Оклейка авто виниловой пленкой 🚗 в Москве: смена цвета машины
Мы предлагаем доступный и эффективный метод защиты и преображения автомобиля — оклейку кузова виниловой пленкой. Пленка позволяет не только сменить цвет автомобиля или защитить его поверхность, но и выделиться из общего потока, если использовать дизайнерские решения.
СОВЕТ! Виниловую пленку покройте керамикой. Это продлит срок службы пленки, придаст ей дополнительные защитные свойства. Керамика обладает мощным гидрофобным эффектом. Дает невероятный блеск, или наоборот усиливает матовый эффект.
Преимущества оклейки автомобиля винилом, вместо покраски
- Стоимость — от 20 000 ₽ за комплексную услугу, в зависимости от выбранной пленки.
- Возможность нанесения винила любого цвета, оттенка и текстуры, вплоть до карбона. В ассортименте более 300 видов цветной пленки.
- Вся процедура занимает от 1 до 3 дней — нет необходимости полной разборки ТС.

- Дополнительные защитные свойства материала уберегают от царапин, камней, пыли
- Высокая стойкость винила к перепадам температур и погодным условиям
- Защита родного лакокрасочного слоя
- Оперативная замена испорченной пленки на любом участке кузова, легкий подбор нужного тона
- Возможность замаскировать дефекты кузова
- Легкий демонтаж винила без последствий для ЛКП
Подготовка поверхности и процедура оклеивания
При затягивании автомобиля пленкой мы придерживаемся определенного алгоритма. Работа начинается с демонтажа навесного оборудования (фары, дверные ручки, антенны, замки, молдинги, спойлеры, пластиковые накладки). Кузов очищается от грязи и пыли в 4 этапа:
- тщательная мойка поверхности;
- удаление жирных пятен и следов смазки с помощью изопропилового спирта;
- обработка автомобиля моющим средством;
- повторная чистка изопропиловым спиртом в местах подворота винила (выштамповки, фальш-панели).

Пленка наносится одним из двух способов: «мокрым» или «сухим». Метод поклейки зависит от технических характеристик пленки и инструкции производителя.
Как проходит оклейка автомобиля виниловой пленкой:
- предварительная примерка и подрезка материала;
- оклеивание строго от центра к краям с применением строительного фена;
- обработка поверхности ракелем для удаления мелких пузырей воздуха;
- прогрев поверхности для активации клеящегося слоя материала;
- финальная подрезка с запасом на подворот;
- финишная обработка и притирка от пятен;
- монтаж ранее снятых деталей на свои места (они также оклеиваются в цвет кузова по вашему желанию).
Что еще нужно знать
Чтобы записаться на оклейку лучше оформить заявку заранее. Как правило график оклейки у нас расписан на 3 дня вперед. Но иногда клиенты переносят время и освобождаются места. В таких случаях можем взять автомобиль для оклейки в день обращения.
В таких случаях можем взять автомобиль для оклейки в день обращения.
Сроки выполнения работ варьируются от 1 до 7 дней в зависимости от выбора пленки, типа автомобиля и конструкции кузова. Стоимость рассчитывается индивидуально для каждого клиента.
Мы предлагаем материал от ведущих компаний в сфере производства винила:
- ORACAL 970 Premium (Германия)
- TeckWrap (Америка)
- KPMF (Англия)
- Hexis (Франция)
- Авери (Avery)
Цены на виниловую оклейку пленкой TeckWrap
TeckWrap – американская компания специализирующаяся на производстве автомобильных пленок. В данный момент мы предлагаем более 250 цветов глянцевых и матовых оттенков. Производителя «Текврап» можно охарактеризовать цена/качество.
Производителя «Текврап» можно охарактеризовать цена/качество.Срок службы данной пленки 3 – 5 лет.
Толщина 120 микрон.
Время оклейки 2 – 3 дня.
|
Классификация авто |
Глянцевая, матовая (обычная) |
Глянцевая, матовая (хром, металик) |
Зеркальный хром, перламутр |
|---|---|---|---|
| Седаны C класс | от 40 000 ₽ | от 50 000 ₽ | от 70 000 ₽ |
| Седаны E класс | от 50 000 ₽ | от 60 000 ₽ | от 80 000 ₽ |
| Внедорожники и S класс | от 65 000 ₽ | от 75 000 ₽ | от 85 000 ₽ |
Цены на виниловую оклейку пленкой KPMF
KPMF – английская компания специализирующая на производстве высококачественных автомобильных пленок. Компания очень хорошо зарекомендовала себя на рынке автомобильных пленок и имеет лидирующие позиции. Пленки компании КПМФ имеют широкую палитру цветов и долговечность использования.
Компания очень хорошо зарекомендовала себя на рынке автомобильных пленок и имеет лидирующие позиции. Пленки компании КПМФ имеют широкую палитру цветов и долговечность использования.
Срок службы данной пленки 5 – 7 лет.
Толщина 80 – 100 мкрн.
Время оклейки 2 – 4 дня
|
Классификация авто |
Глянцевая, матовая (обычная) |
Глянцевая, матовая (хром, металик) |
Зеркальный хром, перламутр |
|---|---|---|---|
| Седаны C класс | от 50 000 ₽ | от 65 000 ₽ | от 85 000 ₽ |
| Седаны E класс | от 60 000 ₽ | от 75 000 ₽ | от 95 000 ₽ |
| Внедорожники и S класс | от 75 000 ₽ | от 100 000 ₽ |
Цены на цветную оклейку пленкой ORACAL 970 Premium
ORACAL 970 – марка автомобильной пленки премиум класса, от фирмы Orafol. Завод стоит в Германии. Данная пленка имеет высокие характеристики и умеренную стоимость по сравнению со своими собратьями. Пленка Оракал литая и не имеет усадки на протяжении всего срока эксплуатации.
Завод стоит в Германии. Данная пленка имеет высокие характеристики и умеренную стоимость по сравнению со своими собратьями. Пленка Оракал литая и не имеет усадки на протяжении всего срока эксплуатации.
Срок службы 6 лет.
Толщина 110 микрон.
Время оклейки 2 – 3 дня
|
Классификация авто |
Глянцевая, матовая (обычная) |
Глянцевая, матовая (хром, металик) |
Зеркальный хром, перламутр |
|---|---|---|---|
| Седаны C класс | от 45 000 ₽ | от 55 000 ₽ | от 75 000 ₽ |
| Седаны E класс | от 55 000 ₽ | от 70 000 ₽ | от 85 000 ₽ |
| Внедорожники и S класс | от 65 000 ₽ | от 85 000 ₽ | от 90 000 ₽ |
Сопутствующие услуги нашего детейлинг-центра:
Модельный ряд автомобилей Hyundai 2020 года
Модельный ряд Hyundai 2020 года охватывает все востребованные на российском рынке
типы автомобилей. Каждая модель имеет свои отличительные технические особенности
комплектаций, рассчитана на покупателя с определенными предпочтениями, стилем жизни, уровнем дохода и продается
в соответствующем ценовом диапазоне.
Каждая модель имеет свои отличительные технические особенности
комплектаций, рассчитана на покупателя с определенными предпочтениями, стилем жизни, уровнем дохода и продается
в соответствующем ценовом диапазоне.
Седаны
Новая Hyundai Sonata VIII поколения — Ее преимущества — большая жесткость кузова и сниженный вес, улучшенные характеристики безопасности, топливной экономичности и динамики. Оснащается рядом передовых технологий комфорта и активной безопасности.
Новый Hyundai Solaris-II 2020 модельного года — лидер продаж южнокорейского автконцерна Хендай задает новые стандарты в качестве эксплуатационных характеристик бюджетного седана и устанавливает опции комфорта класса «С» на базовую версию!
Новая Hyundai Elantra 2020 — обновленный семейный седан шестого поколения с преимальным оснащением и высококлассной отделкой салона. Новый более мощный двигатель, яркий дизайн и увеличенные габаритные размеры.
Новый более мощный двигатель, яркий дизайн и увеличенные габаритные размеры.
Архив моделей
Hyundai Sonata — седан среднего класса с повышенным классом комфорта, отличной управляемости на дорогое и полным набором электронных помощников водителю.
Hyundai Grand Santa Fe — огромный и вместительный внедорожник. Автомобиль для тех, кому нужны роскошь премиального полноприводника и три ряда сидений одновременно.
Hyundai Tucson 2017 года всем видом показывает свою мощь и готовность покорять дороги. Корейский кроссовер второго поколение, не смотря на габариты, достаточно маневренный. Отлично подойдет для городских узких дорог и парковок. А своим современным дизайном в стиле «струящихся линий» он явно выделится из толпы однообразных серых кроссоверов.
Hyundai Santa Fe Premium пришла на смену обычному Санта Фе.
Hyundai H-1 специализируется на перевозке пассажиров и малогабаритных грузов с комфортом. Автомобиль справляется с задачей на отлично: большой салон, три ряда сидений, высокая функциональность.
Hyundai Genesis — большой, комфортный, стильный, представительский. Все эти хвалебные эпитеты в адрес автомобиля не зря: Genesis выглядит строго и солидно. Об этом говорит и его современная техническая начинка.
Строгий Hyundai i40 седан представляет бизнес-класс корейской марки. I40 стоит наравне со своими западными и американским конкурентами. Строгие линии, комфорт и современные технологии. Автомобиль сочетает в себе скорости и динамику вкупе с экономичностью и практичностью.
Hyundai i40 универсал выглядит динамичнее и спортивнее строго седана. Безопасный и в то же время динамичный универсал подходит и для рабочих встреч, и для семейного загородного отдыха. Остаться наедине с водителем и показать себя на дороге для i40 не проблема.
Безопасный и в то же время динамичный универсал подходит и для рабочих встреч, и для семейного загородного отдыха. Остаться наедине с водителем и показать себя на дороге для i40 не проблема.
Hyundai Solaris седан — настоящий хит и одна из самых успешных моделей. Компактный седан для ежедневных поездок по городу подойдет как для небольшой семьи, так и для деловых людей. Предложение по продаже автомобиля первого поколения ограничено! Спешите приобрести проверенный седан по специальным ценам!
Hyundai Solaris хэтчбэк — первое поколение модели в кузове хэтчбек. Компактный, маневреный, недорогой бюджетный автомобиль продавался на рынке до начала 2017 года.
Hyundai Equus — флагманский, люксовый седан производился и успешно продавался до 2016 года, пока компания Hyundai не создала отдельный премиальный суббренд Genesis, где новый пилотный проект G90 пришел на смену Equus.
Hyundai Elantra — четырехдверный седан пятого поколения с завораживающими линиями. Автомобиль всем своим видом показывает породу и принадлежность к классу modern Premium.
Hyundai Santa Fe — дорестайлинговая версия модели с долгой историей и хорошей репутацией среди автолюбителей. Данный кроссовер является эталоном надежности марки. При своих размерах Santa Fe элегантно совмещает спортивные черты и практичность. На смена ему пришла модель Санта Фе Премиум
Hyundai ix35 — современный городской кроссовер. Плавные линии кузова создают спокойный дизайн. При необходимости, ix35 может проявить себя как на асфальте, так и на пересеченной местности. Премиальность авто прослеживается не только во внешности: техническое оснащение и качественная сборка не последние преимущества по сравнению с конкурентами.Эту модель сменил Туссан второго поколения.
Hyundai Veloster выделяется на фоне всего модельного ряда неординарной внешностью. Его выберут любители выделяться из толпы и ловить восхищенные взгляды прохожих и автомобилистов.
Hyundai i30 универсал для тех, кому i30 в кузове хэтчбек оказался мал. Подходит для семейных пар и совместных поездок. В то же время универсал не прочь проявить свой характер на дороге. Бензиновый двигатель разгоняет автомобиль до 100 км/час за 10,8 секунд.
Hyundai i30 3DR — трехдверный хэтчбэк со спортивным дизайном. Ай-30 технологичный и мощный, чем и привлекает молодых современных людей, ценящих высокую скорость передвижения в мегаполисе и не особо заботящихся о социальном престиже.
Hyundai i30 хэтчбек на 5 дверей сочетает в себе агрессивный дизайн, максимальную безопасность и устойчивое поведение на дороге. Выбор хэтчбэка i30 —
выбор целеустремленных людей.
Выбор хэтчбэка i30 —
выбор целеустремленных людей.
Конструкция транспортного средства: рама, кузов, шасси
Продолжим детализированно рассматривать устройство, конструкцию автомобиля. Остановимся на том, что из себя представляют рама, кузов и шасси транспортного средства. Сфокусируемся на их основном назначении.
- Рама – несущая структура. Это основание для иных частей транспортного средства. Его каркас. На каркас крепятся двигатель, подвеска, агрегаты трансмиссии (механизмы, служащие для передачи движения) и другие компоненты автомобиля. Изначально рама была у всех автомобилей. Теперь – только у тех, где нет несущего кузова. Это грузовые автомобили, большинство внедорожников. Рамы могут быть хребтовыми (несущие части – трубы) или состоящими из лонжеронов (их производят из швеллеров — металлоизделий, образующих в поперечном сечении букву «П»). Хребтовые рамы более жёсткие, особенно впечатляет жёсткость рамы на скручивание.
 На базе хребтовой рамы легко создать авто с разным количеством ведущих мостов. Но лонжеронные рамы современные производители используют чаще. Ведь механизмы в случае использования хребтовой рамы приходится устанавливать внутри её, и, если у машины случится поломка, ремонт получается очень сложным.
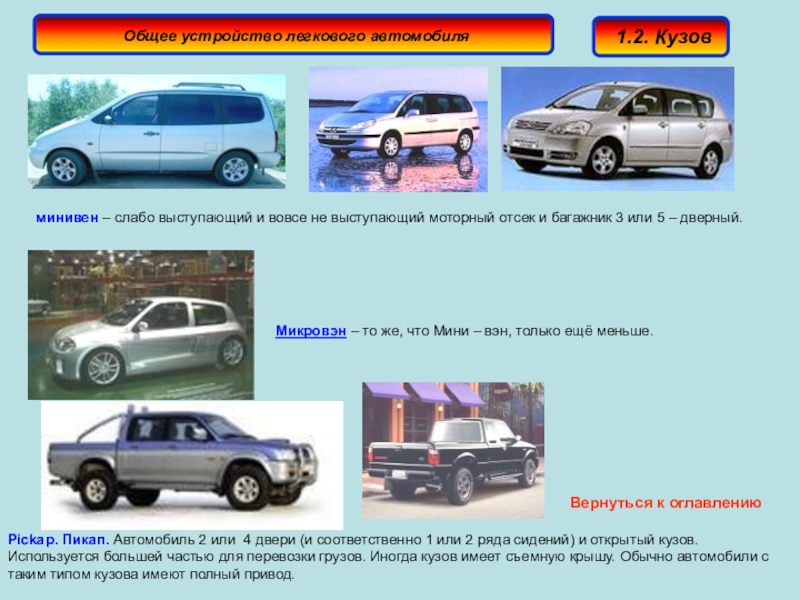
На базе хребтовой рамы легко создать авто с разным количеством ведущих мостов. Но лонжеронные рамы современные производители используют чаще. Ведь механизмы в случае использования хребтовой рамы приходится устанавливать внутри её, и, если у машины случится поломка, ремонт получается очень сложным. - Кузов – обрамление автомобиля. Является конструктивной частью. Может крепиться непосредственно к раме или представлять собой самостоятельную несущую систему (у моделей, где не установлена рама – преимущественно, легковых автомобилей). Изготавливается из металла (например, листовой стали, алюминия), углеволокна, пластика, стекловолокна. Предназначается для размещения водителя, пассажиров и груза. В кузов входят ряд составляющих: капот, крылья, подножки. Количество и виды компонентов зависят от того, к какому транспортному средству принадлежит кузов. Например, у коммерческого (грузового) транспорта кузов может быть представлен «формулой» кабина + платформа/цистерна/фургон + крылья, капот, подножки, а кузов легкового транспорта чаще представлен основанием, крышей, боковыми, передней и задней панелями (боковиной, передней и задней частью).
 Для защиты от коррозии и придания эстетичного внешнего вида кузов автомобиля окрашивается.
Для защиты от коррозии и придания эстетичного внешнего вида кузов автомобиля окрашивается. - Шасси – совокупность узлов ходовой части, механизмов управления и трансмиссии. Таким образом за шасси стоят все агрегаты и узлы, которые нужны для управления движения транспортного средства. Именно агрегаты, узлы шасси обеспечивают транспортному средству передачу движущей силы. Именно от шасси зависят такие качества как, например, маневренность, грузоподъёмность транспортного средства.
Кузовные и рамные шасси
Если речь идёт о шасси на раме, это законченная конструкция, которую можно передвигать на собственных колёсах или гусеницах. Рамные шасси устанавливают на грузовые автомобили, трактора. При этом на шасси транспортных средств, предназначенных для передвижения в условиях бездорожья, могут устанавливать средства повышения проходимости.
Если же речь идёт о шасси транспортного средства с несущим кузовом, то мы имеем дело с основанием транспортного средства. Именно оно является связующим звеном между агрегатами ходовой части, механизмами управления.
Именно оно является связующим звеном между агрегатами ходовой части, механизмами управления.
Один из популярных конструктивных вариантов полно-рамная система «кузов над рамой». Это жёсткая конструкция из стержней из стали. Для крепежа автомеханиками используются болты. Такая конструкция особенно подходит для джипов, микроавтобусов.
Шасси же с несущим кузовом (соединение выполнено методом сварки) чаще можно встретить у малых и средних легковых автомобилей. Многие кузовную конструкцию такого типа называют унифицированной, блочной.
По сравнению с рамной кузовная конструкция имеет существенно меньший вес. Благодаря этому у кузовного транспорта – лучшая топливная экономичность.
Рисунок наглядно демонстрирует, что у кузовного транспорта нет отдельной рамы. Несущий кузов транспортного средства сформирован панелями.
A – Кузовная конструкция со съемным шасси.
B – Компоненты шасси. Характерная компоновка для автомобилей Mazda, SAAB. Крепление компонентов к металлическим частям кузовной конструкции выполнено через усиленные поперечные элементы.
Характерная компоновка для автомобилей Mazda, SAAB. Крепление компонентов к металлическим частям кузовной конструкции выполнено через усиленные поперечные элементы.
Важно также быть знакомым с понятием «самоходное шасси». В этом случае речь идёт не о составной части, а самостоятельном моторизированном транспортном средстве. На самоходное шасси ставится дополнительное оборудование, орудия, приспособления (сварочный аппарат, навесной комбайн, снегоуборочную машину, погрузчик, подъёмник, автокран). Самоходное шасси активно задействуется в коммунальном, сельском и лесном хозяйстве, а также на складах.
Снаряженная масса шасси
Очень часто можно встретиться с понятиями «снаряженная масса шасси», снаряжённая масса автомобиля». Что же это такое?
Снаряжённая масса авто – это суммарная масса автомобиля со всеми эксплуатационными материалами (полным баком бензина, охлаждающей жидкостью, маслом). Масса водителя и пассажиров при этом в расчёт не берётся. Их масса учитывается, если речь идёт о полной массе транспортного средства.
Их масса учитывается, если речь идёт о полной массе транспортного средства.
Снаряженная масса у каждого вида автомобиля различна:
- Пикапы и внедорожники. Вес достигает 2,5 т.
- Полноразмерные автомобили, минивены. Вес – около двух тонн.
- Компактные автомобили. Снаряжённая масса – не более 1360 кг.
- Микрокары, микроавтомобили. Снаряжённая масса – около тонны.
Очень часто снаряжённую массу транспортного средства в характеристиках указывают именно в качестве снаряжённой массы шасси. Как правило, производитель пишет «Полная масса транспортного средства» и «Снаряженная масса шасси», иногда же он указывает «Полная масса транспортного средства» и «Снаряжённая масса транспортного средства».
Распределение веса по осям
За то, какой вес автомобиля приходится на колеса передней и задней оси, отвечает характеристика «распределение веса по осям» («распределение нагрузки шасси»).
Эта характеристика напрямую связана с показателями топливной экономичности и способности транспортного средства поворачиваться. Именно от распределения веса по осям зависит способность транспортного средства маневрировать – поворачивать на заданный угол и сохранять устойчивость.
Идеальный вариант для спортивных автомобилей – это распределение веса – 50/50 (одинаково – не переднюю и заднюю ось).
У переднеприводных автомобилей распределение веса по осям – 70/30 (70% нагрузки на переднюю и 30% на заднюю ось). Это важно для оптимизации тягового усилия на ведущие колеса.
Габаритные размеры транспортных средств
Важными характеристиками любого транспортного средства (ТС) являются габаритные размеры. Это длина, ширина, высота, грузоподъёмность, объём кузова.
Чтобы правильно определять габариты, важно чётко ориентироваться в терминологии и уметь корректно производить расчёт расстояния.
Колесная база – расстояние от центральной линии передних колес до центральной линии задних колес. Стандарт для маломерных, компактных авто равен 254 мм (100 дюймов), у полноразмерных авто, пикапов – 381 см.
- Ширина колеи – расстояние между линиями двух колес одной оси. Стандартная ширина колеи для передней оси – 157 см для задней оси -163 см. Чем шире ширина колеи, тем выше способность успешного преодоления на высоких скоростях крутых поворотов (при низкой ширине колеи есть риски опрокидывания транспортного средства).
- Ширина ТС (транспортного средства) – наибольшее расстояние между максимально удаленными частями кузова, находящимися справа и слева него. Измерения проводятся перпендикулярно центральной линии транспортного средства.
- Длина ТС – расстояние от наиболее выразительно выступающей точки на заднем бампере до такой же точки на переднем бампере.
-
Высота ТС – высота от дороги до крыши транспортного средства (самой высокой его части).

По габаритам автомобили делятся на несколько групп:
Полноразмерный автомобиль. Рассчитан на перевозку 4-х-5-ти взрослых людей. Большинство полноразмерных легковых авто – четырёхдверные, полноприводные или заднеприводные.
Автомобили среднего размера. Ориентированы на транспортировку 3-4-х человек. На машины этого типа установлены небольшие двигатели, за счет этого наблюдается существенная экономия топлива.
Компактные и мини-компактные автомобили. Большинство из них – переднеприводные. За счёт малого веса, и небольшого аэродинамического сопротивления именно у них отличная топливная экономичность.
Аэродинамические характеристики
Говоря о габаритах, мы уже затронули аэродинамические характеристики. Остановимся на них подробнее. Ведь именно аэродинамическое сопротивление – одна из ключевых проблем, с которой связаны и скорость, и экономия топлива.
Производители кузовов активно заинтересованы в создании таких конструкций, у которых наименее выражено лобовое сопротивление воздушному потоку.
Кузовопроизводители стремятся к минимизации площади фронтальной проекции кузова. Чем меньше высота и ширина кузова, фронтальная проекция, тем лучше аэродинамические характеристики транспортного средства.
Многое зависит и от формы кузова. Аэродинамические характеристики выше у автомобилей с обтекаемым кузовом, низкой посадкой.
Для оценки аэродинамических характеристик кузова используется коэффициент лобового сопротивления. Он показывает отношение силы сопротивления воздуха во время движения транспортного средства к отношению к силе сопротивления движению цилиндра (наибольшее поперечное сечение транспортного средства при этом должно быть равным поперечному сечению цилиндра). Cd = 0,26 – это отличный показатель. Именно такой коэффициент лобового сопротивления – у инновационных спорткаров. Для минивена, пикапа же хороший показатель – Cd = 0,40.
