что это такое, принцип работы, плюсы и минусы
ASR – что это такое в автомобиле, и как это работает?
Такое оснащение относят к активным системам безопасности. Главная задача системы полностью или насколько это возможно предотвратить возможность пробуксовки колес при прохождении зимней дороги, а также при поездке по грязевым проселочным дорогам. Именно пробуксовка часто становится причиной того, что водитель самостоятельно не может выехать, приходится обращаться к помощи трактора или водителей попутных авто.
Существует два основных принципа работы антипробуксовочной системы ASR:
- Первый сценарий запускается, если машина движется со скоростью до 60 км/ч. В этом случае подключенный к датчикам АСР насос с тормозной жидкостью быстро создает давление и притормаживает колесо, которое сорвалось в пробуксовку.
- Второй вариант работы включается при скорости выше 60 км/ч. В этой ситуации торможение может быть опасным, поэтому ASR подает сигналы через ЭБУ на двигатель и снижает крутящий момент.
 Это не всегда на 100% эффективно, но очень безопасно для водителя.
Это не всегда на 100% эффективно, но очень безопасно для водителя.
Бытует мнение, что разделение на два сценария произошло, чтобы сохранить колодки, которые могут перегреваться и даже выгорать на высокой скорости. Но производители заявляют, что на высоких скоростях просто нельзя инициировать торможение с одной стороны. Это может привести к заносу и только усложнит ситуацию для водителя на сложной дороге.
Система управляется датчиками, которые установлены на каждом ведущем колесе. На автомобилях с полным приводом оборудование АСР гораздо дороже и сложнее, здесь оно вносит свои преимущества в проходимость и безопасность поездки по бездорожью.
Плюсы и минусы антипробуксовочной системы автомобиля
Не позволяя ведущим колёсам буксовать, система даёт автомобилю, особенно с очень мощным двигателем, несколько полезных возможностей:
- уверенный старт с места в самом эффективном режиме, когда колёса постоянно поддерживаются на грани срыва;
- быстрый набор скорости, ограниченный только коэффициентом сцепления с дорогой, а не способностями водителя;
- уменьшенный износ покрышек на ведущих колёсах;
- повышение безопасности во время прохождения поворотов под тягой на скользкой дороге, система не даёт развернуть машину в неуправляемом заносе;
- экономится топливо, которое не расходуется на бесполезное сжигание резины шин во время пробуксовки на сухом асфальте;
- повышение проходимости, когда вращающемуся колесу не позволяется выкопать под собой яму, где и остаться до прибытия трактора, при этом второе колесо получит дополнительный крутящий момент, что позволит успешно выехать из грязевой засады внатяг.

Есть и недостатки, с которыми разработчики борются, не всегда успешно:
- увеличивается износ тормозных колодок и дисков;
- перегружается дифференциал автомобиля, не всегда рассчитанный на передачу значительной мощности только на одно колесо;
- трудности компромисса при выборе порога срабатывания системы, за которым она активно вмешивается в управление;
- трудности выборочного отключения, если на машине имеется большой набор дополнительных функций автономного управления тормозами и тягой.
В последнее время ASR почти не используется самостоятельно, а работает с другими электронными помощниками, например с системой стабилизации ESP.
ASR лучше или хуже традиционной системы ESP?
Проблема обозначений – это один из дьяволов современного автомобилестроения. Водители автомобилей Toyota могли с ухмылкой читать первую часть публикации, так как они знают, что антипробуксовочная система называется TRC (Traction Control), а другие автомобилисты даже нашли в документации к своей машине другие обозначения – TCS (Traction Control System), ETS, ASC и прочие аббревиатуры. В целом это обозначения одной и той же системы.
В целом это обозначения одной и той же системы.
ESP – это не просто антипробуксовочное оборудование. Это целый комплекс средств поддержания курсовой устойчивости, который включает такое оборудование:
- ASR или любой другой вид антипробуксовки из указанных выше вариантов названий;
- ABS – антиблокировочная система, которая снижает риски блокировки колес при торможении авто;
- MSR – также антиблокировочное оборудование, которое предотвращает блокировку колес при торможении двигателем;
- EBV – система для распределения тормозных усилий между всеми колесами вашего автомобиля.
В элитных авто можно найти еще десяток аббревиатур, которые называют системы безопасности и повышения контроля. Так что отличия ASR от ESP невозможно найти – это названия совершенно разных явлений в вашей машине. АСР является лишь частью комплекса ESP, обеспечивая один из факторов снижения риска заноса или закапывания в грязевой и снежной яме.
Обслуживание системы SRS
Система SRS частого обслуживания не требует, однако один раз в десять лет она должна проходить полную диагностику. После срабатывания подушек безопасности они подлежат полной замене, поскольку являются одноразовыми. При эксплуатации системы SRS необходимо следить, чтобы ее элементы (особенно датчики) не нагревались свыше +90 °С.
После срабатывания подушек безопасности они подлежат полной замене, поскольку являются одноразовыми. При эксплуатации системы SRS необходимо следить, чтобы ее элементы (особенно датчики) не нагревались свыше +90 °С.
Необходимо также помнить, что степень эффективности этой системы пассивной безопасности автомобиля во многом зависит от того, насколько правильно располагаются в его салоне водитель и пассажиры. Для нормальной работы ремней безопасности и активных подголовников необходимо, чтобы спинки сидений были наклонены на угол не более 25°. К тому же, сидения нельзя пододвигать чрезмерно близко к подушкам безопасности.
Есть ли явные преимущества от системы ASR?
Преимущества заключаются в том, что при поездке на рыбалку по проселочной грязной дороге вам не придется выходить из авто и толкать его, измазывая всю одежду. Как только колесо начинает прокручиваться, система включается в действие и практически блокирует его, позволяя другому ведущему колесу с более качественным сцеплением с поверхностью дороги вытащить машину.
Антипробуксовочная система ASR в недорогих автомобилях практически не устанавливается. Чаще всего это привилегия авто классом выше или более дорогой комплектации. Если у вас есть выбор, устанавливать ли АСР в машину, но за это нужно доплатить деньги, стоит выбирать вариант с установкой данного комплекса. Это повышение вашей уверенности и безопасности в эксплуатации. Уже первая зима на машине покажет, что вы приняли совершенно правильное решение.
Зачем нужна ASR
Аббревиатура ASR имеет немецкое происхождение и является сокращением длинного немецкого слова «Antriebsschlupfregelung», которое в дословном переводе означает «регулирование пробуксовывания». Ею обозначается электрогидравлическая система, предназначенная для предотвращения потери сцепления колес с дорожным покрытием. Впервые ASR в ее современном виде была применена в 1979 году на некоторых моделях автомобилей BMW, а самый первый ее вариант опробован в 1971 году на американских автомобилях Buick. Сейчас эта антипробуксовочная система используется всеми ведущими мировыми производителями автомобильной техники, которые называют ее по-разному, например, в машинах Toyota ее аналог именуется TRC, в Opel — DSA, в Range Rover — ETC, в Honda — TSC, в Volvo — STC.
По сути дела, ARS является «продвинутой» версией системы ABS: она не только полностью выполняет все ее функции, но и еще не позволяет ведущим колесам автомобиля пробуксовывать при интенсивном разгоне и трогании с места. Таким образом, при торможении ASR функционирует в качестве антиблокировочной системы тормозов (ABS), а во время движения действует как антипробуксовочная.
Есть ли недостатки у оборудования ASR в вашем авто?
Многие автомобилисты с опытом посмотрят, как работает система ASR, поймут ее примитивность и скажут, что смысла от нее никакого нет. Это справедливо только отчасти. Если вы опытный водитель с 20 годами стажа поездки по сложным дорогам, то и без такой помощи вряд ли застрянете в снежном плену. Но для владельцев авто с менее ярким опытом такие комплексы все же будут полезны.
