что лучше, что надежнее, плюсы и минусы, осообенности акпп
Все современные двигатели внутреннего сгорания недостаточно мощные и не приспособлены для значительных изменений нагрузок при прямом приводе. Для адаптации тягового усилия применяют коробки перемены передач, позволяющие изменить скорость вращения в нужном диапазоне. В настоящее время все больше автомобилей оснащаются автоматической трансмиссией, и если различия между механикой и автоматом всем ясны, то разница между автоматом и роботом многих ставит в тупик.
Отличия коробки-автомата от робота
Принципиальные отличия АКПП от роботизированной заключаются в следующих конструктивных особенностях:
- Главная разница состоит в конструкции сцепления: автомат использует гидротрансформатор, а робот сухое фрикционное сцепление с одним или двумя дисками.
- В автоматах применяются планетарные редукторы со сложным функционированием и управлением, выбор передаточного отношения определяет блок управления.
 В роботе, подобно механической коробке, шестерни постоянно находится в зацеплении, и включаются специальными муфтами, используя синхронизаторы для выравнивания угловых скоростей.
В роботе, подобно механической коробке, шестерни постоянно находится в зацеплении, и включаются специальными муфтами, используя синхронизаторы для выравнивания угловых скоростей. - Показатель экономичности у робота значительно выше, так как гидротрансформатор имеет более высокие механические потери чем сухое сцепление.
- У автомата выше плавность движения и более высокий комфорт езды, но трансмиссия слишком дорога в ремонте, который может производиться только обученными специалистами в сервисном центре. Ремонт роботизированной коробки по стоимости и сложности сравним с механической.
Особенности и принцип действия коробки-автомата
Главная особенность автоматической коробки передач – это наличие гидротрансформатора, выполняющего функцию плавного переключения скоростей, за которые отвечает редуктор. Если провести аналогию с механической коробкой, то гидротрансформатор выполняет действия, сходные с выжимом сцепления, обеспечивая плавность переключения передаточных чисел.
Принцип работы АКПП следующий:
- Двигатель крутит маховик с жестко закрепленной на нем ведущей турбиной, она двигает жидкость в картере, приводя в действие ведомую. Между ними нет механической связи, что позволяет им вращаться с разной частотой. При большой частоте вращения гидротрансформатор остается блокированным для экономии энергии.
- Усилие передается на первичный вал коробки, где при помощи шестеренок изменяются передаточные числа. Муфты задействуют нужные секции, обеспечивая оптимальную работу двигателя. Ударные нагрузки и рывки компенсируют обгонные муфты, проскальзывающие на обратном ходу.
- Управление фрикционами выполняется гидравлической системой. Гидропривод сжимает определенные фрикционы, приводя в действие соединенные с ним шестеренки.
- Давление масла обеспечивается специальным гидронасосом. Управление гидроприводами осуществляют золотники, которые перемещают соленоиды.

Преимущества и недостатки коробки-автомата
Автоматическая коробка передач в силу конструктивных особенностей имеет определенные преимущества:
- Обеспечение легкого управления автомобилем без необходимости выжима сцепления, переключения передач, и процедуры плавного начала движения. Это обеспечивается автоматикой, позволяя водителю сосредоточиться на дороге.
- Гидротрансформатор невозможно быстро вывести из строя в силу неопытности водителя, как это может произойти со сцеплением на механической коробке.
- Автомат не создает сильных нагрузок на двигатель, как при механике. Передаточные числа меняются без лишнего увеличения оборотов, тем самым продлевается ресурс двигателя.
- При использовании гидротрансформатора нагрузка на ходовую часть ниже в сравнении с другими видами трансмиссий.
- Наличие пассивной системы безопасности, при которой стоящий на уклоне автомобиль не может покатиться.
- У автоматической шестиступенчатой коробки расход топлива ниже.

Автоматическая трансмиссия имеет следующие слабые стороны:
- В сравнении с механической или роботизированной коробкой отсутствует высокая динамика разгона.
- Значительный расход топлива, особенно на четырехступенчатой коробке.
- Сниженный КПД из-за значительных потерь мощности, уходящих на работу гидротрансформатора.
- Дороговизна агрегата и его обслуживания, что отрицательно сказывается на стоимости всего автомобиля.
- Возможное откатывание назад при начале движения с места на уклоне.
- Коробка автомат пинается при неправильной эксплуатации.
Особенности и принцип действия роботизированной коробки
Роботизированная коробка передач (робот), устанавливаемая на обыкновенные автомобили, представляет собой механическую коробку с автоматическим (электрическим или гидравлическим) управлением. Переключение скоростей в таком устройстве происходит при помощи автоматики. В автомобиле нет традиционной педали сцепления, так как оно выключается автоматически в момент переключения передач.
Алгоритм работы коробки следующий: после запуска двигателя при выжатом тормозе селектор переводится в нужное положение. Привод на сцеплении разъединяет трансмиссию, а механизм коробки включает нужную передачу. Водитель бросает педаль тормоза и плавно давит на педаль акселератора, автомобиль трогается, и дальнейшие переключения производятся автоматически. Управление коробкой осуществляет процессор согласно выбранному алгоритму. Водитель может вмешиваться в работу коробки.
Благодаря двойному сцеплению скорость переключения передаточных чисел максимальна, что очень важно для спортивных гонок.
Преимущества и недостатки роботизированной коробки
В сравнении с автоматом, роботизированная КПП имеет меньше преимуществ в силу того, что система еще достаточно сырая и не доведена до совершенства. Сильные стороны робота проявляются в следующем:
- Более высокая экономия топлива в сравнении с автоматическими трансмиссиями.

- Высокая надежность механизма редуктора.
- Робот более дешев в производстве и обслуживании, потребляет меньше масла (в среднем вдвое), чем автомат.
- Двукратное повышение ресурса сцепления в сравнении с механической коробкой.
- Меньший вес коробки в сравнении с автоматической, ее высокая ремонтопригодность.
- Более высокая динамика, возможность ручного переключения скоростей на полуавтоматическом режиме, что важно на бездорожье, подъеме, или в пробке.
Слабые стороны роботизированной коробки передач:
- При переключении передач возможны рывки.
- Заметная задержка между включением передачи и началом ее использования.
- В отличие от автомата, при остановке автомобиля необходимо переключение рычага в нейтральное положение.
- Каждая пробуксовка во время движения усиленно расходует ресурс коробки. Эксплуатация автомобилей с таким видом трансмиссии желательна только на твердом покрытии.
- При начале движения происходит откат.

Чем автоматическая коробка передач отличается от робота и вариатора? | Вечные вопросы | Вопрос-Ответ
Большинство легковых автомобилей оборудованы автоматической коробкой передач, некоторые дорогостоящие авто вместо АКПП имеют вариатор или роботизированную коробку передач. Все эти устройства относятся к автоматическим коробкам переключения передач, но при этом имеют разное строение и принцип работы.
Чем отличается вариатор от автомата?
Долгое время автоматы были четырёхступенчатыми. В последние годы на автомобили стали устанавливать семи- и восьмиступенчатые коробки.
В составе автомата находятся два основных узла — гидротрансформатор и редуктор. Первый позволяет плавно переключать передачи, а второй представляет собой механизм, шестеренки которого позволяют менять передаточное число. Смену передачи обеспечивает тормозная лента, она блокирует определенные шестерни редуктора.
В вариаторе такого физического переключения передач нет.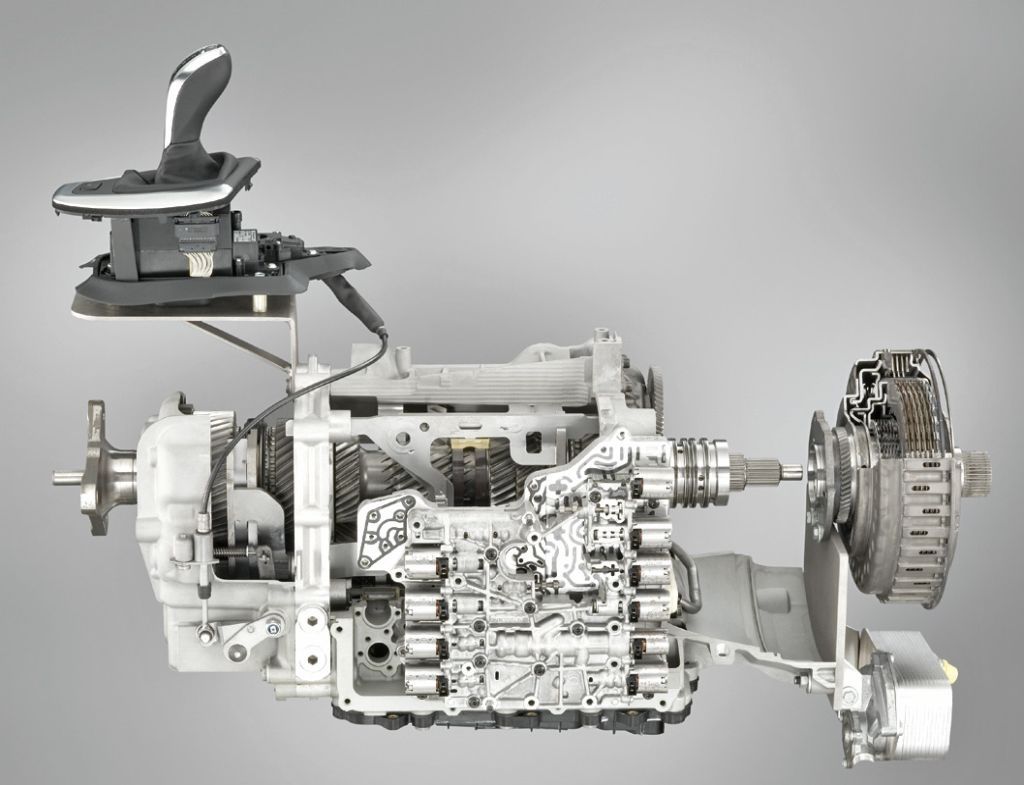 Данный механизм имеет два шкива (ведомый и ведущий), которые находятся один против другого и связаны между собой металлическим ремнём. Смена передачи в вариаторе происходит за счет сдвижения и раздвижения шкивов. Когда шкив максимально раздвинут, то это соответствует первой передаче. При сдвинутом шкиве ремень проходит по большему диаметру, что равносильно пятой или более высокой передаче.
Данный механизм имеет два шкива (ведомый и ведущий), которые находятся один против другого и связаны между собой металлическим ремнём. Смена передачи в вариаторе происходит за счет сдвижения и раздвижения шкивов. Когда шкив максимально раздвинут, то это соответствует первой передаче. При сдвинутом шкиве ремень проходит по большему диаметру, что равносильно пятой или более высокой передаче.
Чем отличается робот от автомата?
Роботизированная трансмиссия — это та же «механика», но переключением скоростей в ней занимается блок управления с определенным алгоритмом. В основу ее конструкции положена механическая коробка передач. Работа роботизированной коробки передач может осуществляться в двух режимах: автоматическом и полуавтоматическом. На всех роботизированных коробках предусмотрен режим ручного (полуавтоматического) переключения передач, аналогичный функции Tiptronic АКПП.
Какие плюсы и минусы есть автомата, вариатора и робота?
Автоматическая коробка передач позволяет водителю комфортно ездить по городу и не думать каждый раз о переключении передач. АКПП обеспечивает достаточно плавное переключение передач и высокую надёжность по сравнению с другими трансмиссиями. Ресурс автомата — в среднем 150–200 тысяч километров. Расход топлива у АКПП больше, чем у вариатора.
АКПП обеспечивает достаточно плавное переключение передач и высокую надёжность по сравнению с другими трансмиссиями. Ресурс автомата — в среднем 150–200 тысяч километров. Расход топлива у АКПП больше, чем у вариатора.