Для минивена, пикапа же хороший показатель – Cd = 0,40.
Классификация автомобилей
Классификация автомобилей осуществляется по нескольким критериям:
- Сегментам.
- Типу кузова.
В основе классификации по сегментам – габаритные размеры.
Существует две вариации классификации: на 6 и 8 сегментов. В первом варианте сегменты сформированы на основании размеров. Во второй классификации также учитывается вместимость, стоимость автомобиля.
Классификация с 6-ю сегментами:
-
A. Длина – до 3,6, ширина – до 1,6 м.
-
B. Длина – до 3,6…3, 9 и ширина 1,5…1,7 м.
-
C. Длина – до 3,9…4,4, ширина –1,6…1,75 м.
-
D. Длина – 4,4…4,8, ширина – 1,7…1,8 м.
-
E.
 Длина – более 4,8 и ширина более 1,7 м.
Длина – более 4,8 и ширина более 1,7 м.
-
F. Длина более 5,0 и ширина более 1,82 м.
Классификация с 8-ю сегментами:
- G. Первый спортивный.
- H. Второй спортивный (спортивные купе премиум-класса).
- J. Транспорт повышенной проходимости.
- S. Спорткары – купе, кабриолеты.
- SUV-1. Небольшие внедорожники.
- Сегмент SUV-2. Вместительные внедорожники.
- Сегмент M. Минивэны, универсалы повышенной вместимости.
- Сегмент MPV. Субкомпактные автомобили с кузовом минивэн.
Классификация по типам кузовов
Седан (Sedan). Легковые автомобили, в которых багажное отделение структурно отделено от пассажирского салона. В задней стенке нет дверцы. Чаще всего седаны – четырёхдверные, но встречаются также двухдверные (тудоры, пример — Chevrolet Monte Carlo) и пятидверные модели. В США седаны часто называют Saloon, в Хорватии – Limuzina. Большинство седанов – хардтопы. У них нет центральных стоек, а на боковых стёклах отсутствуют наружные рамки.
В США седаны часто называют Saloon, в Хорватии – Limuzina. Большинство седанов – хардтопы. У них нет центральных стоек, а на боковых стёклах отсутствуют наружные рамки.
Универсал (Family Cars) – это легковой автомобиль с прямой крышей. Легко узнаваем по закрытому двухобъёмному грузо-пассажирскому кузову. Задний свес у универсала – длиннее или такой же, как на седане.
Хэтчбек – авто с покатой крышей и укороченным свесом кузова. Длина такого кузова достаточно небольшая, поэтому хэтчбек пользуется популярностью в городских условиях. Автоматически решается вопрос с разворотом на узких улицах, во время парковки.
Купе – автомобили с «укороченной» базой. Чаще всего – с двумя дверьми, и двумя «полноценными» местами в первом ряду комфортности. Второй ряд сидений или отсутствует или ограничен по комфортности. Купе – распространённый вариант кузовов у спорткаров.
Кабриолет (Convertible) – легковой автомобиль со складной крышей. К кузову примыкают не стандартные опускающиеся, а съемные боковые окна.
К кузову примыкают не стандартные опускающиеся, а съемные боковые окна.
Внедорожники – это автомобили с несущим корпусом –на раме с полным приводом. Транспортные средства отличает высокий клиренс и пониженный ряд передач трансмиссии. Функцию ведущих выполняют передние и задние колёса.
Минивэны (Mini-Van) – семейные автомобили повышенной вместимости с высокой крышей, однообъёмным либо полуторообъёмным кузовом. В большинстве минивенов размещено три ряда кресел (чаще всего складные, съёмные). Характеризуются большой площадью остекления и хорошим обзором.
Информация, которая касается конструкции, устройства автомобиля, постоянно лавинообразно увеличивается. Мониторить информацию каждый день не вариант Тратится куча времени. Но представьте, что в вашем распоряжении есть библиотека, которая без ваших усилий и регулярно — практически каждый день — обновляется свежей информацией по автомобильным технологиям. И такая платформа есть, это cистема дистанционного обучения ELECTUDE. Экономить время и получать актуальную информацию по транспортным технологиям легко!
И такая платформа есть, это cистема дистанционного обучения ELECTUDE. Экономить время и получать актуальную информацию по транспортным технологиям легко!
Компания ILLSKILL — 8(495)798-88-42 — Оклейка авто плёнками, тонировка оптики и стёкол, покраска, кузовной ремонт, декорирование карбоном, слесарный ремонт, тюнинг выхлопных систем..
Начиная с момента открытия нашей компании, ежегодно мы открываем летний сезон участием на выставке Московское тюнинг шоу. Уже пять лет мы выставляем самые зрелищные, яркие автомобили. С каждым годом мы строим сложные и инновационные проекты, премьера которых — традиционно происходит именно на этой выставке. Мы рекомендуем всем нашим друзьям и клиентам посетить данное мероприятие. Тысячи автомобилей, лучшие работы от самых известных российских тюнинг ателье.
Компания ILLSKILL специализируется на кузовном и слесарном ремонте, покраске автомобилей и мото-техники, внешнем тюнинге и стайлинге экстерьера и интерьера автомобилей, техническом обслуживании автомобилей, разработке, тюнинге и установке выхлопных систем, подготовке автомобилей к участию в автоспортивных соревнованиях, разработке и производстве рекламной продукции, розничной и оптовой продаже товаров, а так же производстве одежды и аксессуаров собственного бренда. Собственное полиграфическое производство полного цикла обеспечивает качество и своевременное выполнение работ всех направлений автостайлинга. Наличие у компании служб доставки товаров и запасных частей, эвакуации / перевозки автомобилей позволит вам экономить время и деньги. Все работы проводятся про регламенту завода изготовителя. Автомобили и пилоты, выступающие под флагом ILLSKILL, занимают первые места на выставках и в профессиональном автоспорте в России и за рубежом.
Собственное полиграфическое производство полного цикла обеспечивает качество и своевременное выполнение работ всех направлений автостайлинга. Наличие у компании служб доставки товаров и запасных частей, эвакуации / перевозки автомобилей позволит вам экономить время и деньги. Все работы проводятся про регламенту завода изготовителя. Автомобили и пилоты, выступающие под флагом ILLSKILL, занимают первые места на выставках и в профессиональном автоспорте в России и за рубежом.
ILLSKILL является дилером мировых брендов на российском рынке, оставаясь на 100% российским бизнесом, развивая производство в России..
- 8(495) 798-88-42 Магазин, корпоративные клиенты, сотрудничество, дизайн, обучение, Техцентр. Запись за проведение работ.
С 2015 года мы запустили производство всемирно известных тормозных дисков для городских и спортивных автомобилей. Европейское качество и выгодная цена — отличительные качества вентилируемых тормозных дисков Rotinger Illskill. Все автомобили, представляющие нашу компанию на выставках и в автоспорте — укомплектованы именно этими тормозными дисками.
Все автомобили, представляющие нашу компанию на выставках и в автоспорте — укомплектованы именно этими тормозными дисками.
С 2012 года у нас была цель — создать линейку одежды высокого качества на каждый день. Так у нас появился цех по пошиву одежды под нашим брендом. Всю линейку одежды и аксессуаров можно приобрести в магазине в Москве или в интернет магазине с экспресс доставкой по Москве и России.
Собственное макетирование и производство выхлопных систем позволяет добиться желаемого результата. С 2014 года компания ILLSKILL стала дилером выхлопных систем Borla (USA), что позволило создавать эксклюзивные выпускные системы высокого качества. Компания ILLSKILL так же занимается ремонтом глушителей, сваркой, в том числе и аргоном. Тюнинг выхлопных систем нацелен на улучшение динамики разгона, а так же улучшение характеристик автомобиля — от снижения температуры подкапотного пространства до увеличения интенсивности выхлопа отработанных газов.
Мы предоставляем услуги по оклейке виниловой плёнкой городских и спортивных автомобилей. Качественная работа позволяет избежать переделок, экономя время водителя и пилота. Наша компания является лидером по данному направлению в России, мы продолжаем развивать стайлинг виниловыми плёнками благодаря печати на виниловых плёнках в сотрудничестве с производителями материала и оборудования.
Качественная работа позволяет избежать переделок, экономя время водителя и пилота. Наша компания является лидером по данному направлению в России, мы продолжаем развивать стайлинг виниловыми плёнками благодаря печати на виниловых плёнках в сотрудничестве с производителями материала и оборудования.
Слесарный ремонт — ремонт и диагностика ходовой, техническое обслуживание, замена колодок и тормозных дисков, замена масел в коробке и моторе — это услуги, которые востребованы у каждого автовладельца. Не зря своевременно обслуживание обеспечивает долгий срок службы автомобиля. Ремонт и тюнинг подвески, замена тормозной системы — всё это возможно благодаря работе с представителями ведущих брендов — Brembo и D2Racing.
Техническое обслуживание марок: Acura, Alfa Romeo, Audi, BMW, Cadillac, Chevrolet, Chrysler, Citroen, Dodge, Fiat, Ford, Honda, Hummer, Hyundai, Infiniti, Jaguar, Jeep, Kia, Land Rover, Lexus, Mazda, Mercedes-Benz, Mini, Mitsubishi, Nissan, Opel, Peugeot, Porsche, Renault, Saab, Scion, SEAT, Skoda, Smart, Subaru, Suzuki, Toyota, Volkswagen, Volvo.
|
№ п/п |
Код ТН ВЭД ЕАЭС |
Номер и дата |
Товар |
|
1. |
3214 10 |
№ 394 |
Пена монтажная полиуретановая |
|
2. |
8518 30 950 0 |
№ 498 |
Гарнитура «BLUETOOTH» |
|
3. |
8438 50 000 0 |
№ 555 |
Мясорубки бытовые и промышленные |
|
4. |
8716 39 300 |
№ 556 |
Полуприцеп-кормовоз саморазгружающийся |
|
5. |
5601 21 100 0 |
№ 557 |
Вата медицинская гигроскопическая нестерильная |
|
6. |
8517 61 000 2 |
№ 558 |
Система «RAS 6000» (станция радиосвязи с абонентами) |
|
7. |
8704 10 |
№ 720 |
Автомобиль-самосвал |
|
8. |
8705 90 900 1 |
№ 749 |
Машина подметально-уборочная (внесены изменения Решением Коллегии Евразийской экономической комиссии от 21.11.2016 № 155) |
|
9. |
4811 90 000 0 |
№ 750 |
Бумага термочувствительная (внесены изменения Решением Коллегии Евразийской экономической комиссии от 05.05.20015 № 40) |
|
10. |
8704 |
№ 751 |
Транспортное средство типа «PickUp» |
|
11. |
3916 |
№ 786 |
Профили фасонные из пластмасс |
|
12. |
2501 |
№ 787 |
Препарат, содержащий морскую воду |
|
13. |
7320 |
№ 788 |
Комплектующие для зерноуборочных комбайнов |
|
14. |
8483 |
№ 789 |
Редуктор отбора мощности для зерноуборочных комбайнов |
|
15. |
3004 90 190 9 |
№ 817 |
Гель глазной «Офтагель» (внесены изменения Решением Комиссии Таможенного союза от 09.12.2011 № 859; Решением Коллегии Евразийской экономической комиссии от 29.10.2013 № 237) |
|
16. |
3005 90 |
№ 818 |
Бинт эластичный медицинский, расфасованный для розничной продажи |
|
17. |
7308 |
№ 861 |
Металлочерепица |
|
18. |
8419 81 200 9 |
№ 862 |
Кофемашина (внесены изменения Решением Коллегии Евразийской экономической комиссии от 02.12.2014 № 215) |
|
19. |
8704 |
№ 863 |
Автомобиль-эвакуатор |
|
20. |
9406 00 |
№ 910 |
Тепличный комплекс со встроенным оборудованием для выращивания цветов, грибов, овощных или ягодных культур (внесены изменения Решением Коллегии Евразийской экономической комиссии от 21.11.2016 № 155) |
|
21. |
8707 |
№ 8 |
Каркас кузова легкового автомобиля |
|
22. |
2710 |
№ 99 24.04.2013 |
Сложный органический растворитель |
| 23. | № 237 29.10.2013 | О
внесении изменений в Решение Комиссии Таможенного союза от 18 октября 2011 г. № 817 | |
| 24. | 8433 51 000 | № 248 05.11.2013 | Силовой энергомодуль зерноуборочного комбайна |
| 25. | 9006 30 000 0 | № 62 13.05.2014 | Флюорографическая камера, представленная отдельно от рентгеновских и флюорографических аппаратов и предназначенной для установки в таких аппаратах |
| 26. | 8302 30 000 | № 83 03. 06.2014 06.2014 |
Салазки крепления переднего сидения моторного транспортного средства |
| 27. | 8430 69 000 8 | № 84 03.06.2014 | Гидравлический молот |
| 28. | 8702 10 8702 90 |
№ 85 03.06.2014 | Транспортное средство типа фургон |
| 29. | 2710 | № 86 03.06.2014 | Отдельные виды углеводородов (внесены изменения Решением Коллегии Евразийской экономической комиссии от 18.08.2015 № 92) |
| 30. | 8716 | № 116 18.07.2014 | Ручная гидравлическая тележка с подъемными вилами для поддонов |
31. |
8418 69 000 8 | № 117 18.07.2014 | Холодильная машина «чиллер» |
| 32. | 9019 10 900 1 | № 118 18.07.2014 | Гидромассажная душевая кабина и гидромассажная ванна |
| 33. | 2106 90 920 0 | № 119 18.07.2014 | Витаминно-минеральный комплекс |
| 34. | 9403 | № 120 18.07.2014 | Стенды, стойки и экспозиторы |
| 35. | 8302 41 500 0 | № 121 18.07.2014 | Ножницы на раме |
| 36. | 8302 50 000 0 | № 122 18.07.2014 | Кронштейны из недрагоценных металлов |
37. |
9021 90 900 0 | № 135 19.08.2014 |
Коронарный стент (внесены изменения Решением Коллегии Евразийской экономической комиссии от 30.06.2015 № 71) |
| 38. | 9619 00 | № 156 16.09.2014 |
Подгузники детские одноразовые (внесены изменения Решением Коллегии Евразийской экономической комиссии от 14.11.2017 № 156) |
| 39. | 5208 | № 157 16.09.2014 |
Ткань марлевая |
| 40. | 3909 30 000 0 | № 159 16.09.2014 |
Полиметиленфенилизоцианат (полимерный метилендифенилизоцианат, «полимерный МДИ») (внесены изменения Решением Коллегии Евразийской экономической комиссии от 06.11.2014 № 198; Решением Коллегии Евразийской экономической комиссии от 21.  11.2016 № 155) 11.2016 № 155) |
| 41. | 3808 | № 197 06.11.2014 | Кормовая добавка для животных |
| 42. | 3909 30 000 1 | № 198 06.11.2014 | Полиметиленфенилизоцианат (полимерный метилендифенилизоцианат, «полимерный МДИ») (внесены изменения Решением Коллегии Евразийской экономической комиссии от 21.11.2016 № 155) |
| 43. | | № 40 05.05.2015 | О внесении изменений в Решение Комиссии Таможенного союза от 16 августа 2011 г. № 750 |
| 44. | 8431 49 800 9 | № 41 05.05.2015 | Алюминиевый радиатор для экскаватора |
| 45. | 8543 70 900 0 | № 42 05. 05.2015 05.2015 |
Светодиодная лампа (внесены изменения Решением Коллегии Евразийской экономической комиссии от 21.11.2016 № 156)(внесены изменения Решением Коллегии Евразийской экономической комиссии от 21.04.2020 № 51) |
| 46. | 3917 | № 43 05.05.2015 | Рукав для запекания |
| 47. | 8427 | № 70 30.06.2015 | Электрическая тележка с рукоятью управления |
| 48. | | № 71 30.06.2015 | О внесении изменений в Решение Коллегии Евразийской экономической комиссии от 19 августа 2014 г. № 135 |
| 49. | | № 92 18.08.2015 | О
внесении изменений в Решение Коллегии Евразийской экономической комиссии от 03
июня 2014 г. № 86 № 86 |
| 50. | 8481 | № 93 18.08.2015 | Насос-дозатор |
| 51. | 3004 | № 102 01.09.2015 | Отдельные водные растворы для гемодиализа |
| 52. | 8205 59 809 9 | № 115 10.09.2015 | Пистолет для профессиональной монтажной пены |
| 53. | 8716 | № 152 17.11.2015 | Детские санки |
| 54. | 8543 | № 153 17.11.2015 | Светодиодная лента (светодиодная планка) |
| 55. | 3920 | № 156 01.12.2015 | Листы из композитного материала, имитирующего природный камень |
| 56. | 7616 | № 164 08.12.2015 | Биметаллический секционный радиатор |
| 57. | 3808 | № 165 08.12.2015 | Водно-спиртовой раствор формальдегида |
| 58. | 3004 | № 17 09.02.2016 | Имплантат для внутрисуставного введения |
| 59. | 8421 39 800 2 8421 39 800 7 |
№ 78 05.07.2016 | Сепараторы для очистки попутного нефтяного газа Сепараторы для очистки природного углеводородного газа; |
| 60. | 1518 00 | № 84 26.07.2016 | Смесь гидрогенизированных фракций пальмового масла |
| 61. | 8479 89 970 8 | № 86 26.07.2016 | Электрические стеклоподъемники |
| 62. | 3602 00 000 0 8479 |
№ 96 30.08.2016 |
Кумулятивный заряд Скважинный корпусной перфоратор |
| 63. | 0710 90 000 0 | № 129 01.11.2016 | Замороженные смеси овощей |
| 64. | 3002 10 910 0 | № 134 01.11.2016 | Сушеный гемоглобин (внесены изменения Решением Коллегии Евразийской экономической комиссии от 27.12.2016 № 172) |
| 65. | 4820 10 300 0 | № 142 08.11.2016 | Бумажные блоки для заметок |
| 66. | | № 155 21.11.2016 | О внесении изменений в некоторые решения Комиссии Таможенного союза и Коллегии Евразийской экономической комиссии (внесены изменения в Решения Комиссии Таможенного союза № 749 от 16.08.2011, № 910 от 25.01.2012 и в Решения Коллегии Евразийской экономической комиссии № 159 от 16.09.2014, № 198 от 06.11.2014) |
| 67. | | № 156 21.11.2016 | О внесении изменения в пункт 1 Решения Коллегии Евразийской экономической комиссии от 5 мая 2015 г. № 42 |
| 68. | | № 172 27.12.2016 | О внесении изменения в Решение Коллегии Евразийской экономической комиссии от 1 ноября 2016 г. № 134 |
| 69. | 8707 | № 173 27.12.2016 | Компактор мусоропрессовочный |
| 70. | 8705 20 000 | № 7 24.01.2017 |
Установка для подземного ремонта скважин |
| 71. | 2710 | № 8 24.01.2017 |
Смазочный материал |
| 72. | 9018 90 840 9 | № 15 07.02.2017 | Одноразовый набор для обеззараживания плазмы донорской крови |
| 73. | 9404 | № 16 07.02.2017 | Латексные пластины для изготовления матрацев |
| 74. | 1704 90 650 0 | № 17 07.02.2017 | Жевательные конфеты |
| 75. | 8415 | № 28 28.02.2017 | Конденсаторы и испарители для систем кондиционирования воздуха моторных транспортных средств |
| 76. | 8443 99 900 0 | № 48 11.05.2017 | Чернильный картридж для струйного принтера |
| 77. | 6907 | № 49 11.05.2017 | Фасадная керамическая плитка |
| 78. | 8433 59 | № 50 11.05.2017 | Ботвоудалитель картофельный |
| 79. | 8516 | № 51 11.05.2017 | Бытовой отпариватель для одежды |
| 80. | 1604 1605 |
№ 52 11.05.2017 | Солено-сушеная рыба Солено-сушеные кальмары |
| 81. | 3916 3918 3918 3925 |
№ 56 23.05.2017 | Изделия, изготовленные из древесно-полимерного композита (декинг): — профиль; — панели, применяемые в качестве напольных покрытий; — террасная доска; — фасадные панели |
| 82. | 7204 | № 81 03.07.2017 | Трубы из черных металлов для нефтегазопроводов, бывшие в употреблении, непригодные для использования в том качестве, для которого они предназначены |
| 83. | 8479 8479 8431 |
№ 88 18.07.2017 | Гидравлический трубный ключ Универсальный машинный ключ Вращатель бурильной трубы |
| 84. | 7304 | № 89 18.07.2017 | Буровая штанга |
| 85. | 3904 | № 93 04.08.2017 | Смесь на основе поливинилхлорида, используемая при производстве обоев |
| 86. | 3923 | № 100 18.08.2017 | Тупфер, предназначенный для сохранения и транспортировки проб |
| 87. | 8474 20 000 3 | № 103 29.08.2017 | Дробильно-сортировочная установка |
| 88. | 8479 89 | № 104 29.08.2017 | Металлический силос для хранения зерновых и масличных культур |
| 89. | 8705 40 000 | № 105 29.08.2017 | Бетоносмесительная машина с функцией самозагрузки |
| 90. | 3004 | № 126 26.09.2017 | Противовирусный препарат для лечения ВИЧ-инфицированных пациентов |
| 91. | 9018 31 | № 132 03.10.2017 | Комплектующие для одноразовых шприц-ручек, применяемых для подкожного введения инсулина |
| 92. | 9619 00 810 9 | № 156 14.11.2017 | Подгузники детские одноразовые |
| 93. | 8441 30 000 0 | № 180 19.12.2017 | Автоматический плосковысекательный пресс для изготовления картонных коробов |
| 94. | 8408 90 | № 15 31.01.2018 | Судовой дизельный двигатель, предназначенный для вращения ротора электрогенераторной установки (внесены изменения Решением Коллегии Евразийской экономической комиссии от 28.01.2020 № 20) |
| 95. | 9619 00 710 9 9619 00 790 9 9619 00 890 9 |
№ 19 31.01.2018 | Одноразовые женские гигиенические прокладки Одноразовые гигиенические вкладыши для бюстгальтера Одноразовые подгузники для взрослых |
| 96. | 8430 61 000 0 | № 31 28.02.2018 | Виброплита |
| 97. | 0406 10 0406 90 |
№ 32 28.02.2018 | Молодые (свежие) рассольные сыры Зрелые рассольные сыры |
| 98. | 7326 8431 43 000 0 |
№ 38 13.03.2018 | Жесткие и пружинные центраторы Буровые центраторы |
| 99. | 3004 90 000 | № 63 24.04.2018 | Препараты для лечения заболеваний дыхательных путей |
| 100. | 7322 | № 73 10.05.2018 | Вентиляционная приточная установка с водяным неэлектрическим нагревом |
| 101. | 7612 90 200 0 | № 92 29.05.2018 | Алюминиевые емкости для производства аэрозольных баллонов |
| 102. | 2106 | № 101 13.06.2018 | Комбинированный препарат из смеси растительного сырья |
| 103. | 5806 | № 102 13.06.2018 | Текстильная полиэстеровая лента |
| 104. | 8426 11 000 0 | № 107 09.07.2018 | Мостовой кран на неподвижных опорах |
| 105. | 8802 30 000 2 | № 120 24.07.2018 | Самолет |
| 106. | 8412 | № 130 21.08.2018 | Гидравлический перфоратор |
| 107. | 8412 | № 131 21.08.2018 | Погружной пневмоударник |
| 108. | 2106 2202 |
№ 137 21.08.2018 | Специализированный пищевой продукт в виде порошка или концентрированной жидкости Специализированный пищевой продукт в виде жидкости |