Из недостатков стоит выделить лишь несколько особенностей:
- достаточно высокая стоимость, если на ваш автомобиль можно поставить такую систему опционально при заказе машины в салоне;
- не всегда эффективное срабатывание, очень часто АСР инициирует торможение слишком поздно, когда машина уже закопалась;
- неоднозначная работа на высоких скоростях, так как здесь это оборудование бессильно сделать что-либо эффективное;
- невозможность отключить на некоторых авто, которые не позволяют деактивировать весь модуль ESP;
- быстрый износ колодок, если вы постоянно ездите по сколькой или грязной дороге с риском срывания колес в пробуксовку.

ASR не будет оценивать, насколько опасная или безопасная пробуксовка на вашей машине. Она будет срабатывать в любой ситуации, когда датчики показывают буксующее колесо. Конечно, без отключения такой системы вы не сможете продемонстрировать навыки спортивной поездки, полицейских разворотов и красивого контролируемого заноса на снегу. АСР включится в самый ответственный момент и испортит ваш вираж.
Электронный контроль устойчивости (ESC/ESP)
Электронный контроль устойчивости или динамическая система стабилизации автомобиля, это компьютерная система управления, которая управляет не только каждым в отдельности тормозом колеса, но и способна одновременно с торможением уменьшать мощность двигателя, что обеспечивает контроль над управлением автомобилем.
Впервые система контроля устойчивости автомобиля была применена компанией Мерседес в середине 90-х годов. В 2012 году США обязала всех автопроизводителей продающие автомашины в Америке оснащать динамической системой стабилизации все транспортные средства, поступающие на рынок США. Это позволило существенно снизить аварийность на дорогах Соединенных штатов. По данным IIHS (Институт страховой безопасности дорожного движения США) после введения применения в новых автомобилях электронной системы стабилизации автомобиля, возможно, удалось предотвратить 30 процентов аварий на дорогах во всем мире.
Это позволило существенно снизить аварийность на дорогах Соединенных штатов. По данным IIHS (Институт страховой безопасности дорожного движения США) после введения применения в новых автомобилях электронной системы стабилизации автомобиля, возможно, удалось предотвратить 30 процентов аварий на дорогах во всем мире.
Технология ESC/ESP состоит из шести важных компонентов: датчиков скорости вращения колес, управляющего модуля, датчика определяющий угол движения автомобиля на дороге, датчика темпа отклонения от курса движения, акселерометра и гидравлического модулятора.
Обратите внимание, что гидравлический модулятор, который применяется в системе ESC, применяется точно такой же, как в системе ABS. Так что как видите, система ESC это усовершенствованная система ABS, в которую добавили датчик, следящий за отклонением курса движения машины, акселерометр и добавлен датчик контролирующий угол движения транспортного средства по дороге. . Чтобы понять, как работает система ESC/ESP, представим, что вы двигаетесь по шоссе на скорости 95 километров в час
Неожиданно на дорогу выбегает собака или любое другое животное. Вы, пытаясь уйти от удара, отклоняете руль в сторону. Что же происходит в этот момент в автомобиле, оборудованном системой курсовой устойчивости? Датчик темпа отклонения от курса движения определяет, по какой траектории двигается автомобиль
Вы, пытаясь уйти от удара, отклоняете руль в сторону. Что же происходит в этот момент в автомобиле, оборудованном системой курсовой устойчивости? Датчик темпа отклонения от курса движения определяет, по какой траектории двигается автомобиль
Чтобы понять, как работает система ESC/ESP, представим, что вы двигаетесь по шоссе на скорости 95 километров в час. Неожиданно на дорогу выбегает собака или любое другое животное. Вы, пытаясь уйти от удара, отклоняете руль в сторону. Что же происходит в этот момент в автомобиле, оборудованном системой курсовой устойчивости? Датчик темпа отклонения от курса движения определяет, по какой траектории двигается автомобиль.
Датчик, определяющий угол движения автомобиля передает системе данные о том, в каком положении находятся передние колеса. Акселерометр определяет, скользит ли Ваше транспортное средство, а датчики скорости точно также как в системе ABS определяют, и контролирую скорость вращения каждого колеса.
Если вы, чтобы уйти от удара, выкрутите рулевое колесо очень резко, то ваша машина не сразу начнет смещаться в сторону поворота руля, а короткое время будет по-прежнему двигаться прямо. Этот эффект происходит из-за первого закона Ньютона. Дело в том, что у передних колес, после того как вы слишком резко повернете руль, не будет хватать достаточно тяги, чтобы сохранить сцепление с дорогой, что в итоге приведет к скольжению передних колес и машина будет продолжать двигаться прямо.
Этот эффект происходит из-за первого закона Ньютона. Дело в том, что у передних колес, после того как вы слишком резко повернете руль, не будет хватать достаточно тяги, чтобы сохранить сцепление с дорогой, что в итоге приведет к скольжению передних колес и машина будет продолжать двигаться прямо.
В этом случае система курсовой устойчивости (ESC) придет на помощь. Управляющий электронный блок при такой ситуации получит несоответствие данных, получаемых с датчика замера угла движения автомобиля и фактическим движением машины (которое передается датчиком темпа отклонения от курса движения).
В результате такого несоответствия система посылает гидравлической системе команду увеличить силу торможения для заднего левого колеса или правого колеса (в зависимости от того, в какую сторону вы повернули рулевое колесо). Это позволяет избежать заноса из-за скольжения передних колес и выровнять машину. При необходимости система также может снизить мощность двигателя (снизить обороты) посылая сигнал на дроссель.
Если бы машина не оснащена системой динамической стабилизации, то тогда выкрутив резко руль в сторону, передние колеса начали бы скользить, а заднюю часть машины начало бы заносить в сторону. Так что система ESC/ESP контролирует устойчивость машины на дороге. Для того чтобы лучше понять, как работает динамическая система стабилизации автомобиля, посмотрите видео ниже:
Включите русские субтитры
Вот видео с передовом:
Еще один ролик, которые объясняет принцип работы системы ESP:
Итоги: как можно оценить работу ASR на автомобиле?
Сложно дать однозначную оценку данному комплексу систем безопасности. В составе ESP этот блок хорошо справляется с определенными нюансами на небольшой скорости. А вот при поездке по трассе АСР может даже помешать водителю своими силами исправить ситуацию. Неоднозначной является и польза подтормаживания колеса в процессе пробуксовки.
К сожалению, ASR – это не замена хорошей механической блокировке, так как электроника не может столь же эффективно распределить крутящий момент по всем ведущим колесам. Тем не менее, это выход для тех автомобилей, в которых никакой блокировки и быть не может. Если у вас есть выбор опциональной установки такой системы, то стоит воспользоваться таким предложением.
Тем не менее, это выход для тех автомобилей, в которых никакой блокировки и быть не может. Если у вас есть выбор опциональной установки такой системы, то стоит воспользоваться таким предложением.
Что такое DSC на Мазде
Название DSC – это аббревиатура от Dynamic Stability Control (досл. контроль динамической устойчивости). В официальных русифицированных руководствах от Mazda она определяется как противозаносная система – и такое название полностью отражает назначение DSC в автомобиле.
Данную систему можно считать результатом длительного развития ESP-устройств, которые являются первыми в истории автопрома системами курсовой устойчивости. И задачи нового поколения систем, используемых на Mazda, остались теми же:
- защита от срывов автомобиля в боковое скольжение;
- защита от заносов;
- предотвращение опрокидывания машины.
Для осуществления своих функций DSC-система использует широкий спектр показателей датчиков, что позволяет ей своевременно и точно регулировать интенсивность торможения, а также тягу, передаваемую на отдельные колеса.
В результате на любых дорожных покрытиях, в том числе и в сильный гололед, обеспечивается надежное сцепление и устойчивость, упрощается трогание с места и интенсивные ускорения. Также она предотвращает срыв колес в пробуксовку, если под ними покрытие с разными характеристиками.
Почему пробег по одометру не сходится со спутниковой навигацией GPS/ГЛОНАСС
Многие наши клиенты при списании топлива и закрытии путевых учетных листов техники задаются вопросом почему показания пробега по одометру транспортного средства расходиться с показаниями системы мониторинга и в некоторых случаях очень значительно. В интернете существует множество статей, на эту тему которые пытаются раскрыть этот вопрос. Но исчерпывающей информации представлено мало. Мы же решили разобраться полностью. Итак, начнем.
