Тестер люфтов люфт детектор ГАРО ТЛ8000 00-00000158 — цена, отзывы, характеристики, фото
Тестер люфт детектор ГАРО ТЛ8000 00-00000158 производит контроль люфтов в сочленениях рулевого управления и подвески автомобилей с нагрузкой на ось до 16000 кг. Прибор эффективен, надежен и долговечен. Гальванизированное покрытие не дает испытательной платформе ржаветь. Тестер не требует фундаментных работ. Специальная кнопка на фонаре подсветки управляет перемещаемыми площадками. Прибор монтируется на смотровую канаву или подъемник и крепится за счет надежных анкерных болтов.
Дополнительные характеристики:
- Нагрузка на ось, т: 16
- Ход площадки, мм (вдоль/поперек/по диагонали): 93/123/152
- Размеры площадки, мм: 1440х1610
- Проездная высота, мм: 40
- Электропитание, В: 220
- Сжатый воздух, МПа: 0,6-0,9

- Габариты, мм 1520х1450х285
Комплектация тестера люфтов люфт детектор ГАРО ТЛ8000 *
- Устройство
- Упаковка
Параметры упакованного товара
Единица товара: Штука
Вес, кг: 320,00
Длина, мм: 1800
Ширина, мм: 1600
Высота, мм: 500
Произведено
- Китай — родина бренда
- Китай — страна производства*
Указанная информация не является публичной офертой
На данный момент для этого товара нет расходных материаловСервис от ВсеИнструменты.ру
Мы предлагаем уникальный сервис по обмену, возврату и ремонту товара!
Обратиться по обмену, возврату или сдать инструмент в ремонт вы можете в любом магазине или ПВЗ ВсеИнструменты. ру.
ру.Гарантия производителя
Гарантия производителя 6 месяцевДГ 015 Люфт детектор, нагрузка на ось 15т.
Основные параметры
Производители
АвтоТехСнаб
Код Товара:
ДГ-015
Наличие:
В наличии
Характеристики
Страна производитель:РОССИЯ
- Нагрузка на ось автомобиля: до 16000 кг
- Ход площадки: 80 мм
- Потребляемая мощность: 3 кВт
- Напряжение питания: 380 В
- Размеры платформы люфт-детектора: 700/800/250 мм
- Вес люфт-детектора без гидростанции: 520 кг
- Вес заправленной гидростанции: 140 кг
 Может устанавливаться как на подъемнике так и на смотровой канаве. Имеет синхронизацию движения площадок, что обеспечивает плавную передачу нагрузки как на левое, так и на правое колесо. Предназначен для контроля наличия зазоров в подшипниках, шарнирах и других подвижных узлах подвески автомобиля, рулевого управления, а также оценки степени их износа при проведении диагностики подвески автомобиля, а так же на линиях инструментального контроля. Технические особенности ДГ-015
• Площадки люфт-детектора имитируют все возможные нагрузки, передающиеся на рулевое управление и подвеску автомобиля в процессе его движения
• Люфт-детектор может устанавливаться как на подъемнике, так и на смотровой канаве
• Гидравлический привод
• Дистанционное управление
Может устанавливаться как на подъемнике так и на смотровой канаве. Имеет синхронизацию движения площадок, что обеспечивает плавную передачу нагрузки как на левое, так и на правое колесо. Предназначен для контроля наличия зазоров в подшипниках, шарнирах и других подвижных узлах подвески автомобиля, рулевого управления, а также оценки степени их износа при проведении диагностики подвески автомобиля, а так же на линиях инструментального контроля. Технические особенности ДГ-015
• Площадки люфт-детектора имитируют все возможные нагрузки, передающиеся на рулевое управление и подвеску автомобиля в процессе его движения
• Люфт-детектор может устанавливаться как на подъемнике, так и на смотровой канаве
• Гидравлический привод
• Дистанционное управлениег. Екатеринбург,
ул. Студенческая, дом 11, оф 307
пн-пт 09:00 до 18:00
тел.
Доставка по Екатеринбургу — бесплатно.
г. Тюмень,
ул. Московский тракт, дом 134а,
тел. +7 (345) 269-98-66
Доставка по России транспортными комапаниями КИТ, Деловые линии, ПЭК
ЛД-5 Люфт-детектор для диагностики подвески автомобиля, нагрузка 5 т. Встраивается в пол
ЛД-5 Люфт-детектор предназначен для диагностики подвески автомобиля при проведении ремонтных работ и перед регулировкой углов установки колёс. Устанавливается в приямки расположенные по краям канавы. Плоскость верхних подвижных пластин находится на уровне пола.
(По отдельному заказу изготавливается конструкция с возможностью приварки площадки люфт-детектора к платформам платформенных подъёмников).
Для оценки технического сотояния отдельных узлов подвески и рулевого управления, необходимо создать внешние воздействия на колёса автомобиля.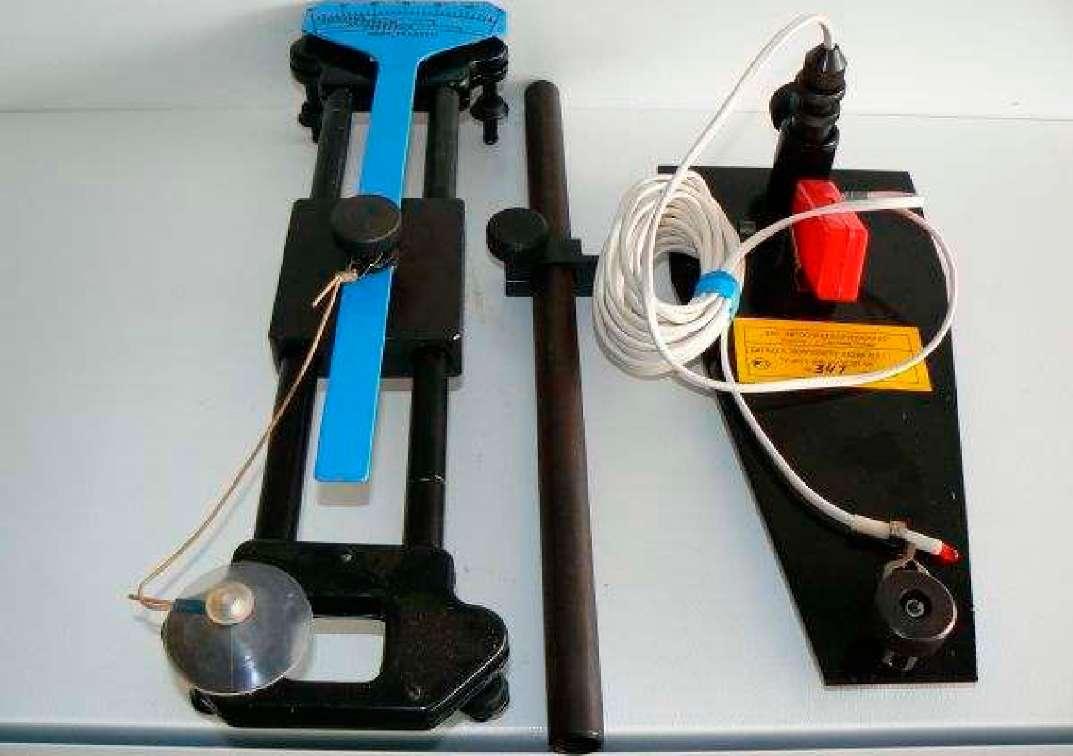 При этом сила этих воздействий должна быть больше силы которая реально воздействует на колёса автомобиля при движении, а её направление должно совпадать с направлением воздействия реальных сил.
При этом сила этих воздействий должна быть больше силы которая реально воздействует на колёса автомобиля при движении, а её направление должно совпадать с направлением воздействия реальных сил.
Достоинства люфт-детектора ЛД5:
- максимально допустимая нагрузка на люфт-детектор — 5 тонн
- диагональное перемещение площадок на расстояние 50 мм
- усилие смещения пластин — 30 кН или 3 тонны
Диагностика подвески включает в себя:
- проверку люфтов в шаровых опорах, рулевых тягах, ШРУСах
- проверку состояния сайлентблоков и других узлов ходовой части автомобиля
- проверку подшипников ступиц.
Технические характеристики:
|
Тип |
электрогидравлический |
|
Максимальная нагрузка на люфт-детектор, т |
5 |
|
Максимальная нагрузка на колесо, т |
2,5 |
|
Размер тестовой пластины, мм |
600х615 |
|
Ход площадки по диагонали, мм |
50 |
|
Усилие смещения пластин, кН |
30 (3 тонны) |
|
Мощность двигателя гидростанции, кВт |
2,2 |
|
Электропитание |
380В/50Гц |
|
Управление |
дистанционно, кнопками, вмонтированными в галогенный фонарь |
|
Габариты платформ люфт-детектора, (длина х ширина х высота), мм |
750х640х106 |
|
Масса, кг |
242 |
Способ контроля суммарного люфта в рулевом управлении транспортного средства и устройство для его реализации
Изобретение относится к способу контроля суммарного люфта в рулевом управлении транспортного средства и устройству для его реализации.

 Технический результат заключается в повышении точности и достоверности результатов. 2 н. и 1 з.п. ф-лы, 4 ил.
Технический результат заключается в повышении точности и достоверности результатов. 2 н. и 1 з.п. ф-лы, 4 ил.
Изобретение относится к технической диагностике состояния рулевого управления автотранспортных средств (АТС) и предназначено для оценки состояния рулевого управления по величине суммарного люфта в цепи рулевого управления.
Известен способ контроля люфта, который описан в способе контроля люфта в рулевом управлении транспортного средства /пат. RU №2048032, кл. G 01 М 17/06, бюл.№12, 1999/. Этот способ заключается в последовательном повороте руля в одну и другую стороны и в оценке люфта по углу поворота руля после подачи сигнала о выборке люфта, который формируется датчиком усилия руля и корректирующим блоком в виде разрешающего сигнала.
Известное устройство для контроля люфта содержит датчик угла поворота руля, блок вычисления люфта, на выходе которого установлен индикатор выбора люфта, счетчик числа измерений, дешифратор, блок вычисления люфта, пороговое устройство в виде задатчика усилия.
В способе и реализующем его устройстве точность контроля люфта руля недостаточна из-за возможных ложных показаний, связанных с состоянием смазки, загрязненностью рулевого управления, степенью его износа и величинами моментов затяжки сопрягаемых соединений контролируемой цепи. Кроме того, не предусмотрены средства, гарантирующие достоверность контроля.
За прототип заявляемому техническому решению выбран способ контроля, который описан в способе контроля люфта в рулевом управлении транспортного средства и устройство для его реализации /пат. RU и №2129712, кл. G 01 М 17/06, бюл.№12, 1999/. Известный способ заключается в последовательном повороте руля в одну и другую стороны на угол, заведомо больший люфта, содержит датчики угла поворота руля и перемещения управляемого колеса и формирует характеристику люфта по сигналам о выборке люфта, после чего люфт оценивают как суммарный угол поворота руля между указанными линейными зонами характеристики.
За прототип заявленного технического решения выбрано устройство, описанное в патенте №2129712. Известное устройство содержит датчик угла поворота руля, датчик угла поворота колеса, пороговое устройство, блок вычисления люфта, на выходе которого установлен индикатор люфта. В устройстве увеличения точности и достоверности контроля добиваются введением в устройство согласующих усилителей, блока регистров, блока указания направления поворота руля, порогового устройства, выполненного в виде компаратора, ко входу которого подключен задатчик уровня, при этом согласующие усилители установлены соответственно на выходах датчика угла поворота руля и датчика угла поворота колеса, первые выходы согласующих усилителей подключены к первому и второму входам блока регистров, второй выход согласующего усилителя датчика угла поворота руля подключен к третьему входу блока регистров, а второй выход согласующего усилителя датчика угла поворота колеса подключен к четвертому входу блока регистров через компаратор порогового устройства, при этом блок указания направления поворота подключен ко входу задатчика уровня порогового устройства, а второй выход блока регистров подключен ко входам блока вычисления люфта.
Известное устройство содержит датчик угла поворота руля, датчик угла поворота колеса, пороговое устройство, блок вычисления люфта, на выходе которого установлен индикатор люфта. В устройстве увеличения точности и достоверности контроля добиваются введением в устройство согласующих усилителей, блока регистров, блока указания направления поворота руля, порогового устройства, выполненного в виде компаратора, ко входу которого подключен задатчик уровня, при этом согласующие усилители установлены соответственно на выходах датчика угла поворота руля и датчика угла поворота колеса, первые выходы согласующих усилителей подключены к первому и второму входам блока регистров, второй выход согласующего усилителя датчика угла поворота руля подключен к третьему входу блока регистров, а второй выход согласующего усилителя датчика угла поворота колеса подключен к четвертому входу блока регистров через компаратор порогового устройства, при этом блок указания направления поворота подключен ко входу задатчика уровня порогового устройства, а второй выход блока регистров подключен ко входам блока вычисления люфта.
Однако в способе и устройстве прототипах точность контроля люфта недостаточна из-за влияния передаточного числа рулевого механизма на результат измерения и погрешности, вносимой влиянием величины угла поворота управляемого колеса на результат измерения.
Задачей создания изобретения является разработка способа и устройства для его реализации, позволяющих увеличить точность и достоверность результатов контроля за счет исключения влияния передаточного числа рулевого механизма и величины угла поворота управляемого колеса на измеряемый суммарный люфт рулевого управления транспортного средства.
Поставленная задача решается с помощью признаков, указанных в 1-м пункте формулы изобретения, общих с прототипом, таких как способ контроля суммарного люфта в рулевом управлении транспортного средства, заключающийся в последовательном повороте руля в одну и другую стороны на угол, заведомо больший люфта, с последующей регистрацией датчиками угла поворота руля и величины перемещения управляемого колеса и формировании характеристики люфта, после чего оценивают люфт по углу поворота руля после выборки, и отличительных существенных признаков, таких как: датчик измерения угла поворота руля устанавливают произвольно на ободе руля в плоскости его вращения, при этом перемещение управляемого колеса определяют по перемещению крайней от центра обода управляемого колеса точки в горизонтальной плоскости, принимая ее за начало отсчета люфта руля, а за окончание отсчета угла принимают перемещение этой точки в противоположную сторону на двойную величину, причем суммарный люфт рулевого управления определяют как разность угла поворота руля с начала отсчета до первого начала перемещения обода управляемого колеса за вычетом угла поворота рулевого колеса от первого до второго начала перемещения обода управляемого колеса в ту же сторону.
