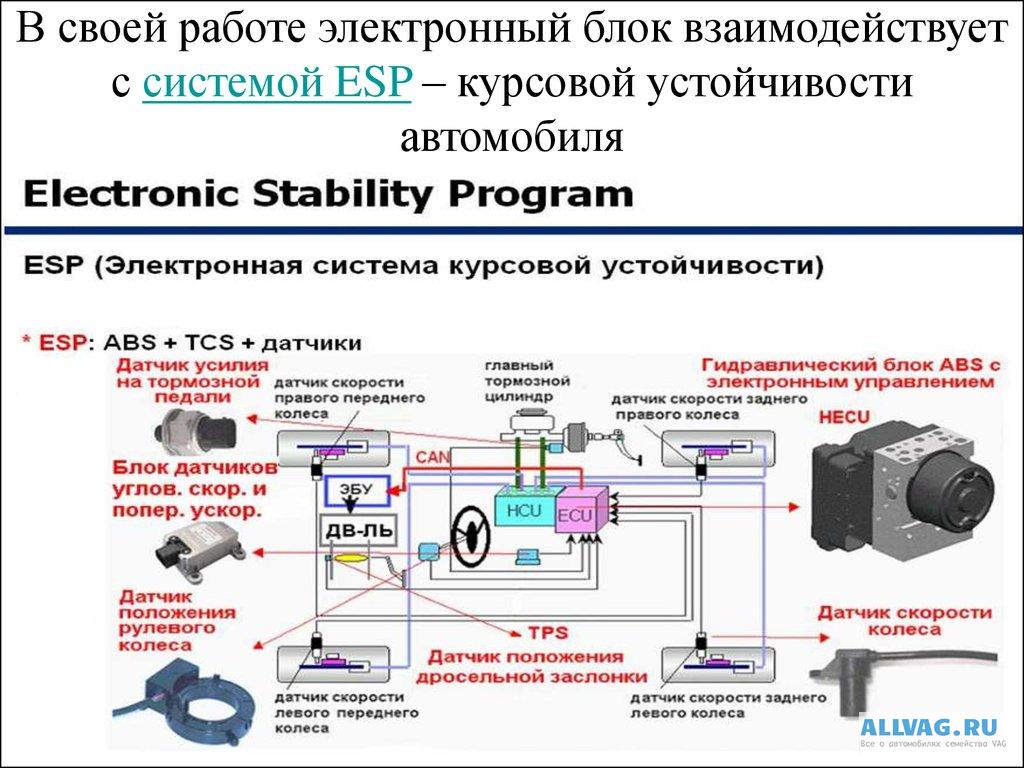
Динамическая стабилизация ESP работает вместе с антиблокировочной системой ABS, о которой мы рассказывали ранее. ESP использует датчики скорости, которыми пользуется АБС, а также, возможности системы торможения для быстрой реакции на изменяющуюся обстановку.
Основной причиной вымешивания системы курсовой устойчивости ESP в управление автомобилем, является разница между углом поворота руля и углом отклонения машины. Этот показатель, говорит о том, произошёл занос или нет.
Как же динамическая стабилизация исправляет ситуацию? Это происходит путём уменьшения скорости вращения определённых колёс, в зависимости от того как и в какую сторону заносит ваш автомобиль. Кроме того уменьшается общая скорость транспортного средства. Таким образом, машина возвращается к первоначальной траектории движения и все остаются целыми, невредимыми и с уравновешенной нервной системой.
Кроме того уменьшается общая скорость транспортного средства. Таким образом, машина возвращается к первоначальной траектории движения и все остаются целыми, невредимыми и с уравновешенной нервной системой.
Чаще всего водитель даже не замечает того что его машина должна была сорваться в занос, потому как система курсовой устойчивости ESP очень быстро реагирует на ситуацию. Считывание информации со всех датчиков происходит 50 раз в секунду, так что реакция на изменение действительно очень быстрая.
Названий много – суть одна
Траектория движения машины с ESP и без
Основной и самый значительный производитель аппаратуры для курсовой стабилизации — компания Bosch, и как раз их продукт называется ESC – electronic stability control. Но в нашем мире не бывает бесконкурентного производства, и потому существует ещё несколько компаний производящих такое же оборудование, но под другими названиями.
Так же и автопроизводители различных марок машин устанавливают эти механизмы, давая им разные названия. Ниже мы предоставим вам таблицу, кратко сопоставляющую автомобили и названия, установленных в них систем курсовой стабилизации.
Ниже мы предоставим вам таблицу, кратко сопоставляющую автомобили и названия, установленных в них систем курсовой стабилизации.
У всех них один и тот же принцип работы, и таблица поможет вам не путаться в обилии слов означающих одно и то же.
| Имя системы курсовой устойчивости | Марки автомобилей |
|---|---|
| ESP | Audi, Bentley, Bugatti, Chery, Chrysler, Citroen, Dodge, Diamler, Fiat, Holden, Hyundai, Jeep, Kia, Seat, Skoda, Mercedes Benz, Opel, Peugeot, Proton, Renault, Saab, Scania, Smart, Suzuki, Vauxhall, Volkswagen |
| ASC, ASTC | Mitsubishi, BMW |
| ESC | Chevrolet, Hyundai, Kia Skoda, Lada |
| VDC | Alfa Romeo, Fiat, Subaru, Nissan |
| VSA | Acura, Hyundai, Honda |
| MSP | Maserati |
| CST | Ferrari |
| DSTC | Volvo |
| PSM | Porsche |
| VDIM, VSC | Toyota, Lexus |
| RSC | Ford |
| DSC | BMW, Jaguar, Land Rover, Mazda, Mini, Ford – только для австралийского рынка |
Это относительно краткий перечень, на самом деле разновидностей названий систем обеспечивающих курсовую устойчивость, гораздо больше. Но в главном они пересекаются — это работа для того что бы избежать критических ситуаций и сохранить безопасность водителя и пассажиров в неприкосновенности.
Но в главном они пересекаются — это работа для того что бы избежать критических ситуаций и сохранить безопасность водителя и пассажиров в неприкосновенности.
Бойся опытного водителя
В обычных режимах вождения, ESP работает постоянно, не имеет значения, на какой скорости и, по какой дороге вы едите.
Отключение ESP может привести к неуправляемому заносу
Однако для любителей дорожного экстрима существует кнопка отключения стабилизации вашей машины. Правда, такую функцию производители добавляют не во всех моделях. Например, в машинах бизнес класса, чаще всего динамическая стабилизация не отключается.
Смысл отключения курсовой устойчивости в том, что опытный водитель может, для собственного удовольствия, создать контролируемый занос авто или при выходе из поворота дать газу, что приведёт к небольшому заносу задних колёс.
При включённой системе курсовой устойчивости, сделать такое не представляется возможным, так как электроника пресечёт эти попытки на самой первоначальной стадии.
Но все мы люди и все могут ошибаться, и потому отключая курсовую устойчивость, вы берёте на себя всю ответственность за риск. Причём это не только риск для вас, но и опасность для других участников движения.
Опубликовано: Июль 2, 2014
Система курсовой устойчивости ESP как способ избежать заноса
Система курсовой стабилизации автомобиля в движении имеет 20-летнюю историю развития, в течение которой она получила всеобщее признание, и применяется в настоящее время практически на всех моделях современных автомашин. Она предназначена для автоматической корректировки курсового положения автомобиля в условиях заноса.
ESP стабилизирует положение автомобиля в условиях заноса
Каждый производитель автомобильной техники систему курсовой устойчивости на своих моделях называл по-разному. Поэтому она имеет много разных сокращённых наименований, способных ввести в заблуждение неискушённых автолюбителей. Первые автоматы курсовой стабилизации немецких автомобилей Mercedes Benz и BMW получили название Elektronisches Stabilitatsprogramm.
ESP и его синонимы
Аббревиатура этого наименования ESP получила самое большое распространение и применяется практически на всех моделях европейских и американских производителей авто. На других моделях можно встретить такие сокращения и названия системы курсовой устойчивости:
- на моделях Hyundai, Kia, Honda её принято называть Electronic Stability Control ESC;
- на моделях Rover, Jaguar, BMW устанавливается динамический стабилизатор управления Dynamic Stability Control – DSC;
- на Volvo она носит название Dynamic Stability Traction Control – DTSC;
- на японских марках Acura и Honda она получила название Vehicle Stability Assist – VSA;
- на «Тойотах» применяется наименование Vehicle Stability Control — VSC;
- такое же оборудование под именем Vehicle Dynamic Control (VDC) используется на авто марки Subaru, Nissan и Infiniti.
Несмотря на большое количество имён, всё это оборудование используется для достижения одной цели – помочь водителю справиться с управлением на скользкой, мокрой или покрытой гравием дороге, где маневрирование автомашины приводит к заносам и потере курса.
Система курсовой устойчивости глазами экспертов
Основная цель этой системы состоит в предотвращении срыва автомобиля в занос и бокового скольжения за счёт изменения передаваемого момента вращения на одно из колёс ведущей пары.При этом происходит предотвращение дальнейшего развития начавшегося заноса и стабилизируется положение машины на траектории перемещения во время выполняемого манёвра на скользкой дороге. В отдельных технических источниках она называется противозаносной системой, потому что такая ESP в автомобиле устраняет заносы и обеспечивает этим устойчивость удержания курса.
Эта картинка хорошо иллюстрирует работу системы ESP, которая удерживает автомобиль в крутом повороте
Действенность использования оборудования автоматической курсовой стабилизации подтверждается научными изысканиями, проведёнными экспертами американского института IIHS. По результатам проведённых исследований было выявлено, что использование ESP в автомашинах, попавших в дорожное происшествие, сократило смертность ДТП от 43 до 56%. Случаи переворачивания авто со смертельным исходом снизились на 77-80%. Автомобиль, оборудованный ESC, имеет значительно меньшую вероятность опрокидывания по сравнению с необорудованным автомобилем.
Данные германских страховых компаний свидетельствуют о том, что 35-40% всех смертельных ДТП могли бы быть предотвращены либо иметь более благоприятный исход, если бы на авто их участников была установлена система курсовой устойчивости. По мнению экспертов, данное оборудование однозначно оказывает помощь автолюбителю в экстремальных ситуациях. Оно во многих случаях является палочкой-выручалочкой малоопытных автолюбителей.
Устройство и работа оборудования ESP
Современное оборудование контроля курсовой стабильности работает в комплексе с системой антиблокировки колёс ABS, заодно используя её механизмы. Единый комплекс этих двух систем работает согласованно, выполняя одновременно несколько процедур по обеспечению безопасного движения автомобиля. Структура системы курсовой устойчивости состоит из:
- управляющего блока, представляющего собой контроллер, непрерывно сканирующий состояние различных сигнализаторов и считывающий их сигналы;
- датчики АБС, определяющие скорость вращения колёс;
- датчики разворота рулевого колеса;
- датчики давления в цилиндрах тормозов;
- G-сенсор, прибор чувствительный к боковой скорости и ускорению автомобиля и фиксирующий появление скольжения в боковом направлении.

Таким образом, на входах контроллера постоянно имеется информация о скорости движения, об угле разворота руля, оборотах двигателя, давления в цилиндрах тормоза, об угловой скорости поперечного скольжения и её градиенте. Информация с датчиков непрерывно сравнивается с расчётными данными, запрограммированными в контроллере. При наличии отклонений контроллер вырабатывает корректирующие управляющие сигналы, поступающие на исполнительные механизмы тормозных цилиндров, подтормаживающие соответствующие колёса для возвращения траектории движения автомобиля к расчётной кривой.
Выбор подтормаживающих колёс и степень их торможения определяется системой автоматически и индивидуально, в зависимости от возникающей ситуации. Для автоматического торможения колёс применяется гидравлический модулятор ABS, который создаёт дополнительное давление в тормозных цилиндрах. В то же время в систему подачи топлива на двигатель поступает опережающий сигнал, уменьшающий поступление горючей смеси. В результате одновременно с торможением осуществляется уменьшение вращающего момента, подаваемого на колесо.
В результате одновременно с торможением осуществляется уменьшение вращающего момента, подаваемого на колесо.
Примеры и особенности работы системы ESP
Чтобы наглядно представить, что такое ESP в автомобиле, обратите внимание на рисунки.
На этой иллюстрации все прекрасно видно и понятно
На данной картинке показаны линии вероятного движения автомобиля при превышении максимально допустимой скорости вхождения в крутой вираж на трассе. При повороте руля начинается занос машины. На левом рисунке красным пунктиром показана линия движения автомобиля без ESC при торможении водителем (машину разворачивает поперёк с выездом на встречную полосу). На правом рисунке красным пунктиром обозначена траектория движения без торможения, когда машину выносит в кювет. Зелёной линией и факелами на обеих картинках обозначены траектория движения автомобиля, оборудованного системой ESC, и колёса, которые автоматически подтормаживаются системой при появлении заноса.
Благодаря выборочному торможению системы ESP происходит стабилизация направления движения автомобиля
Система контроля срабатывает и действует в любых ситуациях, будь то разгон, накат или торможение. Алгоритм работы схемы контроля определяется возникающей ситуацией и системой привода колёс. Например, если при повороте машины влево срабатывает датчик заноса заднего моста, то ESC сокращает подачу топлива в двигатель и замедляет скорость. Если данная мера не устраняет занос, то происходит частичное торможение переднего правого колеса. За этой операцией следует дальнейшее действие по установленной программе, пока не будет устранено возникшее боковое скольжение задних колёс.
В ESP предусмотрена возможность регулирования трансмиссии в автомобилях с электронным управлением АКПП. В таких автомобилях происходит автоматическое переключение на низшую передачу при появлении скольжения по аналогии с зимним способом вождения. Опытные водители, которые привыкли ездить на предельных скоростях и возможностях, отмечают, что система стабилизации курса мешает водить автомашину в таком режиме.
Система стабилизации машины ESP. Принципы управления
Такие ситуации могут возникать в определённые моменты, когда требуется увеличить тягу двигателя, а система контроля наоборот уменьшает её, устраняя скольжение автомобиля. Для таких случаев конструкторы устанавливают выключатели, с помощью которых можно принудительно отключить контрольную систему и осуществлять полностью ручное управление автомашиной.
Оборудование автоматической стабилизации курса входит в бортовой комплекс активной безопасности машины. Основное достоинство системы в том, что оборудованный ею автомобиль становится более послушным и нетребовательным к квалификации водителя. От него требуется только поворачивать руль, а система уже дальше самостоятельно выполняет все необходимые действия для правильного выполнения манёвра.
Однако всегда нужно помнить, что эта система также имеет пределы своих возможностей. При слишком большой скорости или слишком маленьком радиусе поворота даже самая совершенная система контроля устойчивости не сможет спасти машину от неконтролируемого заноса и переворота
Как работает система курсовой устойчивости: нужна ли, как отключить
Здравствуйте, дорогие читатели! Занимаясь изучением вопроса безопасности на машинах, решил с вами обсудить то, как работает система курсовой устойчивости.
На самом деле частично мы затрагивали вопрос работы ESP, но этот материал отлично дополнит предыдущую статью. Здесь мы отдельно посмотрим на то, нужна ли подобная система, что будет, если она не работает и как отключить по мере необходимости.
ESP, как одно из самых популярных обозначений системы, имеющей много аналогов, применяется повсеместно. Ее можно без проблем встретить на машинах с механикой и с автоматом, на авто на заднем, полном и на переднем приводе. Даже на мотоцикле она предусмотрена часто.
Давайте рассмотрим несколько ключевых вопросов.
Как еще может называться
Скажу сразу, что от названия суть никак не поменяется.
Дело все в том, что автокомпании стремятся зачастую выделиться, подчеркнуть значимость и превосходство именно своей системы. Из-за этого внедряются другие названия. Хотя чаще всего мы видим именно значение ESP.
Полный же список названий может выглядеть так:
- ESP;
- ESC;
- VSC;
- VSA;
- DSC;
- DSTC;
- PMS и пр.

Обычно даже значок приборной панели у всех одинаковый. Это графика скользкой дороги, либо же просто аббревиатура ESP. Лампочка загорается при срабатывании системы.
Если вы знаете еще какие-то аббревиатуры, напишите в комментариях. Нам очень интересно почитать ваши отзывы.
Если не согласны с тем, что все системы курсовой устойчивости фактически идентичные, жду ваших аргументов.
О чем важно знать
Первопроходцем в плане автомобильных систем безопасности считается ABS. С ее помощью достигается максимальная эффективность торможения, не позволяя колесам заблокироваться.
