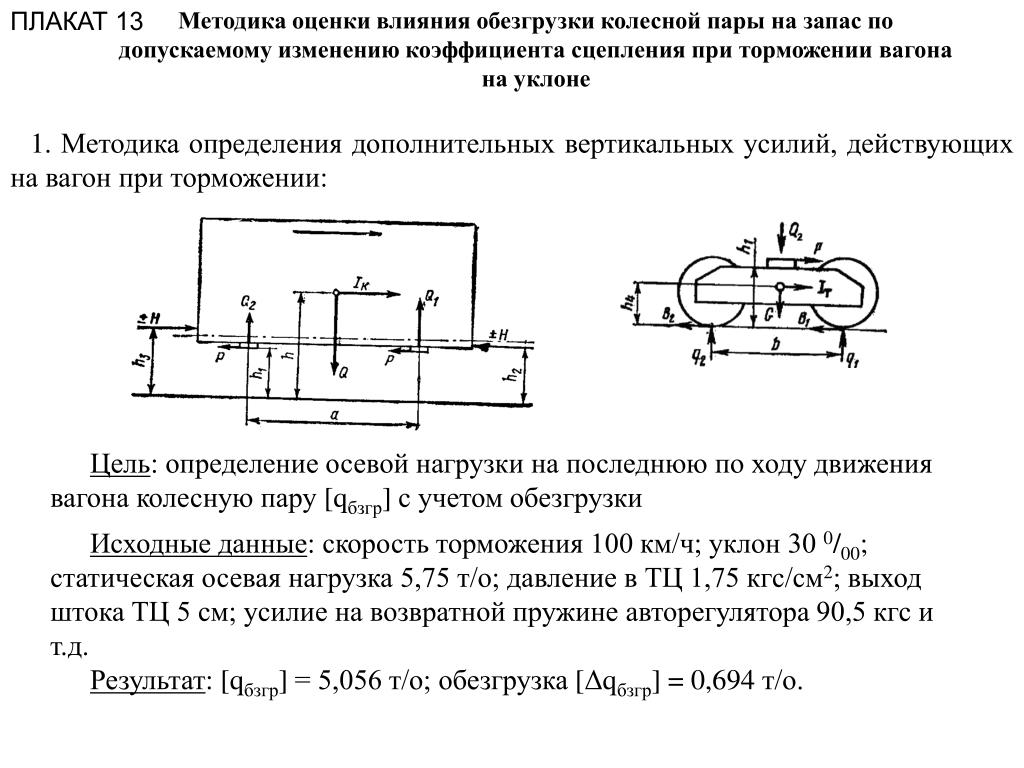
Коэффициент торможения — Энциклопедия по машиностроению XXL
Таким образом, коэффициент торможения падения частиц во встречном потоке зависит от числа тормозящих элементов п, отношения скорости витания и скорости падения в вакууме, коэффициента аэродинамического торможения К и ряда факторов, суммарно учитываемых эмпирическим коэффициентом с. Согласно (3-20) и (3-24) определим, что [c.92]Экспериментальное исследование зависимости коэффициента торможения Л1т=Тт/тг от режимных и геометрических факторов проведено в Л. 21, 332, 333]. Первое систематическое изучение этого вопроса с целью раскрытия обш,его критериального уравнения применительно к каскадно расположенным сетчатым тормозящим элементам выполнено в (Л. 332, 335]. Основные опыты проведены на полупромышленной установке, оборудованной отсечными шиберами с быстродействующим пневмоприводом на границах нижней камеры. Время, определенное для различного числа групп тормозящих элементов, было приведено при прочих равных условиях к одному постоянному числу групп /1 = 6 с ошибкой 3—7% по формуле
 92]
92]
С увеличением живого сечения тормозящих элементов /ж и расходной концентрации р, (при Re>3,6X X 10 ) коэффициент торможения Мт уменьшается. [c.93]
В том случае, если головная часть отличается от конической, расчет коэффициента торможения можно вести следующим образом. Вначале находится для заданной головной части по соответствующим аэродинамическим зависимостям коэффициент волнового сопротивления а затем, используя формулу [c.167]
Для летательного аппарата, выполненного по нормальной схеме, обычно отнощение 5оп/5кр 1. следовательно, можно принять к к. При переднем расположении оперения (схема утка ) величина 5оп/5кр 1, поэтому коэффициент торможения перед крылом, расположенным в хвосто- [c.202]
Действие ингибитора можно характеризовать коэффициентом торможения, показывающим во сколько раз уменьшается скорость коррозии в результате действия ингибитора
[c. 66]
66]
Эффективность действия ингибитора и коэффициент торможения определяют по формулам (3.24 и 3.25). [c.69]
Характерная особенность коррозионного поведения алюминиевого покрытия — это значительное понижение скорости коррозии при увеличении времени испытания и, следовательно, рост коэффициента торможения.. [c.59]
В районах Москвы и Батумской коррозионной станции, т.е. в атмосферах с наибольшим содержанием серосодержащих соединений, наблюдается особенно значительный рост коэффициента торможения, что может быть объяснено образованием защитных пленок в присутствии SO2 [c.59]
Количественная характеристика эффективности ингибитора [27] как средства, уменьшающего скорость коррозии, выражается либо коэффициентом торможения (ингибирования) [c.9]
Уравнение (43) можно представить в виде произведения четырех сомножителей — частных коэффициентов торможения
[c. 23]
23]
ФОРМУЛЫ ДЛЯ РАСЧЕТА КОЭФФИЦИЕНТОВ ТОРМОЖЕНИЯ [c.23]
Если учесть влияние тонкой структуры двойного слоя на кинетику и на поверхностную концентрацию ионов в электродной реакции и сочетать полученное уравнение с приведенным ранее кинетическим уравнением реакции катодного выделения водорода, то можно получить следующее выражение для коэффициента торможения [c.25]
РАСЧЕТ КОЭФФИЦИЕНТОВ ТОРМОЖЕНИЯ И СОПОСТАВЛЕНИЕ ИХ С РЕЗУЛЬТАТАМИ ЭКСПЕРИМЕНТОВ [c.31]
Расчеты по уравнению (59) не согласовываются с опытными данными при переходе от коррозии с водородной деполяризацией к коррозии со смешанной или с кислородной деполяризацией, так как уравнение (44), из которого получено уравнение (59), было введено в предположении, что единственным катодным процессом, ответственным за коррозию, является выделение водорода, следовательно, расчетная величина у должна совпадать с опытной лишь в случае чисто водородной деполяризации.
При наложении кислородной деполяризации коэффициент торможения отражает замедление ингибитором двух катодных реакций — выделения водорода и восстановления кислорода
Если основываться на уравнении (44) и вытекающем из него расчетном уравнении (59), то формально можно считать, что у4 в данном случае при отрицательных адсорбционных потенциалах будет меньше единицы и замедление коррозии будет связано с блокировочным коэффициентом уз, который в этом случае больше, чем результативный опытный коэффициент торможения. В этом случае растворение металла совершается на той доли поверхности (1 — 0), которая [c.39]
Обеспечение необходимой степени защиты металла от коррозии (2) или необходимого значения коэффициента торможения коррозии (у) при такой концентрации ингибитора, при которой его применение будет экономически оправданным и целесообразным. В зависимости от области применения и стоимости ингибитора оптимальные концентрации и защитные эффекты могут изменяться в широких пределах. Так, например, ингибитор с V = 2 (2 = 50%) по эффективности будет удовлетворительным применительно к системам водоснабжения и окажется неподходящим для кислотного травления (у > 8, 2 > 87%).
[c.56]
В зависимости от области применения и стоимости ингибитора оптимальные концентрации и защитные эффекты могут изменяться в широких пределах. Так, например, ингибитор с V = 2 (2 = 50%) по эффективности будет удовлетворительным применительно к системам водоснабжения и окажется неподходящим для кислотного травления (у > 8, 2 > 87%).
[c.56]
При наличии в соляной кислоте сероводорода эффективность мочевины падает особенно с увеличением температуры (рис., 15). Если при 20-50° и концентрации мочевины 1 г/л коэффициент торможения составляет 1,5-2, то при 90° он не превышает 1,1, т.е. практически при 90 она не тормозит сероводородную коррозию стали ОМ Можно предположить, что в присутствии сероводорода адсорбция мочевины на стали уменьшается по сравнению со средой, не содержащей сероводород. [c.83]
В присутствии сероводорода ДММ резко увеличивает свою ингибирующую эффективность (рис. 16). Как и для КПИ-2, при больших концентрациях ДММ (> 0,1 г/л) коэффициент торможения увеличивается в 50-100 раз.
Однако при концентрациях 0,01-0,05 г/л коэффициент торможения коррозии стали имеет почти такое же значение, как и в кислоте без сероводорода. При концентрации 0,5-1 г/л и температурах 50-90° эффективность ДММ выше, чем КПИ-2 ДММ защищает сталь на 99,8-99,95%. При всех исследованных температурах наблюдается линей- [c.83]
Защитное действие уротропина (коэффициент торможения у и степень защиты Z, %) при коррозии малоуглеродистой стали ОМ при 90° в 0,1 н. НС1 и в 0,1 н. H I, [c.88]
Наибольшее увеличение эффективности наблюдается при 20°. Если коэффициент торможения в отсутствие сероводорода не превышает 3,то в присутствии сероводорода [c.93]
Для увеличения времени пребывания падающих частиц прибегают к различным вставкам в канал Л. 169, 285, 222, 333], создающим дополнительное механическое торможение. Назовем подобные дисперсные системы торможенной противоточной газовзвесью Л.
Влияние геометрического симплекса сеток doldi немонотонно. Эта величина характеризует стесненность прохода частиц через отверстия сеток и загроможден-ность этих отверстий для прохода воздуха. Первый фактор увеличивает механическое торможение, второй создает условия для неравномерного распределения воздуха по сечению камеры, уменьшая Мт. Согласно [Л. 332] при 1,87[c.93]
Торможение потока перед крылом может оказать существенное влияние на интерференцию между крылом и корпусом при сверхзвуковых скоростях полета. В этом случае торможение потока вызывается головным скачком уплотнения. На примере формулы для коэффициента нормальной силы комбинации корпус — — крыло Сцт.кр = Сут + (Кт + Ккр)Сукт> 1, где fei — коэффициент торможения потока.
Примем коэффициент торможения ЦМ1 — число Маха для пото- [c.637]
Прини.мая коэффициенты торможения = fe =1, получаем с оп = 0,4954 [c.643]
Действительное обтекание характеризуется торможением потока перед оперением, которое необходимо учитывать при определении аэродинамических параметров. Степень такого торможения можно охарактеризовать средним коэффициентом торможения = qlq , где екорост-цой напор д — /грМ /2 находится по некоторой осредненной величине числа М1 возмущенного потока перед оперением. Полагая, что давления в возму- [c.166]
Экстраполяция тафелевских (линейных) участков поляризационных кривых до значений соответствующих стационарных потенциалов дает токи коррозии металла в среде без ингибитора (1кор) и с ингибитором (iKopi)- Полученные таким образом данные позволяют определить эффективность действия ингибитора ( 2, %) и коэффициент торможения (J) по формулам (3.
Выражение для коэффициента торможения = 1согИ соз можно получить, поделив почленно левые и правые части уравнений (38) и (42) [c.23]
Частные коэффициенты ух и у могут быть названы кинетическими коэффициентами торможения (ингибирования), уз — блокировочным или механическим коэффициентом торможения, а У4—двойнослойным или адсорбционным коэффициентом торможения. [c.23]
Таким образом, величина К в выражении для У4 (48) в зависимости от характера протекания анодной реакции растворения металла и значений кинетических параметров изменяется в пределах от 3,3 до 11,0, а показатели степени в уравнениях (45) и (46), определяющих 71 и 72,— от /4 до Уа и от до /4 соответственно. Поэтому очевидно, что кинетический эффект (частные коэффициенты торможения 71 и 7з) может играть заметную роль лишь при низких концентрациях добавок, т.
 25]
25]Из табл. 2 следует, что коэффициенты торможения кислотной коррозии цинка и железа одним и тем же ингибитором — хлоридом Л -децил 3-окси пиридиния (ДЗОП) примерно одинаковы. [c.32]
Опытные данные, представленные в табл. 2, 3, показывают, что ингибирующий эффект (экспериментальный коэффициент торможения Yon) весьма чувствителен даже к сравнительно небольшому изменению в строении молекул ингибитора. Переход от хлорида Л -децил 3-окси пиридиния (ДЗОП) к хлориду Л -децилпиридиния (ДП), отличающегося только тем, что в его молекуле вместо группы ОН в гетероцикле стоит водород, приводит к понижению защитного действия в 2—4 раза. В то же время, как уже отмечалось выше. [c.34]
Обычно в условиях коррозии выделение водорода лимитируется кинетическими ограничениями, а восстановление кислорода — диффузионными. Как уже отмечалось выше, в присутствии индивидуальных адсорбционных ингибиторов следует ожидать значительно более эффективного подавления процесса выделения водорода, т. е. уменьшения величины /н,- Поэтому большинство катионноактивных ингибиторов (пиридины, амины и др.) оказываются менее действенными в условиях смешанной или кислородной деполяризации, чем при коррозии с чистоводородной деполяризацией, а экспериментальные коэффициенты торможения соответственно ниже, чем рассчитанные по уравнению (59). Значения ур, совпадающие с
[c.35]
е. уменьшения величины /н,- Поэтому большинство катионноактивных ингибиторов (пиридины, амины и др.) оказываются менее действенными в условиях смешанной или кислородной деполяризации, чем при коррозии с чистоводородной деполяризацией, а экспериментальные коэффициенты торможения соответственно ниже, чем рассчитанные по уравнению (59). Значения ур, совпадающие с
[c.35]
Насыщение соляной кислоты сероводородом, сопровождается увеличением ингибирующего действия тиомочевины при температурах 20 и 50°. Наблюдается линейная зависимость между 1ду и дС, При 20 коэффициент торможения коррозии стали при концентрации тиомочевины [c.78]
5. Определение коэффициента торможения
Коэффициент
торможения потока определяется как
отношение скоростного напора возмущенного
потока в рассчитываемой области к
скоростному напору невозмущенного
потока
, где-
плотность и скорость возмущенного
потока,-
плотность и скорость невозмущенного
потока.
Коэффициент торможения в области первой несущей поверхности определяется по графикам. Торможение в этой области вызвано наличием носовой части фюзеляжа, поэтому. В первом приближении можно не учитывать форму носовой части. При дозвуковых числах Маха торможение определяется трением, при сверхзвуковых числах Маха определяющим является торможение потока за скачком уплотнения. Коэффициенты торможения потока в области второй несущей поверхности, где
определяется по графикам. , где- при сверхзвуковых скоростях часть площади НП II, на которую оказывает влияние впереди стоящая НП I . Для дозвуковых скоростей= 1.
Для нормальной аэродинамической компоновки .
Определение коэффициента торможения потока | ||||||
M | 0,6 | 0,7 | 0,968846 | 1,4 | 1,6 | 1. |
Ктнп1 | 0,99 | 0,99 | 0,99 | 0,99 | 0,99 | 0,99 |
x’ | 0,984022 | 0,984022 | 0,984022 | 0,984022 | 0,984022 | 0,984022 |
Кт2* | 0,987 | 0,98 | 0,978 | 0,975 | 0,94 | 0,925 |
Кт2 | 0,9935 | 0,99 | 0,989 | 0,9875 | 0,97 | 0,934331 |
Ктнп2 | 0,983565 | 0,9801 | 0,97911 | 0,977625 | 0,9603 | 0,924988 |
 8
86.
 Определение коэффициента подъемной силы самолета
Определение коэффициента подъемной силы самолетапроизводная коэффициента подъемной силы самолета определяется по соотношению:
(2.1)
Здесь производные коэффициентов подъемной силы по углу атаки, соответственно, изолированного фюзеляжа, изолированных консольных частей крыла, горизонтального оперения, изолированных мотогондол и других элементов конструкции самолета, при обтекании которых может возникать подъемная сила;
M | 0,6 | 0,7 | 0,968846 | 1,4 | 1,6 | 1.8 |
0,038216 | 0,042877 | 0,045487 | 0,043809 | 0,039708 | 0,033556 | |
0,038595 | 0,043279 | 0,045714 | 0,044215 | 0,040094 | 0,03185 | |
| 0,031488 | 0,032488 | 0,033488 | 0,035488 | 0,039488 | 0,044488 |
kαα кр | 1,523354774 | 1,522629928 | 1,522149257 | 1,5217832 | 1,5193291 | 1,515980893 |
kαα го | 2,107051561 | 2,103460394 | 2,101078962 | 2,0992654 | 2,0871067 | 2,070518498 |
η | 0,976628148 | 0,973790399 | 0,972203809 | 0,9732355 | 0,9757802 | 0,97994848 |
Ктнп1 | 0,99 | 0,99 | 0,99 | 0,99 | 0,99 | 0,99 |
Кт2 | 0,9935 | 0,99 | 0,989 | 0,9875 | 0,97 | 0,934331 |
Определение коэффициента подъемной силы самолета | ||||||
| 0,049865 | 0,055564 | 0,058721 | 0,056808 | 0,051726 | 0,043553 |
Sф’ | 76,27448 | |
Sкр’ | 0,177632 | |
Sго’ | 0,003605 | |
Sво’ | 0,1702 |
Корректировка на отличие размера площадей.
 Выпуск 2
Выпуск 2Перейти к списку корректировок
Экономический научный журнал «Оценка инвестиций»
Справочник типовых рыночных корректировок для рынка недвижимости г. Москвы и Московской области
Выпуск №2
Автор — Барамзин Н.К.
Под редакцией — к.э.н. Лекаркиной Н.К.
Дата выпуска — 2019 г.
Период применения корректировки — 2018 г, 2019 г.