| 109. | 3004 50 000 | № 161 16.10.2018 | Железосодержащий препарат |
| 110. | 1504 | № 162 16.10.2018 | Рыбий жир в капсулах |
| 111. | 8479 10 000 0 | № 165 16.10.2018 | Ресайклер |
| 112. | 2106 | № 171 30.10.2018 | Биологически активная добавка к пище в виде жевательного мармелада |
| 113. | 8802 9503 00 |
№ 172 30.10.2018 | Квадрокоптер, способный к автоматизированному полету Квадрокоптер, не способный к автоматизированному полету |
| 114. | 3808 | № 175 30.10.2018 | Изделия, пропитанные исектицидными и акарицидными веществами |
| 115. | 8536 | № 183 12.11.2018 | Реле давления |
| 116. | 7326 | № 184 12.11.2018 | Металлические каркасы для бюстгальтеров |
| 117. | 3926 | № 211 25.12.2018 | Мочеприемник |
| 118. | 8311 20 000 0 | № 212 25.12.2018 | Проволока порошковая |
| 119. | 8419 20 000 0 | № 213 25.12.2018 | Стерилизатор паровой Стерилизатор низкотемпературный для стерилизации помещений |
| 120. | 8517 12 000 0 | № 16 29.01.2019 | Часы-телефон для детей |
| 121. | 2008 2106 |
№ 17 29.01.2019 | Фруктово-ягодные наполнители на основе фруктово-ягодного пюре Фруктово-ягодные наполнители на основе смеси фруктово-ягодного пюре с фруктово-ягодными соками |
| 122. | 8438 90 000 0 | № 24 12.02.2019 | Оборудование, входящее в состав линии для изготовления мороженого |
| 123. | 8701 10 000 0 | № 25 12.02.2019 | Мотоблок (мотокультиватор) |
| 124. | 8716 31 000 0 | № 27 12.03.2019 | Цистерна для полуприцепа |
| 125. | 2710 19 840 0 | № 28 12.03.2019 | Масло гидравлическое |
| 126. | 8543 | № 45 26.03.2019 | Портативное устройство для чтения книг в электронном формате |
| 127. | 3002 90 500 0 | № 56 16.04.2019 | Препарат на основе живых молочнокислых бактерий |
| 128. | 0202 30 | № 57 16.04.2019 | Мясной полуфабрикат «котлета из говядины» |
| 129. | 2710 | № 65 16.04.2019 | Газохол, применяемый в качестве моторного топлива |
| 130. | 3004 50 000 | № 70 14.05.2019 | Витаминосодержащие препараты |
| 131. | 3924 90 000 0 | № 74 21.05.2019 | Душевые комплекты |
| 132. | 8470 | № 75 21.05.2019 | Лотерейный терминал |
| 133. | 7117 | № 76 21.05.2019 | Медали из недрагоценных металлов |
| 134. | 2106 | № 77 21.05.2019 | Жидкий концентрат для приготовления безалкогольных напитков |
| 135. | 2818 10 | № 84 04.06.2019 | Искусственный корунд (а-модификация) |
| 136. | 8536 | № 94 11.06.2019 | Сетевой фильтр |
| 137. | 3923 | № 99 18.06.2019 | Футляр для декоративной косметики |
| 138. | 2106 | № 100 18.06.2019 | Пшеничная клетчатка Гороховая клетчатка Соевая клетчатка |
| 139. | 8438 40 000 0 | № 105 25.06.2019 | Мини-пивоварня |
| 140. | 8716 31 000 0 | № 115 09.07.2019 | Полуприцеп-кормовоз |
| 141. | 8431 | № 120 16.07.2019 | Секция башенного крана |
| 142. | 8424 30 010 0 | № 122 23.07.2019 | Комплексная мойка самообслуживания |
| 143. | 9021 90 900 9 | № 123 23.07.2019 | Кардиологический окклюдер |
| 144. | 8539 50 000 0 | № 167 23.09.2019 | Светодиодная лампа с аккумулятором и пультом управления (внесены изменения Решением Коллегии Евразийской экономической комиссии от 21.04.2020 № 51) |
| 145. | 2106 | № 173 08.10.2019 | Препараты на основе беззародышевых водных субстратов продуктов обмена веществ микроорганизмов |
| 146. | 2106 | № 180 14.10.2019 | Магнийсодержащий препарат |
| 147. | 8529 | № 184 29.10.2019 | Теплоотвод для центрального процессора телевизионного приемника |
| 148. | 8429 | № 189 29.10.2019 | Экскаватор-перегружатель |
| 149. | 4819 40 000 0 | № 196 19.11.2019 | Мешки бумажные |
| 150. | 8462 | № 214 03.12.2019 | Линия по производству металлических крышек типа «твист-офф» |
| 151. | 3006 10 | № 220 17.12.2019 | Атравматический шовный материал (представляющий собой шовную нить с одной или двумя атравматическими иглами) |
| 152. | 9403 | № 14 28.01.2020 | Стальной шкаф |
| 153. | 3824 | № 15 28.01.2020 | Гигиенический силикагелевый наполнитель для кошачьего туалета |
| 154. | | № 20 28.01.2020 | О внесении изменений в Решение Коллегии Евразийской экономической комиссии от 31.01.2018 № 15 |
| 155. | 3701 | № 29 26.02.2020 | Сенсибилизированные печатные пластины |
| 156. | | № 51 21.04.2020 | О внесении изменений в Решения Коллегии Евразийской экономической комиссии от 05.05.2015 № 42 и от 23.09.2019 № 167 |
| 157. | 8536 69 | № 55 21.04.2020 | Электрические соединители |
| 158. | 9021 10 900 0 9021 10 900 0 |
№ 139 03.11.2020 | Транспедикулярная система фиксации позвоночника Комплектующие для транспедикулярной системы фиксации позвоночника |
| 159. | 2208 20 290 0 | № 140 03.11.2020 | Спиртной напиток дивин (Divin) |
| 160. | 1517 90 910 0 | № 147 17.11.2020 | Пищевая жидкая смесь растительных масел |
| 161. | 8518 30 950 0 | № 150 24.11.2020 | Портативная беспроводная акустическая система |
| 162. | 8479 | № 151 24.11.2020 | Репроцессор для обработки эндоскопов |
| 163. | 8535 90 000 8536 90 |
№ 152 24.11.2020 | Ввод для трансформатора, рассчитанный на напряжение более 1000 В Ввод для трансформатора, рассчитанный на напряжение |
| 164. | 2309 2309 2102 2102 |
№ 153 24.11.2020 |
Кормовая добавка, состоящая из активных дрожжей и продукта переработки растительного сырья Кормовая добавка, представляющая собой дрожжевой экстракт, полученный ферментативным гидролизом |
| 165. | 3823 2309 |
№ 160 01.12.2020 | Смесь монокарбоновых жирных кислот пальмового масла, распыленных на носитель Смесь монокарбоновых жирных кислот пальмового масла |
| 166. | 0210 | № 165 08.12.2020 | Мясной сыровяленый продукт |
| 167. | 3004 | № 166 08.12.2020 | Препарат для лечения угревой сыпи |
| 168. | 7322 | № 168 15.12.2020 | Горелка газовая инфракрасная |
| 169. | 8504 | № 187 29.12.2020 | Трансформаторная подстанция |
| 170. | 7311 00 | № 9 19.01.2021 |
Стальные баллоны высокого давления в незавершенном виде |
| 171. | 9021 90 900 9 | № 26 01.03.2021 | Имплантат молочной железы |
| 172. | 8479 | № 37 30.03.2021 | Мобильный робототехнический комплекс |
| 173. | 3002 90 300 0 3004 90 000 2 |
№ 38 30.03.2021 | Препарат в форме раствора для внутривенных и
внутримышечных инъекций, содержащий в качестве активного действующего вещества
депротеинизированный гемодиализат, полученный из крови телят Препарат в форме дентальной адгезивной пасты,
содержащий в качестве активных действующих веществ депротеинизированный
гемодиализат, полученный из крови телят |
| 174. | 8479 10 000 0 | № 50 20.04.2021 | Ледозаливочная самоходная машина |
| 175. | 8516 | № 54 11.05.2021 | Паровой шкаф |
| 176. | 8528 71 910 0 | № 61 01.06.2021 | Телевизионная приставка |
| 177. | 6506 | № 78 29.06.2021 | Щиток (маска) сварщика |
| 178. | 8515 | № 87 13.07.2021 | Аавтоматизированная линия для изготовления прямошовных электросварных труб |
 03.2011
03.2011 06.2011
06.2011

 12.2011
12.2011
КЛАССИФИКАЦИЯ ЛЕГКОВЫХ АВТОМОБИЛЕЙ В РОССИЙСКОЙ ФЕДЕРАЦИИ И ЕВРОПЕЙСКОМ СОЮЗЕ. ТЕХНИЧЕСКИЕ НОРМЫ ЗАГРУЗКИ АВТОМОБИЛЯМИ СУДНА ПРОЕКТА РСТ-54 Текст научной статьи по специальности «Экономика и бизнес»
УДК 656.624.3
A.И. Телегин, д.т.н., профессор, ФГБОУВО «ВГУВТ»
B.Н. Шабров, аспирант, ФГБОУ ВО «ВГУВТ» А.А. Курбанов, аспирант ФГБОУ ВО «ВГУВТ» 603951, г. Нижний Новгород, ул. Нестерова, 5.
КЛАССИФИКАЦИЯ ЛЕГКОВЫХ АВТОМОБИЛЕЙ В РОССИЙСКОЙ ФЕДЕРАЦИИ И ЕВРОПЕЙСКОМ СОЮЗЕ. ТЕХНИЧЕСКИЕ НОРМЫ ЗАГРУЗКИ АВТОМОБИЛЯМИ СУДНА ПРОЕКТА РСТ-54
Ключевые слова: классификация легковых автомобилей, технические нормы, загрузка судов.
В статье проанализированы системы классификации легковых автомобилей в Российской Федерации и Европейском союзе, а также изучена и представлена Общепринятая Европейская классификация легковых автомобилей. На основе данных классификаторов разработаны технические нормы загрузки судна проекта РСТ-54, которые можно использовать для составления транспортно-технологических схем и процессов доставки автомобилей, как на одном виде транспорта, так и в комбинированных сообщениях, в том числе с участием речного транспорта.
В Российской Федерации ежегодно производится в среднем один миллион легковых автомобилей разных моделей, доставляемых до дилерских центров и непосредственно до покупателей автомобильным и железнодорожным транспортом. Все автомобильные заводы находятся в приречных зонах, на берегу или вблизи судоходных рек, однако, внутренние водные пути для доставки партий автомобилей в навигационный период не используются, хотя в 1970-80 гг. такой опыт был [1].
Исследованиями доказано, что 200-220 тыс. легковых автомобилей в каждую навигацию можно перевозить в комбинированных сообщениях с участием речного транспорта, применяя пять основных логистических схем доставки груза «от двери до двери»: прямое смешанное железнодорожно-автомобильное сообщение; прямое смешанное железнодорожно-водное сообщение; прямое смешанное железнодорожно-водно-автомобильное сообщение; прямое автомобильное и прямое водное сообщения.
Для организации таких перевозок с участием речного транспорта необходимо прежде всего знать существующую систему классификации легковых автомобилей, чтобы правильно строить взаимоотношения между заводами-производителями автомобилей, транспортными и транспортно-экспедиционными предприятиями, разработать оптимальные транспортно-технологические процессы перевозки, погрузки-выгрузки, перевалки и складирования автомобилей, а также оформлять всю необходимую коммерческую документацию приема-передачи груза и отчётности.
Следует обратить внимание на то, что системы классификации автомобилей строились в СССР и Европейских странах по-разному, с учетом национальных особенностей и принятых идеологий. В Советском Союзе, а позднее в Российской Федерации этот процесс был в ведении Министерства внутренних дел (МВД), в составе которого функционировал отдел по учету автотранспорта [2]. Поначалу это был ОРУД, затем его сменила Госавтоинспекция, и в настоящее время эти функции выполняет ГИБДД МВД РФ. Система классификации автомобилей в СССР была введена в действие в 1966 году, причем специальным нормативным документом ОН 025270-66 (отраслевая нормаль) [3]. В настоящее время она носит рекомендательный характер, как и все отраслевые технические условия. В соответствии с данной отрас-
левой нормалью легковые автомобили подразделяются на 5 классов в зависимости от рабочего объема двигателя (таблица 1).
Таблица 1
Классификация легковых автомобилей в соответствии с ОН 025270-66
Первая цыфра индекса Класс легкового Рабочий объем
легкового автомобиля автомобиля двигателя, л (дм3)
1 Особо малый до 1,2
2 Малый от 1,3 до 1,8
3 Средний от 1,9 до 3,5
4 Большой свыше 3,5
5 Высший рабочий объем не регла-
ментируется
В соответствии с упомянутым документом название каждой модели состоит из аббревиатуры завода-изготовителя и цифрового кода из четырех и более цифр, которые обозначали следующее:
— Первая — класс автомобиля.
— Вторая — тип транспортного средства.
— Третья и четвертая — заводской номер модели.
— Пятая — модификация.
— Шестая — импортное исполнение.
В качестве примера использования данной классификации в отношении популярного автомобиля советского производства можно привести ее расшифровку для одной из моделей малого класса (ВАЗ-21070). Это обозначение расшифровывается:
2 — машина имеет объем двигателя в пределах от 1,2 до 1,8 л;
1 — в пассажирском исполнении;
07 — седьмая модель по заводской нумерации;
0 — модификация в данном случае с роторно-поршневым двигателем.
Данная система классификации оказалась достаточно удобной в условиях централизованного государства (СССР) и планового хозяйства. Она осталась пока неизменной в Российской Федерации для установленных классов легковых автомобилей, однако, в условиях рыночной экономики отдельные российские заводы-изготовители допускают некоторые отклонения от сложившейся практики классификации, что приводит к путанице и дезориентации потребителей.
С учетом интеграции отечественного автопрома с зарубежными производителями легковых автомобилей стали применяться буквенные обозначения. Например, ВАЗ-2170 более известен как LADA Priora (седан) [4].
В странах Западной Европы широко используется так называемая Общепринятая европейская классификация, согласно которой выделяются классы: A, B, C, D, E, F, куда автомобили включаются в зависимости от размеров, мощности двигателя, комплектации и стоимости. Данная классификация часто применяется журналистами на автосалонах и выставках для сравнения автомобилей разных моделей и модификаций.
К указанным классам относятся к примеру:
A — относительно маленькие автомобили с двигателями небольшого литража и невысокой стоимости;
F — дорогие, престижные, как правило, большие автомобили с мощными двигателями.
В промежуточные между ними классы вписывается все многообразие выпускаемых в мире легковых автомобилей, без четких классификационных критериев.
Некоторые автомобильные журналы определяют примерные границы классов
легковых автомобилей, принимая за основу их длину. Также учитывается основное назначение автомобиля или его внешний типаж.ах 145-192 км/ч Малый класс (особо малый, малогабаритные авто). Это достаточно популярный в Европе класс машин, значительное число которых имеет кузов хетчбэк (3 или 5 дверей) и передний привод. «Таврия», «Калина», «Опель Корса», «Пежо 206», «Рено Клио»
C Длина 390-430 см ширина 163-169 см высота 139-151 см. Объем 1,2-2,3 л. мощность 65169 л.с. Vmax 160-223 км/ч Низший средний класс. Его еще называют «Гольф-классом». Причина проста — его типичный представитель Volkswagen Golf вот уже несколько десятилетий является здесь законодателем мод. «Лада Самара», «Фольксваген Гольф», «Рено Меган», «Пежо 307», «Форд Фокус»
D Длина 430-460 см ширина 169-173 см высота 132-143 см. Объем 1,6-2,5 л. мощность 75170 л.с. Vmax 175-225 км/ч Средний класс. Один из наиболее динамично развивающихся классов автомобилей, часто автомобили этого класса «отбивают» покупателей у следующего — класса Е. «Москвич 2141», «Мерседес С», «Фольксваген Пассат», «Вольво 540», «Пежо 406», «Опель Вектра»
E Длина 460-490 см ширина 173-182 см высота 143-145 см.ах 200-250 км/ч Высший класс. Сосредоточил в себе комфортабельные мощные автомобили, а потому еще называется «люкс» или «представительским классом». «ЗИЛ-41041», «БМВ» 7-й серии, «Мерседес 5», «Лексус LS 400», «Ауди А8»
Европейская классификация легковых автомобилей общепринята и повсеместно используется на автомобильных предприятиях, дилерских центрах, а также покупателями автотранспортных средств.
По мере развития автомобильной промышленности постоянно появляются новые автомобили, занимающие свои ниши на автомобильном рынке, расширяется и их классификация. Нередко появившиеся автомобили занимают промежуточные границы и образуют затем новый класс. Ярким примером этого стало в свое время появление внедорожников, предназначенных в основном для движения за пределами дорог с твердым покрытием. Этот класс автомобилей в настоящее время имеет название «внедорожник».
Приведенный классификатор (таблица 2) включает в себе многие характеристики легковых автомобилей, которые можно использовать для составления транспортно-технологических схем и процессов доставки как на одном виде транспорта, так и в комбинированных сообщениях, в том числе с участием речного транспорта. Однако у классификатора, с точки зрения вышеизложенного, есть один недостаток — отсутствие весовых данных автомобилей. Эти данные на речном транспорте нужны в первую очередь для разработки технических норм загрузки судов.
Техническая норма загрузки судна — это количество груза, которое должно быть загружено в судно определенного типа при наилучшем использовании его грузоподъемности и (или) грузовместимости. При перевозке партий легковых автомобилей в судах должно быть определено наилучшее использование грузовместимости.
Результаты расчета технических норм загрузки легковыми автомобилями теплохода проекта РСТ-54 представлены в таблице 3.
Таблица 3
Расчетные технические нормы загрузки судна проекта РСТ-54 легковыми автомобилями
Класс автомобиля Габариты (Ь — длина, В — ширина) Кол-во, шт. Масса (условная, т) Использование грузоподъемности судна, %
Судно — автомоби-левоз (проект РСТ- А L до 350 см В до 152 см 350 280 4.9
54) Грузоподъемность = 5745т В L=350-390 см В=152-163см 335 368 6.4
С L=390-430 см В=163-169 см 322 419 7.3
D L=430-460 см В=169-173 см 300 450 7.8
Е L=460-490 см В=173-182 см 289 491 8.5
F L=480 см и более В свыше 182 см 276 607 10.6
Как видно из таблицы 3, использование судна по грузоподъемности при перевозке партий легковых автомобилей разное: класс А — 4,9%, класс F — 10,6%. С учетом этой нормы загрузки должны рассчитываться и соответствующем тарифные или фрахтовые ставки на перевозку партий легковых автомобилей в судне, чтобы обеспечивалась их рентабельная перевозка для судоходной компании.
Список литературы:
[1] Шабров В.Н. Состояние и перспективы производства автомобильной техники в России и возможности её перевозки с использованием речного транспорта / В.Н. Шабров, А.И. Телегин,
158
А.О. Ничипорук // Вестник ВГАВТ. — № 43. — 2015. — С. 258-265.
[2] Интернет сайт: http://voditeliauto.ru/poleznaya-informaciya/auto/klassy/avtomobilej-tablica.html
[3] Классификация и маркировка автомобилей. Методические указания к практическим занятиям по дисциплине «Основы конструкции автомобилей». Учебное издание. — М.: МАДИ, 2010. -С. 50.
[4] Ассоциация европейских транспортных средств логистики. Электронный ресурс. -Режим доступа: http://www.ecgassociation.eu
CARS CLASSIFICATION IN THE RUSSIAN FEDERATION AND THE EUROPEAN UNION. TECHNICAL CAR CARGO LOADING STANDARDS FOR THE VESSEL OF RST-54 PROJECT
A.I. Telegin, V.N. Shabrov, A.A. Kurbanov
Key words: cars classification, technical vessel loading standards
The article analyzes the system of classification ofpassenger cars in the Russian Federation and the European Union, as well as the authors investigate and present the Common European classification of cars. Based on the presented classifications for the vessel of the project RST-54 the authors developed technical loading standards, which can be used for transport-technological schemes drawing and car delivery processes by one mode of transport and in combined communications including river transport.
Статья поступила в редакцию 18.04.2017 г.
Алексей Лемешевский (voice-msk) — Хабр Карьера
Ищу проекты, в которых требуется опыт решения broad-crawl задач, извлечение ценной информации из неструктурированных данных.
Последние 2 года больше всего занимался: разработкой прототипов интернет-сервисов, big data, data mining, data extract, broad-crawl, парсинг, поисковые web-роботы, компьютерный анализ текстов (NLP), разработка интерфейсов, разработка интернет-магазинов, консалтинг интернет-магазинов.
Разработка решений для автоматического поиска, извлечения и структурирования данных. Анализ поисковых фраз, текстов, коммерческих данных.
Технические навыки:
— интернет-технологии: общее глубокое понимание
— прикладная и web-разработка, верстка: html/css, js/ajax/xml/json,
python/perl/php , ранее c++/delphi/pascal — отладка: tcpdump, firebug/fiddler, web developer tools
— БД: MySQL, HBase, ClickHouse, Kafka
— администрирование: unix/linux/win server; web/mail сервера; tcp/ip, dhcp, dns, proxy (squid)
Профессиональные цели:
Быть полезным 🙂
Награды, сертификаты, портфолио, проекты:
SPECIALIST® Online Certified JavaScript Specialist
SPECIALIST® Online Certified PHP5 Professional Specialist
Сертификат «1С: Конфигурированние и программирование»
Свидетельство «Радиомеханик по ремонту радиоэлектронного оборудования 3-го разряда»
Курсы по расширенным возможностям MS Excell/PowerPoint от specialist.ru
«Домашние» проекты:
https://frontera.su/
https://manystat.ru/
http://koneshop.ru/
Дополнительная информация:
— Склонен глубоко разбираться в задаче или предметной области — лучше всего справляюсь с большими сложными задачами не требующими ответа «здесь и сейчас», но требующие особого подхода в решении.
— Подхожу творчески к решению задач (когда это уместно).
— Всегда автоматизирую ручную, монотонную работу.
— Полностью отдаюсь области, которая мне интересна на конкретный момент времени.
— Люблю мир и людей
— Люблю фотографировать (есть несколько проектов)
— Иногда играю на гитаре и пишу музыку на компьютере/синтезаторе.
классификация изображений автомобилей с использованием функций, извлеченных из предварительно обученных нейронных сетей | Бхану Йерра
Это Корвет?