Измерение пробега с помощью одометров
Для полного понимания вопроса нужно иметь представление что такое одометр и как говорится «с чем его едят». Так вот одометр — это прибор для измерения пройденного пути транспортным средством. В подавляющем большинстве случаев исполняются в корпусе спидометра и являются полностью взаимозависимыми как конструктивно, так и по предоставляемым показаниям. Бортовые спидометры (одометры) всех видов не относятся к классу точных приборов. Для каждого вида данных устройств установлены допустимые погрешности. Данные погрешности установлены только для самих приборов. Все конструктивные изменения, а также физический износ некоторых узлов и агрегатов автомобиля в эту погрешность не включены. Так же по техническим требованиям ЕЭК ООН №39 спидометры не могут занижать показания. Средняя погрешность спидометра по этим правилам (ГОСТ Р 41.39-99) может быть только положительной и не превышать истинную скорость движения более чем на 10% + 6 км/ч. Поэтому и одометр, конструктивно связанный со спидометром, так же даёт завышенные показания.
В подавляющем большинстве случаев исполняются в корпусе спидометра и являются полностью взаимозависимыми как конструктивно, так и по предоставляемым показаниям. Бортовые спидометры (одометры) всех видов не относятся к классу точных приборов. Для каждого вида данных устройств установлены допустимые погрешности. Данные погрешности установлены только для самих приборов. Все конструктивные изменения, а также физический износ некоторых узлов и агрегатов автомобиля в эту погрешность не включены. Так же по техническим требованиям ЕЭК ООН №39 спидометры не могут занижать показания. Средняя погрешность спидометра по этим правилам (ГОСТ Р 41.39-99) может быть только положительной и не превышать истинную скорость движения более чем на 10% + 6 км/ч. Поэтому и одометр, конструктивно связанный со спидометром, так же даёт завышенные показания.
По нашему опыту работы, показания скорости и пробега приборов «с завода» по факту завышены на 5-10%. Об этом ведётся множество разговоров и бурные обсуждения на форумах автолюбителей. Возможно, что автопроизводители заботятся не только о безопасности водителей, но и вполне законно (опираясь на правила ЕЭК ООН №39) сокращают реальный гарантийный пробег на неизвестную величину, так как требования к точности измерения пробега отсутствуют.
Возможно, что автопроизводители заботятся не только о безопасности водителей, но и вполне законно (опираясь на правила ЕЭК ООН №39) сокращают реальный гарантийный пробег на неизвестную величину, так как требования к точности измерения пробега отсутствуют.
Несомненно, производители постоянно пытаются усовершенствовать приборы для повышения их точности. На протяжении времени спидометры автомобилей изменялись. Можно составить некую классификацию по их конструктивным особенностям: механические, электромеханические или электронные.
Механический одометр представляет собой счетчик, приводимый в движение гибким валом, а проще говоря тросиком от редуктора техники. При монтаже такого прибора измерения для каждой определенной модели выставляется передаточное число, по которому будет высчитываться скорость и пробег. По мимо собственной погрешности в 5% при общем износе редуктора техники погрешности могут превышать 10%. А средний срок службы некоторых спидометров по данным из руководств по эксплуатации, составляет 115 000 км.
Электромеханические одометры берут свои показания от электронного измерителя числа импульсов от датчика скорости, который в свою очередь электромеханическим путем считывает данные с коробки передач.
Рис.1 Одометр ВАЗ 2107
Действительно с приходом нового типа спидометров общая погрешность измерения скорости и пробега несколько снизилась, ведь они избавились лишь от нескольких слабых мест механической части, но все же погрешность большинства из них находится в пределах 5-7%. К тому же, например, в ТУ для электромеханических спидометров 56.3802 прямо прописаны дополнительные погрешности от изменения напряжения на спидометре +-2%, а от температуры +-3%. Таким образом стендовая допустимая погрешность 10% + 6 км/ч прирастает 2-3% в зависимости от условий эксплуатации.
Электронные одометры — следующая ступень развития приборостроения. Механический счетчик километража был заменен на жидкокристаллический дисплей. Вид спидометра стал намного более современным, но существенных изменений в части съёма показаний скорости и пройденного пути осталась практически на том же уровне.
Рис.2 Одометр Skoda Rapid
Принцип учета пройденного километража все так же зависим от механических частей транспортного средства. По нашему опыту при проведении калибровки тахографов на тестовом участке пути (на заводе-изготовителе эта процедура в принципе не происходит), погрешность данных устройств редко снижается ниже 5%. Но приятная глазу электронная часть принесла свои узкие места в надежность показаний одометра. При замене механической части на электронную появилась возможность программировать спидометры на накрутку километража причем на электронно строгое, точное значение, например, +10%. Такие услуги часто рекламируются на форумах водителей грузовиков.
Мы прекрасно видим, что изначально погрешности спидометров составляют довольно весомые величины, но на работу одометров так же влияют и другие факторы:
ü Радиус колеса. Визуально может показаться что колеса с разной размерностью шин, а тем более износом не отличаются друг от друга, но это не так. На грузовой технике согласно средним значениям высоты рисунка новой резины 18-23 мм и минимально разрешенной остаточной глубиной протектора в 1 мм вполне за период эксплуатации может образоваться разница более 1 см в радиусе одной и той же резины. Предлагаем посчитать с помощью нехитрой математики какую разницу по километражу будут показывать автомобили с использованием идеальных одометров без погрешностей о которых говорилось выше. Для примера мы взяли стандартное колесо Камаза с шиной КАМА 280 Р 508. Данные по расчетам приведены в таблице:
|
Маркировка |
Радиус колеса |
Кол-во оборотов |
Пройденное расстояние |
Разница в пробеге |
|
КАМА 280 Р 508 |
3,52 см |
28409 |
100 км |
0% |
|
КАМА 280 Р 508 |
3,39 см |
28409 |
96,3 км |
~ 3,5% |
Разница получается больше чем в 3,5 км на каждые 100 км пробега всего на 1 сантиметре разницы в радиусе колеса! Таким же образом на километраж и скорость повлияют изменения радиуса колеса и самих шин. А одометр калибруется под 1 определенный размер шин, дисков, и состояние износа. Представляете сколько лишних километров может привозить вам ваш автопарк?
А одометр калибруется под 1 определенный размер шин, дисков, и состояние износа. Представляете сколько лишних километров может привозить вам ваш автопарк?
-
Вес груза. Сюда же можно отнести влияние веса перевозимого груза изменяющего показатель диаметра колеса — при различной нагрузке автомобиля, шина проминается по-разному, поэтому изменяется диаметр колеса.
-
Давление в шинах. Очевидно, что давление воздуха в шинах так же окажет влияние на изменение диаметра колеса. К тому же резина достаточно зависима от температуры — при различных температурах пробеги будут разными.
-
Скольжение колес, пробуксовка или же скольжение, торможение на зимнем покрытии или в мокрую погоду очевидно вносить погрешность в показания пробега в неизвестную сторону. Так при вращении колес транспортное средство может не двигаться с места, а при блокировке тормозов двигаться – скользить по поверхности.

Проверка показаний одометра методом фиксированной дистанции
Что бы понять и измерить разницу погрешности одометров вашего транспортного средства вы можете самостоятельно произвести следующий тест. Выбирается участок дороги, размеченный километровыми знаками.
Рис.3 Знак 6.13 Километровый знак
Техника устанавливается у любого начального знака, одометр сбрасывается до нулевых показаний. Затем техника начинает движение по дороге и останавливается у любого последующего знака. Высокие погрешности будут видны уже на отрезке 10 км, чтобы уточнить их можно произвести тест на расстоянии до 100 км. После завершения намеченного пути достаточно рассчитать какое расстояние по километровым знакам проехал автомобиль и сравнить с показаниями одометра. По результатам вы сможете оценить величину погрешности одометра вашего транспортного средства.