Чуть позже автопроизводители начали внедрять системы, которые автоматически контролируют тягу и обеспечивают стабилизацию транспортного средства. Если говорить про Россию и Таможенный союз, то с января 2016 года на территории стран ТС, включая РФ, не разрешается сертифицировать для продажи транспортные средства, в которых с завода в базовой комплектации не предусмотрено наличие антиблокировочной системы. Той самой ABS. И это абсолютно верное решение.
Той самой ABS. И это абсолютно верное решение.
Что касается противобуксовочной системы, то она носит различные названия, в зависимости от конкретного автомобиля. Чаще всего можно встретить значения ASR и TCS. Но возможны и другие варианты.
Суть у антибукса одна. Она заключается в том, чтобы не позволить машине активно буксовать. Хотя параллельно иногда пробуксовка становится необходимостью.
Допустим, вы попали в глубокий снег или песок. Чтобы выбраться из этой ловушки, требуется активное вращение колес.
Если антипробуксовка будет включена, тогда даже неглубокий снег окажется непреодолимым препятствием для автомобиля. В особенности это касается машин с задним приводом. Пытаясь выехать из ловушки, водитель постоянно видит перед собой мигающую лампу ограничения тяги. Колеса, являющиеся ведущими, вращаются, но делают это короткими рывками, буквально на ¼ оборота каждые полсекунды. Поверьте, подобным образом выбраться из снега или песка не получится.
Чтобы повысить эффективность работы антипробуксовки, на машинах начали внедрять электронную систему стабилизации, то есть ESP.
Эта система имеет более серьезные полномочия и активно вмешивается в процесс движения и управления транспортным средством.
Коротко про ESP
Поведение автомобиля во многом зависит от привода и подвески. Последняя может быть зависимой и независимой, а также полузависимой. Какая из них лучше, мы уже обсуждали.
В составе подвески имеется ряд решений и конструкций, включая поперечный стабилизатор. Но этого недостаточно, чтобы обеспечить безопасную езду.
ESP создана для того, чтобы отслеживать и корректировать поперечную динамику транспорта, оказывать непосредственную помощь водителю. Основной задачей является недопущение срыва авто в заносы и предотвращение боковых скольжений. То есть машина с помощью электроники сохраняет свою курсовую устойчивость, придерживается заданной траектории движения при поворотах и на участках дороги с плохим покрытием. Из-за этого ESP имеет несколько отечественных расшифровок, характеризующих ее работу.
В частности, ее могут называть системой для поддержания курса, либо же противозаносным помощником.
Взаимодействия с другой электроникой, ESP не просто контролирует и меняет крутящий момент на ведущей оси, но и может отдельно затормозить отдельные колеса, чтобы уверенно войти в поворот, к примеру.
Чтобы система могла выполнять такие функции, в ее состав входят специальные датчики. Они следят за поперечным и продольным ускорением, контролируют скорость, с которой вращаются колеса авто относительно вертикальной оси.
Как отключить
Не берусь утверждать, что везде система отключается идентичным образом.
Чаще всего это просто кнопка, на которую нужно нажать. Хотя есть примеры, как тот же Хендай Крета, где при первом нажатии на ESP Off водитель отключает лишь антипробуксовку, а при втором нажатии и удержание выключает ESP полностью.
Есть примеры авто, когда выключается лишь антибукс. У других выполняется частичная деактивация. При высоких скоростях электроника все равно участвует в движении ради вашей безопасности.
На разных авто отключение реализовано своим образом. Загляните лучше в инструкции к своим машинам, таким как:
Загляните лучше в инструкции к своим машинам, таким как:
- Лада Веста;
- Лада Гранта;
- Ниссан Кашкай;
- Тойота Королла;
- Митсубиси Лансер;
- Опель Астра;
- Рено Дастер;
- Мазда 6;
- Ниссан Альмера;
- Ауди А3 и пр.
Вне зависимости от машины, полного отключения навсегда не происходит. Чаще всего автоматическая активация осуществляется в момент запуска зажигания, либо когда автомобиль достигает определенной скорости. На видео можете посмотреть, как на практике работает ESP.
Для чего систему отключают
Особых причин отключать ESP на самом деле нет. Это вариант для тех, кто хочет подрифтить и пустить машину в занос, как учили на курсах экстремального вождения.
Но если вы просто едете по обычной дороге, ESP лучше всегда держать активной. Как и систему помощи старта в гору.
Что действительно бывает полезным, так это выключение противобуксовки. Актуально, если вы попали в снежную или песчаную ловушку, либо пытаетесь выбраться из грязи.
Всем спасибо за ваше внимание! Подписывайтесь, оставляйте комментарии, задавайте вопросы и рассказывайте о нашем проекте своим знакомым!
как работает система стабилизации у разных автопроизводителей
Система ESP – важная составляющая активной безопасности машины. Ее оснащаются все модели, однако это одна из немногих массовых функций, которую каждый производитель интерпретирует и реализовывает по своему. Почему так происходит попыталась разобраться Motormania.
Начнем с того, что название ESP — закреплено за всеми автомобилями. Ибо автопроизводители дают разные имя этому помощнику. Однако аббревиатура ESP уже сильно закрепилась, и зачастую систему стабилизации так и называют: в прессе, быту и т.п. Но суть дела не в этом. А в самой сущности этой системы. Она родилась в середине 1990-х годов, и за двадцать с лишним лет предотвратила тысячи ДТП: вылеты с дороги, развороты и столкновения с другим транспортом вследствие потери управления и т. п. Иными словами, ESP внесла в обеспечение безопасности большую лепту, чем в сое время пресловутая ABS. Не помощник, а самый настоящий ангел-хранитель, который готов оказать помощь в любую минуту. И когда ровно два года назад ее сделали обязательной на всех машинах, реализуемых в Старом Свете, никто даже и не заикнулся против.
п. Иными словами, ESP внесла в обеспечение безопасности большую лепту, чем в сое время пресловутая ABS. Не помощник, а самый настоящий ангел-хранитель, который готов оказать помощь в любую минуту. И когда ровно два года назад ее сделали обязательной на всех машинах, реализуемых в Старом Свете, никто даже и не заикнулся против.
Другое дело, что ни сами производители автоиндустрии, ни автофанаты никак не могут договориться, как систему настраивать. Одни настаивают, что она должна работать постоянно и в любых ситуациях. Вторые предпочитают иметь возможность ее отключить и предлагают делегировать право выбора водителю. Третьи хотели бы, чтобы отключалась не система в целом, а только одна ее составляющая — контроль тяги (например, когда нужно выехать из снега). Четвертые же полагают, что отключенный ESP должен автоматически «просыпаться», когда драйвер нажимает педаль тормоза или когда крен либо рысканье превысят определенный предел, поскольку это явные симптомы потери контроля над автомобилем. Спор продолжается непрерывно. И победителей в нем быть не может, ведь у каждого свое обоснованное мнение.
Спор продолжается непрерывно. И победителей в нем быть не может, ведь у каждого свое обоснованное мнение.
Например, итальянцы из Alfa Romeo предложили два варианта стратегии управления системой. Режим Race с полным отключением электроники — которая, впрочем, автоматически включается, если срабатывает АБС — предусмотрен только для одной машины — заряженного седана Alfa Romeo Giulia Quadrifoglio. В случае же с другими автомобилями Alfa Romeo дело обстоит наоборот — ESP нельзя выключить. Там все упирается в режим Dynamic, который максимум что делает, так это повышает порог срабатывания и допускает небольшую пробуксовку задних колес. Полностью электронный хамут он не сбрасывает.
Система стабилизации представляет собой развитие ABS. Два дополнительных датчика — один отслеживает угол поворота рулевого колеса, другой регистрирует значение поперечного ускорения и угол рыскания, то есть вращения автомобиля вокруг воображаемой вертикальной оси — помогают определить, следует ли автомобиль траектории, заданной водителем, уходит ли в занос или в снос. В случае заноса ESP ограничивает мощность двигателя и дает антиблокировочной системе команду притормозить внешнее переднее колесо, а возникающая при этом сила создает момент, который стабилизирует машину. При сносе система действует по той же схеме, но в этом случае подтормаживается внутреннее заднее колесо.
В случае заноса ESP ограничивает мощность двигателя и дает антиблокировочной системе команду притормозить внешнее переднее колесо, а возникающая при этом сила создает момент, который стабилизирует машину. При сносе система действует по той же схеме, но в этом случае подтормаживается внутреннее заднее колесо.У немецких автопроизводителей более свободное или, другими словами, более осторожное виденье ситуации -водитель волен в своем выборе полностью. У BMW, к примеру, полностью отключить электронику можно не только на горячих машинах М-версии (чего, собственно, и следовало ожидать), но даже на семейном минивэне BMW 2 Series, который сложно представить мчащимся по гоночному треку. Единственное исключение баварцы сделали для электромобиля i3. В общем, автопроизводители, предпочитающие оставить конечный выбор за водителем, пусть со всякими оговорками, составляют абсолютное большинство. Дело доходит до курьезов.
У Volvo, к примеру, всегда есть клавиша (или же функция борт-компьютера), которая именуется как ESC OFF. По названию можно подумать, что она отключается систему стабилизации. Но нет — она лишь отодвигает порог ее вмешательства. То есть система стабилизации вовсе «не дремлет» и готова одернуть машину, если в повороте та начнет скользить. Выбор вполне логичный, хотя чтобы разобраться, как именно устроена функция ESC OFF, придется залезть в книжку по эксплуатации.
По названию можно подумать, что она отключается систему стабилизации. Но нет — она лишь отодвигает порог ее вмешательства. То есть система стабилизации вовсе «не дремлет» и готова одернуть машину, если в повороте та начнет скользить. Выбор вполне логичный, хотя чтобы разобраться, как именно устроена функция ESC OFF, придется залезть в книжку по эксплуатации.
Как бы то ни было, в поведении автопроизводителей проглядывает определенная осторожность, они осознают, что лучше не идти на поводу у горячих петролхедов, иначе можно иметь проблемы с законом. Именно поэтому руководства по эксплуатации пестрят предупреждениями об опасностях, которые несет в себе частичное или полное отключение ESP: все компании стараются дать клиентам максимум информации и избежать ненужных упреков и обвинений, которые могут быть чреваты негативными последствиями.
В принципе, инстинкт самосохранения и здравый смысл должны подсказать, что отказываться от системы стабилизации не стоит -уж очень важный ассистент. Тем более, если не нарушать правила, ESP может сработать разве что на скользкой поверхности либо или в непредвиденных обстоятельствах.
Тем более, если не нарушать правила, ESP может сработать разве что на скользкой поверхности либо или в непредвиденных обстоятельствах.
Отключать систему стабилизации долгим нажатием кнопки ESP/ESC (если такая возможность предусмотрена, а предусмотрена почти у всех машин) позволительно только на специально оборудованных гоночных треках, где рисковать относительно безопасно. Только и исключительно на гоночной трассе можно пробовать, насколько работа ESP в целом и изменение порога ее срабатывания в частности, влияют на поведение машины. В первую очередь, как она изменяет тягу и скорость входа в повороты.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Система динамической стабилизации | Автомобильный справочник
Система динамической стабилизации предназначена для контроля поперечной динамики автомобиля и предотвращение срыва автомобиля в занос и боковое скольжение посредством компьютерного управления моментами силы колес. Иногда эту систему называют «противозаносной» или «системой поддержания курсовой устойчивости». Она способна компенсировать ошибки водителя, нейтрализуя и исключая занос, когда контроль над автомобилем уже потерян.
Иногда эту систему называют «противозаносной» или «системой поддержания курсовой устойчивости». Она способна компенсировать ошибки водителя, нейтрализуя и исключая занос, когда контроль над автомобилем уже потерян.
Содержание
Функции системы динамической стабилизации
Причиной большого числа ДТП является человеческий фактор. Даже при обычных условиях движения водитель и автомобиль могут достигнуть своих физических пределов вследствие, к примеру, неожиданного поворота дороги, внезапно появившегося препятствия или непредвиденного изменения состояния дорожного покрытия. Увеличение скорости также может привести к потере водителем уверенного контроля над автомобилем, если силы поперечного ускорения, воздействующие на автомобиль, в такой ситуации достигнут уровня, требующего от водителя слишком больших усилий.
При резком изменении сцепления шин с дорогой автомобиль внезапно начинает вести себя не так, как ожидает водитель, исходя из своего опыта.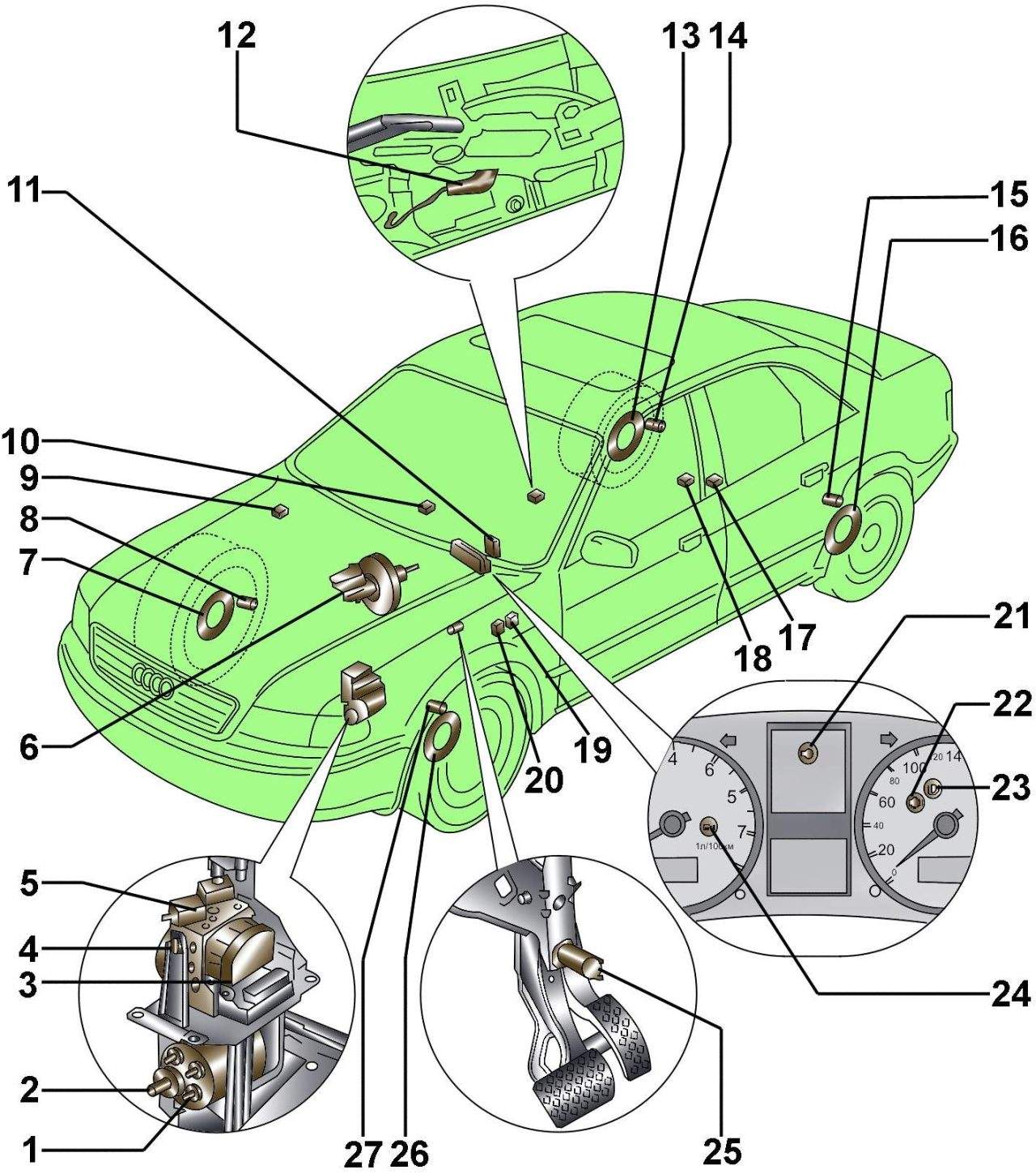 В таких экстремальных ситуациях водитель зачастую уже не способен самостоятельно стабилизировать автомобиль; как правило, в состоянии паники он своими действиями лишь усугубляет потерю устойчивости. В результате образуется значительное расхождение между продольным движением автомобиля и его продольной осью (угол дрейфа β). Даже путем поворота рулевого колеса в противоположном направлении обычный водитель сможет самостоятельно восстановить устойчивость лишь при угле дрейфа не более 8°.
