Что такое курсовая устойчивость? — Авто-ремонт
Система курсовой устойчивости (другое наименование — система динамической стабилизации) предназначена для сохранения устойчивости и управляемости автомобиля за счет заблаговременного определения и устранения критической ситуации.
Как работает курсовая устойчивость на автомобиле?
Основной функцией системы курсовой устойчивости является сохранение автомобилем вектора движения при сложном и резком маневре. Главная задача — избежать заноса при резком повороте руля или неправильно выбранной скорости. … Electronic Stability Program работает постоянно, анализируя поведение машины каждую секунду.
Как работает система курсовой устойчивости ESC?
С помощью датчиков ESC оценивает действия человека за рулем, а также параметры движения машины. Для оценки действий человека за рулем система курсовой устойчивости использует датчики давления в тормозной системе и угла поворота рулевого колеса, а также выключатель стоп-сигнала.
Где находится датчик курсовой устойчивости?
Снятие-установка до боли проста: датчик находится под водительским сиденьем справа. Сдвигаем сиденье до упора вперед, немного в неудобной позе откручиваем болты крепления металлического кожуха и два болта на «10» крепления самого датчика, снимаем штекер и собираем в обратной последовательности.
Как работает система стабилизации?
ESP помимо датчиков ABS, котролирующих скорость вращения всех колес, включает в себя сенсоры вращения вокруг вертикальной оси автомобиля, угла поворота руля и бокового ускорения. … Система стабилизации постоянно следит за траекторией движения автомобиля, сравнивая ее с то, которая должна быть согласно углу поворота руля.
Как работает система динамической стабилизации?
С помощью датчиков система динамической стабилизации оценивает действия водителя и параметры движения автомобиля. … Оценивают фактические параметры движения датчики частоты вращения колес, продольного и поперечного ускорения, угловой скорости автомобиля, давления в тормозной системе.
… Оценивают фактические параметры движения датчики частоты вращения колес, продольного и поперечного ускорения, угловой скорости автомобиля, давления в тормозной системе.
Как работает система ESP?
ESP контролирует поперечную динамику автомобиля, помогая водителю в критических ситуациях, тем самым предотвращая срыв автомобиля в занос или в боковое скольжение. По сути, система стабилизации сохраняет курсовую устойчивость, траекторию движения и стабилизирует автомобиль во время выполнения маневров.
Что такое ESC off в машине?
Электронный контроль устойчивости (англ. Electronic Stability Control, ESC; ЭКУ) или динамическая система стабилизации автомобиля — активная система безопасности автомобиля, позволяющая предотвратить занос посредством управления компьютером момента силы колеса (одновременно одного или нескольких).
Зачем отключать систему стабилизации?
Если вы автогонщик, любите дрифтить автомобиль или не хотите, чтобы система стабилизации вмешалась в управление автомобилем, вы должны отключить ESP. … Если не отключите ESP, система ограничит скольжение колес не только притормаживанием колес, но и уменьшит передачу крутящего момента на них.
… Если не отключите ESP, система ограничит скольжение колес не только притормаживанием колес, но и уменьшит передачу крутящего момента на них.
Что такое ESP и как она работает?
ESP (Electronic Stability Program) – электронная система динамической стабилизации автомобиля. Эта система создана для помощи при вождении автомобиля. Ее основная задача – сохранение курсовой устойчивости, то есть она должна помогать предотвращать занос и боковое скольжение в критических ситуациях.
Что такое ESP в автомобиле?
ESP создана, чтобы не допускать его. Аббревиатура ESP (Electronic Stability Program) — самая распространённая из множества существующих на сегодняшний день для обозначения системы динамической стабилизации автомобиля.
Что такое ESP OFF в машине?
Системой динамической стабилизации автомобиля, которая чаще всего называется ESP, теперь оборудованы даже бюджетные автомобили. В машинах с этой опцией практически всегда есть клавиша с надписью «ESP OFF» для отключения электронного помощника.
Как убрать ошибку ESP?
Убираем ошибку
- Вставляем ключ в зажигание.
- Нажимаем педаль тормоза. …
- Поворачиваем в положение зажигание (когда загораюся все лампочки)
- Ждем когда закончит гореть значек айрбэга — ESP.
- Не позднее 1 секунды после этого выключаем зажигание
- Ждем 3 секунды.
- повторяем пункты 3-6 еще 3 раза.
Что такое электронная система стабилизации?
Система курсовой устойчивости ESC (Electronic Stability Control) помогает водителю избежать заносов и улучшает проходимость автомобиля. При торможении срабатывание системы ESC может восприниматься в виде пульсирующего звука.
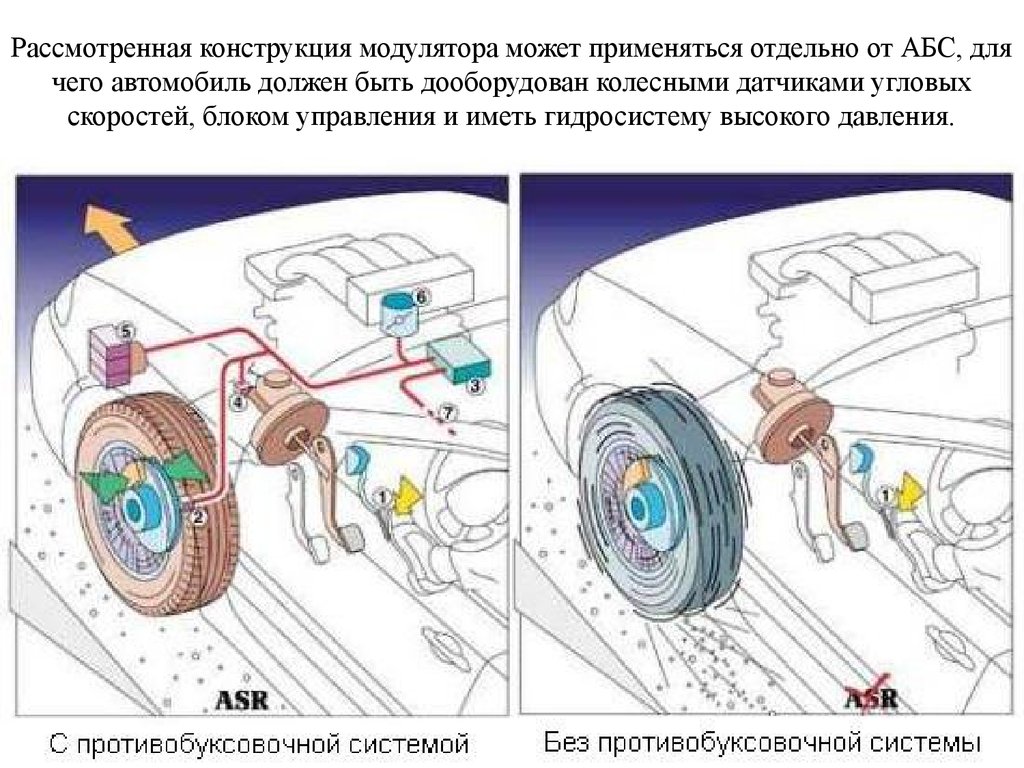
Как работает система TCS?
Принцип работы TCS
Общий принцип работы Traction Control System довольно прост: датчики, входящие в состав системы, регистрируют положение колес, их угловую скорость и степень проскальзывания. Как только одно из колес начинает пробуксовывать, TCS моментально устраняет потерю сцепления с дорожным покрытием.
Как только одно из колес начинает пробуксовывать, TCS моментально устраняет потерю сцепления с дорожным покрытием.
Как работает кнопка Антиюз?
Функция антиюз включена автоматически, на панели индикатор не горит. Когда машина срывается в занос, то тогда она срабатывает и на панели мигает индикатор и раздается звуковой сигнал ( по крайней мере у меня так). Если нажать на кнопку, то на панели загорается индикатор и эта функция отключается.
Система курсовой устойчивости ESP — Что это такое, как работает?
Автор Servicing-Auto На чтение 8 мин Просмотров 110 Опубликовано
Изначально, система курсовой устойчивости была разработана на основе автомобильной системы, которая отвечала за предотвращение блокировки тормозов. С одной стороны, перед нами элемент, тесно связанный с АБС, однако, большая часть компонентов уникальны. Речь идет о датчике, отвечающем за то, в каком положении находится акселерометр и руль. Также курсовая устойчивость невозможна без контроля реальных поворотов машины. Таким образом, когда появляется расхождение в показаниях сразу нескольких датчиков, работающих с акселерометром и рулем, система незамедлительно в автоматическом режиме осуществляет торможение, которое предотвращает заносы. Торможение может, в зависимости от несоответствия показателей датчиков, может срабатывать, как на всех колесах автомобиля, так и на каждом из них по отдельности.
Также курсовая устойчивость невозможна без контроля реальных поворотов машины. Таким образом, когда появляется расхождение в показаниях сразу нескольких датчиков, работающих с акселерометром и рулем, система незамедлительно в автоматическом режиме осуществляет торможение, которое предотвращает заносы. Торможение может, в зависимости от несоответствия показателей датчиков, может срабатывать, как на всех колесах автомобиля, так и на каждом из них по отдельности.
Если точнее, то такие системы предназначены для опасных ситуаций, когда водитель уже не может управлять автомобилем. В большинстве случаев, ESP способна предугадывать возможность потери управления, притормаживая и стабилизируя колеса на дороге. К примеру, если вы будете заходить в поворот на слишком большой скорости, колеса начнут уходить с нормальной траектории. В этот момент в работу и вступит СКУ, притормаживая, и давая возможность автомобилю снова вернуться на безопасную траекторию, при этом, увеличивая шанс водителя сохранить контроль управления и колесами, и рулем. Самое важное – система работает всегда, вне зависимости от скорости и оборотов двигателя в критический момент.
Самое важное – система работает всегда, вне зависимости от скорости и оборотов двигателя в критический момент.
Сегодня принято считать, что система курсовой устойчивости ESP – лучшая система безопасности для современных автомобилей. Главное преимущество заключается в ее способности компенсировать низкий уровень вождения человека и нейтрализовать заносы. В то же время, панацеей использование СКУ назвать нельзя. Маленький радиус поворота или слишком большая скорость не станут причиной поломки системы, но ей может понадобиться слишком много времени для оценки ситуации и расчетов, что, в итоге, все же приведет к потере управления.
Содержание
- Система ESP – стабилизация вашего автомобиля
- История ESP
- Как работает система курсового контроля
- Когда можно отключить систему контроля курса ESP
Система ESP – стабилизация вашего автомобиля
Как вы поняли, система курсовой устойчивости ESP – это наиболее популярное и известное среди автомобилистов название одной из важнейших систем безопасности современных транспортных средств. Установка ESP приводит к динамической стабилизации машины в критические моменты, когда водитель, либо уже потерял управление, либо находится в состоянии его потери. Разные производители по-разному называют такие системы, устанавливая их на свои автомобили. Сегодня мы знаем о таких аббревиатурах, как VDC, DSC, ESC и других. По сути, все они одинаковы (не считая разных характеристик) и занимаются одним и тем же – электроника работает для того, чтобы в моменты опасности максимально стабилизировать автомобиль и позволить водителю вернуть себе контроль над колесами, сцеплением с дорогой и рулем.
Установка ESP приводит к динамической стабилизации машины в критические моменты, когда водитель, либо уже потерял управление, либо находится в состоянии его потери. Разные производители по-разному называют такие системы, устанавливая их на свои автомобили. Сегодня мы знаем о таких аббревиатурах, как VDC, DSC, ESC и других. По сути, все они одинаковы (не считая разных характеристик) и занимаются одним и тем же – электроника работает для того, чтобы в моменты опасности максимально стабилизировать автомобиль и позволить водителю вернуть себе контроль над колесами, сцеплением с дорогой и рулем.
Первостепенная обязанность таких систем, контроль поперечной динамики транспортного средства и своевременная помощь водителю, когда он уже не в состоянии им управлять. Система курсовой устойчивости предотвращает любую опасность сильных заносов или скольжения на любых скоростях. То есть, как и значится в названии, речь о курсовой устойчивости. Но, не только в ней, так как ESP активно следит и за нормальной траекторией движения автомобиля, и за стабильностью сцепления. Сегодня большинство систем СКУ способны срабатывать на любых скоростях, правда, для этого производителям приходится дорабатывать базовые системы с учетом скоростных и маневренных характеристик автомобиля, на которые их нужно устанавливать.
Сегодня большинство систем СКУ способны срабатывать на любых скоростях, правда, для этого производителям приходится дорабатывать базовые системы с учетом скоростных и маневренных характеристик автомобиля, на которые их нужно устанавливать.
История ESP
Можно сказать, что самым первым элементов в автомобиле, который следил за его стабилизацией на дороге, было «Устройство управления», которое еще в середине прошлого века (1959 год) запатентовала крупная компания Даимлер-Бенц. К сожалению, учитывая технические способности того времени, реально воплотить в жизнь возможность автономной корректировки курса автомобиля в опасных ситуациях не получилось. Первая рабочая система, способная стабилизировать автомобиль появилась не так давно – в 1994 году. Уже через год после показа первого прототипа, система курсового управления начала ставиться на серийную модель Мерседеса – CL 600. Еще через пару лет она стала неотъемлемой частью электроники всех автомобилей марки Mersedes-Benz S и SL класса.
Сегодня все намного проще. Практически каждый автомобиль может быть оснащен такой системой. Правда, в большинстве случаев придется выбирать установку ESP в качестве дополнительной опции, которая оплачивается отдельно. К тому же, вне зависимости от того, какого класса машину вы выбрали, установить систему контроля все равно получится. К примеру, посмотрите на относительно дешевые и популярные бюджетные автомобили от Ford или Wolkswagen. Да что там говорить, даже Fiat 500, который считается лучшим «бюджетником» Великобритании, сегодня имеет в базовой комплектации систему ESP.
Как работает система курсового контроля
Нынешние виды ESP неразрывно связаны с системами ABS. К тому же, представить себе работу такой электроники без соединения с системами антипробуксовки и управления двигателем автомобиля практически невозможно. Проще говоря, EPS активно использует в работе сразу несколько компонентов нескольких важных систем автомобиля. Получается, что при установке системы контроля курса, вы оборудуете свой автомобиль целым комплексом аварийных систем, которые будут контролировать элементы самых важных компонентов «железа», отвечающего за движение и управление на дороге. По своей структуре, СКУ — много различных датчиков и контроллеры, позволяющие считывать данные характеристик движения автомобиля из нужных систем, после чего, по надобности, управлять этими системами, чтобы вернуть транспортному средству устойчивость и управляемость.
По своей структуре, СКУ — много различных датчиков и контроллеры, позволяющие считывать данные характеристик движения автомобиля из нужных систем, после чего, по надобности, управлять этими системами, чтобы вернуть транспортному средству устойчивость и управляемость.
Однако, самую важную часть работы ESP-систем обеспечивают всего два элемент – датчик угловой скорости автомобиля, который рассчитывает ее в отношении вертикальной оси, и G-сенсор, отвечающий за поперечное ускорение. Два этих датчика работают в связке с системой контроля, показывая, когда автомобиль находится в состоянии скольжения в бок и полностью определяет, насколько это скольжение сильное и опасное. Исходя из полученных данных, в течение долей секунды, датчики передают всю информацию ESP, которая, в свою очередь, распоряжается этими данными на свое усмотрение. В целом, система отлично понимает, насколько сильно водитель выворачивает руль, как быстро двигается автомобиль, опасен ли занос и требуется ли включение аварийной электроники, которая частично берет управление на себя, предотвращая аварию и обеспечивая наилучший выход из сложившейся опасной ситуации.
Еще одна уникальная особенность ESP, благодаря связи с основными датчиками ходовой части авто, в реальном времени сравнивать те данные, что показывают датчики, с фактическим поведением машины во время движения по дороге. Если упростить, то система определяет, отличается ли поведение авто от расчетных данных. Если отличие настолько большое (речь идет даже о долях секунды), что данные расходятся сильно, система контроля самостоятельно производит все нужные корректировки, возвращая фактические показатели скорости и стабильности автомобиля в пределы нормы, таким образом, предотвращая аварийную ситуацию, которая может закончиться аварией и смертью водителя.
Как мы уже писали выше, предотвращение опасных ситуаций происходит за счет частичного или в некоторых случаях полного автоматического управления колесами, тормозами и рулем. Чтобы расчетный курс вернулся к норме, ESP может подтормаживать каким-то отдельным колесом или сразу всеми. Какому колесу нужно подправить обороты, система способна определять самостоятельно, основываясь на показаниях всех доступных датчиков от других систем автомобиля. При этом торможение производится с помощью связки сразу нескольких систем – АБС по команде ESP регулирует давление в тормозах, двигатель снижает подачу топлива и уменьшает обороты колес. Так мы получаем максимально быстрый и эффективный способ электроники самостоятельно решать проблемы, которые не способен (или просто не успевает) решить водитель.
При этом торможение производится с помощью связки сразу нескольких систем – АБС по команде ESP регулирует давление в тормозах, двигатель снижает подачу топлива и уменьшает обороты колес. Так мы получаем максимально быстрый и эффективный способ электроники самостоятельно решать проблемы, которые не способен (или просто не успевает) решить водитель.
Когда можно отключить систему контроля курса ESP
Несмотря на свою полезность, очень многие считают, что ESP, по сути, опытным водителям только мешает. Те, кто привыкли «выжимать» из своего автомобиля буквально все до последней капли, просто не нуждаются в «подстраховщике», который в отдельные моменты начинает вмешиваться в управление. В некоторых случаях, когда речь идет о действительно сложном и виртуозном вождении, система, позволяющая предотвращать аварии в 95% случаев потери контроля водителем, может сыграть с вами злую шутку и стать катализатором опасной ситуации.
Но, и это производители предусмотрели. Сегодня, даже при базовой установке ESP-систем, существует возможность их отключать самостоятельно. Некоторые автомобили оснащены электроникой, которая может работать в нескольких режимах – полная безопасность и контроль движения или допуск легкого скольжения и заносов. То есть, выставляя контроль на средний уровень, можно немного «похулиганить» на трассе, помня, что при действительно серьезной проблеме с управлением, EPS быстро все подправит и вернет вам контроль над автомобилем.
В итоге, система курсового контроля ESP – уникальная вещь, способная спасти вам жизнь. Но, не нужно забывать о том, что физику пока никому из нас обмануть не удалось – возможности любой из систем контроля курса вовсе не безграничны.
Чем отличаются автомобильные системы стабилизации ESP и ESC
Особенности автомобильных систем ESP и ESC
Каждый новый автомобиль, проданный в Европе с 2014, должен быть оснащён электронной системой стабилизации, но далеко не все автовладельцы знают, чем отличаются ESP и ESC, а также на что влияет выбранный вариант.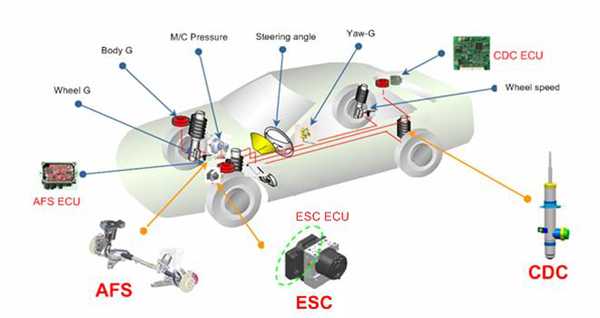
Смотрите также: Что такое система векторизации крутящего момента и как она работает?
ESC (или ESP) многими рассматривается как одно из величайших достижений в области автомобильной безопасности и автоспорта в частности. Принципиальное отличие системы стабилизации от таких традиционных элементов пассивной безопасности как ремни и подушки заключается в том, что они предназначены для спасения жизни, а также сохранения здоровья водителя и пассажира при аварии, а вот ESC (или ESP) используются для предотвращения ДТП.
Для справки, ESC расшифровывается как Electronic Stability Control (Электронный Контроль Устойчивости), а ESP – Electronic Stability Program (Электронная Программа Стабилизации). Фактически, цели у обеих совпадают, а исследования и проверка опытным путём наглядно доказывают их эффективность. По мнению британских специалистов, которые основывались на статистических данных, оснащение автомобиля ESP помогает снизить риски серьёзного транспортного происшествия на 25%. В то же время шведские исследователи склонны полагать, что данная система активной безопасности помогает на 35% уменьшить вероятность попадания в аварию со смертельным исходом при плохих погодных условиях.
Это мрачная перспектива, которая, тем не менее, должна подвергаться тщательному анализу, именно поэтому в Европе на законодательном уровне закрепили обязательное оснащение всех новых автомобилей ESP. Такая инициатива была реализована в 2014 году, до этого момента столь важная система входила лишь в список дополнительного оборудования, доступного достаточно дорогим моделям. При этом прообраз данной электронной системы был запатентован ещё в 1959 году, а реализовать её на массовой серийной модели удалось только к 1994 году.
Как работают ESP и ESC
При таком количестве электронных систем, устанавливаемых в автомобиле, каждая из которых имеет собственную аббревиатуру, многие автовладельцы совершенно не понимают, в чём заключается принципиальное отличие между ними. Ещё больше усложняет ситуацию то, что для обозначения близких по назначению средств активной безопасности используются разные названия, которые в большинстве случаев определяются самим производителем.
Так, ESP (Electronic Stability Program) может быть известна как ESC (Electronic Stability Control), VSC (Контроль Устойчивости Автомобиля или система курсовой устойчивости), VSA (Vehicle Stability Assist – Система Курсовой Стабилизации) или DSC (Dynamic Stability Control – Система Динамического Контроля Устойчивости). Некоторые автопроизводители используют собственные «бренды» для продвижения ESP, поэтому вы можете столкнуться, например, с DSTC (Dynamic Stability and Traction Control) от Volvo или PMS (Porsche Stability Management) от Porsche.
Итак, теперь мы определились с возможными вариантами названий, давайте посмотрим, как работает ESP.
Добавление третьего элемента безопасности к ABS и противобуксовочной системе
Для того, чтобы появилась возможность оснащения вашего автомобиля системой ESP, он должен быть оборудован ABS (антиблокировочная тормозная система) и TCS (Traction Control System – противобуксовочная система) В простейшем случае два этих элемента активной безопасности предназначены для того, чтобы улучшить управляемость и предсказуемость, а также сохранять контроль над автомобилем при торможении и ускорении соответственно, поэтому их вмешательство в процесс управления сводится лишь к контролю линейного ускорения.
ESP дополняет их и вносит третье контролируемое измерение, поскольку она отвечает за перемещение автомобиля в перпендикулярном траектории движения направлении, в котором и возникают такие явления как недостаточная или избыточная поворачиваемость – занос. В более продвинутых версиях она находится в постоянном взаимодействии и с электронным блоком управления двигателем, чтобы максимально повысить эффективность своей работы.
Согласно статистическим данным, ESP может предотвратить до 80% заносов, что является отличным показателем, особенно на фоне того, что около 40% аварий происходит именно из-за этого явления. Тем не менее, стоит вспомнить слова Скотти из фильма Стартрек: «Вы можете изменить законы физики!». Конечно, возможности систем активной безопасности не безграничны и об этом не стоит забывать. Если водитель перешагнёт тот рубеж, когда потеря контроля над автомобилем неизбежна, ни одна из существующих ныне систем не позволит предотвратить серьёзные последствия.
Дополнительная устойчивость при повороте с ESC
Поскольку ESP обеспечивает дополнительную безопасность наряду с ABS и TCS, вас вряд ли удивит тот факт, что она использует большую часть оборудования из этих систем для работы. Используя датчики для измерения скорости отдельных колес, а также информацию от датчиков бокового ускорения и датчиков поперечной скорости, блок управления ESP постоянно контролирует боковые движения автомобиля и сопоставляет их с положением рулевого колеса. Если машина не отреагирует на движение руля так, как это запрограммировано, или заданный угол поворота, а также скорость слишком велики, ESP начнёт подтормаживать колёса, пытаясь сохранить прямолинейную траекторию движения. При этом торможение осуществляется при активном взаимодействии с ABS, что исключает блокировку одного из колёс. Сама суть работы рассматриваемой системы заключается в том, чтобы начать активно содействовать процессу управления машиной ещё до того момента, как водитель поймёт, что начинает терять контроль.
Система работает постоянно, вне зависимости от режима езды, и даже при движении накатом. А механизм её влияния полностью зависит от ситуации и конструктивных особенностей автомобиля. Например, если в резком повороте фиксируется начало проскальзывания задней оси, то электроника начинает плавно снижать количество подаваемого в двигатель топлива, обеспечивая снижение его оборотов. Если же и этого оказывается недостаточно, то начинается постепенное подтормаживание передних колёс. Если же автомобиль оснащён автоматической трансмиссией, то ESP позволяет принудительно активировать зимний режим работы, обеспечивая возможность перехода на пониженную передачу.
Дополнительные преимущества ESC
Поскольку ESC способен тормозить колеса автомобиля независимо от нажатия педали, она открывает огромный потенциал для реализации и внедрения других различных технологий безопасности. К ним можно отнести и достаточно известную ныне Brake Assist, предназначенную для сокращения тормозного пути, которая распознаёт ситуацию экстренного торможения и оказывает необходимое содействие водителю. А также Hill Hold Control, суть которого заключается в помощи при трогании в гору путём подтормаживания колёс на пару секунд после отпускания педали, чтобы предотвратить откатывание назад. Всё это ещё на несколько шагов приближает тот момент, когда электроника полностью заменит водителя.