Измерение пробега с помощью системы GPS/ГЛОНАСС мониторинга
Система мониторинга транспорта на основе спутниковой навигации может определять пройденное расстояние основываясь на данных из нескольких источников:-
На собственных геопозиционных данных.

-
Из сторонних источников на транспортном средстве. Такими источниками могут служить:
- CAN-шина автомобиля;
- Штатный одометр;
- Тахограф;
- Иные датчики и устройства.
Измерение пробега на основе данных GPS/ГЛОНАСС
Изначально стоит сказать о погрешности. В общем режиме гражданские модули GPS/ГЛОНАСС показывают так называемую чистую погрешность в пределах 2-5 метров в результате такая погрешность будет давать до 1,5 % разницы по пройденному километражу от истинного значения. Согласно данным Российской системы дифференциальной коррекции и мониторинга (СДКМ) точечные ошибки по позиционным данным составляют:
- По системе ГЛОНАСС 4-7 метров при видимом созвездии из 8 спутников;
- По системе GPS 4-7 метров при видимом созвездии из 10-11 спутников.
Помимо расположения объекта на плоскости системы глобального геопозиционирования также определяют и высоту объекта над уровнем моря – иными словами видят движение объекта в 3х плоскостях что практически полностью исключают погрешности при движении транспортного средства по местности с любым рельефом.
Таким образом объект на всем периоде эксплуатации в том числе в поездках высылает точные данные о своем местоположении и другую телеметрию в частности показания скорости, курса, высоту над уровнем моря, точного времени, а также показания точности данной точки. Такую информацию предоставляют ему высокоточные спутники находящиеся на орбите земли и своим распределенным местоположением образующие так называемое – созвездие. По полученными точками маршрута и рассчитывается километраж, пройденный транспортным средством. Остальные данные поступающие от спутников только ещё более уточняют его.
Измерение пробега на основе данных от других источников
В данном случае терминал служит только передаточным звеном между описанными датчиками в том числе одометрами и системой мониторинга. Учитывая механическую не совершенность приборов — источников данных, суммарная погрешность таких измерений оставляет желать лучшего.
Оценка расхождений
В рассмотренных методах измерения пробега автомобилей с помощью одометров очевидно, что различные электромеханические приборы имеют как собственные, так и наследуемые (от источников данных) погрешности. Достаточно широкая вариативность изделий не позволила решить основную проблему – механическую погрешность. Причем значение этих погрешностей велико особенно в расчете на экономическую составляющую любого бизнеса. Итогом таких погрешностей являются завышенные затраты на топливо и запчасти. Многокомпонентность погрешностей и их разнообразие не оставляют шансов взять ситуацию под контроль с помощью прямых действий, так придется затрачивать огромные усилия на выверку каждой единицы автопарка, а затем на частую поверку этих показаний.
Но для метода расчёта километража транспортных средств с помощью глобального позиционирования таких трудностей просто нет. GPS/ГЛОНАСС системы используют совершенно иной подход, который имеет как небольшую собственную погрешность, так и лишен погрешностей, обусловленных конструктивными особенностями транспортного средства. Ещё одним весомым плюсом применения спутниковой технологии является её защищенность. Если для воздействия на показания одометров существует огромное количество способов, то для системы мониторинга GPS/ГЛОНАСС они бездейственны.
Так же при необходимости в системе мониторинга реализована возможность учета километража сразу по нескольким показателям с последующим сравнением с фактом от навигационных данных.
Мы надеемся, что в своей статье смогли полно ответить на вопрос каким образом учитывать километраж транспортных средств и какой способ будет на порядок точнее. Если нет или же у вас возникли другие вопросы, необходимы уточнения, консультации по проведению замеров просим обраться к нам по форме обратной связи на сайте, электронной почте или телефону указанных в разделе контакты. Мы с удовольствием ответим Вам и по необходимости предоставим данные по контрольным замерам и поделимся богатым опытом работы в данной сфере.
Датчики Honeywell TARS-IMU для обнаружения пробуксовки колес Руководство пользователя
Датчики Honeywell TARS-IMU для обнаружения пробуксовки колес Руководство пользователя
проверка данных
В внедорожниках существует два типа контакта шин / колес / протектора с поверхностью. Во-первых, статическое содержимое возникает, когда шина / колесо / протектор и поверхность не скользят относительно друг друга. Во-вторых, существует динамический контакт, когда шина / колесо / протектор скользят относительно поверхности. Пробуксовка колеса происходит, когда сила, приложенная к шине / колесу / протектору, превышает доступное сцепление. Сила, прикладываемая к шине / колесу / протектору, действует в двух направлениях: продольном (сила, прилагаемая двигателем или тормозами для ускорения или замедления транспортного средства) и поперечной (сила, возникающая при изменении направления транспортного средства — обычно шины / колеса / протектор и поверхность обеспечивают поперечное усилие). Чтобы обеспечить безопасность оператора и транспортного средства, жизненно важно измерить продольные и поперечные силы на транспортном средстве, а также другие меры.
Во-первых, статическое содержимое возникает, когда шина / колесо / протектор и поверхность не скользят относительно друг друга. Во-вторых, существует динамический контакт, когда шина / колесо / протектор скользят относительно поверхности. Пробуксовка колеса происходит, когда сила, приложенная к шине / колесу / протектору, превышает доступное сцепление. Сила, прикладываемая к шине / колесу / протектору, действует в двух направлениях: продольном (сила, прилагаемая двигателем или тормозами для ускорения или замедления транспортного средства) и поперечной (сила, возникающая при изменении направления транспортного средства — обычно шины / колеса / протектор и поверхность обеспечивают поперечное усилие). Чтобы обеспечить безопасность оператора и транспортного средства, жизненно важно измерить продольные и поперечные силы на транспортном средстве, а также другие меры.
В нормальных рабочих условиях оператору иногда сложно определить, когда машина может находиться под нагрузкой и не может двигаться должным образом. Мощность этих машин в сочетании с небольшими размерами шин / колес / протекторов делает их уязвимыми для пробуксовки колес. Применение большей мощности к машине, которая не может двигаться вперед, приведет к тому, что колеса или гусеницы начнут вращаться на месте. Сама машина больше не движется, но ее колеса находятся в движении. Такое состояние может привести к повреждению самой машины из-за нагрузки на трансмиссию двигателя и трансмиссию, не говоря уже об износе шин или гусеницы. Еще одним недостатком этого условия проскальзывания является то, что шарнирно-сочлененное колесо может повредить рабочую площадку, что приведет к дополнительным затратам и времени.
Мощность этих машин в сочетании с небольшими размерами шин / колес / протекторов делает их уязвимыми для пробуксовки колес. Применение большей мощности к машине, которая не может двигаться вперед, приведет к тому, что колеса или гусеницы начнут вращаться на месте. Сама машина больше не движется, но ее колеса находятся в движении. Такое состояние может привести к повреждению самой машины из-за нагрузки на трансмиссию двигателя и трансмиссию, не говоря уже об износе шин или гусеницы. Еще одним недостатком этого условия проскальзывания является то, что шарнирно-сочлененное колесо может повредить рабочую площадку, что приведет к дополнительным затратам и времени.
Решения
Справочная система Honeywell Transportation Attitude Reference System, или TARSIMU, представляет собой упакованный массив датчиков, предназначенный для передачи данных об угловой скорости, ускорении и ориентации транспортного средства для требовательных приложений в таких отраслях, как тяжелые и внедорожные перевозки.
TARS-IMU обеспечивает характеристики автономных транспортных средств и повышает эффективность и производительность, предоставляя ключевые данные, необходимые для автоматизации и отслеживания перемещений систем и компонентов транспортных средств. Алгоритм объединения датчиков может быть настроен для конкретных приложений транспортного средства с помощью встроенного программного обеспечения на борту, что позволяет фильтровать данные о движении для посторонней среды и перемещений транспортного средства.