Особенность размещения датчика измерения угла порота руля отражена в пункте 2 формулы изобретения, а именно датчик измерения угла поворота руля фиксируют в трех точках, в произвольном месте, на ободе руля в плоскости его вращения.
Поставленная задача решается с помощью признаков, указанных в пункте 3 формулы изобретения, общих с прототипом, таких как устройство для контроля суммарного люфта в рулевом управлении транспортного средства, содержащее датчики угла поворота руля и перемещения управляемого колеса, блок вычисления люфта, на выходе которого установлен индикатор люфта, подключенные к блоку питания, и отличительных существенных признаков, таких как: блок вычисления люфта содержит последовательно подключенные аналого-цифровой преобразователь и микроконтроллер, причем выход датчика угла поворота рулевого колеса, выполненного виде гироскопа, подключен к входу аналого-цифрового преобразователя, выход которого подключен к первому входу микроконтроллера, на первый выход которого подключен индикатор люфта, а на второй выход дополнительный индикатор — пьезоизлучатель, второй вход микроконтроллера подключен к выходу датчика перемещения управляемого колеса, причем каждый элемент схемы по общей шине подключен к блоку питания, при этом устройство дополнительно снабжено коммутатором, вход которого подключен к третьему выходу микроконтроллера, а выходы подключены к драйверам интерфейса RS-232 и USB.
Вышеперечисленные признаки позволяют получить следующий технический результат: увеличение точности и достоверности результатов контроля путем исключения влияния передаточного числа рулевого механизма и величины угла поворота управляемого колеса на измеряемый суммарный люфт рулевого управления транспортного средства.
Указанные выше отличительные признаки, каждый в отдельности и все совместно, направлены на решение поставленной задачи и являются существенными. Использование предлагаемого сочетания существенных отличительных признаков в известном уровне техники не обнаружено, следовательно, предлагаемое техническое решение (способ и устройство) соответствует критерию патентоспособности «новизна».
Единая совокупность новых существенных признаков с общими, известными обеспечивает решение поставленной задачи, является неочевидной для специалистов в данной области техники и свидетельствует о соответствии заявленного технического решения критерию патентоспособности «изобретательский уровень».
Предложенный способ контроля люфта в рулевом управлении транспортного средства и устройство для его реализации поясняются следующими чертежами и схемами.
На фиг.1 приведена блок-схема устройства.
На фиг.2 приведена схема перемещения управляемых колес.
На фиг.3 приведена характеристика люфта руля как зависимость угла поворота руля от перемещения управляемого колеса при различных передаточных числах рулевого механизма, но одном и том же суммарном люфте рулевого управления.
На фиг.4 приведена характеристика люфта руля как зависимость угла поворота руля от перемещения управляемого колеса при различных значениях величины перемещения управляемого колеса, но одном и том же суммарном люфте рулевого управления.
Устройство для реализации предложенного способа (см. фиг.1) содержит датчик 1 угла поворота руля и датчик 2 перемещения обода управляемого колеса, блок вычисления люфта (включает преобразователь 3, микроконтроллер 4), на выходе которого установлен жидкокристаллический индикатор 5 люфта, блок питания 6.
Устройство снабжено последовательно подключенными аналого-цифровым преобразователем 3 и микроконтроллером 4, причем выход датчика 1 угла поворота рулевого колеса, выполненного в виде гироскопа, подключен к входу аналого-цифрового преобразователя 3, выход которого подключен к первому входу микроконтроллера 4, на первый выход которого подключен индикатор люфта 5, а на второй выход дополнительный индикатор — пьезоизлучатель 7, второй вход микроконтроллера 4 подключен к выходу датчика 2 перемещения обода управляемого колеса, при этом устройство дополнительно снабжено коммутатором 8, выходы которого подключены к драйверам интерфейса RS-232 9 и USB 10, причем каждый элемент схемы по общей шине подключен к блоку питания 6.
Пример реализации способа
Предложенный способ контроля суммарного люфта в рулевом управлении транспортного средства предусматривает последовательный поворот руля в одну и другую стороны на угол, заведомо больший люфта, с последующей регистрацией датчиками угла поворота руля и величины перемещения управляемого колеса, и формированием характеристики люфта, после чего оценивают люфт по углу поворота руля после выборки люфта.
Датчик измерения угла поворота руля устанавливают произвольно на ободе руля в плоскости его вращения, при этом начало перемещения управляемого колеса определяют по началу перемещения крайней от центра обода управляемого колеса точки в горизонтальной плоскости, принимая ее за начало отсчета люфта руля, а за окончание отсчета угла принимают начало перемещения этой точки в противоположную сторону на двойную величину, причем суммарный люфт рулевого управления определяется как разность угла поворота руля с начала отсчета до первого начала перемещения обода управляемого колеса за вычетом угла поворота рулевого колеса от первого до второго начала перемещения обода управляемого колеса в ту же сторону.
Для того чтобы исключить влияние передаточного числа рулевого механизма, точность настройки датчика перемещения управляемого колеса и нелинейность деформации резины колеса, измерение суммарного люфта необходимо осуществлять предложенным способом (см. фиг.2, 3, 4).
Известно, что угол поворота управляемого колеса меньше угла поворота рулевого колеса на передаточное число рулевого механизма, которое у разных АТС разное, и, кроме того, перемещение обода управляемого колеса необходимо осуществлять таким образом, чтобы колесо не перемещалось относительно дорожного покрытия, на котором оно установлено. Для исключения влияния нелинейности деформации резины перемещения управляемого колеса определяют по перемещению крайней от центра обода управляемого колеса точки в горизонтальной плоскости, то есть по ободу колеса, а не по перемещению резины колеса.
Для исключения влияния нелинейности деформации резины перемещения управляемого колеса определяют по перемещению крайней от центра обода управляемого колеса точки в горизонтальной плоскости, то есть по ободу колеса, а не по перемещению резины колеса.
На фиг.2 показано направление перемещения управляемого колеса — сначала ОА, потом АБ, а затем БС — для исключения его отрыва от дорожного покрытия.
На фиг.3 показана пунктирной линией зависимость: изменение угла поворота рулевого колеса (λ) от перемещения управляемого колеса (U), при одном значении передаточного числа рулевого механизма, а сплошной линией зависимость: изменение угла поворота рулевого колеса (λ) от перемещения управляемого колеса (U), при другом (большем) значении передаточного числа рулевого механизма при одинаковой величина суммарного люфта рулевого управления транспортного средства. Причем считаем, что погрешность измерения перемещения (напряжения) управляемого колеса ЕН и ЕК, измеряемая датчиком перемещения управляемого колеса, в обоих случаях одинаковая и равна 0,15 мм, то есть при перемещении штока датчика перемещений управляемого колеса в одну и другую стороны на 0,15 мм напряжение на его выходе будет одной величины (ОД).
ОА и ОБ — изменение угла поворота руля в одну сторону, а ЕН и ЕК — изменение перемещения (U) управляемого колеса при разных передаточных числах рулевого механизма. АИ и БХ — изменение угла поворота руля в другую сторону, а ЕНГФ и ЕКВШ — изменение угла поворота (U) управляемого колеса при разных передаточных числах рулевого механизма. Причем вращение рулевого колеса в другую сторону осуществляем до изменения перемещения управляемого колеса на двойную величину (ГЦ, ЦФ и ЖЮ, ЮШ).
После этого вычитаем из полученной величины угла (ЛР) после первого начала перемещения управляемого колеса приращение угла РС, полученное после второго измерения, и получим ЛВ, то есть истинное значение суммарного люфта руля. Аналогично для другого передаточного числа рулевого механизма:
МП-ПТ=МД
Полученные результаты ЛВ и МД равны, то есть, осуществляя измерения изложенным способом, мы исключаем влияние передаточного числа рулевого механизма на результат измерения суммарного люфта в рулевом управлении.
На фиг.4 пунктирной линией показана зависимость: изменение угла поворота рулевого колеса (λ) от перемещения управляемого колеса (U), при одном его значении, а сплошной линией — эта же зависимость при другом (большем) значении величины перемещения управляемого колеса, то есть при разных чувствительностях датчика перемещений колеса, но при одинаковых передаточных числах рулевого механизма и суммарном люфте.
ОА и ОБ — изменение угла (λ) поворота руля в одну сторону, а ЕН и ЕК — изменение (например, напряжения) перемещения (U) управляемого колеса при разных чувствительностях датчика перемещения управляемого колеса.
АИ и БХ — изменение угла (λ) поворота руля в другую сторону, а НГФ и КЖШ — изменение перемещения (U) управляемого колеса при разных чувствительностях датчика перемещения управляемою колеса. Причем вращение рулевого колеса в другую сторону осуществляем до тех пор, пока измеряемая величина перемещения управляемого колеса, измеряемая каким-то чувствительным элементом, не будет измерена дважды (ГЦ, ЦФ и ЖЮ, ЮШ).
После этого вычитаем из полученной величины угла поворота руля после первого измерения ЛР приращение угла РС, полученное после второго измерения, и получим ЛВ, то есть истинное значение суммарного люфта руля ЛВ. Аналогично для другой чувствительности датчика перемещения управляемого колеса получим:
МП-ПТ=МД
Полученные результаты ЛВ и МД, как видно из графика, равны, то есть, осуществляя измерения изложенным способом, мы исключаем влияние разброса чувствительности датчика перемещений (у разных датчиков измерения перемещения управляемого колеса существует разброс от 0,1 мм до 0,18 мм) управляемого колеса на результат измерения суммарного люфта в рулевом управлении.
Следовательно, для получения точного значения суммарного люфта рулевого управления АТС необходимо его измерения осуществлять описанным выше способом.
Способ реализован в приборе, названном авторами «ВИРАЖ», для проверки рулевого управления легковых и грузовых автомобилей. Датчик угла поворота руля 1 устанавливался на ободе руля в плоскости его вращения в удобном месте, а датчик перемещения управляемого колеса 2 устанавливался к ободу управляемого колеса в крайней от его центра точке в горизонтальной плоскости. После чего произведен последовательно поворот руля влево до перемещения обода колеса, а затем вправо на двойную величину перемещения обода колеса. Сформирована характеристика люфта как разность угла поворота руля с начала отсчета до первого перемещения обода управляемого колеса за вычетом угла поворота рулевого колеса от первого до второго перемещения обода управляемого колеса в ту же сторону. После чего был определен суммарный люфт рулевого управления.
После чего произведен последовательно поворот руля влево до перемещения обода колеса, а затем вправо на двойную величину перемещения обода колеса. Сформирована характеристика люфта как разность угла поворота руля с начала отсчета до первого перемещения обода управляемого колеса за вычетом угла поворота рулевого колеса от первого до второго перемещения обода управляемого колеса в ту же сторону. После чего был определен суммарный люфт рулевого управления.
Установлено, что на автомобиле ВАЗ-2105 с передаточным числом рулевого механизма 16,4 и при работающем двигателе в процессе контроля при перемещении обода управляемого колеса влево на 0,15 мм и после этого вправо дважды но 0,15 мм колесо не отрывается от дорожного покрытия, а суммарный люфт равен 1,84 градуса, что соответствует суммарному углу поворота руля на характеристике люфта.
На грузовом автомобиле ЗИЛ-157КД с передаточным числом рулевого механизма 23,5 и при работающем двигателе в процессе контроля при перемещении обода управляемого колеса влево на 0,15 мм и после этого вправо дважды по 0,15 мм колесо не отрывается от дорожного покрытия, а суммарный люфт равен 14,04 градуса.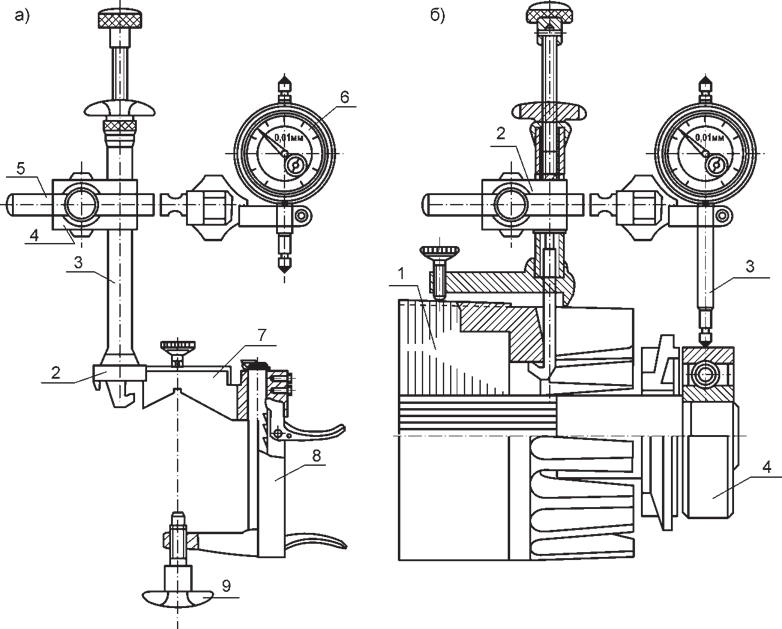
Устройство для реализации способа работает следующим образом. При повороте руля влево от положения «езда прямо» в кинематической цепи рулевого управления выбирается сначала люфт (см. участок ОЕ на фиг.3 и фиг.4). Отсутствие в рулевом управлении идеальных зазоров из-за наличия смазки, загрязнения, наличия контактов деталей по необработанным поверхностям и моментов затяжки сопрягаемых соединений приводит к незначительному сдвигу управляемого колеса в начале контроля. При дальнейшем повороте руля в ту же сторону крутизна наклона характеристики перемещения управляемого колеса увеличивается (см. участок ЕН и ЕК на фиг.3 и 4), причем, чем больше передаточное число рулевого механизма, тем меньше крутизна (крутизна участка ЕК меньше ЕН на характеристике). Это свидетельствует о выборке люфтов в сопрягаемых соединениях и начале перемещения обода управляемого колеса, то есть происходит изменение сигнала (напряжения) на датчике 2 перемещения колеса. Это напряжение поступает на второй вход микроконтроллера 4. На первый вход микроконтроллера поступает оцифрованный аналого-цифровым преобразователем 3 сигнал с датчика 1 угла поворота руля.
