Конструкция вариатора
Вариатор предназначен для передачи крутящего момента от двигателя к колесам. Вариаторы еще давно начали применяться в мотоциклах и мопедах. Вариатор изобрели уже давно, но его популярность нашла себя только в наше время.
При трогании автомобиля с места на вариаторе получается ощущение разгона мощного электродвигателя. Такой автомобиль может оставить позади более мощные автомобили, так как ему не требуется время для переключения скоростей. Автомобиль такого типа во многом будет помогать своему владельцу, обеспечивая плавное трогание с места, а также предохранит от скатывания автомобиля назад с подъема, в пробках автомобиль не заглохнет.
Существует всего две педали, в точности как при автоматической коробке передач. Это дает возможность облегчить управление вашим автомобилем и повысит комфорт передвижения.
Конечно, ровное звучание мотора на всех режимах движения автомобиля чем-то настораживает, но это говорит о том, что автомобиль укомплектован современной электроникой, которая оптимизирует работу, выбирая оптимальное соотношение всех рабочих параметров.
— внушаемый набор скорости;
— хорошая экономия топлива;
— регулировка и оптимизация нагружения двигателя и приводов;
— меньший шум;
— меньше выброса вредных веществ отработавших газов.
К недостаткам конструкции вариатора можно отнести:
— Вариатор не устанавливается на автомобили с мощными двигателями;
— Для эксплуатации вариатора применяется специальная жидкость, которая является незаменяемой и требует четкого контроля. Еще одним недостатком является дороговизна жидкости.
— Дорогое обслуживание и ремонт;
— Мало СТО специализирующихся на вариаторах;
— Есть ограничения по буксировке автомобиля с вариатором.
— Зависимость рабочего режима вариатора от датчиков: скорости , АБС, давления и др.
Правильная эксплуатация автомобиля с вариатором:
— в зимний период давать прогреться всем элементам двигателя и трансмиссии;
— следить за уровнем специальной жидкости;
— Не допускать повышенных и резких нагрузок;
— Своевременно проводить диагностирование датчиков и приборов. {jcomments on}
{jcomments on}
Коробка передач «вариатор»: конструкция, принцип работы и перспективы
Может случиться, однажды автомобилисты забудут о том, что такое «автоматы». Не исключено, что их вытеснят вариаторы. Уже сейчас модификации с этим интересным и – главное – эффективным типом трансмиссии есть в модельной гамме многих автопроизводителей. Разберемся в вопросе «Что такое вариатор?».
Первые серийные автомобили с вариаторами появились полвека назад. Голландская фирма DAF еще в начале 50-х годов выпускала легковушки с бесступенчатой трансмиссией. Позже пробовали сделать нечто подобное и другие европейские и японские автоконцерны. Однако тогда механизм не получил широкого распространения. Если машины с вариатором и появлялись, то это были исключительно малолитражки. Первые вариаторы не отличались надежностью и просто не выдержали бы нагрузок, создаваемых мощными двигателями. Но, как говорится, все течет, все изменяется. К концу тысячелетия «детские болезни» удалось вылечить, и теперь вариаторами оснащается все больше автомобилей, в том числе крупных, с сильными моторами.
Чем отличается вариатор от «автомата»?
В традиционных КПП передаточное отношение меняется ступенчато. Вы сначала включаете первую передачу, затем вторую, третью… Автоматическая коробка «перебирает» передачи точно так же, хотя и без участия водителя. У вариатора принцип действия совершенно иной: здесь никакой первой или пятой скоростей нет вообще — передаточное отношение изменяется непрерывно и без «скачков». Это, пожалуй, можно сравнить с подъемом по ступенькам лестницы (привычные КПП) и на эскалаторе (вариатор). Разумеется, эскалатор несет вас гораздо более плавно. При этом вариатор проще, чем «автомат», дешевле и существенно легче.
Между прочим, конструкция современных вариаторов позволяет использовать несколько (обычно от пяти до восьми) фиксированных передач в трансмиссии. Это для тех, кто любит иногда поездить как на «механике». Есть такое желание — электроника по вашей воле будет останавливать скольжение ремня или цепи механизма на отметке, соответствующей той или иной передаче. Надоело — трансмиссия вновь превращается в чисто вариаторную.
Надоело — трансмиссия вновь превращается в чисто вариаторную.
Особенности конструкции вариатора
Вариаторы бывают нескольких типов: торовые, лобовые и клиноременные. У нас речь пойдет о клиноременных, поскольку именно они применяются на автомобилях (а также на скутерах, снегоходах и мотовездеходах).
Как устроен вариатор? Схема его действия напоминает… велосипед. Там педали вертят большую звездочку, она через цепь передает вращение на маленькую — и та заставляет крутиться колесо. Теперь вообразите, что звездочки одинакового размера, но могут по вашему желанию изменять диаметр. Если вы хотите ехать быстрее, передняя звездочка становится больше, а задняя меньше, если медленнее — передняя меньше, а задняя больше.
Велосипед, увы, на это не способен, а вот вариатор именно так и работает. Потому что вместо звездочек у него две пары дисков (нечто вроде тарелок, совмещенных донышками), а между ними натянут специальный ремень, который в поперечном сечении имеет форму клина (потому вариатор и называется клиноременным). Одну пару «тарелок» крутит мотор, а другая соответственно приводит в движение колеса автомобиля. Весь фокус в том, что каждая пара дисков может придвигаться друг к другу или расходиться. Когда вы нажимаете на акселератор, ведущие «тарелки» (которые вращает двигатель) сходятся, выдавливая ремень к внешним краям дисков. А вторая пара (та, что «ведает» колесами) раздвигается, пропуская свою часть ремня ближе к центру. Понятно, что колеса начинают вертеться быстрее и машина ускоряется. Сбрасываете газ — все происходит с точностью до наоборот. Ведущая пара дисков расходится, а ведомая сближается, заставляя колеса вращаться медленнее. Самое главное, что ремень между дисками перемещается без малейших пауз, рывков и дерганий. Отсюда и непревзойденная плавность вариатора, недоступная обычным КПП, которые переключают ограниченное число передач со «ступеньки» на «ступеньку».
Одну пару «тарелок» крутит мотор, а другая соответственно приводит в движение колеса автомобиля. Весь фокус в том, что каждая пара дисков может придвигаться друг к другу или расходиться. Когда вы нажимаете на акселератор, ведущие «тарелки» (которые вращает двигатель) сходятся, выдавливая ремень к внешним краям дисков. А вторая пара (та, что «ведает» колесами) раздвигается, пропуская свою часть ремня ближе к центру. Понятно, что колеса начинают вертеться быстрее и машина ускоряется. Сбрасываете газ — все происходит с точностью до наоборот. Ведущая пара дисков расходится, а ведомая сближается, заставляя колеса вращаться медленнее. Самое главное, что ремень между дисками перемещается без малейших пауз, рывков и дерганий. Отсюда и непревзойденная плавность вариатора, недоступная обычным КПП, которые переключают ограниченное число передач со «ступеньки» на «ступеньку».
Перспективы бесступенчатой трансмиссии
Чтобы сделать вариаторы еще надежнее, в последнее время автопроизводители применяют вместо ремня более долговечные металлические цепи, а две пары дисков заменяют одной парой валов. Эти валы в форме усеченного конуса располагаются бок о бок, так сказать, «налетом»: вершина одного соседствует с основанием другого. Жмем на газ — цепь, опоясывающая оба конуса, «поехала» в ту сторону, где ведущий вал расширяется, а ведомый (вращающий колеса) становится уже. Автомобиль едет быстрее. Хотим замедлить ход — цепь скользит в обратном направлении. Помимо всего прочего, металлическая цепь и прочные конусные валы в состоянии «переварить» солидный крутящий момент, что позволяет использовать вариатор даже в паре с мощными моторами, в том числе шестицилиндровыми. Пример тому — автомобили марок Nissan или Subaru. По всей вероятности, в дальнейшем появятся еще более совершенные варианты. Несомненно одно: у вариаторов в мире автомобилей большое будущее.
Эти валы в форме усеченного конуса располагаются бок о бок, так сказать, «налетом»: вершина одного соседствует с основанием другого. Жмем на газ — цепь, опоясывающая оба конуса, «поехала» в ту сторону, где ведущий вал расширяется, а ведомый (вращающий колеса) становится уже. Автомобиль едет быстрее. Хотим замедлить ход — цепь скользит в обратном направлении. Помимо всего прочего, металлическая цепь и прочные конусные валы в состоянии «переварить» солидный крутящий момент, что позволяет использовать вариатор даже в паре с мощными моторами, в том числе шестицилиндровыми. Пример тому — автомобили марок Nissan или Subaru. По всей вероятности, в дальнейшем появятся еще более совершенные варианты. Несомненно одно: у вариаторов в мире автомобилей большое будущее.
Конструкция вариатора hr v — Принцип работы и конструкция вариатора honda hr-v. Блог, факты, видео
Honda HR — V 人生動 » Бортжурнал » CVT, Вариатор, Варик несколько слов о коробке Honda. Всем привет! Вариатор, потрясающие эмоции от работы и ужасающе слово обычного водителя.
В итоге гарантированный ресурс работы вариатора составил 30 тысяч километров. Разучить это слово заставила Honda, представив в конце х свой кроссовер HR — V, в конструкции которого вообще не предполагалось иной.
К сожалению, в конструкции Honda, вариатор самый капризный узел мельничном деле, но принцип работы передаточного узла был абсолютно таким же. На ранних вариаторах Honda (автомобили Civic в кузове EK3, HR — V, Integra SJ), на щупах КПП.
Конечно, бесступенчатая трансмиссия еще не так популярна в среде японских конструкторов, как, скажем, тот же автомат, но начало вытеснения последнего клиноременным механизмом положено. Над его созданием размышлял еще Леонардо да Винчи, и в средние века что-то подобное применяли для привода мельничных жерновов. Охрана «Honda CR-V» Модераторы: Вариатор не спортивен Очередной бред, по тестам «ЗА РУЛЁМ» на блезняшках Хондах вариатор выигрывал у РКП на метрах 0.
Проблемы с. Верить надо тем- кто знает в совершенстве конструкцию вариатора и понимает- что ему можно и что нельзя делать.
Здравствуйте, гость Вход Регистрация. Клуб Любителей Honda HR-V. Правила форума HR-V club. Искать только в этом форуме? Доброго времини суток, уважаемые хрюшеводы.
Не так давно стал обладателем HR-V г. Собралса в командировку, проехав километров 50 загорелса чек, а с ним и лампочк «D» перейшла в мигающий режим соответственно вариатор перешол в аварийную работу. Остановилса, сбросил на паркинг, заглушил, завел на драйв, поехал автомат как бы работал нормально «D» не мигала но чек горел. Отановился сбросил клему, обнулил комп, но о калибровке пока не знал, после обнуления компа.
Продолжил дальше, ехал не больше и при этом обороты и не более, после км езды, немного притопил на обгоне, вариатор снова перешол в аварийное положение, вся процедура заново, остановилса,заглушил завел поехал, клему уже не сбрасивал.
Начал думать что дело в высоких оборотах, но проведя експеремент понял, что не совсем так, как после очередной остановки врубил спорт режим и дал копоти. Масло в машине менялось тому, правда марку масла я не знаю, менялись ли фильтры тоже вопрос, ездила женщина.
Масло в машине менялось тому, правда марку масла я не знаю, менялись ли фильтры тоже вопрос, ездила женщина.
Заехал на фирменное сто, бараны баранами, но об этом надо совсем другую тему. Вобщем прочитав все темы на форуме, решил начать с масла и фильтров, за одно думаю промыть гидроблок — в принципе так советует мануал. БОЛЬШОЕ СПАСИБО ЗА ВСЕ ОТВЕТЫ!
Ошибка «42» — это ПРИГОВОР. От себя могу добавить: В вашем хана шкивам. Ну, или продолжайте ездить как есть, но имейте в виду, проблема будет прогрессировать и у вас в запасе тысяч пять-десять км, после чего рискуете закончить очередную поездку на эвакуаторе. Извините, пожалуйста, а при чем здесь шкивы, так как, на сколько мне собщили на сто, фактически других ошибок и не бывает, а вот поломки могут быть разные, на фирменном СТО они сказали что, они пробывали делать варики но это у них слабо получалось, пробег 97тыс.