В таких экстремальных ситуациях водитель зачастую уже не способен самостоятельно стабилизировать автомобиль; как правило, в состоянии паники он своими действиями лишь усугубляет потерю устойчивости. В результате образуется значительное расхождение между продольным движением автомобиля и его продольной осью (угол дрейфа β). Даже путем поворота рулевого колеса в противоположном направлении обычный водитель сможет самостоятельно восстановить устойчивость лишь при угле дрейфа не более 8°.
Система динамической стабилизации (ESP) — именно под этим названием компания Bosch вывела на рынок свою систему управления динамикой движения — вносит значительный вклад в преодоление таких ситуаций, помогая водителю сохранить управляемость автомобиля в физических рабочих пределах. Датчики постоянно фиксируют поведение и водителя, и автомобиля. Путем сравнения фактического состояния с заданным, подходящим к той или иной ситуации, в случае значительных расхождений система вмешивается в работу тормозной системы и силового агрегата для стабилизации автомобиля (рис. «Боковая динамическая реакция легкового автомобиля с ESP» ).
«Боковая динамическая реакция легкового автомобиля с ESP» ).
Встроенная функциональность антиблокировочной системы (ABS) предотвращает блокирование колес при нажатии на тормоз, в то время как аналогично интегрируемая система управления тяговым усилием (TCS) предотвращает пробуксовывание колес при трогании с места и разгоне. ESP — это комплексная система, охватывающая возможности, выходящие далеко за рамки ABS и комбинации ABS и TCS. Эта система предотвращает отклонение автомобиля от курса с заносом задней оси (избыточная поворачиваемость) или передней оси (недостаточная поворачиваемость), автомобиль слушается руля в рамках физически возможного.
Система ESP базируется на испытанных и зарекомендовавших себя компонентах систем ABS и TCS. Таким образом, можно активно тормозить воздействуя на отдельные колеса с высоким уровнем динамической реакции. На крутящий момент двигателя и, соответственно, тягу и пробуксовывание колес можно повлиять с помощью системы управления двигателем. Эти системы сообщаются между собой, к примеру, по шине CAN.
Требования к системе динамической стабилизации
Система динамической стабилизации (ESP) помогает повысить безопасность дорожного движения. Она улучшает поведение автомобиля на дороге в рамках физически возможного. Реакция автомобиля остается предсказуемой для водителя, и автомобиль становится более управляемым в критических ситуациях.
В рамках физических возможностей автомобиля курсовая устойчивость автомобиля улучшается во всех состояниях — при полном и частичном торможении, движении накатом, разгоне, обгоне и изменениях нагрузки, а также, к примеру, в случае экстремальных маневров (при панической реакции). Значительно снижается риск заноса.
В ряде ситуаций эффективность торможения достигается путем использования тяговых характеристик при вмешательстве ABS и TCS, и когда активировано управление тяговым крутящим моментом двигателя (автоматическое увеличение оборотов двигателя для подавления избыточного тормозного момента двигателя). Это приводит к сокращению тормозного пути и увеличению тяги, улучшению устойчивости и повышению уровня чувствительности рулевого управления.
Это приводит к сокращению тормозного пути и увеличению тяги, улучшению устойчивости и повышению уровня чувствительности рулевого управления.
Некорректные вмешательства систем могут сказаться на безопасности. Комплексная концепция безопасности обеспечивает своевременное обнаружение всех неисправностей, которых не удается избежать, и система ESP полностью или частично отключается в зависимости от типа неисправности.
Многочисленные исследования показали, что ESP значительно снижает количество ДТП, вызванных заносом, и уровень смертности в ДТП. Как следствие, оснащение автомобилей системой ESP стало обязательным в США и Канаде с сентября 2011 года. В Евросоюзе (ЕС), все новые легковые автомобили и легкие грузовики должны оснащаться системой ESP с ноября 2011 года (неотъемлемая часть ECE-R 13Н). Для остальных новых автомобилей установлен переходный период до конца 2014 года. В других регионах, например, в Японии и Австралии, также будут вводиться такие требования.
Принцип действия системы динамической стабилизации
Система динамической стабилизации (ESP) использует тормозную систему автомобиля и силовой агрегат для коррекции продольного и поперечного движения автомобиля в критических ситуациях. Когда подключается система динамической стабилизации, она смещает приоритеты управления тормозной системой. Основная функция колесных тормозов-замедление и/или остановка автомобиля — становится вторичной по важности, поскольку происходит вмешательство ESP для сохранения курсовой устойчивости автомобиля. ESP может также ускорять приводные колеса путем вмешательства в работу двигателя, повышая устойчивость.
Когда подключается система динамической стабилизации, она смещает приоритеты управления тормозной системой. Основная функция колесных тормозов-замедление и/или остановка автомобиля — становится вторичной по важности, поскольку происходит вмешательство ESP для сохранения курсовой устойчивости автомобиля. ESP может также ускорять приводные колеса путем вмешательства в работу двигателя, повышая устойчивость.
Оба механизма воздействуют на движение автомобиля. При движении по окружности в устойчивом состоянии существует определенная связь между усилиями на рулевом колесе и результирующим поперечным ускорением автомобиля и, соответственно, силами на шинах в поперечном направлении (эффект подруливания). Силы, воздействующие на шину в продольном и поперечном направлениях, зависят от пробуксовки шины. Это означает, что на движение автомобиля можно повлиять через скольжение шин. Торможение отдельных колес, например, заднего колеса на внутреннем радиусе поворота в случае недостаточной поворачиваемости или переднего колеса на внешнем радиусе поворота в случае избыточной поворачиваемости помогает как можно более точно выдержать заданную траекторию движения автомобиля.
Типичный маневр автомобиля
Чтобы сравнить, как автомобиль будет вести себя в экстремальной ситуации с ESP и без ESP, рассмотрим следующий пример. Маневр движения отражает текущую ситуацию и базируется на программах моделирования, разработанных на основе результатов испытаний. Результаты были подтверждены последующими дорожными испытаниями.
Быстрое маневрирование и выруливание
На рис. «Курсовая устойчивость во время последовательного прохождения правого/левого поворота» изображена реакция автомобиля без ESP и автомобиля с ESP при прохождении серии S-образных участков с быстрым маневрированием и выруливанием на дороге с высоким коэффициентом сцепления шин с дорогой (μ = 1), без притормаживания и на исходной скорости 144 км/ч. На рис. «Кривые динамической реакции при последовательном прохождении поворотов» изображены кривые параметров динамической реакции. В начале, при приближении к S-образному участку, условия для обоих автомобилей и их реакции идентичны. Затем водители начинают маневрировать (фаза 1).
В начале, при приближении к S-образному участку, условия для обоих автомобилей и их реакции идентичны. Затем водители начинают маневрировать (фаза 1).
Автомобиль без ESP
Как видно из рисунка, после начальной фазы резкое маневрирование у автомобиля без ESP уже угрожает потерей управляемости (рис. а, «Курсовая устойчивость во время прохождения поворотов» фаза 2). В то время как вращение руля быстро создало значительные поперечные силы на передних колесах, имеет место определенная задержка создания аналогичных сил на задних колесах. Автомобиль реагирует вращением по часовой стрелке вокруг своей вертикальной оси. Он лишь реагирует на попытки водителя вырулить (фаза 3), так как уже потерял управляемость. Резко возрастают скорость рыскания и угол бокового увода, и автомобиль срывается в занос (фаза 4).
Автомобиль с ESP
Автомобиль с ESP стабилизируется после первоначального маневрирования путем активного торможения переднего левого колеса для устранения угрозы потери устойчивости (рис. b, «Курсовая устойчивость во время прохождения поворотов» фаза 2): это происходит без вмешательства водителя. Это действие ограничивает занос внутрь, уменьшая скорость рыскания и стабилизируя угол разворота при движении по инерции. После изменения направления поворота, свое направление сначала меняет момент, и затем — скорость вращения вокруг вертикальной оси (между фазами 3 и 4). В фазе 4, второе короткое нажатие на тормоз, на этот раз правого переднего колеса — полностью восстанавливает устойчивость. Автомобиль продолжает двигаться по траектории, заданной водителем.
b, «Курсовая устойчивость во время прохождения поворотов» фаза 2): это происходит без вмешательства водителя. Это действие ограничивает занос внутрь, уменьшая скорость рыскания и стабилизируя угол разворота при движении по инерции. После изменения направления поворота, свое направление сначала меняет момент, и затем — скорость вращения вокруг вертикальной оси (между фазами 3 и 4). В фазе 4, второе короткое нажатие на тормоз, на этот раз правого переднего колеса — полностью восстанавливает устойчивость. Автомобиль продолжает двигаться по траектории, заданной водителем.
Структура системы динамической стабилизации
Цель системы управления динамикой
Контроль характеристик управляемости в пределах физически возможного направлен на то, чтобы сохранить три степени свободы автомобиля в плоскости дороги — линейную скорость vx, поперечную скорость vy и скорость ψ вращения вокруг вертикальной оси — в контролируемых пределах. Задуманный водителем маневр преобразуется в динамическую реакцию автомобиля, адаптируемую к характеристикам дороги в рамках процесса оптимизации, нацеленного на обеспечение максимальной безопасности.
Задуманный водителем маневр преобразуется в динамическую реакцию автомобиля, адаптируемую к характеристикам дороги в рамках процесса оптимизации, нацеленного на обеспечение максимальной безопасности.
Структура системы и управления
Система ESP состоит из автомобиля как управляемой системы, датчиков, определяющих вводные переменные, исполнительных органов для коррекции тормозных, движущих и поперечных сил, а также иерархически структурированных контроллеров — контроллера поперечной динамики (высший уровень) и контроллеров колес (низший уровень) (рис. «ESP — общая система управления» ). Контроллер высшего уровня определяет заданные значения для контроллеров низшего уровня в виде моментов или скольжения или их изменений. Внутренние системные переменные, не измеряемые напрямую, такие как угол дрейфа β определяются при оценке условий движения.
Чтобы определить номинальное поведение, анализируются сигналы, соответствущие командам водителя. Оцениваются сигналы от датчика положения рулевого колеса, датчика давления в тормозной системе (желаемое замедление, получаемое из тормозного давления, измеренного в гидравлическом блоке) и положения педали акселератора (желаемый крутящий момент двигателя). При вычислении номинального поведения также учитывается используемый потенциал коэффициента сцепления шин с дорогой и скорость автомобиля. Эти параметры оцениваются на основе сигналов, получаемых от датчиков частоты вращения колес, датчика поперечного ускорения, датчика скорости вращения вокруг вертикальной оси и датчика давления в тормозной системе. Затем вычисляется момент относительно вертикальной оси, который необходим для приближенного приведения параметров действительного состояния к параметрам требуемого состояния.
Оцениваются сигналы от датчика положения рулевого колеса, датчика давления в тормозной системе (желаемое замедление, получаемое из тормозного давления, измеренного в гидравлическом блоке) и положения педали акселератора (желаемый крутящий момент двигателя). При вычислении номинального поведения также учитывается используемый потенциал коэффициента сцепления шин с дорогой и скорость автомобиля. Эти параметры оцениваются на основе сигналов, получаемых от датчиков частоты вращения колес, датчика поперечного ускорения, датчика скорости вращения вокруг вертикальной оси и датчика давления в тормозной системе. Затем вычисляется момент относительно вертикальной оси, который необходим для приближенного приведения параметров действительного состояния к параметрам требуемого состояния.
В целях получения требуемого момента рыскания необходимо, чтобы изменения в величинах тормозного момента и относительного скольжения колес определялись посредством контроллера ESP. Эти величины затем устанавливаются контроллерами низшего уровня — контроллерами относительного скольжения и тягового усилия с помощью исполнительного механизма гидравлической тормозной системы и привода управления работой двигателя.
Оценка состояния движения
Для определения стабилизирующих вмешательств важно не только знать сигналы от датчиков угловых скоростей колес vwhl, давление на впуске рAdm, скорость вращения вокруг вертикальной оси поперечное ускорение ψ, угол поворота рулевого колеса δ и крутящий момент двигателя, но и ряд других внутренних системных переменных, которые могут быть измерены косвенно. К ним, к примеру, относятся силы, действующие на шины в продольном, поперечном и нормальном направлениях (Fx, Fy и Fn), линейная скорость vx, значения относительного скольжения шин λi, угол бокового увода колес а на одной оси, угол дрейфа β поперечная скорость автомобиля vy и коэффициент сцепления μ. Они определяются по сигналам датчиков на базе вычислительных моделей.
Линейная скорость автомобиля vx имеет ключевую важность для всех контроллеров бокового увода колес и поэтому должна вычисляться с очень большой точностью. Это делается на основе автомобильной модели с использованием измеренных угловых скоростей колес. Здесь необходимо учитывать влияние многочисленных факторов. Скорость автомобиля vx уже в нормальных ситуациях вследствие торможения или пробуксовки отличается от линейных скоростей вращательного движения колес vwhl. У полноприводных автомобилей, в частности, необходимо учитывать особенности привода колес. На поворотах колеса, движущиеся по внутреннему радиусу, проходят по траектории, отличной от траектории колес на внешнем радиусе, следовательно, их скорости разные.
Это делается на основе автомобильной модели с использованием измеренных угловых скоростей колес. Здесь необходимо учитывать влияние многочисленных факторов. Скорость автомобиля vx уже в нормальных ситуациях вследствие торможения или пробуксовки отличается от линейных скоростей вращательного движения колес vwhl. У полноприводных автомобилей, в частности, необходимо учитывать особенности привода колес. На поворотах колеса, движущиеся по внутреннему радиусу, проходят по траектории, отличной от траектории колес на внешнем радиусе, следовательно, их скорости разные.
Управляемость автомобиля меняется при обычной эксплуатации в ответ на изменения нагрузки, сопротивления движению (например, уклон дороги или изменение типа покрытия, ветер) или износ (например, тормозных колодок).
При всех этих граничных условиях линейная скорость автомобиля должна оцениваться с отклонением в несколько процентов для обеспечения стабилизирующего вмешательства в необходимой степени.
Контроллер поперечной динамики
Задачей контроллера поперечной динамики является вычисление фактического поведения автомобиля на основании, например, сигнала скорости вращения вокруг вертикальной оси и угла дрейфа, и сделать поведение автомобиля в экстремальной по динамике ситуации как можно более близким к поведению в обычной ситуации (номинальное поведение).
Связь, существующая при движении по окружности в устойчивом состоянии между скоростью вращения вокруг вертикальной оси и углом поворота рулевого колеса δ, линейной скоростью автомобиля vx и характеристическими переменными, используется для определения номинального поведения. Применяя одноколейную модель, получаем:
ψ = (vx / l) δ (1/ 1+(vx/vch)2)
в качестве базы для расчета номинального движения автомобиля. В этой формуле l означает расстояние между передней и задней осями. Геометрические и физические параметры модели автомобиля обобщены в «характеристической скорости автомобиля» vch.
Геометрические и физические параметры модели автомобиля обобщены в «характеристической скорости автомобиля» vch.
В этом случае переменная ψ ограничивается соответственно текущим коэффициентам скольжения и конкретными свойствами динамики автомобиля и ситуации движения (инициируемые водителем торможение или разгон) и такими условиями, как наличие уклона или различие в коэффициентах скольжения (μ-разделение). Таким образом, команда водителя известна как номинальная скорость вращения вокруг вертикальной оси ψNom.
Контроллер поперечной динамики сравнивает измеренную скорость вращения вокруг вертикальной оси с номинальной и в случае значительных отклонений вычисляет момент вращения вокруг вертикальной оси, необходимый для совпадения переменной величины фактического состояния с номинальным значением. На более высоком уровне контролируется угол дрейфа β и по мере роста значений все в большей степени учитывается в расчете стабилизирующего момента вращения вокруг вертикальной оси ΔMZ. Эта выходная переменная контроллера применяется посредством входных переменных тормозного момента и проскальзывания отдельных колес, корректируемых контроллерами нижнего уровня.
Эта выходная переменная контроллера применяется посредством входных переменных тормозного момента и проскальзывания отдельных колес, корректируемых контроллерами нижнего уровня.
Стабилизирующие вмешательства выполняются на всех колесах, торможение которых генерирует момент вращения вокруг вертикальной оси в требуемом направлении вращения, и на которых еще не достигнут предел передаваемых сил. У автомобиля с избыточной поворачиваемостью физический предел сначала превышается на задней оси. Поэтому стабилизирующие вмешательства выполняются на переднем мосту. У автомобиля с недостаточной поворачиваемостью ситуация обратная.
Номинальные значения относительного скольжения λ’Nom, запрашиваемые контроллером поперечной динамики, на отдельных колесах устанавливаются с помощью контроллеров колес, т.е. контроллеров низшего уровня (см. рис. «ESP — общая система управления» ). Различают следующие три случая.