ИсточникСогласно отчету и прогнозу рынка подержанных автомобилей за 2018 год, опубликованному Cox Automotive, в прошлом году в США было продано 40 миллионов подержанных автомобилей. Это составляет около 70% от общего числа проданных автомобилей. Значительная часть этих продаж уже использует онлайн-ресурсы на различных этапах покупки: поиск, предварительный квалификационный отбор, подача заявки и, наконец, покупка.Популярные сайты для покупателей автомобилей включают AutoTrader.com, Kelly Blue Book, Cars.com, Carvana.com.
Отчет Cox Automotive показывает, что большинство лидеров рынка и стартапов Кремниевой долины предполагают, что продажи автомобилей полностью переведут на розничную торговлю через Интернет. Это может быть крайнее предположение, но эти лидеры рынка заинтересованы в улучшении пользовательского опыта при покупке автомобиля в Интернете и в улучшенных системах рекомендаций, когда пользователь ищет автомобили. Платформы одноранговых продаж, такие как Craigslist, Shift, eBay Motors и т. Д., Также заинтересованы в более эффективном обнаружении мошенничества и мониторинге сообщений пользователей.
Система классификации изображений автомобилей может решить следующие бизнес-проблемы:
- Подтверждение размещенных изображений подержанных автомобилей на платформах одноранговых продаж — действительно ли эти изображения являются автомобилями, которые они указывают? Представляют ли несколько изображений экстерьера одну и ту же машину?
- Организация отображения веб-страниц на основе изображений, загруженных пользователем
- Рекомендации альтернативных автомобилей, имеющихся в инвентаре, которые имеют схожий внешний вид и цену
Кроме того, простая система классификации автомобилей может помочь в выявлении важных деталей. для обнаружения 3D-объектов для беспилотных автомобилей.
Подход, используемый для этого анализа, состоит из трех этапов: этап извлечения признаков, этап построения модели и этап оценки модели / анализа ошибок.
Рис. 1. Подход, использованный для анализаДля этого анализа использовался набор данных изображений автомобилей Стэнфордского университета. Этот набор данных состоит из 16 185 изображений (набор поездов + тестовый тест), помеченных 196 классами в зависимости от марки / модели / года автомобиля. Эти изображения бывают разных размеров и разрешений. Для этого анализа 196 меток изображений в наборе данных были объединены в пять типов транспортных средств, как показано на рисунке ниже.Хотя они представляют собой несколько «грубую» консолидацию типов транспортных средств, они оказались более управляемыми и адекватными для задачи классификации изображений.
Рисунок 2: Классы транспортных средств, используемые в анализеИзвлечение признаков
Особенности для каждого из изображений автомобилей были извлечены из сверточных нейронных сетей глубокого обучения (CNN) с весами, предварительно обученными в наборе данных ImageNet. Создатели этих CNN бесплатно предоставляют эти веса, а платформа моделирования Keras предоставила универсальный доступ к этим сетевым архитектурам и весам.В целом, пять CNN, как показано на рисунке ниже, использовались для извлечения функций и отдельно для задачи классификации, чтобы сравнить, какая архитектура глубокого обучения работает лучше всего. Объекты извлечены из первого полностью связанного скрытого слоя над последним слоем softmax.
Рисунок 3: Классы транспортных средств, использованные в анализе ( ¹ Элементы были извлечены из полностью связанного скрытого слоя ниже последнего слоя softmax)Построение модели
Первым шагом на этапе построения модели было уменьшение размерности извлеченные особенности.Этот шаг помог довести размеры функций до управляемого числа и повысил скорость этапа построения итеративной модели. Уменьшение размерности было выполнено с использованием анализа главных компонентов (PCA), а систематический поиск привел к использованию уменьшенной размерности 500 функций, которые захватили около 85–90% дисперсии функций по пяти CNN.
Исходный набор данных разделен примерно на 50–50% на тестовый поезд. Для этого анализа эти тесты были объединены вместе, и было использовано 80–20% разделения поездов на тесты.Наборы обучающих тестов были созданы таким образом, чтобы сохранялось распределение классов.
На этом этапе процесса использовался ряд методов классификации. К ним относятся: логистическая регрессия, случайные леса, SVM с полиномиальными ядрами, XGBoost и неглубокая нейронная сеть (многослойный классификатор Perceptron от sklearn).
Набор данных после объединения в пять классов имеет дисбаланс классов: фургоны представляют около 6% данных, а на других экстремальных кабриолетах / купе и седанах каждый представляет около 32% данных.Чтобы устранить этот классовый дисбаланс, вышеупомянутые методы классификации были повторены с использованием методов передискретизации: случайная передискретизация и технология синтетической передискретизации меньшинства (SMOTE).
Кроме того, был протестирован составной классификатор, чтобы увидеть, даст ли объединение результатов лучших моделей логистической регрессии и случайного леса лучшие результаты, чем любая из них по отдельности.
Результаты модели и анализ ошибок
Для сравнения производительности модели было рассмотрено несколько показателей.Но после нескольких итераций было отмечено, что точность является достаточным показателем для оценки производительности модели. Выбор любого другого показателя (например, F1 Score) привел бы к аналогичным выводам. Подробный анализ ошибок был проведен путем изучения неправильно классифицированных изображений и изучения любых сходств в этих неправильных классификациях.
Результаты наиболее эффективных моделей представлены на следующем рисунке. Как видно ниже, модель, в которой используются функции, извлеченные из InceptionV3, в целом работает лучше всего, а логистическая регрессия дает немного лучшую точность, чем случайный лес.Модель, использующая функции InceptionV3, логистическую регрессию с регуляризацией L2 и технику случайной передискретизации, была выбрана в качестве предпочтительной модели для этого анализа.
Рисунок 4: Сравнение точности модели для выбранных прогоновМатрица неточностей для предпочтительной модели представлена на рисунке ниже:
Рисунок 5: Матрица неточностей для предпочтительной модели (функции InceptionV3 + логистическая регрессия)В дополнение к отслеживая точность модели, был проведен подробный анализ ошибок, чтобы оценить, где модель работает плохо.Этот анализ ошибок имел решающее значение для выполнения проверки качества (проверки QC) маркировки классов, выявления «слепых пятен» модели и будущих улучшений.
Рисунок 6: Анализ ошибок кабриолетов / купе для предпочтительной модели Рисунок 7: Анализ ошибок седанов для предпочтительной моделиКак видно на рисунках 6 и 7 выше, модель, похоже, выбирает цвета как признак классификации. Правильно идентифицированные кабриолеты / купе имеют богатый цвет, в то время как те, которые ошибочно классифицируются как седаны, менее красочны.Точно так же, как видно на рисунке 7, седаны, ошибочно классифицированные как кабриолеты / купе, более красочны, чем седаны, классифицированные правильно. В большинстве случаев это обнадеживающий результат, так как при этом будут подбираться цвета, характерные для определенной марки / модели автомобиля, но вес, придаваемый цвету, превышает вес элементов, которые представляют форму и размер.
Основные выводы из приведенного выше анализа классификации изображений:
- Создание прототипа модели классификации с использованием предварительно обученных функций CNN довольно эффективно и проще, чем полное построение глубокой нейронной сети с нуля.
- Анализ ошибок весьма полезен и дает представление о том, как можно использовать модели.
- Stanford Cars Dataset
- ImageNet Dataset
- Keras Предварительно обученные модели
- Отчет о рынке подержанных автомобилей 2018 и прогноз
Извлечение функций : extract_features.py
Модель Building 3_FinalModelsRuns.ipynb
Анализ ошибок : 3_Results_Presentation.ipynb
Классификация транспортных средств на основе сверточной нейронной сети в неблагоприятных условиях освещения для интеллектуальных транспортных систем
Вместе с быстрым развитием компьютерного зрения классификация транспортных средств демонстрирует значительный потенциал для изменения формы интеллектуальных транспортных систем. В последние пару десятилетий системы классификации транспортных средств на основе обработки изображений и распознавания образов использовались для повышения эффективности автоматизированных систем сбора платы за проезд и мониторинга дорожного движения.Однако эти методы обучаются на ограниченном количестве созданных вручную функций, извлеченных из небольших наборов данных, которые не учитывают условия дорожного движения в реальном времени. Были предложены системы классификации, основанные на глубоком обучении, чтобы включить вышеупомянутые проблемы в традиционные методы. Однако сверточным нейронным сетям требуются груды данных, включая факторы шума, погоды и освещения, чтобы гарантировать надежность в приложениях реального времени. Более того, нет доступного обобщенного набора данных для проверки эффективности систем классификации транспортных средств.Чтобы преодолеть эти проблемы, мы предлагаем систему классификации транспортных средств на основе сверточной нейронной сети для повышения надежности классификации транспортных средств в приложениях реального времени. Мы представляем набор данных транспортных средств, состоящий из 10 000 изображений, разделенных на шесть общих классов транспортных средств с учетом неблагоприятных условий освещения, чтобы обеспечить надежность систем классификации транспортных средств в реальном времени. Первоначально предварительно обученные AlexNet, GoogleNet, Inception-v3, VGG и ResNet настраиваются на самостоятельно созданном наборе данных о транспортных средствах, чтобы оценить их производительность с точки зрения точности и сходимости.Архитектура ResNet, основанная на более высокой производительности, дополнительно улучшена за счет добавления нового блока классификации в сеть. Чтобы обеспечить обобщение, мы настроили сеть на общедоступном наборе данных VeRi, содержащем 50 000 изображений, которые были разделены на шесть классов транспортных средств. Наконец, было проведено сравнительное исследование предлагаемых и существующих методов классификации транспортных средств для оценки эффективности предлагаемой системы классификации транспортных средств. Следовательно, наша предлагаемая система достигла 99.68%, 99,65% и 99,56% точность, прецизионность и показатель F1 для нашего самостоятельно созданного набора данных.
1. Введение
При экспоненциальном росте производства транспортных средств по всему миру системы классификации транспортных средств могут играть значительную роль в развитии интеллектуальных транспортных систем, т. Е. Автоматизированного сбора платы за проезд на автомагистралях, восприятия беспилотных транспортных средств и дорожного движения. системы управления потоками. Ранее для классификации типов транспортных средств предлагались методы на основе лазерных и петлевых индукционных датчиков [1–4].Эти датчики были установлены под дорожным покрытием для сбора и анализа данных с целью извлечения соответствующей информации о транспортных средствах. Однако на точность и стабильность этих методологий в значительной степени влияют нежелательные погодные условия и повреждение дорожного покрытия [5]. По мере развития компьютерного зрения были предложены системы классификации транспортных средств на основе обработки изображений и распознавания образов [6, 7]. По сути, система классификации на основе компьютерного зрения представляет собой двухэтапную процедуру; На первом этапе используются ручные методы извлечения для получения визуальных характеристик из входного визуального кадра.На втором этапе классификаторы машинного обучения обучаются на извлеченных функциях, чтобы выполнить классификацию на основе данных на основе групп. Созданные вручную функции подразделяются на (i) глобальные и (ii) локальные функции для одновременного описания и представления данных изображения [8]. Эти функции объединены при обучении традиционных классификаторов машинного обучения распознаванию объектов. Хотя эти системы хорошо работают в конкретной контролируемой среде и более удобны с точки зрения установки и обслуживания, чем существующие лазерные и индуктивные схемы, эти методы обучены ограниченным ручным функциям, извлеченным из небольших наборов данных, в то время как обширные предварительные знания необходимы требуется для поддержания точности времени среды [9].
Недавно были внедрены методы извлечения и классификации признаков на основе глубокого обучения, которые продемонстрировали лучшую применимость и адаптируемость, чем традиционные системы классификации. Системы классификации на основе сверточных нейронных сетей (CNN) достигли значительной точности в крупномасштабных наборах данных изображений из-за их сложной архитектуры [10–12]. Тем не менее, разработка графического процессора (GPU) значительно увеличила возможности вычислительных машин по обработке изображений.Но на самом деле система классификации, основанная на CNN, требует груды данных для поддержания точности и обеспечения обобщения. До недавнего времени, насколько нам известно, не существовало обобщенного набора эталонных данных для разработки и оценки систем классификации транспортных средств. Следовательно, доступные наборы данных классификации транспортных средств относительно малы и основаны на ограниченных классах конкретных регионов, например, на CompCars [13] и наборе данных Stanford cars [14]. Интеллектуальные транспортные системы этих регионов могут добиться значительных результатов с этими наборами данных; однако их работе наносится ущерб появлению нерегиональных классов.Чтобы устранить вышеупомянутые ограничения в системах классификации транспортных средств, мы сделали следующие вклады. (I) Обобщенная архитектура классификации транспортных средств на основе сверточной нейронной сети (CNN) представлена для повышения надежности систем классификации транспортных средств для интеллектуальных транспортных систем (ITS). в условиях плохой освещенности. (ii) Локальный набор данных, состоящий из 10 000 изображений, основанных на шести классах (например, автомобиль, фургон, грузовик, мотоцикл, рикша и мини-фургон), был собран из видео наблюдения за дорожным движением и вождения.Важно отметить, что эти классы уникальны по дизайну и форме, которые не охвачены в существующих наборах данных транспортных средств. (Iii) Модифицированная CNN была использована и обучена на наборе данных VeRi, содержащем 50000 изображений для шести классов транспортных средств, чтобы гарантировать обобщение сети. (iv) Наконец, было проведено обширное сравнительное исследование между предлагаемыми и существующими методами классификации транспортных средств, чтобы продемонстрировать эффективность предложенной сети классификации.
Остальная часть статьи организована следующим образом.В разделе 2 кратко обсуждаются существующие методы ручного и глубокого обучения для извлечения признаков и классификации транспортных средств. В разделе 3 была разработана сетевая архитектура вместе с предварительной обработкой и сбором наборов данных. Результаты и сравнительное исследование представлены в Разделе 4. Наконец, статья завершается в Разделе 5.
2. Сопутствующие работы
В соответствии с быстрым развитием искусственного интеллекта, классификация транспортных средств на основе зрения рассматривается как важный элемент в модуле восприятия беспилотных транспортных средств.В существующей исследовательской работе [5] классификация транспортных средств на основе видения подразделяется на две основные категории: (i) методологии, основанные на ручных функциях, и (ii) методологии, основанные на глубоких характеристиках.
На заре компьютерного зрения для интеллектуальных транспортных систем были предложены ручные методы классификации транспортных средств на основе характеристик. В связи с этим Ng et al. [15] предложили метод ручных функций на основе HOG-SVM для обучения классификатора SVM с использованием функций HOG с функцией ядра Гаусса.Предложенный классификатор был оценен на наборе данных из 2800 изображений видеонаблюдения, который классифицировал мотоциклы, автомобили и грузовики с точностью 92,3%. В другой исследовательской работе Chen et al. [16] представили метод классификации, который извлекает текстуры и особенности HOG и классифицирует транспортные средства с использованием нечеткого классификатора SVM. Представленный классификатор был оценен на наборе данных, состоящем из 2000 изображений, на которых предложенные системы классифицировали автомобили, фургоны и автобусы с 92.6% точность. Matos et al. [17] предложили комбинированный метод на основе двух нейронных сетей, встраивающий функции, то есть высоту, ширину и ограничивающие границы транспортных средств. В результате предлагаемый классификатор достиг 69% на наборе данных из 100 изображений. Кроме того, Cui et al. [18] предложили дескрипторы масштабно-инвариантного преобразования признаков (SIFT) и основанную на плохих словах (BoW) комбинированную модель для извлечения признаков и использовали SVM для классификации набора данных, состоящего из 340 изображений автомобилей, микроавтобусов и грузовиков.В результате показано, что предложенный классификатор достиг точности 90,2% на предоставленном наборе данных. Wen et al. [19] предложили быстро обучающийся классификатор транспортных средств на основе AdaBoost для разделения данных на классы транспортных средств и не транспортных средств. Более того, авторы предложили алгоритм извлечения хаар-подобных признаков для быстрого обучения классификаторов. Представленный классификатор был оценен на общедоступном наборе данных Caltech, в котором система достигла точности 92,89%.
Чтобы преодолеть проблемы созданных вручную классификаторов на основе признаков, были предложены системы на основе глубоких признаков.Донг и др. [20] представили метод полууправляемой классификации на основе CNN для классификации транспортных средств в реальном времени. Метод на основе разреженного лапласовского фильтра был разработан для извлечения относительной информации о транспортном средстве, а слой softmax обучен вычислять вероятность класса принадлежащего транспортного средства. Представленный метод был протестирован на наборе данных Bit-Vehicle и достиг точности 96,1% и 89,6% на дневных и ночных изображениях, соответственно. В другой исследовательской работе Wang et al. [21] представили метод классификации транспортных средств на основе Fast R – CNN для наблюдения за дорожным движением в режиме реального времени.Набор данных перекрестка, состоящий из 60 000 изображений, был собран и разделен на обучающие и проверенные данные, на которых предложенный метод достиг точности 80,051%. Cao et al. [22] предложили CNN и сквозную комбинированную архитектуру для классификации транспортных средств в ненадежной дорожной среде. Предлагаемая структура была оценена на наборе данных CompCars с учетом представлений, в котором предложенный классификатор достиг уровня точности 0,953. Чаухан и др. [23] предложили структуру классификации транспортных средств на основе CNN для классификации и подсчета транспортных средств на шоссе.Авторы утверждают, что предложенная структура достигла 75% MAP по собранному набору данных из 5562 видео с камер видеонаблюдения с дорожным движением. Jo et al. [24] предложили основанную на трансферном обучении структуру GoogLeNet для классификации транспортных средств в дорожном движении. Авторы показали, что представленный классификатор достиг точности 0,983 во время экспериментов с набором данных ILSVRC-2012. Kim et al. [25] предложили комбинированный метод извлечения признаков на основе PCANeT-HOG-HU, который предоставляется SVM в качестве входных данных для обучения модели классификации.Кроме того, авторы собрали набор данных, состоящий из 13700 изображений транспортных средств с учетом шести категорий транспортных средств (например, мотоциклов, фургонов, автомобилей, грузовиков, мини-автобусов и больших автобусов), извлеченных из видео наблюдения для обучения и тренировок. тестирование предложенной классификационной сети. Результаты показали, что предложенный облегченный классификатор достиг средней точности 98,34% на предоставленном наборе данных.
Хотя подходы, основанные на глубоких характеристиках, могут эффективно повысить точность классификации транспортных средств, эти методологии требуют огромного количества данных для достижения значительной точности в приложениях ITS в реальном времени [26–29].В последнее время в этой области были проведены обширные исследования; однако доступные общедоступные наборы данных для беспилотных транспортных средств / интеллектуальных транспортных систем включают современные типы транспортных средств, которые распространены в хорошо развитых странах. Следовательно, эти системы классификации неприменимы для интеллектуальных транспортных систем в азиатских странах, то есть в Пакистане, Индии, Бангладеш и Китае. Вышеупомянутые проблемы указывают на необходимость новой системы классификации транспортных средств вместе с набором данных, охватывающим обычные транспортные средства, т.е.е., традиционные грузовики, автобусы, легковые автомобили, рикши и мотоциклы азиатских стран.
3. Предлагаемый метод
Для решения вышеупомянутых проблем мы представляем новый набор данных транспортных средств, состоящий из 10 000 изображений, имеющих шесть классов, основанных на обычных транспортных средствах дорожного движения, как показано на рисунке 1. Для повышения производительности предложенная классификация в приложениях ITS в реальном времени, изначально существующие предварительно обученные AlexNet [30], VGG [31], GoogleNet [32], Inception-v3 [33] и ResNet [34] настраиваются на самостоятельно созданном наборе данных. чтобы получить окончательную сеть.На основе производительности этих моделей выбирается наиболее эффективная модель для точной настройки, чтобы повысить точность классификации сети. Для обеспечения обобщения предлагаемая сеть дополнительно дорабатывается на общедоступном наборе данных VeRi для обеспечения надежной работы в интеллектуальной транспортной системе различных регионов. Весь процесс кратко описан ниже на Рисунке 1.
3.1. Набор данных
В системах классификации на основе глубокого обучения набор данных является ключевым входом, который помогает алгоритмам изучать функции для выполнения прогнозов на основе полученной информации.В настоящее время, насколько нам известно, не существует общедоступного набора данных по общественным транспортным средствам, содержащего изображения обычных транспортных средств для решения проблем классификации. Например, наборы данных автомобилей CompCars и Standford содержат только классы современных автомобилей определенных регионов, которые не могут использоваться в системах классификации в реальном времени других регионов. Более того, предлагаемый набор данных отличается от существующих наборов данных с точки зрения функций и представлений. Кроме того, существующие системы классификации транспортных средств обучаются на относительно небольших наборах данных, содержащих ограниченные классы, что не очень хорошо работает в приложениях интеллектуальных транспортных систем в реальном времени [35].Чтобы решить эти проблемы, из разных регионов собираются видео наблюдения за дорогами и вождения для извлечения изображений транспортных средств. На основе анализа идентифицируются шесть общих классов дорожных транспортных средств, и набор данных формируется путем ручной маркировки с использованием инструмента редактирования Windows, как показано на рисунке 2. Набор данных включает 10000 изображений, которые были разделены на шесть классов (например, автомобиль, автобус, фургон, грузовик, мотоцикл и рикша), и каждый класс состоит из 1670 изображений.
3.2. Дополнение данных
Дополнение данных уравнениями — это самый простой и наиболее распространенный метод уменьшения переобучения в сети путем искусственного расширения набора данных с помощью методов преобразования с сохранением меток [36].Чтобы увеличить разнообразие нашего набора данных, мы использовали четыре различных типа увеличения данных: (i) размытие по Гауссу, (ii) вращение, (iii) горизонтальный поворот и (iv) гауссов шум, как показано на рисунке 3.
Мы использовали размытие по Гауссу с ядром 5 × 5, чтобы уменьшить высокочастотные зашумленные пиксели при сохранении низкой пространственной частоты за счет свертки ядра Гаусса по изображению размером 224 × 224. Во втором типе увеличения данных, то есть вращении, мы использовали 10-градусное вращение исходных изображений набора данных для создания разнообразного представления исходного набора данных.Третий тип увеличения данных включает генерацию набора данных путем горизонтального переворачивания исходного набора данных, тогда как мы использовали гауссовский шум в качестве четвертого типа увеличения данных, чтобы добавить некоторый случайный световой фактор в набор данных. Здесь важно отметить, что горизонтальное отражение, размытие по Гауссу и вращение применяются к набору обучающих данных, тогда как гауссов шум применяется к набору тестовых данных, как показано на рисунке 3. Основная цель применения увеличения данных на основе гауссова шума. к набору тестовых данных заключается в проверке эффективности предложенной классификационной сети на зашумленных данных.
3.3. Сверточная нейронная сеть (CNN) Model
CNN — это контролируемые сети с прямой связью, которые доказали значительную эффективность в приложениях для классификации крупномасштабных объектов. Основная структура CNN стимулируется ключевой зрительной корой головного мозга человека, которая наблюдает за обработкой визуальной информации [37]. В классификации изображений, по сравнению с традиционными методами извлечения элементов, созданными вручную, CNN могут автоматически извлекать обучаемые визуальные элементы из входных изображений крупномасштабного набора данных из классов для выполнения классификации.Одно из основных преимуществ CNN над традиционными методами классификации состоит в том, что в CNN представление функций и классификатор используются в одной и той же сети для устранения их зависимостей. Архитектура CNN в основном включает три типа слоев: (i) сверточные слои, (ii) уровни объединения и (iii) соединительные уровни, которые кратко обсуждаются ниже.