Регион применения: г. Москва и Московская область
Область применения — для коммерческой недвижимости
Возможность модификации — допускается
Корректировка на отличие размера площадей (или корректировка на масштаб, или корректировка на площадь) – учитывает зависимость стоимости объекта оценки (помещения, здания) от общей площади объекта исследования. В общем случае удельная рыночная стоимость большего по площади объекта будет ниже, чем у аналогичного по другим параметрам объекта с меньшей площадью. Kn , где
Kn , где
Sоо – площадь объекта оценки;
Sоа – площадь объекта аналога;
Kn – коэффициент торможения в соответствии с типом объектом оценки
Средние значения коэффициента торможения для различных объектов недвижимости приведены в табл. 1.
Справочник обновился и переехал — ссылка для перехода ]]>https://www.cepes-invest.com/manual]]>
Или
1. Зайдите на сайт Онлайн-сервиса АФОС — ]]>cepes-invest.com]]>
2. Откройте дополнительное меню
3. Выберете пункт «Справочник»
Перейти к списку корректировок
Экономическое устаревание оборудования и методы его определения
Экономическое устаревание называют также внешним износом, т. к. оно зависит от причин внешних по отношению к самому объекту оценки.
к. оно зависит от причин внешних по отношению к самому объекту оценки.
Экономическое устаревание проявляется в потере стоимости, вызванной крупными отраслевыми, региональными, общенациональными или мировыми технологическими, социально-экономическими, экологическими и политическими изменениями, например, сокращением спроса и предложения на определенный вид продукции, ухудшением качества сырья, рабочей силы, вспомогательных систем, сооружений, коммуникаций, правовыми изменениями, относящимися к законодательству, муниципальным постановлениям и административным распоряжениям [52].
Экономическое устаревание часто зависит не только от причин, существующих на данном предприятии, но и в смежных отраслях, где используется аналогичное оборудование, а также при определении экономического устаревания необходимо учитывать региональные и местные особенности.
Экономическое устаревание (внешний износ) — это потеря стоимости, обусловленная внешними факторами, такими как: законодательные изменения, ограничивающие или ухудшающие права собственности, потеря рынка и т. д.
д.
Так как экономическое устаревание — результат внешнего влияния, которое воздействует на предприятие в целом, а не на каждый объект в отдельности или их группу, поэтому экономическое устаревание чаще оценивается с применением доходного подхода.
Среди причин экономического устаревания можно выделить следующие:
- сокращение спроса;
- возросшая конкуренция;
- изменения в структуре запасов сырья;
- рост расценок на сырье, рабочую силу или коммунальные услуги без соответствующего увеличения цены выпускаемой продукции;
- высокая инфляция;
- высокие процентные ставки по банковским кредитам;
- законодательные ограничения;
- изменения в структуре рынка товаров,
- факторы окружающей среды.
При расчете величины экономического устаревания используют принцип замещения, т.е. учитывают полезность объекта. В силу экономических причин часть оборудования (инвестиций, мощностей и т.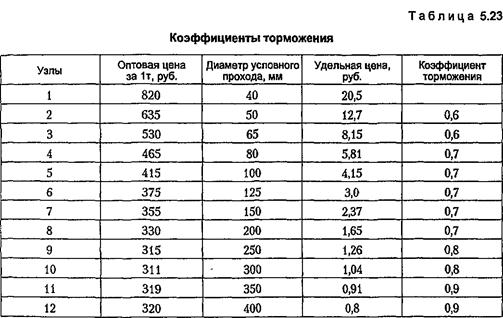 д.) оказывается не задействованной и неприносит никакой пользы. А поскольку полезность объекта в связи с недоиспользованием меньше, чем у объекта, работающего с полной производительностью, то и стоимость его уменьшается.
д.) оказывается не задействованной и неприносит никакой пользы. А поскольку полезность объекта в связи с недоиспользованием меньше, чем у объекта, работающего с полной производительностью, то и стоимость его уменьшается.
«Недоиспользование», а в результате потеря стоимости, выражается уравнением
Кэ = (1 — (Np/ Nн)n х 100%,
где:
Кэ — коэффициент экономического устаревания;
Nр — реальная мощность или реальная производительность объекта;
Nн — номинальная мощность или номинальная производительность объекта;
n — «коэффициент торможения» коэффициент Чилтона, отражающий влияние закона экономии на масштабе.
Иногда недоиспользование может быть причиной функционального устаревания, а иногда и физического износа оборудования.
Например, если предприятие работает не в полную мощность по экономическим причинам, то потери, обусловленные недоиспользованием, относятся к экономическому устареванию; если же нарушен производственный баланс (имеются узкие участки производства), то потери могут быть отнесены на функциональное устаревание. Недоиспользование может возникнуть и в силу физических причин, таких как плохое техническое обслуживание, отложенный ремонт, недостаток запчастей и пр. Во всех случаях оценщик должен выявить причины и сопутствующие обстоятельства, приведшие к недоиспользованию техники, чтобы четко разделить виды износа и устаревания и правильно их учесть [43].
Недоиспользование может возникнуть и в силу физических причин, таких как плохое техническое обслуживание, отложенный ремонт, недостаток запчастей и пр. Во всех случаях оценщик должен выявить причины и сопутствующие обстоятельства, приведшие к недоиспользованию техники, чтобы четко разделить виды износа и устаревания и правильно их учесть [43].
Пример 1.
Требуется оценить производственную линию, рассчитанную на выпуск 500 единиц продукции в день. В результате возросшей конкуренции линия используется с производительностью 380 единиц в день. Недоиспользование (потеря стоимости в результате экономического устаревания) определяется по формуле:
Кэ = (1 — (Np/ Nн)n х 100% = (1 — (380/ 500)0,7 х 100% = (1 — 0,760,7) х 100% = 17,5%
Москва, «Русская оценка», Редактор В.П. Антонов
Полезные ссылки по теме
Оценка оборудования. Цены на станки
Новости :: Какие тормозные колодки лучше: мягкие или жесткие? —
Давайте рассмотрим какие лучше тормозные колодки, мягкие или жесткие, с точки зрения состава фрикционных смесей, применяемых современными производителями. Состав таких фрикционных смесей может включат в себя до 20 различных элементов. Процентное соотношение и различные добавки этих веществ непосредственно влияют на тормозные качества готового фрикциона и, как следствие, на эффективность торможения автомобиля.
Состав таких фрикционных смесей может включат в себя до 20 различных элементов. Процентное соотношение и различные добавки этих веществ непосредственно влияют на тормозные качества готового фрикциона и, как следствие, на эффективность торможения автомобиля.
Все химические и механические вещества, входящие в состав фрикционных смесей, можно условно разделить на абразивы, модификаторы трения, усилители трения, связующий состав и наполнитель. Абразив в составе фрикционной смеси отвечает за коэффициент торможения в начале тормозного усилия и изготовители колодок вынуждены искать сбалансированный компромисс в количественном составе абразива. Если его будет много, то колодка будет жесткой и начнется интенсивная выработка тормозного диска, если абразив будет недостаточным, то диск начнет полироваться. А на отполированном диске коэффициент трения падает, и торможение становится неэффективным.
Модификатором трения часто выступает обычный графит, имеющий хороший коэффициент трения, но не работает при температуре свыше 600°С. Связующим составом применяется фенолоальдегидный органический полимер, пришедший на смену асбесту, запрещенному в большинстве стран мира, но об этом мы уже говорили в предыдущей статье. В качестве усилителя трения используют различные кевларовые синтетические составы, сульфиды металлов и нефтяной кокс. Однако Вы нигде не узнаете точный список элементов, входящих в состав фрикционной смеси конкретного производителя, потому что это коммерческая тайна и исследовательские центры постоянно работают над совершенствованием состава фрикционных смесей, чтобы удовлетворить растущие запросы автомобильной индустрии, которая предъявляет к системам торможения все более высокие требования.
Связующим составом применяется фенолоальдегидный органический полимер, пришедший на смену асбесту, запрещенному в большинстве стран мира, но об этом мы уже говорили в предыдущей статье. В качестве усилителя трения используют различные кевларовые синтетические составы, сульфиды металлов и нефтяной кокс. Однако Вы нигде не узнаете точный список элементов, входящих в состав фрикционной смеси конкретного производителя, потому что это коммерческая тайна и исследовательские центры постоянно работают над совершенствованием состава фрикционных смесей, чтобы удовлетворить растущие запросы автомобильной индустрии, которая предъявляет к системам торможения все более высокие требования.
Кодировка колодок по коэффициенту трения
Мы уже выяснили что наличие абразива в составе влияет на «жесткость» тормозной колодки. Чем больше абразива — тем жестче воздействие на тормозной диск (выработка), ну и наоборот: меньше абразива — мягче колодка и больше пробег диска.
SAE (Society of Automotive Engineers — американская ассоциация автомобильных инженеров) разработала и систематизировала алгоритм идентификации коэффициента трения тормозной колодки.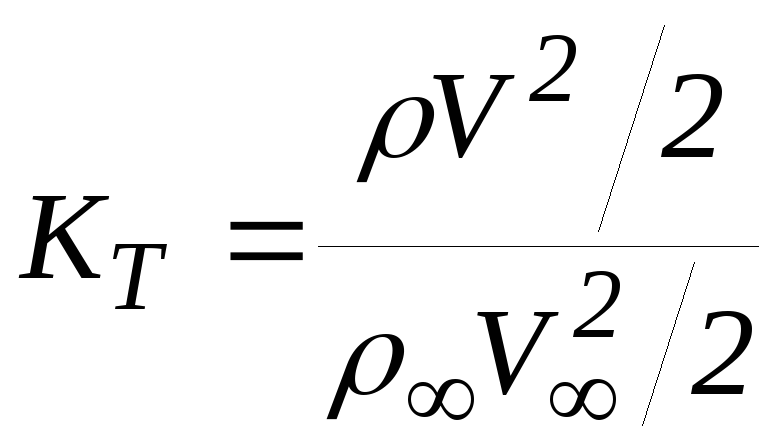 В основе этой квалификации лежит буквенное обозначение двух коэффициентов трения, рассчитанных опытным путем. Первая латинская литера это показатель средневзвешенного обычного коэффициента трения, измеренного в 4-х температурных диапазонах — 90°С, 122°С, 149°С, 205°С. Вторая литера — это так называемый горячий средневзвешенный коэффициент трения, полученный уже в десяти температурных точках на перегретой колодке. Этот метод называется J661.
В основе этой квалификации лежит буквенное обозначение двух коэффициентов трения, рассчитанных опытным путем. Первая латинская литера это показатель средневзвешенного обычного коэффициента трения, измеренного в 4-х температурных диапазонах — 90°С, 122°С, 149°С, 205°С. Вторая литера — это так называемый горячий средневзвешенный коэффициент трения, полученный уже в десяти температурных точках на перегретой колодке. Этот метод называется J661.
Посмотрите на таблицу соответствия:
| КОД | Коэффициент трения | |
| C | до 0.15 | |
| D | с 0.15 до 0.25 | |
| E | с 0.25 до 0.35 | |
| F | с 0.35 до 0.45 | |
| G | с 0.45 до 0.55 | |
| H | с 0.55 до 0. 8 8 | |
| Z | не определен |
Стандартные тормозные колодки для города имеют коэффициент «Е» т.е. 0,25 — 0,35. Соответственно в обозначениях таких колодок может быть указан индекс «ЕЕ», например. И этот индекс означает, что такая тормозная колодка, а точнее фрикционная смесь, «мягкая». Чем выше значение индекса и старше литеры, тем жестче смесь. Чаще встречаются обозначения с одинаковыми литерами индекса: «HH» или «FF». Но если вторая литера старше первой, например «FG», то такие колодки нуждаются в прогревочном периоде и холодными не эффективны. И наоборот. Если первая буква индекса старше второй — «FЕ» — то перед нами низкотемпературная колодка с органической фрикционной смесью.
Таким образом существуют три типа тормозных колодок:
ОРГАНИЧЕСКИЕ — самые распространенные, содержат органику и графит, смесь черного цвета, мягкие и не скрипят, но работоспособны
ПОЛУМЕТАЛЛИЧЕСКИЕ — смесь более светлая, жесткие, высокий коэффициент трения при высоких температурах, но требуют разогрева для выхода на рабочий режим, для автоспорта.
МЕТАЛЛОКЕРАМИЧЕСКИЕ — это компромиссное решение между устойчивым трением и широким диапазоном рабочих температур.
Подводя итог, можем сделать следующий вывод. Чтобы купить тормозные колодки с наилучшими характеристиками, нужно найти компромисс между эффективным торможением и риском «потерять» тормозной диск на дистанции в одну замену колодок. Не следует заблуждаться в том, что спортивные колодки лучший выбор для любого автомобиля. Коэффициент торможения спортивных колодок подхватывает скачкообразно и прогрессирует от 180°С, а значит такие тормозные колодки нужно постоянно разогревать, а это невозможно в городском потоке и вы останетесь без эффективных тормозов вовсе.
Определите манеру своего вождения: спокойная — органика, агрессивная — полуметалл. Но еще следует принять во внимание такой немаловажный факт, как вес вашего автомобиля. Если легкий седан или универсал, то с его весом великолепно справятся и органические колодки. А вот для кроссоверов или тяжелых внедорожников SUV уже потребуется более мощное усилие для торможения и тогда выбирайте полуметаллические тормозные колодки или металлокерамику.
Удачи на дорогах!
Вернуться к новостям
Расчет уставок ДЗТ на терминале Сириус-Т3
Содержание
В данной статье будет рассматриваться расчет продольной дифференциальной защиты трансформатора выполненный на терминале «Сириус-Т3» (АО «РАДИУС Автоматика»). Расчет выполнен в соответствии с «Рекомендациями по выбору уставок устройств защиты трансформаторов Сириус-Т и Сириус-Т3» АО «РАДИУС Автоматика».
Таблица 1 – Данные трансформатора
| Данные об объекте | Наименование |
|---|---|
| Тип трансформатора | ТДТН–25000/110 |
| Группа соединения обмоток трансформатора | Y/Y/∆ |
| Наличие реакторов в зоне дифзащиты (на какой стороне) | Нет |
| Коэффициенты трансформации ТТ: | |
| на стороне ВН (Iперв. ТТ / Iвтор. ТТ) | 200/5 |
| на стороне НН | 3000/5 |
| Сторона, на которой установлен РПН | ВН |
| Размах регулирования РПН в процентах | ±16 % |
Результаты расчетов токов короткого замыкания на подстанции «Меловая» в максимальном и в минимальном режимах работы приведены в таблице 2.
Таблица 2 – Результаты расчетов токов короткого замыкания
| Место КЗ | Максимальный ток трёхфазного КЗ I(3)к.max, кА, приведённый к уровню напряжения | Минимальный ток двухфазного КЗ I(2)к.min, кА, приведённый к уровню напряжения | ||
|---|---|---|---|---|
| 110 кВ | 6 кВ | 110 кВ | 6 кВ | |
| Шины 110 кВ | 25 | — | 2,48 | — |
| Шины 6 кВ | 0,6327 | 11,6 | 0,4593 | 8,42 |
Определяем первичные токи на сторонах защищаемого трансформатора, соответствующие его номинальной мощности:
на стороне ВН:
на стороне НН:
Коэффициенты трансформации трансформаторов тока Kтт:
- на стороне ВН – 200/5;
- на стороне НН – 3000/5.

Определяем вторичные токи в плечах защиты, соответствующие номинальным токам защищаемого трансформатора: на стороне ВН:
на стороне НН:
Принимаем уставки: Iном.ВН – 3,14 А; Iном.НН – 3,64 А.
2.1.1 Определяем отношение тока внешнего расчётного КЗ к номинальному току трансформатора Iкз.внеш.max* при КЗ на стороне НН:
2.1.2 Определяем уставку дифференциальной отсечки при КЗ на стороне НН по условию:
где:
- Kотс – коэффициент отстройки, принимается равным 1,2;
- Kнб(1) – отношение амплитуды первой гармоники тока небаланса к приведённой амплитуде периодической составляющей тока внешнего КЗ (поскольку на всех сторонах трансформатора вторичный номинальный ток ТТ 5 А, принимается Kнб(1) = 0,7).
Принимаем уставку Iдиф./Iном=4,2.
2.2.1 Определяем базовую уставку Iд1/Iном, согласно рекомендации производителя, выбирается в диапазоне 0,3 — 0,5. Принимаем Iд1/Iном. =0,4.
=0,4.
2.2.2 Определяем дифференциальный ток, вызванный протеканием по защищаемому трансформатору сквозного тока:
где:
- Kотс – коэффициент отстройки, принимается равным 1,3;
- Iнб.расч – расчётный ток небаланса, порождаемый сквозным током:
- Kпер – коэффициент, учитывающий переходный режим, принимается Kпер = 2,0;
- Kодн – коэффициент однотипности трансформаторов тока, принимается Kодн = 1,0;
- ε — относительное значение полной погрешности трансформаторов тока в установившемся режиме, ε = 0,1;
- ∆UРПН – размах РПН;
- ∆fдобав – слагаемое, обусловленное неточностью задания номинальных токов сторон ВН и НН – округлением при установке, а также метрологическими погрешностями, вносимыми элементами устройства, согласно данным изготовителя, ∆fдобав = 0,04.
2.2.3 Определяем тормозной ток:
2.2.4 Определяем расчётный коэффициент торможения:
Принимаем уставку Kторм = 68 %.
2. 2.5 Определяем значение первой точки излома:
2.5 Определяем значение первой точки излома:
2.2.6 Уставка второй точки излома Iд2/Iном, согласно рекомендации производителя, выбирается в диапазоне 1,5 — 2. Принимаем уставку — 1,7.
2.2.7 Уставка блокировки от второй гармоники Iд.г2/Iд.г1 рекомендуется на уровне 12 — 15 %.
Принимаем Iд.г2/Iд.г1=0,13.