Управление колесами при движении накатом
Чтобы создавать как можно более точные величины момента вращения вокруг вертикальной оси, необходимые для стабилизации автомобиля, силы на колесах должны изменяться при определенных условиях путем контроля проскальзывания колес.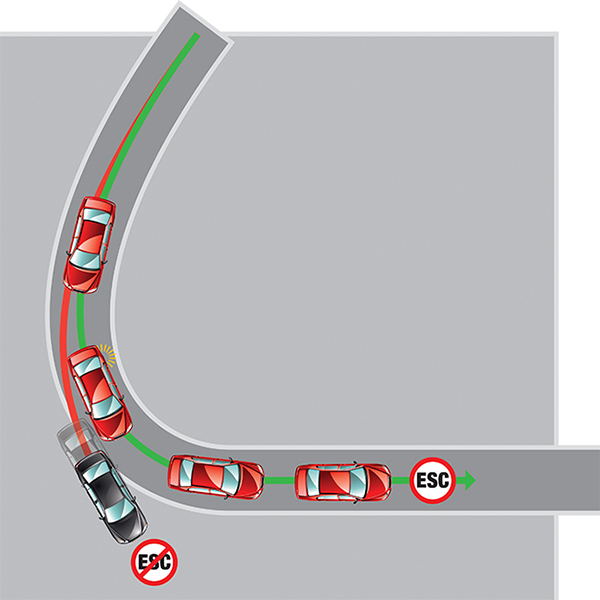 Номинальная величина проскальзывания, запрашиваемая контроллером поперечной динамики на том или ином колесе в случае отсутствия торможения регулируется контроллером проскальзывания путем активного нагнетания давления. Для этого нужно как можно более точно знать величину текущего проскальзывания колеса. Оно вычисляется на основе сигнала измеренной скорости колеса и линейной скорости автомобиля vx. Номинальный тормозной момент на колесе образуется из отклонения фактической величины проскальзывания от номинальной с использованием PID- регулирования (пропорционально-интегральнодифференциального регулирования).
Номинальная величина проскальзывания, запрашиваемая контроллером поперечной динамики на том или ином колесе в случае отсутствия торможения регулируется контроллером проскальзывания путем активного нагнетания давления. Для этого нужно как можно более точно знать величину текущего проскальзывания колеса. Оно вычисляется на основе сигнала измеренной скорости колеса и линейной скорости автомобиля vx. Номинальный тормозной момент на колесе образуется из отклонения фактической величины проскальзывания от номинальной с использованием PID- регулирования (пропорционально-интегральнодифференциального регулирования).
Колесо может подвергаться торможению не только в случае активного нагнетания давления контроллером поперечной динамики. После переключения на пониженную передачу и резком отпускании педали газа инерция движущихся деталей двигателя в определенной степени тормозит приводные колеса. При увеличении этой силы и соответствующего реактивного момента сверх определенного уровня шины теряют способность передавать результирующие нагрузки на дорогу и у них появляется тенденция к блокированию (например, из-за внезапного наезда на скользкий участок дороги).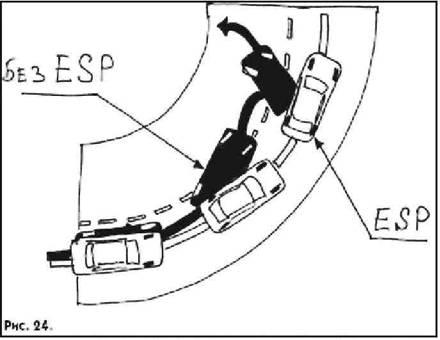 Тормозное проскальзывание приводных колес можно ограничить в случае движения накатом посредством регулировки тормозного момента двигателя. Водителем это воспринимается как «плавный разгон».
Тормозное проскальзывание приводных колес можно ограничить в случае движения накатом посредством регулировки тормозного момента двигателя. Водителем это воспринимается как «плавный разгон».
Управление колесами при торможении
При торможении на отдельных колесах выполняются различные операции, в зависимости от ситуации:
- Вмешательство водителя через нажатие педали тормоза и вращение рулевого колеса;
- Эффект контроллера ABS, предотвращающего блокировку отдельных колес;
- Вмешательства контроллера поперечной динамики, обеспечивающие устойчивость автомобиля за счет подтормаживания отдельных колес, при необходимости.
Эти три требования должны координироваться таким образом, чтобы инициируемые водителем торможение и маневрирование реализовывались как можно полнее. Если управление колесами выполняется главным образом с целью максимального замедления автомобиля, то его можно выполнять на основании ускорения колес, надежно определеяемого по минимальной информации датчиков (управление неустойчивостью). Для регулировки продольных и поперечных сил на шине для стабилизации автомобиля необходимо применять принцип управления проскальзывания, так как он также позволяет управлять колесами в нестабильном диапазоне характеристики коэффициента сцепления / проскальзывания. Однако на основании имеющихся сигналов датчиков должна определяться абсолютная величина проскальзывания колеса до нескольких процентов, в зависимости от скорости автомобиля.
Для регулировки продольных и поперечных сил на шине для стабилизации автомобиля необходимо применять принцип управления проскальзывания, так как он также позволяет управлять колесами в нестабильном диапазоне характеристики коэффициента сцепления / проскальзывания. Однако на основании имеющихся сигналов датчиков должна определяться абсолютная величина проскальзывания колеса до нескольких процентов, в зависимости от скорости автомобиля.
Контроллер ABS
Задача контроллера ABS — обеспечить устойчивость и управляемость автомобиля в любых дорожных условиях и использование сцепления между шинами и дорогой в как можно большей степени. Будучи контроллером нижнего уровня по отношению к контроллеру поперечной динамики, он выполняет эти функции путем модулирования тормозного давления на колесе таким образом, чтобы обеспечивалась максимально возможная продольная сила при сохранении достаточной поперечной устойчивости. Однако в ESP измеряется больше переменных, чем в ABS, имеющей только датчики угловых скоростей колес. Таким образом, информация о движении колеса, такая как скорость вращения вокруг вертикальной оси или поперечное ускорение, получается путем прямого измерения с большей точностью, чем при модельной оценке на основании нескольких измеренных значений.
Таким образом, информация о движении колеса, такая как скорость вращения вокруг вертикальной оси или поперечное ускорение, получается путем прямого измерения с большей точностью, чем при модельной оценке на основании нескольких измеренных значений.
В определенных ситуациях можно повысить эффективность системы путем адаптации управления ABS посредством использования переменных из контроллера поперечной динамики. Когда автомобиль тормозит на неровной дороге (μ -разделение), на левых и правых колесах возникают очень разные тормозные силы. В результате возникает момент вращения вокруг вертикальной оси, на который водитель должен реагировать выруливанием, чтобы стабилизировать автомобиль. Скорость нарастания этого момента и быстрота последующей реакции водителя зависят от момента инерции автомобиля вокруг вертикальной оси. ABS вызывает задержку увеличения момента вращения вокруг вертикальной оси, сдерживая рост давления в колесном цилиндре переднего колеса с более высоким коэффициентом сцепления с дорожным покрытием. Эта функция ABS может также использовать информацию контроллера высшего уровня — контроллера поперечной динамики (по реакции водителя и поведению автомобиля) и, соответственно, даже еще лучше реагировать на фактическое движение автомобиля.
Если при торможении в повороте автомобиль при определенных условиях начинает поворачиваться, то тенденции к избыточной поворачиваемости можно противодействовать путем электронного распределения тормозных сил через уменьшение давления на отдельных колесах. Если этого недостаточно, то помогает контроллер поперечной динамики путем активного нагнетания давления на переднем колесе, движущемся по внешнему радиусу поворота (уменьшение поперечной силы). При недостаточной же поворачиваемости тормозной момент увеличивается на заднем колесе, движущемся по внутреннему радиусу поворота (при условии, что колесо не контролируется системой ABS) и слегка уменьшается на переднем внешнем колесе.
Если у автомобиля появляется тенденция к избыточной поворачиваемости при смене полосы с полным или частичным торможением, то уменьшается давление на заднем внешнем колесе (увеличение поперечной силы), и увеличивается давление на переднем внешнем колесе (уменьшение поперечной силы). При недостаточной поворачиваемости при торможении в повороте увеличивается тормозной момент в заднем колесе, движущемся по внутреннему радиусу поворота (при условии, что колесо еще не попало в диапазон вмешательства ABS) и слегка уменьшается на переднем внешнем колесе.
При недостаточной поворачиваемости при торможении в повороте увеличивается тормозной момент в заднем колесе, движущемся по внутреннему радиусу поворота (при условии, что колесо еще не попало в диапазон вмешательства ABS) и слегка уменьшается на переднем внешнем колесе.
Управление колесами при активном движении
Как только приводные колеса начинают проскальзывать при активном движении, активируется контроллер низшего уровня — контроллер тягового усилия (TCS). На измеренную скорость колеса и соответствующее проскальзывания можно повлиять путем изменения баланса крутящего момента на каждом приводном колесе. Контроллер TCS ограничивает крутящий момент на каждом колесе до величины, которая может быть передана на дорогу. Таким образом, команда водителя реализуется после разгона настолько, насколько зто физически возможно, и одновременно обеспечивается фундаментальная курсовая устойчивость, так как слишком сильно уменьшаются боковые силы на колесе.
У автомобиля с активной осью в качестве регулирующих переменных используются средняя скорость колеса приводной оси.
vMWhl = 1/2 (vlWhl + vRWhl)
и разность скоростей vDif = vlWhl — vRWhl между левым vlWhl и правым vRWhl колесами.
Структура контроллера TCS изображена на рис. «Структура контроллера TCS». Опорные переменные контроллера поперечной динамики включаются в расчет номинального значения средней скорости колеса и разности скоростей колес, а также номинальных значений относительного скольжения и скоростей колес при движении накатом. При расчете номинальных значений vDifNom (номинальной разности скоростей приводных колес на одной оси) и vWhlNom (номинальной средней скорости колес), вводные переменные для изменения номинального относительного скольжения ΔλNom и допустимая разность величин относительного скольжения ΔλDlfTolNom приводной оси или осей корректируют базовые значения, вычисленные блоком TCS.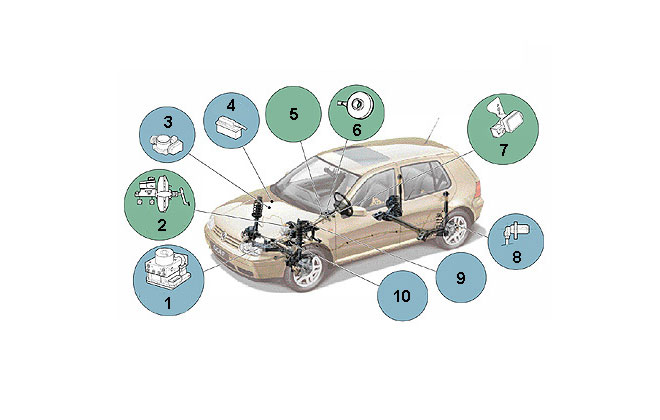 Кроме того, тенденция к недостаточной или избыточной поворачиваемости, выявляемая контроллером поперечной динамики, через приращение номинального крутящего момента двигателя ΔМRedNom напрямую влияет на определение максимально допустимого приводного момента.
Кроме того, тенденция к недостаточной или избыточной поворачиваемости, выявляемая контроллером поперечной динамики, через приращение номинального крутящего момента двигателя ΔМRedNom напрямую влияет на определение максимально допустимого приводного момента.
Динамическая реакция силового агрегата зависит от сильно изменяющихся режимов работы. Поэтому необходимо определить текущий режим работы (выбранная передача, включение сцепления), чтобы можно было адаптировать параметры контроллера к динамической реакции регулируемой системы и к не линейным характеристикам.
Поскольку на среднюю угловую скорость колеса влияют переменные инерционные силы, возникающие в приводе в целом (в двигателе, трансмиссии, на ведущих колесах, на карданном валу), то для описания её относительно медленной скорости динамической реакции используется относительно большая постоянная времени. Среднюю угловую скорость колеса контролирует нелинейный PID-контроллер, при этом, в частности, приращение l-компонента (в зависимости от режима работы) может варьироваться в широком спектре. В стационарном случае l-компонент является мерой крутящего момента, который может быть передан на колесо в точке контакта с поверхностью дороги. Выходной переменной этого контроллера является номинальный суммарный момент МMWhlNom.
В стационарном случае l-компонент является мерой крутящего момента, который может быть передан на колесо в точке контакта с поверхностью дороги. Выходной переменной этого контроллера является номинальный суммарный момент МMWhlNom.
И наоборот, постоянная времени для разности скоростей колес относительно мала и отражает тот факт, что собственные инерционные силы колес являются практически единственным определяющим фактором для динамической реакции. Кроме того, в отличие от средней скорости колес, двигатель влияет на неё лишь косвенно. Разность скоростей колес vDif контролируется нелинейным Pl-контроллером. Поскольку притормаживания приводного колеса вначале становятся заметными только через баланс крутящих моментов этого колеса, то они изменяют распределение межколесного дифференциала, имитируя его блокировку. Параметры этого контроллера блокировки межколесного дифференциала лишь в минимальной степени зависят от включенной передачи и влияний двигателя. Если дифференциальная скорость на приводной оси отличается от номинальной vDlfNom больше, чем это допустимо («мертвая зона»), то запускается вычисление номинального дифференциального момента MDlfNom. «Мертвая зона» расширяется, если тормозных вмешательств TCS необходимо избегать, например, при прохождении поворотов на пределах возможностей.
Если дифференциальная скорость на приводной оси отличается от номинальной vDlfNom больше, чем это допустимо («мертвая зона»), то запускается вычисление номинального дифференциального момента MDlfNom. «Мертвая зона» расширяется, если тормозных вмешательств TCS необходимо избегать, например, при прохождении поворотов на пределах возможностей.
Номинальные дифференциальные крутящие моменты
Номинальный суммарный и номинальный дифференциальный крутящие моменты являются основой для распределения позиционирующих сил между исполнительными механизмами. Номинальный дифференциальный момент MDlfNom задается разностью между крутящими моментами на левом и правом ведущих колесах путем активации соответствующего клапана в гидравлическом блоке (ассиметричное вмешательство тормозов). Номинальный суммарный момент МMWhlNom регулируется как вмешательствами двигателя, так и симметричным вмешательством тормозов.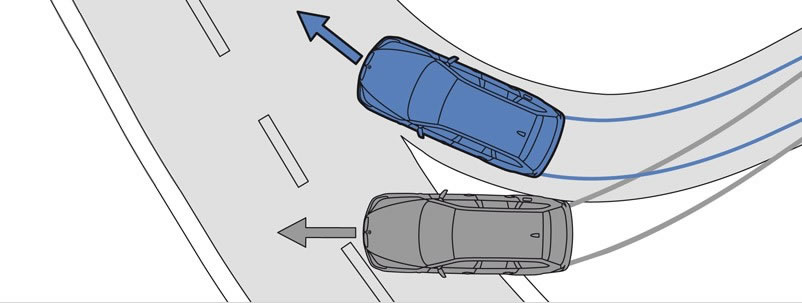
У бензинового двигателя регулировки, предпринимаемые через дроссельный клапан, относительно медленно дают эффект (задержка и переходная реакция двигателя). Для быстрого вмешательства через двигатель используются задержка момента зажигания и еще одна опция — селективное подавление импульсов впрыска. В дизельных двигателях электронный блок управления (EDC) уменьшает крутящий момент двигателя путем изменения количества впрыскиваемого топлива. Для краткосрочной помощи в уменьшении крутящего момента двигателя можно применять симметричное тормозное воздействие.
Во внедорожных условиях особую роль играет тяговое усилие. Обычно у внедорожников управление тяговым усилием автоматически адаптируется путем идентификации ситуации для достижения наилучших уровней эффективности и надежности. Другие автопроизводители дают водителю возможность выбрать различные регулировки, от деактивации ограничения крутящего момента двигателя до адаптации к особым состояниям дороги (лед, снег, трава, песок, снежная каша, каменистый грунт).
Дополнительные функции поперечной динамики
Описанные выше базовые функции ESP могут также включать в себя дополнительные функции поперечной динамики для особых категорий автомобилей, таких как полноприводные универсалы или внедорожники (SUV) и легкие фургоны, а также для особых требований к стабилизации автомобилей.
Расширенное управление недостаточной поворачиваемостью
Даже в нормальных условиях движения автомобиль может оказаться неспособным адекватно реагировать на вращение рулевого колеса (с образованием недостаточной поворачиваемости), если, к примеру, на повороте дорожное покрытие внезапно окажется мокрым или грязным. ESP может увеличить скорость вращения автомобиля вокруг вертикальной оси, создав дополнительный момент вращения. Это позволяет автомобилю пройти поворот с физически возможной максимальной скоростью. Ожидаемая частота вмешательств и требования к комфорту у разных типов автомобилей разные и поэтому имеются соответственно разные ступени расширения для выполнения таких тормозных вмешательств, которые влияют на поведение автомобиля при недостаточной поворачиваемости.