Смотрите также: Технологии которые появились на авторынке благодаря Mercedes S-классу
Коммерческие автомобили, оснащенные ESC, могут иметь дополнительные датчики, которые измеряют вес и положение груза, и соответственно адаптировать поведение автомобиля под конкретные условия. Это повышает степень участия ESC в управлении автомобилем, поскольку в этом случае появляется даже возможность контроля над сдвигом груза при резком повороте. Данная система также обеспечивает дешевый и эффективный мониторинг давления в шинах, поскольку она измеряет скорость каждого отдельного колеса и может определить, снизилось ли давление в шине, поскольку это повлияет на скорость её вращения.
Помимо этого, не стоит забывать и о том, что данная электронная система позволяет ощутимо снизить показатель среднего расхода топлива за счёт оптимизации режимов работы двигателя и предотвращения затрат энергии при проскальзывании одной из осей. Конечно, обилие электроники существенно усложняет конструкцию автомобиля, повышает его стоимость и приводит к необходимости высококвалифицированного сервисного обслуживания, однако, как показывает история, массовое внедрение какой-либо технологии автоматически приводит к постепенному снижению её цены.
Конечно, обилие электроники существенно усложняет конструкцию автомобиля, повышает его стоимость и приводит к необходимости высококвалифицированного сервисного обслуживания, однако, как показывает история, массовое внедрение какой-либо технологии автоматически приводит к постепенному снижению её цены.
В ряде случаев при неоднородном покрытии (например, крупном щебне) или при движении с малой скоростью по сыпучему песку эта система оказывается неэффективна и даже негативно влияет на параметры работы автомобиля. Поэтому большинство автомобильных инженеров сходится во мнении, что такая полезная опция всё ещё нуждается в доработке, а пока необходимо предусмотреть возможность её деактивации, особенно на спортивных моделях и внедорожниках. Например, VSC от Toyota начинает работать только при достижении скорости 15 км/час.
Смотрите также: Силовое подруливание на переднеприводных машинах, способы решить проблему
Подводя итог, можно сказать, что ESP в различных вариациях исполнения предназначена для исправления ошибок недостаточно опытного водителя, чтобы предотвратить катастрофические последствия. Однако для тех, кто предпочитает активную езду и обладает для этого достаточными навыками, электроника снижает удовольствие от вождения, поскольку не позволяет довести ситуацию до критической грани, на которой и достигается управляемый занос, дрифт, прохождение поворотов «веером» и многое другое.
Именно поэтому на ряде моделей, особенно спортивных автомобилей, предусмотрена возможность настройки параметров под индивидуальные особенности владельца и даже отключения этой функции.
Автор: Сергей Василенков
Система курсовой стабилизации — описание и принцип работы
В большинстве стран, система курсовой стабилизации ESP стала обязательным компонентом пассажирских автомобилей. Исходя из этого, можно говорить, что ESP является важной частью систем обеспечивающих безопасность на дороге. Давайте посмотрим, чем хороша система динамической стабилизации и вкратце разберем, как она работает.
Оглавление:
Зачем это нужно?Как это работает?Названий много – суть однаБойся опытного водителя
Зачем это нужно?
Для ответа на вопрос, зачем нужна динамическая стабилизация, давайте сначала выясним, каким образом автомобиль уходит в занос.
Поворот это довольно опасный участок дороги, на котором могут произойти всякие неприятности. Особенно если это закрытый поворот, и вы не видите, кто движется вам на встречу. Но сейчас речь не о том.
Зачем нужна машине курсовая устойчивость
Для успешного прохождения поворота вы, в качестве водителя, немного снижаете скорость, поворачиваете руль и машина начинает движение в соответствии с углом на который вы повернули рулевое колесо.
Пока что всё идёт нормально. Но что случится, если вы не снизите скорость? Или более того, увеличите её при входе в поворот.
При движении по кривой, на автомобиль действует, кроме прочих, центробежная сила. И в тот момент, когда эта сила станет больше чем все остальные силы, в том числе сила трения колес с дорогой, автомобиль начинает заносить.
Немного простой физики: центробежная сила это сила, которая действует от центра окружности, наружу (Очень приблизительная формулировка, так как суть статьи не в этом).
Так вот, система курсовой устойчивости ESP создана для того что бы ни допустить ситуации, когда ваша машина уходит в занос, а значит становится практически не управляемой, что может привести к самым тяжёлым последствиям.
Как это работает?
Принцип работы системы динамической стабилизации ESP основан на постоянном наблюдении за информацией, получаемой с датчиков скорости, разнице между углом отклонения автомобиля и поворотом руля, а также прочих показателях. На основе получаемой информации, компьютер, который является основой управления курсовой устойчивостью, решает всё ли хорошо, или уже надо вмешаться и исправлять ситуацию.
Динамическая стабилизация ESP работает вместе с антиблокировочной системой ABS, о которой мы рассказывали ранее. ESP использует датчики скорости, которыми пользуется АБС, а также, возможности системы торможения для быстрой реакции на изменяющуюся обстановку.
Основной причиной вымешивания системы курсовой устойчивости ESP в управление автомобилем, является разница между углом поворота руля и углом отклонения машины. Этот показатель, говорит о том, произошёл занос или нет.
Этот показатель, говорит о том, произошёл занос или нет.
Как же динамическая стабилизация исправляет ситуацию? Это происходит путём уменьшения скорости вращения определённых колёс, в зависимости от того как и в какую сторону заносит ваш автомобиль. Кроме того уменьшается общая скорость транспортного средства. Таким образом, машина возвращается к первоначальной траектории движения и все остаются целыми, невредимыми и с уравновешенной нервной системой.
Чаще всего водитель даже не замечает того что его машина должна была сорваться в занос, потому как система курсовой устойчивости ESP очень быстро реагирует на ситуацию. Считывание информации со всех датчиков происходит 50 раз в секунду, так что реакция на изменение действительно очень быстрая.
Названий много – суть одна
Траектория движения машины с ESP и без
Основной и самый значительный производитель аппаратуры для курсовой стабилизации — компания Bosch, и как раз их продукт называется ESC – electronic stability control. Но в нашем мире не бывает бесконкурентного производства, и потому существует ещё несколько компаний производящих такое же оборудование, но под другими названиями.
Но в нашем мире не бывает бесконкурентного производства, и потому существует ещё несколько компаний производящих такое же оборудование, но под другими названиями.
Так же и автопроизводители различных марок машин устанавливают эти механизмы, давая им разные названия. Ниже мы предоставим вам таблицу, кратко сопоставляющую автомобили и названия, установленных в них систем курсовой стабилизации.
У всех них один и тот же принцип работы, и таблица поможет вам не путаться в обилии слов означающих одно и то же.
| Имя системы курсовой устойчивости | Марки автомобилей |
|---|---|
| ESP | Audi, Bentley, Bugatti, Chery, Chrysler, Citroen, Dodge, Diamler, Fiat, Holden, Hyundai, Jeep, Kia, Seat, Skoda, Mercedes Benz, Opel, Peugeot, Proton, Renault, Saab, Scania, Smart, Suzuki, Vauxhall, Volkswagen |
| ASC, ASTC | Mitsubishi, BMW |
| ESC | Chevrolet, Hyundai, Kia Skoda, Lada |
| VDC | Alfa Romeo, Fiat, Subaru, Nissan |
| VSA | Acura, Hyundai, Honda |
| MSP | Maserati |
| CST | Ferrari |
| DSTC | Volvo |
| PSM | Porsche |
| VDIM, VSC | Toyota, Lexus |
| RSC | Ford |
| DSC | BMW, Jaguar, Land Rover, Mazda, Mini, Ford – только для австралийского рынка |
Это относительно краткий перечень, на самом деле разновидностей названий систем обеспечивающих курсовую устойчивость, гораздо больше. Но в главном они пересекаются — это работа для того что бы избежать критических ситуаций и сохранить безопасность водителя и пассажиров в неприкосновенности.
Но в главном они пересекаются — это работа для того что бы избежать критических ситуаций и сохранить безопасность водителя и пассажиров в неприкосновенности.
Бойся опытного водителя
В обычных режимах вождения, ESP работает постоянно, не имеет значения, на какой скорости и, по какой дороге вы едите.
Отключение ESP может привести к неуправляемому заносу
Однако для любителей дорожного экстрима существует кнопка отключения стабилизации вашей машины. Правда, такую функцию производители добавляют не во всех моделях. Например, в машинах бизнес класса, чаще всего динамическая стабилизация не отключается.
Смысл отключения курсовой устойчивости в том, что опытный водитель может, для собственного удовольствия, создать контролируемый занос авто или при выходе из поворота дать газу, что приведёт к небольшому заносу задних колёс.
При включённой системе курсовой устойчивости, сделать такое не представляется возможным, так как электроника пресечёт эти попытки на самой первоначальной стадии.
Но все мы люди и все могут ошибаться, и потому отключая курсовую устойчивость, вы берёте на себя всю ответственность за риск. Причём это не только риск для вас, но и опасность для других участников движения.
Опубликовано: Июль 2, 2014
Как работает система курсовой устойчивости в экстремальной ситуации
Содержание статьи
- Актуальные синонимы
- Где и как можно купить легковой прицеп и какой выбрать
- Как это работает
- Как правильно уступить дорогу пешеходам на перекрестках
- Способы стабилизации
Всем привет! На обсуждении у нас сегодня система курсовой устойчивости. Предлагаю поговорить о том, что это такое, для чего нужно, как работает и насколько сильно помогает в экстренных ситуациях.
Система имеет множество названий, в зависимости от автопроизводителей. Но суть везде одна. Она предназначена для обеспечения автоматического изменения, а точнее для корректировки, курсового положения транспортного средства в условиях, когда его начинает заносить.
Если говорить просто, то дополнительная электроника в машине позволяет при совершении маневра не выехать на встречную полосу и не оказаться в кювете. А ведь это сделать не так сложно, если на мокрой или скользкой дороге на высокой скорости выкрутить рулевое колесо.
У системы курсовой устойчивости (СКУ) богатая история, которая насчитывает около 20 лет. За это время электронная начинка улучшалась и модернизировалась. В итоге, как гласит Википедия, установка СКУ теперь предусмотрена практически на каждой машине. Для новых авто это обязательное требование. И если ваша машина выпущена недавно, вряд ли даже стоит проверять, есть ли там ESP. А вопрос о том, нужна ли она, вообще не поддается сомнению. Точно нужна. И я постараюсь объяснить, почему именно.
Актуальные синонимы
Система стабилизации есть практически на всех авто. Это мы уже определили. Идентифицировать наличие СКУ можно по специальному значку приборной панели, который горит при активации. Хотя возможна ошибка, и тогда лампа не горит вовсе, либо горит постоянно. Это уже другой вопрос.
Это уже другой вопрос.
Система поддержания курсовой устойчивости пригодится для любого автомобиля. Мы разобрались уже, что такое СКУ и для чего она нужна. Подобная динамическая система курсовой устойчивости может быть установлена на:
- Киа Рио;
- Форд Фокус 3;
- Тойота Камри 40;
- Toyota Corolla;
- Лада Веста;
- Лада Гранта;
- Рено Дастер;
- Ниссан Кашкай;
- Шкода Фабия;
- Митсубиси Лансер и пр.
Интересен и тот факт, что довольно часто автомобилисты заявляют об отсутствии ESP, несмотря на соответствующий значок, загорающийся на приборной панели.
Здесь есть доля юмора. Надеюсь, вы поймете. Вместо ESP, как утверждают некоторые водители, у них стоит система VSC. Есть и те, у которых ESP заменили системой под названием DCS. Якобы она еще лучше стандартной СКУ. И такие отзывы в сети найти не составит большого труда.
Давайте по факту. Все озвученные аббревиатуры относятся к одной и той же системе. Просто именно ESP является самой популярной и распространенной. Ее использует большинство автопроизводителей из Европы и США.
Просто именно ESP является самой популярной и распространенной. Ее использует большинство автопроизводителей из Европы и США.
Хотя стоит отметить, что на некоторых авто встречается другой значок, отвечающий за систему контроля курсовой устойчивости. Это не более чем синонимы. Но знать о них нужно, дабы не паниковать, что вас лишили ESP. Она наверняка есть, только под другим названием.
- ESC. Та же система, только называется несколько иначе. Такое понятие принято использовать корейскими автопроизводителями в лице Хендай и Киа, а еще японской фирмой Хонда;
- DSC. Такое обозначение динамического стабилизатора вы увидите на автомобилях производства БМВ, Лэнд Ровер и Ягуар;
- DTSC. Свое собственное обозначение, отличное от других фирм, используют в некогда полностью шведской компании Вольво;
- Также некоторые модели Хонда и Акура используют в качестве названия СКУ аббревиатура VSA;
- Автомобили, выпускаемые под маркой Тойота, ESP не лишены. Только называется она у японцев VSC;
- Если вы встретили название VDC, то наверняка у вас что-нибудь из модельного ряда Субару, Ниссан или Инфинити.

Вне зависимости от названия, суть везде остается одной и той же.
Нельзя не отметить, что на некоторых машинах стоят более совершенные и улучшенные системы стабилизации. Это уже вопрос к нововведениям и повышению уровня безопасности.
Как это работает
Когда машину заносит в сторону при повороте, это не неисправность, а естественное поведение автомобиля, обусловленное законами физики. Потому каждый должен знать, что совершать маневры на высокой скорости очень опасно. Вращая руль в одну сторону, вас понесет в совершенно другую.
Главной задачей СКУ является предотвращение срыва машины в заносы или скольжения. Это происходит путем изменения момента вращения на одной из колес, которое относится к ведущим. За счет такой работы дальнейший занос предотвращается, машина возвращается в стабильное положение, маневр идет по плану. И тут дело не в мастерстве самого водителя, поскольку многие новички совершают одни и те же ошибки, банально не сбрасывая скорость перед поворотом.
Стоит понимать, что СКУ имеет огромное количество датчиков, которые определяют положение, скорость движения, развороты руля и многие другие параметры. Потому контроллер постоянно получает большое количество информации, которая анализируется и передается на органы управления. Тем самым удается быстро корректировать работу ведущих колес и тормозных цилиндров.
Экстремальной ситуацией можно считать занос при разгоне, во время наката или торможения на скользкой дороге. Подобное чаще происходит зимой, но также возможно при наличии небольшой лужи на дороге. Она провоцирует аквапланинг, водитель теряет частично управление. За счет системы стабилизации зачастую удается вернуться в исходное положение, продолжив движение по заданной траектории.
Приведем пример. Машина поворачивает влево на высокой скорости, и ее начинает заносить. В это мгновение активируется датчик заноса, что заставляет сократить подачу топлива и снизить скорость. Если это не помогает, СКУ автоматически подтормаживает правое заднее колесо. Система прекрасно адаптирована под работу на автомобилях со всеми видами коробок передач.
Способы стабилизации
Так уж произошло, что водитель частично потерял управление, либо выехал на скользкий участок дороги. Тут система начинает автоматически реагировать и воспринимать ситуацию как аварийную. Для этого производится анализ действий водителя и реальные параметры движения. Если намерения автомобилиста не совпадают с движением машины, ESP на это реагирует и включается в работу.
Есть несколько способов, с помощью которых удается достичь стабилизации:
- подтормаживание определенными колесами;
- изменение параметров крутящего момента;
- изменения в работе двигателя;
- внесение изменений в тормозные цилиндры;
- корректировка углов поворота передних колес;
- изменение демпфирования колесных амортизаторов;
- иные методы разных автопроизводителей.
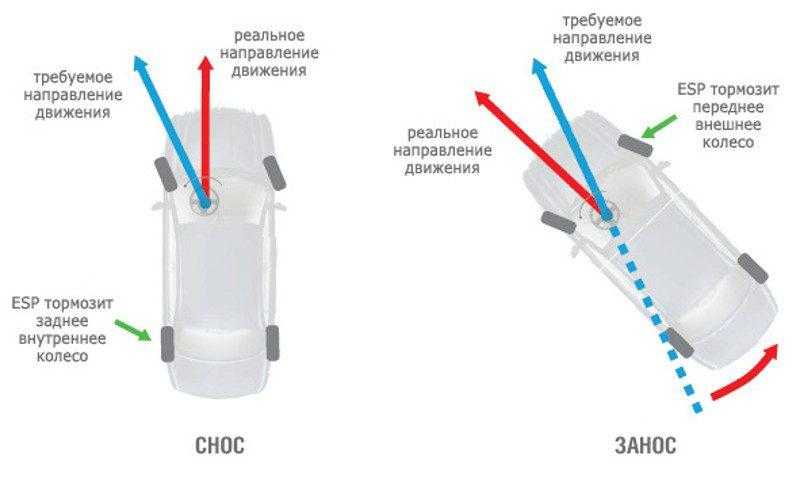
Если система фиксирует недостаточную поворачиваемость, она не дает машине уйти в сторону за пределы заданной траектории. Для этого происходит подтормаживание внутреннего колеса и меняется текущий крутящий момент без участия самого водителя.
Для этого происходит подтормаживание внутреннего колеса и меняется текущий крутящий момент без участия самого водителя.
Если поворачиваемость недостаточная, чтобы предотвратить занос транспортного средства происходит подтормаживание уже наружного переднего колеса. Также корректируется крутящий момент. Чтобы подтормозить колеса, электроника запускает в работу дополнительные системы безопасности. Функционирует все по циклическому принципу. То есть повышается давление, удерживается давление или сбрасывается. Аналогично корректируется крутящий момент. Здесь активируется дроссельная заслонка, меняется пропуск в системы впрыска топлива, отменяется переключение передачи на автомате, пропускаются импульсы зажигания и пр.
Не скрою, что иногда СКУ срабатывает тогда, когда это не нужно. В результате водитель не может набрать быстро скорость или совершить иные безопасные маневры, поскольку электроника воспринимает их как угрозу. Потому на многих авто есть кнопка, решающая проблему того, как отключить систему.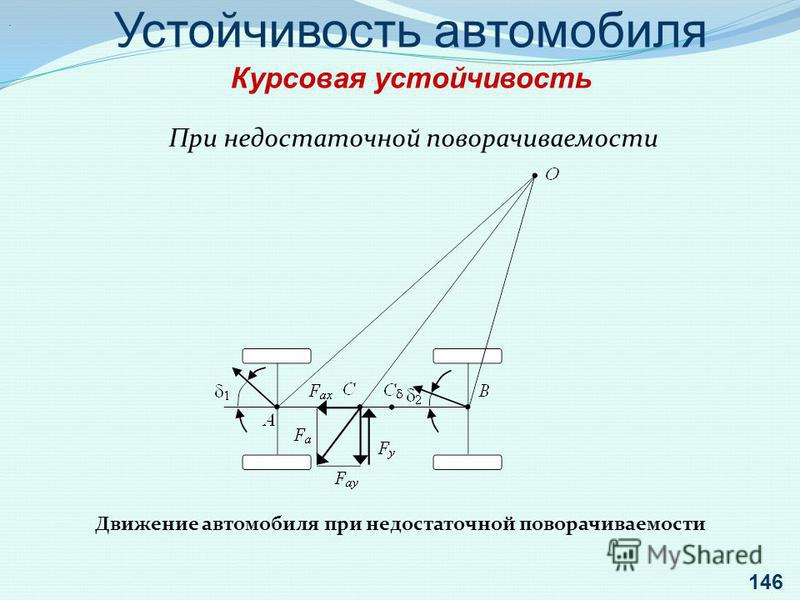 Злоупотреблять отключение ESP я не советую. В сети много примеров видео, где ESP не работало, и к чему это привело.
Злоупотреблять отключение ESP я не советую. В сети много примеров видео, где ESP не работало, и к чему это привело.
А на этом у меня все. Спасибо всем, кто с нами!
Подписывайтесь, оставляйте комментарии и задавайте вопросы!
Watch this video on YouTube
Система курсовой устойчивости
Авто схемы
admin Send an email 04.12.2013
0 454 3 минут
Понятие и принцип работы системы динамической стабилизации автомобиля на дороге. Суть данной технологии и дополнительные функции.
Второе название данной системы курсовой устойчивости (СКУ) – система динамической стабилизации или третье — электронный контроль устойчивости (ЭКУ), на английском звучит как Electronic Stability Control (ESC).
Необходимо отметить, что данная технология предназначена для осуществления сохранения устойчивости во время движения автомобиля, а также управляемости машины, благодаря благовременному определению, а также устранению критической ситуации. Начиная с 2011 года в США, Канаде и странах Евросоюза является обязательным условием, оснащение новых легковых автомобилей системой курсовой устойчивости.
Начиная с 2011 года в США, Канаде и странах Евросоюза является обязательным условием, оснащение новых легковых автомобилей системой курсовой устойчивости.
Суть курсовой устойчивости
Она обеспечивает удерживание автомобиля в рамках заданной водителем траектории, в различных режимах движения транспортного средства. Такими режимами является свободное качение, повороты, движение по прямой, торможение и разгон.
Курсовая устойчивость в зависимости от производителя имеет следующие названия:
- VDC (Vehicle Dynamic Control) — Subaru, Infiniti, Nissan;
- VSC (Vehicle Stability Control) — Toyota;
- VSA (Vehicle Stability Assist) — Honda, Acura;
- DTSC (Dynamic Stability Traction Control) — Volvo;
- DSC (Dynamic Stability Control) у автомобилей Rover, BMW, Jaguar;
- ESC (Electronic Stability Control) — Hyundai, Honda, Kia;
- ESP (Electronic Stability Program) у большинства автомобилей Америки, а также Европы.
Видео о том, как работает система стабилизации движения VSC
Её принцип действия и устройство действия можем рассмотреть на примере одной из самых распространенных систем ESP, выпускаемой с 1995 г.
Устройство динамической стабилизации
Она представляет сбой систему активной безопасности, обладающая высоким уровнем.
В неё входят:
- ASR — антипробуксовка;
- EBD — распределение тормозных усилий;
- ABS — антиблокировка тормозов.
- EDS — электронная блокировка дифференциала;
Устройство:
- гидравлический блок;
- блок управления;
- входные датчики.
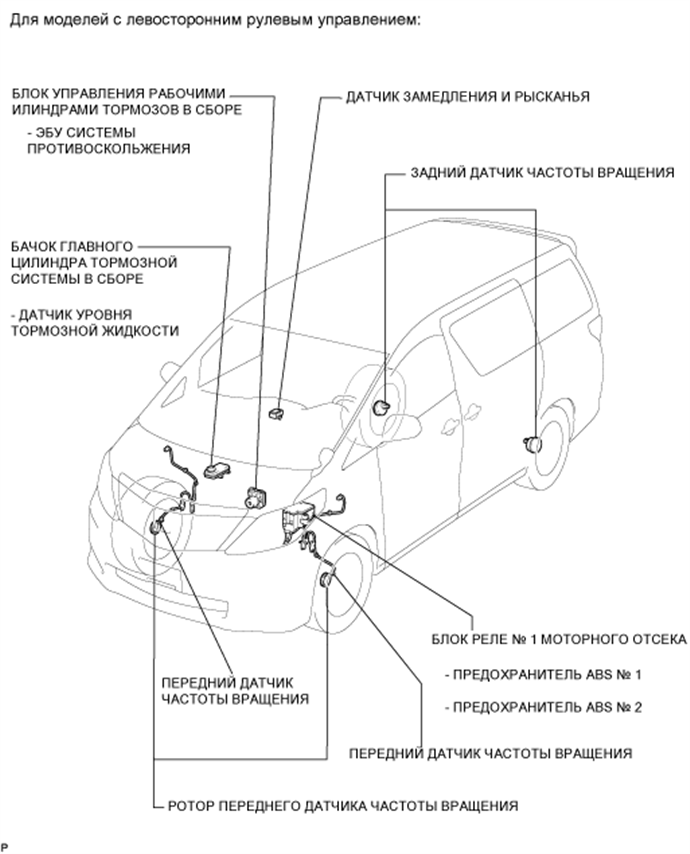
Схема системы курсовой устойчивости ESP:
Входными датчиками осуществляется фиксация конкретных параметров автомобиля, преобразовывая данные параметры в электрические сигналы. При помощи данных датчиков, технологией динамической стабилизации осуществляется оценка действий водителя, а также параметров движения транспортного средства.
При помощи данных датчиков, технологией динамической стабилизации осуществляется оценка действий водителя, а также параметров движения транспортного средства.
Датчики ESP включают в себя:
- Применяются при оценке действий водителя:
- выключатель стоп-сигнала;
- датчик давления тормозов;
- датчик угла поворота руля.
- Применяются при оценке фактических параметров движения автомобиля:
- датчик давления тормозов;
- датчик скорости поворота;
- датчик продольного ускорения;
- датчики угловой скорости колёс.
- датчик поперечного ускорения.
Блок управления ESP осуществляет приём сигналов от датчиков, и производит формирование управляющего воздействия касательно исполнительного устройства подконтрольных систем активной безопасности:
- контрольные лампы тормозов, ABS, ESP;
- переключающие, а также клапаны высокого давления ASR;
- выпускные и впускные клапаны ABS.

Во время работы осуществляется взаимодействие блока управления ESP, блока управления систем управления двигателем, а также блока управления автоматической КП. Кроме приёма сигналов, от данных систем, блок управления осуществляет формирование управляющих воздействий, при помощи двигателя, а также автоматической коробки передач на элементы системы управления.Работа динамической стабилизации обеспечивается гидравлическим блоком ABS/ASR, совместно со всеми компонентами.
Принцип работы системы курсовой устойчивости
Начало аварийной ситуации определяется благодаря сравнению действий водителя, а также параметров движения автомобиля. В том случае, если действия водителя являются различными с фактическими параметрами движения транспортного средства, система ESP осуществляет распознавание ситуации в виде неконтролируемой, и сразу включается в рабочий процесс.
Осуществление движения автомобиля при помощи курсовой устойчивости достигается при помощи нескольких способов:
- при наличии адаптивной подвески, с помощью изменения степени демпфирования амортизаторов;
- в условиях системы активного рулевого управления, при помощи изменения поворотного угла передних колес;
- изменением крутящего момента двигателя;
- во время притормаживания определённых колёс.