При перемещении обода колеса на 0,15 мм напряжение на втором входе микроконтроллера достигнет величины 20 мВ. При этом микроконтроллер 4 выработает команды: первая запомнит новое угловое положение по первому входу датчика 1 руля и примет его за начало отсчета; вторая по входу (2) датчика 2 перемещения колеса запомнит его новое значение напряжения; третья по выходу 1 изменит надпись на индикаторе «Повернуть вправо»; четвертая по выходу 2 выработает кратковременный сигнал и пьезоизлучатель 7 подаст звуковой сигнал. Теперь вращаем руль вправо до тех пор, пока не начнет перемещаться обод управляемого колеса вправо, то есть напряжение на втором входе микроконтроллера 4 не изменится, например, на 20 мВ, что пропорционально перемещению крайней точки обода управляемого колеса на величину, например, 0,15 мм. При этом микроконтроллер 4 выработает команды: первая запомнит по первому входу датчика 1 руля угол λ1, на который повернули руль вправо; вторая по входу 2 датчика 2 перемещения колеса запомнит его новое значение напряжения; третья по выходу 1 изменит надпись на индикаторе «Угол руля». Продолжаем вращать руль в том же направлении (вправо) до тех пор, пока напряжение на втором входе микроконтроллера 4 не изменится, например, на 20 мВ, что пропорционально перемещению крайней точки обода управляемого колеса вправо еще на величину, например, 0,15 мм. При этом микроконтроллер 4 выработает команды: первая запомнит по первому входу датчика 1 руля угол λ2, на который повернули руль вправо от первого до второго перемещения датчика 2 колеса; вторая осуществит вычитание из первоначально запомненного угла поворота руля второе его значение, то есть λ=λ1-λ2; третья по выходу 1 изменит надпись на индикаторе, отобразив полученный суммарный угол λ рулевого управления, например, «Люфт руля 12,47°»; четвертая по выходу 2 выработает кратковременный сигнал и пьезоизлучатель 7 подаст звуковой сигнал. Таким образом произведено измерение суммарного люфта рулевого управления транспортного средства.
Продолжаем вращать руль в том же направлении (вправо) до тех пор, пока напряжение на втором входе микроконтроллера 4 не изменится, например, на 20 мВ, что пропорционально перемещению крайней точки обода управляемого колеса вправо еще на величину, например, 0,15 мм. При этом микроконтроллер 4 выработает команды: первая запомнит по первому входу датчика 1 руля угол λ2, на который повернули руль вправо от первого до второго перемещения датчика 2 колеса; вторая осуществит вычитание из первоначально запомненного угла поворота руля второе его значение, то есть λ=λ1-λ2; третья по выходу 1 изменит надпись на индикаторе, отобразив полученный суммарный угол λ рулевого управления, например, «Люфт руля 12,47°»; четвертая по выходу 2 выработает кратковременный сигнал и пьезоизлучатель 7 подаст звуковой сигнал. Таким образом произведено измерение суммарного люфта рулевого управления транспортного средства.
Вышеприведенные примеры свидетельствуют о промышленной применимости предлагаемого технического решения.
Технико-экономический эффект предложенного способа и устройства для его реализации заключается в увеличении точности контроля в 2,5 раза и производительности в 1,5 раза по сравнению с известными при одновременном повышении достоверности контроля.
1. Способ контроля суммарного люфта в рулевом управлении транспортного средства, заключающийся в последовательном повороте руля в одну и другую стороны на угол, заведомо больший люфта, с последующей регистрацией датчиками угла поворота руля и величины перемещения управляемого колеса и формировании характеристики люфта, после чего оценивают люфт по углу поворота руля после выборки, отличающийся тем, что датчик измерения угла поворота руля устанавливают произвольно на ободе руля в плоскости его вращения, при этом перемещение управляемого колеса определяют по перемещению крайней от центра обода управляемою колеса точки в горизонтальной плоскости, принимая ее за начало отсчета люфта руля, а за окончание отсчета угла принимают перемещение этой точки в противоположную сторону на двойную величину, причем суммарный люфт рулевого управления определяют как разность угла поворота руля с начала отсчета до первого начала перемещения обода управляемого колеса за вычетом угла поворота рулевого колеса от первого до второго начала перемещения обода управляемого колеса в ту же сторону.
2. Способ по п.1, отличающийся тем, что датчик измерения угла поворота руля фиксируют в трех точках в произвольном месте на ободе руля в плоскости его вращения.
3. Устройство для контроля суммарного люфта в рулевом управлении транспортного средства, содержащее датчики угла поворота руля и перемещения управляемого колеса, блок вычисления люфта, на выходе которого установлен индикатор люфта, подключенные к блоку питания, отличающееся тем, что блок вычисления люфта содержит последовательно подключенные аналого-цифровой преобразователь и микроконтроллер, причем выход датчика угла поворота рулевого колеса, выполненного в виде гироскопа, подключен к входу аналого-цифрового преобразователя, выход которого подключен к первому входу микроконтроллера, на первый выход которого подключен индикатор люфта, а на второй выход — дополнительный индикатор — пьезоизлучатель, второй вход микроконтроллера подключен к выходу датчика перемещения управляемого колеса, причем каждый элемент схемы по общей шине подключен к блоку питания, при этом устройство дополнительно снабжено коммутатором, вход которого подключен к третьему выходу микроконтроллера, а выходы подключены к драйверам интерфейса RS -232 и USB.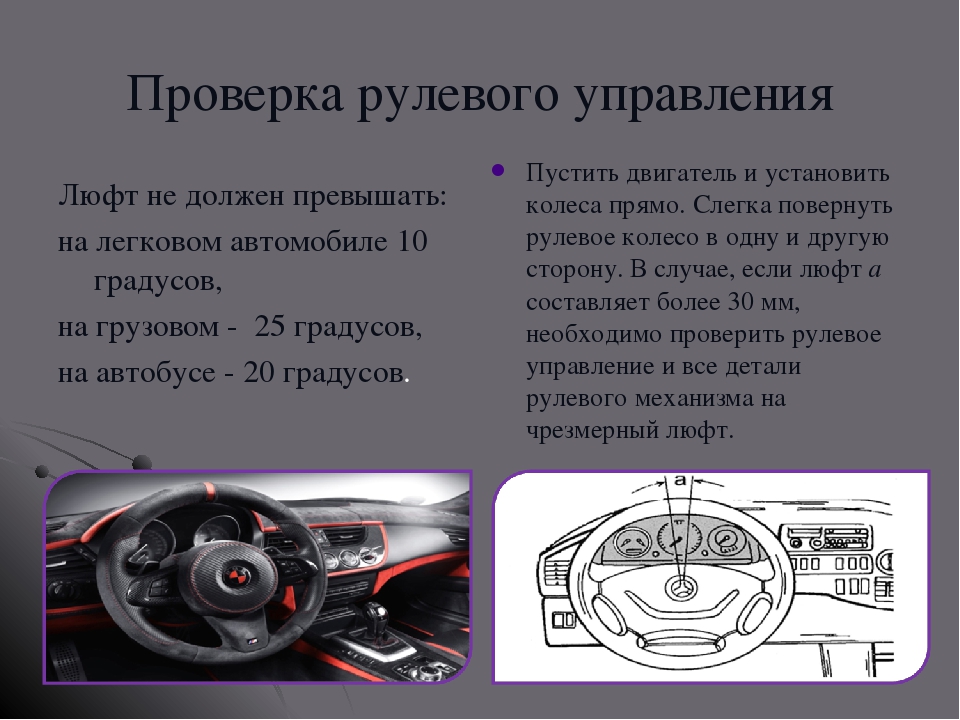
Люфтомер. Прибор для измерения люфта рулевого управления
При проведении инструментального контроля используются механические и электронные люфтомеры.
Каретка с осью поворота угломерной шкалы выставляется в центр рулевого колеса путем уравнивания вылетов (а = b) стержней 3 относительно каретки. Этим обеспечивается неподвижность указательной нити-«стрелки» при повороте рулевого колеса и правильность измерения люфта.
Динамометр устанавливается на нижнем кронштейне и закрепляется стопорным винтом в таком положении, при котором при установке люфтомера на ободе рулевого колеса приложенное к нагрузочному устройству усилие пришлось бы на середину сечения обода.
Метод измерения суммарного люфта рулевого управления, выполняемого одним оператором, заключается в выявлении угла поворота рулевого колеса по угловой шкале люфтомера между двумя фиксированными положениями, которые определяются приложением к нагрузочному устройству поочередно в обоих направлениях одинаковых усилий, регламентируемых в зависимости от собственной массы оси автомобиля, приходящейся на управляемые колеса.
Таблица. Зависимость усилия, прилагаемого к ободу рулевого колеса, от массы автомобиля, приходящейся на управляемые колеса
При повороте управляемого колеса в случае приложения регламентируемого усилия на него фиксируемые положения должны соответствовать моменту начала поворота колеса, который определяется вторым оператором визуально или с помощью дополнительных средств (например, индикатора).
Пружинный динамометр люфтометра К-524 тарируется на заводе-изготовителе по совпадению риски 11 указателя с кромкой 6 крышки при нагрузке (1,00 + 0,08) кгс, после чего указатель пломбируется красной краской.
Рис. Пружинный динамометр люфтомера К-524 (вид в разрезе): 1 — корпус; 2 — пружина; 3 — чашка пружины; 4 — контргайка; 5 — крышка; 6 — кромка крышки; 7 — головка; 8 — шпилька; 9 — указатель; 10, 11, 12 — риски регламентируемых усилий 1,25; 1,0 и 0,75 кг соответственно
Электронный люфтомер ИСЛ-401
Электронный люфтомер ИСЛ-401 предназначен для измерения суммарного люфта рулевого управления легковых и грузовых автомобилей, автобусов методом прямого измерения угла поворота рулевого колеса относительно управляемых колес. Основным отличием люфтомера ИСЛ-401 от К-524 является наличие датчика, фиксирующего начало поворота колеса, а не динамометра, измеряющего усилие поворота.
Основным отличием люфтомера ИСЛ-401 от К-524 является наличие датчика, фиксирующего начало поворота колеса, а не динамометра, измеряющего усилие поворота.
Рис. Электронный люфтомер ИСЛ-401: а — основной блок; б — датчик момента трогания колеса; 1 — кнопка включения-выключения основного блока; 2 — дисплей показаний основного блока; 3 — кнопка сброса-повтора измерений; 4 — разъем кабеля для определения момента трогания управляемого колеса; 5 — упор датчика; 6 — место прижима опорной планки при установке датчика; 7 — флажок фиксатора опорной планки; 8 — опорная планка
Суммарным люфтом в рулевом управлении считается угол поворота рулевого колеса от положения, соответствующего началу поворота управляемых колес в одну сторону от исходного положения, до положения, соответствующего началу их поворота в противоположную сторону.
Работа прибора основана на измерении суммарного люфта рулевого управления датчиком угла с отсечкой начала и конца отсчета по сигналам датчика начала поворота управляемого колеса.
В состав прибора входят два блока: основной блок и датчик момента трогания колеса.
Для измерения люфта рулевого управления транспортных средств, имеющих ось рулевой колонки, наклоненную под углом менее 30° к вертикальной оси, в комплект прибора входят тяга, присоска, которая через пружину связана со шнуром, и планка с отверстиями, позволяющая регулировать длину шнура тяги.
Процесс проверки рулевого управления с помощью люфтомера ИСЛ-401
Основной блок прибора устанавливается и фиксируется захватом за внешнюю сторону обода рулевого колеса проверяемого автотранспортного средства. Датчик момента трогания крепится на колесе так, чтобы он опирался контактным узлом на внешнюю вертикальную плоскость диска колеса, и подключается к основному блоку через разъем 4.
Прибор подключается к штатной электросистеме с помощью шнура со штекером, устанавливаемым в гнездо прикуривателя автомобиля, а при отсутствии прикуривателя — к клеммам аккумулятора автомобиля или внешнего источника постоянного тока напряжением 12…24 В. Допускается использование внешнего источника питания со стабилизированным напряжением 12 В и выходной мощностью не менее 20 Вт.
Допускается использование внешнего источника питания со стабилизированным напряжением 12 В и выходной мощностью не менее 20 Вт.
Датчик момента трогания устанавливается на управляемом колесе в следующем порядке. Удерживая корпус датчика в горизонтальном положении, следует приставить правый упор к плоскому участку поверхности диска управляемого колеса, нажать на опорную планку 8 в месте ее прижима, подвинуть левый упор 5 до касания аналогичного участка диска колеса с другой стороны относительно оси поворота колеса. При этом нижние концы опор датчика должны опираться в пол без скольжения. Далее следует подключить датчик к основному блоку через разъем 4 и расфиксировать опорную планку поворотом флажка 7 в положение «Откр.».
При замере люфта не допускается опирание упоров в покрышку колеса, так как это приводит к ошибочным результатам замеров. В местах касания упоров диск колеса должен быть чистым. Можно опирать упоры на декоративный колпак при условии, что он закреплен на диск без люфтов.
Затем следует включить прибор нажатием кнопки 1. При этом слышится звуковой сигнал, а на дисплее основного блока появляется надпись «ИСЛ-401». Прибор контролирует правильность функционирования датчика в исходном положении, и если требования удовлетворены, то на дисплее индицируется сообщение «ВРАЩАЕМ РУЛЬ ↑». Если в датчике обнаружится неисправность, то на дисплее индицируется одно из следующих сообщений: «АВАРИЯ ДАТЧИКА. ДМТ: 1-й КАНАЛ», или «АВАРИЯ ДАТЧИКА. ДМТ: 2-й КАНАЛ», или «ОБРЫВ ЦЕПИ Y1», или «ОБРЫВ ЦЕПИ Y2», указывающее на конкретную неисправность, либо: «ИЗМЕРЯТЬ НЕЛЬЗЯ! АККУМУЛЯТОР ТРЕБУЕТ ЗАРЯДКИ!», что говорит о заниженном напряжении питающего устройства.