Большим плюсом вариатора является его особенная конструкция, которая позволяет автомобилю непрерывно передавать крутящий момент на колёса, а потому предельно плавно набирать скорость. Благодаря этому мотор работает в экономичном режиме, без излишних нагрузок. Также с вариатором автомобиль быстрее разгоняется. Среди других плюсов машин с вариатором можно назвать экономию топлива. Но при этом такие автомобили достаточно капризны. Их нельзя перегревать и перегружать высокой мощностью, они не работают на пиковых нагрузках и не выносят долгой пробуксовки в снегу или грязи. Срок службы вариатора — примерно 150 тысяч километров.
Преимуществом роботизированной трансмиссии является ее невысокая стоимость и низкий расход топлива, но в пробках такую коробку лучше переводить в нейтральное положение, чтобы избежать перегрева сцепления.
Смотрите также:
в чем разница, какая лучше
Современные автомобили отличаются многообразием. Это касается и их КПП. Покупая автомобиль, всем и всегда хочется заполучить вариант с надежным механизмом управления. Поэтому приходится выбирать: купить автомат или вариатор, а, может, вовсе приобрести «умную» коробку робот. Какая коробка переключения передач лучше и почему? В чем состоят их различия?
Что такое АКПП
Один из наиболее распространенных вариантов — автоматическая коробка передач. В автомобилях с передним приводом присутствует главная передача и дифференциал.
Коробка автомат имеет 5 режимов:
- парковка;
- задний ход;
- нейтральный режим;
- спортивный режим;
- режим автоматического переключения.
Автоматизированная коробка передач
Преимущества автоматики:
- плавность движения;
- отсутствие необходимости ручного переключения;
- надежность.

Недостатки автоматической коробки:
- относительно сложная и дорогая в обслуживании;
- сложна в управлении при плохих погодных условиях;
- имеет значительный расход топлива.
Роботизированная КПП
Роботизированная КПП – это устройство, которое принимает, передает на ведущие колеса крутящий момент, предварительно его преобразуя. Всем процессом в подобном устройстве управляет автоматика.
РКПП
Однако, это не делает ее вариантом АКПП. Единственное сходство – присутствующая в корпусе коробка сцепления. КПП робот схожа с механической коробкой, которая управляется посредством автоматизированной системы.
Чем отличается робот от автомата
И коробка робот и коробка автомат активно используются, тогда в чем заключается их разница?
Различия роботизированной коробки от автоматической состоят, главным образом, в том, что первая не способна столь же плавно переключать скорости.
В итоге – машина делает рывки во время переключения.
При переходе на другую скорость, КПП роботизированную сначала необходимо поставить в нейтральное положение. Поэтому есть определенные заминки во времени. Да и в отношении надежности они значительно уступают автоматическим. В этом заключается главное отличие коробки автомата от коробки робота. И если приходится выбирать: что лучше — робот или автомат, то по этому параметру, определенно, лучше автомат.
Робот от автомата отличается по своему виду. Если на селекторе имеется значок Р, это будет значить, что перед покупателем автоматическая коробка, N и R укажут на роботизированную.
Роботизированная коробка передач или АКПП
Что лучше – робот или коробка автомат? Кроме всего прочего, робот от автомата еще и тем отличается, что первый вариант будет стоить дешевле. От роботизированной АКПП также будет отличать и тем, что коробка автомат характеризуется определенной сложностью в обслуживании.
КПП робот от автоматической коробки передач можно отличить внешне: по своей массе робот меньше, может иметь систему управления на руле автомобиля.
Роботизированная система, несомненно, имеет свои плюсы. И, все же, если выбирать, автомат или робот, то, наверное, стоит выбрать коробку с автоматом.
Вариаторная КПП
Вариатор применяется в механизмах, где нужно плавное переключение скорости. Он является разновидностью автоматических коробок передач.
Вариаторная коробка передач
Основное, чем отличается вариатор от роботизированной коробки, это то, что изменение передаточных отношений при переключении здесь происходит автоматически, без применения физических усилий.
Робот или вариатор
И вариатор, и робот активно используются в управлении автомобилем. Но коробки робот и вариатор значительно отличаются друг от друга. У каждого из них есть свои плюсы и минусы.
У каждого из них есть свои плюсы и минусы.
Основные отличия вариатора от робота состоят в том, что:
- для вариатора свойственны плавность движения, чего не хватает роботу;
- вариатору характерно быстрое переключение передач;
- экономное использование топлива, чем отличается робот от вариатора;
- если сравнивать с вариаторами робот, то вариаторы более надежны, практически исключаются ситуации с «заклиниванием» при переключении передач;
- стоимость КПП вариатора будет гораздо выше, да и в обслуживании она не из дешевых.
Чем отличается вариатор от автоматики
Отличия вариатора от автоматики состоят в том, что:
- вариатор лучше разгоняется, имеет маленький расход топлива;
- плавно переключает передачи, нет рывков, характерных для автоматики;
- стоит дороже в обслуживании и ремонте.

Таким образом, любителям быстрой езды стоит задуматься, что выбрать: вариатор или автомат. Вариатор для этого подойдет лучше.
Все КПП хороши, в той или иной степени. Здесь главная задача – учитывать для какой езды и в каких условиях их использовать. Так, в городе вполне рационально использование роботизированной коробки. Она более схожа с механической по принципу переключения передач, что рационально в условиях городских дорог (многочисленные пробки, частое переключение передач). Любители быстрой езды оценят коробку-вариатор. Те, кто ценит комфорт, будут рады автоматике.
Коробка «робот» и «автомат» в чем разница?
Начиная с конца 80-х годов прошлого века, инженеры стремятся максимально нивелировать разницу между автоматическими и механическими трансмиссиями.
Одним из результатов такой работы стало появление роботизированной «механики», которая на сегодняшний день присутствует в модельных линейках почти всех крупных автопроизводителей.
Какими же преимуществами и недостатками обладает такой «робот» в сравнении с классическим «автоматом»?
Недостатки и особенности робота
Начнем с конструктивных особенностей «робота», который по сути является механической коробкой передач, но без третьей педали. За выжим сцепления в такой КП отвечает электропривод (актуатор).
В отличие от автоматической коробки с гидротрансформатором, конструкция роботизированной «механики» значительно проще, поэтому и дешевле в производстве. Последнее преимущество сыграло главную роль в быстром появлении «роботов» на многих недорогих моделях.
Актуальные Автоновости
Потерян номер от машины: что делать?Штраф за нечитаемые номера в 2018Нанопленка на номера: отзывы, законность и наказаниеНо как оказалось, производители немного поспешили с массовым запуском такой трансмиссии на рынок. Все дело в том, что большинство «роботов», особенно при активной езде, не обеспечивали плавного переключения передач, раздражая водителей рывками и задержками при смене ступеней, а также откатом при старте на подъеме. Кроме того, роботизированные КП не могли похвастаться высокой надежностью.
Роботизированная коробка передач с двойным сцеплением
Улучшить плавность «роботов» взялся концерн Volkswagen, внедрив на своих моделях в середине 2000-х годов преселективный «робот» с двумя сцеплениями (DSG). В таких трансмиссиях четные и нечетные передачи, расположены на отдельных валах, оснащенных индивидуальными сцеплениями.
Новый тип КП хоть и стал совсем недешевым в производстве, но избавился от медлительности первых «роботов» и даже смог обеспечить автомобилю динамику разгона лучше, чем у версий с обычной «механикой». В дальнейшем многие ведущие автопроизводители также начали переходить на подобные “автоматы”, заказывая их у ведущих производителей трансмиссий.
Впрочем, в некоторых случаях остались вопросы к надежности отдельных КП данного типа. Но в сравнении с прежним «роботом» плавность и скорость переключений выросла просто несравнимо.
В подтверждение этого превосходства отметим, что в настоящий момент большинство брендов уже отказались от применения «роботов» на базе классических механических КП и в ближайшем будущем такая трансмиссия может уйти в историю.
Помимо «скорострельности», современные роботизированные КП превосходят классические «автоматы» и по экономичности. «Роботы» вполне способны помогать двигателю расходовать топливо на уровне версий с «механикой».
Актуальные Автоновости
Классический автомат
Казалось бы, будущее «гидротрансформаторных автоматов» предрешено, тем не менее, «старая гвардия» не спешит сдавать свои позиции.
Во-первых, развитие таких трансмиссий также не стоит на месте. Хотя у многих автолюбителей «классическая» АКП ассоциируется с морально устаревшими четырехступенчатыми «автоматами», которые не спешат переключать скорости и не особо заботятся об экономии топлива.
На самом деле такие коробки передач встречаются сейчас только на бюджетных моделях, да и то довольно редко. Подавляющая часть «автоматов» сегодня имеют минимум шесть скоростей и предлагают функцию ручной смены передач.
Более такого, производители активно увеличивают количество ступеней в таких КП, чтобы добиться лучшей экономичности. На автомобилях стоимостью выше среднего все чаще появляются восьми- и даже девятидиапазонные трансмиссии, а некоторые бренды, например Ford, уже завлекают клиентов «автоматами» на 10 (!) ступеней.
На автомобилях стоимостью выше среднего все чаще появляются восьми- и даже девятидиапазонные трансмиссии, а некоторые бренды, например Ford, уже завлекают клиентов «автоматами» на 10 (!) ступеней.
Большинство «роботов» не могут справиться с большим крутящим моментом мощных двигателей. Конечно, можно привести пример нескольких суперкаров с роботизированными КП, включая 1000-сильный Bugatti Veyron, но это скорее исключения, подтверждающие правило, тем более, что владельцы спортивных авто не особо беспокоятся о длительности ресурса таких КП.
Также роботизированными трансмиссиями не оснащаются полноценные внедорожники, потому что на сроке службе «роботов» негативно сказываются продолжительные пробуксовки на бездорожье и рывки из-за изменения сцепных свойств при контакте четырех колес с дорогой. Все это по большому счету не очень полезно и для обычных АКП.
Автомат или робот
Разница между «классическим автоматом» и «роботизированной» механикой с каждым годом уменьшается. Если «роботы» сохранят темпы “самосовершенствования”, подтянув надежность и выносливость, то «гидротрансформаторам» придется серьезно потесниться.
Если «роботы» сохранят темпы “самосовершенствования”, подтянув надежность и выносливость, то «гидротрансформаторам» придется серьезно потесниться.
робот | Определение, история, использование, типы и факты
Робот , любая машина с автоматическим приводом, заменяющая человеческие усилия, хотя она может не напоминать людей по внешнему виду или выполнять функции, подобные человеческим. В более широком смысле, робототехника — это инженерная дисциплина, связанная с проектированием, конструированием и эксплуатацией роботов.
робот-гуманоидASIMO, двуногий робот-гуманоид, разработанный компанией Honda Motor Co.
American Honda Motor Co., Inc.Британская викторина
Гаджеты и технологии: факт или вымысел?
Виртуальная реальность используется только в игрушках? Использовались ли когда-нибудь роботы в бою? В этой викторине вы узнаете о гаджетах и технологиях — от компьютерных клавиатур до флэш-памяти.![]()
Концепция искусственных людей возникла еще до письменной истории ( см. Автомат ), но современный термин робот происходит от чешского слова robota («принудительный труд» или «крепостной»), использованного в пьесе Карела Чапека R.U.R. (1920). Роботы в пьесе были изготовлены людьми, бездушно эксплуатировавшимися владельцами фабрик, пока не восстали и в конечном итоге не уничтожили человечество. Были ли они биологическими, как монстр в книге Мэри Шелли Frankenstein (1818), или механическими, не уточнялось, но механическая альтернатива вдохновляла поколения изобретателей на создание электрических гуманоидов.