3.4. Сверточные слои
Сверточные слои считаются одним из наиболее важных уровней в CNN, которые состоят из определенного набора обучаемых фильтров.Фильтры пространственно меньше, чем входной размер, который скользит по входным данным изображения во время прямого прохода для создания двумерной карты активации. Карта активации указывает местоположение вместе с силой обнаруженных визуальных функций во входном изображении. Вычисление признаков сверточных слоев выполняется с использованием где — карта признаков n th l-слоя, это C-ядро, в то время как извлечение признаков из слоя-l, и — Характерные шаблоны, связанные со слоем-l. .
3.5. Уровни объединения
Уровень объединения обычно используется между последовательными слоями свертки структуры CNN, чтобы постепенно минимизировать размер пространственного представления для сокращения вычислений при сохранении полезной информации, что помогает контролировать переобучение во время процесса обучения. Важно отметить, что в существующих современных CNN используются два типа уровней объединения, то есть уровень объединения, имеющий размер фильтра = 2 и stride = 3, который называется объединением с перекрытием; другой слой объединения с размером фильтра = 2 имеет шаг 2.Кроме того, в существующих CNN также использовались некоторые другие типы объединения, то есть функции объединения по норме L2 и среднего пула. Функцию объединения можно выполнить, если — значение, извлеченное из l — 1 функций свертки, — вес карты и — значение смещения.
3,6. Уровень исключения
В CNN регуляризация является обычным способом избежать эффектов переобучения путем добавления значительного штрафа к используемой функции потерь. В связи с этим в нижнюю часть предлагаемой сети добавляется выпадающий слой, чтобы система не узнавала взаимозависимые веса функций.
3,7. Полностью связанный слой
В последнем разделе структуры CNN нейроны полностью связанного слоя связаны со всеми активациями предыдущего слоя, чтобы минимизировать размеры объекта. Последний уровень объединения CNN выравнивает сверточный уровень, который направляется полностью подключенным узлам сети. На следующем этапе для вычисления этих активаций применяется матричное умножение, за которым следует смещение коэффициента смещения. Полностью связанные нейроны можно вычислить, используя где — номер.нейронов выходного слоя — м характеристический паттерн слоя l-1, и — связанные веса.
3.8. Выбор модели CNN
При обучении с учителем сети на основе CNN продемонстрировали выдающуюся эффективность классификации крупномасштабных наборов данных [38–41]. Чтобы выбрать подходящую модель CNN, изначально мы доработали существующие современные модели AlexNet, Inception-v3, GoogleNet, VGG и ResNet в соответствии с классами собранного набора данных.На следующем этапе к этим моделям применяется трансферное обучение, чтобы оценить самостоятельно созданный набор данных о транспортных средствах. В результате ResNet продемонстрировала лучшую применимость с точки зрения конвергенции, времени отклика и точности, чем конкурирующие сети (кратко обсуждаемые в разделе 4). Следовательно, сетевая архитектура ResNet со 152 уровнями улучшается и используется в предлагаемой системе классификации транспортных средств.
4. Архитектура
В предлагаемой системе мы использовали архитектуру ResNet для выполнения классификации транспортных средств, одну из самых новаторских архитектур CNN, предложенных He et al.[34], который продемонстрировал выдающуюся производительность в распознавании и классификации объектов, заняв первое место в ILSVRC-15 с коэффициентом ошибок 3,57% [34]. В предыдущих сетях глубокого обучения увеличение уровней сети могло вызвать проблему исчезающего градиента, из-за которой модель не могла сойтись в лучшем виде. В сетевой архитектуре ResNet был введен новый метод, основанный на пропуске соединения, при котором каждый ввод с предыдущего уровня накапливается для вывода следующего уровня. Поскольку сеть уходит глубже, была принята конструкция узких мест, чтобы уменьшить временную сложность этой архитектуры CNN.Мы использовали подход трансфертного обучения, при котором модель, обученная для некоторой конкретной задачи, может быть настроена для выполнения другой задачи путем простого изучения новых весов. Этот подход может быть эффективным, если у нас меньше данных, которых недостаточно для обучения с нуля.
В этой работе мы развернули предварительно обученную сеть ResNet-152 для классификации транспортных средств, как показано в таблице 1. Глубина этой сети составляет 152 уровня, что было достигнуто заменой каждого двухуровневого блока в исходной сети ResNet на 3-х слойная блокировка узких мест [34].Входной слой этой сети принимает цветное изображение RGB размером 224 × 224 пикселей. В таблице 1 можно заметить, что структура представленного метода использует 64 ядра свертки 7 × 7 с шагом 2 в первом слое, а слой max-pooling 3 × 3 с шагом 2 используется для первый условный слой. Кроме того, сверточные блоки, то есть 2–5, организованы в виде трехуровневых блоков узких мест, имеющих несколько фильтров до 128, 256, 1024 и 2048, за которыми следует уровень объединения с адаптивным усреднением соответственно.Для выполнения трансферного обучения из сети был удален последний полностью связанный слой, который был предварительно обучен для выполнения классификации 1000 естественных категорий. Кроме того, мы добавляем новый блок классификации, состоящий из полностью связанного слоя, имеющего вектор признаков из 1024 нейронов, замененных слоем среднего пула и слоем ReLU, чтобы изучить новые визуальные особенности из набора обучающих данных. Внизу сети есть выпадающий слой для решения проблемы исчезающего градиента. На основе блока классификации вставляется новый полностью связанный уровень для выполнения шести типов классификации транспортных средств, где каждая единица в последнем уровне связана с шестью классами выходной вероятности с помощью функции softmax.Чтобы эти новые слои изучали визуальные функции более высокого уровня из набора данных, мы увеличили скорость обучения этих слоев по сравнению с предыдущими уровнями, скорость обучения которых остается неизменной. Мы установили размер партии и общее количество эпох равными 64 и 100 соответственно. Обучение сети выполнялось на тяжелой вычислительной машине, оснащенной RTX 2080TI, 11 ГБ DDR5 GPU, процессором core i9 — 9900k и 32 ГБ RAM, что заняло 8 часов для завершения обучения.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||
На следующем этапе предлагаемая сеть с разной глубиной 34, 50, 101 и 152, были оценены, и производительность этих сетей с точки зрения точности показана в таблице 3.
Обсуждение: Таблица 3 демонстрирует влияние глубины сети на производительность с точки зрения точности самостоятельно созданного набора данных о транспортных средствах.Видно, что производительность ResNet увеличивается с увеличением глубины сети. Следовательно, ResNet со 152 уровнями обеспечивает лучшую точность в общих классах набора данных по сравнению с ResNet с более низкими уровнями глубины. Подробные матрицы производительности ResNet со 152 уровнями показаны в Таблице 4.
5.4. Оценка модифицированной CNN на наборе данных VeRiОсновываясь на характеристиках настроенных сетей, показанных в таблице 4, предлагаемая классификационная сеть была точно настроена на общедоступном наборе данных VeRi [42, 43] для обеспечения обобщения. Набор данных, включающий 50000 изображений, был разделен на шесть классов, то есть автобус, MPV, пикап, седан, грузовик и фургон, распределенный между тестами и поездами с соотношением сторон 80: 20.Важно отметить, что эти классы выбираются на основе разброса данных. Матрицы показателей, представленные в таблице 5, раскрывают эффективность представленной системы классификации.
5.5. Сравнение с существующими современными методами классификации транспортных средствЭффективность представленного метода классификации сравнивается с традиционными методами классификации транспортных средств, чтобы доказать применимость предлагаемой системы с точки зрения классовой и средней точности, как показано в таблице 6. Существующие системы классификации [11, 44–46] были реализованы в MATLAB 2019a, который был обучен и оценен на самостоятельно созданном наборе данных о транспортных средствах.
. Предложенная система классификации была сравнена с существующими системами классификации транспортных средств [11, 44–46], чтобы подтвердить эффективность предложенной сети. Существующие сети были воспроизведены в предлагаемом наборе данных. Zhuo et al. [44] представили метод классификации транспортных средств на основе архитектуры GoogleNet с 22-уровневой глубинной сетью.С другой стороны, Gao et al. [45] представили основанную на AlexNet систему классификации транспортных средств, содержащую 5 сверточных и 3 полносвязных уровня в сети. Shivai et al. [46] представили самопредложенную систему классификации транспортных средств на основе CNN, имеющую 13 сверточных слоев и один полностью связанный слой, за которым следуют уровни максимального объединения и отбрасывания, тогда как Zakria et al. [11] представили систему классификации на основе начальной архитектуры. Хотя эти системы продемонстрировали хорошую производительность на своих наборах данных, одна из основных причин разницы в точности заключается в том, что эти существующие системы [11, 44–46] состоят из сетей небольшой глубины, которые не сходятся на крупномасштабных наборах данных. .Кроме того, существующие системы [11, 44–46] обучаются на ограниченных классах, не охватывающих обычные дорожные транспортные средства. В результате эти системы плохо работают в приложениях классификации в реальном времени. Более того, здесь важно упомянуть, что эти методы были обучены на несбалансированных наборах данных, что также является важным фактором в работе систем классификации транспортных средств в реальном времени. Следовательно, производительность этих существующих систем подвергается сомнению при оценке предлагаемого нами самостоятельно созданного сбалансированного набора данных, тогда как, с другой стороны, предлагаемая система классификации транспортных средств обучается на самостоятельно созданном наборе данных транспортных средств, состоящем из 10000 изображений, которые охватывают общие классов дорожного движения, а также доработаны в общедоступном наборе данных VeRi, который содержит 50 000 изображений, чтобы обеспечить обобщение предлагаемой системы классификации.Следовательно, предложенная нами система классификации достигла более высокой точности, чем существующие системы классификации транспортных средств. 6. ЗаключениеВ этой статье предлагается основанная на CNN система классификации транспортных средств для повышения эффективности интеллектуальных транспортных систем. Новый набор данных, содержащий 10 000 изображений шести классов, создан для обучения системе классификации. Первоначально пять современных CNN, то есть AlexNet, Inception-v3, GoogleNet, VGG и ResNet, обучаются на собранном наборе данных для проверки производительности.Основываясь на эффективности, ResNet со 152 уровнями улучшена путем добавления нового блока классификации в исходную сеть посредством передачи обучения. Для обеспечения обобщения предлагаемая система классификации доработана для общедоступного набора данных VeRi. Результаты показывают, что предложенная система классификации достигла более высокой точности, т. Е. 99,68% и 97,66%, на самостоятельно созданном наборе данных и наборе данных VeRi, соответственно, что значительно выше, чем у существующих современных систем классификации.В будущем мы стремимся расширить нашу работу по разработке детальной системы классификации для повышения эффективности предлагаемого метода в интеллектуальных транспортных системах. Доступность данныхВсе данные, использованные для подтверждения результатов исследования, доступны в рукописи. Раскрытие информацииМухаммад Атиф Батт и Асад Масуд Хаттак — первые совместные авторы этой работы. Конфликт интересовАвторы заявляют об отсутствии конфликта интересов. Вклад авторовКонцептуализация и методология исследования были выполнены Мухаммадом Атифом Баттом, Асадом Масудом Хаттаком и Сармадом Шафиком. Техническая и теоретическая основа была подготовлена Сармадом Шафиком и Саймой Абид. Технический обзор и улучшения были выполнены Ахташамом Саджидом, Мухаммадом Вакасом Аюбом, Баширом Хаятом и Авайсом Аднаном. Общую техническую поддержку, руководство и администрирование проекта осуществляли Мухаммад Атиф Батт, Асад Масуд Хаттак, Сайма Абид и Ки-Иль Ким. БлагодарностиЭта исследовательская работа была поддержана Фондом поощрения исследований Университета Зайда № R19096. Проект Python по распознаванию дорожных знаков с точностью 95% с использованием CNN и KerasБесплатный курс Python с 25 проектами в реальном времени. Начни сейчас! Проект Python — Распознавание дорожных знаков Вы, должно быть, слышали о беспилотных автомобилях, в которых пассажир может полностью полагаться на автомобиль во время путешествия.Но для достижения 5-го уровня автономности транспортным средствам необходимо понимать и соблюдать все правила дорожного движения. В мире искусственного интеллекта и развития технологий многие исследователи и крупные компании, такие как Tesla, Uber, Google, Mercedes-Benz, Toyota, Ford, Audi и т. Д., Работают над автономными транспортными средствами и беспилотными автомобилями. Таким образом, для достижения точности в этой технологии транспортные средства должны уметь интерпретировать дорожные знаки и принимать соответствующие решения. Это восьмой проект DataFlair из 20 проектов Python.Рекомендую добавить в закладки предыдущие проекты:
Что такое распознавание дорожных знаков?Существует несколько различных типов дорожных знаков, таких как ограничение скорости, запрет на въезд, светофоры, поворот налево или направо, переход детей, запрещение проезда тяжелых транспортных средств и т. Д.Классификация дорожных знаков — это процесс определения того, к какому классу принадлежит дорожный знак. Распознавание дорожных знаков — о проекте PythonВ этом примере проекта Python мы построим модель глубокой нейронной сети, которая может классифицировать дорожные знаки, присутствующие на изображении, по различным категориям. С помощью этой модели мы можем читать и понимать дорожные знаки, что является очень важной задачей для всех автономных транспортных средств. Набор данных проекта PythonДля этого проекта мы используем общедоступный набор данных, доступный на Kaggle: Набор данных дорожных знаков Набор данных содержит более 50 000 изображений различных дорожных знаков.Далее он подразделяется на 43 различных класса. Набор данных весьма разнообразен: некоторые классы содержат много изображений, а некоторые классы — несколько изображений. Размер набора данных составляет около 300 МБ. В наборе данных есть папка поезда, которая содержит изображения внутри каждого класса, и тестовая папка, которую мы будем использовать для тестирования нашей модели. Предварительные требованияЭтот проект требует предварительного знания Keras, Matplotlib, Scikit-learn, Pandas, PIL и классификации изображений. Чтобы установить необходимые пакеты, используемые для этого проекта Python по науке о данных, введите в терминале следующую команду: pip install tenorflow keras sklearn matplotlib pandas pil Хотите стать профессионалом в Python? Ознакомьтесь с 270+ бесплатными учебными пособиями по Python Шаги по созданию проекта PythonЧтобы начать работу с проектом, загрузите и распакуйте файл по этой ссылке — Zip-файл распознавания дорожных знаков И файлы распаковать в папку так, чтобы у вас были шлейф, тест и метапапка. Создайте файл сценария Python и назовите его traffic_signs.py в папке проекта. Наш подход к построению этой модели классификации дорожных знаков состоит из четырех этапов:
Шаг 1. Изучите набор данных Наша папка «train» содержит 43 папки, каждая из которых представляет отдельный класс.Диапазон значений папки от 0 до 42. С помощью модуля ОС мы перебираем все классы и добавляем изображения и их соответствующие метки в список данных и меток. Библиотека PIL используется для открытия содержимого изображения в массиве. Наконец, мы сохранили все изображения и их метки в списки (данные и метки). Нам нужно преобразовать список в массивы numpy для подачи в модель. Форма данных — (39209, 30, 30, 3), что означает, что имеется 39 209 изображений размером 30 × 30 пикселей, а последние 3 означают, что данные содержат цветные изображения (значение RGB). В пакете sklearn мы используем метод train_test_split () для разделения данных обучения и тестирования. Из пакета keras.utils мы используем метод to_categorical для преобразования меток, присутствующих в y_train и t_test, в горячую кодировку. Шаг 2: Постройте модель CNN Чтобы классифицировать изображения по соответствующим категориям, мы построим модель CNN ( Сверточная нейронная сеть ). CNN лучше всего подходит для целей классификации изображений. Архитектура нашей модели:
Мы компилируем модель с помощью оптимизатора Adam, который работает хорошо, и потери составляют «category_crossentropy», потому что у нас есть несколько классов для категоризации. Этапы 3. Обучить и проверить модель После построения архитектуры модели мы обучаем модель с помощью model.fit (). Я пробовал использовать размер партии 32 и 64. Наша модель показала лучшие результаты при размере партии 64. И через 15 эпох точность была стабильной. Наша модель получила точность 95% на обучающем наборе данных. С помощью matplotlib мы строим график точности и потерь. Точность нанесения Графики точности и потерь Шаг 4. Протестируйте нашу модель с помощью тестового набора данных Наш набор данных содержит тестовую папку, а в файле test.csv у нас есть детали, относящиеся к пути к изображению и их соответствующим меткам классов. Мы извлекаем путь к изображению и метки с помощью панд. Затем, чтобы предсказать модель, мы должны изменить размер наших изображений до 30 × 30 пикселей и создать массив, содержащий все данные изображения.Из sklearn.metrics мы импортировали precision_score и наблюдали, как наша модель предсказывает фактические метки. В этой модели мы достигли точности 95%. В конце мы собираемся сохранить модель, которую мы обучили с помощью функции Keras model.save (). model.save (‘traffic_classifier.h5’) Полный исходный код: импортировать numpy как np
импортировать панд как pd
импортировать matplotlib.pyplot как plt
импорт cv2
импортировать тензорный поток как tf
из PIL импорта изображения
импорт ОС
из склеарна.model_selection импорт train_test_split
from keras.utils import to_categorical
из keras.models import Sequential, load_model
from keras.layers импортировать Conv2D, MaxPool2D, Dense, Flatten, Dropout
данные = []
label = []
классы = 43
cur_path = os.getcwd ()
# Получение изображений и их этикеток
для i в диапазоне (классы):
путь = os.path.join (cur_path, 'поезд', str (i))
images = os.listdir (путь)
для изображений в:
пытаться:
image = Изображение.открытый (путь + '\\' + a)
image = image.resize ((30,30))
изображение = np.array (изображение)
#sim = Image.fromarray (изображение)
data.append (изображение)
label.append (i)
Кроме:
print ("Ошибка загрузки изображения")
# Преобразование списков в массивы numpy
data = np.array (данные)
метки = np.array (метки)
печать (data.shape, labels.shape)
# Разделение набора данных для обучения и тестирования
X_train, X_test, y_train, y_test = train_test_split (данные, метки, test_size = 0.2, random_state = 42)
печать (X_train.shape, X_test.shape, y_train.shape, y_test.shape)
# Преобразование этикеток в одну горячую кодировку
y_train = to_categorical (y_train, 43)
y_test = to_categorical (y_test, 43)
# Построение модели
model = Последовательный ()
model.add (Conv2D (фильтры = 32, размер ядра = (5,5), активация = 'relu', input_shape = X_train.shape [1:]))
model.add (Conv2D (фильтры = 32, размер ядра = (5,5), активация = 'relu'))
model.add (MaxPool2D (размер_пул = (2, 2)))
модель.добавить (выпадение (коэффициент = 0,25))
model.add (Conv2D (фильтры = 64, размер_ядра = (3, 3), активация = 'relu'))
model.add (Conv2D (фильтры = 64, размер_ядра = (3, 3), активация = 'relu'))
model.add (MaxPool2D (размер_пул = (2, 2)))
model.add (Отсев (коэффициент = 0,25))
model.add (Сглаживание ())
model.add (Плотный (256, активация = 'relu'))
model.add (Отсев (коэффициент = 0,5))
model.add (Плотный (43, активация = 'softmax'))
# Составление модели
model.compile (loss = 'category_crossentropy', optimizer = 'adam', metrics = ['precision'])
эпох = 15
история = модель.fit (X_train, y_train, batch_size = 32, эпохи = эпохи, validation_data = (X_test, y_test))
model.save ("my_model.h5")
# построение графиков для точности
plt.figure (0)
plt.plot (history.history ['точность'], label = 'точность обучения')
plt.plot (history.history ['val_accuracy'], label = 'val precision')
plt.title ('Точность')
plt.xlabel ('эпохи')
plt.ylabel ('точность')
plt.legend ()
plt.show ()
plt.figure (1)
plt.plot (history.history ['потеря'], label = 'потеря обучения')
plt.сюжет (history.history ['val_loss'], label = 'val loss')
plt.title ('Потеря')
plt.xlabel ('эпохи')
plt.ylabel ('потеря')
plt.legend ()
plt.show ()
# проверка точности на тестовом наборе данных
из sklearn.metrics импортировать precision_score
y_test = pd.read_csv ('Test.csv')
label = y_test ["ClassId"]. значения
imgs = y_test ["Путь"]. значения
данные = []
для img в imgs:
image = Image.open (img)
image = image.resize ((30,30))
данные.добавить (np.array (изображение))
X_test = np.array (данные)
pred = model.predict_classes (X_test)
# Точность с тестовыми данными
из sklearn.metrics импортировать precision_score
печать (оценка_точности (метки, пред))
model.save (‘traffic_classifier.h5’) ПОДОЖДИТЕ! Вы проверили наш последний учебник по OpenCV и компьютерному зрению Графический интерфейс классификатора дорожных знаковТеперь мы собираемся создать графический пользовательский интерфейс для нашего классификатора дорожных знаков с помощью Tkinter.Tkinter — это набор инструментов с графическим интерфейсом в стандартной библиотеке Python. Создайте новый файл в папке проекта и скопируйте приведенный ниже код. Сохраните его как gui.py, и вы можете запустить код, набрав python gui.py в командной строке. В этом файле мы сначала загрузили обученную модель «traffic_classifier.h5» с помощью Keras. Затем мы создаем графический интерфейс для загрузки изображения, и для классификации используется кнопка, вызывающая функцию classify (). Функция classify () преобразует изображение в размер формы (1, 30, 30, 3).Это связано с тем, что для прогнозирования дорожного знака мы должны предоставить тот же размер, который мы использовали при построении модели. Затем мы прогнозируем класс, model.predict_classes (image) возвращает нам число между (0-42), которое представляет класс, к которому он принадлежит. Мы используем словарь, чтобы получить информацию о классе. Вот код файла gui.py. Код: import tkinter as tk
из диалогового окна файла импорта tkinter
из tkinter import *
из PIL импортировать ImageTk, Image
import numpy
# загрузить обученную модель для классификации знака
из кераса.модели импортировать load_model
модель = load_model ('traffic_classifier.h5')
#dictionary для обозначения всех классов дорожных знаков.