Строим тормозную характеристику ступени ДЗТ-2, см. рис.1. Выбору подлежат:
- Iд1/Iном. = 0,4 — базовая уставка ступени;
- Kторм. = 68% – коэффициент торможения, наклон тормозной характеристики на втором ее участке;
- Iт1/Iном. = 0,6 – первая точка излома тормозной характеристики;
- Iд2/Iном. = 1,7 – вторая точка излома тормозной характеристики;
- Iд.г2/Iд.г1 = 0,13 – уставка блокировка от второй гармоники;
Рис. 1 — Тормозная характеристика ступени ДЗТ-2
2.2.8 Определяем первичный ток срабатывания защиты при отсутствии торможения:
2.2.9 Определяем коэффициент чувствительности при КЗ на стороне НН:
где: I(2)к. min – 459,3 А минимальный ток двухфазного КЗ приведённый к уровню напряжения НН.
min – 459,3 А минимальный ток двухфазного КЗ приведённый к уровню напряжения НН.
Чувствительность защиты соответствует требованиям ПУЭ.
2.2.10 Выбираем уставку сигнализации небаланса в плечах дифференциальной защиты, согласно рекомендации производителя. Принимаем уставку Iдиф./Iном=0,1, Tс.з = 0,1.
Всего наилучшего! До новых встреч на сайте Raschet.info.
Поделиться в социальных сетях
как выбрать тормозные колодки для субару
Органические колодки – изготовлены из органических волокон, из-за чего их стоимость довольно велика. Для города, данный вид колодок является довольно хорошим выбором, они долго служат и щадят тормозной диск от быстрого износа. Но для данного типа колодок есть и характерные минусы, ухудшения качества торможения при попадании на них воды, это касается дождливой погоды или посещения мойки, а также им противопоказаны высокие рабочие температуры. Также органические колодки плохо справляются с тяжеловесными автомобилями и режимами длительного торможения.
Полуметаллические колодки – содержат в составе металл в процентном соотношении от 30% до 65% и дополнительные фрикционные материалы. Данный тип колодок чаще всего ставят на автомобилях с завода. Их неоспоримым плюсом является цена, по сравнению с керамикой, и высокий температурный диапазон, но данный тип колодок очень агрессивен к тормозным дискам. В заводском техническом регламенте обслуживания автомобиля срок периодичности замены колодок относиться именно к этим типам колодок.
Керамические колодки – их характеристики сравнимы с органическими колодками, но для данного вида плюсом является то, что они никак не реагируют на влагу и перегрев и работают в любых диапазонах до 600 градусов. Но нужно учитывать следующий фактор, что если вы будете ставить более производительные спортивные керамические колодки, то их использование в городских условиях будет очень не комфортным. Связано это с тем, что спортивные керамические колодки для того, чтобы они начали хорошо тормозить, необходимо прогреть. Стоит заметить, что небольшой прогрев понадобится и для гражданской керамики. В плюсы «городских» керамических колодок можно записать более бережное отношение к тормозным дискам, по сравнению с железосодержащими колодками. К минусам, безусловно, относится их цена.
Стоит заметить, что небольшой прогрев понадобится и для гражданской керамики. В плюсы «городских» керамических колодок можно записать более бережное отношение к тормозным дискам, по сравнению с железосодержащими колодками. К минусам, безусловно, относится их цена.
Металлокерамические колодки – тип колодок, которые в своем составе содержат как металл, так и керамику. Данный вид колодок наиболее оптимальный вариант для активной езды. Их рабочий диапазон весьма широк и данный тип колодок не требует прогрева.
Трение на ВПП
Отчетность
Вода
[ИКАО Doc 9137, часть 2, 3.3] Существует требование сообщать о наличии воды в пределах центральной половины ширины взлетно-посадочной полосы и делать оценку глубины воды, где это возможно. Чтобы иметь возможность сообщить с некоторой точностью о состоянии взлетно-посадочной полосы, следует использовать следующие термины и соответствующие описания:
- Влажная — поверхность меняет цвет из-за влаги.
- Мокрая — поверхность пропитана, но стоячей воды нет.
- Водные пятна — видны значительные участки стоячей воды.
- Затоплено — видна обширная стоячая вода
Дополнительно условие может называться в терминах третей ВПП: конец захода на посадку, середина и конец вылета. В Фарнборо часто можно услышать «мокрый, мокрый, мокрый».
Снег или лед
[ICAO Doc 9137, Part 2, ¶4.5]
- Слякоть.Водонасыщенный снег, который при ударе пятками о землю смещается с разбрызгиванием; удельный вес: от 0,5 до 0,8.
- Снег (на земле)
Примечание. При сочетании льда, снега и / или стоячей воды, особенно во время дождя, дождя и снега или падающего снега, могут образовываться вещества с удельным весом более 0,8. Эти вещества из-за высокого содержания воды / льда будут иметь скорее прозрачный, чем мутный вид, и при более высоком удельном весе их можно будет легко отличить от слякоти.
- Сухой снег.
 Снег, который может разлететься ветром или, если его утрамбовать вручную, снова развалится на части; удельный вес: до 0,35, но не включая 0,35.
Снег, который может разлететься ветром или, если его утрамбовать вручную, снова развалится на части; удельный вес: до 0,35, но не включая 0,35. - Мокрый снег. Снег, который, если его утрамбовать вручную, слипается и образует снежный ком; удельный вес: от 0,35 до 0,5, но не включая 0,5.
- Утрамбованный снег. Снег, спрессованный в твердую массу, которая сопротивляется дальнейшему сжатию и будет удерживаться вместе или распадаться на комки при поднятии; удельный вес: 0.5 лет и старше.
му
Таблица: Коэффициент трения для взлетно-посадочных полос, покрытых утрамбованным снегом и / или льдом, из документа ИКАО 9137, часть 2, таблица 4-1.
[ICAO Doc 9137, Part 2, ¶4.5]
- Существует также требование о регистрации характеристик сцепления на уплотненной взлетно-посадочной полосе, покрытой снегом и / или льдом. Условия сцепления на взлетно-посадочной полосе должны быть выражены как «информация о тормозном действии» с точки зрения измеренного / рассчитанного коэффициента трения μ или расчетного тормозного действия.

- Конкретные числовые значения μ обязательно связаны с конструкцией и конструкцией устройства измерения трения, а также с состоянием измеряемой поверхности и, в меньшей степени, с используемой скоростью измерения.
- Таблица 4-1 с соответствующими описательными терминами была разработана на основе данных о трении, собранных только в уплотненном снегу и льду, и поэтому ее не следует рассматривать как абсолютные значения μ, применимые для всех условий загрязнения. Если поверхность покрыта снегом и / или льдом и действие торможения оценивается как «хорошее», пилоты должны ожидать, что условия будут не такими хорошими, как для сухой, чистой поверхности покрытия ВПП (где доступное трение может быть больше чем то, что нужно в любом случае).Значение «хорошо» является сравнительным и подразумевает, что у самолетов не должно возникать проблем с управлением по курсу или торможением при посадке.
Гидропланирование
[Руководство по аэронавигационной информации Министерства транспорта Канады, 1. 6.5
6.5
- Гидропланирование зависит от глубины воды, давления в шинах и скорости. Более того, минимальная скорость, с которой невращающаяся шина начнет гидропланирование, ниже, чем скорость, с которой вращающаяся шина начнет гидропланирование, потому что скопление воды под невращающейся шиной увеличивает эффект аквапланирования.Поэтому пилоты должны знать об этом, поскольку это приведет к существенной разнице между характеристиками самолета при взлете и разбеге при одинаковых условиях взлетно-посадочной полосы. Минимальную скорость в узлах, при которой начнется аквапланирование, можно рассчитать, умножив квадратный корень из давления в шинах (PSI) на 7,7 для невращающейся шины или на 9 для вращающейся шины.
- Это уравнение дает приблизительное значение минимальной скорости, необходимой для гидроплана на гладкой влажной поверхности с лысыми шинами или без протектора.Например, минимальная скорость аквапланирования для самолета с шинами, накачанными до 49 фунтов на квадратный дюйм, рассчитывается как:
- Когда происходит аквапланирование, шины самолета полностью отделяются от реальной поверхности взлетно-посадочной полосы тонкой водяной пленкой, и они будут продолжать гидроплан до тех пор, пока снижение скорости не позволит шинам восстановить контакт с взлетно-посадочной полосой.
 Эта скорость будет значительно ниже скорости, с которой начинается аквапланирование.В этих условиях сцепление шины падает до незначительных значений, а в некоторых случаях колесо полностью перестает вращаться. Шины не будут обеспечивать торможение и не будут влиять на управляемость самолета. Результирующее увеличение тормозного пути невозможно точно предсказать, но, по оценкам, он увеличится на целых 700 процентов. Кроме того, известно, что при боковом ветре 10 узлов самолет снесет за борт взлетно-посадочной полосы шириной 200 футов примерно за 7 секунд в условиях аквапланирования.
Эта скорость будет значительно ниже скорости, с которой начинается аквапланирование.В этих условиях сцепление шины падает до незначительных значений, а в некоторых случаях колесо полностью перестает вращаться. Шины не будут обеспечивать торможение и не будут влиять на управляемость самолета. Результирующее увеличение тормозного пути невозможно точно предсказать, но, по оценкам, он увеличится на целых 700 процентов. Кроме того, известно, что при боковом ветре 10 узлов самолет снесет за борт взлетно-посадочной полосы шириной 200 футов примерно за 7 секунд в условиях аквапланирования.
Невращающаяся шина: 7,7 X √49 = 54 узлы; или Вращающаяся шина: 9 X √49 = 63 узла
Типичное давление в шинах главной передачи Gulfstream будет около 190 фунтов на квадратный дюйм. Это означает, что вы можете рассчитывать начать аквапланирование со скоростью около 125 узлов и не восстановите трение до 106 узлов. Носовое шасси обычно составляет около 135 фунтов на квадратный дюйм, что означает, что управление по курсу через носовое колесо можно заподозрить на скорости около 105 узлов.
Индекс сцепления на ВПП Канады (CRFI)
[Транспортное руководство Канады по аэронавигационной информации, 1.1.4] Многие аэропорты по всей Канаде оснащены механическими и электронными децелерометрами, которые используются для получения среднего значения измерения сцепления на взлетно-посадочной полосе.Среднее значение децелерометра для каждой взлетно-посадочной полосы указывается в канадском индексе сцепления на взлетно-посадочной полосе (CRFI). Опыт показал, что результаты, полученные с помощью различных типов децелерометров для воды и слякоти, неточны, и CRFI не будет доступен при наличии этих условий.
Канада — одна из немногих стран, которая сделала шаг вперед и попыталась количественно оценить значения сцепления на ВПП и их влияние на характеристики ВПП. Это важно для водителей Gulfstream, так как у нас не так много проблем с загрязнением взлетно-посадочной полосы, а производитель предоставляет данные CRFI вместо данных испытаний.
См . : G450 Performance (Landing).
: G450 Performance (Landing).
[Руководство по аэронавигационной информации Министерства транспорта Канады, 1.6.6.]
- Информация, содержащаяся в таблицах 1 и 2, была скомпилирована и считается наилучшими данными, доступными в настоящее время, поскольку она основана на данных обширных полевых испытаний торможения самолетов на загрязненных зимой поверхностях. Эта информация должна служить полезным руководством для пилотов при оценке летно-технических характеристик воздушного судна в неблагоприятных условиях взлетно-посадочной полосы.Бремя подготовки информации, инструкций или рекомендаций по эксплуатации воздушного судна на мокрой и / или загрязненной взлетно-посадочной полосе лежит на производителе воздушного судна. Информация, опубликованная в TC AIM, не изменяет, не создает каких-либо дополнительных, разрешает изменения и не допускает отклонений от нормативных требований. Эти таблицы предназначены для использования по усмотрению пилота.
- Из-за множества переменных, связанных с вычислением расстояний до остановки и сбалансированной длины поля, было невозможно уменьшить доступные данные до точки, где могут быть предоставлены поправки CRFI, которые были бы применимы ко всем типам операций.
 Следовательно, до дальнейшего изучения проблемы взлета включены только поправки на посадочную дистанцию и боковой ветер.
Следовательно, до дальнейшего изучения проблемы взлета включены только поправки на посадочную дистанцию и боковой ветер. - Следует отметить, что во всех случаях таблицы основаны на поправках к данным сухой взлетно-посадочной полосы, указанным в руководстве по летной эксплуатации воздушного судна (AFM), и что критерии сертификации не позволяют учитывать дополнительные замедляющие силы, создаваемые реверсивной тягой или реверсированием воздушного винта. На сухих ВПП реверсоры тяги обеспечивают лишь небольшую часть общих тормозных сил по сравнению с торможением колес.Однако по мере того, как торможение колес становится менее эффективным, часть тормозного пути, связанная с реверсированием тяги, становится больше. По этой причине, если реверсирование используется, когда сообщается о низком CRFI, сравнение фактического тормозного пути с показанным в таблице 1 сделает оценки слишком консервативными. Тем не менее, существуют обстоятельства, такие как боковой ветер, неработающий двигатель или неисправность реверсора, которые могут помешать их использованию.

- Посадочные расстояния, рекомендованные в Таблице 1, предназначены для самолетов без возможности дисковой тяги и / или реверсивной тяги и основаны на статистических вариациях, измеренных во время реальных летных испытаний.
- Несмотря на приведенные выше комментарии по использованию дисковой и / или обратной тяги, Таблица 2 может использоваться для самолетов с дисковой и / или обратной тягой и основана на посадочных расстояниях, рекомендованных в Таблице 1, с дополнительными расчетами, которые учитывают отклонение. и / или обратная тяга. При расчете расстояний в таблице 2 воздушное расстояние от экрана высотой 50 футов до точки приземления и расстояние задержки от точки приземления до применения полного торможения остаются неизменными по сравнению с таблицей 1.Эффекты дискового движения и / или реверсивной тяги использовались только для уменьшения тормозного пути от применения полного торможения до полной остановки.
- Рекомендованные посадочные дистанции, указанные в таблице 2, учитывают уменьшение посадочных дистанций, полученное с использованием дисковой и / или обратной тяги для самолета с турбовинтовым двигателем и с использованием обратной тяги для самолета с турбореактивным двигателем.
 Предполагались типичные низкие значения дискового эффекта и / или реверсивной тяги, и, следовательно, данные могут быть консервативными для правильно выполненных посадок некоторых самолетов с высокоэффективными дисковыми системами и / или системами реверсирования тяги.
Предполагались типичные низкие значения дискового эффекта и / или реверсивной тяги, и, следовательно, данные могут быть консервативными для правильно выполненных посадок некоторых самолетов с высокоэффективными дисковыми системами и / или системами реверсирования тяги. - Пределы бокового ветра для CRFI, показанные в таблице 3, содержат несколько иной диапазон отображения значений индекса сцепления на ВПП, чем те, которые перечислены в таблицах 1 и 2. Однако значения CRFI, используемые в таблице 3, точно такие же, как и в таблицах 1 и 2 и подходят для приращений значений индекса, указанных для указанных приращений значений индекса.
Рекомендуемые посадочные расстояния CRFI (без дискового / обратного тяги)
[Транспортное руководство Канады по аэронавигационной информации, 1.6.6.]
- Рекомендуемые посадочные дистанции в таблице 1 основаны на 95-процентном уровне уверенности. Уровень уверенности 95% означает, что в более чем 19 посадках из 20 указанное в таблице 1 расстояние будет консервативным для правильно выполненных посадок со всеми системами, обслуживаемыми на поверхности взлетно-посадочной полосы с сообщенным CRFI.

- Таблица 1 также будет консервативной для самолетов с турбореактивными и турбовинтовыми двигателями с реверсивной тягой, и, кроме того, в случае самолетов с турбовинтовыми двигателями, с эффектом, полученным от дискового двигателя.
- Рекомендуемые посадочные дистанции в таблице 1 CRFI основаны на стандартных методах пилотирования для приземлений на минимальном расстоянии от 50 футов, включая стабилизированный заход на посадку в VRef с использованием глиссады от 3 ° до 50 футов или ниже, твердое приземление, минимальную задержку до опускание носа, минимальное время задержки срабатывания опрокидывающихся устройств подъема грунта и применения тормозов, а также устойчивое максимальное противоскользящее торможение до остановки.
- Длина посадочной площадки — это посадочная дистанция, деленная на 0.6 (турбореактивные) или 0,7 (турбовинтовые). Если в руководстве по летной эксплуатации воздушного судна (AFM) посадочные характеристики выражены в терминах посадочной дистанции, введите таблицу в левом столбце.
 Однако, если AFM выражает характеристики посадки в терминах длины посадочной площадки, войдите в таблицу из одного из правых столбцов, предварительно проверив, какой коэффициент использовался в AFM.
Однако, если AFM выражает характеристики посадки в терминах длины посадочной площадки, войдите в таблицу из одного из правых столбцов, предварительно проверив, какой коэффициент использовался в AFM.
Рекомендуемые посадочные расстояния CRFI (подъем / обратная тяга)
[Транспортное руководство Канады по аэронавигационной информации, 1.6.6.]
- Рекомендованные 3. посадочные дистанции в таблице 2 основаны на 95-процентном уровне уверенности. Уровень уверенности 95 процентов означает, что более чем в 19 посадках из 20 указанное в таблице 2 расстояние будет консервативным для правильно выполненных посадок со всеми системами, обслуживаемыми на поверхности взлетно-посадочной полосы с сообщенным CRFI.
- Рекомендованные посадочные дистанции в таблице 2 учитывают уменьшение посадочных дистанций, полученное за счет использования дисковой и / или обратной тяги для самолета с турбовинтовым двигателем и с использованием обратной тяги для самолета с турбореактивным двигателем.
 Таблица 2 основана на посадочных дистанциях, рекомендованных в таблице 1, с дополнительными расчетами, которые учитывают дисковую тягу и / или обратную тягу. Предполагались типичные низкие значения дискового эффекта и / или реверсивной тяги, поэтому данные будут консервативными для правильно выполненных посадок некоторых самолетов с высокоэффективными дисковыми системами и / или системами реверсирования тяги.