В ESP, изменение крутящего момента двигателя может осуществляться при помощи следующих способов:
- при наличии полного привода, при помощи перераспределения между осями крутящего момента;
- в результате отмены переключения передачи в АКПП;
- в результате изменения угла опережения зажигания;
- с помощью пропуска импульсов зажигания;
- в результате пропуска впрыска топлива;
- с помощью изменения положения дроссельной заслонки.
Система, которая объединяет подвеску, рулевое управление и курсовую устойчивость, носит название интегрированной системой управления динамикой транспортного средства.
Видео про принцип работы BOSCH ESP:
Дополнительные функции в системе динамической стабилизации
Электронный контроль устойчивости транспортного средства обладает следующими дополнительными функциями, а точнее системой:
- удаления влаги из тормозных дисков;
- повышения эффективности тормозов во время нагрева;
- стабилизации автопоезда;
- предотвращения столкновения;
- предотвращения опрокидывания;
- гидравлическим усилителем тормозов и прочие.
Данные системы не имеют практически своих конструктивных элементов. Они представляют собой программные расширения ESP.
- Roll Over Prevention (ROP), являющаяся системой предотвращения опрокидывания, осуществляет стабилизацию движения автомобиля во время угрозы опрокидывания. Исключение опрокидывания происходит благодаря уменьшению поперечного ускорения, вследствие подтормаживания передних колес, а также уменьшения крутящего момента двигателя. При этом в тормозной системе дополнительное давление создаётся при помощи активного усилителя тормозов.
- Braking Guard, являющаяся технологией предотвращения столкновения, реализуется в автомобиле, который оснащён адаптивным круиз-контролем. Она обеспечивает опасности столкновения при помощи звуковых и визуальных сигналов. При этом во время критической ситуации происходит нагнетание в тормозной системе. Вследствие этого, насос обратной подачи автоматически отключается.
- Система стабилизации автопоезда реализуется в автомобиле, который оборудован тягово-сцепным устройством.
 Данная система предотвращает рыскание прицепа во время движения автомобиля. Это достигается благодаря торможению колёс, а также снижению крутящего момента.
Данная система предотвращает рыскание прицепа во время движения автомобиля. Это достигается благодаря торможению колёс, а также снижению крутящего момента. - Fading Brake Support или Over Boost (FBS) является системой повышения эффективности тормозов во время нагрева, осуществляет предотвращение неполного сцепления тормозных колодок с дисками, которое возникает в процессе нагрева, при помощи дополнительного повышения давления в тормозном приводе.
- Система удаления влаги из тормозных дисков активируется при скорости более 50 км/час, а также при включенных стеклоочистителях. Система работает за счёт кратковременного повышения давления в передних колёсах. Благодаря этому происходит прижимание тормозных колодок к дискам, а также испарение влаги.
Достоинства ESP и ABS:
Похожие
Что такое электронный контроль устойчивости и как он работает?
The Drive и его партнеры могут получать комиссию, если вы покупаете продукт по одной из наших ссылок. Подробнее.
Подробнее.
Запрещена в Формуле 1, отключена раллийщиками, а вы, да вы, доверяете ей безопасность своих детей. Нет, я не говорю о каркасах безопасности или камерах-нянях, я говорю об электронном контроле устойчивости! Ууууу!
Хорошо, контроль устойчивости — это не совсем то, что вызывает аплодисменты у большинства людей, но эта технология помогает водителям оставаться на дороге с середины 19-го века.90-х и с тех пор становится только лучше и лучше. Именно там, когда ваши навыки терпят неудачу или дорога становится коварной и, вероятно, спасла бесчисленное количество жизней, и все это без благодарности или особого обслуживания.
Чтобы лучше понять технологию, как она работает и как она обеспечивала вашу безопасность все эти годы, редакторов техно-болтовни на The Drive имеют все ответы ниже. Готовы узнать, как контроль устойчивости спас вашу задницу?
Автор демонстрирует, как выглядит контроль устойчивости до упора. , Джозеф Юн младшийЧто такое контроль стабильности?
На самом базовом уровне система контроля устойчивости представляет собой набор электронных систем, работающих вместе, чтобы ваш автомобиль двигался по прямой, когда погода или дорожное покрытие становятся ненастными или скользкими.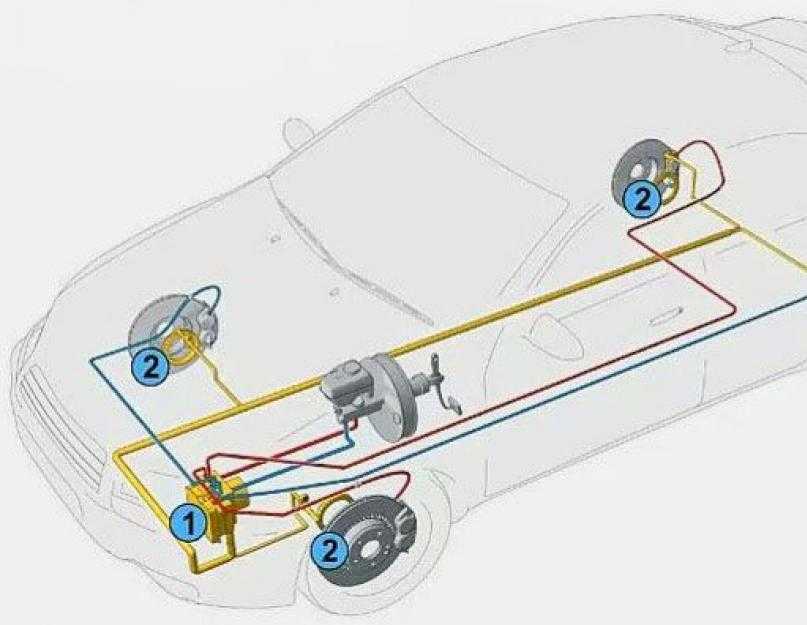 Проще говоря, он держит вашу задницу в дороге, когда вы едете в бакалейные лавки по какой-нибудь Скалистой дороге посреди ледяной бури.
Проще говоря, он держит вашу задницу в дороге, когда вы едете в бакалейные лавки по какой-нибудь Скалистой дороге посреди ледяной бури.
Как работает система стабилизации?
Система курсовой устойчивости работает через систему тщательно расположенных датчиков по всему автомобилю. Эти датчики контролируют тангаж, крен и рыскание и работают вместе с системой контроля тяги автомобиля.
На практике система курсовой устойчивости срабатывает, когда датчики обнаруживают, что водитель теряет контроль над направлением движения автомобиля. Когда это происходит, система ограничивает крутящий момент и мощность и может активировать АБС автомобиля, чтобы уменьшить скольжение, то есть когда вы пытаетесь остановиться, но автомобиль начинает так или иначе скользить.
Здесь нет антипробуксовочной системы. , Джозеф Юн-младшийЧто такое контроль тяги?
В простейшем случае противобуксовочная система представляет собой автоматизированную систему, которая снижает мощность автомобиля на определенных колесах при обнаружении проскальзывания колес. Итак, когда вы ставите его на снег, и ничего не происходит, кроме мигающего диско-шара лампочки контроля тяги, вот что происходит.
Итак, когда вы ставите его на снег, и ничего не происходит, кроме мигающего диско-шара лампочки контроля тяги, вот что происходит.
В чем разница между контролем тяги и контролем устойчивости?
Эти две системы идут рука об руку, но это не одно и то же, что бы вы ни слышали. Как уже упоминалось, противобуксовочная система управляет проскальзыванием колес и помогает поддерживать тягу в условиях слабого сцепления с дорогой. Однако контроль устойчивости поддерживает рыскание, тангаж и крен автомобиля контролируемым образом. Система курсовой устойчивости позволяет вашему автомобилю двигаться по прямой даже в ненастную погоду или в условиях плохой тяги.
Для большинства эти системы предназначены для того, чтобы спасти ваши задницы в плохую погоду, но для энтузиастов они также предназначены для того, чтобы вы чувствовали себя богом вождения. Энтузиасты извлекают выгоду из контроля тяги и устойчивости, поскольку они будут удерживать их на трассе, на гоночной трассе, вне барьеров для шин или вдали от обрыва дороги, даже при неправильных действиях.
Что такое всесезонные шины?
Всесезонные шины существуют с конца 1970-х годов, когда компания Goodyear представила шины, предназначенные для круглогодичного использования. Они способны управлять мокрыми или сухими дорогами и могут безопасно работать даже на легком снегу. Всесезонные шины предназначены для работы в широком диапазоне температур, но не в экстремальных условиях в любом направлении.
Что такое зимние шины?
Зимние шины изготавливаются из специальной резиновой смеси, которая сохраняет гибкость и обеспечивает сцепление даже при температуре ниже 45 градусов по Фаренгейту. Как правило, они имеют глубокий рисунок протектора и несколько небольших канавок, называемых ламелями, которые «вгрызаются» в снег. Даже без снега зимние шины обеспечивают лучшее сцепление с дорогой в холодную погоду.
Что такое рабочие шины?
Высокопроизводительная шина представляет собой тип шины с сочетанием повышенных адгезионных свойств, достигаемых за счет химической природы резиновых смесей шины и рисунка протектора, предназначенных для транспортных средств с высокими эксплуатационными характеристиками. Эти специально разработанные конструкции повышают отзывчивость, управляемость и сцепление шин с дорогой.
Однако существуют шины с разными эксплуатационными характеристиками. Хотя у каждого производителя есть свое собственное название марок, их можно разделить на три отдельные категории: Performance (хорошие характеристики), Summer Performance (лучшие характеристики) и R-compound (лучшие характеристики).
Добро пожаловать в школу дрифта Джонатона Кляйна. , Тони МарковичТермины Traction, которые следует знать
Получайте образование!
Сцепление
Сцепление — это физическое сцепление шин автомобиля с дорожным покрытием. Среды с низким сцеплением включают дождь, снег, мокрый снег, гравий и все остальное, что мешает контакту между ними. Высокая тяга — это когда ничто не мешает этому контакту, например, летом. По иронии судьбы, вы также можете потерять сцепление с дорогой на идеально гладкой и сухой поверхности, если шины перегреются.
Устойчивость
Устойчивость автомобиля относится к тому, контролирует ли водитель траекторию движения автомобиля, т. е. движение из стороны в сторону или его отсутствие.
Рыскание
Рыскание — это поворот транспортного средства или его неустойчивость.
Шаг
Шаг — это то, как автомобиль движется вперед и назад, реагируя на торможение и ускорение автомобиля.
Крен
Крен — это физическая сила, возникающая, когда автомобиль входит в поворот и наклоняется к вершине.
Разожгите костры и подожгите шины! Подождите, это неправильно. , Тони МарковичЧасто задаваемые вопросы об электронной системе курсовой устойчивости
У вас есть вопросы, В Drive есть ответы!
В: Так что же означает индикатор контроля устойчивости? Ответ: Вы вышли из-под контроля.
A: Нравятся ли вам сотрясения мозга и тысячи в счетах за механиков и врачей?
Вопрос: №A: Вот ваш ответ.
Q: Хорошо, тогда какие автомобили имеют контроль устойчивости?A: Большинство новых автомобилей оснащены системой контроля устойчивости, так что вы можете быть уверены, что купите новый автомобиль.
В: Хорошо, тогда я могу ездить с выключенным контролем устойчивости?A: Конечно, вы можете. У вас просто не будет этих систем, которые помогут вам, если ваша машина начнет выходить из-под контроля.
Найдите подходящие шины с помощью стойки для шин
Послушайте, мы знаем, как сложно бывает выбрать правильную шину. Между мешаниной слов, которые являются спецификациями шин, а также названиями производителей шин для шин, которые никогда просто не говорят, что они собой представляют, это может быть болью, и вы можете в конечном итоге выбрать неподходящую обувь для своей поездки. Вот почему мы сотрудничаем с нашими друзьями из Tire Rack. Они избавят вас от головной боли при покупке шин. Все, что вам нужно сделать, это нажать здесь.
Вот почему мы сотрудничаем с нашими друзьями из Tire Rack. Они избавят вас от головной боли при покупке шин. Все, что вам нужно сделать, это нажать здесь.
Давайте поговорим, оставьте комментарий ниже, чтобы поговорить с
The Drive’s Редакторы!Мы здесь, чтобы быть экспертами во всем, что связано с практическими рекомендациями. Используйте нас, хвалите нас, кричите на нас. Комментарий ниже и давайте поговорим! Вы также можете кричать на нас в Twitter или Instagram, вот наши профили.
Джонатон Кляйн: Twitter (@jonathon.klein), Instagram (@jonathon_klein)
Тони Маркович: Twitter (@T_Marko), Instagram (@t_marko)
Крис Тиг: Twitter (@TeagueDrives), Instagram (@TeagueDrives)
Рекомендуемые товары
Реальная краш-оценка технологии контроля устойчивости транспортного средства (VSC)
- Список журналов
- Annu Proc Assoc Adv Automot Med
- т.
 49; 2005 г.
49; 2005 г. - PMC3217442
Annu Proc Assoc Adv Automot Med. 2005 г.; 49: 19–34.
Информация об авторе Информация об авторских правах и лицензиях Заявление об ограничении ответственности
В этом исследовании оценивается влияние системы контроля устойчивости транспортного средства (VSC) на снижение частоты аварий для части транспортных средств в автопарке США. Сравнивается частота аварий для различных типов ударов до и после внедрения технологии VSC. Были проанализированы зарегистрированные полицией аварии из шести доступных файлов штата США за 1998–2002 гг., В том числе 13 987 исследовательских транспортных средств, не оснащенных этой технологией, и 5 671 авария транспортных средств, оснащенных VSC в качестве стандартной функции. В целом 11,2% (95% ДИ: 2,4%, 21,1%) снижение вовлеченности в лобовое столкновение нескольких транспортных средств было выявлено для транспортных средств, оборудованных VSC.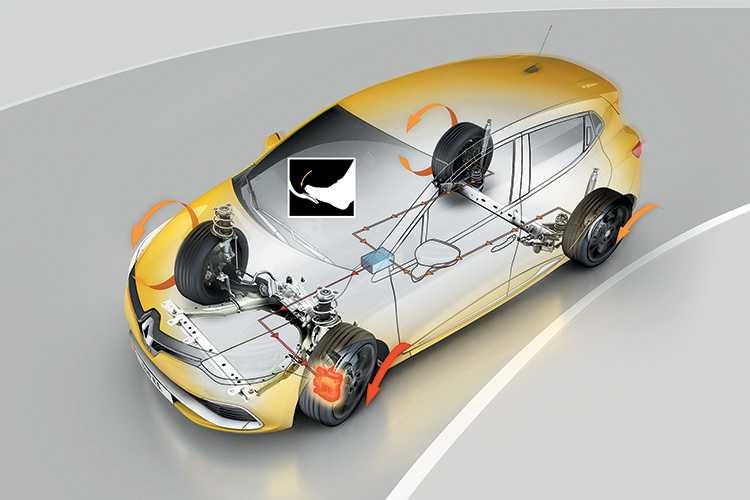 Было обнаружено снижение частоты аварий с участием одного транспортного средства на 52,6% (95% ДИ: 42,5%, 62,7%).
Было обнаружено снижение частоты аварий с участием одного транспортного средства на 52,6% (95% ДИ: 42,5%, 62,7%).
В последние годы благодаря многочисленным технологическим достижениям повысилась активная безопасность транспортных средств. Эти технологии — антиблокировочная система тормозов, контроль тяги, активный контроль рыскания и активный контроль крена — разрабатываются, чтобы помочь водителям избежать аварий. Такие технологии активной безопасности могут снизить тяжесть аварии или даже предотвратить ее возникновение.
Основной функцией VSC является помощь водителю в сохранении контроля над автомобилем во время внезапных маневров или неблагоприятных погодных условий. VSC можно отнести к технологии активного контроля рыскания, которая также использует функции антиблокировочной системы тормозов и контроля тяги. Система VSC создает тормозящую силу и соответствующий внутренний момент, помогая предотвратить занос передних колес и улучшая отслеживание курса. Внешние моменты также могут быть применены, чтобы избежать заноса задних колес и сохранить положение автомобиля.
Технология VSC оценивает действия водителя и водителя по сравнению с реальным положением автомобиля. Если обнаружены различия, система контроля устойчивости будет использовать тормозную систему автомобиля и мощность двигателя, чтобы компенсировать эти различия. В ситуации избыточной поворачиваемости контроль над задней частью автомобиля теряется. В этом случае система VSC в основном задействует внешний передний тормоз, чтобы перенаправить транспортное средство на его предполагаемый курс. В случае недостаточной поворачиваемости передняя часть автомобиля имеет тенденцию выскальзывать наружу. Чтобы исправить это, система VSC в основном задействует внутренний задний тормоз, чтобы перенаправить автомобиль на заданный курс.
Аналогичные системы были представлены другими производителями автомобилей под такими названиями, как электронный контроль устойчивости (ESC), контроль динамики автомобиля (VDC) или AdvanceTrac.
Начиная с 1998 модельного года некоторые автомобили в стандартной комплектации оснащались VSC. перечислены эти модели автомобилей и год, когда система VSC была впервые реализована в каждой из них. Другие технологии безопасности и основные конструктивные характеристики транспортных средств в целом были одинаковыми до и после даты внедрения систем VSC. Таким образом, изменения производительности этих транспортных средств в реальных условиях вождения должны поддаваться измерению при сравнении частоты аварий до и после внедрения технологии VSC.
перечислены эти модели автомобилей и год, когда система VSC была впервые реализована в каждой из них. Другие технологии безопасности и основные конструктивные характеристики транспортных средств в целом были одинаковыми до и после даты внедрения систем VSC. Таким образом, изменения производительности этих транспортных средств в реальных условиях вождения должны поддаваться измерению при сравнении частоты аварий до и после внедрения технологии VSC.
Table 1
Toyota and Lexus Vehicle Models and Model Years with and without VSC as Standard Equipment
| Make and Model | Final Year w/o VSC | VSC Standard |
|---|---|---|
| Passenger Cars | ||
| Lexus LS430/400 | 1997 | 1998 |
| Lexus GS430/400/300 | 1997 | 1998 |
| SUVs | ||
| Toyota Land Cruiser | 1999 | 2000 |
| Lexus LX470 | 1999 | 2000 |
| Toyota 4Runner | 2000 | 2001 |
| Lexus RX300 | 2000 | 2001 |
Открыть в отдельном окне
Несколько предыдущих исследований имеют непосредственное отношение к этой работе. В 1995 г. Эванс (1998) провел статистический анализ данных об авариях в штатах для оценки эффективности антиблокировочных тормозных систем. Он предложил методы контроля воздействия, основанные на обстоятельствах, в которых технология должна быть наиболее эффективной, по сравнению с авариями, в которых антиблокировочная система тормозов (ABS) не работает. Для этих анализов аварии в сухую погоду использовались для контроля воздействия, тогда как количество лобовых столкновений в сырую погоду оценивалось для транспортных средств с технологией и без нее.
В 1995 г. Эванс (1998) провел статистический анализ данных об авариях в штатах для оценки эффективности антиблокировочных тормозных систем. Он предложил методы контроля воздействия, основанные на обстоятельствах, в которых технология должна быть наиболее эффективной, по сравнению с авариями, в которых антиблокировочная система тормозов (ABS) не работает. Для этих анализов аварии в сухую погоду использовались для контроля воздействия, тогда как количество лобовых столкновений в сырую погоду оценивалось для транспортных средств с технологией и без нее.
Как и анализ технологии VSC, представленный здесь, исследование Эванса по антиблокировочной системе торможения включало автомобили, которые не были оборудованы этой технологией в течение одного года, после чего в следующем модельном году она была введена в качестве стандартного оборудования. В ходе исследования Эванса применялись методы корректировки влияния возраста транспортного средства на возникновение аварий и других искажающих факторов.
Что касается необходимости систем активного контроля, несколько исследователей сообщили о характеристиках аварий до столкновения. По данным немецкой страховой компании, Лангвидер (1999) сообщил, что 25–30% аварий связаны с заносом в той или иной форме перед столкновением. Он отметил, что в 67% этих случаев занос происходил в диапазоне 40–70 метров (131–230 футов). Сферко и др. (2001), используя Европейское исследование причин аварий, определили, что системы контроля курсовой устойчивости влияют на 67% аварий со смертельным исходом и 42% аварий с травмами, когда «потеря управления транспортным средством» была классифицирована как причина аварии. Для всех типов аварий это соответствует 34% аварий со смертельным исходом и 18% аварий с травмами.
Тингвалл и др. (2003) изучали характеристики автомобилей, оборудованных ESP, в Швеции в период с 2000 по 2002 год, используя методы анализа, аналогичные исследованию Эванса по антиблокировочным тормозным системам. Удары сзади в сухую погоду были выбраны как сценарий аварии, наименее чувствительный к технологии ESP. Это обеспечило критерий нормализации воздействия аварии и расчета эффективности ESP. В исследовании не учитывалось повышенное воздействие на автомобили более старых моделей. Общая эффективность ЭСП составила 22,1 ± 21%. На мокрой дороге эффективность составила 31,5 ± 23,4 %, а на льду и снегу — 38,2 ± 26,1 %.
Это обеспечило критерий нормализации воздействия аварии и расчета эффективности ESP. В исследовании не учитывалось повышенное воздействие на автомобили более старых моделей. Общая эффективность ЭСП составила 22,1 ± 21%. На мокрой дороге эффективность составила 31,5 ± 23,4 %, а на льду и снегу — 38,2 ± 26,1 %.
В 2004 г. Dang (2004) и Национальная администрация безопасности дорожного движения (NHTSA) выпустили оценочную записку, в которой указывалось, что было обнаружено снижение на 35 % (95 % ДИ: 29 %, 41 %) количества аварий с участием одного транспортного средства для легковых автомобилей. для автомобилей с ESC. Было показано снижение на 67% (95% ДИ: 60%, 74%) для внедорожников. Эти сокращения были установлены с использованием файлов данных об авариях штата США. Что касается аварий со смертельным исходом, используя данные FARS, НАБДД сообщило о снижении на 30 % (95 % ДИ: 10 %, 50 %) аварий с участием легковых автомобилей и на 63 % (95 %).5% ДИ: 44%, 81%) снижение смертности для внедорожников.
Исследование, проведенное Фармером (2004) и Страховым институтом безопасности дорожного движения (IIHS) в 2004 году, показало значительное снижение количества аварий с участием одного транспортного средства и смертельных исходов для транспортных средств, оснащенных технологией контроля устойчивости. Используя данные об авариях в штате США, было сообщено о снижении на 7% (95% ДИ: 3%, 10%) общего участия в авариях для транспортных средств, оборудованных системой контроля устойчивости. Наблюдалось снижение риска аварии с участием одного транспортного средства на 41% (95% ДИ: 33%, 48%) и 34% (95%).5% ДИ: 21%, 45%) было обнаружено общее снижение риска ДТП со смертельным исходом. Используемый метод регистрации транспортного средства считается контрольным и учитывает возраст транспортного средства для оценки эффективности систем контроля устойчивости для ряда марок и моделей транспортных средств.
Масами Ага и Акио Окада (2003) использовали японские полевые данные Института исследования и анализа данных о дорожно-транспортных происшествиях (ITARDA) для изучения работы VSC для трех автомобилей Toyota. Основываясь на использованных источниках данных, исследование пришло к выводу, что VSC наиболее эффективно снижает количество аварий с участием одного транспортного средства (снижение на 35%) и лобовых столкновений транспортных средств (снижение на 30%). В нем также указано, что более серьезные аварии, в зависимости от степени повреждения транспортного средства, будут еще больше сокращаться. Это исследование было основано на 3 распространенных платформах пассажирских транспортных средств в Японии, включая 980 000 автомобильных лет без VSC и 390 000 автомобильных лет с VSC.
Основываясь на использованных источниках данных, исследование пришло к выводу, что VSC наиболее эффективно снижает количество аварий с участием одного транспортного средства (снижение на 35%) и лобовых столкновений транспортных средств (снижение на 30%). В нем также указано, что более серьезные аварии, в зависимости от степени повреждения транспортного средства, будут еще больше сокращаться. Это исследование было основано на 3 распространенных платформах пассажирских транспортных средств в Японии, включая 980 000 автомобильных лет без VSC и 390 000 автомобильных лет с VSC.
Представленный здесь анализ расширяет работу Ага и Окада по оценке автомобилей Toyota в более крупной выборке аварий, происходящих в Соединенных Штатах. Анализ, описанный ниже, также выигрывает от большего количества платформ транспортных средств и лет эксплуатации для включения в исследование. Целью данного исследования является выявление снижения количества определенных типов аварий для транспортных средств, оборудованных системой VSC, с использованием большого объема данных об авариях.
Это исследование определяет уровень участия в авариях для подмножества транспортных средств, показанных в . Данные об авариях в штате США использовались для оценки участия исследуемых транспортных средств в разбивке по типам аварий. Были внесены коррективы для учета влиятельных факторов, включая подверженность транспортного средства участию в аварии, а также влияние возраста транспортного средства на вероятность участия в определенных типах аварий. Окончательные шансы на сбой сравниваются для платформ до и после добавления технологии VSC в качестве стандартной функции.
ИСТОЧНИКИ ДАННЫХ
В этом исследовании использовались файлы данных о дорожно-транспортных происшествиях штата NHTSA и Информационная система безопасности дорожного движения штата (HSIS) Федерального управления автомобильных дорог (FHWA). Файлы данных штата представляют собой перепись аварий, серьезность которых превышает требуемую для подачи полицейского отчета. Файлы состояния составляются DOT каждого штата и адаптируются для использования NHTSA и FHWA.