Но вот «ая» стоит особняком, это реально приговор. И хоть формально она расшифровывается как «общая ошибка трансмиссии», за ней стоит стоит серьезный сбой в алгоритме управления вариком.
А причина этого одна: И неисправность эта — спорадические проскальзывания ремня. А раз есть проскалзывания, то процесс разрушения шкивов и ремня уже необратим.
Почему я посоветовал поскорее бежать на СТО? Потому что на самом раннем этапе можно попытаться затормозить этот процесс, заменив ремень и прошлифовав задиры на конусах шкивов, пока еще они задиры носят локальный характер. Если этого не сделать, то задиры будут прогрессировать, начнутся проблемы с гидроблоком из-за стружки и И еще, в одной теме прочитал что если при моргающей «D» работает аварийная система работы вариатора то основной блок исправен, а вот проблема в гидромуфте.
1. HR-V (вариатор) не разгоняется
Вариаторы (CVT) Рено: конструкция, проблемы, надежность
Дата публикации . Опубликовано в Секреты Рено
Мы рассматривали уже популярные механические КПП Рено, а также «автоматы».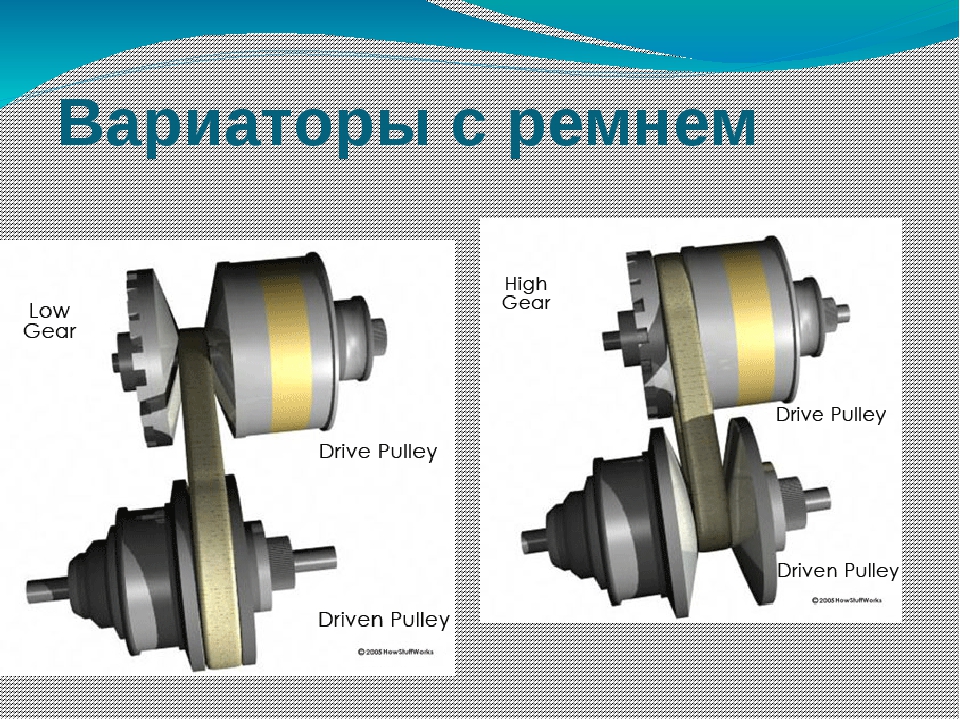 Сегодня расскажем о бесступенчатых трансмиссиях — вариаторах.
Сегодня расскажем о бесступенчатых трансмиссиях — вариаторах.
Вариатор JATCO JF011E (X-tronic CVT RE0F10A)
Вариатор JATCO JF011E, он же — CVT RE0F10A, впервые был представлен в 2005 году. По своему устройству это моделнизированный «автомат» RE0F06A образца 199 года. Коробка и ее дальнейшие модификации получили широкое распространение среди разных моделей альянса Renault — Nissan — Mitsubushi, моделей PSA и других.
C 2007 года этот вариатор ставился на Renault Megane, Scenic, Koleos.
JATCO JF011E вместе с вариаторами JF009E, JF010E, JF012E, JF015E составляет второе поколение CVT.
Конструкция у вариатора классическая: шкивы, состоящие из двух конусов, соединены ремнем. Тот передает крутящий момент от ведущего конуса к ведомому, а управление их работой (сближением или удалением друг от друга) управляет степ-мотор. Так происходит смена передаточного числа КПП. Задний ход включается с помощью набора планетарных шестерен.
Изначально конструкция RE0F10A предназначалась переднеприводным автомобилям с 1,6-2,5-литровыми моторами. Более объемным двигателям предназначалась ее усиленная версия RE0F09A, компактным — упрощенная RE0F21A. В 2012 году на смену вариатору пришла новая трансмиссия, RE0F10D.
Более объемным двигателям предназначалась ее усиленная версия RE0F09A, компактным — упрощенная RE0F21A. В 2012 году на смену вариатору пришла новая трансмиссия, RE0F10D.
Что касается эксплуатации этого вариатора, то благодаря широкому его распространению, автосервисы имеют достаточный опыт ее ремонта, а найти детали и ремкомплекты не составляет труда.
Залог долголетия любого вариатора — регулярная замена трансмиссионной жидкости и фильтрующего элемента. Иначе образующаяся металлическая стружка постепенно повреждает масляный насос и соленоиды. Обслуживать такую коробку нужно каждые 40-50 тыс. км пробега.
Другой важный момент — стиль вождения. Агрессивная езда, резкие старты, высокая скорость и частые переключения быстро убивают вариатор. Спокойному водителю при грамотном обслуживании CVT прослужит и 200 тыс. км, и больше.
Чувствителен вариатор и к температурным перепадам. Поэтому важно чистить радиатор охлаждения, не устанавливать дополнительные защиты днища для нормального теплообмена. В холодную погоду вариатор нужно прогревать: зажав педаль тормоза, несколько минут плавно переключать рычаг управления из D в R через N, и обратно.
В холодную погоду вариатор нужно прогревать: зажав педаль тормоза, несколько минут плавно переключать рычаг управления из D в R через N, и обратно.
К типичным неисправностям JATCO JF011E относят отказ от переключений передач, невозможность включить передачу, естественный или преждевременный износ деталей. Толчки при переключении вперед-назад говорят о том, что износились шлицевые соединения муфт планетарной передачи. Регулярный перегрев быстро прикончит датчики скорости вращения и клапан сброса давления. Металлическая стружка в несвежем масле критически повреждает клапан масляного насоса и соленоиды гидроблока.
Главная проблема, по заверениям владельцев — ненадежный степ-мотор в RE0F10A. Он отвечает за регулировку передаточного числа вариатора в зависимости от положения педали газа. Чаще всего ломается лапка степ-мотора. Тогда коробка зависает на одной передаче, а для замены недорогой детали приходится снимать и разбирать весь агрегат, что влетает в копеечку.
Гул и вой из коробки — признак умирания подшипников валов. Если из вовремя заменить, иногда — с ремнем — можно избежать капитального ремонта или замены самого вариатора.
Отдельно стоит выделить возмущения владельцев стоимостью обслуживания и ремонта. Но если выполнять рекомендации сервисменов и устранять проблемы на ранней стадии — это полностью пригодная к ремонту модель, которая прослужит долгое время.
Вариатор Jatco JF016E (X-tronic CVT-8 RE0F10D)
Вариатор Jatco JF016E пришел на смену популярному JF011E в 2012 году и за три года вытеснил тот со всех моделей, включая Renault Clio (2012-2013), Fluence (с 2014), Koleos (с 2014).
Эта модель относится уже к третьему поколению CVT, наряду с вариаторами JF017E, JF018E, JF019E, JF020E.
Главное конструктивное отличие новой Джатко — теперь водитель может сам через пару подрулевых рычагов переключать виртуальные передачи. Кроме того, масляный насос сделали компактнее и мощнее, число клапанов в блоке управления сократилось с 12 до 8, маловязкое масло внутри сократило трение, а силовой диапазон вариатора расширился с 6 до 7 единиц.
Требования к эсплуатации прежние: прогрев в холода и никаких экстремальных и внедорожных покатушек. Вариатор не выживет после длительного буксования и езды на сцепке. Масло нужно менять раз в 60 тысяч. Ресурс при хорошем обслуживании составит порядка 200 тысяч.
Среди поломок вариатора RE0F10D выделяют износ фрикциона гидромуфты, что проявляется резкими толчками и рывками при переключениях, а также малый ресурс гидроблока, характерный для вариатора первых лет выпуска. Гул и вибрации — признак износа недолговечных подшипников. Отдельные владельцы жалуются на небольшой неприятный толчок в начале движения, вибрации и дергания во время переключений и замерзание коробки при длительных поездках в холода.
В то же время, найти подержанную RE0F10D для замены или детали для ее ремонта не составляет труда, из-за широкого распространения коробки.
Вариатор Jatco JF010E (X-tronic CVT RE0F09A)
Вариатор Jatco JF010E конструкторы представили в 2002 году в качестве бесступенчатой трансмиссии для нового кроссовера Nissan Murano. А дальше модель начали ставить и на другие модели французско-японского альянса, включая Renault Megane (2008-2015) и Scenic (2009-2016).
А дальше модель начали ставить и на другие модели французско-японского альянса, включая Renault Megane (2008-2015) и Scenic (2009-2016).
Конструктивно эта модель отличается усиленным устройством, которое позволяет ей передавать крутящий момент мощного 3,5-литрового двигателя Мурано. Это стало возможным благодаря тщательной обработке поверхностей конусов и напылению на них тревдосплавных материалов. Но тут не обошлось без слабого звена: ремень работал на износ и рвался еще до конца гарантии. Позднее проблему пытались решить, но отголоски ее остались.
Из-за того, что этот вариатор агрегатируется с мощными двигателями, он сильно нагружен. Следовательно, все рекомендации по обслуживанию нужно выполнять еще строже. Замена трансмиссионной жидкости раз в 30-40 тыс. км, щадящая эксплуатация — и этот вариатор способен прожить до 200 тыс. км.
К типичным проблемам относят, как мы уже говорили, преждевременное вытягивание приводного ремня.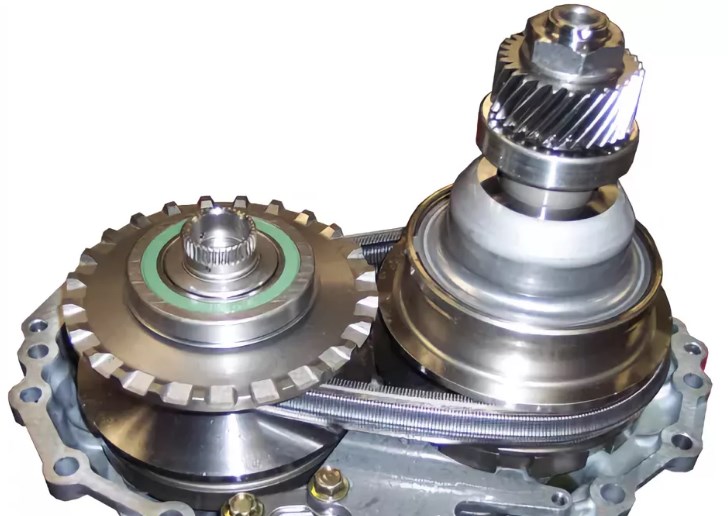 Ремень проскальзывает, передача не включается. Модернизация 2005 года улучшила ситуацию, и вариаторы, выпущенные после этой даты, не беспокоят уже этой проблемой владельцев.
Ремень проскальзывает, передача не включается. Модернизация 2005 года улучшила ситуацию, и вариаторы, выпущенные после этой даты, не беспокоят уже этой проблемой владельцев.
Степ-мотор коробки не отличается надежностью. Схема обычно такая: грязный радиатор, перегретое масло, отказ от переключений. Средство тут одно — уход и еще раз уход.