Таблица 2 основана на посадочных дистанциях, рекомендованных в таблице 1, с дополнительными расчетами, которые учитывают дисковую тягу и / или обратную тягу. Предполагались типичные низкие значения дискового эффекта и / или реверсивной тяги, поэтому данные будут консервативными для правильно выполненных посадок некоторых самолетов с высокоэффективными дисковыми системами и / или системами реверсирования тяги. - Рекомендуемые посадочные расстояния в таблице 2 CRFI основаны на стандартных методах пилотирования для приземления на минимальное расстояние с 50 футов, включая стабилизированный заход на посадку в VRef с использованием глиссады от 3 ° до 50 футов или ниже, твердое приземление, минимальную задержку до опускание носа, минимальное время задержки срабатывания опрокидывающихся устройств и применения тормозов, дисковых тормозов и / или реверсивной тяги, а также устойчивое максимальное противоскользящее торможение до остановки.В Таблице 2 воздушное расстояние от экрана высотой 50 футов до точки приземления и расстояние задержки от точки приземления до применения полного торможения остаются неизменными по сравнению с Таблицей 1.
 Эффекты дискового движения / реверсивной тяги использовались только для уменьшения тормозного пути от применение полного торможения до полной остановки.
Эффекты дискового движения / реверсивной тяги использовались только для уменьшения тормозного пути от применение полного торможения до полной остановки. - Длина посадочной площадки — это посадочная дистанция, деленная на 0,6 (турбореактивные) или 0,7 (турбовинтовые). Если AFM выражает характеристики посадки в терминах посадочной дистанции, введите таблицу в левом столбце.Однако, если AFM выражает характеристики посадки в терминах длины посадочной площадки, войдите в таблицу из одного из правых столбцов, предварительно проверив, какой коэффициент использовался в AFM.
CRFI Пределы бокового ветра
[Руководство по аэронавигационной информации Министерства транспорта Канады, ¶1.6.6.] В этой таблице представлена информация для расчета составляющих встречного и бокового ветра. Вертикальные линии указывают рекомендованную максимальную составляющую бокового ветра для указанного CRFI.
Ожидаемый диапазон CRFI
[Руководство по аэронавигационной информации Министерства транспорта Канады, 1. 6.6.]
6.6.]
- CRFI зависит от типа поверхности, как показано в Таблице 4a. Следует отметить, что:
- Значения CRFI, приведенные в таблице 4a, применимы для всех температур. Обширные измерения показали, что нет корреляции между CRFI и температурой поверхности. Случай, когда температура поверхности как раз равна температуре плавления (т.е.е. около 0 ° C) может быть исключением, так как водная пленка может образоваться в результате плавления поверхности, что может вызвать скользкие условия с CRFI меньше, чем указано в таблице 4a.
- CRFI может охватывать диапазон значений по разным причинам, например, различия в текстуре поверхностей в пределах данного класса поверхности. Ожидаемые максимальные и минимальные CRFI для различных поверхностей перечислены в таблице 4b. Обратите внимание, что эти значения основаны на сочетании анализа обширных измерений и обоснованной инженерной оценки.
- Наибольший диапазон CRFI следует ожидать для тонкого слоя (3 мм или меньше) сухого снега на тротуаре (Таблица 4a).
 Это изменение может произойти из-за:
Это изменение может произойти из-за: - неравномерный снежный покров; и / или
- шины пробивают тонкий слой.
В любом случае поверхность, представленная самолету, может варьироваться от снега до тротуара.
Скорость торможения — обзор
Измерение эффективности ABS
Тормозные характеристики дорожного транспортного средства обычно определяются в терминах минимального тормозного пути и / или минимального среднего значения полного замедления (MFDD), но ни один из этих критериев не подходит для определения эффективности торможения дорожного транспортного средства при включенной АБС.Это связано с тем, что и тормозной путь, и MFDD предполагают, что сцепление шины с дорогой достаточно для создания требуемой скорости торможения, и, таким образом, эффективность торможения транспортного средства зависит от конструкции и технических характеристик тормозной системы транспортного средства. Но когда работает АБС, предел сцепления по определению превышен, и поэтому эффективность торможения зависит от сцепления шины с дорогой. Два параметра, которые могут повлиять на работу АБС во время испытания тормозных характеристик, — это непостоянный коэффициент сцепления шины с дорогой ( k ) (который может быть вызван изменениями поверхности дороги, условиями окружающей среды или погодой) и различными шинами на ведущие и ведомые колеса.
Два параметра, которые могут повлиять на работу АБС во время испытания тормозных характеристик, — это непостоянный коэффициент сцепления шины с дорогой ( k ) (который может быть вызван изменениями поверхности дороги, условиями окружающей среды или погодой) и различными шинами на ведущие и ведомые колеса.
Взаимосвязь между сцеплением шины с дорогой (в форме коэффициента тормозного усилия, BFC) и тормозным скольжением была представлена в главе 3; На рисунке 3.12 показана типичная характеристика сцепления шины с дорогой. Для каждой отдельной кривой есть точка, в которой развивается максимальная BFC, известная как «пиковая адгезия», и одним из способов количественной оценки эффективности ABS было бы сравнение скорости торможения транспортного средства с циклической работой ABS с максимальная скорость торможения, которую может обеспечить автомобиль без АБС и без блокировки колес, т.е.е. со всеми колесами с максимальным сцеплением. Поскольку сцепление шины с дорогой является переменным, максимальная тормозная сила, создаваемая колесом при пиковом сцеплении, также является переменной, поскольку она может возникать при разных уровнях скольжения от колеса к колесу. Кроме того, максимальная тормозная сила на каждом отдельном опорном колесе зависит от динамической нормальной силы на этом колесе (уравнение (3.9)), которая изменяется как в поперечном, так и в продольном направлении из-за передачи динамической нагрузки. Следовательно, оценить максимально достижимую скорость торможения без АБС очень сложно, потому что маловероятно, что все колеса будут иметь пиковое сцепление одновременно.
Кроме того, максимальная тормозная сила на каждом отдельном опорном колесе зависит от динамической нормальной силы на этом колесе (уравнение (3.9)), которая изменяется как в поперечном, так и в продольном направлении из-за передачи динамической нагрузки. Следовательно, оценить максимально достижимую скорость торможения без АБС очень сложно, потому что маловероятно, что все колеса будут иметь пиковое сцепление одновременно.
Сравнение эффективности торможения автомобиля при работе ABS с максимальной скоростью торможения, достижимой при отключенной ABS, но без блокировки колес, может привести к тому, что рабочие характеристики ABS явно превысят максимальную скорость торможения при отключенной ABS, что физически невозможно. Это может происходить из-за того, что одно или несколько опорных катков, вероятно, будут работать ниже пикового сцепления при отключенной АБС, тогда как при работе АБС все колеса работают с пиковым сцеплением (или очень близко к нему).Чтобы избежать этого, процедуры испытаний, указанные в Правилах 13 ООН для оценки характеристик транспортного средства, оборудованного АБС, требуют, чтобы эффективность АБС измерялась как на поверхностях с высоким, так и на слабом сцеплении как в груженом, так и в порожнем состоянии. Для дорожного покрытия с высокой адгезией пиковое сцепление должно быть около 0,8, а пиковое сцепление с поверхностью с низким сцеплением должно быть максимум 0,3 (применяются дополнительные требования, чтобы гарантировать, что оно не слишком низкое, а пиковое сцепление хорошее. определено, и что коэффициент сцепления не зависит от скорости).Единственное другое требование — отношение максимальной адгезии к сцеплению при 100% скольжении колеса ( μ t ) составляет от 1 до 2. Базальтовая поверхность обычно используется для испытаний ABS с низкой адгезией; для этого требуется вода, чтобы уменьшить адгезию, но около 100% проскальзывания колеса адгезия увеличивается, как показано на Рисунке 11.6. В результате отношение максимальной адгезии к сцеплению при 100% скольжении колеса часто очень близко к минимальному значению 1.
Для дорожного покрытия с высокой адгезией пиковое сцепление должно быть около 0,8, а пиковое сцепление с поверхностью с низким сцеплением должно быть максимум 0,3 (применяются дополнительные требования, чтобы гарантировать, что оно не слишком низкое, а пиковое сцепление хорошее. определено, и что коэффициент сцепления не зависит от скорости).Единственное другое требование — отношение максимальной адгезии к сцеплению при 100% скольжении колеса ( μ t ) составляет от 1 до 2. Базальтовая поверхность обычно используется для испытаний ABS с низкой адгезией; для этого требуется вода, чтобы уменьшить адгезию, но около 100% проскальзывания колеса адгезия увеличивается, как показано на Рисунке 11.6. В результате отношение максимальной адгезии к сцеплению при 100% скольжении колеса часто очень близко к минимальному значению 1.
Рисунок 11.6.Характеристики мокрого базальта для шин и дорог (Росс, 2013).
Поскольку ABS действует, ослабляя усилие срабатывания тормоза, когда обнаруживается чрезмерное проскальзывание колес или неизбежная блокировка, по определению невозможно достичь 100% использования сцепления при работе ABS, и поэтому считается, что фактический тормозной путь с ABS рабочая будет больше теоретического минимума. Правило 13 ООН требует, чтобы на поверхностях с низким и высоким сцеплением «используемая адгезия» (ε) была ≥0.75 (груженый и порожний). В этом случае используемое сцепление определяется уравнением (11.2), где z AL — максимальная измеренная скорость торможения с работающей АБС, а k M — коэффициент шины / дороги. адгезии. Например, на рисунке 11.6 пиковая адгезия составляет 0,26; следовательно, скорость торможения, достигаемая при включении ABS, должна быть z AL ≥ 0,195 (= 0,26 × 0,75).
Правило 13 ООН требует, чтобы на поверхностях с низким и высоким сцеплением «используемая адгезия» (ε) была ≥0.75 (груженый и порожний). В этом случае используемое сцепление определяется уравнением (11.2), где z AL — максимальная измеренная скорость торможения с работающей АБС, а k M — коэффициент шины / дороги. адгезии. Например, на рисунке 11.6 пиковая адгезия составляет 0,26; следовательно, скорость торможения, достигаемая при включении ABS, должна быть z AL ≥ 0,195 (= 0,26 × 0,75).
(11.2) ε = zALkM
Здесь представлена методика измерения эффективности ABS любого дорожного транспортного средства, которая состоит из двух частей: измерения тормозных характеристик ABS дорожного транспортного средства и измерения пикового значения сцепления. При измерении характеристик АБС необходимо учитывать только ту часть события торможения, когда АБС управляет колесами; когда тормоза нажимаются впервые, АБС не контролирует, потому что давление срабатывания в начале нажатия тормоза возрастает очень быстро, что приводит к сильному замедлению колеса и проскальзыванию. После того, как АБС отреагировала на это состояние и начала управлять колесами, можно начинать оценку работы системы. Точно так же, когда скорость транспортного средства приближается к нулю, невозможно точно оценить пробуксовку колес (см. Рисунок 11.7), поэтому эту часть события торможения также не следует включать.
После того, как АБС отреагировала на это состояние и начала управлять колесами, можно начинать оценку работы системы. Точно так же, когда скорость транспортного средства приближается к нулю, невозможно точно оценить пробуксовку колес (см. Рисунок 11.7), поэтому эту часть события торможения также не следует включать.
Рисунок 11.7. Скорость автомобиля, скорость колеса и давление срабатывания тормоза в зависимости от времени во время работы АБС (Росс, 2013).
Процедура испытания для измерения характеристик АБС кратко описана ниже, а установленные параметры скорости приведены в Таблице 11.1. Требуются три измерения на каждой испытательной поверхности для каждого условия нагрузки, и среднее время замедления между заданными скоростями используется для расчета скорости торможения и динамических нагрузок на ось, из которых рассчитывается пиковое сцепление для всего транспортного средства, как описано ниже. Уровень замедления должен позволять ABS работать полностью, например передняя ось может начать работу ABS, но по мере передачи динамической нагрузки нагрузка на эту ось увеличивается, а проскальзывание уменьшается.
Таблица 11.1. Параметры скорости для измерения эффективности АБС
| Работоспособность АБС; Измеренные параметры скорости | Индивидуальные или буксируемые автомобили | Прицепы ∗ |
|---|---|---|
| Скорость, при которой тормоза включаются впервые (км / ч) | 55 | 50 |
| Измерение скорости начинается (км / ч) | 45 | 40 |
| Скорость, при которой прекращается измерение характеристик АБС (км / ч) | 15 | 20 |
- •
Подойдите к испытательной зоне скорость выше скорости включения тормоза.
- •
Выключите двигатель (выберите нейтральную передачу) и выбегите до требуемой скорости включения тормоза (Таблица 11.1).
- •
Затяните тормоз.
Регистрируемые данные включают:
- •
Скорость автомобиля
- •
Скорость вращения колес (все колеса)
- •
Требование водителя (например, гидравлическая или пневматическая система срабатывания) давление на регуляторе)
- •
Давление срабатывания на каждом тормозном приводе.

Тесты производительности ABS и тесты для определения максимальной адгезии должны проводиться как можно ближе друг к другу, и предпочтительно сначала завершить тесты ABS, чтобы избежать какого-либо влияния разницы температур между тормозами. Определение пикового сцепления может привести к высоким температурам тормозов, и, поскольку каждая ось испытывается независимо, значительная разница температур между осями может повлиять на эффективность торможения транспортного средства и, следовательно, на АБС.
Измерение максимального значения сцепления для автомобиля ( k M ) начинается с измерения максимального сцепления для передней и задней оси независимо. Давление срабатывания заторможенной оси постепенно увеличивается до тех пор, пока время замедления между двумя скоростями (как показано в Таблице 11.2) без блокировки колеса не будет сведено к минимуму. Использование сцепления на каждом колесе на любой оси всегда будет разным из-за поперечных различий в коэффициенте сцепления ( k ), фактических тормозных характеристиках и динамических нагрузках на колеса, поэтому для измерения характеристик ABS индивидуальное давление срабатывания требуется регулировка каждого тормоза на оси. Порядок проведения испытаний:
Порядок проведения испытаний:
Таблица 11.2. Параметры скорости для измерения пикового сцепления
| Измерение производительности ABS Параметры скорости | Индивидуальные или буксируемые автомобили | Прицепы |
|---|---|---|
| Скорость, при которой тормоза включаются впервые (км / ч) | 50 | |
| Скорость, при которой начинается измерение пикового сцепления (км / ч) | 40 | 40 |
| Скорость, при которой прекращается измерение пикового сцепления (км / ч) | 20 | 20 |
Для всех типов транспортных средств задействуйте тормоза на начальной скорости 50 км / ч.
Запишите время замедления автомобиля с 40 до 20 км / ч без блокировки колес.
Затем рассчитывается пиковое сцепление с минимальным временем замедления ( t мин ). Правило 13 ООН требует трех значений: т мин , которые должны быть получены в пределах 1,05 т мин , но если это недостижимо, также разрешается использовать наименьшее время замедления т мин .Использование самого низкого значения обеспечивает максимальную скорость торможения и, следовательно, более репрезентативно для пикового сцепления.
Правило 13 ООН требует трех значений: т мин , которые должны быть получены в пределах 1,05 т мин , но если это недостижимо, также разрешается использовать наименьшее время замедления т мин .Использование самого низкого значения обеспечивает максимальную скорость торможения и, следовательно, более репрезентативно для пикового сцепления.
Пример типа данных, записанных во время измерения пикового сцепления на грузовом автомобиле, оснащенном пневматическим тормозом, показан на рисунке 11.8. В этом конкретном испытании использовалось контролируемое торможение в сочетании с оставшейся работоспособной АБС (что разрешено Правилом 13 ООН), чтобы помочь избежать проблем реакции колеса на начальной стадии торможения, когда быстрое повышение давления срабатывания может привести к колесо превышает пиковое сцепление и достигает блокировки.На рисунке 11.8 показано, что цикл ABS начинается вскоре после 50 км / ч, но прекращается на 40 км / ч, когда начинается измерение пикового сцепления, и никогда не возобновляется. Для сравнения, рисунок 11.9 иллюстрирует ситуацию, когда цикл ABS возобновляется при скорости ниже 20 км / ч, но снова ABS не работает в диапазоне измерения скорости 20–40 км / ч. Бывают случаи, когда невозможно предотвратить блокировку колес или срабатывание АБС в диапазоне измерения скорости 20–40 км / ч без снижения давления срабатывания тормоза до уровня, который влияет на пиковое замедление сцепления, что искусственно увеличивает эффективность АБС. .Эту проблему можно решить, отклонившись от предписанной процедуры и не записывая фактическое время замедления с 40 до 20 км / ч, а путем экстраполяции участка наклона скорости транспортного средства, чтобы получить более реалистичное время замедления. Это, скорее всего, потребуется во время испытаний на низкую адгезию. После достижения пикового сцепления с одной осью процедура повторяется для другой оси.
Для сравнения, рисунок 11.9 иллюстрирует ситуацию, когда цикл ABS возобновляется при скорости ниже 20 км / ч, но снова ABS не работает в диапазоне измерения скорости 20–40 км / ч. Бывают случаи, когда невозможно предотвратить блокировку колес или срабатывание АБС в диапазоне измерения скорости 20–40 км / ч без снижения давления срабатывания тормоза до уровня, который влияет на пиковое замедление сцепления, что искусственно увеличивает эффективность АБС. .Эту проблему можно решить, отклонившись от предписанной процедуры и не записывая фактическое время замедления с 40 до 20 км / ч, а путем экстраполяции участка наклона скорости транспортного средства, чтобы получить более реалистичное время замедления. Это, скорее всего, потребуется во время испытаний на низкую адгезию. После достижения пикового сцепления с одной осью процедура повторяется для другой оси.
Рисунок 11.8. АБС управляет начальным замедлением колеса при нажатии на педаль тормоза, но не работает в промежутке между скоростями. Измеряется эффективность АБС (Росс, 2013).
Измеряется эффективность АБС (Росс, 2013).
Рисунок 11.9. АБС работает при скорости ниже 20 км / ч, но не работает на разных скоростях. Производительность АБС измеряется (Росс, 2013).