Файлы о сбоях в штатах содержат самый большой список сбоев, произошедших в определенном регионе США; однако элементы данных и их определения значительно различаются между файлами состояния. определяет штаты, среднегодовое количество задействованных транспортных средств и доступные годы данных, которые использовались для этого анализа. Эти состояния были выбраны из-за наличия информации о марке, модели и модельном году автомобиля. Для каждого штата, указанного в списке, за исключением Техаса, были расшифрованы идентификационные номера транспортных средств (VIN), чтобы идентифицировать соответствующие транспортные средства для исследования. Техас предоставляет уникальные коды транспортных средств и информацию о годе выпуска в своих файлах аварий. Эти коды использовались для идентификации транспортных средств, попавших в аварию, которые представляют интерес для данных по Техасу.
Таблица 2
Доступность файлов аварии в США и ежегодные записи о сбоях автомобилей, собранные
| State | Доступные данные | .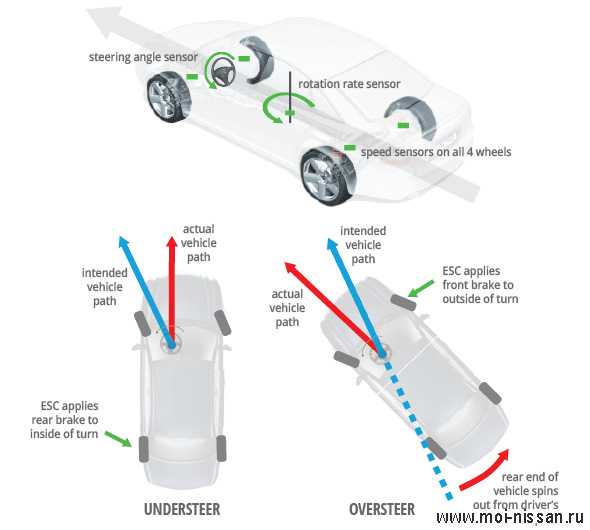 | 496,944 |
|---|---|---|---|
| Иллинойс | 2000–2003 | 746 995 | |
| Мэриленд | 1998– | ||
| Maryland | 1998–1 | ||
| Maryland | –1 | ||
| Maryland | – | ||
. 0188 0188 | |||
| Missouri | 1998–2001 | 356,868 | |
| Texas | 1998–2001 | 587,400 | |
| Utah | 1998–2002 | 99,339 |
Open in a separate window
Во время анализа файлов данных о сбоях, собранных по состоянию, несколько функций препятствуют простой агрегации файлов данных по состояниям. Во-первых, собранные наборы переменных не являются общими для всех штатов. Например, определение направления аварии классифицируется в соответствии с направлением часов для Канзаса, тогда как Флорида, Иллинойс, Мэриленд, Миссури и Юта классифицируют 18 областей потенциального повреждения для каждого транспортного средства.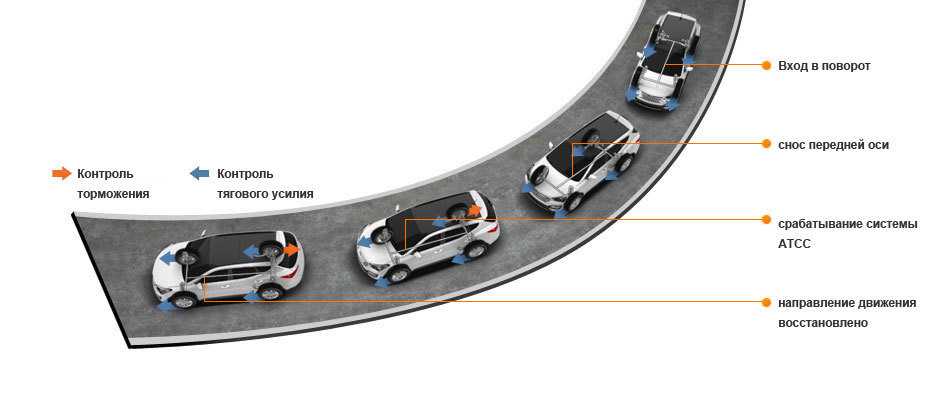 Нью-Мексико не кодирует индикатор направления аварии. Техас кодирует 3-значный тип повреждения транспортного средства, который содержит индикаторы местоположения повреждения и степени повреждения для каждого транспортного средства в соответствии со Шкалой повреждений транспортных средств для следователей аварий, разработанной Национальным советом по безопасности.
Нью-Мексико не кодирует индикатор направления аварии. Техас кодирует 3-значный тип повреждения транспортного средства, который содержит индикаторы местоположения повреждения и степени повреждения для каждого транспортного средства в соответствии со Шкалой повреждений транспортных средств для следователей аварий, разработанной Национальным советом по безопасности.
Хотя представление направления в каждом штате можно классифицировать по основным областям кузова автомобиля (т. е. спереди, слева, справа и сзади), небольшие различия в определениях каждого из них могут повлиять на пропорции аварий при сравнении между штатами.
Второй важной характеристикой данных, собираемых штатом, являются различные критерии отчетности для полицейских отчетов о несчастных случаях (PAR). Например, PAR Флориды включают следующее: авария, повлекшая по крайней мере один смертельный исход, авария, повлекшая за собой телесные повреждения, авария, повлекшая за собой повреждение транспортного средства, авария с повреждением имущества, когда транспортное средство покинуло место происшествия, авария, в которой по крайней мере один водитель находится под воздействием алкогольных напитков или химических веществ, или авария считается достаточно серьезной, чтобы сообщить о ней следователю.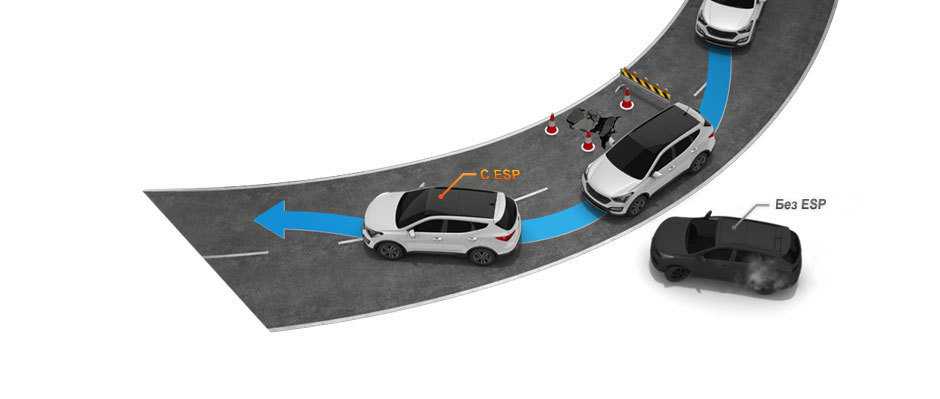 В зарегистрированных полицией авариях в Иллинойсе должен быть материальный ущерб на сумму 500 долларов или более, смертельный исход или телесные повреждения, связанные с аварией. В авариях в Мэриленде, о которых сообщает полиция, по крайней мере одно транспортное средство, участвовавшее в аварии, должно быть отбуксировано с места происшествия, а также иметь травмы или смертельный исход, связанные с аварией. В Техасе отчет полиции требуется в случае аварии, повлекшей за собой материальный ущерб, телесные повреждения или смертельный исход на сумму не менее 250 долларов.
В зарегистрированных полицией авариях в Иллинойсе должен быть материальный ущерб на сумму 500 долларов или более, смертельный исход или телесные повреждения, связанные с аварией. В авариях в Мэриленде, о которых сообщает полиция, по крайней мере одно транспортное средство, участвовавшее в аварии, должно быть отбуксировано с места происшествия, а также иметь травмы или смертельный исход, связанные с аварией. В Техасе отчет полиции требуется в случае аварии, повлекшей за собой материальный ущерб, телесные повреждения или смертельный исход на сумму не менее 250 долларов.
Поскольку аварии с наездом сзади не часто приводят к травмам пассажиров или очень высокому уровню материального ущерба, могут возникнуть значительные колебания количества аварий из-за лишь незначительных различий в государственных критериях отчетности об авариях.
Для этого анализа частота аварий рассчитывалась отдельно по штатам, чтобы избежать возможных несоответствий из-за различных критериев выборки. Кроме того, на количество аварий также может влиять группировка аварий в географических регионах с обычными погодными условиями и типами дорог. По этим причинам образцы состояния были проанализированы независимо; однако для этого анализа файлы данных были объединены за доступные годы в каждом штате. Были приняты меры к тому, чтобы определения переменных и критерии сбора случаев оставались неизменными из года в год для каждого штата в течение оцениваемого периода.
По этим причинам образцы состояния были проанализированы независимо; однако для этого анализа файлы данных были объединены за доступные годы в каждом штате. Были приняты меры к тому, чтобы определения переменных и критерии сбора случаев оставались неизменными из года в год для каждого штата в течение оцениваемого периода.
показывает количество регистраций испытуемых автомобилей по штатам исследования. Количество регистраций было получено из набора данных RL Polk National Vehicle Population Profile (NVPP) по штатам и разделено на основе наличия VSC, как показано.
Таблица 3
Количество зарегистрированных транспортных средств и количество аварий для исследуемых автомобилей
| Количество зарегистрированных транспортных средств (календарный год 2001) | Количество аварий исследуемых транспортных средств1 * 198–2002) | |||
|---|---|---|---|---|
| State | Pre VSC | Post VSC | Pre VSC | Post VSC |
| Florida | 52,302 | 55,752 | 3,356 | 1,181 |
| Illinois | 22,491 | 23,991 | 3,405 | 2,115 |
| Maryland | 12,864 | 12,048 | 1,320 | 479 |
| Missouri | 5,720 | 5,018 | 660 | 199 |
| Texas | 51,607 | 46,206 | 4,081 | 1,288 |
| Utah | 3,496 | 2,618 | 658 | 183 |
| Total | 155,383 | 150,828 | 13,987 | 5,671 |
Открыть в отдельном окне
* количество аварий может включать разные годы данных для каждого штата (см.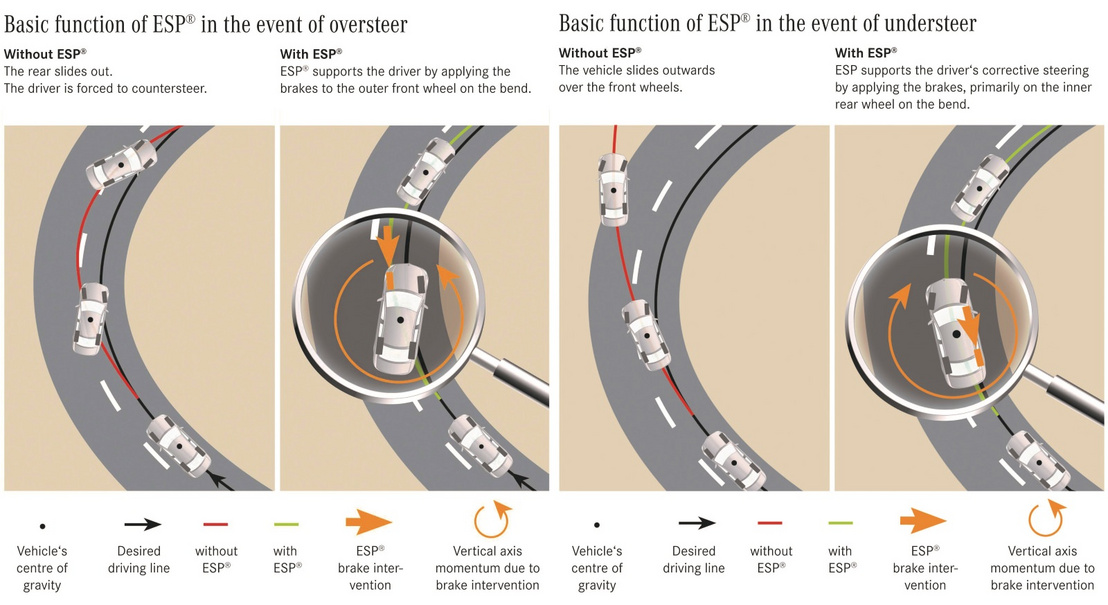 ) Существуют некоторые различия в доступных годах данных для каждого штата, поэтому штаты с большим объемом аварий, включая Флориду и Техас, могут быть несколько недопредставлены из-за отсутствия наборов данных на момент проведения этого анализа.
) Существуют некоторые различия в доступных годах данных для каждого штата, поэтому штаты с большим объемом аварий, включая Флориду и Техас, могут быть несколько недопредставлены из-за отсутствия наборов данных на момент проведения этого анализа.
ТИПЫ АВАРИЙ, ВЛИЯЮЩИЕ НА КОНТРОЛЬ УСТОЙЧИВОСТИ ТРАНСПОРТНОГО СРЕДСТВА
Системы VSC корректируют условия, связанные с потерей управления водителем. Эти условия могут быть вызваны чрезмерным усилием рулевого управления или неблагоприятными погодными условиями. Чтобы отслеживать исторические данные об авариях для выявления влияния систем VSC, были выделены типы аварий, связанные с потерей управления.
По данным Системы отчетности по анализу смертельных исходов NHTSA (FARS), аварии со смертельным исходом из-за потери управления чаще всего связаны с авариями с участием одного транспортного средства или лобовыми столкновениями с участием нескольких транспортных средств. Боковые удары и удары сзади редко сопровождаются потерей управления ударяющим транспортным средством, но часто происходит потеря управления ударяющим транспортным средством.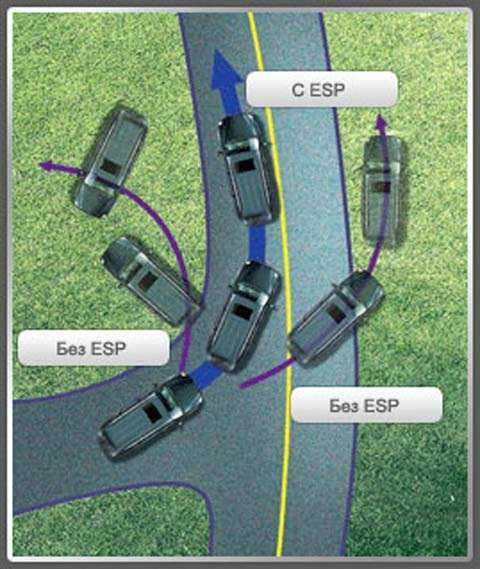 В этом исследовании будет рассмотрено влияние VSC на лобовые столкновения нескольких транспортных средств и столкновения одиночных транспортных средств во всех направлениях.
В этом исследовании будет рассмотрено влияние VSC на лобовые столкновения нескольких транспортных средств и столкновения одиночных транспортных средств во всех направлениях.
РАСЧЕТ ВЕРОЯТНОСТИ АВАРИИ
Вероятность аварии была рассчитана с использованием метода «индуцированного воздействия», примененного Tingvall et al. (2003). Используя этот метод, количество сбоев, в которых предполагается влияние VSC, делится на совокупность сбоев, в которых предполагается, что технология не оказывает никакого влияния. Незатронутая группа действует как контроль популяции.
Как описано выше, технология VSC помогает водителям сохранять заданный курс в сложных дорожных ситуациях. По этой причине предполагается, что VSC оказывает влияние на аварии с участием одного транспортного средства и лобовые столкновения с участием нескольких транспортных средств, когда потеря управления часто является ключевым фактором, приводящим к аварии. Лобовые столкновения определяются как любые столкновения, при которых лобовое повреждение исследуемого транспортного средства произошло или начальная точка удара находилась в передней части транспортного средства, независимо от области повреждения в столкнувшемся транспортном средстве (т. е. лобовые столкновения не ограничивались лобовыми столкновениями). _Количество этих типов аварий, на которые может положительно повлиять технология VSC, является числителем расчета вероятности аварии, показанного в уравнении 1.
е. лобовые столкновения не ограничивались лобовыми столкновениями). _Количество этих типов аварий, на которые может положительно повлиять технология VSC, является числителем расчета вероятности аварии, показанного в уравнении 1.
В знаменателе уравнения 1 аварии, на которые не должна влиять технология VSC, используются в качестве контрольной группы. Этот подсчет аварий покажет различия в подверженности конкретной марки, модели и модельного года возможным аварийным событиям. Подсчет аварий с ударом сзади будет служить показателем количества транспортных средств, находящихся в эксплуатации, и частоты, с которой эти транспортные средства управляются (т. е. подвержены потенциальным авариям).
CrashOddsVSC=NF(VSC)NR(VSC)
(1)
Где:
NF (VSC) = количество фронтальных или одноиколевых аварий для автомобилей Post VSC
NR (VSC) = Подсчет задних аварий для посадных vsc, выравниваемых VSC Aceedculs As As Aceedculs As As Aceedickcolds As As Aceedculs As As Aceedickles As Aceedculs. транспортное средство, подвергшееся наезду
транспортное средство, подвергшееся наезду
В случае столкновений с ударом сзади (когда транспортное средство, оборудованное VSC, является транспортным средством, столкнувшимся с ударом), предполагается, что устойчивость сбитого транспортного средства практически не влияет на вероятность столкновения. Частота ударов сзади дает представление об относительном количестве транспортных средств и условиях, когда транспортное средство управляется без влияния рассматриваемой технологии.
Для сравнения с уравнением 1 можно таким же образом рассчитать отношение шансов участия в аварии для транспортных средств без технологии (см. уравнение 2).
Crashoddsprevsc = NF (PREVSC) NR (PREVSC)
(2)
Где:
NF (PrevSC) = Подсчет лобных фронтальных или одноилубных аварий для переездов для исследований. NR (до VSC) = количество столкновений сзади для исследуемых автомобилей до VSC в качестве столкнувшегося автомобиля
Если коэффициенты, рассчитанные с использованием уравнений 1 и 2, значительно отличаются друг от друга, а другие условия, помимо внедренной технологии, остаются неизменными, то технология может считаться влиятельной. Если VSC эффективно помогает водителям сохранять контроль над своими транспортными средствами и избегать определенного сценария аварии, общая величина CrashOdds VSC должна быть меньше, чем CrashOdds preVSC . Отношение шансов, которое получается, когда CrashOdds VSC делится на CrashOdds preVSC показывает общий эффект технологии в уменьшении данного типа аварий. Если технология способствует уменьшению числа аварий, отношение шансов, рассчитанное по уравнению 3, будет меньше 1. Эванс во время анализа систем ABS, возраст автомобиля (или эффект года выпуска), как известно, значительно влияет на участие в аварии. В 1998 исследования эффективности антиблокировочной системы тормозов, Эванс сообщает, что автомобили старше всего на один год показывали почти на 9% больше аварийности, чем их более молодые аналоги. Более недавнее исследование Poindexter (2003) показывает, что эти эффекты гораздо менее выражены на основе данных NASS/GES; тем не менее, существует увеличение риска аварии.
Если VSC эффективно помогает водителям сохранять контроль над своими транспортными средствами и избегать определенного сценария аварии, общая величина CrashOdds VSC должна быть меньше, чем CrashOdds preVSC . Отношение шансов, которое получается, когда CrashOdds VSC делится на CrashOdds preVSC показывает общий эффект технологии в уменьшении данного типа аварий. Если технология способствует уменьшению числа аварий, отношение шансов, рассчитанное по уравнению 3, будет меньше 1. Эванс во время анализа систем ABS, возраст автомобиля (или эффект года выпуска), как известно, значительно влияет на участие в аварии. В 1998 исследования эффективности антиблокировочной системы тормозов, Эванс сообщает, что автомобили старше всего на один год показывали почти на 9% больше аварийности, чем их более молодые аналоги. Более недавнее исследование Poindexter (2003) показывает, что эти эффекты гораздо менее выражены на основе данных NASS/GES; тем не менее, существует увеличение риска аварии.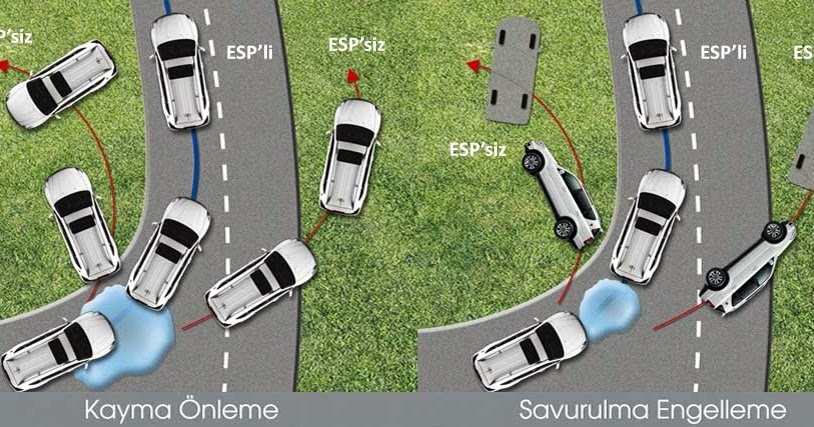
Для этого исследования важно учитывать влияние возраста транспортного средства на соотношение условий исследования по отношению к авариям с наездом сзади, как описано уравнениями 1 и 2. Если влияние возраста транспортных средств влияет на частоту участия в авариях в числители или знаменатели этих уравнений, то необходимо учитывать эффект, чтобы точно оценить вклад VSC.
показывает относительный процент лобовых, боковых и задних столкновений в шести файлах данных о состоянии, используемых для этого исследования. Эти тенденции указывают на увеличение доли лобовых аварий среди 90 003 зарегистрированных аварий 90 004 по сравнению с возрастом транспортного средства. И наоборот, доля ударов сзади , о которых сообщается , по-видимому, уменьшается с возрастом автомобиля. Следует проявлять осторожность при интерпретации тенденций, показанных на рис. Возможно, что с возрастом автомобили чаще попадают в лобовые столкновения; однако эта тенденция также может возникнуть из-за уменьшения количества зарегистрированных ударов сзади по мере старения транспортных средств.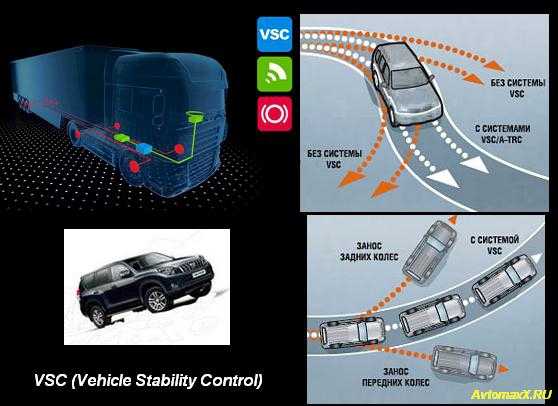 Это может быть вызвано коэффициентом износа транспортных средств или уменьшением количества случаев ДТП с наездом сзади, о которых сообщалось в полицию в тех случаях, когда был подан PAR. Эффект учитывается в анализе, представленном здесь.
Это может быть вызвано коэффициентом износа транспортных средств или уменьшением количества случаев ДТП с наездом сзади, о которых сообщалось в полицию в тех случаях, когда был подан PAR. Эффект учитывается в анализе, представленном здесь.
Открыть в отдельном окне
Коэффициент аварийности транспортных средств по режимам аварийности в зависимости от возраста автомобиля.
Чтобы скорректировать влияние возраста автомобиля на соотношение числа случаев лобового и заднего столкновения, можно рассчитать второе отношение шансов. Соотношение, показанное в уравнении 4, определяет вероятность попадания в аварию по отношению к ударам сзади для транспортного средства, возраст которого N лет.
CrashOddsNyrs=NF(Nyrs)NR(Nyrs)
(4)
Где:
NF (NYRS) = Количество аварий с мультивилоковыми или одноиколетными аварий для транспортных средств N года
NR (Nyrs) = Подсчет аварийных сбоев для автомобилей N
550000000000000000 9000 000000 9000 000000000000000 = подсчитывают аварии с задними авариями.
Путем деления вероятности попадания в аварию для транспортного средства возрастом один год на отношение, показанное в уравнении 4, определяется отношение шансов возникновения аварии для транспортного средства возрастом N лет по сравнению с транспортным средством, которому всего один год (см. Уравнение 5).
OddsRatio1yr:Nyrs=CrashOdds(1yr)CrashOdds(Nyrs)
(5)
возрастная группа за пределами годовалых транспортных средств. Каждое отношение шансов, рассчитанное по уравнению 3, корректируется, как показано в уравнении 6. Этот расчет был выполнен для исследуемых транспортных средств по возрасту транспортного средства для рассматриваемого штата. Это скорректированное по возрасту отношение шансов является мерой, представленной в разделе результатов ниже.
OddsRatio(Age)VSC:preVSC=/CrashOdds(1yr)CrashOdds(Nyrs)CrashOdds(VSC)CrashOdds(preVSC)
(6)
СТАНДАРТНЫЕ ОЦЕНКИ ОШИБОК
в уравнении 7. Это стандартная ошибка логарифмического отношения шансов.
σln(R)=∑i=181ni
(7)
Где n i = количество аварий с поправкой на возраст по VSC и категории участия в авариях из уравнений 1 и 2. На основе уравнения 7 это Можно видеть, что небольшие подсчеты либо выборки случаев (столкновение с несколькими автомобилями спереди или одиночное транспортное средство), либо выборки контрольных аварий (удары сзади) значительно увеличат стандартную ошибку представленных отношений шансов. Все доверительные интервалы, представленные ниже, рассчитаны для 95% диапазон.
При расчете шансов для каждого типа аварии, описанного выше, данные были объединены за несколько лет для каждого штата во время расчетов. Данные об авариях в каждом штате были разделены по направлению аварии для транспортных средств, оборудованных и не оборудованных VSC. Кроме того, количество аварий с участием одного транспортного средства было приведено в таблицу для расчетов ниже.