Датчики TARS могут использоваться для обнаружения пробуксовки колес и управления движением, а данные о движении от TARS-IMU могут помочь предотвратить пробуксовку ведущего колеса / гусеницы. Когда датчик TARS сообщает о движении, которое не соответствует ожидаемому, можно использовать электронное управление для ограничения.
Особенности и преимущества
- Повышенная производительность от IMU предлагает отчеты об угловой скорости, ускорении и наклоне транспортного средства (6 степеней свободы)
- Прочный корпус из термопласта PBT позволяет использовать его во многих требовательных приложениях и средах (сертифицированы по IP67 и IP69K)
- Расширенная фильтрация необработанных данных датчика для минимизации нежелательного шума и вибрации, повышая точность позиционирования
- Дополнительный металлический кожух для дополнительной защиты
- Поддерживает автомобильные системы питания от 5 В и от 9 до 36 В.
- Рабочая температура от -40 ° C до 85 ° C [от -40 ° F до 185 ° F]
- Пониженное энергопотребление
- Малый форм-фактор
Рисунок 1. Шесть степеней свободы TARS
отклик дроссельной заслонки и двигателя. Это может помочь предотвратить серьезное повреждение или разрушение ландшафтных или ранее обработанных поверхностей.
Датчик TARS-IMU может использоваться вместе с другими датчиками, такими как датчики скорости вращения колес, чтобы помочь обнаружить, исправить и минимизировать пробуксовку колес. Датчик Honeywell TARS-IMU может определять движение, вибрацию и положение автомобиля в реальном времени. В сочетании с данными других датчиков, IMU можно использовать для экстраполяции и определения того, что транспортное средство не движется, а его колеса вращаются.
Затем комплексная система может информировать оператора о состоянии или корректировать отключение питания транспортного средства в режиме реального времени, делая его более безопасным для работы и помогая снизить вероятность повреждения транспортного средства и предотвратить травмы оператора.
Эта помощь будет оказываться все чаще по мере того, как отрасль движется к некоторым полностью автономным системам. Датчик TARS-IMU является ключевым компонентом, поскольку он предоставляет и сообщает основные данные о транспортном средстве. Датчик TARS-IMU с шестью степенями свободы (см. Рис. 1) сообщает ключевые данные о движении, такие как угловая скорость, ускорение и наклон. Кроме того, TARS-IMU оснащен настраиваемыми фильтрами данных; его можно настроить для уменьшения постороннего шума и вибрации, которые в противном случае исказили бы ценные данные.
TARS-IMU использует прочную конструкцию корпуса (IP67 / IP69K), что делает его более устойчивым к суровым условиям строительной отрасли. Кроме того, широкий диапазон рабочих температур от -40 ° C до 85 ° C делает его готовым к использованию во многих требовательных инструментах и приспособлениях.
Рис. 2. Honeywell TARS-IMU в приложении для пробуксовки колес
ПРЕДУПРЕЖДЕНИЕ
НЕПРАВИЛЬНАЯ УСТАНОВКА
- При проектировании линии управления машиной, интерфейса и всех элементов управления, влияющих на безопасность, проконсультируйтесь с местными агентствами по безопасности и их требованиями.

- Строго соблюдайте все инструкции по установке.
Несоблюдение этих инструкций может привести к смерти или серьезным травмам.
Гарантия / средство правовой защиты
Honeywell гарантирует, что в товарах своего производства отсутствуют дефектные материалы и дефекты изготовления. Стандартная гарантия на продукцию Honeywell применяется, если иное не согласовано с Honeywell в письменной форме; Пожалуйста, обратитесь к подтверждению вашего заказа или проконсультируйтесь с вашим местным торговым представительством для уточнения деталей гарантии. Если гарантийные товары будут возвращены Honeywell в течение периода действия гарантии, Honeywell отремонтирует или заменит, по своему усмотрению, бесплатно те товары, которые Honeywell по своему собственному усмотрению сочтет дефектными. Вышеизложенное является единственным средством правовой защиты покупателя и заменяет все другие гарантии, явные или подразумеваемые, включая гарантии товарной пригодности и пригодности для определенной цели. Ни при каких обстоятельствах Honeywell не несет ответственности за косвенные, особые или косвенные убытки.
Ни при каких обстоятельствах Honeywell не несет ответственности за косвенные, особые или косвенные убытки.
В то время как Honeywell может оказать помощь в применении лично, используя нашу литературу и Honeywell webсайта, ответственность за определение пригодности продукта для приложения лежит исключительно на заказчике.
Технические характеристики могут быть изменены без предварительного уведомления. Информация, которую мы предоставляем, считается точной и надежной на момент публикации. Однако Honeywell не несет ответственности за его использование.
Чтобы получить больше информации
Чтобы узнать больше о Honeywell
чувствительные и переключающие продукты,
звоните 1-800-537-6945, заходите sps.honeywell.com/ast
или отправьте запрос по электронной почте [электронная почта защищена]
Передовые сенсорные технологии Honeywell
830 Ист-Арапахо-роуд
Ричардсон, Техас 75081
sps.honeywell.com/ast
000837-2-EN | 2 | 05
© Honeywell International Inc. , 2021.
, 2021.
Узнать больше об этом руководстве и скачать PDF:
Документы / Ресурсы
Рекомендации
- Продукты — Передовые сенсорные технологии | Honeywell LinkedIn Facebook Twitter YouTube
Оценка и классификация проскальзывания мобильного робота с помощью встроенного датчика в песчаной местности — Университет Кейо
Песчаная местность часто задерживает колесное транспортное средство или мобильный робот с блокирующим колесом. Явление прихвата колеса тесно связано с проскальзыванием колеса и разрушением грунта. Следовательно, обнаружение и оценка проскальзывания колес особенно важны для предотвращения явления заедания колеса. В этой статье предлагается метод, который может оценить и классифицировать величину проскальзывания колес с помощью системы датчиков в колесе. Датчик в колесе фиксирует характеристики взаимодействия колеса с землей, такие как углы контакта и нормальная сила, действующая на колесо. Предлагаемый метод в основном оценивает проскальзывание колеса путем сравнения измеренных данных от датчика в колесе с таблицей соответствия, созданной алгоритмом машинного обучения. Обучающие данные для машинного обучения представляют собой набор экспериментальных данных, полученных от датчика в колесе. Справочная таблица, разработанная в этой работе, различает величину проскальзывания колеса по трем категориям: незаклинившее колесо, квазизаклинившее колесо и застрявшее колесо. Экспериментальная демонстрация предлагаемого метода обеспечивает оценку проскальзывания с точностью 90 % и более. Более того, обнаружено, что отслеживание характеристик взаимодействия в пространственно-временном плане может предсказать блокирующее проскальзывание колеса или даже заклинивание колеса, что приводит к снижению опасности подвижности.
Датчик в колесе фиксирует характеристики взаимодействия колеса с землей, такие как углы контакта и нормальная сила, действующая на колесо. Предлагаемый метод в основном оценивает проскальзывание колеса путем сравнения измеренных данных от датчика в колесе с таблицей соответствия, созданной алгоритмом машинного обучения. Обучающие данные для машинного обучения представляют собой набор экспериментальных данных, полученных от датчика в колесе. Справочная таблица, разработанная в этой работе, различает величину проскальзывания колеса по трем категориям: незаклинившее колесо, квазизаклинившее колесо и застрявшее колесо. Экспериментальная демонстрация предлагаемого метода обеспечивает оценку проскальзывания с точностью 90 % и более. Более того, обнаружено, что отслеживание характеристик взаимодействия в пространственно-временном плане может предсказать блокирующее проскальзывание колеса или даже заклинивание колеса, что приводит к снижению опасности подвижности.
| Оригинал языка | английский |
|---|---|
| Название о публикации принимающих ведущих | 19-й международный и 14-й европейский региональный конференция ISTVS |
| Издательство | Международное общество для Farrain-Vehicle. 0011 0011 |
| ISBN (электронный) | 9781942112495 |
| Статус публикации | Опубликовано-2017 январь 1 |
| Событие | 19th IspersiS-ViShips. 2017 — Будапешт, Венгрия Продолжительность: 25 сентября 2017 → 27 сентября 2017 |
| Другое0011 | |
|---|---|
| Страна/Территория | Венгрия |
| Город | Будапешт |
| ПЕРИОД | 17/9/25 → 17/9/27 |
- 9/27. машина
- Классификация проскальзывания колес
- Взаимодействие колеса с грунтом
- Автомобилестроение
- АПА
- Стандарт
- Гарвард
- Ванкувер
- Автор
- БИБТЕКС
- РИС
Omura, T & Ishigami, G 2017, Оценка и классификация проскальзывания с использованием датчика в колесе для мобильного робота на песчаной местности. в 19-я Международная и 14-я Европейско-Африканская региональная конференция ISTVS. Международное общество систем вездеходов, 19-я Международная и 14-я Европейско-Африканская региональная конференция Международного общества вездеходов, ISTVS 2017, Будапешт, Венгрия, 17.09.25.