Пиковое замедление сцепления для каждой оси можно рассчитать следующим образом:
(11,3) zm = 0,566 / tm
где:
z m — скорость торможения транспортного средства;
t м — минимальное время замедления, измеренное между 40 и 20 км / ч.
Для определения максимальной скорости сцепления при торможении из скорости торможения транспортного средства ( z м ) необходимо принять сопротивление качению незатормозных колес и динамическую передачу нагрузки на или от проверяемой оси. в учетную запись. Для передней оси:
(11,4) kf = [zmMg− (Сопротивление качению задней оси без тормозов · P2) [P1 + (hE) zmMg]
И для задней оси:
(11,5) kr = [zmMg− (Сопротивление качению передней оси · без тормозов) [P2− (hE) zmMg]
Сопротивление качению определяется как скорость торможения ( z ) транспортного средства, относящаяся к каждой оси, которая определена в Правилах 13 ООН как:
- •
Управляемый ось = 0.
 015
015- •
Неприводная ось = 0,010.
Соответствующие значения пикового сцепления, рассчитанные по уравнениям (11.4) и (11.5), не используются напрямую для определения эффективности АБС транспортного средства, поскольку они должны быть взвешены в соответствии с динамическими нагрузками на ось, связанными с испытаниями, когда АБС работает. на всей остановке. Для определения эффективности АБС среднее время замедления транспортного средства с 45 до 15 км / ч по результатам трех испытаний ( т м ) и средняя скорость торможения ( z AL ) рассчитывается по формуле:
(11.6) zAL = (0,849tm)
Используя скорость торможения ( z AL ), соответствующие динамические осевые нагрузки рассчитываются с использованием уравнений (11.7) и (11.8) (см. Уравнения (3.2) и (3.3) (3,2) (3,3)):
(11,7) Передняя ось: N1 = P1 + PzALhE
(11,8) Передняя ось: N2 = P2 − PzALhE
Пиковая скорость торможения с сцеплением для передней оси ( k f ) и задний мост ( k r ) затем взвешиваются в соответствии с распределением динамической нагрузки с использованием уравнения (11. 9) для получения максимальной скорости адгезионного торможения для всего транспортного средства ( k M ):
9) для получения максимальной скорости адгезионного торможения для всего транспортного средства ( k M ):
(11,9) kM = kfN1 + krN2P
Эффективность торможения ABS ( η ) определяется по формуле (11.10) и должно быть не менее 0,75 (с грузом и без груза) — см. Уравнение (11.2).
(11.10) η = zALkM
Оценка коэффициента трения дороги в различных дорожных условиях на основе динамики торможения транспортного средства | Китайский журнал машиностроения
Расчет тормозного момента
Коэффициент продольного скольжения передних и задних колес можно описать как.
$$ \ lambda _ {\ text {f}} = \ frac {{V — \ omega _ {\ text {f}} R _ {\ omega}}} {V}, $$
(6)
$$ \ lambda _ {\ text {r}} = \ frac {{V — \ omega _ {\ text {r}} R _ {\ omega}}} {V}, $$
(7)
где λ f и λ r обозначает коэффициент продольного скольжения переднего и заднего колес соответственно, и производная которого по времени, соответственно, определяется выражением.
$$ \ dot {\ lambda} _ {\ text {f}} = \ frac {{\ dot {V} (1 — \ lambda _ {\ text {f}}) — \ dot {\ omega} _ { \ text {f}} R _ {\ omega}}} {V}, $$
(8)
$$ \ dot {\ lambda} _ {\ text {r}} = \ frac {{\ dot {V} (1 — \ lambda _ {\ text {r}}) — \ dot {\ omega} _ {\ текст {r}} R _ {\ omega}}} {V}. $$
(9)
Подставляя уравнения. (8), (9) в уравнение динамики транспортного средства, тогда
$$ \ dot {V} = f_ {2} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}), $ $
(10)
$$ \ dot {\ lambda} _ {\ text {f}} = \ frac {{f_ {2} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) (1 — \ lambda _ {\ text {f}}) — R _ {\ omega} f_ {3} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) + u _ {\ text {f}} }} {V}, $$
(11)
$$ \ dot {\ lambda} _ {\ text {r}} = \ frac {{f_ {2} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) (1 — \ lambda _ {\ text {r}}) — R _ {\ omega} f_ {4} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) + u _ {\ text {r}} }} {V}, $$
(12)
, где
$$ f_ {2} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) = — g \ frac {{\ mu (\ lambda _ {\ text {f}) }) m_ {1} + \ mu (\ lambda _ {\ text {r}}) m_ {2}}} {{m — \ mu (\ lambda _ {\ text {f}}) m_ {3} + \ mu (\ lambda _ {\ text {r}}) m_ {3}}}, $$
$$ f_ {3} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) = \ frac {1} {{2J _ {\ text {f}}}} (\ mu ( \ lambda _ {\ text {f}}) m_ {1} R _ {\ omega} g — \ mu (\ lambda _ {\ text {f}}) m_ {3} R _ {\ omega} f_ {2}), $ $
$$ f_ {4} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) = \ frac {1} {{2J _ {\ text {r}}}} (\ mu ( \ lambda_ {r}) m_ {2} R _ {\ omega} g + \ mu (\ lambda _ {\ text {r}}) m_ {3} R _ {\ omega} f_ {2}), $$
$$ u _ {\ text {f}} = \ frac {{T _ {\ text {bf}} R _ {\ omega}}} {{2J _ {\ text {f}}}}, \; \; \; \; u _ {\ text {r}} = \ frac {{T _ {\ text {br}} R _ {\ omega}}} {{2J _ {\ text {r}}}}. {+ }.{+}} \ right \}. $$
{+ }.{+}} \ right \}. $$
(26)
Определите разницу между фактическим и заданным коэффициентом скольжения передних и задних колес как поверхность переключения режима скольжения. Уравнения можно описать как
$$ S_ {1} = \ tilde {\ lambda} _ {\ text {f}} = \ lambda _ {\ text {f}} — \ lambda _ {\ text {fd}}, $
(27)
$$ S_ {2} = \ tilde {\ lambda} _ {\ text {r}} = \ lambda _ {\ text {r}} — \ lambda _ {\ text {rd}}, $$
(28)
где λ f и λ r обозначает фактический коэффициент скольжения передних и задних колес соответственно, λ fd и λ rd обозначает целевой коэффициент скольжения передних и задних колес соответственно. Чтобы достичь эквивалентного управляющего момента, производная формул. (27), (28) относительно времени соответственно даются как
Чтобы достичь эквивалентного управляющего момента, производная формул. (27), (28) относительно времени соответственно даются как
$$ T _ {{{\ text {eq}}. {\ text {bf}}}} = \ frac {{2J _ {\ text {f}}}} {{R _ {{{\ omega}}}}}} \ left [{\ dot {\ lambda} _ {\ текст {fd}} V — \ hat {f} _ {2} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) (1 — \ lambda _ {\ text {f}}) + R _ {{{\ omega}}} \ hat {f} _ {3} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}})} \ right], $$
(29)
$$ T _ {{{\ text {eq}}.{\ text {br}}}} = \ frac {{2J _ {\ text {r}}}} {{R _ {{{\ omega}}}}}} \ left [{\ dot {\ lambda} _ {\ текст {rd}} V — \ hat {f} _ {2} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) (1 — \ lambda _ {\ text {r}}) + R _ {{{\ omega}}} \ hat {f} _ {4} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}})} \ right], $$
(30)
Тормозной момент передних и задних колес равен
$$ T _ {\ text {b}} = T _ {{{\ text {eq}}. {\ text {b}}}} — k \ text {sgn} (S). $$
{\ text {b}}}} — k \ text {sgn} (S). $$
(31)
По условиям доступности коммутационной поверхности должно выполняться неравенство:
Идеальный тормозной момент передних и задних колес определяется как
$$ T _ {\ text {bf}} = \ frac {{2J _ {\ text {f}}}} {{R _ {{{\ omega}} }}} \ left [\ begin {align} & \ dot {\ lambda} _ {\ text {fd}} V — \ hat {f} _ {2} (\ lambda _ {\ text {f}}, \ lambda_ {\ text {r}}) (1 — \ lambda _ {\ text {f}}) + R _ {{{\ omega}}} \ hat {f} _ {3} (\ lambda _ {\ text {f}} , \ lambda _ {\ text {r}}) \\ & — (F _ {\ text {f}} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) + \ eta_ {1 }) \ text {sgn} (S_ {1}) \\ \ end {align} \ right], $$
(33)
$$ T _ {\ text {br}} = \ frac {{2J _ {\ text {r}}}} {{R _ {{{\ omega}}}}}} \ left [\ begin {align} & \ dot {\ lambda} _ {\ text {rd}} V — \ hat {f} _ {2} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) (1 — \ lambda_ { \ text {r}}) + R _ {{{\ omega}}} \ hat {f} _ {4} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) \\ & — (F _ {\ text {r}} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) + \ eta_ {2}) \ text {sgn} (S_ {2}) \ \ \ end {align} \ right]. $
$
(34)
соответственно
$$ F _ {\ text {f}} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) = F_ {2} (1 — \ lambda _ {\ text {f }}) + R _ {{\ omega}}} F_ {3}, $$
$$ F _ {\ text {r}} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) = F_ {2} (1 — \ lambda _ {\ text {r}}) + R _ {{{\ omega}}} F_ {4}, $$
, где η 1 , η 2 — положительные константы.
Устранение вибрации
Явление вибрации является одним из нежелательных эффектов управления скользящим режимом. Чтобы устранить явление дребезга при управлении в скользящем режиме, была введена насыщенная функция sat ( S / φ ), а контроллер скользящего режима был переработан с использованием интегральной переключающей поверхности, чтобы сделать закон управления плавным [24]. Определение интегральной поверхности переключения как
$$ S_ {1} = \ lambda _ {\ text {f}} — \ lambda _ {\ text {fd}} + \ xi_ {1} \ int {(\ lambda _ {\ text {f }} — \ lambda _ {\ text {fd}}}) {\ text {d}} t, $$
(35)
$$ S_ {2} = \ lambda _ {\ text {r}} — \ lambda _ {\ text {rd}} + \ xi_ {2} \ int {(\ lambda _ {\ text {r}} — \ lambda_ { \ text {rd}}}) {\ text {d}} t, $$
(36)
где ξ 1 и ξ 2 — постоянные.
Используя метод интегральной переключающей поверхности, идеальный тормозной момент передних и задних колес, соответственно, определяется как
$$ \ begin {align} T _ {\ text {bf}} = \ hfill \\ \; \ ; \; \; \ frac {{2J _ {\ text {f}}}} {{R _ {{{\ omega}}}}} \ left [\ begin {align} & (\ dot {\ lambda} _ { \ text {fd}} — \ xi_ {1} \ tilde {\ lambda} _ {\ text {f}}) V — \ hat {f} _ {2} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) (1 — \ lambda _ {\ text {f}}) + R _ {{{\ omega}}} \ hat {f} _ {3} (\ lambda _ {\ text {f} }, \ lambda _ {\ text {r}}) \ hfill \\ & — (F _ {\ text {f}} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) + \ eta_ {1}) \ text {sat} \ left ({\ frac {{\ tilde {\ lambda} _ {\ text {f}} + \ xi_ {1} \ int {\ tilde {\ lambda} _ {\ текст {f}} {\ text {d}} t}}} {{\ varphi_ {1}}}} \ right) \ hfill \\ \ end {выровнен} \ right], \ hfill \\ \ end {выровнен } $$
(37)
$$ \ begin {align} T _ {\ text {br}} = \ hfill \\ \; \; \; \ frac {{2J _ {\ text {r}}}} {{R _ {{{\ omega} }}}} \ left [\ begin {align} & (\ dot {\ lambda} _ {\ text {rd}} — \ xi_ {2} \ tilde {\ lambda} _ {\ text {r}}) V — \ hat {f} _ {2} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) (1 — \ lambda _ {\ text {r}}) + R _ {{{\ omega}}} \ hat {f} _ {4} (\ lambda _ {\ text {f}}, \ lambda _ {\ text {r}}) \\ & — (F _ {\ text {r}} (\ lambda_ {\ text {f}}, \ lambda _ {\ text {r}}) + \ eta_ {2}) \ text {sat} \ left ({\ frac {{\ tilde {\ lambda} _ {\ text {r }} + \ xi_ {2} \ int {\ tilde {\ lambda} _ {\ text {r}} {\ text {d}} t}}} {{\ varphi_ {2}}}} \ right) \ \ \ end {выравнивается} \ right], \ hfill \\ \ end {выравнивается} $$
(38)
где φ 1 и φ 2 — постоянные, φ 1 и φ 2 — это толщина пограничного слоя, которая изменяется, чтобы использовать полосу пропускания системы. Как получить значения представлены в Ref. [23].
Как получить значения представлены в Ref. [23].
Модель поддержки принятия решений для оценки эффективности торможения на взлетно-посадочных полосах, загрязненных снегом и льдом
Основные моменты
- •
Предлагается модель поддержки принятия решений, чтобы помочь инспекторам ВПП оценить эффективность торможения на ВПП, загрязненных зимой.
- •
Модель сравнивается с испытанным тормозным действием коммерческих самолетов, находящихся в эксплуатации.
- •
Модель работает лучше, чем прогнозы, сделанные инспекторами взлетно-посадочной полосы или измерения сцепления.
Реферат
Пилотам необходимы точные прогнозы качества поверхности взлетно-посадочной полосы при работе на взлетно-посадочных полосах, загрязненных снегом / льдом. Эти прогнозы обычно делаются на основе измерений сцепления или экспертных заключений инспекторов ВПП. В этом исследовании представлена модель поддержки принятия решений (модель взлетно-посадочной полосы IRIS) для инспекторов взлетно-посадочной полосы, которая интерпретирует описательные данные из отчетов SNOWTAM и прогнозирует тормозное действие по общей шкале от 1 до 5, в диапазоне от «плохо» до «хорошо».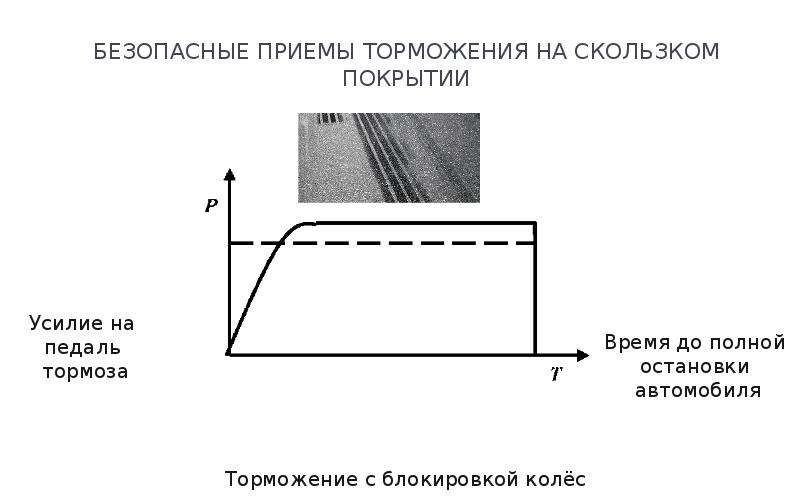 Модель тестируется в двух аэропортах Норвегии в зимний период с 2008/2009 по 2010/2011 годы. Также были включены два других предиктора тормозного действия (оценки инспекторов ВПП и измерения сцепления). Анализ 1261 приземления коммерческих самолетов с ограничением трения использовался для сравнения прогнозируемых и измеренных тормозных действий.
Модель тестируется в двух аэропортах Норвегии в зимний период с 2008/2009 по 2010/2011 годы. Также были включены два других предиктора тормозного действия (оценки инспекторов ВПП и измерения сцепления). Анализ 1261 приземления коммерческих самолетов с ограничением трения использовался для сравнения прогнозируемых и измеренных тормозных действий.
Модель взлетно-посадочной полосы IRIS оказалась более консервативной, чем оценки норвежских инспекторов взлетно-посадочной полосы, и даже более консервативной, чем измерения сцепления.В 86% посадок модель взлетно-посадочной полосы IRIS спрогнозировала условия в пределах ± 1 категории от того, что испытали самолеты, по сравнению с 77%, достигнутыми инспекторами взлетно-посадочной полосы. Предсказания устройств измерения сцепления были наименее консервативными и предсказывали условия в пределах ± 1 категории в 61% приземлений. В настоящее время модель внедрена в 15 аэропортах Норвегии.
Ключевые слова
Зимние загрязненные взлетно-посадочные полосы
Измерения трения
Тормозное действие
Тормозные характеристики
Рекомендуемые статьиЦитирующие статьи (0)
Просмотреть аннотацию Copyright © 2015 Авторы. Литература по PADbDIXCEL
Литература по PADbDIXCEL
Одним из важных критериев при оценке тормозных колодок является «коэффициент трения». Коэффициент трения — это отношение силы трения между двумя поверхностями и силы, прижимающей их друг к другу. Чем меньше коэффициент трения, тем меньше сила, необходимая для скольжения двух поверхностей. Чем выше коэффициент трения, тем сильнее сила, необходимая для скольжения двух поверхностей. Коэффициент трения равен 1, когда требуется 100 кг силы (параллельно земле) для перемещения объекта весом 100 кг.Если тот же объект можно переместить с силой 50 кг. Коэффициент трения 0,5. При расчете коэффициента трения при торможении автомобиля используется тормозной момент, возникающий при торможении, и давление жидкости, необходимое для прижатия тормозной колодки.