classes = {1: 'Ограничение скорости (20 км / ч)',
2: «Ограничение скорости (30 км / ч)»,
3: «Ограничение скорости (50 км / ч)»,
4: «Ограничение скорости (60 км / ч)»,
5: «Ограничение скорости (70 км / ч)»,
6: «Ограничение скорости (80 км / ч)»,
7: «Конец ограничения скорости (80 км / ч)»,
8: «Ограничение скорости (100 км / ч)»,
9: «Ограничение скорости (120 км / ч)»,
10: «Нет прохождения»,
11: «Нет прохождения более 3.5 тонн »,
12: "Полоса отвода на перекрестке",
13: "Приоритетная дорога",
14: 'Урожайность',
15: "Стоп",
16: «Нет транспортных средств»,
17: «Veh> 3,5 тонны запрещены»,
18: «Вход запрещен»,
19: 'Общее предостережение',
20: 'Опасный поворот налево',
21: 'Опасный поворот вправо',
22: 'Двойная кривая',
23: 'Неровная дорога',
24: 'Скользкая дорога',
25: "Дорога сужается справа",
26: «Дорожные работы»,
27: "Светофоры",
28: "Пешеходы",
29: 'Детский переход',
30: «Велосипедный переход»,
31: 'Остерегайтесь льда / снега',
32: 'Переход диких животных',
33: «Конечная скорость + ограничения прохождения»,
34: "Поверните направо",
35: "Поверните налево",
36: 'Только вперед',
37: "Иди прямо или направо",
38: "Идите прямо или налево",
39: "Держись правее",
40: "Держись левее",
41: "Обязательное движение с круговым движением",
42: 'Конец непроходимости',
43: 'End no pass veh> 3.5 тонн »}
#initialise GUI
top = tk.Tk ()
top.geometry ('800x600')
top.title ('Классификация дорожных знаков')
top.configure (background = '# CDCDCD')
label = Label (вверху, background = '# CDCDCD', font = ('arial', 15, 'bold'))
sign_image = Этикетка (вверху)
def classify (путь к файлу):
global label_packed
image = Image.open (путь к файлу)
image = image.resize ((30,30))
image = numpy.expand_dims (изображение, ось = 0)
image = numpy.array (изображение)
пред = модель.pred_classes ([изображение]) [0]
знак = классы [пред + 1]
печать (подпись)
label.configure (передний план = '# 011638', текст = знак)
def show_classify_button (путь к файлу):
classify_b = Кнопка (вверху, text = "Классифицировать изображение", command = lambda: classify (file_path), padx = 10, pady = 5)
classify_b.configure (background = '# 364156', foreground = 'white', font = ('arial', 10, 'bold'))
classify_b.place (relx = 0,79, rely = 0,46)
def upload_image ():
пытаться:
file_path = filedialog.askopenfilename ()
uploaded = Image.open (путь к файлу)
uploaded.thumbnail (((top.winfo_width () / 2.25), (top.winfo_height () / 2.25)))
im = ImageTk.PhotoImage (загружено)
sign_image.configure (изображение = им)
sign_image.image = im
label.configure (текст = '')
show_classify_button (путь к файлу)
Кроме:
проходить
upload = Button (вверху, text = "Загрузить изображение", command = upload_image, padx = 10, pady = 5)
upload.configure (background = '# 364156', foreground = 'white', font = ('arial', 10, 'bold'))
загрузить.пачка (сторона = НИЖНЯЯ, подушка = 50)
sign_image.pack (side = BOTTOM, expand = True)
label.pack (side = BOTTOM, expand = True)
heading = Label (вверху, text = "Знай свой дорожный знак", pady = 20, font = ('arial', 20, 'bold'))
heading.configure (background = '# CDCDCD', foreground = '# 364156')
heading.pack ()
top.mainloop () Выход: СводкаВ этом проекте Python с исходным кодом мы успешно классифицировали классификатор дорожных знаков с точностью 95%, а также визуализировали, как наша точность и потери меняются со временем, что довольно хорошо для простой модели CNN. Пора стать следующим разработчиком Python Запишитесь на онлайн-курс Python в DataFlair прямо сейчас! Если вам понравился проект Python по классификации дорожных знаков, поделитесь им в социальных сетях с друзьями и коллегами. Чтобы увидеть больше подобных проектов, продолжайте посещать DataFlair. Ваши 15 секунд побудят нас работать еще усерднее Система обнаружения и подсчета транспортных средств на основе Vision с использованием глубокого обучения на дорогах | European Transport Research ReviewОбнаружение транспортных средств и статистика в видеосценах наблюдения за шоссе имеют большое значение для интеллектуального управления движением и контроля на шоссе.Благодаря популярной установке камер наблюдения за дорожным движением для анализа была получена обширная база данных видеозаписей дорожного движения. Как правило, при большом угле обзора можно рассмотреть более удаленную поверхность дороги. Размер объекта транспортного средства сильно меняется при таком угле обзора, а точность обнаружения небольшого объекта вдали от дороги невысока. Перед лицом сложных сцен с камерой важно эффективно решать вышеуказанные проблемы и применять их в дальнейшем. В этой статье мы сосредотачиваемся на вышеуказанных проблемах, чтобы предложить жизнеспособное решение, и применяем результаты обнаружения транспортных средств для отслеживания нескольких объектов и подсчета транспортных средств. Связанные работы по обнаружению транспортных средствВ настоящее время обнаружение транспортных средств на основе технического зрения разделено на традиционные методы машинного зрения и сложные методы глубокого обучения. Традиционные методы машинного зрения используют движение транспортного средства, чтобы отделить его от фиксированного фонового изображения. Этот метод можно разделить на три категории [1]: метод использования вычитания фона [2], метод использования непрерывной разности видеокадров [3] и метод использования оптического потока [4].Используя метод разности видеокадров, дисперсия вычисляется в соответствии со значениями пикселей двух или трех последовательных видеокадров. Кроме того, движущаяся область переднего плана отделяется порогом [3]. Используя этот метод и подавляя шум, можно также обнаружить остановку транспортного средства [5]. Когда фоновое изображение в видео фиксировано, фоновая информация используется для создания модели фона [5]. Затем изображение каждого кадра сравнивается с моделью фона, и движущийся объект также может быть сегментирован.Метод использования оптического потока позволяет обнаруживать область движения в видео. Созданное поле оптического потока представляет направление движения и скорость каждого пикселя [4]. Широко использовались методы обнаружения транспортных средств с использованием функций транспортных средств, такие как методы масштабно-инвариантного преобразования элементов (SIFT) и ускоренных устойчивых элементов (SURF). Например, 3D-модели использовались для выполнения задач по обнаружению и классификации транспортных средств [6]. Используя корреляционные кривые трехмерных выступов на внешней поверхности транспортного средства [7], транспортные средства разделены на три категории: легковые автомобили, внедорожники и микроавтобусы. Использование глубоких сверточных сетей (CNN) привело к поразительным успехам в области обнаружения транспортных средств. CNN обладают сильной способностью изучать особенности изображения и могут выполнять множество связанных задач, таких как классификация и регрессия ограничивающего прямоугольника [8]. Методы обнаружения в целом можно разделить на две категории. Двухэтапный метод генерирует блок-кандидат объекта с помощью различных алгоритмов, а затем классифицирует объект сверточной нейронной сетью. Одноэтапный метод не генерирует блок-кандидат, а напрямую преобразует проблему позиционирования ограничивающего прямоугольника объекта в проблему регрессии для обработки.В двухэтапном методе Region-CNN (R-CNN) [9] использует выборочный поиск области [10] в изображении. Изображение, вводимое в сверточную сеть, должно быть фиксированного размера, а более глубокая структура сети требует длительного времени обучения и потребляет большой объем запоминающей памяти. Основываясь на идее сопоставления пространственных пирамид, SPP NET [11] позволяет сети вводить изображения различных размеров и иметь фиксированные выходные данные. R-FCN, FPN и Mask RCNN по-разному улучшили методы извлечения признаков, выбора признаков и возможности классификации сверточных сетей.Среди одноэтапных методов наиболее важными являются фреймворки Single Shot Multibox Detector (SSD) [12] и You Only Look Once (YOLO) [13]. MutiBox [14], сеть предложений регионов (RPN) и методы многомасштабного представления используются в SSD, который использует набор якорных ящиков по умолчанию с различными соотношениями сторон для более точного позиционирования объекта. В отличие от SSD, сеть YOLO [13] делит изображение на фиксированное количество сеток. Каждая сетка отвечает за прогнозирование объектов, центральные точки которых находятся внутри сетки.YOLOv2 [15] добавил слой BN (Batch Normalization), который заставляет сеть нормализовать входные данные каждого уровня и ускорять скорость сходимости сети. YOLOv2 использует многомасштабный метод обучения для случайного выбора нового размера изображения для каждых десяти пакетов. Наше средство обнаружения транспортных средств использует сеть YOLOv3 [16]. На основе YOLOv2, YOLOv3 использует логистическую регрессию для категории объектов. Метод потери категории — это кросс-энтропийная потеря двух классов, который может обрабатывать несколько проблем с метками для одного и того же объекта.Более того, логистическая регрессия используется для регрессии достоверности ящика, чтобы определить, превышает ли долговая расписка априорного ящика и фактического ящика 0,5. Если условию удовлетворяет более одного приоритетного блока, берется только самый большой предшествующий блок долгового обязательства. В окончательном предсказании объекта YOLOv3 использует три разных шкалы для предсказания объекта на изображении. Традиционный метод машинного зрения имеет более высокую скорость при обнаружении транспортного средства, но не дает хорошего результата, когда изображение изменяется по яркости, есть периодическое движение на заднем плане, а также там, где есть медленно движущиеся транспортные средства или сложные сцены.Advanced CNN добилась хороших результатов в обнаружении объектов; однако CNN чувствительна к изменениям масштаба при обнаружении объектов [17, 18]. В одноэтапном методе сетки используются для прогнозирования объектов, а пространственные ограничения сетки не позволяют добиться более высокой точности при двухэтапном подходе, особенно для небольших объектов. Двухэтапный метод использует объединение областей интересов для сегментации областей-кандидатов на блоки в соответствии с заданными параметрами, и если область-кандидат меньше, чем размер данных параметров, область-кандидат дополняется до размера данных параметров.Таким образом, характерная структура небольшого объекта разрушается и точность его обнаружения невысока. Существующие методы не различают, принадлежат ли большие и маленькие объекты к одной и той же категории. Тот же метод используется для работы с одним и тем же типом объекта, что также приведет к неточному обнаружению. Использование пирамид изображений или многомасштабных входных изображений может решить вышеупомянутые проблемы, хотя требования к вычислениям велики. Исследования по обнаружению транспортных средств в ЕвропеМетоды обнаружения транспортных средств на основе технического зрения в Европе дали огромные результаты.В [19] между участками «Hofolding» и «Weyern» автомагистрали A8 в Мюнхене, Германия, метод многомерного обнаружения изменений (MAD) [20] использовался для обнаружения смены двух изображений с коротким временным лагом. Движущиеся автомобили выделяются на изображении изменений, которое используется для оценки плотности транспортных средств на дороге. В [21] при использовании автомагистралей A95 и A96 возле Мюнхена, A4 возле Дрездена и «Миттлере Ринг» в Мюнхене в качестве тестовых сред алгоритм Canny edge [22] применяется к изображению дороги и гистограмме рассчитывается крутизна кромки.Затем, используя алгоритм k-средних, статистика крутизны кромки разделяется на три части, и на основе крутизны определяется замкнутая модель транспортного средства. Подход, основанный на контрасте, был использован для создания цветовой модели для выявления и удаления теневых областей транспортного средства [23], что устраняет помехи, вызванные движением в сцене. После устранения теневой области эффективность обнаружения транспортных средств может быть значительно улучшена. Эксперимент [23] проводился на автомагистралях Италии и Франции. Характеристики HOG и Хаара сравнивались в [24], и эти две функции были объединены для создания детектора для обнаружения транспортных средств, который был протестирован на французских изображениях транспортных средств.Однако, когда вышеупомянутый метод используется для обнаружения транспортного средства, тип транспортного средства не может быть обнаружен. Кроме того, когда освещение недостаточное, трудно выделить край транспортного средства или обнаружить движущийся автомобиль, что вызывает проблемы с низкой точностью обнаружения транспортного средства и влияет на результаты обнаружения для дальнейшего использования. Фотографии углов обзора с высоты птичьего полета использовались в [19, 20], но не могут четко передать характеристики каждой машины и привести к ложному обнаружению транспортных средств. Тем не менее, с развитием технологии глубокого обучения обнаружение транспортных средств на основе CNN было успешно применено в Европе.В [25] Fast R-CNN использовался для обнаружения транспортных средств в местах дорожного движения в городе Карлсруэ, Германия. Fast R-CNN использует стратегию выборочного поиска для поиска всех кадров-кандидатов, что требует значительных затрат времени, а скорость обнаружения транспортного средства мала. Короче говоря, исследования в области обнаружения транспортных средств на основе технического зрения все еще продолжаются, и основные проблемы постепенно решаются, что внесет значительный вклад в развитие европейского дорожного строительства. Связанные работы по слежению за транспортными средствамиРасширенные приложения для обнаружения транспортных средств, такие как слежение за несколькими объектами, также являются важной задачей ИТС [26].Большинство методов отслеживания нескольких объектов используют отслеживание на основе обнаружения (DBT) и отслеживание без обнаружения (DFT) для инициализации объекта. Метод DBT использует фоновое моделирование для обнаружения движущихся объектов в видеокадрах перед отслеживанием. Метод DFT должен инициализировать объект отслеживания, но не может обрабатывать добавление новых объектов и удаление старых объектов. Алгоритм отслеживания нескольких объектов должен учитывать сходство внутрикадровых объектов и связанную с этим проблему межкадровых объектов.Сходство внутрикадровых объектов может использовать нормализованная взаимная корреляция (NCC). Расстояние Бхаттачарьи используется для вычисления расстояния цветовой гистограммы между объектами, например, в [27]. Когда межкадровые объекты связаны, необходимо определить, что объект может появляться только на одной дорожке и что одна дорожка может соответствовать только одному объекту. В настоящее время исключение на уровне обнаружения или исключение на уровне траектории может решить эту проблему. Чтобы решить проблемы, вызванные изменением масштаба и изменением освещенности движущихся объектов, [28] использовала характерные точки SIFT для отслеживания объектов, хотя это происходит медленно.Для использования в данной работе предлагается алгоритм обнаружения характерных точек ORB [29]. ORB может получить лучшие точки извлечения на значительно более высокой скорости, чем SIFT. Таким образом, можно считать, что метод обнаружения объектов транспортного средства был перенесен из исследования традиционных методов в методы глубоких сверточных сетей. Более того, существует меньше общедоступных наборов данных для конкретных сцен дорожного движения. Чувствительность сверточных нейронных сетей к изменениям масштаба делает обнаружение мелких объектов неточным.При использовании камер видеонаблюдения на шоссе сложно проводить слежение за несколькими объектами и последующий анализ трафика. Таким образом, наш вклад включает в себя следующее: 1. Создан крупномасштабный набор данных высокой четкости для дорожных транспортных средств, который может предоставить множество различных транспортных объектов, полностью аннотированных в различных сценах, снятых камерами наблюдения на шоссе. Набор данных можно использовать для оценки эффективности многих алгоритмов обнаружения транспортных средств при изменении масштаба транспортных средств. 2. Для повышения точности обнаружения транспортных средств используется метод обнаружения мелких объектов в сценах с шоссе. Площадь поверхности дороги шоссе выделяется и делится на удаленную область и ближнюю область, которые помещаются в сверточную сеть для обнаружения транспортных средств. 3. Предлагается метод слежения за множеством объектов и анализа траектории для сцен с шоссе. Характерные точки объекта обнаружения извлекаются и сопоставляются алгоритмом ORB, а линия обнаружения дороги определяется для подсчета направления движения транспортного средства и транспортного потока. Это исследование будет описано в следующих разделах. В разделе «Набор данных транспортного средства» представлен набор данных транспортного средства, используемый в этом документе. Раздел «Структура системы» знакомит с общим процессом предлагаемой системы. В разделе «Методы» подробно описана наша стратегия. В разделе «Результаты и обсуждение» представлены эксперименты и связанный с ними анализ. Раздел «Выводы» подводит итог всей статье. Обзор классификации транспортных средств и потенциального использования интеллектуальных методов с использованием транспортных средствРефератКлассификация транспортных средств (VC) является базовым подходом в интеллектуальной транспортной системе и широко используется в различных приложениях, таких как автоматизированный мониторинг транспортных потоков. системы парковки и обеспечение безопасности.Существующие методы VC обычно имеют локальный характер и могут классифицировать транспортные средства, если целевое транспортное средство проходит через фиксированные датчики, проходит через зону мониторинга ближнего действия или является гибридом этих методов. Использование глобальной системы позиционирования (GPS) может предоставить надежную глобальную информацию о кинематических характеристиках; однако в методах отсутствует информация о физических параметрах транспортных средств. Кроме того, согласно имеющимся исследованиям, смартфон или портативные устройства GPS используются в качестве источника кинематических характеристик эвакуационного транспортного средства, которые не являются надежными для отслеживания и классификации транспортных средств в реальном времени.Чтобы справиться с ограничениями доступных методов VC, исследуются потенциальные глобальные методы для определения физических и кинематических характеристик в состояниях реального времени. Автомобильные специальные сети (VANET) — это сети интеллектуальных взаимосвязанных транспортных средств, которые могут предоставлять такие параметры трафика, как тип, скорость, направление и положение каждого транспортного средства в режиме реального времени. В этом исследовании VANET представлены для VC, а их возможности, которые могут быть использованы для вышеуказанной цели, представлены из доступной литературы.Насколько известно авторам, это первое исследование, в котором представлены сети VANET для венчурных инвестиций. Наконец, проводится сравнение, которое показывает, что сети VANET превосходят традиционные методы. Ключевые слова: классификация транспортных средств, специальные автомобильные сети, вес в движении, глобальная система позиционирования, обнаружение света и дальность, ультразвуковой, радар, видеоизображения 1. ВведениеМетоды, используемые в транспортной инженерии для получения Параметры транспортных средств в их движущемся состоянии определяются термином классификации транспортных средств (VC).VC — это модуль, используемый для разделения транспортных средств на несколько различных классов. В литературе доступны различные определения VC. представляет собой краткое изложение существующих определений для дальнейшего разъяснения этого явления. VC является фундаментальной частью интеллектуальных транспортных систем и широко используется в различных приложениях, таких как мониторинг транспортного потока [1,2], автоматизированные системы парковки [3,4], обеспечение безопасности [5] и даже мониторинг состояния конструкций [6] , 7,8,9,10]. В этих методах транспортные средства могут быть обнаружены путем прохождения через фиксированные датчики [11,12], проезда через зоны наблюдения [13,14], глобальное покрытие [15,16] или гибрид этих методов [12,17].С помощью датчиков и детекторов может быть извлечена разнообразная информация, которая может включать количество транспортных средств, форму, то есть высоту, ширину и длину [14,18], скорость [19,20], вес оси и расстояние между ними [21,22] , ускорение / замедление [23], марка и модель [24,25,26] и номерной знак [27,28]. Таблица 1Краткое изложение существующих определений явления классификации транспортных средств (ВК).
Ручной подсчет — самый простой метод VC. Однако эти методы требуют много времени и подвержены ошибкам. Методы, основанные на визуальном представлении, являются наиболее широко изучаемыми и используемыми подходами для мониторинга виртуальных каналов и трафика. Методы на основе зрения извлекают визуальные атрибуты, такие как цвет, линии и текстурные узоры, как функции на видео для обнаружения и отслеживания транспортных средств [37]. VC на основе Vision включает в себя несколько этапов, таких как сегментация изображения, извлечение признаков, обучение и распознавание образов.Основная цель сегментации изображения — выделить интересующий объект из фона на основе некоторых полезных сигналов, таких как цвет пикселя [38,39], края — полученные из градиентов изображения [40] — и интенсивность пикселей (уровень серого) [41 , 42]. Данные обучения используются на этапах распознавания образов и классификации. При использовании методов, основанных на видении, необходимо соблюдать особую осторожность, чтобы уважать конфиденциальность и анонимность вовлеченных лиц [23]. Всесторонний обзор методов, основанных на видении, был проведен Wang et al.[43]. Пневматические трубчатые детекторы для ВК были впервые использованы в 1920 году и используются сегодня для краткосрочного сбора данных о транспортных средствах [44]. Пневматическая трубка может определять количество осей и расстояние между осями движущегося транспортного средства. Этот метод не подходит для высокоскоростных дорог с большим объемом транспорта. Детектор магнитной петли — это технология, которая использовалась для ВК в последние десятилетия. Магнитная петля может использоваться для VC, определяя длину транспортного средства [45,46]. Скорость автомобиля можно напрямую измерить с помощью двухконтурных детекторов [47, 48].Детекторы цикла мыслей относительно недороги и выполняют автоматическую классификацию, но они не очень хорошо себя чувствуют в условиях высокой загруженности [23]. Пьезоэлектрические датчики используются для определения веса автомобиля и конфигурации оси [19,49]. Пьезоэлектрические детекторы используются отдельно или в сочетании с системами измерения веса в движении (WIM). Однако недостатком пьезоэлектрических датчиков является их чувствительность к скорости движения автомобиля и температуре дорожного покрытия. Радиолокационные датчики — популярный инструмент для классификации по габаритам автомобиля (длина, размер, высота и т. Д.).) [50,51]. Хотя радарные датчики менее чувствительны к изменению окружающей среды по сравнению с другими методами, они не подходят для плотных транспортных заторов [23]. Инфракрасные датчики измеряют отраженный инфракрасный свет каждым транспортным средством и сравнивают данные с базой данных, чтобы найти наиболее подходящий профиль [52,53,54]. Инфракрасные датчики чувствительны к факторам окружающей среды. Акустические датчики используют независимые от скорости акустические сигнатуры для определения классов транспортных средств [55]. WIM — важный источник данных о дорожном движении и классификации транспортных средств.Архитектура WIM состоит из двух частей: моделирования и оценки. Система WIM [56] была разработана для измерения данных о массе транспортных средств. WIM — это система, оснащенная различными датчиками, цифровыми камерами и компьютерами, которая устанавливается на мостовой конструкции. WIM измеряет динамическую осевую нагрузку движущихся транспортных средств, чтобы получить данные о массе транспортного средства. В WIM используются методы множественного обнаружения для точной классификации транспортных средств [57,58]. Однако WIM — это устройство для измерения веса с фиксированным местоположением, которое измеряет нагрузку на ось, когда ее колеса проходят над датчиками.С другой стороны, WIM-система стоит дорого и нецелесообразна для местных дорог. Показано, что методы, основанные на датчиках фиксированного местоположения, могут предоставить ценную информацию в сочетании с другими методами [59,60]. Методы, основанные на визуальном представлении, могут предоставить информацию о марке и марке транспортного средства, которая может быть использована для извлечения другой информации, такой как полная масса и характеристики оси [61,62]. Помимо состояния мобильности транспортных средств, в зоне обзора камеры также можно было получить скорость, ускорение и направление [59,63].Исследования утверждают, что использование системы позиционирования на основе GPS является наиболее надежным способом извлечения информации о местоположении и движении; однако в этих методах отсутствует информация о физических параметрах транспортных средств. Кроме того, согласно имеющимся исследованиям, смартфон или портативные устройства GPS используются в качестве источника кинематических характеристик эвакуационного транспортного средства, которые не являются надежными для отслеживания и классификации транспортных средств в реальном времени. В целом можно сделать вывод, что доступные методы не являются надежным выбором для реального времени и глобального VC.Таким образом, исследование новой тенденции облачных или автомобильных сетей в качестве альтернативы традиционным приложениям VC является открытой областью исследований. В последние десятилетия автономное вождение привлекло огромное внимание как академических кругов, так и промышленности, и большие усилия были приложены к разработке транспортных средств, способных самостоятельно перемещаться по городским улицам [64,65,66,67,68]. В настоящее время автономные автомобили и автомобили с автопилотом быстро перемещаются по дорогам, и ожидается, что они произведут беспрецедентную революцию в транспортной системе.Беспилотный автомобиль Google был первым автономным автомобилем, который управлялся в городских условиях [69]. Концепция Daimler Smart EQ — еще один пример полностью автоматизированного транспортного средства, в котором водитель больше не нужен [70]. Tesla Motors разработала полуавтономное транспортное средство, названное автопилотом Tesla, с использованием искусственного интеллекта и аппаратных технологий с обновлением данных о вождении в реальном времени [71]. Такие автомобили оснащены датчиками, радарами, камерами и спутниковыми каналами для сбора, хранения и анализа огромного количества данных, касающихся дорожного движения [69].В этой статье термин «интеллектуальное транспортное средство» используется для обозначения универсального описателя транспортного средства, с которого данные об окружающей среде автоматически собираются с помощью сенсорных устройств, а затем сохраняются в централизованном бортовом аппаратном блоке для дальнейшей обработки. В эту группу входят все автономные автомобили или автомобили с автопилотом. Интеллектуальные автомобили — это развивающееся приложение автомобильной технологии, способное обнаруживать и контролировать свое окружение и мобилизовать услуги по запросу. Согласно данным Национального управления безопасности дорожного движения США (NHTSA), интеллектуальные транспортные средства можно разделить на пять уровней автономности, которые варьируются от отсутствия автоматизации (уровень 0) до полной автоматизации (уровень 5) [72].Пять этапов автономности интеллектуальных транспортных средств с указанием состояния транспортного средства и роли водителя, а также с примерами для каждого этапа представлены в. Умные автомобили оснащены различными датчиками, такими как обнаружение света и дальность (LiDAR), радар, камеры, тепловизионные камеры, ультразвуковые датчики, GPS-приемники и инерциальные измерительные устройства (IMU), которые каждую секунду генерируют огромные объемы данных [73,74 ]. Таблица 2Пять этапов автономности интеллектуальных транспортных средств.