CRASH ODDS
показывает шансы попасть в аварию при лобовом столкновении нескольких транспортных средств. Каждое указанное значение представляет вероятность аварии, при которой процентное снижение аварийности с помощью технологии VSC можно определить с помощью следующего уравнения.
Каждое указанное значение представляет вероятность аварии, при которой процентное снижение аварийности с помощью технологии VSC можно определить с помощью следующего уравнения.
ТАБЛИЦА 4
МУЛЬТИВНЫЕ ВЕРНАЯ ФЕДИЧЕСКАЯ СКРАЩАЯ СВЕДЕНИЯ ВСЕГДА
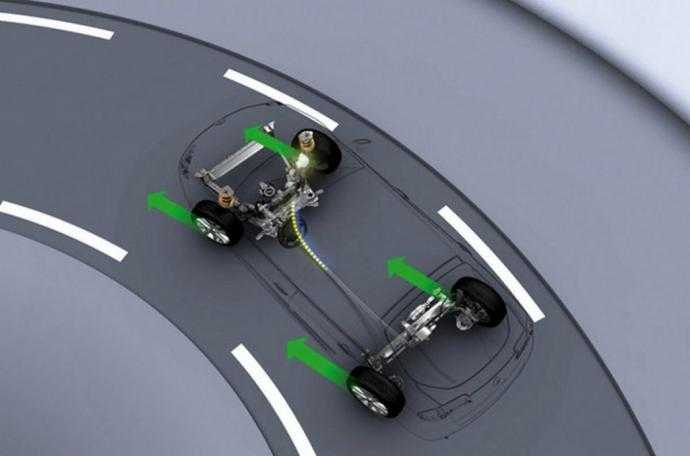 729
729 079
079Open in a separate window
% r e d u c t i o n = 100 ∗ (1 — o D D S R A T I O V S C : P 4 C : P 4 C : P 4 C : P C : P C : P C : P C : P9000 S C : . В S C )
В S C )
(8)
Например, отношение шансов лобового столкновения нескольких транспортных средств по сравнению с ударом сзади с VSC составляет 0,819 для штата Иллинойс, как показано на рис. Это указывает на общее снижение частоты аварий на 18,1% по уравнению 8 для этого состояния. Доверительный интервал 95% указывает на то, что на основе имеющейся информации можно быть уверенным на 95% в том, что истинное снижение скорости находится между нижней границей 72,9% и верхней границей 92,1%. Если этот доверительный интервал охватывает 1,0, в данных не может наблюдаться никакого значительного эффекта, независимо от сообщаемого отношения шансов. Выводы из Флориды, Миссури и Юты были незначительными на основании имеющихся данных о лобовых столкновениях нескольких транспортных средств по сравнению с ударами сзади.
Как указывалось ранее, отношение шансов на основе данных, агрегированных по нескольким штатам, невозможно из-за различий в критериях включения и определениях переменных. Чтобы обобщить отношения шансов, указанные в нескольких запрошенных файлах состояний, представлено общее отношение шансов на основе средневзвешенного значения результатов каждого состояния. Вклад каждого штата в это средневзвешенное значение пропорционален количеству исследуемых транспортных средств, зарегистрированных в каждом штате. Доверительные интервалы рассчитывались путем рассмотрения каждой оценки как простой случайной выборки. При этом может быть вычислено стандартное отклонение оценок отдельных состояний. Из этих стандартных отклонений 9Были получены оценки 5% доверительного интервала. Этот метод, предложенный Кахане (1989), учитывает ошибку выборки внутри штатов, а также различия между штатами в определениях аварий. Это приводит к очень консервативной оценке доверительных интервалов. Общее снижение частоты аварий при лобовых столкновениях нескольких транспортных средств составляет 11,8% (95% ДИ: 2,4%, 21,1%), как показано на рис.
Чтобы обобщить отношения шансов, указанные в нескольких запрошенных файлах состояний, представлено общее отношение шансов на основе средневзвешенного значения результатов каждого состояния. Вклад каждого штата в это средневзвешенное значение пропорционален количеству исследуемых транспортных средств, зарегистрированных в каждом штате. Доверительные интервалы рассчитывались путем рассмотрения каждой оценки как простой случайной выборки. При этом может быть вычислено стандартное отклонение оценок отдельных состояний. Из этих стандартных отклонений 9Были получены оценки 5% доверительного интервала. Этот метод, предложенный Кахане (1989), учитывает ошибку выборки внутри штатов, а также различия между штатами в определениях аварий. Это приводит к очень консервативной оценке доверительных интервалов. Общее снижение частоты аварий при лобовых столкновениях нескольких транспортных средств составляет 11,8% (95% ДИ: 2,4%, 21,1%), как показано на рис.
указывает на среднее снижение частоты аварий с участием одного транспортного средства на 52,6% (95% ДИ: 42,5%, 62,7).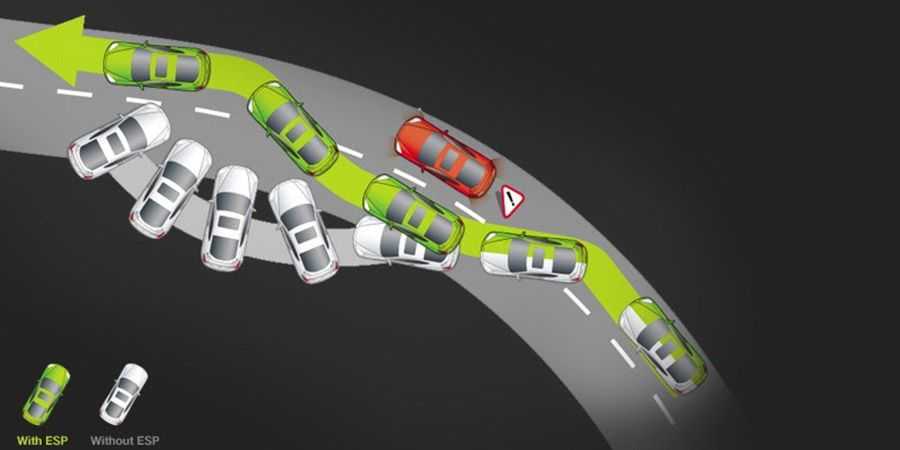 В эту категорию входят аварии, в которых во время столкновения не участвовали другие транспортные средства. Было обнаружено, что эта категория аварий включает в себя наибольшее количество травмированных пассажиров во всех файлах данных штата. Все отношения шансов, о которых сообщают штаты, показывают статистически значимое снижение числа аварий с участием одного транспортного средства.
В эту категорию входят аварии, в которых во время столкновения не участвовали другие транспортные средства. Было обнаружено, что эта категория аварий включает в себя наибольшее количество травмированных пассажиров во всех файлах данных штата. Все отношения шансов, о которых сообщают штаты, показывают статистически значимое снижение числа аварий с участием одного транспортного средства.
Table 5
Single-Vehicle Crash Odds Relative to Rear Impact Crashes
| State | Odds Ratio Single:Rear | SE LN-OR | Lower 95% CI | Upper 95% CI |
|---|---|---|---|---|
| Florida | 0. 554 554 | 0.145 | 0.417 | 0.736 |
| Illinois | 0.571 | 0.119 | 0.452 | 0.720 |
| Maryland | 0.251 | 0.217 | 0.164 | 0.384 |
| Missouri | 0. 473 473 | 0.313 | 0.256 | 0.873 |
| Texas | 0.391 | 0.126 | 0.306 | 0.501 |
| Utah | 0.521 | 0.275 | 0.304 | 0.892 |
| Total | 0. 474 474 | 0.065 | 0,417 | 0,538 |
Открыть в отдельном окне
Метод, использованный в ходе данного исследования для оценки коэффициентов снижения числа аварий благодаря VSC, учитывает подверженность транспортных средств и влияние возраста транспортных средств на вероятность возникновения аварий. В этом методе рассматриваются все случаи аварий, связанные с авариями с ударом сзади. Этот подход требует последовательной отчетности о столкновениях сзади для каждой анализируемой группы аварий. По этой причине невозможно сообщать об общем сокращении сбоев по нескольким файлам состояния. Этот момент важен при анализе файлов данных состояния для VSC, а также других тем исследования.
Вторым важным фактором, который учитывался в этом анализе, было влияние возраста автомобиля на зарегистрированные лобовые и задние удары.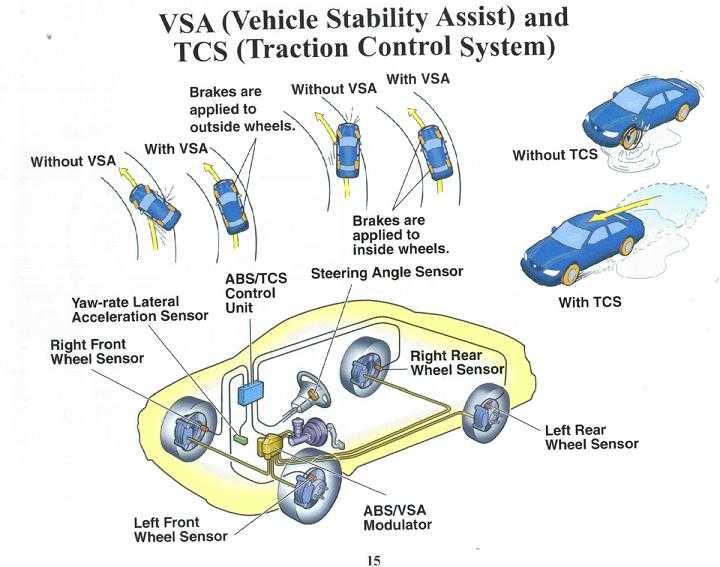 Представленная здесь поправка на возраст должна учитывать этот эффект. Следует отметить, что 84% автомобилей, проанализированных в ходе этого исследования, были в возрасте от 1 до 3 лет. По этой причине влияние возраста на зарегистрированные аварии не было чрезвычайно большим в этой группе населения; поэтому для этого эффекта была сделана поправка. Некоторые седаны Lexus уже 19 модельного года.96 (т.е. в возрасте до 5 лет) присутствовали в популяции аварийно-спасательных служб, предварительно оборудованных VSC.
Представленная здесь поправка на возраст должна учитывать этот эффект. Следует отметить, что 84% автомобилей, проанализированных в ходе этого исследования, были в возрасте от 1 до 3 лет. По этой причине влияние возраста на зарегистрированные аварии не было чрезвычайно большим в этой группе населения; поэтому для этого эффекта была сделана поправка. Некоторые седаны Lexus уже 19 модельного года.96 (т.е. в возрасте до 5 лет) присутствовали в популяции аварийно-спасательных служб, предварительно оборудованных VSC.
Положительное влияние технологии VSC на снижение числа аварий при лобовых столкновениях с несколькими транспортными средствами и одиночных авариях является значительным и обнадеживающим. Однако истинную выгоду от этого эффекта следует рассматривать в контексте снижения материального ущерба, травм и смертности.
Как ранее представили Ага и Окада (2003), технология VSC расширит пределы, в которых водитель будет сохранять контроль над своим транспортным средством. Однако эта технология не предотвратит возникновение всех аварий с потерей управления любой степени серьезности. Соответственно, сокращение на 52% числа аварий с участием одиночных транспортных средств может не привести к такому же сокращению числа аварий с участием одиночных транспортных средств со смертельным исходом или аварий с участием одного транспортного средства с травмами. Несмотря на то, что удастся избежать значительного числа травм и аварий со смертельным исходом, часть этих серьезных случаев потери управления может выйти за пределы динамики, корректируемой системами VSC. Необходим дальнейший анализ характера сбоев, которые сокращаются с помощью технологии VSC, и он станет предметом будущих анализов.
Соответственно, сокращение на 52% числа аварий с участием одиночных транспортных средств может не привести к такому же сокращению числа аварий с участием одиночных транспортных средств со смертельным исходом или аварий с участием одного транспортного средства с травмами. Несмотря на то, что удастся избежать значительного числа травм и аварий со смертельным исходом, часть этих серьезных случаев потери управления может выйти за пределы динамики, корректируемой системами VSC. Необходим дальнейший анализ характера сбоев, которые сокращаются с помощью технологии VSC, и он станет предметом будущих анализов.
Данные о авариях штата США предоставляют ресурс для оценки большого объема информации о авариях, сообщаемой полицией. Эти наборы данных основаны на информации, полученной полицейскими на месте происшествия, и устных рассказах участников аварии. В некоторых случаях отчеты о сбоях составляются через несколько часов после устранения места сбоя. По этим причинам полнота и точность закодированных элементов данных могут вызывать сомнения. Кроме того, от полиции не требуется проводить подробное расследование или реконструкцию аварии, что также может привести к отсутствию информации или неверным предположениям, сделанным офицерами. Понятно и разумно, что основная цель полиции состоит в том, чтобы обеспечить безопасность населения и как можно быстрее восстановить нормальную работу дорог. Сбор данных и отчетность могут стать второстепенными в некоторых ситуациях.
Кроме того, от полиции не требуется проводить подробное расследование или реконструкцию аварии, что также может привести к отсутствию информации или неверным предположениям, сделанным офицерами. Понятно и разумно, что основная цель полиции состоит в том, чтобы обеспечить безопасность населения и как можно быстрее восстановить нормальную работу дорог. Сбор данных и отчетность могут стать второстепенными в некоторых ситуациях.
Представленные здесь результаты аналогичны выводам других исследователей, которые использовали другие аналитические методы. Farmer (2004) указал на 41-процентное сокращение числа аварий с участием одного транспортного средства с учетом воздействия на окружающую среду с использованием данных регистрации транспортных средств. NHTSA сообщила о снижении на 35% для легковых автомобилей и на 67% для внедорожников. Приведенный выше анализ указывает на 52-процентное снижение частоты аварий с участием одного транспортного средства для транспортных средств, оборудованных VSC, с использованием подсчета аварий при столкновении сзади в качестве контроля. Различия в результатах могут быть частично связаны с различиями в исследуемых популяциях транспортных средств. Кроме того, вышеупомянутые исследования включали различные состояния исследования, в которых различные погодные условия и дорожные ситуации могли повлиять на относительное количество случаев, когда стабильность была фактором возникновения аварий. Результаты каждого анализа указывают на измеримую выгоду в снижении количества сбоев при использовании этих систем.
Различия в результатах могут быть частично связаны с различиями в исследуемых популяциях транспортных средств. Кроме того, вышеупомянутые исследования включали различные состояния исследования, в которых различные погодные условия и дорожные ситуации могли повлиять на относительное количество случаев, когда стабильность была фактором возникновения аварий. Результаты каждого анализа указывают на измеримую выгоду в снижении количества сбоев при использовании этих систем.
В этом исследовании было выявлено снижение числа аварий с участием автомобилей, оснащенных VSC, по сравнению с участием в авариях для тех же транспортных средств до того, как эта технология была предложена в качестве стандартного оборудования. Аварии с ударом сзади использовались в качестве контрольной группы для учета воздействия транспортных средств. В этом исследовании также учитывалось влияние возраста транспортного средства на вероятность участия в определенных типах аварий.
В целом было показано, что для транспортных средств, оборудованных VSC, включенных в исследуемую группу, наблюдается снижение на 11,8% (95% ДИ: 2,4%, 21,1%) лобовых столкновений с несколькими транспортными средствами. А 52,6% (95% ДИ: 42,5%, 62,7%) для этих транспортных средств было продемонстрировано снижение частоты аварий с участием одного транспортного средства.
А 52,6% (95% ДИ: 42,5%, 62,7%) для этих транспортных средств было продемонстрировано снижение частоты аварий с участием одного транспортного средства.
На аварии с участием одного транспортного средства или съезда с дороги приходится более 37% смертельных случаев на дорогах США. Часть из этих 14 000 аварий со смертельным исходом происходит из-за потери управления транспортным средством. Результаты этого исследования показывают, что значительную часть столкновений одиночных транспортных средств со смертельным и несмертельным исходом можно предотвратить с помощью повсеместного внедрения технологии контроля устойчивости. Необходим дальнейший анализ для полной количественной оценки соотношения только материального ущерба, аварий с травмами и аварий со смертельным исходом, которые сокращаются при внедрении VSC.
Открыть в отдельном окне
Влияние системы контроля устойчивости автомобиля (VSC) в сценариях избыточной и недостаточной поворачиваемости
Авторы выражают благодарность Toyota Motor Corporation за поддержку этого проекта. Кроме того, особая благодарность выражается FHWA, NHTSA и DOT каждого штата, которые предоставили данные и техническую поддержку для анализа, использованного в этой статье.
Кроме того, особая благодарность выражается FHWA, NHTSA и DOT каждого штата, которые предоставили данные и техническую поддержку для анализа, использованного в этой статье.
- Ага М., Окада А. Анализ эффективности контроля устойчивости транспортного средства (VSC) на основе данных об авариях. Конференция по повышению безопасности транспортных средств, документ № 541; Нагоя, Япония. 2003. [Google Академия]
- Данг Дж. Н. Предварительные результаты анализа эффективности систем электронного контроля устойчивости (ESC). Сентябрь 2004 г. Оценка NHTSA, DOT HS 809–790. [Google Scholar]
- Эванс Л. Антиблокировочная система тормозов и риск различных типов дорожно-транспортных происшествий. Конференция по повышению безопасности транспортных средств, документ № 98-S2-O-12; Виндзор, Канада. 1998. [Google Scholar]
- Farmer CM. Влияние электронного контроля устойчивости на риск автомобильной аварии. Предотвращение дорожно-транспортного травматизма. 2004; 5: 317–325.
 [PubMed] [Академия Google]
[PubMed] [Академия Google] - Кахане CJ. Эффективность центральных высоких стоп-сигналов: предварительная оценка. 1987. Технический отчет NHTSA, DOT HS 807 076. [Google Scholar]
- Лангвидер К. Характеристики автомобильных аварий на этапе до аварии. Материалы Весенней конвенции JSAE, документ № 9932539; 1999. [Google Scholar]
- Sferco R, Page Y, LeCoz J, Fay P. Потенциальная эффективность программ электронной стабилизации (ESP) – что нам говорят европейские полевые исследования. ESV, документ № 2001-S2-O-327; Нидерланды. 2001. [Google Академия]
- Тингвалл С., Крафт М., Куллгрен А., Ли А. Эффективность ESP (программы электронной стабилизации) в снижении числа аварий в реальной жизни. Конференция по повышению безопасности транспортных средств, документ № 261; Нагоя, Япония. 2003. [Google Scholar]
Статьи из Ежегодных отчетов / Ассоциации развития автомобильной медицины предоставлены здесь с разрешения Association for the Advancement of Automotive Medicine
Что означает, если система стабилизации автомобиля .
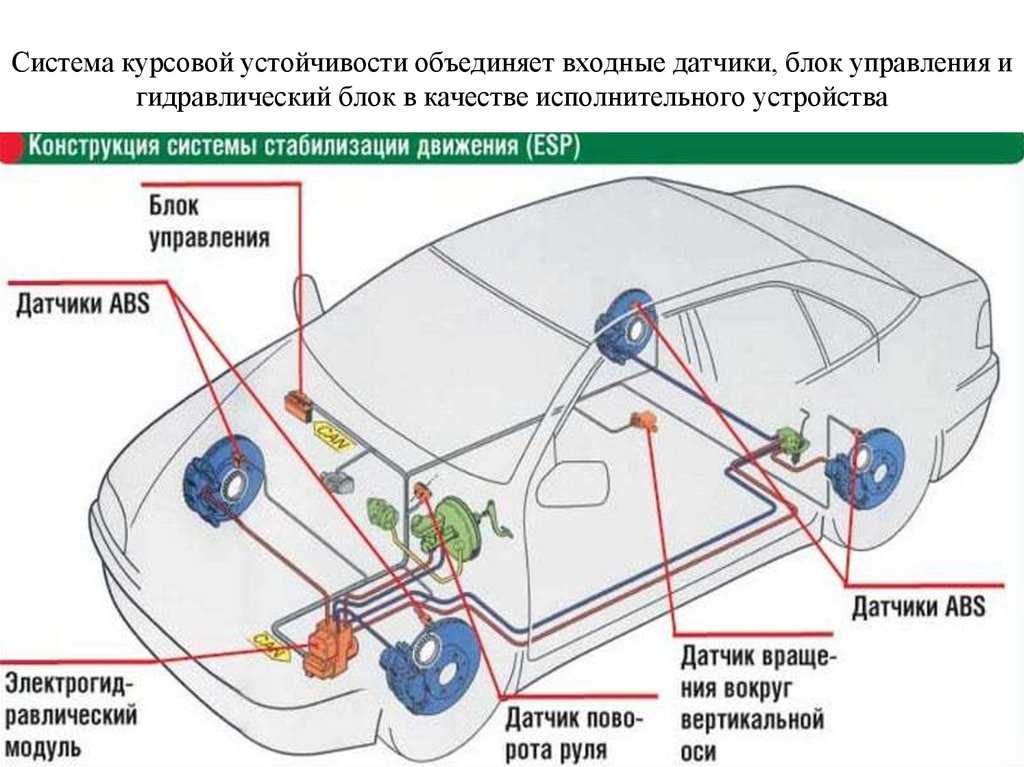 .. Что означает, если система стабилизации автомобиля…
.. Что означает, если система стабилизации автомобиля…Задайте вопрос, получите ответ как можно скорее!
☰
×
ЗАПРОСИТЬ ЦЕНУ
спросил
Хизер Ф
на 15 декабря 2015 г.
Что означает, если на приборной панели загорается индикатор системы стабилизации автомобиля?
| Сэкономьте на ремонте автомобилей | Получить предложение |
Майкл Парра
Автомеханик
27 лет опыта
Ваш автомобиль оснащен системой стабилизации автомобиля (VSA). Он предназначен для обеспечения лучшего сцепления с дорогой на скользких дорогах, а также для предотвращения опрокидывания и других проблем. Вот что вам нужно знать, если на приборной панели загорается индикатор VSA:
Вот что вам нужно знать, если на приборной панели загорается индикатор VSA:
Во время запуска индикатор должен ненадолго загореться. Он должен отключиться в течение нескольких секунд.
Если индикатор VSA мигает, это означает, что система работает, и вам следует вести машину с осторожностью.
Если индикатор VSA загорается постоянно и продолжает гореть, это означает, что с системой что-то не так, и вам необходимо проверить ее.
Заявления, приведенные выше, предназначены только для информационных целей и требуют независимой проверки. Пожалуйста, смотрите наш условия обслуживания подробнее
Получите мгновенную смету для вашего автомобиля
К вам приедут наши сертифицированные механики ・Гарантия на 12 месяцев и пробег 12 000 миль・Справедливые и прозрачные цены
Узнать цену
Механик со стажем?
Зарабатывайте до $70/час
Подать заявку
Что спрашивают другие
В моем масле есть вода, и мне нужно решить эту проблему.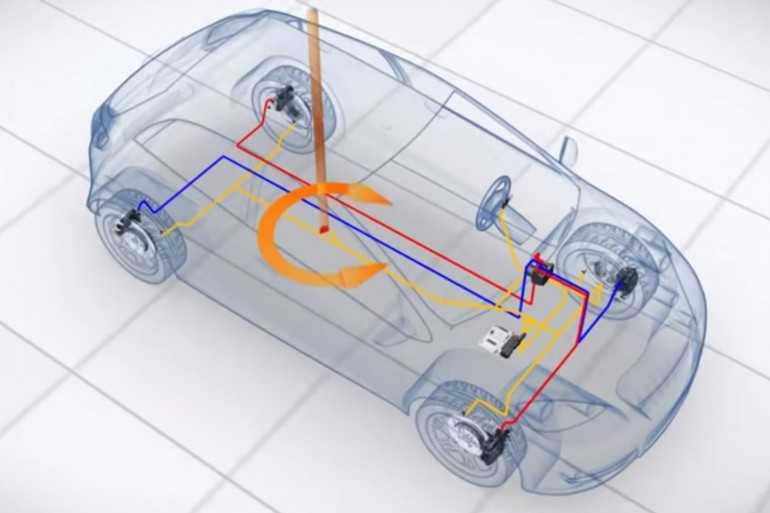
Эту проблему нелегко решить. Я бы не рекомендовал больше водить машину, пока квалифицированный специалист не определит проблему. Вода в масле может быть признаком того, что у вас пробита прокладка ГБЦ…
Как воздух попадает в систему охлаждения
Расширение охлаждающей жидкости в вашей системе охлаждения при нагревании является нормальным явлением. Цель переливного бака проста. Крышка радиатора предназначена для пропуска охлаждающей жидкости в перелив…
Моя машина брызгает, но это не пробитая прокладка, что еще может быть
Привет, спасибо, что написали. Это может быть много разных возможностей, начиная от Проблемы с подачей топлива, возможно, из-за пробитой прокладки ГБЦ. Без дополнительной детализации симптомов может быть сложно поставить диагноз без физического осмотра или взятия…
Может ли установленное в моем автомобиле устройство GPS/слежения привести к неисправности автосигнализации?
Привет. Устройство GPS не может активировать автомобильную сигнализацию, если провод заземления устройства GPS не подключен к той же земле, что и система сигнализации. Если сигнализация полностью…
Устройство GPS не может активировать автомобильную сигнализацию, если провод заземления устройства GPS не подключен к той же земле, что и система сигнализации. Если сигнализация полностью…
Замена заднего ступичного подшипника нуждается в прессовке или нет? Acura RL
2004 года Здравствуйте, если вы замените ступичный подшипник в сборе (https://www.yourmechanic.com/article/is-it-safe-to-drive-with-a-wheel-bearing-gone), нет, нажимать не надо. Это рекомендуемый подход к замене. Для выпрессовки подшипника со ступицы и на нее требуется специальное оборудование, что сопряжено с высоким риском повреждения. Я бы порекомендовал…
Мой будильник постоянно срабатывает, и машина не заводится после замены аккумулятора, что может быть не так?