Обычно тормозные колодки OEM имеют коэффициент трения 0,3-0,4, а рабочие тормозные колодки имеют коэффициент трения 0,4-0,5. Чем выше коэффициент трения, тем меньшее давление жидкости (более легкое нажатие на педаль тормоза) требуется для создания высокого тормозного усилия. Если коэффициент трения слишком высокий, возникает слишком большое трение и очень трудно тормозить. Наиболее важным фактором для коэффициента трения является достижение тормозными колодками максимального уровня трения сразу после нажатия на педаль тормоза. Если начальное тормозное усилие плохое, это обычно называют тормозными колодками, которые не работают должным образом (плохой начальный прикус). Второй важный фактор — стабильность коэффициента трения при различных температурах.Обычно коэффициент трения ниже при низких и очень высоких температурах. Это проблема, потому что при слишком низкой температуре тормозной мощности будет недостаточно для движения по улице. Еще одна проблема — снижение коэффициента трения при экстремально высоких температурах. Пользователи, которые ездят по гоночным трассам, нуждаются в стабильной тормозной мощности даже в таких условиях. Качественные гоночные тормозные колодки будут иметь стабильную работу от начала до конца. Третий важный фактор — стабильность коэффициента трения на разных скоростях движения автомобиля.
Если коэффициент трения слишком высокий, возникает слишком большое трение и очень трудно тормозить. Наиболее важным фактором для коэффициента трения является достижение тормозными колодками максимального уровня трения сразу после нажатия на педаль тормоза. Если начальное тормозное усилие плохое, это обычно называют тормозными колодками, которые не работают должным образом (плохой начальный прикус). Второй важный фактор — стабильность коэффициента трения при различных температурах.Обычно коэффициент трения ниже при низких и очень высоких температурах. Это проблема, потому что при слишком низкой температуре тормозной мощности будет недостаточно для движения по улице. Еще одна проблема — снижение коэффициента трения при экстремально высоких температурах. Пользователи, которые ездят по гоночным трассам, нуждаются в стабильной тормозной мощности даже в таких условиях. Качественные гоночные тормозные колодки будут иметь стабильную работу от начала до конца. Третий важный фактор — стабильность коэффициента трения на разных скоростях движения автомобиля. Тормозные колодки будут опасны, если при торможении на скорости 60 км / ч будет достигнут стабильный коэффициент трения, но нестабильный при 180 км / ч, продажа продукта будет невозможна. В DIXCEL мы постоянно проводим исследования и разработки, чтобы создать тормозную смесь со стабильным, но высоким коэффициентом трения. Для увеличения коэффициента трения и стабилизации тормозной смеси очень популярны такие материалы, как бронза, стальное волокно, стекловолокно, кевлар, керамика, титан, углерод и т. Д. Перед каждым производителем тормозов постоянно стоит задача сделать из смеси материалов лучшую тормозную колодку.
Тормозные колодки будут опасны, если при торможении на скорости 60 км / ч будет достигнут стабильный коэффициент трения, но нестабильный при 180 км / ч, продажа продукта будет невозможна. В DIXCEL мы постоянно проводим исследования и разработки, чтобы создать тормозную смесь со стабильным, но высоким коэффициентом трения. Для увеличения коэффициента трения и стабилизации тормозной смеси очень популярны такие материалы, как бронза, стальное волокно, стекловолокно, кевлар, керамика, титан, углерод и т. Д. Перед каждым производителем тормозов постоянно стоит задача сделать из смеси материалов лучшую тормозную колодку.
Влияние переменного коэффициента трения дисковых накладок на механическую тормозную систему железнодорожного транспортного средства
Abstract
Система имитационного моделирования тормозов (HILS) для железнодорожного подвижного состава широко применяется для оценки и проверки эффективности торможения в исследовательских исследованиях и полевых испытаниях. Когда мы разрабатываем имитационную модель для всей системы транспортного средства, характеристики всех компонентов, как правило, должным образом упрощаются на основе понимания назначения каждого компонента и взаимодействия с другими компонентами.Коэффициент трения между тормозным диском и колодкой, используемый в моделировании, традиционно считался постоянным, а влияние переменного коэффициента трения игнорировалось с предположением, что изменчивость очень мало влияет на характеристики торможения транспортного средства. Однако коэффициент трения колодки диска значительно изменяется в пределах диапазона из-за условий окружающей среды, и, таким образом, коэффициент трения может значительно повлиять на работу тормозов, особенно на скольжении колеса.В этой статье мы применяем переменный коэффициент трения и анализируем влияние переменного коэффициента трения на механическую тормозную систему железнодорожного транспортного средства. Мы вводим математическую формулу для переменного коэффициента трения, в которой переменное трение представлено двумя переменными и пятью параметрами.
Когда мы разрабатываем имитационную модель для всей системы транспортного средства, характеристики всех компонентов, как правило, должным образом упрощаются на основе понимания назначения каждого компонента и взаимодействия с другими компонентами.Коэффициент трения между тормозным диском и колодкой, используемый в моделировании, традиционно считался постоянным, а влияние переменного коэффициента трения игнорировалось с предположением, что изменчивость очень мало влияет на характеристики торможения транспортного средства. Однако коэффициент трения колодки диска значительно изменяется в пределах диапазона из-за условий окружающей среды, и, таким образом, коэффициент трения может значительно повлиять на работу тормозов, особенно на скольжении колеса.В этой статье мы применяем переменный коэффициент трения и анализируем влияние переменного коэффициента трения на механическую тормозную систему железнодорожного транспортного средства. Мы вводим математическую формулу для переменного коэффициента трения, в которой переменное трение представлено двумя переменными и пятью параметрами.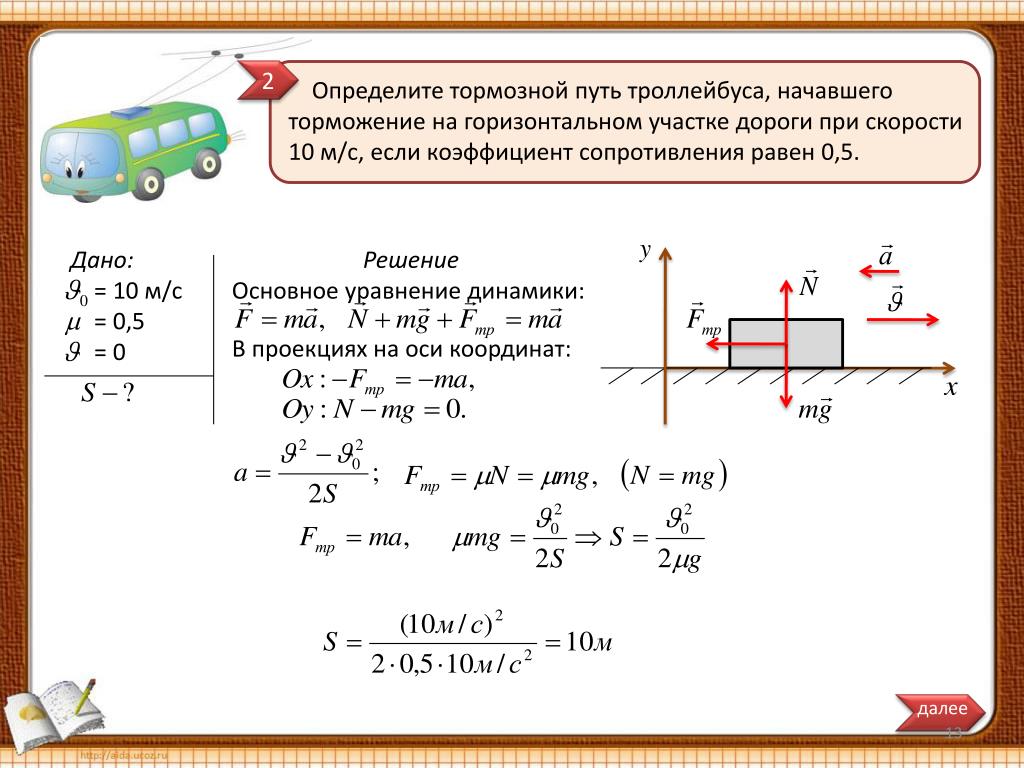 Предлагаемая формула применяется к моделированию в реальном времени с использованием тормозной системы HILS, а эффективность формулы проверяется экспериментально путем тестирования механических характеристик торможения тормозной системы HILS.
Предлагаемая формула применяется к моделированию в реальном времени с использованием тормозной системы HILS, а эффективность формулы проверяется экспериментально путем тестирования механических характеристик торможения тормозной системы HILS.
Образец цитирования: Ли Н. Дж., Канг К. Г. (2015) Влияние переменного коэффициента трения колодки диска на механическую тормозную систему железнодорожного транспортного средства. PLoS ONE 10 (8): e0135459. https://doi.org/10.1371/journal.pone.0135459
Редактор: Мин Дао, Массачусетский технологический институт, США
Поступила: 21 февраля 2015 г .; Одобрена: 23 июля 2015 г .; Опубликовано: 12 августа 2015 г.
Авторские права: © 2015 Lee, Kang.Это статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии указания автора и источника
Доступность данных: Все соответствующие данные находятся в пределах бумага.
Финансирование: Эта работа была поддержана Университетом Конкук (http://www.konkuk.ac.kr) в 2014 г. (номер гранта 2014-A019-0133). Финансирующий университет Конкук не участвовал в разработке исследования, сборе и анализе данных, принятии решения о публикации или подготовке рукописи.Финансирующая компания Hyundai-Rotem Company (http://www.hyundai-rotem.co.kr) оказывала поддержку в виде заработной платы автору Нам-Джин Ли, но не играла никакой дополнительной роли в дизайне исследования, сборе данных и анализ, решение о публикации или подготовка рукописи.
Конкурирующие интересы: Авторы заявили, что конкурирующих интересов не существует. Компания Hyundai-Rotem не изменяет приверженности авторов политике PLOS ONE в отношении обмена данными и материалами.
Введение
Трудно и сложно оценить эффективность тормозной системы железнодорожного транспортного средства в условиях движения транспортного средства, поскольку опасно тестировать различные аварийные ситуации. Тормозная система состоит из многих компонентов, таких как электронные блоки управления, пневматические рабочие блоки, механические тормозные приводы и фрикционные материалы, и они динамически взаимодействуют друг с другом [1,2]. Аппаратное моделирование (HILS) железнодорожного транспортного средства считается одним из решений для снижения рисков и затрат на полевые испытания работающего железнодорожного транспортного средства. В последнее время сообщалось о разнообразных применениях системы HILS, особенно в области тормозных систем транспортных средств [3–6].
Тормозная система состоит из многих компонентов, таких как электронные блоки управления, пневматические рабочие блоки, механические тормозные приводы и фрикционные материалы, и они динамически взаимодействуют друг с другом [1,2]. Аппаратное моделирование (HILS) железнодорожного транспортного средства считается одним из решений для снижения рисков и затрат на полевые испытания работающего железнодорожного транспортного средства. В последнее время сообщалось о разнообразных применениях системы HILS, особенно в области тормозных систем транспортных средств [3–6].
Тормозная система HILS обычно состоит из двух отдельных частей. Одна часть содержит программные средства моделирования, используемые для реализации математических моделей динамики движущегося вагона в реальном времени, а другая часть содержит фактическое оборудование тормозного блока, используемого в реальном железнодорожном транспортном средстве. Интерфейс между двумя частями должен обеспечивать среду, аналогичную реальным соединениям, существующим в железнодорожном транспортном средстве.
Производительность тормозной системы HILS зависит от точности математических моделей моделирования в реальном времени, а также точности реализации в реальном времени (например,g., задержка). Когда мы разрабатываем имитационную модель для всей системы транспортного средства, характеристики всех компонентов, как правило, упрощаются должным образом на основе понимания назначения каждого компонента и его взаимодействия с другими компонентами. Коэффициент трения между тормозным диском и колодкой — неоднозначная характеристика для моделирования. Коэффициент трения между тормозным диском и колодкой при моделировании обычно считается постоянным и называется средним коэффициентом трения.Влияние переменного коэффициента трения игнорируется, предполагая, что он очень мало влияет на характеристики торможения транспортного средства. Однако коэффициент трения значительно изменяется в зависимости от условий окружающей среды и, таким образом, может значительно повлиять на эффективность торможения, особенно при скольжении колеса.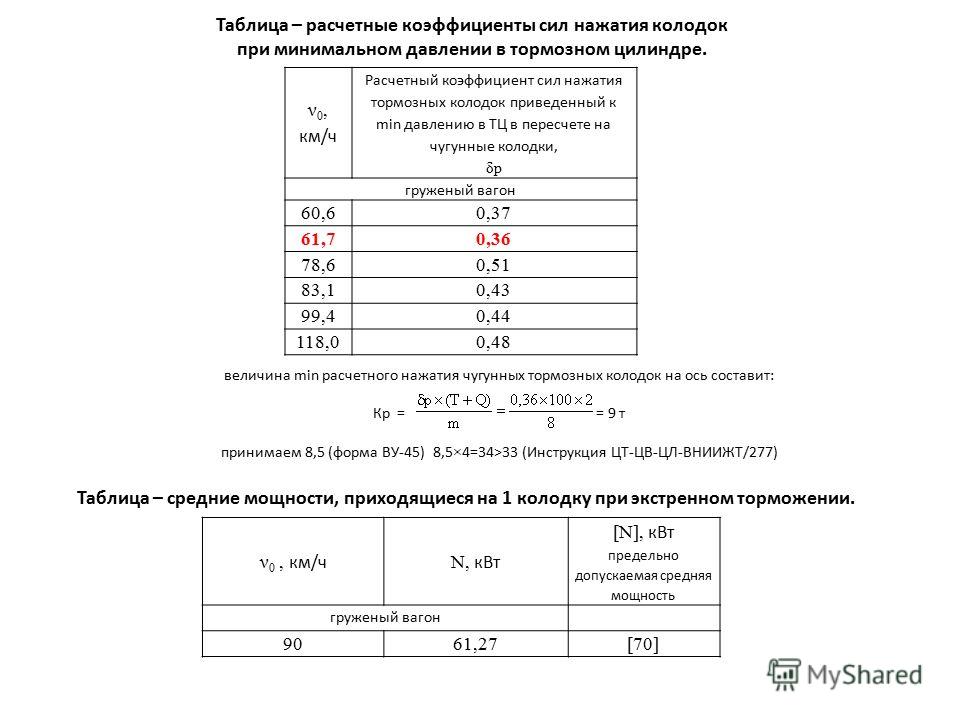
Ранее коэффициент трения между диском и колодкой изучался в контексте того, как измерять или контролировать качество фрикционных материалов [7,8].Локальное трибологическое поведение было изучено с помощью испытаний на трибометре с уменьшенным масштабом [9], связи между механизмами трения и тепловыми явлениями в контакте колодки с диском [10,11], а также влияния давления на характеристики трения [12]. Параллельно с трибологическими исследованиями были проведены системные подходы к полноценным тормозным системам. Система HILS железнодорожного транспортного средства или дорожного вагона была предложена и исследована для торможения и защиты колес от скольжения [13–15], а также для активного управления с целью улучшения характеристик [16,17].Для моделирования динамики привода, в том числе тормозной системы, были разработаны экспериментальные и теоретические подходы к моделированию контакта колеса с рельсом [18–20]. Переменный коэффициент трения тормозной колодки использовался для оценки силы сцепления в справочнике [21], но это исследование не рассматривало влияние температуры на коэффициент трения.
В этой статье изменение коэффициента трения между диском и колодкой учитывается при анализе тормозных характеристик железнодорожного транспортного средства.Предложена математическая формула, описывающая характеристики трения, которая включает тепловой эффект, который может представить общий атрибут переменного трения с использованием двух переменных и пяти параметров, полученных в результате динамометрических испытаний конкретных дисков и колодок. Затем влияние переменного трения на эффективность торможения демонстрируется с помощью тормозной системы HILS, разработанной в нашей лаборатории.
В разделе 2 предлагается формула для переменного коэффициента трения, а в разделе 3 представлена математическая модель транспортного средства, включая контакт колеса с рельсом и тормозные устройства.В разделе 4 мы описываем тормозную систему HILS, разработанную в нашей лаборатории, и демонстрируем обоснованность предложенного переменного коэффициента трения посредством экспериментальных испытаний с использованием системы HILS в разделе 5. Раздел 6 подводит итоги и завершает работу.
Переменный коэффициент трения
Механическая тормозная система железнодорожного транспортного средства в первую очередь преобразует кинетическую энергию транспортного средства в тепловую энергию за счет силы трения. Механическое торможение — это обычный и надежный метод остановки железнодорожного подвижного состава по сравнению с электрическим торможением.Целевым транспортным средством в этом исследовании является железнодорожный транспорт, который находится на вооружении в Корее и имеет дисковый тормоз на колесах. Сила трения в дисковом тормозе на колесе создается за счет относительного движения фрикционных материалов посредством нормальной силы, которая регулируется пневматическими приводами и клапанами. На рис. 1 схематически изображен установленный на колесе диск и тормозной суппорт с колодками [22].
Рис. 1. Схема колесного диска и тормозного суппорта с колодками.
Тормозное усилие создается за счет сжатия колеса с помощью двух колодок.Тормозная сила колодки регулируется пневматическим давлением P c тормозного цилиндра с помощью рычажного механизма с шарниром под углом r c . Тормозное усилие снимается пружиной, установленной внутри тормозного цилиндра.
https://doi.org/10.1371/journal.pone.0135459.g001
Тормозной момент одной колесной пары регулируется давлением воздуха, поступающим от BOU (блока управления тормозом), а тормозной момент определяется как [22] (1) где T b — тормозной момент, действующий на колесную пару, A c — эффективная площадь поршня, P c — давление воздуха, контролируемое BOU, K r — усилие удерживающей пружины поршня в цилиндре, r c — передаточное отношение суппорта, l p — радиус эффективного торможения усилие, а Н d — количество колесных дисков. μ d ( t ) представляет собой переменный коэффициент трения между диском и колодкой.
Характеристики контакта между тормозным диском и колодкой обычно измеряются с помощью динамометрических испытаний с использованием методов, описанных в справочных материалах [7,8], а затем полученный средний коэффициент трения используется для управления тормозом и расчетов характеристик тормозов. Однако измеренный мгновенный коэффициент трения изменяется в пределах указанного диапазона в течение периода торможения.Это изменение коэффициента трения влияет на кратковременные характеристики тормозов, такие как рывки транспортного средства или скольжение-скольжение колеса, даже несмотря на то, что среднего коэффициента трения достаточно для оценки эффективности торможения в нормальных условиях движения.