Если водитель захочет пройти поворот по меньшему радиусу, чем это физически возможно, то останется лишь уменьшение скорости автомобиля. Эту информацию можно считывать во время поворота в устойчивом состоянии по зависимости между радиусом поворота r, линейной скоростью автомобиля vx и скоростью вращения вокруг вертикальной оси ψ:
r = vx / ψ
Чтобы автомобиль оставался на заданной траектории, он — без применения момента вращения вокруг вертикальной оси — тормозится настолько, насколько это необходимо путем торможения всех колес (расширенное управление недостаточной поворачиваемостью, EUC).
Предотвращение опрокидывания
Легкие грузовики и другие автомобили с высоким центром тяжести, такие как внедорожники (SUV), могут перевернуться при возникновении больших поперечных сил, например, из-за резкого руления при маневрах уклонения от препятствия на сухой дороге (очень динамичные ситуации вождения) или при медленном увеличении поперечного ускорения автомобиля до критического при съезде с автострады с уменьшающимся радиусом поворота на слишком высокой скорости (почти стационарные ситуации вождения).
Существуют особые функции (функции подавления опрокидывания, RMF), выявляющие эти критические ситуации с помощью обычных датчиков ESP и стабилизирующих автомобиль путем вмешательства в работу тормозной системы и двигателя. Для обеспечения своевременного вмешательства, в дополнение к маневрирующим действиям водителя и измеренной реакции автомобиля (скорость вращения вокруг вертикальной оси и боковое ускорение), для оценки поведения автомобиля в ближайшем будущем используется прогнозирующая модель. В частности, при выявлении надвигающейся опасности опрокидывания притормаживаются два колеса на внешнем радиусе поворота. Это действие уменьшает поперечные силы на колесах и, соответственно, критическое поперечное ускорение. Управление колесами должно выполняться с таким высоким уровнем чувствительности, чтобы, несмотря на сильно колеблющиеся вертикальные силы FN, управляемость не ухудшалась из-за тенденции к блокированию отдельных колес, особенно при очень динамичных маневрах уклонения. Уменьшение скоростей колес при притормаживании отдельных колес также помогает водителю удержать автомобиль на своей полосе. В почти стационарных ситуациях движения точно выверенное уменьшение крутящего момента двигателя также не позволяет водителю спровоцировать критическую ситуацию.
Уменьшение скоростей колес при притормаживании отдельных колес также помогает водителю удержать автомобиль на своей полосе. В почти стационарных ситуациях движения точно выверенное уменьшение крутящего момента двигателя также не позволяет водителю спровоцировать критическую ситуацию.
Момент стабилизирующего вмешательства и его интенсивность должны быть как можно точнее адаптированы к текущему поведению автомобиля. Это поведение может значительно изменяться с нагрузкой, к примеру, в случае с легкими фургонами и внедорожниками с багажниками на крыше. Такие автомобили используют дополнительные оценочные алгоритмы, вычисляющие массу автомобиля и изменение центра тяжести, вызванное распределением нагрузки, если это требуется для адаптации функций ESP (управление с адаптацией к нагрузке, LAC).
Подавление раскачивания прицепа
В зависимости от скорости движения автомобили с прицепом подвержены раскачиванию вокруг вертикальной оси. Если автомобиль с прицепом или автопоезд движется со скоростью меньшей «критической» (обычно 90 км/ч и 130 км/ч), эти раскачивающие движения адекватно и быстро гасятся. Но если скорость оказывается выше, то небольшие повороты руля, боковой ветер или наезд на выбоину могут внезапно вызвать такие раскачивающие движения, которые быстро набирают интенсивность и в конечном счете могут привести к ДТП из-за складывания автопоезда.
Если автомобиль с прицепом или автопоезд движется со скоростью меньшей «критической» (обычно 90 км/ч и 130 км/ч), эти раскачивающие движения адекватно и быстро гасятся. Но если скорость оказывается выше, то небольшие повороты руля, боковой ветер или наезд на выбоину могут внезапно вызвать такие раскачивающие движения, которые быстро набирают интенсивность и в конечном счете могут привести к ДТП из-за складывания автопоезда.
Периодическая избыточная поворачиваемость вызывает стандартные стабилизирующие вмешательства ESP, но они обычно приходят поздно и сами по себе не способны стабилизировать автопоезд. Функция подавления раскачивания прицепа (TSM) своевременно выявляет раскачивающие движения на основе сигналов стандартных датчиков ESP; это делается посредством анализа скорости вращения тягача вокруг вертикальной оси на основе моделей, с учетом маневрирующих движений водителя. Когда эти раскачивающие движения достигают критического уровня, автопоезд автоматически тормозится для уменьшения скорости до такой степени, чтобы даже малейшее последующее возбуждение не вызвало немедленных критических колебаний. Чтобы как можно эффективнее погасить колебания в критической ситуации, в дополнение к симметричному торможению через все оси тягача выполняются притормаживания отдельных колес, быстро устраняющие раскачивание автопоезда. Ограничение крутящего момента двигателя предотвращает опасное ускорение автомобиля (инициируемое водителем) во время стабилизации.
Чтобы как можно эффективнее погасить колебания в критической ситуации, в дополнение к симметричному торможению через все оси тягача выполняются притормаживания отдельных колес, быстро устраняющие раскачивание автопоезда. Ограничение крутящего момента двигателя предотвращает опасное ускорение автомобиля (инициируемое водителем) во время стабилизации.
Активация других исполнительных органов ESP
Наряду с использованием гидравлических колесных тормозов, предусмотрены и другие исполнительные механизмы, посредством которых можно влиять на динамику движения автомобиля. Когда активное рулевое управление и системы шасси соединяются с ESP, образуя комплексную систему- систему управления динамикой автомобиля (Vehicle Dynamics Management, VDM), они в комплексе могут даже лучше поддержать водителя, что еще больше повышает безопасность движения и динамику вождения.
В то время как сочетание системы стабилизации рулевого управления с тормозной системой появилось в последние несколько лет, системы для активации блокировки дифференциала в трансмиссии уже давно представлены на рынке. Большое количество таких систем означает, что соединение с ESP возможно во многих случаях. Дополнительный исполнительный механизм может быть активирован либо непосредственно из расширенной функции ESP (принцип взаимодействия), либо через отдельный ЭБУ, обменивающийся информацией с ЭБУ ESP (параллельный принцип).
В полноприводных автомобилях создаваемый двигателем момент распределяется между обеими осями через межосевой дифференциал (рис. «Концепция полноприводного автомобиля с ESP» ). Когда двигатель сначала приводит в действие одну ось, а другая ось соединена с двигателем через межосевой дифференциал, такая система называется зависимой. Если этот межосевой дифференциал представляет собой разомкнутый дифференциал (без блокировки), то приводной момент ограничивается при увеличении пробуксовки одной оси. В самом неблагоприятном случае при пробуксовке колеса не происходит движения вперед. В сочетании с ESP симметричные вмешательства торможением контроллера TCS на все колеса могут ограничить межосевую разность скоростей колес и тем самым добиться продольного блокирующего эффекта.
Управление тяговым усилием системы ESP может также сопоставляться с особыми принципами работы других типов межосевых дифференциалов, таких как Torsen и вязкие муфты. В принципе, все управляемые исполнительные механизмы привода должны иметь определенный блокирующий момент и динамическую реакцию при размыкании и смыкании, чтобы адаптировать к себе подруливающие свойства автомобиля.
Если привод автомобиля может быть вручную переключен в различные режимы, то ESP может автоматически подстроиться под выбранный водителем режим. Поскольку ESP базируется на индивидуальном управлении колесами, то взаимодействие с механическими блокировками дифференциала для езды по бездорожью возможно лишь при возможности автоматического размыкания блокировки дифференциала во время вмешательств контроллера поперечной динамики. В противном случае систему необходимо переключить на аварийный режим ABS, когда включена блокировка, потому что вмешательства системы динамической стабилизации на одном колесе затронут и другие колеса, если оси жестко соединены.
Блокираторы межосевого дифференциала
Наряду с простыми соединениями между двумя осями, имеются управляемые блокираторы межосевого дифференциала, в которых электрический или гидравлический исполнительный орган активирует муфту, тем самым адаптируя момент блокировки (рис. «Концепция полноприводного автомобиля с ESP» ). Таким образом, на основании информации ESP (скорости колес, скорость автомобиля, скорость вращения вокруг вертикальной оси, боковое ускорение и крутящий момент двигателя), и с учетом переменных, специфичных для исполнительного органа (таких как механическая нагрузка) можно оптимально адаптировать соотношение двух осей к текущей ситуации движения (динамический крутящий момент при межосевом распределении, DCT-C).
Пример на рис. «Влияние распределения момента привода на поведение автомобиля» показывает, как переменное распределение приводного момента влияет на поведение автомобиля. Если в случае риска избыточной поворачиваемости при прохождении поворота можно временно перебросить часть крутящего момента на переднюю ось, это необходимо делать лишь намного позже во избежание потери устойчивости, для уменьшения крутящего момента двигателя или даже стабилизации автомобиля вмешательством тормозной системы (показано максимально возможное перераспределение крутящего момента привода).
Если в случае риска избыточной поворачиваемости при прохождении поворота можно временно перебросить часть крутящего момента на переднюю ось, это необходимо делать лишь намного позже во избежание потери устойчивости, для уменьшения крутящего момента двигателя или даже стабилизации автомобиля вмешательством тормозной системы (показано максимально возможное перераспределение крутящего момента привода).
Если автомобиль имеет тенденцию к недостаточной поворачиваемости, то её можно уменьшить путем смещения крутящего момента на заднюю ось. В обоих случаях достигается улучшение реакции автомобиля и повышение устойчивости. Пределы, в которых фактически возможно смещение крутящего момента привода, зависят от конфигурации конкретного привода.
Управляемый межколесный дифференциал на одной оси может быть активирован системой ESP по аналогичным линиям к гибкому соединению двух осей. В плане принципа работы система динамического распределения крутящего момента на колеса (Dynamic Wheel Torque Distribution, DWT) отличается лишь от блокировки межколесного дифференциала, выполняемой системой TCS через гидравлические колесные тормоза.
Однако такой дополнительный исполнительный орган в обычных ситуациях также активно распределяет момент привода между колесами одной оси. Это делается с минимальными потерями и с гораздо большей чувствительностью и комфортом, чем может быть достигнуто через управление тяговым усилием в сочетании с регулированием тормозного момента и уменьшением крутящего момента двигателя, учитывая износ гидравлического блока ESP.
Компоненты программы
Гидравлический блок, непосредственно подключенный к нему ЭБУ (добавочный ЭБУ) и датчики скорости работают в сложных условиях моторного отсека и колесных арок. Датчик вращения вокруг вертикальной оси и датчик бокового ускорения либо встраиваются в ЭБУ, либо, как датчик угла поворота, устанавливаются в салоне. На рис. «Компоненты ESP» показаны примерные места установки компонентов в автомобиле с электрическими и механическими соединениями.
Электронный блок управления
ЭБУ в виде печатной платы включает в себя, как и компьютер с двухъядерным процессором, все приводы и полупроводниковые реле для активации клапанов и насосов, а также интерфейсные контуры для обработки сигналов датчиков и соответствующие коммутирующие входы для дополнительных сигналов (например, выключатель стоп-сигнала). Имеются также интерфейсы (CAN, FlexRay) для сообщения с другими системами, такими как системы управления двигателем и трансмиссией.
Имеются также интерфейсы (CAN, FlexRay) для сообщения с другими системами, такими как системы управления двигателем и трансмиссией.
Гидравлический блок
Гидравлический блок (также называемый гидравлическим модулятором), как в системах ABS или ABS/TCS, образует гидравлическое соединение между главным тормозным цилиндром и рабочими цилиндрами колесных тормозов. Он преобразует управляющие команды ЭБУ и через электромагнитные клапаны регулирует давление в колесных тормозах. Гидравлический контур выполняется в виде каналов в алюминиевом блоке. Этот блок также используется для размещения необходимых элементов гидравлической функции (электромагнитных клапанов, плунжерных насосов и камер-аккумуляторов).
В системе ESP должно быть 12 клапанов независимо от конфигурации тормозных контуров (рис. «Схема гидравлического блока ESP (х-образная конфигурация тормозных контуров» ). Кроме того, обычно встраивается датчик давления, измеряющий инициируемое водителем замедление через тормозное давление в главном тормозном цилиндре. Это повышает эффективность стабилизации автомобиля при частично активных маневрах. Давление модулируется при регулировании со стороны ABS (пассивное регулирование) с помощью гидравлики ESP точно так же, как было описано для системы ABS.
Это повышает эффективность стабилизации автомобиля при частично активных маневрах. Давление модулируется при регулировании со стороны ABS (пассивное регулирование) с помощью гидравлики ESP точно так же, как было описано для системы ABS.
Но поскольку системы ESP также должны активно нагнетать давление (активное регулирование) или повышать тормозное давление, создаваемое водителем (частично активное регулирование), используемый в ABS возвратный насос заменяется самовсасывающим насосом для каждого контура. Рабочие цилиндры тормозных механизмов колес и главный тормозной цилиндр соединяются через коммутационный клапан, открываемый при нулевом электрическом токе, и переключающий клапан высокого давления.
Дополнительный невозвратный клапан с определенным давлением закрытия предотвращает высасывание лишней тормозной жидкости из цилиндров колес. Насосы приводятся в действие электродвигателем постоянного тока в зависимости от потребностей. Двигатель вращает расположенный на его валу эксцентриковый подшипник.
На рис. «Модуляция давления в гидравлическом блоке ESP» показаны три примера модуляции давления. Чтобы нагнеталось давление независимо от водителя (рис. с), коммутационные клапаны закрываются, а переключающие клапаны высокого давления — открываются. Теперь самовсасывающий насос подает тормозную жидкость на соответствующее колесо или колёса, нагнетая давление. Впускные клапаны других колес остаются закрытыми.
Чтобы уменьшить давление, выпускные клапаны открываются, а переключающие клапаны высокого давления возвращаются в исходное положение (рис. b). Тормозная жидкость вытекает из рабочих тормозных цилиндров колес в резервуары низкого давления, опорожняемые насосами. Управление двигателем насоса, в зависимости от потребностей, уменьшает шум при нагнетании и регулировании давления.
Для частично активного управления (рис. а) переключающий клапан высокого давления должен быть способен открывать всасывающий канал насоса при высоком дифференциальном давлении (> 0,1 МПа). Первая ступень клапана открывается за счет магнитной силы катушки, находящейся под напряжением, а вторая ступень — за счет разности гидравлических площадей. Если контроллер ESP обнаружит нестабильное состояние автомобиля, то коммутирующие клапаны (открытые при нулевом электрическом токе) закрываются, а переключающий клапан высокого давления (закрытый при нулевом электрическом токе) открывается.
Первая ступень клапана открывается за счет магнитной силы катушки, находящейся под напряжением, а вторая ступень — за счет разности гидравлических площадей. Если контроллер ESP обнаружит нестабильное состояние автомобиля, то коммутирующие клапаны (открытые при нулевом электрическом токе) закрываются, а переключающий клапан высокого давления (закрытый при нулевом электрическом токе) открывается.
Затем два насоса генерируют дополнительное давление для стабилизации автомобиля. По завершении вмешательства системы открывается выпускной клапан, и тормозная жидкость из рабочего тормозного цилиндра регулируемого колеса выходит в аккумулятор. Как только водитель отпустит педаль тормоза, тормозная жидкость откачивается из аккумулятора обратно в бачок.
Система контроля
Комплексная система контроля безопасности является фундаментальной для обеспечения надежного функционирования ESP. Система контроля безопасности охватывает работу системы ESP вместе с ее компонентами и всеми другими функциональными взаимосвязями. В основе системы контроля безопасности лежат такие методы, как FMEA, FTA и исследования с моделированием неисправностей. Применяются методы по исключению ошибок, которые бы имели последствия, относящиеся к безопасности. Крупномасштабные программы контроля гарантируют надежное и точное определение всех ошибок датчиков, которые не могут быть полностью исключены. Эти программы основаны на хорошо разработанных надежных программных обеспечениях систем ABS и TCS, контролирующих все компоненты, подключенные к ЭБУ вместе с их электрическими подсоединениями. Со временем надежное программное обеспечение улучшалось более полным использованием возможностей, предоставлявшихся дополнительными датчиками и их последующим приспособлением к специальным компонентам и функциям ESP.