Альфред Абель, Бриджит Хельм и Рудольф Кляйн-Рогге в Метрополис(Слева направо) Альфред Абель, Брижит Хельм и Рудольф Кляйн-Рогге в Метрополис , режиссер Фриц Ланг, 1927.
Из частной коллекции Слово робототехника впервые появилось в научно-фантастическом рассказе Айзека Азимова « Runaround » (1942). Наряду с более поздними рассказами Азимова о роботах, он установил новый стандарт достоверности в отношении вероятных трудностей разработки интеллектуальных роботов и технических и социальных проблем, которые могут возникнуть. Обход также содержал знаменитые «Три закона робототехники» Азимова:
Наряду с более поздними рассказами Азимова о роботах, он установил новый стандарт достоверности в отношении вероятных трудностей разработки интеллектуальных роботов и технических и социальных проблем, которые могут возникнуть. Обход также содержал знаменитые «Три закона робототехники» Азимова:
- 1. Робот не может причинить вред человеку или своим бездействием позволить человеку причинить вред.
2. Робот должен подчиняться приказам людей, за исключением случаев, когда такие приказы противоречат Первому закону.
3. Робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому или Второму закону.
В статье прослеживается развитие роботов и робототехники. Для получения дополнительной информации о промышленных приложениях, см. статьи автоматизации.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.Подпишитесь сейчас Узнайте, как мехатроника помогает инженерам создавать высокотехнологичные продукты, такие как промышленные роботы.
Узнайте, как мехатроника сочетает в себе знания и навыки машиностроения, электротехники и вычислительной техники для создания высокотехнологичных продуктов, например промышленных роботов.
© Университет Ньюкасла, факультет инженерии и искусственной среды с благодарностью Джереми Лей и Нику Паркеру из Light Creative (издательский партнер Britannica) См. Все видеоролики к этой статье Хотя и не гуманоид по форме, машины с гибким поведением Для промышленности было разработано несколько человекоподобных физических атрибутов.Первым стационарным промышленным роботом был программируемый Unimate, гидравлический тяжеловесный манипулятор с электронным управлением, который мог повторять произвольные последовательности движений. Он был изобретен в 1954 году американским инженером Джорджем Деволом и разработан компанией Unimation Inc., основанной в 1956 году американским инженером Джозефом Энгельбергером. В 1959 году прототип Unimate был представлен на литейном заводе General Motors Corporation в Трентоне, штат Нью-Джерси. В 1961 году Condec Corp. (после покупки Unimation в предыдущем году) поставила на завод GM первого в мире производственного робота; у него была неприятная задача (для людей) извлекать и складывать горячие металлические детали из машины для литья под давлением.Оружие Unimate по-прежнему разрабатывается и продается лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
В 1961 году Condec Corp. (после покупки Unimation в предыдущем году) поставила на завод GM первого в мире производственного робота; у него была неприятная задача (для людей) извлекать и складывать горячие металлические детали из машины для литья под давлением.Оружие Unimate по-прежнему разрабатывается и продается лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
Промышленный робот на заводе.
© Index Open Посмотрите, как использование роботизированного конвейера для бактериальной генетики делает работу ученых менее сложной и более эффективной по времени в Университетском колледже Корка«Роботизированный конвейер», используемый в бактериальной генетике в Университетском колледже Корка, Корк , Ирландия.
Университетский колледж Корк, Ирландия (издательский партнер Britannica) См. Все видеоролики к этой статье Более совершенные электрические руки с компьютерным управлением, управляемые датчиками, были разработаны в конце 1960-х и 1970-х годах в Массачусетском технологическом институте (MIT) и Стэнфордский университет, где они использовались с камерами в роботизированных исследованиях рук и глаз. Виктор Шейнман из Стэнфорда, работавший с Unimation для GM, разработал первый такой рычаг, используемый в промышленности. Названные PUMA (Программируемая универсальная машина для сборки), они используются с 1978 года для сборки таких автомобильных компонентов, как панели приборов и фары.PUMA широко подражали, и ее потомки, большие и малые, до сих пор используются для легкой сборки в электронике и других отраслях промышленности. С 1990-х годов стрелковое электрическое оружие стало важным в лабораториях молекулярной биологии, точно обрабатывая массивы пробирок и пипетируя сложные последовательности реагентов.
Виктор Шейнман из Стэнфорда, работавший с Unimation для GM, разработал первый такой рычаг, используемый в промышленности. Названные PUMA (Программируемая универсальная машина для сборки), они используются с 1978 года для сборки таких автомобильных компонентов, как панели приборов и фары.PUMA широко подражали, и ее потомки, большие и малые, до сих пор используются для легкой сборки в электронике и других отраслях промышленности. С 1990-х годов стрелковое электрическое оружие стало важным в лабораториях молекулярной биологии, точно обрабатывая массивы пробирок и пипетируя сложные последовательности реагентов.
Мобильные промышленные роботы также впервые появились в 1954 году. В том же году электрическая тележка без водителя, произведенная Barrett Electronics Corporation, начала возить грузы по продуктовому складу в Южной Каролине.Такие машины, получившие название AGV (Автомобили с автоматическим управлением), обычно перемещаются по сигнальным проводам, закрепленным в бетонных полах. В 1980-х годах AGV приобрели микропроцессорные контроллеры, которые позволяли выполнять более сложные действия, чем те, которые обеспечивались простым электронным управлением. В 1990-х годах новый метод навигации стал популярным для использования на складах: AGV, оснащенные сканирующим лазером, определяют свое местоположение путем измерения отражений от фиксированных светоотражателей (по крайней мере три из которых должны быть видны из любого места).
В 1980-х годах AGV приобрели микропроцессорные контроллеры, которые позволяли выполнять более сложные действия, чем те, которые обеспечивались простым электронным управлением. В 1990-х годах новый метод навигации стал популярным для использования на складах: AGV, оснащенные сканирующим лазером, определяют свое местоположение путем измерения отражений от фиксированных светоотражателей (по крайней мере три из которых должны быть видны из любого места).
Хотя промышленные роботы впервые появились в Соединенных Штатах, бизнес там не процветал. Unimation была приобретена Westinghouse Electric Corporation в 1983 году и закрыта несколько лет спустя. Cincinnati Milacron, Inc., другой крупный американский производитель гидравлического оружия, в 1990 году продала свое подразделение робототехники шведской фирме Asea Brown Boveri Ltd. Adept Technology, Inc., выделившейся из Стэнфорда и Unimation для производства электрического оружия, является единственная оставшаяся американская фирма. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, а в 1980-х годах другие компании в Японии и Европе начали активно выходить на рынок. Перспектива старения населения и связанная с этим нехватка рабочих побудила японских производителей экспериментировать с передовой автоматизацией еще до того, как она дала явную отдачу, открыв рынок для производителей роботов. К концу 1980-х Япония, возглавляемая робототехническими подразделениями Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокие затраты на рабочую силу в Европе также стимулировали внедрение роботов-заменителей: количество промышленных роботов в Европейском союзе впервые превысило количество установленных в Японии в 2001 году.
Отсутствие надежной функциональности ограничило рынок промышленных и сервисных роботов (созданных для работы в офисных и домашних условиях). С другой стороны, игрушечные роботы могут развлекаться, не выполняя задачи очень надежно, а механические разновидности существовали тысячи лет. ( См. Автомат ). В 1980-х годах появились игрушки с микропроцессорным управлением, которые могли говорить или двигаться в ответ на звуки или свет. Более продвинутые в 1990-х распознали голоса и слова.В 1999 году корпорация Sony представила собачьего робота по имени AIBO с двумя дюжинами двигателей для активации его ног, головы и хвоста, двумя микрофонами и цветной камерой, все они координируются мощным микропроцессором. Более реалистичные, чем что-либо прежде, AIBO гнались за цветными шарами и научились узнавать своих владельцев, исследовать и адаптироваться. Хотя первые AIBO стоили 2500 долларов, первые 5000 билетов были распроданы через Интернет.
В 1980-х годах появились игрушки с микропроцессорным управлением, которые могли говорить или двигаться в ответ на звуки или свет. Более продвинутые в 1990-х распознали голоса и слова.В 1999 году корпорация Sony представила собачьего робота по имени AIBO с двумя дюжинами двигателей для активации его ног, головы и хвоста, двумя микрофонами и цветной камерой, все они координируются мощным микропроцессором. Более реалистичные, чем что-либо прежде, AIBO гнались за цветными шарами и научились узнавать своих владельцев, исследовать и адаптироваться. Хотя первые AIBO стоили 2500 долларов, первые 5000 билетов были распроданы через Интернет.
развлекательный робот AIBO, модель ERS-111.
Предоставлено Sony Electronics Inc.Elektronik Malzeme Marketi Online Satış
садсад Икс
asdasd
Menüyü Kapat
Категория
- Анасайфа
- 3D
- 3D Yazıcı
- 3D Тарайыджы
- 3D Yazıcı Parçaları / Сделай сам
- 3D нить
- АБС-АБС +
- PLA-PLA +
- PETG
- Озель
- Tümünü Gör »
- 3D Калем Языджы
- Tümünü Gör »
- Арак — Гереч
- Исыла Даралан Макарон
- Bant
- Silikon Tabancası
- Кесме Маты
- Мальземе Кутусу
- Мухафаза Кутусу
- Эль Типи Куту
- Proje Kutusu
- Ардуино Кутулары
- Экран Черчевеси
- Tümünü Gör »
- Kablo ve Dönüştürücü
- JST
- Dönüştürücü
- Джемпер Кабло
- USB
- Крокодил
- HDMI
- Силикон Кабло
- Зил Тели — Монтаж Каблосу
- Родился Кабло
- Сери Порт
- Tümünü Gör »
- Ян Кески / Кабло Союджу
- Каргабурун / Pense
- Джымбиз / Торнавида
- Бюйютеч / Тутачак
- Кешичи / Деличи
- Антистатик
- Диер
- Кыртасие
- Tümünü Gör »
- Ардуино
- Arduino Modelleri
- Клон Ардуино
- Ориджинал Ардуино
- Arduino Tabanlı Geliştirme Kartları
- Tümünü Gör »
- Ардуино щит
- Ардуино Сетлери
- Arduino Sensör / Modül
- Tümünü Gör »
- Arduino Modelleri
- Ocuklar İçin
- Окул Ёнчези (4-7 Яш)
- İlkokul (7-10 Yaş)
- Ортаокуль (10-14 Яш)
- Lise ve Üstü (14+ лет)
- Tümünü Gör »
- Дрон
- Мультикоптер / Дрон
- Дрон Parçaları / Сделай сам
- FPV / Telemetri Modülleri
- Дрон Motorları
- Uçuş Kontrol Kartları
- Перванелер
- Gövdeler
- Аксесуарлар
- Fırçasız Motor Sürücüler (ESC)
- Tümünü Gör »
- Konnektör
- Серво Узатма Каблосу
- 2.