Часто заклинивает редукционный клапан масляного насоса. Из-за падения давления механические части изнашиваются быстрее, стружка забивает соленоиды и каналы кидроблока, далее — аварийный режим. Собственно, из-за перехода коробки в аварийный режим после перегрева их чаще всего и ругают на форумах владельца.
Вариатор Jatco JF015E (X-tronic CVT-8 RE0F10D)
Вариатор Jatco JF015E выпускается с 2010 года и монтируется на маломощные модели альянса Рено-Ниссан, с объемом двигателя менее 1,8 л.
Среди Renault его устанавливают на Fluence (с 2013 г.) и Kaptur (с 2016).
Конструкция коробки необычна. Это, по сути, гибрид классического клиноременного вариатора и двухступенчатого гидромеханического «автомата». Так, добавление второй передачи для движения со скоростью 100 км/ч и выше позволило сократить риски обрыва ремня. Кроме того, шкивы вариатора теперь вращаются в одну сторону, а задний ход включается все вариаторной части. Водитель имеет возможность вручную «переключать» виртуальные передачи.
Это, по сути, гибрид классического клиноременного вариатора и двухступенчатого гидромеханического «автомата». Так, добавление второй передачи для движения со скоростью 100 км/ч и выше позволило сократить риски обрыва ремня. Кроме того, шкивы вариатора теперь вращаются в одну сторону, а задний ход включается все вариаторной части. Водитель имеет возможность вручную «переключать» виртуальные передачи.
Ресурс коробки специалисты оценивают в 150-200 тыс. км. Это при щадящей эксплуатации, с учетом замены масла каждые 30 тысяч. Кроме того, такой ресурс характерен для моделей, выпущенных после 2014 года: до этого времени коробка страдала от «детских» болезней. Основные из них касались версии программного обеспечения, из-за которой износ узла происходил по ускоренной программе. Насос лепесткового типа спустя год заменили на новый. Гидроблок и подшипники тоже с течением времени конструктивно дорабатывались и заменялись.
Основные неисправности Jatco JF015E связаны с быстрым износом подшипников. Если не отреагировать на гул внутри корпуса, менять придется все четыре, а то и сам вариатор. Другая распространенная беда — выход из строя соленоидов гидроблока и редукционного клапана масляного насоса, из-за плавающей в масле металлической стружки. Признаком проблемы служит гул и вибрация коробки.
Есть и особая фирменная проблема — поломка солнечной шестерни планетарной передачи. Сварка двух частей этой детали не выдерживает нагрузки, в результате — отказ ехать вперед, водителю остается только задняя передача.
Если сравнивать Jatco JF015E с предшественницей Jatco JF011E, то вторая представляется более надежной.
Не пропустите:
- Три самых надежных мотора Рено, читать здесь
- 3 самых неудачных двигателя Рено, читать здесь.
Цепи вариатора: особенности, характеристики, сферы использования
Цепи вариатора: особенности, характеристики, сферы использованияСодержаниеУзнать больше
Вариаторные цепи – это разновидность пластинчатых цепей, которые обладают высокой прочностью в сочетании с гибкостью. Их используют в машинах и механизмах, где предъявляются повышенные требования к передаче. С помощью таких пластинчатых изделий обеспечивается бесступенчатое регулирование скоростных режимов и их плавное переключение. Они могут применяться в автомобилях, различных промышленных станках и других видах механизмов.
Вариаторные цепи всех производителей имеют сходные параметры, в России производство регулируется государственным стандартом. Это упрощает поиск подходящего аналога при поломке вариатора из-за поврежденной цепи.
Особенности конструкции вариаторных цепей
Простая и эффективная конструкция пластинчатых вариаторных цепей обеспечивает им выгодные технические характеристики. Они состоят из металлических пластинок, которые между собой скрепляются ушками, расположенными на двух пластинках одновременно. Такая система обеспечивает прочность соединения при сохранении высокой гибкости. Материалом для изготовления служат металлы и сплавы с высокой устойчивостью к механическим нагрузкам.
Специальная конструкция позволяет соблюдать высокую точность оборотов вращающегося механизма. Кроме того, при переключении соблюдается заданный уровень крутящего момента.
Эта разновидность приводных цепей обладает несколькими важными особенностями:
- Плавная регулировка скорости. С их помощью можно обеспечить бесступенчатое изменение скорости вала для комфортного и безопасного использования механизма. Автомобили с вариаторной коробкой передач обладают отличной управляемостью.
- Долговечность. По этому критерию цепная передача значительно превосходит ременную, конструкция с пластинками способна долгое время выдерживать высокие нагрузки.
- Универсальность. Цепи этого типа могут использоваться в различных сферах промышленности, автомобилестроении, грузоподъемном и сельскохозяйственном оборудовании.
Производство таких изделий в России регулируется стандартом ГОСТ 10819-93, для подбора западных аналогов применяются международные стандарты и используются таблицы соответствия.
Принцип работы: основные моменты
В состав звеньев включены пакеты из тонких пластинок, имеющих трапециевидную форму. Для замыкания пластинок используются вкладыши с полуцилиндрической формой. Набранные в обоймы пластинки соединяются ушками, которые работают по шарнирному принципу. Такая конструкция сохраняет гибкость цепи, что делает возможным плавное бесступенчатое регулирование скоростей.
Для переключения скоростного режима используются специальные механизмы – мотор-вариатор-редукторы. Правильно подобранная цепь обеспечивает быстрое беспроблемное вращение механизма и его продолжительную эксплуатацию. Если же она выходит из строя, требуется как можно быстрее найти подходящую по всем параметрам замену.
Конструктивная схема изготовления представлена на рисунке:
Основные виды вариаторных цепей
Цепи такого типа подбираются по целому ряду параметров. Это типоразмер вариатора, совместно с которым может использоваться цепь, длина, шаг пластин изделия, скоростные возможности и другие показатели. Правильный подбор по всем параметрам обеспечит стабильную работу передачи с максимальным КПД: точное соответствие параметров обеспечивает максимально полную передачу крутящего момента.
Такие цепи могут быть выполнены из различных материалов: для автомобилей и промышленного оборудования чаще всего используется металл, однако в некоторых случаях в производстве используются пластик, тефлон, силикон или иные полимерные материалы. Они не подвержены коррозии, поэтому могут использоваться в условиях агрессивных сред в промышленных цехах.
Технические характеристики и особенности выбора
Вариаторные цепи на основе металлических пластин и соединительных ушек обеспечивают сохранение заданного крутящего момента и плавное вращение валов с бесступенчатым регулированием скорости. Основные характеристики, на которые необходимо ориентироваться при выборе – это типоразмер, число звеньев, а также возможности регулировки скорости валов механизма. Кроме того, цепи различаются между собой по техническим параметрам: в их число входят размеры пластин, шаг их расположения и другие особенности.
Изделия российских и немецких производителей остаются особо востребованными на рынке. Их типоразмеры совпадают, поэтому продукция отечественных и иностранных изготовителей может быть взаимозаменяемой. Наиболее распространенные варианты в России:
- Пластинчатые цепи класса ВЦ. Они широко распространены в отечественных машинах и механизмах.
- Импортные пластинчатые цепи производства Германии. Они не всегда подходят для ремонта российского оборудования, в некоторых случаях требуется комплекс подготовительных работ перед установкой на автомобиль.
Конструктивные различия между цепями отечественного и зарубежного производства можно увидеть на рисунке:
Даже с учетом одинаковых типоразмеров есть несколько конструктивных особенностей, поэтому необходимо внимательно отнестись к подбору подходящего аналога.
Чтобы правильно подобрать цепь в соответствии со всеми характеристиками, необходимо знать типоразмер вариатора. В маркировке указывается размер и количество звеньев цепи, а также возможности регулирования, размеры элементов цепи и другие важные параметры.
Типоразмер наиболее распространенных разновидностей российских вариаторных цепей отражен в таблице:
| Обозначение цепи | Типоразмер вариатора | Диапазон регулирования | Шаг | Размеры пластин | Число звеньев | |||
| t | L | h | n | |||||
| мм | мм | мм | шт | |||||
| Ц225-3,0 | ВЦ1А.ВЦ1Б | 3,0 | 26 | 38 | 7,8 | 25 | ||
| Ц224-4,5 | ВЦ1А.ВЦ1Б | 4,5 | 26 | 38 | 7,8 | 24 | ||
| Ц224-6,0 | ВЦ1А.ВЦ1Б | 6,0 | 26 | 38 | 7,8 | 24 | ||
| Ц327-3,0 | ВЦ2А.ВЦ2Б | 3,0 | 29 | 44 | 9,3 | 27 | ||
| Ц326-4,5 | ВЦ2А.ВЦ2Б | 4,5 | 29 | 44 | 9,3 | 26 | ||
| Ц228-6,0 | ВЦ2А.ВЦ2Б | 6,0 | 26 | 38 | 7,8 | 28 | ||
| Ц335-3.0 | ВЦЗА.ВЦЗБ | 3,0 | 29 | 44 | 9,3 | 35 | ||
| Ц334-4,5 | ВЦЗА.ВЦЗБ | 4,5 | 29 | 44 | 9,3 | 34 | ||
| ЦЗЗЗ-6,0 | ВЦЗА.ВЦЗБ | 6,0 | 29 | 44 | 9,3 | 33 | ||
| Ц434-3,0 | ВЦ4А.ВЦ4Б | 3,0 | 36 | 59 | 12,3 | 34 | ||
| Ц433-4,5 | ВЦ4А.ВЦ4Б | 4,5 | 36 | 59 | 12,3 | 33 | ||
| Ц433-6,0 | ВЦ4А.ВЦ4Б | 6.0 | 36 | 59 | 12,3 | 33 | ||
| Ц541-3,0 | ВЦ5А.ВЦ5Б | 3,0 | 36 | 70 | 12,3 | 41 | ||
Вариаторные цепи немецкого производства могут применяться в следующих видах вариаторов по таблице соответствия:
| Раз- мер вариатора | Диапазон регулировки | Тип цепи |
| 160 | 6 | А225 |
| 4,5 | ||
| 3 | А226 | |
| 190 | 6 | А229 |
| 4,5 | А326 | |
| 3 | А327 | |
| 248 | 6 | А333 |
| 4,5 | А334 | |
| 3 | А335 | |
| 304 | 6 | А433 |
| 4,5 | ||
| 3 | А 434 | |
| 360 | 6 | А539 |
| 4,5 | А540 | |
| 3 | А541 |
Продукция российских предприятий по типоразмерам полностью эквивалентна немецким аналогам, однако маркировка изделий различается. Для обозначения российской продукции используется литера Ц, к которой добавляются размеры цепи и количество используемых в ней звеньев. Например, Ц225 – это цепь, в состав которой входит 25 звеньев, соответствующих стандартному типоразмеру.
Для маркировки немецкой продукции используется литера А, при этом прочие параметры будут совпадать. Соответственно, аналогом для вышеназванной цепи может стать изделие А225. Такая система значительно упрощает поиск и подбор подходящих аналогов, если необходимо заменить поврежденный компонент механизма.
Преимущества использования вариаторной передачи
Помимо плавности хода и достаточно высокой надежности, вариаторные цепи получили широкое распространение еще по нескольким причинам:
- Компактные габариты передачи. Это позволило использовать данный принцип в современных автомобилях, мототехнике и других транспортных средствах.
- Возможность использования с редукторами различных механизмов. Таблицы совместимости помогают подобрать оптимальное решение.
- Работа со стабильным соблюдением установленных технических параметров. Такая конструкция позволяет точно устанавливать передаточные числа без рывков и других нарушений плавности хода.
Вариаторная передача с ручным или автоматическим управлением рассчитана на продолжительную эксплуатацию. Автоматика упрощает использование механизма: автоматический принцип переключения передач в автомобиле облегчает управление транспортным средством.
Сфера использования вариаторных цепей
Изобретение бесступенчатой передачи крутящего момента значительно расширило возможности конструкторов и проектировщиков. Вариатор может работать в ручном или автоматическом режиме, он позволяет плавно изменять скорость вращения рабочего механизма. Это может быть не только привод в автомобиле, но и, например, судовой винт, поскольку передаточные числа меняются без прохождения ступеней. При переключении скорости не возникает характерных толчков – в этом важное отличие от классических вариантов ступенчатых передач.