Здравствуйте, и спасибо, что написали. При решении проблем с сигнализацией и запуском вы действительно имеете дело с недопониманием системы сигнализации. Если у вас есть запасной ключ, попробуйте использовать его, чтобы отключить систему и запустить. ..
..
Я получил диагноз для X6 2012 года, в котором говорится, что пропуски воспламенения из-за неисправной катушки зажигания, и я получил рекомендацию к представителю
Здравствуйте. , и спасибо, что написали. Получить второе мнение — всегда хорошая идея. Замена свечей зажигания является очень необходимой частью технического обслуживания, которой часто пренебрегают. Никогда не помешает заменить…
Обратный огонь под капотом 2008 Chrysler 300
Здравствуйте, это звучит как один или несколько штекерных проводов (https://www.yourmechanic.com/article/how-often-do-spark-plug-wires-need-to-be -changed) не были повторно присоединены в правильном порядке. Это особенно легко сделать на таком двигателе, как ваш, у которого все еще есть штекерные провода, проложенные по всему двигателю.
Передние колеса не чувствуют себя устойчивыми при движении. Черная жидкость, вытекающая из обеих передних шин, дважды залита для балансировки шин
Если вы получаете жидкость из самих шин, то кто-нибудь поместите герметик для спущенных шин, чтобы остановить утечки, и это приведет к тому, что шины не будут сбалансированы, и жидкость будет вытекать из шин. Проверьте шины…
Проверьте шины…
Статьи по Теме
Руководство покупателя GMC Sierra Hybrid 2012 года
Когда Покупая грузовик — даже полутонный, такой как GMC Sierra 1500, — вы рассчитываете найти компромисс между грузоподъемностью и топливной экономичностью, верно? Ну, дизайнеры и инженеры GMC так не считают…
Руководство покупателя Volkswagen Passat TDI 2012 года
Это может выглядеть как обычный Passat, но Volkswagen Passat TDI 2012 года — это практичный седан, который может привести в восторг даже самых заядлых автолюбителей. Почему? Хотя это выглядит как семья среднего размера…
Топ-10 самых продаваемых автомобилей 2016 года
Пикапы Ford F-серии, Toyota Camry и Honda Civic являются одними из самых продаваемых автомобилей 2016 года, и все они доставляют по надежности и эффективности.
Просмотрите другой контент
Техническое обслуживание
Услуги
Смета
Стратегия контроля устойчивости автомобиля, основанная на распознавании намерения водителя повернуть для двухмоторного электромобиля
На этой странице Автомобиль максимально соответствует желаемому состоянию.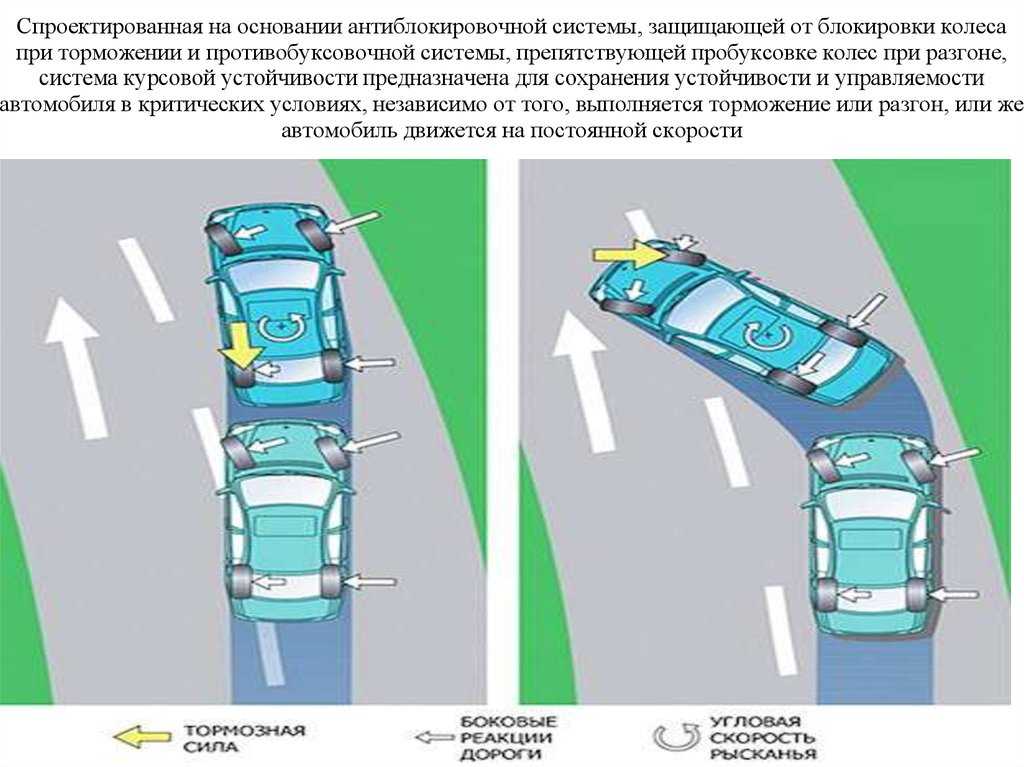 В этой статье предлагается стратегия контроля устойчивости транспортного средства, основанная на распознавании намерения водителя повернуть, для электромобиля с двумя двигателями. Гибридная модель, состоящая из скрытой марковской смеси Гаусса (GHMM) и нейронной сети Generalized Growing and Pruning RBF (GGAP-RBF), построена для распознавания намерения водителя повернуть в режиме реального времени. Коэффициент срочности поворота, который рассчитывается на основе результатов распознавания, используется для создания модифицированной эталонной модели для контроля устойчивости транспортного средства. Затем строится верхний контроллер системы контроля устойчивости транспортного средства с использованием теории прогнозирующего управления линейной модели. В качестве цели оптимизации принимается минимум квадратичной суммы коэффициента рабочей нагрузки шины транспортного средства. В качестве ограничений принимаются состояние сцепления шины с дорогой, характеристики двигателя и тормозной системы, а также состояние двигателя.
В этой статье предлагается стратегия контроля устойчивости транспортного средства, основанная на распознавании намерения водителя повернуть, для электромобиля с двумя двигателями. Гибридная модель, состоящая из скрытой марковской смеси Гаусса (GHMM) и нейронной сети Generalized Growing and Pruning RBF (GGAP-RBF), построена для распознавания намерения водителя повернуть в режиме реального времени. Коэффициент срочности поворота, который рассчитывается на основе результатов распознавания, используется для создания модифицированной эталонной модели для контроля устойчивости транспортного средства. Затем строится верхний контроллер системы контроля устойчивости транспортного средства с использованием теории прогнозирующего управления линейной модели. В качестве цели оптимизации принимается минимум квадратичной суммы коэффициента рабочей нагрузки шины транспортного средства. В качестве ограничений принимаются состояние сцепления шины с дорогой, характеристики двигателя и тормозной системы, а также состояние двигателя. Кроме того, для системы контроля устойчивости автомобиля устанавливается нижний контроллер, задачей которого является оптимизация распределения дополнительного момента рыскания. Наконец, были проведены тесты транспортных средств путем проведения экспериментов по смене двух и одной полосы движения на платформе для электромобилей с двумя двигателями с использованием виртуального контроллера аппаратного обеспечения A&D5435. Результаты показывают, что система контроля устойчивости работает надлежащим образом, используя эту стратегию управления, и эффективно улучшает устойчивость автомобиля.
Кроме того, для системы контроля устойчивости автомобиля устанавливается нижний контроллер, задачей которого является оптимизация распределения дополнительного момента рыскания. Наконец, были проведены тесты транспортных средств путем проведения экспериментов по смене двух и одной полосы движения на платформе для электромобилей с двумя двигателями с использованием виртуального контроллера аппаратного обеспечения A&D5435. Результаты показывают, что система контроля устойчивости работает надлежащим образом, используя эту стратегию управления, и эффективно улучшает устойчивость автомобиля.
1. Введение
Контроль устойчивости транспортного средства, основанный на работе антиблокировочной тормозной системы (ABS) и противобуксовочной системы (TCS) транспортного средства, играет важную роль в предотвращении аварий с участием одного транспортного средства, вызванных неустойчивостью транспортного средства [1]. Механическая структура, динамические характеристики, характеристики отклика и сложность привода электромобиля с двумя двигателями значительно отличаются от таковых у автомобиля с одним приводом. Поэтому для электромобилей с двойным приводом также требуется эффективная и стабильная система контроля устойчивости.
Поэтому для электромобилей с двойным приводом также требуется эффективная и стабильная система контроля устойчивости.
В зависимости от структуры системы используются два типа контроллеров системы устойчивости автомобиля: централизованные и иерархические. По сравнению с централизованным контроллером система иерархического контроллера обладает превосходной расширяемостью и отказоустойчивостью, а также обеспечивает более удобное обслуживание и отладку системы [2, 3]. Кроме того, гораздо более высокий уровень интеграции шасси электрификации автомобиля позволяет реализовать координационный контроль с другими системами, такими как X — проводная система управления и активные системы безопасности, например, электрическое управление торможением (ECB), электрическое распределение тормозного усилия (EBD) и активное переднее рулевое управление (AFS).
На основании текущего состояния автомобиля и намерения водителя верхний уровень иерархического контроллера устойчивости автомобиля принимает решение о дополнительном моменте рыскания для восстановления устойчивого состояния автомобиля. Чжан и Ван предложили систему контроля устойчивости транспортного средства, использующую управление обобщенной пропорциональной интеграцией (PI) [4]. Ван и др. разработал стратегию управления устойчивостью на основе интегрально-разделительного ПИД-регулятора для устранения интегрального накопления в системе управления [5]. Чжао и др. разработали систему контроля устойчивости автомобиля на основе нечеткой модели T-S [6, 7]. Некоторые ученые также приняли надежный контроль, чтобы уменьшить влияние неопределенных факторов, таких как потери в системе, колебания нагрузки на шины и боковой ветер [8-12]. Однако ПИД-алгоритм не гарантирует ни оптимального управления системой, ни устойчивости ее управления. Правила нечеткого управления устанавливаются на основе большого количества экспериментов и опыта экспертов и нуждаются в корректировке в соответствии с условиями вождения, что требует больших временных и экономических затрат. Наиболее заметным недостатком управления режимом скольжения является вибрация, которая возникает, когда система приближается к поверхности режима скольжения, и которую можно только уменьшить, но не устранить.
Чжан и Ван предложили систему контроля устойчивости транспортного средства, использующую управление обобщенной пропорциональной интеграцией (PI) [4]. Ван и др. разработал стратегию управления устойчивостью на основе интегрально-разделительного ПИД-регулятора для устранения интегрального накопления в системе управления [5]. Чжао и др. разработали систему контроля устойчивости автомобиля на основе нечеткой модели T-S [6, 7]. Некоторые ученые также приняли надежный контроль, чтобы уменьшить влияние неопределенных факторов, таких как потери в системе, колебания нагрузки на шины и боковой ветер [8-12]. Однако ПИД-алгоритм не гарантирует ни оптимального управления системой, ни устойчивости ее управления. Правила нечеткого управления устанавливаются на основе большого количества экспериментов и опыта экспертов и нуждаются в корректировке в соответствии с условиями вождения, что требует больших временных и экономических затрат. Наиболее заметным недостатком управления режимом скольжения является вибрация, которая возникает, когда система приближается к поверхности режима скольжения, и которую можно только уменьшить, но не устранить. Управление с прогнозированием моделей (MPC) может напрямую учитывать ограничения привода и ограничения состояния системы во время проектирования контроллера. Кроме того, MPC может эффективно управлять многокритериальной системой с ограничениями в сложных инженерных системах и обладает высокой переносимостью [13]. Джалали и др. предложил регулятор устойчивости транспортного средства с использованием MPC [14–17]. И желаемая скорость рыскания и угол бокового скольжения были получены через угол поворота рулевого колеса водителя.
Управление с прогнозированием моделей (MPC) может напрямую учитывать ограничения привода и ограничения состояния системы во время проектирования контроллера. Кроме того, MPC может эффективно управлять многокритериальной системой с ограничениями в сложных инженерных системах и обладает высокой переносимостью [13]. Джалали и др. предложил регулятор устойчивости транспортного средства с использованием MPC [14–17]. И желаемая скорость рыскания и угол бокового скольжения были получены через угол поворота рулевого колеса водителя.
Нижний уровень контроллера устойчивости транспортного средства выбирает соответствующий исполнительный механизм и перераспределяет дополнительный момент рыскания на основе определенных правил. В настоящее время наиболее часто используемый метод основан на двух стратегиях распределения: на основе правил и на основе теории оптимизации [18]. Увеличение количества исполнительных механизмов и растущая сложность электронных систем управления транспортными средствами привели к тому, что правила распределения стали более сложными; следовательно, точность распределения не может быть гарантирована в той же степени, что и раньше. Поэтому стратегия распределения, основанная на теории оптимизации, является более подходящей.
Стратегия распределения, основанная на теории оптимизации, обычно принимает в качестве целей оптимизации скорость проскальзывания шины, минимум суммы рабочей нагрузки шины и минимум суммы продольной силы шины. В то же время постепенно выдвигается стратегия оптимизации, учитывающая отказ привода и экономию энергии. Инь предложил дополнительную стратегию распределения момента рыскания и силы тяги с целью минимизации нагрузки на шину [19].]. Чжай и др. предложили среднюю стратегию распределения крутящего момента, стратегию распределения крутящего момента на основе динамической нагрузки на шину и стратегию оптимального распределения крутящего момента на основе минимальной целевой функции для управления крутящим моментом двигателя или рекуперативным тормозным моментом для повышения устойчивости транспортного средства [20]. Парк и др. предложил стратегию распределения крутящего момента, которая учитывает экономику вождения, потребность водителя в ускорении и проскальзывание шин, и использовала нечеткую логику для выбора подходящей стратегии распределения [21]. Ким и Ким выбрали рекуперативное торможение и электрогидравлический тормоз в качестве исполнительных механизмов в контроллере устойчивости автомобиля. С целью минимизации энергопотребления ЭВП был оптимизирован коэффициент распределения тормозных сил на переднюю и заднюю оси [22].
Согласно приведенным выше исследованиям, иерархический контроллер устойчивости транспортного средства получает желаемое состояние вождения, используя угол поворота рулевого колеса водителя. Однако углубленные исследования показали, что использование только угла поворота рулевого колеса недостаточно для выражения намерения водителя и получения контроллером устойчивости желаемого состояния вождения.
Намерение водителя совершить поворот инициируется на основе опыта в зависимости от состояния дороги, окружающей среды и состояния автомобиля. Затем водитель манипулирует исполнительным механизмом транспортного средства таким образом, чтобы транспортное средство реагировало в соответствии с его намерением. Таким образом, намерение водителя повернуть отражает его субъективную потребность в состоянии транспортного средства. Когда водители совершают крутые повороты, такие как непрерывный S-поворот, крутой поворот и другие дороги с меньшим радиусом кривизны, а также аварийный обход препятствия или внезапный обгон, считается, что водитель намеревается быстро маневрировать транспортным средством. в текущих дорожных условиях, что также означает, что у водителя есть определенные ожидания в отношении скорости рыскания и бокового скольжения автомобиля. Однако для некоторых водителей из-за ограничений, таких как их опыт вождения, условия вождения, теоретические знания и другие факторы, это ожидание игнорирует правильную оценку устойчивости транспортного средства при поперечном движении. В процессе контроля устойчивости транспортного средства, если существует значительная разница между фактическим и ожидаемым состоянием транспортного средства, водитель продолжит операцию поворота, а устойчивость транспортного средства ухудшится и даже вызовет недоверие водителя к системе.
Таким образом, точная интерпретация и прогнозирование намерений вождения в процессе контроля устойчивости транспортного средства и обеспечение того, чтобы фактическое состояние транспортного средства поддерживалось как можно ближе к ожидаемому состоянию транспортного средства, значительно улучшило бы устойчивость и безопасность вождения транспортного средства. Намерение водителя может быть получено с помощью нечетких рассуждений, метода опорных векторов (SVM), искусственной нейронной сети (ANN) и скрытой марковской модели (HMM) [23–27]. Нечеткие рассуждения, SVM и ANN используются для распознавания намерений водителя в определенный момент. Однако нейронная сеть и нечеткая логика плохо справляются с информацией, упорядоченной во времени. Таким образом, они в основном используются для статических задач распознавания. HMM, как разновидность метода динамической обработки информации, основанного на кумулятивной вероятности временного ряда, рассматривает только последовательность состояний с максимальной логарифмической вероятностью и игнорирует возможность событий малой вероятности. Поэтому с помощью HMM трудно распознать легко спутанные намерения.
Все вышеизложенное побудило нас разработать метод определения намерения водителя совершить поворот, установить коэффициент срочности рулевого управления для резкого поворота и предложить эталонную модель контроля устойчивости транспортного средства с учетом намерения водителя совершить поворот. Основываясь на вышеупомянутых результатах, мы предложили стратегию контроля устойчивости для двухмоторного электромобиля. В результате этого исследования желаемая цель контроля устойчивости больше не основывается только на угле поворота рулевого колеса, а состояние транспортного средства в соответствии с намерением вождения в определенной степени находится под контролем. Эта статья организована следующим образом. Метод определения намерения водителя повернуть представлен в разделе 1. Модифицированная эталонная модель устойчивости транспортного средства с учетом намерения водителя повернуть представлена в разделе 2. Построение стратегии контроля устойчивости транспортного средства на основе модифицированной эталонной модели обсуждается в разделе 3. В разделе 4 сравнивается стратегия контроля устойчивости транспортного средства на основе модифицированной эталонной модели, построенной в данной работе, с традиционной стратегией. Наконец, в Разделе 5 представлены выводы этого исследования.
2. Гибридная модель распознавания намерения водителя совершить поворот на основе нейронной сети GHMM и GGAP-RBF
Операция поворота представляет собой сложное событие, которое продолжается в течение определенного периода времени. Последовательность наблюдения за процессом поворота представляет собой набор временных данных. Скрытая марковская модель Гаусса (GHMM) демонстрирует сильные возможности моделирования для динамических временных последовательностей. Однако модель не учитывает совпадения между разными классами, и это серьезное ограничение. Напротив, инженерная модель обобщенного роста и обрезки RBF (GGAP-RBF) может имитировать механизм мышления человеческого мозга, обладает сильными способностями к классификации и принятию решений и может описывать неопределенную информацию. Таким образом, он компенсирует недостатки HMM. Кроме того, модель позволяет удалять несущественные нейроны в каждом итерационном цикле обучения, чтобы эффективно контролировать рост нейронной сети и упростить структуру сети с большой емкостью данных. Однако способность GGAP-RBF описывать динамические последовательные процессы не особенно сильна [28–30]. Это привело нас к созданию гибридной модели в виде нейронной сети GHMM/GGAP-RBF. Учитывая преимущества построения последовательной модели и ее способность к нелинейному отображению, гибридная модель может получать вновь идентифицированную информацию, тем самым значительно повышая точность классификации классов с небольшими различиями [27]. В то же время, чтобы улучшить производительность в реальном времени, эта работа использует начальный этап операции поворота, чтобы определить намерение водителя повернуть.
Структура системы распознавания намерения водителя совершить поворот на основе гибридной модели GHMM/GGAP-RBF представлена на рисунке 1. Гибридная модель включает нижний уровень (модель GHMM) и верхний уровень (модель GGAP-RBF) . Нижний слой модели включает GHMM крутого поворота и GHMM нормального поворота. Скорость транспортного средства, угол поворота рулевого колеса, угловая скорость рулевого колеса и крутящий момент на рулевом колесе являются входными данными нижнего уровня. Логарифмическая вероятность резкого поворота GHMM и нормального поворота GHMM являются выходными данными нижнего уровня. На основе данных начальной стадии поворота строятся ГГММ нормального поворота и резкого поворота и обучаются с использованием алгоритма Баума-Уэлча для расчета наиболее вероятной последовательности состояний. Кроме того, прямой алгоритм используется для расчета логарифмической вероятности GHMM.
В верхнем слое логарифмическое правдоподобие GHMM, скорость рыскания транспортного средства и поперечное ускорение образуют вектор . Нелинейная комбинация этого вектора считается входом нейронной сети GGAP-RBF, а способность нелинейного отображения методов на основе нейронных сетей используется для распознавания фактического намерения водителя повернуть.
2.1. Внедрение GHMM
Характерные параметры гибридной модели GHMM/GGAP-RBF оказывают значительное влияние на точность распознавания поворота водителя. Алгоритм рельефа используется для сбора соответствующих параметров. В этом исследовании угол поворота рулевого колеса, угловая скорость рулевого колеса и крутящий момент на рулевом колесе используются в качестве параметров характеристик для распознавания намерения водителя управлять автомобилем. Исходя из начального этапа токарной операции, GHMM для острого и нормального точения устанавливаются отдельно. Последовательность наблюдений ГГММ может быть описана в виде многомерного вектора [31]: где – угол поворота рулевого колеса, – крутящий момент на рулевом колесе, – угловая скорость рулевого колеса.
Алгоритм Баума-Уэлча используется для оптимизации трех параметров GHMM, которые описываются как , где — начальное распределение состояний, A — матрица вероятности перехода состояния, а B — функция плотности вероятности.
Функция плотности вероятности модели – это j -мерная плотность вероятности Гаусса состояния i , последовательность наблюдений, среднее значение функции Гаусса и ковариация функции Гаусса.
Предполагая, что это вероятность j -й смешанной функции Гаусса в последовательности наблюдения состояния в момент времени , вероятность того, что цепь Маркова находится в состоянии в момент времени, будет следующей: где — средняя матрица смешанной функции Гаусса, — смешанная ковариационная матрица, а — вес выходных вероятностей различных смешанных функций Гаусса. На основе смешанной модели Гаусса переоценка параметров выглядит следующим образом:
После оптимизации параметров GHMM соответствие между собранными данными и GHMM вычисляется с использованием алгоритма прямого-обратного.
2.2. Создание нейронной сети GGAP-RBF
Чтобы гарантировать, что события с малой вероятностью также могут произойти, функция (5) больше не используется для распознавания намерения поворота. Вместо этого намерение поворота описывается как функция логарифмической вероятности двух GHMM с заданными тестовыми данными ( и ), скоростью рыскания транспортного средства и боковым ускорением, выраженным следующим образом:
Входной параметр входного слоя , , , и , как показано в уравнении (7). Результатом слоя является намерение водителя повернуть, как показано в уравнении (8): где , , и представляют стандартизацию отклонения , , , и ; является центром РФБ к -й нейрон; и представляет собой стандартное отклонение функции Гаусса, которое указывает ширину функции Гаусса.
После i -й итерации обучения RAN используется для оптимизации роста нейронов. Параметры нейрона при добавлении нового нейрона задаются следующим образом [32–35]: где – вес, соединяющий новый нейрон с выходным нейроном; — центр нового нейрона; – ширина нового нейрона; – ошибка априорной оценки; — коэффициент перекрытия, определяющий перекрытие ответов скрытых нейронов во входном пространстве; и – значение центра скрытого нейрона, ближайшего к .
Ценность нового нейрона оценивается с использованием условий неравенства (10). Если условия соблюдены, новые обучающие данные ценны для сети, и новый нейрон эффективно улучшает производительность сети. В результате добавляется новый нейрон и принимаются обучающие данные. Если нет, то обучающие данные и новый нейрон отбрасываются, где и – пороговое значение расстояния и ошибки соответственно; – значение центра скрытого нейрона, ближайшего к ; и – ошибка априорной оценки.
Затем следует оценить несущественный нейрон и удалить его с помощью алгоритма обрезки. Среднеквадратическая ошибка выходных данных предсказания после удаления k -го нейрона из сети на i -й итерации обучения следующим образом: -й скрытый нейрон.
Входные данные RBF, , , , и следуют нормальному выборочному распределению соответственно. Модельный ряд i -е тренировочные данные имеют размер X , который разделен на равные мелкие части. При стремлении к бесконечности сумма по диапазону выборки становится примерно равной интегральной величине. этого нейрона ко всей сети и является функцией распределения вероятностей. Если E sig ( k ) меньше точности обучения e min нейрон считается незначимым и удаляется. В противном случае нейрон является значимым и должен быть сохранен. Поскольку из нейронной сети GGAP-RBF можно удалить несущественные нейроны, размер сети можно ограничить разумным диапазоном.
2.3. Создание модели GHMM/GGAP-RBF
Создание модели GHMM/GGAP-RBF требует автономного обучения с использованием тестовых данных, для которых получены в эксперименте с реальным транспортным средством.
Опыт вождения, пол и личность могут повлиять на принятие решения водителем. С целью исключения влияния водителей на результаты теста выбираются три водителя с разным стажем вождения. Согласно анализу Спецификации проектирования городских дорог (CJJ37-2012), Спецификации проектирования взаимодействий на городской дороге (CJJ152-2010) и Метода испытаний на устойчивость при управлении транспортным средством (GB/T6323-2 2014), радиус поворота длина тестовой дороги составляет 10 м, 25 м, 40 м и 60 м. Радиус поворота тестовой дороги устанавливается равным 10 м, 25 м, 40 м и 60 м. И тестовая скорость установлена как 20 км/ч, 30 км/ч и 40 км/ч. Чтобы отличить прямолинейное движение от поворота, тесты на прямолинейное вождение также проводятся на скоростях 20, 30 и 40 км/ч. Распределение тестовых данных показано в таблице 1.