 4 ГГц Куманда
4 ГГц Куманда - Tümünü Gör »
- Eğitici Setler
- Ардуино Сетлери
- Малиновый пи сетлери
- Робот Китлери
- Tekerlekli ve Paletli Robotlar
- Роботик Коль / Комплект
- Солнечный комплект
- Tümünü Gör »
- Makeblock
- Робот Сетлери
- Elektronik Modüller
- Mekanik Parçalar
- Tümünü Gör »
- Кендин Яп Китлери
- STEM DIY Kitleri
- Сделай сам Сетлери
- Илеткен Калем
- Tümünü Gör »
- Роботистан Сетлери
- Роботистан Озель Сетлер
- Комбин Сетлер
- Tümünü Gör »
- BBC Micro: Бит
- BBC Micro: Бит Китлери
- Elektronik Modüller
- Аксесуарлар
- Tümünü Gör »
- Kodlama Tasarım Beceri Atölyeleri
- Окул Öncesi Deney Setleri
- Grove Modül ve Setler
- DFRobot
- Elektronik Modüller
- DFRobot Kitleri
- Tümünü Gör »
- Маленькие кусочки
- КОНСТРУКТОР ЛЕГО
- Eğitici Setler
- Аксесуарлар
- Tümünü Gör »
- Kodlama — Интернет Eğitimler
- Макей
- Tinylab Eğitim Setleri
- MakeX Yarışma Setleri
- Окул Эгитим Сетлери
- Tümünü Gör »
- Электроник Карт
- Адресленебилир LED (NeoPixel)
- Motor Sürücü Kartı
- Двигатель постоянного тока Sürücü
- Шаговый двигатель Sürücü
- Сервомотор Sürücü
- Tümünü Gör »
- Voltaj Regülatör Kartı
- Юксельтици
- Düşürücü
- Диджер Регюлатёрлер
- Tümünü Gör »
- Röle / MOSFET Kartları
- Sıralı Röle Kartları
- Сычаклык, Ишик, Заман Аярлы Рёле Картлары
- Wi-Fi Kontrollü Röle Kartları
- MOSFET Kartları
- Tümünü Gör »
- Dönüştürücü
- Haberleşme Protokolü Dönüştürücüler
- SMD-DIP Dönüştürücüler
- Tümünü Gör »
- Programlayıcı
- Modüller
- Ses Modülleri
- Туш Такымлары
- RTC Modülleri
- Светодиод Sürücü ve Modülleri
- Haberleşme Modülleri
- ADC ve ıkış oklayıcı Modüller
- Дигер Модуллер
- Tümünü Gör »
- LabVIEW Veri Toplama Kartları
- Экран
- Tümünü Gör »
- Geliştirme Kartı
- Тинилаб
- ЛаттеПанда
- Intel Эдисон / Галилео
- Эдисон / Галилео Картлари
- Аксесуарлар
- Tümünü Gör »
- БигльДоска
- Рука ST / STM Geliştirme Kartı
- Совет Freescale Freedom
- Частица (Искра)
- FPGA
- Апельсин Пи
- Апельсин Пи Картлары
- Аксесуар
- Мухафаза Кутулары
- Eklenti Kartı
- Tümünü Gör »
- Роботик Картлар
- Dier Kartlar
- Tümünü Gör »
- Гийилебилир
- Dikilebilir Geliştirme
- Akıllı Saat
- EL провод
- Санал Герчеклик
- Производитель Бутик
- Tümünü Gör »
- Гуч Кайнаги — Батарья
- Li-Po, Li-ion Pil
- 1С 3.
 7 В Li-Po
7 В Li-Po - 2S 7,4 В Li-Po
- 3S 11,1 В Li-Po
- 4S 14,8 В Li-Po
- 5S 18,5 В Li-Po
- 6S 22,2 В Li-Po
- 18650 литий-ионный аккумулятор
- Airsoft Pilleri (Li-Po / Li-Fe)
- Ли-По Пил Аксесуары
- Ли-По Пиль Чардж Алети ве Деврелери
- Tümünü Gör »
- 1С 3.
- Pil
- Калем Пил / 9В
- Саат Пиллери
- Tümünü Gör »
- Adaptör — arj Aleti
- 5В
- 9В
- 10В
- 12 В
- 16В
- 24В
- Диер
- Tümünü Gör »
- Куру Акю
- Гуч Кайнаги
- Taşınabilir arj (Powerbank)
- Гюнеш Пили
- Батарья Аксесуарлары
- Пил Ювалары
- Конектёр / Кабло / Аксесуар
- Tümünü Gör »
- Tümünü Gör »
- Li-Po, Li-ion Pil
- Каблосуз Хаберлешме
- блютус
- вай-фай
- РФ
- RF Modül ve Ekipmanlar
- RFID / NFC Okuyucular ve Etiketler
- Tümünü Gör »
- GPS
- Xbee
- RF Modül
- Wi-Fi Modül
- Geliştirme Kartı
- Аксесуар
- Tümünü Gör »
- GSM
- Anten ve Konektör
- Антенлер
- Konektörler ve Dönüştürücüler
- Tümünü Gör »
- Tümünü Gör »
- Китап
- Ардуино
- Bilgisayar ve Programlama
- Электроник ве Роботик
- Тасарим
- Ocuklar için
- Диер Китаплар
- Интернет
- Tümünü Gör »
- Компонент
- Зуммер / Hoparlör
- Джойстик
- Mikrodenetleyici
- PIC Serisi Mikrodenetleyiciler
- Атмель Микроденетлейичилери
- Tümünü Gör »
- Entegre
- TTL CMOS Serisi (74, CD40, CD45)
- MAX Serisi Entegreler
- L / LM / LMD Serisi Entegreler
- TC / TL / TDA Serisi Entegreler
- UA / UC / ULN Serisi Entegreler
- DS Serisi Entegreler
- SG Serisi Entegreler
- EPROM и EEPROM Entegreleri
- Диер Энтегрелер
- Tümünü Gör »
- Voltaj Regülatörü
- LM Serisi
- 78 Сериси
- 79 Сериси
- AMS ve TL Serisi
- Tümünü Gör »
- Transistör
- БЦ Сериси
- BD Serisi
- BF ve BU Serisi
- BDX и BUX Serisi
- СОВЕТ Serisi
- 2N Serisi
- MJ ve MJW Serisi
- Tristör ve Triyak
- Tümünü Gör »
- Светодиод, ЖК-дисплей
- Светодиод
- ЖК
- 7-сегментный дисплей
- Матрица DOT
- Tümünü Gör »
- Direnç
- 1/4 Вт Direnç
- 5W Taş Direnç
- 25W Alüminyum Direnç
- 50 Вт Alüminyum Direnç
- 805 Kılıf SMD Direnç
- 1206 Kılıf SMD Direnç
- 1/2 Вт Direnç
- 1Вт Direnç
- 2W Direnç
- 3W Direnç
- Tümünü Gör »
- Кондансатор
- Серамик Кондансатор
- Полиэстер Кондансатор
- Электролит Кондансатор
- Süper kapasitörler
- Tümünü Gör »
- Diyot
- Видали Дийот
- Köprü Diyot
- Текли Дийот
- Dual Diyot
- Otki Diyot (Шоттки)
- 1N Serisi Direnç Tipi Diyot
- Бончук Дийот
- Варикап ве Хап Дийот
- SMD стабилитрон Diyot
- Tümünü Gör »
- Потансиометр
- Кадемели (Komütatör)
- Телли Метал
- Телли Пластик
- Пластик Сиях
- Металл Моно
- Кодировщик, Sonsuz Pot ve Bourns Pontasiyometre
- Potansiyometre Başlığı
- Tümünü Gör »
- Тримпот
- Роль
- 5V Röle
- 12 В рёле
- 24V Röle
- Дьер Рёлелер
- Tümünü Gör »
- Дип Сокет
- Кристаль Осилатор
- Klemens ve Konnektör
- Клеменс
- Konnektör
- Заголовок
- Tümünü Gör »
- Анахтар, Бутон, Переключатель
- DIP-переключатель
- On-Off Анахтар
- Переключить Анахтар
- Микросвич
- B
- Но на
- Tümünü Gör »
- Mosfet
- IGBT Mosfet
- IRFP Serisi
- IRFB Serisi
- IRF Serisi
- IRFU Serisi
- IRFZ Serisi
- BS, BTS, BUP и BUZ Serisi
- HUF Serisi
- SI, STP, STW и SPW Serisi
- Диер Мосфетлер
- Tümünü Gör »
- Sigorta
- Кондансатор Типли Силиндир Сигорта
- Диренч Типли Аксиел Сигорта
- SMD Sigorta
- Diyot Tipli Metal Termik Sigorta
- Kondansatör Tipli Plastik Silindir Termik Sigorta
- Transistör Tipli Termostat Sigorta
- Silindir Tipli Termostat Sigorta
- ГАЗ Аррастер Паратонер
- Порселен ве Серамик Сигорта
- Cam Sigorta
- Tümünü Gör »
- Варистёр, NTC и PTC
- Варистёр
- NTC
- PTC
- Tümünü Gör »
- Optokuplör
- 4N Serisi
- 6N Serisi
- CNY Serisi
- MOC Serisi
- TLP Serisi
- Diğer Optokuplörler
- Tümünü Gör »
- Пельтье
- Клавиатура (Tuş Takımı)
- Бобин
- CCFL
- Tümünü Gör »
- Mekanik
- Plastik Aralayıcı
- Металл Аралайджы
- Каплин
- Gövde
- Motor Tutucu
- Роботик Апарат
- Чивата / Сомун / Пул
- HUB / Motor Teker Bağlantı
- Кабло Ракору
- Sensör Tutucu
- Elektromıknatıs
- Tümünü Gör »
- Мотор
- Серводвигатель
- Сервопривод Motorlar
- Сервомотор Аксесуарлары
- Tümünü Gör »
- Шаговый двигатель
- Titreşim Motoru
- Fırçasız Motor
- Двигатель постоянного тока Redüktörlü
- 12 мм Микро / Мини Мотор
- 16мм мотор
- 25 мм мотор
- 30 мм мотор
- Мотор 35 мм
- 37 мм мотор
- 42 мм мотор
- L Redüktörlü
- Tümünü Gör »
- Redüktörsüz DC Motor
- Двигатель постоянного тока Yüksek Torklu
- Двигатель постоянного тока Yüksek Torklu 6В
- Двигатель постоянного тока Yüksek Torklu 12 В
- Двигатель постоянного тока Yüksek Torklu, 24 В
- Tümünü Gör »
- Поклонник
- Сивы / Хава Помпа
- Lineer Aktüatör
- Tümünü Gör »
- Серводвигатель
- Ölçü ve Test Aleti
- Мультиметр
- Осилоскоп
- Такометр
- Фонксийон Дженераторю
- Термометр
- Diğer Ölçü ve Test Aletleri
- Tümünü Gör »
- Прототиплем / Лехимлем
- Джемпер Кабло
- Макетная плата
- Деликли Пертинакс
- Bakır Plaket / PCB
- Havya / İstasyon
- Калем Хавья ве Уку
- Lehim İstasyonları
- Tümünü Gör »
- Лехим Экипмани
- Лехим Тели
- Лехим Сёкме
- Havya / Lehim Teli Standı
Перенаправление справки RoboDK
Указатель документации RoboDK:- ссылка на документацию RoboDK.