Трибологические явления для пары диск-колодка включают теплопередачу, что сложно и требует много времени для точного расчета с использованием теоретической математической модели, поэтому нецелесообразно включать модель теплопередачи в моделирование в реальном времени при использовании Система HILS.В этом исследовании мы также сосредоточились на том, как представить мгновенные коэффициенты трения между диском и колодкой в форме уравнения, которое учитывает тепловые эффекты в системе HILS железнодорожного транспортного средства.
Обычно ожидается, что коэффициент трения в первую очередь зависит от температуры контактирующих поверхностей и относительной скорости контактирующих поверхностей. Наблюдается, что характер мгновенного коэффициента трения в начале торможения или на низкой скорости относительно высок по сравнению с установившимся значением.Благодаря этому феноменальному пониманию, основанному на наблюдениях, уравнение (2) вводится в этой статье, чтобы представить характеристики переменного трения между тормозным диском и колодкой. (2) где μ d0 — коэффициент трения в установившемся режиме между диском и колодкой, n v — коэффициент умножения, обусловленный скоростью трения, m v — параметрический коэффициент экспоненциальной функции скорости трения, n T — коэффициент умножения, вызванный повышением температуры, m T — параметрический коэффициент экспоненциальной функции повышение температуры, c — постоянная коррекции.Скорость трения v d — это относительная скорость между диском и колодкой в м / с, а T d — это повышение температуры поверхности диска в градусах Цельсия. В уравнении (2) переменный коэффициент трения μ d является функцией двух переменных v d и T d , и пяти параметров μ d0 , n v , n T , m v и m T
Предлагаемое уравнение (уравнение (2)) для переменного коэффициента трения учитывает влияние повышения температуры фрикционных материалов и скорости трения. Более конкретно, уравнение (2) состоит из умножения трех частей: первая часть — это установившееся значение коэффициента трения, вторая часть — поправка, обусловленная скоростью трения, а третья часть — поправка, обусловленная к повышению температуры фрикционных материалов.
Уравнение (2) выводится на основе результатов динамометрических испытаний для конкретного диска и колодки.На рис. 2 показаны результаты динамометрических испытаний для переменных коэффициентов трения между диском и колодкой из-за повышения температуры и скорости трения. Точки звездочки означают измеренные значения, а сплошные линии означают аппроксимированные значения кривой с использованием уравнения (2) и значений параметров в таблице 1. Рис. 2 (a) показывает, что коэффициент трения между диском и колодкой уменьшается с увеличением температуры поверхности. диска и колодки увеличивается при скорости трения 9,6 м / с. Скорость трения — это тангенциальная скорость точки контакта диска и колодки.Рис. 2 (b) показывает, что коэффициент трения между диском и колодкой уменьшается по мере увеличения скорости трения при температуре поверхности 50 ° C. Сравнивая измеренные и аппроксимированные значения на рис. 2, мы видим, что предложенное уравнение (уравнение (2)) достоверно представляет изменяющиеся характеристики поведения тормозного трения. Скорость трения 20 м / с на фиг. 2 соответствует скорости транспортного средства 113 км / ч для существующей системы HILS, поскольку диаметр колеса составляет 0,86 м, а диаметр колесного диска составляет 0,55 м для существующей системы HILS.
Рис. 2. Измеренные и построенные по кривой коэффициенты трения между тормозным диском и колодкой.
В левой части рисунка показано изменение коэффициента трения из-за изменения температуры при скорости трения 9,6 м / с, а в правой части рисунка показано изменение коэффициента трения из-за изменения скорости трения. при температуре 50 ° С.
https://doi.org/10.1371/journal.pone.0135459.g002
В таблице 1 показаны значения параметров уравнения (2) для переменных коэффициентов трения железнодорожного транспортного средства, рассматриваемого в этой статье; эти параметры были получены с помощью динамометрических испытаний.Константа коррекции c предназначена для согласования значений уравнения с результатами испытаний, и для данного случая она составляет 0,98. Железнодорожное транспортное средство (междугородный транзит) находится в коммерческой эксплуатации в Корее с нормальной скоростью 150 км / ч и имеет колесные дисковые тормоза. Диск был изготовлен из стального сплава, а колодка — из органических материалов, таких как резина и смола, связанные с металлическими волокнами и некоторыми добавками.
Для оценки увеличения температуры диска T d в уравнении (2) было рассмотрено простое уравнение баланса энергии для тормозной системы железнодорожного транспортного средства вместо полных уравнений в частных производных.Вырабатываемая на диске мощность является продуктом тормозной силы и скорости торможения, а генерируемая мощность снижает скорость поезда и затем преобразуется в первую очередь в тепловую энергию. Существует два основных типа рассеивания тепла: теплопроводность к оси, на которой установлены диски, и тепловая конвекция в воздух, скорость которой зависит от скорости транспортного средства. Уравнения баланса энергии, используемые в этой статье, следующие. (3) (4) (5) (6) где E d — энергия, запасенная в тормозном диске, E br — энергия, генерируемая силой трения тормоза, Q cond — энергия, рассеиваемая за счет проводимости к оси, Q conv — энергия, рассеиваемая конвекцией в воздух, σ d — отношение термически преобразованной мощности к механической мощности в диске, ω d — угловая скорость диска, h d — теплопроводность от диска к оси, h v — коэффициент конвекции, A ось — площадь проводимости, A диск — площадь конвективной поверхности диска, c p — спецификация c нагрев диска при постоянном давлении, м диск — масса диска, v w — скорость колеса (окружная), а α и β — два эквивалентные константы.
В уравнении (5) коэффициент конвекции h v аппроксимируется значением, которое пропорционально (скорости колеса) 0,8 в соответствии с результатом из ссылки [23,24], а затем уравнением ( 5) выражается с помощью констант α и β . Два значения: , и , , определяются таким образом, чтобы результаты динамометрических испытаний были примерно такими же, как результаты моделирования для скорости повышения температуры диска и максимальной температуры.
Моделирование
В целях моделирования мы рассматриваем одно транспортное средство целевого поезда с одним кузовом, двумя тележками и четырьмя колесными парами, как показано на рис. 3. Мы предполагаем, что поезд движется по рельсам, расположенным по прямой линии без каких-либо изгибов, потому что поперечный и вращающийся движения между колесами и рельсами существенно не влияют на динамику привода. Следовательно, каждая масса может быть смоделирована как имеющая плоское движение с 3 степенями свободы, то есть продольное, вертикальное и наклонное движения.Более того, мы предполагаем, что колеса всегда контактируют с рельсами, поэтому движения колесной пары могут быть представлены только двумя независимыми переменными: x и θ . Тогда, поскольку транспортное средство состоит из одного кузова, двух тележек и четырех колесных пар, его движение имеет в общей сложности 17 степеней свободы. Между тележками и колесными парами устанавливаются первичные подвески, между кузовом и тележками — вторичные подвески. Индексы c , b и w относятся к кузову, тележке и колесной паре соответственно, а индексы 1, 2, 3 и 4 относятся к порядку расположения колесных пар в транспортном средстве. .
Рис. 3. Схема динамической модели автомобиля.
Мы предполагаем, что поезд движется по рельсам, расположенным по прямой линии без каких-либо изгибов; таким образом, каждая масса моделируется как имеющая плоское движение с 3 степенями свободы, то есть продольное, вертикальное и наклонное движения. Более того, мы предполагаем, что колеса всегда находятся в контакте с рельсами, поэтому движения колесной пары могут быть представлены только двумя независимыми переменными: x и θ . Таким образом, транспортное средство, состоящее из кузова, двух тележек и четырех колесных пар, представлено 17 степенями свободы движения.
https://doi.org/10.1371/journal.pone.0135459.g003
На рис. 4 показана диаграмма свободного тела колесной пары и пятна контакта овальной формы, оба из которых используются в этом моделировании. К внешним силам, действующим на колесную пару, относятся: вертикальная сила Q , продольная сила F xps за счет первичной подвески, сила нормальной реакции R со стороны рельса, тормозной момент T b и сила сцепления F из-за контакта колеса с рельсом.Используя диаграмму свободного тела, два уравнения для продольного и вращательного движений колесной пары можно записать следующим образом. (7) (8) где I w — момент инерции колесной пары, ω — скорость вращения колесной пары, v — линейная скорость колесной пары, r — радиус качения колеса, и m w — масса колесной пары.
Рис. 4. Схема свободного тела колесной пары и форма пятна контакта.
Контакт колеса с рельсом моделируется упругим контактом качения, в котором передняя часть овального пятна контакта является областью сцепления, а задняя часть — областью скольжения. В области сцепления скорость скольжения отсутствует, но в области скольжения существует относительная скорость между колесом и рельсом.
https://doi.org/10.1371/journal.pone.0135459.g004
Сила сцепления F создается сложным трибологическим явлением между колесами и рельсами, и эта сила существенно влияет на характеристики динамики привода. .Предыдущие исследования представили упрощенную модель контакта, чтобы легко вычислить силу сцепления, которая может сократить время расчета и представить поведение колес при скольжении в условиях сильной ползучести на загрязненных контактных поверхностях [16,17]. В данном исследовании применяется упрощенная контактная модель силы адгезии.
Упрощенная модель контакта колеса с рельсом для силы сцепления F выглядит следующим образом [19]. (9) с участием (10) (11) (12) где Q — нагрузка на колесо, μ — коэффициент трения между колесами и рельсами, k A — коэффициент уменьшения в зоне сцепления, k s — уменьшение коэффициент в области скольжения, μ 0 — максимальный коэффициент трения при нулевой скорости скольжения, A — отношение коэффициента трения при бесконечной скорости скольжения к максимальному коэффициенту трения при нулевой скорости скольжения μ ∞ / μ 0 , B — коэффициент экспоненциального уменьшения трения, C — коэффициент пропорциональности, характеризующий контактную жесткость на сдвиг, а a и b — коэффициент полуоси контактного эллипса, а с — полная утечка.
В этой модели контакта мы предполагаем, что площадь контакта состоит из площади сцепления и площади скольжения, и что поверхностное напряжение сдвига на площади скольжения пропорционально нормальному поверхностному напряжению, полученному с использованием теории упругого контакта Герца [25]. , и что поверхностное напряжение сдвига в области сцепления увеличивается линейно с наклоном C , который выводится с использованием линейной теории Калкера [26].
В контактной модели вводится один набор параметров A , B , k A , ks и μ 0 для определения состояния контакта колеса с рельсом и разнообразная комбинация параметров может представлять различные ситуации контакта колеса с рельсом, такие как сухие, влажные или загрязненные условия.
Значения параметров для модели контакта колеса с рельсом целевого транспортного средства показаны в таблице 2. Значения параметров немного изменены по сравнению с рекомендованными значениями в ссылке [16] для влажных условий, чтобы подчеркнуть влияние переменного коэффициента трения между дисками. и площадку.
Тормозная система HILS
Система аппаратного моделирования (HILS) для тормозного блока железнодорожного транспортного средства, рассматриваемая в данном исследовании, состоит из динамической модели железнодорожного транспортного средства для моделирования в реальном времени и аппаратные компоненты тормозной системы, как показано на рис.5.Динамическая модель моделирования в реальном времени состоит из динамики транспортного средства, модели контакта колеса с рельсом и модели переменного трения диска и колодки, как описано в предыдущем разделе. Аппаратные компоненты тормозной системы включают тормозной суппорт, блок управления тормозом (BOU), четыре клапана WSP (защита скольжения колес), четыре резервуара для фиктивных объемов, датчики тормозного усилия, датчики давления воздуха, кондиционеры сигналов, контроллер тормоза и пневматические трубки.Контроллер тормоза состоит из ECU (электронного блока управления) и ASCU (блока управления противоскользящим покрытием), чьи функции включают управление тормозным усилием с использованием управления тормозом и логики предотвращения пробуксовки колес. Формирователи сигналов усиливают и фильтруют выходные сигналы ЭБУ и ASCU и отправляют сигналы в BOU. BOU приводит в действие пневматические клапаны, а затем приводит в действие тормозной суппорт. Трубопроводные работы выполнялись как можно ближе к пневматической системе действующей технологической линии (целевой линии).Механическое тормозное устройство в разработанной системе HILS имеет ту же конструкцию, что и схема на рис. 1, но колесо неподвижно. Движение транспортного средства реализуется частью моделирования в реальном времени в HILS. Система HILS способна обеспечить фактическое нормальное тормозное усилие на тормозном диске. Затем сила трения на тормозном диске рассчитывается как произведение измеренной нормальной силы на коэффициент трения тормозной колодки.
Рис 5. Схематическая конфигурация тормозной системы HILS.
Динамика автомобиля моделировалась в реальном времени с помощью высокоскоростного блока dSPACE, а четыре скорости колес моделировались блоком dSPACE, соединенным с фактическим тормозным оборудованием через формирователь сигналов и BOU. Тормозная сила, измеренная тензодатчиками, передавалась в виде обратной связи на блок dSPACE для вычисления скорости вращения колес в следующий момент выборки.
https://doi.org/10.1371/journal.pone.0135459.g005
Совместное моделирование с использованием динамических моделей и аппаратных компонентов требует надлежащего обмена данными между аппаратными компонентами и программными моделями транспортных средств.Программные модели транспортных средств предоставляют смоделированные скорости транспортного средства аппаратным компонентам, а затем BOU генерирует тормозное усилие с помощью тормозного суппорта в соответствии с командой торможения и смоделированными скоростями транспортного средства. Тормозное усилие измерялось датчиком тормозного усилия (тензодатчиком), и измеренное тормозное усилие возвращалось в программное обеспечение модели транспортного средства. Следовательно, с точки зрения аппаратного тормозного блока, тормозной блок тормозной системы HILS принимает электрические сигналы, аналогичные сигналам реального поезда.Тормозной блок фактически не знает, исходят ли электрические сигналы от реального поезда или от системы HILS. Другими словами, мы можем протестировать тормозной блок, используя систему HILS вместо реального поезда.
Потоки сигналов в системе HILS показаны на рис. 6. Главные ПК генерируют команду на торможение и контролируют смоделированное состояние движения поезда с помощью человеко-машинного интерфейса (MMI), запрограммированного с помощью программного обеспечения ControlDesk. Динамика железнодорожного транспорта и механика контакта колеса с рельсами / контактной площадки-диска выполняются в реальном времени с использованием высокопроизводительной платы DSP, а скорость движения транспортного средства и скольжение колеса генерируются как результаты моделирования в реальном времени.Затем сгенерированные четыре скорости колесной пары отправляются в блок управления, то есть в ЭБУ и ASCU. Блок управления и формирователи сигналов выдают управляющие сигналы, которые преобразуются в силовые сигналы для приведения в действие пневматических клапанов. Тормозное усилие, создаваемое BOU и тормозным суппортом, измерялось датчиками нагрузки и передавалось в динамику транспортного средства в качестве входных данных.
Рис. 6. Поток сигналов и интерфейс тормозной системы HILS.
Есть два главных компьютера: один компьютер для блока dSPACE, в котором динамика автомобиля моделируется в реальном времени, а другой компьютер для блока управления, в котором вычисляется тормозное усилие, а скольжение колеса обнаруживается и защищается. .Тормозное усилие создается пневматическим тормозным устройством в соответствии с выходными сигналами блока управления.
https://doi.org/10.1371/journal.pone.0135459.g006
ЭБУ управляет электропневматическим (EP) клапаном, который генерирует необходимое давление с помощью PI (пропорционально-интегрального) управления и гистерезиса. алгоритм компенсации для достижения требуемых тормозных эффектов, соответствующих командам из графического интерфейса. Логика управления ASCU используется для обнаружения заноса и предотвращения блокировки колес с использованием оптимальной силы сцепления.
Оборудование пневматического тормозного блока для HILS подготовлено с использованием коммерческого продукта целевого автомобиля, за исключением электронного контроллера. Электронный контроллер системы HILS достигается с помощью программного обеспечения MATLAB / Simulink, целевой платы xPC и настольного ПК для реализации логики управления, описанной в предыдущем разделе. Модель транспортного средства, а также модель контакта колеса с рельсом моделируются в реальном времени с использованием времени выборки 0,1 мс с помощью высокопроизводительного блока dSPACE.Кроме того, формирователи сигналов подготовлены для сопряжения управляющих сигналов с сигналами исполнительного механизма. На рис. 7 показано изображение тормозной системы HILS, разработанной в нашей лаборатории.
Рис. 7. Изображение тормозной системы HILS, разработанной в нашей лаборатории.
Красное устройство в верхней части рисунка — это переносной воздушный компрессор, используемый для подачи энергии на механический тормозной блок. Колесо и тормозной суппорт устанавливаются на полу (в центре рисунка), BOU и блок dSPACE размещаются на столе (правая часть рисунка), а четыре клапана WSP и четыре белых резервуара соответствуют трубопроводам. объемы цилиндров размещены на вертикальной панели (нижняя часть рисунка).
https://doi.org/10.1371/journal.pone.0135459.g007
Результаты и обсуждение
Для запуска тормозной системы HILS сценарий торможения был подготовлен следующим образом. Было использовано одно междугороднее транспортное средство, которое движется со скоростью 150 км / ч по прямому рельсу без неровностей, и рельс эксплуатировался во влажных условиях. Были использованы параметры модели контакта колеса с рельсом из таблицы 2. Команда EB (аварийное торможение) была отдана водителем на рабочей скорости 150 км / ч.Величина замедления при экстренном торможении была установлена на 5 км / ч / с. Все остальные параметры имеют значения целевого железнодорожного подвижного состава, как показано в Таблице 3.