Доступность интеллектуальной основы и общих инструментов для сбора и передачи данных, а также доступ к анонимной схеме, сохраняющей конфиденциальность для совместного использования информации и обмена данными, обеспечили уникальное сочетание свойств, что делает умные автомобили привлекательным выбором для многих высокотехнологичных приложений.VC может извлечь выгоду из этих технологий в значительно большей степени. Возможно, внедрение интеллектуальных технологий при проектировании и производстве новых транспортных средств послужило стимулом для разработки и внедрения интеллектуальных систем идентификации и классификации транспортных средств. Существующие подходы VC, за исключением методов на основе GPS, обычно имеют локальный характер и могут классифицировать транспортные средства, если целевое транспортное средство проходит через фиксированные датчики, проходит через зону мониторинга ближнего действия или является гибридом этих методов.Сбор информации о трафике в реальном времени, а также обеспечение глобального доступа к данным датчиков — два важных требования для надежного метода VC. Параметры, представляющие интерес в методах VC, обычно учитывают форму, то есть высоту, ширину и длину, скорость, вес и расстояние между осями, ускорение / замедление. Настоящая статья предназначена для изучения доступной литературы по методам ВК, чтобы дать обзор этой темы. Было проведено исследование с целью изучить возможные методы обнаружения, идентификации и классификации транспортных средств в глобальном масштабе и в режиме реального времени.Отобранные методы были включены в короткий список, и наиболее подходящий из них был выбран для технико-экономического обоснования. Идея «умных транспортных средств» относится к транспортным средствам, которые частично или полностью управляются компьютерами, использующими различные сенсорные платформы и камеры для сбора, хранения и обмена огромным объемом данных. Автомобильные специальные сети (VANET) — это новая часть интеллектуальной транспортной системы, которая вызвала большой интерес во всем мире в последнее десятилетие [75].VANET представляют собой сеть интеллектуальных взаимосвязанных транспортных средств и состоят из бортового блока (OBU) и стационарной точки доступа, называемых придорожными блоками (RSU) [76]. OBU — это устройство, устанавливаемое на каждом транспортном средстве, которое в основном включает в себя память, блок обработки, приемник GPS и антенну для подключения к Интернету на короткие расстояния [77]. OBU обеспечивает связь между транспортными средствами (V2V) или транспортными средствами для инфраструктуры RSU (V2I) [78]. Все транзакционные данные во время поездки записываются в аппаратный модуль, называемый регистратором данных о событиях (EDR), который представляет собой форму черного ящика в транспортном средстве [79].Каждое транспортное средство отправляет периодические данные в соседние транспортные средства [80]. Сохранение конфиденциальности и обеспечение безопасности передаваемых данных являются наиболее важными проблемами при надлежащем применении сетевых систем [81]. В результате между доверенными объектами сети используется безопасный механизм анонимного распределения ключей. Каждое распространенное сообщение содержит контент, подпись и сертификат. Сертификат полученного сообщения проверяется, и открытый ключ используется для расшифровки сертификата и личности отправителя [82]. Для описания явления ВК используются разные определения (см.). В то время как некоторые исследователи считают, что методы VC предполагают систему мониторинга / подсчета и не могут получать точную информацию непосредственно от каждого транспортного средства [35], другие принимают все методы, которые могут классифицировать транспортные средства по их соответствующим типам под термином VC [29,30]. Исследователи из первой группы, которые считают, что виртуальный канал не может получать точные данные о транспортном средстве, считают, что системы связи, такие как VANET, не следует рассматривать как особый метод для виртуального канала, в то время как другие имеют менее жесткое определение явления и рассматривают возможность использования мобильных сетей, таких как VANET как особый класс методов VC.Для одновременного соблюдения обоих этих критериев, методы, использующие точную информацию о транспортном средстве, также включены для потенциальных будущих приложений. VANET могли предоставлять глобальную информацию о транспортных средствах в режиме реального времени. Предоставляемая информация может быть параметрами мобильности, а также физическими параметрами транспортного средства. Результаты технико-экономического обоснования показывают, что в системе VANET информация о мобильности, например, положение, полоса движения, скорость, ускорение и замедление, а также физические характеристики транспортных средств, т.е.г., вес, высота и длина — используются для самых разных задач, таких как управление парковкой, управление дорожным движением, безопасность и предотвращение несчастных случаев. показывает краткое изложение обзоров литературы по VC. Таблица 3Сводка обзоров литературы по VC.
Представленный обзор доступной литературы по ВК показывает, что большая часть исследований на сегодняшний день в основном сосредоточена на методах, основанных на видении. В этих обзорных документах не было предпринято никаких конкретных попыток проанализировать потенциальное влияние интеллектуальных технологий в автомобильных сетях и коммуникациях на повышение эффективности и действенности систем VC.Тем не менее, существует только один обзорный документ, в котором обсуждаются другие функции, помимо тех, которые используются для фиксации закономерностей сцены, и в нем основное внимание уделяется традиционным методам VC. В некоторых обзорных статьях обсуждались VC с использованием транспортных средств, но в них упоминались только такие инструменты, как мобильные сенсорные устройства, такие как приемники GPS и смартфоны, в расплывчатых терминах. Кроме того, в этих обзорах обсуждались ограниченные аспекты каждой техники, а современные технологии обнаружения транспортных средств и связи не принимались во внимание.В статье Jain et al. [85] изучали различные схемы мониторинга трафика. Были оценены уязвимости этих методов и обсуждено возможное неправильное использование информации. В другом исследовании Боркар и Малик [97] рассмотрели применение акустических сигналов для оценки скорости, плотности и классификации транспортных средств. Исследование было сосредоточено только на интеллектуальных методах с использованием эффективных смартфонов, камер, дронов и роботизированных датчиков. В других исследованиях, например, Shukla и Saini [83], Yousaf et al.[84] и Daigavane et al. [86], в центре внимания исследования были техники, основанные на зрении. В течение почти двух лет ряд университетских ученых и отраслевых партнеров работали над проектом по разработке «автономных электромобилей для перевозки грузов и грузов». В ходе работы авторы столкнулись с различными проблемами, связанными с поиском надежного метода для извлечения параметров информации о мобильности, например, положения, полосы движения, скорости и ускорения / замедления, а также физических характеристик, т.е.g., вес, рост и длина — мимолетных транспортных средств в реальном времени и в глобальном масштабе, как указано в этой рукописи. Однако, когда исследование было расширено, стало ясно, что не существует ни одного обзорного исследования, которое бы обеспечивало такую же широту и глубину знаний, как мы ожидали, для решения вышеупомянутых целей. В результате была проведена пошаговая процедура для оценки эффективности существующих методов, используемых при характеристике, идентификации и классификации транспортных средств в их нормальных условиях эксплуатации, с одной стороны, и для исследования новых потенциальных вариантов, которые могут предоставить решения. для классификации дорожных транспортных средств, с другой стороны.Полученные данные показали, что доступные методы классификации транспортных средств не могут предоставить в реальном времени глобальные данные о физических характеристиках и мобильности дорожных транспортных средств в их нормальном рабочем состоянии. Настоящий обзор охватывает литературу по данной теме и проливает свет на потенциальные инновационные идеи для оптимизации, повышения качества и надежности извлеченных данных о транспортных средствах. Насколько известно авторам, это первое исследование, которое предоставило эти знания в том виде, в котором мы их представили.Авторы твердо убеждены, что классификация транспортных средств в дорожных системах в режиме реального времени с использованием облачных или автомобильных сетей будет новым направлением и открытой областью исследований для будущих исследований в качестве альтернативы существующим традиционным подходам к классификации транспортных средств. В следующих разделах обсуждаются обычные методы VC. После этого исследуется возможность использования VANET для приложений VC. На следующем этапе в этом документе составляется дорожная карта, нацеленная на то, чтобы обрисовать в общих чертах, как это видение может быть развито в качестве будущей работы, и, наконец, в Разделе 5 дается заключение. 2. Обычные методы классификации транспортных средствМетоды VC можно разделить в зависимости от среды обработки на три основные группы: интрузивные, ненавязчивые и внедорожные. Некоторые из доступных исследований используют комбинацию вышеупомянутых методов, которая классифицируется по категории множественного обнаружения. Группы и подгруппы каждого класса представлены в. Неинтрузивные датчики обычно располагаются рядом с интересующей дорогой или над ней, а в некоторых случаях один датчик может использоваться для нескольких полос движения.Установка и обслуживание датчиков, не требующих вмешательства, проще, чем датчики вмешательства, и на данные мониторинга не влияет качество покрытия [98]. Датчики проникновения обычно устанавливаются в отверстия на поверхности дороги, прокладывая туннели под поверхностью дороги или прикрепляя к поверхности дороги [99]. Как инвазивные, так и неинтрузивные датчики чувствительны к неблагоприятным условиям окружающей среды, внедрение требует высоких капитальных затрат и требует дорогостоящего обслуживания [100]. Датчики для бездорожья — это мобильные датчики, которые можно использовать с самолета, спутника или в транспортных средствах, оборудованных приемниками GPS [101].Дальнейшие подробности по классификации датчиков будут позже. 2.1. Методы, основанные на зренииМетоды, основанные на зрении, широко изучаются для VC, и наибольшее количество исследований VC с фиксированным местоположением относится к обнаружению видеоизображений. Камеры, используемые для сбора данных, могут быть системами видеонаблюдения, всенаправленными камерами [102], аэрофотоснимками [103,104], системами замкнутого телевидения (CCTV) [105,106] или обычными камерами [107,108]. В этих методах обычно используются методы обработки изображений для обнаружения, отслеживания и классификации транспортных средств.Обработка и классификация транспортных средств с использованием обнаружения видеоизображений включает в себя несколько этапов, которые обычно включают предварительную обработку, извлечение и выбор характеристик, а также классификацию. Предварительная обработка — это шаг к повышению качества изображений. Сегментация изображения, удаление теней и обработка окклюзии являются наиболее адаптированными методами обнаружения видеоизображений. Сегментация изображения — один из фундаментальных методов обработки изображений. Веласкес-Пупо и др. [14] представили высокопроизводительную систему технического зрения с одной статической камерой.В этом подходе движущиеся объекты сначала сегментируются с помощью модели смеси Гаусса (GMM), а после извлечения признаков отслеживание выполняется с помощью фильтра Калмана. Предлагаемая система может работать в реальном времени с F-мерой до 98,190% и F-мерой до 99,051% для автомобилей среднего размера. Chen et al. [109] использовали рекурсивно обновляемую GMM для сегментации. Преобразование многомерного сглаживания используется для повышения производительности сегментации. Машина векторов поддержки с ядром (SVM) используется для классификации модели.Singh et al. [110] представили веб-систему управления трафиком, использующую на этапе обработки методы сегментации, анализа больших двоичных объектов и изображения истории движения (MHI). Предлагаемая система отслеживает предполагаемую плотность транспортных средств в разных местах в разное время, чтобы помочь в выборе подходящего пути. Abinaya et al. [111] предложил метод повышения производительности VC на основе видео с использованием одной стандартной камеры. Надежная система на основе видео для обнаружения, отслеживания, классификации и подсчета транспортных средств с использованием управляемой маркером сегментации водораздела, фильтра Габора и машины опорных векторов (SVM).Результаты экспериментов показали значительно улучшенные характеристики сегментации водораздела в отношении обнаружения транспортных средств. Audebert et al. [103] представили основанный на глубоком обучении метод сегментации до обнаружения для обработки больших данных виртуального канала, полученных с помощью дистанционного зондирования. Была обучена глубокая, полностью сверточная сеть, и полученные семантические карты были использованы для сегментации. Сверточная нейронная сеть (CNN) была обучена для VC. Zhang et al. [112] описал процесс улучшения изображения с использованием пороговой сегментации и устранения шума.Объекты извлекаются с помощью извлечения Габора, затем SVM используется для классификации. Удаление теней — это этап обработки изображения, направленный на повышение качества видео или изображения для компьютерных систем. Jehad et al. [113] разработали метод быстрого обнаружения и подсчета транспортных средств с помощью видеокамеры. Представлена система для извлечения данных трафика с использованием обработки видеоизображений с использованием вычитания фона, удаления теней и анализа пикселей. Результаты показывают, что алгоритм способен подсчитать 95% транспортных средств даже в случае некоторого тряски в видеопотоке.Asaidi et al. [114] представили два подхода к усовершенствованию систем автоматического наблюдения за дорожным движением. Предлагается контрастная модель для удаления динамических теней. Показано, что предложенный подход превосходит другие методы с точностью классификации 96,96% и скоростью исключения теней 95–99%. Ян и др. [115] предложили систему для оценки транспортного потока для различного внешнего освещения и отбрасывания теней. Предлагается система мониторинга трафика для улучшения качества изображения с использованием выделения переднего плана, различения теней и инвариантов цвета и краев.Yu et al. [116] предложили основанный на длине метод классификации движущихся транспортных средств в режиме реального времени в видеопоследовательностях многополосного движения. После вычитания фона, удаления теней по краям, пороговых алгоритмов сегментации выполняется горизонтальная проекция для классификации транспортных средств. Результаты экспериментов показывают, что точность классификации больших и малых транспортных средств составляет 97,1% и 96,7% соответственно. Meher et al. [117] предложили метод повышения качества VC на основе зрения путем обнаружения и удаления движущихся теней.Возможности и преимущества метода сравнивались с существующими методами. Обработка окклюзии — это этап обработки изображения для отслеживания транспортного средства, когда оно находится в частично закрытом положении. Moutakki et al. [118] представили подход, использующий отслеживание обработки окклюзии и классификацию SVM одного класса (OC-SVM). Веласкес-Пупо и др. [14] использовали систему видеонаблюдения в реальном времени для классификации и подсчета транспортных средств с использованием модели кодовой книги и обработки окклюзии.Гистограммы ориентированного градиента, за которыми следует SVM, используются для классификации транспортных средств по их типу. На этапе извлечения признаков выбираются подходящие признаки для классификации транспортных средств. Особенности текстуры и формы, включая масштабно-инвариантное преобразование (SIFT) [119,120], ориентированное быстрое и поворотное краткое описание (ORB) [121,122], ускоренные надежные элементы (SURF) [123,124] и распознавание марки и модели автомобиля ( VMMR) [25,125], являются одними из наиболее распространенных функций, используемых для VC.Функции текстуры используются для преодоления недостатков характеристик цвета и интенсивности. Jayadurga et al. [126] улучшили производительность классификаторов транспортных средств на сильно текстурированном фоне. Извлечение гибридных признаков текстуры, включая статистические и спектральные особенности текстуры, используется без предварительной обработки для классификации. Достигнута точность классификации 90,1%, и результат сравнивался с различными методами из аналогичных работ в литературе. Chen et al. [105] применили рекурсивно обновленный алгоритм GMM для идентификации транспортных средств по их типу и цвету с использованием функций текстуры.Преобразование многомерного сглаживания используется для повышения производительности сегментации. Хорошие показатели признания были достигнуты для прагматичных венчурных капиталистов. Неинвазивные функции SIFT обычно используются для обнаружения ключевых точек. Характеристики, используемые в SIFT, не зависят от освещения, увеличения, перемещения и поворота изображений. Khanaa et al. [127] предложили SIFT и алгоритм согласования случайной выборки (RANSAC) для классификации дорожных транспортных средств и обновления характеристик и подсчета. Ambardekar et al.[128] реализовали групповой подход с использованием плотного представления функций SIFT для надежного VC с высокой межклассовой вариативностью с использованием видеонаблюдения. Рассматривались три класса: седаны, фургоны и такси. ORB — это дескриптор, который работает быстрее, чем SURF и SIFT, и меньше подвержен влиянию шума изображения. Song et al. [129] предложили структуру кластеризации траекторий для анализа транспортных средств с использованием алгоритма ORB. Используется метод согласования, основанный на расстоянии Хэмминга. Наконец, для классификации транспортных средств предлагается метод кластеризации.Точность предлагаемого метода может достигать 95%. Кроме того, можно оценить тип транспортного средства для реализации VC. VMMR — это сложное приложение для машинного зрения, основанное на распознавании автомобильных номеров. Biglari et al. [28] предложили каскадную частичную модель для VMMR. Эта система использует машину линейных опорных векторов (LSVM) для извлечения признаков. Каскадная схема используется для ускорения обработки на основе достоверности и частоты. Предложенный подход позволил достичь средней точности 97,01% на сложном наборе данных и средней точности 95.55% по набору данных CompCars. Сиддики и др. [12] предложили и оценили неизученные подходы для автоматизированного VMMR в реальном времени. Передние или задние изображения транспортных средств встраиваются в гистограммы на основе SURF (BOSURF), которые используются для обучения многоклассовых SVM для классификации. Результаты экспериментов подтверждают превосходство предложенной работы как по скорости обработки, так и по точности. VC — это последний этап определения классов транспортных средств. Методы опорной векторной машины (SVM) и нейронной сети (NN) широко используются для классификации извлеченных признаков.В, представлены некоторые из наиболее распространенных методов мягких вычислений, используемых для распознавания образов, классификации, обучения или прогнозирования в VC. Таблица 4Некоторые из наиболее распространенных методов программных вычислений, используемых для распознавания образов, классификации, обучения или прогнозирования в GPS, видеоизображения, аэрофотоснимков, радара, классификации транспортных средств на основе магнитных датчиков.