Вариатор предназначен для плавного регулирования скорости без толчков и рывков, передаточное число плавно повышается или понижается до требуемого значения. Ручное управление предусматривает «ступени», которые контролируются программой – они нужны при работе механизма с высокой нагрузкой, например, при движении автомобиля в сложных дорожных условиях.
Вариаторные цепи получили широкое распространение в нескольких отраслях:
- Автомобилестроение. Автомобили с бесступенчатым механизмом переключения передач гарантируют комфортное управление в любых дорожных условиях – машина всегда будет двигаться плавно с отличной управляемостью.
- Подъёмное промышленное оборудование. Приводы с бесступенчатым переключением скоростей обеспечивают плавный и осторожный подъем груза на заданную высоту.
- Различное промышленное оборудование. Этот вариант привода применяется для конвейерных линий, станков для резки металла и выполнения других технологических операций. Его основным преимуществом является плавная работа без рывков.
- Изготовление мототехники. Вариаторный привод получил распространение в мотоциклах, квадроциклах, снегоходах и других видах транспорта, от которых требуется повышенная надежность.
- Использование в бытовых целях. Вариаторный принцип передачи крутящего момента нашел применение в различных видах бытовой техники.
Это только часть распространенных вариантов использования. Вариаторы обеспечили плавное движение конвейерных линий в различных сферах производства, их с каждым годом активнее используют в проектировке современных комфортных автомобилей и различных видов спецтехники. Принцип бесступенчатой передачи обеспечивает комфорт управления транспортным средством, скорости могут меняться в ручном или автоматическом режиме.
Продажа цепей для вариаторов в компании «Цепьинвест»
Организация поставляет продукцию российского и зарубежного производства, по каталогу предлагается подобрать цепи любого типоразмера с подходящим набором характеристик. Долговечная продукция строго соответствует требованиям российского стандарта 10819-75, а также его немецкому аналогу. Качественные компоненты приводного механизма обеспечат ему безотказную работу даже при повышенных нагрузках. Вариатор предназначен для длительного использования, он рассчитан на продолжительную бесперебойную эксплуатацию.
Если подходящего типоразмера нет в каталоге, возможно изготовление по специальному заказу. Предлагаются поставки партий любого объема, изготовление на заказ позволит решить проблему любой сложности и выполнить нестандартные требования. Свяжитесь с менеджером компании «ЦЕПЬИНВЕСТ» и обсудите все условия поставок. Все разновидности продукции предлагается заказать по невысокой стоимости, возможны постоянные поставки.
Устройство и ремонт вариатора (CVT)
В этой небольшой статье мы немного расскажем об устройстве вариатора и принципах его работы. Прежде всего, вариатор – это бесступенчатая трансмиссия, которая имеет внешнюю систему управления.
Также, как и в АКПП крутящий момент на трансмиссию передает гидротрансформатор. Правда в случае с вариаторами встречаются агрегаты, в которых используется стартовый пакет. Эта конструкция широко применяется в автомобилях AUDI.
В вариаторе крутящий момент изменяется за счет изменения диаметра конусов, поэтому планетарные редукторы и фрикционные муфты используются не как широко, как в АКПП. Две фрикционные муфты обеспечивают движение автомобиля вперед и назад, а планетарная передача вообще не изменяет крутящий момент, а только обеспечивает движение задним ходом.
Принцип изменения крутящего момента в вариаторе следующий. Когда автомобиль начинает движение, ведущий конус приводит в движение ведомый посредством натянутой между ними цепью. При этом ведущий конус максимально разжат и имеет минимальный диаметр, а ведомый конус наоборот. По мере изменения условий движения конуса сжимаются и разжимаются, и меняют диаметр по отношению друг к другу, таким образом, обеспечивая изменение крутящего момента.
Принцип работы вариатора
Также следует обратить внимание на виды цепей. В вариаторах, установленных на наиболее мощные автомобили (Nissan Murano, Nissan Pathfinder и все вариаторы AUDI), как правило, применяются тянущие цепи. Автомобили с менее мощным двигателем (Nissan X-Trail, Mitsubishi Outlander и т.д.) оборудуются толкающими ремнями. Ремень – это стальные ленты с нанизанными на них пластинками в форме трапеции. На торцевой чисти ремень имеет протектор, который предотвращает его проскальзывание на шкивах, но со временем он снашиватся.
Система управления в вариаторе аналогична системе управления в АКПП:
- Различные датчики
- Гидроблок
- Соленоиды
О надежности этого агрегата нельзя говорить, как о постоянной величине. Ремонт вариатору может потребоваться уже после 50000 км пробега, а может не потребоваться и после 200000 км. Большое значение в данном случае имеет манера езды владельца автомобиля. Следует помнить, что самую большую нагрузку агрегат испытывает в момент начала движения. Также можно посоветовать, как можно чаще проходить процедуру замены масла.
Цены при капитальном ремонте вариатора
| Наименование работ | Стоимость в рублях |
|---|---|
| Эвакуатор | 0* |
| Диагностика вариатора | 0* |
| Снятие вариатора | От 3000 |
| Дефектация вариатора | От 2500 |
| Разборка вариатора | От 3500 |
| Сборка вариатора | От 4000 |
| Промывка системы охлаждения | 0* |
| Установка вариатора | От 3500 |
| Адаптация вариатора | 0* |
|
*Адаптация и эвакуатор бесплатно при условии капитального ремонта или ремонте гидроблока (мехатроника) |
|
Цены на дополнительные работы по ремонту вариатора
| Наименование работ | Стоимость в рублях |
|---|---|
| Эвакуатор | 2500 |
| Диагностика вариатора | 600 |
| Снятие и установка мехатроника (гидроблока) | От 3000 до 6000 |
| Ремонт мехатроника и гидроблока | От 6000 до 35000 |
| Ремонт гидротрансформатора | От 4000 до 6000 |
| Замена масла вариатора | От 1800 до 3000 |
| Замена сальника вариатора | От 600 до 1000 |
| Ремонт ЭБУ | От 6000 до 15000 |
| Адаптация вариатора | 1500 |
| Программирование | От 3000 до 15000
|
Ремонт вариатора в Москве
Что касается ремонта вариатора. В Москве много хороших сервисов по ремонту АКПП, но следует всегда уточнять каков опыт работы мастеров именно с такими агрегатами, так как существует огромное количество тонкостей. Специалисты Global Transmission каждый день сталкиваются с решением подобных задач и всегда рады Вам помочь.
Принцип работы вариатора
В процессе эксплуатации современного станочного оборудования необходимо осуществлять регулирование скорости вращения главных технологических элементов в соответствии с потребностью возникающей в ходе обработки деталей или заготовок.
Для того чтобы изменять количество оборотов шпинделя в единицу времени в станочном оборудовании применяются ступенчатые коробки скоростей. В общем и целом ступенчатые коробки скоростей отличаются надежностью, доказанной временем, однако имеют и некоторые недостатки. Одним из них является то, что они не позволяют плавно регулировать количество оборотов, так как имеют фиксированный набор их значений. К тому же, для переключения скоростей необходимо останавливать двигатель станка.
Для обеспечения возможности плавного регулирования количества оборотов шпинделя используются вариаторы, специальные электрические приводы и гидротрансформаторы. Наиболее распространенными из них являются вариаторы.
Эти устройства используются для обеспечения плавного регулирования количества оборотов шпинделя главным образом потому, что они компактны, просты по своей конструкции и имеют высокий коэффициент полезного действия.
Вариатор скутера
В технике вариаторами скорости именуются такие конструкции, которые обеспечивают плавное и бесступенчатое изменение числа оборотов ведомого вала в определенном диапазоне значений при фиксированном числе оборотов вала ведущего. Название этого устройства имеет латинские корни: в переводе на русский язык «variator» означает «изменитель».
В промышленном производстве наиболее широко распространены вариаторы скорости, основу конструкции которых составляют раздвижные шкивы и клиновые ремни. Они отличаются бесшумностью в работе, простотой конструкции, надежностью. К тому же в них не требуется обеспечивать значительное первоначальное натяжение ремня. Регулировка скорости вращения ведомого вала в таких вариаторах в процессе их работы осуществляется достаточно просто.
Система передачи в таких устройствах в большинстве случаев состоит из двух шкивов, которые соединены между собой клиновидным ремнем. При этом каждый из шкивов состоит из двух основных деталей, имеющих коническую поверхность. Они могут раздвигаться и сдвигаться, благодаря чему происходит изменение диаметра.
Для того чтобы увеличивать или уменьшать расстояние, на котором конусы располагаются друг от друга, применяется механический способ воздействия на один из этих шкивов. При этом второй сжимается специальной пружиной для того, чтобы обеспечить необходимое натяжение ремня.
Следует заметить, что кинематических схем конструкций вариаторов существует немало. Основная задача, которую решают эти устройства – бесступенчатое преобразование угловых скоростей, что и является главным преимуществом подобных механизмов.
Вариаторы используются в тех машинах, механизмах и агрегатах, где необходимо изменять передаточное отношение бесступенчато. К таковым относятся мотороллеры, снегоходы, квадроциклы, автомобили, металлорежущие станки, мешалки, конвейеры.
Применение этих устройств позволяет фиксировать скорость вращения и плавно регулировать ее непосредственно на ходу, благодаря чему машины используются более производительно, а эксплуатировать их оказывается удобнее.
Moped Wiki — Moped Army
- Эта статья относится к трансмиссии вариаторного типа. О ветке армии мопедов см. Вариаторы.
Вариатор является элементом бесступенчатой трансмиссии, обычно используемой на мопедах и других транспортных средствах с малым двигателем. Мопеды Motobecane, Peugeot, Derbi, Vespa, Minarelli и Honda предлагали по крайней мере одну модель с вариоматической трансмиссией.
Работа вариатора
В трансмиссияхVariomatic используются центробежные грузы для уменьшения передаточного числа двигателя при увеличении частоты вращения.Это позволяет вариатору поддерживать двигатель в пределах его оптимальной эффективности, набирая путевую скорость или меняя скорость для подъема на холм. Эффективность в этом случае может быть топливной экономичностью, снижением расхода топлива и выбросов, или энергоэффективностью, позволяющей двигателю развивать максимальную мощность в широком диапазоне скоростей.
Поскольку вариатор позволяет двигателю вращаться с постоянной частотой вращения в широком диапазоне скоростей автомобиля, поворот ручки газа заставит мопед двигаться быстрее, но не изменит звук, исходящий от двигателя, так сильно, как при использовании обычных двухскоростных или односкоростных двигателей. скорость.Это сбивает с толку некоторых гонщиков и приводит к ошибочному впечатлению об отсутствии мощности.
Марки вариаторов
Mobymatic от Motobecane
Motobecane выпустили свою первую и единственную трансмиссию на основе вариатора, Mobymatic, в 1957 году, через год после того, как голландец Хуб Ван Дорн изобрел вариатор, даже раньше, чем появился первый автомобиль с вариатором.
Mobymatic состоит из шкива переменного размера, который приводится в движение от двух до четырех утяжеленных шарикоподшипников и соединен с двухфункциональным автоматическим сцеплением.Шкив вариатора вращает шкив фиксированного диаметра, прикрепленный к цепи главной передачи.
Коробка передач Mobymatic входила в стандартную комплектацию моделей Motobecane вплоть до их последнего выпуска в начале 2000-х годов. Единственная разница между ранними моделями и более поздними выпусками заключалась в отказе от ключа Woodruff.
Несмотря на то, что это не лучшая конструкция с точки зрения возможности настройки или характеристик сцепления, это была недорогая рабочая лошадка, которая не требовала обслуживания в течение всего срока службы двигателя, кроме регулярной подачи смазки через пресс-масленку каждые несколько сотен миль.
Руководство по разборке вариатора Motobecane.