Плавно, без рывков вращают рулевое колесо в направлении, указанном на дисплее (против хода часовой стрелки), до подачи прибором звукового сигнала, соответствующего положению «Люфт выбран».
При вращении рулевого колеса с закрепленным на нем основным блоком влево и при перемещении управляемого колеса датчик дает микропроцессору команду на начало отсчета угловой величины люфта. При этом слышится звуковой сигнал, а на дисплее изменится направление указывающей стрелки: «ВРАЩАЕМ РУЛЬ ↓».
При этом слышится звуковой сигнал, а на дисплее изменится направление указывающей стрелки: «ВРАЩАЕМ РУЛЬ ↓».
По звуковому сигналу необходимо изменить направление вращения рулевого колеса на направление, указанное на дисплее (по ходу часовой стрелки). Через некоторое время звуковой сигнал выключится, а на дисплее появятся значения текущего угла в градусах.
Микропроцессор прибора анализирует скорость вращения рулевого колеса и при ее превышении автоматически отключает исполнительные устройства датчика и подает звуковой сигнал, а на дисплее появляется надпись «ВРАЩАЙ МЕДЛЕННЕЕ» и затем «ИЗМЕРЯЕМ СНОВА!». Для продолжения работы следует вернуть рулевое колесо в исходное положение (основной блок — в горизонтальной плоскости) и нажать кнопку 3. При ошибочном вращении рулевого колеса с основным блоком на дисплее появится надпись «ОШИБКА ВРАЩЕНИЯ!».
Рулевое колесо продолжают вращать до подачи прибором звукового и светового сигналов, соответствующих положению рулевого управления «Люфт выбран» и сообщающих оператору об окончании измерения. С этого момента измерение угла не производится, и оператор должен вернуть рулевое колесо в исходное положение.
С этого момента измерение угла не производится, и оператор должен вернуть рулевое колесо в исходное положение.
На дисплее индицируется результат измерения: «S-й УГОЛ =…» и звучит сигнал, после которого оператор может нажать кнопку 3 для повторного измерения и продолжить работу или выключить питание прибора, нажав кнопку 1.
После выключения прибора на датчике надо зафиксировать опорную планку 8 в положении «Закр.».
По окончании всех измерений оператор отсоединяет разъем кабеля 4, соединяющего основной блок с датчиком, снимает прибор за ручки захвата с рулевого колеса и (при необходимости) заряжает аккумулятор.
Информация обрабатывается микропроцессором в основном блоке, а результат индицируется на однострочном дисплее основного блока.
| Однако и издержки инфляции, и опасность того, что она ускорится, как только здесь будет допущен люфт, возможно, преувеличены. | |
Рычаги подвески и втулки должны быть достаточно жесткими, чтобы свести к минимуму люфт и обеспечить соответствие под действием максимальных тормозных сил. | |
| Одна из её форм – «люфт оптимизма»: люди склонны оптимистичнее оценивать личную ситуацию, чем обстоятельства жизни других людей или общества в целом. | |
| Этот люфт является результатом углового момента катушки и лески, который отсутствует у неподвижной катушки или спиннинга. | |
| Брюс и его товарищи также узнают, к своему ужасу, что 50 заключенных из Шталага Люфт III были расстреляны за побег. | |
| В случае большой шестерни и маленькой шестерни, однако, люфт обычно полностью снимается с шестерни, и шестерня получает полноразмерные зубья. | |
| Они рассказывали истории о реальных побегах из немецких лагерей военнопленных, таких как Шталаг Люфт III во время Второй мировой войны. | |
| Люфт-лимузин был разработан Igo Etrich, строителем Etrich Taube. | |
| Люфт-лимузин был первым военным монопланом с закрытой кабиной. | |
Во время Первой мировой войны люфт-лимузин использовался австро-венгерской армией. | |
| В частном случае для подшипников и крепежных деталей преднатяг уменьшает или устраняет люфт или мертвые зоны. | |
| Люфт-это ошибка в движении, возникающая при изменении направления передачи. | |
| Поэтому зубчатые пары рассчитаны на некоторый люфт. | |
| Люфт также может быть обеспечен путем перемещения шестерен дальше друг от друга. | |
| После пленения Брюса отправили в Дулаг-люфт, откуда из лагеря его немедленно отправили в Хоэмарк для лечения ожогов. | |
| Люфт зубчатой передачи равен сумме люфтов каждой пары шестерен, поэтому в длинных цепях люфт может стать проблемой. | |
| Для ситуаций, требующих точности, таких как контрольно-измерительные приборы и контроль, люфт может быть сведен к минимуму с помощью одного из нескольких методов. | |
| В паре шестерен люфт — это величина зазора между сопряженными зубьями шестерни. | |
Люфт неизбежен почти для всех реверсивных механических муфт, хотя его влияние можно свести на нет. | |
| Причины, по которым требуется люфт, включают в себя возможность смазки и теплового расширения, а также предотвращение заклинивания. | |
| Люфт также может быть вызван производственными ошибками и прогибом под нагрузкой. | |
| Ju 290 A-5, рабочий номер 0178, D-AITR, Бавария люфт-Ганзы вылетел в Барселону 5 апреля 1945 года, пилотируемый капитаном Слузалеком. | |
| Он провел пять лет в качестве военнопленного в Шталаге Люфт III. | |
| Он провел пять лет в качестве военнопленного в Шталаге Люфт III. | |
| Он был отправлен в лагерь военнопленных Шталаг Люфт III в Польше, специализированный лагерь Люфтваффе для военнопленных военнослужащих союзных ВВС. | |
| Он переносил сильную боль и неудобства путешествия в Дулаг-люфт с поразительной стойкостью. | |
| Тормозы доступны в нескольких напряжениях и могут иметь либо стандартный люфт, либо нулевой люфт ступиц. | |
В Шталаге Люфт III он провел месяц в лазарете, приходя в себя. | |
| В конце января 1945 года все военнопленные Шталаг Люфт III были насильно отправлены в другие лагеря военнопленных дальше по территории Германии. | |
| Летчики были отправлены в Шталаг Люфт III, лагерь военнопленных Люфтваффе близ Сагана в Германии, недалеко от польской границы. | |
| Роуч был заключен в тюрьму в Шталаг Люфт I. Тандерболт получил немецкую маркировку. | |
| На следующее утро он был взят в плен и провел остаток войны в Шталаг-Люфт I в Барте, Германия. | |
| Сама люфт отрицала, что имела какие-либо контакты со Службой безопасности. | |
| Люфт был возмущен тем, что никто из архивного агентства не удосужился сообщить ей, что у них есть копия ключа от ее входной двери. | |
| Люфт был возмущен тем, что никто из архивного агентства не удосужился сообщить ей, что у них есть копия ключа от ее входной двери. | |
С 1963 по 1971 год люфт был зарегистрирован как информатор Штази под кодовым именем IM Gisela. | |
| В 1989 году Криста люфт вошла в политику во время Национального переходного периода. | |
| Криста люфт была членом ученого общества Лейбница с 1993 года. | |
| Сама люфт отрицала, что имела какие-либо контакты со Службой безопасности. | |
| Люфт был возмущен тем, что никто из архивного агентства не удосужился сообщить ей, что у них есть копия ключа от ее входной двери. | |
| Например, одна граната, известная как люфт-граната, способна создать куполообразный барьер, в который игрок может войти для укрытия. | |
| Поскольку математические модели включают в себя реальные ограничения, такие как люфт шестерни и отскок от жесткой остановки, уравнения становятся нелинейными. | |
| Шариковые винты также могут уменьшить или устранить люфт, распространенный в комбинациях свинцовых винтов и гаек. | |
| Другие результаты | |
Измерение суммарного люфта в рулевом управлении | Взвешивание грузовых и легковых автомобилей в СПб и области
Согласно перечню неисправностей и условий, при которых запрещается эксплуатация транспортных средств (в редакции Постановления Правительства Российской Федерации от 21 февраля 2002 г. N 127) запрещается эксплуатация ТС если суммарный люфт в рулевом управлении превышает следующие значения:
N 127) запрещается эксплуатация ТС если суммарный люфт в рулевом управлении превышает следующие значения:
| Суммарный люфт не более (градусов) | |
| Легковые автомобили и созданные на их базе грузовые автомобили и автобусы | 10 |
| Автобусы | 20 |
| Грузовые автомобили | 25 |
О важности рулевой системы автомобиля не стоит упоминать лишний раз, поскольку всем и так ясно, что она играет ключевую роль в безопасности вождения. Вот почему не следует пренебрегать регулярным техосмотром и ремонтом всех деталей этой системы, ведь частая эксплуатация ведет к снашиванию даже наиболее надёжных узлов и агрегатов. Самый распространённый симптом неисправности заключается в таком явлении, как люфт рулевого колеса. Любой мало-мальски грамотный и ориентирующийся в пдд автомобилист должен быть знаком с этим термином, чтобы уметь, при желании вовремя диагностировать и устранить проблему.
Любой мало-мальски грамотный и ориентирующийся в пдд автомобилист должен быть знаком с этим термином, чтобы уметь, при желании вовремя диагностировать и устранить проблему.
Что такое люфт
Для того, чтобы понять как работает суммарный люфт в рулевом управлении, нужно немного разобраться в конструкции рулевой системы. С технической точки зрения это можно описать примерно так: в передаче рулевых тяг есть шток, который зафиксирован неплотно, с зазором в 1-2 миллиметра. Если бы не это расстояние, то все входящие в зацепление детали снашивались бы намного быстрее, в результате сильного трения. Зазор же позволяет удерживать зацеп, при этом не соприкасаясь со стенками зубцов передачи – отсюда и возникает люфт.
С позиции водителя люфт определяется как свободный ход руля, необходимый для получения отклика элемента системы, которым вы управляете (в нашем случае это передние колеса). Проще говоря — это расстояние, которое преодолевает рулевое колесо, прежде чем машина сделает определенный маневр. Это явление нельзя назвать негативным, поскольку минимальный люфт присутствует в управлении любого автомобиля и увеличивается пропорционально размеру транспортного средства.
Это явление нельзя назвать негативным, поскольку минимальный люфт присутствует в управлении любого автомобиля и увеличивается пропорционально размеру транспортного средства.
Однако спустя продолжительное время эксплуатации люфт возрастает до опасного уровня, когда автомобиль перестаёт слушаться и с опозданием реагирует на «команды» водителя.
Если вовремя не среагировать и не устроить проверку, в лучшем случае вас ждет дорогой ремонт, в худшем — согласно ПДД ваш автомобиль становится потенциальным источником опасности на дороге.
Причины люфта
Искать причину появления люфта нужно, конечно же, в конструкции системы рулевого управления:
- Для начала устраивается проверка состояния рулевых тяг, а также наконечников. Последние довольно часто выходят из строя, и это может стать причиной слишком большого свободного хода рулевого колеса.
- Кроме того, источником проблемы может стать разваленный, или почти разваленный ступичный подшипник.
- Если ходовая часть вашего автомобиля недавно ремонтировалась, то появившийся люфт может быть следствием этого.
 К примеру, очень часто механики забывают как следует затянуть центральную гайку подшипника ступицы, что не лучшим образом влияет на работу рулевой системы.
К примеру, очень часто механики забывают как следует затянуть центральную гайку подшипника ступицы, что не лучшим образом влияет на работу рулевой системы. - Также причиной может стать выход из строя верхней или нижней шаровой опоры, или же перетянутая рулевая рейка.
- Иногда люфт появляется, если требуется замена гидравлического масла – эта простая процедура может устранить лишний свободный ход.
В целом же, практически всегда люфт провоцирует какая-либо неисправность в цепочке руль-рейка-тяги-колеса. Для того чтобы выявить причину, нужно пройтись по каждому звену, тщательно проверить детали и выявить, где и что было не докручено — поскольку как раз этот элемент и стопорит работу управления. Но для того, чтобы не перепутать люфт с какими-либо другими неисправностями, нужно изучить его практические симптомы.
Признаки
Если ходовая часть автомобиля становится все менее чувствительной к вашим воздействиям, значит, пора проанализировать появившиеся проблемы в управлении. Предельное допустимое значение свободного хода руля ровняется 30 миллиметрам, или же 10 градусам, согласно ПДД. Любые отклонения от нормы считаются неисправностями.
Предельное допустимое значение свободного хода руля ровняется 30 миллиметрам, или же 10 градусам, согласно ПДД. Любые отклонения от нормы считаются неисправностями.
Для того чтобы определить укладывается ли люфт в этот параметр, нужно устроить небольшую проверку:
- Для начала ставим двигатель на холостой ход и определяем передние колеса в такое положение, чтобы они были параллельны продольной оси автомобиля. Одновременно должен работать и гидравлический усилитель.
- Затем нужно слегка повертеть рулевое колесо в разных направлениях и зафиксировать тот момент, когда передние шины начинают движение. Всё расстояние, которое руль происходит «до» — это и есть свободный ход, то есть люфт.
- Для точной проверки можно разжиться люфтомером – это специальное устройство, с помощью которого контролируется суммарный люфт в рулевом управлении автомобиля. К примеру, механическая модель люфтомера К 524 М может использоваться как в условиях домашнего гаража, так и в профессиональных автомастерских.
 Люфтомер 524 поможет определить свободный ход всего за три минуты – включая установку и снятие устройства. Такая проверка является самым простым и удобным вариантом.
Люфтомер 524 поможет определить свободный ход всего за три минуты – включая установку и снятие устройства. Такая проверка является самым простым и удобным вариантом.
Хотя на самом деле неважно, что именно помогло вам диагностировать неполадку – люфтомер или простые измерительные инструменты. Если проблема определена, нужно заняться её устранением.