- Basic-Guide — Start (английский)
- Basic-Guide — Nav3D (English)
- Basic-Guide — GetStarted (английский)
- Basic-Guide — Toolbar (английский)
- Basic-Guide — Shortcuts (английский)
- Basic-Guide — RefFrames (английский)
- Basic-Guide — SetDefaults (английский)
- Basic-Guide — TroubleShootIssues (английский)
- Getting-Started — Station (английский)
- Getting-Started — NewRDK (английский)
- Начало работы — LoadRobot (английский)
- Начало работы — NewFrame (английский)
- Начало работы — LoadObject (английский)
- Начало работы — CreateTCP (английский)
- Начало работы — TCPrelative (английский)
- Начало работы — TCPgeometry (английский)
- Начало работы — CreateTarget (английский)
- Начало работы — ProgApproach (английский)
- Начало работы — TargetsSurface (английский)
- Начало работы — ProgRetract (английский) )
- Начало работы — ProgMain (английский)
- Начало работы — ExportProgram (английский)
- Начало работы — IntroMacros (английский)
- Интерфейс — интерфейс (английский)
- Интерфейс — RobotPanel (английский)
- Интерфейс — RobotTCP (английский)
- Интерфейс — RobotReference (английский)
- Интерфейс — RobotTarget (английский)
- Интерфейс — RobotConfig (английский)
- Интерфейс — ObjectSettings (английский)
- Интерфейс — MainMenu (английский)
- Интерфейс — MenuFile (Английский)
- Интерфейс — MenuEdit (английский)
- Интерфейс — MenuProgram (английский)
- Интерфейс — MenuView (английский)
- Интерфейс — MenuTools (английский)
- Интерфейс — MenuUtilities (Английский)
- Интерфейс — MenuConnect (английский) )
- Интерфейс — MenuHelp (English)
- Options-Menu — MenuOptions (English)
- Options-Menu — OptGeneral (English) 9005 0
- Меню опций — OptStation (английский)
- Меню опций — OptDisplay (английский)
- Меню опций — OptMotion (английский)
- Меню опций — OptCAD (английский)
- Меню опций — OptCAM (английский)
- Меню параметров — OptProgram (английский)
- Меню параметров — OptPython (английский)
- Параметры-меню — OptDrivers (английский)
- Параметры-меню — OptAccuracy (английский)
- Параметры-меню — OptOther (английский)
- Robot-Programs — RobotProgram (английский)
- Robot-Programs — OfflineProgramming (английский)
- Robot-Programs — NewProgram (английский)
- Robot-Programs — ProgInstructions (English)
- Robot-Programs — InsMoveJ (English)
- Robot-Programs — InsMoveL (английский)
- Robot-Programs — InsSetFrame (English)
- Robot-Programs — InsSetTCP (English)
- Robot-Programs — InsMoveC (English)
- Robot-Programs — InsSpeed (English)
- Robot-Programs — InsMessage (английский)
- Robot-Programs — InsPause (English)
- Robot-Programs — InsProgCall (English)
- Robot-Programs — InsIO (English)
- Robot-Programs — InsSmooth (English)
- Robot-Programs — InsSimulation (английский)
- Robot-Programs — SimulateProgram (английский)
- Robot-Programs — GenerateProgram (английский)
- Robot-Programs — TransferProgram (английский)
- Robot-Programs — SelectPostProcessor (английский)
- Robot-Programs — AutoProgramSplit (английский)
- Plugin-SolidWorks — PluginSolidWorks (английский)
- Plugin-SolidWorks — SolidWorksInstall (английский)
- Plugin-SolidWorks — SolidWorksToolbar (английский)
- Plugin-SolidWorks (английский) SWS
- Plugin-SolidWorks — SWPluginExamples (английский)
- Plugin-SolidWorks — SWWeldExample (английский)
- Plugin-SolidWorks — SWDispensingExample (английский) 9005 0
- Plugin-SolidWorks — SWExamplePropeller (английский)
- Plugin-SolidWorks — SWManualInstall (английский)
- Plugin-SolidEdge — PluginSolidEdge (английский)
- Plugin-SolidEdge — SEInstall (английский)
- Plugin-SolidEdge — SEToolbar (английский)
- Plugin-SolidEdge — SESettings (английский)
- Plugin-SolidEdge — SEPluginExamples (английский)
- Plugin-SolidEdge — SEExampleCarPolishing (английский)
- Plugin-SolidEdge — SEManualInstall (английский)
- Plugin-Mastercam — Mcam (английский)
- Plugin-Mastercam — McamIntro (английский)
- Plugin-Mastercam — McamPlugin (английский)
- Plugin-Mastercam — McamCommands (английский)
- Plugin-Mastercam — McamSetup (английский)
- Plugin-Mastercam — McamUpdate (английский)
- Plugin-Mastercam — McamGenerate (английский)
- Plugin-Mastercam — McamSettings (английский)
- Plugin-Mastercam — McamExamples (английский) 900 49 Plugin-Mastercam — McamExample3x (английский)
- Plugin-Mastercam — McamExample5x (английский)
- Plugin-Mastercam — McamManualInstall (английский)
- Plugin-Rhino — PluginRhino (английский)
- Plugin-Rhino — RhinoInstall (английский)
- Plugin-Rhino — RhinoToolbar (английский)
- Plugin-Rhino — GHtoolbar (английский)
- Plugin-Rhino — RhinoSettings (английский)
- Plugin-Rhino — RhinoPluginExamples (английский)
- Plugin-Rhinoraving (английский)
- Plugin-Rhinoraving — Rhino
- Plugin-Rhino — RhinoExample (английский)
- Plugin-Rhino — GrasshopperExample (английский)
- Plugin-Rhino — RhinoManualInstall (английский)
- Plugin-MecSoft — MecSoft (английский)
- Plugin-MecSoft — MecSoftInt50
- Plugin-MecSoft — MecSoftSetup (английский)
- Plugin-MecSoft — RhinoCAMWorkflow (английский)
- Plugin-MecSoft — RhinoCAMUpdate (английский)
- Plugin-MecSoft — RhinoCAMGenera te (английский)
- Plugin-MecSoft — RhinoCAMExamples (English)
- Plugin-MecSoft — RhinoCAMExample3x (английский)
- Plugin-MecSoft — RhinoCAMExample5x (английский)
- Plugin-Inventor Plugin — PluginInvent49 (английский) Inventor (английский) AIInstall (английский)
- Plugin-Inventor — AIToolbar (английский)
- Plugin-Inventor — AISettings (английский)
- Plugin-Inventor — AIPluginExamples (английский)
- Plugin-Inventor — AIExamplePolishing (английский)
- Plugin-Inventor AIExampleCutting (английский)
- Plugin-Inventor — AIManualInstall (английский)
- Plugin-FeatureCAM — FeatureCAM (английский)
- Plugin-FeatureCAM — FCAMintro (английский)
- Plugin-FeatureCAM — FCAMPlugin (английский)
- Plugin-FeatureCAM — FCAMCommands (английский)
- Plugin-FeatureCAM — FCAMSetup (английский)
- Plugin-FeatureCAM — FCAMGenerate (английский)
- Plugin-FeatureCAM — FCAMSettings (Английский)
- Plugin-FeatureCAM — FCAMExamples (Английский)
- Plugin-FeatureCAM — FCAMExample3x (английский)
- Plugin-FeatureCAM — FCAMExample5x (английский)
- Plugin-Fusion360 — PluginFusion360 (английский)
- Plugin-Fusion360 — AF (Английский)
- Plugin-Fusion360 — AFToolbar (английский)
- Plugin-Fusion360 — AFSettings (английский)
- Plugin-Fusion360 — AFPluginExamples (английский)
- Plugin-Fusion360 — AFExampleLaserCutting (английский) 0 — AFExampleLaserCutting-FusionExample (Английский)
- Plugin-Fusion360 — AFExampleDeburring (английский)
- Plugin-Fusion360 — AFManualInstall (английский)
- Robot-Machining — RobotCNC (английский)
- Robot-Machining — MachiningExamples (английский)
- Robot-Machining — ExCNCE (Английский)
- Robot-Machining — ExCNClaser (English)
- Robot-Machining — ExCNC3x (English)
- Robot-Machining — ExCNC 5x (английский)
- Robot-Machining — MachiningSetup (английский)
- Robot-Machining — MachiningProject (английский)
- Robot-Machining — MachiningInput (английский)
- Robot-Machining — MachiningEvents (английский)
- Robot-Machining — MachiningApproach (английский)
- Robot-Machining — MachiningPathToTool (English)
- Robot-Machining — MachiningOptimization (английский)
- Robot-Machining — MachiningStartJoints (английский)
- Robot-Machining — MachiningUpdate (английский)
- Robot-Machining RobCutting (английский)
- Robot-Machining — RobHoldObj (английский)
- Robot-Machining — CurveFollow (английский)
- Robot-Machining — ImportCurves (английский)
- Robot-Machining — PointFollow (английский)
- Robot-Machining — ImportPoints (английский)
- Robot-Machining — Print3D (English)
- Robot-Machining — Print3Dpost (English)
- Tips-and-Tricks — TipsAnd Tricks (английский)
- Tips-and-Tricks — TipSmallerRefs (английский)
- Tips-and-Tricks — TipRenameItem (английский)
- Tips-and-Tricks — TipWorkspace (английский)
- Tips-and-Tricks — TipLastProject ( Английский)
- Советы и уловки — TipTreeSide (английский)
- Советы и уловки — TipShowHideObjects (английский)
- Советы и уловки — TipShowHideText (английский)
- Советы и уловки — TipMoveFrames (английский)
- Tips-and-Tricks — TipMoveTCP (английский)
- Tips-and-Tricks — TipReorderTreeRel (английский)
- Tips-and-Tricks — TipReorderTreeAbs (английский)
- Tips-and-Tricks — TipTreeSize (английский)
- Советы и приемы — TipTeachTarget (английский)
- Советы и приемы — TipModifyTarget (английский)
- Советы и приемы — TipTeachSurfaceTarget (английский)
- Советы и рекомендации — TipMoveSurfaceTarget (английский)
- Tips- and-Tricks — TipTargetConfig (английский)
- Tips-a nd-Tricks — TipCheckProgram (английский)
- Tips-and-Tricks — TipFastSimulation (английский)
- Tips-and-Tricks — TipGenerateProgram (английский)
- Советы и уловки — TipExportSimulation (английский)
- Tips-and- Уловки — TipSendProgram (английский)
- Советы и уловки — TipRunOnRobot (английский)
- Советы и уловки — TipRobotTrace (английский)
- Общие — RoboDKtips (английский)
- Общие — CalibrateTCP (английский)
- Общие — CalibrateFrame (английский)
- Общие — RefAlignObject (английский)
- Общие — RefAlignRobots (английский)
- Общие — CalibrateTurntable (английский)
- Общие — Calibrate1xTurntable (английский)
- Общие — Calibrate2xTurntable (английский)
- ES (Английский)
- ES English)
- General — FastFPS (English)
- General — ExportSim3D (English)
- General — SimulationRatio (English)
- General — CycleTime (Engli sh)
- Общие — ModelRobot (английский)
- Общие — Model1x (английский)
- Общие — Model6axis (английский)
- Общие — Model3axis (английский)
- Общие — SyncAxes (английский)
- Общие — AxesOptimization (английский)
- Collision-Avoidance — GeneralCollisions (английский)
- Collision-Avoidance — Collisions (English)
- Collision-Avoidance — CollisionMap (английский)
- Collision-Avoidance — FasterCollisionCheck (английский)
- Collision-Avoidance — CollisionMachining (английский)
- Предотвращение столкновений — CollisionPRM (на английском языке)
- Предотвращение столкновений — SummaryPRM (на английском языке)
- Предотвращение столкновений — SetupPRM (на английском языке)
- Предотвращение столкновений — JointLimitPRM (на английском языке)
- Предотвращение столкновений — SettingsPRM (на английском языке)
- Предотвращение столкновений — RoadmapPRM (английский)
- Предотвращение столкновений — TargetsPRM (английский)
- Collision-Avoid ance — ProgramsPRM (English)
- Collision-Avoidance — AddTargetsPRM (English)
- Collision-Avoidance — TipsPRM (English)
- Example-Polishing — (English)
- Example-Polishing — POLintro (English)
- Example-Polishing — POLExample (English)
- Example-Polishing — POLsetup (English)
- Example-Polishing — 3DSKInventor (English)
- Example-Polishing — POLStation (English)
- Example-Dispensing — (English)
- Example-Dispensing — LDISintro (английский)
- Пример дозирования — LDISExample (английский)