Параметры автомобиля показаны в таблице 2. Из-за шума в данных датчиков, собранных прибором сбора данных, данные необходимо предварительно обработать. T — тестирование используется для удаления аномальных данных. Затем используется метод смешанной гауссовской кластеризации для извлечения данных, относящихся к начальному этапу операции токарной обработки как части всего процесса токарной обработки. Эти предварительно обработанные данные можно разделить на две части. 75% тестовых данных используются для обучения модели в автономном режиме, а остальные используются для онлайн-проверки модели. После автономного обучения можно было получить матрицу начального состояния, матрицу перехода состояния, вес каждой функции Гаусса в GHMM, среднее значение и ковариацию каждой функции Гаусса, а также параметры GGAP-RBF.
3. Эталонная модель системы контроля устойчивости транспортного средства с учетом намерений водителя
В этом документе предлагается эталонная модель для контроля устойчивости транспортного средства. Модель, учитывающая намерение водителя выполнить поворот, показана на рис. 2. Во-первых, гибридная модель GHMM/GGAP-RBF используется для распознавания намерения водителя выполнить поворот на основе данных, относящихся к работе рулевого колеса: угол, угловая скорость и крутящий момент на рулевом колесе. Когда на начальном этапе операции поворота намерение водителя идентифицируется как резкий поворот, транспортное средство заставляют быстро реагировать на желаемую скорость рыскания для текущего угла поворота рулевого колеса (т.е. скорость поворота может следовать за рулевым колесом водителя). успешная эксплуатация) путем корректировки эталонной скорости рыскания с помощью установленного коэффициента срочности руления. Когда операция рулевого управления переходит в стадию поддержания поворота и стадию реверсирования поворота, устойчивость транспортного средства обеспечивается за счет того, что эталонная скорость рыскания больше не изменяется. Эталонная модель не модифицируется, если предполагается обычное точение.
3.1. Эталонная модель, основанная на линейной динамической модели транспортного средства с двумя степенями свободы
Наиболее часто используемой эталонной моделью контроля устойчивости транспортного средства является линейная динамическая модель транспортного средства с двумя степенями свободы, которая учитывает только боковое движение и рысканье транспортного средства [36]. Уравнения состояния имеют следующий вид:
Таким образом, идеальная скорость рыскания и угол бокового скольжения будут следующими:
Когда автомобиль движется по дороге с низким коэффициентом сцепления, например, когда поверхность дороги мокрая или покрыта снегом или песок, сила сцепления, допускаемая условиями сцепления между поверхностью дороги и шинами, уменьшается и не может обеспечить высокую скорость рыскания, необходимую для транспортного средства. Следовательно, когда линейная динамическая модель транспортного средства с двумя степенями свободы принимается в качестве идеальной модели, она должна быть ограничена условиями, при которых шины сцепляются с дорогой.
Верхняя граница идеальной скорости рыскания равна
Следовательно, эталонное значение скорости рыскания автомобиля для стационарного рулевого управления равно
Аналогично, верхняя граница идеального угла бокового скольжения должна большой. Верхняя граница угла бокового скольжения составляет
. Таким образом, эталонное значение угла бокового скольжения для стационарного рулевого управления составляет
. получить.
3.2. Эталонная модель с учетом намерения водителя
Как упоминалось в разделе 1, для одного и того же угла угловая скорость и крутящий момент рулевого колеса могут использоваться в качестве характеристических параметров для распознавания намерения водителя выполнить поворот. Таким образом, угловая скорость и крутящий момент на рулевом колесе принимаются в качестве параметров для определения коэффициента срочности рулевого управления для резкого намерения поворота.
Когда транспортное средство совершает установившийся поворот, соотношение между крутящим моментом на рулевом колесе и градиентом поперечного ускорения удовлетворяет [37]
Следовательно, в соответствии с фактическим поперечным ускорением идеальный крутящий момент на рулевом колесе для установившегося поворота можно рассчитать как
Согласно уравнению (21) и модели системы рулевого управления можно использовать фактическую скорость и скорость рыскания для расчета идеальной угловой скорости рулевого колеса путем дифференцирования
Отклонение между фактическим крутящим моментом и угловой скоростью и идеальным крутящим моментом и угловой скоростью рулевого колеса используется для отражения срочности намерения водителя совершить резкий поворот. Наконец, коэффициент срочности рулевого управления для намерения резкого поворота рассчитывается по следующему уравнению: где , , , и представляет собой нормализованный фактический крутящий момент на рулевом колесе, фактическую угловую скорость, идеальный крутящий момент на рулевом колесе и идеальную угловую скорость с использованием следующего уравнения, чтобы избежать влияние, вызванное различными размерами каждого параметра.
При эталонная скорость рыскания определяется динамическими характеристиками транспортного средства, и ограничение, обусловленное сцеплением с дорогой, не достигается. Если в то же время намерением водителя является резкий поворот, эталонная скорость рыскания будет изменена следующим образом: где коррекция эталонной скорости рыскания с учетом намерения водителя повернуть и связана со срочностью намерения водителя повернуть.
При эталонная скорость рыскания определяется динамическими характеристиками транспортного средства, а также достигается ограничение, обусловленное сцеплением с дорогой. Если уравнение (25) по-прежнему принимается для модификации, эталонная скорость рыскания может превысить ограничение. Таким образом, при этом условии эталонная скорость рыскания будет изменена следующим образом:
При эталонная скорость рыскания определяется состоянием сцепления с дорогой. В целях обеспечения безопасности вождения эталонная скорость рыскания больше не изменяется.
Таким образом, для намерения резкого поворота эталонная скорость рыскания равна
Когда операция поворота достигает второй стадии — стадии удержания и третьей стадии — стадии возврата, эталонная скорость рыскания больше не изменяется ради вождения безопасность. Преобразование модифицированной модели в эталонную модель вызывает внезапное изменение эталонной скорости рыскания, и это, скорее всего, повлияет на устойчивость транспортного средства. Чтобы сделать опорную скорость рыскания более плавной, в качестве функции перехода выбрана S-образная кривая разгона и торможения, показанная на рис. 3 [38].
Когда неравенство выполняется, измененная эталонная скорость рыскания равна
Последовательность вычислений для получения эталонной скорости рыскания показана на рисунке 4.
4. Стратегия контроля устойчивости автомобиля Привод электромобиля имеет иерархическую структуру, которая включает в себя контроллер верхнего уровня — с уровнем принятия решений для дополнительного момента рыскания — и контроллер нижнего уровня — с уровнем распределения для дополнительного момента рыскания. Структура этой системы показана на рис. 5.9.0005
Контроллер верхнего уровня включает в себя модель оценки состояния транспортного средства, модель распознавания намерения водителя совершить поворот, модифицированную эталонную модель контроля устойчивости и дополнительную модель принятия решения по моменту рыскания. Этот контроллер выбирает угол, угловую скорость и крутящий момент рулевого колеса в качестве входных данных, чтобы распознать намерение водителя повернуть. Эталонная скорость рыскания и эталонный угол бокового скольжения при установившемся рулевом управлении определяются с использованием линейной модели динамики транспортного средства с двумя степенями свободы и одновременным учетом условий сцепления. В соответствии с намерением поворота эталонная модель модифицируется как конечная цель контроля устойчивости. Затем, на основе разницы между фактической и эталонной скоростью рыскания и углом бокового скольжения, используя модель принятия решения о дополнительном моменте рыскания, определяется дополнительный момент рыскания, который необходимо приложить для приведения транспортного средства в устойчивое состояние, и используется в качестве входных данных для нижний контроллер.
Контроллер нижнего уровня — дополнительный слой распределения момента рыскания — включает в себя модель распределения продольной силы и модель исполнительного механизма. Создание дополнительного момента рыскания требует контроля продольной силы шины, и это должно учитывать форму привода транспортного средства, работу двигателя и гидравлической тормозной системы, а также дорожные условия. Алгоритм оптимизации выделяет дополнительный момент рыскания, чтобы получить дополнительный крутящий момент двигателя и гидравлической тормозной системы, что в конечном итоге улучшит устойчивость автомобиля.
4.1. Конструкция верхнего контроллера системы курсовой устойчивости
MPC используется для принятия решения о дополнительных моментах рыскания. В качестве прогностической модели выбрана линейная модель динамики транспортного средства с тремя степенями свободы, включающая продольное движение, поперечное движение и рысканье. получить, как показано в уравнении (30)–(32) [39, 40]. Как для точности, так и для эффективности, для оценки жесткости шины, которая будет использоваться для расчета поперечной силы шины в режиме реального времени, используется оценщик жесткости шины на поворотах, основанный на рекурсивном методе наименьших квадратов с коэффициентом забывания (FFRLS). Затем расчетная жесткость шины при прохождении поворотов применяется к линейной динамической модели. Это повышает эффективность системы управления в нелинейной области шины [41].
Уравнение состояния может быть выражено в стандартной форме следующим образом: где , , , дополнительный момент рыскания, и .
Уравнение (33) дискретизируется и преобразуется в инкрементальную форму, чтобы получить где , , , , , , и – контрольный период.
Целью контроля устойчивости автомобиля является обеспечение фактической скорости рыскания и угла бокового скольжения автомобиля в соответствии с эталонным значением за счет действия дополнительного момента рыскания. Следовательно, в момент времени задача оптимизации МПК на основе линейной модели может быть описана как
Ограничения управляющих переменных, приращение переменных и выходные данные модели следующие:
В этой модели горизонт прогнозирования , горизонт управления и эталон прогнозирующей модели .
Желаемая производительность управления может быть скорректирована с помощью весовой матрицы и , где отражает требования к точности системы и размер действия, требуемого контроллером.
В этом исследовании
Как показано в уравнении (38), представляет собой приращение последовательности управляющих входных данных, которое получается с использованием цели оптимизации и ограничений в течение времени дискретизации , и представляет собой управляющую выходную последовательность, которая полученный из прогнозной модели.
Наконец, к системе применяется только первый элемент оптимизированного решения. Таким образом, дополнительный момент рыскания выражается следующим уравнением:
4.2. Конструкция нижнего контроллера для контроля устойчивости автомобиля
Контроллер нижнего уровня распределяет продольные силы каждого колеса в соответствии с выходными данными дополнительного уровня принятия решений по крутящему моменту. Распределение ограничено условиями сцепления между шиной и дорогой. Следует избегать чрезмерной дополнительной продольной силы, которая вызывает продольное скольжение и еще больше ухудшает устойчивость автомобиля. Эта сила ограничена работой двигателя и тормозной системы. Чрезмерный дополнительный крутящий момент вызывает перегрузку двигателя и механической тормозной системы. Крутящий момент также ограничен рабочим состоянием двигателя; поэтому следует избегать состояния отказа системы, при котором двигатель не может обеспечить тормозное усилие. При вышеуказанных ограничениях распределенная продольная сила должна удовлетворять потребности в дополнительном моменте рыскания.
4.2.1. Задача оптимизации
Продольные и поперечные силы, которые может создавать шина, ограничены вертикальной нагрузкой. Поскольку продольная сила каждой шины должна распределяться в соответствии с вертикальной нагрузкой, можно ожидать, что колеса с более высоким сцеплением будут играть более важную роль. Таким образом, цель оптимизации состоит в том, чтобы минимизировать сумму квадратов коэффициента рабочей рабочей нагрузки каждой шины. Из-за ограничений, накладываемых практическими условиями, боковая сила колес не может контролироваться напрямую. В этом исследовании продольная сила шин контролируется для создания дополнительного момента рыскания. Таким образом, цель оптимизации выражается следующим уравнением:
4.2.2. Ограничения оптимизации
(1) Ограничения равенства . Стратегия распределения дополнительного момента рыскания должна не только минимизировать сумму рабочей нормы нагрузки, но и обеспечивать соответствие продольной силы требованиям операций торможения и разгона водителя, а также соответствие дополнительного момента рыскания требованиям верхнего контроллера. .
(2) Ограничение неравенства . (1) Ограничение условия сцепления: когда распределяется дополнительный момент рыскания, необходимо убедиться, что продольные и поперечные силы шины находятся в пределах эллипса сцепления шины, чтобы избежать продольного и поперечного проскальзывания транспортного средства. (2) Работа двигателя и тормозной системы. ограничения: дополнительная продольная сила также ограничена производительностью приводов. Дополнительная продольная сила двух задних ведущих колес ограничена мощностью приводного двигателя. Два неведущих передних колеса могут обеспечивать только тормозное усилие; таким образом, дополнительное продольное усилие четырех колес ограничивается работой механической тормозной системы.
Тормозной момент, генерируемый двигателем, ограничен характеристиками двигателя, которые не могут превышать максимальный предел крутящего момента, определяемый мощностью, генерируемой при текущей скорости. Большие динамические колебания тормозного момента двигателя и обратная пропорция между максимальным тормозным моментом и скоростью не позволяют двигателю генерировать адекватную величину обратной электродвижущей силы, так что тормозная сила, создаваемая двигателем, становится неэффективной. Из-за больших динамических колебаний тормозного момента двигателя и обратной пропорции между максимальным тормозным моментом и скоростью, обратная электродвижущая сила, создаваемая двигателем, слишком мала, когда двигатель работает на низкой скорости. Двигатель не может создать эффективное тормозное усилие. Поэтому в качестве порога скорости устанавливается 500 об/мин. Когда скорость ниже порогового значения, система больше не использует торможение двигателем. Следовательно, тормозной момент двигателя должен соответствовать ограничению, представленному в следующем уравнении: [42].
В то же время, отказ управляющего сигнала, отказ силового преобразователя, нарушение изоляции и другие виды отказов двигателя могут возникать из-за дефектов конструкции, условий эксплуатации и срока службы двигателя. Таким образом, приводной двигатель больше не может создавать продольную силу, поэтому вводится коэффициент отказа двигателя.
Таким образом, при комплексном рассмотрении вышеуказанных факторов дополнительная продольная сила колес должна удовлетворять ограничениям.
Таким образом, оптимальное распределение дополнительного момента рыскания можно выразить следующим образом:
5. Тестовая проверка
Учитывая практические трудности, связанные с разработкой контроллера, т.е. длительный цикл разработки и высокую стоимость, мы построили тестовую платформу для электромобиль с двумя двигателями, основанный на системе полуфизического моделирования A&D5435 и технологии быстрого прототипирования. Испытания были проведены в условиях как двухполосной, так и однополосной смены соответственно, чтобы проверить выполнимость и точность предложенной стратегии контроля устойчивости.
5.1. Платформа для испытаний электромобилей с двумя двигателями на основе системы полуфизического моделирования A&D5435
В этом исследовании была построена платформа для испытаний электромобилей с двумя двигателями на основе оборудования A&D5435 в системе моделирования контура и испытательного транспортного средства с двумя двигателями. . Система контроля устойчивости, предложенная в этой статье, была протестирована и проверена с использованием этой платформы, в которой A&D5435 заменяет блок управления транспортным средством. Входные сигналы контроллера включают: угол, угловую скорость и крутящий момент рулевого колеса, открытие педали акселератора, открытие педали тормоза, скорость автомобиля, скорость вращения колеса, крутящий момент двигателя и мощность двигателя. Выходные сигналы включают следующее: крутящий момент двигателя и тормозной момент двигателя и гидравлической тормозной системы. Упомянутый выше входной сигнал можно получить, используя следующие датчики. Угол, угловая скорость и крутящий момент рулевого колеса могут быть получены с помощью датчика крутящего момента и угла поворота рулевого колеса производства SensorWay, который установлен на рулевой колонке. Бесконтактный датчик Холла используется для записи скорости четырех колес. Датчик педали акселератора Passat B5, который имеет два канала, используется для измерения открытия педали акселератора. Точно так же открытие педали тормоза измеряется датчиком педали тормоза. Продольное ускорение, поперечное ускорение и скорость рыскания транспортного средства определяются трехосевым гироскопом. Скорость двигателя, крутящий момент и мощность получаются из сигнала CAN контроллера двигателя. Параметры автомобиля приведены в таблице 2. Испытательная платформа электромобиля с двумя двигателями показана на рисунке 7.
5.2. Тестовая проверка: дорожные испытания
Стратегия контроля устойчивости двухмоторного электромобиля, предложенная в этом документе, была проверена путем проведения дорожных испытаний транспортного средства, включающих смену двух и одной полосы движения соответственно. В то же время, чтобы продемонстрировать эффект предложенной стратегии управления, в качестве сравнительного регулятора выбрано управление в режиме скольжения (SMC) с эталонной моделью транспортного средства с учетом намерения водителя.
Дорожные испытания транспортного средства проводились на площадке для испытаний на устойчивость на комплексном полигоне испытаний транспортных средств Чанъаньского университета, как показано на рис. 8.
5.2.1. Условия двухполосной смены
Испытание проводилось в соответствии со стандартом ISO 3888-1, в котором указаны стандартные условия двухполосной смены [43]. Целевой путь движения показан на рисунке 9. Коэффициент сцепления испытательной дороги составил 0,6.
Во-первых, от водителя требовалось держать автомобиль параллельно дороге и держать руль вперед. Впоследствии водитель управлял транспортным средством так, чтобы оно быстро двигалось вперед, так что скорость транспортного средства перед выходом на намеченный путь достигала 70 км/ч, в течение этого времени рулевое колесо нельзя было использовать. Затем водитель мог свободно двигаться, преодолевая конусную дорожку.
Результат идентификации намерения водителя повернуть показан на рисунке 10. Скорость рыскания, угол бокового скольжения, поперечное ускорение и траектория движения автомобиля показаны на рисунках 11–14. Сравнение с контрольным экспериментом представлено в таблице 3.
На рисунке 11 показано, что максимальная скорость рыскания без управления составляет -35,517°/с, тогда как эталонная скорость рыскания составляет -18,66°/с, что свидетельствует о плохой устойчивости автомобиля. На 7,3 с идентифицируется текущий начальный этап намерения резкого поворота, после чего модифицируется эталонная скорость рыскания и активируется система контроля устойчивости. Через 8,45 с модель определила, что текущее намерение — обычный поворот, поэтому эталонная скорость рыскания больше не изменялась. В результате управления системой устойчивости автомобиля максимальная скорость рыскания снизилась на 47,22 %, до 18,744°/с, максимальный угол бокового увода уменьшился на 55,26 %, до −4,39.1°, а максимальное боковое ускорение уменьшилось на 19,1%, до 4,638 м/с 2 . Хотя опасных состояний, таких как боковое скольжение и штопор без управления, не возникало, реальный угол бокового скольжения и скорость рыскания намного выше эталонных. Система стабилизации явно уменьшает угол бокового скольжения и скорость рыскания, эффективно улучшая устойчивость автомобиля. Таким образом, система контроля устойчивости автомобиля позволяет автомобилю работать гораздо более плавно. Фактическая траектория движения показана на рис. 14. Между тем, из табл. 3 видно, что как контроллер, предложенный в данной статье, так и SMC с эталонной моделью транспортного средства с учетом намерения водителя могут хорошо отслеживать цель управления, а эффект управления некоторые области лучше, чем у регулятора контрастности.
5.2.2. Условие смены одной полосы
Тест проводился путем смены одной полосы движения. Целевой путь движения показан на рисунке 15. Коэффициент сцепления испытательной дороги составил 0,4. Во-первых, от водителя требовалось держать автомобиль параллельно дороге и держать руль вперед. Впоследствии водитель управлял транспортным средством так, чтобы оно быстро двигалось вперед, так что скорость транспортного средства перед выходом на заданный путь достигала 40 км/ч, в течение этого времени рулевое колесо нельзя было использовать. Затем водителю было разрешено двигаться свободно, следуя конусообразной дорожке.
Результат идентификации намерения водителя повернуть показан на рисунке 16. Скорость рыскания, угол бокового скольжения, поперечное ускорение и траектория движения автомобиля показаны на рисунках 17–20. Сравнение с эффектом управления представлено в Таблице 4.
Рисунки 17 и 18 показывают, что транспортное средство проскальзывает и крутится через 7,5 с без контроля устойчивости. Максимальная скорость рыскания достигла −62,779°/с, а максимальный угол бокового скольжения — 70,740°, что намного больше, чем у эталонной модели. Таким образом, активировалась система контроля устойчивости автомобиля. Кроме того, модель определила, что текущим намерением было обычное поворот; следовательно, эталонная скорость рыскания больше не изменялась. Система устойчивости автомобиля снизила максимальную скорость рыскания на 65,1%, а максимальный угол бокового скольжения — на 9°.2,7%. Таким образом, система стабилизации эффективно улучшила устойчивость автомобиля. Система контроля устойчивости автомобиля позволяет автомобилю двигаться гораздо более плавно, предотвращая такие опасные ситуации, как боковое скольжение и пробуксовку. Фактическая траектория движения показана на рисунке 20. Между тем, из таблицы 4 видно, что как контроллер, предложенный в этой статье, так и SMC с эталонной моделью транспортного средства с учетом намерения водителя могут хорошо отслеживать цель управления, а эффект управления некоторые области лучше, чем у регулятора контрастности.
6. Заключение
В этой статье предлагается стратегия контроля устойчивости транспортного средства с учетом намерения водителя поворачивать для двухмоторного электромобиля. (1) Верхний контроллер иерархической системы контроля устойчивости транспортного средства был построен с использованием модифицированной эталонной модели в качестве контрольная цель. Эта модель модифицирована с использованием коэффициента срочности поворота, который рассчитывается на основе результатов распознавания гибридной модели намерения поворота GHMM/GGAP-RBF. Контроллер нижнего уровня принимает минимальную сумму квадрата скорости рабочей нагрузки каждой шины в качестве цели оптимизации и принимает условия сцепления двигателя и дороги в качестве ограничений для оптимизации распределения дополнительного крутящего момента рыскания. Результаты показывают, что предлагаемая стратегия контроля устойчивости транспортного средства может работать удовлетворительно и эффективно улучшать устойчивость транспортного средства. (2) Дальнейшие исследования могут, помимо намерения поворота, также учитывать намерение водителя ускориться, намерение торможения и комплексное намерение, чтобы улучшить управляемость. стратегия контроля стабильности, X Электронная система управления и усовершенствованная система помощи при вождении. Ожидается, что это повысит безопасность и комфорт эксплуатации автомобиля.
Nomenclature
| GHMM: | Gaussian hidden Markov model |
| GGAP-RBF: | Generalized growing and pruning radial basis function |
| ABS: | Antilock braking system |
| TCS: | Система контроля тяги |
| ECB: | Electric control braking |
| EBD: | Electric brake force distribution |
| AFS: | Active front steering |
| : | Vehicle mass |
| : | Скорость рыскания |
| : | Расстояние от центра масс до передней и задней осей |
| : | Момент инерции транспортного средства вокруг0014 z -axis |
| : | Road adhesion coefficient |
| : | Lateral acceleration |
| : | Required longitudinal acceleration |
| : | Ideal yaw rate |
| : | Базовая скорость рыскания |
| : | Идеальный угол бокового скольжения |
| : | Базовый угол бокового скольжения |
| : | Cornering stiffness of the front and rear axle |
| : | Vehicle longitudinal and lateral speeds |
| : | Front wheel angle |
| : | Transmission ratio of power train |
| : | Идеальный угол поворота переднего колеса |
| : | Идеальный угол поворота колеса |
| : | Радиус поворота |
| : | Steering system angle ratio |
| : | Steering power-assisted factor |
| : | Static axle load |
| : | Sum of pneumatic trail and king pin |
| : | Stability коэффициент |
| : | Дополнительный момент |
| : | Изменение продольной силы на шину |
| : | 0193 |
| : | Longitudinal tire force |
| : | Lateral tire force |
| : | Tire load |
| : | Motor peak torque at different speeds |
| : | Motor пиковый крутящий момент |
| : | Максимальное тормозное усилие каждого колеса |
| : | Максимальная мощность двигателя |
| : | |
| : | Максимальная скорость двигателя |
| : | КПД двигателя. |
Доступность данных
Данные, использованные для поддержки результатов этого исследования, можно получить у соответствующего автора по запросу.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Благодарности
Это исследование финансировалось Национальной ключевой программой исследований и разработок Китая (№ 2018YFB1600700), Китайским фондом постдокторских наук (№ 2018T111006 и 2017M613034) и Проектом цепочки промышленных инноваций провинции Шэньси (№ 2018ZDCXL-GY-05- 03-01).
Ссылки
Национальная администрация безопасности дорожного движения, Оценка жизней, спасенных электронным контролем устойчивости, 2011–2015 , Национальная администрация безопасности дорожного движения, Вашингтон, округ Колумбия, США, 2017 г. Ю. и Чжан Л., «Обзор интегрированного управления шасси», Automotive Engineering , vol. 29, нет. 5, pp. 420–425, 2007.
Посмотреть по адресу:
Google Scholar
В.
 Чен, К. Ван и Х. Сяо, Динамика автомобильных систем и комплексное управление , Beijing Science Press, Пекин, Китай, 2014.
Чен, К. Ван и Х. Сяо, Динамика автомобильных систем и комплексное управление , Beijing Science Press, Пекин, Китай, 2014.Х. Чжан и Дж. Ван, «Управление поперечной динамикой автомобиля с помощью AFS/DYC и надежный подход к планированию усиления», IEEE Сделки по автомобильной технике , том. 65, нет. 1, стр. 489–494, 2016 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
C. Wang, C. Song и J. Li, «Улучшение активного управления моментом рыскания на основе испытательной платформы ESC для электромобиля», в Proceedings of the Fifth International Conference on Instrumentation and Measurement, Computer, Communication and Control , pp. 55–58, IEEE, Нью-Йорк, США, май 2016 г. Дж. Чжао, Дж. Хуанг, Б. Чжу и др., «Нелинейный контроль плоскостной устойчивости шасси транспортного средства на основе нечеткой модели T-S», в материалах Proceedings of the SAE 2016 World Congress and Exhibition , Уоррендейл, Пенсильвания, США, апрель.