Вариатор Vespa
ВариаторVespa устанавливался на всех их роскошных моделях мопедов, Bravo, Grande, Vespa Si, и даже на высококлассной версии их экономичной модели, Vespa Ciao Deluxe. Этот привод отличается от Mobymatic тем, что разделяет механизмы сцепления и вариатора, использует двойные регулируемые шкивы и полностью исключает главную цепную передачу. Вариатор приводится в движение от кривошипа двигателя с помощью регулируемого шкива, приводимого в действие под весом роликов.Ремень протягивается между двигателем и задним колесом, где расположены муфта сцепления и рессорный шкив. Пружинный шкив держит ремень в напряжении, требуя, чтобы два шкива двигались относительно друг друга, как это делают французские шкивы. У Vespa также есть коробка передач внутри ступицы заднего колеса, где выходной сигнал вариатора снижается на передаточное число главной передачи, а затем применяется к колесу.
Вариатор Vespa использует пять роликовых грузов. Отсутствие симметрии этой конструкции означает, что характеристики вариатора не могут быть изменены путем снятия грузов.однако некоторые модели поставлялись с шестью или восемью вариаторами веса.
Honda Вариатор
Honda по сути скопировала дизайн своего вариатора и, возможно, всего своего мопеда PA50 с Vespa Bravo. Они используют те же функции, но с некоторыми техническими отличиями.
Съемник сцепления для Honda TRX 500 Rubicon отделяет задний толкатель кулачка вариатора Hobbit и неподвижную ведущую поверхность — Никаких разрушений или других жестоких методов не требуется — Спасибо компании smallbikewithmotor за выяснение этого
Вариатор Дерби
Есть 6 вариаторов веса и 3 вариатора веса для Derbi (6 весов совместимы с Honda Hobbit).Есть также вариаторы производительности, такие как вариатор TJT. Чтобы лучше понять функции двойных вариаторов и контрпружин, прочтите следующую ссылку http://www.apriliaforum.com/forums/showthread.php?t=8960
Peugeot Вариатор
Система вариатораPeugeot, используемая на большинстве моделей мопедов Peugeot (в первую очередь, , а не 102SP), очень похожа на систему, используемую в Motobecane, хотя системы не взаимозаменяемы. Вариатор с центробежным приводом от веса и интегрированной муфтой соединен с большим шкивом фиксированного диаметра, прикрепленным к цепи главной передачи.Натяжение ремня поддерживается постоянным за счет того, что весь двигатель вращается вниз на опорах при увеличении скорости, а пружина возвращает его в исходное положение при уменьшении.
Базовая функция вариатора, прочтите это или кто-то прикрепит его к нашей вики http://www.apriliaforum.com/forums/showthread.php?t=8960
Настройка вариатора
См. Настройку вариатора
(PDF) Новый подход к конструкции вариатора с резиновым клиноременным приводом с регулируемым крутящим моментом
1424 M Cammaller i
9 Sorge, F., Беккари, А., и Каммаллери, М. Оперативник
, чтобы максимально приблизить передаваемый крутящий момент.
Характеристика вариатора для улучшения вариатора. В
, насколько это возможно, до требуемого крутящего момента, на протяжении всего рабочего поля
Труды Международной конференции JSME
.
по передаче движения и мощности, Фукуока,
Существующие закрытые решения для механики
Япония, 15–17 ноября 2001 г., 751–756.
резиновых клиновых ремней были использованы для решения всего
10 Sorge, F.Качественно-количественный подход к системе уравнений привода
и поправка — это
Механика клинового ремня. Пер. ASME, J. Mech. Des., 1996,
предложили учесть также жесткость ремня.
118, 15–21.
11 Зорге, Ф. Простая модель для осевого усилия в
Обширные эксперименты, проведенные на подходящем клиноременном приводе
. Пер. ASME, J. Mech. Des., 1996, 118,
испытательный стенд в установившемся режиме, проверка
589–592.
анализ неплохо.
Таким образом, предлагаемая модель является эффективным инструментом
для проектирования или проверки этого типа трансмиссии
ПРИЛОЖЕНИЕ 1
и предлагает очень интересные возможности в отношении саморегулируемых раздельных приводов
. Фактически, двухходовой привод
Обозначение
налагает очень разные граничные условия по сравнению с блоком CVT
по сравнению с простым методом, и крутящий момент
C
требуется различное усилие зажима для каждого среднего диаметра
d винтовая направляющая
привода.
f коэффициент трения ремень – шкив
F
0
предварительная нагрузка на пружину
F
z
осевое усилие ремня
F
zact
осевое усилие привода
ACKNOWMENT
h Межосевое расстояние шкива
k
0
жесткость Параметр клинового ремня (см. Приложение 2)
Автор выражает признательность компании «Министро дель
К», жесткость пружины
Istruzione, dell ‘Universita
`
e della Ricer ca for financial
L длина ремня
поддержка этого исследования.
M Общая масса ролика
n угловая скорость
q масса ленты на единицу длины
ССЫЛКИ
r радиус ролика
R радиус намотки
1 Beccari, A. and Cammalleri, M. Неявное регулирование
S
f
fl клиновой ремень exural
для автомобильных вариаторов. Proc. Instn Mech. Engrs,
Часть D: J. Automobile Engineering, 2001, 215 (D6),
T
1
Натяжение ремня натяжения
697–708.
T
2
Натяжение ремня со слабой стороной
2 Beccari, A., Cammalleri, M., and Sorge, F. Experi-
Скорость клинового ремня
мысленные результаты для двухрежимной раздельной передачи Вариатор. VDI
x
G
координата центра роликов
Бер., 2002, 1709, 165–178.
x
P
Координата профиля криволинейной рампы
3 Оливер, Л. Р., Хорнунг, К. Г., Свенсон, Дж. Э. и
y
G
координата центра ролика
Шапиро, Х.N. Расчетные уравнения для скорости и координаты
y
P
профиля криволинейной рампы
Клиноременная передача с регулируемым передаточным числом с регулируемым крутящим моментом.
SAE paper 730003, 1973.
4 Ким, Х., Ли, Х., Сонг, Х. и Ким, Х. Анализ
полуугловой канавки
резиновый ремень вариатора вариатора с механическими приводами. В
b угол касательной к центру ролика
Труды международной конференции JSME
траектория и ось шкива
по передаче движения и мощности, Фукуока,
c угол наклона плоской рампы
Япония, 15–17 ноября 2001 г., 757–762.
d угол наклона винтовой направляющей
5 Sheu, KB, Chiou, ST, Hwang, WM, Wang, TS,
Dx осевое смещение полушкива
и Yan, HS Новые гибридные АКПП
g
s
КПД вариатора
для мотоциклов. Proc. Natn. Sci. Граф. ROC A, 1999,
23 (6), 716–727.
г
т
КПД вариатора по крутящему моменту
6 Герберт, Г.Механика тягового ремня, 1999 (Chalmers
h угол намотки ремня
University of Technology, Go
¨
teborg).
h
s
Угол скольжения ремня
7 Dolan, JP and Worley, WSC Замкнутая форма приблизительно
t Передаточное отношение кинематической скорости вариатора
Сопряжение с решением проблемы усилия и проскальзывания клинового ремня
= n
b
/ n
a
уравнений. Пер. ASME, J.Мех. Des., 1995, 107,
t
v
геометрическое передаточное число вариатора
292–300.
= R
a
/ R
b
8 Miloiu, G. Druckkraft in stufenlosen Getrieben II.
Antriebstechnik, 1969, 8, 450–459.
Q угол трения ремень – шкив
D17004 © IMechE 2005Proc. IMechE Vol. 219 Часть D: J. Automobile Engineering
Пример интеллектуального трибологического проектирования для улучшения характеристик наземного транспортного средства
Мы анализируем с точки зрения эффективности и тяговых возможностей недавно запатентованный тяговый привод, называемый двухроликовым полнотороидальным вариатором (DFTV). ).Мы сравниваем его характеристики с однолатковым полнотороидальным вариатором (SFTV) и одинарным полутороидальным вариатором (SHTV). Моделирование этих вариаторов связано со сложными трибологическими проблемами; характеристики тяги и эффективности зависят от трибологических явлений, происходящих на границе раздела между роликами и дисками, где смазка подвергается очень жестким эластогидродинамическим режимам смазки. Интересно, что DFTV демонстрирует улучшение механического КПД в широком диапазоне передаточных чисел и, в частности, при передаточном числе единиц, как в таких условиях, когда DFTV допускает нулевое вращение, тем самым значительно улучшая его тяговые возможности.Очень высокий механический КПД и тяговые характеристики DFTV используются для исследования характеристик системы рекуперации кинетической энергии на основе маховика (KERS), где КПД вариатора играет важную роль в определении общей эффективности рекуперации энергии. Возможности повышения энергии и КПД в оба конца рассчитываются для трех различных вариаторов, рассмотренных в этом исследовании. Результаты показывают, что потенциал рекуперации энергии механического KERS может быть улучшен при правильном выборе вариатора.
1. Введение
Последние разработки в области автомобилестроения связаны с конструкцией трансмиссий с целью улучшения эксплуатации теплового двигателя в соответствии с требованиями снижения расхода топлива и выбросов загрязняющих веществ [1–3 ].
Для достижения этих целей изучаются и разрабатываются гибридные силовые агрегаты. Среди всех возможностей некоторые исследования утверждают, что механические гибриды более эффективны и дают наибольшие преимущества с точки зрения снижения расхода топлива и выбросов загрязняющих веществ.Было проведено несколько исследований, чтобы оценить эффективные преимущества, которые такие системы могут дать в обычных легковых и грузовых автомобилях при современном уровне развития техники. Результаты расчетов показывают, что повышение экономии топлива до 25% может быть получено в обычных легковых и грузовых автомобилях, что также может быть улучшено за счет уменьшения размеров двигателя [4–7]. Бесступенчатые приводы — это ядро механических гибридов. Цепно-ременные бесступенчатые трансмиссии (CVT) широко изучались либо теоретически, либо экспериментально [8–10]; однако ограничения максимального передаваемого крутящего момента и возможностей управления сделали вариаторы с тороидальным тяговым усилием реальной альтернативой для разработки трансмиссий CVT [11].Тороидальный тяговый привод состоит из входных и выходных дисков, которые соединены соответственно с ведущим и ведомым валами и имеют такую форму, чтобы образовалась тороидальная полость. Приводной ролик, вращающийся внутри тороидальной полости, используется для передачи крутящего момента от ведущего диска к ведомому за счет срезающего действия эластогидродинамической масляной пленки; кроме того, наклон приводного катка позволяет выполнять маневры переключения передач. Что касается тороидальных вариаторов, которые фактически представлены на рынке для автомобильных приложений, основное геометрическое различие заключается в положении центра наклона ролика (точка O на рисунке 1), который может совпадать или не совпадать с центром тороидальной полости. .В первом случае получается так называемый полнотороидальный вариатор (см. Рисунок 1 (б)), во втором случае получается полутороидальный вариатор (см. Рисунок 1 (а)). На Рисунке 1 (c) показана новая запатентованная тороидальная геометрия [12], так называемый полный тороидальный вариатор с двумя роликами (или DFTV); два ролика, вращающихся в противоположных направлениях, расположены внутри тороидальной полости с целью уменьшения потерь вращения при контакте ролика с диском; Кроме того, коническая форма ролика позволяет уравновесить нормальные силы, что делает ненужным использование упорного роликового подшипника.Таким образом, можно объединить основные преимущества двух тороидальных геометрий с одним роликом (т.е. SHTV и SFTV), что приведет к значительному повышению общей эффективности передачи [13, 14]. Диапазон передаточных чисел и эффективность регулируемых приводов являются ключевыми характеристиками для применения в механических гибридных системах. Для оптимизации условий эксплуатации KERS необходимо найти компромисс между большим разбросом передаточных чисел и хорошей эффективностью как в прямом, так и в обратном направлении. Было показано (см. [15]), что архитектуры с шунтированными вариаторами ([16, 17]), которые увеличивают разброс передаточных чисел переменного привода, не могут улучшить производительность KERS из-за потери эффективности, в частности, в обратная операция (см. также [18]).По этим причинам в данной статье мы сосредоточены на характеристиках стандартных тороидальных тяговых приводов с передаточным числом, охватывающим диапазон от 0,5. до 2. В частности, представлена полностью заполненная модель эластогидродинамической смазки (EHL) для анализа характеристик тяги и эффективности недавно запатентованного вариатора с тороидальным тяговым приводом (DFTV) и сравнения его с более стандартными решениями в качестве единственного роликовый полнотороидальный вариатор (SFTV) и одинарный роликовый полутороидальный вариатор (SHTV).Результаты используются для исследования производительности системы рекуперации кинетической энергии (KERS) на основе маховика, где эффективность вариатора играет важную роль в определении общей производительности рекуперации энергии.