На рис. 8 показаны экспериментальные результаты для четырех скоростей вращения колес и четырех осевых нагрузок во время экстренного торможения системы HILS. Эти результаты HILS показывают, что для полной остановки поезда требуется примерно 30 секунд, когда команда EB подается при скорости поезда 150 км / ч. Силы замедления и торможения на рис. 8, которые были созданы системой HILS, являются приемлемыми с учетом заданных характеристик торможения целевого поезда.Особое поведение при торможении наблюдается примерно через 4 секунды, когда происходит проскальзывание колеса во второй и четвертой колесных парах и начинают работать клапаны WSP. Причина, по которой проскальзывание колес наблюдались только во второй и четвертой колесных парах, заключается в том, что требуемый предел коэффициента сцепления колеса был увеличен во второй и четвертой колесных парах, поскольку осевая нагрузка уменьшилась из-за передачи веса во время торможения. В этом тесте HILS мы использовали переменный коэффициент трения μ d между диском и колодкой вместо постоянного коэффициента трения μ d0 .
Рис. 8. Результаты экспериментов системы HILS для различных скоростей вращения колес и осевых нагрузок.
(A) Окружные скорости четырех колесных пар при экстренном торможении. (B) Осевые нагрузки четырех колесных пар при экстренном торможении.
https://doi.org/10.1371/journal.pone.0135459.g008
Переменный коэффициент трения между диском и колодкой, используемый для экстренного торможения системы HILS, показан на рис. 9 сплошной линией. что коэффициент трения высокий на начальной стадии торможения из-за низкой температуры тормозных материалов, и что он высокий на конечной стадии торможения из-за низкой скорости трения по сравнению с коэффициентом трения промежуточной стадии торможения. .Как предсказано уравнением (2), переменный коэффициент трения μ d был больше, чем постоянный коэффициент трения μ d0 , который в данном случае составлял 0,38. Несмотря на то, что экспериментальные результаты динамометра на рис. 2 нельзя напрямую сравнивать с предсказанными значениями, показанными сплошной линией на рис. 9 из-за разницы по оси абсцисс, уменьшение коэффициента трения на начальной стадии торможения и увеличение коэффициента трения на заключительном этапе торможения на фиг.9 частично демонстрируют справедливость предложенного уравнения (2).
Рис. 9. Коэффициенты трения между диском и колодкой при экстренном торможении системы HILS.
Переменный коэффициент трения на начальной и конечной стадиях торможения больше, чем коэффициент трения на промежуточной стадии из-за низкой температуры тормозных материалов и из-за низкой скорости трения.
https://doi.org/10.1371/journal.pone.0135459.g009
Интересно, если использовать постоянный коэффициент трения μ d0 вместо переменного коэффициента трения μ d для такой же сценарий торможения, как показано на рис. 8, во время испытания HILS не происходит скольжения колеса даже во второй и четвертой колесных парах.Сплошная линия на рис. 10 показывает тангенциальную тормозную силу на диске четвертой колесной пары, создаваемую переменным коэффициентом трения, тогда как пунктирная линия на рис. 10 показывает тангенциальную тормозную силу, создаваемую постоянным коэффициентом трения μ d0 . Чем больше тормозное усилие, создаваемое переменным коэффициентом трения, тем больший коэффициент сцепления требуется в контакте колеса с рельсом для предотвращения скольжения колес. Достигнутый максимальный коэффициент сцепления между колесом и рельсом был меньше требуемого предельного значения для переменной μ d и больше требуемого предела для постоянного μ d0 , как показано на рис.11.Следовательно, скольжение колеса происходит только в случае с переменным коэффициентом трения, как показано сплошной линией на рис. 10. Когда скольжение колеса происходит в конкретной колесной паре, тормозное усилие этой колесной пары уменьшается, чтобы освободить скольжение колеса, открыв WSP. клапана этой колесной пары, как показано сплошной линией на рис. 10. Пунктирная линия на рис. 10 показывает, что постоянное тормозное усилие без выбоин не приводит к скольжению колеса во время торможения. Обратите внимание, что приложенная нормальная сила к тормозному диску четвертой колесной пары была непосредственно измерена с использованием трех датчиков нагрузки, установленных между тормозным суппортом и колесом, в то время как приложенные нормальные силы трех других колесных пар были рассчитаны на основе измеренных давлений в резервуарах, соответствующих тормозу. цилиндры в существующей системе HILS, как показано на рис.7.
Рис. 10. Результаты HILS для касательных тормозных сил на диске во время экстренного торможения.
Углубление синей сплошной линии примерно через 4 с связано с ослаблением тормозного усилия для восстановления от салазок колеса путем открытия клапана WSP скользящей колесной пары. Зеленая пунктирная линия соответствует тормозной силе с использованием постоянного коэффициента трения, при котором проскальзывание колеса не моделируется во время торможения, даже если проскальзывание колеса действительно происходит.
https: // doi.org / 10.1371 / journal.pone.0135459.g010
Рис. 11. Зависимость коэффициента адгезии от пути утечки.
Большее тормозное усилие из-за переменного коэффициента трения требует большего коэффициента сцепления в контакте колеса с рельсом для отсутствия скольжения колеса, но достигнутый коэффициент сцепления меньше требуемого предельного значения, как показано синей штрихпунктирной линией, и, следовательно, , происходит скольжение колеса.
https://doi.org/10.1371/journal.pone.0135459.g011
Принимая во внимание явление скольжения колеса колесной пары, наиболее важным является то, превышает ли прилагаемое тормозное усилие доступное максимальное усилие сцепления.На рис. 11 показан коэффициент сцепления как функция пути утечки в контакте колеса с рельсом примерно через три секунды после команды EB (то есть примерно при скорости 140 км / ч). Коэффициент сцепления был рассчитан по формуле (9) с использованием (13)
Для вычисления коэффициента адгезии на рис. 11 мы использовали уравнения (9) — (12) и значения параметров в таблице 2.
Кроме того, на рис. 11 показаны два предела противоскольжения, необходимые для случаев с переменным коэффициентом трения и постоянным коэффициентом трения.На рисунке 11 предел противоскольжения для переменного коэффициента трения (штрихпунктирная линия) превышает максимальное значение коэффициента сцепления (сплошная линия), что означает, что тормозная сила, создаваемая на диске, превышает максимальную силу сцепления, устойчивую на рельс, и эта сила вызывает скольжение колеса. И наоборот, предел противоскольжения для постоянного коэффициента трения (пунктирная линия) ниже максимального значения коэффициента сцепления (сплошная линия), что означает, что тормозная сила, создаваемая на диске, меньше максимальной силы сцепления, допустимой на рельсе. , а затем нет скольжения колеса с примерно постоянным замедлением.
Если достигнутое тормозное усилие с переменным коэффициентом трения превышает максимальную силу сцепления, это вызывает скольжение колеса, и утечка колеса увеличивается. Увеличенная утечка колеса снижает силу сцепления. Затем логика защиты колеса от скольжения (WSP) ASCU обнаруживает скольжение колеса и активирует клапан WSP для восстановления скорости вращения колеса. На рис. 10 мы видим, что клапан WSP запускается примерно через 4 секунды. Хотя два случая с переменным коэффициентом трения и постоянным коэффициентом трения демонстрируют аналогичное поведение на начальной стадии торможения, случай с переменным коэффициентом трения вызывает скольжение колеса, но случай с постоянным коэффициентом трения не вызывает скольжения колеса для настоящий сценарий торможения системы HILS.Следовательно, для более реалистичного моделирования тормозов, отражающего фактические условия торможения поезда, мы должны учитывать различные коэффициенты трения между диском и колодкой. Если мы рассмотрим только постоянный коэффициент трения вместо переменного коэффициента трения, мы можем пропустить некоторые критические явления, такие как случайное скольжение колеса, как показано на рис. 10.
На рис. 12 показаны силы сцепления четвертой колесной пары в зависимости от пути утечки и времени для случаев с переменным и постоянным коэффициентами трения на трехмерном графике.Хотя вышеупомянутая феноменальная разница для случаев с переменным и постоянным коэффициентами трения не часто возникает во время операций торможения, переменный коэффициент трения между диском и колодкой может лучше походить на реальный процесс торможения поезда, особенно в начале и в конце. заключительные этапы торможения.
Рис. 12. Экспериментальные результаты системы HILS для сил адгезии.
Синяя сплошная линия и зеленая пунктирная линия соответствуют силе сцепления в зависимости от пути утечки и времени для случая с использованием переменного коэффициента трения и постоянного коэффициента трения соответственно.
https://doi.org/10.1371/journal.pone.0135459.g012
Выводы
Для механической тормозной системы железнодорожного транспортного средства влияние переменного коэффициента трения между диском и колодкой было проанализировано и продемонстрировано в этой статье с использованием тормозной системы HILS, разработанной в нашей лаборатории. Влияние переменного коэффициента трения между диском и колодкой иногда значительно проявлялось на начальной и конечной стадиях торможения.
Формула для переменного коэффициента трения между диском и колодкой была введена на основе данных измерений динамометрических испытаний, в которых переменный коэффициент трения с использованием пяти параметров является функцией скорости трения и повышения температуры. Затем формула для переменного коэффициента трения была применена к экстренному торможению в тормозной системе HILS, в которой мы установили фактическое оборудование тормозного блока междугородного транзитного поезда со скоростью 150 км / ч. Проверка формулы была проведена путем одного сравнения с результатами динамометрического испытания.Несмотря на то, что упрощенной формулы с 5 параметрами было недостаточно для получения детальных явлений трибологии между тормозным диском и колодками, она имеет компромиссную сложность для моделирования и оценки поведения скольжения колеса в тормозном устройстве в системе HILS.
Достоверность переменного коэффициента трения колодки диска была продемонстрирована тестами HILS для сценария экстренного торможения с начальной скоростью 150 км / ч на мокром рельсе. Результаты HILS показали, что формула для переменного коэффициента трения четко представляет физические явления, такие как переменный коэффициент трения на начальной и конечной стадиях торможения больше, чем коэффициент трения на промежуточной стадии из-за низкой температуры тормозных материалов и из-за низкой скорости трения.Испытание HILS продемонстрировало, что тормозное усилие при использовании переменного коэффициента трения создает скольжение колеса, а тормозное усилие при использовании постоянного коэффициента трения — нет. Безусловно, переменный коэффициент трения между диском и колодкой больше похож на реальный процесс торможения поезда, особенно на начальной и конечной стадиях торможения.
Скольжение колеса является одним из критических факторов, влияющих на эффективность торможения, и скольжение колеса может быть достигнуто более точно в тормозной системе HILS при использовании переменного коэффициента трения, чем при использовании обычного постоянного коэффициента трения.
Благодарности
Мы глубоко благодарим г-на Донг-Кюн Ли из Yujin Machinery Ltd. за его постоянную помощь в установке и эксплуатации механического тормозного блока системы HILS, а также благодарим г-на Донг-чана Ли из Университета Конкук за его помощь во время испытаний HILS. .
Вклад авторов
Задумал и спроектировал эксперименты: CGK NJL. Проведены эксперименты: NJL. Проанализированы данные: CGK NJL. Предоставленные реагенты / материалы / инструменты анализа: CGK NJL.Написал статью: CGK NJL.
Список литературы
- 1. Луф Р., Рот С., Бартелеми М. Масштабирование транспортных сетей. PLOS ONE. 2014; 9: e102007. pmid: 25029528
- 2. Гершенсон К., Пинеда Л.А. Почему общественный транспорт не прибывает вовремя? Распространенность одинаковой нестабильности продвижения вперед. PLOS ONE. 2009; 4: e7292. pmid: 19862321
- 3. Кан CG. Анализ тормозной системы корейского высокоскоростного поезда с использованием моделирования в реальном времени.J Mech Sci Technol. 2007; 21: 1048–1057.
- 4. Кан CG, Ким HY, Ким MS, Goo BC. Моделирование железнодорожной тормозной системы в реальном времени с помощью платы dSPACE. Материалы международной совместной конференции ICROS-SICE. В: 4073–4078; 2009.
- 5. Ким HY, Кан CG, Кан BB. Система ASCU HILS для подвижного состава с сигналами обратной связи сбросных клапанов. Материалы Международной конференции по управлению, автоматизации и системам; 27–30 октября 2010 г .; Кенги-до, Южная Корея.2010. с. 1318–1321.
- 6. Пуги Л., Мальвецци М., Тараскони А., Палаццоло А., Коччи Г., Виолани М. Моделирование HIL систем ПОБВ на испытательном стенде МИ-6. Автомобиль Syst Dyn. 2006; 44: 843–852.
- 7. МСЖД 541–3. Тормоза — Дисковые тормоза и их применение — Общие условия допуска тормозных колодок. 2010.
- 8. Ким MS. Разработка технологии оценки эффективности торможения для высокоскоростного динамометрического стенда. Международный журнал системных приложений, инженерии и разработки.2012; 6: 122–129.
- 9. Desplanques Y, Roussette O, Degallaix G, Copin R, Berthier Y. Анализ трибологического поведения контакта колодки с диском при железнодорожном торможении: Часть 1. Разработка лабораторных испытаний, компромиссы между фактическими и смоделированными трибологическими тройками. Носить. 2007. 262: 582–591.
- 10. Цойнер Т., Стоянов П., Сам П., Рупперт Х., Энгельс А. Развитие тенденций в технологии дисковых тормозов для железнодорожного транспорта. Mater Sci Technol. 1998; 14: 9–10.
- 11.Кристоль-Бюльте А.Л., Деспланк Ю., Дегалле Ж. Связь между физическими механизмами трения и переходными тепловыми явлениями, связанными с контактом колодки и диска во время торможения железной дороги. Носить. 2007; 263: 1230–1242.
- 12. Ким SH, Ли HS. Влияние давления на трибологические характеристики между спеченными фрикционными материалами и стальным диском. Int J Precis Eng Manuf. 2011; 12: 643–650.
- 13. Пак С., Ким Дж., Чой Дж., Ямадзаки Х. Моделирование и контроль силы сцепления в железнодорожном подвижном составе.IEEE Control Syst Mag. 2008. 28: 44–58.
- 14. Юн Д., Ким Х., Бу К. Оценка эффективности торможения АБС с контроллером скользящего режима на разбитой дороге с моделью водителя. Int J Precis Eng Manuf. 2011; 12: 31–38.
- 15. Мели Э., Пуги Л., Ридольфи А. Инновационная модель ухудшенной адгезии для многотельных применений на железной дороге. Multibody Syst Dyn. 2014. 32: 133–157.
- 16. Ли Н.Дж., Кан К.Г., Ли В.С., Донген Т. Испытания на роликах полуактивной системы подвески железнодорожного подвижного состава.Материалы Международной конференции по управлению, автоматизации и системам; 17–21 октября 2012 г .; Остров Чеджу. 2012. с. 117–122.
- 17. Ha MT, Kang CG, Kim HY, Lee JH, Lee NJ, Lee JH и др. Управление плавным опрокидыванием поезда с помощью двух гидроприводов. Материалы Международного симпозиума IEEE / SICE по системной интеграции; 20–22 декабря 2011 г .; Киото, Япония. п. 1335–1339.
- 18. Кан CG, Ким HY, Ким MS, Goo BC. Моделирование сил ползучести, действующих на колесо подвижного состава.Материалы Международной конференции по управлению, автоматизации и системам; 14–15 октября 2008 г .; Сеул, Южная Корея. 2008. с. 7–12.
- 19. Полач О. Силы ползучести при моделировании тяговых машин, движущихся на пределе сцепления. Носить. 2005; 258: 992–1000.
- 20. Полач О. Влияние тягового усилия локомотива на силы между колесом и рельсом. Автомобиль Syst Dyn. 2001; 35: 7–22.
- 21. Cocci G, Presciani P, De Rosa A, Toni P, Allotta B, Pugi A.Оценка ухудшения адгезии в испытаниях на соответствие WSP. Материалы Всемирного конгресса по железнодорожным исследованиям; 2001 25–29 ноября; Кёльн, Германия. 2001. (плакат)
- 22. Yujin Machinery Ltd. [Техническое описание тормозной системы для междугородних транспортных средств]; 2010. Корейский.
- 23. Ли К. Численное прогнозирование повышения температуры тормозной жидкости при торможении и нагревании. Сделки SAE. 1999; 108: 897–905.
- 24. Ци HS, День AJ. Исследование температуры поверхности раздела диск / колодка при фрикционном торможении.Носить. 2007. 262: 505–513.
- 25. Джонсон К.Л., Кир Л.М.. Контактная механика. Издательство Кембриджского университета; 1986.
- 26. Калкер Дж. Дж. Теория контакта качения колеса с рельсом. Носить. 1991; 144: 243–262.
Трение и тормозной путь: за этим показанием MARWIS
стоит многое. Источник фото: Thaut Images, Fotolia.com
На основе измерения связанных с погодой параметров на дороге или аэродроме (таких как процент льда, высота водяной пленки и температура поверхности) MARWIS вычисляет, какое среднее трение возникает.
Термин «трение» можно перевести как коэффициент сцепления или трения между шиной и поверхностью дороги. Коэффициент трения определяется как соотношение между тормозной силой и нормальной силой, воздействующей на площадь поверхности шины в физическом выражении (через вес транспортного средства, нагружающего шину). Это определение эквивалентно другому определению, которое может быть лучше применимо на практике: «трение» — это отношение среднего замедления торможения (при полном торможении!) К ускорению свободного падения (гравитационное ускорение составляет примерно 10 м / с2) .Тормозное замедление — это отрицательное ускорение (следовательно, изменение скорости в единицу времени), которое также выражается в «м / с2». Отношение — безразмерное число.
Если вы знаете эти соединения, изменение значения трения может помочь оценить влияние на трафик, поскольку оно позволяет указать увеличение тормозного пути для данной начальной скорости. Таким образом, трение — это показатель того, насколько скользкая дорога.
Приложение MARWIS Силы на шине (источник фото: zentilia) MARWIS в аэропортуЦифры, основанные на опыте, показали, что средняя поверхность дороги, которая подвергалась движению в течение длительного времени, имеет значение трения не менее 0.82 в сухих условиях. В сырую погоду значение можно уменьшить до 0,55. Заснеженная дорога может иметь значения от 0,5 до 0,2. Значения гололеда могут составлять от 0,3 до 0,1 в зависимости от типа гололеда.
Снижение трения с 0,8 до 0,4 или с 0,6 до 0,3 означает удвоение тормозного пути.