В основе системы контроля безопасности лежат такие методы, как FMEA, FTA и исследования с моделированием неисправностей. Применяются методы по исключению ошибок, которые бы имели последствия, относящиеся к безопасности. Крупномасштабные программы контроля гарантируют надежное и точное определение всех ошибок датчиков, которые не могут быть полностью исключены. Эти программы основаны на хорошо разработанных надежных программных обеспечениях систем ABS и TCS, контролирующих все компоненты, подключенные к ЭБУ вместе с их электрическими подсоединениями. Со временем надежное программное обеспечение улучшалось более полным использованием возможностей, предоставлявшихся дополнительными датчиками и их последующим приспособлением к специальным компонентам и функциям ESP.
Работа датчиков контролируется в несколько этапов. Во время первой стадии датчики непрерывно контролируются во время управления автомобилем на обрыв проводов и вероятность прохождения сигнала (внедиапазонная проверка, определение помех, физическое правдоподобие). В течение второго этапа наиболее важные датчики проверяются отдельно. Датчик скорости вращения вокруг вертикальной оси испытывается путем преднамеренной расстройки чувствительного элемента и затем оценивается на прохождение сигнала. Даже датчик ускорения имеет внутренний фоновый контроль. При активации сигнал датчика давления должен показывать предопределенную характеристику; происходит внутренняя компенсация смещения и усиления. Датчик угла поворота рулевого колеса имеет свои собственные контрольные функции, которые непосредственно сопровождают какое-либо ошибочное сообщение, поступающее к ЭБУ. Дополнительно контролирует цифровой сигнал, постоянно передаваемый к ECU. Во время третьего этапа применяется аналитическая избыточность для контроля работы датчиков во время стационарного режима эксплуатации автомобиля. В данном случае используется модель автомобиля с целью проверить тот факт, что не имеется нарушений для определенных связей между сигналами датчиков и движением автомобиля.
В течение второго этапа наиболее важные датчики проверяются отдельно. Датчик скорости вращения вокруг вертикальной оси испытывается путем преднамеренной расстройки чувствительного элемента и затем оценивается на прохождение сигнала. Даже датчик ускорения имеет внутренний фоновый контроль. При активации сигнал датчика давления должен показывать предопределенную характеристику; происходит внутренняя компенсация смещения и усиления. Датчик угла поворота рулевого колеса имеет свои собственные контрольные функции, которые непосредственно сопровождают какое-либо ошибочное сообщение, поступающее к ЭБУ. Дополнительно контролирует цифровой сигнал, постоянно передаваемый к ECU. Во время третьего этапа применяется аналитическая избыточность для контроля работы датчиков во время стационарного режима эксплуатации автомобиля. В данном случае используется модель автомобиля с целью проверить тот факт, что не имеется нарушений для определенных связей между сигналами датчиков и движением автомобиля. Эти модели также часто применяются для вычислений и компенсирования смещений датчиков, поскольку они остаются в пределах технических условий.
Эти модели также часто применяются для вычислений и компенсирования смещений датчиков, поскольку они остаются в пределах технических условий.
В случае возникновения ошибки система выключается или частично, или полностью, что зависит от типа ошибки. Реагирование системы на ошибки также зависит от того, действительно ли осуществлялось управление.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ:
Медвежья услуга. Какими проблемами грозит система стабилизации? | Обслуживание | Авто
Электронные системы стабилизации сейчас приобрели широкую популярность. Они устанавливаются не только на дорогие модели, но идут уже и на машины массового сегмента и входят в базовые пакеты оснащения. Во время нештатных ситуаций они выручают из беды, помогают оставаться на дороге и эффективно борются с заносами и сносами.
Однако иногда такое вмешательство бывает некстати. Некоторые драйверские приемы, отлично получающиеся на старых «девятках», «десятках», «Калинах» и даже престарелых BMW, не выходят, если пытаться проделать их, сидя за рулем какого-нибудь современного Polo-седана. В итоге электронные защитники пасуют, и драйверские финты оборачиваются неприятными казусами. О каких же негативных сторонах электронных систем стабилизации необходимо знать, чтобы не попасть впросак?
В итоге электронные защитники пасуют, и драйверские финты оборачиваются неприятными казусами. О каких же негативных сторонах электронных систем стабилизации необходимо знать, чтобы не попасть впросак?
Как работает система стабилизации?
Электронная система стабилизации ESP состоит из нескольких составляющих.
Электрогидравлический блок с контроллером нагнетает давление в тормозной системе. Датчики частоты вращения колес и угла поворота рулевого колеса помогают компьютеру высчитывать траекторию движения машины. Прибор для измерения линейных и угловых ускорений фиксирует развитие заноса или сноса, а электронный блок обрабатывает всю эту информацию. Вместе с ESP работают другие электронные помощники, такие как антиблокировочная система (ABS), соединенная с технологией распределения тормозных усилий (EBD), а также электронная блокировка дифференциала (EDS) и антипробуксовочная система (ASR).
В целом работу электронных устройств можно представить следующим образом.
К примеру, водитель превысил скорость при вхождении в поворот, и машину начало сносить с дороги к обочине. ESP вступает в действие и препятствует сносу путем подтормаживания заднего внутреннего колеса и снижения крутящего момента двигателя. Тем самым кузов транспортного средства получает дополнительный разворачивающий момент и изменяет траекторию движения. Машина подкручивается и выходит из сноса.
Если автомобиль, наоборот, уходит в занос, то есть намеревается забросить корму в сторону, то электроника подтормаживает уже переднее наружное колесо и снижает тягу на ведущих колесах.
И в том и в другом случае электроника не дает машине разгоняться, пока она не встанет на верную траекторию. Блок управления «душит» мотор и убирает тягу с колес. В этом-то и заключается «медвежья услуга» ESP.
Потеря тяги в повороте
Водителям, знающим особенности поведения на дороге переднеприводных автомобилей, хорошо известно правило, что потеря тяги в повороте приводит к развитию сноса. Они резонно замечают, что не вовремя брошенная педаль газа приводит к неприятностям. ESP помимо подтормаживания колес убирает и эту драгоценную тягу. Ведущие колеса перестают царапаться за поверхность, их вектор силы не вытягивает машину из опасной ситуации. В итоге транспортное средство уходит в еще больший снос, пока сила трения не компенсирует силы инерции.
Они резонно замечают, что не вовремя брошенная педаль газа приводит к неприятностям. ESP помимо подтормаживания колес убирает и эту драгоценную тягу. Ведущие колеса перестают царапаться за поверхность, их вектор силы не вытягивает машину из опасной ситуации. В итоге транспортное средство уходит в еще больший снос, пока сила трения не компенсирует силы инерции.
При настройке массовых моделей инженеры исходят их того факта, что в подавляющем большинстве случаев управляют легковыми автомобилями водители, которым чужды приемы спортивного вождения. В опасной ситуации они часто теряются и паникуют. Для таких водителей принятые алгоритмы ESP действительно большое благо. И отключать ее не рекомендуется.
Проще отказаться от спортивного стиля езды, хотя бы в зимний период.
Зарыться в снегу
Однако бывалые автомобилисты приводят еще один пример неадекватного поведения системы стабилизации. В рыхлом снегу она не дает машине буксовать, убирает тягу с колес и фактически обездвиживает автомобиль в сугробе. Причем это вмешательство происходит настолько неожиданно, что водитель просто не успевает отключить электронику кнопкой, и машина зарывается в снежной каше. Если просто отключить ее, то на скользкой дороге в повороте повышается риск развития сноса.
Причем это вмешательство происходит настолько неожиданно, что водитель просто не успевает отключить электронику кнопкой, и машина зарывается в снежной каше. Если просто отключить ее, то на скользкой дороге в повороте повышается риск развития сноса.
Решение было найдено просто. Сейчас появились современные системы стабилизации с двухступенчатым отключением. При одном нажатии ослабляет хватку противобуксовочная система. Машина перестает снижать крутящий момент на колесах и позволяет буксовать. Эта функция — настоящее спасение для водителей в странах со снежными и холодными зимами. Ради безопасности можно и отказаться от устаревших приемов вождения, которые господствовали в доэлектронную эпоху.
Смотрите также:
Системы стабилизации и как они работают
Автор Лукас Уикли Как видно из осеннего выпуска Park Pilot за 2016 год.
Стабилизация — это развивающаяся технология в радиоуправляемом хобби. Если вы еще не заметили, многие из современных RC-устройств, такие как мультикоптеры, невозможно летать без их сложных систем стабилизации. Вы также можете быть удивлены, узнав, что многие самолеты RTF (Ready to Fly) используют какой-то стабилизатор. Теперь давайте посмотрим, как это произошло и как работает стабилизация.Системы стабилизации состоят из какого-то датчика, устройства для интерпретации сигналов от этого датчика (обычно это небольшой микропроцессор) и способа смешивания этих сигналов с физическими средствами управления тем, что стабилизируется. Эти части работают вместе, чтобы измерить изменения в движении и положении, например, в радиоуправляемом самолете. Информация используется для смягчения или корректировки этих изменений. Сенсор — это самая сложная часть, которая стала миниатюрной, о чем я расскажу позже. Одним из первых способов измерения изменений в движении было использование физического вращающегося гироскопа.Если масса вращается с достаточно высокой скоростью, она может проявлять характеристики гироскопа, аналогичные многим игрушкам, с которыми мы, вероятно, играли. Гироскоп сопротивляется движению по одной оси и может использоваться в качестве контрольной точки для измерения фиксированного положения относительно движущегося тела.
Вы также можете быть удивлены, узнав, что многие самолеты RTF (Ready to Fly) используют какой-то стабилизатор. Теперь давайте посмотрим, как это произошло и как работает стабилизация.Системы стабилизации состоят из какого-то датчика, устройства для интерпретации сигналов от этого датчика (обычно это небольшой микропроцессор) и способа смешивания этих сигналов с физическими средствами управления тем, что стабилизируется. Эти части работают вместе, чтобы измерить изменения в движении и положении, например, в радиоуправляемом самолете. Информация используется для смягчения или корректировки этих изменений. Сенсор — это самая сложная часть, которая стала миниатюрной, о чем я расскажу позже. Одним из первых способов измерения изменений в движении было использование физического вращающегося гироскопа.Если масса вращается с достаточно высокой скоростью, она может проявлять характеристики гироскопа, аналогичные многим игрушкам, с которыми мы, вероятно, играли. Гироскоп сопротивляется движению по одной оси и может использоваться в качестве контрольной точки для измерения фиксированного положения относительно движущегося тела. Одними из первых самолетов с дистанционным управлением, которым потребовалась какая-то стабилизация, были вертолеты с дистанционным управлением, в частности, по оси рыскания, где небольшие изменения дроссельной заслонки, шага лопастей, поступательного движения или ветра могли привести к тому, что вертолет выйдет из-под контроля слишком быстро для ручной коррекции.Гироскопы, аналогичные тем, что я описал ранее, использовались для измерения изменений оси рыскания и стабилизации самолета. Набор тяжелых вращающихся дисков создал гироскоп. Положение измерялось с помощью магнитных или соединительных переключателей. Это измеренное изменение углового ускорения — когда самолет начинает рыскать — механически увеличивает или уменьшает шаг лопастей на хвостовом винте, прежде чем вертолет выйдет из-под контроля. Флайбар на вертолете RC также является еще одной формой гироскопического стабилизатора.Однако не ищите большие вращающиеся диски на плате контроллера мультиротора. Сегодня более простой способ измерения изменений в движении называется МЭМС (микроэлектромеханические системы).
Одними из первых самолетов с дистанционным управлением, которым потребовалась какая-то стабилизация, были вертолеты с дистанционным управлением, в частности, по оси рыскания, где небольшие изменения дроссельной заслонки, шага лопастей, поступательного движения или ветра могли привести к тому, что вертолет выйдет из-под контроля слишком быстро для ручной коррекции.Гироскопы, аналогичные тем, что я описал ранее, использовались для измерения изменений оси рыскания и стабилизации самолета. Набор тяжелых вращающихся дисков создал гироскоп. Положение измерялось с помощью магнитных или соединительных переключателей. Это измеренное изменение углового ускорения — когда самолет начинает рыскать — механически увеличивает или уменьшает шаг лопастей на хвостовом винте, прежде чем вертолет выйдет из-под контроля. Флайбар на вертолете RC также является еще одной формой гироскопического стабилизатора.Однако не ищите большие вращающиеся диски на плате контроллера мультиротора. Сегодня более простой способ измерения изменений в движении называется МЭМС (микроэлектромеханические системы). Как следует из названия, это крошечные механические измерительные устройства, вытравленные в кремнии с использованием пьезоэлектрических колебаний вместо вращающегося гироскопа для измерения угловых ускорений. Умопомрачительный!
Как следует из названия, это крошечные механические измерительные устройства, вытравленные в кремнии с использованием пьезоэлектрических колебаний вместо вращающегося гироскопа для измерения угловых ускорений. Умопомрачительный!
Это изображение гироскопа MEMS, полученное с помощью электронного микроскопа. Этот конкретный датчик был взят из iPhone, но он похож на те, что используются в платах контроллеров полета.Фото: IFixit.com. Изображение используется по лицензии Creative Commons: www.ifixit.com/Guide/Image/meta/MeunHawo54qPRY5S.
Проще говоря, точно так же, как вращающийся диск любит оставаться фиксированным на определенной оси, вибрирующий стержень хочет вибрировать в своей текущей плоскости и будет сопротивляться вращению или перемещению из своего положения. Вибрируя крошечную гребенчатую структуру с помощью электричества, можно обнаружить изменения в скорости и интенсивности вибрации гребня, которые можно использовать для измерения изменений внешнего ускорения.
 Существует много видов гироскопов MEMS, и я рекомендую вам изучить технологию, если вы хотите узнать о них больше. Они действительно восхитительны. Эти новые датчики стали доступны потребителям в конце 1990-х — начале 2000-х годов. Они были меньше и легче любых механических предшественников. Вертолеты RC начали использовать их, учитывая меньшие вертолеты. Позже было добавлено больше гироскопов, чтобы почувствовать изменения во всех трех осях, создав вертолеты без флайбара.
Существует много видов гироскопов MEMS, и я рекомендую вам изучить технологию, если вы хотите узнать о них больше. Они действительно восхитительны. Эти новые датчики стали доступны потребителям в конце 1990-х — начале 2000-х годов. Они были меньше и легче любых механических предшественников. Вертолеты RC начали использовать их, учитывая меньшие вертолеты. Позже было добавлено больше гироскопов, чтобы почувствовать изменения во всех трех осях, создав вертолеты без флайбара. Когда появились гироскопы MEMS, старые физические гироскопы были заменены небольшими, легкими коробками, которые не потребляли много энергии и были более точными.
Примерно в то же время люди брали гироскопы для одноосных радиоуправляемых вертолетов и ориентировали их, соединяли, микшировали, паяли и взламывали вместе, чтобы создать первые системы стабилизации для RC-мультикоптеров. Что было интересно в мультикоптерах, так это то, что вы могли смешать вместе несколько регуляторов скорости и получить управление газом, тангажем, креном и рысканием без гироскопов, но им было невозможно летать без какой-либо стабилизации из-за внутренней нестабильности конструкции.
 Эти импровизированные, сколотые стабилизаторы были примитивными и ограниченными в возможности настройки.Тем не менее, у людей не заняло много времени начать использовать новые гироскопы MEMS самостоятельно и сделать специальные платы управления полетом и стабилизации для мультикоптеров, но возникла проблема. Гироскопы могут измерять только изменения в движении; они не могут отличить верх от низа. Гироскопы MEMS также дрейфуют, теряя свою точность на протяжении всего полета. Если бы у вас был мультикоптер только с гироскопами, вам все равно пришлось бы вручную удерживать его на месте и постоянно обрезать, чтобы он летел по уровню. Решением было использовать другой датчик MEMS, называемый акселерометром, который может быть похож на конструкцию вышеупомянутого гироскопа MEMS, но настроен на измерение линейного ускорения вместо углового ускорения.Акселерометр может измерять силу тяжести по всем трем осям, а с помощью некоторой тригонометрии может определять, где находятся верхний и нижний (это также то, как ваш смартфон может определить, что идет вверх и вниз).