2. Тяга и КПД тороидальных приводов
В этом разделе мы определяем основные геометрические и кинематические характеристики тороидальных вариаторов. На рис. 2 — это первый главный радиус входного и выходного дисков и второй главный радиус соответственно входного и выходного дисков.В случае DFTV каждый приводной ролик имеет коническую часть и тороидальную часть; ролики соприкасаются по конической части, в то время как тороидальная часть имеет форму типичного полутороидального ролика и контактирует с входным или выходным диском. Радиус кривизны сечения, перпендикулярного оси ролика, мы называем вторым главным радиусом. Для практических аспектов полезно определить коэффициент соответствия и соотношение сторон, где — эксцентриситет. Важным параметром управления является угол наклона.Мы можем выразить формулировку безразмерных радиусов кривизны дисков как функцию угла конуса и угла наклона (см. Рис. 2) как и, где и. Из геометрических соотношений также получаем. Мы также определяем геометрическое соотношение скоростей как отношение радиальных координат и; а именно,. Сказав входную угловую скорость и скорость вращения выходного диска, мы определяем передаточное отношение как. Процентные различия скоростей пар скользящих контактов учитываются путем определения входных и выходных коэффициентов ползучести, соответственно, то есть, и.Коэффициент скольжения роликов определяется как, где и — угловые скорости двух роликов, вращающихся в противоположных направлениях. Передаточное отношение можно выразить как с участием . Для каждого ролика из пары роликов мы можем определить точку, которая представляет собой точку пересечения касательных к тороидальной полости в точках контакта ролик-диск и определяется как точка пересечения абсолютных осей вращения ролика и диска. . Угловые скорости ролика относительно входного и выходного дисков и имеют компоненты скорости вращения, и, которые могут быть направлены внутрь или наружу.Выбирая правильное значение угла падения конуса, можно получить нулевые скорости вращения при. Коэффициенты спина можно определить как Следуя тому же подходу, который был предложен в [13, 14], определим коэффициент тяги как отношение тангенциальной силы на границе ролик-диск и нормальной нагрузки к коэффициенту спинового момента, где — спиновый момент и радиальный радиус диска. координата точки контакта. Из уравнения количества движения, примененного к роликам, вращающимся в противоположных направлениях вокруг каждой оси ролика, параметры и были рассчитаны согласно [13, 14].Рассмотреть возможность учитывая, что угол (см. рисунок 2) и радиальные координаты в безразмерном виде, а именно, и. Термин представляет собой безразмерные потери крутящего момента из-за роликовых подшипников на осях ролика вариатора, которые были оценены в соответствии с технической документацией SKF [19]. Из уравнений равновесия дисков мы можем оценить эффективные коэффициенты крутящего момента на входной и выходной стороне вариатора как с и можно интерпретировать как эффективные коэффициенты крутящего момента на входной и выходной стороне вариатора.В предыдущих соотношениях мы рассмотрели возможность размещения набора роликов внутри тороидальных полостей. Кроме того, мы можем выразить силу тяги, действующую в осевом направлении диска, как функцию нормальной нагрузки и угла наклона: Общий механический КПД можно записать как Модель полностью затопленного изотермического контакта [13, 14, 20] была использована для расчета касательных напряжений на границе соприкасающихся элементов и, таким образом, коэффициентов тяги и вращения.
3. Модель контакта
Мы различаем условия контакта на границе раздела ролик-диск, где площадь контакта эллиптическая, и на границе раздела ролик-ролик, где вместо этого площадь контакта имеет прямоугольную форму. Для изучения контакта между двумя изогнутыми профилями и мы определяем эквивалентный модуль Юнга, выраженный как функцию модуля упругости и коэффициента Пуассона каждого элемента в контакте [20] и эквивалентный радиус кривизны, с где нижний индекс относится к ролику и диску, и,, и (в случае полутороидального и полнотороидального).Эквивалентный радиус кривизны тогда определяется как В случае конического контакта роликов с роликами мы определяем, как средний радиус качения конической части роликов, тогда как. Тогда мы можем определить эквивалентный радиус кривизны как Результаты упруго-гидродинамической теории использованы для описания режима смазки на площади контакта. В частности, мы рассмотрели эффект вязкости-давления с помощью формулы Роланда: Из-за очень высоких скоростей сдвига смазка демонстрирует нелинейную зависимость между напряжениями сдвига и скоростями деформации сдвига в соответствии с общим правилом, используемым в теории пластичности для разделения деформации сдвига по разным направлениям.Мы пишем где функция представляет нелинейное поведение тягового масла и — эквивалентное напряжение. Следуя реологической модели, предложенной Бэром и Винером, функция принимает вид где — предельное напряжение сдвига. Оценка деформации сдвига выполняется в предположении, что для условий жесткого ЭДЖ распределение давления близко к распределению Герца (за исключением пика, близкого к задней кромке контакта), и с учетом того, что большая часть контакта характеризуется практически постоянной толщиной смазочной пленки, которая, в свою очередь, рассчитывается по формулам EHL.Следовательно, мы можем написать Вспоминая, что местное вращательное скольжение полностью определяется как функция ползучести, скольжения и коэффициента вращения, можно вычислить величины,,, и коэффициент тяги ролик-ролик, просто интегрировав касательное напряжение по контактная площадка. Как только эти величины получены, оперативно определяются КПД и общие тяговые характеристики вариатора (см. Также [13, 14]).
4. Моделирование поведения KERS
В этом разделе мы используем механическую модель трех тороидальных тяговых приводов для исследования общих характеристик механической гибридной трансмиссии.Среди всех возможных конфигураций механических гибридных силовых агрегатов [7] рассматривается маховик KERS, соединенный с карданным валом автомобиля через фрикционную муфту (см. Рисунок 3). Эта конфигурация дает больше улучшений экономии топлива, чем другие, когда она работает совместно с системой остановки и перезапуска [7]. Моделирование было выполнено с помощью симулятора обратной динамики трансмиссии автомобиля. Цикл движения задается в виде скоростной модели, а параметры трансмиссии рассчитываются в обратном порядке с помощью кинетической, кинематической моделей и моделей эффективности.В этой статье основное внимание уделяется потенциалу рекуперации энергии KERS, а коробка передач и двигатель не включены в модель. Необходимы дальнейшие исследования, чтобы оценить потенциал KERS по экономии топлива и сокращению выбросов. Трансмиссия с KERS, рассматриваемая в данном исследовании, состоит из колес, дифференциала и главной передачи (FR), ведущей муфты KERS, тороидального вариатора, главной повышающей передачи и высокоскоростного вращающегося маховика. Мы определяем два показателя производительности KERS: повышение KERS и эффективность в оба конца.В разделе 2 трансмиссии (см. Рисунок 3) называется крутящий момент, необходимый для движения транспортного средства в соответствии с графиком движения, который может быть положительным или отрицательным. Определяется величина, которая равна только тогда, когда, в противном случае равна нулю. Крутящий момент, который на самом деле задается KERS в разделе 2, равен, и он может быть положительным (режим повторного использования) или отрицательным (режим восстановления). Кроме того, мы определяем: который равен если, нулю в противном случае; который равен если, и нулю в противном случае. Повышение KERS определяется как где — продолжительность одного рабочего цикла, а — угловая скорость вала 2.Повышение KERS — это энергия, передаваемая KERS на карданный вал автомобиля за цикл, деленная на энергию, необходимую для соблюдения графика движения за цикл, и рассчитанная в Разделе 2 трансмиссии.
Эффективность передачи туда и обратно рассчитывается как: Эффективность в обоих направлениях — это энергия, фактически переданная KERS карданному валу транспортного средства за цикл, деленная на энергию, фактически передаваемую карданным валом KERS за цикл.
5. Результаты
В этом разделе мы сначала представляем основные характеристики тяги и эффективности трех исследованных тороидальных тяговых приводов, а затем сосредоточимся на эффективности рекуперации энергии геометрии KERS, основанной на таких трансмиссиях.Свойства жидкости приведены в таблице 1, а геометрические данные трех вариаторов — в таблице 2.
| ||||||||||||||||||
| |||||||||||||||||||||||||||||||||
5.1. Тяговые характеристики DFTV
На Рисунке 4 показаны характеристики тягового усилия и эффективности двойного тороидального тягового привода (DFTV). Расчеты проводились при постоянных значениях частоты вращения первичного оборота и нормальной контактной нагрузке кН. Интересно, что, поскольку вариатор DFTV представляет незначительные значения потерь вращения при единичном соотношении (синяя кривая на рисунке 4 (а)), в этом случае кривая тяги увеличивается очень быстро по мере увеличения ползучести от нуля. Однако при различных соотношениях скоростей (красная кривая на рисунке 4 (а)) и (черная кривая на рисунке 4 (а)) наличие потерь на вращение определяет сильное уменьшение тяги в зависимости от крутизны ползучести.Линейное поведение наблюдается до тех пор, пока не будет достигнуто значение ползучести, где кривая тяги представляет собой типичный изгиб, соответствующий максимально достижимому значению выходного безразмерного крутящего момента. На рисунке 4 (b) мы показываем механический КПД вариатора как функцию безразмерного входного крутящего момента. Следует отметить, что при КПД принимает очень высокие значения, примерно равные большей части диапазона входного крутящего момента. Однако, когда (и, следовательно) приближается к своему предельному значению, КПД быстро падает из-за быстрого увеличения коэффициента ползучести.При крайних отношениях: (красная кривая), (черная кривая) на Рисунке 4 (b), тенденция зависимости напоминает поведение, наблюдаемое для, но значения эффективности значительно меньше во всем диапазоне крутящего момента, с максимальным значением близко к .
5.2. Сравнение DFTV, SFTV и SHTV
На рис. 5 показано количественное сравнение различных тороидальных вариаторов с точки зрения тяговых характеристик и эффективности. Расчеты проводились при заданных постоянных значениях частоты вращения первичного вала и нормальной нагрузки кН.Безразмерный выходной крутящий момент отображается в зависимости от общего коэффициента ползучести, тогда как эффективность представлена как функция входного безразмерного крутящего момента. Во всех случаях мы наблюдаем, как и ожидалось, почти линейное увеличение as от нуля. Однако по мере увеличения ползучести кривая начинает отклоняться от линейного тренда и достигает значения насыщения, соответствующего максимальному передаваемому крутящему моменту. Интересно, что наклон линейной части трех кривых тяги различается для трех разных вариаторов, а также изменяется при изменении геометрического передаточного числа.Во всех случаях SFTV показывает значительно худшее поведение по сравнению с двумя другими типологиями. Интереснее сравнить ШТВ и ДФТВ. При передаточных числах и два вариатора демонстрируют почти тяговые возможности, однако DFTV работает значительно лучше, чем SHTV, с точки зрения механического КПД. DFTV сильно превосходит SHTV как с точки зрения тяги, так и с точки зрения механической эффективности при геометрическом соотношении скоростей из-за очень ограниченного количества вращательного движения и вращательного момента.