Надежная стратегия управления переключением для системы передачи с неизвестным люфтом
В этом документе предлагается надежная стратегия управления переключением для системы передачи с неизвестным люфтом. Во-первых, анализируются неблагоприятные эффекты нелинейности люфта в системе передачи. Затем исследуются модель люфта и различные режимы работы трансмиссии с люфтом. Для каждого рабочего режима разработан отдельный контроллер, чтобы сделать систему устойчивой к неизвестному люфту и различным частотам входного сигнала.Кроме того, предлагается диспетчерский контроллер для оценки текущего режима системы трансмиссии и координации переключения контроллера между различными режимами. Моделирование проводится для проверки того, что наша стратегия управления переключением может эффективно уменьшить колебания, вызванные люфтом, и достаточно устойчива к изменению частоты входного сигнала.
Моделирование проводится для проверки того, что наша стратегия управления переключением может эффективно уменьшить колебания, вызванные люфтом, и достаточно устойчива к изменению частоты входного сигнала.
1. Введение
В промышленных приложениях широко используется конструкция трансмиссии с зубчатыми колесами. Однако такая конструкция трансмиссии обычно оставляет зазор между двумя контактирующими зубьями шестерни, в котором накапливается смазочное масло и компенсируется изменение размера, вызванное температурой и упругой деформацией.Кроме того, некоторые неизбежные ошибки при производстве и сборке шестерен также приводят к образованию зазора между зубьями шестерен, которые входят в зацепление друг с другом.
В системе трансмиссии с люфтом, когда ведущая шестерня меняет направление, ведомая шестерня будет неконтролируемой из-за наличия люфта. Ведомая шестерня не может управляться ведущей шестерней до тех пор, пока ведущая и ведомая шестерни снова не соприкоснутся, что приводит к ошибке отслеживания. Между тем, из-за наличия люфта соотношение между выходным валом и входным валом в системе трансмиссии становится нелинейным, что усложняет задачу управления такой системой.Более того, когда ведущая шестерня и ведомая шестерня снова соприкасаются, произойдет удар, который ухудшит характеристики отслеживания системы. Все вышеперечисленные факторы будут отрицательно влиять на точность управления трансмиссионной системой [1].
Между тем, из-за наличия люфта соотношение между выходным валом и входным валом в системе трансмиссии становится нелинейным, что усложняет задачу управления такой системой.Более того, когда ведущая шестерня и ведомая шестерня снова соприкасаются, произойдет удар, который ухудшит характеристики отслеживания системы. Все вышеперечисленные факторы будут отрицательно влиять на точность управления трансмиссионной системой [1].
Некоторые методы компенсации были предложены для смягчения неблагоприятных эффектов, вызванных люфтом в системе передачи. Эти методы можно разделить на два типа: компенсация на основе механических методов и компенсация на основе методов управления.
Из механических методов в [2] предложена двухмоторная конфигурация. Хотя этот метод может устранить нелинейные эффекты люфта, стоимость конфигурации с двумя двигателями высока. А конфигурация с двумя двигателями увеличит как энергопотребление, так и общий вес системы.
Методы, основанные на управлении, компенсируют нелинейность люфта за счет разработки соответствующего алгоритма управления. В [3] реализована стратегия управления переключением, которая использует пропорционально-интегральный контроллер для режима контакта и пропорциональный контроллер для режима люфта.В этой стратегии, хотя ведущая шестерня может плавно проходить люфт и оказывать меньшее воздействие при повторном контакте с ведомой шестерней, переходное время является большим, когда частота входного сигнала низкая, что вызывает плохие переходные характеристики. В литературе для устранения люфта широко используется обратная модель [4–6]. Для модели люфта с неизвестными параметрами можно построить обратную модель, оценив неизвестные параметры в режиме онлайн. Тогда нелинейность люфта может быть устранена с помощью обратной модели.Однако эффективность обратной модели во многом зависит от точности модели люфта. В практических приложениях размер люфта обычно изменяется вокруг стандартного размера из-за точности изготовления и производственных условий, что делает ошибку оценки неизбежной. Поскольку точность обратной модели падает, мы не можем получить удовлетворительную компенсацию.
В [3] реализована стратегия управления переключением, которая использует пропорционально-интегральный контроллер для режима контакта и пропорциональный контроллер для режима люфта.В этой стратегии, хотя ведущая шестерня может плавно проходить люфт и оказывать меньшее воздействие при повторном контакте с ведомой шестерней, переходное время является большим, когда частота входного сигнала низкая, что вызывает плохие переходные характеристики. В литературе для устранения люфта широко используется обратная модель [4–6]. Для модели люфта с неизвестными параметрами можно построить обратную модель, оценив неизвестные параметры в режиме онлайн. Тогда нелинейность люфта может быть устранена с помощью обратной модели.Однако эффективность обратной модели во многом зависит от точности модели люфта. В практических приложениях размер люфта обычно изменяется вокруг стандартного размера из-за точности изготовления и производственных условий, что делает ошибку оценки неизбежной. Поскольку точность обратной модели падает, мы не можем получить удовлетворительную компенсацию.
Для решения вышеупомянутых проблем в этом документе предлагается надежная стратегия управления переключением для системы передачи с неизвестным люфтом.В контактном режиме система использует линейный контроллер. В режиме люфта система использует составной контроллер, который использует линейный контроллер и контроллер компенсации люфта вместе, чтобы устранить нелинейность, вызванную неизвестным люфтом. При разработке контроллера мы учитываем сокращение не только переходного времени, но и ударного воздействия при повторном контакте шестерен. Кроме того, стратегия управления устойчива к частоте входного сигнала. Как показывает моделирование, при такой стратегии управления переключением система имеет меньше установившихся ошибок и колебаний, особенно при низкой частоте входного сигнала.
Остальная часть этого документа организована следующим образом. В разделе 2 мы представляем рассматриваемую модель люфта. Подробности нашей стратегии управления переключением приведены в Разделе 3. Результаты моделирования показаны в Разделе 4. Некоторые заключительные замечания помещены в Раздел 5.
Результаты моделирования показаны в Разделе 4. Некоторые заключительные замечания помещены в Раздел 5.
2. Модель люфта
В обзорной статье [1] несколько моделей люфта имеют были упомянуты, такие как модель мертвой зоны, модель гистерезиса и точная модель. В частности, модель мертвой зоны не только хорошо описывает нелинейность люфта, но и относительно легко реализуется.Итак, в этой статье для описания люфта используется модель мертвой зоны.
Рассмотрим двухмассовую систему, две части которой соединены шестернями. Чтобы упростить анализ, предположим, что передаточное число равно 1. Если передаточное число не равно 1, до тех пор, пока ведомая шестерня может быть уменьшена до ведущей шестерни, последующие уравнения все еще остаются в силе. Принципиальная схема двухмассовой системы с люфтом показана на рисунке 1.
Динамические уравнения для двухмассовой системы на рисунке 1 приведены ниже: где и — моменты инерции ведущей шестерни и ведомой шестерни, соответственно, — коэффициенты вязкого трения ведущей шестерни и ведомой шестерни, соответственно, — крутящий момент двигателя, — передаваемый крутящий момент на валу, и — вращающие скорости ведущей шестерни и ведомой шестерни соответственно, а и — угловое смещение ведущей шестерни и ведомой шестерни, соответственно.
Согласно модели мертвой зоны, передаваемый крутящий момент на валу между ведущей шестерней и ведомой шестерней равен где — разница углового смещения между ведущей шестерней и ведомой шестерней, и — коэффициент упругости и коэффициент демпфирования соединения ведущей шестерни и ведомой шестерни, и — стандартный размер люфта.
Внимательно изучив модель мертвой зоны, мы видим, что контактная поверхность шестерни считается упругой.Эта точка зрения также была принята в [7]. Интенсивность удара, вызванного столкновением ведущей шестерни и ведомой шестерни, определяется коэффициентом упругости соединения и величиной люфта. Чем больше коэффициент упругости стыка, тем больше сила удара; то есть легче произвести большие колебания системы передачи. Более того, когда размер люфта большой, колебания системы передачи также будут большими.
3. Конструкция контроллера
3.1. Режимы систем передачи с люфтом
Системы передачи с люфтом имеют три режима, включая режим люфта, режим положительного контакта и режим отрицательного контакта. Такие системы переключаются между этими режимами в соответствии с логическим правилом. Диаграмма перехода между режимами показана на рисунке 2.
Такие системы переключаются между этими режимами в соответствии с логическим правилом. Диаграмма перехода между режимами показана на рисунке 2.
Выберите,, и в качестве переменных состояния и представьте их с помощью,, и, соответственно. Итак, уравнение состояния каждой моды может быть получено из (1) и (2).
Уравнение состояния в режиме люфта
Уравнение состояния в режиме положительного контакта:
Уравнение состояния в режиме отрицательного контакта Режимы переключаются в соответствии с правилом, показанным на рисунке 2. Существует два вида последовательностей переключения, которые описаны ниже. (i) Одна последовательность переключения направлена на переключение из режима отрицательного контакта в режим положительного контакта. В этой последовательности система запускается из режима отрицательного контакта и имеет неотрицательный передаваемый крутящий момент на валу.Затем система переходит в режим люфта. По истечении конечного времени (которое подробно объясняется в разделе 3. 5) ведущая и ведомая шестерни снова контактируют, и система переходит в режим положительного контакта, целевой режим, и будет оставаться в этом режиме до следующего изменения опорного сигнала. (ii) Другая последовательность переключения направлена на переключение из режима положительного контакта в режим отрицательного контакта. В этой последовательности система запускается из режима положительного контакта и переключается в режим люфта из-за неположительного положения.Опять же, по истечении конечного времени ведущая и ведомая шестерни соприкасаются, и система переходит в режим отрицательного контакта и будет оставаться в нем до следующего изменения опорного сигнала. Как упоминалось выше, режим люфта выглядит как режим « переходный ». Однако он играет решающую роль. Когда система переключается из режима люфта в режим положительного или отрицательного контакта, ведущая и ведомая шестерни снова контактируют. Если этот контакт не является плавным, система страдает от импульса и ухудшается качество управления.
5) ведущая и ведомая шестерни снова контактируют, и система переходит в режим положительного контакта, целевой режим, и будет оставаться в этом режиме до следующего изменения опорного сигнала. (ii) Другая последовательность переключения направлена на переключение из режима положительного контакта в режим отрицательного контакта. В этой последовательности система запускается из режима положительного контакта и переключается в режим люфта из-за неположительного положения.Опять же, по истечении конечного времени ведущая и ведомая шестерни соприкасаются, и система переходит в режим отрицательного контакта и будет оставаться в нем до следующего изменения опорного сигнала. Как упоминалось выше, режим люфта выглядит как режим « переходный ». Однако он играет решающую роль. Когда система переключается из режима люфта в режим положительного или отрицательного контакта, ведущая и ведомая шестерни снова контактируют. Если этот контакт не является плавным, система страдает от импульса и ухудшается качество управления. Кроме того, ожидается, что время от режима люфта до режима контакта (положительного или отрицательного) будет коротким, чтобы ускорить отслеживание опорного сигнала. Таким образом, мы хотим разработать контроллер, в частности контроллер в режиме люфта, чтобы система могла быстро и плавно перейти в контактный режим из режима люфта.
Кроме того, ожидается, что время от режима люфта до режима контакта (положительного или отрицательного) будет коротким, чтобы ускорить отслеживание опорного сигнала. Таким образом, мы хотим разработать контроллер, в частности контроллер в режиме люфта, чтобы система могла быстро и плавно перейти в контактный режим из режима люфта.
3.2. Контроллер для контактного режима
При контакте ведущей и ведомой шестерен система трансмиссии становится системой линейной трансмиссии.При этом разница между системой в контактном режиме и системой трансмиссии без люфта состоит в том, что передаваемый крутящий момент на валу системы в контактном режиме меньше, чем у системы без люфта. Следовательно, мы можем использовать метод проектирования линейного регулятора для системы без люфта, чтобы спроектировать регулятор для контактного режима.
Для системы без люфта ее динамика все еще регулируется (1). Но передаваемый крутящий момент на валу отличается, что выражается как Передаточная функция может быть получена из (1) и (6) следующим образом: где Учитывая эту передаточную функцию, мы можем спроектировать линейный регулятор в частотной области с помощью метода графика Боде [8]. В результате система передачи без люфта может точно отслеживать входной сигнал через линейный контроллер. Таким образом, мы можем реализовать этот контроллер, когда система передачи с люфтом находится в контактном режиме.
В результате система передачи без люфта может точно отслеживать входной сигнал через линейный контроллер. Таким образом, мы можем реализовать этот контроллер, когда система передачи с люфтом находится в контактном режиме.
3.3. Контроллер для режима люфта
Задача контроллера для режима люфта — не только заставить ведущую шестерню быстро пройти люфт, но и минимизировать интенсивность удара при повторном контакте ведущей шестерни и ведомой шестерни.Таким образом, требуется, чтобы ведущая шестерня быстро ускорялась в течение периода люфта и чтобы замедление ведущей шестерни было также достаточно большим, чтобы минимизировать относительную скорость между ведущей шестерней и ведомой шестерней, когда они находятся близко друг к другу. Таким образом, компенсация люфта делится на два этапа, включая компенсацию периода разгона и компенсацию периода замедления. Чтобы упростить анализ, мы предполагаем, что ведущая шестерня находится в стадии положительного движения, что означает, что ведущая шестерня переключается в режим положительного контакта из режима отрицательного контакта или режима люфта. Анализ отрицательного движения аналогичен.
Анализ отрицательного движения аналогичен.
3.3.1. Контроллер периода разгона
Период разгона означает, что ведущая шестерня должна быстро ускоряться, когда она просто переходит в люфт. Контрольное значение для периода разгона составляет где — составляющая управления, которая определяется начальной скоростью, когда ведущая шестерня просто переходит в люфт, — это составляющая управления, заданная линейным контроллером, и — это составляющая управления, определяемая текущим зазором между ведущей и ведомой шестернями.
В период разгона, поскольку ведущая шестерня обычно должна замедлять ведомую шестерню, она ускоряется в направлении, противоположном своей начальной скорости, когда она просто превращается в люфт. Следовательно, контрольное значение для периода разгона должно содержать информацию о начальной скорости ведущей шестерни, когда она просто переходит в люфт. Этот управляющий компонент, содержащий информацию о начальной скорости ведущей шестерни, может быть установлен как где — положительное усиление, и — угловое смещение ведущей шестерни, которые измеряются фотоэлектрическими кодировщиками с высоким разрешением в момент, когда ведущая шестерня входит в люфт, и период выборки перед тем, как он входит в люфт, соответственно.