Эти импровизированные, сколотые стабилизаторы были примитивными и ограниченными в возможности настройки.Тем не менее, у людей не заняло много времени начать использовать новые гироскопы MEMS самостоятельно и сделать специальные платы управления полетом и стабилизации для мультикоптеров, но возникла проблема. Гироскопы могут измерять только изменения в движении; они не могут отличить верх от низа. Гироскопы MEMS также дрейфуют, теряя свою точность на протяжении всего полета. Если бы у вас был мультикоптер только с гироскопами, вам все равно пришлось бы вручную удерживать его на месте и постоянно обрезать, чтобы он летел по уровню. Решением было использовать другой датчик MEMS, называемый акселерометром, который может быть похож на конструкцию вышеупомянутого гироскопа MEMS, но настроен на измерение линейного ускорения вместо углового ускорения.Акселерометр может измерять силу тяжести по всем трем осям, а с помощью некоторой тригонометрии может определять, где находятся верхний и нижний (это также то, как ваш смартфон может определить, что идет вверх и вниз). Д. Конечно, это вызвало обсуждение того, когда справедливо использовать стабилизацию. .
Д. Конечно, это вызвало обсуждение того, когда справедливо использовать стабилизацию. . Это первая плата полетного контроллера, которую я купил и с которой летал. Спереди три серебряных шкатулки. Это гироскопы MEMS на их осях ориентации.
Во время любых соревнований по высшему пилотажу или гонкам с самолетами с неподвижным крылом использование какой-либо стабилизации для улучшения характеристик самолета может быть неуместным.С другой стороны, мультикоптеры для гонок должны использовать стабилизаторы для полета, а настройки, которые выбирает каждый гонщик, являются показательными для его или ее индивидуальных навыков и стиля полета. Хотя это может быть темой совершенно другой статьи, те же самые системы, которые многие могут посчитать обманом, позволяют начинающим пилотам быстрее учиться и преодолевать некоторые разочарования, связанные с обучением пилотированию RC. Некоторые новейшие учебно-тренировочные самолеты, такие как Horizon Hobby Apprentice, даже имеют датчики уклонения от земли и встроенную систему автопилота, которая может управлять самолетом за вас, если вы потеряете контроль.Теперь, вместо того, чтобы нажимать на переключатель тренера, как это делается при использовании коробки для приятелей, самолет может самокорректироваться и вернуть вам управление! Эта технология в конечном итоге означает, что хобби становится более доступным для людей, которые используют эти новые самолеты для начинающих. Эти же люди могут затем начать другие проекты в рамках своего хобби, которые могут не нуждаться в стабилизации. Тем не менее, стабилизация будет неотъемлемой частью определения того, как RC будет выглядеть в будущем, и я очень рад возможности!
типов операционных систем | HowStuffWorks
В широком семействе операционных систем обычно есть четыре типа, разделенных на категории в зависимости от типов компьютеров, которыми они управляют, и типа поддерживаемых ими приложений.Категории:
- Операционная система реального времени (RTOS) — Операционные системы реального времени используются для управления оборудованием, научными приборами и промышленными системами. RTOS обычно имеет очень мало возможностей пользовательского интерфейса и не имеет служебных программ для конечного пользователя, поскольку при поставке для использования система будет «запечатанным ящиком». Очень важная часть ОСРВ — это управление ресурсами компьютера, чтобы определенная операция выполнялась в одно и то же время каждый раз, когда она происходит.В сложной машине более быстрое перемещение детали только потому, что доступны системные ресурсы, может быть столь же катастрофическим, как если бы она вообще не двигалась из-за занятости системы.
- Однопользовательская, одна задача — Как следует из названия, эта операционная система предназначена для управления компьютером, чтобы один пользователь мог эффективно выполнять одно задание одновременно. Palm OS для карманных компьютеров Palm — хороший пример современной однопользовательской, однозадачной операционной системы.
- Однопользовательская, многозадачная — это тип операционной системы, которую сегодня большинство людей используют на своих настольных и портативных компьютерах.Платформы Windows от Microsoft и MacOS от Apple являются примерами операционных систем, которые позволяют одному пользователю работать с несколькими программами одновременно. Например, пользователь Windows вполне может написать заметку в текстовом процессоре при загрузке файла из Интернета при печати текста сообщения электронной почты.
- Многопользовательская — Многопользовательская операционная система позволяет множеству разных пользователей одновременно использовать ресурсы компьютера.Операционная система должна гарантировать, что требования различных пользователей сбалансированы, и что каждая из программ, которые они используют, имеет достаточные и отдельные ресурсы, чтобы проблема с одним пользователем не затрагивала все сообщество пользователей. Операционные системы Unix, VMS и мэйнфреймы, такие как MVS , являются примерами многопользовательских операционных систем.
Важно различать многопользовательские операционные системы и однопользовательские операционные системы, поддерживающие работу в сети.Windows 2000 и Novell Netware могут поддерживать сотни или тысячи сетевых пользователей, но сами операционные системы не являются настоящими многопользовательскими операционными системами. Системный администратор — единственный «пользователь» Windows 2000 или Netware. Сетевая поддержка и все входы удаленных пользователей, которые обеспечивает сеть, в общем плане операционной системы представляют собой программу, запускаемую пользователем с правами администратора.
Учебные пособия по стабилизации
Устройство для стабилизации установки
Риг позволяет экспортировать стабилизацию кадра в пакеты 3D-анимации и композитинга, так что стабилизированные изображения могут быть сгенерированы там, а не записаны SynthEyes.В руководстве показано, как создаются риги для различных случаев, включая экспорт в After Effects, Fusion и Blender. Требуются обновленные скрипты!
02.11.2018. 39:03 долго.
Узнать больше
Решение дальних ударов по частям
Показывает, как решать длинные снимки — обычные или 360VR — путем обработки их как отдельных частей, а затем объединения результатов. В руководстве показано, как отслеживается, решается и стабилизируется почти 19-минутный (33 659 кадров) снимок 360VR.Исходные кадры находятся на https://youtu.be/dtaTAJcGCXI, а результат — на https://youtu.be/MH6ZsWR8Zzc
.18 мая 2017 г. 21:00 долго.
Узнать больше
Святилище Блэк Рок — Стабилизированный
Это 360VR-тур по интерпретационной тропе в заповеднике Блэк-Рок, округ Честер, штат Пенсильвания. SynthEyes использовался для стабилизации исходного материала Ricoh Theta S (https://youtu.be/dtaTAJcGCXI) с помощью метода, описанного в https: // youtu.be / lViQjXzqcW8 Блокировка виртуального / реального мира фиксируется на протяжении всего кадра, что является отличительной чертой усовершенствованной стабилизации SynthEyes. В результате снимок очень смотрибельный. См. 2:50, 5:55, 8:40, 10:45, а также 13:55, 15:45, 17:25 для более сложных мест. Конечно, для хорошего тура нам действительно нужна камера с более высоким разрешением! Остающиеся артефакты в кадре: движение вверх и вниз из-за ходьбы и оставшиеся нефиксированные проблемы с отслеживанием, но, что наиболее важно, из-за скользящего затвора (желе) в двух датчиках камеры CMOS.Это проявляется в местах, где часть выстрела движется, а остальная остается неподвижной. Так что сделайте эту камеру с глобальным затвором более высокого разрешения!
18 мая 2017 г. 18:44 долго.
Узнать больше
Экскурсия по святилищу Блэк-Рок — As Shot (нестабильный)
Это 360VR-тур по интерпретирующей тропе в Black Rock Sanctuary, округ Честер, штат Пенсильвания, снятый камерой Ricoh Theta S (~ 2K с только стабилизацией в камере на основе акселерометра).См .: 2:50, 5:55, 8:40, 10:45, а также 13:55, 15:45, 17:25. Это необработанные кадры для нашего учебника «Решение дальних планов» (https://youtu.be/lViQjXzqcW8). Получившуюся в результате стабилизированную и гораздо более удобную для просмотра версию этого видео можно найти на https://youtu.be/MH6ZsWR8Zzc. Вы можете открыть обе на отдельных вкладках и сравнить их.
18 мая 2017 г. 18:44 долго.
Узнать больше
Введение в стабилизацию 360VR в SynthEyes
Стабилизация необходима для безопасного просмотра видео в формате 360VR с движущихся камер.В этом вводном руководстве показана стабилизация последовательности 360VR сверхлегкого самолета (любезно предоставлена 360Rize) и экспорт этой стабилизации в After Effects. Это демо было представлено на выставке NAB Show 2017.
28 апреля 2017 г. 10:48 долго.
Узнать больше
Поэтапная стабилизация дальних ударов 360VR
Показывает более простую форму стабилизации на основе фильтрации для длинных снимков 360VR, разбивая их на части, стабилизируя части, а затем повторно комбинируя их.(См. Https://youtu.be/lViQjXzqcW8 для лучшего и более жесткого метода.) Показывает полученные данные стабилизации, экспортируемые в AfterEffects, в данном случае для использования плагина SkyBox. Также можно использовать плагин, предоставленный SynthEyes; данные также можно экспортировать в HitFilm.
13 апреля 2017 г. 25:23 долго.
Узнать больше
Применение стабилизации 360VR в AfterEffects
Показывает, как вы можете экспортировать стабилизацию 360VR, которую вы выполняете в SynthEyes, в AfterEffects, чтобы вы могли выполнять всю работу по 2D-композитингу в AfterEffects без необходимости генерировать стабилизированные изображения в SynthEyes.Требуется подключаемый модуль из части веб-сайта, предназначенной только для клиентов (1608) или в SynthEyes (после 1608). Отключено для демонстрации SynthEyes. Кадры любезно предоставлены 360Rize.com
26 августа 2016. 4:56 долго.
Узнать больше
Простая стабилизация 360VR
Здесь мы показываем более простую версию стабилизации 360VR, которая не использует полное трехмерное решение сцены, для снимков, где не требуется абсолютная ориентация на мир. Подходит для коротких снимков с использованием режима Peg или длинных снимков с использованием стабилизации на основе фильтрации нижних частот.Кадры любезно предоставлены 360Rize.com
24 августа 2016. 12:05 долго.
Узнать больше
Сохранение карт стабилизации
Демонстрирует способ экспорта стандартной стабилизации или стабилизации 360VR из SynthEyes в другие приложения для композитинга, так что фактическая обработка изображения выполняется там. Это можно сделать с помощью анимированных карт искажения изображения для описания эффекта стабилизации. Здесь мы показываем это с помощью Fusion от Blackmagic Design.Кадры любезно предоставлены 360Rize.com
24 августа 2016. 11:22 долго.
Узнать больше
Почему стабилизация SynthEyes?
Официальный документ о стабилизации SynthEyes по сравнению с простой 2-D стабилизацией.
2 апреля 2007 г.
Узнать больше
Дорожная стабилизация изображения
В этом туториале демонстрируется работа системы стабилизации SynthEyes в режиме фильтра, который используется для длительных «путешествующих» снимков.В данном случае исходный материал взят из Stickypod, наклеенного на переднее лобовое стекло автомобиля, а затем проезжающего по дороге.
10 июля 2007 г. 3:18 долгое. ★★
Узнать больше
Стабилизация изображения
Peg-mode стабилизация — камера на орбите цели
6 апреля 2007 г. 6:32 долго. ★★
Узнать больше
Отслеживание и стабилизация, экспорт в Bentley Microstation
В этом руководстве демонстрируется полный рабочий процесс, отслеживание и стабилизация снимка в SynthEyes, сохранение изображений, экспорт в Bentley MicroStation, а затем в MicroStation, импорт файла MSA, настройка MicroStation и добавление небольшой внешней модели.После создания модели и настройки текстур в MicroStation следующим шагом будет визуализация (запись) анимации.
7 мая 2007 г. 7:17 долго.
Узнать больше
Оптимальная политика экономической стабилизации в условиях неопределенности
1. Введение
Макроэкономическая модель может быть проанализирована в рамках экономического регулирования с использованием методов стохастического оптимального управления [Holbrook, 1972; Чоу, 1974; Турновский, 1974; Питчфорд и Терновский, 1977; Холл и Генри, 1988].Эта концепция регулятора больше подходит, когда присутствует неопределенность [Leland, 1974; Бертсекас, 1987]. Макроэкономическая модель обычно состоит из разностных или дифференциальных уравнений, переменные которых относятся к трем основным типам: (а) эндогенные переменные, описывающие состояние экономики, (б) управляющие переменные, которые являются инструментами экономической политики для направления траектории к равновесию. цель, и (c) экзогенные переменные, которые описывают неконтролируемую среду. Учитывая последовательность экзогенных переменных во времени, задача динамической оптимальной стабилизации заключается в нахождении последовательности управлений, чтобы минимизировать некоторую квадратичную целевую функцию [Turnovsky, 1974; Рао, 1987].Оптимальное управление — это один из возможных регуляторов динамической системы, имеющий линейно-квадратичный регулятор и использующий принцип Понтрягина или метод динамического программирования [Preston, 1974; Камиен и Шварц, 1991; Соренсен и Уитта-Якобсен, 2005]. Гибкая модель мультипликатора-ускорителя приводит к правилу линейной обратной связи для оптимальных государственных расходов. Полученное линейное дифференциальное уравнение первого порядка с изменяющимися во времени коэффициентами может быть интегрировано в бесконечном горизонте.Он состоит из пропорциональной политики, интегральной политики, взвешенной по экспоненте, плюс другие условия, зависящие от начальных условий [Turnovsky, 1974]. Введение стохастических параметров и дополнительных случайных возмущений приводит к тому же виду правил обратной связи [Турновский, 1974]. Стохастические возмущения могут влиять на коэффициенты (мультипликативные возмущения) или уравнения (аддитивные остаточные возмущения) при условии, что возмущения не слишком велики [Poole, 1957; Брейнард, 1967; Aström, 1970; Чоу, 1972; Турновский 1973, 1974, 1977; Бертсекас, 1987].Тем не менее, этот подход сталкивается с трудностями, когда неопределенности очень высоки или когда расчет вероятности не помогает с очень неточными данными. Нечеткая логика способствует прагматическому решению такой проблемы, поскольку работает с нечеткими числами. В нечеткой логике логические переменные принимают значения продолжения от 0 (ложь) до 1 (истина), в то время как классическая булева логика работает с дискретными значениями 0 или 1. Нечеткие множества являются естественным продолжением четких множеств [Klir & Yuan , 1995].Чаще всего их функции принадлежности имеют треугольную или трапециевидную форму. Нечеткий контроллер действует как искусственное лицо, принимающее решения, которое действует в замкнутой системе в реальном времени [Passino & Yurkovich, 1998]. Этот вклад касается оптимальных политик стабилизации с использованием динамических стохастических систем. Для регулирования экономики в условиях неопределенности помощь классических стохастических регуляторов [Aström, 1970; Sage & White, 1977, Kendrick, 2002] и нечеткие контроллеры [Lee, 1990; Коско, 1992; Чанг и О, 1993; Инь, 2000].Вычисления выполняются с использованием пакетов Mathematica 7.0.1, FuzzyLogic 2 [Китамото и др., 1992; Стахович и Билл, 2003; Wolfram, 2003], Matlab R2008a и Simulink 7, и системы управления и нечеткая логика 2 [Lutovac et al., 2001; MathWorks, 2008]. В этой главе мы рассмотрим три основных момента, касающихся проблем стабилизации с помощью макроэкономических моделей: (а) стабилизация динамических систем в стохастической среде, (б) ПИД-регулирование динамических макроэкономических моделей с применением к линейному мультипликатору-ускорителю Филлипса. модели и нелинейной модели Гудвина, (c) нечеткое управление этими двумя динамическими базовыми моделями.
2. Стабилизация динамических систем при стохастических ударах
2.1 Оптимальная стабилизация стохастических систем
2.1.1 Стандартная задача стабилизации
Сначала представлена задача оптимальной стабилизации с детерминированными коэффициентами. Эта исходная форма, не подходящая для применения теории управления, преобразуется в более удобную форму. В форме управления системой переписываются ограничения и целевые функции. Следуя Турновскому, пусть система описывается следующим матричным уравнением
Yt = A1Yt − 1 + A2Yt − 2 +… + AmYt − m + B0Ut + B1Ut − 1 + … + BnUt − nE1
Система (1) состоит из переменных q1target в мгновенных векторах и векторах с задержкой Y и инструментов политики q2 в векторах мгновенного и с задержкой U. Максимальные задержки установлены для Y и U соответственно. Квадраты матриц A q1 × q1 связаны с целями, а матрицы B q1 × q2 связаны с приборами. Все элементы этих матриц подвержены стохастическим шокам. Предположим, что целью лица, определяющего политику, является стабилизация системы близко к долгосрочному равновесию, квадратичная целевая функция будет
∑t = 1∞ (Yt − Y¯) ′ M (Yt − Y¯) + t = 1∞ (Ut − U¯) ′ N (Ut − U¯) E2
где M — строго положительная матрица определенных затрат, связанная с целевыми показателями, и N — положительная определенная матрица, связанная с инструментами.Согласно (1), два набора Y¯ иU¯ долгосрочных целей необходимы, чтобы удовлетворить
(I − ∑j = 1mAj) Y¯ = ∑i = 0nBiU¯E3
Допустим, что отклонения равны Yt − Y¯ = ytandUt − U¯ = ut, оптимальная задача —
minu (∑t = 1∞y′tMyt + ∑t = 1∞u′tNut) styt = A1yt − 1 + A2yt − 2 + … + Amyt − m + B0ut + B1ut − 1 + … + Bnut − nE4
2.1.2 Форма системы в пространстве состояний
Ограничение (2) преобразуется в эквивалентную систему первого порядка [Preston & Pagan, 1982]
xt = Axt − 1 + BvtE5
, где xt = (ytyt − 1yt − 2 ,…, yt − m + 1utut − 1, …, ut − n + 1) — вектор g × 1-й степени с g = mq1 + nq2. Вектор управления isvt = ut. Блочная матрица A и вектор B определены как
. Любая стабилизация линейной системы требует, чтобы система была динамически управляемой в течение некоторого периода времени [Turnovsky, 1977]. Условие полной управляемости системы гласит, что можно перевести систему из любого состояния в любое другое.