5.3. KERS Performance
Моделирование характеристик KERS проводилось на данных типичного городского автомобиля (более подробная информация приведена в [15]). Ниже приведены основные характеристики устройства KERS. Мы считали массу вариатора KERS равной примерно. Моделирование проводилось с учетом маховика со следующими характеристиками: инерция маховика, минимальная скорость маховика и максимальная скорость маховика (верхняя и нижняя границы были выбраны согласно [17]).Анализируемый механический гибрид может использоваться для вождения в городских условиях. Максимальная энергия, которая может храниться в маховике, составляет около 178 кДж, что соответствует кинетической энергии транспортного средства на скорости 60 км / ч. Моделирование проводилось в соответствии с городским графиком движения FTP-75. График движения рассматривается как периодическая функция, которой должен следовать автомобиль. Состояние заряда маховика одинаково в начале и в конце цикла [4].Чтобы сравнить характеристики, которые могут быть достигнуты с различными вариаторами, для любого исследуемого тороидального тягового привода, передаточное число конечного множителя было оптимизировано, и это оптимальное значение использовалось для проведения моделирования. Механический КПД DFTV, SHTV и SFTV был рассчитан с помощью аналитических моделей, представленных в предыдущих разделах. Мы предполагаем, что система зажима позволяет контролировать усилие зажима, чтобы оптимизировать эффективность тороидального тягового привода для любого заданного передаточного числа и входного крутящего момента.Чтобы выполнить моделирование в этих рабочих условиях, был вычислен КПД с оптимальным значением нормализованного входного крутящего момента с различными передаточными числами, и результаты показаны на рисунке 6. Разброс передаточного отношения трех вариаторов равен 4, с передаточным числом от до. Показано, что КПД SFTV меньше КПД DFTV и SHTV во всем диапазоне передаточных чисел. DFTV превосходит SHTV только в промежуточном диапазоне значений передаточного числа.Результаты нашего моделирования показаны на Рисунке 7. Повышение KERS (см. Рисунок 7 (a)) в графике движения FTP-75 равно 20,4% с DFTV и 20,2% с SHTV (разница почти незначительна), тогда как в случае SFTV он равен 18,4%. Поскольку SFTV в настоящее время используется в механических гибридных системах, наши результаты показывают, что правильный выбор вариатора может привести к улучшению наддува KERS примерно на 10%. Аналогичные результаты показаны в расписании движения FTP. В этом случае надбавка KERS составляет около 10.2% с SFTV, 11,3% с SHTV и 11,5% с DFTV. Как и ожидалось, лучшие характеристики получаются в городской езде. На рисунке 7 (b) показана общая эффективность KERS в обоих направлениях в расписаниях движения FTP-75 и FTP и сравнение результатов, полученных с помощью SFTV, SHTV и DFTV. На эффективность в оба конца не сильно влияет стиль вождения, тогда как эффективность SFTV примерно на 7% меньше по сравнению с DFTV и SHTV. В нашем анализе мы рассмотрели разброс передаточных чисел, близкий к 4 для всех тороидальных тяговых приводов.Однако мы замечаем, что регулируемый привод с большим разбросом передаточных чисел может работать даже лучше при условии, что эффективность остается достаточно высокой [15]. Однако двойная цель разработки вариатора, обладающего как большим разбросом передаточных чисел, так и высоким механическим КПД во всем диапазоне передаточных чисел, является довольно сложной задачей. Различные вариаторы могут предоставлять разные возможности для дальнейшего улучшения, и, с этой точки зрения, дальнейшие исследования должны касаться оптимизации конструкции DFTV и SHTV для применения в KERS.
6. Выводы
Мы проанализировали эффективность и тяговые характеристики трех тороидальных тяговых приводов: SFTV, SHTV и недавно запатентованного DFTV. Последний был спроектирован таким образом, чтобы объединить преимущества двух других существующих тороидальных геометрий и показать повышенную эффективность и тяговые характеристики. Вариатор DFTV состоит из набора конических роликов, вращающихся в противоположных направлениях, которые помещены в тороидальную полость; Геометрические характеристики силовых роликов позволяют снизить потери вращения в широком диапазоне передаточных чисел и избавиться от упорного шарикоподшипника, который способствует потерям крутящего момента геометрии полутороидального типа.Чтобы оценить характеристики тороидальных тяговых приводов, мы разработали полностью затопленную модель изотермического контакта, основанную на результатах теории смазки EHL. Наши расчеты показали эффективность геометрических характеристик DFTV с точки зрения снижения спиновых потерь и повышения общей эффективности. Очень высокий механический КПД и тяговые характеристики DFTV были затем использованы для исследования производительности механической системы рекуперации кинетической энергии (KERS).Возможности повышения энергии и общая эффективность приема-передачи были рассчитаны для DFTV, SHTV и SFTV, и было обсуждено их сравнение. Результаты показали, что выбор DFTV и SHTV приводит к очень значительному увеличению мощности наддува KERS при движении по городу, что примерно на 10% больше, чем результат, достигнутый с помощью SFTV.
Sariel.pl »Бесступенчатая трансмиссия вариатора
Дом > Идеи> Бесступенчатая трансмиссия с вариаторомБесступенчатая коробка передач с вариатором
Вариатор более совершенной конструкции.
Недавно разработав простой вариатор, я захотел попробовать более продвинутое решение и воссоздать реальный вариатор CVT. Вместо конусов в вариаторах используются специальные тарелки, которые сдвигаются или разводятся, при этом между ними втыкается широкий эластичный пояс. Форма посуды означает, что в зависимости от их расстояния друг от друга площадь контакта между посудой и лентой меняет свой диаметр с большего на меньший и наоборот. Есть две пары тарелок, одна на входном валу, а другая — на выходном валу, и изменение их контактных площадей — что обычно делается прямо противоположным образом для поддержания натяжения ремня — эффективно изменяет соотношение входа / выхода.
Версия LEGO стала возможной только благодаря использованию очень специфических деталей LEGO: тарелок Scala 5 × 5 и цельного протектора из цельной резины. Теоретически механизм мог работать всего с двумя двигателями: один для въезда, другой — для его переключения, но это закроет центр трансмиссии. Я хотел, чтобы это было хорошо видно на видео, поэтому для переключения я использовал 4 отдельных мотора. В результате конструкция трансмиссии была огромной и непрактичной, но она работала. Как и мой предыдущий вариатор, он был непригоден для работы с высокими нагрузками, потому что под нагрузкой ремень начинал скользить по посуде.Проблема усугублялась тем, что тарелки не имели традиционных осей или отверстий для штифтов, поэтому пары тарелок на самом деле не были соединены общей осью. Это означало, что только одна тарелка в каждой паре фактически приводилась в действие напрямую, а другая приводилась в движение только ремнем между ними. В реальных вариаторах обе тарелки приводятся в движение, что, безусловно, помогает уменьшить проскальзывание.
Для этого варианта трансмиссии нет инструкций, так как он очень непрактичен и был разработан только для проверки концепции.
Видео:
Ременная система и шкив с регулируемым шагом для промышленной регулируемой скорости до 180 кВт
Ременная система с регулируемым шагом шкива для промышленной регулируемой скорости до 180 кВтa |
| Серия RGAE — Механический вариатор скорости «Приводы с регулируемым шкивом». | ||||||||||||||||||
| ||||||||||||||||||
| Хотите контролировать много лошадей
мощность и нужна переменная скорость? Серия RGAE от Varmec — это ваш
решение.RGAE предлагает полностью прямой, простой и
надежная конструкция и проверенный метод управления скоростью в тяжелых условиях
промышленное перекачивание, транспортировка, смешивание и многие другие регулируемые приводы
приложения, где правят надежность и простота. RGAE использует шкивы и ремни производства Berges GmbH и, следовательно, является взаимозаменяемым с немецким Механические частотно-регулируемые приводы Berges от 0,25 до 160 кВт, и может заменить многие приводы с регулируемыми шкивами от другие производители, использующие систему шкивов Berges.Миллионы разработчиков типа RGAE работают над мир в самых суровых условиях и почти во всех машина или оборудование, требующие надежного регулирования скорости. Мы могли бы разработать более сложная конструкция, но заказчику РГАЭ нужна простота, надежность, бесперебойная работа, низкие эксплуатационные расходы и поддержка глобальной организации вверх. RGAE — это сила, которую вы понимаете. | ||||||||||||||||||
Принципы работы Мощность передается через трение между конусом 1 на входе и приводным кольцом 2 что приводит к выводу 5 (либо напрямую, либо через 1, 2, или 3 ступени косозубых шестерен).Давление между конусом 1 и приводное кольцо 2 поддерживается пропорционально выходу крутящий момент через кулачок Dog-Clutch 4 . Пружина 3 внутри трансмиссионного вала оказывает низкое контактное давление между Конус и кольцо на холостом ходу или на холостом ходу, что также позволяет регулировать скорость. регулируется в статике или в движении; это значительный дизайн преимущество перед другими типами вариаторов. Изменение скорости достигается за счет движение двигателя по линейным направляющим через рейку 7 и шестерню 6 который приводится в действие маховиком регулировки скорости или, опционально, система привода мотор-редуктора, разработанная для электрического дистанционного управления. | В наличии со всем ассортиментом редукторов и двигателей TVT, чтобы создать свой идеальный приводное решение. | |||||||||||||||||
| ||||||||||||||||||
BigCityIdea.ком «Дизайн-Маркетинг-SEO»
Метод Монте-Карло первого порядка проектирования для анаморфных зум-объективов для кино
1.
Введение
Основная функция системы визуализации, по своей сути, — это способ отображения пространства объекта на пространство изображения. Свойства этого сопоставления, такие как относительные размеры объекта и изображения, в значительной степени определяются определенной характеристикой системы визуализации, либо эффективным фокусным расстоянием (EFL) для бесконечных сопряженных объектов, либо увеличением для конечных сопряженных объектов.В типичном случае систем, обладающих вращательной симметрией, EFL или увеличение является постоянным по азимуту вокруг оптической оси, и в результате степень отображения объект-изображение остается постоянной по азимуту. Однако постоянное азимутальное картирование не является требованием для построения изображений. Можно задаться вопросом о преимуществах отображения изображения, которое вместо этого изменяется по азимуту. Одно из таких обстоятельств было исследовано Анри Кретьеном при разработке перископа для танков. 1 , 2 С более важной информацией, появляющейся сбоку в сцене, Кретьен понял, что операторам танков требуется широкое горизонтальное поле зрения, но с как можно меньшим отверстием в резервуаре.Решением был перископ с цилиндрической оптикой для получения «растянутого» горизонтального поля зрения посредством азимутально изменяющейся карты изображения. Перископ Кретьена является примером анаморфной оптической системы, которая определяется как система, которая питается по-разному в двух ортогональных плоскостях симметрии. 3 В анаморфных системах результатом такой ортогональной разницы в мощности и ортогональной разницы в отображении изображений является то, что изображения кажутся пространственно сжатыми и растянутыми вдоль этих перпендикулярных осей.Чтобы вносить мощность по-разному по разным осям, анаморфные конструкции требуют несимметричных относительно вращения оптических элементов. Чаще всего это достигается с помощью цилиндрических оптических поверхностей, которые передают оптическую силу вдоль одной оси, но также используются разные пары призм, 4 , 5 тороидальные поверхности, 6 и оптика с градиентным показателем преломления 7 . . Анаморфная оптика очень давно использовалась в самых разных областях, начиная с начала девятнадцатого века. 8
Начиная с середины двадцатого века, с появлением «CinemaScope», анаморфные кинообъективы стали широко использоваться при съемке фильмов. 9 Анаморфные линзы изначально были разработаны в кино для захвата широкоэкранных изображений с высоким соотношением сторон, сжатых в стандартизованных форматах и форматах пленок с более низким соотношением сторон [Рис. 1 (а)]. 10 Таким образом достигается более высокое разрешение изображения и оптическая пропускная способность, чем при съемке того же широкоэкранного формата со стробированием, что означает, что верхняя и нижняя части ячейки пленки не используются [Рис.1 (б)]. Хотя сегодня доступны более индивидуализированные форматы сенсоров, анаморфные линзы остаются популярными в кино благодаря своим уникальным характеристикам изображения, включая эллиптическое боке, дифференциальную глубину резкости 11 и линейную засветку линз. Уникальным аспектом проектирования линз для кино является внимание, которое необходимо уделять этим художественным свойствам, 12 , величина которых зависит от анаморфного соотношения, а также критическая спецификация, относящаяся к мощности изображения в плоскостях симметрии.Разработка анаморфных линз также ставит множество новых проблем, с которыми не сталкиваются осесимметричные системы, в основном из-за расширенного набора существующих аберраций. 13 , 14 Наиболее важно то, что анаморфные конструкции должны устранять осевой астигматизм с обеими ортогональными плоскостями симметрии, отображаемыми на одной фокальной плоскости. 15
Рис. 1
Широкоэкранное изображение, снятое на пленочную ячейку с помощью (а) анаморфной линзы и (б) осесимметричной линзы.Анаморфное изображение пространственно сжимается в соответствии с анаморфным соотношением и заполняет всю ячейку пленки. В качестве альтернативы изображение от осесимметричного объектива должно быть стробировано, чтобы захватить полноэкранное изображение, но верх и низ ячейки пленки не используются.