Контрольное значение для периода разгона также должно содержать информацию линейного регулятора. Выход линейного регулятора содержит информацию о погрешности между угловым смещением ведомой шестерни и заданным входным сигналом. Без информации линейного регулятора ускоренное движение ведущей шестерни станет слепым. Но линейный регулятор рассчитан на контактный режим. Его контрольное значение немного велико, потому что ведущая шестерня не нагружается во время люфта.Таким образом, выходной сигнал линейного регулятора должен быть уменьшен, прежде чем он будет добавлен к контрольному значению для периода ускорения. Компонент управления, содержащий информацию о линейном регуляторе, может быть вычислен как где — выход линейного регулятора для контактного режима, а — передаточное число.
Наконец, контрольное значение для периода ускорения должно также содержать информацию о текущем промежутке между ведущей и ведомой шестернями, потому что, когда ведущая шестерня вращается медленно, контрольное значение из-за ее начальной скорости становится очень малым на (10 ), и только управляющее значение от линейного регулятора влияет на ведущую шестерню. В этом случае возможно, что ускорение ведущей шестерни невелико, что, однако, приводит к длительному переходному времени, что означает плохие переходные характеристики. Следовательно, помимо компонента управления из-за начальной скорости и линейного регулятора, также требуется компонент управления, чтобы отражать текущий зазор между ведущей и ведомой шестернями. Этот управляющий компонент пропорционален текущему зазору. Этот элемент управления играет важную роль при медленном вращении ведущей шестерни и может быть выражен как где — положительное пропорциональное усиление.
В этом случае возможно, что ускорение ведущей шестерни невелико, что, однако, приводит к длительному переходному времени, что означает плохие переходные характеристики. Следовательно, помимо компонента управления из-за начальной скорости и линейного регулятора, также требуется компонент управления, чтобы отражать текущий зазор между ведущей и ведомой шестернями. Этот управляющий компонент пропорционален текущему зазору. Этот элемент управления играет важную роль при медленном вращении ведущей шестерни и может быть выражен как где — положительное пропорциональное усиление.
3.3.2. Контроллер для периода замедления
Цель контроллера в период замедления — минимизировать интенсивность удара, когда ведущая шестерня снова соприкасается с ведомой шестерней, чтобы минимизировать колебания системы трансмиссии. Контрольное значение для периода замедления составляет где — управляющий компонент для уменьшения разницы скоростей между ведущей и ведомой шестернями, а — управляющий компонент для уменьшения разницы в смещении между ними.
В целях минимизации колебаний системы трансмиссии с люфтом ожидается минимизация относительной скорости между ведущей и ведомой шестернями, когда они находятся близко друг к другу. Следовательно, одна из целей контроллера для периода замедления — уменьшить относительную скорость между двумя передачами в течение этого периода. Для этого этапа мы можем построить подсистему, в которой объектом, входом и выходом являются ведущая шестерня, скорость ведомой шестерни и скорость ведущей шестерни соответственно.Блок-схема системы показана на рисунке 3.
Для такой подсистемы мы используем пропорционально-интегральный контроллер с динамическим коэффициентом пропорциональности, чтобы уменьшить погрешность скорости между ведущей и ведомой шестернями. установлен как где — положительный коэффициент пропорциональности, а — коэффициент динамической пропорциональности, связанный с частотой входного сигнала. Выражение где — разница между входными сигналами в два недавних соседних момента дискретизации, — положительный коэффициент пропорциональности, который может изменять скорость затухания экспоненциальной функции, и — соответствующий коэффициент пропорциональности в период замедления, когда частота входного сигнала равна низкий. Причина использования такого динамического пропорционального коэффициента заключается в том, что пропорциональный контроллер для периода замедления чувствителен к изменению частоты входных сигналов. Когда частота входного сигнала низкая, разница скоростей между ведущей и ведомой шестернями мала, что требует большого коэффициента пропорциональности, чтобы генерировать соответствующую управляющую величину для замедления. Когда частота входного сигнала высока, разница скоростей между ведущей и ведомой шестернями велика, и коэффициент пропорциональности должен быть уменьшен; в противном случае ведущая шестерня может быть реверсирована из-за слишком большого количества управляющих сигналов.
Причина использования такого динамического пропорционального коэффициента заключается в том, что пропорциональный контроллер для периода замедления чувствителен к изменению частоты входных сигналов. Когда частота входного сигнала низкая, разница скоростей между ведущей и ведомой шестернями мала, что требует большого коэффициента пропорциональности, чтобы генерировать соответствующую управляющую величину для замедления. Когда частота входного сигнала высока, разница скоростей между ведущей и ведомой шестернями велика, и коэффициент пропорциональности должен быть уменьшен; в противном случае ведущая шестерня может быть реверсирована из-за слишком большого количества управляющих сигналов.
Помимо уменьшения разницы скоростей между ведущей и ведомой шестернями, нам также необходимо уменьшить разницу в перемещениях между двумя шестернями, чтобы их относительная скорость была небольшой при контакте. Следовательно, также необходим управляющий компонент для уменьшения разницы смещения, который выбирается как где — положительный коэффициент пропорциональности. Легко видеть, что вышеуказанный управляющий компонент связан с текущим зазором между ведущей шестерней и ведомой шестерней.
Легко видеть, что вышеуказанный управляющий компонент связан с текущим зазором между ведущей шестерней и ведомой шестерней.
3.4. Контроллер диспетчерского управления
3.4.1. Оценка текущего режима
Контроллер наблюдения оценивает текущий режим системы передачи, анализируя переменные состояния. Узнав текущий режим системы, диспетчерский контроллер переключается на соответствующий контроллер. Для системы трансмиссии с люфтом она имеет три режима, включая контактный режим, режим люфта с положительным движением и режим люфта с отрицательным движением.
Система находится в режиме люфта с положительным движением, когда выполняется условие (17): где означает логический и рабочий. Система находится в режиме люфта с отрицательным движением, когда выполняется условие (18): Система находится в контактном режиме при выполнении условия (19): где — ошибка между выходом системы передачи и входным сигналом и означает логическую операцию или.
Условия (17), (18) и (19) можно точно проверить. Чтобы повысить надежность системы, нам необходимо внести некоторые изменения в приведенные выше условия. Установлено, что система находится в режиме люфта с положительным движением, когда выполняется условие (20): Система находится в режиме люфта с отрицательным движением, когда выполняется условие (21): Система находится в контактном режиме, когда выполняется одно из трех условий (19), (22) и (23): где .
Чтобы повысить надежность системы, нам необходимо внести некоторые изменения в приведенные выше условия. Установлено, что система находится в режиме люфта с положительным движением, когда выполняется условие (20): Система находится в режиме люфта с отрицательным движением, когда выполняется условие (21): Система находится в контактном режиме, когда выполняется одно из трех условий (19), (22) и (23): где .
В измененных условиях учитывается текущий зазор между ведущей и ведомой шестернями, что означает, что если зазор меньше, чем в момент входа ведущей шестерни в люфт, система по-прежнему обрабатывается как в контактном режиме.Это связано с тем, что шестерня часто слегка дрожит в процессе передачи, что означает, что ведущая шестерня входит в люфт, но размер люфта слишком мал. Если порогового значения нет, небольшое дрожание будет расценено как режим люфта, который заставляет систему переключаться на контроллер для режима люфта в таком небольшом промежутке. Переключение в этой ситуации не только не нужно, но также может вызвать большее дрожание. Порог повысит устойчивость системы к такому небольшому дрожанию.
3.4.2. Стратегия переключения
В соответствии с измененными условиями диспетчерский контроллер оценивает текущий режим системы и переключается на соответствующий контроллер.
(a) Когда система находится в контактном режиме, диспетчерский контроллер переключается на контроллер для контактного режима.
(b) Когда система находится в режиме люфта с положительным движением, диспетчерский контроллер сначала переключается на контроллер на период ускорения, а затем переключается на контроллер на период замедления, когда выполняется условие (24): где и — величина зазора между ведущей и ведомой шестернями в момент перехода ведущей шестерни в режим люфта.
Контроллер-диспетчер переключается на линейный контроллер с контроллера на период замедления, когда выполняется условие (25): где . Обратите внимание, что вторая часть условия (25) предназначена для повышения устойчивости системы к изменению размера обратной косой черты. Поскольку размер люфта не всегда может быть равен стандартному размеру люфта на практике, мы не можем судить, контактируют ли ведущая и ведомая шестерни только по стандартному размеру люфта. Итак, вторая часть условия необходима.
(c) Когда система находится в режиме люфта с отрицательным движением, стратегия переключения аналогична таковой в режиме люфта с положительным движением. Нам просто нужно внести некоторые изменения в условия (24) и (25) в условия (26) и (27) соответственно.
Рассмотреть Информация о состоянии, необходимая в вышеуказанных условиях, может быть вычислена из углового смещения ведущей шестерни и углового смещения ведомой шестерни, которые могут быть получены с помощью двух фотоэлектрических кодировщиков с высоким разрешением.
3.5. Анализ устойчивости
Большую часть времени система работает в режиме контакта, в режиме положительного или отрицательного контакта. Поэтому сначала проанализируем устойчивость регулятора в контактных режимах. Рассматривая передаточную функцию в (7), мы видим, что это традиционная линейная система, и поэтому мы можем спроектировать контроллер методом графика Боде [8]. Обеспечить устойчивость системы в контактных режимах несложно. Итак, ключевым моментом общей устойчивости системы является устойчивость системы в режиме люфта.Более конкретно, мы покажем, что вышеупомянутые контроллеры могут гарантировать, что ведущая шестерня может быстро пройти через люфт за ограниченное время и минимизировать относительную скорость между ведущей и ведомой шестернями при их контакте; то есть режим люфта длится только конечное время.
Как показано в разделе 3.1, две последовательности переключения работают одинаково. Итак, мы рассматриваем только последовательность переключения из режима отрицательного контакта в режим положительного контакта. Когда условие в (20) удовлетворяется, диспетчерский контроллер может знать, что система входит в режим люфта с положительным перемещением, и принимает контроллер в (9).В это время ведущая шестерня покидает одну сторону ведомой шестерни и ускоряется, чтобы достичь другой стороны ведомой шестерни. Через некоторое время условие в (24) выполняется, система переходит в период торможения, и регулятор в (13) берется. Из-за субконтроллера в (14) относительная скорость между ведущей и ведомой шестернями начнет уменьшаться. Для контакта ведущей шестерни с ведомой шестерней требуется лишь конечное время из-за и. Обратите внимание, что до соприкосновения ведущей и ведомой шестерен, он не равен нулю и направлен на уменьшение зазора между ведущей и ведомой шестернями за конечное время.При контакте ведущей и ведомой шестерен их относительная скорость может отличаться от нуля и вызывать дрожание. К счастью, их относительная скорость не будет большой из-за замедляющих эффектов. Когда условие (25) выполнено, система выходит из режима люфта и переходит в режим положительного контакта. Как обсуждалось выше, общее время нахождения в режиме люфта ограничено.
4. Моделирование
В соответствии со стратегией управления переключением, упомянутой в разделе 3, мы используем MATLAB для моделирования рассматриваемой системы передачи.При моделировании параметры выбираются следующим образом: Вход системы — это, а выход системы -.
Когда входной сигнал представляет собой синусоидальный сигнал с частотой 0,16 Гц, отклик показан на рисунке 4. Чтобы более четко увидеть эффективность методов компенсации, мы сравним отклик системы без компенсации и отклик система с компенсацией на рисунках 5 и 6. Сравнивая реакцию на рисунках 5 и 6, становится ясно, что колебания системы значительно уменьшаются за счет компенсации.
Затем мы проверим эффективность контроллера переключения в ситуации, когда размер люфта не соответствует стандартному размеру люфта. Отклики системы с величиной люфта 0,08 рад и 0,12 рад показаны на рисунках 7 и 8 соответственно.
Из рисунков 4 и 5 видно, что система работает лучше в ситуации, когда размер люфта больше стандартного размера, и будет генерировать небольшое дрожание в ситуации, когда размер люфта меньше стандартного размера. .Это связано с тем, что, когда величина люфта меньше, произойдет небольшое столкновение, когда ведущая и ведомая шестерни снова соприкоснутся. Но система достаточно устойчива к изменению величины люфта.
Наконец, мы проверим эффективность контроллера переключения в ситуации, когда частота входного сигнала изменяется. Отклики при различных частотах входного сигнала, 1 Гц, 5 Гц и 10 Гц, показаны на рисунках 9, 10 и 11.
Мы видим, что система все еще может хорошо отслеживать входные сигналы. при изменении частоты входного сигнала.Таким образом, система устойчива к изменению частоты входного сигнала.
5. Выводы
В этом документе предлагается надежная стратегия управления переключением для системы передачи с неизвестным люфтом. Он анализирует возможные режимы, в которых может находиться система передачи, и разрабатывает соответствующие индивидуальные контроллеры для каждого режима. При разработке отдельных контроллеров учитывается неизвестный размер люфта и изменение частоты входного сигнала.Кроме того, он дает метод оценки текущего режима системы передачи и координации переключения между отдельными контроллерами. Моделирование проводится для проверки эффективности и надежности предложенной стратегии управления переключением.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации данной статьи.
Благодарности
Эта работа была частично поддержана Национальным фондом естественных наук Китая (61273112) и открытым финансированием из Ключевой лаборатории бортовой оптической визуализации и измерения CAS.
Управление механическими системами с люфтом — исследование
Маттиас Нордин родился в Лунде, Швеция, в 1967 году. Он получил гражданское образование. В 1992 г. получил диплом инженера-физика и кандидат технических наук. степень в области оптимизации и теории систем в 2001 году Королевского технологического института, Стокгольм, Швеция. Его civ. ing. Дипломная работа принесла ему награду Volvo в номинации «Технолог года 1993» Королевского института Volvo. С 1995 года он работает в ABB Process Industries, Вестерос, Швеция, где в настоящее время возглавляет отдел развития прокатных станов.В настоящее время его исследовательские интересы связаны с разработкой надежного управления приводами прокатных станов, в частности, для минимизации механического износа при максимальных динамических характеристиках.