- Пример дозирования — LDISetup (английский)
- Пример дозирования — 2DSKSolidWorks (английский)
- Пример дозирования — LDIStation (английский)
- Пример-3- Axis-Mold-Machining — (английский)
- Пример-3-Axis-Mold-Machining — 3xMachiningIntro (английский)
- Пример-3-Axis-Mold-Machining — 3xMachiningExample (английский)
- Пример-3-Axi s-Mold-Machining — 3xMachiningSettings (английский)
- Пример-3-Axis-Mold-Machining — 3xMachiningMastercam (английский)
- Пример-3-Axis-Mold-Machining — 3xMachiningRoboDK (английский)
- Пример-5-Axis- Cutting — (английский)
- Example-5-Axis-Cutting — 5xCuttingIntro (English)
- Example-5-Axis-Cutting — 5xCuttingExample (английский)
- Example-5-Axis-Cutting — 5xCuttingSettings (English)
- Example -5-Axis-Cutting — 5xCuttingMastercam (английский)
- Example-5-Axis-Cutting — 5xCuttingRoboDK (English)
- Example-Laser-Cutting — (English)
- Example-Laser-Cutting — LCUTintro (English)
- Пример лазерной резки — LCUT Пример (английский)
- Пример лазерной резки — LCUTSetup (английский)
- Пример лазерной резки — MET1Featex (английский)
- Пример лазерной резки — MET2Fusion360 (английский)
- Пример- Плагин Pick-and-Place-(английский)
- Example-Pick-and-Place -Plugin — PnPpluginCAD (английский)
- Example-Pick-and-Place-Plugin — PluginPnPpick (английский)
- Example-Pick-and-Place-Plugin — PluginPnPpickseq (английский)
- Example-Pick-and-Place-Plugin — PluginPnPcreatePick (английский)
- Example-Pick-and-Place-Plugin — PluginPnPinit (английский)
- Example-Pick-and-Place-Plugin — PluginPnPdetach (английский)
- Example-Pick-and-Place-Plugin — PluginPnPplace (Английский)
- Плагин-пример выбора-и-места — PluginPnPsetupplace (английский)
- Плагин-пример-«выберите и-место-место» — «ПлагинPnP» (английский)
- Плагин-пример-выберите-и-место — — PluginPnPmodif (английский )
- Robots-ABB — ABB (английский)
- Robots-ABB — ProgTransferABB (английский)
- Robots-ABB — ProgStartABB (английский)
- Robots-ABB — TCP-ABB (английский)
- Robots-ABB — FTP -ABB (английский)
- Роботы-ABB — DriverABB (английский)
- Роботы-Denso — Denso (английский)
- Robots-Denso — DensoBCAP (английский)
- Robots-Denso — DriverDenso (английский)
- Robots-Denso — DensoDriverCustom (английский)
- Robots-Fanuc — Fanuc (английский)
- Robots-Fanuc — ProgTransferFanuc (английский)
- Robots-Fanuc — ProgStartFanuc (английский)
- Robots-Fanuc — GetJointsFanuc (английский)
- Robots-Fanuc — TCP-Fanuc (английский)
- Robots-Fanuc — FTP-Fanuc (английский)
- Robots-Fanuc — DriverFanuc ( Английский)
- Robots-Fanuc — LSvsTP (английский)
- Robots-KUKA — KUKA (английский)
- Robots-KUKA — ProgTransferKUKA (английский)
- Robots-KUKA — StartProgKUKA (английский)
- Robots-KUKA — TCP- KUKA (английский)
- Robots-KUKA — GetJointsKUKA (английский)
- Robots-KUKA — AdminModeKUKA (английский)
- Robots-KUKA — DriverKUKA (английский)
- Robots-Motoman — Motoman (английский)
- Robots-Motoman — DriverMotoman (английский)
- Роб ots-Motoman — MotomanPulses (английский)
- Robots-Universal-Robots — UR (английский)
- Robots-Universal-Robots — UR-IP (английский)
- Robots-Universal-Robots — DriverUR (английский)
- Robots- Universal-Robots — DriverURRemoteEnable (английский)
- Robots-Universal-Robots — UR-Monitor (английский)
- Robots-Universal-Robots — UR-StartProg (английский)
- Robots-Universal-Robots — UR-URP (английский)
- Robots-Universal-Robots — UR-Script (английский)
- Robots-Universal-Robots — UR-FTP (английский)
- Robots-Universal-Robots — UR-Kinematics (английский)
- Robots-Omron-TM — Omron-TM (английский)
- Robots-Omron-TM — TM-USB (английский)
- Robots-Omron-TM — TM-StartProg (английский)
- Постпроцессоры — Постпроцессор (английский)
- Постпроцессоры — SelectPost (английский)
- Постпроцессоры — EditPost (английский)
- Постпроцессоры — EditSamplePost (английский)
- Постпроцессоры — PostSampleMoveJ (английский)
- Постпроцессоры — PostSampleSpeed (английский)
- Постпроцессоры — PostSampleOneProg (английский)
- Постпроцессоры — AvailablePosts (английский)
- Постпроцессоры — RefPostProc (английский)
- Virtual-Reality — VR (English)
- Virtual-Reality — VRactions (English)
- Virtual-Reality — VRDisplayPerf (English)
- Virtual-Reality — VRquality (English)
- Virtual-Reality — ViewManager (English)
- RoboDK-API — RoboDKAPI (английский)
- RoboDK-API — PythonAPI (английский)
- RoboDK-API — PythonAPISim (английский)
- RoboDK-API — PythonAPIOLP (английский)
- RoboDK-API — PythonAPIOnline (английский)
- RoboDK-API — PythonTroubleshoot (английский)
- RoboDK-API — CsAPI (английский)
- RoboDK-API — CsAPISim (английский)
- RoboDK-API — CsAPIOLP (английский)
- RoboDK-API — CsAPIOnline (En glish)
- RoboDK-API — MatlabAPI (английский)
- RoboDK-API — Simulink (английский)
- RoboDK-API — CommandLine (английский)
- Robot-Drivers — RobotDrivers (английский)
- Robot-Drivers — UseDriver ( Английский)
- Robot-Drivers — DriverGUI (English)
- Robot-Drivers — DriverAPI (English)
- Robot-Drivers — DriverCustom (English)
- Robot-Drivers — DriverTroubleshoot (English)
- Robot-Drivers — RobotPingCmd ( Английский)
- Robot-Drivers — StaticIP-PC (English)
- Robot-Automatic-Calibration — AutoCalibGage (English)
- Robot-Automatic-Calibration — AutoCalib-Intro (English)
- Robot-Automatic-Calibration — AutoCalib- Требования (английский)
- Robot-Automatic-Calibration — AutoCalib-Sim (English)
- Robot-Automatic-Calibration — AutoCalib-Quick (английский)
- Robot-Automatic-Calibration — AutoCalib-Custom (English)
- Robot- Автомат atic-Calibration — AutoCalib-Results (English)
- Robot-Automatic-Calibration — AutoCalib-Run (English)
- Robot-Automatic-Calibration — AutoCalib-ValidTCP (English)
- Robot-Automatic-Calibration — AutoCalib-ValidRobotTCP ( English)
- Robot-Automatic-Calibration — AutoCalib-Params (английский)
- Robot-Automatic-Calibration — AutoCalib-Panel (English)
- Robot-Automatic-Calibration — AutoCalib-Settings (English)
- Robot-Automatic- Калибровка — Calib-Filter (английский)
- Robot-Automatic-Calibration — Calib-AccurateOLP (English)
- Robot-Automatic-Calibration — Calib-AccurateDH (английский)
- Robot-Automatic-Calibration — Calib-AccurateFilter (английский)
- Robot-Automatic-Calibration — Calib-AccurateAPI (английский)
- Robot-Automatic-Calibration — FilterTargetAPI (English)
- Robot-Automatic-Calibration — FilterProgramAPI (English)
- Robot-Automatic-Calibr ation — Calib-RedoSetup (English)
- Robot-Automatic-Calibration — Calib-RedoTool (English)
- Robot-Automatic-Calibration — Calib-RedoFrame (English)
- Robot-Calibration-LaserTracker — (English)
- Робот -Calibration-LaserTracker — RobotCalibrationLT (английский)
- Robot-Calibration-LaserTracker — CalibLT-Requirements (английский)
- Robot-Calibration-LaserTracker — CalibLT-Offline (английский)
- Robot-Calibration-LaserTracker — CalibLT-Station (английский) )
- Robot-Calibration-LaserTracker — CalibLT-Generate (на английском языке)
- Robot-Calibration-LaserTracker — CalibLT-Setup (на английском языке)
- Robot-Calibration-LaserTracker — CalibLT-Connect (на английском языке)
- Robot-Calibration-LaserTracker — CalibLT-Driver (английский)
- Robot-Calibration-LaserTracker — CalibLT-Reference (английский)
- Robot-Calibration-LaserTracker — CalibLT-Calibration (английский)
- Robot-Calibration-LaserTrack er — CalibLT-Base (английский)
- Robot-Calibration-LaserTracker — CalibLT-Tool (английский)
- Robot-Calibration-LaserTracker — CalibLT-Calib (английский)
- Robot-Calibration-LaserTracker — CalibLT-Valid (английский)
- Robot-Calibration-LaserTracker — CalibLT-Results (English)
- Robot-Calibration-LaserTracker — CalibLT-Filter (English)
- Robot-Calibration-LaserTracker — FilterProgAPI-LT (английский)
- Robot-Calibration-LaserTracker — FilterTargetAPI-LT (английский)
- Robot-Calibration-LaserTracker — CalibLT-Master (английский)
- Robot-Calibration-LaserTracker — CalibLT-RedoSetup (английский)
- Robot-Calibration-LaserTracker — CalibLT-RedoTool (английский)
- Robot-Calibration-LaserTracker — CalibLT-RedoFrame (английский)
- Robot-Calibration-LaserTracker — CalibLT-Mastering16 (английский)
- Robot-Calibration-LaserTracker — CalibLT-Mastering6 (английский)
- Robot-Calibratio n-LaserTracker — CalibLT-Mastering1 (английский)
- Robot-Calibration-LaserTracker — CalibLT-TrackerTest (английский)
- Robot-Calibration-Creaform — (английский)
- Robot-Calibration-Creaform — RobotCalibrationCT (английский)
- Robot -Calibration-Creaform — CalibCT-Requirements (английский)
- Robot-Calibration-Creaform — CalibCT-Offline (английский)
- Robot-Calibration-Creaform — CalibCT-Station (английский)
- Robot-Calibration-Creaform — CalibCT-Generate (Английский)
- Robot-Calibration-Creaform — CalibCT-Setup (английский)
- Robot-Calibration-Creaform — CalibCT-HandyProbe (английский)
- Robot-Calibration-Creaform — CalibCT-Tracker (английский)
- Robot-Calibration -Creaform — CalibCT-Driver (английский)
- Robot-Calibration-Creaform — CalibCT-Calibration (английский)
- Robot-Calibration-Creaform — CalibCT-Base (английский)
- Robot-Calibration-Creaform — CalibCT-Tool (английский) ) 900 50
- Robot-Calibration-Creaform — CalibCT-Calib (английский)
- Robot-Calibration-Creaform — CalibCT-Valid (английский)
- Robot-Calibration-Creaform — CalibCT-Results (английский)
- Robot-Calibration-Creaform — CalibCT-Filter (английский)
- Robot-Calibration-Creaform — FilterProgAPI-CT (английский)
- Robot-Calibration-Creaform — FilterTargetAPI-CT (английский)
- Robot-Calibration-Creaform — CalibCT-Master (английский)
- Robot-Calibration-Creaform — CalibCT-RedoSetup (английский)
- Robot-Calibration-Creaform — CalibCT-RedoTool (английский)
- Robot-Calibration-Creaform — CalibCT-RedoFrame (английский)
- Robot-Calibration-Creaform — CalibCT- Mastering16 (английский)
- Robot-Calibration-Creaform — CalibCT-Mastering6 (Английский)
- Robot-Calibration-Creaform — CalibCT-Mastering1 (английский)
- Robot-Validation-Ballbar-Test — (английский)
- Robot-Validation -Шар-тест — Ballba rTesting (английский)
- Robot-Validation-Ballbar-Test — BallbarRequirements (English)
- Robot-Validation-Ballbar-Test — BallbarOffline (английский)
- Robot-Validation-Ballbar-Test — BallbarRDK (английский)
- Robot- Validation-Ballbar-Test — BallbarSetup (английский)
- Robot-Validation-Ballbar-Test — BallbarTest (английский)
- Robot-Validation-Ballbar-Test — BallbarReport (английский)
- Robot-Validation-ISO9283 — (английский)
- Robot-Validation-ISO9283 — ISO9283Testing (английский)
- Robot-Validation-ISO9283 — ISO9283-Requirements (English)
- Robot-Validation-ISO9283 — ISO9283-Offline (английский)
- Robot-Validation-ISO9283 — ISO9283 (English)
- Robot-Validation-ISO9283 — ISO9283-Path (English)
- Robot-Validation-ISO9283 — ISO9283-Results (English)
Промышленные роботы для машин | Уход за роботами
Что такое робот для ухода за машинами?