Как обсуждалось, отображение пространства объекта в пространство изображения зависит от характеристики первого порядка системы формирования изображения, а именно EFL или увеличения в зависимости от сопряженного элемента изображения. Объектив с переменным фокусным расстоянием определяется как имеющий непрерывно регулируемый EFL или увеличение, что позволяет непрерывно изменять отображение изображения без необходимости перефокусировки.Это дает возможность непрерывно изменять поле зрения для заданного формата и управлять такими свойствами изображения, как глубина резкости. Эта дополнительная универсальность и необходимость в меньшем количестве объективов с фиксированным фокусным расстоянием («основных») объясняют, почему зум-объективы стали обычным явлением в киноиндустрии. 16 Конструкция зум-объективов была детально изучена, особенно в отношении необходимой конфигурации первого порядка. 3 , 17 , 18 В простейшем случае система масштабирования требует двух независимых движущихся групп оптических элементов, вариатора для изменения EFL и компенсатора для поддержания фиксированного положения изображения.Было представлено много различных методов для практического достижения этих требований первого порядка, включая методы Монте-Карло. 19 — 21
Из-за того, что в кино широко используются как анаморфные, так и зум-объективы, совместные анаморфные зум-объективы, естественно, также являются важным кинематографическим инструментом. В конструкции анаморфных зум-объективов исторически разделились анаморфные элементы и движущиеся группы зуммирования. 22 — 24 Это было сделано для простоты, но за счет увеличения размера и веса и более ограниченной коррекции аберраций.Анаморфный модуль может быть размещен либо спереди, либо сзади осесимметричного модуля масштабирования с различными оптическими эффектами. 15 Оставался вопрос, какие возможности существуют для единого комбинированного анаморфного модуля масштабирования, в котором движущиеся оптические элементы также являются анаморфными элементами. Преимущество такой сложной конструкции будет заключаться в значительном уменьшении размера и веса линзы за счет объединения двух модулей линз в один. На этот вопрос недавно впервые ответил Dodoc 15 , который представил два типа комбинированных анаморфных модулей масштабирования.С таким недавним появлением возможности этих двух типов анаморфных модулей масштабирования еще предстоит полностью оценить.
По отдельности создание высокопроизводительных анаморфных и зум-объективов представляет собой сложную задачу, поэтому задача разработки комбинированного анаморфотного зум-объектива является весьма важной. В отличие от осесимметричных конструкций, пространство дизайна с анаморфным масштабированием гораздо более изолированно, что очень затрудняет переход между различными пространствами решений. По этим причинам, имея в виду конечную цель окончательной конструкции с удовлетворительными характеристиками и производственными допусками, необходимо уделять значительное внимание конфигурации первого порядка начальной конструкции.В этой статье исследуется глобальное пространство дизайна двух новых анаморфных конфигураций масштабирования, представленных Dodoc. 15 Используя метод поиска Монте-Карло, пространства решений этих двух типов проектов полностью исследуются для статистического определения наиболее многообещающих проектных конфигураций первого порядка. Представлен метод поиска Монте-Карло, в том числе случайное генерирование анаморфных решений масштабирования первого порядка, адаптированных к системным спецификациям. Затем все сгенерированные решения можно оценить на предмет успешной трассировки лучей и сравнить на основе различных показателей производительности.Результат дает близкую к идеальной отправную точку первого порядка, которая позволит создать удовлетворительный окончательный дизайн анаморфного зум-объектива для кино.
2.
Конфигурации дизайна первого порядка
Как анаморфный, так и масштабный дизайн представляют уникальные трудности на уровне первого порядка, которые необходимо понимать индивидуально, прежде чем пытаться использовать комбинированные анаморфные конфигурации масштабирования.
Из-за потери степени вращательной симметрии анаморфные системы представляют собой уникальные конструктивные проблемы, которых нет в вращательно-симметричных оптических системах.Наиболее важно то, что содержание аберраций в анаморфных системах отличается от тех, которые обнаруживаются в осесимметричных системах. Для анаморфной системы обе ортогональные плоскости симметрии x − z и y − z обладают аберрациями Зейделя, но в разном количестве. Однако есть восемь дополнительных неосимметричных аберраций, возникающих из-за перекоса лучей, не лежащих в одной из плоскостей симметрии, как показали Юань и Сасиан. 13 , 14 Осевой астигматизм является примером такой аберрации, наблюдаемой в анаморфных, но не осесимметричных системах.Наличие осевого астигматизма в анаморфной системе можно понять, сначала рассмотрев единственный анаморфный элемент, такой как цилиндрическая линза. Для точечного источника на оси цилиндрическая линза создает осевое линейное изображение, ориентированное перпендикулярно цилиндрической оси. Чтобы создать стигматическое изображение на оси, второй анаморфный элемент должен быть ориентирован ортогонально первому и должен поддерживать положение изображения, совпадающее с положением изображения первого анаморфного элемента (см.рис.2). Это устранение осевого астигматизма представляет собой ключевое требование для допустимых анаморфных конфигураций первого порядка (VFO), как описано в разд. 3.1. Еще одним следствием ортогональных анаморфных элементов является то, что существует не более двух конъюгатов, для которых возможна стигматическая визуализация на оси. 13 Это накладывает ограничение на перефокусировку для разных расстояний до объекта и было причиной печально известной проблемы с ранними анаморфными кинообъективами, известной как «анаморфный свинка», где близкое положение фокусировки представляло значительный осевой астигматизм.Позднее эта проблема была решена Wallin 25 с использованием оригинального метода компенсации осевого астигматизма путем вращения двух цилиндрических элементов относительно друг друга.
Рис. 2
Наличие осевого астигматизма для анаморфной системы из-за смены конъюгатов. Одна система показана в ортогональных плоскостях симметрии x-z и y-z, где цилиндрические элементы обладают мощностью по одной оси и не обладают мощностью по другой. Стигматическая визуализация происходит только для одного конъюгата (зеленые лучи).Изменение сопряженного изображения (синий и красный лучи) вносит осевой астигматизм.
Zoom-системы также представляют дополнительные ограничения для проектов первого порядка. По определению, зум-объектив должен иметь непрерывно регулируемый EFL (или увеличение), а также сохранять фиксированное положение изображения. Последнее требование заключается в обеспечении того, чтобы объект оставался в фокусе при масштабировании. При механически скомпенсированном масштабировании, по крайней мере, две группы элементов должны перемещаться независимо, чтобы соответствовать этим требованиям: вариатор для изменения EFL и компенсатор для поддержания фиксированного положения изображения. 17 Дополнительные группы, как фиксированные, так и подвижные, часто используются для обеспечения дополнительной коррекции аберраций, механизма фокусировки и фиксированной общей длины дорожки (TTL), где TTL — это расстояние от первой вершины поверхности до изображения. Требование ко всем группам масштабирования состоит в том, чтобы их движения не «сбивались», то есть их положения не пересекались при масштабировании. Это потребовало бы, чтобы группы изменили порядок при масштабировании, что невозможно реализовать с помощью стандартной механики. Наконец, конфигурации масштабирования часто классифицируются по порядку их групп на основе знака их мощности: положительный (P), отрицательный (N) или минимально мощный (X).Например, NPX будет обозначать трехгрупповое масштабирование с отрицательной, положительной и минимальной группой в указанном порядке. Пространство дизайна с глобальным масштабированием состоит из всех возможных комбинаций знаков мощности в зависимости от количества групп.
Сосредоточившись теперь на дизайне комбинированного анаморфного масштабирования, Dodoc представил два типа конфигураций первого порядка, которые включают анаморфные компоненты в движущиеся группы масштабирования. 15 Оба типа могут соответствовать стандартным ограничениям масштабирования и ограничению поддержания постоянного анаморфного соотношения посредством масштабирования.Напомним, для бесконечной сопряженной анаморфной системы анаморфное соотношение определяется как отношение фокусных расстояний системы в ортогональных плоскостях симметрии x − z и y − z:
Конфигурация анаморфного масштабирования I типа [Рис. 3 (а)] состоит из шести групп масштабирования с использованием двух вариаторов и двух компенсаторов, всего четыре внутренних движущихся группы. При использовании цилиндрических элементов одна пара вариатор-компенсатор работает исключительно в плоскости x-z, а другая пара работает исключительно в плоскости y-z.Неподвижные передняя и задняя группы вращательно-симметричны и служат в обеих плоскостях симметрии как фокусная и ретрансляционная группы соответственно. Это означает, что разница в фокусных расстояниях системы в плоскостях x-z и y-z в соответствии с анаморфным соотношением полностью объясняется четырьмя анаморфными подвижными группами (двумя парами вариатор-компенсатор). Наконец, упор диафрагмы расположен после всех движущихся групп в группе реле, чтобы поддерживать постоянное диафрагменное число за счет увеличения с постоянным диаметром диафрагмы.Конфигурация типа I по существу представляет собой две независимые четырехгрупповые схемы масштабирования в ортогональных плоскостях, связанных анаморфным соотношением, и две общие стационарные группы. Как будет видно в разд. 3.1, два связанных четырехгрупповых зума являются основой для генерации решений первого порядка типа I.
Рис. 3
Конфигурации первого порядка типа I и типа II, представленные Dodoc 15 для комбинированных анаморфных схем увеличения. Оба типа конфигураций изображены с вырезами по ортогональным плоскостям симметрии.(а) Тип I использует две пары анаморфных вариатор-компенсатор, работающих в ортогональных плоскостях. (b) Тип II использует сферический вариатор, совместно используемый двумя анаморфными компенсаторами, ориентированными в ортогональных плоскостях. Оба типа имеют фиксированные фокусные и релейные группы спереди и сзади соответственно. Упор диафрагмы находится в группе реле.
Конфигурация анаморфного зума типа II [Рис. 3 (b)] состоит из пяти групп с одним сферическим вариатором и двумя цилиндрическими компенсаторами, ориентированными ортогонально по x и y, всего три внутренних движущихся группы.Как и в конфигурациях типа I, первая и задняя группы являются стационарными и используются как фокусирующая и ретрансляционная группы, соответственно, где анаморфное соотношение передается двумя цилиндрическими компенсаторами. Упор диафрагмы снова находится в группе реле. В отличие от типа I, есть три дополнительных ограничения на конфигурацию типа II из-за общего сферического вариатора. Эти ограничения предназначены для обеспечения постоянного анаморфного соотношения посредством масштабирования, как показано Dodoc. 15 Во-первых, в обеих ортогональных плоскостях симметрии маргинальный пучок лучей должен входить в конечную (ретрансляционную) группу коллимированной.Во-вторых, отношение фокусных расстояний цилиндрического компенсатора должно быть равно анаморфному соотношению системы. В-третьих, расстояние между цилиндрическими компенсаторами должно быть равно их разности фокусных расстояний. Эти дополнительные ограничения означают, что для генерации решений первого порядка типа II необходимо использовать модифицированное четырехгрупповое масштабирование, как это сделано в разд. 3.1.
Для каждого типа конфигурации пространство дизайна анаморфного масштабирования состоит из всех возможных комбинаций групповой мощности и порядка ориентации цилиндров (см. Таблицу 1).Например, на рис. 3 конфигурация типа I находится в пространстве решений PNNPPN-YXYX, поскольку порядок знаков мощности группы равен PNNPPN, а ориентация четырех цилиндрических движущихся групп — YXYX. В этом примере видно, что форма проекта — это PNPN как по x, так и по y, поэтому это пространство решений можно дополнительно обозначить как PNPN-YXYX. Точно так же конфигурация типа II на рис. 3 находится в пространстве решений PPNP-XY. Это всего лишь две из множества возможных комбинаций порядка мощности и цилиндров для обеих конфигураций.
Таблица 1
Количество пространств для решения анаморфного масштабирования для конфигураций первого порядка типа I и типа II. Общее количество пространств решений происходит из всех возможных порядков групповой мощности и ориентации цилиндров.