Пер-Улоф Гутман родился 21 мая 1949 года в городе Хёганас, Швеция. Он получил гражданское образование. ing. Кандидат технических наук в 1973 г., кандидат технических наук. степень в области автоматического управления и звание доцента в области автоматического управления в 1988 году, все из Технологического института Лунда, Лунд, Швеция. Как стипендиат программы Фулбрайта он получил премию М.S.E. Степень в 1977 году в Калифорнийском университете в Лос-Анджелесе. Он преподавал математику в Танзании, 1973–1975. С 1983 по 1984 год он занимал пост-докторскую должность на факультете электротехники Техниона — Израильского технологического института, Хайфа, Израиль. В 1984–1990 гг. Он был научным сотрудником отдела систем управления компании El-Op Electro-Optics Industries, Реховот, Израиль, где он проектировал высокоточные электрооптические и электромеханические системы управления. С 1990 года он работает на факультете сельскохозяйственной инженерии Техниона в Хайфе, где в настоящее время занимает должность доцента.Он провел несколько периодов в качестве приглашенного исследователя в Отделе оптимизации и теории систем Королевского технологического института, Стокгольм, Швеция, и год творческого отпуска (1995–1996) в LAG, INPG, Гренобль, Франция. Его исследовательские интересы включают надежное и адаптивное управление, управление нелинейными системами, автоматизированное проектирование, а также управление и моделирование сельскохозяйственных систем.
Copyright © 2002 Elsevier Science Ltd. Все права защищены.
% PDF-1.3 % 75 0 obj> эндобдж xref 75 86 0000000016 00000 н. 0000002764 00000 н. 0000002898 00000 н. 0000002057 00000 н. 0000002978 00000 н. 0000003165 00000 н. 0000003454 00000 н. 0000003877 00000 н. 0000004291 00000 н. 0000011963 00000 п. 0000012503 00000 п. 0000012729 00000 п. 0000013128 00000 п. 0000018777 00000 п. 0000019111 00000 п. 0000019262 00000 п. 0000019629 00000 п. 0000023230 00000 н. 0000023502 00000 п. 0000023578 00000 п. 0000023659 00000 п. 0000023960 00000 п. 0000024552 00000 п. 0000024779 00000 п. 0000025008 00000 п. 0000025324 00000 п. 0000025562 00000 п. 0000026390 00000 п. 0000026828 00000 п. 0000027708 00000 п. 0000028328 00000 п. 0000029523 00000 п. 0000030839 00000 п. 0000031132 00000 п. 0000031367 00000 п. 0000031759 00000 п. 0000037581 00000 п. 0000037973 00000 п. 0000038247 00000 п. 0000038542 00000 п. 0000039275 00000 п. 0000039458 00000 п. 0000040064 00000 н. 0000041392 00000 п. 0000041555 00000 п. 0000041885 00000 п. 0000043084 00000 п. 0000043381 00000 п. 0000043645 00000 п. 0000044190 00000 п. 0000044397 00000 п. CXo> 8MdZjau @ 5 = Pw \]% g٨a ۈ n? 7NQv] DljLCb,; _) eVĻCLll) w4eQbng̓ ($ aMp $ + 8G} * c`U% Wc1M ? D`oV: t6zh * B: z’Lr’Z [H ۘ jl = @ hsqԈ N
Люфт шестерни | KHK Шестерни
Для плавного вращения зацепленных шестерен необходим люфт.Люфт — это величина, на которую расстояние между зубьями превышает толщину зуба шестерни, входящего в зацепление. Люфты классифицируются следующим образом.
6.1 Типы люфтов (1) Люфт по окружности (j t)
Окружной люфт — это длина дуги на делительной окружности. Длина — это расстояние, на которое шестерня поворачивается до тех пор, пока зацепленная боковая поверхность зуба не войдет в контакт, в то время как другая сопряженная шестерня остается неподвижной.
(2) Нормальный люфт (j n)
Минимальное расстояние между каждой поверхностью зацепления зуба в паре шестерен, когда оно установлено таким образом, чтобы поверхности зуба соприкасались.
(3) Угловой люфт (j θ )
Максимальный угол, под которым шестерня может двигаться, когда другая сопряженная шестерня остается неподвижной.
(4) Радиальный люфт (j r)
Радиальный люфт — это усадка (смещение) на указанном межосевом расстоянии, когда оно установлено таким образом, чтобы боковые поверхности зубьев парных зубчатых колес соприкасались друг с другом.
(5) Осевой люфт (j x)
Осевой люфт — это усадка (смещение) на указанном межосевом расстоянии, когда пара
конические шестерни
установлен так, чтобы боковые поверхности зацепленных зубьев парных шестерен соприкасались друг с другом.
Рис. 6.1 Окружной люфт — нормальный люфт и радиальный люфт
Таблица 6.1 показывает взаимосвязь между люфтами и основными уравнениями. В то время как конические шестерни представляют собой шестерни конической формы, вместо радиального люфта учитывается осевой люфт.
Таблица 6.1 Взаимосвязь люфтов
Рис. 6.2 Осевой люфт конической шестерни
(1) Люфт шестерни параллельной оси
В таблице 6.2 приведены примеры расчета люфтов и межосевого расстояния
цилиндрическое прямозубое колесо
а также
косозубая шестерня
сетки.Регулируя межосевое расстояние (радиальный люфт), можно контролировать люфт.
Таблица 6.2 Сетка прямозубой и косозубой шестерни
(2) Люфт зубчатой передачи пересекающихся осей
В таблице 6.3 приведены примеры расчета люфтов и установочного расстояния конических зубчатых зацеплений. Обычный способ контролировать люфт конических зубчатых колес — регулировать монтажное расстояние (осевой люфт) путем добавления регулировочных шайб. При регулировке монтажного расстояния важно поддерживать надлежащий контакт зубьев с учетом баланса шестерен и шестерен.
Таблица 6.3 Сетка конической зубчатой передачи
(3) Люфт сетки непараллельных и непересекающихся осей
В таблице 6.4 приведены примеры расчета люфтов и монтажного расстояния
червячный редуктор
сетки.
Пара червячных шестерен имеет различный окружной люфт для каждой ведущей и ведомой шестерен (червяка и колеса), и это характерно для пары червячных шестерен.
Таблица 6.4 пары сеток червячной передачи
Таблица 6.5 Пример расчета зазора винтовых зубчатых зацеплений.
Таблица 6.5 Винтовая зубчатая сетка
Есть два способа создания люфта. Один из них — увеличить межосевое расстояние. Другой — уменьшить толщину зуба. Последний гораздо популярнее первого. Мы собираемся подробнее обсудить способ уменьшения толщины зуба.
В РАЗДЕЛЕ 5 мы обсудили стандартную толщину зуба s1 и s2. При зацеплении пары шестерен, если бы толщина зубьев шестерни и шестерни была уменьшена на Δs1 и Δs2, они создавали бы люфт Δs1 и Δs2 в направлении делительной окружности. Пусть величина Δs1 и Δs2 равна 0,1., Мы знаем, что a = 20 градусов, тогда:
Преобразуем в люфт по нормали jn:
Пусть люфт в направлении межосевого расстояния будет jr, тогда:
Они выражают взаимосвязь между несколькими видами люфтов.При применении следует обращаться к стандарту JIS. Существует два стандарта JIS для люфта: один — JIS B 1703-76 (подвесной стандарт) для цилиндрических и косозубых шестерен, а другой — JIS B 1705-73 для конических зубчатых колес. Все эти стандарты регулируют стандартные люфты в направлении делительной окружности jt или jtt. Эти стандарты могут применяться напрямую, но люфт, выходящий за рамки стандартов, может также использоваться для специальных целей. При написании толщины зуба на чертеже необходимо дополнительно указать допуски на толщину, а также люфт.
Например:
Поскольку толщина зуба напрямую связана с люфтом, допуски на толщину станут очень важным фактором.
До сих пор в обсуждениях участвовала одна пара шестерен. Теперь мы собираемся обсудить двухступенчатые зубчатые передачи и их люфт. В двухступенчатой зубчатой передаче, как показано на Рисунке 6.3, jt1 и jt4 представляют люфты зубчатой передачи первой ступени и зубчатой передачи второй ступени соответственно.
Рис.6.3 Суммарный накопленный люфт двухступенчатой зубчатой передачи
Если бы передача номер один была фиксированной, то суммарный люфт на передаче номер четыре jtT4 был бы следующим:
Этот накопленный люфт можно преобразовать во вращение в градусах:
Случай заднего хода предназначен для фиксации четвертой передачи и проверки накопленного люфта на первой передаче jtT1.
Этот накопленный люфт можно преобразовать во вращение в градусах:
6.5 Метод уменьшения люфта (шестерни с нулевым люфтом)Низкий или нулевой люфт — это характеристики, необходимые для высокоточных зубчатых передач. Чтобы удовлетворить особые потребности, прецизионные шестерни используются чаще, чем когда-либо прежде. В этом разделе представлены методы уменьшения или устранения люфта.
(1) Использование шестерен с меньшим утонением зубьев (общий метод)
Обработка зубчатых колес с меньшим утонением зубьев, чем у обычных зубчатых колес, и использование их с фиксированным межосевым или установочным расстоянием на нормальных значениях, позволяет уменьшить люфт. Этот метод нельзя использовать для устранения люфта, но это наиболее простой способ, применимый ко многим типам шестерен. Если вы используете шестерню с малым биением, вы можете уменьшить вариацию люфта. Речь идет о нулевом люфте.Следует внимательно учитывать, что шестерня не может вращаться плавно, если значение создаваемого люфта равно нулю.
(2) Использование шестерен, регулируемых для небольшого люфта
Способ использования шестерен для регулировки низкого люфта. С помощью этого метода не может быть получен нулевой люфт.
(a) Регулировка люфта регулировкой межосевого расстояния
Этот метод применим для прямозубых, косозубых, винтовых и червячных передач. Уменьшение межосевого расстояния шестерни позволяет регулировать радиальные люфты и уменьшать люфт.Регулировка межосевого расстояния сложна.
(b) Регулировка люфта регулировкой монтажного расстояния
Для конических зубчатых колес сокращение монтажного расстояния зубчатого колеса позволяет контролировать осевые люфты и уменьшать люфт. Регулировка межосевого расстояния довольно сложна, если регулировать монтажное расстояние только одной из спаренных конических шестерен, это создает плохой контакт зубьев. Монтажное расстояние каждого зубчатого зацепления должно быть отрегулировано одинаково., этот метод обычно выполняется регулировкой регулировочных шайб.
(c) Контроль люфта путем разделения шестерни на две части
Этот метод применим для большинства типов шестерен. Разделение шестерни на две части и регулировка и фиксация фазовых соотношений между положением зубьев каждой из них обеспечивает низкий люфт. Это показано на рис. 6.4.
Рис. 6.4 Шестерни разделены на две части. (Фиксированный)
Для косозубых или червячных шестерен существует способ регулировки фазового соотношения между положением зубьев каждой зацепленной шестерни путем перемещения одной из парных шестерен (1) в осевом направлении.На рис. 6.5 показано основание.
Рис. 6.5 Регулировка люфта косозубой шестерни
(d) Конические зубчатые колеса (прямозубые и конические зубчатые колеса).
зубчатые рейки
)
Конические шестерни также называют коническими шестернями. Поскольку конические шестерни представляют собой шестерни конической формы с непрерывно смещенными зубьями, профиль зуба / толщина зуба постоянно изменяются. На рис. 6.6 показан профиль зуба конической прямозубой шестерни. Поскольку толщина зуба в зацеплении изменяется, если коническая шестерня перемещается в осевом направлении, это позволяет регулировать люфт.Регулировка шайб — это простой и легкий способ перемещения конической шестерни в осевом направлении.
В отличие от конических зубчатых колес, перемещение конического зубчатого колеса в осевом направлении не требует изменения контакта зубьев, и это является преимуществом конических зубчатых колес.
Рис. 6.6 Профиль зуба конической цилиндрической зубчатой передачи
(e) Дуплексная пара червячной передачи
Червячная передача с дуплексным выводом различается по модулю между правой и левой поверхностью зуба.Хотя шаг правой и левой поверхности зуба также различается, толщина зуба постоянно меняется. При смещении червяка в осевом направлении толщина зуба в рабочей точке изменяется и может использоваться для регулировки люфта червячных шестерен с дуплексным выводом. Есть несколько способов отрегулировать червяк в осевом направлении. Самый простой и безопасный способ — регулировка регулировочных шайб, как и любой другой тип шестерен. Отсутствие люфта неблагоприятно, так как зацепление червячной передачи требует определенного люфта, чтобы избежать истощения смазки на поверхности зуба.
На рис. 6.7 представлена основная концепция червячной пары с дуплексными выводами. (Подробнее см. Стр. 418)
Рис. 6.7 Базовая концепция дуплексной ведущей червячной передачи
(3) Шестерни с нулевым люфтом
Этот тип шестерни имеет конструкцию, которая может принудительно устранить люфт под действием внешней силы. Хотя эта конструкция включает в себя двойное боковое зацепление, за ней следует тщательно ухаживать, чтобы избежать истощения смазки.Эта конструкция не подходит для зубчатых колес, которые имеют большое проскальзывание на поверхности зуба при передаче мощности, таких как червячные или винтовые передачи. Если на поверхности зуба истощается смазка, вызывая большое скольжение, возникает опасность истирания.
Ножничный механизм с нулевым кольцевым люфтом
Путем приложения силы пружины к плотно зажатым зубьям сопряженной шестерни, когда шестерня разделена на две части, люфт устраняется.На рисунке 6.8 показана структура.
Рис. 6.8 Ножничный механизм (со спиральными пружинами)
Новые модели и методы идентификации люфта и люфта шестерни
- Маттиас Нордин
- Пер Боден
- Пер-Улоф Гутман
Глава
- 13 Цитаты
- 412 Загрузки
Abstract
Люфт — это наиболее важная нелинейность, которая ограничивает производительность управления скоростью в промышленных приводах, а также является важным препятствием для управления положением.