Теорема 2.1.2 (Условие динамической управляемости). Необходимое и достаточное условие динамической управляемости системы в течение некоторого периода времени
T≥g задается условием динамической управляемостиrank (B | AB |… | Ag − 1B) = gE6
Доказательство. В [Турновский, 1977], стр. 333-334.
Целевая функция (3) также может быть записана как
∑t = 1∞xt’M * xt + ∑t = 1∞vt’Nvt − θE7
, где θ включает тесто, andu’s beforet = 1. Полагая M˜ = M / mandN˜ = N / n, блочно-диагональная матрица M * определяется как
Задача стабилизации, (2) преобразуется в форму управления
minv (∑t = 1∞xt’M * xt + ∑t = 1∞vt’Nvt) stxt = Axt − 1 + BvtE8
Поскольку матрицы M * и N строго положительны, оптимальная политика существует и является уникальной.
2.1.3 Метод обратного рекурсивного разрешения
Пусть формальная задача стабилизации выражается с помощью детерминированной системы с дискретным временем
minx∑t = 1T (yt’Myt + xt’Nxt) MN≥0s.t.yt = Ayt −1 + BxtE9
В квадратичной функции затрат задачи вектор состояния и вектор управления x представляют собой отклонения от долгосрочных желаемых значений, положительные полуопределенные матрицы Mn × n и Nm × больше затрат имеют значения, отличные от желаемых целей. Ограничением задачи является динамическая система первого порядка [1] с матрицами коэффициентов An × n и Bn × m.Задача разработчика политики — стабилизировать систему, близкую к ее долгосрочному равновесию. Чтобы найти последовательность управляющих переменных, такую, что переменные состояния y t могут перемещаться от любого начального y0 к любому другому состоянию yT, динамически управляемое условие задается рангом объединенной матрицы, равным
rank (B | AB | … | An − 1B) = nE10
Решением является линейное управление с обратной связью, задаваемое формулой
xt = Rtyt − 1E11
, где мы имеем
Rt = — (N + B’StB) −1 (B’StA) E12
St − 1 = M + Rt’NRt + (A + BRt) ‘St (A + BRt) E13
ST = ME14
Затем определяется оптимальная политика в соответствии с обратной рекурсивной процедурой от конечного шагаT до начальных условий, таких как как
stepT: ST = MRT = — (N + B’STB) −1 (B’STA) E15
stepT-1: ST − 1 = M + RT’NRT + (A + BRT) ‘ST (A + BRT) RT − 1 = — (N + B’ST − 1B) −1 (B’ST − 1A) E16
шаг 1: S1 = M + R2’NR2 + (A + BR2) ‘S2 (A + BR2) R1 = — (N + B’S1B) −1 (B’S1A) E17
шаг 0: S0 = M + R1’NR1 + (A + BR1) ‘S1 (A + BR1) R0 = — (N + B’ S0B) −1 (B’S0A) E18
2.1.4 Задача стохастического управления
Некоррелированные мультипликативные и аддитивные шоки: Теперь динамическая система подвержена стохастическим возмущениям со случайными коэффициентами и случайными аддитивными членами каждого уравнения. Предполагается, что два набора переменных случайного отклонения не коррелированы. [1] —
Задача (3) преобразована к стохастической постановке (также [Турновский, 1977]).minxE [y′tMyt + x′tNxt] s.t.yt = (A + Φt) yt − 1 + (B + Ψt) xt + εtMN≥0E19
Матрицы констант An × nandBn × составляют детерминированную часть коэффициентов.Случайные компоненты коэффициентов представлены матрицами Φn × n и m × m. Более того, у нас есть стохастические предположения: элементы ϕijtψijtandεit одинаково и независимо распределены (i.i.d.) во времени с нулевым средним и конечными дисперсиями и ковариациями. Элементы Φt коррелированы с элементами Ψt, матрицы Φt и t не коррелированы с εt. Решением является линейное управление с обратной связью, задаваемое формулой
xt = Ryt − 1E20
[1] —
R = — (N + B’SB + E [Ψ’SΨ]) — 1 (B’SA + E [ Ψ’SΦ]) E21
R = — (N + B’SB + E [Ψ’SΨ]) — 1 (B’SA + E [Ψ’SΦ]) p = — (N + B’SB + E [Ψ’SΨ]) — 1 (B’k + E [Ψ’Sε]) E23
и S является положительным полуопределенным решением матричного уравненияS = M + R′NR + (A + BR) ′ S (A + BR) + E [(Φ + ΨR) ′ S (Φ + ΨR)] E25
Коррелированные мультипликативные и аддитивные шоки: Предположение о некорреляции в исходном уравнении уровней обязательно подразумевает корреляции в уравнении отклонений.Пусть исходная система задана по уровням стохастическим уравнением первого порядка
Yt = (A + Φt) Yt − 1 + (B + Ψt) Xt + εtE26
и стационарным уравнением
Y * = AY * + BX * E27
Вычитая эти два матричных уравнения и позволяя yt≡Yt − Y * иxt≡Xt − X *, мы получаем
yt = (A + Φt) yt − 1 + (B + Ψt) xt + εt’E28
, где аддитивное составное возмущение означает корреляцию между стохастической составляющей коэффициентов и аддитивным возмущением. Решение задачи стабилизации принимает такое же выражение, как и в некоррелированном случае.У нас есть решение
xt = Ryt − 1 + pE29
, где
и S — положительное полуопределенное решение матричного уравненияS = M + R’NR + (A + BR) ‘S (A + BR) + E [ (Φ + ΨR) ‘S (Φ + ΨR)] E30
и это решение матричного уравненияk = (A + BR)’ k + E [(Φ + ΨR) ‘Sε] E31
Тогда оптимальная политика состоит из компонента обратной связи R вместе с фиксированным компонентом p. Система будет колебаться около желаемых целей.
2.2 Стабилизация эмпирических стохастических систем
2.2.1 Базовая стохастическая модель мультипликатор-ускоритель
Структурная модель: Модель с дискретным временем состоит из двух уравнений, одно из которых является окончательной формой выходного уравнения, полученного из модели умножителя-ускорителя с аддитивными возмущениями другое — правило стабилизации [Howrey, 1967; Турновский, 1977]
Yt + bYt − 1 + cYt − 2 = Gt + εtGt = g1Yt − 1 + g2Yt − 2 + B¯E32
где Y обозначает общий выпуск, G, государственные расходы, ориентированные на стабилизацию, B¯a время, не зависящее от времени. для характеристики политики полной занятости [Howrey, 1967] и случайных нарушений (серийно независимых с нулевым средним, постоянной дисперсией) только от решений.Параметры политики: g1g2 и Y¯ — это уровень долгосрочного равновесия [1] -.
Временной ход вывода : Комбинируя два уравнения, мы получаем линейное стохастическое разностное уравнение второго порядка (SDE)
Yt + (b − g1) Yt − 1 + (c − g2) Yt − 2 = B¯ + εtE33
где B¯ — остаточное выражение. Если система устойчива [1] -, решение дается формулой
Yt = B¯1− (b − g1) — (c − g2) + (C1r1t + C2r2t) + ∑j = 0t − 1r1j + 1− r2j + 1r1 − r2εt − jt = 1,2E34
, где C1C2 — произвольные постоянные с заданными начальными условиями и r1r2 — корни характеристического уравнения: r1r2 = (- b ± b2−4c) / 2 Временной путь выхода представляет собой сумму трех членов, выражающие конкретное решение, переходный и случайный ответ соответственно.
2.2.2 Стабилизация модели
Локусы изо-дисперсии и изо частот: Упростим задачу до [Howrey, 1967]
Yt + bYt − 1 + cYt − 2 = At + εtE35
На рисунке 1 показаны изовариантные и изочастотные контуры вместе со стохастической реакцией на изменения параметров bandc. Попытки стабилизировать систему могут увеличить ее коэффициент дисперсии σy2 / σε2. Поскольку коэффициент остается постоянным, пик смещается на более высокую частоту.
Рисунок 1.
Контуры изодисперсии (a) и изочастот (b)
Асимптотическая дисперсия выходного сигнала: При выполнении условий устойчивости (характеристические корни лежат внутри единичной окружности в комплексной плоскости) переходная составляющая будет стремятся к нулю. Система будет колебаться около стационарного равновесия, а не сходиться к нему. Асимптотическая дисперсия выпуска равна
asyσy2 = 1 + c + g2 (1 − c − g2) ((1 + c + g2) 2− (b + g1) 2) σε2E36
Скорость сходимости: Передача функция (TF) процесса авторегрессии (4) имеет вид
T (ω) = (1 + be − iω + ce − i2ω) −1E37
Тогда мы имеем асимптотический спектр
| T (ω) | 2 = (1 + b2 + c2 + 2b (1 + c) cosω + 2ccos2ω) −1E38
Зависящие от времени спектры определяются как
| T (ωt) | 2 = ∑j = 0t − 1r1j + 1− r2j + 1r1 − r2e − ijωE39
В этом приложении параметры принимают значения b = −1.1, c = 0,5, σε2 = 1, как в [Howrey, 1967]. На рис. 2 показано, насколько быстро сходимость первых десяти лог-спектров к асимптотическому лог-спектру. [Nerlove et al., 1979].
Рисунок 2.
Сходимость к асимптотическому логарифмическому спектру
Оптимальная политика: Политики, минимизирующие асимптотическую дисперсию, таковы:
g1 * = — bandg2 * = — c. Тогда мы имеем Yt = Y¯ + εt иσy2 = σε2E40
Выходной сигнал будет колебаться около Y¯ с дисперсией σε2.
3. ПИД-регулирование динамических макроэкономических моделей
Задачи стабилизации рассматриваются с непрерывными во времени моделями мультипликатора-ускорителя: линейная модель колебаний Филлипса и нелинейная модель роста Гудвина [1] -.
3.1 Линейная модель Филлипса
3.1.1. Структурная форма модели Филлипса
Модель Филлипса [Phillips, 1954; Аллен, 1955; Филлипс, 1957; Турновский, 1974; Гандольфо, 1980; Shone, 2002] описывается системой непрерывного времени
Z (t) = C (t) + I (t) + G (t) (5) C (t) = cY (t) −u (t) (6) I˙ = −β (I (t) −vY˙) (7) Y˙ = −α (Y (t) −Z (t)) (8) E41
где I˙andY˙ обозначают первые производные wrt время переменных непрерывного времени I (t) и Y (t) соответственно. Все годовые переменные являются непрерывными дважды дифференцируемыми функциями времени, и все они измеряются в отклонениях от исходного равновесного значения.Совокупный спрос Z состоит из потребления, инвестиций и автономных расходов правительства, уравнение Джина (5). Потребление C зависит от дохода Y без задержки и нарушается самопроизвольным изменением при времени t = 0 в уравнении (6). Тогда переменная u (t) определяется ступенчатой функцией u (t) = 0, fort0andu (t) = 1fort≥1. Коэффициент — предельная склонность к потреблению. Уравнение (7) является линейным ускорителем инвестиций, где инвестиции связаны с изменением спроса. Коэффициент представляет собой коэффициент ускорения и обозначает скорость реакции инвестиций на изменения в производстве, постоянная времени задержки ускорения составляет β − 1 год.Уравнение (8) описывает непрерывную постепенную адаптацию производства к спросу. Скорость изменения производства в любой момент времени пропорциональна разнице между спросом и производством в этот момент. Коэффициент α — это скорость реакции производства на изменения спроса. Затем в этой модели используются простые экспоненциальные запаздывания [1] -.
3.1.2. Блок-схема модели Phillips
Блок-схема всей системы ввода-вывода (без настройки PID) показана на рисунке 3 с результатами моделирования.На рисунке 4. представлена блок-схема подсистемы линейного умножителя-ускорителя. Подсистема умножитель-ускоритель показывает две различные обратные связи: множитель и обратную связь ускорителя.
Рисунок 3.
Блок-схема системы и результаты моделирования
Рисунок 4.
Блок-схема подсистемы линейного умножителя-ускорителя
3.1.3. Системный анализ модели Филлипса
Преобразование Лапласа X (t) определяется как
X¯ (s) ≡L [X (t)] = ∫0∞e − stX (t) dtE42
Z¯ ( s) = C¯ (s) + I¯ (s) + G¯ (s) (9) C¯ (s) = cY¯ (s) (10) sI¯ (s) = — βI¯ (s) + βvsY¯ (s) (11) sY¯ (s) = — αY¯ (s) + αZ¯ (s) (12) E43
Опуская возмущение u (t), модель (5-8) преобразуется в
TF системы составляет
H (s) ≡Y¯ (s) G¯ (s) = α (s + β) s2 + (α (1 − c) + β − αβv) s + αβ (1− c) E44
Если взять временной лаг для единичных инвестиций с β = 1 вместе с α = 4, c = 34 и v = 35, мы имеем
H (s) = 20s + 15s2−2s + 5E45
Тогда константа TF равна 4 нуль равен ats = −1, а полюсы находятся в комплексно сопряженных элементах s =.2 ± j. ПФ системы также обозначается H (jω). Величина и фаза Боде, выраженные в децибелах20log10, нанесены на логарифмическую ось частот. Диаграмма Боде на рисунке 5 показывает низкочастотную асимптоту, резонансный пик и убывающую высокочастотную асимптоту. Частота перехода составляет 4 (рад / сек). Чтобы узнать, насколько частота будет сдвинута по фазе, фаза (в градусах) откладывается на логарифмической оси частот. Переход фазы близок к 1 (рад / сек). Когда ω изменяется, TF системы представлена на рисунке 5 диаграммой Найквиста на комплексной плоскости.
Ki = ∫0te (τ) dτE46
Рисунок 5.
Диаграмма Боде и диаграмма Найквиста передаточной функции
3.1.4 ПИД-регулирование модели Филлипса
Блок-схема замкнутой системы с настройкой ПИД-регулятора показан на рисунке 6. ПИД-регулятор на рисунке 7 вызывает три коэффициента. Пропорциональный коэффициент усиления Kpe (t) определяет реакцию на текущую ошибку. Интегральный коэффициент
реагирует на сумму прошлых ошибок. Производная GainKde˙ определяет реакцию на скорость изменения ошибки.ПИД-регулятор представляет собой взвешенную сумму трех действий. Большее значение Kp вызовет более быстрый отклик, и процесс будет колебаться и будет нестабильным при чрезмерном усилении. Большее значение K устраняет ошибки установившегося состояния. Большее значение Kd снижает выбросы [Braae & Rutherford, 1978 [1] — ПИД-регулятор также описывается следующим TF в непрерывной s-области [Cominos & Nunro, 2002]
HC (s) = Kp + Kis + sKdE47
Блок-схема ПИД-регулятора показана на рисунке 7.
Рисунок 6.
Структурная схема замкнутой системы
Рисунок 7.
Структурная схема ПИД-регулятора
3.2 Нелинейная модель Гудвина
3.2.1. Структурная форма модели Гудвина
Расширенная модель Гудвина [Goodwin, 1951; Аллен, 1955; Gabisch & Lorenz, 1989] — мультипликатор-ускоритель с нелинейным ускорителем. Система описывается системой непрерывного времени
Z (t) = C (t) + I (t) (13) C (t) = cY (t) −u (t) (14) I˙ = — β (I (t) −B (t)) (15) B (t) = Φ (vY˙) (16) Y˙ = −α (Y (t) −Z (t)) (17) E48
Уравнение совокупного спроса Zin (13) представляет собой сумму потребления C и общих инвестиций I [1] -.