2016.Просмотр:
Google Scholar
Дж. Сяо и Т. Чжао, «Обзор и перспективы нечеткого управления TS», Journal of Southwest Jiaotong University , vol. 51, нет. 3, pp. 462–474, 2016.
Просмотр по адресу:
Google Scholar
Чжао В., Цинь С. и Ван К. проводная система», IEEE/ASME Transactions on Mechatronics , vol. 23, нет. 2018. Т. 6. С. 2628–2637.
Просмотр:
Сайт издателя | Google Scholar
П. Ханг, С. Чен, С. Фанг и Ф. Луо, «Надежное управление электромобилем с независимым управлением четырьмя колесами и системой электронного управления», International Journal of Automotive Технология , вып. 18, нет. 5, стр. 785–797, 2017.
Посмотреть по адресу:
Сайт издателя | Google Scholar
В.
Чжао и Х. Чжан, «Стратегия управления силой и перемещением муфты для системы рулевого управления с электрическим дифференциальным усилителем электромобиля с моторизованными колесами», IEEE Transactions on Vehicular Technology , vol. 67, нет. 9, стр. 8118–8128, 2018.Посмотреть по адресу:
Сайт издателя | Google Scholar
W. Zhao, M. Fan, C. Wang, Z. Jin, and Y. Li, «H ∞/управление устойчивостью удлинения автомобильной активной системы переднего рулевого управления», Mechanical Systems and Signal Processing , об. 115, нет. 115, стр. 621–636, 2019.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Z. Wang, Y. Wang, L. Zhang et al., «Повышение устойчивости транспортного средства посредством иерархического управления для четырехколесного электромобиля с независимым приводом», Энергии , т.
10, нет. 7, 2017.Посмотреть по адресу:
Сайт издателя | Google Scholar
H. Chen, Model Predictive Control , Beijing Science Press, Пекин, Китай, 2013.
M. Jalali, A. Khajepour, S.-k. Чен и Б. Литкоуи, «Интегрированная система контроля устойчивости и тяги для электромобилей с использованием прогнозирующего управления с помощью моделей», Control Engineering Practice , vol. 2016. Т. 54. С. 256–266.
Просмотр:
Сайт издателя | Google Scholar
O. Barbarisi, G. Palmieri, S. Scala et al., «LTV-MPC для контроля скорости рыскания и контроля бокового скольжения с динамически ограниченным дифференциальным торможением», European Journal of Control , vol. 15, нет. 3–4, стр. 468–479, 2009 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Ф.
Паоло, Х. Э. Ценг, Б. Франческо и др., «Рыскание и боковая стабилизация на основе MPC с помощью активного переднего рулевого управления и торможения», Динамика систем автомобиля , том. 46, нет. sup1, стр. 611–628, 2008 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
С. Ван, С. Чжао, К. Ю и др., «Исследование стратегии системы контроля устойчивости электромобиля с двумя двигателями», в Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS) , Саппоро, Япония, май 2019 г.
Просмотр по адресу:
Google Scholar
Z. Yu, P. Yang, and X. Lu, «Применение распределения управления в электромобиле с распределенным приводом, Журнал машиностроения , том. 50, нет. 18, стр. 99–107, 2014 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Д.
Инь, Д. Шань и Б. К. Чен, «Подход к распределению крутящего момента для электронного контроля устойчивости электромобилей с приводом от колес», в Proceedings of the International Conference on Applied System Innovation , стр. 1–4, IEEE, Осака, Япония, май 2016 г.Посмотреть по адресу:
Google Scholar
Чжай Л., Сунь Т. и Ван Дж., «Электронный контроль устойчивости, основанный на управлении двигателем и распределении тормозного момента для четырехколесного электромобиля», IEEE Transactions on Vehicular Technology , vol. 65, нет. 6, стр. 4726–4739, 2016.
Посмотреть по адресу:
Сайт издателя | Google Scholar
J. Park, H. Jeong, I. Jang и S.-H. Хванг, «Алгоритм распределения крутящего момента для независимого электромобиля с использованием метода нечеткого управления», Энергии , т.
8, нет. 8, стр. 8537–8561, 2015.Посмотреть по адресу:
Сайт издателя | Google Scholar
Д. Ким и Х. Ким, «Контроль устойчивости транспортного средства с рекуперативным торможением и электронным распределением тормозного усилия для полноприводного гибридного электромобиля», Труды Института инженеров-механиков, часть D: журнал Автомобилестроения , вып. 220, нет. 6, стр. 683–693, 2006.
Посмотреть по адресу:
Сайт издателя | Академия Google
Q. Wang, L. Sun, X. Tang et al., «Исследование определения намерения торможения для HEV», Automotive Engineering , vol. 9, pp. 769–831, 2013.
Просмотр по адресу:
Google Scholar
Ма Г., Лю З., Пей X. и др., на машинах с нечеткими опорными векторами», Automotive Engineering , vol.
36, нет. 3, стр. 316–320, 2014.Посмотреть по адресу:
Google Scholar
В. Чжао, Разработка и испытание стратегий распознавания намерений и управления распределением тормозной силы для тягача-полуприцепа , Университет Цзилинь, Чанчунь, Китай, 2013 г.
Л. Сюн, Г. П. WX Zhang и Y. Feng, «Новая стратегия контроля устойчивости для электромобиля с распределенным приводом, основанная на намерениях водителя», International Journal of Automotive Technology , vol. 17, нет. 2016. Т. 4. С. 651–663.
Посмотреть по адресу:
Сайт издателя | Google Scholar
С. Ван, К. Ю и С. Чжао, «Исследование гибридной модели распознавания намерений водителя с помощью нейронной сети GHMM и GGAP-RBF», Advances in Machine Engineering , vol. 10, нет. 3, стр. 1–16, 2018 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Х.
Берндт, Дж. Эммерт, К. Дитематер и др., «Непрерывное распознавание намерений водителей со скрытыми марковскими моделями», в Proceedings of the 11th International IEEE Conference on Intelligent Transportation Systems , Пекин, Китай, октябрь 2008 г. Гибридная модель , Чунцинский университет, Чунцин, Китай, 2011 г.Л. Хе, Б. Ма и С. Зонг, «Управление аварийным рулевым управлением на основе распознавания намерения водителя управлять автомобилем с электронным управлением», Журнал Хунаньского университета (естественные науки) , том. 1, стр. 81–86, 2014.
Просмотр по адресу:
Google Scholar
Р. Понгсаторн, М. Такуя и Н. Масао, «Система управления прямым моментом рыскания на основе распознавания поведения водителя», Динамика систем автомобиля , том. 46, стр. 911–921, 2008.
Посмотреть по адресу:
Google Scholar
Г.
-Б. Хуанг, П. Саратчандран и Н. Сундарараджан, «Эффективный алгоритм последовательного обучения для наращивания и обрезки сетей RBF (GAP-RBF)», IEEE Transactions on Systems, Man and Cybernetics, Part B (Cybernetics) , vol. 34, нет. 6, стр. 2284–2292, 2004.Посмотреть по адресу:
Сайт издателя | Google Scholar
Y. Lu Yingwei, N. Sundararajan и P. Saratchandran, «Оценка производительности последовательного алгоритма обучения нейронной сети с минимальной радиальной базисной функцией (RBF)», IEEE Transactions on Neural Networks , vol. 9, нет. 2, стр. 308–318, 1998.
Посмотреть по адресу:
Сайт издателя | Академия Google
Г. Б. Хуанг, П. Саратчандран и Н. Сундарараджан, «Обобщенный рост и обрезка нейронной сети RBF (GGAP-RBF) для аппроксимации функций», IEEE Transactions on Neural Networks , vol.
16, нет. 16, стр. 57–67, 2005 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
В. Кадиркаманатан и М. Ниранджан, «Подход к оценке функций для последовательного обучения с помощью нейронных сетей», Neural Computation , vol. 5, нет. 6, стр. 954–975, 1993.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Z. Yu, Automobile Theory , China Machine Press, Пекин, Китай, 5-е издание, 2010 г.
Y. Chen and Q. Yu, Automotive Dynamics , Tsinghua University Press, Beijing , Китай, 4-е издание, 2009 г.
Ф. Хуанг, Алгоритм ускорения и торможения и моделирование процесса преобразования управления положением и давлением электрогидравлической сервосистемы , Уханьский университет науки и технологий, Ухань, Китай, 2011.
Д.
К. Мейн, Дж. Б. Роулингс, К. В. Рао и П. О. М. Скарт, «Управление с прогнозированием моделей с ограничениями: стабильность и оптимальность», Automatica , vol. 36, нет. 6, стр. 789–814, 2000.Посмотреть по адресу:
Сайт издателя | Google Scholar
Л. Лю, Нелинейный анализ и оценка стратегии управления стабильностью плоскостного движения автомобиля с тремя степенями свободы , Университет Цзилинь, Чанчунь, Китай, 2010.
С. Ван, Исследование системы контроля устойчивости транспортного средства для двухмоторного электромобиля , Университет Чанъань, Сиань, Китай, 2018 г.
К. Джин и З. Чжун, « Анализ характеристик электрического торможения и стратегии управления электромобилем», Shang Hai Automobile , №. 2, pp. 32–34, 2003.
Посмотреть по адресу:
Google Scholar
ISO 3888-2:2011, Пассажирские автомобили — испытательный трек для жесткого маневра при смене полосы движения — часть 9: предотвращение препятствий0015 , Международная организация по стандартизации, Женева, Швейцария, 2011 г.
Авторское право
Авторское право © 2020 Shu Wang et al. Это статья с открытым доступом, распространяемая в соответствии с лицензией Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии надлежащего цитирования оригинальной работы.
Определение функции устойчивости автомобиля | Law Insider
означает любое внеклассное мероприятие или мероприятие, спонсируемое школой.
означает совокупность свойств и характеристик продукта или услуги, которые влияют на их способность удовлетворять заявленные или подразумеваемые потребности. F.1.4 Коммуникация и агент работодателяКаждая коммуникация между работодателем и участником тендера должна быть направлена только агенту работодателя или от него. , и в форме, которую можно читать, копировать и записывать. Написание должно быть на английском языке. Работодатель не несет никакой ответственности за неполучение сообщений от или участником тендера.
Имя и контактные данные представителя работодателя указаны в данных тендера. F.1.5 Право работодателя принять или отклонить любое тендерное предложение F.1.5.1 Работодатель может принять или отклонить любое изменение, отклонение, тендерное предложение или альтернативное тендерное предложение, а также может отменить тендерный процесс и отклонить все тендерные предложения в любое время. время до заключения договора. Работодатель не принимает и не несет какой-либо ответственности перед участником тендера за такое аннулирование или отклонение, но в письменном виде обосновывает такие действия по письменному запросу. F.1.5.2 После отмены или отказа от тендера или отклонения всех подходящих тендерных предложений работодатель не может повторно выпустить тендер, охватывающий практически тот же объем работ, в течение шести месяцев, за исключением случаев, когда был представлен только один тендер. получено, и такая заявка была возвращена оференту невскрытой. F.2 Обязанности участника тендера F.2. 1 Правомочность Подавать тендерное предложение только в том случае, если участник тендера удовлетворяет критериям, указанным в данных тендера, и участник тендера или любой из его руководителей не находится под какими-либо ограничениями на ведение бизнеса с работодателем. F.2.2 Стоимость проведения тендера Согласитесь с тем, что работодатель не будет компенсировать участнику тендера любые расходы, понесенные при подготовке и представлении тендерного предложения, включая расходы на любое тестирование, необходимое для демонстрации того, что аспекты предложения удовлетворяют требованиям. F.2.3 Проверка документов Проверьте комплектность тендерных документов при получении и уведомите работодателя о любых несоответствиях или упущениях. F.2.4 Конфиденциальность и авторское право документов Считать конфиденциальными все вопросы, возникающие в связи с тендером. Использовать и копировать документы, выданные работодателем, только в целях подготовки и подачи тендерного предложения в ответ на приглашение. F.2.5 Справочные документы При необходимости получить для подачи тендерного предложения копии последних версий стандартов, спецификаций, условий контракта и других публикаций, которые не прилагаются, но включены в тендерную документацию путем ссылки. F.2.6 Подтверждение дополнений Подтвердите получение дополнений к тендерной документации, которые может издать работодатель, и, при необходимости, подайте заявку на продление срока закрытия, указанного в тендерных данных, чтобы учесть дополнения. F.2.7 Разъяснительная встреча При необходимости примите участие в разъяснительной встрече, на которой участники тендера могут ознакомиться с аспектами предлагаемых работ, услуг или поставок и задать вопросы. Детали встречи(й) указаны в тендерных данных. F.2.8. Запросить разъяснения. При необходимости запросить разъяснения тендерной документации, уведомив работодателя не менее чем за пять рабочих дней до времени закрытия, указанного в тендерных данных. F.2.9Страхование Имейте в виду, что объем страхования, который должен быть предоставлен работодателем (если таковой имеется), может не соответствовать полному страховому покрытию, требуемому в соответствии с условиями контракта, указанными в данных контракта. Участнику тендера рекомендуется обратиться за квалифицированной консультацией по вопросам страхования. F.2.10 Ценообразование тендерного предложения F.2.10.1 Включить в ставки, цены и общую сумму цен (если таковые имеются) все пошлины, налоги (кроме налога на добавленную стоимость (НДС) и других сборов, подлежащих уплате выигравшим участник тендера, такие пошлины, налоги и сборы применяются за 14 дней до времени закрытия, указанного в данных тендера F2.10.2 Показать НДС, подлежащий уплате работодателем отдельно, как дополнение к общей сумме цен, заявленных на тендереозначает ответственность за выполнение отдельного элемента работы по договору, которая осуществляется путем фактического выполнения, управления и надзора за соответствующей работой, что свидетельствует об ответственности и рисках владельца бизнеса, таких как обсуждение условий (суб)контрактов, принимая на себя финансовый риск, соизмеримый с контрактом или его субконтрактом, ответственность за получение соответствующих кредитных линий и/или займов или выполнение обязанностей в качестве партнера по совместному предприятию, как описано в соглашении о совместном предприятии.
означает деятельность, услуги или операции, прекращение которых в одном или нескольких государствах-членах может привести к перебоям в оказании услуг, необходимых для реальной экономики, или к нарушению финансовой стабильности из-за размера, доли рынка, внешняя и внутренняя взаимосвязанность, сложность или трансграничная деятельность учреждения или группы, особенно в отношении взаимозаменяемости этих видов деятельности, услуг или операций;
означает все время с момента, когда водитель начинает работать или должен быть в состоянии готовности к работе, до момента, когда он/она освобождается от работы и несет всю ответственность за выполнение работы.
означает деятельность, которая прямо или косвенно предусмотрена или разрешена конституцией, законом, местным уставом или постановлением или другим законом. Государственная функция включает в себя деятельность, осуществляемую на государственной или частной собственности присяжным сотрудником правоохранительных органов в рамках полномочий сотрудника правоохранительных органов, по указанию или поручению его или ее государственного работодателя в целях общественной безопасности.
означает основные должностные обязанности на должности, которую лицо с ограниченными возможностями занимает или желает. «Основные функции» не включают маргинальные функции должности.
означает услуги, связанные с поставкой товаров, такие как страхование, установка, обучение и первоначальное обслуживание, а также другие аналогичные обязательства победителя/выбранного участника торгов по Контракту.
означает дипломированную медсестру с соответствующей постбазовой квалификацией и 12-месячным опытом работы в клинической области, соответствующей его/ее указанной постбазовой квалификации, или не менее четырех лет постбазовой регистрации, включая три года. ‘ опыт работы в соответствующей области специалистов и кто удовлетворяет местным критериям.
означает лицо, перенесшее тяжелое и непрекращающееся психическое заболевание и успешно прошедшее стандартное обучение по оказанию услуг поддержки сверстников в рамках программы медицинской помощи или Плана по охране психического здоровья штата Айова.
означает непрерывный и комплексный процесс планирования, организации, координации и осуществления мер, которые необходимы или целесообразны для: оценка и предоставление рекомендаций одному или нескольким практикующим врачам относительно корректировки режима.
имеет значение, данное ему в МКУБ.
означает определенные профилактические услуги.
означает лицо, которое может продемонстрировать понимание принципов и измерений всех распространенных типов систем катодной защиты применительно к подземным или подводным системам металлических трубопроводов и резервуаров. Как минимум, такие лица должны иметь образование и опыт в области удельного сопротивления грунта, блуждающих токов, потенциала конструкции и грунта, а также измерений электрической изоляции компонентов заглубленных металлических трубопроводов и систем резервуаров.
В соответствии с Положением AB, действие по обслуживанию и управлению Ипотечными кредитами или любыми другими активами Траста юридическим лицом, которое соответствует определению «сервисера», изложенному в Пункте 1101 Положения AB и упоминается в требования раскрытия информации, изложенные в Пункте 1108 Регламента AB.
В целях разъяснения любое некапитализированное появление этого термина должно иметь значение, обычно понимаемое участниками рынка коммерческих ипотечных ценных бумаг.означает снятие симптомов и обезболивание, оказываемое неизлечимо больному ((отдельному)) лицу, а также эмоциональную, духовную и тяжелую утрату ((отдельному)) неизлечимо больному человеку и его семье в месте временного или постоянного проживания (( и может включать оказание услуг по охране здоровья на дому и уходу на дому за неизлечимо больным человеком.0005
означает все объекты, транспортные средства и инструменты, находящиеся в государственной или частной собственности, которые используются в общедоступных службах или для общедоступных услуг по перевозке людей или грузов.
означает процесс оценки, используемый для определения способности человека выполнять повседневную деятельность и решать вопросы, связанные со здоровьем и безопасностью.
означает документ Министерства под названием «Основные комплексные сертификаты об одобрении (воздух) Руководство пользователя» от апреля 2004 г.
с поправками.означает работника, который имеет профессиональную квалификацию и несет полную ответственность за техническое обслуживание на месте работы, и может быть обязан руководить другим обслуживающим персоналом.
означает директора Департамента управления закупками округа Ли или назначенное им лицо.
означает участие уполномоченного фармацевта и врача в управлении лекарственной терапией в соответствии с письменным протоколом врачебной практики или письменным протоколом больничной практики.
означает радиационный экран, который размещается на конце направляющей трубки или непосредственно на устройстве рентгенографического облучения для ограничения размера луча излучения, когда закрытый источник поворачивается в положение для рентгенографического облучения.
означает систему управления поверхностными водами, которая спроектирована и построена или внедрена для контроля сбросов, которые необходимы в связи с ливнями, включая методы сбора, транспортировки, хранения, поглощения, ингибирования, обработки, использования или повторного использования воды для предотвращения или уменьшить наводнения, чрезмерный дренаж, ухудшение состояния окружающей среды и загрязнение воды или иным образом повлиять на количество и качество сбросов из системы.
[Разделы 373.403(10) и 403.031(16) Федерального закона]
Система курсовой устойчивости и противобуксовочная система – они вам нужны? — Car Advice
Способность обнаруживать тот момент, который может изменить жизнь, когда ваша машина начинает скользить вбок, а затем иметь возможность контролировать и корректировать это скольжение, не паникуя и не падая назад в канаву, полную битого стекла. вещь, которую вы ожидаете, чтобы стать частью обучения водителей каждого участника дорожного движения.
Вы, наверное, заметили, что это не так, и в недалеком прошлом это слишком часто было проблемой. К счастью, автомобильные компании давно осознали, что большинство людей слишком несовершенны, неуравновешенны и не скоординированы, чтобы им можно было доверить такую ответственность, поэтому они решили разработать программное обеспечение, которое сделает это за нас.
С появлением ранних, простых и, откровенно говоря, слегка раздражающих систем контроля тяги, которые отключали мощность при малейшем намеке на пробуксовку колес, автомобили стали искусно удерживать нас на дороге. Настолько, что благодарные правительства объявили незаконной продажу новых автомобилей без систем контроля устойчивости, входящих в стандартную комплектацию.
Австралия сделала ESP (электронную программу стабилизации) обязательной для всех легковых автомобилей в 2013 году, а с 1 ноября этого года закон также будет применяться ко всем новым моделям легких коммерческих автомобилей.
Итак, что такое контроль устойчивости?
Контроль устойчивости — это полный набор технологий, который включает в себя контроль тяги, а также ряд комплексных программ, предназначенных для поддержания устойчивости и управляемости автомобиля независимо от дорожных условий или неуклюжести водителя.
Конечно, есть несколько предостережений по поводу контроля стабильности; хотя эти системы представляют собой инженерный подвиг, использующий больше вычислительной мощности, чем требовалось для отправки людей на Луну, они все же не могут помешать вам припарковаться на дереве, если вы решите нарушить непреложные законы физики.
Система курсовой устойчивости работает исходя из того, что всегда лучше иметь сцепление с дорогой и что автомобиль должен двигаться туда, куда хочет водитель. Они кажутся достаточно простыми параметрами, но способ работы программ контроля стабильности довольно необычен.
Все начинается с электронного блока управления (ЭБУ), а также ряда датчиков, разбросанных по всему автомобилю, которые измеряют, насколько быстро вращаются колеса, как быстро вы едете и как далеко автомобиль вращается вокруг своей центральной оси, плюс множество других переменных, которые могут включать в себя то, насколько сильно вы повернули руль и даже то, как быстро вы сбросили газ, чтобы нажать на педаль тормоза.
Если датчики указывают на неизбежную экскурсию по местности, блок управления двигателем вступает в действие, чтобы убедиться, что ваша машина остается там, где она должна быть, а не в шестичасовых новостях.
Системы контроля устойчивости срабатывают задолго до того, как вы заметите, что потеряли управление. Если, например, вы резко крутите руль, чтобы объехать препятствие, автомобиль, естественно, может ехать прямо вперед из-за недостаточной поворачиваемости.
Даже если это спасает вас только раз в год, это очень хорошее программное обеспечение
Если датчики зафиксируют, что вы рулите больше, чем движется автомобиль, система притормозит внутреннее колесо, чтобы заставить автомобиль следовать вашим командам.
Еще больше усложняет ситуацию то, что если вы затем отреагируете слишком энергично, чтобы попытаться оправиться от поворота, слишком велика вероятность перекорректировать и отправить машину в занос. Однако система контроля устойчивости готова к вашему дурачеству и снова включится, притормаживая колеса по отдельности, чтобы предотвратить выход автомобиля из-под контроля и удерживать его в правильном направлении.
Невозможно отследить, как часто системы ESP таким образом спасают людей от аварий с потерей сцепления с дорогой, но справедливо сказать, что они, вероятно, спасают кого-то где-то каждый день. И даже если это спасает вас только раз в год, это очень хорошее программное обеспечение.
Чем это отличается от обычного контроля тяги?
Контроль тяги — сравнительно простая технология по сравнению с полным набором контроля устойчивости. Он лишь предотвращает потерю сцепления с ведущими колесами в тех случаях, когда мощность двигателя превышает уровень сцепления с дорожным покрытием.
В то время как системы контроля тяги используют те же методы, что и контроль устойчивости, их возможности намного меньше. Единственные данные, которые ЭБУ системы контроля тяги собирает об автомобиле, — это скорость его движения и скорость вращения колес.
Однако, как и система стабилизации, система контроля тяги использует ряд систем для восстановления сцепления с дорогой.
Сначала датчики частоты вращения передают данные в ЭБУ. Если ECU обнаруживает, что одно колесо вращается быстрее, чем другие, он предполагает, что колесо потеряло сцепление с дорогой. Затем ECU активирует антиблокировочную тормозную систему автомобиля (ABS), чтобы аккуратно замедлить пробуксовку колеса.
Поскольку система ABS замедляет проскальзывание колеса, ЭБУ также дает команду двигателю развивать меньший крутящий момент, гарантируя, что тяга не будет преодолена при отпускании тормозов.
Как и контроль стабильности, все это может произойти менее чем за одно мгновение и часто незаметно. Чем серьезнее потеря тяги, тем заметнее будет реакция с заметным спадом при движении вперед, поскольку система все улаживает за вас.
Противобуксовочная система работает только на ведущих колесах, поэтому, если вы едете на заднеприводной машине, она будет работать только на задних колесах. В полноприводных автомобилях он может и будет тормозить и ограничивать каждое колесо.
Должен ли я когда-либо выключать противобуксовочную систему?
Если вы читаете автомобильные журналы или смотрите Top Gear, отключение трекшн-контроля — это своего рода мужское право прохода, вроде рвоты из носа, но в реальной жизни вы можете задаться вопросом, почему кнопка для этого вообще включена .
В большинстве автомобилей можно отключить только систему контроля тяги, а в некоторых случаях можно полностью отключить систему стабилизации. Отключение контроля тяги может помочь при движении по бездорожью по песку, снегу и грязи, где тормозной эффект контроля тяги фактически затруднит преодоление сложных участков.
Если вы относитесь к небольшому проценту людей, которые ездят на своих машинах на гоночную трассу, есть большая вероятность, что вы выключите трекшн-контроль в ту же минуту, когда приедете, и не будете включать его до тех пор, пока не уедете, чтобы меньше мешать. и способность сбалансировать машину на ее неровном краю для лучшего времени круга и большей легкости в стиле Кларксона.
Однако с хорошо спроектированной системой контроля тяги вы почти всегда будете быстрее, оставив ее включенной, особенно с многоступенчатыми режимами контроля тяги, распространенными среди высокопроизводительных автомобилей.
Есть очень веская причина, по которой системы контроля тяги и устойчивости запрещены в Формуле 1; водители не должны быть такими же плавными с дроссельной заслонкой, торможением или рулевым управлением, потому что компьютер может реагировать за доли секунды, чтобы обеспечить максимальное сцепление и устойчивость, лучше и быстрее, чем даже человек уровня Шумахера.