Простая модель, основанная на анализе фазовой плоскости, получена для упругого вала с внутренним демпфированием, соединенного с элементом люфта. Модель дополнена корпусом упругой муфты, частично заполненной резиной. Измерения сравниваются с моделированием и обнаруживаются очень хорошо согласующиеся.
Классическая модель мертвой зоны с внутренним демпфированием предсказывает нефизическое поведение динамики, что исправлено в новой модели.
В большинстве промышленных систем люфт возникает в замкнутом контуре, без прямого доступа к измерениям входного или выходного люфта.Обычно имеется доступ только к измерениям скорости двигателя. Чтобы разработать эффективный контроллер для систем механического привода, включая люфт, полезно иметь хорошую оценку люфта.
Представлен метод определения люфта в упругих двухмассовых системах с регулируемой скоростью вращения и люфтом. Идея состоит в том, чтобы ввести тот же синусоидальный сигнал, что и крутящий момент двигателя, в механическую установку и в имитационную модель. Путем адаптации зазора модели до совпадения измеренной и смоделированной амплитуд скорости двигателя, получается оценка величины зазора зазора.Описание функции анализа используется для выбора частоты и амплитуды входного крутящего момента двигателя. Этот метод быстр, имеет высокую точность и требует только измерения скорости двигателя.
Ключевые слова
Мертвая зона в фазовой плоскости Скорость двигателя Анализ в фазовой плоскости Передаваемый крутящий моментЭти ключевые слова были добавлены машиной, а не авторами. Это экспериментальный процесс, и ключевые слова могут обновляться по мере улучшения алгоритма обучения.
Это предварительный просмотр содержимого подписки,
войдите в, чтобы проверить доступ.
Предварительный просмотр
Невозможно отобразить предварительный просмотр. Скачать превью PDF.
Список литературы
1.
K.J. Астрем и Б. Виттенмарк.
Адаптивное управление. Addison-Wesley, Reading, Massachusetts, 1989.
zbMATHGoogle Scholar2.
Р. Бонех и О. Янив. Уменьшение амплитуды предельного цикла при наличии люфта.
J. of Dynamic Systems, Measurement and Control, 121 (2): 278–284, 1999.
CrossRefGoogle Scholar3.
G. Brandenburg. Устойчивость упругой двухмассовой системы с регулируемой скоростью с люфтом и кулоновским трением и оптимизация наблюдателем нагрузки. В
Симпозиум : Моделирование и симуляция для управления системами с сосредоточенными и распределенными параметрами, страницы 107–113, Лилль, 1986. IMACS-IFACS.
Google Scholar4.
G. Brandenburg, H. Hertle, and K. Zeiselmair. Динамическое воздействие и частичная компенсация кулоновского трения в упругих двухмассовых системах с регулируемой скоростью и положением.В
Всемирный конгресс IFAC, Мюнхен, 1987.
Google Scholar5.
Г. Бранденбург и У. Шефер. Влияние и частичная компенсация люфта для упругой двухмассовой системы с позиционным управлением. В
Proc. Европейская конф. по силовой электронике и приложениям, страницы 1041–1047, Гренобль, сентябрь 1987 г. EPE.
Google Scholar6.
Г. Бранденбург и У. Шефер. Влияние и адаптивная компенсация одновременно действующих люфта и кулоновского трения в упругих двухмассовых системах роботов и станков.В
Proc. ICCON ‘89, страницы WA-4–5, Иерусалим, 1989. IEEE.
Google Scholar7.
Г. Бранденбург, Х. Унгер и А. Вагенпфейл. Задачи устойчивости скоростного привода в упругой системе с люфтом и корректирующие меры с помощью наблюдателя нагрузки. В
Proc. Международная конференция по электрическим машинам, страницы 523–527, Мюнхен, сентябрь 1986 г. Технический университет Мюнхена.
Google Scholar8.
Х. Честнат и Р. В. Майер.
Сервомеханизмы и проектирование систем регулирования, страницы 251–257, 301–321. John Wiley & sons, 1955.
zbMATHGoogle Scholar9.
Гибкая муфта № 2245 5268–7 с резиновым элементом № 2245 5195–4. Benzlers AB, Box 922, S-251 09 Helsingborg, Швеция.
Google Scholar10.
Р. Л. Косгриф.
Нелинейные системы управления, страницы 121–123,193–194.McGrawHill, Reading, Massachusetts, 1958.
zbMATHGoogle Scholar11.
E. A. Freeman. Влияние трения и люфта, зависящих от скорости, на устойчивость систем автоматического управления.
Транзакция американского IEE, 7: 680–690, 1959.
Google Scholar12.
A. Gelb and W.E. Вандер Вельде.
Описание функций с несколькими входами и проектирование нелинейных систем. McGraw-Hill, 1968.
zbMATHGoogle Scholar13.
Дж. Х. Ливерсидж.
Люфт и устойчивость в замкнутом контуре систем автоматического управления. Academic Press, 1952.
Google Scholar14.
М. Нордин. Неопределенные системы с люфтом: анализ, идентификация и синтез. Лицензионная диссертация, trita / mat-95-os3, Королевский технологический институт, 1995.
Google Scholar15.
М. Нордин, Я. Галич и П.О. Гутман. Новые модели люфта и люфта.
Внутр. J. of Adaptive Control and Signal Processing, 1: 9–63, 1997.
Google Scholar16.
M. Nordin and P.-O. Гутман. Прочная линейная конструкция неопределенной двухмассовой системы с люфтом. В
Proc. 1-го семинара МФБ по автомобильному контролю, страницы 183–188, Аскона, Швейцария, 1995. IFAC.
Google Scholar17.
С. Олдак, К. Барил и П. О. Гутман. Количественный дизайн класса нелинейных систем с неопределенностью параметров.
Внутр. J. of Robust and Nonlinear Control, 4: 101–117, 1994.
MathSciNetzbMATHCrossRefGoogle Scholar18.
С. Олдак и П. О. Гутман. Автоколебательная адаптивная конструкция системы с сухим трением и значительной параметрической неопределенностью.
Внутр. J. of Adaptive Control and Signal Processing, 9: 239–253, 1995.
zbMATHCrossRefGoogle Scholar19.
J. Peschon.
Дисциплины и методы управления системами.Blanisdell, New York, 1965.
Google Scholar20.
Г. Тао и П. Кокотович. Адаптивное управление системами с люфтом.
Automatica, 29 (2): 323–335, 1993.
MathSciNetzbMATHCrossRefGoogle Scholar21.
Г. Тао и П. В. Кокотович. Адаптивное управление системами с неизвестным выходным люфтом. В
Proc. из 32-го CDC, страницы 2635–2640, Сан-Антонио, Техас, США, 1993. IEEE.
Google Scholar22.
Г. Тао и П. В. Кокотович.
Адаптивное управление системами с исполнительными и сенсорными нелинейностями. John Wiley & sons, 1996.
zbMATHGoogle Scholar23.
А. Тастин. Влияние люфта и трения, зависящего от скорости, на устойчивость систем управления с замкнутым циклом.
J. IEE, 94 (IIA): 143–151, 1947.
Google Scholar
Информация об авторских правах
© Springer-Verlag London 2001
Авторы и филиалы
- Маттиас Нордин
- 32 Пер
- Пер-Улоф Гутман
- 1.Подразделение металлургической и горнодобывающей промышленности ABB Automation Systems ABVästerås, Швеция,
- 2. Подразделение космических систем, Шведская космическая корпорация, Солна, Швеция, ,
- , 3. Факультет сельскохозяйственной инженерии, Технион, Израильский технологический институт, Хайфа, Израиль, ,
, издатель Control Publishers отказывается финансировать бюджет, несмотря на обновление
Eurogamenet на . Компания Games обратилась к негативной реакции на политику обновлений Control в новом поколении в новом заявлении, которое соответствует его предыдущему объявлению.Разработчик Control Remedy подвергся критике, когда он появился: вы не получите бесплатное обновление до версий игры для PlayStation 5 и Xbox Series X, даже если у вас уже есть основная игра и ее расширения.
Новая версия пакета Control «Ultimate Edition» будет выпущена для ПК через Steam 27 августа, а затем в Epic Games Store, PlayStation 4 и Xbox One 10 сентября.
Эта новая версия игры понадобится вам, чтобы получить бесплатное обновление до Ultimate Edition, когда она выйдет на PS5 и Xbox Series X несколько месяцев спустя.
Ultimate Edition включает Control и два его расширения. Вот и все.
Это объявление вызвало негативную реакцию владельцев Control, которые указали, что другие издатели предлагают бесплатные обновления следующего поколения без проблем.
Теперь вмешалась компания 505 Games, настаивая на том, чтобы изучить все возможности, прежде чем принять решение.
«Мы потратили несколько месяцев на изучение всех наших вариантов запуска Control Ultimate Edition, и ни одно решение не было принято легкомысленно», — говорится в сообщении 505 на веб-сайте Control.
«Хотя довести любую игру до платформ следующего поколения сложно, мы быстро поняли, что еще сложнее обновить нашу текущую пользовательскую базу до следующего поколения с полным паритетом между платформами с нашей игрой годичной давности.
«Каждый путь, который мы преследовали, был в той или иной форме, и эти блокираторы означали, что по крайней мере одна группа игроков по разным причинам не участвовала в обновлении. На сегодняшний день мы не можем предложить обновление для всех. , и исключение какой-либо одной группы кажется несправедливым. Мы понимаем, что это не то, что вы хотите слышать «.
По сути, 505 не меняет свою политику в этом отношении, что означает, что единственной версией Control, доступной на PS5 и Xbox Series X, будет Control Ultimate Edition.Исходная базовая игра, пакеты расширения и сезонный абонемент не будут продаваться отдельно на PlayStation 5 или Xbox Series X.
505 баллов, если у вас есть базовая игра Control, пакеты расширения или сезонный абонемент на PlayStation 4 или Xbox One. вы можете играть в Control на PS5 и Xbox Series X благодаря обратной совместимости. Это даст вам «улучшенный опыт», сказал 505, но не прояснил, что именно это означает.
Возникает вопрос: в чем разница между базовой игрой Control плюс сезонный абонемент и этим новым Control Ultimate Edition? На первый взгляд разницы нет.Но 505 ответил на этот вопрос:
«Целью Control Ultimate Edition было не выпускать новый эксклюзивный контент на платформах следующего поколения, а предложить полный игровой процесс Control новым игрокам Control в едином, легком для поиска месте. Продукт. Версии Control для PlayStation 5 / Xbox Series X содержат тот же контент, что и игры текущего поколения, хотя они в полной мере используют возможности и функции, предоставляемые этими новыми консолями.
«Путь обновления, который мы предлагаем возможно только при обновлении с той же версии игры.Поскольку мы занимаемся дополнительной разработкой Control Ultimate Edition только на платформах следующего поколения, мы, к сожалению, не можем предложить способ обновления для всех существующих игроков Control. Мы понимаем, как это может расстроить некоторых игроков, но вы все равно сможете играть в Control 2019 года и каждое расширение на новых платформах ».
505 завершил свое заявление извинениями, признав, что некоторые останутся расстроенными.
«Чтобы реализовать Control на консолях следующего поколения в любой форме, нам пришлось принять несколько трудных решений, и они пришли в виде создания упрощенного плана продукта Control Ultimate Edition, который у нас есть сегодня.
«То, что нам потребовалось время, чтобы ответить, не означает, что мы не слушали. Мы сожалеем, что не смогли оправдать все ожидания, и мы надеемся, что вы продолжите поддерживать Control. Мы благодарим вас за вашу поддержку».
Стабилизация и управление механическими системами с люфтом: глава книги по науке и технике
Аннотация
Люфт — это одно из нескольких нарушений целостности, обнаруживаемых в различных типах систем; его можно найти в приводах различных типов, таких как механические и гидравлические, что приводит к нежелательным эффектам в поведении системы.В этой главе рассматриваются три различных подхода к управлению для стабилизации механических систем, в которых это явление присутствует в исполнительных механизмах системы. Во-первых, при обнаружении люфта в исполнительных механизмах применяется независимый совместный подход к управлению; затем разрабатывается схема управления формированием контура PI, реализующая описывающую функцию для поиска колебаний предельного цикла и соответствующего усиления управления. Наконец, оптимальный регулятор для механических систем с люфтом выводится, получая оптимальный закон управления и частоту колебаний, когда эта нелинейность обнаруживается, реализуя функцию описания для моделирования эффектов люфта.Наверх1. Введение
Люфт — это явление, обнаруживаемое в различных типах приводов, таких как механические и гидравлические, обычно это происходит, когда контакт двух сопряженных шестерен не совпадает, и это уступает место множеству нежелательных эффектов, вызывающих проблемы для всей механики. система. Таким образом, некоторые авторы предложили несколько решений относительно проблем управления и устойчивости этих систем с входными нелинейностями; Принимая во внимание, что это нетривиальная задача из-за сложности модели, традиционные стратегии управления в большинстве случаев терпят неудачу, и поэтому необходимо разработать нелинейные стратегии управления или реализовать модифицированные традиционные стратегии.Цель этой главы книги — объяснить различные стратегии управления системами с такой нелинейностью. Цель состоит в том, чтобы показать некоторые методы нелинейного управления, которые были разработаны, и предложить различные подходы к решению этой проблемы.
Ключевые термины в этой главе
Независимое совместное управление: подход к управлению, применяемый для стабилизации и управления робототехникой и другими механическими системами, в котором управление каждым суставом разрабатывается независимо.
Механические системы: Вид системы, которая состоит или может быть представлена рядом механических частей.
Управление несколькими переменными: Стратегия управления системами с несколькими переменными, обычно представленная моделью пространства состояний.
Робототехника: область науки, которая занимается информатикой, машиностроением, электротехникой и промышленным инжинирингом для разработки и проектирования механизмов для замены операторов или людей во многих промышленных и других опасных операциях.
H8: Управление: метод управления, заключающийся в получении контроллера, минимизирующего норму H 8 системы.