в 19-я Международная и 14-я Европейско-Африканская региональная конференция ISTVS. Международное общество систем вездеходов, 19-я Международная и 14-я Европейско-Африканская региональная конференция Международного общества вездеходов, ISTVS 2017, Будапешт, Венгрия, 17.09.25.
@inproceedings{e499b25009da4b34904b1fd8c3713290,
title = «Оценка и классификация проскальзывания мобильного робота с помощью встроенного датчика в песчаной местности»,
abstract = «Песчаная местность часто задерживает колесное транспортное средство или мобильный робот с иммобилизующим колесом. Колесо застревает. Явление прихвата тесно связано с проскальзыванием колеса и разрушением грунта. Поэтому обнаружение и оценка проскальзывания колеса особенно важны для предотвращения явления заедания колеса. В этой статье предлагается метод, который может оценить и классифицировать величину проскальзывания колеса с помощью датчика в колесе. Датчик в колесе фиксирует характеристики взаимодействия колеса с поверхностью, такие как углы контакта и нормальная сила вокруг колеса. Предложенный метод в основном оценивает проскальзывание колеса путем сравнения измеренных данных от датчика в колесе с созданной справочной таблицей. алгоритмом машинного обучения.Обучающие данные для машинного обучения представляют собой множество экспериментальных данных, полученных из датчик в колесе. Справочная таблица, разработанная в этой работе, различает величину проскальзывания колеса по трем категориям: незаклинившее колесо, квазизаклинившее колесо и застрявшее колесо. Экспериментальная демонстрация предлагаемого метода обеспечивает оценку проскальзывания с точностью 90 % и более. Кроме того, было обнаружено, что отслеживание характеристик взаимодействия в пространственно-временном плане может предсказать блокирующее проскальзывание колеса или даже заклинивание колеса, что приводит к снижению опасности подвижности.»,
Предложенный метод в основном оценивает проскальзывание колеса путем сравнения измеренных данных от датчика в колесе с созданной справочной таблицей. алгоритмом машинного обучения.Обучающие данные для машинного обучения представляют собой множество экспериментальных данных, полученных из датчик в колесе. Справочная таблица, разработанная в этой работе, различает величину проскальзывания колеса по трем категориям: незаклинившее колесо, квазизаклинившее колесо и застрявшее колесо. Экспериментальная демонстрация предлагаемого метода обеспечивает оценку проскальзывания с точностью 90 % и более. Кроме того, было обнаружено, что отслеживание характеристик взаимодействия в пространственно-временном плане может предсказать блокирующее проскальзывание колеса или даже заклинивание колеса, что приводит к снижению опасности подвижности.»,
ключевых слов = «Колесный датчик, Метод опорных векторов, Колесо классификация проскальзывания, взаимодействие колеса с грунтом»,
автор = «Такуя Омура и Генья Исигами»,
год = «2017»,
месяц = январь,
день = «1»,
язык = «английский» ,
booktitle = «19-я Международная и 14-я Европейско-Африканская региональная конференция ISTVS»,
издатель = «Международное общество систем наземных транспортных средств»,
примечание = «19-я Международная и 14-я Европейско-африканская региональная конференция Международного Общество вездеходных транспортных средств, ISTVS 2017; Дата проведения конференции: с 25 сентября 2017 г. по 27 сентября 2017 г.»,
по 27 сентября 2017 г.»,
}
TY — GEN
T1 — Оценка и классификация проскальзывания с использованием датчика в колесе для мобильного робота в песчаная местность
AU — Omura, Takuya
AU — Ishigami, Genya
PY — 2017/1/1
Y1 — 2017/1/1
N2 — Песчаная местность часто является ловушкой для колесной техники или мобильного робота с застрявшим колесом. Явление прихвата колеса тесно связано с проскальзыванием колеса и разрушением грунта. Следовательно, обнаружение и оценка проскальзывания колес особенно важны для предотвращения явления заедания колеса. В этой статье предлагается метод, который может оценить и классифицировать величину проскальзывания колес с помощью системы датчиков в колесе. Датчик в колесе фиксирует характеристики взаимодействия колеса с землей, такие как углы контакта и нормальная сила, действующая на колесо. Предлагаемый метод в основном оценивает проскальзывание колеса путем сравнения измеренных данных от датчика в колесе с таблицей соответствия, созданной алгоритмом машинного обучения. Обучающие данные для машинного обучения представляют собой набор экспериментальных данных, полученных от датчика в колесе. Справочная таблица, разработанная в этой работе, различает величину проскальзывания колеса по трем категориям: незаклинившее колесо, квазизаклинившее колесо и застрявшее колесо. Экспериментальная демонстрация предлагаемого метода обеспечивает оценку проскальзывания с точностью 90 % и более. Более того, обнаружено, что отслеживание характеристик взаимодействия в пространственно-временном плане может предсказать блокирующее проскальзывание колеса или даже заклинивание колеса, что приводит к снижению опасности подвижности.
Обучающие данные для машинного обучения представляют собой набор экспериментальных данных, полученных от датчика в колесе. Справочная таблица, разработанная в этой работе, различает величину проскальзывания колеса по трем категориям: незаклинившее колесо, квазизаклинившее колесо и застрявшее колесо. Экспериментальная демонстрация предлагаемого метода обеспечивает оценку проскальзывания с точностью 90 % и более. Более того, обнаружено, что отслеживание характеристик взаимодействия в пространственно-временном плане может предсказать блокирующее проскальзывание колеса или даже заклинивание колеса, что приводит к снижению опасности подвижности.
AB — Песчаная местность часто задерживает колесный транспорт или мобильный робот с застрявшим колесом. Явление прихвата колеса тесно связано с проскальзыванием колеса и разрушением грунта. Следовательно, обнаружение и оценка проскальзывания колес особенно важны для предотвращения явления заедания колеса. В этой статье предлагается метод, который может оценить и классифицировать величину проскальзывания колес с помощью системы датчиков в колесе. Датчик в колесе фиксирует характеристики взаимодействия колеса с землей, такие как углы контакта и нормальная сила, действующая на колесо. Предлагаемый метод в основном оценивает проскальзывание колеса путем сравнения измеренных данных от датчика в колесе с таблицей соответствия, созданной алгоритмом машинного обучения. Обучающие данные для машинного обучения представляют собой набор экспериментальных данных, полученных от датчика в колесе. Справочная таблица, разработанная в этой работе, различает величину проскальзывания колеса по трем категориям: незаклинившее колесо, квазизаклинившее колесо и застрявшее колесо. Экспериментальная демонстрация предлагаемого метода обеспечивает оценку проскальзывания с точностью 90 % и более. Более того, обнаружено, что отслеживание характеристик взаимодействия в пространственно-временном плане может предсказать блокирующее проскальзывание колеса или даже заклинивание колеса, что приводит к снижению опасности подвижности.