Обслуживание роботизированных машин — это процесс использования роботизированной системы для автоматической загрузки и разгрузки станка. Инструменты могут быть разными: от фрезерных и токарных станков до отрезных станков и прессов. Роботы хорошо подходят для этого приложения, поскольку оно может быть опасным для человека-оператора и требует высокого уровня согласованности. К другим преимуществам относятся более высокая степень использования оборудования и меньшее время простоя для рабочих и последующих процессов, что приводит к более высокой общей производительности.
Инструменты могут быть разными: от фрезерных и токарных станков до отрезных станков и прессов. Роботы хорошо подходят для этого приложения, поскольку оно может быть опасным для человека-оператора и требует высокого уровня согласованности. К другим преимуществам относятся более высокая степень использования оборудования и меньшее время простоя для рабочих и последующих процессов, что приводит к более высокой общей производительности.
Что такое роботизированная машина?
Использование роботов для координации с другими функциями промышленной машины позволяет машине работать без вмешательства человека, эффективно выступая в качестве компонента самой машины.Это можно сделать множеством способов, от простых 1- или 2-осевых установок до 6-осевых манипуляторов промышленных роботов с диапазонами движения, подобными человеческим.
Какие отрасли используют роботов для ухода за машинами?
Обслуживание станков в металлообрабатывающей промышленности — обычное дело. Независимо от того, является ли процесс токарной, фрезерной, шлифовальной, протяжной или расточной, робот может точно загружать и выгружать детали, устраняя несоответствия ручного процесса. Уход за роботизированными машинами не ограничивается металлами; он предлагает преимущества производителям, также работающим с полимерами, керамикой и композитами.
Независимо от того, является ли процесс токарной, фрезерной, шлифовальной, протяжной или расточной, робот может точно загружать и выгружать детали, устраняя несоответствия ручного процесса. Уход за роботизированными машинами не ограничивается металлами; он предлагает преимущества производителям, также работающим с полимерами, керамикой и композитами.
Почему Yaskawa Motoman?
Годы сотрудничества в проектах с производителями оборудования, интеграторами робототехники и конечными клиентами делают Yaskawa Motoman ценным ресурсом для простых и эффективных вариантов обслуживания роботизированных машин. Недавний запуск наших пакетов Smart Series может значительно упростить развертывание роботов, снизить затраты и предложить варианты совместной работы с машинами.
Станки
Робототехника предлагает недорогой метод автоматизации операций со станками.Этот пример системы включает склад для деталей с четырьмя выдвижными ящиками, который может содержать ряд деталей, которые могут обеспечить продолжительные периоды автономной работы. Гнезда деталей можно изменять для обработки множества деталей с помощью одного штабелеукладчика.
Гнезда деталей можно изменять для обработки множества деталей с помощью одного штабелеукладчика. Портальная система MotoRail ™
В MotoRail ™ используется стандартный шестиосевой робот и седьмая ось для рельса, что обеспечивает более широкий диапазон движения и дополнительный радиус действия. Направляющая позволяет эффективно использовать робота, когда время обработки увеличивается и / или напольная автоматизация не идеальна.
Индивидуальные решения
Yaskawa Motoman предлагает индивидуальные решения автоматизации для удовлетворения индивидуальных потребностей. В соответствии с вашими потребностями можно добавить различные периферийные устройства, включая захваты, стойки повторного захвата, машинные интерфейсы и системы технического зрения.Что такое автономные роботы? | Маршрутная робототехника
Что такое автономность? Автономность — это способность принимать собственные решения. У людей автономия позволяет нам выполнять самые значимые, не говоря уже о бессмысленных задачах.Сюда входят такие вещи, как ходьба, разговор, махание руками, открытие дверей, нажатие кнопок и замена лампочек. В роботах автономия ничем не отличается.
У людей автономия позволяет нам выполнять самые значимые, не говоря уже о бессмысленных задачах.Сюда входят такие вещи, как ходьба, разговор, махание руками, открытие дверей, нажатие кнопок и замена лампочек. В роботах автономия ничем не отличается.
Автономные роботы, как и люди, также могут принимать собственные решения, а затем выполнять соответствующие действия. Подлинно автономный робот может воспринимать свое окружение, принимать решения на основе того, что он воспринимает и / или был запрограммирован на распознавание, а затем запускает движение или манипуляции в этой среде.Что касается мобильности, например, эти действия, основанные на принятии решений, включают в себя, помимо прочего, следующие основы: пуск, остановку и маневрирование вокруг препятствий, стоящих на их пути.
Но прежде чем обсуждать, что на самом деле делает робота автономным, давайте обсудим одно из наиболее распространенных заблуждений, связанных с современными роботами.
Прежде чем мы начнем, я предлагаю вам получить наше бесплатное руководство по покупке автономного мобильного робота — Загрузить здесь>
Сегодняшний робот — настоящий робот?
В течение последних 10-15 лет идея робототехники в значительной степени вовлекала дистанционно управляемых мобильных роботов, оснащенных камерами, которые использовались, чтобы увидеть что-то вне досягаемости.Например, не только мобильные роботы с камерами используются для исследования подземных шахт, но и летающие роботы (также известные как дроны) используются для исследования участков, недоступных для людей, а подводные роботы используются для поиска и обнаружения затонувших кораблей в самых глубоких глубинах. наши океаны. Хотя такое использование роботов оказалось невероятно эффективным на протяжении многих лет, эти примеры никоим образом не отражают использование действительно автономных роботов.
На самом деле, термин «робот» снова и снова использовался на протяжении многих лет чрезмерно рьяными маркетологами, которые хотят, чтобы их клиенты думали, что их продукт представляет собой своего рода сложный искусственный интеллект. Кроме того, истинное определение робота также было чрезмерно упрощено и часто использовалось взаимозаменяемо с тем, что по существу сводится к предварительно запрограммированным машинам, не говоря уже об автоматических исполнительных механизмах, таких как роботизированные руки или системы управления движением. Лучший пример этого можно найти в автомобильной промышленности.
Кроме того, истинное определение робота также было чрезмерно упрощено и часто использовалось взаимозаменяемо с тем, что по существу сводится к предварительно запрограммированным машинам, не говоря уже об автоматических исполнительных механизмах, таких как роботизированные руки или системы управления движением. Лучший пример этого можно найти в автомобильной промышленности.
Худший пример (не совсем) автономного робота
Если заглянуть еще дальше во времени, то классические промышленные машины, которые можно встретить на сборочном конвейере производителя автомобилей, хронически ошибочно называют роботами.На самом деле, хотя это удивительные инженерные достижения, они удивительно похожи на фрезерные станки, которые работают с числовым программным управлением (ЧПУ).
В отличие от действительно автономного робота, эти промышленные машины предварительно запрограммированы на выполнение повторяющихся движений. Они не умеют реагировать. Например, что произойдет, если один из этих так называемых роботов, ответственных за установку запасных шин в багажник автомобиля, столкнется со случайной ситуацией, в которой багажник будет закрыт. Знает ли «робот», что шину устанавливать нельзя? Возможно нет.Вместо этого эта машина продолжала бы выполнять свою запрограммированную задачу и, скорее всего, в конечном итоге пробила бы шину прямо через крышку багажника. Если бы эта машина была действительно автономным роботом, то она знала бы, что не следует устанавливать шину, основываясь на информации, полученной из восприятия ситуации и зная, что багажник на самом деле не открыт.
Знает ли «робот», что шину устанавливать нельзя? Возможно нет.Вместо этого эта машина продолжала бы выполнять свою запрограммированную задачу и, скорее всего, в конечном итоге пробила бы шину прямо через крышку багажника. Если бы эта машина была действительно автономным роботом, то она знала бы, что не следует устанавливать шину, основываясь на информации, полученной из восприятия ситуации и зная, что багажник на самом деле не открыт.
Так какой же хороший пример автономного робота?
Почему Roomba — настоящий автономный робот
Roomba, несомненно, является самым продуктивным и действительно автономным роботом на рынке сегодня.Несмотря на то, что Roomba стоит всего несколько сотен долларов, он способен принимать решения и действовать в зависимости от того, что он воспринимает в окружающей среде. Его можно поместить в комнату, оставить в покое, и он будет выполнять свою работу без какой-либо помощи или надзора со стороны человека.
Вместо этого набор датчиков позволяет Roomba воспринимать окружающую среду, принимать решение на основе этих ощущений, а затем предпринимать соответствующие действия. Проще говоря, если Roomba натолкнется на стул, он сможет почувствовать стул и уклониться от него, изменив его направление.Кроме того, в Roomba есть детектор грязи, который определяет, когда грязь была обнаружена, и тратит больше времени на уборку в этой области. Таким образом, автономность Roomba выходит за рамки навигации и мобильности и включает в себя возможность решить для более тщательной уборки зоны, основываясь на его способности ощущать, что пол грязный, и его способности использовать свои приводы для его очистки.
Проще говоря, если Roomba натолкнется на стул, он сможет почувствовать стул и уклониться от него, изменив его направление.Кроме того, в Roomba есть детектор грязи, который определяет, когда грязь была обнаружена, и тратит больше времени на уборку в этой области. Таким образом, автономность Roomba выходит за рамки навигации и мобильности и включает в себя возможность решить для более тщательной уборки зоны, основываясь на его способности ощущать, что пол грязный, и его способности использовать свои приводы для его очистки.
Важнейшие компоненты автономного робота
Ключевые компоненты автономного действия, упомянутого выше, включают эти три ключевых концепции: восприятие, решение и приведение в действие.