Существуют некоторые другие классификаторы и обучающие машины, которые также используются для VC, такие как лесное дерево [145] ближайший сосед [146 147 148], обучение дереву решений [149], машинный классификатор с экстремальным обучением [55], генетическая нечеткость классификатор, [150] классификатор основных компонентов ядра [151] и нелинейный классификатор ядра на основе гистограмм [38].В случаях, когда для обнаружения и классификации транспортных средств используются несколько датчиков, данные объединяются. Байесовские сети [105,152,153] являются распространенным методом объединения входных данных. 2.2. Методы дистанционного зондированияМетоды дистанционного зондирования являются одной из самых быстрорастущих тенденций в венчурном капитале из-за глобального характера информации, предоставляемой этими методами. Радар широко используется для обнаружения движущихся объектов на земле, например, при мониторинге трафика и VC. Азиз и др.[154] практиковал пассивные радиолокационные системы прямого рассеяния для ВК. Доплеровская сигнатура фиксируется, когда транспортное средство проходит через область рассеяния. Транспортные средства разделены по размерным категориям. Ли и др. [155] предложили радиолокационную систему с непрерывной частотной модуляцией (FMCW) для извлечения трех отличительных характеристик сигнала из поперечных сечений транспортных средств. SVM использовался для классификации извлеченных признаков. По результатам полевых измерений была достигнута точность более 90%.Абдулла и др. [50] исследовали автоматическую классификацию целей (ATC) на предмет выделения признаков. Комбинация Z-score и NN адаптирована для классификации извлеченных признаков. Полученные результаты показывают, что повышенная производительность была достигнута за счет использования большого количества функций. Chen et al. [156] использовал радар с синтезированной апертурой (SAR) для отслеживания и классификации транспортных средств. Эхо-сигналы от цели разлагаются на множество функций внутреннего режима (IMF) с использованием разложения по ансамблю эмпирических мод (EEMD).Эксперимент показывает, что успешность классификации достигает 90%. Saville et al. [146] исследовали данные широкополосных, широкоапертурных и поляриметрических радаров для ВК. Для проверки использовался эксперимент 10-VC в алгоритме тестирования связанного изображения с разделенными спектрами. LiDAR — это технология дистанционного зондирования, которая может генерировать доплеровский режим для обнаружения распределенных или жестких целей. LiDAR передает и принимает электромагнитное излучение, а извлеченные из транспортных средств характеристики анализируются после обработки данных [157,158]. Тепловизионные изображения показывают количество инфракрасной энергии, излучаемой, передаваемой и отражаемой транспортным средством. Большинство тепловизионных изображений используются для обнаружения техники на поле боя. Ян и др. [52] предложил новый метод извлечения признаков, основанный на контексте целевого признака (TTC), чтобы улучшить недостатки тепловизионных изображений для VC. Результаты проверки показывают, что предлагаемая функция TTC превосходит предыдущие методы. Khamayseh et al. [53] предложили надежную основу для классификации людей и транспортных средств по инфракрасным изображениям.Наблюдения за дорожным движением от инфракрасной интеллектуальной системы наблюдения собираются ситуационной осведомленностью (SA). Результаты экспериментов подтверждают эффективность предложенного фреймворка. Mei et al. [54] представили метод визуального отслеживания, рассматривая отслеживание как проблему разреженного приближения. Этот подход был подтвержден с помощью задачи отслеживания и классификации транспортных средств с использованием видеопоследовательностей наружного инфракрасного видео. Аэрофотоснимки — популярный источник информации в области дистанционного зондирования.Аэрофотоснимки имеют высокое разрешение и могут охватывать большую интересующую область. Несколько исследований были сосредоточены на использовании аэрофотоснимков для ВК. Ли и др. [104] использовали функции «Регионы с сверточной нейронной сетью» (R-CNN) для распознавания небольших транспортных средств по аэрофотоснимкам. Для повышения производительности использовались выбор карты функций и построение двухчастной основной сети. Эффективность предложенного расширения сети была проверена путем сравнения его с его прочными аналогами аналогичной формы.Audebert et al. [103] представили основанный на глубоком обучении метод сегментации до обнаружения для сегментации, обнаружения и классификации транспортных средств на аэрофотоснимках. Была обучена глубокая, полностью сверточная сеть, и полученные семантические карты используются для сегментации. 2.3. Магнитные датчикиМагнитные датчики могут обнаруживать искажение магнитного поля Земли, вызванное проезжающим транспортным средством [159]. Детекторы с магнитной петлей — наиболее часто используемые датчики в VC и мониторинге трафика [160].Магнитные петли обычно устанавливаются в виде однопетлевых детекторов, двухконтурных детекторов и асимметричных форм, например прямоугольных петель. В нескольких исследованиях изучалась возможность использования одноконтурных детекторов для ВК. Lamas-Seco et al. [20] смоделировали индуктивный петлевой детектор для изучения влияния важных характеристик транспортного средства на индуктивные сигнатуры. Полученные результаты как для прототипов, так и для имитатора индуктивного датчика показали схожие характеристики, что подтверждает модель, использованную в их работе.Coifman et al. [161] усовершенствовал нетрадиционные методы оценки скорости с помощью одноконтурных детекторов. Результаты, полученные с помощью этого метода, сравнивались с результатами, полученными от видеодетекторов и двухпетлевых детекторов. В этой работе успешно используются инвестиции, вложенные в однопетлевые станции подсчета детекторов. Meta et al. [46] представили метод VC, который использует сигнал, генерируемый одиночным индуктивным петлевым детектором. Представлен алгоритм VC, использующий классификаторы дискретного преобразования Фурье (DFT), анализа главных компонентов (PCA) и нейронной сети с обратным распространением (BPNN).Уровень признания для ВК составил 94,21%. Двухконтурные извещатели состоят из двух последовательных одноконтурных извещателей, расположенных на расстоянии нескольких метров друг от друга. Эти детекторы широко используются для получения информации о средней скорости, занятости и потоках в системах управления дорожным движением. Wu et al. [47] представили метод, который учитывает изменение ускорения в двухконтурном детекторе. Был определен новый параметр для ненаблюдаемого ускорения. Предложен метод уменьшения эффекта изменения ускорения в двухконтурных детекторах.Аналитически было показано, что ошибки из-за ускорения не приводят к ошибкам в классе длины. Предложенный подход снизил частоту ошибок классификации из-за ускорения как минимум в четыре раза по сравнению с лучшим традиционным методом. Wei et al. [162] представили гибридный метод определения фаз трафика с использованием переменных, полученных от индуктивных датчиков с двойным контуром. Гибридный метод включает в себя подходы уровня обслуживания и методы кластеризации K-средних для улучшения прояснения фазы потока трафика.Результат показывает, что по сравнению с существующими моделями точность увеличена с 42% до 92%. Ли и др. [163] исследовали статистический вывод относительно скорости транспортного средства и длины транспортного средства с использованием данных двухконтурного детектора. Статистические выводы для скорости и длины транспортного средства были исследованы с помощью байесовского анализа, чтобы установить формулы для онлайн-оценки скорости и длины. Метод был представлен с использованием реальных данных о трафике. Индуктивные петли также могут иметь асимметричную форму.Mocholí-Salcedo et al. [45] провели подробное исследование магнитного поля, создаваемого прямоугольными контурами в системах управления движением. Индуктивность численно рассчитанных магнитных контуров равна, и результаты сравниваются с наиболее часто используемыми эмпирическими методами расчета индуктивности. Было достигнуто большое сходство между эмпирическими и численными результатами. Магнитная сигнатура индукционной петли широко используется как функция для обнаружения и классификации транспортных средств в индуктивной петле [45, 160, 164]. Магнитные датчики менее дороги и сложны по сравнению с магнитными петлями и очень подходят для ВК. Несколько исследований изучали магнитные датчики для ВК в своих работах. Haj Mosa et al. [131] представили алгоритм обнаружения грузовиков с использованием одного единственного датчика. Новая концепция, основанная на Soft Radial Basis Cellular Neural Network (SRB-CNN), разработана, проверена и протестирована с отбором лучших представителей текущих связанных концепций классификации. Предлагаемый метод удовлетворяет требованиям, касающимся надежности, низкой стоимости, высокой скорости обработки, низкого потребления памяти и возможностей.He et al. [165] предложил подход к преодолению недостатков традиционного агрегирования данных из данных одноточечного датчика. Модель фильтр-фильтр-оболочка применяется для оценки и определения подмножеств неизбыточных функций. Машины вектора поддержки C (C-SVM) были созданы параллельно с оптимизацией роя частиц (PSO) для VC. Результаты показали, что точность классификации превышает 99%. Шарчевич и др. [166] представили анализ магнитных датчиков, реализуемых в микроконтроллерной системе.Разработан новый метод классификации метода на основе одного магнитного датчика с использованием классификатора NN. Ли и др. [142] предложил онлайн-метод ВК с использованием магнитного датчика. Извлекаются восемь признаков, затем модель дерева решений обучается на основе алгоритма дерева классификации и регрессии (CART) с минимальным числом выборок (MNS). Наконец, обученная модель дерева решений сокращается с помощью правила минимального сокращения ошибок (MEP). Результаты показывают, что предложенный метод позволяет классифицировать типы транспортных средств в режиме онлайн с такими преимуществами, как высокая точность классификации, надежность выборки и меньшее время выполнения.Ян и Лей [167] разработали систему обнаружения транспортных средств с использованием недорогих трехосных анизотропных магниторезистивных датчиков. Предлагается новый алгоритм конечного автомата с фиксированным порогом, основанный на дисперсии сигнала. Результаты экспериментов показали, что точность обнаружения и средняя точность классификации могут достигать 99,05% и 93,66% соответственно. Taghvaeeyan et al. [168] сосредоточился на разработке портативной системы придорожных магнитных датчиков для ВК. Показано, что сенсорная система может подсчитывать количество поворотов направо на перекрестке с точностью до 95%. 2.4. Пневматические трубки и другие датчикиПневматические трубки широко используются для временного подсчета трафика. Для сбора информации о скорости транспортного средства и осях необходимо удлинить две или несколько трубок на соответствующем расстоянии друг от друга. Пневматические трубки легко переносить и их можно просто разместить на поверхности дороги через полосы движения. Трубки крепятся гвоздями для мостовой или другими приспособлениями. Эти пробирки коммерчески доступны для классификации велосипедов и подсчета объема.Два исследования проводили свои исследования путем адаптации пневматических трубок [169, 170]. Пьезоэлектрические датчики изготовлены из материалов, которые преобразуют давление в электрические заряды в ответ на вибрации или механические удары. Пьезоэлектрические датчики встроены под поверхность тротуара на каждой полосе, покрытые эпоксидной смолой, для подсчета трафика и оценки расстояния между осями. Кроме того, скорость автомобиля и межосевое расстояние можно определить, когда два пьезоэлектрических датчика активируются одним и тем же транспортным средством.Эти датчики могут работать отдельно или в системе WIM. Сигналы, генерируемые пьезоэлектрическими датчиками, собираются в распределительной коробке на обочине дороги. Пьезоэлектрические датчики чувствительны к температуре и состоянию поверхности из-за колебаний напряжения. Раджаб и др. [19] представили технологию VC с использованием одноэлементного пьезоэлектрического датчика, расположенного по диагонали на полосе движения. Диагонально расположенные пьезоэлектрические полосковые датчики и методы машинного обучения используются для точной классификации транспортных средств.Тестирование на нескольких участках шоссе показало точность классификации до 97%. Santoso et al. [171] предложили систему пьезоэлектрических датчиков для измерения транспортного потока. Пьезоэлектрическая сенсорная система из пленки поливинилиденфторида (ПВДФ), покрытая металлическими электродами, предназначена для сбора данных и передачи данных измерений для измерения транспортного потока. Вывод показывает количество и тип транспортных средств в виде цифрового кода. Тензометрические датчики встроены в конструкцию для измерения реакции дорожного покрытия на деформацию.Характер реакции на динамическую деформацию различен для разных транспортных средств; таким образом, используя методы распознавания образов и классификации, можно выделить правильную группу транспортных средств. Аль-Таравне и др. [172] разработал систему VC, основанную на новых датчиках с оптоволоконной брэгговской решеткой (ВБР), установленной в дорожном покрытии. За изменением деформации следили встроенными датчиками трехмерной брэгговской решетки, армированной стекловолокном, с полимерными упаковками (3-D GFRP-FBG). Система VC состояла из обучающих алгоритмов SVM.Результаты полевых испытаний на реальных данных трафика показывают, что разработанная система может точно оценить VC с точностью 98,5%. Сейсмические датчики используются для регистрации колебаний грунта, создаваемых движущимися транспортными средствами. Сети сейсмических датчиков используются для сбора данных для определения местоположения и определения типов транспортных средств. Du et al. [173] применили фрактальное измерение (FD) для извлечения характеристик сейсмических сигналов для наземных целей. FD основан на методе морфологического покрытия (MC) для извлечения характеристик сейсмических сигналов для классификации наземных целей.Результаты экспериментов показали, что предложенные методы достигли точности 90% для ВК. Чжоу и др. [174] представили функцию, извлеченную из сейсмических сигналов, вызванных наземными транспортными средствами. Эта особенность была извлечена из сейсмических сигналов с использованием кратковременной спектральной плотности мощности (STPSD) для различения колесных и гусеничных транспортных средств. Это было проверено с использованием смешанных наборов данных из полевых экспериментов и SensIT, который представляет собой платформу для беспроводного обнаружения транспортных средств. показаны преимущества и недостатки каждого метода ВК. Таблица 5Плюсы и минусы методов ВК.
3. Потенциальные встроенные интеллектуальные датчики, встроенные устройства с поддержкой транспортных средствИнтеллектуальные антенные системы, установленные на транспортном средстве для передачи и приема сигналов, обладают уникальным сочетанием свойств, что делает интеллектуальные транспортные средства привлекательным выбором для многих высокотехнологичных приложений.ВК может получить большую выгоду от этих технологий. Задача и цель этого исследования — изучить способность различных методов с использованием транспортных средств извлекать кинематические и физические характеристики транспортных средств в реальном времени и в глобальном масштабе. Эта информация может использоваться для самых разных приложений, таких как управление парковкой, управление движением, безопасность и предотвращение несчастных случаев [149]. Автомобильные сети — это новая технология интеллектуальных транспортных систем для облегчения связи между соседними транспортными средствами в городских условиях и на шоссе.VANET — это класс мобильных сенсорных сетей, в которых транспортные средства на дороге ведут себя как мобильные сенсорные узлы [175]. Применение VANET направлено на оснащение транспортных средств бортовым блоком (OBU), чтобы они могли подключаться к глобальной сети транспортных средств, вызывая сотрудничество друг с другом и с ближайшей беспроводной инфраструктурой для обмена данными [175]. Синергетические связи между двумя мирами VANET и интеллектуальных транспортных средств очень многообещающи для обеспечения дальнейшей безопасности на дорогах и преимуществ для конечных пользователей [176].Интернет транспортных средств (IoV) — это типичное приложение Интернета вещей (IoT) в области транспорта, которое достигается за счет расширения возможностей VANET. 3.1. Методы на основе VANETVANET — очень многообещающая технология, которая появилась недавно и используется для различных приложений в области транспорта и дорожного движения [177]. VANET — это среда мобильной сети, которая обеспечивает связь между транспортными средствами и придорожными блоками (RSU) для обмена данными [175].Система дорожной информации на основе VANET состоит из транспортных средств, RSU и центров сертификации (CA). Система обычно оснащена бортовым блоком, антенной, GPS и другими сенсорными устройствами [178]. OBU — это небольшой компьютер, установленный на транспортном средстве для интеграции модулей вычислений, позиционирования, связи и взаимодействия с человеком [179]. OBU может иметь другие интерфейсы, такие как универсальная последовательная шина (USB) и Bluetooth, для связи с вычислительными устройствами (например, ноутбуками, смартфонами и персональными цифровыми помощниками (КПК)).RSU — это инфраструктура, размещенная вдоль дороги для обеспечения связи V2V [180]. Связь V2V позволяет транспортным средствам обмениваться информацией о дорожном движении через беспроводную связь малого радиуса действия [181]. Центры сертификации несут ответственность за выдачу сертификатов транспортным средствам, которые могут быть в форме электронных лицензий и анонимных пар ключей [182]. В системе VANET центрами сертификации могут быть государственные транспортные органы или производители транспортных средств [182]. На протяжении многих лет исследования VANET вызывали большой интерес как в академических кругах, так и в промышленности.С помощью VANET можно собирать большие объемы данных, которые более подробно рассматриваются ниже. В системе VANET информация о мобильности — например, положение, полоса движения, скорость, ускорение и замедление — а также параметры физических характеристик транспортных средств, например, вес, высота и длина, используются для самых разных такие приложения, как управление парковкой, управление движением, безопасность и предотвращение несчастных случаев [183]. В следующих разделах более подробно обсуждается информация, извлеченная с помощью VANET. 3.1.1. Параметры мобильности транспортных средствПриемники GPS широко используются в системах локализации VANET для извлечения информации о мобильности, включая местоположение, полосу движения [184], скорость, ускорение и замедление [23,185,186]. Padron et al. [187] представили систему совместной работы на основе VANET, оснащенную устройством GPS, часами реального времени и устройством беспроводной связи для передачи их кинематических параметров, таких как текущее местоположение, скорость и направление. Shao et al.[188] предложил совместную локализацию транспортных средств в сценариях шоссе с использованием кинематических параметров всех транспортных средств в кластере. Предлагаемый метод учитывает ускорение и замедление, а также другие кинематические параметры для получения более точных результатов. Nayak et al. [189] предложил алгоритм обнаружения высокоскоростных транспортных средств на основе местоположения в VANET. Предлагаемый алгоритм определяет полосу движения транспортного средства и обнаруживает нарушения скорости на основе разрешенной скорости в этой полосе. Смена полосы движения транспортного средства также учитывается с помощью указателей поворота транспортного средства.VANET может предоставить данные о транспортном средстве и водителе безопасным и надежным способом. GPS-приемники легко устанавливаются в автомобили. Однако приемники GPS не являются лучшим решением в этих случаях из-за их низкого диапазона точности — например, до 20 или 30 м — и ограничений при работе в помещении или в густонаселенных городских районах, где нет прямой видимости для спутников. По этим причинам информация GPS, вероятно, будет объединена с другими методами определения местоположения, такими как точный расчет [190,191], определение местоположения по сотовой сети [192,193] и локализация изображения / видео [194].Эта комбинация информации о локализации из разных источников может быть интегрирована с использованием методов слияния данных [195,196,197,198]. В VANET транспортные средства периодически отправляют маяки, чтобы сообщить информацию о своей личности, скорости, ускорении и положении. Правдивое расположение узлов важно для правильного применения. Boeira et al. [199] разработали беспроводную схему пятого поколения для позиционирования узлов. Транспортные средства в сети VANET, использующие сигналы GPS, могут столкнуться с ухудшением или полной потерей сигналов GPS из-за высокой скорости или заторов.Wisitpongphan et al. [200] разработали расширенный самокорректирующийся алгоритм локализации для повышения точности позиционирования и улучшения оценки локализации транспортных средств через VANET. Весовой коэффициент вводится в функцию путем объединения силы принятого сигнала с измеренным искажением процесса. Полученные результаты показывают, что новый алгоритм способствует лучшей и более эффективной локализации. Скорость автомобиля зависит от полосы и дороги.Однако на шоссе скорость может быть увеличена до 200 км / ч. Перемещение с высокой скоростью может повлиять на эффективность маршрутизации, быстро устаревшая информация о местоположении. Таким образом, Alwan et al. [201] предложили усовершенствовать механизмы маршрутизации на основе местоположения за счет оценки местоположения транспортного средства в реальном времени и возможных изменений частоты обмена данными на основе извлеченного высокоточного местоположения. С другой стороны, автомобильные заторы — это чрезвычайно важная проблема, которая может снизить эффективность базовой связи, вызывая проблемы широковещательного шторма [202].Проблемы широковещательного шторма — это сценарии, в которых чрезмерное количество широковещательных пакетов вызывает конфликты на канальном уровне. Wisitpongphan et al. [200] количественно оценили влияние широковещательных штормов в сетях VANET с точки зрения задержек сообщений и скорости потери пакетов. Кроме того, предлагаются схемы, позволяющие снизить уровень потери пакетов до 70% при сохранении задержек на приемлемом уровне. 3.1.2. Параметры физических характеристикВ литературе было предложено несколько схем VC для идентификации параметров физических характеристик транспортных средств.В настоящее время для обнаружения и отслеживания транспортных средств используются различные типы датчиков. Однако эти датчики могут быть разработаны для специальных маршрутов и могут покрывать только небольшое расстояние, где точность собранной информации ограничена [203]. VC на основе изображений — это еще один метод, использующий аэрофотоснимки с ненаправленной камеры, видеонаблюдения или обычные камеры. На качество изображения могут повлиять осадки, изменение освещенности или присутствие деревьев и других транспортных средств, блокирующих целевые транспортные средства. Изображения также могут быть низкого качества, а результаты могут быть недостаточно надежными для идентификации транспортного средства [139]. Автоматическое распознавание номерных знаков — это система в реальном времени, которая используется для автоматического распознавания номеров транспортных средств. Автоматическое распознавание номерных знаков — это метод, использующий оптическое распознавание символов для считывания номерных знаков транспортных средств. Методы автоматического распознавания номерных знаков имеют значительную частоту ошибок и высокую стоимость обработки транзакций [27,94]. Jain et al. [204] предоставил новый алгоритм распознавания номерных знаков для наблюдения за дорожным движением. Математическая морфология и искусственная нейронная сеть (ИНС) были применены для улучшения локализации и сегментации персонажей.Было указано, что алгоритм имеет точность классификации 97,06%, 95,10% и 94,12% для определения местоположения номерного знака, сегментации и распознавания символов, соответственно. Du et al. [205] провели всесторонний обзор недавних преимуществ автоматического распознавания номерных знаков. Обзоры Puranic et al. [206] и Gaikwad и Borole [207] охватывают другие аспекты автоматического распознавания номерных знаков. Идентификационный номер автомобиля (VIN) действует как уникальный идентификатор, отображающий уникальные характеристики, характеристики и производителя автомобиля.С помощью кода VIN можно определить модель, тип и марку целевого транспортного средства [208]. Митра и Мондал [203] предложили две схемы идентификации, аутентификации и отслеживания транспортных средств с использованием VIN в VANET. Некоторые модификации сделаны для включения большего числа производителей транспортных средств. VIN включает 17 символов в трех полях: World Manufacturing Identification (WMI), Раздел описания транспортного средства (VDS) и Раздел идентификатора транспортного средства (VIS). Поле WMI содержит три символа, второе поле — шесть символов, а поле VIS — восемь символов. Jalooli et al. [209] предложил интеллектуальное рекомендательное ограничение скорости для шоссе с использованием VANET. Предлагаемая консультативная система ограничения скорости дает эксклюзивные рекомендации по ограничению скорости на основе характеристик транспортного средства, включая тип, размер и возможности безопасности транспортного средства, а также дорожные и погодные условия. Alhammad et al. [210] предложили использовать VANET для резервирования парковочных мест на улице. Сообщение-запрос отправляется через бортовое устройство транспортного средства с необходимой информацией.Информация состоит из типа, размера и регистрационного номера транспортного средства, а также профиля водителя. У каждого автомобиля есть уникальный идентификационный номер, который служит отпечатком пальца автомобиля. 3.2. Методы на основе Интернета транспортных средств (IoV)Недавние прогнозы, касающиеся подключения устройств к Интернету, показали, что к 2020 году около 25 миллиардов «вещей» будут подключены к Интернету, из которых транспортные средства составят значительную часть [ 203]. Интернет вещей (IoT) — это среда для подключения электронной подсистемы к существующей инфраструктуре Интернета.Интернет вещей объединяет все аспекты нашей повседневной жизни с помощью умных гаджетов, которые связаны через Интернет. Интернет вещей — это особый аспект Интернета вещей, созданный интеграцией сетей VANET и Интернета вещей. В VANET транспортное средство, оснащенное бортовым блоком, может присоединиться к кластеру и обмениваться полезной информацией с окружающими транспортными средствами [211]. Транспортные средства в VANET в основном рассматриваются как узлы для распространения сообщений среди группы транспортных средств внутри интересующей области [203]. Тем не менее, в парадигме IoV транспортные средства рассматриваются как интеллектуальные устройства с сильными возможностями для вычислений, хранения и обучения, поддерживая их функцию связи постоянно работающей [212].Pathak et al. [213] обсудили преимущества использования парадигмы IoV в интеллектуальной транспортной системе и исследовали препятствия для успешного внедрения IoT. Для управления сценариями отгрузки и обработки была предложена новая транспортная архитектура на основе IoV. Результаты сравнительного исследования показали, что стоимость предлагаемого метода на 50% меньше, чем у традиционных методов. Интеллектуальные транспортные системы играют важную роль в повышении качества и интерактивности и могут значительно снизить затраты и потери, а также улучшить возможности управления движением в городской транспортной системе.Wang et al. [214] создал взвешенную модель для сетей зондирования IoV, используя набор данных GPS реального такси. Кроме того, для оптимальной передачи информации о трафике предлагается архитектура сбора информации о локальном трафике с использованием IoV. Результаты моделирования и теоретический анализ показывают эффективность и реализуемость предложенных нами моделей. Gu et al. [215] обсудили алгоритм локализации IoV и предложили метод его улучшения с помощью методов оптимизации. Результаты показали значительное повышение точности и надежности традиционных методов.
Какие автомобили имеют проекционные дисплеи на 2020 год? | NewsПроекционный дисплей, или HUD, становится все более распространенной и полезной функцией во многих автомобилях, которая проецирует важную информацию для водителя на лобовое стекло на прозрачном дисплее.Дисплей, видимый только с сиденья водителя, не отрывает взгляда водителя от дороги. Отображаемая информация зависит от производителя и обычно настраивается драйвером. Типичные элементы могут включать в себя спидометр, обороты двигателя, пошаговые инструкции, предупреждения о слепых зонах и даже информацию о дорожных знаках. Связано: Какие автомобили имеют функции автоматического вождения на 2020 год? Большинство автопроизводителей по-прежнему делают свои HUD необязательными, либо как часть пакета опций, либо как оборудование, включенное в более дорогой уровень отделки салона.Если вас интересует HUD, стоит отметить, что видимость HUD может пострадать, если вы носите поляризованные солнцезащитные очки. Если это вы, возьмите их с собой и протестируйте функцию, прежде чем платить за то, что вы не можете видеть постоянно. Если не интересует HUD, но он включен в уровень отделки салона или пакет опций, который вам нужен, или если это стандартное оборудование, вы всегда можете отключить его. Здесь представлены все автомобили 2020 модельного года, упорядоченные в алфавитном порядке по производителям, которые могут быть оснащены HUD в качестве стандартного или дополнительного оборудования.Имейте в виду, что любые модели могут включать в себя родственные им варианты — так, например, Acura RLX включает RLX Sport Hybrid, BMW 2 Series включает 2 Series Gran Coupe и M2, а Audi A4 включает A4 Allroad и S4 — хотя мы по-прежнему выделяем модели, которые сильно отличаются друг от друга, например внедорожники Land Rover Discovery и Range Rover. AcuraAudiБентли
BMW
Бьюик
Кадиллак
Шевроле
ФордБытиеGMC
HondaHyundai
ИнфинитиЯгуар
Киа
ЛамборджиниЛенд Ровер
ЛексусЛинкольн
Mazda
Mercedes-Benz
Мини
МицубисиПоршеРоллс-Ройс
SubaruТойота
Volvo
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||