Датчик в колесе фиксирует характеристики взаимодействия колеса с землей, такие как углы контакта и нормальная сила, действующая на колесо. Предлагаемый метод в основном оценивает проскальзывание колеса путем сравнения измеренных данных от датчика в колесе с таблицей соответствия, созданной алгоритмом машинного обучения. Обучающие данные для машинного обучения представляют собой набор экспериментальных данных, полученных от датчика в колесе. Справочная таблица, разработанная в этой работе, различает величину проскальзывания колеса по трем категориям: незаклинившее колесо, квазизаклинившее колесо и застрявшее колесо. Экспериментальная демонстрация предлагаемого метода обеспечивает оценку проскальзывания с точностью 90 % и более. Более того, обнаружено, что отслеживание характеристик взаимодействия в пространственно-временном плане может предсказать блокирующее проскальзывание колеса или даже заклинивание колеса, что приводит к снижению опасности подвижности.
KW — Датчик в колесе
KW — Машина опорных векторов
KW — Классификация пробуксовки колес
KW — Взаимодействие колеса с грунтом
UR — http://www.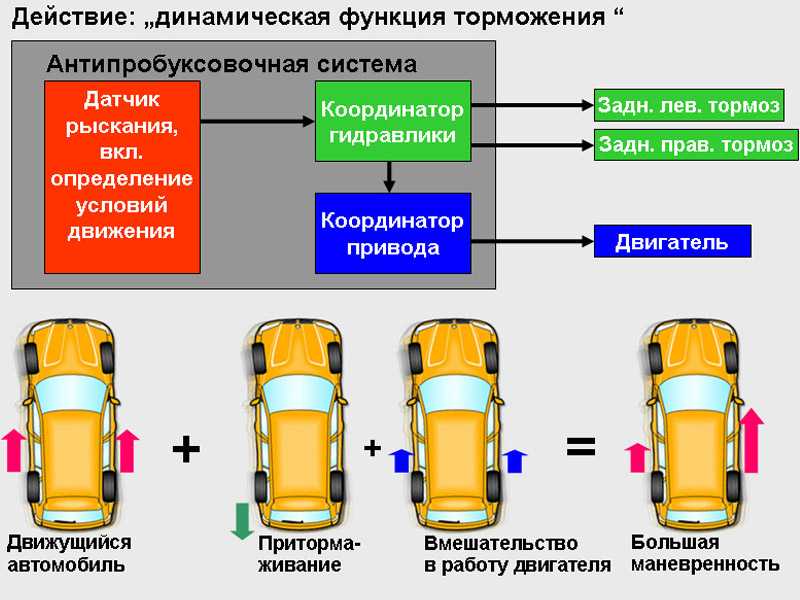 scopus.com/inward/record.url? scp=85040257900&partnerID=8YFLogxK
scopus.com/inward/record.url? scp=85040257900&partnerID=8YFLogxK
UR – http://www.scopus.com/inward/citedby.url?scp=85040257900&partnerID=8YFLogxK
M3 – Вклад конференции
AN – SCOPUS:85040257900
BT – 19-я Международная и 14-я Европейско-Африканская региональная конференция ISTVS 14-я Европейско-африканская региональная конференция Международного общества вездеходов, ISTVS 2017
Y2 — с 25 сентября 2017 г. по 27 сентября 2017 г.
ER —
[PDF] Обнаружение проскальзывания колес на основе классификации и объединение детекторов для мобильных роботов на открытой местности
- title={Обнаружение проскальзывания колес на основе классификации и объединение детекторов для мобильных роботов на открытой местности},
автор = {Карл Ягнемма и Крис С. Уорд},
журнал={Автономные роботы},
год = {2009},
объем = {26},
страницы = {33-46}
}
- K.
 Iagnemma, Chris C. Ward
Iagnemma, Chris C. Ward - Опубликовано в 2009 г.
- Engineering
- Автономные роботы
В этом документе представлен подход, основанный на распознавании сигналов, для обнаружения обездвиживания автономного мобильного робота на открытой местности. [] Ключевой метод Предложенный алгоритм проверен с использованием экспериментальных данных, собранных с помощью автономного робота, работающего на открытом воздухе. Кроме того, предлагается метод объединения двух детекторов для объединения выходных сигналов нескольких иммобилизационных детекторов. Предлагается один метод для минимизации ложных обнаружений иммобилизации.
Посмотреть на Springer
web.mit.edu
Обнаружение неисправностей сервисных мобильных роботов с использованием модельного метода
- Д. Ставру, Д. Элиадес, К. Панайоту, М. Поликарпу
Инженерия, Компьютер Наука
Автон. Роботы
- 2016
В этой работе используется основанный на модели подход к обнаружению и идентификации неисправностей приводов мобильных роботов с дифференциальным приводом в помещении, и предлагается расширение метода, которое решает проблему обнаружения небольших неисправностей.

Определение характеристик мобильности автономных мобильных роботов с использованием машинного обучения
- Эрик Траутманн, Л. Рэй
Информатика
Auton. Роботы
- 2011
Подход к обучению с учителем для улучшения автономной мобильности колесных роботов путем определения взаимодействия робота с землей «под ногами», который показывает, что Yeti может постоянно обнаруживать условия, предшествующие иммобилизации, вовремя останавливаться, чтобы избежать необратимой иммобилизации , определите особенность местности, представляющую проблему мобильности, и выполните последовательность эвакуации, чтобы отступить от условия.
Система обучения навигации мобильного робота в гетерогенной среде: метод индуктивного моделирования
- Андраханов А.В., Беляев А.В.
- 2017
В работе представлены результаты обучения моделей для оценки координат и угловой ориентации робота в неоднородной среде и свидетельство эффективности разработанной системы навигационного обучения мобильного робота (NLS MR).

Основы и методы классификации местности с использованием проприоцептивных датчиков
- Г. Эммануэль, Э. Койл
Информатика
- 2010
В данной диссертации подробно описывается классификация местности, включая проприоцептивные датчики многие из них сосредоточены на личных исследованиях автора, чтобы лучше понять, как автоматическая классификация местности может быть реализована на AGV.
Управление внедорожными мобильными роботами с помощью визуальной одометрии и компенсации скольжения
- Р. Гонсалес, Ф. Родригес, Х. Л. Гусман, К. Прадалье, Р. Сигварт
Инженерное дело
Доп. Робототехника
- 2013
Резюме В этой статье с помощью физических экспериментов оценивается навигационная архитектура для внедорожных мобильных роботов. Он был реализован с учетом недорогих компонентов и вычислительных…
Оценка пробуксовки колес планетохода с помощью машинного обучения без учителя
Самоорганизующиеся карты демонстрируют наилучшую точность классификации скольжения, достигая 97% обнаружения иммобилизации в идеальном двухклассовом случае, а анализ важных параметров для настройки алгоритма показывает выигрыш в точности до 25 %, а неправильная классификация может быть дальнейшее сокращение за счет изменения границ классов.

Классификация местности с использованием датчиков ToF для повышения проходимости сельскохозяйственной техники
- Франсиско Яндун Нарваес, Э. Грегорио, А. Эскола, Дж. Р. Розелл-Поло, М. Торрес-Торрити, Ф. А. Чеин
Environmental Science
- 2018
Slippage and immobilization detection for planetary exploration rovers via machine learning and proprioceptive sensing
- Ramón González, D. Apostolopoulos, K. Iagnemma
Computer Science
J. Field Robotics
- 2018
В этом документе рассматривается наиболее удобное размещение датчиков IMU на шасси ровера, обеспечивающее максимальное обнаружение проскальзывания, и демонстрируется правильный баланс между преимуществами алгоритмов обучения с учителем и преимуществами методов обучения без учителя.
Прилип к характеристикам местности для оценки позиции мобильных роботов
- M.
 Brunner, D. Schulz, A. Cremers
Brunner, D. Schulz, A. Cremers Компьютерная наука
Icinco
- 2010
. Эта бумага представляет собой комплексный. функция наружной кинематики для мобильных роботов с использованием регрессии гауссовского процесса (GPR) в сочетании с фильтром Калмана без запаха (UKF).