Восприятие:
Для людей это в основном наши пять чувств. Глаза, уши, кожа, волосы и многие другие биологические механизмы используются для восприятия мира. Для робота восприятие означает датчики. Лазерные сканеры, камеры стереовидения (глаза), датчики удара (кожа и волосы), датчики силы-момента (напряжение мышц) и даже спектрометры (запах) используются в качестве устройств ввода для робота.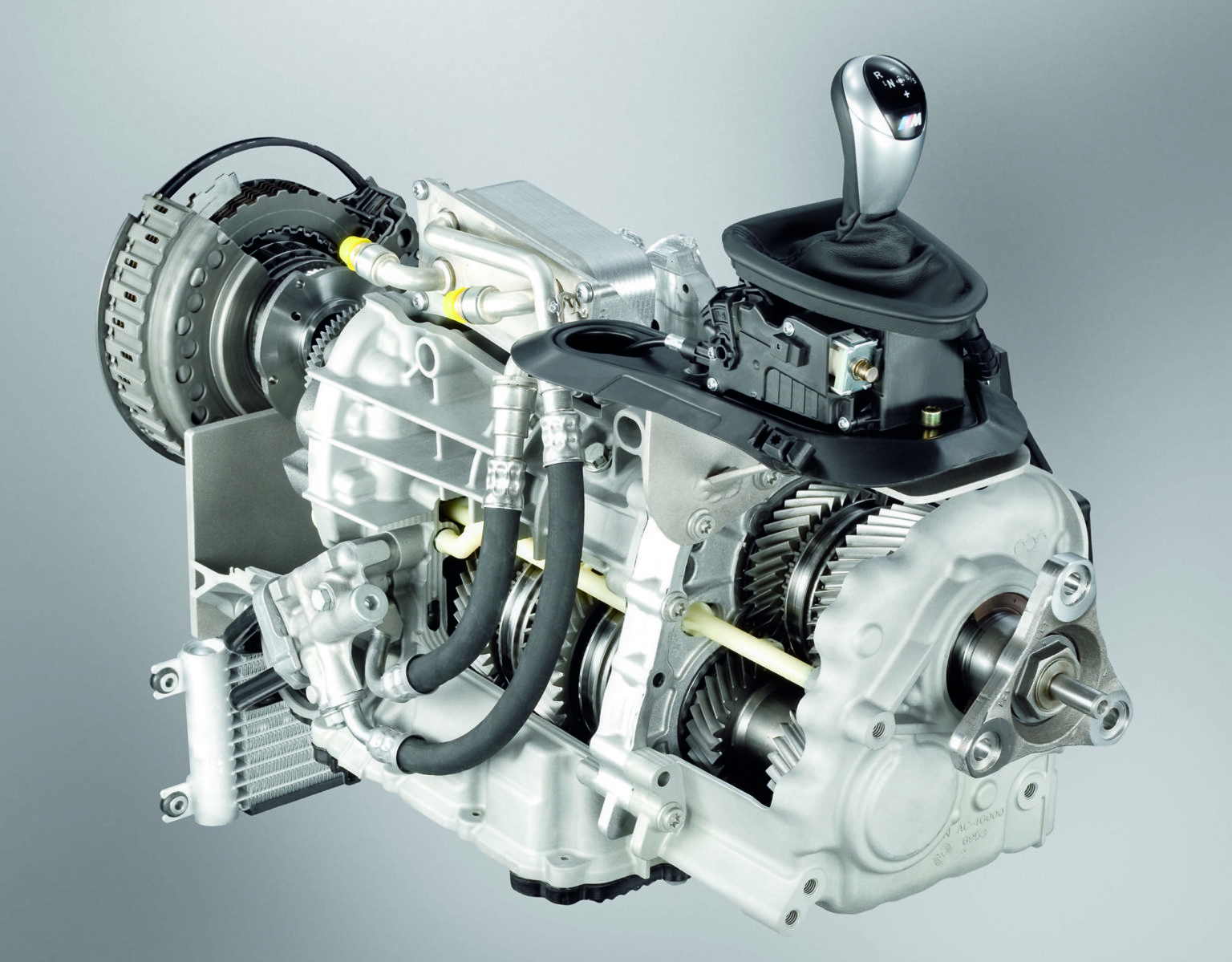 И с людьми, и с роботами теперь мы можем думать о других видах ввода информации, например о бесконечном потоке данных из Интернета; Фактически, можно думать об Интернете вещей как о бесконечном море датчиков с очень длинными проводами, идущими назад к роботам, которые могут их использовать.
И с людьми, и с роботами теперь мы можем думать о других видах ввода информации, например о бесконечном потоке данных из Интернета; Фактически, можно думать об Интернете вещей как о бесконечном море датчиков с очень длинными проводами, идущими назад к роботам, которые могут их использовать.
Решение:
Для людей большинство решений принимает наш мозг; или в некоторых случаях наша «кишка» или даже наша нервная система. Наш мозг принимает решения более высокого уровня, например, о том, где мы хотим идти. Но иногда наша биология вытесняет наш мозг, и наши тела реагируют на вещи еще до того, как наш мозг даже узнает, что происходит. Это рефлексивное поведение, например, когда веки закрываются быстрее, чем летящий кусок мусора, происходит быстрее и без разрешения нашего мозга с целью обеспечения нашей безопасности.У автономных роботов аналогичная структура принятия решений. «Мозг» робота — это обычно компьютер, и он принимает решения на основе своей миссии и информации, которую он получает в процессе. Но роботы также обладают способностями, аналогичными неврологической системе человека, где их системы безопасности работают быстрее и без разрешения мозга; На самом деле мозг роботов работает с разрешения системы безопасности. В автономном роботе мы называем эту «неврологической» системой встроенную систему; он работает быстрее и надежнее, чем компьютер, выполняющий план миссии и анализирующий данные.Таким образом робот может решить остановиться, если он заметит препятствие на своем пути, если он обнаружит проблему с собой или если будет нажата его кнопка аварийной остановки.
Но роботы также обладают способностями, аналогичными неврологической системе человека, где их системы безопасности работают быстрее и без разрешения мозга; На самом деле мозг роботов работает с разрешения системы безопасности. В автономном роботе мы называем эту «неврологической» системой встроенную систему; он работает быстрее и надежнее, чем компьютер, выполняющий план миссии и анализирующий данные.Таким образом робот может решить остановиться, если он заметит препятствие на своем пути, если он обнаружит проблему с собой или если будет нажата его кнопка аварийной остановки.
Управление:
У людей есть исполнительные механизмы, называемые мышцами. Они принимают всевозможные формы и выполняют самые разные функции, от захвата чашки кофе до биения наших сердец и перекачивания крови. У роботов тоже могут быть все виды приводов, и в основе привода обычно лежит какой-то двигатель.Будь то колесо, линейный привод или гидроцилиндр, всегда есть двигатель, преобразующий энергию в движение. Бесконечные изменения приводов доставляют радость и восхищение людям, которые их создают и работают с ними.
Бесконечные изменения приводов доставляют радость и восхищение людям, которые их создают и работают с ними.
Итак, автономный робот — это робот, который сам решает, какое действие ему следует предпринять, на основе информации, которую он воспринял.
Если у вас есть проект или идея, требующие более глубокого понимания автономной робототехники, свяжитесь с нами сегодня.Мы хотели бы узнать больше о вашем проекте и обсудить решения, доступные от Waypoint.
Amazon Boxing Machines работают намного быстрее, чем люди
В последние годы появилось много сообщений, предупреждающих о потере рабочих мест в будущем, поскольку машины заменяют людей во многих отраслях промышленности.
Однако многие компании отрицают, что планируют использовать роботов для замены рабочих. Они говорят, что вместо этого машины будут работать вместе с людьми для улучшения рабочих процессов. Некоторые предприятия также заявили, что многие рабочие, замененные технологией, могут быть переобучены, чтобы сохранить свои рабочие места.
Онлайн-продавец из США Amazon — одна из компаний, которая уже добавила робототехнику в некоторые из своих складских операций . Теперь в новом отчете информационного агентства Reuters описывается один процесс Amazon, который может заменить множество людей.
На этой фотографии из архива от 13 февраля 2015 года рабочий кладет товар в коробку для отправки в центре выполнения заказов Amazon.com в Дюпон, Вашингтон.Amazon добавила новые машины на склады, которые могут полностью загружать коробки при подготовке к отправке, сообщает Reuters.Информационное агентство сообщает, что получило информацию от двух человек, которые работали над проектом автоматизации для Amazon.
Товары с идентификационной информацией поступают в машину по движущейся ленте . Машина оснащена компьютерной системой, которая распознает каждый продукт, проектирует и создает коробку, которая точно соответствует его размеру и форме. Затем машина помещает продукты в коробку и маркирует контейнер для отправки.
Итальянская технологическая компания CMC создала систему под названием CartonWrap.Официальные лица эту историю не комментировали. Но Reuters сообщило, что люди, работавшие над проектом Amazon, заявили, что машины могут обрабатывать от 600 до 700 коробок в час. Это примерно в четыре-пять раз быстрее, чем люди могут сделать эту работу.
Машины требуют, чтобы один человек загружал продукты, другой — для наполнения коробок материалом, а третий — для устранения возможных проблем с машиной, сообщает Reuters. В отличие от людей, машины могут работать непрерывно, без перерывов.
Люди, участвовавшие в проекте, заявили, что Amazon до сих пор использовала машины только на небольшом количестве своих 55 U.С. склады. На каждом складе работает около 2000 человек.
Сообщается, что Amazon рассматривает возможность размещения систем на многих своих складах в США. Если это произойдет, с каждого склада может быть удалено до 24 рабочих мест, сообщает Reuters. Это может привести к сокращению более чем 1300 рабочих мест.
Информационное агентство сообщило, что неясно, когда машины могут быть добавлены на дополнительные склады. Такое масштабное внедрение новых технологий в компаниях обычно занимает много времени, поскольку требует множества испытаний и согласований.
Робот организует контейнеры в центре выполнения заказов Amazon площадью 855000 квадратных футов на Статен-Айленде, одном из пяти районов Нью-Йорка, 5 февраля 2019 года.Пресс-секретарь Amazon предоставила Reuters заявление. «Мы тестируем эту новую технологию с целью повышения безопасности, ускорения доставки в раза и повышения эффективности по всей нашей сети», — заявила пресс-секретарь. «Мы ожидаем, что сэкономленные средства будут реинвестированы в новые услуги для клиентов, где будут и дальше создаваться новые рабочие места.”
Дэйв Кларк, главный вице-президент Amazon по международным операциям, написал в Твиттере об отчете Reuters. Он отметил, что тестируемая система хороша тем, что «делает упаковки меньше с меньшими общими картонными отходами». А о проблеме замены людей технологиями он писал: «Несмотря на весь этот страх потерять работу, проблема №1 для большинства из нас — найти достаточно людей, чтобы заполнить рабочие места, которые у нас есть, и новые, которые мы создаем».
А о проблеме замены людей технологиями он писал: «Несмотря на весь этот страх потерять работу, проблема №1 для большинства из нас — найти достаточно людей, чтобы заполнить рабочие места, которые у нас есть, и новые, которые мы создаем».
Amazon на протяжении многих лет наращивает штат сотрудников и является одним из крупнейших в США.С. работодатели. Столкнувшись с критикой за низкую заработную плату и продолжительный рабочий день, компания объявила о повышении стартовой заработной платы для всех сотрудников в США до 15 долларов в час. Amazon уже перешла на автоматизацию части своих складских операций. Например, Amazon использует роботизированные машины для определения цены на товары и транспортировки товаров рабочим на складах.
В прошлом месяце репортер Reuters посетил центр выполнения заказов в Балтиморе, штат Мэриленд. Представители Amazon заявили репортеру, что широкомасштабная автоматизация вряд ли произойдет быстро.Основная причина этого в том, что Amazon и другим компаниям не удалось найти подходящую роботизированную руку. Компаниям было сложно разработать роботизированную руку, которая могла бы обрабатывать множество различных продуктов с той же осторожностью и эффективностью, что и люди.
Компаниям было сложно разработать роботизированную руку, которая могла бы обрабатывать множество различных продуктов с той же осторожностью и эффективностью, что и люди.
Я Брайан Линн.
Информационное агентство Reuters сообщило об этом. Брайан Линн адаптировал его для VOA Learning English. Кэти Уивер была редактором.
Как, по вашему мнению, машины изменят мир труда в будущем? Следует ли ограничивать технологии для защиты рабочих мест? Напишите нам в разделе комментариев, и посетите нашу страницу в Facebook .
Тест— Отчет: Боксерские машины Amazon работают намного быстрее, чем люди
Начните викторину, чтобы узнать
_____________________________________________________________
слов в этой истории
склад — н. Большое здание для хранения товаров на продажу
автоматика — н.