Обновление режимов управления на основе классификации местности
Представлено упрощенное правило, которое решает, когда менять режимы управления на основе прошлых и настоящих классификаций рельефа, и настраивается с использованием эмпирических данных, а также разрабатывает и реализует метод скользящего горизонта для классификации рельефа на основе реакции для повышения чувствительности к переходам ландшафта.
ПОКАЗАНЫ 1–10 ИЗ 43 ССЫЛОК
СОРТИРОВАТЬ ПОРелевантности Наиболее влиятельные документыНедавность
Детектор проскальзывания колес на основе динамической модели для мобильных роботов на открытой местности
Экспериментальные результаты показывают, что метод точно и быстро определяет условия иммобилизации робота, обеспечивая при этом оценку скорости робота при обычном вождении, указывая на то, что алгоритм применим как для наземных приложений, так и для космической робототехники.

Обнаружение проскальзывания на основе тока и коррекция одометрии для мобильных роботов и планетоходов
В этом документе представлен новый метод обнаружения и коррекции проскальзывания колес на основе измерений тока двигателя и соответствующей корректировки показаний энкодера, на которые влияет проскальзывание колес.
Эффективное обнаружение сбоев на мобильных роботах с использованием фильтров частиц с гауссовыми предложениями процесса
- Христианский Плагеманн, Д. Фокс, В. Бургард
Компьютерная наука
IJCAI
- 2007
- K.
Классификация местности на основе вибрации для планетарных исследовательских вездеходов
Метод классификации местности на основе вибраций, вызываемых в конструкции вездехода взаимодействием колеса с землей во время движения, который устойчив к изменениям освещения и был экспериментально подтвержден на лабораторном испытательном стенде и на четырехколесном вездеходе в уличных условиях.
Автономный монокуляр для обнаружения дорог в пустынной местности
Этот метод определения проезжей части в сложных грунтовых условиях и условиях бездорожья, применяемый в гонке роботов DARPA Grand Challenge, обеспечивает надежность за счет объединения информации датчиков от лазерного дальномера и оценки положения система и цветная камера.
Понимание местности для роботизированной навигации
Таким образом, эта методология позволит онлайн-прогнозировать характеристики транспортных средств в зависимости от предстоящей проходимости местности на основе визуального внешнего вида, используя нечеткую кластеризацию c-средних и исследуя ряд различных функций для характеристики визуального внешнего вида местности.
Счисление пути для лунохода на неровной местности
Дополнительный фильтр Калмана объединяет данные акселерометра и гироскопа скорости для повышения точности счисления пути на неровной местности и представляет эмпирические демонстрации эффективности нового метода с мобильным роботом. проходит по земле кратера.
проходит по земле кратера.
Инерциальные навигационные системы для мобильных роботов
Описывается недорогая твердотельная инерциальная навигационная система (ИНС) для приложений мобильной робототехники. Модели ошибок для инерциальных датчиков генерируются и включаются в расширенный фильтр Калмана…
Высокоточная оценка состояния дорожного транспортного средства с использованием расширенного фильтра Калмана
В данной статье описывается теоретическая разработка и оценка мультисенсорной навигационной системы для высокоскоростного дорожного транспортного средства. В статье основное внимание уделяется разработке нелинейной модели процесса, которая…
Использование недорогого бесплатформенного инерциального измерительного устройства с использованием ограничений модели транспортного средства для наземных транспортных средств
- Г. Диссанаяке, С. Суккари, Э. Небот, Х. Даррант-Уайт
Инженерное дело
IEEE Trans. Робототехника Автомат.

- 2001
Алгоритм использует неголономные ограничения, которые управляют движением транспортного средства на поверхности, для получения измерений скорости, которые помогают в оценке выравнивания IMU, а также скорости движения транспортного средства.
Полный привод i-ACTIV | Mazda Central
Перейти к основному содержанию- Отдел продаж: (512) 459-4111
- Служба поддержки: (512) 459-4222
- Запчасти: (512) 459-4111
6825 Бернет-роуд Направления Остин, Техас 78757
Скрыть Показать
Независимо от того, едете ли вы по шоссе темной и дождливой ночью или едете по заснеженной горной дороге, система полного привода Mazda нового поколения обеспечивает безопасность и комфорт при одновременном снижении расхода топлива. Наши инженеры полностью переработали аппаратное и программное обеспечение системы и, применяя упреждающий подход к управлению приводом на все четыре колеса, разработали i-ACTIV AWD, полностью автономную систему полного привода, которая сочетает в себе отличные внедорожные качества с выдающейся экономией топлива.
Наши инженеры полностью переработали аппаратное и программное обеспечение системы и, применяя упреждающий подход к управлению приводом на все четыре колеса, разработали i-ACTIV AWD, полностью автономную систему полного привода, которая сочетает в себе отличные внедорожные качества с выдающейся экономией топлива.
Крутящий момент автоматически распределяется между передними и задними колесами
i-ACTIV AWD постоянно отслеживает дорожные условия в режиме реального времени и следит за малейшими изменениями скорости вращения колес, которые водитель никогда не заметит. Проактивно контролируя распределение крутящего момента, которое может варьироваться от полного переднего привода до полного привода на 4 колеса, система не только обеспечивает надежную и предсказуемую управляемость на любых дорогах, но и делает вождение на плохих дорожных покрытиях более эффективным для всех. но устраняя расточительное проскальзывание шин.
Используя различные датчики для создания точной картины общей картины вождения, включая дорожные условия и намерения водителя, i-ACTIV постоянно рассчитывает и регулирует величину крутящего момента, передаваемого на задние колеса. Это обеспечивает безопасный взлет, ускорение, прохождение поворотов и торможение без проскальзывания шин в любом направлении — вперед, назад или вбок. Система минимизирует крутящий момент, передаваемый на задние колеса при движении по сухой дороге с хорошим сцеплением. В таком состоянии автомобиль работает практически как переднеприводный, что способствует большой экономии топлива.
Это обеспечивает безопасный взлет, ускорение, прохождение поворотов и торможение без проскальзывания шин в любом направлении — вперед, назад или вбок. Система минимизирует крутящий момент, передаваемый на задние колеса при движении по сухой дороге с хорошим сцеплением. В таком состоянии автомобиль работает практически как переднеприводный, что способствует большой экономии топлива.
Что наблюдают датчики?
Система знает, что хочет сделать водитель, отслеживая такие факторы, как положение акселератора (водитель хочет начать движение или ускориться), угол поворота руля (водитель намеревается повернуть) и давление тормозной жидкости (водитель хочет остановиться) . Он понимает состояние дорожного покрытия, наблюдая за широким спектром факторов: идет ли дождь или снег? Достаточно ли холодно, чтобы замерзнуть? i-ACTIV AWD узнает об этом, наблюдая за дворниками и указателем внешней температуры. Он также может измерять, насколько скользко дорожное покрытие, сравнивая крутящий момент рулевого управления с величиной тока, протекающего через электроусилитель рулевого управления, и уклоном любого склона по степени ускорения. Кроме того, система точно измеряет скорость всех четырех колес и обнаруживает предупреждающие знаки, указывающие на опасность проскальзывания колес. Наряду с движущей силой двигателя (приложенной к передним колесам) это используется для понимания условий движения.
Кроме того, система точно измеряет скорость всех четырех колес и обнаруживает предупреждающие знаки, указывающие на опасность проскальзывания колес. Наряду с движущей силой двигателя (приложенной к передним колесам) это используется для понимания условий движения.
Идеальное количество крутящего момента рассчитывается и мгновенно передается на задние колеса
Модуль управления полным приводом анализирует данные от многих сенсорных модулей для анализа намерений водителя и дорожных условий, вычисляет, какой крутящий момент должен передаваться на задние колеса колеса, чтобы предотвратить проскальзывание передних колес, и почти мгновенно отправляет команду на соединительный блок полного привода, чтобы передать соответствующую движущую силу на заднюю часть.
Передовые технологии в i-ACTIV AWD
i-ACTIV AWD использует систему обнаружения пробуксовки передних колес, которая позволяет контролировать тяговое усилие с высокой степенью точности.